
ドア取り外しシステムおよびドア取り外し方法
【課題】ドアをボディから確実に取り外しできるドア取り外しシステムを提供すること。
【解決手段】ドア取り外しシステムは、自動車のボディ10にボルト12で固定されたドア11を、このボディ10から取り外す。このドア取り外しシステムは、ドア11を把持して搬送可能な双腕ロボットと、ナットランナ71と、双腕ロボットおよびナットランナ71を制御する制御装置と、を備える。制御装置は、双腕ロボットによりドア11を把持し、ナットランナ71のソケットをボルト12に嵌合して、ナットランナ本体によりソケットを所定回転数だけ回転させ、ソケットの後退距離xを測定し、この測定した後退距離xが所定距離以上である場合には、ボルト12が外れたと判定する。
【解決手段】ドア取り外しシステムは、自動車のボディ10にボルト12で固定されたドア11を、このボディ10から取り外す。このドア取り外しシステムは、ドア11を把持して搬送可能な双腕ロボットと、ナットランナ71と、双腕ロボットおよびナットランナ71を制御する制御装置と、を備える。制御装置は、双腕ロボットによりドア11を把持し、ナットランナ71のソケットをボルト12に嵌合して、ナットランナ本体によりソケットを所定回転数だけ回転させ、ソケットの後退距離xを測定し、この測定した後退距離xが所定距離以上である場合には、ボルト12が外れたと判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ドア取り外しシステムおよびドア取り外し方法に関する。詳しくは、自動車のボディからドアを取り外す、ドア取り外しシステムおよびドア取り外し方法に関する。
【背景技術】
【0002】
従来より、自動車の製造工程では、ボディにボルトでドアを仮固定しておき、この状態で塗装を行っている。その後、このボルトを取り外し、ドアを把持して搬送することで、ドアをボディから取り外し、ボディとドアとを別々のラインで組み立てる。
ここで、ドアをボディから取り外すラインでは、例えば、ボディの両側に位置しナットランナを備えた2台の第1ロボットと、ボディの両側に位置しドアを把持する2台の第2ロボットと、を備えるドア取り外し装置が用いられる(特許文献1参照)。このドア取り外し装置では、ドアを開いた状態で、第1ロボットのナットランナでボルト緩めてドアとボディとの連結を解除し、その後、第2ロボットでドアを把持して、ドアを搬送する。
【特許文献1】特開平9−103925号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、ナットランナでトルクを管理しつつボルトを緩めても、ドアとボディとの連結を確実に解除できない場合がある。この場合、ドアを搬送しようとして、ドアをボディから引き離すと、ドアやボディを損傷させてしまう場合がある。
【0004】
本発明は、ドアをボディから確実に取り外しできるドア取り外しシステムおよびドア取り外し方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明のドア取り外しシステム(例えば、後述のドア取り外しシステム1)は、自動車のボディ(例えば、後述のボディ10)にボルト(例えば、後述のボルト12)で固定されたドア(例えば、後述のドア11)を、当該ボディから取り外すドア取り外しシステムであって、前記ドアを把持して搬送可能なロボット(例えば、後述の双腕ロボット20)と、前記ボルトに嵌合可能なソケット(例えば、後述のソケット711)および当該ソケットを回転させる回転手段(例えば、後述のナットランナ本体712)を有するナットランナ(例えば、後述のナットランナ71)と、前記ソケットの軸方向の移動距離を検出する移動距離検出手段(例えば、後述のエンコーダ34およびボルト取り外し部43)と、前記ロボットおよび前記ナットランナを制御する制御手段(例えば、後述の制御装置40)と、を備え、当該制御手段は、前記ロボットにより前記ドアを把持し、前記ソケットを前記ボルトに嵌合して、前記回転手段により前記ボルトを緩める方向に当該ソケットを所定回転数だけ回転させ、前記ボルトの回転による前記ソケットの後退距離を前記移動距離検出手段により測定し、当該測定した後退距離が所定距離以上である場合には、前記ボルトが外れたと判定することを特徴とする。
【0006】
本発明のドア取り外し方法は、自動車のボディにボルトで固定されたドアを、当該ボディから取り外すドア取り外し方法であって、ロボットにより前記ドアを把持する手順と、前記ソケットを前記ボルトに嵌合する手順と、前記ボルトを緩める方向に当該ソケットを所定回転数だけ回転させる手順と、前記ボルトの回転による前記ソケットの後退距離を測定する手順と、当該測定した後退距離が所定距離以上である場合には、前記ボルトが外れたと判定する手順と、を備えることを特徴とする。
【0007】
この発明によれば、ソケットをボルトに嵌合して、回転手段によりボルトを緩める方向にソケットを所定回転数だけ回転させる。次に、ボルトの回転によるソケットの後退距離を移動距離検出手段により測定し、この測定した後退距離が所定距離以上である場合には、ボルトが外れたと判定する。このようにボルトの回転による後退距離に基づいて、ボルトが外れたか否かを判定したので、ドアとボディとの連結を確実に解除でき、ドアをボディから確実に取り外しできる。
【発明の効果】
【0008】
本発明によれば、ソケットをボルトに嵌合して、回転手段によりボルトを緩める方向にソケットを所定回転数だけ回転させる。次に、ボルトの回転によるソケットの後退距離を移動距離検出手段により測定し、この測定した後退距離が所定距離以上である場合には、ボルトが外れたと判定する。このようにボルトの回転による後退距離に基づいて、ボルトが外れたか否かを判定したので、ドアとボディとの連結を確実に解除でき、ドアをボディから確実に取り外しできる。
【発明を実施するための最良の形態】
【0009】
以下、本発明の一実施形態を図面に基づいて説明する。
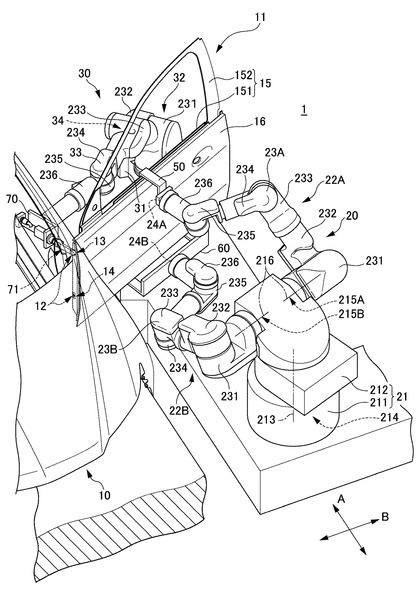
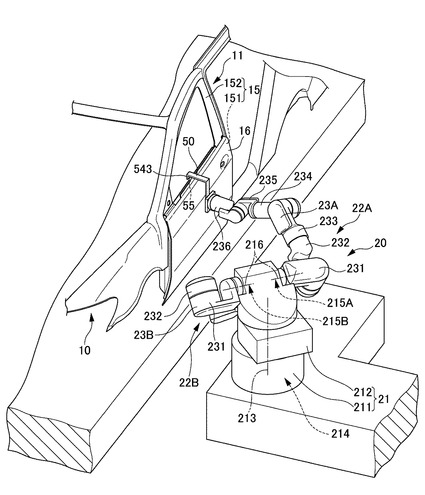
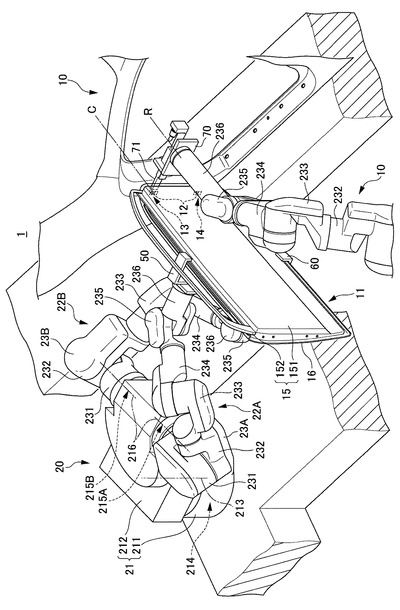
図1は、本発明の一実施形態に係るドア取り外しシステム1の斜視図である。
ドア取り外しシステム1は、自動車のボディ10にボルト12で仮固定されたドア11を、このボディ10から取り外すものである。このドア取り外しシステム1は、ドア11を上下から挟持する双腕ロボット20と、ボルト12を取り外す単腕ロボット30と、これらを制御する制御手段としての制御装置40(図4参照)と、を備える。
【0010】
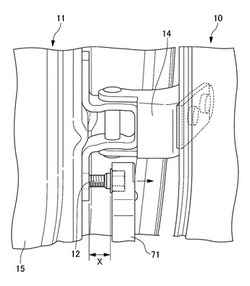
自動車のボディ10には、上下一対のヒンジ部材13、14を介して、ドア11が取り付けられる。
一対のヒンジ部材13、14は、それぞれ、ボディ10に固定されるとともに、1本のボルト12でドア11の長さ方向一端側の端面に仮固定されている。
このドア11は、インナパネル15とアウタパネル16とを接合して形成される。
インナパネル15は、略平板矩形状のパネル本体151と、このパネル本体151の上端に設けられた略コの字形状のフレーム部152と、を備える。フレーム部152とパネル本体151の上辺とで囲まれた領域は、図示しない窓ガラスが露出する開口となっている。
