
ドライブレコーダシステム、常時記録型ドライブレコーダおよびナビゲーション装置
【課題】長時間撮影を可能にしつつ、適切な記録画質を確保できるドライブレコーダシステム、常時記録型ドライブレコーダおよびナビゲーション装置を提供する。
【解決手段】走行時の経路案内を行うナビゲーション装置20と、走行時の車外の様子を記録する常時記録型ドライブレコーダ31とを備え、ナビゲーション装置20で走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、ドライブレコーダ31の記録画質を変更するようにした。
【解決手段】走行時の経路案内を行うナビゲーション装置20と、走行時の車外の様子を記録する常時記録型ドライブレコーダ31とを備え、ナビゲーション装置20で走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、ドライブレコーダ31の記録画質を変更するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、常時記録型ドライブレコーダの記録画質を制御するドライブレコーダシステム、常時記録型ドライブレコーダおよびナビゲーション装置に関する。
【背景技術】
【0002】
車両に設置されたカメラの撮影画像を記録するドライブレコーダは、当初、各種センサーを用いて事故発生と判断できるタイミングを検出し、その前後の映像記録を行うようにしてきたが、事故発生タイミングの判定が困難で、事故発生時に画像を記録していない場合が生じるおそれがあった。
事故発生時に画像を確実に記録するために、常時記録型のドライブレコーダが注目されている。しかし、常時記録型のドライブレコーダは、常時映像を記録するため、記録媒体の記録容量が直ぐに一杯になりやすい欠点がある。この欠点を補うために、車両の速度が大きいほど撮影画像の圧縮率を小さくする方法や、車両周辺の磁気により車両が異常接近したと判断すると撮影画像のフレームレートを相対的に高速のフレームレートに切り換える方法が提案されている(例えば、特許文献1、2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−124155号公報
【特許文献2】特開2007−88541号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の構成では、事故発生時の撮影画像の圧縮率が大きい場合やフレームレートが低い場合が生じるため、事故発生時の記録装置という観点からは未だ不十分な問題があった。
【0005】
そこで、本発明の目的は、上述した従来の技術が有する課題を解消し、長時間撮影を可能にしつつ、適切な記録画質を確保できるドライブレコーダシステム、常時記録型ドライブレコーダおよびナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明は、ドライブレコーダシステムにおいて、走行時の経路案内を行うナビゲーション装置と、走行時の車外の様子を記録する常時記録型ドライブレコーダとを備え、ナビゲーション装置で走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、前記ドライブレコーダの記録画質を変更する記録画質制御部を備えたことを特徴とする。
この構成によれば、ナビゲーション装置で走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、ドライブレコーダの記録画質を変更する記録画質制御部を備えたので、走行車両前方の道路状況に応じてドライブレコーダの記録画質を変更でき、長時間撮影を可能にしつつ、適切な記録画質を確保できる。
