
ドア把持装置及び方法
【課題】小型化されたツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能な、ドア把持装置及び方法を提供すること。
【解決手段】双腕ロボット11は、ドア91等の重力方向の力を受ける荷重受けとしてのドアH受け部材(その構成要素であるウレタンパッド42)と、ドアを把持する第1把持治具23R1と、を備えている。第1把持治具23R1は、2点PA,PBの相対距離が可変な、ドア91の開口部120等に当接する2つのドア把持パッド53,54を有している。一方のドア把持パッド53は、ドアの荷重方向の力を受ける方向に開口部の点PAに当接し、他方のドア把持パッド54は、荷重受け(ウレタンパッド42)とドア把持パッド53とにより発生するモーメントを受ける方向に開口部の点PBに当接する。
【解決手段】双腕ロボット11は、ドア91等の重力方向の力を受ける荷重受けとしてのドアH受け部材(その構成要素であるウレタンパッド42)と、ドアを把持する第1把持治具23R1と、を備えている。第1把持治具23R1は、2点PA,PBの相対距離が可変な、ドア91の開口部120等に当接する2つのドア把持パッド53,54を有している。一方のドア把持パッド53は、ドアの荷重方向の力を受ける方向に開口部の点PAに当接し、他方のドア把持パッド54は、荷重受け(ウレタンパッド42)とドア把持パッド53とにより発生するモーメントを受ける方向に開口部の点PBに当接する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車のドアを取り外すことが可能なドア取り外しシステムに適用可能な、ドア把持装置及び方法に関する。詳しくは、本発明は、小型化されたツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能な、ドア把持装置及び方法に関する。
【背景技術】
【0002】
従来より、自動車の製造工程では、ボルトでドアがボディに仮固定された自動車に対して塗装が行われた後、ボルトが取り外されることで、ドアがボディから取り外され、ドアとボディとが別々のラインで組み立てられている。
このように、自動車の製造工程の中には、ドアをボディから取り外すための工程(以下、「ドア取り外し工程」と呼ぶ)が存在する。
【0003】
このようなドア取り外し工程で用いられるドア取り外しシステムが、例えば特許文献1に記載されている。
特許文献1に記載のドア取り外しシステムは、ボディの両側に位置しナットランナを備えた2台の第1ロボットと、ボディの両側に位置しドアを把持する2台の第2ロボットとを備えており、次のように動作する。
即ち、第1ロボットが、ドアが開いた状態で、ナットランナを用いてボルトを緩めてドアとボディとの連結を解除する。その後、第2ロボットが、ドアを把持しつつ搬送する。
ここで、第2ロボットは、単腕ロボットであり、1枚のドアを把持するための専用のドア把持ハンドを有している。このドア把持ハンドの構造は、ドアの形状や構造に応じて、機種毎に異なっている。
【0004】
しかしながら、特許文献1に記載のドア取り外しシステムでは、1枚のドアを1台の単腕ロボットで支持して搬送するため、ロボットが大型化し、ロボットの占有スペースが大きくなる上に、ロボットの汎用性が低下する、という問題があった。
また、多機種を生産するラインでは、機種毎にドアの形状や構造が異なるため、複数種類の治具が必要になり、コストが上昇する、という問題があった。
さらに、製造ラインで製造する機種が変更される毎に、把持治具を交換したり調整したりすることになり、サイクルタイムが長期化する、という問題があった。
【0005】
そこで、これらの問題を解決すべく、本願出願人は、1枚のドアを把持しつつ搬送するためのロボットとして、双腕ロボットを採用したドア取り外しシステムについて、特許文献2に既に開示している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平9−103925号公報
【特許文献2】特開2009−214701号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献2に記載のドア取り外しシステムでは実現できなかった、小型化されたツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが要求されている状況である。
【0008】
本発明は、このような状況に鑑みてなされたものであり、小型化されたツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能な、ドア把持装置及び方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明のドア把持装置は、
自動車のドア(例えば実施形態における自動車のドア91)を把持するドア把持装置(例えば実施形態における双腕ロボット11)であって、
前記ドアの重力方向の力を受ける荷重受け(例えば実施形態におけるドアH受け部材24)と、
前記ドアを把持する把持ツール(例えば実施形態における第1把持治具23R1)と、
を備え、
前記把持治ツールは、2つの把持点(例えば実施形態における点PA,PB)の相対距離が可変な、前記ドアのインナパネルの開口部(例えば実施形態におけるドア91の開口部120等)の前記2つの把持点の各々に当接する2つのパッド(例えば実施形態におけるドア把持パッド53,54)を有しており、
前記2つのパッドのうち、一方のパッド(例えば実施形態におけるドア把持パッド53)は、前記ドアの荷重方向の力を受ける方向に開口部の把持点(例えば実施形態における点PA)に当接し、他方のパッド(例えば実施形態におけるドア把持パッド54)は、前記荷重受けと前記一方のパッドとにより発生するモーメントを受ける方向に開口部の別の把持点(例えば実施形態における点PB)に当接する、
ことを特徴とする。
【0010】
この発明によれば、荷重受けと1つの把持ツールとにより、ドアを把持することができるため、ドアをボディから取り外す際に必要なロボットの腕が1本で済む。よって、ドア取り外し工程で、少なくとも1つのドアに対しては、双腕ロボット単体を設置すれば済む。
また、ドアの開口部にパッドを当接させるのみでよいので、把持のための動力を必要とせず、把持ツールの小型化を図ることが可能になる。
さらにまた、ドアのインナパネルの開口部を把持に使用するため、ドアに傷がつかない。
以上まとめると、小型化された把持ツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能になる。
【0011】
本発明のドア把持方法は、上述の本発明のドア把持装置に対応する方法である。従って、上述の本発明のドア把持装置と同様の各種効果を奏することが可能になる。
【発明の効果】
【0012】
本発明によれば、小型化された把持ツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能になる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係るドア取り外しシステムの概略外観構成を示す斜視図である。
【図2】ドア取り外しシステムの双腕ロボットのうち、第1把持治具の概略外観構成を示す斜視図である。
【図3】ドア取り外しシステムの双腕ロボットのうち、第2把持治具の概略外観構成を示す斜視図である。
【図4】ドア開き動作の概略を説明する図である。
【図5】ボルト緩め動作の概略を説明する図である。
【図6】ドア把持運搬動作の概略を説明する図である。
【図7】双腕ロボットの第1アームの軌跡を説明する図であって、第1アーム側から見た場合の双腕ロボットの上半部の側面図である。
【図8】双腕ロボットの第1アームの軌跡を説明する図であって、双腕ロボットの上面図である。
【図9】ドア取り外し工程における双腕ロボットの移動動作を説明するフローチャートである。
【図10】図9のフローチャートの各ステップの各々の動作時における、双腕ロボットの位置及び状態をそれぞれ示す上面図である。
【図11】図9のフローチャートの各ステップの各々の動作時における、双腕ロボットの位置及び状態をそれぞれ示す上面図である。
【図12】図9のフローチャートの各ステップの各々の動作時における、双腕ロボットの位置及び状態をそれぞれ示す上面図である。
【図13】図9のフローチャートの各ステップの各々の動作時における、双腕ロボットの位置及び状態をそれぞれ示す上面図である。
【図14】図9のフローチャートの各ステップの各々の動作時における、双腕ロボットの位置及び状態をそれぞれ示す上面図である。
【図15】図9のフローチャートの各ステップの各々の動作時における、双腕ロボットの位置及び状態をそれぞれ示す上面図である。
【図16】図9のフローチャートの各ステップの各々の動作時における、双腕ロボットの位置及び状態をそれぞれ示す上面図である。
【図17】図9のフローチャートに従って双腕ロボットが移動動作する場合における、S1軸,S2軸,及びドアの位置関係を示す上面図である。
【図18】ドア取り外し工程におけるロボットの軌跡の概略を示す上面図である。
【図19】ドア取り外しシステムのドア把持運搬動作におけるドアの3点把持の手法を説明する図であって、内側からみたドアの概略外観構成の斜視図である。
【図20】ドア取り外しシステムのドア把持運搬動作におけるドアの3点把持位置の力関係を示す図であって、内側からみたドアの概略外観構成の斜視図である。
【図21】ドア取り外しシステムのドア把持運搬動作におけるドアの3点把持位置の力関係を示す図であって、前方側からみたドアの概略構成の断面図である。
【図22】ドア取り外しシステムのドア把持運搬動作におけるドアの3点把持位置の力関係を示す図であって、図20とは別の車種のドアを内側からみた場合の概略外観構成の斜視図である。
【図23】ドア取り外しシステムのドア把持運搬動作におけるドアの3点把持位置の力関係を示す図であって、図22の車種のドアを前方側からみた場合の概略構成の断面図である。
【図24】ドア把持パッドの概略外観構成を示す側面図である。
【図25】ボルト緩め動作におけるドアの把持の手法を説明する図であって、内側からみた場合のドアの概略外観構成を示す側面図である。
【図26】ドア取り外し工程における双腕ロボットの動作のうち、ボルト緩め動作及びドア把持運搬動作の詳細を説明するフローチャートである。
【図27】ドア取り外し工程における双腕ロボットの動作のうち、ボルト緩め動作及びドア把持運搬動作の詳細を説明するフローチャートである。
【図28】ボルトを緩める前のボルト緩めツールの縦断面図である。
【図29】筒及びギアの外観構成を示す斜視図である。
【図30】筒及び摺動ソケットの構成を示す横断面図である。
【図31】ボルトを緩めている最中のボルト緩めツールの縦断面図である。
【図32】ボルトを排出している状態のボルト緩めツールの縦断面図である。
【発明を実施するための形態】
【0014】
以下、本発明の一実施形態を図面に基づいて説明する。
図1は、本発明の一実施形態に係るドア取り外しシステムの概略外観構成を示す斜視図である。
【0015】
ドア取り外しシステム1は、双腕ロボット11と、制御装置12と、を備える。
双腕ロボット11は、制御装置12の制御の下、図1に図示せぬ自動車のボディにボルトで仮固定されたドアを、当該ボディから取り外すことができる。
【0016】
双腕ロボット11は、ロボット本体21と、第1アーム22R1と、第2アーム22R2と、第1把持治具23R1と、第2把持治具23R2と、ドアH受け部材24と、架台25と、を備える。
【0017】
ロボット本体21は、基台部31と、第1旋回部32と、第2旋回部33と、を備える。
基台部31は、架台25の上に固定して取り付けられる。
第1旋回部32は、基台部31の上部に、略垂直方向の回転軸S1を中心に旋回可能に取り付けられる。
第2旋回部33は、第1旋回部32の上部に、略垂直方向の回転軸S2を中心に旋回可能に取り付けられる。
ここで、回転軸S1と回転軸S2とは、水平方向(床面と略平行な方向)に所定距離だけ離間して相互に独立して設定されている。即ち、第1旋回部32と第2旋回部33の各々は、制御装置12の制御によって、相互に独立して旋回する。
なお、第1旋回部32及び第2旋回部33のさらなる詳細については、図7乃至図18を参照して後述する。
【0018】
第1アーム22R1及び第2アーム22R2の各々は、ロボット本体21の第2旋回部33の両端の上部に、回転軸S2を挟んで取り付けられる。
第1アーム22R1及び第2アーム22R2の各々は、多関節マニュピュレータとして構成されている。即ち、第1アーム22R1及び第2アーム22R2の各々は、複数の関節と、複数の連結部材と、各関節を回転させるサーボモータと、サーボモータの位置、速度、電流等の各種状態を検出する検出器と、を備える。
各サーボモータによる各関節の回転動作と、それらの回転動作に連動する各連結部材の移動動作との組み合わせにより、第1アーム22R1及び第2アーム22R2の各々の全体の動作が相互に独立して実現される。
【0019】
第1把持治具23R1は、第1アーム22R1の先端部にエンドエフェクトとして取り付けられ、第1アーム22R1の移動動作に伴い、自動車のドア等まで移動する。すると、第1把持治具23R1は、制御装置12の制御に従って、自動車のドアを把持する等の各種動作を行う。
なお、第1把持治具23R1の更なる詳細については、図2を参照して後述する。
【0020】
第2把持治具23R2は、第2アーム22R2の先端部にエンドエフェクトとして取り付けられ、第2アーム22R2の移動動作に伴い、自動車のドア等まで移動する。すると、第2把持治具23R2は、制御装置12の制御に従って、自動車のドアとボディとを仮固定しているボルトを取り外したり、当該ドアを把持する等の各種動作を行う。
なお、第2把持治具23R2の更なる詳細については、図3を参照して後述する。
【0021】
ドアH受け部材24は、略垂直方向に昇降可能に架台25に対して取り付けられ、自動車のドアを下から略垂直上向き方向に受け止めるように把持する。
具体的には、ドアH受け部材24は、昇降シリンダ41と、ウレタンパッド42と、計測シリンダ43と、を備えている。
昇降シリンダ41は、ウレタンパッド42を任意の位置に昇降するシリンダである。ウレタンパッド42は、自動車のドアの下部に係止し、当該ドアを略垂直上向き方向に受け止めるように把持する。計測シリンダ43は、ウレタンパッド42に併せて昇降するシリンダであり、そのストローク位置によって、ウレタンパッド42の垂直方向の位置を計測することができる。
なお、ドアH受け部材24のさらなる詳細については、図5、図24、及び図25を適宜参照して後述する。
【0022】
架台25は、床面に固定して配置され、上述したように、第1アーム22R1及び第2アーム22R2が搭載されたロボット本体21(より正確には基台部31)と、ドアH受け部材24とを取り付ける。
【0023】
制御装置12は、双腕ロボット11の動作を制御する。
具体的には、制御装置12は、ロボット本体21における第1旋回部32及び第2旋回部33の各々の相互に独立した旋回を制御する。
また、制御装置12は、第1アーム22R1及び第2アーム22R2の各々に対して相互に独立した位置決め制御を行う。
また、制御装置12は、第1把持治具23R1及び第2把持治具23R2の動作を制御する。
さらにまた、制御装置12は、ドアH受け部材24の昇降の動作を制御する。
【0024】
図2は、このような構成のドア取り外しシステム1の双腕ロボット11のうち、第1把持治具23R1の概略外観構成を示す斜視図である。
第1把持治具23R1は、支持部51と、フレーム52と、ドア把持パッド53,54と、機種切替シフト55と、ドア開きピン56と、センサ57と、を備えている。
【0025】
支持部51は、第1アーム22R1の先端部に取り付けられることで、第1把持治具23R1を第1アーム22R1に対して支持する。
フレーム52は支持部51に取り付けられ、その長手方向が第1アーム22R1の先端部の面と略平行に延在している。
【0026】
ドア把持パッド53は、フレーム52に対して突出するように支持部51に取り付けられ、図2に図示せぬ自動車のドアの一点を把持する。
ドア把持パッド54は、フレーム52に対して突出し、かつ、フレーム52の長手方向と略平行にドア把持パッド53から離間して、機種切替シフト55に取り付けられ、図2に図示せぬ自動車のドアの一点を把持する。
換言すると、図2に図示せぬ自動車のドアのうち所定方向に離間している2点が、当該所定方向とフレーム52の長手方向とが略平行となっている状態(そのように第1アーム22R1が移動した状態)におけるドア把持パッド53,54によりそれぞれ把持される。なお、ドアの把持の手法のさらなる詳細については、図5、及び図19乃至図24を参照して後述する。
機種切替シフト55は、フレーム52に取り付けられ、ドアを取り外す対象の自動車の機種に応じて、フレーム52の長手方向にスライドすることによって、ドア把持パッド54の位置をフレーム52の長手方向に沿って移動させる。即ち、機種切替シフト55は、フレーム52の長手方向におけるドア把持パッド53,54の離間距離を、距離LAから距離LBの範囲内で可変させる機能を有している。
【0027】
ドア開きピン56は、フレーム52に対して、ドア把持パッド53とは略垂直方向に突出するように支持部51に取り付けられ、図2に図示せぬ自動車のドアを開くときに用いられる。
センサ57は、フレーム52に対して、ドア把持パッド53とは略垂直方向に突出するように支持部51に取り付けられ、図2に図示せぬ自動車のドアのうち、ドア開きピン56の挿入位置を検出する。
ドア開きピン56及びセンサ57を用いた自動車のドアを開く動作については、図4を参照して後述する。
【0028】
以上、図1の構成のドア取り外しシステム1の双腕ロボット11のうち、第1把持治具23R1の概略外観構成について、図2を参照して説明した。
次に、当該双腕ロボット11のうち、第2把持治具23R2の概略外観構成について、図3を参照して説明する。
【0029】
図3は、ドア取り外しシステム1の双腕ロボット11のうち、第2把持治具23R2の概略外観構成を示す斜視図である。
第2把持治具23R2は、支持部71と、ドア把持パッド72と、フレーム73と、ボルト緩めツール74と、先端ツール切替機構75と、ボルト排出機構76と、を備えている。
【0030】
支持部71は、第2アーム22R2の先端部に取り付けられることで、第2把持治具23R2を第2アーム22R2に対して支持する。
【0031】
ドア把持パッド53は、突出するように支持部71に取り付けられ、図3に図示せぬ自動車のドアの一点を把持する。
ただし、図3(A)の状態では、支持部71に対して、後述のボルト緩めツール74の方がドア把持パッド53より突出しているので、ドア把持パッド53によるドアの一点の把持が困難になる。
そこで、図3(B)の状態、即ち、後述のボルト緩めツール74が支持部71側に折り畳まれて、ドア把持パッド53のみが突出している状態で、ドア把持パッド53が、ドアの一点を把持する。
この場合、必要に応じて、ドア把持パッド53は、図2の第1把持治具23R1のドア把持パッド53,54と共に、ドアの3点(所定形状の三角形の頂点)を把持することができる。なお、このようなドアの把持の仕方を、「3点把持」と呼ぶ。3点把持の詳細については、図19乃至図24を参照して後述する。
【0032】
フレーム73においては、長手方向の一端が後述の先端ツール切替機構75に接続され、長手方向の他端には、ボルト緩めツール74が取り付けられている。
フレーム73は、後述の先端ツール切替機構75の軸rを中心に回動可能に構成されており、その配置状態として図3(A)又は図3(B)の状態を取ることができる。
フレーム73の配置状態が図3(A)の状態の場合、上述したように、ドア把持パッド72が機能して、ドアの一点の把持が行われる。なお、図3(A)の状態を、以下、「緩め位置状態」と呼ぶ。
これに対して、フレーム73の配置状態が図3(B)の状態の場合、ボルト緩めツール74が機能する。なお、図3(B)の状態を、以下、「把持位置状態」と呼ぶ。
【0033】
ボルト緩めツール74は、図3に図示せぬ自動車のドアがボディに仮固定されているボルトを加工対象として、図1の制御装置12の制御の下、当該ボルトを緩める動作をする。
なお、ボルト緩めツール74によるボルトの緩めの動作の詳細については、図5、及び図26乃至図31を参照して後述する。
【0034】
先端ツール切替機構75は、図1の制御装置12の制御の下、図3に図示せぬ自動車のドアを把持する場合には、把持位置状態になるまでフレーム73を回動させて保持し、当該自動車のドアがボディに仮固定されているボルトを緩める場合には、緩め位置状態になるまでフレーム73を回動させて保持する。換言すると、先端ツール切替機構75は、その呼称が示す通り、第2把持治具23R2において機能する先端ツールとして、ドア把持パッド72とボルト緩めツール74のうち一方から他方へ切り替える機能を有している。
【0035】
ボルト排出機構76は、支持部71に対して、先端ツール切替機構75の軸rと略方向に延在するように取り付けられ、図3(B)の把持位置状態から図3(A)の緩め位置状態に遷移すると、ボルト緩めツール74に収納されたボルトを外部に排出する。
なお、ボルト緩めツール74にボルトが収納される点については、図26乃至図31を参照して後述する。
【0036】
以上、図1乃至図3を参照して、ドア取り外しシステム1の構成について説明した。
次に、図4以降の図面を参照して、ドア取り外しシステム1の動作について説明する。
【0037】