アウタパネル16は、インナパネル15のパネル本体151の外側に取り付けられる。アウタパネル16の上辺とインナパネル15のパネル本体151の上辺との間には、窓ガラスを収容するための隙間が形成されている。
【0011】
双腕ロボット20は、ロボット本体21と、このロボット本体21を挟んで設けられた第1マニピュレータ22Aおよび第2マニピュレータ22Bと、を備える。
マニピュレータ22A、22Bは、7軸であり、ロボット本体21に軸支されるアーム23A、23Bと、これらアーム23A、23Bの先端フランジ面24A、24Bに軸支された第1把持治具50および第2把持治具60と、を備える。
【0012】
ロボット本体21は、床面に対して所定方向にスライド可能なスライド部211と、このスライド部211に略鉛直方向を旋回軸213として旋回可能な旋回部212とを備える。
【0013】
スライド部211は、自動車のボディ10の搬送方向すなわち図1中矢印A方向と、この自動車のボディ10の搬送方向に交差する方向すなわち図1中矢印B方向と、にスライド可能となっている。
このスライド部211には、この旋回軸213に作用するトルクを検出するトルクセンサ214が設けられている。トルクセンサ214は、具体的には、旋回軸213に作用するトルクを検出する。
【0014】
アーム23A、23Bは、ロボット本体21側から順に、第1腕部231、第2腕部232、第3腕部233、第4腕部234、第5腕部235、および、第6腕部236を備える。
【0015】
第1腕部231は、略直線状に延出しており、ロボット本体21の旋回部212に軸支される。ロボット本体21は、略水平方向に延びる回転軸216を回転中心として、第1腕部231を回転させる。
アーム23Aの第1腕部231の回転軸216と、アーム23Bの第1腕部231の回転軸216とは、同一直線上に位置している。
【0016】
旋回部212には、回転軸216に作用するトルクを検出することで、マニピュレータ22A、22Bに鉛直方向に作用する荷重を検出する荷重センサ215A、215Bが設けられている。
【0017】
第2腕部232は、略直線状に延出しており、第1腕部231に軸支される。第1腕部231は、図示しない駆動機構により、第1腕部231の延出方向に交差する方向を回転中心として、第2腕部232を回転させる。これにより、第1腕部231の延出方向と第2腕部232の延出方向との成す角度が変化する。
第3腕部233は、略直線状に延出しており、第2腕部232に軸支される。第2腕部232は、図示しない駆動機構により、第2腕部232の延出方向を回転中心として、第3腕部233を回転させる。
【0018】
第4腕部234は、略直線状に延出しており、第3腕部233に軸支される。第3腕部233は、図示しない駆動機構により、第3腕部233の延出方向に交差する方向を回転中心として、第4腕部234を回転させる。これにより、第3腕部233の延出方向と第4腕部234の延出方向との成す角度が変化する。
第5腕部235は、略直線状に延出しており、第4腕部234に軸支される。第4腕部234は、図示しない駆動機構により、第4腕部234の延出方向を回転中心として、第5腕部235を回転させる。
【0019】
第6腕部236は、略直線状に延出しており、第5腕部235に軸支される。第5腕部235は、図示しない駆動機構により、第5腕部235の延出方向に交差する方向を回転中心として、第6腕部236を回転させる。これにより、第5腕部235の延出方向と第6腕部236の延出方向との成す角度が変化する。
【0020】
第1把持治具50および第2把持治具60は、アーム23A、23Bの先端フランジ面24A、24Bで第6腕部236に軸支される。第6腕部236は、図示しない駆動機構により、第6腕部236の延出方向を回転中心として、第1把持治具50および第2把持治具60を回転させる。
【0021】
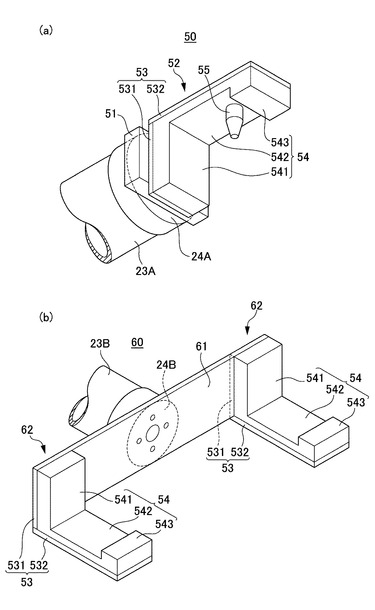
図2(a)は、第1把持治具50の斜視図である。
第1把持治具50は、アーム23Aの先端フランジ面24Aに取り付けられた支持部51と、この支持部51に支持される略コの字形状の係止部52と、図示しないレーザ測定装置と、を備える。
【0022】
係止部52は、アーム23Aの先端フランジ面24Aに取り付けられたフレーム53と、このフレーム53の表面に設けられたウレタン製の緩衝部54と、フレーム53に設けられて緩衝部54から突出するドア開けピン55と、を備える。
【0023】
フレーム53は、略L字形状であり、先端フランジ面24Aに略平行に延出する板状の第1フレーム531と、この第1フレーム531の一端側に設けられて第1フレーム531に対して略直交方向に延出する板状の第2フレーム532と、を備える。
【0024】
緩衝部54は、第1フレーム531の内側の表面に沿って設けられた第1緩衝部541と、第2フレーム532の内側の表面に沿って設けられた第2緩衝部542と、この第2緩衝部542の先端側に設けられて第1緩衝部541に対向するように延出する第3緩衝部543と、を備える。
ドア開けピン55は、第2フレーム532に設けられ、第2緩衝部542の表面から突出している。
【0025】
図2(b)は、第2把持治具60の斜視図である。
第2把持治具60は、アーム23Bの先端フランジ面24Bに取り付けられた支持部61と、この支持部61の両端側に支持された互いに略平行な一対の略L字形状の係止部62と、を備える。
この係止部62は、それぞれ、第1把持治具50の係止部52と同様の構成であるが、ドア開けピンが設けられていない点が異なる。
【0026】
図1に戻って、単腕ロボット30は、ロボット本体31と、このロボット本体31に設けられた1本のマニピュレータ32と、を備える。
マニピュレータ32は、7軸であり、ロボット本体31に設けられたアーム33と、このアーム33の先端にナットランナ支持具70を介して支持されたナットランナ71と、を備える。
単腕ロボット30のロボット本体31およびアーム33は、双腕ロボット20のロボット本体31およびアーム23A、23Bと同様の構成であるが、単腕ロボット30のスライド部211は、図1中矢印A方向にのみスライド可能である点が、双腕ロボット20のスライド部211と異なる。
【0027】
また、アーム33には、旋回部212と第1腕部231との成す角度、第1腕部231と第2腕部232との成す角度、第2腕部232と第3腕部233との成す角度、第3腕部233と第4腕部234との成す角度、第4腕部234と第5腕部235との成す角度、第5腕部235と第6腕部236との成す角度、第6腕部236とナットランナ71との成す角度、を検出するエンコーダ34が内蔵されている。
【0028】
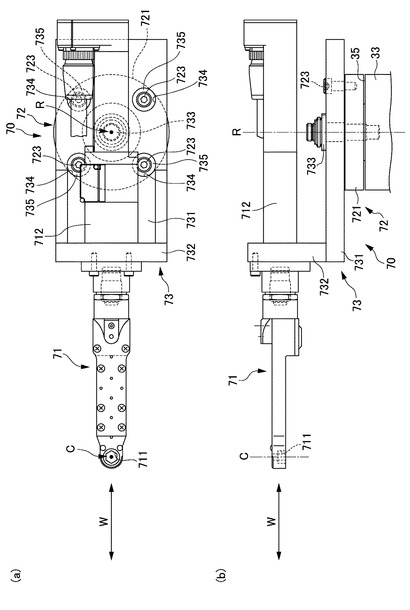
図3は、ナットランナ71およびナットランナ支持具70の平面図および側面図である。
ナットランナ71は、ソケット711と、このソケット711を回転駆動する回転手段としてのナットランナ本体712と、を有する。
ソケット711は、ナットランナ本体712の先端側に設けられ、ソケット711の回転軸Cは、ナットランナ本体712の延出方向に交差している。
