
トンネル施工管理システム

【課題】切羽に近いところで一次インバート施工を安全に実施することができるようサポートするトンネル施工管理システムを提供する。
【解決手段】短いベンチでトンネル断面を上半部と下半部に分割して掘削を行う補助ベンチ付き全断面工法における上半鏡11、下半鏡21、及び、ベンチ部20と連続する下半部の下半盤15から下方に掘削されることによって形成される一次インバート施工部30におけるインバート鏡31の複数点の座標データを、前記座標データ取得手段によって取得する鏡データ取得手段と、前記鏡データ取得手段によるデータ取得を所定の時間間隔で実行させ、取得した座標データを計時データと共にデータ記憶手段に記憶させる定期スキャン手段と、前記定期スキャン手段に基づいて取得され、データ記憶手段に記憶されるデータをデータ処理手段によって解析する第1解析手段と、を有する。
【解決手段】短いベンチでトンネル断面を上半部と下半部に分割して掘削を行う補助ベンチ付き全断面工法における上半鏡11、下半鏡21、及び、ベンチ部20と連続する下半部の下半盤15から下方に掘削されることによって形成される一次インバート施工部30におけるインバート鏡31の複数点の座標データを、前記座標データ取得手段によって取得する鏡データ取得手段と、前記鏡データ取得手段によるデータ取得を所定の時間間隔で実行させ、取得した座標データを計時データと共にデータ記憶手段に記憶させる定期スキャン手段と、前記定期スキャン手段に基づいて取得され、データ記憶手段に記憶されるデータをデータ処理手段によって解析する第1解析手段と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、強度が弱い地山におけるトンネル掘削でインバート施工を管理するために用いるトンネル施工管理システムに関する。
【背景技術】
【0002】
強度が弱い地山におけるトンネル掘削を行うための工法として、トンネル断面を上半部と下半部に分割して掘削を行うロングベンチカット、ショートベンチカット、ミニベンチカットなどのベンチカット工法が知られている。
【0003】
また、強度が弱い地山では、上記のようなベンチカット工法で掘進すると共に、地山の挙動が安定した切羽(掘進方向最先端断面)から略100m〜150m程度の後方において、インバート施工を行い、これによりトンネル断面を閉合し、トンネルの力学的安定性を確保することが行われる。
【0004】
ここで、図13を参照して従来のインバート施工の概略について説明する。図13はトンネルTの掘進方向を横から見たトンネル断面の概略図であり、掘進方向は紙面における右から左の方向となっている。掘進方向最先端断面である切羽10においては、ベンチ部20が形成される。また、トンネルTの掘進方向にわたる内壁面に対しては、ロックボルト6が打たれると共に、鋼製支保工・吹付けコンクリート5(詳細は不図示)などから構成される支保構造が施されるようになっている。切羽10から、掘進方向に対しておよそ100〜150m後方にあたるインバート施工部40においては、バックホウなどの重機によって下方への掘削が行われ、さらに、不図示のインバートコンクリートを施し断面閉合を行うことでインバート施工が完了する。このようなインバートが施工された箇所は、トンネル断面全周にわたる補強がなされることとなり、力学的安定性が確保される。
【0005】
なお、このようなインバート施工に関連する技術については、特許文献1(特開2007−321490号公報)などに開示されている。
【特許文献1】特開2007−321490号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来のインバート施工においては、上述のように切羽10から略100〜150m後方の箇所で作業が実施されるため、トンネル断面の閉合によるトンネルの力学的安定性の確保が遅れ、結果的にトンネル内空変位などが増加しトンネル崩壊の危険性が高まるという問題があった。そこで、長さ2〜4m程度の短いベンチを設け切羽10の安定を図るとともに、上半部と下半部の同時施工により掘削効率の向上が図られる補助ベンチ付き全断面工法を採用するとともに、インバート部の施工を切羽10に近いところ(例えば、10m以内の地点)で行うことによって、早期に断面閉合を実現させトンネル断面の力学的安定を確保することで、トンネル内空変位の抑制を図ることも考えられる。一方、一般に切羽10の近くでは、トンネル掘削に伴う周辺地山の応力再配分が平衡に達しておらず、特に掘削断面積が大きい場合や地山の強度が弱い場合には周辺地山の挙動が不安定となるため、一次インバート施工部30における掘削およびインバートストラット、吹付けコンクリートなどの支保構造体の設置において、十分な安全性と出来形を確保することが難しい、という問題があった。
【0007】
なお、切羽10に近いところ(例えば、10m以内の地点)で施工されるインバートのことを一次インバートと称し、以後、切羽10から掘進方向に対しておよそ100〜15
0m後方で施工されるインバートと区別して表示するものとする。
【課題を解決するための手段】
【0008】
上記のような問題を解決するために、請求項1に係る発明は、所定の水平角、鉛直角に存在する対象点まで距離データを取得し、当該対象点の位置座標を取得する座標データ取得手段と、時刻を計時し、前記座標データ取得手段で座標データを取得した時刻に係る計時データを取得する計時データ取得手段と、前記座標データ取得手段及び前記計時データ取得手段によって取得された座標データ及び計時データを対応付けて記憶するデータ記憶手段と、前記データ記憶手段に記憶されるデータに基づいて、データ処理を行うデータ処理手段と、を有するトンネル施工管理システムであって、短いベンチでトンネル断面を上半部と下半部に分割して掘削を行う補助ベンチ付き全断面工法における上半鏡11の複数点の座標データ、及び、前記工法におけるベンチ部20の端部垂直面となる下半鏡21の複数点の座標データ、及び、前記ベンチ部20と連続する下半部の下半盤15から下方に掘削されることによって形成される一次インバート施工部30におけるインバート鏡31の複数点の座標データを、前記座標データ取得手段によって取得する鏡データ取得手段と、前記鏡データ取得手段によるデータ取得を所定の時間間隔で実行させ、取得した座標データを計時データと共に前記データ記憶手段に記憶させる定期スキャン手段と、前記定期スキャン手段に基づいて取得され、前記データ記憶手段に記憶されるデータを前記データ処理手段によって解析する第1解析手段と、を有することを特徴とする。
【0009】
また、請求項2に係る発明は、請求項1に記載のトンネル施工管理システムにおいて、前記第1解析手段による解析結果に基づいて報知を行う報知手段を有することを特徴とする。
【0010】
また、請求項3に係る発明は、請求項2に記載のトンネル施工管理システムにおいて、前記報知手段が回転灯又はサイレンであることを特徴とする。
【0011】
また、請求項4に係る発明は、請求項1乃至請求項3のいずれかに記載のトンネル施工管理システムにおいて、前記一次インバート施工部30における掘削中のインバート盤16の幅方向の複数点の座標データを、前記座標データ取得手段によって掘削中に任意のタイミングで適宜取得できる幅員データ取得手段と、前記幅員データ取得手段によるデータ取得を実行させ、取得した座標データを前記データ記憶手段に記憶させる幅員スキャン手段と、前記一次インバート施工部30の底盤形状の設計データを記憶する設計データ記憶手段と、前記幅員スキャン手段に基づいて取得され前記データ記憶手段に記憶されるデータと、前記設計データ記憶手段に記憶されるデータと、を前記データ処理手段によって解析する第2解析手段と、を有することを特徴とする。
【0012】
また、請求項5に係る発明は、請求項1乃至請求項4のいずれかに記載のトンネル施工管理システムにおいて、前記鏡データ取得手段における座標データ取得に用いるトータルステーションと、前記幅員スキャン手段における座標データ取得に用いるトータルステーションと、が異なることを特徴とする。
【発明の効果】
【0013】
本発明のトンネル施工管理システムによれば、短いベンチでトンネル断面を上半部と下半部に分割して掘削を行う補助ベンチ付き全断面工法における上半鏡11の複数点の座標データ、及び、前記工法におけるベンチ部20の端部垂直面となる下半鏡21の複数点の座標データ、及び、前記ベンチ部20と連続する下半部の下半盤15から下方に掘削されることによって形成される一次インバート施工部30におけるインバート鏡31の複数点の座標データを取得しこれらの経時変化を解析することで、現場で地山の挙動を把握することが可能となるので、強度が弱い地山の切羽10に近いところ(例えば、10m以内の
