
ドップラーレーダ装置及びドップラー速度算出方法
【課題】干渉波による影響を除去してドップラー速度を算出する。
【解決手段】 IQ検波部171は、観測対象から反射された受信波の直交検波を行い、同相成分と直交成分を時系列で生成する。干渉波除去部172は、受信波に干渉波が混入しているか否かを、同相成分の時系列データ及び直交成分の時系列データに基づいて判定し、受信波に干渉波が混入していると判定した場合に、同相成分及び直交成分によって指定される受信波ベクトルの偏角の時間変化が連続性を維持するように、当該受信波ベクトルを補正する。ドップラーレーダ信号処理部173は、干渉波除去部172によって補正された受信波ベクトルの偏角の時間変化量に基づいて、観測対象のドップラー速度を算出する。
【解決手段】 IQ検波部171は、観測対象から反射された受信波の直交検波を行い、同相成分と直交成分を時系列で生成する。干渉波除去部172は、受信波に干渉波が混入しているか否かを、同相成分の時系列データ及び直交成分の時系列データに基づいて判定し、受信波に干渉波が混入していると判定した場合に、同相成分及び直交成分によって指定される受信波ベクトルの偏角の時間変化が連続性を維持するように、当該受信波ベクトルを補正する。ドップラーレーダ信号処理部173は、干渉波除去部172によって補正された受信波ベクトルの偏角の時間変化量に基づいて、観測対象のドップラー速度を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ドップラーレーダ装置及びドップラー速度算出方法に関する。
【背景技術】
【0002】
気象レーダは、雲や雨の降雨粒子によって反射されるエコーの強さを検出し、気象状況を観測あるいは予測するために用いられている。近年では、反射波のドップラー効果を利用して雨や雲の動的な変化を捉えることができるドップラーレーダが、気象レーダとして用いられるようになっている。
【0003】
観測対象がレーダに近づいている場合には、ドップラー効果のために受信周波数が高くなり、逆に観測対象が遠ざかっている場合には受信周波数が低くなる。ドップラーレーダは、このドップラー効果を利用しており、受信電波の周波数変化に基づいて、観測対象の移動速度を検出する。具体的には、ドップラーレーダは、観測対象によって反射された反射パルスを受信し、パルスヒット間の位相変化量に基づいてドップラー速度を検出する。
【0004】
ドップラーレーダを用いた観測の際に、他のレーダサイト等からの信号が干渉波として受信信号に混信することがある。また、マルチパスによる干渉が生じて、受信信号に不要な信号が混信することもある。このような干渉波を除去する技術として、非特許文献1には、干渉波が混入したと判定されたIQデータを、1ヒット前のIQデータで置換する技術が記載されている。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】気象庁,「空港気象ドップラーレーダー製作仕様書(鹿児島空港)」,平成18年5月,p.19
【発明の概要】
【発明が解決しようとする課題】
【0006】
雨量値等の受信電力強度を観測する場合、各ヒットの受信電力の平均値を受信電力強度に換算する。この場合には、上述のように干渉波による影響を受けたデータを1ヒット前のデータで置き換えても、得られる受信電力強度の値には大きな誤差は生じない。しかしながら、このようなデータの置き換えを行うと、ヒット間の位相変化の情報を保持することができなくなってしまう。このため、ヒット間の位相変化をドップラー速度として検出するドップラーレーダでは、干渉が生じた場合に、正しいドップラー速度が検出できないことがある。
【0007】
本発明は前記のような問題に鑑みなされたもので、干渉波による影響を除去することが可能なドップラーレーダ装置及びドップラー速度算出方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の一実施形態に係るドップラーレーダ装置は、観測対象から反射された受信波の直交検波を行い、同相成分と直交成分を時系列で生成する直交検波手段と、前記受信波に干渉波が混入しているか否かを、前記同相成分の時系列データ及び前記直交成分の時系列データに基づいて判定する干渉判定手段と、前記受信波に干渉波が混入していると前記干渉判定部が判定した場合に、前記同相成分及び前記直交成分によって指定される受信波ベクトルの偏角の時間変化が連続性を維持するよう前記受信波ベクトルを補正する補正手段と、前記補正手段によって補正された受信波ベクトルの偏角の時間変化量に基づいて、前記観測対象のドップラー速度を算出する算出手段とを具備する。
【0009】
また、本発明の一実施形態に係るドップラー速度算出方法は、観測対象から反射された受信波の直交検波を行い、同相成分と直交成分を時系列で生成する直交検波ステップと、前記受信波に干渉波が混入しているか否かを、前記同相成分の時系列データ及び前記直交成分の時系列データに基づいて判定する干渉判定ステップと、前記受信波に干渉波が混入していると判定された場合に、前記同相成分及び前記直交成分によって指定される受信波ベクトルの偏角の時間変化が連続性を維持するよう前記受信波ベクトルを補正する補正ステップと、前記補正された受信波ベクトルの偏角の時間変化量に基づいて、前記観測対象のドップラー速度を算出する算出ステップとを具備する。
【発明の効果】
【0010】
本発明の一実施形態に係るドップラーレーダ装置によれば、受信波に干渉波が混入していると判定された場合に、受信波ベクトルの偏角の時間変化が連続性を維持するよう当該受信波ベクトルを補正し、補正された受信波ベクトルの偏角の時間変化量に基づいて観測対象のドップラー速度を算出するため、干渉波による影響を除去することができる。
【0011】
本発明の一実施形態に係るドップラー速度算出方法によれば、受信波に干渉波が混入していると判定された場合に、受信波ベクトルの偏角の時間変化が連続性を維持するよう当該受信波ベクトルを補正し、補正された受信波ベクトルの偏角の時間変化量に基づいて測対象のドップラー速度を算出するため、干渉波による影響を除去することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施形態に係るドップラーレーダを用いた気象レーダシステムの構成を示すブロック図。
【図2】信号処理部の詳細な構成を示すブロック図。
【図3】Iデータ及びQデータに及ぼされる干渉波の影響の一例を示す図。