【0029】
ナットランナ支持具70は、アーム33の先端フランジ面35に取り付けられた基部72と、この基部72に回動可能に支持されてナットランナ71を支持するフレーム73と、を備える。
【0030】
基部72は、先端フランジ面35に沿って延出する円盤状の本体721と、本体721から突出する4つのボルト723と、を備える。
4つのボルト723は、本体721に螺合されており、軸部722を中心として環状に配置されている。
【0031】
フレーム73は、中心軸Rを回転中心として基部72に回転可能に支持される。このフレーム73は、断面略L字形状であり、先端フランジ面35に沿って延出する平板状の第1フレーム731と、この第1フレーム731に立設された平板状の第2フレーム732と、第1フレーム731を貫通して固定された軸部733と、を備える。
【0032】
第1フレーム731には、基部72のボルト723が収容される4つの収容部734が形成されている。
【0033】
各収容部734の内壁面には、ボルト723の首部を囲んで配置される筒状の緩衝材735が配置されている。緩衝材735は、弾性変形可能なウレタン製であり、収容部734の内壁面とボルト723の首部の外周面との間に介装されることになる。
【0034】
第2フレーム732は、ナットランナ71が先端フランジ面35に沿って延出するように、ナットランナ本体712を支持している。これにより、ナットランナ71のソケット711の回転軸Cは、アーム33の先端フランジ面35の中心軸Rと略平行となっている。
【0035】
以上のナットランナ支持具70は、以下のように動作する。
上述のように、フレーム73は、中心軸Rを回転中心として基部72に対して回転可能である。しかしながら、基部72のボルト723がフレーム73の収容部734に収容されているので、フレーム73の基部72に対する回転は、ボルト723により規制される。
【0036】
ここで、ボルト723と収容部734との間には緩衝材735が設けられているため、フレーム73を基部72に対して回転させると、緩衝材735は、収容部734の内壁面とボルト723の首部の外周面とで押圧されて弾性変形する。よって、フレーム73の基部72に対する回転量は、緩衝材735の弾性変形量に等しくなる。
ナットランナ71のソケット711の回転軸Cは、先端フランジ面35の中心軸Rと平行であるので、ソケット711は、アーム33の先端フランジ面35に対して僅かに回転することになる。
【0037】
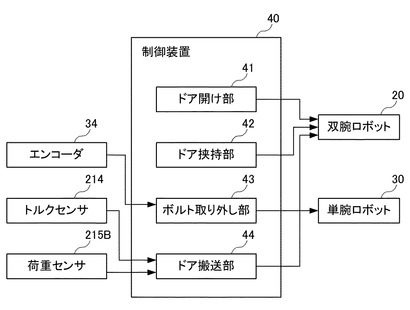
図4は、制御装置40の概略構成を示すブロック図である。
制御装置40は、双腕ロボット20のマニピュレータ22Aでドア11を開けるドア開け部41と、双腕ロボット20のマニピュレータ22A、22Bでドア11を上下から挟持するドア挟持部42と、単腕ロボット30でボルト12を取り外すボルト取り外し部43と、双腕ロボット20でドア11を搬送するドア搬送部44と、を備える。
【0038】
ドア開け部41は、マニピュレータ22Aの第1把持治具50のドア開けピン55を、ドア11のアウタパネル16とインナパネル15との隙間に挿入して、このドア11をボディ10の外側に向かって引くことで、ドア11が開く。
【0039】
ドア挟持部42は、マニピュレータ22Aの第1把持治具50と、マニピュレータ22Bの第2把持治具60とで、ドア11を上下から挟持する。ドア11を挟持する際、図示しない力覚センサによりマニピュレータ22A、22Bに作用する反力を検出し、この検出した反力に基づいて、マニピュレータ22A、22Bをフィードバック制御する。
【0040】
ボルト取り外し部43は、単腕ロボット30を制御して、ボルト12にナットランナ71のソケット711を嵌合し、このナットランナ71を駆動することで、ボルト12を取り外す。ここで、ボルト取り外し部43は、上下一対のボルト12のうち、上側のボルト12を緩めて取り外した後、下側のボルト12を緩めて取り外す。
【0041】
ボルト12を取り外す際、ボルト取り外し部43は、ナットランナ71のソケット711をボルト12に嵌合して、回転させる。このとき、ボルト取り外し部43は、アーム33を制御して、ナットランナ71をソケット711の回転軸に沿った方向にのみ移動自在とするとともに、アーム33に内蔵されたエンコーダ34の出力信号に基づいて、このソケット711の移動距離を算出可能となっている。
【0042】
よって、ボルト12を取り外す手順は、具体的には、以下のようになる。
まず、ナットランナ71のソケット711をボルト12に嵌合し、図示しない力覚センサにより、ボルト12とソケット711との嵌合を検出する。次に、ナットランナ71を駆動して、ボルト12を緩める方向にソケット711を所定回転数だけ回転させる。
【0043】
すると、このボルト12はドア11の表面から突出する方向に移動し、このボルト12の移動に伴って、ソケット711は、回転軸に沿った方向に後退する。
次に、ボルト取り外し部43により、ボルト12の回転によるソケット711の後退距離を算出し、この算出した後退距離が所定距離以上である場合には、ボルト12が外れたと判定する。ここで、所定距離とは、ボルト12の首部に形成されたねじ山数に基づいて算出され、ボルトを締付けた状態からボルトを完全に取り外した状態に至るまでの距離である。
【0044】
ドア搬送部44は、荷重センサ215Bにより、一対のマニピュレータ22A、22Bのうちドア11の下側を支持する方、ここではマニピュレータ22Bにかかる荷重を検出する。
具体的には、マニピュレータ22Bについて回転軸216以外の回転軸をロックしておき、荷重センサ215Bにより、マニピュレータ22Bの回転軸216を駆動するモータに作用するトルクを検出する。なお、本実施形態では、荷重センサ215Bにより回転軸216に作用するトルクを検出したが、これに限らず、回転軸216を駆動するモータの電流値に基づいて、この回転軸216に作用するトルクを算出してもよい。
そして、この検出した荷重が所定値以上である場合にのみ、ロボット本体21の旋回軸213の旋回を開始して、一対のマニピュレータ22A、22Bでドア11の搬送を開始する。
【0045】
また、双腕ロボット20の旋回軸213を旋回させる際、トルクセンサ214により旋回軸213に作用するトルクを検出し、この検出したトルクが所定値以上である場合には、双腕ロボット20の旋回を停止する。なお、本実施形態では、トルクセンサにより旋回軸213に作用するトルクを検出したが、これに限らず、旋回軸213を駆動するモータの電流値に基づいて、この旋回軸213に作用するトルクを算出してもよい。
【0046】
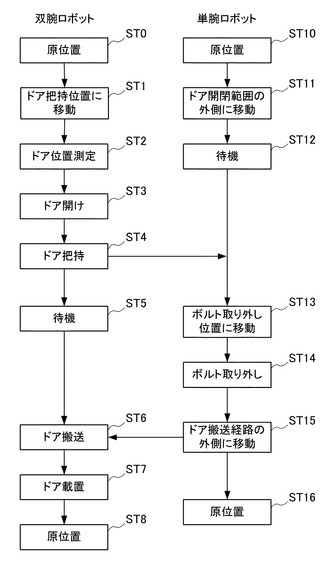
以下、ドア取り外しシステム1の動作について、図5のフローチャートを参照しながら説明する。
まず、ボディ10がライン上を搬送され、ドア取り外しシステム1に供給される。この状態では、ドア11は閉じた状態である。
【0047】
まず、ST10では、単腕ロボット30は、原位置に位置している。
ST11では、単腕ロボット30のスライド部211をスライドさせて、ドア11の開閉範囲の外側にマニピュレータ32を移動させ、ST12では、この単腕ロボット30を待機させる。