地点)でも掘削断面積が大きくなってしまう一次インバートの施工を安全に実施することができ、また一次インバート施工部30にける掘削中のインバート盤16の幅方向の複数点の座標データを掘削中に任意のタイミングで適宜取得し、前記一次インバート施工部30の底盤形状の設計データと比較解析することでインバート盤16の過度な掘削、あるいは掘削不足を防止するなどの出来形管理を実施し、インバートストラット、吹付けコンクリート32などの支保構造体を適切に配することで、早期にトンネル断面の閉合が完了し、工期短縮が可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態に係るトンネル施工管理システムが適用されたトンネル掘削工事現場の概略を示す図である。
【図2】トンネル掘削工事現場における切羽周辺の様子を示す図である。
【図3】本発明の実施の形態に係るトンネル施工管理システムのシステム構成例を示す図である。
【図4】本発明の実施の形態に係るトンネル施工管理システムにおける第1解析処理の処理フローを示す図である。
【図5】本発明の実施の形態に係るトンネル施工管理システムにおける鏡データ取得処理サブルーチンの処理フローを示す図である。
【図6】切羽近傍の鏡の様子を示す図である。
【図7】本発明の実施の形態に係るトンネル施工管理システムにおけるデータ記憶手段で記憶されるデータのデータ形式を説明する図である。
【図8】本発明の実施の形態に係るトンネル施工管理システムにおける第2解析処理の処理フローを示す図である。
【図9】本発明の実施の形態に係るトンネル施工管理システムにおける幅員データ取得処理を説明する図である。
【図10】本発明の実施の形態に係るトンネル施工管理システムにおける表示処理に基づく表示例を示す図である。
【図11】本発明の他の実施の形態に係るトンネル施工管理システムが適用されたトンネル掘削工事現場の概略を示す図である。
【図12】本発明の他の実施の形態に係るトンネル施工管理システムのシステム構成例を示す図である。
【図13】従来のインバート施工の概要を説明する図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態について図面を参照しつつ説明する。
【0016】
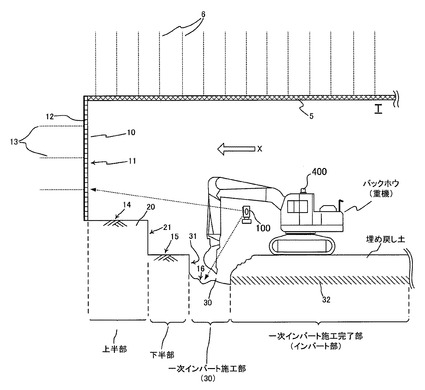
図1は本発明の実施の形態に係るトンネル施工管理システムが適用されたトンネル掘削工事現場の概略を示す図である。図1はトンネルTの掘進方向を横から見たトンネル断面の概略図であり、掘進方向は紙面における右から左の方向である。
【0017】
また、図1に示すトンネル掘削においては、短いベンチでトンネル断面を上半部と下半部に分割して掘削を行う補助ベンチ付き全断面工法が採用されており、切羽10の手前下方にベンチ部20が設けられている。切羽10における上半鏡11には、地山の状態が不安定となり、変位が増大し崩壊することを抑制するため、例えば、鏡ボルト13や鏡吹付けコンクリート12などの支保構造が施されるようになっている。
【0018】
ベンチ部20は、天面である上半盤14と、そこから連なる端部垂直面である下半鏡21とからなる段部である。上半盤14の長さは、掘削方向に2〜4m程度である。下半鏡21からは、1〜2m程度の下半盤15が連続しており、下半盤15から下方にバックホウ400などの重機によって掘削されることによって、一次インバート施工部30が図示
するように設けられる。この一次インバート施工部30の掘削が完了すると、インバートストラット(不図示)などの支保構造体を配して、このインバートストラットを既に設置済みの鋼製支保工(不図示)と連結したり、或いは、インバート吹付けコンクリート(不図示)を施したりすることによって、断面閉合が行われ一次インバート施工が完了する。このような一次インバートが施工された箇所は、トンネル断面全周にわたる補強がなされることとなり、力学的安定性が確保される。
【0019】
なお、後ほど切羽10から掘進方向に対しておよそ100〜150m後方にあたるインバート施工部40において、さらに不図示のインバートコンクリートを施し、インバート施工が完了する。
【0020】
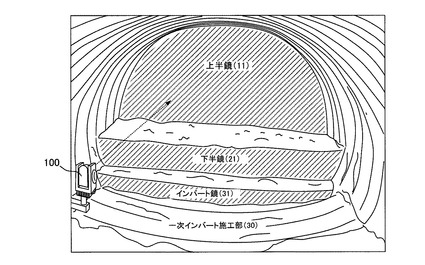
切羽10の直近にベンチ部20と一次インバート施工部30とが設けられた、上述したトンネル掘削工事現場の様子を図2に示す。図2は図1におけるXの方向から切羽10の周辺を見た図であり、図中の斜線で示す部分は垂直面を示している。切羽10近傍にベンチ部20と一次インバート施工部30とが設けられた状況においては、上から順に上半鏡11、下半鏡21、インバート鏡31をX方向から観察することが可能な状況となっている。本発明の実施形態に係るトンネル施工管理システムにおいては、ノンプリズムによる測量も可能なタイプのトータルステーション100を例えば、トンネル壁面など視認可能な位置に取り付けて、これら上半鏡11、下半鏡21、インバート鏡31に係る位置座標データを取得して、これを解析し、切羽10近傍における地山の挙動を把握する構成となっている。以下、このためのシステムについて説明する。
【0021】
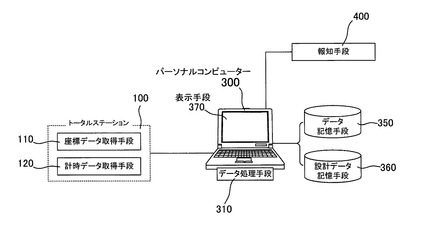
図3は本発明の実施の形態に係るトンネル施工管理システムのシステム構成例を示す図である。トータルステーション100は、ノンプリズムによる測量も可能なタイプのものであり、所定の水平角、鉛直角に存在する対象物に対して光波を射出し、対象物、もしくは対象物に設置された反射体で反射された光波を計測することによって、対象物との間の距離データを取得し、水平角、鉛直角、距離の各データから当該対象物の座標データを取得するものであり、例えば、ニコントリンブル社製トータルステーション5600ATSなどを用いることができる。また、トータルステーション100には、データ取得した時間を管理するための計時部などが設けられている。
【0022】
図3のブロック図における座標データ取得手段110は、所定の水平角、鉛直角に存在する対象点まで距離データを取得し、当該対象点の位置座標を取得するものであり、これはトータルステーション100に内蔵される機能を利用することができる。また、図3のブロック図における計時データ取得手段120は、時刻を計時し、座標データ取得手段110で座標データを取得した時刻に係る計時データを取得するものであり、これについても、同じくトータルステーション100に内蔵される機能を利用することができる。
【0023】
トータルステーション100は一般的に、外部の情報処理装置と接続可能なインターフェイス(不図示)が設けられており、本実施形態に係るトンネル施工管理システムでは、このようなインターフェイスを用いることによって、トータルステーション100で取得されたデータを、パーソナルコンピューター300に送信するようになっている。なお、トータルステーション100とパーソナルコンピューター300との間の通信接続には有線、無線の両方接続方式を利用することができるが、パーソナルコンピューター300をオペレーター室に配するような場合には、無線通信接続の形態を採用することが好ましい。
【0024】
パーソナルコンピューター300としては、例えばウィンドウズ(登録商標)をOS(オペレーティングシステム)とする現在広く普及しているものを利用することができる。このパーソナルコンピューター300のCPU(中央演算処理装置)は、本発明における
データ処理手段310として機能するものである。
【0025】
パーソナルコンピューター300のハードディスクドライブには、少なくともデータ記憶手段350、設計データ記憶手段360の2つのデータベースを設けるようにする。データ記憶手段350は、座標データ取得手段110及び前記計時データ取得手段120によって取得され、パーソナルコンピューター300に取り込まれた座標データ及び計時データを対応付けて記憶するものであり、また、設計データ記憶手段360はトンネルTの設計データや一次インバート施工部30の設計データを記憶するものである。
【0026】
パーソナルコンピューター300は、図示するバックホウなどのオペレーター室に設置されバックホウのオペレーターが操作したり、参照したりすることが想定されている。パーソナルコンピューター300に設けられるディスプレイなどの表示手段370は、テキストや画像などを表示し、バックホウのオペレーターに対して情報を提供するものである。
【0027】
パーソナルコンピューター300に設けられたインターフェイス(不図示)には、例えば回転灯などの報知手段400が接続されており、報知手段400はパーソナルコンピューター300からの制御に基づいて報知動作のオンオフを行うようになっている。なお、報知手段400は、バックホウ周辺で作業に従事する作業員に対して報知を行うことが可能なものであれば、どのようなものでもよく、回転灯などの他にサイレンや電光掲示板などのものも用いることができる。このような回転灯やサイレン、電光掲示板などによって、本発明では、周辺地山の崩壊危険度を近くの作業員に瞬時に周知させるものである。
【0028】
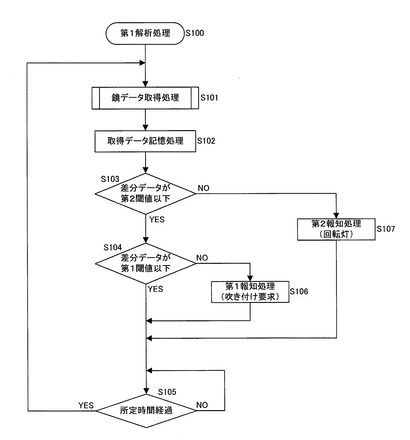