【図4】IQ平面上にベクトル表示された受信信号の一例を示す図。
【図5】本発明の一実施形態に係る干渉波除去処理を示すフローチャート。
【発明を実施するための形態】
【0013】
以下、図面を参照して本発明の実施の形態を詳細に説明する。
【0014】
図1は本発明の一実施形態に係るドップラーレーダを用いた気象レーダシステムの構成を示すブロック図である。この気象レーダシステムによれば、降水強度及びドップラー速度を観測することができる。
【0015】
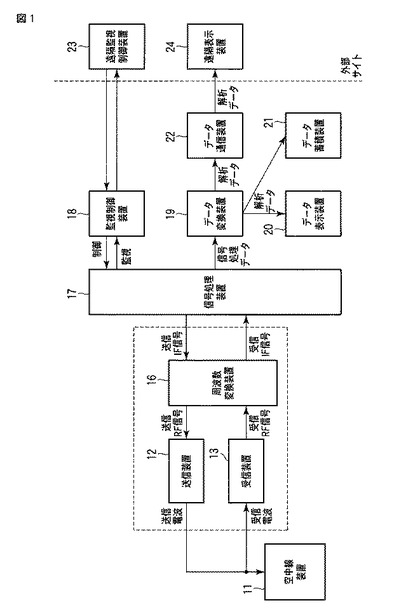
このシステムは、空中線装置(アンテナ)11、送信装置12、受信装置13、周波数変換装置16、信号処理装置17、監視制御装置18、データ変換装置19、データ表示装置20、データ蓄積装置21、データ通信装置22、遠隔監視制御装置23、遠隔表示装置24から構成される。
【0016】
このうち遠隔監視制御装置23及び遠隔表示装置24は、レーダサイトに設けられた他の装置からは遠方に設けられており、システムを遠隔監視及び遠隔制御するために用いられる。
【0017】
システムを監視又は制御するための監視制御信号は、遠隔監視制御装置23から監視制御装置18に送られる。監視制御装置18は、監視制御信号に応じて制御信号を信号処理装置17に送信する。また、監視制御装置18は、信号処理装置17からの監視信号を受信して遠隔監視制御装置23に転送する。
【0018】
信号処理装置17は、監視制御装置18からのデジタル制御信号に応じてアナログの送信IF(中間周波数)信号を周波数変換装置16に出力する。周波数変換装置16は、送信IF信号を送信RF(無線周波数)信号に変換(アップコンバート)し、送信装置12に出力する。送信装置12は、送信RF信号を遠距離での観測が可能な送信電力の送信電波に増幅し、空中線装置11に出力する。
【0019】
送信電波は空中線装置11から空中に放射され、観測対象によって反射される。気象レーダシステムにおける観測対象は、所定の有効反射面積内に存在する降雨粒子である。
【0020】
観測対象からの反射波(受信電波)は、空中線装置11によって捕捉され、受信装置13に受信される。受信装置13は、受信した受信電波を復調し、受信RF信号として周波数変換装置16に出力する。周波数変換装置16は、受信RF信号を受診IF信号に周波数変換(ダウンコンバート)して信号処理装置17に出力する。
【0021】
信号処理装置17は、周波数変換装置16から出力された受信IF信号に対して、IQ検波、アナログ−デジタル(A/D)変換、受信電力算出、干渉波除去、ドップラー速度算出等の、所要の信号処理を施す。
【0022】
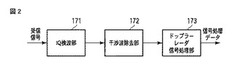
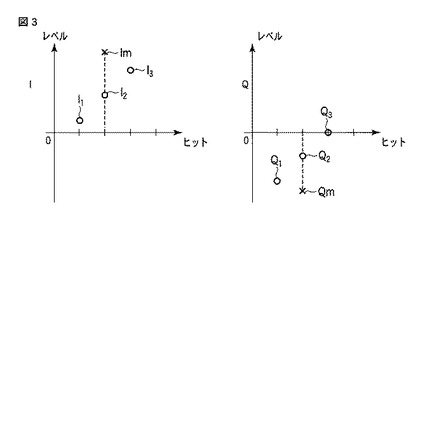
図2は、信号処理部17の詳細な構成を示すブロック図である。図2に示すように、信号処理部17は、IQ検波部171、干渉波除去部172、及びドップラーレーダ信号処理部173を備えている。
【0023】
IQ検波部171は、受信信号を2系統に分配して、互いに90°位相オフセットした基準中間周波数発信信号(COHO信号)によって直交検波(IQ検波)する。これによって、I(同相;In-phase)データ及びQ(直交;Quadrature)データが生成される。Iデータ及びQデータは、A/D変換回路(図示せず)よってA/D変換されて干渉波除去部172に出力される。
【0024】
干渉波除去部172は、後述する干渉波除去処理によって、IQデータから干渉波の影響を除去する。干渉波除去処理では、パルスヒット間で位相変化の時間連続性が保たれるようにデータ補正が行なわれる。この干渉波除去処理のため、干渉波除去部172は、所定のヒット数のIQ時系列データを保持するバッファを有していてもよい。
【0025】
ドップラーレーダ信号処理部173は、干渉波の影響が除去されたIQデータの平均電力に基づいて降水強度を算出し、また、IQデータの位相変化量からドップラー速度を算出する。
【0026】
信号処理装置17によってデジタル信号処理された信号処理データ(降水強度やドップラー速度)は、データ変換装置19に出力される。データ変換装置19は、信号処理装置17が算出した受信電力やドップラー速度に基づいて、データを解析しレーダ反射因子等を検出する。データ表示装置20は、例えばLCD等の表示装置であり、データ変換装置19で解析されたデータを表示する。データ蓄積装置21は、例えばハードディスクドライブ(HDD)等の記憶装置を有し、データ変換装置19で解析されたデータを蓄積する。
【0027】
データ通信装置22は、当該解析データを、無線又は有線の通信ネットワークを介してレーダサイト外の遠隔表示装置24に転送する。遠隔表示装置24は、例えばLCD等の表示装置を有し、データ通信装置22から転送されてきたデータを表示する。
【0028】
遠隔表示装置24に表示されたデータに基づいて、遠隔地からレーダサイトを解析し、遠隔監視制御装置23によってレーダサイトを監視及び制御することができる。
【0029】
上述したように、ドップラーレーダ信号処理部173は、レーダの平均の受信電力に基づいて降水強度を算出し、またIQ検波された受信信号の位相変化量からドップラー速度を算出する。この際、他のレーダサイトからの干渉波等による混信によって位相変化量が誤って検出されてしまうと、ドップラー速度が正しく算出されない。
【0030】
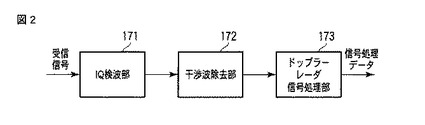
図3は、Iデータ及びQデータに及ぼされる干渉波の影響の一例を示す図である。図3に示す2つのグラフはそれぞれ、3パルスヒット分のI(同相)時系列データとQ(直交)時系列データを示す。図3に示す2つのグラフの横軸はそれぞれヒット数(時間)を表し、縦軸は信号レベルを表す。
【0031】
測定対象がレイリー確率分布に従う場合、IデータのレベルはI1,I2及びI3の3点で示されるように、連続的に時間変化(図3では時間的に線形増加)すると期待される。同様に、Qデータのレベルも、I1,I2及びI3にそれぞれ対応するQ1,Q2及びQ3の3点で示されるように、連続的に時間変化(図3では時間的に線形増加)すると期待される。
【0032】
しかしながら、受信信号が干渉波の影響を受けると、Iデータ及びQデータのレベルが変動してしまいかねない。図3に示す例では、2ヒット目の受信データI2及びQ2に干渉波の影響が生じている。このため、2ヒット目の受信データが連続的な変化から大きく外れしまい、I2及びQ2ではなく、及びQmとして観測される。
