
トールボット干渉を用いた撮像装置および撮像装置の調整方法
【課題】回折格子と遮蔽格子を有するタルボ干渉法を用いた撮像装置において、回折格子および遮蔽格子の姿勢のずれによるキャリア周波数に対応するスペクトル強度の低下を軽減する。
【解決手段】撮像装置はX線源110とX線源110から出射したX線を回折する回折格子130と回折格子130によって回折されたX線の一部を遮る遮蔽格子150と遮蔽格子150を経たX線の強度分布を検出する検出器170とを有する。更に、撮像装置は、調整部190を有する。調整部190は、検出器170で検出された強度分布を複数の領域に分割し、複数の領域の強度分布に基づいて、回折格子130および遮蔽格子150のうち少なくともいずれか一方の姿勢を調整する。
【解決手段】撮像装置はX線源110とX線源110から出射したX線を回折する回折格子130と回折格子130によって回折されたX線の一部を遮る遮蔽格子150と遮蔽格子150を経たX線の強度分布を検出する検出器170とを有する。更に、撮像装置は、調整部190を有する。調整部190は、検出器170で検出された強度分布を複数の領域に分割し、複数の領域の強度分布に基づいて、回折格子130および遮蔽格子150のうち少なくともいずれか一方の姿勢を調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、トールボット干渉を用いた撮像装置および撮像装置の調整方法に関する。
【背景技術】
【0002】
トールボット干渉法は光やX線を含む様々な波長の電磁波の干渉を用いて被検体の形状や組成を計測する方法であり、一般に、電磁波源、回折格子、検出器を備える撮像装置が用いられる。トールボット干渉法の原理について簡単に説明する。まず、電磁波源から位相波面の揃った、つまりコヒーレントな入射波を被検体に対し照射する。被検体を透過した電磁波は被検体の形状や組成によって波面が変化する。この波面変化が起きた電磁波が回折格子によって回折されると、回折格子からトールボット距離と呼ばれる特定の距離はなれた位置に干渉パターンが形成される。この干渉パターンを検出器によって検出し、解析することによって被検体によって変化した位相波面(以下、位相像と呼ぶ。)またはその位相波面の微分像(以下、微分位相像と呼ぶ。)を得ることができる。
【0003】
また特許文献1に記載されているように、電磁波を透過させる透過部と遮蔽する遮蔽部が周期的に配置された遮蔽格子を、干渉パターンが生じる位置に配置することでモアレを形成し、このモアレを検出し、解析して被検体の位相像や微分位相像を得る方法もある。この方法を用いると、干渉パターンの周期よりも空間分解能が大きい検出器を用いることができるため、電磁波としてX線を用いるトールボット干渉法(以下、X線トールボット干渉法と呼ぶ。)を用いた撮像装置に良く用いられる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−164373号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
遮蔽格子を用いてモアレを形成し、そのモアレの強度分布を検出するトールボット干渉計においては、用いる電磁波の波長や、回折格子や遮蔽格子のピッチによって撮像に適した回折格子や遮蔽格子の姿勢が決まる。回折格子や遮蔽格子の姿勢が撮像に適した姿勢からずれると、得られる被検体の位相像や微分位相像に対するノイズ比が増加するといった画質の低下につながる可能性がある。そこで本発明は、回折格子や遮蔽格子の姿勢を撮像に適した姿勢に調整することによって、より高画質な位相像や微分位相像を得ることができる撮像装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するために、本発明の一側面としての撮像装置は、電磁波源と、電磁波源から出射した電磁波を回折する回折格子と、回折格子によって回折された電磁波の一部を遮る遮蔽格子と、遮蔽格子を経た電磁波の強度分布を検出する検出器と、検出器の検出結果に基づいて回折格子および遮蔽格子のうち少なくともいずれか一方の姿勢を調整する調整部と、を有し、調整部は、
検出器で検出された強度分布を複数の領域に分割し、複数の領域の強度分布に基づいて、
回折格子および遮蔽格子のうち少なくともいずれか一方の姿勢を調整することを特徴とする。
【0007】
本発明のその他の側面については、以下で説明する実施の形態で明らかにする。
【発明の効果】
【0008】
本発明によれば、回折格子及び遮蔽格子のうち少なくともいずれか1つの姿勢を調整することによって、より高画質な位相像や微分位相像を得ることができる撮像装置を提供することが可能である。
【図面の簡単な説明】
【0009】
【図1】本発明の実施形態に係るX線撮像装置を説明する図である。
【図2】本発明の実施形態に係る2次元回折格子を説明する図である。
【図3】本発明の実施形態に係る2次元遮蔽格子を説明する図である。
【図4】本発明の実施形態に係る調整部における調整フローを説明する図である。
【図5】本発明の実施形態に係るモアレの強度分布の領域分割方法を表している図である。
【図6】本発明の実施形態に係る空間周波数スペクトルとキャリア周波数に対応したスペクトルを説明する図である。
【図7】本発明の実施形態に係るキャリア周波数に対応したスペクトル強度分布を説明する図である。
【図8】回折格子や遮蔽格子の光軸に対する傾きとCNRの変化を説明する図である。
【図9】本発明の実施形態に係るビジビリティ分布を説明する図である。
【図10】回折格子や遮蔽格子の光軸に対する傾きとビジビリティ値の変化を説明する図である。
【発明を実施するための形態】
【0010】
以下に、本発明の好ましい実施形態を添付の図面に基づいて詳細に説明する。なお、各図において、同一の部材については同一の参照番号を付し、重複する説明は省略する。
【0011】
以下にX線トールボット干渉法を用いたX線撮像装置を例にとり、実施形態1と2の説明をする。実施形態1と実施形態2の撮像装置は、検出器により検出した強度分布(モアレ)を複数の領域に分割し、その領域毎の強度分布に基づいて回折格子又は遮蔽格子の少なくともいずれか一方の姿勢を調整する。より具体的に説明をすると、まず、分割した領域毎にフーリエ変換を行い、キャリア周波数に対応したスペクトルの強度情報を得る。次に、領域毎のキャリア周波数に対応したスペクトルの強度情報に基づいて回折格子又は遮蔽格子の少なくともいずれか一方の姿勢を調整する。
【0012】
より具体的な実施形態については以下に説明をする。
【0013】
(実施形態1)
本実施形態では、分割した複数の領域毎にキャリア周波数に対応したスペクトルのピーク強度とそのスペクトルの周囲のバックグラウンドノイズの強度との比であるCarrier to Noise Ratio(以下、CNRと呼ぶ。)を算出し、算出したCNRの値に基づいて回折格子又は遮蔽格子の少なくともいずれか一方の姿勢を調整する。
【0014】
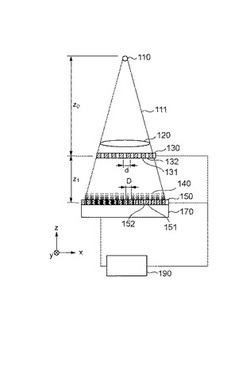
本実施形態の構成の一例を図1に示す。図1に示したX線撮像装置はX線源110と、X線源からのX線を回折する回折格子130と、回折格子130によって回折されたX線の一部を遮蔽する遮蔽格子150と、遮蔽格子を経たX線を検出する検出器170を備えている。更に、回折格子130と遮蔽格子150の姿勢を調整する調整部190も備えている。この撮像装置は、被検体120の位相情報をモアレとして撮像する。以下で各構成について説明をする。
【0015】
(X線源)
本実施形態の撮像装置は電磁波源としてX線源を備えている。X線源110から発生したX線111が被検体120を透過すると、被検体120の組成や形状に応じてX線111に位相の変化及び吸収が生じる。
【0016】
X線源としては、連続X線を発生させるX線源を用いても、特性X線を発生させるX線源を用いても良い。また、波長としては、0.1Å以上5Å以下のものから適宜選択される。また、X線源110から出射したX線の経路上に、波長選択フィルタやX線を細いビームに分割するための線源用の格子を適宜設けても良い。
【0017】
(回折格子)
回折格子130は位相進行部131と位相遅延部132が周期的に配置された位相格子である。回折格子として、遮蔽部と透過部が周期的に配置された遮蔽格子を用いることもできるが、位相格子を用いた方がX線量を確保できる点で有利である。回折格子130は、X線111を回折することで、明部と暗部を有する干渉パターン140を形成する。尚、本明細書ではX線(電磁波)の強度が高いところを明部、低いところを暗部と言う。
【0018】
図1では回折格子130は、被検体120と遮蔽格子150の間に配置されているが、X線源と被検体の間に配置しても良い。回折格子130を被検体120と遮蔽格子150の間に配置すると、被検体により位相波面が変化したX線が回折されることで被検体の位相情報を持った干渉パターンが形成される。一方、X線源と被検体の間に回折格子を配置すると、回折格子によって回折されたX線の位相波面が被検体により変化することで被検体の位相情報を持った干渉パターンが形成される。
【0019】
位相進行部131と位相遅延部132は、透過したX線に対して位相差がつくように形成されていれば良い。一般的には、位相遅延部132を透過したX線と、位相進行部131を透過したX線の位相差がπ、またはπ/2である。前者をπ回折格子、後者をπ/2回折格子と称する場合もある。但し、位相遅延部132を透過したX線と、位相進行部131を透過したX線の位相差は、πやπ/2でなくても、X線を回折する領域内で一定であれば良く、例えば透過したX線の位相差がπ/3でも良い。
【0020】
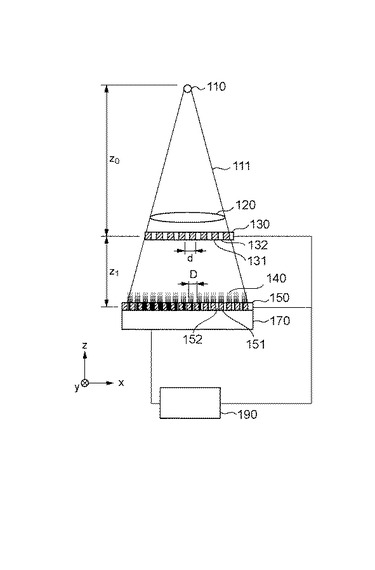
位相進行部131と位相遅延部132は1次元周期を持つように配置されていても良いし、2次元周期を持つように配置されていても良い。位相進行部131と位相遅延部132が2次元周期を持つように配置されている回折格子の例として、図2(A)に示すように位相進行部131aと位相遅延部132aが市松格子状に配置されている回折格子が挙げられる。他にも、図2(B)に示すような位相進行部131bと位相遅延部132bが井桁格子状に配置されているものも挙げられる。しかし、位相進行部131と位相遅延部132の配置方法や形状はこれらに限定されるものではなく、例えば位相進行部や位相遅延部の外縁が円形状であっても回折格子として利用することが可能である。