次に、以上のように構成されるシステムによる処理・動作の一例について説明する。本実施形態に係るトンネル施工管理システムの第1の目的は、切羽10近傍における地山の挙動を把握することである。このような切羽10近傍における地山の挙動把握のために、本実施形態では第1解析処理として定義するものが実行される。図4は本発明の実施の形態に係るトンネル施工管理システムにおける第1解析処理の処理フローを示す図である。このようなフローは、図1に示すような状況下でインバート施工を行っているときには常時実行させておき、切羽10近傍における地山の挙動を把握し、地山が危険な挙動を示したときには、これをオペレーターや作業員に報知する。
【0029】
図4において、ステップS100で第1解析処理が開始されると、続く、ステップS101においては、各垂直断面(鏡)に係るデータを取得する鏡データ取得処理のサブルーチンが実行される。ここで、図5を参照してこのサブルーチンを説明する。
【0030】
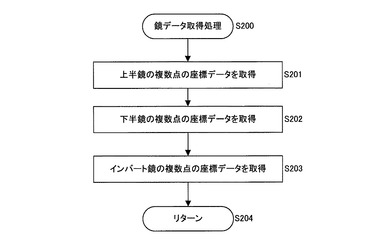
図5は本発明の実施の形態に係るトンネル施工管理システムにおける鏡データ取得処理サブルーチンの処理フローを示す図である。ステップS200でサブルーチンが開始されると、ステップS201においては、座標データ取得手段110によって、上半鏡の複数点の座標データを取得する。図6は切羽10近傍のそれぞれの鏡の様子を示す図である。図6に示すように、切羽10近傍には上半が形成する上半鏡11と、下半が形成する下半鏡21と、インバート施工部30によって形成されるインバート鏡31が存在するが、まずステップS201においては、上半鏡11における所定の3点(A1,A2,A3)に係
る座標データを取得する。このような着目点(A1,A2,A3)が、地山挙動把握のため
の観察対象となる。なお、上半鏡11に関連して取得する座標データの点数を3点とした例を挙げたが、本発明においては、取得する座標データの点数が3点に限定されるものではない。
【0031】
次のステップS202では、座標データ取得手段110によって、下半鏡の複数点の座標データを取得する。図6に示す例においては、下半鏡21における所定の3点(B1,
B2,B3)に係る座標データを取得する。このような着目点(B1,B2,B3)も、地山
挙動把握のための観察対象である。上半鏡11の場合同様、本発明において、取得する座標データの点数が3点に限定されるものではない。
【0032】
次のステップS203では、座標データ取得手段110によって、インバート鏡31の複数点の座標データを取得する。図6に示す例においては、インバート鏡31における所定の3点(C1,C2,C3)に係る座標データを取得する。このような着目点(C1,C2
,C3)も、地山挙動把握のための観察対象である。上記の場合同様、本発明において、
取得する座標データの座標データ点数が3点に限定されるものではない。ステップS204では、元のルーチンにリターンする。
【0033】
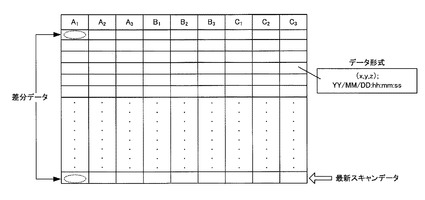
さて、図4のフローチャートに戻り、ステップS102においては、先のサブルーチンで取得されたデータをパーソナルコンピューター300のデータ記憶手段350に記憶する。ここで、データ記憶手段350で記憶されるデータ構造について説明する。図7は本発明の実施の形態に係るトンネル施工管理システムにおけるデータ記憶手段で記憶されるデータのデータ形式を説明する図である。
【0034】
前記のサブルーチンが実行されることで、トータルステーション100によるスキャン動作が行われるわけであるが、このスキャン動作によって上半鏡11における(A1,A2,A3)、下半鏡21における(B1,B2,B3)、インバート鏡31における(C1,C2,C3)の全9点の位置座標データと位置座標データを取得したタイミングに係る計時デ
ータとが取得される。図7に示すようにデータ記憶手段350では、これら9点に関して取得したデータを、それぞれ位置座標データとして(x,y,z)の形式で、また、計時データとしてYY/MM/DD:hh:mm:ssの形式で、1回のスキャン動作毎に順次蓄積することとなる。
【0035】
次のステップS103では、差分データが第2閾値以下であるか否かが判定される。ここで、図7によってA1の場合を例として差分データについて説明する。「差分データ」
とは、最新スキャンに基づく位置座標データと、最初に取得された位置座標データと間の変位として定義する。また、閾値は、差分データに基づく判定を行う際の基準値であり、第2閾値は後述する第1閾値より大きいものとする。すなわち、(第1閾値)<(第2閾値)である。
【0036】
なお、詳細はフローには示さないが、ステップS103では、上半鏡11における(A1,A2,A3)、下半鏡21における(B1,B2,B3)、インバート鏡31における(C1,C2,C3)の全9点に係る判定を行う。以下、代表で点A1を例に説明する。
【0037】
ステップS103における判定結果がNOである場合、すなわち、差分データが第2閾値を越えているような場合には、いずれかの鏡で大きな変状が発生したことになるので、ステップS107に進み、第1報知処理の報知レベルより大きい第2報知処理を行う。ここで、第2報知処理は、回転灯などの報知手段400を自動、もしくは手動でオンすることである。バックホウ周辺の作業員は、このような報知手段400の動作に応じて、掘進方向後方側に待避することが可能となる。
【0038】
このように、本発明のトンネル施工管理システムによれば、短いベンチでトンネル断面を上半部と下半部に分割して掘削を行う補助ベンチ付き全断面工法における上半鏡11の複数点の座標データ、及び、前記工法におけるベンチ部20の下半鏡21の複数点の座標データ、及び、前記ベンチ部20と連続する下半部の下半盤15から下方に掘削されることによって形成される一次インバート施工部30におけるインバート鏡31の複数点の座標データを取得しこれらの経時変化を解析することで、現場で地山の挙動を把握すること
が可能となるので、強度が弱い地山の切羽10に近いところ(例えば、10m以内の地点)でも掘削断面積が大きくなってしまう一次インバートの施工を安全に実施することができ、早期にトンネル断面の閉合が完了し、工期短縮が可能となる。
【0039】
さて、ステップS103で、差分データが第2閾値以下であるともの判定されると、次にステップS104に進む。ステップS104では、差分データが第1閾値以下であるか否かが判定される。ここで、差分データが第1閾値より大きく、かつ、第2閾値以下である場合には、有る程度の変状が把握された場合であるので、ステップS106に進み、報知レベルが第2報知処理より低い、第1報知処理が実行される。この第1報知処理としては、第2報知処理で使用するものとは色違いの回転灯などの報知手段400を自動、もしくは手動でオンすることである。バックホウ周辺の作業員は、このような報知手段400の動作に応じて、少なからず危険性が生じていることを認知することが可能となる。また、例えば、パーソナルコンピューター300の表示手段370において、鏡吹付けコンクリートなどの対策工の要求を行う表示を行い、オペレーターに対して必要とする処置を促すようにすることができる。
【0040】
ステップS105では、所定時間が経過した場合にステップS101に戻り、再びそれぞれの鏡部の各点のデータを取得する処理が実行される。
【0041】
なお、図4に示すフローでは、「差分データ」という概念を使って、変状の判定を行うようにしたが、これによらず、その他の方法で変状の判定を行うようにしてもよい。また、鏡部で取得した点のいずれかが、閾値を越えた場合に報知処理を実行するようにもできるし、鏡部で取得した全ての点の挙動を総合的に勘案して、報知処理を実行するようにもできる。
【0042】
また、図4に示すフローでは、第1閾値や第2閾値などの閾値は、手動で設定されることが望ましい。閾値は、現場の状況を把握した経験のある人によって設定した方が、よりきめの細かい対応が可能となるからである。というのは、掘削区分(地山のよしあしに係る区分)が同じ地山であっても、掘削状況や掘削地点などによって状況が変わってくるからである。
【0043】
また、図4に示すフローでは、第1報知処理としてオペレーターに対する吹付け要求などを、また、第2報知処理として回転灯による作業員に対する待避要求を、例にとって説明したが、報知処理の具体例はこれらに限定されるものではない。
【0044】
また、図4に示すフローでは、報知処理における報知レベルが2段階に設定されているが、より細かいレベルで報知処理を行うようにしてもよいし、また報知レベルを1段階だけに限定することもできる。
【0045】