【0033】
このように干渉波の影響によってIQデータが連続性を損なうと、ドップラーレーダ信号処理部173によって検出される位相変化量が変動し、ドップラー速度が正しく算出されない。このため、不連続なデータ点を補正する必要がある。本実施形態では、干渉波によって生じた不連続なデータ点を干渉波除去部172によって補正して、位相変化の連続性を維持する。
【0034】
以下では、本実施形態による干渉の判定処理及び不連続なデータ点の補正処理について説明する。
【0035】
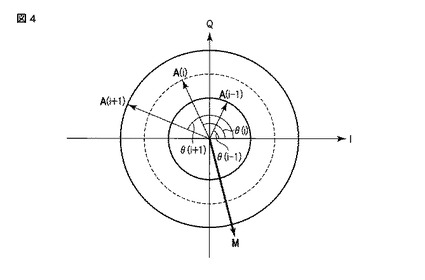
図4は、IQ平面上にベクトル表示された受信信号の一例を示す図である。
【0036】
図4に示すように、i番目(iは任意の整数)のヒットによる受信信号から検出されたIデータI(i)及びQデータQ(i)は、式(1)によって表現され、受信信号ベクトルA(i)としてIQ平面上に図示することができる。
【数1】

【0037】
ここで、受信信号ベクトルA(i)の大きさ(絶対値)|A(i)|は式(2)で、位相(偏角)θ(i)は式(3)で表される。
【数2】
【0038】
【数3】
【0039】
図4には、一例として以下の3つのベクトルが図示されている。
【数4】
【0040】
受信信号が干渉波の影響を受けていなければ、図4に示すように、受信信号ベクトルA(i−1),A(i)及びA(i+1)は連続性を維持する。すなわち、受信信号ベクトルA(i)の絶対値は、1ヒット前の受信信号ベクトルA(i−1)の絶対値と1ヒット後の受信信号ベクトルA(i+1)の絶対値の中間値程度になる。また、受信信号ベクトルA(i)の偏角は、1ヒット前の受信信号ベクトルA(i−1)の偏角と1ヒット後の受信信号ベクトルA(i+1)の偏角の中心付近の角度となる。
【0041】
しかしながら、例えばi番目のヒットの受信信号に干渉波が混在していると、図4に示すように、ベクトルA(i)とは偏角が大きく異なるベクトルM=(I´,Q´)が、受信信号ベクトルA(i)として検出されてしまう。
【0042】
検出された受信信号ベクトルA(i−1),M,及びA(i+1)に基づいてドップラー速度が算出されも、ベクトルMのために位相の連続性が保たれず、算出されたドップラー速度は正しい値とならない。
【0043】
また、従来のように干渉波が混入した受信信号ベクトルA(i)を1ヒット前の受信信号ベクトルA(i−1)で置き換えても、位相の連続性が保たれない。このため正しいドップラー速度が算出されない。
【0044】
本実施形態による干渉波除去部172は、図5に示す干渉波除去処理を行って、干渉波による影響を除去する。
【0045】
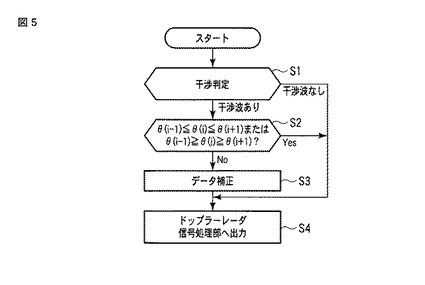
図5は、本実施形態に係る干渉波除去処理を示すフローチャートである。
【0046】
干渉波除去部172は、IQ検波部171から送られてきたIQデータに基づいて、干渉が生じているか否かを判定する(ステップS1)。干渉が生じているか否かは、式(5)のような干渉判定式によって判断される。
【数5】
【0047】
ここでC1及びC2は、所定の正の整数値をとる。すなわち、受信信号ベクトルA(i)とA(i−1)の差分ベクトルの絶対値が所定の値C1より小さく、また、受信信号ベクトルA(i+1)とA(i)の差分ベクトルの絶対値が所定の値C2よりも大きい場合に、i番目のヒットの受信信号が干渉波の影響を受けていると判定される。
【0048】
干渉波除去部172が、干渉が生じていないと判断した場合(ステップS1で「干渉波なし」)、すなわち干渉判定式(5)が成立しない場合は、IQデータはそのままドップラーレーダ信号処理部173に出力される(ステップS4)。
【0049】
一方、干渉が生じていると判断された場合(ステップS1で「干渉波あり」)、すなわち干渉判定式(5)が成立する場合は、受信信号ベクトルA(i)の偏角θ(i)が、所定の角度範囲内にあるか否かが判定される(ステップS2)。偏角θ(i)の角度範囲は、例えば式(6)によって定められる。
【数6】
【0050】
式(6)によれば、干渉波除去部172は、θ(i)が1ヒット前の受信信号ベクトルA(i−1)の偏角θ(i−1)と、1ヒット後の受信信号ベクトルA(i+1)の偏角θ(i+1)の間の角度範囲内にあるか否かを判定する。
【0051】
偏角θ(i)が所定の角度範囲内にあると干渉波除去部172が判断した場合(ステップS2でYes)、すなわち式(6)が成立する場合は、位相の連続性は保たれているとして、IQデータはそのままドップラーレーダ信号処理部173に出力される(ステップS4)。
【0052】
一方、偏角θ(i)が所定の角度範囲内にないと干渉波除去部172が判断した場合(ステップS2でNo)、すなわち式(6)が成立しない場合は、位相の連続性は保たれていないため、受信データの補正が行なわれる(ステップS3)。
【0053】
ステップS3におけるデータ補正は、受信信号ベクトルA(i)の偏角θ(i)が前後の受信信号ベクトルの偏角との間で連続性を保持するように行なわれる。
【0054】
データ補正の一例として、A(i)の絶対値|A(i)|を式(7)によって、また偏角θ(i)を式(8)によって補正することができる。
【数7】
【0055】
【数8】
【0056】
式(7)及び式(8)を用いる補正によれば、受信信号ベクトルA(i)の絶対値|A(i)|は、ベクトルA(i−1)の絶対値|A(i−1)|とベクトルA(i+1)の絶対値|A(i+1)|の相加平均となる。また、受信信号ベクトルA(i)の偏角θ(i)は、ベクトルA(i−1)の偏角θ(i−1)とベクトルA(i+1)の偏角θ(i+1)の中心となる。
【0057】
このため、補正された受信信号ベクトル受信信号ベクトルA(i)は、前後のベクトルA(i−1)とA(i+1)との間で連続性を保持する。
【0058】
補正された受信信号ベクトルを用いると、式(9)によって補正後のIデータ及びQデータを与えることができる。
【数9】
【0059】
また、データ補正の他の一例として、受信信号ベクトルA(i)の絶対値|A(i)|と偏角θ(i)ではなく、Iデータの値を式(10)によって、またQデータの値を式(11)によって補正してもよい。
【数10】
【0060】
【数11】
【0061】