【0007】
この場合、前記道路情報は、道路の分岐点を示すノードと、ノード同士を接続するリンクのデータを有し、前記判定部は、前記ノードとリンクのデータに基づいて走行車両前方の道路状況を判定するようにしてもよい。この構成によれば、既存の道路情報を利用して交差点などの道路状況を精度良く、かつ、リアルタイムで容易に検出することができる。
【0008】
また、本発明は、走行時の車外の様子を記録する常時記録型ドライブレコーダにおいて、走行車両前方の道路状況が所定の状況に至った場合に、記録画質を変更する記録画質変更部を備えたことを特徴とする。この構成によれば、走行車両前方の道路状況が所定の状況に至った場合に、記録画質を変更する記録画質変更部を備えたので、走行車両前方の道路状況に応じてドライブレコーダの記録画質を変更でき、長時間撮影を可能にしつつ、適切な記録画質を確保できる。
【0009】
また、本発明は、走行時の経路案内を行うナビゲーション装置において、走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、走行時の車外の様子を記録する常時記録型ドライブレコーダに、記録画質を変更する信号を出力する出力部を備えたことを特徴とする。この構成によれば、走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、走行時の車外の様子を記録する常時記録型ドライブレコーダに、記録画質を変更する信号を出力する出力部を備えたので、走行車両前方の道路状況に応じてドライブレコーダの記録画質を変更でき、長時間撮影を可能にしつつ、適切な記録画質を確保できる。
【発明の効果】
【0010】
本発明では、ナビゲーション装置で走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、ドライブレコーダの記録画質を変更する記録画質制御部を備えたので、走行車両前方の道路状況に応じてドライブレコーダの記録画質を変更でき、長時間撮影を可能にしつつ、適切な記録画質を確保できる。
【図面の簡単な説明】
【0011】
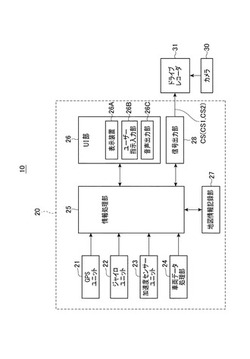
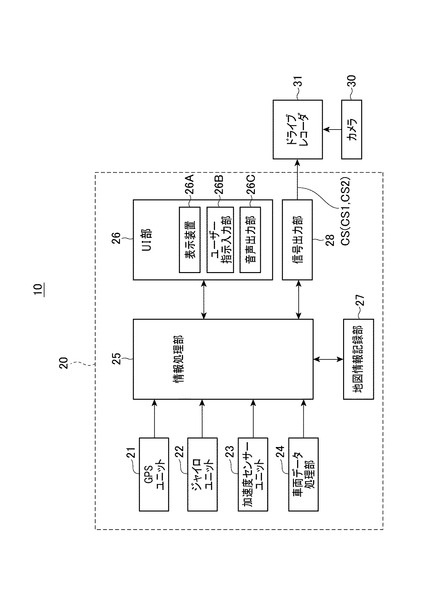
【図1】本発明の実施形態に係るドライブレコーダシステムのナビゲーション装置を詳細に示した図である。
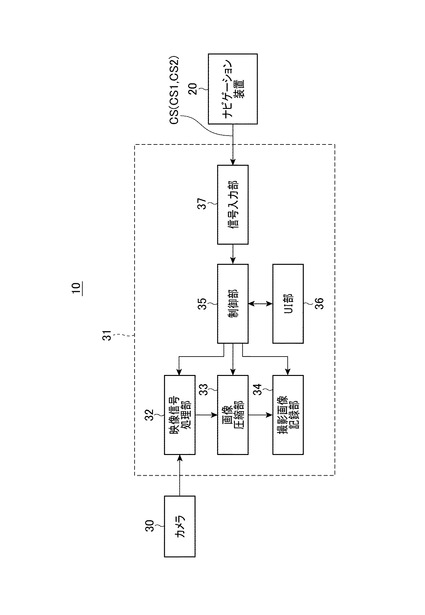
【図2】ドライブレコーダシステムのドライブレコーダを詳細に示した図である。
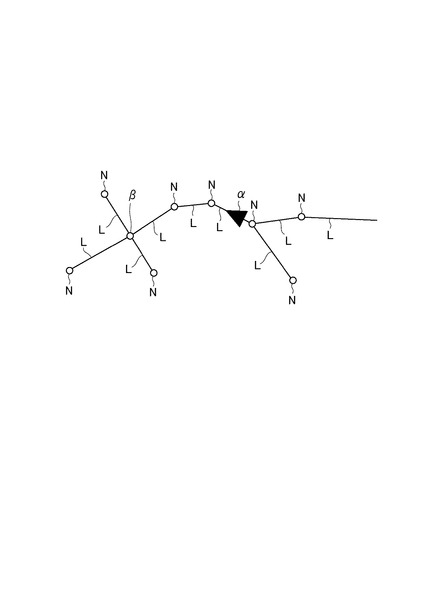
【図3】道路情報の説明に供する図である。
【図4】ドライブレコーダシステムの動作を示すフローチャートである。
【図5】図4の続きのフローチャートである。
【発明を実施するための形態】
【0012】
以下、図面を参照して本発明の一実施の形態について説明する。
図1および図2は、本発明の実施形態に係るドライブレコーダシステムを示す図である。
このドライブレコーダシステム10は、車両(移動体)に搭載されるナビゲーション装置20と、その車両に取り付けられたカメラ(撮影装置)30の撮影画像を記録するドライブレコーダ31とを有している。なお、図1はナビゲーション装置20の構成を主に示し、図2はドライブレコーダ31の構成を主に示している。
図1に示すように、このナビゲーション装置20は、車両の移動情報を取得する機能と、予め記録された道路情報を参照して車両を目的地へと経路案内する機能を具備しており、同図に示すように、GPS(Global Positioning System)ユニット21と、ジャイロユニット22と、加速度センサーユニット23と、車両データ処理部24と、情報処理部25と、ユーザーインターフェース部(以下、UI部という)26と、地図情報記録部27と、信号出力部28とを備えている。