次に、本実施形態に係るトンネル施工管理システムの第2の目的を実行するための第2解析処理について説明する。第1の目的は、これまで説明してきたように、切羽10近傍における地山の挙動を把握し、変状が大きくなったときに報知処理を行うことであったが、第2の目的は一次インバート施工部30における出来形を管理することにある。このような管理を行うために、本実施形態では第2解析処理として定義するものが実行される。
【0046】
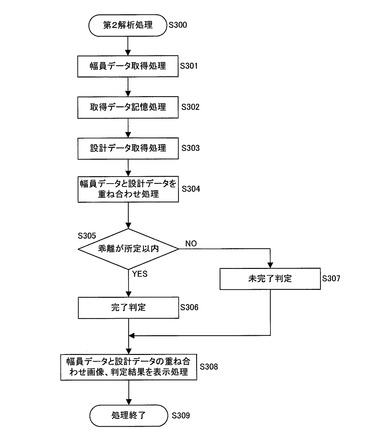
図8は本発明の実施の形態に係るトンネル施工管理システムにおける第2解析処理の処理フローを示す図である。第1解析処理の処理フローは一次インバート施工を行っているときに常時実行するものであったが、第2解析処理の処理フローは、オペレーターがパーソナルコンピューター300に対して、実行指示などを入力することで実行が開始されるものである。
【0047】
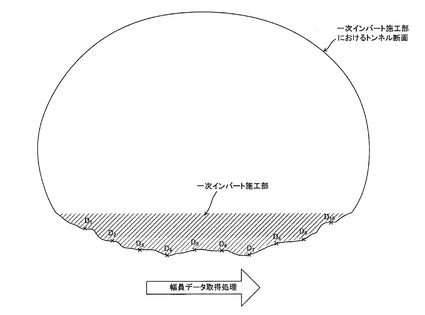
図8において、ステップS300で第2解析処理のフローが開始されると、続いて、ステップS301に進み、幅員データ取得処理が実行される。図9に基づいて、この幅員データ取得処理について説明する。図9は、一次インバート施工部30における所定のトンネル断面を示しており、幅員データ取得処理では、この一次インバート施工部30における所定の断面の幅員にわたる数点の座標データを取得する。図9に示す例では、座標データ取得手段110によって、一次インバート施工部30におけるD1乃至D10の10点に
係る掘削中のインバート盤16の位置座標データを取得するようにしている。すなわち、ステップS301では、トータルステーション100による幅員のスキャンによって、このようなD1乃至D10の10点に係る掘削中のインバート盤16の位置座標データを取得
するようにしている。
【0048】
続くステップS302においては、ステップS301で取得したデータを、データ記憶手段350に記憶する処理を実行する。次のステップS303では、前記所定の断面に係る底盤形状の設計データを設計データ記憶手段360から取得する。
【0049】
ステップS304においては、データ記憶手段350に記憶されている実測の幅員データと、設計データ記憶手段360から取得された設計データとを重ね合わせる処理を実行する。このような重ね合わせ処理を実行することで、実測の幅員データと設計データとがどの程度乖離しているかを把握することが可能となる。なお、2つのデータの乖離を計るためには種々の方法があるが、本実施形態に係るトンネル施工管理システムの従来周知のものを適宜用いることができる。
【0050】
ステップS305では、上記の乖離が所定以内であるかが判定される。ステップS305で乖離が所定内であれば、ステップS306に進み、完了判定を下し、乖離が所定を越えていれば、ステップS307に進み、未完了判定を下す。
【0051】
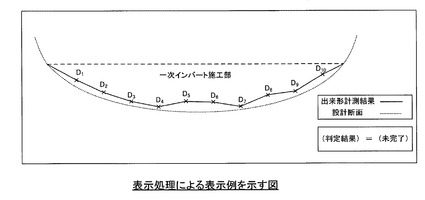
ステップS308においては、パーソナルコンピューター300の表示手段370において、幅員データと設計データの重ね合わせ画像、判定結果を表示する処理を実行する。図10にはこのような表示処理に基づく表示例を示す。ステップS309で処理を終了する。
【0052】
以上のような、本実施形態に係るトンネル施工管理システムの第2解析処理によれば、簡便に一次インバート施工部30における出来形管理を行うことが可能となり、現場での作業効率がアップする。
【0053】
次に、本発明の他の実施形態について説明する。図11は本発明の他の実施の形態に係るトンネル施工管理システムが適用されたトンネル掘削工事現場の概略を示す図であり、図12は本発明の他の実施の形態に係るトンネル施工管理システムのシステム構成例を示す図である。
【0054】
先の実施形態においては、1台のトータルステーション100を用いて第1解析処理、及び第2解析処理を実行するようにしていたが、他の実施形態においては、図11に示すように鏡データを取得するために用いるトータルステーション100と、幅員をスキャンするときに用いるトータルステーション200とを別々に設けるようにしている。この実施形態では、トータルステーション100は天井部に取り付け、トータルステーション200は先の実施形態と同様にトンネル内壁面に取り付けるようにしている。或いは、トータルステーション200については、三脚(不図示)を利用して用いることもできる。
【0055】
鏡データを取得するために用いるトータルステーション100は、切羽10から100
m〜150m程度離れていても、鏡の位置座標を取得することができる。したがって、トータルステーション100は一度設置すると、トンネル掘削が100m程度進行したとしても、切羽10に近づけるように設置し直す必要がない。このような実施形態によっても先の実施形態と同様の作用効果を享受することができる。
【0056】
以上、本発明のトンネル施工管理システムによれば、短いベンチでトンネル断面を上半部と下半部に分割して掘削を行う補助ベンチ付き全断面工法における上半鏡11の複数点の座標データ、及び、前記工法におけるベンチ部の下半鏡21の複数点の座標データ、及び、前記ベンチ部20と連続する下半部の下半盤15から下方に掘削されることによって形成される一次インバート施工部30におけるインバート鏡31の複数点の座標データを取得しこれらの経時変化を解析することで、現場で地山の挙動を把握することが可能となるので、強度が弱い地山の切羽10に近いところ(例えば、10m以内の地点)でも掘削断面積が大きくなってしまう一次インバートの施工を安全に実施することができ、また一次インバート施工部30にける掘削中のインバート盤16の幅方向の複数点の座標データを掘削中に任意のタイミングで適宜取得し、前記一次インバート施工部30の底盤形状の設計データと比較解析することでインバート盤16の過度な掘削、あるいは掘削不足を防止するなどの出来形管理を実施し、インバートストラット、吹付けコンクリート32などの支保構造体を適切に配することで、早期にトンネル断面の閉合が完了し、工期短縮が可能となる。
【符号の説明】
【0057】
5・・・鋼製支保工、吹付けコンクリート
6・・・ロックボルト
10・・・切羽
11・・・上半鏡
12・・・鏡吹付けコンクリート
13・・・鏡ボルト
14・・・上半盤
15・・・下半盤
16・・・インバート盤
20・・・ベンチ部
21・・・下半鏡
30・・・一次インバート施工部
31・・・インバート鏡
32・・・インバートストラット、吹付けコンクリート
40・・・インバート施工部
41・・・インバートコンクリート
100・・・トータルステーション
110・・・座標データ取得手段
120・・・計時データ取得手段
200・・・トータルステーション
210・・・座標データ取得手段
220・・・計時データ取得手段
300・・・パーソナルコンピューター
310・・・データ処理手段
350・・・データ記憶手段
360・・・設計データ記憶手段
370・・・表示手段
400・・・報知手段
【技術分野】
【0001】
本発明は、強度が弱い地山におけるトンネル掘削でインバート施工を管理するために用いるトンネル施工管理システムに関する。
【背景技術】
【0002】
強度が弱い地山におけるトンネル掘削を行うための工法として、トンネル断面を上半部と下半部に分割して掘削を行うロングベンチカット、ショートベンチカット、ミニベンチカットなどのベンチカット工法が知られている。
【0003】
また、強度が弱い地山では、上記のようなベンチカット工法で掘進すると共に、地山の挙動が安定した切羽(掘進方向最先端断面)から略100m〜150m程度の後方において、インバート施工を行い、これによりトンネル断面を閉合し、トンネルの力学的安定性を確保することが行われる。
【0004】
ここで、図13を参照して従来のインバート施工の概略について説明する。図13はトンネルTの掘進方向を横から見たトンネル断面の概略図であり、掘進方向は紙面における右から左の方向となっている。掘進方向最先端断面である切羽10においては、ベンチ部20が形成される。また、トンネルTの掘進方向にわたる内壁面に対しては、ロックボルト6が打たれると共に、鋼製支保工・吹付けコンクリート5(詳細は不図示)などから構成される支保構造が施されるようになっている。切羽10から、掘進方向に対しておよそ100〜150m後方にあたるインバート施工部40においては、バックホウなどの重機によって下方への掘削が行われ、さらに、不図示のインバートコンクリートを施し断面閉合を行うことでインバート施工が完了する。このようなインバートが施工された箇所は、トンネル断面全周にわたる補強がなされることとなり、力学的安定性が確保される。
【0005】
なお、このようなインバート施工に関連する技術については、特許文献1(特開2007−321490号公報)などに開示されている。