【0048】
一方、ST0では、双腕ロボット20は、原位置に位置している。
ST1では、双腕ロボット20のスライド部211をスライドさせて、ドア11を把持する位置にマニピュレータ22A、22Bを移動させる。
ST2では、双腕ロボット20の第1マニピュレータ22Aに設けられた図示しないレーザ測定装置により、ドア11の位置を測定する。
【0049】
ST3では、測定したドアの位置に基づいて、予めティーチングされた動作を補正して、双腕ロボット20の第1マニピュレータ22Aによりドア11を開ける。
具体的には、図6に示すように、第1マニピュレータ22Aを駆動して、第1把持治具50のドア開けピン55を、ドア11のアウタパネル16の上辺とインナパネル15のパネル本体151の上辺との隙間に挿入するとともに、係止部52の第3緩衝部543をインナパネル15のパネル本体151の上辺に係止させて、このドア11をボディ10の外側に向かって引く。すると、ドア11が開いて、ドア11の下辺が露出する。
【0050】
ST4では、測定したドア11の位置に基づいて、双腕ロボット20の第1マニピュレータ22Aおよび第2マニピュレータ22Bにより、ドア11を把持する。
具体的には、図7に示すように、第2マニピュレータ22Bを駆動して、第2把持治具60の係止部62の第3緩衝部543をドア11の下辺に係止させるとともに、係止部62の第2緩衝部542でドア11の下辺を支持する。この状態では、第1把持治具50の緩衝部54と、第2把持治具60の緩衝部54とは、ドア11を上下に挟んで互いに対向した状態である。この状態から、第1把持治具50と第2把持治具60とを接近させることで、第1マニピュレータ22Aおよび第2マニピュレータ22Bによりドア11を挟持する。
【0051】
ST5では、双腕ロボット20の第1マニピュレータ22Aおよび第2マニピュレータ22Bによりドア11を把持した状態で、この双腕ロボット20を待機させる。
【0052】
一方、ST13では、双腕ロボット20によりドア11が把持された後、単腕ロボット30のスライド部211をスライドさせて、ボルト12を緩める位置にマニピュレータ32を移動させる。
【0053】
ST14では、測定したドア11の位置に基づいて、図8に示すように、ナットランナ71のソケットをヒンジ部材13、14のボルト12に嵌合させ、ナットランナ71を駆動して、上下のボルト12を緩めて取り外す。ここで、上側のヒンジ部材13のボルト12、下側のヒンジ部材14のボルト12の順に取り外す。
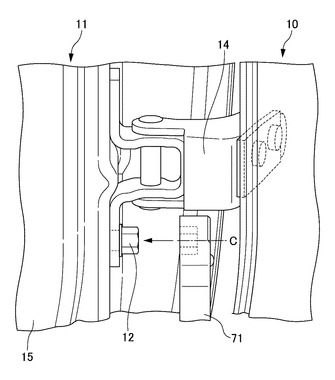
【0054】
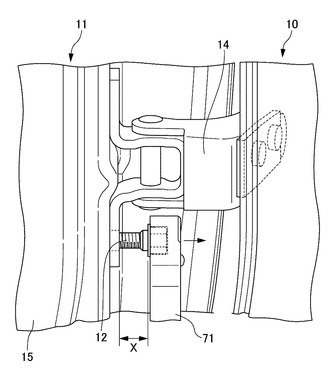
具体的には、図9に示すように、まず、ナットランナ71のソケット711をボルト12に嵌合させる。次に、ナットランナ71を駆動して、ボルト12を緩める方向にソケット711を所定回転数だけ回転させる。すると、図10に示すように、ボルト12の回転により、ソケット711は距離xだけ後退する。この後退距離xが所定距離以上である場合、ボルト12が外れたと判定して、ST15に移る。
【0055】
ST15では、双腕ロボット20によるドア11の搬送経路の外側に、単腕ロボット30のマニピュレータ32を移動させ、ST16では、単腕ロボット30のスライド部211をスライドさせて、原位置に戻る。
【0056】
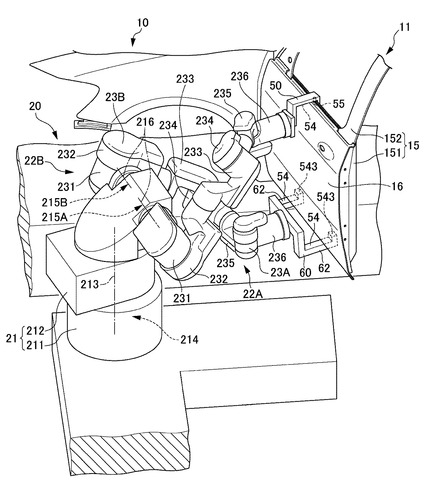
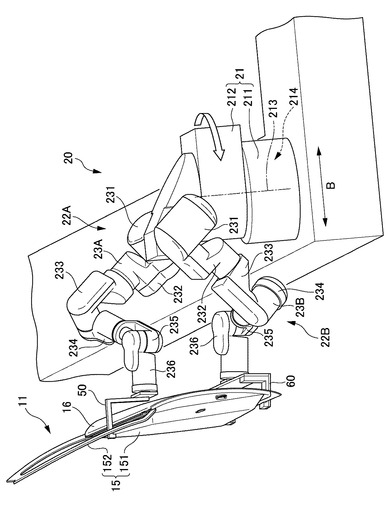
一方、ST6では、図11に示すように、双腕ロボット20の旋回軸213を旋回させるとともに、双腕ロボット20のスライド部211を図11中矢印方向Bにスライドさせて、双腕ロボット20によりドア11を搬送する。
ここで、双腕ロボット20の旋回動作を開始する際、まず、荷重センサ215Bにより第2マニピュレータ22Bに作用する荷重を検出するとともに、トルクセンサ214により旋回軸213に作用するトルクを検出する。検出した荷重が所定値以上であり、かつ、検出したトルクが所定値未満である場合にのみ、双腕ロボット20を旋回させる。
【0057】
ST7では、双腕ロボット20によりこのドア11をパレットに載置し、ST8では、双腕ロボット20のスライド部211をスライドさせて、原位置に戻る。
【0058】
本実施形態によれば、以下のような効果がある。
(1)ソケット711をボルト12に嵌合して、ナットランナ本体712によりボルト12を緩める方向にソケット711を所定回転数だけ回転させる。次に、ボルト12の回転によるソケット711の後退距離xをエンコーダ34により測定し、この測定した後退距離xが所定距離以上である場合には、ボルト12が外れたと判定する。このようにボルト12の回転による後退距離xに基づいて、ボルト12が外れたか否かを判定したので、ドア11とボディ10との連結を確実に解除でき、ドア11をボディ10から確実に取り外しできる。
【0059】
なお、本発明は前記実施形態に限定されるものではなく、本発明の目的を達成できる範囲での変形、改良等は本発明に含まれるものである。
【図面の簡単な説明】
【0060】
【図1】本発明の一実施形態に係るドア取り外しシステムの斜視図である。
【図2】前記実施形態に係るドア取り外しシステムの第1把持治具および第2把持治具の斜視図である。
【図3】前記実施形態に係るドア取り外しシステムのナットランナおよびナットランナ支持具の平面図および側面図である。
【図4】前記実施形態に係るドア取り外しシステムの制御手段の概略構成を示すブロック図である。
【図5】前記実施形態に係るドア取り外しシステムの動作のフローチャートである。
【図6】前記実施形態に係るドア取り外しシステムの第1把持治具をドアに係止した状態を示す斜視図である。
【図7】前記実施形態に係るドア取り外しシステムの双腕ロボットでドアを把持した状態を示す斜視図である。
【図8】前記実施形態に係るドア取り外しシステムの単腕ロボットでボルトを取り外している状態を示す斜視図である。
【図9】前記実施形態に係るドア取り外しシステムの単腕ロボットで上側のヒンジ部材のボルトを取り外している状態を示す斜視図である。
【図10】前記実施形態に係るドア取り外しシステムの単腕ロボットで下側のヒンジ部材のボルトを取り外している状態を示す斜視図である。
【図11】前記実施形態に係るドア取り外しシステムの双腕ロボットでドアを搬送している状態を示す斜視図である。
【符号の説明】
【0061】
1 ドア取り外しシステム
10 ボディ
11 ドア
12 ボルト
20 双腕ロボット
40 制御装置(制御手段)
71 ナットランナ
711 ソケット
712 ナットランナ本体(回転手段)
34 エンコーダ(移動距離検出手段)
【技術分野】
【0001】
本発明は、ドア取り外しシステムおよびドア取り外し方法に関する。詳しくは、自動車のボディからドアを取り外す、ドア取り外しシステムおよびドア取り外し方法に関する。
【背景技術】
【0002】
従来より、自動車の製造工程では、ボディにボルトでドアを仮固定しておき、この状態で塗装を行っている。その後、このボルトを取り外し、ドアを把持して搬送することで、ドアをボディから取り外し、ボディとドアとを別々のラインで組み立てる。