【0013】
GPSユニット21は、GPSアンテナを介してGPS衛星からのGPS電波を受信し、GPS電波に重畳されたGPS信号から、車両の現在地(自車位置)を示す位置座標と進行方向とを演算により取得すると共に、GPS信号に含まれる日時情報と車両の現在地の時差とから車両の現在地における日時情報(年、月、日、時、分など)を演算により取得し、これら情報を情報処理部25に出力する。
ジャイロユニット22は、ジャイロセンサーにより車両の相対的な方位(例えば、ヨー軸方向の旋回量)を検出して情報処理部25に出力する。加速度センサーユニット23は、加速度センサーにより車両の加速度(例えば、進行方向に対する車両の傾き)を検出して情報処理部25に出力する。また、車両データ処理部24は、車両の車速パルスを入力して車速を検出する車速検出部として機能すると共に、車両のバック信号を入力して車両がバック状態(後進状態)であるか否かを検出し、これらの検出結果を情報処理部25に出力する。
【0014】
すなわち、このナビゲーション装置20は、GPSユニット21からの入力データと内蔵した時計の慶事情報とによって当該車両の移動情報(位置、移動方向、速度)を取得可能に構成されており、このGPSユニット21が第1の移動情報取得部として機能する。
また、このナビゲーション装置20は、上述のように、GPSユニット21のデータを用いずに、車両の位置、移動方向、および車速を自立的に算出可能なジャイロユニット22、加速度センサーユニット23及び車両データ処理部(車速検出部)24を備えており、情報処理部25が所定の演算処理を行うことによって、車両の移動情報(位置、移動方向、速度)を自立測位でも取得可能に構成されており、これらが第2の移動情報取得部として機能する。
【0015】
このため、例えばトンネルや地下道を走行するなどしてGPS電波を受信できない場合、或いは、GPS電波がビルなどに反射して検出されるなどのマルチパス環境の場合など、GPSユニットによって検出される移動情報の精度が所定の精度を満たさないときは、上述した第2の移動情報取得部により移動情報を取得できるようになっている。従って、このナビゲーション装置20では、十分な精度を有する移動情報が取得される。
【0016】
情報処理部25は、CPUやメモリー(ROMやRAMやハードディスク装置など)を有するコンピューター構成を有し、このCPUがメモリーに記憶された制御プログラムを実行することによってナビゲーション装置20の各部を制御するコンピューターとして機能する。
また、この情報処理部25は、所定のプログラムを実行することによって、GPSユニット21、ジャイロユニット22、加速度センサーユニット23および車両データ処理部24などから得た情報に基づき車両の移動情報(位置、移動方向、速度)を演算する移動情報演算部として機能すると共に、地図情報記録部27から、現在位置を含む区域の地図データを読み出してマップマッチング処理を行うマップマッチング部としても機能する。
なお、マップマッチング処理は、車両の位置を地図内の道路上に合致させる処理であり、このマップマッチング処理は公知の処理が適用される。
【0017】