補正された受信データ(IQデータ)は、ドップラーレーダ信号処理部173に出力される(ステップS4)。
【0062】
以上のように、本実施形態によれば、受信信号が干渉波の影響を受けていたとしても、位相の時間変化の連続性が保たれるように、受信データを補正することができる。このため、ドップラーレーダ信号処理部173は、より正確なドップラー速度を算出できるようになる。
【0063】
干渉波除去部172は、パルスヒット毎に上述の干渉波除去処理を行い、位相連続性を維持するIQデータをドップラーレーダ信号処理部173に出力する。
【0064】
本実施形態では、式(7)を用いて、受信信号ベクトルA(i)の絶対値|A(i)|が、ベクトルA(i−1)の絶対値|A(i−1)|とベクトルA(i+1)の絶対値|A(i+1)|の相加平均とした。しかしながら、受信信号ベクトルの絶対値の補正方法はこれに限定されず、例えば相乗平均等他の平均値が用いられてもよい。
【0065】
本実施形態では、ステップS1で干渉波があると判定された場合であっても、受信信号ベクトル偏角θ(i)が所定の角度範囲内である場合は、位相の連続性がある程度保たれているとみなしてデータの補正を行なわなかった。しかしながら、ステップS2の判定を行なわず、ステップS1で「干渉波あり」と判定された場合には必ずデータ補正を行なうようにしてもよい。
【0066】
また、本実施形態では、ステップS2において偏角θ(i)が1ヒット前の偏角θ(i−1)と、1ヒット後の偏角θ(i+1)の間の角度範囲内にあるか否かが判定された。しかしながら、この角度範囲は、レーダの精度に応じて広げてもよく、或いは狭めてもよい。
【0067】
本実施形態では、前後1ヒットの受信信号のデータを用いて干渉波除去処理を行った。しかしながら、前後複数ヒット分のデータを用いて干渉波除去を行なってもよい。
【0068】
上述の実施形態では、一例として、降雨量等を観測するための気象レーダにおける干渉波除去について説明した。しかしながら、上述の実施形態は、航空機を検出する空港監視レーダ等、他の1次レーダにも適用可能である。特に、航空機検出レーダでは、観測される受信波の振幅は変わらず、位相のみが変化する。本実施形態に係るドップラーレーダによれば、このように位相のみが変化する場合であっても、より正確に干渉波の影響を除去することができるようになる。
【0069】
上述のように、信号処理によって電波干渉の影響を除去することで、密な周波数配置や同一周波数の再利用等による周波数の有効利用を進展させることができるようになる。
【0070】
本願発明は、前記各実施形態に限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で種々に変形することが可能である。さらに、前記各実施形態には種々の段階の発明が含まれており、開示される複数の構成要件における適宜な組み合わせにより種々の発明が抽出され得る。例えば、1つの実施形態に示される全構成要件から幾つかの構成要件が削除されたり、幾つかの実施形態に示される構成要件が組み合わされても、発明が解決しようとする課題の欄で述べた課題が解決でき、発明の効果の欄で述べられている効果が得られる場合には、この構成要件が削除されたり組み合わされた構成が発明として抽出され得るものである。
【符号の説明】
【0071】
11…空中線装置(アンテナ)、12…送信装置、13…受信装置、16…周波数変換装置、17…信号処理装置、18…監視制御装置、19…データ変換装置、20…データ表示装置、21…データ蓄積装置、22…データ通信装置、23…遠隔監視制御装置、24…遠隔表示装置、171…IQ検波部、172…干渉波除去部、173…ドップラーレーダ信号処理部。
【技術分野】
【0001】
本発明は、ドップラーレーダ装置及びドップラー速度算出方法に関する。
【背景技術】
【0002】
気象レーダは、雲や雨の降雨粒子によって反射されるエコーの強さを検出し、気象状況を観測あるいは予測するために用いられている。近年では、反射波のドップラー効果を利用して雨や雲の動的な変化を捉えることができるドップラーレーダが、気象レーダとして用いられるようになっている。
【0003】
観測対象がレーダに近づいている場合には、ドップラー効果のために受信周波数が高くなり、逆に観測対象が遠ざかっている場合には受信周波数が低くなる。ドップラーレーダは、このドップラー効果を利用しており、受信電波の周波数変化に基づいて、観測対象の移動速度を検出する。具体的には、ドップラーレーダは、観測対象によって反射された反射パルスを受信し、パルスヒット間の位相変化量に基づいてドップラー速度を検出する。
【0004】
ドップラーレーダを用いた観測の際に、他のレーダサイト等からの信号が干渉波として受信信号に混信することがある。また、マルチパスによる干渉が生じて、受信信号に不要な信号が混信することもある。このような干渉波を除去する技術として、非特許文献1には、干渉波が混入したと判定されたIQデータを、1ヒット前のIQデータで置換する技術が記載されている。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】気象庁,「空港気象ドップラーレーダー製作仕様書(鹿児島空港)」,平成18年5月,p.19
【発明の概要】
【発明が解決しようとする課題】
【0006】
雨量値等の受信電力強度を観測する場合、各ヒットの受信電力の平均値を受信電力強度に換算する。この場合には、上述のように干渉波による影響を受けたデータを1ヒット前のデータで置き換えても、得られる受信電力強度の値には大きな誤差は生じない。しかしながら、このようなデータの置き換えを行うと、ヒット間の位相変化の情報を保持することができなくなってしまう。このため、ヒット間の位相変化をドップラー速度として検出するドップラーレーダでは、干渉が生じた場合に、正しいドップラー速度が検出できないことがある。
【0007】
本発明は前記のような問題に鑑みなされたもので、干渉波による影響を除去することが可能なドップラーレーダ装置及びドップラー速度算出方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の一実施形態に係るドップラーレーダ装置は、観測対象から反射された受信波の直交検波を行い、同相成分と直交成分を時系列で生成する直交検波手段と、前記受信波に干渉波が混入しているか否かを、前記同相成分の時系列データ及び前記直交成分の時系列データに基づいて判定する干渉判定手段と、前記受信波に干渉波が混入していると前記干渉判定部が判定した場合に、前記同相成分及び前記直交成分によって指定される受信波ベクトルの偏角の時間変化が連続性を維持するよう前記受信波ベクトルを補正する補正手段と、前記補正手段によって補正された受信波ベクトルの偏角の時間変化量に基づいて、前記観測対象のドップラー速度を算出する算出手段とを具備する。