【0021】
回折格子130が1次元の周期を有する場合には、被検体120の1次元方向の位相勾配情報しか取得できない。しかし、回折格子130が2次元の周期を有する場合には、2次元方向の位相勾配情報を取得することができるため、より正確に被検体の位相情報を得ることができる。
【0022】
なお、回折格子130を構成する材料はX線を透過する物質であることが好ましく、例えば、シリコン等を用いることができる。
【0023】
X線が回折格子130に回折されることで形成される干渉パターンは、X線源110と回折格子130との距離をZ0とすると、回折格子130からの距離Z1が下記の式(1)を満たしている位置に最も明瞭に現れる。
【0024】
式(1)において、λはX線の波長、dは回折格子130の格子周期である。
【0025】
【数1】

【0026】
Nは回折格子の形態により異なる値であり、以下のように表現できる実数である。なお、nは自然数である。
1次元配列のπ回折格子:N=n/4−1/8
1次元配列のπ/2回折格子:N=n−1/2
2次元配列の市松模様π回折格子:N=n/4−1/8
2次元で市松模様π/2回折格子:N=n/2−1/4
【0027】
(遮蔽格子)
遮蔽格子150は、周期的に配置された透過部151と遮蔽部152を有し、
干渉パターン140の明部を形成するX線の一部を遮蔽することでモアレを形成する。そのため、回折格子130から距離Z1だけ離れた位置に設けられることが好ましいが、製造誤差程度であれば遮蔽格子の配置位置がずれていてもモアレを形成することができる。(図1では説明の都合上、干渉パターン140と遮蔽格子150を離して記載している。)
なお、遮蔽部152と透過部151は干渉パターン140が形成される位置に遮蔽格子が配置された時にモアレが生じる程度にX線を遮蔽または透過すれば良く、X線を完全に遮蔽または透過しなくても良い。透過部151は貫通孔でも良いが、例えばシリコンのようなX線を透過する物質で構成されていても良い。一方、遮蔽部152を構成する材料として、例えば、金を用いることができる。
【0028】
遮蔽格子150の周期は、干渉パターンと同一、または僅かに異なる。干渉パターンと同一の周期を持つ遮蔽格子を用いた場合、干渉パターンに対して遮蔽格子を面内回転させることによってモアレが発生する。干渉パターンの周期をD、干渉パターンの明暗の周期方向と遮蔽格子の周期方向のなす角をθ(ただし、θ<<1ラジアン)とすれば、モアレの周期Dmは、D/θとなる。
【0029】
一方、干渉パターンと僅かに異なる周期を持つ遮蔽格子を用いた場合、遮蔽格子の面内回転を行なうことなくモアレが発生する。遮蔽格子の周期をDa=D+δ(ただしδ<<D)とすれば、モアレの周期Dmは、D2/δとなる。
【0030】
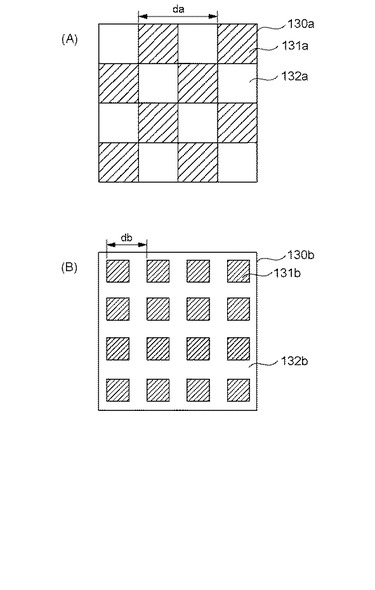
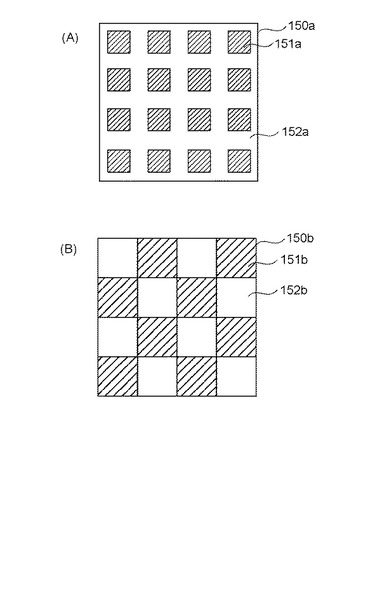
遮蔽格子150において、透過部151と遮蔽部152は、1次元周期的に配列されていてもよいし、また2次元周期的に配列されていてもよい。
【0031】
例えば、図2(A)に示した市松格子状の回折格子であって、π回折格子を用いた場合には、図3(A)のように透過部151aと遮蔽部152aが2次元的に配列されている井桁格子状の遮蔽格子150aを用いることができる。また、図2(A)に示した市松格子状のπ/2回折格子を用いた場合には、図3(B)のように透過部151bと遮蔽部152bが2次元的に配列されている市松格子状の遮蔽格子150bを用いることができる。
なお、上記の組合せは一例であり、回折格子と遮蔽格子は種々の組合せが可能である。
【0032】
(検出器)
前記遮蔽格子150を透過したX線の干渉パターンの情報はモアレの強度分布として、X線検出器170によって検出される。X線検出器170は、X線のモアレを撮像することのできる撮像素子である。検出器として、例えば、デジタル信号への変換が可能なFPD(Flat Panel Detector)等を用いることができる。
【0033】
(調整部)
調整部190は、検出器により検出されたモアレの強度分布を複数の領域に分割し、各々の領域毎にキャリア周波数に対応したスペクトル強度情報を算出し、その強度情報の分布に基づいて回折格子と遮蔽格子の姿勢を調整する。但し、本明細書におけるキャリア周波数とは、モアレの基本周期成分の周波数のことを指す。
【0034】
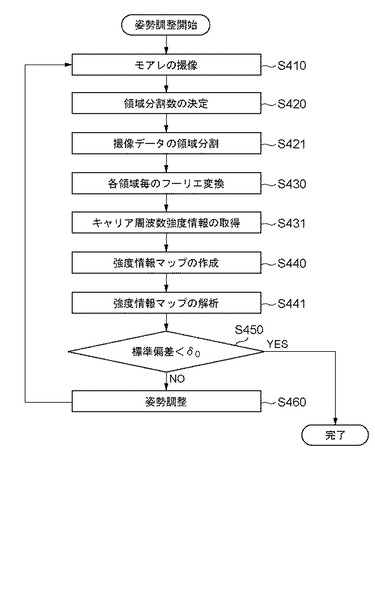
調整部が行う回折格子と遮蔽格子の姿勢の調整方法について、図4に従って説明する。
【0035】
ステップS410では、モアレを撮像することによってモアレの強度分布が検出器上の画素毎の強度データとして取得される。
【0036】
次に、ステップS420で領域分割数を決定する。領域分割数は、格子の調整精度や、キャリア周波数に対応したスペクトル強度情報の分布状況などによって決定される。但し、キャリア周波数に対応したスペクトル強度情報の分布状況を考慮せずに、格子の調整精度などから予め領域分割数を決定しておき、姿勢調整時には常に決められた数の領域分割数を採っても良い。その場合、ステップS420は不要である。
【0037】
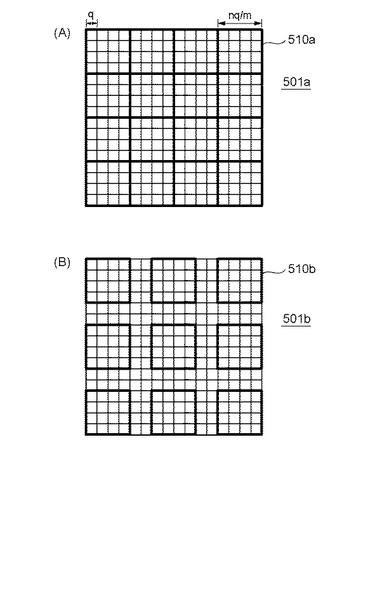
ステップS421では、ステップS420で決定された領域分割数に応じて図5のように領域を分割する。図5(A)では線で囲まれた正方形の1つ1つが検出器の画素を、太線で囲まれた正方形の1つ1つが分割された領域を示しており、モアレの撮像範囲の全領域501a内で、分割された領域510a同士がたがいに接している。この場合、各々の領域の一辺は、検出器の画素ピッチをq、縦方向および横方向の画素数をn、縦方向及び横方向の分割数をmとすると、nq/mで表される。ここでm、およびnは整数である。分割方法はこの限りではなく、例えば、図5(B)に示したように、モアレの撮像範囲の全領域501b内で、分割された領域510bが互いに接していなくても良い。尚、図5(B)のように撮像範囲を分割すると、どの領域にも含まれない画素が存在する。
【0038】
次に、ステップS430とS431によって、ステップS421で分割された領域毎にキャリア周波数に対応したスペクトルの強度情報を取得する。
【0039】
ステップS430では、分割された領域毎にフーリエ変換を行う。
【0040】
干渉パターンが形成される際には多数の回折光が重なって干渉するため、キャリア周波数と数多くのその高調波成分を含んでいる。しかし、モアレは干渉パターンのキャリア周波数成分を空間的に拡大した形状を持つので、x軸を周期方向とする1次元の回折格子を使用した場合にモアレは(2)式で表すことができる。
g(x,y)=a(x,y)+b(x,y)cos(2πf0x+φ(x,y))…(2)
ここで、a(x,y)はバックグラウンドを表し、b(x,y)はモアレのキャリア周波数成分の振幅を表す。また、f0はモアレのキャリア周波数を表し、φ(x,y)はキャリア周波数成分の位相を表している。(2)式は、モアレが、バックグラウンドの第1項と、周期性を持った第2項との和で表されることを示している。
【0041】
また、2次元の回折格子を使用した場合のモアレは、(2)式にy方向のキャリア周波数成分が重畳した形状となる。
【0042】
回折格子130として市松状のπ/2回折格子を用いた場合、キャリア周波数成分は、0次回折光と+1次回折光の干渉、および0次回折光と−1次回折光の干渉によって生じる。また、回折格子130として市松状のπ回折格子を用いた場合は+1次回折光と−1次回折光の干渉によってキャリア周波数成分が生じる。
【0043】
0次回折光と1次回折光は回折格子130で互いにNdだけ離れた位置にある光線が重なり、+1次回折光と−1次回折光は回折格子130で互いに2Ndだけ離れた位置にある光線が重なる。すなわち、これらの干渉はπ/2回折格子の場合はシア量sがNd、π回折格子の場合はシア量sが2Ndのシアリング干渉である。
【0044】
ところで、(2)式は
g(x,y)=a(x,y)+c(x,y)exp(2πif0x)+c*(x,y)exp(−2πif0x)…(3)
と書き表すことができる。ここで
c(x,y)=1/2b(x,y)exp[iφ(x,y)]…(4)である。
【0045】
したがって、干渉縞からc(x,y)の成分またはc*(x,y)の成分を取り出すことにより、位相φ(x,y)の情報を得ることも可能である。
【0046】
ここで、フーリエ変換によって(4)式は
G(fx,fy)=A(fx,fy)+C(fx−f0,fy)+C*(fx+f0,fy)…(5)となる。
【0047】
ここでG(fx,fy)、A(fx,fy)、C(fx,fy)はそれぞれg(x,y)、a(x,y)、c(x,y)に対する2次元のフーリエ変換である。
【0048】
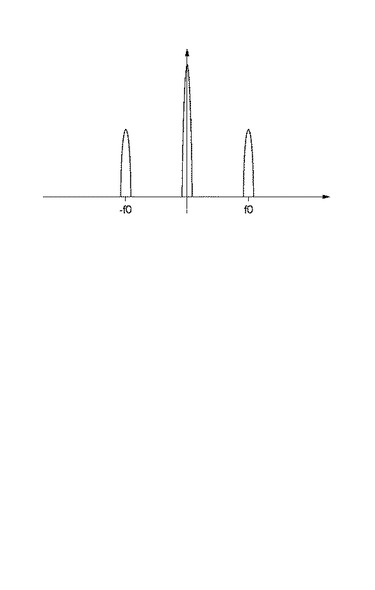
図6は、1次元周期を持つ格子を使用した場合に検出したモアレの強度分布をフーリエ変換して得られる空間周波数スペクトルである。通常、図6のように3つのスペクトルが生じる。中央のスペクトルは主としてA(fx,fy)に由来するスペクトルである。一方、その両脇のスペクトルはそれぞれC(fx,fy)とC*(fx,fy)に由来するキャリア周波数に対応するスペクトルであり、これらのスペクトルのピークは±f0の位置に生じる。
【0049】
ステップS431でキャリア周波数に対応するスペクトルの強度情報を得る。本実施形態では、キャリア周波数に対応するスペクトルの強度情報として、CNRを用いる。CNRは、キャリア周波数に対応したスペクトルのピーク強度とそのスペクトルの周囲のバックグラウンドノイズの強度との比である。CNRの計算には、ステップS420で分割した各々の領域の、キャリア周波数に対応するスペクトルのピーク強度とバックグラウンドノイズの強度を用いる。本実施形態では、キャリア周波数に対応するスペクトルの強度情報として、CNRを用いて回折格子又は遮蔽格子の姿勢を調整するが、他の値を用いて回折格子又は遮蔽格子の調整を行っても良い。キャリア周波数に対応するスペクトルの強度情報として、例えば、スペクトルのピーク強度又はスペクトルの積分強度を用いて良い。スペクトルのピーク強度は、C(fx,fy)またはC*(fx,fy)の絶対値|C(fx,fy)|、および|C*(fx,fy)|であり、スペクトルの積分強度は、積分値∬C(fx,fy)dxdy、および∬C*(fx,fy)dxdyである。また、キャリア周波数に対応するスペクトルの強度情報とは、キャリア周波数に対応するスペクトル(C(fx,fy)またはC*(fx,fy))の強度に関する情報のことであり、ビジビリティも含む。ビジビリティについては実施形態2で説明をする。