UI部26は、各種情報を表示する表示装置26Aと、ユーザー指示を入力するユーザー指示入力部26Bと、経路案内用の音声などを出力する音声出力部26Cとを有している。表示装置26Aは、例えば、液晶表示装置が適用され、情報処理部25の制御の下、車両の位置を地図と共に表示するなどの経路案内用の各種表示を行い、また、現在地から目的地までの経路計算をした際の結果表示などを行う。ユーザー指示入力部26Bは、ナビゲーション装置20に設けられた不図示の各種操作子やタッチパネルの操作を検出する操作検出部や、不図示のリモートコントローラからの送信信号を受信する受信部などから構成され、ユーザーからの各種指示を情報処理部25に出力する。
【0018】
地図情報記録部27は、地図情報(地図データ)を記録する記録部であり、具体的には、CD−ROMやDVD−ROMなどの記録媒体に記憶された地図情報を読み出し可能な読取装置、或いは、ハードディスク装置などが適用される。この地図情報は、車両ナビゲーション用の地図情報であり、いわゆる画像としての地図情報(背景情報とも言う)に加え、道路情報を含んでいる。
この道路情報は、経路案内などに利用される道路データであり、図3に示すように、主に道路形状に対応するノード(点)(図3中、符号Nを付して示す)とリンク(線)(図3中、符号Lを付して示す)とを示すデータで構成されており、ノードは、交差点などの分岐点を示し、リンクは、分岐点をつなぐ道路部分を示している。
なお、図3においては、車両の位置を符号αで示す略三角状の図形で示しており、この三角画像αの最も鋭角の頂点が車体前側を示し、つまり、車両の移動方向を示し、また、2つ以上のリンクがつながるノード、つまり、交差点を符号βで示している。
【0019】
各々のリンクには、リンクを特定するユニークな番号(リンクID)、リンク長、種別(国道、都道府県道・・・)、リンクの道路幅、有料・無料、通行規制などの属性が付与されている。各々のノードには、ノードを特定するユニークな番号(ノードID)、接続するリンク同士の通行規制やレーン情報などの属性が付与されている。また、適切に案内を行うために、各ノードに対応して、その地点で目印となる交差点の名称や、付近に有る施設の記号データ、交差点の画像データなどが格納されている。すなわち、情報処理部25は、この道路情報を参照することによりマップマッチング処理を行い、また、車両の位置から目的地までの経路計算や経路案内などを行う。
【0020】
信号出力部28は、所定の信号線が接続される接続端子を有し、この接続端子に接続された信号線を介してドライブレコーダ31と電気的に接続される。そして、この信号出力部28は、情報処理部25の制御の下、後述する画質制御信号CSをドライブレコーダ31に出力する。この画質制御信号CSは、ドライブレコーダ31に記録画質を指示する信号であり、つまり、情報処理部25は、ドライブレコーダ31に記録画質を指示する記録画質指示部としても機能する。なお、信号出力部28とドライブレコーダ31との間の接続は、有線接続に限らず、無線接続にしてもよい。
【0021】
次に、ドライブレコーダ31について説明する。
図2に示すように、ドライブレコーダ31は、映像信号処理部32と、画像圧縮部33と、撮影画像記録部34と、制御部35と、ユーザーインターフェース部(以下、UI部という)36と、信号入力部37とを備えている。なお、本構成では、説明の便宜上、ドライブレコーダ31をカメラ30と別体の装置として説明しているが、ドライブレコーダ31がカメラ30を備えていてもよい。また、カメラ30も一台に限らず、車両の前、左右、後方などを撮影可能に複数台あってもよい。
映像信号処理部32は、車両の周辺環境の画像(映像)を撮像可能に取り付けられたカメラ30から出力される映像信号をアナログ信号からデジタル信号へと変換(アナログデジタル変換)する処理を行う。
【0022】
画像圧縮部33は、映像信号処理部32でデジタル化された映像信号に圧縮処理を施す。この画像圧縮部33は、圧縮率が異なる高画質モードと低画質モードとで動作可能に構成され、制御部35の制御の下、いずれかの動作モードで圧縮処理を施す。