ここで、ドアをボディから取り外すラインでは、例えば、ボディの両側に位置しナットランナを備えた2台の第1ロボットと、ボディの両側に位置しドアを把持する2台の第2ロボットと、を備えるドア取り外し装置が用いられる(特許文献1参照)。このドア取り外し装置では、ドアを開いた状態で、第1ロボットのナットランナでボルト緩めてドアとボディとの連結を解除し、その後、第2ロボットでドアを把持して、ドアを搬送する。
【特許文献1】特開平9−103925号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、ナットランナでトルクを管理しつつボルトを緩めても、ドアとボディとの連結を確実に解除できない場合がある。この場合、ドアを搬送しようとして、ドアをボディから引き離すと、ドアやボディを損傷させてしまう場合がある。
【0004】
本発明は、ドアをボディから確実に取り外しできるドア取り外しシステムおよびドア取り外し方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明のドア取り外しシステム(例えば、後述のドア取り外しシステム1)は、自動車のボディ(例えば、後述のボディ10)にボルト(例えば、後述のボルト12)で固定されたドア(例えば、後述のドア11)を、当該ボディから取り外すドア取り外しシステムであって、前記ドアを把持して搬送可能なロボット(例えば、後述の双腕ロボット20)と、前記ボルトに嵌合可能なソケット(例えば、後述のソケット711)および当該ソケットを回転させる回転手段(例えば、後述のナットランナ本体712)を有するナットランナ(例えば、後述のナットランナ71)と、前記ソケットの軸方向の移動距離を検出する移動距離検出手段(例えば、後述のエンコーダ34およびボルト取り外し部43)と、前記ロボットおよび前記ナットランナを制御する制御手段(例えば、後述の制御装置40)と、を備え、当該制御手段は、前記ロボットにより前記ドアを把持し、前記ソケットを前記ボルトに嵌合して、前記回転手段により前記ボルトを緩める方向に当該ソケットを所定回転数だけ回転させ、前記ボルトの回転による前記ソケットの後退距離を前記移動距離検出手段により測定し、当該測定した後退距離が所定距離以上である場合には、前記ボルトが外れたと判定することを特徴とする。
【0006】
本発明のドア取り外し方法は、自動車のボディにボルトで固定されたドアを、当該ボディから取り外すドア取り外し方法であって、ロボットにより前記ドアを把持する手順と、前記ソケットを前記ボルトに嵌合する手順と、前記ボルトを緩める方向に当該ソケットを所定回転数だけ回転させる手順と、前記ボルトの回転による前記ソケットの後退距離を測定する手順と、当該測定した後退距離が所定距離以上である場合には、前記ボルトが外れたと判定する手順と、を備えることを特徴とする。
【0007】
この発明によれば、ソケットをボルトに嵌合して、回転手段によりボルトを緩める方向にソケットを所定回転数だけ回転させる。次に、ボルトの回転によるソケットの後退距離を移動距離検出手段により測定し、この測定した後退距離が所定距離以上である場合には、ボルトが外れたと判定する。このようにボルトの回転による後退距離に基づいて、ボルトが外れたか否かを判定したので、ドアとボディとの連結を確実に解除でき、ドアをボディから確実に取り外しできる。
【発明の効果】
【0008】
本発明によれば、ソケットをボルトに嵌合して、回転手段によりボルトを緩める方向にソケットを所定回転数だけ回転させる。次に、ボルトの回転によるソケットの後退距離を移動距離検出手段により測定し、この測定した後退距離が所定距離以上である場合には、ボルトが外れたと判定する。このようにボルトの回転による後退距離に基づいて、ボルトが外れたか否かを判定したので、ドアとボディとの連結を確実に解除でき、ドアをボディから確実に取り外しできる。
【発明を実施するための最良の形態】
【0009】
以下、本発明の一実施形態を図面に基づいて説明する。
図1は、本発明の一実施形態に係るドア取り外しシステム1の斜視図である。
ドア取り外しシステム1は、自動車のボディ10にボルト12で仮固定されたドア11を、このボディ10から取り外すものである。このドア取り外しシステム1は、ドア11を上下から挟持する双腕ロボット20と、ボルト12を取り外す単腕ロボット30と、これらを制御する制御手段としての制御装置40(図4参照)と、を備える。
【0010】
自動車のボディ10には、上下一対のヒンジ部材13、14を介して、ドア11が取り付けられる。
一対のヒンジ部材13、14は、それぞれ、ボディ10に固定されるとともに、1本のボルト12でドア11の長さ方向一端側の端面に仮固定されている。
このドア11は、インナパネル15とアウタパネル16とを接合して形成される。
インナパネル15は、略平板矩形状のパネル本体151と、このパネル本体151の上端に設けられた略コの字形状のフレーム部152と、を備える。フレーム部152とパネル本体151の上辺とで囲まれた領域は、図示しない窓ガラスが露出する開口となっている。
アウタパネル16は、インナパネル15のパネル本体151の外側に取り付けられる。アウタパネル16の上辺とインナパネル15のパネル本体151の上辺との間には、窓ガラスを収容するための隙間が形成されている。
【0011】
双腕ロボット20は、ロボット本体21と、このロボット本体21を挟んで設けられた第1マニピュレータ22Aおよび第2マニピュレータ22Bと、を備える。
マニピュレータ22A、22Bは、7軸であり、ロボット本体21に軸支されるアーム23A、23Bと、これらアーム23A、23Bの先端フランジ面24A、24Bに軸支された第1把持治具50および第2把持治具60と、を備える。
【0012】
ロボット本体21は、床面に対して所定方向にスライド可能なスライド部211と、このスライド部211に略鉛直方向を旋回軸213として旋回可能な旋回部212とを備える。
【0013】
スライド部211は、自動車のボディ10の搬送方向すなわち図1中矢印A方向と、この自動車のボディ10の搬送方向に交差する方向すなわち図1中矢印B方向と、にスライド可能となっている。
このスライド部211には、この旋回軸213に作用するトルクを検出するトルクセンサ214が設けられている。トルクセンサ214は、具体的には、旋回軸213に作用するトルクを検出する。
【0014】
アーム23A、23Bは、ロボット本体21側から順に、第1腕部231、第2腕部232、第3腕部233、第4腕部234、第5腕部235、および、第6腕部236を備える。
【0015】
第1腕部231は、略直線状に延出しており、ロボット本体21の旋回部212に軸支される。ロボット本体21は、略水平方向に延びる回転軸216を回転中心として、第1腕部231を回転させる。
アーム23Aの第1腕部231の回転軸216と、アーム23Bの第1腕部231の回転軸216とは、同一直線上に位置している。
【0016】
旋回部212には、回転軸216に作用するトルクを検出することで、マニピュレータ22A、22Bに鉛直方向に作用する荷重を検出する荷重センサ215A、215Bが設けられている。
【0017】