【0050】
キャリア周波数に対応するスペクトルの強度情報としてCNRを用いると、CNRに基づいて回折格子や遮蔽格子の姿勢を調整することになる。すると、分割した各々の領域におけるバックグラウンドノイズの強度に領域間で差があっても、撮像範囲全体でCNRを一定の範囲内にすることができる。すると結果として、得られる被検体の位相像あるいは微分位相像の画質の不均一さを軽減することができる。つまり、位相像あるいは微分位相像が、特定の領域だけノイズが高いといったことを防ぐことができる。バックグラウンドノイズの強度が領域間で異なる原因として、例えば製造誤差により回折格子又は遮蔽格子の周期が特定の領域で異なることが挙げられる。
【0051】
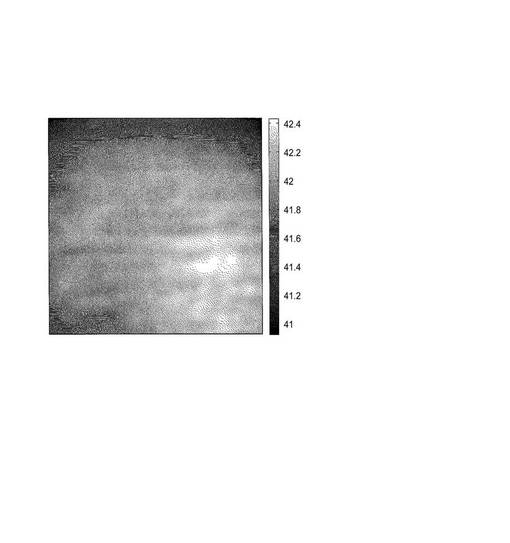
次のステップS440では、ステップS430で得たキャリア周波数に対応したスペクトルの強度情報からスペクトルの強度分布を得る。このスペクトル強度分布は、ステップS421で分割された領域を1単位として作成する。つまり、本実施形態ではステップS431で算出したCNRからCNRの分布を得る。図7は、スペクトル強度分布の一例であり、ステップS431で領域毎に算出したCNRの値を2次元マッピングしたものである。但し、ステップS440で得るスペクトルの強度分布は実際には図7の様なマップでなくても良い。複数の領域についてキャリア周波数に対応するスペクトルの強度情報(本実施形態ではCNR)が分かる情報のことを本明細書ではスペクトルの強度分布と呼ぶ。
【0052】
ステップS441では、ステップS440で得られたスペクトル強度分布を検出器画素の縦横方向に対して解析し、スペクトル強度分布のばらつきを標準偏差により評価する。
【0053】
次にステップS450で、ステップS441で得られた標準偏差がしきい値δ0以上の値であるかを判断する。得られた標準偏差がδ0よりも小さければそのまま回折格子と遮蔽格子の姿勢調整を行わず、δ0以上であれば以下に説明する回折格子と遮蔽格子の姿勢の調整を行う。
【0054】
但し、ステップS441とS450では標準偏差によりスペクトル強度分布のばらつきを評価し、回折格子と遮蔽格子の姿勢の調整を行うか否かを決定しているが、標準偏差以外の値で調整を行うか否かを決定しても本発明の効果を得ることができる。例えばスペクトル強度情報の最大値と最小値の差の絶対値で調整を行うか否かを決定しても良い。
【0055】
ステップS460では、スペクトル強度分布においてキャリア周波数に対応するスペクトルの強度情報の値が小さい領域の値が、最大値の値に近づくように、回折格子および遮蔽格子の姿勢を調整する。
【0056】
回折格子と遮蔽格子の姿勢の調整について説明をする。
【0057】
本実施形態の撮像装置は、回折格子と遮蔽格子の姿勢の調整により、光軸に対する回折格子と遮蔽格子の傾きと、干渉パターンに対する遮蔽格子の面内角度を調整する。
【0058】
まず、光軸に対する回折格子と遮蔽格子の傾きの調整について説明をする。
【0059】
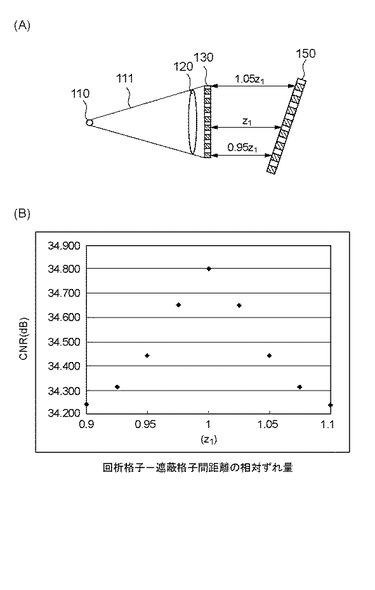
図8(A)はX線トールボット干渉法に用いられる撮像装置の構成例であり、光軸に対して遮蔽格子が傾いており、回折格子と遮蔽格子間の距離(以下、格子間距離と呼ぶ。)が上方で大きく、下方で小さくなっている。但し、本明細書における、光軸に対する傾きとは、光軸に対するチルトであり、回折格子や遮蔽格子が光軸に対して、どの程度傾いているかのアオリ角のことをいう。回折格子と遮蔽格子の中心間の距離は式(1)のz1であり、上方のある一点での格子間距離は1.05z1、下方のある一点での格子間距離は0.95z1である。
【0060】
図8(B)は格子間の距離の変化によるCNRの変化を示したグラフである。横軸は式(1)のz1を1とした時の格子間距離を示しており、縦軸はCNRの値を示している。このグラフより、格子間距離が理想的な距離(z1)から5%ずれることによって、CNRが0.35dB下がることがわかる。
【0061】
図8(B)のグラフは格子間距離とCNRの関係のみを示しているが、スペクトルのピーク強度やスペクトルの積分強度のような、CNR以外のキャリア周波数に対応するスペクトル強度も格子間距離によって変化する。
【0062】
このように、光軸に対する回折格子と遮蔽格子の傾きにより、キャリア周波数に対応するスペクトルの強度情報が変化するため、回折格子と遮蔽格子の光軸に対する傾きを調整する。
【0063】
回折格子と遮蔽格子の光軸に対する傾きの具体的な調整方法の例について説明をする。まず、ステップS440により取得したスペクトルの強度分布から、最もCNRが大きい領域のCNR値と、そのほかの領域のCNR値の差を夫々計算する。その後、図8(B)のようなグラフを参照して回折格子又は遮蔽格子の光軸に対する傾き調整量を計算し、その計算結果に基づいて回折格子又は遮蔽格子の光軸に対する傾きを調整する。再度ステップS410〜S450を行い、キャリア周波数に対応したスペクトル強度情報の標準偏差がしきい値δ0以下であれば光軸に対する回折格子と遮蔽格子の姿勢の調整を完了する。回折格子と遮蔽格子の両方の傾きを調整しても良い。傾き調整の方向(X線源側に傾けるのか、検出器側に傾けるのか。)が分からない場合は、回折格子又は遮蔽格子を任意の方向に傾けてステップS410〜S431を行い、キャリア周波数に対応するスペクトルの強度情報の変化によって適切な方向を判断すればよい。また、回折格子又は遮蔽格子の光軸に対する傾き調整を一回で行う場合、キャリア周波数に対応したスペクトル強度情報の標準偏差がしきい値δ0以下であるかの確認(ステップS410〜S450)は行わなくてもよい。
【0064】
また、調整方法の別の例として、回折格子又は遮蔽格子の光軸に対する傾き調整量を計算せずに回折格子又は遮蔽格子の光軸に対する傾き調整量を調整する方法がある。
【0065】
この方法では、あらかじめ傾き移動量を決めておき、回折格子又は遮蔽格子の光軸に対する傾きを所定の移動量だけ移動させてから再度ステップS410〜S450を行う。
【0066】
キャリア周波数に対応したスペクトル強度情報の標準偏差がしきい値δ0以下になるまで、所定の量の傾き移動とステップS410〜S460を繰り返すことで、回折格子や遮蔽格子の姿勢を適切な姿勢に近づけることができる。
【0067】
次に干渉パターンに対する遮蔽格子の面内角度の調整について説明をする。干渉パターンに対する遮蔽格子の面内角度は、前述のようにモアレの周期に影響するが、キャリア周波数に対応したスペクトルの強度情報にも影響を与える。干渉パターンと遮蔽格子のピッチによって最適な面内角度があり、その角度からずれるとキャリア周波数に対応したスペクトルの強度情報が小さくなる。そのため、回折格子及び遮蔽格子のうち少なくともいずれか一方の、光軸を中心とする回転を調整することで干渉パターンに対する遮蔽格子の面内角度の調整を行う。具体的な調整方法は、光軸に対する回折格子と遮蔽格子の傾きの調整方法と同様である。
【0068】
回折格子または遮蔽格子の光軸を中心とする回転は、キャリア周波数に対応するスペクトルの強度情報がモアレの撮像範囲内の最大値に近づくように調整することが好ましい。一方、回折格子または遮蔽格子の光軸に対する傾きは、例えば最小値に近づけるように調整しても良い。その場合、回折格子又は遮蔽格子の光軸に対する傾きを調整した後で、X線源から回折格子までの距離とX線源から遮蔽格子までの距離の少なくともいずれか一方を調整して回折格子から遮蔽格子までの距離を式(1)のz1に近づける。すると、モアレの撮像範囲全体のキャリア周波数に対応するスペクトルの強度情報を大きくなり、最大値に近づけた時と同等以上のキャリア周波数に対応するスペクトルの強度情報が得られる。
【0069】
回折格子または遮蔽格子の姿勢の調整は、アクチュエーターを用いて自動で行っても良いし、格子の姿勢を調整するボタンを用いるなどして手動で行っても良い。
【0070】
(実施形態2)
本実施形態では、分割した複数の領域毎にモアレ(干渉縞)のコントラストを表す指標であるビジビリティを算出し、算出したビジビリティの値に基づいて回折格子又は遮蔽格子の少なくともいずれか一方の姿勢を調整する。以下、本実施形態について図4、図6、図9、図10を用いて説明するが、実施形態1と重複する部分は省略する。
【0071】
本実施形態の構成は図1に示した実施形態1の場合と同様であり、調整部による調整方法だけ異なるため、調整部以外の説明は省略する。
【0072】
本実施形態の調整部も、検出器により撮像されたモアレの強度分布を複数の領域に分割し、各々の領域毎にキャリア周波数に対応したスペクトル強度情報を算出し、その強度情報の分布に基づいて回折格子と遮蔽格子の姿勢を調整する。但し、本実施形態では、ステップS431でCNRではなくビジビリティを算出する。
【0073】
ビジビリティとは上述のようにモアレのコントラストを表す指標である。一次元のモアレのビジビリティVは、
V=(Imax−Imin)/(Imax+Imin)・・・(6)
と定義される。但し、Imaxはモアレの強度の最大値、Iminはモアレの強度の最小値である。
【0074】
本実施形態では、2次元格子を用いており、モアレ強度分布も2次元であるため、式(6)に示したビジビリティの定義をそのまま用いることは困難である。そこで、式(6)がサインカーブ状のプロファイルに対しては平均値に対するサイン波の振幅の比率に等しいことに注目し、ビジビリティVを
V=PC(fx,fy)/PA(fx,fy)・・・(7)
と定義する。但し、PC(fx,fy)はキャリア周波数に対応するスペクトルC(fx,fy)のピーク値、PA(fx,fy)はDC成分に対応するスペクトルA(fx,fy)のピーク値である。ビジビリティの計算には、ステップS420で分割した各々の領域の、キャリア周波数に対応するスペクトルのピーク値とDC成分に対応するスペクトルのピーク値を用いる。ビジビリティを用いると、ビジビリティに基づいて回折格子や遮蔽格子の姿勢を調整することになる。すると、分割した各々の領域におけるバックグラウンドノイズの強度に領域間で差があっても、撮像範囲全体でビジビリティを一定の範囲内にすることができる。すると結果として、得られる被検体の位相像あるいは微分位相像の画質の不均一さを軽減することができる。