ドア取り外しシステム1はドア取り外し工程に設置されるため、その動作としては、自動車のドアをボディから開く動作(以下、「ドア開き動作」と呼ぶ)と、ドアとボディとを仮固定しているボルトを緩めて取り外す動作(以下、「ボルト緩め動作」と呼ぶ)、ドアを把持して運搬する動作(以下、「ドア把持運搬動作」と呼ぶ)と、の3種類に大別される。
図4は、ドア開き動作の概略を説明する図である。
図5は、ボルト緩め動作の概略を説明する図である。
図6は、ドア把持運搬動作の概略を説明する図である。
【0038】
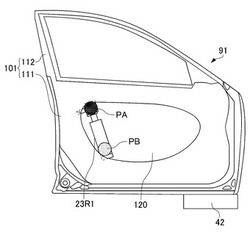
ドア取り外し工程の初期状態とは、自動車のボディがライン上を搬送され、ドア取り外しシステム1に供給された状態であって、図4に示すように、ドア91は閉じた状態である。
【0039】
ここで、ドア91は、インナパネル101とアウタパネル102とが接合されて構成される。
インナパネル101は、略平板矩形状のパネル本体111と、当該パネル本体111の上端に設けられた略コの字形状のフレーム部112と、を備えている。フレーム部112とパネル本体111の上辺とで囲まれた領域は、図示しない窓ガラスが露出する開口となっている。
アウタパネル102は、インナパネル101のパネル本体111の外側に取り付けられる。
アウタパネル102の上辺とインナパネル101のパネル本体111の上辺との間には、窓ガラスを収容するための隙間が形成されている。
【0040】
このような図4の初期状態で、制御装置12(図1)の制御による、第1アーム22R1の移動が開始する。この間、当該第1アーム22R1に取り付けられた第1把持治具23R1のセンサ57は、ドア91のうち、ドア開きピン56の挿入位置の検出を試みる。
ドア開きピン56の挿入位置は、特に限定されないが、本実施形態では、ドア91のアウタパネル102の上辺とインナパネル101のパネル本体111の上辺との隙間であるものとする。
センサ57が当該隙間を検出すると、第1把持治具23R1のドア開きピン56が当該隙間に挿入され、この状態で、第1アーム22R1によってドア91がボディの外側に向かって引かれる。すると、ドア91が開いて、ドア91の下辺が露出する。
【0041】
このようにして、図4に示すドア開き動作が終了すると、図5に示すボルト緩め動作が開始する。
【0042】
詳細については、図25乃至図32を参照して後述するが、制御装置12の制御の下、ドアH受け部材24のウレタンパッド42が上昇して、ドア91の下部に係止し、当該ドアを略垂直上向き方向に受け止めるように把持する。また、制御装置12の制御の下、第1アーム22R1が移動して、当該第1アーム22R1に取り付けられた第1把持治具23R1のドア把持パッド53,54が、ドア91のインナパネル101のパネル本体111に設けられた開口部の2点を把持する。
この間、制御装置12の制御の下、第2アーム22R2が移動して、当該第2アーム22R2に取り付けられた第2把持治具23R2のボルト緩めツール74が、ドア91とボディ92とを仮固定しているボルトを緩めて取り外す。
即ち、第1アーム22R1及びドアH受け部材24にてドア91が保持されている状態で、第2アーム22R2によりボルト緩めが行われる。
【0043】
このようにして、図5に示すボルト緩め動作が終了すると、図6に示すドア把持運搬動作が開始する。
【0044】
詳細については、図19乃至図24を参照して後述するが、制御装置12の制御の下、
第1アーム22R1に取り付けられた第1把持治具23R1のドア把持パッド53,54、及び、第2アーム22R2に取り付けられた第2把持治具23R2のドア把持パッド72の各々が、ドア91のインナパネル101のパネル本体111に設けられた開口部の3点(所定の形状の三角形の各頂点)の各々を把持する。
この状態で、第1アーム22R1及び第2アーム22R2が、協調して動作して、ドア91を運搬する。ドア91が、所定場所まで運搬されて払出されると、図6に示すドア把持運搬動作は終了する。即ち、ドア取り外しシステム1によるドア取り外し工程の全体が終了する。
【0045】
以上、図4乃至図6を参照して、ドア取り外しシステム1の動作の概略について説明した。さらに、以下、ドア取り外しシステム1の動作の詳細について説明する。
先ず、図7乃至図20を参照して、双腕ロボット11の移動動作について説明する。
【0046】
図7は、双腕ロボット11の第1アーム22R1の軌跡を説明する図であって、第1アーム22R1側から見た場合の双腕ロボット11の上半部の側面図である。
図8は、双腕ロボット11の第1アーム22R1の軌跡を説明する図であって、双腕ロボット11の上面図である。
【0047】
図7や図8に示すように、第1アーム22R1は、略垂直方向の2つの軸S1,S2の各々を中心として相互の軸と独立して回動可能である。このため、第1アーム22R1の点P1及び第2アーム22R2の点P2の可動範囲の軌跡は、略垂直方向については図7の一点鎖線に示されるようになり、略水平方向については、図8の一点鎖線に示されるようになる。
なお、図7には、説明の簡略上、第1アーム22R1のみが図示されているが、第1アーム22R1と独立して駆動可能な第2アーム22R2の点P2についても、略垂直方向の可動範囲の軌跡は、第1アーム22R1の点P1と略同一になる。
【0048】
図9は、ドア取り外し工程における双腕ロボット11の移動動作を説明するフローチャートである。
図10乃至図16の各々は、図9のフローチャートの各ステップの各々の動作時における、双腕ロボット11の位置及び状態をそれぞれ示す上面図である。
なお、図10乃至図16の各々においては、説明の簡略上、第1把持治具23R1及び第2把持治具23R2の図示は省略されている。
【0049】
ドア取り外し工程において、図4を用いて上述した初期状態になると、制御装置12の制御の下、双腕ロボット11の移動動作が開始する。
【0050】
ステップS21において、双腕ロボット11は、ドア開き位置まで移動する。
ここで、ドア開き位置とは、双腕ロボット11が、図10に示すように配置されて、図4を用いて上述したドア開き動作が開始可能になる位置をいう。
【0051】
ステップS22において、双腕ロボット11は、図4を用いて上述したドア開き動作を開始する。
すると、双腕ロボット11は、図11に示すように、軸S1を中心とした回動動作と、第1アーム22R1の移動動作とを組み合わせることによって、ドア91を円弧状に開ける。
【0052】
ステップS23において、双腕ロボット11は、ドア開き動作を終了する。
この段階では、双腕ロボット11は、図12に示す位置まで移動している。
ここで、本実施形態では、同一又は別の双腕ロボット11が、同様のドア開き動作を行って、図13に示すように、前後の2つのドア91が開けられるものとする。
この場合、双腕ロボット11は、前後の2つのドア91の間の狭小部に入り込まないと、ボルト緩め動作を開始することができない。
そこで、双腕ロボット11は、ボルト緩め動作を開始する前に、次のステップS24及びS25の移動動作をすることによって、前後の2つのドア91の間の狭小部に入り込む。
【0053】
即ち、ステップS24において、双腕ロボット11は、図13に示すように、ドア91の内側(インナパネル101側)に入り込む。
ステップS25において、双腕ロボット11は、図14に示すように、軸S1を中心とした回動動作と、軸S2を中心とした回動動作とを組み合わせることによって、ドア91の内側(インナパネル101側)にさらに入り込む。
【0054】
ステップS26において、双腕ロボット11は、図15に示すドア把持位置まで移動すると、軸S1を中心とした回動動作と、軸S2を中心とした回動動作とを停止する。
ここで、ドア把持位置とは、双腕ロボット11が、図15に示すように配置されて、図5を用いて上述したボルト緩め動作、及び、図6を用いて上述したドア把持運搬動作が開始可能になる位置をいう。
【0055】
ステップS27において、双腕ロボット11は、図5を用いて上述したボルト緩め動作を行う。
【0056】
ステップS28において、双腕ロボット11は、図6を用いて上述したドア把持運搬動作を開始する。
すると、双腕ロボット11は、軸S1を中心とした回動動作と、軸S2を中心とした回動動作とを組み合わせることによって、ステップS24及びS25の移動動作時とは逆の軌跡に沿って移動する。
【0057】
ステップS29において、双腕ロボット11は、図16に示す位置まで移動し、ドア91を図示せぬ搬送ハンガーに移載することで、ドア把持運搬動作を終了する。
これにより、ドア取り外し工程の全体も終了になる。
【0058】
図17は、上述の図9のフローチャートに従って双腕ロボット11が移動動作する場合における、S1軸,S2軸,及びドア91の位置関係を示す上面図である。
図17に示すように、ステップS21からS26の動作の段階では、S1軸の回動動作は反時計回りの動作となる。この間、S2軸の回動動作が独立して適宜行われる。
そして、S1軸の回動動作は、ステップS26からS28の動作の段階では一旦停止し、その後、ステップS28からS29の動作の段階では時計回りの動作となる。この間、S2軸の回動動作が独立して適宜行われる。
【0059】
ここで、ドア取り外し工程における、本実施形態の双腕ロボット11の動作と、従来のロボットの動作との差異について説明する。
【0060】
ドア取り外し工程における作業としては、閉まったドア91を開く作業と、開いたドア91からボルトを外す作業と、インナ側(インナパネル101側)からドア91を把持し運搬する作業と、が存在する。
このような作業の各々を自動化する場合、ロボット(本実施形態では双腕ロボット11)の動作としては、閉まったドア91を開く作業に対応するドア開き動作と、開いたドア91からボルトを外す作業に対応するボルト緩め動作と、内側(インナパネル101側)からドア91を把持し運搬する作業に対応するドア把持運搬動作と、の3種類に大別されることは上述した通りである。
【0061】
これらの3種類の動作、即ち、ドア開き動作、ボルト緩め動作、及び、ドア把持運搬動作の全てを同一のロボットに行わせるためには、図18に示す動作が必要になる。
図18は、ドア取り外し工程におけるロボットの軌跡の概略を示す上面図である。
【0062】
ステップST1において、ロボットは、図18の実線の矢印で示す軌跡で、閉まったドア91のスキン側(アウタパネル102側)に移動する。
ステップST2において、ロボットは、図18の点線の矢印で示す軌跡で、ドア91を開く動作をする。このようなステップST2の動作が、ドア開き動作に相当する。
【0063】
次に、ステップST3において、ロボットは、図18の一点鎖線の矢印で示す軌跡で、開いたドア91のインナ側(インナパネル101側)に入り込むように移動する。
【0064】
そして、ロボットは、ボルト緩め動作を行い、その後、ドア把持運搬動作を開始する。
すると、ステップST4において、ロボットは、図18の二点鎖線の矢印で示す軌跡で、ドア91を把持したまま移動して、当該ドア91を図示せぬドアバンガーに移載する。
【0065】
従来においては、自動車のボディ92の運搬方向(以下、図18の記載にあわせて「T方向」と呼ぶ)と、水平面においてT方向に垂直な方向(以下、図18の記載にあわせて「B方向」と呼ぶ)とのそれぞれに、ロボットを移動させるシフトベースが取り付けられていた。このようなシフトベース自体は大きなものとなっていた。
この場合、ロボットの移動のうち、ステップST2における移動(点線の矢印で示す軌跡の移動)と、ステップST3における移動(一点鎖線の矢印で示す軌跡の移動)は、円弧状のような移動となるため、サイクルタイムがかかるという問題があった。
【0066】
これに対して、本実施形態の双腕ロボット11においては、第1アーム22R1及び第2アーム22R2が、これらにとって外部軸であるS1軸及びS2軸の各々によって回動される。
これにより、S1軸を用いた回動により、ドア開き動作(図18のステップST2、図9のステップS22及びS23)が実現される。
そして、S1軸とS2軸とを用いた回動により、ボルト緩め動作を行うための、ドア91のインナ側(インナパネル101側)に入り込む移動(図18のステップST3、図9のステップS24及びS25)が実現される。この場合の移動は、図12乃至図15を用いて上述したように、ドア91の方向を向くような移動である。
その結果、ドア把持位置まで移動したとき(図9のステップS26)、双腕ロボット11は、ボルト緩め動作を行い易い姿勢となっているため、サイクルタイムの短縮を図ることが可能になる。
【0067】
以上説明したように、本実施形態のドア取り外しシステム1には、自動車のボディのドアの開け方として、次のような手法が適用されている。
即ち、本実施形態のドア取り外しシステム1の双腕ロボット11は、
ドアを開けるためのツールとしての第1把持治具23R1が接続された第1アーム22R1と、
ドアを開けるための別のツールとしての第2把持治具23R2が接続された第2アーム22R2と、
これらの第1アーム22R1及び第2アーム22R2が取り付けられる台座としてのロボット本体21と、
を備えている。
ロボット本体21には、地面に略垂直な方向の回転軸S1と、当該回転軸S1に対して地面方向にオフセットして位置する回転軸S2と、が設けられている。
この場合、双腕ロボット11は、
第1アーム22R1及び第2アーム22R2を用いてドアを外側から把持し、
回転軸S1を回転させてドアを開き、
回転軸S1をさらに回転させて、開いたドアの内側にロボット本体21を移動させると共に、ドアの作業箇所(把持したりボルトを緩める作業をする箇所)に対して、第1アーム22R1及び第2アーム22R2が正面を向くように、回転軸S2を回転させる。
【0068】
これにより、本実施形態では、次の(1)及び(2)の効果を奏することが可能になる。
(1)2つの回転軸S1,S2を設けるのみでロボットの移動が可能になる。よって、ドア取り外しシステム1の設置箇所が小さくて済む。
(2)ドアの開きが完了したときには、双腕ロボット11は、ドアに対する作業がし易い姿勢となっている。よって、サイクルタイムが短縮される。
【0069】
以上、図7乃至図18を参照して、ドア取り外しシステム1の動作の詳細の1つとして、双腕ロボット11の移動動作について説明した。
次に、ドア取り外しシステム1の動作の詳細の別の1つとして、ドア把持運搬動作(図6参照)におけるドアの3点把持の手法について、図19乃至図24を参照して説明する。
【0070】
図19は、ドア取り外しシステム1のドア把持運搬動作におけるドアの3点把持の手法を説明する図であって、内側からみたドアの概略外観構成の斜視図である。
図19に示すように、制御装置12の制御の下、第1把持治具23R1のドア把持パッド53,54、及び、第2把持治具23R2のドア把持パッド72の各々が、ドア91のインナパネル101のパネル本体111に設けられた開口部120の3点PA,PB,PCの各々を把持する。
【0071】
図20は、ドア取り外しシステム1のドア把持運搬動作におけるドアの3点把持位置の力関係を示す図であって、内側からみたドアの概略外観構成の斜視図である。
図21は、ドア取り外しシステム1のドア把持運搬動作におけるドアの3点把持位置の力関係を示す図であって、前方側からみたドアの概略構成の断面図である。
図20や図21に示すように、開口部120の点PA及び点PCの2点の各々で把持するドア把持パッド53,72の各々により、ドア91の重量が支えられる。即ち、点PGの位置がドア91の重心位置であり、点PA及び点PCの各々にはドア91の重量の約半分の力がそれぞれかかることになる。
そして、開口部120の点PBで把持するドア把持パッド54により、ドア91のブレが抑えられる。
【0072】
具体的には、ドア把持パッド53は、開口部120の上側の端部である点PAに当接して、重力方向の力を支えるようにドア91を把持する。
ここで、図19に示すように、重力方向を「Z方向」と呼び、図18のT方向(自動車のボディ92の運搬方向)と平行な方向を「X方向」と呼び、図18のB方向と水平な方向を「Y方向」と呼ぶ。
この場合、点PAは、Y方向の開口部120の端部に設定されるため、ドア91の運搬時の慣性力を受ける。よって、点PAは、Z方向についてはなるべく上の位置に設定されるとよい。
【0073】
ドア把持パッド54は、開口部120のY方向の端部となる点PBに当接して、Y方向の力を受けるようにドア91を把持する。
この場合、点PBは、荷重受けとなり、点PAで把持するドア把持パッド53により発生するモーメントを受ける位置に設定される。また、点PBは、Z方向についてはなるべく下の位置に設定されるとよい。
【0074】
ドア把持パッド72は、開口部120の上側の端部である点PCに当接して、重力方向の力を支えるようにドア91を把持する。
この場合、点PCは、−Y方向の開口部120の端部に設定されるため、ドア91の運搬時の慣性力を受ける。よって、点PCは、Z方向についてはなるべく上の位置に設定されるとよい。
また、点PCは、重心(点PG)を点PAと挟むように設定される。即ち、点PCによる荷重受けの位置は、点PAと重心を挟む位置になる。
【0075】
換言すると、ドア把持パッド53,54は第1アーム22R1により、ドア把持パッド72は第2アーム22R2により、それぞれ任意の位置に自在に配置させることが可能である。
よって、所定の車種のドア91の把持についてのみ言及したが、インナパネル側に開口部を有するドアであればその車種によらず、点PA,点PB,点PCを上述のように設定することで、本実施形態のドアの3点把持の手法(図19乃至図21参照)を同様に適用することができる。
ただし、この場合、図2の機種切替シフト55が、自動車の車種に応じて、フレーム52の長手方向にスライドすることによって、ドア把持パッド54の位置をフレーム52の長手方向に沿って移動させる。即ち、機種切替シフト55は、フレーム52の長手方向におけるドア把持パッド53,54の離間距離を、距離LAから距離LBの範囲内で自動車の車種に応じて変更する。
【0076】
図22は、ドア取り外しシステム1のドア把持運搬動作におけるドアの3点把持位置の力関係を示す図であって、図20とは別の車種のドアを内側からみた場合の概略外観構成の斜視図である。
図23は、ドア取り外しシステム1のドア把持運搬動作におけるドアの3点把持位置の力関係を示す図であって、図22の車種のドアを前方側からみた場合の概略構成の断面図である。
【0077】
ここで、図22及び図23に示すドア131は、ドア91とは異なる車種のドアであって、インナパネル141とアウタパネル142とが接合されて構成される。
インナパネル141は、略平板矩形状のパネル本体151と、当該パネル本体151の上端に設けられた略コの字形状のフレーム部152と、を備えている。フレーム部152とパネル本体151の上辺とで囲まれた領域は、図示しない窓ガラスが露出する開口となっている。
インナパネル141には、2つの開口部161,162が設けられている。
アウタパネル142は、インナパネル141のパネル本体151の外側に取り付けられる。
アウタパネル142の上辺とインナパネル141のパネル本体151の上辺との間には、窓ガラスを収容するための隙間が形成されている。
【0078】
開口部161の点PAで把持するドア把持パッド53と、開口部162の点PCで把持するドア把持パッド72との各々により、ドア131の重量が支えられる。即ち、点PGの位置がドア131の重心位置であり、点PA及び点PCの各々にはドア131の重量の約半分の力がそれぞれかかることになる。
そして、開口部161の点PBで把持するドア把持パッド54により、ドア131のブレが抑えられる。
【0079】
具体的には、ドア把持パッド53は、開口部161の上側の端部である点PAに当接して、重力方向の力を支えるようにドア131を把持する。
ドア把持パッド54は、開口部161のY方向の下側の端部となる点PBに当接して、Y方向の力を受けるようにドア131を把持する。
ドア把持パッド72は、開口部162の上側の端部である点PCに当接して、重力方向の力を支えるようにドア131を把持する。
【0080】
ここで、ドア取り外し工程のドア把持運搬動作におけるドアの3点把持の手法について、本実施形態の手法と、従来の手法との差異について説明する。
【0081】
従来の手法によれば、所定のピッチでドア(ワーク)に配置された3点のPIN孔にPINを挿すことで、ドアを安定させて、ピンクランプやクランプ等でドアの重量を把持している。従来手法では、凹凸を有する山切りチャックを用いることで、PIN孔の奥行きの機種差を解消するようにしている。
【0082】
このような従来の手法では、次のような第1乃至第3の問題点が生じていた。
第1の問題点とは、3点のPIN孔にPINを勘合させるために、3点の穴位置を正確に把握しないといけないという問題点、換言すると、センシングや把持前のドア位置を位置決めしていないとならないという問題点である。
第2の問題点とは、ドア取り外し工程では塗装後のドアが対象となるところ、このような塗装後のドアに対して、PINを挿す際やクランプする際にデフォームをつけなければならないという問題点である。
第3の問題点とは、ピンクランプやチャック等の重量が大きなクランプ機器が必要になるという問題点である。
【0083】
これに対して、図19乃至図21を用いて上述した本実施形態の3点把持の手法を適用することで、これらの従来の第1乃至第3の問題点を解消することができる。
即ち、ドア91には、内部部品取り付けのため等の理由により開口部120が設けられている。この開口部120の3点PA,PB,PCの各々が、ドア把持パッド53,54,72の各々により、ワークたるドア91(図20等)やドア131(図22等)を安定して保持できる。これにより、従来必要であった3点のPIN孔は不要になり、第1の問題や第2の問題が解消する。