第2腕部232は、略直線状に延出しており、第1腕部231に軸支される。第1腕部231は、図示しない駆動機構により、第1腕部231の延出方向に交差する方向を回転中心として、第2腕部232を回転させる。これにより、第1腕部231の延出方向と第2腕部232の延出方向との成す角度が変化する。
第3腕部233は、略直線状に延出しており、第2腕部232に軸支される。第2腕部232は、図示しない駆動機構により、第2腕部232の延出方向を回転中心として、第3腕部233を回転させる。
【0018】
第4腕部234は、略直線状に延出しており、第3腕部233に軸支される。第3腕部233は、図示しない駆動機構により、第3腕部233の延出方向に交差する方向を回転中心として、第4腕部234を回転させる。これにより、第3腕部233の延出方向と第4腕部234の延出方向との成す角度が変化する。
第5腕部235は、略直線状に延出しており、第4腕部234に軸支される。第4腕部234は、図示しない駆動機構により、第4腕部234の延出方向を回転中心として、第5腕部235を回転させる。
【0019】
第6腕部236は、略直線状に延出しており、第5腕部235に軸支される。第5腕部235は、図示しない駆動機構により、第5腕部235の延出方向に交差する方向を回転中心として、第6腕部236を回転させる。これにより、第5腕部235の延出方向と第6腕部236の延出方向との成す角度が変化する。
【0020】
第1把持治具50および第2把持治具60は、アーム23A、23Bの先端フランジ面24A、24Bで第6腕部236に軸支される。第6腕部236は、図示しない駆動機構により、第6腕部236の延出方向を回転中心として、第1把持治具50および第2把持治具60を回転させる。
【0021】
図2(a)は、第1把持治具50の斜視図である。
第1把持治具50は、アーム23Aの先端フランジ面24Aに取り付けられた支持部51と、この支持部51に支持される略コの字形状の係止部52と、図示しないレーザ測定装置と、を備える。
【0022】
係止部52は、アーム23Aの先端フランジ面24Aに取り付けられたフレーム53と、このフレーム53の表面に設けられたウレタン製の緩衝部54と、フレーム53に設けられて緩衝部54から突出するドア開けピン55と、を備える。
【0023】
フレーム53は、略L字形状であり、先端フランジ面24Aに略平行に延出する板状の第1フレーム531と、この第1フレーム531の一端側に設けられて第1フレーム531に対して略直交方向に延出する板状の第2フレーム532と、を備える。
【0024】
緩衝部54は、第1フレーム531の内側の表面に沿って設けられた第1緩衝部541と、第2フレーム532の内側の表面に沿って設けられた第2緩衝部542と、この第2緩衝部542の先端側に設けられて第1緩衝部541に対向するように延出する第3緩衝部543と、を備える。
ドア開けピン55は、第2フレーム532に設けられ、第2緩衝部542の表面から突出している。
【0025】
図2(b)は、第2把持治具60の斜視図である。
第2把持治具60は、アーム23Bの先端フランジ面24Bに取り付けられた支持部61と、この支持部61の両端側に支持された互いに略平行な一対の略L字形状の係止部62と、を備える。
この係止部62は、それぞれ、第1把持治具50の係止部52と同様の構成であるが、ドア開けピンが設けられていない点が異なる。
【0026】
図1に戻って、単腕ロボット30は、ロボット本体31と、このロボット本体31に設けられた1本のマニピュレータ32と、を備える。
マニピュレータ32は、7軸であり、ロボット本体31に設けられたアーム33と、このアーム33の先端にナットランナ支持具70を介して支持されたナットランナ71と、を備える。
単腕ロボット30のロボット本体31およびアーム33は、双腕ロボット20のロボット本体31およびアーム23A、23Bと同様の構成であるが、単腕ロボット30のスライド部211は、図1中矢印A方向にのみスライド可能である点が、双腕ロボット20のスライド部211と異なる。
【0027】
また、アーム33には、旋回部212と第1腕部231との成す角度、第1腕部231と第2腕部232との成す角度、第2腕部232と第3腕部233との成す角度、第3腕部233と第4腕部234との成す角度、第4腕部234と第5腕部235との成す角度、第5腕部235と第6腕部236との成す角度、第6腕部236とナットランナ71との成す角度、を検出するエンコーダ34が内蔵されている。
【0028】
図3は、ナットランナ71およびナットランナ支持具70の平面図および側面図である。
ナットランナ71は、ソケット711と、このソケット711を回転駆動する回転手段としてのナットランナ本体712と、を有する。
ソケット711は、ナットランナ本体712の先端側に設けられ、ソケット711の回転軸Cは、ナットランナ本体712の延出方向に交差している。
【0029】
ナットランナ支持具70は、アーム33の先端フランジ面35に取り付けられた基部72と、この基部72に回動可能に支持されてナットランナ71を支持するフレーム73と、を備える。
【0030】
基部72は、先端フランジ面35に沿って延出する円盤状の本体721と、本体721から突出する4つのボルト723と、を備える。
4つのボルト723は、本体721に螺合されており、軸部722を中心として環状に配置されている。
【0031】
フレーム73は、中心軸Rを回転中心として基部72に回転可能に支持される。このフレーム73は、断面略L字形状であり、先端フランジ面35に沿って延出する平板状の第1フレーム731と、この第1フレーム731に立設された平板状の第2フレーム732と、第1フレーム731を貫通して固定された軸部733と、を備える。
【0032】
第1フレーム731には、基部72のボルト723が収容される4つの収容部734が形成されている。
【0033】
各収容部734の内壁面には、ボルト723の首部を囲んで配置される筒状の緩衝材735が配置されている。緩衝材735は、弾性変形可能なウレタン製であり、収容部734の内壁面とボルト723の首部の外周面との間に介装されることになる。
【0034】
第2フレーム732は、ナットランナ71が先端フランジ面35に沿って延出するように、ナットランナ本体712を支持している。これにより、ナットランナ71のソケット711の回転軸Cは、アーム33の先端フランジ面35の中心軸Rと略平行となっている。
【0035】
以上のナットランナ支持具70は、以下のように動作する。
上述のように、フレーム73は、中心軸Rを回転中心として基部72に対して回転可能である。しかしながら、基部72のボルト723がフレーム73の収容部734に収容されているので、フレーム73の基部72に対する回転は、ボルト723により規制される。
【0036】
ここで、ボルト723と収容部734との間には緩衝材735が設けられているため、フレーム73を基部72に対して回転させると、緩衝材735は、収容部734の内壁面とボルト723の首部の外周面とで押圧されて弾性変形する。よって、フレーム73の基部72に対する回転量は、緩衝材735の弾性変形量に等しくなる。
ナットランナ71のソケット711の回転軸Cは、先端フランジ面35の中心軸Rと平行であるので、ソケット711は、アーム33の先端フランジ面35に対して僅かに回転することになる。