ここで、高画質モードは、画像のデータ量削減よりも画像の品質を優先した動作モードであり、圧縮率が相対的に低い値、或いは、非圧縮とされる。要は、高画質モードは、事故発生時の記録画像に要求される画質を高レベルで満足可能な撮影画像を得るモードである。
これに対し、低画質モードは、画像の品質よりも画像のデータ量削減を優先した動作モードであり、圧縮率が相対的に高い値とされる。この低画質モードは、事故発生時の記録画像に要求される画質を少なくとも最低限満足する程度の撮影画像を得るモードである。
【0023】
撮影画像記録部34は、画像圧縮部33からの出力画像を記録する記録部であり、ハードディスク装置、CD−ROMやDVD−ROMなどの記録媒体に記録画像を書き込み可能な書込装置などが適用される。
制御部35は、CPUやメモリー(ROMやRAM)を有するコンピューター構成を有し、このCPUがメモリーに記憶された制御プログラムを実行することによってドライブレコーダ31の各部を制御するコンピューターとして機能する。
また、UI部36は、ユーザーがドライブレコーダ31を操作するための操作子を備えている。また、信号入力部37は、所定の信号線が接続される接続端子を有し、この接続端子に接続された信号線を介してナビゲーション装置20と電気的に接続され、ナビゲーション装置20から出力された画質制御信号CSを入力する。すなわち、この信号入力部37は、ナビゲーション装置20の信号出力部28と接続される。
【0024】
ここで、このドライブレコーダシステム10では、ナビゲーション装置20が、ドライブレコーダ31へ記録画質を指示する画質制御信号CSを出力する機能を備え、ドライブレコーダ31は、制御部35の制御の下、ナビゲーション装置20からの画質制御信号CSに基づいて、上記高画質モードでの画像記録(高画質記録という)、または、上記低画質モードでの画像記録(低画質記録という)に変更する機能を具備している。つまり、ナビゲーション装置20は、画質制御信号CSとして、高画質記録を指示する画質制御信号CS1と、低画質記録を指示する画質制御信号CS2とを出力可能に構成されており、ドライブレコーダ31の制御部35は、上記信号CS1、CS2に応じて記録画質を制御する記録画質制御部として機能する。
【0025】
次にこのドライブレコーダシステム10の動作を説明する。図4および図5は、この動作を示すフローチャートである。なお、本構成では、ドライブレコーダ31が常時記録型に構成されている。
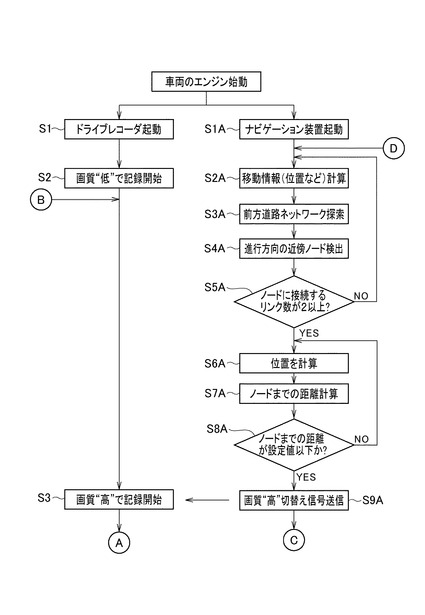
図4に示すように、車両のエンジンが始動すると、車両からドライブレコーダ31とナビゲーション装置20とに電力が供給されるため、ドライブレコーダ31が起動し(ステップS1)、また、ナビゲーション装置20も起動する(ステップS1A)。この場合、カメラ30にも電力が供給され、この電力の供給をトリガにして、或いはドライブレコーダ31からの制御に基づきカメラ30が撮影を開始する。
【0026】
まず、ドライブレコーダ31の起動後の動作を説明する。
ドライブレコーダ31の制御部35は、起動後、画像圧縮部33の動作を低画質モードに設定し、また、ドライブレコーダ31の各部を動作させて、低画質記録で、カメラ30からの撮影画像を撮影画像記録部34に記録開始させる(ステップS2)。つまり、車両始動後、直ぐにドライブレコーダ31は低画質記録を開始する。
そして、ドライブレコーダ31の制御部35は、信号入力部37により外部(ナビゲーション装置20)から高画質記録を指示する画質制御信号CS1(図4中、「画質”高”切替え信号」)を入力した場合には、画像圧縮部33の動作を高画質モードに直ちに切り換え、カメラ30からの撮影画像の高画質記録を開始させる(ステップS3)。