【0075】
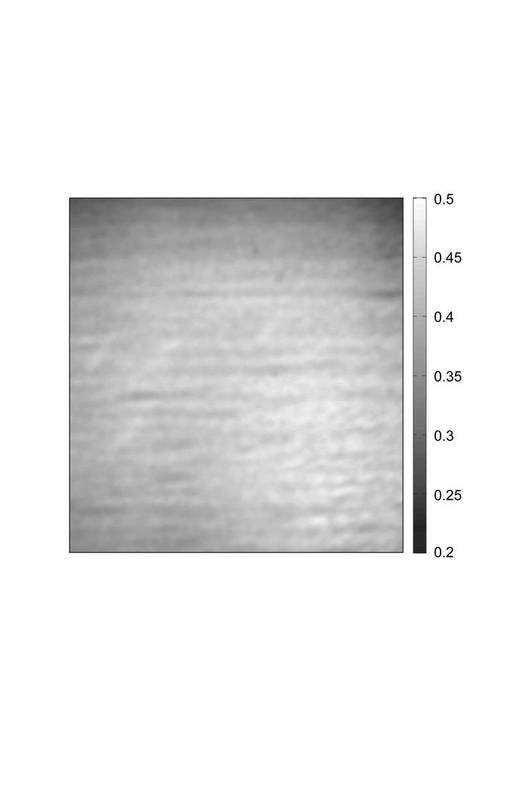
次に、実施形態1で行なったのと同様に、ステップS440では、ステップS431で取得したビジビリティの値からビジビリティ分布を得る。このビジビリティ分布は、実施形態1と同様に、ステップS421で分割された領域を1単位として作成する。図9は、ステップS440で得られるビジビリティ分布の一例であり、ステップ431で算出した領域毎のビジビリティの値を2次元マッピングしたものである。但し、ステップS440で得るビジビリティ分布は複数の領域についてビジビリティの数値情報が分かる情報であれば図9の様なマップでなくても良い。実施形態1でCNRの分布を用いて回折格子又は遮蔽格子の姿勢を調整したように、本実施形態ではこのビジビリティの分布を用いて、回折格子又は遮蔽格子の姿勢を調整する。
【0076】
ステップS441では、ステップS440で得られたビジビリティ分布を検出器画素の縦横方向に対して解析し、ビジビリティ分布のばらつきを標準偏差により評価する。
【0077】
次にステップS450で、ステップS441で得られた標準偏差がしきい値δ0以上の値であるかを判断する。得られた標準偏差がδ0よりも小さければそのまま回折格子と遮蔽格子の姿勢調整を行わず、δ0以上であれば以下に説明する回折格子と遮蔽格子の姿勢の調整を行う。
【0078】
本実施形態では標準偏差により各領域のビジビリティのばらつきを評価し、回折格子と遮蔽格子の姿勢の調整を行うか否かを決定しているが、実施形態1と同様に標準偏差以外の値で回折格子と遮蔽格子の姿勢の調整を行うか否かを決定しても良い。例えばビジビリティの最大値と最小値の差の絶対値で調整を行うか否かを決定しても良い。
【0079】
ステップS460では、ビジビリティ分布においてビジビリティの値が小さい領域の値が、最大値の値に近づくように、回折格子および遮蔽格子の姿勢を調整する。
【0080】
回折格子と遮蔽格子の姿勢の調整方法は実施形態1と同様である。
【0081】
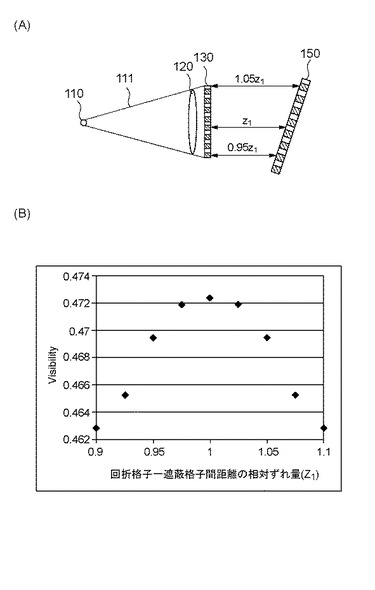
図10(A)は、図8(A)と同様はX線トールボット干渉法に用いられる撮像装置の構成例であり、格子間距離が上方で大きく、下方で小さくなっている。回折格子と遮蔽格子の中心間の距離は式(1)のz1であり、上方のある一点での格子間距離は1.05z1、下方のある一点での格子間距離は0.95z1である。
【0082】
図10(B)は格子間の距離の変化によるビジビリティの変化を示したグラフである。横軸は式(1)のz1を1とした時の格子間距離を示しており、縦軸はビジビリティの値を示している。図10(B)のようなグラフを参照して光軸に対する傾き調整量を計算すると、回折格子あるいは遮蔽格子の光軸に対する姿勢を調整できる。
【0083】
再度ステップS410〜S441を行い、ビジビリティ値の標準偏差がしきい値δ0以下になったとき、アライメント調整を完了する。傾き調整の方向が分からない場合は、回折格子又は遮蔽格子を任意の方向に動かし、その格子の移動によるビジビリティ値の変化によって適切な方向を判断すれば良い。
【0084】
回折格子と遮蔽格子の姿勢の調整方法の別の例として、回折格子又は遮蔽格子の光軸に対する傾き調整量を計算せずに回折格子又は遮蔽格子の光軸に対する傾きを調整する方法がある。この方法では、ビジビリティ値の平均値を計算し、その平均値と離れた値をとる領域における回折格子と遮蔽格子の距離を調整するように回折格子と遮蔽格子の傾きを所定の移動量分だけ調整する。ビジビリティ値の標準偏差がしきい値δ0以下になるまでステップS410〜S460を繰り返すことで、回折格子や遮蔽格子の姿勢を適切な姿勢に近づけることができる。
【0085】
干渉パターンに対する遮蔽格子の面内角度の調整も実施形態1と同様に行う。
【0086】
干渉パターンに対する遮蔽格子の面内角度は、ビジビリティ値にも影響を与える。干渉パターンと遮蔽格子のピッチによって最適な面内角度があり、その角度からずれるとビジビリティ値が小さくなる。そのため、回折格子及び遮蔽格子のうち少なくともいずれか一方の、光軸を中心とする回転を調整することで干渉パターンに対する遮蔽格子の面内角度の調整を行う。具体的な調整方法は、光軸に対する回折格子と遮蔽格子の傾きの調整方法と同様である。
【0087】
また、回折格子あるいは遮蔽格子の光軸を中心とする回転は、ビジビリティ値がモアレの撮像範囲内の最大値に近づくように調整することが好ましいが、光軸に対する傾きは、例えば最小値に近づけるように調整しても良い。その場合、光軸に対する傾きを調整した後でX線源から回折格子までの距離や、X線源から遮蔽格子までの距離を調整して回折格子から遮蔽格子までの距離を式(1)のz1に近づける。すると、モアレの撮像範囲全体のビジビリティ値が大きくなり、最大値に近づけた時と同等以上のビジビリティ値が得られる。
【0088】
実施形態1と2では検出器による検出結果であるモアレの強度分布を複数の領域に分割し、各々の領域毎にフーリエ変換を行う。そして、領域毎のフーリエ変換により得られた値を用いてキャリア周波数に対応したスペクトル強度に関する情報を算出し、その算出した値に基づいて回折格子又は遮蔽格子の姿勢を調整する。しかし、回折格子や遮蔽格子の姿勢の調整方法はこれに限定されない。
【0089】
例えば、縞走査を行うことで分割した領域毎にビジビリティを算出し、これに基づいて回折格子や遮蔽格子の姿勢を調整しても良い。また、モアレの強度分布を複数の領域に分割せずにモアレのボケ具合によって光軸に対する傾きを調整しても良い。
【0090】
また、調整部190は、検出器170で検出されたモアレの強度分布から被検体の微分位相像や位相像を得るための演算も行う。
【0091】
被検体の微分位相像や位相像を得るために、調整部190はまず、検出器170で検出されたモアレの強度分布をフーリエ変換することで空間周波数スペクトルを算出する。次に、キャリア周波数に対応するスペクトルを用いて位相回復処理を行い、微分位相像や位相像を得る。本実施形態では、調整部190で被検知の微分位相像や位相像を得るための演算を行っているが、別途に演算装置を設け、被検知の微分位相像や位相像を得るための演算を行っても良い。
【0092】
また、調整部190(或いは演算装置)に表示部を接続してX線撮像システムを構成しても良い。但し、本明細書においては、被検体の位相像や微分位相像を得るための演算を行うことができるX線撮像装置と、その演算結果に基づいた画像を表示する表示部をまとめてX線撮像システムと呼ぶ。
【0093】
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されず、その要旨の範囲内で種種の変形および変更が可能である。
【符号の説明】
【0094】
110 X線源
130 回折格子
150 遮蔽格子
170 検出器
190 調整部
【技術分野】
【0001】
本発明は、トールボット干渉を用いた撮像装置および撮像装置の調整方法に関する。
【背景技術】
【0002】
トールボット干渉法は光やX線を含む様々な波長の電磁波の干渉を用いて被検体の形状や組成を計測する方法であり、一般に、電磁波源、回折格子、検出器を備える撮像装置が用いられる。トールボット干渉法の原理について簡単に説明する。まず、電磁波源から位相波面の揃った、つまりコヒーレントな入射波を被検体に対し照射する。被検体を透過した電磁波は被検体の形状や組成によって波面が変化する。この波面変化が起きた電磁波が回折格子によって回折されると、回折格子からトールボット距離と呼ばれる特定の距離はなれた位置に干渉パターンが形成される。この干渉パターンを検出器によって検出し、解析することによって被検体によって変化した位相波面(以下、位相像と呼ぶ。)またはその位相波面の微分像(以下、微分位相像と呼ぶ。)を得ることができる。
【0003】
また特許文献1に記載されているように、電磁波を透過させる透過部と遮蔽する遮蔽部が周期的に配置された遮蔽格子を、干渉パターンが生じる位置に配置することでモアレを形成し、このモアレを検出し、解析して被検体の位相像や微分位相像を得る方法もある。この方法を用いると、干渉パターンの周期よりも空間分解能が大きい検出器を用いることができるため、電磁波としてX線を用いるトールボット干渉法(以下、X線トールボット干渉法と呼ぶ。)を用いた撮像装置に良く用いられる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−164373号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
遮蔽格子を用いてモアレを形成し、そのモアレの強度分布を検出するトールボット干渉計においては、用いる電磁波の波長や、回折格子や遮蔽格子のピッチによって撮像に適した回折格子や遮蔽格子の姿勢が決まる。回折格子や遮蔽格子の姿勢が撮像に適した姿勢からずれると、得られる被検体の位相像や微分位相像に対するノイズ比が増加するといった画質の低下につながる可能性がある。そこで本発明は、回折格子や遮蔽格子の姿勢を撮像に適した姿勢に調整することによって、より高画質な位相像や微分位相像を得ることができる撮像装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するために、本発明の一側面としての撮像装置は、電磁波源と、電磁波源から出射した電磁波を回折する回折格子と、回折格子によって回折された電磁波の一部を遮る遮蔽格子と、遮蔽格子を経た電磁波の強度分布を検出する検出器と、検出器の検出結果に基づいて回折格子および遮蔽格子のうち少なくともいずれか一方の姿勢を調整する調整部と、を有し、調整部は、
検出器で検出された強度分布を複数の領域に分割し、複数の領域の強度分布に基づいて、
回折格子および遮蔽格子のうち少なくともいずれか一方の姿勢を調整することを特徴とする。
【0007】
本発明のその他の側面については、以下で説明する実施の形態で明らかにする。
【発明の効果】
【0008】