【0009】
また、本発明の一実施形態に係るドップラー速度算出方法は、観測対象から反射された受信波の直交検波を行い、同相成分と直交成分を時系列で生成する直交検波ステップと、前記受信波に干渉波が混入しているか否かを、前記同相成分の時系列データ及び前記直交成分の時系列データに基づいて判定する干渉判定ステップと、前記受信波に干渉波が混入していると判定された場合に、前記同相成分及び前記直交成分によって指定される受信波ベクトルの偏角の時間変化が連続性を維持するよう前記受信波ベクトルを補正する補正ステップと、前記補正された受信波ベクトルの偏角の時間変化量に基づいて、前記観測対象のドップラー速度を算出する算出ステップとを具備する。
【発明の効果】
【0010】
本発明の一実施形態に係るドップラーレーダ装置によれば、受信波に干渉波が混入していると判定された場合に、受信波ベクトルの偏角の時間変化が連続性を維持するよう当該受信波ベクトルを補正し、補正された受信波ベクトルの偏角の時間変化量に基づいて観測対象のドップラー速度を算出するため、干渉波による影響を除去することができる。
【0011】
本発明の一実施形態に係るドップラー速度算出方法によれば、受信波に干渉波が混入していると判定された場合に、受信波ベクトルの偏角の時間変化が連続性を維持するよう当該受信波ベクトルを補正し、補正された受信波ベクトルの偏角の時間変化量に基づいて測対象のドップラー速度を算出するため、干渉波による影響を除去することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施形態に係るドップラーレーダを用いた気象レーダシステムの構成を示すブロック図。
【図2】信号処理部の詳細な構成を示すブロック図。
【図3】Iデータ及びQデータに及ぼされる干渉波の影響の一例を示す図。
【図4】IQ平面上にベクトル表示された受信信号の一例を示す図。
【図5】本発明の一実施形態に係る干渉波除去処理を示すフローチャート。
【発明を実施するための形態】
【0013】
以下、図面を参照して本発明の実施の形態を詳細に説明する。
【0014】
図1は本発明の一実施形態に係るドップラーレーダを用いた気象レーダシステムの構成を示すブロック図である。この気象レーダシステムによれば、降水強度及びドップラー速度を観測することができる。
【0015】
このシステムは、空中線装置(アンテナ)11、送信装置12、受信装置13、周波数変換装置16、信号処理装置17、監視制御装置18、データ変換装置19、データ表示装置20、データ蓄積装置21、データ通信装置22、遠隔監視制御装置23、遠隔表示装置24から構成される。
【0016】
このうち遠隔監視制御装置23及び遠隔表示装置24は、レーダサイトに設けられた他の装置からは遠方に設けられており、システムを遠隔監視及び遠隔制御するために用いられる。
【0017】
システムを監視又は制御するための監視制御信号は、遠隔監視制御装置23から監視制御装置18に送られる。監視制御装置18は、監視制御信号に応じて制御信号を信号処理装置17に送信する。また、監視制御装置18は、信号処理装置17からの監視信号を受信して遠隔監視制御装置23に転送する。
【0018】
信号処理装置17は、監視制御装置18からのデジタル制御信号に応じてアナログの送信IF(中間周波数)信号を周波数変換装置16に出力する。周波数変換装置16は、送信IF信号を送信RF(無線周波数)信号に変換(アップコンバート)し、送信装置12に出力する。送信装置12は、送信RF信号を遠距離での観測が可能な送信電力の送信電波に増幅し、空中線装置11に出力する。
【0019】
送信電波は空中線装置11から空中に放射され、観測対象によって反射される。気象レーダシステムにおける観測対象は、所定の有効反射面積内に存在する降雨粒子である。
【0020】
観測対象からの反射波(受信電波)は、空中線装置11によって捕捉され、受信装置13に受信される。受信装置13は、受信した受信電波を復調し、受信RF信号として周波数変換装置16に出力する。周波数変換装置16は、受信RF信号を受診IF信号に周波数変換(ダウンコンバート)して信号処理装置17に出力する。
【0021】
信号処理装置17は、周波数変換装置16から出力された受信IF信号に対して、IQ検波、アナログ−デジタル(A/D)変換、受信電力算出、干渉波除去、ドップラー速度算出等の、所要の信号処理を施す。
【0022】
図2は、信号処理部17の詳細な構成を示すブロック図である。図2に示すように、信号処理部17は、IQ検波部171、干渉波除去部172、及びドップラーレーダ信号処理部173を備えている。
【0023】
IQ検波部171は、受信信号を2系統に分配して、互いに90°位相オフセットした基準中間周波数発信信号(COHO信号)によって直交検波(IQ検波)する。これによって、I(同相;In-phase)データ及びQ(直交;Quadrature)データが生成される。Iデータ及びQデータは、A/D変換回路(図示せず)よってA/D変換されて干渉波除去部172に出力される。
【0024】
干渉波除去部172は、後述する干渉波除去処理によって、IQデータから干渉波の影響を除去する。干渉波除去処理では、パルスヒット間で位相変化の時間連続性が保たれるようにデータ補正が行なわれる。この干渉波除去処理のため、干渉波除去部172は、所定のヒット数のIQ時系列データを保持するバッファを有していてもよい。
【0025】
ドップラーレーダ信号処理部173は、干渉波の影響が除去されたIQデータの平均電力に基づいて降水強度を算出し、また、IQデータの位相変化量からドップラー速度を算出する。
【0026】
信号処理装置17によってデジタル信号処理された信号処理データ(降水強度やドップラー速度)は、データ変換装置19に出力される。データ変換装置19は、信号処理装置17が算出した受信電力やドップラー速度に基づいて、データを解析しレーダ反射因子等を検出する。データ表示装置20は、例えばLCD等の表示装置であり、データ変換装置19で解析されたデータを表示する。データ蓄積装置21は、例えばハードディスクドライブ(HDD)等の記憶装置を有し、データ変換装置19で解析されたデータを蓄積する。