【0027】
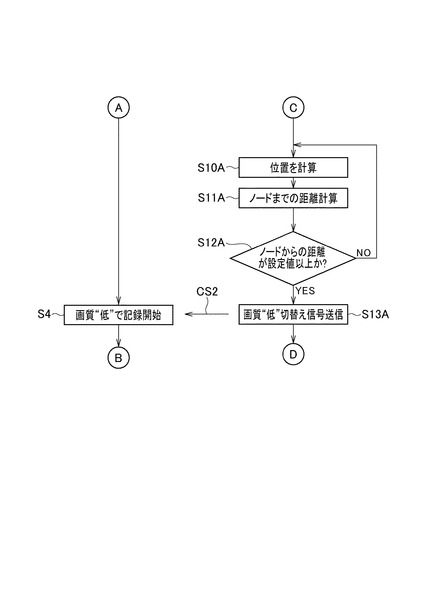
また、図5に示すように、制御部35は、信号入力部37により外部(ナビゲーション装置20)から低画質記録を指示する画質制御信号CS2(図5中、「画質”低”切替え信号」)を入力した場合には、画像圧縮部33の動作を低画質モードに直ちに切り換え、カメラ30からの撮影画像の低画質記録を開始させる(ステップS4)。車両エンジン動作中はこのステップS3、S4の処理を常時実行可能に動作する。なお、ドライブレコーダ31の動作は車両のエンジン停止をトリガにして停止する。以上がドライブレコーダ31の動作である。
【0028】
次にナビゲーション装置20の起動後の動作を説明する。なお、このナビゲーション装置20は、公知のナビゲーション装置が備える経路案内などの各種機能の他、ドライブレコーダ31をコントロールするコントロール機能を具備する。以下の説明では、このコントロール機能に関わる動作だけを説明する。
図4に示すように、ナビゲーション装置20の情報処理部25は、起動後、GPSユニット21などを利用して車両の移動情報(位置、移動方向、速度)を計算により取得する(ステップS2A)。この移動情報の計算は、短い周期で繰り返し実行され、車両の現在位置が略リアルタイムで取得される。
【0029】
次いで、情報処理部25は、地図情報記録部27に記録された地図情報を参照し、取得した移動情報に対する前方道路ネットワークの検索を行う(ステップS3A)。この場合、情報処理部25は、移動情報と道路情報とに基づいて進行方向に位置するノードを検索する。例えば、情報処理部25は、移動情報が示す現在位置に基づいてマップマッチング処理により車両の位置を地図内の道路上に合致させ、移動情報が示す移動方向に基づいて進行方向に位置するノードであって、近傍範囲内にあるノードを検索する。
【0030】
このため、車両の進行方向であって、この車両の位置を基準とした所定の近傍範囲内にノード(分岐点)が地図情報中に存在した場合には、情報処理部25が、そのノードを検出する(ステップS4A)。
そして、情報処理部25は、この検出したノードに接続するリンク数が2以上か否かを判定し(ステップS5A)、リンク数が2未満、つまり、1つの場合は(ステップS5A:N)、ステップS2Aの処理へ移行し、リンク数が2以上の場合に、続くステップS6Aの処理に移行する。すなわち、情報処理部25は、走行車両前方のノードのリンク数に基づいて走行車両前方の道路状況が交差点か否かを判定し、交差点の場合にステップS6Aの処理に移行する。
【0031】
このステップS6Aでは、情報処理部25は、GPSユニット21などを利用して移動情報を計算することにより車両の位置を取得し、続いて、この車両位置からノードまでの距離を計算する(ステップS7A)。なお、この距離計算は、道路情報を用いることによって既存の方法で行われる。
情報処理部25は、ノードまでの距離が予め定めた設定値以下か否かを判定する(ステップS8A)。この判定処理は、車両が交差点手前に移動したか否かを判定するものであり、設定値は、例えば、数メートルから数十メートル程度の値が適用される。また、設定値以下になるまでステップS6A〜S8Aの処理が繰り返される。これによって、車両が交差点手前に移動したか否かを継続的に監視できる。
【0032】
情報処理部25は、ノードまでの距離が設定値以下になると(ステップS8:Y)、信号出力部28により高画質記録を指示する画質制御信号CS1(図4中、「画質”高”切替え信号」)を出力する(ステップS9A)。これによって、車両が交差点手前まで移動すると、ドライブレコーダ31が高画質記録に切り換えられる。