また、ドア把持パッド53,54は、第1アーム22R1のエンドエフェクタたる第1把持治具23R1に設けられており、ドア把持パッド72は、第2アーム22R2のエンドエフェクタたる第2把持治具23R2に設けられている。これにより、ドア把持パッド53,54,72の配置によりドア91(図20等)やドア131(図22等)の把持が可能になる。即ち、機種毎に開口部の仕様差はあるが(図20の1つの開口部120と、図22の2つの開口部161,162との差異参照)、第1アーム22R1及び第2アーム22R2といった双椀で、ドア把持パッド53,54,72により重心位置を囲むように各機種のドアをバランス良く把持することができる。従って、従来必要であったピンクランプやチャック等の重量が大きなクランプ機器が不要になり、ドア91への負荷が少なくなる。即ち、第3の問題点が解決する。
【0084】
ここで、ドア把持パッド53,54,72は、図24に示す形状を有している。
図24は、ドア把持パッドの概略外観構成を示す側面図である。
なお、図24においては、ドア把持パッド53の形状のみが図示されているが、ドア把持パッド54,72の形状も図24に示すようになる。
ドア把持パッド53,54,72は、把持部171と、フローティング機構172と、を有している。
把持部171は、MCナイロン(登録商標)製であり、邦楽の和楽器の「つづみ」の円筒形状、即ち、2つの円錐台の上面(小円状の面)同士を接合した形状を有している。この接合部において凹部が形成されており、当該凹部において、ドア91のパネル本体111(開口部120)が係止される。なお、図24には、パネル本体111のみが図示されているが、当然ながら各機種のパネル本体(例えば、図22等に示す2つの開口部161,162を有するパネル本体151)も、当該凹部において係止され得る。このように、把持部171は、円筒形状を有することにより、開口部120の形状に対応できるようになっている。
フローティング機構172は、把持部171の2つの円錐台の下面を貫通する軸において、当該2つの円錐台の下面の各々に接するように設けられる弾性体を有することによって、ワーク(ドア91やドア131等)のバラつきに対応できるようにしている。
【0085】
以上、図19乃至図24を参照して、ドア把持運搬動作(図6参照)におけるドアの3点把持の手法について説明した。
次に、ドア取り外し工程における双腕ロボット11の動作のうち、ボルト緩め動作(図5参照)及びドア把持運搬動作(図6参照)の詳細について、図25乃至図27を参照して説明する。
【0086】
ボルト緩め動作では、図6に示すように、第2把持治具23R2に設けられたボルト緩めツール74が用いられるため、第2把持治具23R2に設けられたドア把持パッド72を用いることができなくなる。即ち、図19乃至図24を参照して上述したドアの3点把持の手法を適用することができない。
そこで、本実施形態では、ボルト緩め動作においては、図25に示すようなドアの把持の手法が適用される。
【0087】
図25は、ボルト緩め動作におけるドアの把持の手法を説明する図であって、内側からみた場合のドアの概略外観構成を示す側面図である。
図25に示すように、ボルト緩め動作では、第1把持治具23R1のドア把持パッド53,54の各々が、ドア91の開口部120の点PA,PBの各々で把持すると共に、点PCで把持する第2把持治具23R2のドア把持パッド72の代わりに、ドアH受け部材24のウレタンパッド42でドア91の下部を把持する。
【0088】
このように、本実施形態のドア取り外しシステム1の双腕ロボット11は、
ドア(ドア91等)の重力方向の力を受ける荷重受けとしてのドアH受け部材24(ウレタンパッド42)と、
ドアを把持する把持ツールとしての第1把持治具23R1と、
を備えており、
第1把持治具23R1は、
機種切替シフト55(図2)による2点(点PA,PB)の相対距離が可変である、ドアのインナパネルの開口部(ドア91の開口部120等)に当接する2つのドア把持パッド53,54を有している。
2つのドア把持パッド53,54のうち、一方のパッド(本実施形態ではドア把持パッド53)は、ドアの荷重方向の力を受ける方向に開口部に当接し、他方のパッド(本実施形態ではドア把持パッド54)は、荷重受け(H受け部材24)と前記一方のパッドとにより発生するモーメントを受ける方向に開口部に当接する。
【0089】
これにより、本実施形態では、上述の(1)及び(2)の効果に加えてさらに、次の(3)乃至(5)の効果を奏することが可能になる。
(3)荷重受け(H受け部材24)と1つの把持ツール(第1把持治具23R1)とにより、ドアを把持することができるため、ドアをボディから取り外す際に必要なロボットの腕が1本(本実施形態では第1アーム22R1のみ)で済む。よって、ドア取り外し工程で、少なくとも1つのドアに対しては、双腕ロボット11単体を設置すれば済む。
(4)ドアの開口部にパッド(ドア把持パッド53,54)を当接させるのみでよいので、把持のための動力を必要とせず、把持ツール(第1把持治具23R1)の小型化を図ることが可能になる。
(5)ドアのインナパネルの開口部を把持に使用するため、ドアに傷がつかない。
【0090】
さらに以下、ドア取り外し工程における双腕ロボット11の動作のうち、このような図25を参照して上述したドアの把持の手法が適用されたボルト緩め動作(図5参照)、及び、図19乃至図24を参照して上述したドアの3点把持の手法が適用されたドア把持運搬動作(図6参照)の詳細について、図26及び図27を参照して説明する。
【0091】
図26及び図27は、ドア取り外し工程における双腕ロボット11の動作のうち、ボルト緩め動作及びドア把持運搬動作の詳細を説明するフローチャートである。
上述したように、図4に示すドア開き動作が終了すると、ボルト緩め動作及びドア把持運搬動作が開始する。より正確には、双腕ロボット11が軸S1,軸S2の回動動作によりドアの内側に入り込みドア把持位置まで移動する(図9のステップS21乃至S26参照)と、ボルト緩め動作が開始し、その後、当該ボルト緩め動作が正常に終了すれば、ドア把持運搬動作が開始される。
なお、第1アーム22R1、第2アーム22R2、及びドアH受け部材24の各々は、制御装置12(図1)の制御により駆動されるが、図26及び図27については、動作主体であるとして説明する。
また、ワークは図19等のドア91であるとして、以下の説明を行うが、図22のドア131等別機種のドアがワークとなった場合も、以下に説明する動作が実行される。
【0092】
図26のステップS41において、第1アーム22R1は、ドア把持位置に移動OKか否かを判定する。
予めドア把持位置として決定されている位置に双腕ロボット11が移動していない場合、ステップS41においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、予めドア把持位置として決定されている位置に双腕ロボット11が移動している場合、ステップS41においてYESであると判定され、処理はステップS42に進む。
【0093】
ステップS42において、ドアH受け部材24は、昇降シリンダ41により、ウレタンパッド42を上昇させる。
【0094】
ステップS43において、ドアH受け部材24は、計測シリンダ43によりH受け上端を検出したか否かを判定する。
ここで、H受け上端として、ウレタンパッド42がドア91の下部に接触して荷重がかかる位置が設定されているものとする。
ウレタンパッド42の上昇が停止してもH受け上端が検出されない場合、ステップS43においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、H受け上端が検出された場合、ステップS41においてYESであると判定され、処理はステップS44に進む。
【0095】
ステップS44において、ドアH受け部材24は、ウレタンパッド42の昇降の移動をロックする。
ステップS45において、ドアH受け部材24は、ロック検出OKか否かを判定する。
ここで、ドアH受け部材24は、図示はしないが、ウレタンパッド42の昇降の移動のロック及びアンロックを検出する機構(以下、「ロック検出機構」と呼ぶ)を有しているものとする。
ロック検出機構によりロックが検出されなかった場合、ステップS45においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、ロック検出機構によりロックが検出された場合、ステップS45においてYESであると判定され、処理はステップS46に進む。
なお、ドア開き動作では、図4を参照して上述したように、第1把持治具23R1のドア開きピン56がアウタパネル102の上辺とインナパネル101のパネル本体111の上辺との間の隙間に挿入される。従って、ステップS45においてYESであると判定される時点でも未だドア開きピン56が当該隙間に挿入されたままであった場合、ドア開きピン56が当該隙間から抜かれた後に、処理はステップS46に進む。
【0096】
ステップS46において、第1アーム22R1は、把持位置まで移動する。ここで、把持位置とは、エンドエフェクタたる第1把持治具23R1のドア把持パッド53,54が、ドア91の開口部120の点PA,PBの付近に配置される位置をいう。
ステップS47において、第1アーム22R1は、エンドエフェクタたる第1把持治具23R1のドア把持パッド53,54を用いて、ドア91を把持する。
【0097】
ステップS48において、第1アーム22R1は、把持OKか否かを判定する。
ここで、「把持OK」とは、第1把持治具23R1のドア把持パッド53,54の各々が、ドア91の開口部120の点PA,PBの各々で把持している状態をいう。
換言すると、上述した図25に示す状態、即ち、第1アーム22R1のエンドエフェクタたる第1把持治具23R1(より正確にはドア把持パッド53,54)、及びドアH受け部材24のウレタンパッド42によって、ドア91が保持されている状態が、把持OKである。
把持OKの場合にはドア91がしっかりと固定されるので、第2アーム22R2は、ボルトの緩め動作を適切に行うことができるようになる。
【0098】
換言すると、把持OKでない場合、第2アーム22R2はボルトの緩め動作を適切に行うことができないので、ステップS48においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、把持OKの場合、ステップS48においてYESであると判定され、処理はステップS49に進む。
【0099】
ここで、本例では、ドア91とボディ92とを仮固定しているボルトは2本存在し、緩める順番が予め決定されているものとする。そこで、以下、これらの2本のボルトを明確に区別すべく、1番目に緩められるボルトを「1本目ボルト」と呼び、2番目に緩められるボルトを「2本目ボルト」と呼ぶ。
【0100】
ステップS49において、第2アーム22R2は、1本目ボルト緩め位置まで移動する。ここで、1本目緩め位置とは、エンドエフェクタたる第2把持治具23R2のボルト緩めツール74が、ドア91に仮固定されている1本目ボルトの付近に配置される位置をいう。
ステップS50において、第2アーム22R2は、エンドエフェクタたる第2把持治具23R2のボルト緩めツール74を用いて、1本目ボルトを緩める。
なお、ボルト緩めツール74によるボルト緩め動作の詳細については、図28乃至図32を参照して後述する。
【0101】
ステップS51において、第2アーム22R2は、1本目ボルトの緩めがOKか否かを判定する。
ここでは、1本目ボルトが緩められて取り外された場合、1本目ボルトの緩めがOKと判定され、それ以外の場合NOと判定される。
即ち、何らかの原因で、1本目ボルトが取り外されなかった場合、ステップS51においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、1本目ボルトの緩めがOKの場合、ステップS51においてYESであると判定され、処理はステップS52に進む。
【0102】
ステップS52において、第2アーム22R2は、2本目ボルト緩め位置まで移動する。ここで、2本目緩め位置とは、エンドエフェクタたる第2把持治具23R2のボルト緩めツール74が、ドア91に仮固定されている2本目ボルトの付近に配置される位置をいう。
ステップS53において、第2アーム22R2は、エンドエフェクタたる第2把持治具23R2のボルト緩めツール74を用いて、2本目ボルトを緩める。
なお、ボルト緩めツール74によるボルト緩め動作の詳細については、図28乃至図32を参照して後述する。
【0103】
ステップS54において、第2アーム22R2は、2本目ボルトの緩めがOKか否かを判定する。
ここでは、2本目ボルトが緩められて取り外された場合、2本目ボルトの緩めがOKと判定され、それ以外の場合NOと判定される。
即ち、何らかの原因で、2本目ボルトが取り外されなかった場合、ステップS54においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、2本目ボルトの緩めがOKの場合、ステップS54においてYESであると判定され、処理はステップS55に進む。
【0104】
ステップS55において、第2アーム22R2は、図3(B)の把持位置状態から図3(A)の緩め位置状態に遷移させた後、把持位置に移動する。ここで、把持位置とは、エンドエフェクタたる第2把持治具23R2のドア把持パッド72が、ドア91の開口部120の点PCの付近に配置される位置をいう。
ステップS56において、第2アーム22R2は、エンドエフェクタたる第2把持治具23R2のドア把持パッド72を用いて、ドア91の開口部120の点PCを把持する。
【0105】
ステップS57において、第2アーム22R2は、把持OKか否かを判定する。
ここで、第2アーム22R2にとっての「把持OK」とは、図19に示すように、第2把持治具23R2のドア把持パッド72が、ドア91の開口部120の点PCで把持している状態をいう。
即ち、この段階では、第1アーム22R1にとっての「把持OK」、即ち、第1把持治具23R1のドア把持パッド53,54の各々が、ドア91の開口部120の点PA,PBの各々で把持している状態は成立している。従って、第2アーム22R2にとっての「把持OK」が成立すれば、図19に示すような3点把持が成立していることになり、このままドア把持運搬動作を開始することが可能になる。
【0106】
換言すると、第2アーム22R2にとっての「把持OK」が成立していない場合、ドア把持運搬動作を開始することができないので、ステップS57においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、第2アーム22R2にとっての「把持OK」が成立している場合、ステップS57においてYESであると判定され、処理はステップS58に進む。
【0107】
ステップS58において、双腕ロボット11は、ドア把持運搬動作を開始させる。
【0108】
ステップS59において、ドアH受け部材24は、ウレタンパッド42の昇降の移動をアンロックする。
ステップS60において、ドアH受け部材24は、アンロック検出OKか否かを判定する。
上述の図示せぬアンロック検出機構によりアンロックが検出されなかった場合、ステップS60においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、ロック検出機構によりアンロックが検出された場合、ステップS60においてYESであると判定され、処理はステップS61に進む。
【0109】
ステップS61において、ドアH受け部材24は、昇降シリンダ41により、ウレタンパッド42を下降させる。
【0110】
ステップS62において、ドアH受け部材24は、計測シリンダ43によりH受け戻り端を検出したか否かを判定する。
ここで、H受け戻り端として、H受け上端に対して下方に所定距離だけ離間した位置が設定されているものとする。
ウレタンパッド42の下降が停止してもH受け戻り端が検出されない場合、ステップS62においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、H受け戻り端が検出された場合、ステップS62においてYESであると判定され、処理は図27のステップS67に進む。
【0111】
ステップS67において、双腕ロボット11は、ドア91を把持したまま搬送ハンガーまで移動し、ドア91を搬送ハンガーに移載する。
ステップS68において、双腕ロボット11は、ドア91をクランプする。
ステップS69において、双腕ロボット11は、ドア91のクランプがOKか否かを判定する。
ドア91のクランプが失敗した場合、ステップS69においてNOであると判定されて、処理はステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、ドア91のクランプが成功した場合、ステップS69においてYESであると判定されて、処理はステップS70に進む。
【0112】
ステップS70において、双腕ロボット11は、ボルト排出位置まで移動する。ここで、ボルト排出位置とは、第2アーム22R2のエンドエフェクタたる第2把持治具23R2のボルト排出機構76により、1番目ボルト及び2番目ボルトの排出が可能になる位置をいう。
ステップS71において、双腕ロボット11は、ボルト排出機構76を用いて、1番目ボルト及び2番目ボルトを排出する。
ステップS72において、双腕ロボット11は、ボルト排出がOKか否かを判定する。
ボルトの排出が失敗した場合、ステップS72においてNOであると判定されて、処理はステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、ボルトの排出が成功した場合、ステップS72においてYESであると判定されて、処理はステップS73に進む。
【0113】
ステップS73において、双腕ロボット11は、初期状態の位置(図4参照)まで移動する。
これにより、ボルト緩め動作及びドア把持運搬動作は終了となる。
【0114】
なお、上述の如く、双腕ロボット11の主要な動作が失敗すると、処理はステップS63に進み、所定のエラー処理として次のような処理が実行される。
【0115】
ステップS63において、双腕ロボット11は、アラームを発し、自己の動作を停止させる。
従って、以下のステップS64乃至S66は、操作者による作業又は、操作者の手動操作による双腕ロボット11の動作となる点に注意する。
ステップS64において、操作者が、ドアを搬送する。
ステップS65において、操作者が、双腕ロボット11を初期状態の位置(図4参照)まで手動移動させる。
ステップS66において、操作者が、双腕ロボット11を再始動させるか、又は再始動できない場合等には双腕ロボット11をドア取り外し工程から除外する(修理等する)。
これにより、ボルト緩め動作及びドア把持運搬動作は終了となる。
【0116】
ここで、ドア取り外し工程のボルト緩め動作及びドア把持運搬動作の実現手法について、本実施形態の手法と、従来の手法との差異について説明する。
【0117】
従来の手法によれば、ドア取り外し工程に設置されるドア取り外しシステムは、双腕ロボットに加えて単腕ロボットを備えていた。このため、従来のドア取り外しシステムがドアを取り外す場合には、双腕ロボットの一対のアーム(マニュピュレータ)が上下からドアを把持し、単腕ロボットが、ドアをボディに仮固定しているボルトを緩めていた。
【0118】
このような従来の手法では、次のような第1及び第2の問題点が生じていた。
第1の問題点とは、ドアを把持するロボットと、ボルトを緩めるロボットとを別々に配置しなければならないという問題点である。
第2の問題点とは、ドアを上下から把持するためには、過般重量の重いロボットを採用する必要があり、その結果、ドア取り外しシステム全体が肥大化するという問題点である。
【0119】
これに対して、図25乃至図27を用いて上述した本実施形態の手法を適用することで、これらの従来の第1及び第2の問題点を解消することができる。
即ち、ドア取り外し工程のボルト緩め動作及びドア把持運搬動作を実現するためには、ドア91の荷重受け、ドア91の奥横方向のロック、ボルトの緩め、緩め後のドアの把持が必要になる。
そこで、本実施形態の双腕ロボット11では、一対のマニュピュレータとしての第1アーム22R1及び第2アーム22R2と、ドア(ドア91等)の荷重受けの装置として機能するドアH受け部材24と、が設けられている。
片腕たる第1アーム22R1とドアH受け部材24とでドアを支えながら、もう片方の第2アーム22R2がボルトを緩めて外し、その後、ボルトを外した第2アーム22R2が、ドア91を予め支えていた第1アーム22R1と協働してドアを把持して運搬する。
このように、従来の手法では2台のロボットが必要であったところ、本実施形態の手法を適用することで、1台の双腕ロボット11で済み、第1の問題が解決し、ひいては、設備のレイアウト性が向上する。
また、従来の手法ではドアは上下から把持されていたのに対して、本実施形態の手法では、第1アーム22R1又は第2アーム22R2に取り付けられた把持ツール(ドア把持パッド53,54,72)がドアの開口部に差し込まれることによって、当該ドアが把持される。これにより、ドアの重量を分散させることが可能になる。このようにして、本実施形態の手法では、レイアウト的に小さな双腕ロボット11を採用することができるので、第2の問題を解決することが可能になる。
さらに、本実施形態の手法では、ドアの外板面を把持することがないので、ドアの外傷を軽減できる。
【0120】
以上説明したように、本実施形態の双腕ロボット11は、自動車のボディにボルトで固定されたドア(ドア91等)を、当該ボディから取り外すドア取り外し装置として機能する。
このような機能を有する双腕ロボット11は、
ドアを把持する把持治具(本実施形態では第1把持治具23R1)を有する第1アーム22R1と、