【0027】
データ通信装置22は、当該解析データを、無線又は有線の通信ネットワークを介してレーダサイト外の遠隔表示装置24に転送する。遠隔表示装置24は、例えばLCD等の表示装置を有し、データ通信装置22から転送されてきたデータを表示する。
【0028】
遠隔表示装置24に表示されたデータに基づいて、遠隔地からレーダサイトを解析し、遠隔監視制御装置23によってレーダサイトを監視及び制御することができる。
【0029】
上述したように、ドップラーレーダ信号処理部173は、レーダの平均の受信電力に基づいて降水強度を算出し、またIQ検波された受信信号の位相変化量からドップラー速度を算出する。この際、他のレーダサイトからの干渉波等による混信によって位相変化量が誤って検出されてしまうと、ドップラー速度が正しく算出されない。
【0030】
図3は、Iデータ及びQデータに及ぼされる干渉波の影響の一例を示す図である。図3に示す2つのグラフはそれぞれ、3パルスヒット分のI(同相)時系列データとQ(直交)時系列データを示す。図3に示す2つのグラフの横軸はそれぞれヒット数(時間)を表し、縦軸は信号レベルを表す。
【0031】
測定対象がレイリー確率分布に従う場合、IデータのレベルはI1,I2及びI3の3点で示されるように、連続的に時間変化(図3では時間的に線形増加)すると期待される。同様に、Qデータのレベルも、I1,I2及びI3にそれぞれ対応するQ1,Q2及びQ3の3点で示されるように、連続的に時間変化(図3では時間的に線形増加)すると期待される。
【0032】
しかしながら、受信信号が干渉波の影響を受けると、Iデータ及びQデータのレベルが変動してしまいかねない。図3に示す例では、2ヒット目の受信データI2及びQ2に干渉波の影響が生じている。このため、2ヒット目の受信データが連続的な変化から大きく外れしまい、I2及びQ2ではなく、及びQmとして観測される。
【0033】
このように干渉波の影響によってIQデータが連続性を損なうと、ドップラーレーダ信号処理部173によって検出される位相変化量が変動し、ドップラー速度が正しく算出されない。このため、不連続なデータ点を補正する必要がある。本実施形態では、干渉波によって生じた不連続なデータ点を干渉波除去部172によって補正して、位相変化の連続性を維持する。
【0034】
以下では、本実施形態による干渉の判定処理及び不連続なデータ点の補正処理について説明する。
【0035】
図4は、IQ平面上にベクトル表示された受信信号の一例を示す図である。
【0036】
図4に示すように、i番目(iは任意の整数)のヒットによる受信信号から検出されたIデータI(i)及びQデータQ(i)は、式(1)によって表現され、受信信号ベクトルA(i)としてIQ平面上に図示することができる。
【数1】
【0037】
ここで、受信信号ベクトルA(i)の大きさ(絶対値)|A(i)|は式(2)で、位相(偏角)θ(i)は式(3)で表される。
【数2】
【0038】
【数3】
【0039】
図4には、一例として以下の3つのベクトルが図示されている。
【数4】
【0040】
受信信号が干渉波の影響を受けていなければ、図4に示すように、受信信号ベクトルA(i−1),A(i)及びA(i+1)は連続性を維持する。すなわち、受信信号ベクトルA(i)の絶対値は、1ヒット前の受信信号ベクトルA(i−1)の絶対値と1ヒット後の受信信号ベクトルA(i+1)の絶対値の中間値程度になる。また、受信信号ベクトルA(i)の偏角は、1ヒット前の受信信号ベクトルA(i−1)の偏角と1ヒット後の受信信号ベクトルA(i+1)の偏角の中心付近の角度となる。
【0041】
しかしながら、例えばi番目のヒットの受信信号に干渉波が混在していると、図4に示すように、ベクトルA(i)とは偏角が大きく異なるベクトルM=(I´,Q´)が、受信信号ベクトルA(i)として検出されてしまう。
【0042】
検出された受信信号ベクトルA(i−1),M,及びA(i+1)に基づいてドップラー速度が算出されも、ベクトルMのために位相の連続性が保たれず、算出されたドップラー速度は正しい値とならない。
【0043】
また、従来のように干渉波が混入した受信信号ベクトルA(i)を1ヒット前の受信信号ベクトルA(i−1)で置き換えても、位相の連続性が保たれない。このため正しいドップラー速度が算出されない。
【0044】
本実施形態による干渉波除去部172は、図5に示す干渉波除去処理を行って、干渉波による影響を除去する。
【0045】
図5は、本実施形態に係る干渉波除去処理を示すフローチャートである。
【0046】
干渉波除去部172は、IQ検波部171から送られてきたIQデータに基づいて、干渉が生じているか否かを判定する(ステップS1)。干渉が生じているか否かは、式(5)のような干渉判定式によって判断される。
【数5】
【0047】
ここでC1及びC2は、所定の正の整数値をとる。すなわち、受信信号ベクトルA(i)とA(i−1)の差分ベクトルの絶対値が所定の値C1より小さく、また、受信信号ベクトルA(i+1)とA(i)の差分ベクトルの絶対値が所定の値C2よりも大きい場合に、i番目のヒットの受信信号が干渉波の影響を受けていると判定される。
【0048】
干渉波除去部172が、干渉が生じていないと判断した場合(ステップS1で「干渉波なし」)、すなわち干渉判定式(5)が成立しない場合は、IQデータはそのままドップラーレーダ信号処理部173に出力される(ステップS4)。
【0049】
一方、干渉が生じていると判断された場合(ステップS1で「干渉波あり」)、すなわち干渉判定式(5)が成立する場合は、受信信号ベクトルA(i)の偏角θ(i)が、所定の角度範囲内にあるか否かが判定される(ステップS2)。偏角θ(i)の角度範囲は、例えば式(6)によって定められる。
【数6】
【0050】
式(6)によれば、干渉波除去部172は、θ(i)が1ヒット前の受信信号ベクトルA(i−1)の偏角θ(i−1)と、1ヒット後の受信信号ベクトルA(i+1)の偏角θ(i+1)の間の角度範囲内にあるか否かを判定する。
【0051】
偏角θ(i)が所定の角度範囲内にあると干渉波除去部172が判断した場合(ステップS2でYes)、すなわち式(6)が成立する場合は、位相の連続性は保たれているとして、IQデータはそのままドップラーレーダ信号処理部173に出力される(ステップS4)。
【0052】