【特許文献1】特開2007−321490号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来のインバート施工においては、上述のように切羽10から略100〜150m後方の箇所で作業が実施されるため、トンネル断面の閉合によるトンネルの力学的安定性の確保が遅れ、結果的にトンネル内空変位などが増加しトンネル崩壊の危険性が高まるという問題があった。そこで、長さ2〜4m程度の短いベンチを設け切羽10の安定を図るとともに、上半部と下半部の同時施工により掘削効率の向上が図られる補助ベンチ付き全断面工法を採用するとともに、インバート部の施工を切羽10に近いところ(例えば、10m以内の地点)で行うことによって、早期に断面閉合を実現させトンネル断面の力学的安定を確保することで、トンネル内空変位の抑制を図ることも考えられる。一方、一般に切羽10の近くでは、トンネル掘削に伴う周辺地山の応力再配分が平衡に達しておらず、特に掘削断面積が大きい場合や地山の強度が弱い場合には周辺地山の挙動が不安定となるため、一次インバート施工部30における掘削およびインバートストラット、吹付けコンクリートなどの支保構造体の設置において、十分な安全性と出来形を確保することが難しい、という問題があった。
【0007】
なお、切羽10に近いところ(例えば、10m以内の地点)で施工されるインバートのことを一次インバートと称し、以後、切羽10から掘進方向に対しておよそ100〜15
0m後方で施工されるインバートと区別して表示するものとする。
【課題を解決するための手段】
【0008】
上記のような問題を解決するために、請求項1に係る発明は、所定の水平角、鉛直角に存在する対象点まで距離データを取得し、当該対象点の位置座標を取得する座標データ取得手段と、時刻を計時し、前記座標データ取得手段で座標データを取得した時刻に係る計時データを取得する計時データ取得手段と、前記座標データ取得手段及び前記計時データ取得手段によって取得された座標データ及び計時データを対応付けて記憶するデータ記憶手段と、前記データ記憶手段に記憶されるデータに基づいて、データ処理を行うデータ処理手段と、を有するトンネル施工管理システムであって、短いベンチでトンネル断面を上半部と下半部に分割して掘削を行う補助ベンチ付き全断面工法における上半鏡11の複数点の座標データ、及び、前記工法におけるベンチ部20の端部垂直面となる下半鏡21の複数点の座標データ、及び、前記ベンチ部20と連続する下半部の下半盤15から下方に掘削されることによって形成される一次インバート施工部30におけるインバート鏡31の複数点の座標データを、前記座標データ取得手段によって取得する鏡データ取得手段と、前記鏡データ取得手段によるデータ取得を所定の時間間隔で実行させ、取得した座標データを計時データと共に前記データ記憶手段に記憶させる定期スキャン手段と、前記定期スキャン手段に基づいて取得され、前記データ記憶手段に記憶されるデータを前記データ処理手段によって解析する第1解析手段と、を有することを特徴とする。
【0009】
また、請求項2に係る発明は、請求項1に記載のトンネル施工管理システムにおいて、前記第1解析手段による解析結果に基づいて報知を行う報知手段を有することを特徴とする。
【0010】
また、請求項3に係る発明は、請求項2に記載のトンネル施工管理システムにおいて、前記報知手段が回転灯又はサイレンであることを特徴とする。
【0011】
また、請求項4に係る発明は、請求項1乃至請求項3のいずれかに記載のトンネル施工管理システムにおいて、前記一次インバート施工部30における掘削中のインバート盤16の幅方向の複数点の座標データを、前記座標データ取得手段によって掘削中に任意のタイミングで適宜取得できる幅員データ取得手段と、前記幅員データ取得手段によるデータ取得を実行させ、取得した座標データを前記データ記憶手段に記憶させる幅員スキャン手段と、前記一次インバート施工部30の底盤形状の設計データを記憶する設計データ記憶手段と、前記幅員スキャン手段に基づいて取得され前記データ記憶手段に記憶されるデータと、前記設計データ記憶手段に記憶されるデータと、を前記データ処理手段によって解析する第2解析手段と、を有することを特徴とする。
【0012】
また、請求項5に係る発明は、請求項1乃至請求項4のいずれかに記載のトンネル施工管理システムにおいて、前記鏡データ取得手段における座標データ取得に用いるトータルステーションと、前記幅員スキャン手段における座標データ取得に用いるトータルステーションと、が異なることを特徴とする。
【発明の効果】
【0013】
本発明のトンネル施工管理システムによれば、短いベンチでトンネル断面を上半部と下半部に分割して掘削を行う補助ベンチ付き全断面工法における上半鏡11の複数点の座標データ、及び、前記工法におけるベンチ部20の端部垂直面となる下半鏡21の複数点の座標データ、及び、前記ベンチ部20と連続する下半部の下半盤15から下方に掘削されることによって形成される一次インバート施工部30におけるインバート鏡31の複数点の座標データを取得しこれらの経時変化を解析することで、現場で地山の挙動を把握することが可能となるので、強度が弱い地山の切羽10に近いところ(例えば、10m以内の
地点)でも掘削断面積が大きくなってしまう一次インバートの施工を安全に実施することができ、また一次インバート施工部30にける掘削中のインバート盤16の幅方向の複数点の座標データを掘削中に任意のタイミングで適宜取得し、前記一次インバート施工部30の底盤形状の設計データと比較解析することでインバート盤16の過度な掘削、あるいは掘削不足を防止するなどの出来形管理を実施し、インバートストラット、吹付けコンクリート32などの支保構造体を適切に配することで、早期にトンネル断面の閉合が完了し、工期短縮が可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態に係るトンネル施工管理システムが適用されたトンネル掘削工事現場の概略を示す図である。
【図2】トンネル掘削工事現場における切羽周辺の様子を示す図である。
【図3】本発明の実施の形態に係るトンネル施工管理システムのシステム構成例を示す図である。
【図4】本発明の実施の形態に係るトンネル施工管理システムにおける第1解析処理の処理フローを示す図である。
【図5】本発明の実施の形態に係るトンネル施工管理システムにおける鏡データ取得処理サブルーチンの処理フローを示す図である。
【図6】切羽近傍の鏡の様子を示す図である。
【図7】本発明の実施の形態に係るトンネル施工管理システムにおけるデータ記憶手段で記憶されるデータのデータ形式を説明する図である。
【図8】本発明の実施の形態に係るトンネル施工管理システムにおける第2解析処理の処理フローを示す図である。
【図9】本発明の実施の形態に係るトンネル施工管理システムにおける幅員データ取得処理を説明する図である。
【図10】本発明の実施の形態に係るトンネル施工管理システムにおける表示処理に基づく表示例を示す図である。
【図11】本発明の他の実施の形態に係るトンネル施工管理システムが適用されたトンネル掘削工事現場の概略を示す図である。
【図12】本発明の他の実施の形態に係るトンネル施工管理システムのシステム構成例を示す図である。
【図13】従来のインバート施工の概要を説明する図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態について図面を参照しつつ説明する。
【0016】
図1は本発明の実施の形態に係るトンネル施工管理システムが適用されたトンネル掘削工事現場の概略を示す図である。図1はトンネルTの掘進方向を横から見たトンネル断面の概略図であり、掘進方向は紙面における右から左の方向である。
【0017】
また、図1に示すトンネル掘削においては、短いベンチでトンネル断面を上半部と下半部に分割して掘削を行う補助ベンチ付き全断面工法が採用されており、切羽10の手前下方にベンチ部20が設けられている。切羽10における上半鏡11には、地山の状態が不安定となり、変位が増大し崩壊することを抑制するため、例えば、鏡ボルト13や鏡吹付けコンクリート12などの支保構造が施されるようになっている。
【0018】
ベンチ部20は、天面である上半盤14と、そこから連なる端部垂直面である下半鏡21とからなる段部である。上半盤14の長さは、掘削方向に2〜4m程度である。下半鏡21からは、1〜2m程度の下半盤15が連続しており、下半盤15から下方にバックホウ400などの重機によって掘削されることによって、一次インバート施工部30が図示
するように設けられる。この一次インバート施工部30の掘削が完了すると、インバートストラット(不図示)などの支保構造体を配して、このインバートストラットを既に設置済みの鋼製支保工(不図示)と連結したり、或いは、インバート吹付けコンクリート(不図示)を施したりすることによって、断面閉合が行われ一次インバート施工が完了する。このような一次インバートが施工された箇所は、トンネル断面全周にわたる補強がなされることとなり、力学的安定性が確保される。
【0019】