ドアを固定しているボルトを外すボルト外し機構と、ドアを把持する把持治具を有する(本実施形態では、ドア把持パッド72とボルト緩めツール74とを共に含む第2把持治具23R2を有する)第2アーム22R2と、
ドアの重力方向の荷重を受ける荷重受けとしてのドアH受け部材24と、
を備える。
【0121】
より具体的には、双腕ロボット11は、
ドアのインナパネルの開口部に挿入して、ドアを把持する把持治具(本実施形態では第1把持治具23R1)を有する第1アーム22R1と、
ドアを固定しているボルトを外すボルト外し機構と、ドアのインナパネルの開口部に挿入して、ドアを把持する把持治具を有する(本実施形態では、ドア把持パッド72とボルト緩めツール74とを共に含む第2把持治具23R2を有する)第2アーム22R2と、
第1アーム22R1及び第2アーム22R2の架台としてのロボット本体21に設けられる、ドアの重力方向の荷重を受ける荷重受けとしてのドアH受け部材24と、
を備える。
【0122】
このような構成の双腕ロボット11は、
ボルト緩め動作では、
ドアの荷重を受ける荷重受け(ドアH受け部材24)をドアの下部にセットし、
双腕ロボット11の片腕(本実施形態では第1アーム22R1)で、ドアの重力方向とドアの横方向へのモーメントを受け、もう一方の腕(本実施形態では第2アーム22R2)で、ドアを固定しているボルトを外し、
ドア把持運搬動作では、
双腕ロボット11の片腕(本実施形態では第1アーム22R1)で、ドアの重力方向とドアの横方向へのモーメントを受けると共に、もう一方の腕(本実施形態では第2アーム22R2)でもドアを把持する。
【0123】
これにより、本実施形態では、上述の(1)乃至(5)の効果に加えてさらに、次の(6)乃至(8)の効果を奏することが可能になる。
(6)ドア取り外し工程において、少なくとも1つのドアに対しては、1台の双腕ロボット11のみを設置すれば足りる。これにより、ドア取り外し工程で設置されるロボットの台数が削減でき、設備のレイアウト性が向上する。
(7)開口部に把持ツールを挿入することで、ロボットにかかるドアの重量を分散させることができるので、双腕ロボット11をより小さな構成で実現できる。
(8)ドアの外板面を把持することがないので、当該ドアの外傷を軽減できる。
【0124】
以上、図25乃至図27を参照して、ドア取り外し工程における双腕ロボット11の動作のうち、ボルト緩め動作(図5参照)及びドア把持運搬動作(図6参照)の詳細について説明した。
次に、当該ボルト緩め動作に用いられるボルト緩めツール74の詳細について、図28乃至図32を参照して説明する。
【0125】
図28は、ボルトを緩める前のボルト緩めツール74の縦断面図である。
ボルト緩めツール74は、双腕ロボット11の第2把持治具23R2におけるフレーム73の長手方向の他端に取り付けられており(図3参照)、図28に図示せぬ自動車のボディにドアを仮固定しているボルト250を緩めて取り外すことができる。
【0126】
ボルト緩めツール74は、筒201と、ギア202と、摺動ソケット203と、流体機構204と、軸受205と、マグネット206と、を備える。
なお、ボルト250は、ねじ胴部251と、ねじ胴部251の先端に設けられたねじ頭部252と、ねじ頭部252とねじ胴部251との間に設けられたフランジ部253と、を備える。
【0127】
図29は、筒201及びギア202の外観構成を示す斜視図である。
筒201は、六角形の断面形状の摺動孔を有する短円筒状に形成される。筒201は、摺動孔に沿って摺動ソケット203(図28)を軸力方向に摺動可能に配置することで、摺動ソケット203を軸方向に沿って案内する。
ギア202は、筒201の軸方向の略中央近辺において筒201の外側面と係合し、図1の制御装置12の制御によって、図示せぬ駆動源から供給される駆動力により、筒201を周方向に回転させる。
【0128】
図28に戻り、摺動ソケット203は、側縁部211と、係合部212と、孔部213と、を備える。
側縁部211は、略円筒形状に形成される。
側縁部211の前進端側(図28、図31、図32の左側)の内方は、ボルト250のねじ頭部252を嵌合可能な寸法に形成され、側縁部211とボルト250とは、軸方向には摺動可能に、かつ、周方向には互いに同期して回転可能に係合される。側縁部211の後退端側(図28、図31、図32の右側)の内方は、後述の流体機構204の基部221を摺動可能な寸法に形成される。
また、側縁部211の前進端側の内径寸法は、ボルト250のフランジ部253の径寸法よりも小さく形成され、また、側縁部211の前進端側の外径寸法は、ボルト250のフランジ部253の径寸法よりも大きく形成される。これにより、ボルト250のうちねじ頭部252のみが摺動ソケット203に収納されることになり、ボルト250は、フランジ部253が設けられている場合であっても引っかかることなく、摺動ソケット203と共に筒201の内側を軸方向に自由に摺動することが可能になる。
係合部212は、中心に孔部213が形成された平板状に形成され、側縁部211の内方において側縁部211の軸方向の間に配置される。
【0129】
図30は、筒201及び摺動ソケット203の構成を示す横断面図である。
図30A、図30Bに示すように、筒201の内径寸法d1は、摺動ソケット203の側縁部211の外形寸法d2と略同一の寸法に形成され、摺動ソケット203は、筒201の内方において軸方向に沿って摺動可能に配置される。
【0130】
図28に戻って、流体機構204は、基部221と、流体通路222と、を備える。
基部221は、短円柱状に形成され、側縁部211の内部の後退端側において、側縁部211の軸方向に沿って摺動可能に配置される。
流体通路222は、長筒状に形成され、エアーを挿通し得る流路を内部に備える。即ち、流体通路222は、図1の制御装置12の制御によって、内部の流路を通じて前進端側にエアーを排出する。
流体通路222の流路は、長手方向の一端部で基部221に貫通し、長手方向の他端部で、エアーが貯留された図示せぬ流体貯留源に接続されている。このような流路を有する流体通路222は、長手方向の所定位置に配置された軸受205により固定される。
即ち、流体機構204の流路は、図示せぬ流体貯留源に貯留されているエアーを、流体通路222を通じて、長さ方向の一端部に配置されている基部221から排出する。すると、排出されたエアーは、その勢いにより、ボルト250を摺動ソケット203ごと押圧して前進端側に押し出す。
また、摺動ソケット203は、図1の制御装置12の制御によって、流体通路222からのエアーの排出を停止し、一端部から他端部に対しエアーを逆流させる。これにより、後退端側から前進端側へのエアーによる押圧は解除される。この状態で、ボルト緩めツール74が、図1の制御装置12の制御によって、ボルト250を回して緩める。すると、ボルト250は軸力により浮き上がって後退端側へ移動し、摺動ソケット203は移動されたボルト250ごと前進端側から後退端側へ筒201内を摺動して移動する。
なお、流体通路222の流路からエアーを排出しているが、流路から排出されるものは、これに限られるものではなく、気体や液体等、当該流路から排出し得る性状を有する流体であればよい。
流体機構204による摺動ソケット203及びボルト250の動作の詳細については、図31及び図32を参照して後述する。
【0131】
マグネット206は、基部221の前進端側の端部に設けられる。マグネット206は、図31を参照して後述するように、摺動ソケット203が後退端側に摺動して係合部212が当接した場合、当該係合部212の逆側にねじ頭部252が当接しているボルト250を、その磁力により保持する。
【0132】
以上、図3の第2把持治具23R2のうち、ボルト緩めツール74の構成について、図28乃至図30を参照して説明した。
次に、ボルト緩めツール74によりボルト250を緩める動作について、上述した図28に加えて、図31及び図32を参照して説明する。
【0133】
ボルト250を緩める前のボルト緩めツール74の状態は、図28に示すようになる。
即ち、ボルト緩めツール74は、初めに、図1の制御装置12の制御により、図28に示す状態になるように、摺動ソケット203の位置合わせを行う。
具体的には、流体機構204の流体通路222は、制御装置12の制御により、図示せぬ流体貯留源から供給されるエアーを流路を通じて前進端側に排出する。この時排出されるエアーの圧力は、本実施形態においては、1[kgf/cm2]に設定される。
この場合、流体通路222から排出されたエアーは、摺動ソケット203の係合部212に衝突し、その押圧力により摺動ソケット203を前進端側へ移動させる。
従って、ボルト250を緩める前にあっては、図1の制御装置12の制御により、摺動ソケット203を前進端側へ移動させることにより、摺動ソケット203をボルト250に係合させる位置で位置合わせすることができる。
この状態において、摺動ソケット203の前進端の内側の係合部212にボルト250のねじ頭部252が係合される位置まで、第2把持治具23R2(図1,図3)を移動させることにより、ボルト250のねじ外し位置に摺動ソケット203をセットすることができる。
【0134】
図31は、ボルト250を緩めている最中のボルト緩めツール74の縦断面図である。
ボルト緩めツール74は、図1の制御装置12の制御により、ボルト250を緩め、図示せぬ車のボディから取り外す。
具体的には、ギア202は、制御装置12の制御により、図示せぬ駆動源から供給される駆動力によりトルクを伝達し、筒201を周方向に回動させる。
この場合、周方向に駆動された筒201と、摺動ソケット203とは、互いに周方向に対し同期して回転するように係合されているため、筒201の回動に連動してトルクを伝達し摺動ソケット203も同様に周方向に回転する。
また、この場合、摺動ソケット203とボルト250のねじ頭部252とは、互いに周方向に対し同期して回動するように連結されているため、摺動ソケット203の回転に連動してトルクを伝達しボルト250も同様に周方向に回動する。
この場合、摺動ソケット203は、図1の制御装置12の制御によって、流体通路22からのエアーの排出を停止し、一端部から他端部に対しエアーを逆流させている。従って、摺動ソケット203に対する後退端側から前進端側へのエアーによる押圧は解除されている。
従って、この状態で、図1の制御装置12の制御によってボルト緩めツール74がボルト250を回して緩めることにより、ボルト250は軸力により浮き上がって後退端側へ移動し、摺動ソケット203は移動されたボルト250ごと前進端側から後退端側へ筒201内を摺動する。
そして、後退端側へ移動されたボルト250は、摺動ソケット203の流体機構204の基部221の前進端側の端部に設けられたマグネット206に当接することで吸着されロックされる。より正確には、ボルト250のねじ頭部252が当接した摺動ソケット203の係合部212がマグネット206に当接することで、ボルト250は係合部212越しにマグネット206に吸着されて固定される。
従って、ボルト250を緩める場合にあっては、図1の制御装置12の制御により、ボルト緩めツール74は、ギア202を駆動して筒201及び摺動ソケット203を回動することで、ボルト250を回して緩めることができる。そして、ボルト緩めツール74は、ボルト250のねじ頭部252(より正確には、摺動ソケット203の係合部212)を、流体機構204に設けられているマグネット206に当接させることができる。これにより、ボルト250は、マグネット206に吸着されて、ボルト緩めツール74の内部に保持される。
【0135】
図32は、ボルト250を排出している状態のボルト緩めツール74の縦断面図である。
図1の制御装置12の制御により、第2把持治具23R2の状態は、図3(A)の緩め位置状態から図3(B)の把持位置状態に遷移する。
この図3(B)の把持位置状態で、ボルト緩めツール74は、制御装置12の制御により、保持しているボルト250を外部のボルト排出機構76(図3)に排出する。
具体的には、流体機構204の流体通路222は、制御装置12の制御により、図示せぬ流体貯留源から供給されるエアーを、流路を通じてボルト250側に排出する。この時排出されるエアーの圧力は、本実施形態においては、1[kgf/cm2]に設定される。
この場合、流体通路222から排出されたエアーは、摺動ソケット203の係合部212に衝突し、その押圧力により摺動ソケット203をボルト250ごと前進端側へ移動させる。
この時、ボルト250が前進端側に移動されることにより、ボルト250とマグネット206とが離間され、ボルト250とマグネット206との間の磁力が弱まる結果、マグネット206によるボルト250の吸着が解除されロックが開放される。
このように、図1の制御装置12の制御によるエアーの排出によって、摺動ソケット203を前進端側へ移動させることにより、摺動ソケット203内のボルト250の保持を解除させ、ボルト250を外部のボルト排出機構76(図3)に排出することができる。
【0136】
ここで、ドア取り外し工程のボルト緩め動作に適用される手法について、本実施形態の手法と、従来の手法との差異について説明する。
【0137】
従来においては、電動ナットランナ等駆動源を持たせたロボットにて、ボルトを緩める手法が採用されていた。
即ち、従来においては、外れてくるボルトにあわせてロボットをフローティングさせたり、ツールにフローティング機構を付けてボルトの軸力でツールがフローティングする手法が採用されていた。
【0138】
このような従来の手法では、次のような第1乃至第3の問題点が生じていた。
第1の問題点とは、ものが大きいため、狭隘部や干渉が多い場では使用しにくいという問題点である。
第2の問題点とは、六角ナットでは使用できるが、長いボルトやフランジボルトには使用できないという問題点である。
第3の問題点とは、ロボットにてフローティングさせる場合、ボルトの動きにロボットの動きをあわせる必要があり、ロボットの移動動作のティーチングが複雑化される。
第4の問題点とは、クリアランスの少ない狭隘部にてツールがフローティングするので、フローティング量分ツールのサイズが小さくなくてはならないという問題点である。
【0139】
これに対して、図28乃至図32を用いて上述した本実施形態の手法を適用することで、これらの従来の第1乃至第4の問題点を解消することができる。
即ち、本実施形態の手法では、ボルト250を外す際ボルト緩めツール74を動かすことなく、摺動ソケット203内でボルト250を収納させることができる。
また、本実施形態のボルト緩めツール74は、ボルト250を緩めるためのトルクを摺動ソケット203を介して伝達することにより、ボルト250を軸力方向に摺動し、ボルト250をボルト緩めツール74内に収納することができる。これにより、従来は動かさなければならなかったボルト緩めツールを動かす必要がなくなり、第1の問題、第3の問題及び第4の問題が解消する。
また、本実施形態のボルト緩めツール74は、ボルト250を摺動ソケット203内に収納した後、マグネット206によりボルト250を吸着してロックすることができる。
また、本実施形態のボルト緩めツール74は、先行技術のように、ナットとボルトがそれぞれ単体でソケット内を摺動するのではなく、フランジボルトのようにナットとボルトが勘合した状態で摺動ソケット203内に収納される。そして、摺動ソケット203は、摺動ソケット203の外径形状に削られた筒201内を軸力方向に沿って摺動することができる。即ち、フランジボルトのように半径方向に突出したボルトであっても、緩めて取りはずし収納することができる。これにより、従来は摺動させることができなかった半径方向に突出したフランジボルト等であっても、ボルトの摺動及び排出を行うことができるようになり、第2の問題が解消する。
また、本実施形態のボルト緩めツール74は、ボルト250を緩めるための軸力方向への摺動及びボルト250の排出はエアーにより行われる。これにより、ボルトの動きに合わせてロボットを動かす必要がなくなり、第3の問題が解消する。
【0140】
このように、本実施形態のドア取り外しシステム1にソケットとして適用されたボルト緩めツール74は、
締結部品としてのボルト(上述の例ではボルト250)の取り外しに使用するためのソケットであって、
締結部品と係合する係合部212と、
係合部212を内側に有する摺動ソケット203と、
摺動ソケット203が摺動し、かつ、共に回転する回転自在な筒201と、
摺動ソケット203の後退端側に設けられ、係合部212の外側と接するマグネット206と、
摺動ソケット203を前進端側に押し出す流体(本実施形態ではエアー)を係合部212の外側に向かって排出する流体機構204と、
を備えている。
【0141】
これにより、本実施形態では、上述の(1)乃至(8)の効果に加えてさらに、次の(9)の効果を奏することが可能になる。
(9)ボルト250を取り外すときには、筒201を回転させることにより、係合部212に係合されたボルト250を回転させ緩めて取り外すことができるのみならず、緩めて外したボルト250をマグネット206で吸着し、摺動ソケット203内に保持することができる。
また、ボルト250の排出時には、筒201を逆方向に回転させることにより、ボルト250とマグネット206との間の磁力を弱めてマグネット206による保持を解除し、かつ、流体機構204から排出するエアーの勢いにより、ボルト250を摺動ソケット203外に排出することができる。
これにより、マグネット206と流体機構204とに基づきボルト250の緩め及び排出を行うことができるため、コンパクトなスペースでドアの取り外しを行うことができる。
【0142】
なお、本発明は本実施形態に限定されるものではなく、本発明の目的を達成できる範囲での変形、改良等は本発明に含まれるものである。
【0143】
例えば、双腕ロボット11の第1アーム22R1や第2アーム22R2に取り付けられるエンドエフェクタは、上述の例に特に限定されず、上述の各種動作を実現可能なツールであれば足りる。
【0144】
なお、本明細書において、ドア取り外しシステムの動作を記述するステップは、その順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的或いは個別に実行される処理をも含むものである。
【0145】
また、本明細書において、システムとは、複数の装置や処理部により構成される装置全体を表すものである。
【符号の説明】
【0146】
1 ドア取り外しシステム
11 双腕ロボット
12 制御装置
21 ロボット本体
22R1 第1アーム
22R2 第2アーム
23R1 第1把持治具
23R2 第2把持治具
24 ドアH受け部材
25 架台
31 基台部
32 第1旋回部
33 第2旋回部
41 昇降シリンダ
42 ウレタンパッド
43 計測シリンダ
51 支持部
52 フレーム
53 ドア把持パッド
54 ドア把持パッド
55 機種切替シフト
56 ドア開きピン
57 センサ
71 支持部
72 ドア把持パッド
73 フレーム
74 ボルト緩めツール
75 先端ツール切替機構
76 ボルト排出機構
171 把持部
172 フローティング機構
201 筒
202 ギア
203 摺動ソケット
204 流体機構
205 軸受
206 マグネット
211 側縁部
212 係合部
213 孔部
221 基部
222 流体通路
【技術分野】
【0001】
本発明は、自動車のドアを取り外すことが可能なドア取り外しシステムに適用可能な、ドア把持装置及び方法に関する。詳しくは、本発明は、小型化されたツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能な、ドア把持装置及び方法に関する。
【背景技術】
【0002】
従来より、自動車の製造工程では、ボルトでドアがボディに仮固定された自動車に対して塗装が行われた後、ボルトが取り外されることで、ドアがボディから取り外され、ドアとボディとが別々のラインで組み立てられている。
このように、自動車の製造工程の中には、ドアをボディから取り外すための工程(以下、「ドア取り外し工程」と呼ぶ)が存在する。
【0003】
このようなドア取り外し工程で用いられるドア取り外しシステムが、例えば特許文献1に記載されている。
特許文献1に記載のドア取り外しシステムは、ボディの両側に位置しナットランナを備えた2台の第1ロボットと、ボディの両側に位置しドアを把持する2台の第2ロボットとを備えており、次のように動作する。
即ち、第1ロボットが、ドアが開いた状態で、ナットランナを用いてボルトを緩めてドアとボディとの連結を解除する。その後、第2ロボットが、ドアを把持しつつ搬送する。
ここで、第2ロボットは、単腕ロボットであり、1枚のドアを把持するための専用のドア把持ハンドを有している。このドア把持ハンドの構造は、ドアの形状や構造に応じて、機種毎に異なっている。
【0004】
しかしながら、特許文献1に記載のドア取り外しシステムでは、1枚のドアを1台の単腕ロボットで支持して搬送するため、ロボットが大型化し、ロボットの占有スペースが大きくなる上に、ロボットの汎用性が低下する、という問題があった。
また、多機種を生産するラインでは、機種毎にドアの形状や構造が異なるため、複数種類の治具が必要になり、コストが上昇する、という問題があった。
さらに、製造ラインで製造する機種が変更される毎に、把持治具を交換したり調整したりすることになり、サイクルタイムが長期化する、という問題があった。
【0005】
そこで、これらの問題を解決すべく、本願出願人は、1枚のドアを把持しつつ搬送するためのロボットとして、双腕ロボットを採用したドア取り外しシステムについて、特許文献2に既に開示している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平9−103925号公報