本発明によれば、回折格子及び遮蔽格子のうち少なくともいずれか1つの姿勢を調整することによって、より高画質な位相像や微分位相像を得ることができる撮像装置を提供することが可能である。
【図面の簡単な説明】
【0009】
【図1】本発明の実施形態に係るX線撮像装置を説明する図である。
【図2】本発明の実施形態に係る2次元回折格子を説明する図である。
【図3】本発明の実施形態に係る2次元遮蔽格子を説明する図である。
【図4】本発明の実施形態に係る調整部における調整フローを説明する図である。
【図5】本発明の実施形態に係るモアレの強度分布の領域分割方法を表している図である。
【図6】本発明の実施形態に係る空間周波数スペクトルとキャリア周波数に対応したスペクトルを説明する図である。
【図7】本発明の実施形態に係るキャリア周波数に対応したスペクトル強度分布を説明する図である。
【図8】回折格子や遮蔽格子の光軸に対する傾きとCNRの変化を説明する図である。
【図9】本発明の実施形態に係るビジビリティ分布を説明する図である。
【図10】回折格子や遮蔽格子の光軸に対する傾きとビジビリティ値の変化を説明する図である。
【発明を実施するための形態】
【0010】
以下に、本発明の好ましい実施形態を添付の図面に基づいて詳細に説明する。なお、各図において、同一の部材については同一の参照番号を付し、重複する説明は省略する。
【0011】
以下にX線トールボット干渉法を用いたX線撮像装置を例にとり、実施形態1と2の説明をする。実施形態1と実施形態2の撮像装置は、検出器により検出した強度分布(モアレ)を複数の領域に分割し、その領域毎の強度分布に基づいて回折格子又は遮蔽格子の少なくともいずれか一方の姿勢を調整する。より具体的に説明をすると、まず、分割した領域毎にフーリエ変換を行い、キャリア周波数に対応したスペクトルの強度情報を得る。次に、領域毎のキャリア周波数に対応したスペクトルの強度情報に基づいて回折格子又は遮蔽格子の少なくともいずれか一方の姿勢を調整する。
【0012】
より具体的な実施形態については以下に説明をする。
【0013】
(実施形態1)
本実施形態では、分割した複数の領域毎にキャリア周波数に対応したスペクトルのピーク強度とそのスペクトルの周囲のバックグラウンドノイズの強度との比であるCarrier to Noise Ratio(以下、CNRと呼ぶ。)を算出し、算出したCNRの値に基づいて回折格子又は遮蔽格子の少なくともいずれか一方の姿勢を調整する。
【0014】
本実施形態の構成の一例を図1に示す。図1に示したX線撮像装置はX線源110と、X線源からのX線を回折する回折格子130と、回折格子130によって回折されたX線の一部を遮蔽する遮蔽格子150と、遮蔽格子を経たX線を検出する検出器170を備えている。更に、回折格子130と遮蔽格子150の姿勢を調整する調整部190も備えている。この撮像装置は、被検体120の位相情報をモアレとして撮像する。以下で各構成について説明をする。
【0015】
(X線源)
本実施形態の撮像装置は電磁波源としてX線源を備えている。X線源110から発生したX線111が被検体120を透過すると、被検体120の組成や形状に応じてX線111に位相の変化及び吸収が生じる。
【0016】
X線源としては、連続X線を発生させるX線源を用いても、特性X線を発生させるX線源を用いても良い。また、波長としては、0.1Å以上5Å以下のものから適宜選択される。また、X線源110から出射したX線の経路上に、波長選択フィルタやX線を細いビームに分割するための線源用の格子を適宜設けても良い。
【0017】
(回折格子)
回折格子130は位相進行部131と位相遅延部132が周期的に配置された位相格子である。回折格子として、遮蔽部と透過部が周期的に配置された遮蔽格子を用いることもできるが、位相格子を用いた方がX線量を確保できる点で有利である。回折格子130は、X線111を回折することで、明部と暗部を有する干渉パターン140を形成する。尚、本明細書ではX線(電磁波)の強度が高いところを明部、低いところを暗部と言う。
【0018】
図1では回折格子130は、被検体120と遮蔽格子150の間に配置されているが、X線源と被検体の間に配置しても良い。回折格子130を被検体120と遮蔽格子150の間に配置すると、被検体により位相波面が変化したX線が回折されることで被検体の位相情報を持った干渉パターンが形成される。一方、X線源と被検体の間に回折格子を配置すると、回折格子によって回折されたX線の位相波面が被検体により変化することで被検体の位相情報を持った干渉パターンが形成される。
【0019】
位相進行部131と位相遅延部132は、透過したX線に対して位相差がつくように形成されていれば良い。一般的には、位相遅延部132を透過したX線と、位相進行部131を透過したX線の位相差がπ、またはπ/2である。前者をπ回折格子、後者をπ/2回折格子と称する場合もある。但し、位相遅延部132を透過したX線と、位相進行部131を透過したX線の位相差は、πやπ/2でなくても、X線を回折する領域内で一定であれば良く、例えば透過したX線の位相差がπ/3でも良い。
【0020】
位相進行部131と位相遅延部132は1次元周期を持つように配置されていても良いし、2次元周期を持つように配置されていても良い。位相進行部131と位相遅延部132が2次元周期を持つように配置されている回折格子の例として、図2(A)に示すように位相進行部131aと位相遅延部132aが市松格子状に配置されている回折格子が挙げられる。他にも、図2(B)に示すような位相進行部131bと位相遅延部132bが井桁格子状に配置されているものも挙げられる。しかし、位相進行部131と位相遅延部132の配置方法や形状はこれらに限定されるものではなく、例えば位相進行部や位相遅延部の外縁が円形状であっても回折格子として利用することが可能である。
【0021】
回折格子130が1次元の周期を有する場合には、被検体120の1次元方向の位相勾配情報しか取得できない。しかし、回折格子130が2次元の周期を有する場合には、2次元方向の位相勾配情報を取得することができるため、より正確に被検体の位相情報を得ることができる。
【0022】
なお、回折格子130を構成する材料はX線を透過する物質であることが好ましく、例えば、シリコン等を用いることができる。
【0023】
X線が回折格子130に回折されることで形成される干渉パターンは、X線源110と回折格子130との距離をZ0とすると、回折格子130からの距離Z1が下記の式(1)を満たしている位置に最も明瞭に現れる。
【0024】
式(1)において、λはX線の波長、dは回折格子130の格子周期である。
【0025】
【数1】
【0026】
Nは回折格子の形態により異なる値であり、以下のように表現できる実数である。なお、nは自然数である。
1次元配列のπ回折格子:N=n/4−1/8
1次元配列のπ/2回折格子:N=n−1/2
2次元配列の市松模様π回折格子:N=n/4−1/8
2次元で市松模様π/2回折格子:N=n/2−1/4
【0027】
(遮蔽格子)
遮蔽格子150は、周期的に配置された透過部151と遮蔽部152を有し、
干渉パターン140の明部を形成するX線の一部を遮蔽することでモアレを形成する。そのため、回折格子130から距離Z1だけ離れた位置に設けられることが好ましいが、製造誤差程度であれば遮蔽格子の配置位置がずれていてもモアレを形成することができる。(図1では説明の都合上、干渉パターン140と遮蔽格子150を離して記載している。)
なお、遮蔽部152と透過部151は干渉パターン140が形成される位置に遮蔽格子が配置された時にモアレが生じる程度にX線を遮蔽または透過すれば良く、X線を完全に遮蔽または透過しなくても良い。透過部151は貫通孔でも良いが、例えばシリコンのようなX線を透過する物質で構成されていても良い。一方、遮蔽部152を構成する材料として、例えば、金を用いることができる。
【0028】
遮蔽格子150の周期は、干渉パターンと同一、または僅かに異なる。干渉パターンと同一の周期を持つ遮蔽格子を用いた場合、干渉パターンに対して遮蔽格子を面内回転させることによってモアレが発生する。干渉パターンの周期をD、干渉パターンの明暗の周期方向と遮蔽格子の周期方向のなす角をθ(ただし、θ<<1ラジアン)とすれば、モアレの周期Dmは、D/θとなる。
【0029】
一方、干渉パターンと僅かに異なる周期を持つ遮蔽格子を用いた場合、遮蔽格子の面内回転を行なうことなくモアレが発生する。遮蔽格子の周期をDa=D+δ(ただしδ<<D)とすれば、モアレの周期Dmは、D2/δとなる。
【0030】
遮蔽格子150において、透過部151と遮蔽部152は、1次元周期的に配列されていてもよいし、また2次元周期的に配列されていてもよい。
【0031】
例えば、図2(A)に示した市松格子状の回折格子であって、π回折格子を用いた場合には、図3(A)のように透過部151aと遮蔽部152aが2次元的に配列されている井桁格子状の遮蔽格子150aを用いることができる。また、図2(A)に示した市松格子状のπ/2回折格子を用いた場合には、図3(B)のように透過部151bと遮蔽部152bが2次元的に配列されている市松格子状の遮蔽格子150bを用いることができる。
なお、上記の組合せは一例であり、回折格子と遮蔽格子は種々の組合せが可能である。
【0032】
(検出器)
前記遮蔽格子150を透過したX線の干渉パターンの情報はモアレの強度分布として、X線検出器170によって検出される。X線検出器170は、X線のモアレを撮像することのできる撮像素子である。検出器として、例えば、デジタル信号への変換が可能なFPD(Flat Panel Detector)等を用いることができる。
【0033】
(調整部)
調整部190は、検出器により検出されたモアレの強度分布を複数の領域に分割し、各々の領域毎にキャリア周波数に対応したスペクトル強度情報を算出し、その強度情報の分布に基づいて回折格子と遮蔽格子の姿勢を調整する。但し、本明細書におけるキャリア周波数とは、モアレの基本周期成分の周波数のことを指す。
【0034】
調整部が行う回折格子と遮蔽格子の姿勢の調整方法について、図4に従って説明する。
【0035】
ステップS410では、モアレを撮像することによってモアレの強度分布が検出器上の画素毎の強度データとして取得される。
【0036】