なお、後ほど切羽10から掘進方向に対しておよそ100〜150m後方にあたるインバート施工部40において、さらに不図示のインバートコンクリートを施し、インバート施工が完了する。
【0020】
切羽10の直近にベンチ部20と一次インバート施工部30とが設けられた、上述したトンネル掘削工事現場の様子を図2に示す。図2は図1におけるXの方向から切羽10の周辺を見た図であり、図中の斜線で示す部分は垂直面を示している。切羽10近傍にベンチ部20と一次インバート施工部30とが設けられた状況においては、上から順に上半鏡11、下半鏡21、インバート鏡31をX方向から観察することが可能な状況となっている。本発明の実施形態に係るトンネル施工管理システムにおいては、ノンプリズムによる測量も可能なタイプのトータルステーション100を例えば、トンネル壁面など視認可能な位置に取り付けて、これら上半鏡11、下半鏡21、インバート鏡31に係る位置座標データを取得して、これを解析し、切羽10近傍における地山の挙動を把握する構成となっている。以下、このためのシステムについて説明する。
【0021】
図3は本発明の実施の形態に係るトンネル施工管理システムのシステム構成例を示す図である。トータルステーション100は、ノンプリズムによる測量も可能なタイプのものであり、所定の水平角、鉛直角に存在する対象物に対して光波を射出し、対象物、もしくは対象物に設置された反射体で反射された光波を計測することによって、対象物との間の距離データを取得し、水平角、鉛直角、距離の各データから当該対象物の座標データを取得するものであり、例えば、ニコントリンブル社製トータルステーション5600ATSなどを用いることができる。また、トータルステーション100には、データ取得した時間を管理するための計時部などが設けられている。
【0022】
図3のブロック図における座標データ取得手段110は、所定の水平角、鉛直角に存在する対象点まで距離データを取得し、当該対象点の位置座標を取得するものであり、これはトータルステーション100に内蔵される機能を利用することができる。また、図3のブロック図における計時データ取得手段120は、時刻を計時し、座標データ取得手段110で座標データを取得した時刻に係る計時データを取得するものであり、これについても、同じくトータルステーション100に内蔵される機能を利用することができる。
【0023】
トータルステーション100は一般的に、外部の情報処理装置と接続可能なインターフェイス(不図示)が設けられており、本実施形態に係るトンネル施工管理システムでは、このようなインターフェイスを用いることによって、トータルステーション100で取得されたデータを、パーソナルコンピューター300に送信するようになっている。なお、トータルステーション100とパーソナルコンピューター300との間の通信接続には有線、無線の両方接続方式を利用することができるが、パーソナルコンピューター300をオペレーター室に配するような場合には、無線通信接続の形態を採用することが好ましい。
【0024】
パーソナルコンピューター300としては、例えばウィンドウズ(登録商標)をOS(オペレーティングシステム)とする現在広く普及しているものを利用することができる。このパーソナルコンピューター300のCPU(中央演算処理装置)は、本発明における
データ処理手段310として機能するものである。
【0025】
パーソナルコンピューター300のハードディスクドライブには、少なくともデータ記憶手段350、設計データ記憶手段360の2つのデータベースを設けるようにする。データ記憶手段350は、座標データ取得手段110及び前記計時データ取得手段120によって取得され、パーソナルコンピューター300に取り込まれた座標データ及び計時データを対応付けて記憶するものであり、また、設計データ記憶手段360はトンネルTの設計データや一次インバート施工部30の設計データを記憶するものである。
【0026】
パーソナルコンピューター300は、図示するバックホウなどのオペレーター室に設置されバックホウのオペレーターが操作したり、参照したりすることが想定されている。パーソナルコンピューター300に設けられるディスプレイなどの表示手段370は、テキストや画像などを表示し、バックホウのオペレーターに対して情報を提供するものである。
【0027】
パーソナルコンピューター300に設けられたインターフェイス(不図示)には、例えば回転灯などの報知手段400が接続されており、報知手段400はパーソナルコンピューター300からの制御に基づいて報知動作のオンオフを行うようになっている。なお、報知手段400は、バックホウ周辺で作業に従事する作業員に対して報知を行うことが可能なものであれば、どのようなものでもよく、回転灯などの他にサイレンや電光掲示板などのものも用いることができる。このような回転灯やサイレン、電光掲示板などによって、本発明では、周辺地山の崩壊危険度を近くの作業員に瞬時に周知させるものである。
【0028】
次に、以上のように構成されるシステムによる処理・動作の一例について説明する。本実施形態に係るトンネル施工管理システムの第1の目的は、切羽10近傍における地山の挙動を把握することである。このような切羽10近傍における地山の挙動把握のために、本実施形態では第1解析処理として定義するものが実行される。図4は本発明の実施の形態に係るトンネル施工管理システムにおける第1解析処理の処理フローを示す図である。このようなフローは、図1に示すような状況下でインバート施工を行っているときには常時実行させておき、切羽10近傍における地山の挙動を把握し、地山が危険な挙動を示したときには、これをオペレーターや作業員に報知する。
【0029】
図4において、ステップS100で第1解析処理が開始されると、続く、ステップS101においては、各垂直断面(鏡)に係るデータを取得する鏡データ取得処理のサブルーチンが実行される。ここで、図5を参照してこのサブルーチンを説明する。
【0030】
図5は本発明の実施の形態に係るトンネル施工管理システムにおける鏡データ取得処理サブルーチンの処理フローを示す図である。ステップS200でサブルーチンが開始されると、ステップS201においては、座標データ取得手段110によって、上半鏡の複数点の座標データを取得する。図6は切羽10近傍のそれぞれの鏡の様子を示す図である。図6に示すように、切羽10近傍には上半が形成する上半鏡11と、下半が形成する下半鏡21と、インバート施工部30によって形成されるインバート鏡31が存在するが、まずステップS201においては、上半鏡11における所定の3点(A1,A2,A3)に係
る座標データを取得する。このような着目点(A1,A2,A3)が、地山挙動把握のため
の観察対象となる。なお、上半鏡11に関連して取得する座標データの点数を3点とした例を挙げたが、本発明においては、取得する座標データの点数が3点に限定されるものではない。
【0031】
次のステップS202では、座標データ取得手段110によって、下半鏡の複数点の座標データを取得する。図6に示す例においては、下半鏡21における所定の3点(B1,
B2,B3)に係る座標データを取得する。このような着目点(B1,B2,B3)も、地山
挙動把握のための観察対象である。上半鏡11の場合同様、本発明において、取得する座標データの点数が3点に限定されるものではない。
【0032】
次のステップS203では、座標データ取得手段110によって、インバート鏡31の複数点の座標データを取得する。図6に示す例においては、インバート鏡31における所定の3点(C1,C2,C3)に係る座標データを取得する。このような着目点(C1,C2
,C3)も、地山挙動把握のための観察対象である。上記の場合同様、本発明において、
取得する座標データの座標データ点数が3点に限定されるものではない。ステップS204では、元のルーチンにリターンする。
【0033】
さて、図4のフローチャートに戻り、ステップS102においては、先のサブルーチンで取得されたデータをパーソナルコンピューター300のデータ記憶手段350に記憶する。ここで、データ記憶手段350で記憶されるデータ構造について説明する。図7は本発明の実施の形態に係るトンネル施工管理システムにおけるデータ記憶手段で記憶されるデータのデータ形式を説明する図である。
【0034】
前記のサブルーチンが実行されることで、トータルステーション100によるスキャン動作が行われるわけであるが、このスキャン動作によって上半鏡11における(A1,A2,A3)、下半鏡21における(B1,B2,B3)、インバート鏡31における(C1,C2,C3)の全9点の位置座標データと位置座標データを取得したタイミングに係る計時デ
ータとが取得される。図7に示すようにデータ記憶手段350では、これら9点に関して取得したデータを、それぞれ位置座標データとして(x,y,z)の形式で、また、計時データとしてYY/MM/DD:hh:mm:ssの形式で、1回のスキャン動作毎に順次蓄積することとなる。
【0035】