【特許文献2】特開2009−214701号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献2に記載のドア取り外しシステムでは実現できなかった、小型化されたツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが要求されている状況である。
【0008】
本発明は、このような状況に鑑みてなされたものであり、小型化されたツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能な、ドア把持装置及び方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明のドア把持装置は、
自動車のドア(例えば実施形態における自動車のドア91)を把持するドア把持装置(例えば実施形態における双腕ロボット11)であって、
前記ドアの重力方向の力を受ける荷重受け(例えば実施形態におけるドアH受け部材24)と、
前記ドアを把持する把持ツール(例えば実施形態における第1把持治具23R1)と、
を備え、
前記把持治ツールは、2つの把持点(例えば実施形態における点PA,PB)の相対距離が可変な、前記ドアのインナパネルの開口部(例えば実施形態におけるドア91の開口部120等)の前記2つの把持点の各々に当接する2つのパッド(例えば実施形態におけるドア把持パッド53,54)を有しており、
前記2つのパッドのうち、一方のパッド(例えば実施形態におけるドア把持パッド53)は、前記ドアの荷重方向の力を受ける方向に開口部の把持点(例えば実施形態における点PA)に当接し、他方のパッド(例えば実施形態におけるドア把持パッド54)は、前記荷重受けと前記一方のパッドとにより発生するモーメントを受ける方向に開口部の別の把持点(例えば実施形態における点PB)に当接する、
ことを特徴とする。
【0010】
この発明によれば、荷重受けと1つの把持ツールとにより、ドアを把持することができるため、ドアをボディから取り外す際に必要なロボットの腕が1本で済む。よって、ドア取り外し工程で、少なくとも1つのドアに対しては、双腕ロボット単体を設置すれば済む。
また、ドアの開口部にパッドを当接させるのみでよいので、把持のための動力を必要とせず、把持ツールの小型化を図ることが可能になる。
さらにまた、ドアのインナパネルの開口部を把持に使用するため、ドアに傷がつかない。
以上まとめると、小型化された把持ツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能になる。
【0011】
本発明のドア把持方法は、上述の本発明のドア把持装置に対応する方法である。従って、上述の本発明のドア把持装置と同様の各種効果を奏することが可能になる。
【発明の効果】
【0012】
本発明によれば、小型化された把持ツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能になる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係るドア取り外しシステムの概略外観構成を示す斜視図である。
【図2】ドア取り外しシステムの双腕ロボットのうち、第1把持治具の概略外観構成を示す斜視図である。
【図3】ドア取り外しシステムの双腕ロボットのうち、第2把持治具の概略外観構成を示す斜視図である。
【図4】ドア開き動作の概略を説明する図である。
【図5】ボルト緩め動作の概略を説明する図である。
【図6】ドア把持運搬動作の概略を説明する図である。
【図7】双腕ロボットの第1アームの軌跡を説明する図であって、第1アーム側から見た場合の双腕ロボットの上半部の側面図である。
【図8】双腕ロボットの第1アームの軌跡を説明する図であって、双腕ロボットの上面図である。
【図9】ドア取り外し工程における双腕ロボットの移動動作を説明するフローチャートである。
【図10】図9のフローチャートの各ステップの各々の動作時における、双腕ロボットの位置及び状態をそれぞれ示す上面図である。
【図11】図9のフローチャートの各ステップの各々の動作時における、双腕ロボットの位置及び状態をそれぞれ示す上面図である。
【図12】図9のフローチャートの各ステップの各々の動作時における、双腕ロボットの位置及び状態をそれぞれ示す上面図である。
【図13】図9のフローチャートの各ステップの各々の動作時における、双腕ロボットの位置及び状態をそれぞれ示す上面図である。
【図14】図9のフローチャートの各ステップの各々の動作時における、双腕ロボットの位置及び状態をそれぞれ示す上面図である。
【図15】図9のフローチャートの各ステップの各々の動作時における、双腕ロボットの位置及び状態をそれぞれ示す上面図である。
【図16】図9のフローチャートの各ステップの各々の動作時における、双腕ロボットの位置及び状態をそれぞれ示す上面図である。
【図17】図9のフローチャートに従って双腕ロボットが移動動作する場合における、S1軸,S2軸,及びドアの位置関係を示す上面図である。
【図18】ドア取り外し工程におけるロボットの軌跡の概略を示す上面図である。
【図19】ドア取り外しシステムのドア把持運搬動作におけるドアの3点把持の手法を説明する図であって、内側からみたドアの概略外観構成の斜視図である。
【図20】ドア取り外しシステムのドア把持運搬動作におけるドアの3点把持位置の力関係を示す図であって、内側からみたドアの概略外観構成の斜視図である。
【図21】ドア取り外しシステムのドア把持運搬動作におけるドアの3点把持位置の力関係を示す図であって、前方側からみたドアの概略構成の断面図である。
【図22】ドア取り外しシステムのドア把持運搬動作におけるドアの3点把持位置の力関係を示す図であって、図20とは別の車種のドアを内側からみた場合の概略外観構成の斜視図である。
【図23】ドア取り外しシステムのドア把持運搬動作におけるドアの3点把持位置の力関係を示す図であって、図22の車種のドアを前方側からみた場合の概略構成の断面図である。
【図24】ドア把持パッドの概略外観構成を示す側面図である。
【図25】ボルト緩め動作におけるドアの把持の手法を説明する図であって、内側からみた場合のドアの概略外観構成を示す側面図である。
【図26】ドア取り外し工程における双腕ロボットの動作のうち、ボルト緩め動作及びドア把持運搬動作の詳細を説明するフローチャートである。
【図27】ドア取り外し工程における双腕ロボットの動作のうち、ボルト緩め動作及びドア把持運搬動作の詳細を説明するフローチャートである。
【図28】ボルトを緩める前のボルト緩めツールの縦断面図である。
【図29】筒及びギアの外観構成を示す斜視図である。
【図30】筒及び摺動ソケットの構成を示す横断面図である。
【図31】ボルトを緩めている最中のボルト緩めツールの縦断面図である。
【図32】ボルトを排出している状態のボルト緩めツールの縦断面図である。
【発明を実施するための形態】
【0014】
以下、本発明の一実施形態を図面に基づいて説明する。
図1は、本発明の一実施形態に係るドア取り外しシステムの概略外観構成を示す斜視図である。
【0015】
ドア取り外しシステム1は、双腕ロボット11と、制御装置12と、を備える。
双腕ロボット11は、制御装置12の制御の下、図1に図示せぬ自動車のボディにボルトで仮固定されたドアを、当該ボディから取り外すことができる。
【0016】
双腕ロボット11は、ロボット本体21と、第1アーム22R1と、第2アーム22R2と、第1把持治具23R1と、第2把持治具23R2と、ドアH受け部材24と、架台25と、を備える。
【0017】
ロボット本体21は、基台部31と、第1旋回部32と、第2旋回部33と、を備える。
基台部31は、架台25の上に固定して取り付けられる。
第1旋回部32は、基台部31の上部に、略垂直方向の回転軸S1を中心に旋回可能に取り付けられる。
第2旋回部33は、第1旋回部32の上部に、略垂直方向の回転軸S2を中心に旋回可能に取り付けられる。
ここで、回転軸S1と回転軸S2とは、水平方向(床面と略平行な方向)に所定距離だけ離間して相互に独立して設定されている。即ち、第1旋回部32と第2旋回部33の各々は、制御装置12の制御によって、相互に独立して旋回する。
なお、第1旋回部32及び第2旋回部33のさらなる詳細については、図7乃至図18を参照して後述する。
【0018】
第1アーム22R1及び第2アーム22R2の各々は、ロボット本体21の第2旋回部33の両端の上部に、回転軸S2を挟んで取り付けられる。
第1アーム22R1及び第2アーム22R2の各々は、多関節マニュピュレータとして構成されている。即ち、第1アーム22R1及び第2アーム22R2の各々は、複数の関節と、複数の連結部材と、各関節を回転させるサーボモータと、サーボモータの位置、速度、電流等の各種状態を検出する検出器と、を備える。
各サーボモータによる各関節の回転動作と、それらの回転動作に連動する各連結部材の移動動作との組み合わせにより、第1アーム22R1及び第2アーム22R2の各々の全体の動作が相互に独立して実現される。
【0019】
第1把持治具23R1は、第1アーム22R1の先端部にエンドエフェクトとして取り付けられ、第1アーム22R1の移動動作に伴い、自動車のドア等まで移動する。すると、第1把持治具23R1は、制御装置12の制御に従って、自動車のドアを把持する等の各種動作を行う。
なお、第1把持治具23R1の更なる詳細については、図2を参照して後述する。
【0020】
第2把持治具23R2は、第2アーム22R2の先端部にエンドエフェクトとして取り付けられ、第2アーム22R2の移動動作に伴い、自動車のドア等まで移動する。すると、第2把持治具23R2は、制御装置12の制御に従って、自動車のドアとボディとを仮固定しているボルトを取り外したり、当該ドアを把持する等の各種動作を行う。
なお、第2把持治具23R2の更なる詳細については、図3を参照して後述する。
【0021】
ドアH受け部材24は、略垂直方向に昇降可能に架台25に対して取り付けられ、自動車のドアを下から略垂直上向き方向に受け止めるように把持する。
具体的には、ドアH受け部材24は、昇降シリンダ41と、ウレタンパッド42と、計測シリンダ43と、を備えている。
昇降シリンダ41は、ウレタンパッド42を任意の位置に昇降するシリンダである。ウレタンパッド42は、自動車のドアの下部に係止し、当該ドアを略垂直上向き方向に受け止めるように把持する。計測シリンダ43は、ウレタンパッド42に併せて昇降するシリンダであり、そのストローク位置によって、ウレタンパッド42の垂直方向の位置を計測することができる。
なお、ドアH受け部材24のさらなる詳細については、図5、図24、及び図25を適宜参照して後述する。
【0022】
架台25は、床面に固定して配置され、上述したように、第1アーム22R1及び第2アーム22R2が搭載されたロボット本体21(より正確には基台部31)と、ドアH受け部材24とを取り付ける。
【0023】
制御装置12は、双腕ロボット11の動作を制御する。
具体的には、制御装置12は、ロボット本体21における第1旋回部32及び第2旋回部33の各々の相互に独立した旋回を制御する。
また、制御装置12は、第1アーム22R1及び第2アーム22R2の各々に対して相互に独立した位置決め制御を行う。
また、制御装置12は、第1把持治具23R1及び第2把持治具23R2の動作を制御する。
さらにまた、制御装置12は、ドアH受け部材24の昇降の動作を制御する。
【0024】
図2は、このような構成のドア取り外しシステム1の双腕ロボット11のうち、第1把持治具23R1の概略外観構成を示す斜視図である。
第1把持治具23R1は、支持部51と、フレーム52と、ドア把持パッド53,54と、機種切替シフト55と、ドア開きピン56と、センサ57と、を備えている。
【0025】
支持部51は、第1アーム22R1の先端部に取り付けられることで、第1把持治具23R1を第1アーム22R1に対して支持する。
フレーム52は支持部51に取り付けられ、その長手方向が第1アーム22R1の先端部の面と略平行に延在している。
【0026】
ドア把持パッド53は、フレーム52に対して突出するように支持部51に取り付けられ、図2に図示せぬ自動車のドアの一点を把持する。
ドア把持パッド54は、フレーム52に対して突出し、かつ、フレーム52の長手方向と略平行にドア把持パッド53から離間して、機種切替シフト55に取り付けられ、図2に図示せぬ自動車のドアの一点を把持する。
換言すると、図2に図示せぬ自動車のドアのうち所定方向に離間している2点が、当該所定方向とフレーム52の長手方向とが略平行となっている状態(そのように第1アーム22R1が移動した状態)におけるドア把持パッド53,54によりそれぞれ把持される。なお、ドアの把持の手法のさらなる詳細については、図5、及び図19乃至図24を参照して後述する。
機種切替シフト55は、フレーム52に取り付けられ、ドアを取り外す対象の自動車の機種に応じて、フレーム52の長手方向にスライドすることによって、ドア把持パッド54の位置をフレーム52の長手方向に沿って移動させる。即ち、機種切替シフト55は、フレーム52の長手方向におけるドア把持パッド53,54の離間距離を、距離LAから距離LBの範囲内で可変させる機能を有している。
【0027】
ドア開きピン56は、フレーム52に対して、ドア把持パッド53とは略垂直方向に突出するように支持部51に取り付けられ、図2に図示せぬ自動車のドアを開くときに用いられる。
センサ57は、フレーム52に対して、ドア把持パッド53とは略垂直方向に突出するように支持部51に取り付けられ、図2に図示せぬ自動車のドアのうち、ドア開きピン56の挿入位置を検出する。
ドア開きピン56及びセンサ57を用いた自動車のドアを開く動作については、図4を参照して後述する。
【0028】
以上、図1の構成のドア取り外しシステム1の双腕ロボット11のうち、第1把持治具23R1の概略外観構成について、図2を参照して説明した。
次に、当該双腕ロボット11のうち、第2把持治具23R2の概略外観構成について、図3を参照して説明する。
【0029】
図3は、ドア取り外しシステム1の双腕ロボット11のうち、第2把持治具23R2の概略外観構成を示す斜視図である。
第2把持治具23R2は、支持部71と、ドア把持パッド72と、フレーム73と、ボルト緩めツール74と、先端ツール切替機構75と、ボルト排出機構76と、を備えている。
【0030】
支持部71は、第2アーム22R2の先端部に取り付けられることで、第2把持治具23R2を第2アーム22R2に対して支持する。
【0031】
ドア把持パッド53は、突出するように支持部71に取り付けられ、図3に図示せぬ自動車のドアの一点を把持する。
ただし、図3(A)の状態では、支持部71に対して、後述のボルト緩めツール74の方がドア把持パッド53より突出しているので、ドア把持パッド53によるドアの一点の把持が困難になる。
そこで、図3(B)の状態、即ち、後述のボルト緩めツール74が支持部71側に折り畳まれて、ドア把持パッド53のみが突出している状態で、ドア把持パッド53が、ドアの一点を把持する。
この場合、必要に応じて、ドア把持パッド53は、図2の第1把持治具23R1のドア把持パッド53,54と共に、ドアの3点(所定形状の三角形の頂点)を把持することができる。なお、このようなドアの把持の仕方を、「3点把持」と呼ぶ。3点把持の詳細については、図19乃至図24を参照して後述する。
【0032】
フレーム73においては、長手方向の一端が後述の先端ツール切替機構75に接続され、長手方向の他端には、ボルト緩めツール74が取り付けられている。
フレーム73は、後述の先端ツール切替機構75の軸rを中心に回動可能に構成されており、その配置状態として図3(A)又は図3(B)の状態を取ることができる。
フレーム73の配置状態が図3(A)の状態の場合、上述したように、ドア把持パッド72が機能して、ドアの一点の把持が行われる。なお、図3(A)の状態を、以下、「緩め位置状態」と呼ぶ。
これに対して、フレーム73の配置状態が図3(B)の状態の場合、ボルト緩めツール74が機能する。なお、図3(B)の状態を、以下、「把持位置状態」と呼ぶ。
【0033】
ボルト緩めツール74は、図3に図示せぬ自動車のドアがボディに仮固定されているボルトを加工対象として、図1の制御装置12の制御の下、当該ボルトを緩める動作をする。
なお、ボルト緩めツール74によるボルトの緩めの動作の詳細については、図5、及び図26乃至図31を参照して後述する。
【0034】
先端ツール切替機構75は、図1の制御装置12の制御の下、図3に図示せぬ自動車のドアを把持する場合には、把持位置状態になるまでフレーム73を回動させて保持し、当該自動車のドアがボディに仮固定されているボルトを緩める場合には、緩め位置状態になるまでフレーム73を回動させて保持する。換言すると、先端ツール切替機構75は、その呼称が示す通り、第2把持治具23R2において機能する先端ツールとして、ドア把持パッド72とボルト緩めツール74のうち一方から他方へ切り替える機能を有している。
【0035】
ボルト排出機構76は、支持部71に対して、先端ツール切替機構75の軸rと略方向に延在するように取り付けられ、図3(B)の把持位置状態から図3(A)の緩め位置状態に遷移すると、ボルト緩めツール74に収納されたボルトを外部に排出する。
なお、ボルト緩めツール74にボルトが収納される点については、図26乃至図31を参照して後述する。
【0036】
以上、図1乃至図3を参照して、ドア取り外しシステム1の構成について説明した。
次に、図4以降の図面を参照して、ドア取り外しシステム1の動作について説明する。
【0037】
ドア取り外しシステム1はドア取り外し工程に設置されるため、その動作としては、自動車のドアをボディから開く動作(以下、「ドア開き動作」と呼ぶ)と、ドアとボディとを仮固定しているボルトを緩めて取り外す動作(以下、「ボルト緩め動作」と呼ぶ)、ドアを把持して運搬する動作(以下、「ドア把持運搬動作」と呼ぶ)と、の3種類に大別される。
図4は、ドア開き動作の概略を説明する図である。
図5は、ボルト緩め動作の概略を説明する図である。
図6は、ドア把持運搬動作の概略を説明する図である。
【0038】
ドア取り外し工程の初期状態とは、自動車のボディがライン上を搬送され、ドア取り外しシステム1に供給された状態であって、図4に示すように、ドア91は閉じた状態である。
【0039】
ここで、ドア91は、インナパネル101とアウタパネル102とが接合されて構成される。
インナパネル101は、略平板矩形状のパネル本体111と、当該パネル本体111の上端に設けられた略コの字形状のフレーム部112と、を備えている。フレーム部112とパネル本体111の上辺とで囲まれた領域は、図示しない窓ガラスが露出する開口となっている。
アウタパネル102は、インナパネル101のパネル本体111の外側に取り付けられる。
アウタパネル102の上辺とインナパネル101のパネル本体111の上辺との間には、窓ガラスを収容するための隙間が形成されている。
【0040】
このような図4の初期状態で、制御装置12(図1)の制御による、第1アーム22R1の移動が開始する。この間、当該第1アーム22R1に取り付けられた第1把持治具23R1のセンサ57は、ドア91のうち、ドア開きピン56の挿入位置の検出を試みる。
ドア開きピン56の挿入位置は、特に限定されないが、本実施形態では、ドア91のアウタパネル102の上辺とインナパネル101のパネル本体111の上辺との隙間であるものとする。
センサ57が当該隙間を検出すると、第1把持治具23R1のドア開きピン56が当該隙間に挿入され、この状態で、第1アーム22R1によってドア91がボディの外側に向かって引かれる。すると、ドア91が開いて、ドア91の下辺が露出する。
【0041】
このようにして、図4に示すドア開き動作が終了すると、図5に示すボルト緩め動作が開始する。
【0042】
詳細については、図25乃至図32を参照して後述するが、制御装置12の制御の下、ドアH受け部材24のウレタンパッド42が上昇して、ドア91の下部に係止し、当該ドアを略垂直上向き方向に受け止めるように把持する。また、制御装置12の制御の下、第1アーム22R1が移動して、当該第1アーム22R1に取り付けられた第1把持治具23R1のドア把持パッド53,54が、ドア91のインナパネル101のパネル本体111に設けられた開口部の2点を把持する。
この間、制御装置12の制御の下、第2アーム22R2が移動して、当該第2アーム22R2に取り付けられた第2把持治具23R2のボルト緩めツール74が、ドア91とボディ92とを仮固定しているボルトを緩めて取り外す。
即ち、第1アーム22R1及びドアH受け部材24にてドア91が保持されている状態で、第2アーム22R2によりボルト緩めが行われる。
【0043】
このようにして、図5に示すボルト緩め動作が終了すると、図6に示すドア把持運搬動作が開始する。
【0044】
詳細については、図19乃至図24を参照して後述するが、制御装置12の制御の下、
第1アーム22R1に取り付けられた第1把持治具23R1のドア把持パッド53,54、及び、第2アーム22R2に取り付けられた第2把持治具23R2のドア把持パッド72の各々が、ドア91のインナパネル101のパネル本体111に設けられた開口部の3点(所定の形状の三角形の各頂点)の各々を把持する。
この状態で、第1アーム22R1及び第2アーム22R2が、協調して動作して、ドア91を運搬する。ドア91が、所定場所まで運搬されて払出されると、図6に示すドア把持運搬動作は終了する。即ち、ドア取り外しシステム1によるドア取り外し工程の全体が終了する。
【0045】