次に、ステップS420で領域分割数を決定する。領域分割数は、格子の調整精度や、キャリア周波数に対応したスペクトル強度情報の分布状況などによって決定される。但し、キャリア周波数に対応したスペクトル強度情報の分布状況を考慮せずに、格子の調整精度などから予め領域分割数を決定しておき、姿勢調整時には常に決められた数の領域分割数を採っても良い。その場合、ステップS420は不要である。
【0037】
ステップS421では、ステップS420で決定された領域分割数に応じて図5のように領域を分割する。図5(A)では線で囲まれた正方形の1つ1つが検出器の画素を、太線で囲まれた正方形の1つ1つが分割された領域を示しており、モアレの撮像範囲の全領域501a内で、分割された領域510a同士がたがいに接している。この場合、各々の領域の一辺は、検出器の画素ピッチをq、縦方向および横方向の画素数をn、縦方向及び横方向の分割数をmとすると、nq/mで表される。ここでm、およびnは整数である。分割方法はこの限りではなく、例えば、図5(B)に示したように、モアレの撮像範囲の全領域501b内で、分割された領域510bが互いに接していなくても良い。尚、図5(B)のように撮像範囲を分割すると、どの領域にも含まれない画素が存在する。
【0038】
次に、ステップS430とS431によって、ステップS421で分割された領域毎にキャリア周波数に対応したスペクトルの強度情報を取得する。
【0039】
ステップS430では、分割された領域毎にフーリエ変換を行う。
【0040】
干渉パターンが形成される際には多数の回折光が重なって干渉するため、キャリア周波数と数多くのその高調波成分を含んでいる。しかし、モアレは干渉パターンのキャリア周波数成分を空間的に拡大した形状を持つので、x軸を周期方向とする1次元の回折格子を使用した場合にモアレは(2)式で表すことができる。
g(x,y)=a(x,y)+b(x,y)cos(2πf0x+φ(x,y))…(2)
ここで、a(x,y)はバックグラウンドを表し、b(x,y)はモアレのキャリア周波数成分の振幅を表す。また、f0はモアレのキャリア周波数を表し、φ(x,y)はキャリア周波数成分の位相を表している。(2)式は、モアレが、バックグラウンドの第1項と、周期性を持った第2項との和で表されることを示している。
【0041】
また、2次元の回折格子を使用した場合のモアレは、(2)式にy方向のキャリア周波数成分が重畳した形状となる。
【0042】
回折格子130として市松状のπ/2回折格子を用いた場合、キャリア周波数成分は、0次回折光と+1次回折光の干渉、および0次回折光と−1次回折光の干渉によって生じる。また、回折格子130として市松状のπ回折格子を用いた場合は+1次回折光と−1次回折光の干渉によってキャリア周波数成分が生じる。
【0043】
0次回折光と1次回折光は回折格子130で互いにNdだけ離れた位置にある光線が重なり、+1次回折光と−1次回折光は回折格子130で互いに2Ndだけ離れた位置にある光線が重なる。すなわち、これらの干渉はπ/2回折格子の場合はシア量sがNd、π回折格子の場合はシア量sが2Ndのシアリング干渉である。
【0044】
ところで、(2)式は
g(x,y)=a(x,y)+c(x,y)exp(2πif0x)+c*(x,y)exp(−2πif0x)…(3)
と書き表すことができる。ここで
c(x,y)=1/2b(x,y)exp[iφ(x,y)]…(4)である。
【0045】
したがって、干渉縞からc(x,y)の成分またはc*(x,y)の成分を取り出すことにより、位相φ(x,y)の情報を得ることも可能である。
【0046】
ここで、フーリエ変換によって(4)式は
G(fx,fy)=A(fx,fy)+C(fx−f0,fy)+C*(fx+f0,fy)…(5)となる。
【0047】
ここでG(fx,fy)、A(fx,fy)、C(fx,fy)はそれぞれg(x,y)、a(x,y)、c(x,y)に対する2次元のフーリエ変換である。
【0048】
図6は、1次元周期を持つ格子を使用した場合に検出したモアレの強度分布をフーリエ変換して得られる空間周波数スペクトルである。通常、図6のように3つのスペクトルが生じる。中央のスペクトルは主としてA(fx,fy)に由来するスペクトルである。一方、その両脇のスペクトルはそれぞれC(fx,fy)とC*(fx,fy)に由来するキャリア周波数に対応するスペクトルであり、これらのスペクトルのピークは±f0の位置に生じる。
【0049】
ステップS431でキャリア周波数に対応するスペクトルの強度情報を得る。本実施形態では、キャリア周波数に対応するスペクトルの強度情報として、CNRを用いる。CNRは、キャリア周波数に対応したスペクトルのピーク強度とそのスペクトルの周囲のバックグラウンドノイズの強度との比である。CNRの計算には、ステップS420で分割した各々の領域の、キャリア周波数に対応するスペクトルのピーク強度とバックグラウンドノイズの強度を用いる。本実施形態では、キャリア周波数に対応するスペクトルの強度情報として、CNRを用いて回折格子又は遮蔽格子の姿勢を調整するが、他の値を用いて回折格子又は遮蔽格子の調整を行っても良い。キャリア周波数に対応するスペクトルの強度情報として、例えば、スペクトルのピーク強度又はスペクトルの積分強度を用いて良い。スペクトルのピーク強度は、C(fx,fy)またはC*(fx,fy)の絶対値|C(fx,fy)|、および|C*(fx,fy)|であり、スペクトルの積分強度は、積分値∬C(fx,fy)dxdy、および∬C*(fx,fy)dxdyである。また、キャリア周波数に対応するスペクトルの強度情報とは、キャリア周波数に対応するスペクトル(C(fx,fy)またはC*(fx,fy))の強度に関する情報のことであり、ビジビリティも含む。ビジビリティについては実施形態2で説明をする。
【0050】
キャリア周波数に対応するスペクトルの強度情報としてCNRを用いると、CNRに基づいて回折格子や遮蔽格子の姿勢を調整することになる。すると、分割した各々の領域におけるバックグラウンドノイズの強度に領域間で差があっても、撮像範囲全体でCNRを一定の範囲内にすることができる。すると結果として、得られる被検体の位相像あるいは微分位相像の画質の不均一さを軽減することができる。つまり、位相像あるいは微分位相像が、特定の領域だけノイズが高いといったことを防ぐことができる。バックグラウンドノイズの強度が領域間で異なる原因として、例えば製造誤差により回折格子又は遮蔽格子の周期が特定の領域で異なることが挙げられる。
【0051】
次のステップS440では、ステップS430で得たキャリア周波数に対応したスペクトルの強度情報からスペクトルの強度分布を得る。このスペクトル強度分布は、ステップS421で分割された領域を1単位として作成する。つまり、本実施形態ではステップS431で算出したCNRからCNRの分布を得る。図7は、スペクトル強度分布の一例であり、ステップS431で領域毎に算出したCNRの値を2次元マッピングしたものである。但し、ステップS440で得るスペクトルの強度分布は実際には図7の様なマップでなくても良い。複数の領域についてキャリア周波数に対応するスペクトルの強度情報(本実施形態ではCNR)が分かる情報のことを本明細書ではスペクトルの強度分布と呼ぶ。
【0052】
ステップS441では、ステップS440で得られたスペクトル強度分布を検出器画素の縦横方向に対して解析し、スペクトル強度分布のばらつきを標準偏差により評価する。
【0053】
次にステップS450で、ステップS441で得られた標準偏差がしきい値δ0以上の値であるかを判断する。得られた標準偏差がδ0よりも小さければそのまま回折格子と遮蔽格子の姿勢調整を行わず、δ0以上であれば以下に説明する回折格子と遮蔽格子の姿勢の調整を行う。
【0054】
但し、ステップS441とS450では標準偏差によりスペクトル強度分布のばらつきを評価し、回折格子と遮蔽格子の姿勢の調整を行うか否かを決定しているが、標準偏差以外の値で調整を行うか否かを決定しても本発明の効果を得ることができる。例えばスペクトル強度情報の最大値と最小値の差の絶対値で調整を行うか否かを決定しても良い。
【0055】
ステップS460では、スペクトル強度分布においてキャリア周波数に対応するスペクトルの強度情報の値が小さい領域の値が、最大値の値に近づくように、回折格子および遮蔽格子の姿勢を調整する。
【0056】
回折格子と遮蔽格子の姿勢の調整について説明をする。
【0057】
本実施形態の撮像装置は、回折格子と遮蔽格子の姿勢の調整により、光軸に対する回折格子と遮蔽格子の傾きと、干渉パターンに対する遮蔽格子の面内角度を調整する。
【0058】
まず、光軸に対する回折格子と遮蔽格子の傾きの調整について説明をする。
【0059】
図8(A)はX線トールボット干渉法に用いられる撮像装置の構成例であり、光軸に対して遮蔽格子が傾いており、回折格子と遮蔽格子間の距離(以下、格子間距離と呼ぶ。)が上方で大きく、下方で小さくなっている。但し、本明細書における、光軸に対する傾きとは、光軸に対するチルトであり、回折格子や遮蔽格子が光軸に対して、どの程度傾いているかのアオリ角のことをいう。回折格子と遮蔽格子の中心間の距離は式(1)のz1であり、上方のある一点での格子間距離は1.05z1、下方のある一点での格子間距離は0.95z1である。
【0060】
図8(B)は格子間の距離の変化によるCNRの変化を示したグラフである。横軸は式(1)のz1を1とした時の格子間距離を示しており、縦軸はCNRの値を示している。このグラフより、格子間距離が理想的な距離(z1)から5%ずれることによって、CNRが0.35dB下がることがわかる。
【0061】
図8(B)のグラフは格子間距離とCNRの関係のみを示しているが、スペクトルのピーク強度やスペクトルの積分強度のような、CNR以外のキャリア周波数に対応するスペクトル強度も格子間距離によって変化する。
【0062】
このように、光軸に対する回折格子と遮蔽格子の傾きにより、キャリア周波数に対応するスペクトルの強度情報が変化するため、回折格子と遮蔽格子の光軸に対する傾きを調整する。
【0063】