【0037】
図4は、制御装置40の概略構成を示すブロック図である。
制御装置40は、双腕ロボット20のマニピュレータ22Aでドア11を開けるドア開け部41と、双腕ロボット20のマニピュレータ22A、22Bでドア11を上下から挟持するドア挟持部42と、単腕ロボット30でボルト12を取り外すボルト取り外し部43と、双腕ロボット20でドア11を搬送するドア搬送部44と、を備える。
【0038】
ドア開け部41は、マニピュレータ22Aの第1把持治具50のドア開けピン55を、ドア11のアウタパネル16とインナパネル15との隙間に挿入して、このドア11をボディ10の外側に向かって引くことで、ドア11が開く。
【0039】
ドア挟持部42は、マニピュレータ22Aの第1把持治具50と、マニピュレータ22Bの第2把持治具60とで、ドア11を上下から挟持する。ドア11を挟持する際、図示しない力覚センサによりマニピュレータ22A、22Bに作用する反力を検出し、この検出した反力に基づいて、マニピュレータ22A、22Bをフィードバック制御する。
【0040】
ボルト取り外し部43は、単腕ロボット30を制御して、ボルト12にナットランナ71のソケット711を嵌合し、このナットランナ71を駆動することで、ボルト12を取り外す。ここで、ボルト取り外し部43は、上下一対のボルト12のうち、上側のボルト12を緩めて取り外した後、下側のボルト12を緩めて取り外す。
【0041】
ボルト12を取り外す際、ボルト取り外し部43は、ナットランナ71のソケット711をボルト12に嵌合して、回転させる。このとき、ボルト取り外し部43は、アーム33を制御して、ナットランナ71をソケット711の回転軸に沿った方向にのみ移動自在とするとともに、アーム33に内蔵されたエンコーダ34の出力信号に基づいて、このソケット711の移動距離を算出可能となっている。
【0042】
よって、ボルト12を取り外す手順は、具体的には、以下のようになる。
まず、ナットランナ71のソケット711をボルト12に嵌合し、図示しない力覚センサにより、ボルト12とソケット711との嵌合を検出する。次に、ナットランナ71を駆動して、ボルト12を緩める方向にソケット711を所定回転数だけ回転させる。
【0043】
すると、このボルト12はドア11の表面から突出する方向に移動し、このボルト12の移動に伴って、ソケット711は、回転軸に沿った方向に後退する。
次に、ボルト取り外し部43により、ボルト12の回転によるソケット711の後退距離を算出し、この算出した後退距離が所定距離以上である場合には、ボルト12が外れたと判定する。ここで、所定距離とは、ボルト12の首部に形成されたねじ山数に基づいて算出され、ボルトを締付けた状態からボルトを完全に取り外した状態に至るまでの距離である。
【0044】
ドア搬送部44は、荷重センサ215Bにより、一対のマニピュレータ22A、22Bのうちドア11の下側を支持する方、ここではマニピュレータ22Bにかかる荷重を検出する。
具体的には、マニピュレータ22Bについて回転軸216以外の回転軸をロックしておき、荷重センサ215Bにより、マニピュレータ22Bの回転軸216を駆動するモータに作用するトルクを検出する。なお、本実施形態では、荷重センサ215Bにより回転軸216に作用するトルクを検出したが、これに限らず、回転軸216を駆動するモータの電流値に基づいて、この回転軸216に作用するトルクを算出してもよい。
そして、この検出した荷重が所定値以上である場合にのみ、ロボット本体21の旋回軸213の旋回を開始して、一対のマニピュレータ22A、22Bでドア11の搬送を開始する。
【0045】
また、双腕ロボット20の旋回軸213を旋回させる際、トルクセンサ214により旋回軸213に作用するトルクを検出し、この検出したトルクが所定値以上である場合には、双腕ロボット20の旋回を停止する。なお、本実施形態では、トルクセンサにより旋回軸213に作用するトルクを検出したが、これに限らず、旋回軸213を駆動するモータの電流値に基づいて、この旋回軸213に作用するトルクを算出してもよい。
【0046】
以下、ドア取り外しシステム1の動作について、図5のフローチャートを参照しながら説明する。
まず、ボディ10がライン上を搬送され、ドア取り外しシステム1に供給される。この状態では、ドア11は閉じた状態である。
【0047】
まず、ST10では、単腕ロボット30は、原位置に位置している。
ST11では、単腕ロボット30のスライド部211をスライドさせて、ドア11の開閉範囲の外側にマニピュレータ32を移動させ、ST12では、この単腕ロボット30を待機させる。
【0048】
一方、ST0では、双腕ロボット20は、原位置に位置している。
ST1では、双腕ロボット20のスライド部211をスライドさせて、ドア11を把持する位置にマニピュレータ22A、22Bを移動させる。
ST2では、双腕ロボット20の第1マニピュレータ22Aに設けられた図示しないレーザ測定装置により、ドア11の位置を測定する。
【0049】
ST3では、測定したドアの位置に基づいて、予めティーチングされた動作を補正して、双腕ロボット20の第1マニピュレータ22Aによりドア11を開ける。
具体的には、図6に示すように、第1マニピュレータ22Aを駆動して、第1把持治具50のドア開けピン55を、ドア11のアウタパネル16の上辺とインナパネル15のパネル本体151の上辺との隙間に挿入するとともに、係止部52の第3緩衝部543をインナパネル15のパネル本体151の上辺に係止させて、このドア11をボディ10の外側に向かって引く。すると、ドア11が開いて、ドア11の下辺が露出する。
【0050】
ST4では、測定したドア11の位置に基づいて、双腕ロボット20の第1マニピュレータ22Aおよび第2マニピュレータ22Bにより、ドア11を把持する。
具体的には、図7に示すように、第2マニピュレータ22Bを駆動して、第2把持治具60の係止部62の第3緩衝部543をドア11の下辺に係止させるとともに、係止部62の第2緩衝部542でドア11の下辺を支持する。この状態では、第1把持治具50の緩衝部54と、第2把持治具60の緩衝部54とは、ドア11を上下に挟んで互いに対向した状態である。この状態から、第1把持治具50と第2把持治具60とを接近させることで、第1マニピュレータ22Aおよび第2マニピュレータ22Bによりドア11を挟持する。
【0051】
ST5では、双腕ロボット20の第1マニピュレータ22Aおよび第2マニピュレータ22Bによりドア11を把持した状態で、この双腕ロボット20を待機させる。
【0052】
一方、ST13では、双腕ロボット20によりドア11が把持された後、単腕ロボット30のスライド部211をスライドさせて、ボルト12を緩める位置にマニピュレータ32を移動させる。
【0053】
ST14では、測定したドア11の位置に基づいて、図8に示すように、ナットランナ71のソケットをヒンジ部材13、14のボルト12に嵌合させ、ナットランナ71を駆動して、上下のボルト12を緩めて取り外す。ここで、上側のヒンジ部材13のボルト12、下側のヒンジ部材14のボルト12の順に取り外す。
【0054】