以上、図4乃至図6を参照して、ドア取り外しシステム1の動作の概略について説明した。さらに、以下、ドア取り外しシステム1の動作の詳細について説明する。
先ず、図7乃至図20を参照して、双腕ロボット11の移動動作について説明する。
【0046】
図7は、双腕ロボット11の第1アーム22R1の軌跡を説明する図であって、第1アーム22R1側から見た場合の双腕ロボット11の上半部の側面図である。
図8は、双腕ロボット11の第1アーム22R1の軌跡を説明する図であって、双腕ロボット11の上面図である。
【0047】
図7や図8に示すように、第1アーム22R1は、略垂直方向の2つの軸S1,S2の各々を中心として相互の軸と独立して回動可能である。このため、第1アーム22R1の点P1及び第2アーム22R2の点P2の可動範囲の軌跡は、略垂直方向については図7の一点鎖線に示されるようになり、略水平方向については、図8の一点鎖線に示されるようになる。
なお、図7には、説明の簡略上、第1アーム22R1のみが図示されているが、第1アーム22R1と独立して駆動可能な第2アーム22R2の点P2についても、略垂直方向の可動範囲の軌跡は、第1アーム22R1の点P1と略同一になる。
【0048】
図9は、ドア取り外し工程における双腕ロボット11の移動動作を説明するフローチャートである。
図10乃至図16の各々は、図9のフローチャートの各ステップの各々の動作時における、双腕ロボット11の位置及び状態をそれぞれ示す上面図である。
なお、図10乃至図16の各々においては、説明の簡略上、第1把持治具23R1及び第2把持治具23R2の図示は省略されている。
【0049】
ドア取り外し工程において、図4を用いて上述した初期状態になると、制御装置12の制御の下、双腕ロボット11の移動動作が開始する。
【0050】
ステップS21において、双腕ロボット11は、ドア開き位置まで移動する。
ここで、ドア開き位置とは、双腕ロボット11が、図10に示すように配置されて、図4を用いて上述したドア開き動作が開始可能になる位置をいう。
【0051】
ステップS22において、双腕ロボット11は、図4を用いて上述したドア開き動作を開始する。
すると、双腕ロボット11は、図11に示すように、軸S1を中心とした回動動作と、第1アーム22R1の移動動作とを組み合わせることによって、ドア91を円弧状に開ける。
【0052】
ステップS23において、双腕ロボット11は、ドア開き動作を終了する。
この段階では、双腕ロボット11は、図12に示す位置まで移動している。
ここで、本実施形態では、同一又は別の双腕ロボット11が、同様のドア開き動作を行って、図13に示すように、前後の2つのドア91が開けられるものとする。
この場合、双腕ロボット11は、前後の2つのドア91の間の狭小部に入り込まないと、ボルト緩め動作を開始することができない。
そこで、双腕ロボット11は、ボルト緩め動作を開始する前に、次のステップS24及びS25の移動動作をすることによって、前後の2つのドア91の間の狭小部に入り込む。
【0053】
即ち、ステップS24において、双腕ロボット11は、図13に示すように、ドア91の内側(インナパネル101側)に入り込む。
ステップS25において、双腕ロボット11は、図14に示すように、軸S1を中心とした回動動作と、軸S2を中心とした回動動作とを組み合わせることによって、ドア91の内側(インナパネル101側)にさらに入り込む。
【0054】
ステップS26において、双腕ロボット11は、図15に示すドア把持位置まで移動すると、軸S1を中心とした回動動作と、軸S2を中心とした回動動作とを停止する。
ここで、ドア把持位置とは、双腕ロボット11が、図15に示すように配置されて、図5を用いて上述したボルト緩め動作、及び、図6を用いて上述したドア把持運搬動作が開始可能になる位置をいう。
【0055】
ステップS27において、双腕ロボット11は、図5を用いて上述したボルト緩め動作を行う。
【0056】
ステップS28において、双腕ロボット11は、図6を用いて上述したドア把持運搬動作を開始する。
すると、双腕ロボット11は、軸S1を中心とした回動動作と、軸S2を中心とした回動動作とを組み合わせることによって、ステップS24及びS25の移動動作時とは逆の軌跡に沿って移動する。
【0057】
ステップS29において、双腕ロボット11は、図16に示す位置まで移動し、ドア91を図示せぬ搬送ハンガーに移載することで、ドア把持運搬動作を終了する。
これにより、ドア取り外し工程の全体も終了になる。
【0058】
図17は、上述の図9のフローチャートに従って双腕ロボット11が移動動作する場合における、S1軸,S2軸,及びドア91の位置関係を示す上面図である。
図17に示すように、ステップS21からS26の動作の段階では、S1軸の回動動作は反時計回りの動作となる。この間、S2軸の回動動作が独立して適宜行われる。
そして、S1軸の回動動作は、ステップS26からS28の動作の段階では一旦停止し、その後、ステップS28からS29の動作の段階では時計回りの動作となる。この間、S2軸の回動動作が独立して適宜行われる。
【0059】
ここで、ドア取り外し工程における、本実施形態の双腕ロボット11の動作と、従来のロボットの動作との差異について説明する。
【0060】
ドア取り外し工程における作業としては、閉まったドア91を開く作業と、開いたドア91からボルトを外す作業と、インナ側(インナパネル101側)からドア91を把持し運搬する作業と、が存在する。
このような作業の各々を自動化する場合、ロボット(本実施形態では双腕ロボット11)の動作としては、閉まったドア91を開く作業に対応するドア開き動作と、開いたドア91からボルトを外す作業に対応するボルト緩め動作と、内側(インナパネル101側)からドア91を把持し運搬する作業に対応するドア把持運搬動作と、の3種類に大別されることは上述した通りである。
【0061】
これらの3種類の動作、即ち、ドア開き動作、ボルト緩め動作、及び、ドア把持運搬動作の全てを同一のロボットに行わせるためには、図18に示す動作が必要になる。
図18は、ドア取り外し工程におけるロボットの軌跡の概略を示す上面図である。
【0062】
ステップST1において、ロボットは、図18の実線の矢印で示す軌跡で、閉まったドア91のスキン側(アウタパネル102側)に移動する。
ステップST2において、ロボットは、図18の点線の矢印で示す軌跡で、ドア91を開く動作をする。このようなステップST2の動作が、ドア開き動作に相当する。
【0063】
次に、ステップST3において、ロボットは、図18の一点鎖線の矢印で示す軌跡で、開いたドア91のインナ側(インナパネル101側)に入り込むように移動する。
【0064】
そして、ロボットは、ボルト緩め動作を行い、その後、ドア把持運搬動作を開始する。
すると、ステップST4において、ロボットは、図18の二点鎖線の矢印で示す軌跡で、ドア91を把持したまま移動して、当該ドア91を図示せぬドアバンガーに移載する。
【0065】
従来においては、自動車のボディ92の運搬方向(以下、図18の記載にあわせて「T方向」と呼ぶ)と、水平面においてT方向に垂直な方向(以下、図18の記載にあわせて「B方向」と呼ぶ)とのそれぞれに、ロボットを移動させるシフトベースが取り付けられていた。このようなシフトベース自体は大きなものとなっていた。
この場合、ロボットの移動のうち、ステップST2における移動(点線の矢印で示す軌跡の移動)と、ステップST3における移動(一点鎖線の矢印で示す軌跡の移動)は、円弧状のような移動となるため、サイクルタイムがかかるという問題があった。
【0066】
これに対して、本実施形態の双腕ロボット11においては、第1アーム22R1及び第2アーム22R2が、これらにとって外部軸であるS1軸及びS2軸の各々によって回動される。
これにより、S1軸を用いた回動により、ドア開き動作(図18のステップST2、図9のステップS22及びS23)が実現される。
そして、S1軸とS2軸とを用いた回動により、ボルト緩め動作を行うための、ドア91のインナ側(インナパネル101側)に入り込む移動(図18のステップST3、図9のステップS24及びS25)が実現される。この場合の移動は、図12乃至図15を用いて上述したように、ドア91の方向を向くような移動である。
その結果、ドア把持位置まで移動したとき(図9のステップS26)、双腕ロボット11は、ボルト緩め動作を行い易い姿勢となっているため、サイクルタイムの短縮を図ることが可能になる。
【0067】
以上説明したように、本実施形態のドア取り外しシステム1には、自動車のボディのドアの開け方として、次のような手法が適用されている。
即ち、本実施形態のドア取り外しシステム1の双腕ロボット11は、
ドアを開けるためのツールとしての第1把持治具23R1が接続された第1アーム22R1と、
ドアを開けるための別のツールとしての第2把持治具23R2が接続された第2アーム22R2と、
これらの第1アーム22R1及び第2アーム22R2が取り付けられる台座としてのロボット本体21と、
を備えている。
ロボット本体21には、地面に略垂直な方向の回転軸S1と、当該回転軸S1に対して地面方向にオフセットして位置する回転軸S2と、が設けられている。
この場合、双腕ロボット11は、
第1アーム22R1及び第2アーム22R2を用いてドアを外側から把持し、
回転軸S1を回転させてドアを開き、
回転軸S1をさらに回転させて、開いたドアの内側にロボット本体21を移動させると共に、ドアの作業箇所(把持したりボルトを緩める作業をする箇所)に対して、第1アーム22R1及び第2アーム22R2が正面を向くように、回転軸S2を回転させる。
【0068】
これにより、本実施形態では、次の(1)及び(2)の効果を奏することが可能になる。
(1)2つの回転軸S1,S2を設けるのみでロボットの移動が可能になる。よって、ドア取り外しシステム1の設置箇所が小さくて済む。
(2)ドアの開きが完了したときには、双腕ロボット11は、ドアに対する作業がし易い姿勢となっている。よって、サイクルタイムが短縮される。
【0069】
以上、図7乃至図18を参照して、ドア取り外しシステム1の動作の詳細の1つとして、双腕ロボット11の移動動作について説明した。
次に、ドア取り外しシステム1の動作の詳細の別の1つとして、ドア把持運搬動作(図6参照)におけるドアの3点把持の手法について、図19乃至図24を参照して説明する。
【0070】
図19は、ドア取り外しシステム1のドア把持運搬動作におけるドアの3点把持の手法を説明する図であって、内側からみたドアの概略外観構成の斜視図である。
図19に示すように、制御装置12の制御の下、第1把持治具23R1のドア把持パッド53,54、及び、第2把持治具23R2のドア把持パッド72の各々が、ドア91のインナパネル101のパネル本体111に設けられた開口部120の3点PA,PB,PCの各々を把持する。
【0071】
図20は、ドア取り外しシステム1のドア把持運搬動作におけるドアの3点把持位置の力関係を示す図であって、内側からみたドアの概略外観構成の斜視図である。
図21は、ドア取り外しシステム1のドア把持運搬動作におけるドアの3点把持位置の力関係を示す図であって、前方側からみたドアの概略構成の断面図である。
図20や図21に示すように、開口部120の点PA及び点PCの2点の各々で把持するドア把持パッド53,72の各々により、ドア91の重量が支えられる。即ち、点PGの位置がドア91の重心位置であり、点PA及び点PCの各々にはドア91の重量の約半分の力がそれぞれかかることになる。
そして、開口部120の点PBで把持するドア把持パッド54により、ドア91のブレが抑えられる。
【0072】
具体的には、ドア把持パッド53は、開口部120の上側の端部である点PAに当接して、重力方向の力を支えるようにドア91を把持する。
ここで、図19に示すように、重力方向を「Z方向」と呼び、図18のT方向(自動車のボディ92の運搬方向)と平行な方向を「X方向」と呼び、図18のB方向と水平な方向を「Y方向」と呼ぶ。
この場合、点PAは、Y方向の開口部120の端部に設定されるため、ドア91の運搬時の慣性力を受ける。よって、点PAは、Z方向についてはなるべく上の位置に設定されるとよい。
【0073】
ドア把持パッド54は、開口部120のY方向の端部となる点PBに当接して、Y方向の力を受けるようにドア91を把持する。
この場合、点PBは、荷重受けとなり、点PAで把持するドア把持パッド53により発生するモーメントを受ける位置に設定される。また、点PBは、Z方向についてはなるべく下の位置に設定されるとよい。
【0074】
ドア把持パッド72は、開口部120の上側の端部である点PCに当接して、重力方向の力を支えるようにドア91を把持する。
この場合、点PCは、−Y方向の開口部120の端部に設定されるため、ドア91の運搬時の慣性力を受ける。よって、点PCは、Z方向についてはなるべく上の位置に設定されるとよい。
また、点PCは、重心(点PG)を点PAと挟むように設定される。即ち、点PCによる荷重受けの位置は、点PAと重心を挟む位置になる。
【0075】
換言すると、ドア把持パッド53,54は第1アーム22R1により、ドア把持パッド72は第2アーム22R2により、それぞれ任意の位置に自在に配置させることが可能である。
よって、所定の車種のドア91の把持についてのみ言及したが、インナパネル側に開口部を有するドアであればその車種によらず、点PA,点PB,点PCを上述のように設定することで、本実施形態のドアの3点把持の手法(図19乃至図21参照)を同様に適用することができる。
ただし、この場合、図2の機種切替シフト55が、自動車の車種に応じて、フレーム52の長手方向にスライドすることによって、ドア把持パッド54の位置をフレーム52の長手方向に沿って移動させる。即ち、機種切替シフト55は、フレーム52の長手方向におけるドア把持パッド53,54の離間距離を、距離LAから距離LBの範囲内で自動車の車種に応じて変更する。
【0076】
図22は、ドア取り外しシステム1のドア把持運搬動作におけるドアの3点把持位置の力関係を示す図であって、図20とは別の車種のドアを内側からみた場合の概略外観構成の斜視図である。
図23は、ドア取り外しシステム1のドア把持運搬動作におけるドアの3点把持位置の力関係を示す図であって、図22の車種のドアを前方側からみた場合の概略構成の断面図である。
【0077】
ここで、図22及び図23に示すドア131は、ドア91とは異なる車種のドアであって、インナパネル141とアウタパネル142とが接合されて構成される。
インナパネル141は、略平板矩形状のパネル本体151と、当該パネル本体151の上端に設けられた略コの字形状のフレーム部152と、を備えている。フレーム部152とパネル本体151の上辺とで囲まれた領域は、図示しない窓ガラスが露出する開口となっている。
インナパネル141には、2つの開口部161,162が設けられている。
アウタパネル142は、インナパネル141のパネル本体151の外側に取り付けられる。
アウタパネル142の上辺とインナパネル141のパネル本体151の上辺との間には、窓ガラスを収容するための隙間が形成されている。
【0078】
開口部161の点PAで把持するドア把持パッド53と、開口部162の点PCで把持するドア把持パッド72との各々により、ドア131の重量が支えられる。即ち、点PGの位置がドア131の重心位置であり、点PA及び点PCの各々にはドア131の重量の約半分の力がそれぞれかかることになる。
そして、開口部161の点PBで把持するドア把持パッド54により、ドア131のブレが抑えられる。
【0079】
具体的には、ドア把持パッド53は、開口部161の上側の端部である点PAに当接して、重力方向の力を支えるようにドア131を把持する。
ドア把持パッド54は、開口部161のY方向の下側の端部となる点PBに当接して、Y方向の力を受けるようにドア131を把持する。
ドア把持パッド72は、開口部162の上側の端部である点PCに当接して、重力方向の力を支えるようにドア131を把持する。
【0080】
ここで、ドア取り外し工程のドア把持運搬動作におけるドアの3点把持の手法について、本実施形態の手法と、従来の手法との差異について説明する。
【0081】
従来の手法によれば、所定のピッチでドア(ワーク)に配置された3点のPIN孔にPINを挿すことで、ドアを安定させて、ピンクランプやクランプ等でドアの重量を把持している。従来手法では、凹凸を有する山切りチャックを用いることで、PIN孔の奥行きの機種差を解消するようにしている。
【0082】
このような従来の手法では、次のような第1乃至第3の問題点が生じていた。
第1の問題点とは、3点のPIN孔にPINを勘合させるために、3点の穴位置を正確に把握しないといけないという問題点、換言すると、センシングや把持前のドア位置を位置決めしていないとならないという問題点である。
第2の問題点とは、ドア取り外し工程では塗装後のドアが対象となるところ、このような塗装後のドアに対して、PINを挿す際やクランプする際にデフォームをつけなければならないという問題点である。
第3の問題点とは、ピンクランプやチャック等の重量が大きなクランプ機器が必要になるという問題点である。
【0083】
これに対して、図19乃至図21を用いて上述した本実施形態の3点把持の手法を適用することで、これらの従来の第1乃至第3の問題点を解消することができる。
即ち、ドア91には、内部部品取り付けのため等の理由により開口部120が設けられている。この開口部120の3点PA,PB,PCの各々が、ドア把持パッド53,54,72の各々により、ワークたるドア91(図20等)やドア131(図22等)を安定して保持できる。これにより、従来必要であった3点のPIN孔は不要になり、第1の問題や第2の問題が解消する。
また、ドア把持パッド53,54は、第1アーム22R1のエンドエフェクタたる第1把持治具23R1に設けられており、ドア把持パッド72は、第2アーム22R2のエンドエフェクタたる第2把持治具23R2に設けられている。これにより、ドア把持パッド53,54,72の配置によりドア91(図20等)やドア131(図22等)の把持が可能になる。即ち、機種毎に開口部の仕様差はあるが(図20の1つの開口部120と、図22の2つの開口部161,162との差異参照)、第1アーム22R1及び第2アーム22R2といった双椀で、ドア把持パッド53,54,72により重心位置を囲むように各機種のドアをバランス良く把持することができる。従って、従来必要であったピンクランプやチャック等の重量が大きなクランプ機器が不要になり、ドア91への負荷が少なくなる。即ち、第3の問題点が解決する。
【0084】
ここで、ドア把持パッド53,54,72は、図24に示す形状を有している。
図24は、ドア把持パッドの概略外観構成を示す側面図である。
なお、図24においては、ドア把持パッド53の形状のみが図示されているが、ドア把持パッド54,72の形状も図24に示すようになる。
ドア把持パッド53,54,72は、把持部171と、フローティング機構172と、を有している。
把持部171は、MCナイロン(登録商標)製であり、邦楽の和楽器の「つづみ」の円筒形状、即ち、2つの円錐台の上面(小円状の面)同士を接合した形状を有している。この接合部において凹部が形成されており、当該凹部において、ドア91のパネル本体111(開口部120)が係止される。なお、図24には、パネル本体111のみが図示されているが、当然ながら各機種のパネル本体(例えば、図22等に示す2つの開口部161,162を有するパネル本体151)も、当該凹部において係止され得る。このように、把持部171は、円筒形状を有することにより、開口部120の形状に対応できるようになっている。
フローティング機構172は、把持部171の2つの円錐台の下面を貫通する軸において、当該2つの円錐台の下面の各々に接するように設けられる弾性体を有することによって、ワーク(ドア91やドア131等)のバラつきに対応できるようにしている。
【0085】
以上、図19乃至図24を参照して、ドア把持運搬動作(図6参照)におけるドアの3点把持の手法について説明した。
次に、ドア取り外し工程における双腕ロボット11の動作のうち、ボルト緩め動作(図5参照)及びドア把持運搬動作(図6参照)の詳細について、図25乃至図27を参照して説明する。
【0086】
ボルト緩め動作では、図6に示すように、第2把持治具23R2に設けられたボルト緩めツール74が用いられるため、第2把持治具23R2に設けられたドア把持パッド72を用いることができなくなる。即ち、図19乃至図24を参照して上述したドアの3点把持の手法を適用することができない。
そこで、本実施形態では、ボルト緩め動作においては、図25に示すようなドアの把持の手法が適用される。
【0087】
図25は、ボルト緩め動作におけるドアの把持の手法を説明する図であって、内側からみた場合のドアの概略外観構成を示す側面図である。
図25に示すように、ボルト緩め動作では、第1把持治具23R1のドア把持パッド53,54の各々が、ドア91の開口部120の点PA,PBの各々で把持すると共に、点PCで把持する第2把持治具23R2のドア把持パッド72の代わりに、ドアH受け部材24のウレタンパッド42でドア91の下部を把持する。
【0088】
このように、本実施形態のドア取り外しシステム1の双腕ロボット11は、
ドア(ドア91等)の重力方向の力を受ける荷重受けとしてのドアH受け部材24(ウレタンパッド42)と、
ドアを把持する把持ツールとしての第1把持治具23R1と、
を備えており、
第1把持治具23R1は、
機種切替シフト55(図2)による2点(点PA,PB)の相対距離が可変である、ドアのインナパネルの開口部(ドア91の開口部120等)に当接する2つのドア把持パッド53,54を有している。