図5に示すように、情報処理部25は、上述と同様の位置計算により車両の位置を取得し(ステップS10A)、ノードまでの距離が予め定めた設定値以上か否かを判定する(ステップS11A)。この判定処理は、車両が交差点を通過したか否かを判定するものであり、設定値は、例えば、数メートルから数十メートル程度の値が適用される。
【0033】
そして、情報処理部25は、ノードまでの距離が設定値以上になると(ステップS12:Y)、信号出力部28により低画質記録を指示する画質制御信号CS2(図5中、「画質”低”切替え信号」)を送信する(ステップS13A)。これによって、車両が交差点を通過した後、ドライブレコーダ31が低画質記録に切り換えられる。このステップS2A〜ステップS13Aまでの処理は、車両エンジン動作中に繰り返し実行される。なお、ナビゲーション装置20の動作についても、車両のエンジン停止をトリガにして停止する。以上がナビゲーション装置20のドライブレコーダ31に関わる動作である。
【0034】
以上説明したように、本実施形態では、ナビゲーション装置20で走行車両前方の道路状況を判定し、道路状況が交差点に至った場合に、ドライブレコーダ31を低画質記録から高画質記録に変更するので、交差点の手前で確実に高画質記録を開始できる。また、ナビゲーション装置20で走行車両が交差点を通過したか否かを判定し、交差点を通過した場合に、ドライブレコーダ31を高画質記録から低画質記録に変更するので、交差点通過後は低画質記録に戻すことができる。
ここで、ドライブレコーダ31は、事故発生時の記録装置であるため、事故が発生し易いポイントで十分な記録画質が確保されること、および、そのポイントに到達する前から最適な画質で録画されていることが望まれる。多くの事故が発生する場所とは、交差点などの分岐点(合流点も含む)である。これらの場所は撮影の観点から見ると、多くのものが写り込んでおり、高画質で撮影されていないと事故発生時の記録として不十分な可能性が高い。一方、直線道路又は分岐のない単調な道路は見通しが良いため、それほど高画質で録画しなくても良いと考えられる。
【0035】
上述のように本実施形態では、ドライブレコーダ31をナビゲーション装置20と連係して記録画質を変更可能に構成し、ナビゲーション10の機能を利用して交差点の手前および通過を判定して交差点の手前でドライブレコーダ31を高画質記録に切り換え、交差点通過後にドライブレコーダ31を低画質記録に切り換えるので、低画質記録を行って記憶容量を抑えつつ交差点で高画質記録を行うことが可能なドライブレコーダシステムを簡易に構築することができる。これによって、効率よく長時間撮影を可能にし、かつ、交差点での記録画質を十分に確保できる。
【0036】
しかも、ナビゲーション装置20は、このナビゲーション装置20が経路案内などに使用する通常の道路情報に記述されるノードとリンクのデータに基づいて交差点に相当する道路状況か否かを判定するので、既存の道路情報を利用して交差点などを精度良く、かつ、リアルタイムで容易に検出することができる。
また、車両と交差点との間の距離が所定の距離となった場合に、画質制御信号CSを出力するので、ナビゲーション装置20の既存の距離計測機能を利用して交差点の前後のタイミングで画質制御信号CSを出力することができる。
【0037】
上述した実施形態は、あくまで本発明の一態様に過ぎず、本発明の範囲内で任意に変形が可能である。
例えば、上述の実施形態では、進行先にある1つ先のノードを検索する場合について説明したが、1つ先のノードの検索では走行速度が速いと間に合わない事態が想定される場合には、進行先にある複数のノードを検索するように構成してもよい。