回折格子と遮蔽格子の光軸に対する傾きの具体的な調整方法の例について説明をする。まず、ステップS440により取得したスペクトルの強度分布から、最もCNRが大きい領域のCNR値と、そのほかの領域のCNR値の差を夫々計算する。その後、図8(B)のようなグラフを参照して回折格子又は遮蔽格子の光軸に対する傾き調整量を計算し、その計算結果に基づいて回折格子又は遮蔽格子の光軸に対する傾きを調整する。再度ステップS410〜S450を行い、キャリア周波数に対応したスペクトル強度情報の標準偏差がしきい値δ0以下であれば光軸に対する回折格子と遮蔽格子の姿勢の調整を完了する。回折格子と遮蔽格子の両方の傾きを調整しても良い。傾き調整の方向(X線源側に傾けるのか、検出器側に傾けるのか。)が分からない場合は、回折格子又は遮蔽格子を任意の方向に傾けてステップS410〜S431を行い、キャリア周波数に対応するスペクトルの強度情報の変化によって適切な方向を判断すればよい。また、回折格子又は遮蔽格子の光軸に対する傾き調整を一回で行う場合、キャリア周波数に対応したスペクトル強度情報の標準偏差がしきい値δ0以下であるかの確認(ステップS410〜S450)は行わなくてもよい。
【0064】
また、調整方法の別の例として、回折格子又は遮蔽格子の光軸に対する傾き調整量を計算せずに回折格子又は遮蔽格子の光軸に対する傾き調整量を調整する方法がある。
【0065】
この方法では、あらかじめ傾き移動量を決めておき、回折格子又は遮蔽格子の光軸に対する傾きを所定の移動量だけ移動させてから再度ステップS410〜S450を行う。
【0066】
キャリア周波数に対応したスペクトル強度情報の標準偏差がしきい値δ0以下になるまで、所定の量の傾き移動とステップS410〜S460を繰り返すことで、回折格子や遮蔽格子の姿勢を適切な姿勢に近づけることができる。
【0067】
次に干渉パターンに対する遮蔽格子の面内角度の調整について説明をする。干渉パターンに対する遮蔽格子の面内角度は、前述のようにモアレの周期に影響するが、キャリア周波数に対応したスペクトルの強度情報にも影響を与える。干渉パターンと遮蔽格子のピッチによって最適な面内角度があり、その角度からずれるとキャリア周波数に対応したスペクトルの強度情報が小さくなる。そのため、回折格子及び遮蔽格子のうち少なくともいずれか一方の、光軸を中心とする回転を調整することで干渉パターンに対する遮蔽格子の面内角度の調整を行う。具体的な調整方法は、光軸に対する回折格子と遮蔽格子の傾きの調整方法と同様である。
【0068】
回折格子または遮蔽格子の光軸を中心とする回転は、キャリア周波数に対応するスペクトルの強度情報がモアレの撮像範囲内の最大値に近づくように調整することが好ましい。一方、回折格子または遮蔽格子の光軸に対する傾きは、例えば最小値に近づけるように調整しても良い。その場合、回折格子又は遮蔽格子の光軸に対する傾きを調整した後で、X線源から回折格子までの距離とX線源から遮蔽格子までの距離の少なくともいずれか一方を調整して回折格子から遮蔽格子までの距離を式(1)のz1に近づける。すると、モアレの撮像範囲全体のキャリア周波数に対応するスペクトルの強度情報を大きくなり、最大値に近づけた時と同等以上のキャリア周波数に対応するスペクトルの強度情報が得られる。
【0069】
回折格子または遮蔽格子の姿勢の調整は、アクチュエーターを用いて自動で行っても良いし、格子の姿勢を調整するボタンを用いるなどして手動で行っても良い。
【0070】
(実施形態2)
本実施形態では、分割した複数の領域毎にモアレ(干渉縞)のコントラストを表す指標であるビジビリティを算出し、算出したビジビリティの値に基づいて回折格子又は遮蔽格子の少なくともいずれか一方の姿勢を調整する。以下、本実施形態について図4、図6、図9、図10を用いて説明するが、実施形態1と重複する部分は省略する。
【0071】
本実施形態の構成は図1に示した実施形態1の場合と同様であり、調整部による調整方法だけ異なるため、調整部以外の説明は省略する。
【0072】
本実施形態の調整部も、検出器により撮像されたモアレの強度分布を複数の領域に分割し、各々の領域毎にキャリア周波数に対応したスペクトル強度情報を算出し、その強度情報の分布に基づいて回折格子と遮蔽格子の姿勢を調整する。但し、本実施形態では、ステップS431でCNRではなくビジビリティを算出する。
【0073】
ビジビリティとは上述のようにモアレのコントラストを表す指標である。一次元のモアレのビジビリティVは、
V=(Imax−Imin)/(Imax+Imin)・・・(6)
と定義される。但し、Imaxはモアレの強度の最大値、Iminはモアレの強度の最小値である。
【0074】
本実施形態では、2次元格子を用いており、モアレ強度分布も2次元であるため、式(6)に示したビジビリティの定義をそのまま用いることは困難である。そこで、式(6)がサインカーブ状のプロファイルに対しては平均値に対するサイン波の振幅の比率に等しいことに注目し、ビジビリティVを
V=PC(fx,fy)/PA(fx,fy)・・・(7)
と定義する。但し、PC(fx,fy)はキャリア周波数に対応するスペクトルC(fx,fy)のピーク値、PA(fx,fy)はDC成分に対応するスペクトルA(fx,fy)のピーク値である。ビジビリティの計算には、ステップS420で分割した各々の領域の、キャリア周波数に対応するスペクトルのピーク値とDC成分に対応するスペクトルのピーク値を用いる。ビジビリティを用いると、ビジビリティに基づいて回折格子や遮蔽格子の姿勢を調整することになる。すると、分割した各々の領域におけるバックグラウンドノイズの強度に領域間で差があっても、撮像範囲全体でビジビリティを一定の範囲内にすることができる。すると結果として、得られる被検体の位相像あるいは微分位相像の画質の不均一さを軽減することができる。
【0075】
次に、実施形態1で行なったのと同様に、ステップS440では、ステップS431で取得したビジビリティの値からビジビリティ分布を得る。このビジビリティ分布は、実施形態1と同様に、ステップS421で分割された領域を1単位として作成する。図9は、ステップS440で得られるビジビリティ分布の一例であり、ステップ431で算出した領域毎のビジビリティの値を2次元マッピングしたものである。但し、ステップS440で得るビジビリティ分布は複数の領域についてビジビリティの数値情報が分かる情報であれば図9の様なマップでなくても良い。実施形態1でCNRの分布を用いて回折格子又は遮蔽格子の姿勢を調整したように、本実施形態ではこのビジビリティの分布を用いて、回折格子又は遮蔽格子の姿勢を調整する。
【0076】
ステップS441では、ステップS440で得られたビジビリティ分布を検出器画素の縦横方向に対して解析し、ビジビリティ分布のばらつきを標準偏差により評価する。
【0077】
次にステップS450で、ステップS441で得られた標準偏差がしきい値δ0以上の値であるかを判断する。得られた標準偏差がδ0よりも小さければそのまま回折格子と遮蔽格子の姿勢調整を行わず、δ0以上であれば以下に説明する回折格子と遮蔽格子の姿勢の調整を行う。
【0078】
本実施形態では標準偏差により各領域のビジビリティのばらつきを評価し、回折格子と遮蔽格子の姿勢の調整を行うか否かを決定しているが、実施形態1と同様に標準偏差以外の値で回折格子と遮蔽格子の姿勢の調整を行うか否かを決定しても良い。例えばビジビリティの最大値と最小値の差の絶対値で調整を行うか否かを決定しても良い。
【0079】
ステップS460では、ビジビリティ分布においてビジビリティの値が小さい領域の値が、最大値の値に近づくように、回折格子および遮蔽格子の姿勢を調整する。
【0080】
回折格子と遮蔽格子の姿勢の調整方法は実施形態1と同様である。
【0081】
図10(A)は、図8(A)と同様はX線トールボット干渉法に用いられる撮像装置の構成例であり、格子間距離が上方で大きく、下方で小さくなっている。回折格子と遮蔽格子の中心間の距離は式(1)のz1であり、上方のある一点での格子間距離は1.05z1、下方のある一点での格子間距離は0.95z1である。
【0082】
図10(B)は格子間の距離の変化によるビジビリティの変化を示したグラフである。横軸は式(1)のz1を1とした時の格子間距離を示しており、縦軸はビジビリティの値を示している。図10(B)のようなグラフを参照して光軸に対する傾き調整量を計算すると、回折格子あるいは遮蔽格子の光軸に対する姿勢を調整できる。
【0083】
再度ステップS410〜S441を行い、ビジビリティ値の標準偏差がしきい値δ0以下になったとき、アライメント調整を完了する。傾き調整の方向が分からない場合は、回折格子又は遮蔽格子を任意の方向に動かし、その格子の移動によるビジビリティ値の変化によって適切な方向を判断すれば良い。
【0084】
回折格子と遮蔽格子の姿勢の調整方法の別の例として、回折格子又は遮蔽格子の光軸に対する傾き調整量を計算せずに回折格子又は遮蔽格子の光軸に対する傾きを調整する方法がある。この方法では、ビジビリティ値の平均値を計算し、その平均値と離れた値をとる領域における回折格子と遮蔽格子の距離を調整するように回折格子と遮蔽格子の傾きを所定の移動量分だけ調整する。ビジビリティ値の標準偏差がしきい値δ0以下になるまでステップS410〜S460を繰り返すことで、回折格子や遮蔽格子の姿勢を適切な姿勢に近づけることができる。
【0085】
干渉パターンに対する遮蔽格子の面内角度の調整も実施形態1と同様に行う。
【0086】
干渉パターンに対する遮蔽格子の面内角度は、ビジビリティ値にも影響を与える。干渉パターンと遮蔽格子のピッチによって最適な面内角度があり、その角度からずれるとビジビリティ値が小さくなる。そのため、回折格子及び遮蔽格子のうち少なくともいずれか一方の、光軸を中心とする回転を調整することで干渉パターンに対する遮蔽格子の面内角度の調整を行う。具体的な調整方法は、光軸に対する回折格子と遮蔽格子の傾きの調整方法と同様である。
【0087】
また、回折格子あるいは遮蔽格子の光軸を中心とする回転は、ビジビリティ値がモアレの撮像範囲内の最大値に近づくように調整することが好ましいが、光軸に対する傾きは、例えば最小値に近づけるように調整しても良い。その場合、光軸に対する傾きを調整した後でX線源から回折格子までの距離や、X線源から遮蔽格子までの距離を調整して回折格子から遮蔽格子までの距離を式(1)のz1に近づける。すると、モアレの撮像範囲全体のビジビリティ値が大きくなり、最大値に近づけた時と同等以上のビジビリティ値が得られる。
【0088】
実施形態1と2では検出器による検出結果であるモアレの強度分布を複数の領域に分割し、各々の領域毎にフーリエ変換を行う。そして、領域毎のフーリエ変換により得られた値を用いてキャリア周波数に対応したスペクトル強度に関する情報を算出し、その算出した値に基づいて回折格子又は遮蔽格子の姿勢を調整する。しかし、回折格子や遮蔽格子の姿勢の調整方法はこれに限定されない。