2つのドア把持パッド53,54のうち、一方のパッド(本実施形態ではドア把持パッド53)は、ドアの荷重方向の力を受ける方向に開口部に当接し、他方のパッド(本実施形態ではドア把持パッド54)は、荷重受け(H受け部材24)と前記一方のパッドとにより発生するモーメントを受ける方向に開口部に当接する。
【0089】
これにより、本実施形態では、上述の(1)及び(2)の効果に加えてさらに、次の(3)乃至(5)の効果を奏することが可能になる。
(3)荷重受け(H受け部材24)と1つの把持ツール(第1把持治具23R1)とにより、ドアを把持することができるため、ドアをボディから取り外す際に必要なロボットの腕が1本(本実施形態では第1アーム22R1のみ)で済む。よって、ドア取り外し工程で、少なくとも1つのドアに対しては、双腕ロボット11単体を設置すれば済む。
(4)ドアの開口部にパッド(ドア把持パッド53,54)を当接させるのみでよいので、把持のための動力を必要とせず、把持ツール(第1把持治具23R1)の小型化を図ることが可能になる。
(5)ドアのインナパネルの開口部を把持に使用するため、ドアに傷がつかない。
【0090】
さらに以下、ドア取り外し工程における双腕ロボット11の動作のうち、このような図25を参照して上述したドアの把持の手法が適用されたボルト緩め動作(図5参照)、及び、図19乃至図24を参照して上述したドアの3点把持の手法が適用されたドア把持運搬動作(図6参照)の詳細について、図26及び図27を参照して説明する。
【0091】
図26及び図27は、ドア取り外し工程における双腕ロボット11の動作のうち、ボルト緩め動作及びドア把持運搬動作の詳細を説明するフローチャートである。
上述したように、図4に示すドア開き動作が終了すると、ボルト緩め動作及びドア把持運搬動作が開始する。より正確には、双腕ロボット11が軸S1,軸S2の回動動作によりドアの内側に入り込みドア把持位置まで移動する(図9のステップS21乃至S26参照)と、ボルト緩め動作が開始し、その後、当該ボルト緩め動作が正常に終了すれば、ドア把持運搬動作が開始される。
なお、第1アーム22R1、第2アーム22R2、及びドアH受け部材24の各々は、制御装置12(図1)の制御により駆動されるが、図26及び図27については、動作主体であるとして説明する。
また、ワークは図19等のドア91であるとして、以下の説明を行うが、図22のドア131等別機種のドアがワークとなった場合も、以下に説明する動作が実行される。
【0092】
図26のステップS41において、第1アーム22R1は、ドア把持位置に移動OKか否かを判定する。
予めドア把持位置として決定されている位置に双腕ロボット11が移動していない場合、ステップS41においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、予めドア把持位置として決定されている位置に双腕ロボット11が移動している場合、ステップS41においてYESであると判定され、処理はステップS42に進む。
【0093】
ステップS42において、ドアH受け部材24は、昇降シリンダ41により、ウレタンパッド42を上昇させる。
【0094】
ステップS43において、ドアH受け部材24は、計測シリンダ43によりH受け上端を検出したか否かを判定する。
ここで、H受け上端として、ウレタンパッド42がドア91の下部に接触して荷重がかかる位置が設定されているものとする。
ウレタンパッド42の上昇が停止してもH受け上端が検出されない場合、ステップS43においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、H受け上端が検出された場合、ステップS41においてYESであると判定され、処理はステップS44に進む。
【0095】
ステップS44において、ドアH受け部材24は、ウレタンパッド42の昇降の移動をロックする。
ステップS45において、ドアH受け部材24は、ロック検出OKか否かを判定する。
ここで、ドアH受け部材24は、図示はしないが、ウレタンパッド42の昇降の移動のロック及びアンロックを検出する機構(以下、「ロック検出機構」と呼ぶ)を有しているものとする。
ロック検出機構によりロックが検出されなかった場合、ステップS45においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、ロック検出機構によりロックが検出された場合、ステップS45においてYESであると判定され、処理はステップS46に進む。
なお、ドア開き動作では、図4を参照して上述したように、第1把持治具23R1のドア開きピン56がアウタパネル102の上辺とインナパネル101のパネル本体111の上辺との間の隙間に挿入される。従って、ステップS45においてYESであると判定される時点でも未だドア開きピン56が当該隙間に挿入されたままであった場合、ドア開きピン56が当該隙間から抜かれた後に、処理はステップS46に進む。
【0096】
ステップS46において、第1アーム22R1は、把持位置まで移動する。ここで、把持位置とは、エンドエフェクタたる第1把持治具23R1のドア把持パッド53,54が、ドア91の開口部120の点PA,PBの付近に配置される位置をいう。
ステップS47において、第1アーム22R1は、エンドエフェクタたる第1把持治具23R1のドア把持パッド53,54を用いて、ドア91を把持する。
【0097】
ステップS48において、第1アーム22R1は、把持OKか否かを判定する。
ここで、「把持OK」とは、第1把持治具23R1のドア把持パッド53,54の各々が、ドア91の開口部120の点PA,PBの各々で把持している状態をいう。
換言すると、上述した図25に示す状態、即ち、第1アーム22R1のエンドエフェクタたる第1把持治具23R1(より正確にはドア把持パッド53,54)、及びドアH受け部材24のウレタンパッド42によって、ドア91が保持されている状態が、把持OKである。
把持OKの場合にはドア91がしっかりと固定されるので、第2アーム22R2は、ボルトの緩め動作を適切に行うことができるようになる。
【0098】
換言すると、把持OKでない場合、第2アーム22R2はボルトの緩め動作を適切に行うことができないので、ステップS48においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、把持OKの場合、ステップS48においてYESであると判定され、処理はステップS49に進む。
【0099】
ここで、本例では、ドア91とボディ92とを仮固定しているボルトは2本存在し、緩める順番が予め決定されているものとする。そこで、以下、これらの2本のボルトを明確に区別すべく、1番目に緩められるボルトを「1本目ボルト」と呼び、2番目に緩められるボルトを「2本目ボルト」と呼ぶ。
【0100】
ステップS49において、第2アーム22R2は、1本目ボルト緩め位置まで移動する。ここで、1本目緩め位置とは、エンドエフェクタたる第2把持治具23R2のボルト緩めツール74が、ドア91に仮固定されている1本目ボルトの付近に配置される位置をいう。
ステップS50において、第2アーム22R2は、エンドエフェクタたる第2把持治具23R2のボルト緩めツール74を用いて、1本目ボルトを緩める。
なお、ボルト緩めツール74によるボルト緩め動作の詳細については、図28乃至図32を参照して後述する。
【0101】
ステップS51において、第2アーム22R2は、1本目ボルトの緩めがOKか否かを判定する。
ここでは、1本目ボルトが緩められて取り外された場合、1本目ボルトの緩めがOKと判定され、それ以外の場合NOと判定される。
即ち、何らかの原因で、1本目ボルトが取り外されなかった場合、ステップS51においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、1本目ボルトの緩めがOKの場合、ステップS51においてYESであると判定され、処理はステップS52に進む。
【0102】
ステップS52において、第2アーム22R2は、2本目ボルト緩め位置まで移動する。ここで、2本目緩め位置とは、エンドエフェクタたる第2把持治具23R2のボルト緩めツール74が、ドア91に仮固定されている2本目ボルトの付近に配置される位置をいう。
ステップS53において、第2アーム22R2は、エンドエフェクタたる第2把持治具23R2のボルト緩めツール74を用いて、2本目ボルトを緩める。
なお、ボルト緩めツール74によるボルト緩め動作の詳細については、図28乃至図32を参照して後述する。
【0103】
ステップS54において、第2アーム22R2は、2本目ボルトの緩めがOKか否かを判定する。
ここでは、2本目ボルトが緩められて取り外された場合、2本目ボルトの緩めがOKと判定され、それ以外の場合NOと判定される。
即ち、何らかの原因で、2本目ボルトが取り外されなかった場合、ステップS54においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、2本目ボルトの緩めがOKの場合、ステップS54においてYESであると判定され、処理はステップS55に進む。
【0104】
ステップS55において、第2アーム22R2は、図3(B)の把持位置状態から図3(A)の緩め位置状態に遷移させた後、把持位置に移動する。ここで、把持位置とは、エンドエフェクタたる第2把持治具23R2のドア把持パッド72が、ドア91の開口部120の点PCの付近に配置される位置をいう。
ステップS56において、第2アーム22R2は、エンドエフェクタたる第2把持治具23R2のドア把持パッド72を用いて、ドア91の開口部120の点PCを把持する。
【0105】
ステップS57において、第2アーム22R2は、把持OKか否かを判定する。
ここで、第2アーム22R2にとっての「把持OK」とは、図19に示すように、第2把持治具23R2のドア把持パッド72が、ドア91の開口部120の点PCで把持している状態をいう。
即ち、この段階では、第1アーム22R1にとっての「把持OK」、即ち、第1把持治具23R1のドア把持パッド53,54の各々が、ドア91の開口部120の点PA,PBの各々で把持している状態は成立している。従って、第2アーム22R2にとっての「把持OK」が成立すれば、図19に示すような3点把持が成立していることになり、このままドア把持運搬動作を開始することが可能になる。
【0106】
換言すると、第2アーム22R2にとっての「把持OK」が成立していない場合、ドア把持運搬動作を開始することができないので、ステップS57においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、第2アーム22R2にとっての「把持OK」が成立している場合、ステップS57においてYESであると判定され、処理はステップS58に進む。
【0107】
ステップS58において、双腕ロボット11は、ドア把持運搬動作を開始させる。
【0108】
ステップS59において、ドアH受け部材24は、ウレタンパッド42の昇降の移動をアンロックする。
ステップS60において、ドアH受け部材24は、アンロック検出OKか否かを判定する。
上述の図示せぬアンロック検出機構によりアンロックが検出されなかった場合、ステップS60においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、ロック検出機構によりアンロックが検出された場合、ステップS60においてYESであると判定され、処理はステップS61に進む。
【0109】
ステップS61において、ドアH受け部材24は、昇降シリンダ41により、ウレタンパッド42を下降させる。
【0110】
ステップS62において、ドアH受け部材24は、計測シリンダ43によりH受け戻り端を検出したか否かを判定する。
ここで、H受け戻り端として、H受け上端に対して下方に所定距離だけ離間した位置が設定されているものとする。
ウレタンパッド42の下降が停止してもH受け戻り端が検出されない場合、ステップS62においてNOであると判定され、処理は図27のステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、H受け戻り端が検出された場合、ステップS62においてYESであると判定され、処理は図27のステップS67に進む。
【0111】
ステップS67において、双腕ロボット11は、ドア91を把持したまま搬送ハンガーまで移動し、ドア91を搬送ハンガーに移載する。
ステップS68において、双腕ロボット11は、ドア91をクランプする。
ステップS69において、双腕ロボット11は、ドア91のクランプがOKか否かを判定する。
ドア91のクランプが失敗した場合、ステップS69においてNOであると判定されて、処理はステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、ドア91のクランプが成功した場合、ステップS69においてYESであると判定されて、処理はステップS70に進む。
【0112】
ステップS70において、双腕ロボット11は、ボルト排出位置まで移動する。ここで、ボルト排出位置とは、第2アーム22R2のエンドエフェクタたる第2把持治具23R2のボルト排出機構76により、1番目ボルト及び2番目ボルトの排出が可能になる位置をいう。
ステップS71において、双腕ロボット11は、ボルト排出機構76を用いて、1番目ボルト及び2番目ボルトを排出する。
ステップS72において、双腕ロボット11は、ボルト排出がOKか否かを判定する。
ボルトの排出が失敗した場合、ステップS72においてNOであると判定されて、処理はステップS63に進み、所定のエラー処理が実行される。なお、ステップS63以降の処理については後述する。
これに対して、ボルトの排出が成功した場合、ステップS72においてYESであると判定されて、処理はステップS73に進む。
【0113】
ステップS73において、双腕ロボット11は、初期状態の位置(図4参照)まで移動する。
これにより、ボルト緩め動作及びドア把持運搬動作は終了となる。
【0114】
なお、上述の如く、双腕ロボット11の主要な動作が失敗すると、処理はステップS63に進み、所定のエラー処理として次のような処理が実行される。
【0115】
ステップS63において、双腕ロボット11は、アラームを発し、自己の動作を停止させる。
従って、以下のステップS64乃至S66は、操作者による作業又は、操作者の手動操作による双腕ロボット11の動作となる点に注意する。
ステップS64において、操作者が、ドアを搬送する。
ステップS65において、操作者が、双腕ロボット11を初期状態の位置(図4参照)まで手動移動させる。
ステップS66において、操作者が、双腕ロボット11を再始動させるか、又は再始動できない場合等には双腕ロボット11をドア取り外し工程から除外する(修理等する)。
これにより、ボルト緩め動作及びドア把持運搬動作は終了となる。
【0116】
ここで、ドア取り外し工程のボルト緩め動作及びドア把持運搬動作の実現手法について、本実施形態の手法と、従来の手法との差異について説明する。
【0117】
従来の手法によれば、ドア取り外し工程に設置されるドア取り外しシステムは、双腕ロボットに加えて単腕ロボットを備えていた。このため、従来のドア取り外しシステムがドアを取り外す場合には、双腕ロボットの一対のアーム(マニュピュレータ)が上下からドアを把持し、単腕ロボットが、ドアをボディに仮固定しているボルトを緩めていた。
【0118】
このような従来の手法では、次のような第1及び第2の問題点が生じていた。
第1の問題点とは、ドアを把持するロボットと、ボルトを緩めるロボットとを別々に配置しなければならないという問題点である。
第2の問題点とは、ドアを上下から把持するためには、過般重量の重いロボットを採用する必要があり、その結果、ドア取り外しシステム全体が肥大化するという問題点である。
【0119】
これに対して、図25乃至図27を用いて上述した本実施形態の手法を適用することで、これらの従来の第1及び第2の問題点を解消することができる。
即ち、ドア取り外し工程のボルト緩め動作及びドア把持運搬動作を実現するためには、ドア91の荷重受け、ドア91の奥横方向のロック、ボルトの緩め、緩め後のドアの把持が必要になる。
そこで、本実施形態の双腕ロボット11では、一対のマニュピュレータとしての第1アーム22R1及び第2アーム22R2と、ドア(ドア91等)の荷重受けの装置として機能するドアH受け部材24と、が設けられている。
片腕たる第1アーム22R1とドアH受け部材24とでドアを支えながら、もう片方の第2アーム22R2がボルトを緩めて外し、その後、ボルトを外した第2アーム22R2が、ドア91を予め支えていた第1アーム22R1と協働してドアを把持して運搬する。
このように、従来の手法では2台のロボットが必要であったところ、本実施形態の手法を適用することで、1台の双腕ロボット11で済み、第1の問題が解決し、ひいては、設備のレイアウト性が向上する。
また、従来の手法ではドアは上下から把持されていたのに対して、本実施形態の手法では、第1アーム22R1又は第2アーム22R2に取り付けられた把持ツール(ドア把持パッド53,54,72)がドアの開口部に差し込まれることによって、当該ドアが把持される。これにより、ドアの重量を分散させることが可能になる。このようにして、本実施形態の手法では、レイアウト的に小さな双腕ロボット11を採用することができるので、第2の問題を解決することが可能になる。
さらに、本実施形態の手法では、ドアの外板面を把持することがないので、ドアの外傷を軽減できる。
【0120】
以上説明したように、本実施形態の双腕ロボット11は、自動車のボディにボルトで固定されたドア(ドア91等)を、当該ボディから取り外すドア取り外し装置として機能する。
このような機能を有する双腕ロボット11は、
ドアを把持する把持治具(本実施形態では第1把持治具23R1)を有する第1アーム22R1と、
ドアを固定しているボルトを外すボルト外し機構と、ドアを把持する把持治具を有する(本実施形態では、ドア把持パッド72とボルト緩めツール74とを共に含む第2把持治具23R2を有する)第2アーム22R2と、
ドアの重力方向の荷重を受ける荷重受けとしてのドアH受け部材24と、
を備える。
【0121】
より具体的には、双腕ロボット11は、
ドアのインナパネルの開口部に挿入して、ドアを把持する把持治具(本実施形態では第1把持治具23R1)を有する第1アーム22R1と、
ドアを固定しているボルトを外すボルト外し機構と、ドアのインナパネルの開口部に挿入して、ドアを把持する把持治具を有する(本実施形態では、ドア把持パッド72とボルト緩めツール74とを共に含む第2把持治具23R2を有する)第2アーム22R2と、
第1アーム22R1及び第2アーム22R2の架台としてのロボット本体21に設けられる、ドアの重力方向の荷重を受ける荷重受けとしてのドアH受け部材24と、
を備える。
【0122】
このような構成の双腕ロボット11は、
ボルト緩め動作では、
ドアの荷重を受ける荷重受け(ドアH受け部材24)をドアの下部にセットし、
双腕ロボット11の片腕(本実施形態では第1アーム22R1)で、ドアの重力方向とドアの横方向へのモーメントを受け、もう一方の腕(本実施形態では第2アーム22R2)で、ドアを固定しているボルトを外し、
ドア把持運搬動作では、
双腕ロボット11の片腕(本実施形態では第1アーム22R1)で、ドアの重力方向とドアの横方向へのモーメントを受けると共に、もう一方の腕(本実施形態では第2アーム22R2)でもドアを把持する。
【0123】
これにより、本実施形態では、上述の(1)乃至(5)の効果に加えてさらに、次の(6)乃至(8)の効果を奏することが可能になる。
(6)ドア取り外し工程において、少なくとも1つのドアに対しては、1台の双腕ロボット11のみを設置すれば足りる。これにより、ドア取り外し工程で設置されるロボットの台数が削減でき、設備のレイアウト性が向上する。
(7)開口部に把持ツールを挿入することで、ロボットにかかるドアの重量を分散させることができるので、双腕ロボット11をより小さな構成で実現できる。
(8)ドアの外板面を把持することがないので、当該ドアの外傷を軽減できる。
【0124】
以上、図25乃至図27を参照して、ドア取り外し工程における双腕ロボット11の動作のうち、ボルト緩め動作(図5参照)及びドア把持運搬動作(図6参照)の詳細について説明した。
次に、当該ボルト緩め動作に用いられるボルト緩めツール74の詳細について、図28乃至図32を参照して説明する。
【0125】
図28は、ボルトを緩める前のボルト緩めツール74の縦断面図である。
ボルト緩めツール74は、双腕ロボット11の第2把持治具23R2におけるフレーム73の長手方向の他端に取り付けられており(図3参照)、図28に図示せぬ自動車のボディにドアを仮固定しているボルト250を緩めて取り外すことができる。
【0126】
ボルト緩めツール74は、筒201と、ギア202と、摺動ソケット203と、流体機構204と、軸受205と、マグネット206と、を備える。
なお、ボルト250は、ねじ胴部251と、ねじ胴部251の先端に設けられたねじ頭部252と、ねじ頭部252とねじ胴部251との間に設けられたフランジ部253と、を備える。
【0127】
図29は、筒201及びギア202の外観構成を示す斜視図である。
筒201は、六角形の断面形状の摺動孔を有する短円筒状に形成される。筒201は、摺動孔に沿って摺動ソケット203(図28)を軸力方向に摺動可能に配置することで、摺動ソケット203を軸方向に沿って案内する。
ギア202は、筒201の軸方向の略中央近辺において筒201の外側面と係合し、図1の制御装置12の制御によって、図示せぬ駆動源から供給される駆動力により、筒201を周方向に回転させる。
【0128】
図28に戻り、摺動ソケット203は、側縁部211と、係合部212と、孔部213と、を備える。