一方、偏角θ(i)が所定の角度範囲内にないと干渉波除去部172が判断した場合(ステップS2でNo)、すなわち式(6)が成立しない場合は、位相の連続性は保たれていないため、受信データの補正が行なわれる(ステップS3)。
【0053】
ステップS3におけるデータ補正は、受信信号ベクトルA(i)の偏角θ(i)が前後の受信信号ベクトルの偏角との間で連続性を保持するように行なわれる。
【0054】
データ補正の一例として、A(i)の絶対値|A(i)|を式(7)によって、また偏角θ(i)を式(8)によって補正することができる。
【数7】
【0055】
【数8】
【0056】
式(7)及び式(8)を用いる補正によれば、受信信号ベクトルA(i)の絶対値|A(i)|は、ベクトルA(i−1)の絶対値|A(i−1)|とベクトルA(i+1)の絶対値|A(i+1)|の相加平均となる。また、受信信号ベクトルA(i)の偏角θ(i)は、ベクトルA(i−1)の偏角θ(i−1)とベクトルA(i+1)の偏角θ(i+1)の中心となる。
【0057】
このため、補正された受信信号ベクトル受信信号ベクトルA(i)は、前後のベクトルA(i−1)とA(i+1)との間で連続性を保持する。
【0058】
補正された受信信号ベクトルを用いると、式(9)によって補正後のIデータ及びQデータを与えることができる。
【数9】
【0059】
また、データ補正の他の一例として、受信信号ベクトルA(i)の絶対値|A(i)|と偏角θ(i)ではなく、Iデータの値を式(10)によって、またQデータの値を式(11)によって補正してもよい。
【数10】
【0060】
【数11】
【0061】
補正された受信データ(IQデータ)は、ドップラーレーダ信号処理部173に出力される(ステップS4)。
【0062】
以上のように、本実施形態によれば、受信信号が干渉波の影響を受けていたとしても、位相の時間変化の連続性が保たれるように、受信データを補正することができる。このため、ドップラーレーダ信号処理部173は、より正確なドップラー速度を算出できるようになる。
【0063】
干渉波除去部172は、パルスヒット毎に上述の干渉波除去処理を行い、位相連続性を維持するIQデータをドップラーレーダ信号処理部173に出力する。
【0064】
本実施形態では、式(7)を用いて、受信信号ベクトルA(i)の絶対値|A(i)|が、ベクトルA(i−1)の絶対値|A(i−1)|とベクトルA(i+1)の絶対値|A(i+1)|の相加平均とした。しかしながら、受信信号ベクトルの絶対値の補正方法はこれに限定されず、例えば相乗平均等他の平均値が用いられてもよい。
【0065】
本実施形態では、ステップS1で干渉波があると判定された場合であっても、受信信号ベクトル偏角θ(i)が所定の角度範囲内である場合は、位相の連続性がある程度保たれているとみなしてデータの補正を行なわなかった。しかしながら、ステップS2の判定を行なわず、ステップS1で「干渉波あり」と判定された場合には必ずデータ補正を行なうようにしてもよい。
【0066】
また、本実施形態では、ステップS2において偏角θ(i)が1ヒット前の偏角θ(i−1)と、1ヒット後の偏角θ(i+1)の間の角度範囲内にあるか否かが判定された。しかしながら、この角度範囲は、レーダの精度に応じて広げてもよく、或いは狭めてもよい。
【0067】
本実施形態では、前後1ヒットの受信信号のデータを用いて干渉波除去処理を行った。しかしながら、前後複数ヒット分のデータを用いて干渉波除去を行なってもよい。
【0068】
上述の実施形態では、一例として、降雨量等を観測するための気象レーダにおける干渉波除去について説明した。しかしながら、上述の実施形態は、航空機を検出する空港監視レーダ等、他の1次レーダにも適用可能である。特に、航空機検出レーダでは、観測される受信波の振幅は変わらず、位相のみが変化する。本実施形態に係るドップラーレーダによれば、このように位相のみが変化する場合であっても、より正確に干渉波の影響を除去することができるようになる。
【0069】
上述のように、信号処理によって電波干渉の影響を除去することで、密な周波数配置や同一周波数の再利用等による周波数の有効利用を進展させることができるようになる。
【0070】
本願発明は、前記各実施形態に限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で種々に変形することが可能である。さらに、前記各実施形態には種々の段階の発明が含まれており、開示される複数の構成要件における適宜な組み合わせにより種々の発明が抽出され得る。例えば、1つの実施形態に示される全構成要件から幾つかの構成要件が削除されたり、幾つかの実施形態に示される構成要件が組み合わされても、発明が解決しようとする課題の欄で述べた課題が解決でき、発明の効果の欄で述べられている効果が得られる場合には、この構成要件が削除されたり組み合わされた構成が発明として抽出され得るものである。
【符号の説明】
【0071】
11…空中線装置(アンテナ)、12…送信装置、13…受信装置、16…周波数変換装置、17…信号処理装置、18…監視制御装置、19…データ変換装置、20…データ表示装置、21…データ蓄積装置、22…データ通信装置、23…遠隔監視制御装置、24…遠隔表示装置、171…IQ検波部、172…干渉波除去部、173…ドップラーレーダ信号処理部。
【特許請求の範囲】
【請求項1】
観測対象から反射された受信波の直交検波を行い、同相成分と直交成分を時系列で生成する直交検波手段と、
前記受信波に干渉波が混入しているか否かを、前記同相成分の時系列データ及び前記直交成分の時系列データに基づいて判定する干渉判定手段と、
前記受信波に干渉波が混入していると前記干渉判定部が判定した場合に、前記同相成分及び前記直交成分によって指定される受信波ベクトルの偏角の時間変化が連続性を維持するよう前記受信波ベクトルを補正する補正手段と、
前記補正手段によって補正された受信波ベクトルの偏角の時間変化量に基づいて、前記観測対象のドップラー速度を算出する算出手段と、
を具備することを特徴とするドップラーレーダ装置。
【請求項2】
前記補正手段は、前記受信波ベクトルの偏角が、所定の角度範囲内のとなるよう前記受信波ベクトルを補正することを特徴とする請求項1に記載のドップラーレーダ装置。
【請求項3】
前記直交検波手段によって時系列で生成される前記同相成分と前記直交成分は、前記受信波ベクトルの各成分を時系列で構成し、
前記補正手段は、前記受信波ベクトルの偏角が、時間的に前及び後の受信波ベクトルの偏角の間の角度となるよう前記受信波ベクトルを補正することを特徴とする請求項1に記載のドップラーレーダ装置。