次のステップS103では、差分データが第2閾値以下であるか否かが判定される。ここで、図7によってA1の場合を例として差分データについて説明する。「差分データ」
とは、最新スキャンに基づく位置座標データと、最初に取得された位置座標データと間の変位として定義する。また、閾値は、差分データに基づく判定を行う際の基準値であり、第2閾値は後述する第1閾値より大きいものとする。すなわち、(第1閾値)<(第2閾値)である。
【0036】
なお、詳細はフローには示さないが、ステップS103では、上半鏡11における(A1,A2,A3)、下半鏡21における(B1,B2,B3)、インバート鏡31における(C1,C2,C3)の全9点に係る判定を行う。以下、代表で点A1を例に説明する。
【0037】
ステップS103における判定結果がNOである場合、すなわち、差分データが第2閾値を越えているような場合には、いずれかの鏡で大きな変状が発生したことになるので、ステップS107に進み、第1報知処理の報知レベルより大きい第2報知処理を行う。ここで、第2報知処理は、回転灯などの報知手段400を自動、もしくは手動でオンすることである。バックホウ周辺の作業員は、このような報知手段400の動作に応じて、掘進方向後方側に待避することが可能となる。
【0038】
このように、本発明のトンネル施工管理システムによれば、短いベンチでトンネル断面を上半部と下半部に分割して掘削を行う補助ベンチ付き全断面工法における上半鏡11の複数点の座標データ、及び、前記工法におけるベンチ部20の下半鏡21の複数点の座標データ、及び、前記ベンチ部20と連続する下半部の下半盤15から下方に掘削されることによって形成される一次インバート施工部30におけるインバート鏡31の複数点の座標データを取得しこれらの経時変化を解析することで、現場で地山の挙動を把握すること
が可能となるので、強度が弱い地山の切羽10に近いところ(例えば、10m以内の地点)でも掘削断面積が大きくなってしまう一次インバートの施工を安全に実施することができ、早期にトンネル断面の閉合が完了し、工期短縮が可能となる。
【0039】
さて、ステップS103で、差分データが第2閾値以下であるともの判定されると、次にステップS104に進む。ステップS104では、差分データが第1閾値以下であるか否かが判定される。ここで、差分データが第1閾値より大きく、かつ、第2閾値以下である場合には、有る程度の変状が把握された場合であるので、ステップS106に進み、報知レベルが第2報知処理より低い、第1報知処理が実行される。この第1報知処理としては、第2報知処理で使用するものとは色違いの回転灯などの報知手段400を自動、もしくは手動でオンすることである。バックホウ周辺の作業員は、このような報知手段400の動作に応じて、少なからず危険性が生じていることを認知することが可能となる。また、例えば、パーソナルコンピューター300の表示手段370において、鏡吹付けコンクリートなどの対策工の要求を行う表示を行い、オペレーターに対して必要とする処置を促すようにすることができる。
【0040】
ステップS105では、所定時間が経過した場合にステップS101に戻り、再びそれぞれの鏡部の各点のデータを取得する処理が実行される。
【0041】
なお、図4に示すフローでは、「差分データ」という概念を使って、変状の判定を行うようにしたが、これによらず、その他の方法で変状の判定を行うようにしてもよい。また、鏡部で取得した点のいずれかが、閾値を越えた場合に報知処理を実行するようにもできるし、鏡部で取得した全ての点の挙動を総合的に勘案して、報知処理を実行するようにもできる。
【0042】
また、図4に示すフローでは、第1閾値や第2閾値などの閾値は、手動で設定されることが望ましい。閾値は、現場の状況を把握した経験のある人によって設定した方が、よりきめの細かい対応が可能となるからである。というのは、掘削区分(地山のよしあしに係る区分)が同じ地山であっても、掘削状況や掘削地点などによって状況が変わってくるからである。
【0043】
また、図4に示すフローでは、第1報知処理としてオペレーターに対する吹付け要求などを、また、第2報知処理として回転灯による作業員に対する待避要求を、例にとって説明したが、報知処理の具体例はこれらに限定されるものではない。
【0044】
また、図4に示すフローでは、報知処理における報知レベルが2段階に設定されているが、より細かいレベルで報知処理を行うようにしてもよいし、また報知レベルを1段階だけに限定することもできる。
【0045】
次に、本実施形態に係るトンネル施工管理システムの第2の目的を実行するための第2解析処理について説明する。第1の目的は、これまで説明してきたように、切羽10近傍における地山の挙動を把握し、変状が大きくなったときに報知処理を行うことであったが、第2の目的は一次インバート施工部30における出来形を管理することにある。このような管理を行うために、本実施形態では第2解析処理として定義するものが実行される。
【0046】
図8は本発明の実施の形態に係るトンネル施工管理システムにおける第2解析処理の処理フローを示す図である。第1解析処理の処理フローは一次インバート施工を行っているときに常時実行するものであったが、第2解析処理の処理フローは、オペレーターがパーソナルコンピューター300に対して、実行指示などを入力することで実行が開始されるものである。
【0047】
図8において、ステップS300で第2解析処理のフローが開始されると、続いて、ステップS301に進み、幅員データ取得処理が実行される。図9に基づいて、この幅員データ取得処理について説明する。図9は、一次インバート施工部30における所定のトンネル断面を示しており、幅員データ取得処理では、この一次インバート施工部30における所定の断面の幅員にわたる数点の座標データを取得する。図9に示す例では、座標データ取得手段110によって、一次インバート施工部30におけるD1乃至D10の10点に
係る掘削中のインバート盤16の位置座標データを取得するようにしている。すなわち、ステップS301では、トータルステーション100による幅員のスキャンによって、このようなD1乃至D10の10点に係る掘削中のインバート盤16の位置座標データを取得
するようにしている。
【0048】
続くステップS302においては、ステップS301で取得したデータを、データ記憶手段350に記憶する処理を実行する。次のステップS303では、前記所定の断面に係る底盤形状の設計データを設計データ記憶手段360から取得する。
【0049】
ステップS304においては、データ記憶手段350に記憶されている実測の幅員データと、設計データ記憶手段360から取得された設計データとを重ね合わせる処理を実行する。このような重ね合わせ処理を実行することで、実測の幅員データと設計データとがどの程度乖離しているかを把握することが可能となる。なお、2つのデータの乖離を計るためには種々の方法があるが、本実施形態に係るトンネル施工管理システムの従来周知のものを適宜用いることができる。
【0050】
ステップS305では、上記の乖離が所定以内であるかが判定される。ステップS305で乖離が所定内であれば、ステップS306に進み、完了判定を下し、乖離が所定を越えていれば、ステップS307に進み、未完了判定を下す。
【0051】
ステップS308においては、パーソナルコンピューター300の表示手段370において、幅員データと設計データの重ね合わせ画像、判定結果を表示する処理を実行する。図10にはこのような表示処理に基づく表示例を示す。ステップS309で処理を終了する。
【0052】
以上のような、本実施形態に係るトンネル施工管理システムの第2解析処理によれば、簡便に一次インバート施工部30における出来形管理を行うことが可能となり、現場での作業効率がアップする。
【0053】
次に、本発明の他の実施形態について説明する。図11は本発明の他の実施の形態に係るトンネル施工管理システムが適用されたトンネル掘削工事現場の概略を示す図であり、図12は本発明の他の実施の形態に係るトンネル施工管理システムのシステム構成例を示す図である。
【0054】
先の実施形態においては、1台のトータルステーション100を用いて第1解析処理、及び第2解析処理を実行するようにしていたが、他の実施形態においては、図11に示すように鏡データを取得するために用いるトータルステーション100と、幅員をスキャンするときに用いるトータルステーション200とを別々に設けるようにしている。この実施形態では、トータルステーション100は天井部に取り付け、トータルステーション200は先の実施形態と同様にトンネル内壁面に取り付けるようにしている。或いは、トータルステーション200については、三脚(不図示)を利用して用いることもできる。
【0055】
鏡データを取得するために用いるトータルステーション100は、切羽10から100