側縁部211は、略円筒形状に形成される。
側縁部211の前進端側(図28、図31、図32の左側)の内方は、ボルト250のねじ頭部252を嵌合可能な寸法に形成され、側縁部211とボルト250とは、軸方向には摺動可能に、かつ、周方向には互いに同期して回転可能に係合される。側縁部211の後退端側(図28、図31、図32の右側)の内方は、後述の流体機構204の基部221を摺動可能な寸法に形成される。
また、側縁部211の前進端側の内径寸法は、ボルト250のフランジ部253の径寸法よりも小さく形成され、また、側縁部211の前進端側の外径寸法は、ボルト250のフランジ部253の径寸法よりも大きく形成される。これにより、ボルト250のうちねじ頭部252のみが摺動ソケット203に収納されることになり、ボルト250は、フランジ部253が設けられている場合であっても引っかかることなく、摺動ソケット203と共に筒201の内側を軸方向に自由に摺動することが可能になる。
係合部212は、中心に孔部213が形成された平板状に形成され、側縁部211の内方において側縁部211の軸方向の間に配置される。
【0129】
図30は、筒201及び摺動ソケット203の構成を示す横断面図である。
図30A、図30Bに示すように、筒201の内径寸法d1は、摺動ソケット203の側縁部211の外形寸法d2と略同一の寸法に形成され、摺動ソケット203は、筒201の内方において軸方向に沿って摺動可能に配置される。
【0130】
図28に戻って、流体機構204は、基部221と、流体通路222と、を備える。
基部221は、短円柱状に形成され、側縁部211の内部の後退端側において、側縁部211の軸方向に沿って摺動可能に配置される。
流体通路222は、長筒状に形成され、エアーを挿通し得る流路を内部に備える。即ち、流体通路222は、図1の制御装置12の制御によって、内部の流路を通じて前進端側にエアーを排出する。
流体通路222の流路は、長手方向の一端部で基部221に貫通し、長手方向の他端部で、エアーが貯留された図示せぬ流体貯留源に接続されている。このような流路を有する流体通路222は、長手方向の所定位置に配置された軸受205により固定される。
即ち、流体機構204の流路は、図示せぬ流体貯留源に貯留されているエアーを、流体通路222を通じて、長さ方向の一端部に配置されている基部221から排出する。すると、排出されたエアーは、その勢いにより、ボルト250を摺動ソケット203ごと押圧して前進端側に押し出す。
また、摺動ソケット203は、図1の制御装置12の制御によって、流体通路222からのエアーの排出を停止し、一端部から他端部に対しエアーを逆流させる。これにより、後退端側から前進端側へのエアーによる押圧は解除される。この状態で、ボルト緩めツール74が、図1の制御装置12の制御によって、ボルト250を回して緩める。すると、ボルト250は軸力により浮き上がって後退端側へ移動し、摺動ソケット203は移動されたボルト250ごと前進端側から後退端側へ筒201内を摺動して移動する。
なお、流体通路222の流路からエアーを排出しているが、流路から排出されるものは、これに限られるものではなく、気体や液体等、当該流路から排出し得る性状を有する流体であればよい。
流体機構204による摺動ソケット203及びボルト250の動作の詳細については、図31及び図32を参照して後述する。
【0131】
マグネット206は、基部221の前進端側の端部に設けられる。マグネット206は、図31を参照して後述するように、摺動ソケット203が後退端側に摺動して係合部212が当接した場合、当該係合部212の逆側にねじ頭部252が当接しているボルト250を、その磁力により保持する。
【0132】
以上、図3の第2把持治具23R2のうち、ボルト緩めツール74の構成について、図28乃至図30を参照して説明した。
次に、ボルト緩めツール74によりボルト250を緩める動作について、上述した図28に加えて、図31及び図32を参照して説明する。
【0133】
ボルト250を緩める前のボルト緩めツール74の状態は、図28に示すようになる。
即ち、ボルト緩めツール74は、初めに、図1の制御装置12の制御により、図28に示す状態になるように、摺動ソケット203の位置合わせを行う。
具体的には、流体機構204の流体通路222は、制御装置12の制御により、図示せぬ流体貯留源から供給されるエアーを流路を通じて前進端側に排出する。この時排出されるエアーの圧力は、本実施形態においては、1[kgf/cm2]に設定される。
この場合、流体通路222から排出されたエアーは、摺動ソケット203の係合部212に衝突し、その押圧力により摺動ソケット203を前進端側へ移動させる。
従って、ボルト250を緩める前にあっては、図1の制御装置12の制御により、摺動ソケット203を前進端側へ移動させることにより、摺動ソケット203をボルト250に係合させる位置で位置合わせすることができる。
この状態において、摺動ソケット203の前進端の内側の係合部212にボルト250のねじ頭部252が係合される位置まで、第2把持治具23R2(図1,図3)を移動させることにより、ボルト250のねじ外し位置に摺動ソケット203をセットすることができる。
【0134】
図31は、ボルト250を緩めている最中のボルト緩めツール74の縦断面図である。
ボルト緩めツール74は、図1の制御装置12の制御により、ボルト250を緩め、図示せぬ車のボディから取り外す。
具体的には、ギア202は、制御装置12の制御により、図示せぬ駆動源から供給される駆動力によりトルクを伝達し、筒201を周方向に回動させる。
この場合、周方向に駆動された筒201と、摺動ソケット203とは、互いに周方向に対し同期して回転するように係合されているため、筒201の回動に連動してトルクを伝達し摺動ソケット203も同様に周方向に回転する。
また、この場合、摺動ソケット203とボルト250のねじ頭部252とは、互いに周方向に対し同期して回動するように連結されているため、摺動ソケット203の回転に連動してトルクを伝達しボルト250も同様に周方向に回動する。
この場合、摺動ソケット203は、図1の制御装置12の制御によって、流体通路22からのエアーの排出を停止し、一端部から他端部に対しエアーを逆流させている。従って、摺動ソケット203に対する後退端側から前進端側へのエアーによる押圧は解除されている。
従って、この状態で、図1の制御装置12の制御によってボルト緩めツール74がボルト250を回して緩めることにより、ボルト250は軸力により浮き上がって後退端側へ移動し、摺動ソケット203は移動されたボルト250ごと前進端側から後退端側へ筒201内を摺動する。
そして、後退端側へ移動されたボルト250は、摺動ソケット203の流体機構204の基部221の前進端側の端部に設けられたマグネット206に当接することで吸着されロックされる。より正確には、ボルト250のねじ頭部252が当接した摺動ソケット203の係合部212がマグネット206に当接することで、ボルト250は係合部212越しにマグネット206に吸着されて固定される。
従って、ボルト250を緩める場合にあっては、図1の制御装置12の制御により、ボルト緩めツール74は、ギア202を駆動して筒201及び摺動ソケット203を回動することで、ボルト250を回して緩めることができる。そして、ボルト緩めツール74は、ボルト250のねじ頭部252(より正確には、摺動ソケット203の係合部212)を、流体機構204に設けられているマグネット206に当接させることができる。これにより、ボルト250は、マグネット206に吸着されて、ボルト緩めツール74の内部に保持される。
【0135】
図32は、ボルト250を排出している状態のボルト緩めツール74の縦断面図である。
図1の制御装置12の制御により、第2把持治具23R2の状態は、図3(A)の緩め位置状態から図3(B)の把持位置状態に遷移する。
この図3(B)の把持位置状態で、ボルト緩めツール74は、制御装置12の制御により、保持しているボルト250を外部のボルト排出機構76(図3)に排出する。
具体的には、流体機構204の流体通路222は、制御装置12の制御により、図示せぬ流体貯留源から供給されるエアーを、流路を通じてボルト250側に排出する。この時排出されるエアーの圧力は、本実施形態においては、1[kgf/cm2]に設定される。
この場合、流体通路222から排出されたエアーは、摺動ソケット203の係合部212に衝突し、その押圧力により摺動ソケット203をボルト250ごと前進端側へ移動させる。
この時、ボルト250が前進端側に移動されることにより、ボルト250とマグネット206とが離間され、ボルト250とマグネット206との間の磁力が弱まる結果、マグネット206によるボルト250の吸着が解除されロックが開放される。
このように、図1の制御装置12の制御によるエアーの排出によって、摺動ソケット203を前進端側へ移動させることにより、摺動ソケット203内のボルト250の保持を解除させ、ボルト250を外部のボルト排出機構76(図3)に排出することができる。
【0136】
ここで、ドア取り外し工程のボルト緩め動作に適用される手法について、本実施形態の手法と、従来の手法との差異について説明する。
【0137】
従来においては、電動ナットランナ等駆動源を持たせたロボットにて、ボルトを緩める手法が採用されていた。
即ち、従来においては、外れてくるボルトにあわせてロボットをフローティングさせたり、ツールにフローティング機構を付けてボルトの軸力でツールがフローティングする手法が採用されていた。
【0138】
このような従来の手法では、次のような第1乃至第3の問題点が生じていた。
第1の問題点とは、ものが大きいため、狭隘部や干渉が多い場では使用しにくいという問題点である。
第2の問題点とは、六角ナットでは使用できるが、長いボルトやフランジボルトには使用できないという問題点である。
第3の問題点とは、ロボットにてフローティングさせる場合、ボルトの動きにロボットの動きをあわせる必要があり、ロボットの移動動作のティーチングが複雑化される。
第4の問題点とは、クリアランスの少ない狭隘部にてツールがフローティングするので、フローティング量分ツールのサイズが小さくなくてはならないという問題点である。
【0139】
これに対して、図28乃至図32を用いて上述した本実施形態の手法を適用することで、これらの従来の第1乃至第4の問題点を解消することができる。
即ち、本実施形態の手法では、ボルト250を外す際ボルト緩めツール74を動かすことなく、摺動ソケット203内でボルト250を収納させることができる。
また、本実施形態のボルト緩めツール74は、ボルト250を緩めるためのトルクを摺動ソケット203を介して伝達することにより、ボルト250を軸力方向に摺動し、ボルト250をボルト緩めツール74内に収納することができる。これにより、従来は動かさなければならなかったボルト緩めツールを動かす必要がなくなり、第1の問題、第3の問題及び第4の問題が解消する。
また、本実施形態のボルト緩めツール74は、ボルト250を摺動ソケット203内に収納した後、マグネット206によりボルト250を吸着してロックすることができる。
また、本実施形態のボルト緩めツール74は、先行技術のように、ナットとボルトがそれぞれ単体でソケット内を摺動するのではなく、フランジボルトのようにナットとボルトが勘合した状態で摺動ソケット203内に収納される。そして、摺動ソケット203は、摺動ソケット203の外径形状に削られた筒201内を軸力方向に沿って摺動することができる。即ち、フランジボルトのように半径方向に突出したボルトであっても、緩めて取りはずし収納することができる。これにより、従来は摺動させることができなかった半径方向に突出したフランジボルト等であっても、ボルトの摺動及び排出を行うことができるようになり、第2の問題が解消する。
また、本実施形態のボルト緩めツール74は、ボルト250を緩めるための軸力方向への摺動及びボルト250の排出はエアーにより行われる。これにより、ボルトの動きに合わせてロボットを動かす必要がなくなり、第3の問題が解消する。
【0140】
このように、本実施形態のドア取り外しシステム1にソケットとして適用されたボルト緩めツール74は、
締結部品としてのボルト(上述の例ではボルト250)の取り外しに使用するためのソケットであって、
締結部品と係合する係合部212と、
係合部212を内側に有する摺動ソケット203と、
摺動ソケット203が摺動し、かつ、共に回転する回転自在な筒201と、
摺動ソケット203の後退端側に設けられ、係合部212の外側と接するマグネット206と、
摺動ソケット203を前進端側に押し出す流体(本実施形態ではエアー)を係合部212の外側に向かって排出する流体機構204と、
を備えている。
【0141】
これにより、本実施形態では、上述の(1)乃至(8)の効果に加えてさらに、次の(9)の効果を奏することが可能になる。
(9)ボルト250を取り外すときには、筒201を回転させることにより、係合部212に係合されたボルト250を回転させ緩めて取り外すことができるのみならず、緩めて外したボルト250をマグネット206で吸着し、摺動ソケット203内に保持することができる。
また、ボルト250の排出時には、筒201を逆方向に回転させることにより、ボルト250とマグネット206との間の磁力を弱めてマグネット206による保持を解除し、かつ、流体機構204から排出するエアーの勢いにより、ボルト250を摺動ソケット203外に排出することができる。
これにより、マグネット206と流体機構204とに基づきボルト250の緩め及び排出を行うことができるため、コンパクトなスペースでドアの取り外しを行うことができる。
【0142】
なお、本発明は本実施形態に限定されるものではなく、本発明の目的を達成できる範囲での変形、改良等は本発明に含まれるものである。
【0143】
例えば、双腕ロボット11の第1アーム22R1や第2アーム22R2に取り付けられるエンドエフェクタは、上述の例に特に限定されず、上述の各種動作を実現可能なツールであれば足りる。
【0144】
なお、本明細書において、ドア取り外しシステムの動作を記述するステップは、その順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的或いは個別に実行される処理をも含むものである。
【0145】
また、本明細書において、システムとは、複数の装置や処理部により構成される装置全体を表すものである。
【符号の説明】
【0146】
1 ドア取り外しシステム
11 双腕ロボット
12 制御装置
21 ロボット本体
22R1 第1アーム
22R2 第2アーム
23R1 第1把持治具
23R2 第2把持治具
24 ドアH受け部材
25 架台
31 基台部
32 第1旋回部
33 第2旋回部
41 昇降シリンダ
42 ウレタンパッド
43 計測シリンダ
51 支持部
52 フレーム
53 ドア把持パッド
54 ドア把持パッド
55 機種切替シフト
56 ドア開きピン
57 センサ
71 支持部
72 ドア把持パッド
73 フレーム
74 ボルト緩めツール
75 先端ツール切替機構
76 ボルト排出機構
171 把持部
172 フローティング機構
201 筒
202 ギア
203 摺動ソケット
204 流体機構
205 軸受
206 マグネット
211 側縁部
212 係合部
213 孔部
221 基部
222 流体通路
【特許請求の範囲】
【請求項1】
自動車のドアを把持するドア把持装置において、
前記ドアの重力方向の力を受ける荷重受けと、
前記ドアを把持する把持ツールと、
を備え、
前記把持治ツールは、2つの把持点の相対距離が可変な、前記ドアのインナパネルの開口部の前記2つの把持点の各々に当接する2つのパッドを有しており、
前記2つのパッドのうち、一方のパッドは、前記ドアの荷重方向の力を受ける方向に前記開口部の把持点に当接し、他方のパッドは、前記荷重受けと前記一方のパッドとにより発生するモーメントを受ける方向に前記開口部の別の把持点に当接する、
ドア把持装置。
【請求項2】
自動車のドアを把持する場合に前記ドアの重力方向の力を受ける荷重受けと、前記ドアを把持する把持ツールと、を備えるドア把持装置が実行するドア把持方法において、
前記把持治ツールは、2つの把持点の相対距離が可変な、前記ドアのインナパネルの開口部の前記2つの把持点の各々に当接する2つのパッドを有しており、
前記2つのパッドのうち、一方のパッドは、前記ドアの荷重方向の力を受ける方向に前記開口部の把持点に当接し、他方のパッドは、前記荷重受けと前記一方のパッドとにより発生するモーメントを受ける方向に前記開口部の別の把持点に当接する、
ドア把持方法。
【請求項1】
自動車のドアを把持するドア把持装置において、
前記ドアの重力方向の力を受ける荷重受けと、
前記ドアを把持する把持ツールと、
を備え、
前記把持治ツールは、2つの把持点の相対距離が可変な、前記ドアのインナパネルの開口部の前記2つの把持点の各々に当接する2つのパッドを有しており、
前記2つのパッドのうち、一方のパッドは、前記ドアの荷重方向の力を受ける方向に前記開口部の把持点に当接し、他方のパッドは、前記荷重受けと前記一方のパッドとにより発生するモーメントを受ける方向に前記開口部の別の把持点に当接する、
ドア把持装置。
【請求項2】
自動車のドアを把持する場合に前記ドアの重力方向の力を受ける荷重受けと、前記ドアを把持する把持ツールと、を備えるドア把持装置が実行するドア把持方法において、
前記把持治ツールは、2つの把持点の相対距離が可変な、前記ドアのインナパネルの開口部の前記2つの把持点の各々に当接する2つのパッドを有しており、
前記2つのパッドのうち、一方のパッドは、前記ドアの荷重方向の力を受ける方向に前記開口部の把持点に当接し、他方のパッドは、前記荷重受けと前記一方のパッドとにより発生するモーメントを受ける方向に前記開口部の別の把持点に当接する、
ドア把持方法。
【図1】


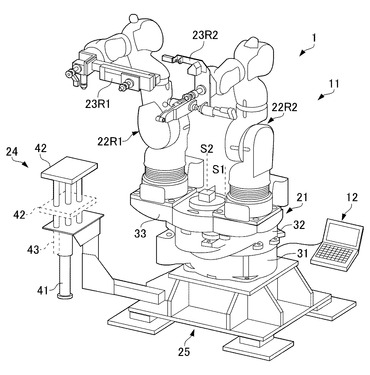
【図2】
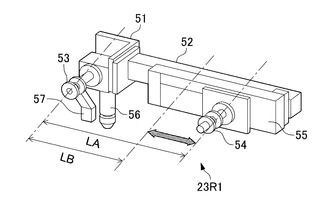
【図3】
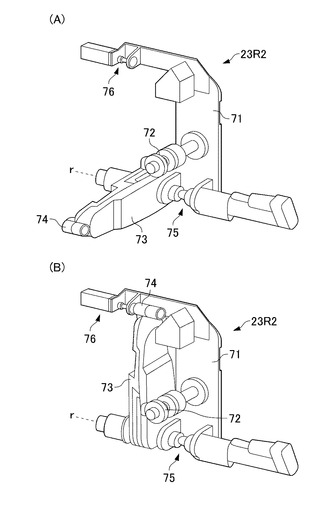
【図4】
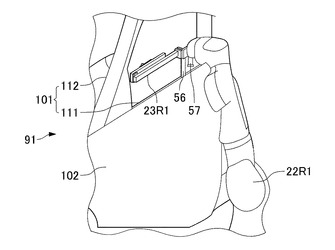
【図5】
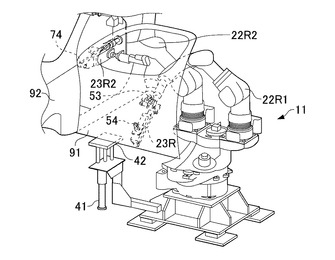
【図6】
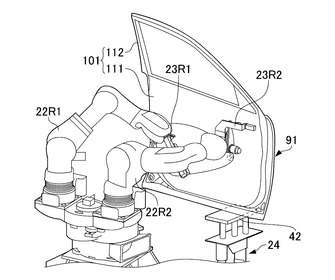
【図7】
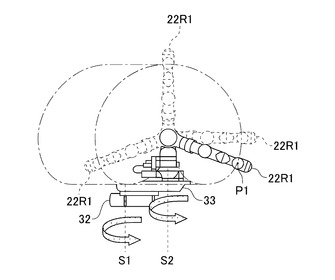
【図8】
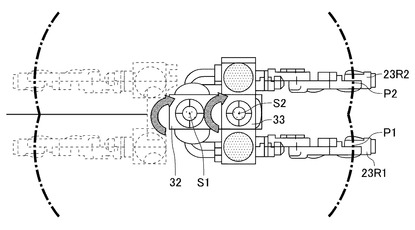
【図9】
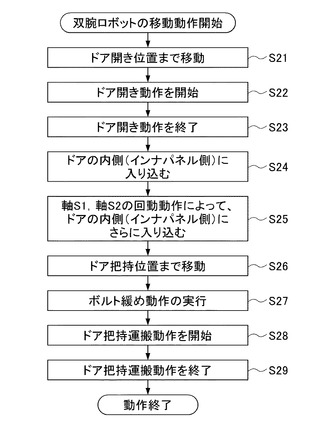
【図10】
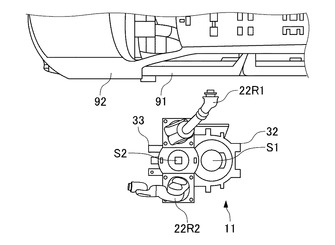
【図11】
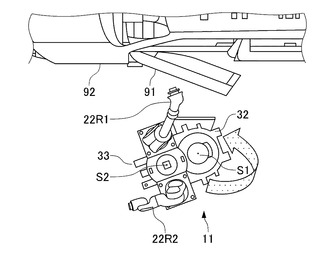
【図12】
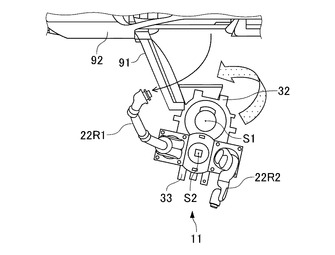
【図13】
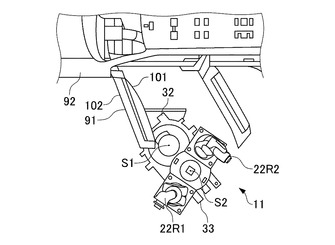
【図14】
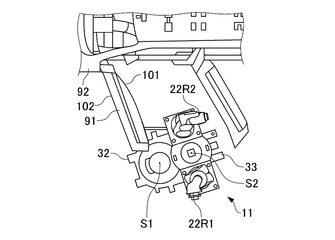
【図15】
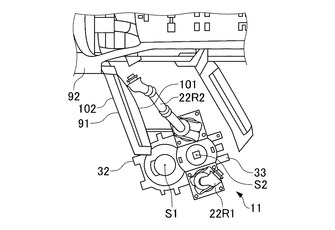
【図16】
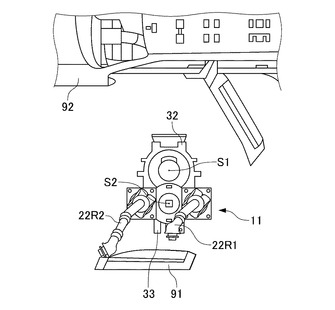
【図17】
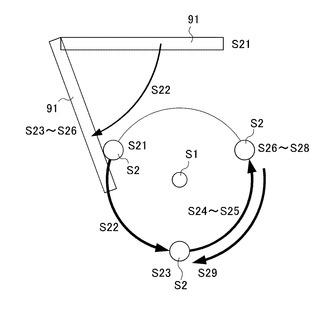
【図18】
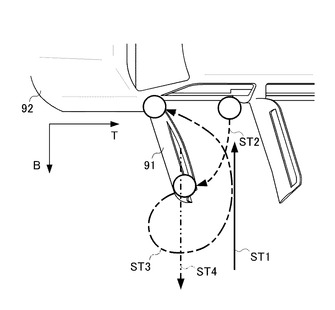
【図19】
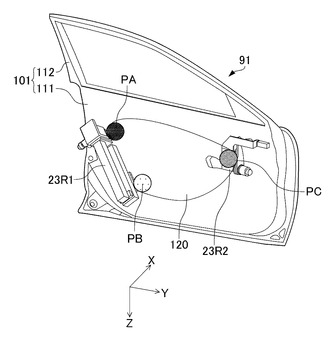
【図20】
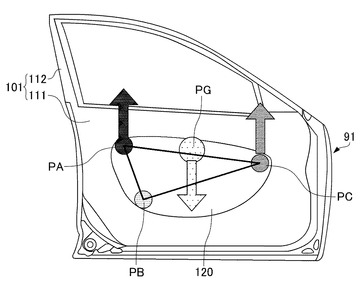
【図21】
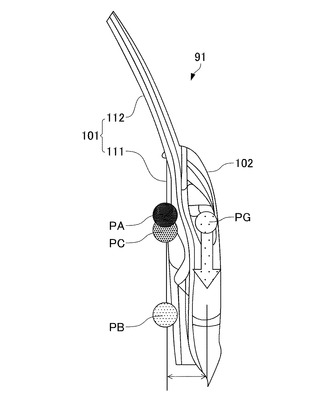
【図22】
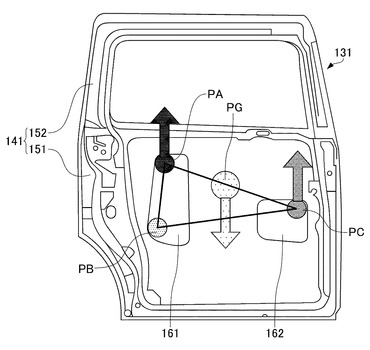
【図23】
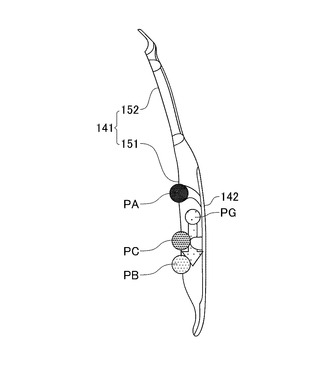
【図24】
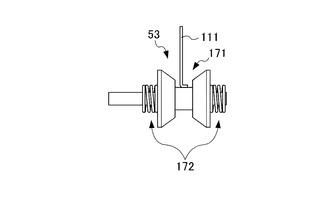
【図25】
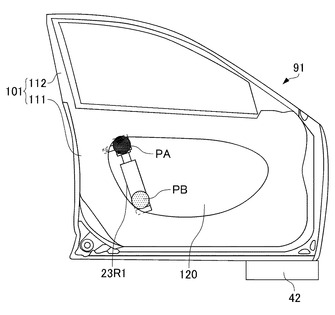
【図26】
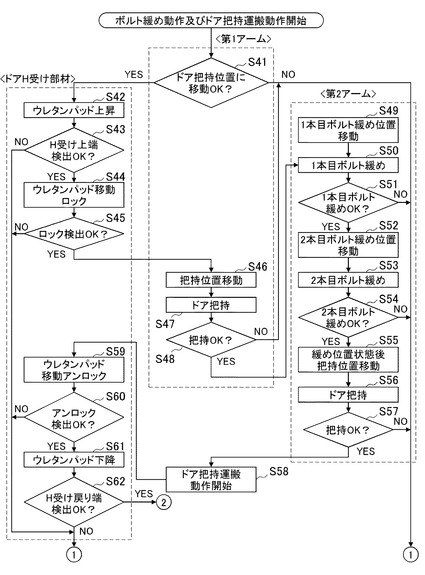
【図27】
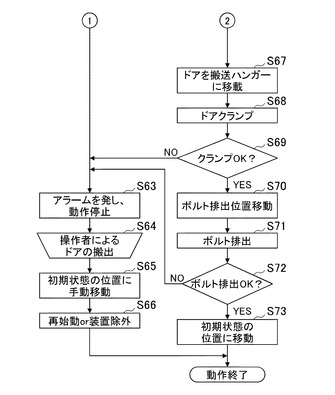
【図28】
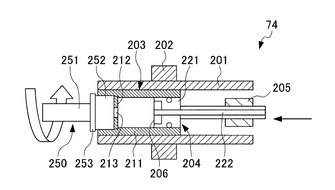
【図29】
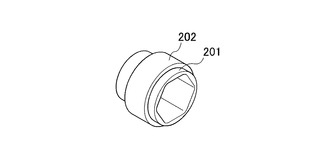
【図30】
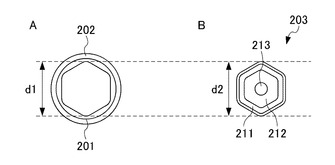
【図31】
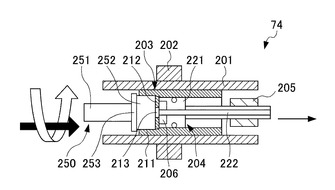
【図32】
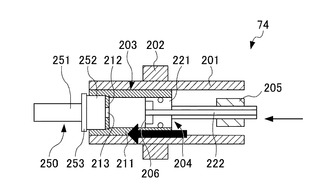
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【公開番号】特開2012−140022(P2012−140022A)
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願番号】特願2010−291808(P2010−291808)
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]