【0089】
例えば、縞走査を行うことで分割した領域毎にビジビリティを算出し、これに基づいて回折格子や遮蔽格子の姿勢を調整しても良い。また、モアレの強度分布を複数の領域に分割せずにモアレのボケ具合によって光軸に対する傾きを調整しても良い。
【0090】
また、調整部190は、検出器170で検出されたモアレの強度分布から被検体の微分位相像や位相像を得るための演算も行う。
【0091】
被検体の微分位相像や位相像を得るために、調整部190はまず、検出器170で検出されたモアレの強度分布をフーリエ変換することで空間周波数スペクトルを算出する。次に、キャリア周波数に対応するスペクトルを用いて位相回復処理を行い、微分位相像や位相像を得る。本実施形態では、調整部190で被検知の微分位相像や位相像を得るための演算を行っているが、別途に演算装置を設け、被検知の微分位相像や位相像を得るための演算を行っても良い。
【0092】
また、調整部190(或いは演算装置)に表示部を接続してX線撮像システムを構成しても良い。但し、本明細書においては、被検体の位相像や微分位相像を得るための演算を行うことができるX線撮像装置と、その演算結果に基づいた画像を表示する表示部をまとめてX線撮像システムと呼ぶ。
【0093】
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されず、その要旨の範囲内で種種の変形および変更が可能である。
【符号の説明】
【0094】
110 X線源
130 回折格子
150 遮蔽格子
170 検出器
190 調整部
【特許請求の範囲】
【請求項1】
電磁波を回折する回折格子と、
前記回折格子によって回折された前記電磁波の一部を遮る遮蔽格子と、
前記遮蔽格子を経た前記電磁波の強度分布を検出する検出器と、
前記検出器の検出結果に基づいて前記回折格子および遮蔽格子のうち少なくともいずれか一方の姿勢を調整する調整部と、を有し、
前記調整部は、
前記検出器で検出された前記強度分布を複数の領域に分割し、
前記複数の領域の前記強度分布に基づいて、前記回折格子および前記遮蔽格子のうち少なくともいずれか一方の姿勢を調整することを特徴とする撮像装置。
【請求項2】
前記調整部は、
分割した前記複数の領域における前記強度分布をフーリエ変換することでキャリア周波数に対応したスペクトルの強度情報を計算し、
前記キャリア周波数に対応したスペクトルの強度分布に基づいて前記回折格子および前記遮蔽格子のうち少なくともいずれか一方の姿勢を調整することを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記キャリア周波数に対応したスペクトルの強度情報が、前記キャリア周波数に対応したスペクトルの強度と、そのスペクトルの周囲のバックグラウンドノイズの強度との比であることを特徴とする請求項2に記載の撮像装置。
【請求項4】
前記キャリア周波数に対応したスペクトルの強度情報が、前記キャリア周波数に対応したスペクトルのピーク値と、DC成分に対応するスペクトルのピーク値との比であるビジビリティ値であることを特徴とする請求項2に記載の撮像装置。
【請求項5】
前記調整部は、
前記回折格子および前記遮蔽格子のうち少なくともいずれか一方の、光軸に対する傾きを調整することを特徴とする請求項1乃至4のいずれか1項に記載の撮像装置。
【請求項6】
前記調整部は、
前記回折格子および前記遮蔽格子のうち少なくともいずれか一方の、光軸を中心とする回転を調整することを特徴とする請求項1乃至5のいずれか1項に記載の撮像装置。
【請求項7】
前記調整部は、
前記キャリア周波数に対応したスペクトルの強度情報の標準偏差が小さくなるように前記回折格子と前記遮蔽格子の少なくともいずれか1つの姿勢を調整することを特徴とする請求項2乃至4のいずれか1項に記載の撮像装置。
【請求項8】
前記電磁波がX線であることを特徴とする請求項1乃至7のいずれか1項に記載の撮像装置。
【請求項9】
電磁波源からの電磁波を回折する回折格子と、
前記回折格子によって回折された前記電磁波の一部を遮る遮蔽格子と、
前記遮蔽格子を経た前記電磁波の強度分布を検出する検出器と、を有する撮像装置の前記回折格子および前記遮蔽格子のうち少なくともいずれか一方の姿勢を調整する調整方法であって、
前記検出器で検出された強度分布を複数の領域に分割する工程と、
前記複数の領域の前記強度分布に基づいて、前記回折格子および前記遮蔽格子のうち少なくともいずれか一方の姿勢を調整する工程と、
を有することを特徴とする撮像装置の調整方法。
【請求項10】
電磁波源からの電磁波を回折する回折格子と、
前記回折格子によって回折された前記電磁波の一部を遮る遮蔽格子と、
前記遮蔽格子を経た前記電磁波の強度分布を検出する検出器と、
前記検出器の検出結果に基づいて前記回折格子および遮蔽格子のうち少なくともいずれか一方の姿勢を調整する調整部と、を有し、
前記調整部は、
前記検出器で検出された強度分布に基づいて前記回折格子および前記遮蔽格子のうち少なくともいずれか一方の光軸に対する傾きを調整することを特徴とする撮像装置。
【請求項11】
電磁波源からの電磁波を回折する回折格子と、
前記回折格子によって回折された前記電磁波の一部を遮る遮蔽格子と、
前記遮蔽格子を経た前記電磁波の強度分布を検出する検出器と、を有する撮像装置に用いられ、
前記検出器で検出された強度分布に基づいて前記回折格子および前記遮蔽格子のうち少なくともいずれか一方の光軸に対する傾きを調整する調整方法。
【請求項1】
電磁波を回折する回折格子と、
前記回折格子によって回折された前記電磁波の一部を遮る遮蔽格子と、
前記遮蔽格子を経た前記電磁波の強度分布を検出する検出器と、
前記検出器の検出結果に基づいて前記回折格子および遮蔽格子のうち少なくともいずれか一方の姿勢を調整する調整部と、を有し、
前記調整部は、
前記検出器で検出された前記強度分布を複数の領域に分割し、
前記複数の領域の前記強度分布に基づいて、前記回折格子および前記遮蔽格子のうち少なくともいずれか一方の姿勢を調整することを特徴とする撮像装置。
【請求項2】
前記調整部は、
分割した前記複数の領域における前記強度分布をフーリエ変換することでキャリア周波数に対応したスペクトルの強度情報を計算し、
前記キャリア周波数に対応したスペクトルの強度分布に基づいて前記回折格子および前記遮蔽格子のうち少なくともいずれか一方の姿勢を調整することを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記キャリア周波数に対応したスペクトルの強度情報が、前記キャリア周波数に対応したスペクトルの強度と、そのスペクトルの周囲のバックグラウンドノイズの強度との比であることを特徴とする請求項2に記載の撮像装置。
【請求項4】
前記キャリア周波数に対応したスペクトルの強度情報が、前記キャリア周波数に対応したスペクトルのピーク値と、DC成分に対応するスペクトルのピーク値との比であるビジビリティ値であることを特徴とする請求項2に記載の撮像装置。
【請求項5】
前記調整部は、
前記回折格子および前記遮蔽格子のうち少なくともいずれか一方の、光軸に対する傾きを調整することを特徴とする請求項1乃至4のいずれか1項に記載の撮像装置。
【請求項6】
前記調整部は、
前記回折格子および前記遮蔽格子のうち少なくともいずれか一方の、光軸を中心とする回転を調整することを特徴とする請求項1乃至5のいずれか1項に記載の撮像装置。
【請求項7】
前記調整部は、
前記キャリア周波数に対応したスペクトルの強度情報の標準偏差が小さくなるように前記回折格子と前記遮蔽格子の少なくともいずれか1つの姿勢を調整することを特徴とする請求項2乃至4のいずれか1項に記載の撮像装置。
【請求項8】
前記電磁波がX線であることを特徴とする請求項1乃至7のいずれか1項に記載の撮像装置。
【請求項9】
電磁波源からの電磁波を回折する回折格子と、
前記回折格子によって回折された前記電磁波の一部を遮る遮蔽格子と、
前記遮蔽格子を経た前記電磁波の強度分布を検出する検出器と、を有する撮像装置の前記回折格子および前記遮蔽格子のうち少なくともいずれか一方の姿勢を調整する調整方法であって、
前記検出器で検出された強度分布を複数の領域に分割する工程と、
前記複数の領域の前記強度分布に基づいて、前記回折格子および前記遮蔽格子のうち少なくともいずれか一方の姿勢を調整する工程と、
を有することを特徴とする撮像装置の調整方法。
【請求項10】
電磁波源からの電磁波を回折する回折格子と、
前記回折格子によって回折された前記電磁波の一部を遮る遮蔽格子と、
前記遮蔽格子を経た前記電磁波の強度分布を検出する検出器と、
前記検出器の検出結果に基づいて前記回折格子および遮蔽格子のうち少なくともいずれか一方の姿勢を調整する調整部と、を有し、
前記調整部は、
前記検出器で検出された強度分布に基づいて前記回折格子および前記遮蔽格子のうち少なくともいずれか一方の光軸に対する傾きを調整することを特徴とする撮像装置。
【請求項11】
電磁波源からの電磁波を回折する回折格子と、
前記回折格子によって回折された前記電磁波の一部を遮る遮蔽格子と、
前記遮蔽格子を経た前記電磁波の強度分布を検出する検出器と、を有する撮像装置に用いられ、
前記検出器で検出された強度分布に基づいて前記回折格子および前記遮蔽格子のうち少なくともいずれか一方の光軸に対する傾きを調整する調整方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図8】
【図10】
【図7】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図8】
【図10】
【図7】
【図9】
【公開番号】特開2012−108098(P2012−108098A)
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願番号】特願2011−172973(P2011−172973)
【出願日】平成23年8月8日(2011.8.8)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願日】平成23年8月8日(2011.8.8)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]