【請求項4】
前記補正手段は、前記受信波ベクトルの絶対値が、時間的に前及び後の受信波ベクトルの絶対値の平均値となるよう前記受信波ベクトルを補正することを特徴とする請求項3に記載のドップラーレーダ装置。
【請求項5】
前記補正手段は、前記同相成分と前記直交成分の時間平均値が、前記受信波ベクトルの成分となるよう前記受信波ベクトルを補正することを特徴とする請求項1に記載のドップラーレーダ装置。
【請求項6】
観測対象から反射された受信波の直交検波を行い、同相成分と直交成分を時系列で生成する直交検波ステップと、
前記受信波に干渉波が混入しているか否かを、前記同相成分の時系列データ及び前記直交成分の時系列データに基づいて判定する干渉判定ステップと、
前記受信波に干渉波が混入していると判定された場合に、前記同相成分及び前記直交成分によって指定される受信波ベクトルの偏角の時間変化が連続性を維持するよう前記受信波ベクトルを補正する補正ステップと、
前記補正された受信波ベクトルの偏角の時間変化量に基づいて、前記観測対象のドップラー速度を算出する算出ステップと、
を具備することを特徴とするドップラー速度算出方法。
【請求項7】
前記補正ステップでは、前記受信波ベクトルの偏角が、所定の角度範囲内のとなるよう前記受信波ベクトルが補正されることを特徴とする請求項6に記載のドップラー速度算出方法。
【請求項8】
前記時系列で生成される前記同相成分と前記直交成分は、前記受信波ベクトルの各成分を時系列で構成し、
前記補正ステップでは、前記受信波ベクトルの偏角が、時間的に前及び後の受信波ベクトルの偏角の間の角度となるよう前記受信波ベクトルが補正されることを特徴とする請求項6に記載のドップラー速度算出方法。
【請求項9】
前記補正手段ステップでは、前記受信波ベクトルの絶対値が、時間的に前及び後の受信波ベクトルの絶対値の平均値となるよう前記受信波ベクトルが補正されることを特徴とする請求項8に記載のドップラー速度算出方法。
【請求項10】
前記補正ステップは、前記同相成分と前記直交成分の時間平均値が、前記受信波ベクトルの成分となるよう前記受信波ベクトルが補正されることを特徴とする請求項6に記載のドップラー速度算出方法。
【請求項1】
観測対象から反射された受信波の直交検波を行い、同相成分と直交成分を時系列で生成する直交検波手段と、
前記受信波に干渉波が混入しているか否かを、前記同相成分の時系列データ及び前記直交成分の時系列データに基づいて判定する干渉判定手段と、
前記受信波に干渉波が混入していると前記干渉判定部が判定した場合に、前記同相成分及び前記直交成分によって指定される受信波ベクトルの偏角の時間変化が連続性を維持するよう前記受信波ベクトルを補正する補正手段と、
前記補正手段によって補正された受信波ベクトルの偏角の時間変化量に基づいて、前記観測対象のドップラー速度を算出する算出手段と、
を具備することを特徴とするドップラーレーダ装置。
【請求項2】
前記補正手段は、前記受信波ベクトルの偏角が、所定の角度範囲内のとなるよう前記受信波ベクトルを補正することを特徴とする請求項1に記載のドップラーレーダ装置。
【請求項3】
前記直交検波手段によって時系列で生成される前記同相成分と前記直交成分は、前記受信波ベクトルの各成分を時系列で構成し、
前記補正手段は、前記受信波ベクトルの偏角が、時間的に前及び後の受信波ベクトルの偏角の間の角度となるよう前記受信波ベクトルを補正することを特徴とする請求項1に記載のドップラーレーダ装置。
【請求項4】
前記補正手段は、前記受信波ベクトルの絶対値が、時間的に前及び後の受信波ベクトルの絶対値の平均値となるよう前記受信波ベクトルを補正することを特徴とする請求項3に記載のドップラーレーダ装置。
【請求項5】
前記補正手段は、前記同相成分と前記直交成分の時間平均値が、前記受信波ベクトルの成分となるよう前記受信波ベクトルを補正することを特徴とする請求項1に記載のドップラーレーダ装置。
【請求項6】
観測対象から反射された受信波の直交検波を行い、同相成分と直交成分を時系列で生成する直交検波ステップと、
前記受信波に干渉波が混入しているか否かを、前記同相成分の時系列データ及び前記直交成分の時系列データに基づいて判定する干渉判定ステップと、
前記受信波に干渉波が混入していると判定された場合に、前記同相成分及び前記直交成分によって指定される受信波ベクトルの偏角の時間変化が連続性を維持するよう前記受信波ベクトルを補正する補正ステップと、
前記補正された受信波ベクトルの偏角の時間変化量に基づいて、前記観測対象のドップラー速度を算出する算出ステップと、
を具備することを特徴とするドップラー速度算出方法。
【請求項7】
前記補正ステップでは、前記受信波ベクトルの偏角が、所定の角度範囲内のとなるよう前記受信波ベクトルが補正されることを特徴とする請求項6に記載のドップラー速度算出方法。
【請求項8】
前記時系列で生成される前記同相成分と前記直交成分は、前記受信波ベクトルの各成分を時系列で構成し、
前記補正ステップでは、前記受信波ベクトルの偏角が、時間的に前及び後の受信波ベクトルの偏角の間の角度となるよう前記受信波ベクトルが補正されることを特徴とする請求項6に記載のドップラー速度算出方法。
【請求項9】
前記補正手段ステップでは、前記受信波ベクトルの絶対値が、時間的に前及び後の受信波ベクトルの絶対値の平均値となるよう前記受信波ベクトルが補正されることを特徴とする請求項8に記載のドップラー速度算出方法。
【請求項10】
前記補正ステップは、前記同相成分と前記直交成分の時間平均値が、前記受信波ベクトルの成分となるよう前記受信波ベクトルが補正されることを特徴とする請求項6に記載のドップラー速度算出方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−53028(P2011−53028A)
【公開日】平成23年3月17日(2011.3.17)
【国際特許分類】
【出願番号】特願2009−200861(P2009−200861)
【出願日】平成21年8月31日(2009.8.31)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成23年3月17日(2011.3.17)
【国際特許分類】
【出願日】平成21年8月31日(2009.8.31)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]