具体的には、図9に示すように、まず、ナットランナ71のソケット711をボルト12に嵌合させる。次に、ナットランナ71を駆動して、ボルト12を緩める方向にソケット711を所定回転数だけ回転させる。すると、図10に示すように、ボルト12の回転により、ソケット711は距離xだけ後退する。この後退距離xが所定距離以上である場合、ボルト12が外れたと判定して、ST15に移る。
【0055】
ST15では、双腕ロボット20によるドア11の搬送経路の外側に、単腕ロボット30のマニピュレータ32を移動させ、ST16では、単腕ロボット30のスライド部211をスライドさせて、原位置に戻る。
【0056】
一方、ST6では、図11に示すように、双腕ロボット20の旋回軸213を旋回させるとともに、双腕ロボット20のスライド部211を図11中矢印方向Bにスライドさせて、双腕ロボット20によりドア11を搬送する。
ここで、双腕ロボット20の旋回動作を開始する際、まず、荷重センサ215Bにより第2マニピュレータ22Bに作用する荷重を検出するとともに、トルクセンサ214により旋回軸213に作用するトルクを検出する。検出した荷重が所定値以上であり、かつ、検出したトルクが所定値未満である場合にのみ、双腕ロボット20を旋回させる。
【0057】
ST7では、双腕ロボット20によりこのドア11をパレットに載置し、ST8では、双腕ロボット20のスライド部211をスライドさせて、原位置に戻る。
【0058】
本実施形態によれば、以下のような効果がある。
(1)ソケット711をボルト12に嵌合して、ナットランナ本体712によりボルト12を緩める方向にソケット711を所定回転数だけ回転させる。次に、ボルト12の回転によるソケット711の後退距離xをエンコーダ34により測定し、この測定した後退距離xが所定距離以上である場合には、ボルト12が外れたと判定する。このようにボルト12の回転による後退距離xに基づいて、ボルト12が外れたか否かを判定したので、ドア11とボディ10との連結を確実に解除でき、ドア11をボディ10から確実に取り外しできる。
【0059】
なお、本発明は前記実施形態に限定されるものではなく、本発明の目的を達成できる範囲での変形、改良等は本発明に含まれるものである。
【図面の簡単な説明】
【0060】
【図1】本発明の一実施形態に係るドア取り外しシステムの斜視図である。
【図2】前記実施形態に係るドア取り外しシステムの第1把持治具および第2把持治具の斜視図である。
【図3】前記実施形態に係るドア取り外しシステムのナットランナおよびナットランナ支持具の平面図および側面図である。
【図4】前記実施形態に係るドア取り外しシステムの制御手段の概略構成を示すブロック図である。
【図5】前記実施形態に係るドア取り外しシステムの動作のフローチャートである。
【図6】前記実施形態に係るドア取り外しシステムの第1把持治具をドアに係止した状態を示す斜視図である。
【図7】前記実施形態に係るドア取り外しシステムの双腕ロボットでドアを把持した状態を示す斜視図である。
【図8】前記実施形態に係るドア取り外しシステムの単腕ロボットでボルトを取り外している状態を示す斜視図である。
【図9】前記実施形態に係るドア取り外しシステムの単腕ロボットで上側のヒンジ部材のボルトを取り外している状態を示す斜視図である。
【図10】前記実施形態に係るドア取り外しシステムの単腕ロボットで下側のヒンジ部材のボルトを取り外している状態を示す斜視図である。
【図11】前記実施形態に係るドア取り外しシステムの双腕ロボットでドアを搬送している状態を示す斜視図である。
【符号の説明】
【0061】
1 ドア取り外しシステム
10 ボディ
11 ドア
12 ボルト
20 双腕ロボット
40 制御装置(制御手段)
71 ナットランナ
711 ソケット
712 ナットランナ本体(回転手段)
34 エンコーダ(移動距離検出手段)
【特許請求の範囲】
【請求項1】
自動車のボディにボルトで固定されたドアを、当該ボディから取り外すドア取り外しシステムであって、
前記ドアを把持して搬送可能なロボットと、
前記ボルトに嵌合可能なソケットおよび当該ソケットを回転させる回転手段を有するナットランナと、
前記ボルトの軸方向の移動距離を検出する移動距離検出手段と、
前記ロボットおよび前記ナットランナを制御する制御手段と、を備え、
当該制御手段は、前記ロボットにより前記ドアを把持し、前記ソケットを前記ボルトに嵌合して、前記回転手段により前記ボルトを緩める方向に当該ソケットを所定回転数だけ回転させ、前記ボルトの回転による前記ソケットの後退距離を前記移動距離検出手段により測定し、当該測定した後退距離が所定距離以上である場合には、前記ボルトが外れたと判定することを特徴とするドア取り外しシステム。
【請求項2】
自動車のボディにボルトで固定されたドアを、当該ボディから取り外すドア取り外し方法であって、
ロボットにより前記ドアを把持する手順と、
前記ソケットを前記ボルトに嵌合する手順と、
前記ボルトを緩める方向に当該ソケットを所定回転数だけ回転させる手順と、
前記ボルトの回転による前記ソケットの後退距離を測定する手順と、
当該測定した後退距離が所定距離以上である場合には、前記ボルトが外れたと判定する手順と、を備えることを特徴とするドア取り外し方法。
【請求項1】
自動車のボディにボルトで固定されたドアを、当該ボディから取り外すドア取り外しシステムであって、
前記ドアを把持して搬送可能なロボットと、
前記ボルトに嵌合可能なソケットおよび当該ソケットを回転させる回転手段を有するナットランナと、
前記ボルトの軸方向の移動距離を検出する移動距離検出手段と、
前記ロボットおよび前記ナットランナを制御する制御手段と、を備え、
当該制御手段は、前記ロボットにより前記ドアを把持し、前記ソケットを前記ボルトに嵌合して、前記回転手段により前記ボルトを緩める方向に当該ソケットを所定回転数だけ回転させ、前記ボルトの回転による前記ソケットの後退距離を前記移動距離検出手段により測定し、当該測定した後退距離が所定距離以上である場合には、前記ボルトが外れたと判定することを特徴とするドア取り外しシステム。
【請求項2】
自動車のボディにボルトで固定されたドアを、当該ボディから取り外すドア取り外し方法であって、
ロボットにより前記ドアを把持する手順と、
前記ソケットを前記ボルトに嵌合する手順と、
前記ボルトを緩める方向に当該ソケットを所定回転数だけ回転させる手順と、
前記ボルトの回転による前記ソケットの後退距離を測定する手順と、
当該測定した後退距離が所定距離以上である場合には、前記ボルトが外れたと判定する手順と、を備えることを特徴とするドア取り外し方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−111349(P2010−111349A)
【公開日】平成22年5月20日(2010.5.20)
【国際特許分類】
【出願番号】特願2008−287648(P2008−287648)
【出願日】平成20年11月10日(2008.11.10)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成22年5月20日(2010.5.20)
【国際特許分類】
【出願日】平成20年11月10日(2008.11.10)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]