m〜150m程度離れていても、鏡の位置座標を取得することができる。したがって、トータルステーション100は一度設置すると、トンネル掘削が100m程度進行したとしても、切羽10に近づけるように設置し直す必要がない。このような実施形態によっても先の実施形態と同様の作用効果を享受することができる。
【0056】
以上、本発明のトンネル施工管理システムによれば、短いベンチでトンネル断面を上半部と下半部に分割して掘削を行う補助ベンチ付き全断面工法における上半鏡11の複数点の座標データ、及び、前記工法におけるベンチ部の下半鏡21の複数点の座標データ、及び、前記ベンチ部20と連続する下半部の下半盤15から下方に掘削されることによって形成される一次インバート施工部30におけるインバート鏡31の複数点の座標データを取得しこれらの経時変化を解析することで、現場で地山の挙動を把握することが可能となるので、強度が弱い地山の切羽10に近いところ(例えば、10m以内の地点)でも掘削断面積が大きくなってしまう一次インバートの施工を安全に実施することができ、また一次インバート施工部30にける掘削中のインバート盤16の幅方向の複数点の座標データを掘削中に任意のタイミングで適宜取得し、前記一次インバート施工部30の底盤形状の設計データと比較解析することでインバート盤16の過度な掘削、あるいは掘削不足を防止するなどの出来形管理を実施し、インバートストラット、吹付けコンクリート32などの支保構造体を適切に配することで、早期にトンネル断面の閉合が完了し、工期短縮が可能となる。
【符号の説明】
【0057】
5・・・鋼製支保工、吹付けコンクリート
6・・・ロックボルト
10・・・切羽
11・・・上半鏡
12・・・鏡吹付けコンクリート
13・・・鏡ボルト
14・・・上半盤
15・・・下半盤
16・・・インバート盤
20・・・ベンチ部
21・・・下半鏡
30・・・一次インバート施工部
31・・・インバート鏡
32・・・インバートストラット、吹付けコンクリート
40・・・インバート施工部
41・・・インバートコンクリート
100・・・トータルステーション
110・・・座標データ取得手段
120・・・計時データ取得手段
200・・・トータルステーション
210・・・座標データ取得手段
220・・・計時データ取得手段
300・・・パーソナルコンピューター
310・・・データ処理手段
350・・・データ記憶手段
360・・・設計データ記憶手段
370・・・表示手段
400・・・報知手段
【特許請求の範囲】
【請求項1】
所定の水平角、鉛直角に存在する対象点まで距離データを取得し、当該対象点の位置座標を取得する座標データ取得手段と、
時刻を計時し、前記座標データ取得手段で座標データを取得した時刻に係る計時データを取得する計時データ取得手段と、
前記座標データ取得手段及び前記計時データ取得手段によって取得された座標データ及び計時データを対応付けて記憶するデータ記憶手段と、
前記データ記憶手段に記憶されるデータに基づいて、データ処理を行うデータ処理手段と、を有するトンネル施工管理システムであって、
短いベンチでトンネル断面を上半部と下半部に分割して掘削を行う補助ベンチ付き全断面工法における上半鏡の複数点の座標データ、及び、前記工法におけるベンチ部の端部垂直面となる下半鏡の複数点の座標データ、及び、前記ベンチ部と連続する下半部の下半盤から下方に掘削されることによって形成される一次インバート施工部におけるインバート鏡の複数点の座標データを、前記座標データ取得手段によって取得する鏡データ取得手段と、
前記鏡データ取得手段によるデータ取得を所定の時間間隔で実行させ、取得した座標データを計時データと共に前記データ記憶手段に記憶させる定期スキャン手段と、
前記定期スキャン手段に基づいて取得され、前記データ記憶手段に記憶されるデータを前記データ処理手段によって解析する第1解析手段と、を有することを特徴とするトンネル施工管理システム。
【請求項2】
前記第1解析手段による解析結果に基づいて報知を行う報知手段を有することを特徴とする請求項1に記載のトンネル施工管理システム。
【請求項3】
前記報知手段が回転灯又はサイレンであることを特徴とする請求項2に記載のトンネル施工管理システム。
【請求項4】
前記一次インバート施工部における掘削中のインバート盤の幅方向の複数点の座標データを、前記座標データ取得手段によって掘削中に任意のタイミングで適宜取得できる幅員データ取得手段と、
前記幅員データ取得手段によるデータ取得を実行させ、取得した座標データを前記データ記憶手段に記憶させる幅員スキャン手段と、
前記一次インバート施工部の底盤形状の設計データを記憶する設計データ記憶手段と、
前記幅員スキャン手段に基づいて取得され前記データ記憶手段に記憶されるデータと、
前記設計データ記憶手段に記憶されるデータと、を前記データ処理手段によって解析する第2解析手段と、を有することを特徴とする請求項1乃至請求項3のいずれかに記載のトンネル施工管理システム。
【請求項5】
前記鏡データ取得手段における座標データ取得に用いるトータルステーションと、前記幅員スキャン手段における座標データ取得に用いるトータルステーションと、が異なることを特徴とする請求項1乃至請求項4のいずれかに記載のトンネル施工管理システム。
【請求項1】
所定の水平角、鉛直角に存在する対象点まで距離データを取得し、当該対象点の位置座標を取得する座標データ取得手段と、
時刻を計時し、前記座標データ取得手段で座標データを取得した時刻に係る計時データを取得する計時データ取得手段と、
前記座標データ取得手段及び前記計時データ取得手段によって取得された座標データ及び計時データを対応付けて記憶するデータ記憶手段と、
前記データ記憶手段に記憶されるデータに基づいて、データ処理を行うデータ処理手段と、を有するトンネル施工管理システムであって、
短いベンチでトンネル断面を上半部と下半部に分割して掘削を行う補助ベンチ付き全断面工法における上半鏡の複数点の座標データ、及び、前記工法におけるベンチ部の端部垂直面となる下半鏡の複数点の座標データ、及び、前記ベンチ部と連続する下半部の下半盤から下方に掘削されることによって形成される一次インバート施工部におけるインバート鏡の複数点の座標データを、前記座標データ取得手段によって取得する鏡データ取得手段と、
前記鏡データ取得手段によるデータ取得を所定の時間間隔で実行させ、取得した座標データを計時データと共に前記データ記憶手段に記憶させる定期スキャン手段と、
前記定期スキャン手段に基づいて取得され、前記データ記憶手段に記憶されるデータを前記データ処理手段によって解析する第1解析手段と、を有することを特徴とするトンネル施工管理システム。
【請求項2】
前記第1解析手段による解析結果に基づいて報知を行う報知手段を有することを特徴とする請求項1に記載のトンネル施工管理システム。
【請求項3】
前記報知手段が回転灯又はサイレンであることを特徴とする請求項2に記載のトンネル施工管理システム。
【請求項4】
前記一次インバート施工部における掘削中のインバート盤の幅方向の複数点の座標データを、前記座標データ取得手段によって掘削中に任意のタイミングで適宜取得できる幅員データ取得手段と、
前記幅員データ取得手段によるデータ取得を実行させ、取得した座標データを前記データ記憶手段に記憶させる幅員スキャン手段と、
前記一次インバート施工部の底盤形状の設計データを記憶する設計データ記憶手段と、
前記幅員スキャン手段に基づいて取得され前記データ記憶手段に記憶されるデータと、
前記設計データ記憶手段に記憶されるデータと、を前記データ処理手段によって解析する第2解析手段と、を有することを特徴とする請求項1乃至請求項3のいずれかに記載のトンネル施工管理システム。
【請求項5】
前記鏡データ取得手段における座標データ取得に用いるトータルステーションと、前記幅員スキャン手段における座標データ取得に用いるトータルステーションと、が異なることを特徴とする請求項1乃至請求項4のいずれかに記載のトンネル施工管理システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】

【図12】

【図13】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−31594(P2012−31594A)
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願番号】特願2010−170231(P2010−170231)
【出願日】平成22年7月29日(2010.7.29)
【出願人】(000195971)西松建設株式会社 (329)
【出願人】(599098127)株式会社ソーキ (28)
【Fターム(参考)】
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願日】平成22年7月29日(2010.7.29)
【出願人】(000195971)西松建設株式会社 (329)
【出願人】(599098127)株式会社ソーキ (28)
【Fターム(参考)】
[ Back to top ]