【0038】
また、上述の実施形態では、交差点に相当する道路状況の場合に高画質記録を行う場合に説明したが、これに限らず、要は、高画質記録に適した道路状況の場合に高画質記録を行うように構成すればよい。例えば、高速道路の分岐点或いは合流点の場合に高画質記録を行うようにしてもよいし、急カーブなどの見通しが悪い地点の場合に高画質記録を行うようにしてもよい。この場合、例えば、高速道路の分岐点或いは合流点か否かは、既存の道路情報に含まれる高速道路特定データ(リンクデータに含まれる道路種別のデータ等)をさらに参照することによって判定すればよい。また、急カーブか否かの判定は、リンクのなす角度が鋭角か否かを判定し、鋭角の地点を急カーブと判定すればよい。
【0039】
また、上述の実施形態では、車両用のドライブレコーダシステムに本発明を適用する場合を説明したが、これに限らず、車両以外で道路を走行する移動体用のドライブレコーダシステムに適用してもおい。なお、車両は、自動車に限らず、自動二輪車や自転車などを含む広義の車両を意味する。
また、上述の実施形態では、上記処理を行うための制御プログラムを予め装置内に記録しておく場合について述べたが、この制御プログラムを、磁気記録媒体、光記録媒体、半導体記録媒体等のコンピューターが読み取り可能な記録媒体に格納し、コンピューターが記録媒体からこの制御プログラムを読み取って実行するようにしてもよい。また、この制御プログラムを通信ネットワーク(電気通信回線)を介して配信サーバー等からダウンロードできるようにしてもよい。
【符号の説明】
【0040】
10 ドライブレコーダシステム
20 ナビゲーション装置
21 GPSユニット(移動情報取得部)
22 ジャイロユニット(移動情報取得部)
23 加速度センサーユニット(移動情報取得部)
24 車両データ処理部(移動情報取得部)
25 情報処理部(記録画質指示部)
27 地図情報記録部
28 信号出力部(出力部)
30 カメラ(撮影装置)
31 ドライブレコーダ
32 映像信号処理部
33 画像圧縮部
34 撮影画像記録部
35 制御部(記録画質制御部)
【技術分野】
【0001】
本発明は、常時記録型ドライブレコーダの記録画質を制御するドライブレコーダシステム、常時記録型ドライブレコーダおよびナビゲーション装置に関する。
【背景技術】
【0002】
車両に設置されたカメラの撮影画像を記録するドライブレコーダは、当初、各種センサーを用いて事故発生と判断できるタイミングを検出し、その前後の映像記録を行うようにしてきたが、事故発生タイミングの判定が困難で、事故発生時に画像を記録していない場合が生じるおそれがあった。
事故発生時に画像を確実に記録するために、常時記録型のドライブレコーダが注目されている。しかし、常時記録型のドライブレコーダは、常時映像を記録するため、記録媒体の記録容量が直ぐに一杯になりやすい欠点がある。この欠点を補うために、車両の速度が大きいほど撮影画像の圧縮率を小さくする方法や、車両周辺の磁気により車両が異常接近したと判断すると撮影画像のフレームレートを相対的に高速のフレームレートに切り換える方法が提案されている(例えば、特許文献1、2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−124155号公報
【特許文献2】特開2007−88541号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の構成では、事故発生時の撮影画像の圧縮率が大きい場合やフレームレートが低い場合が生じるため、事故発生時の記録装置という観点からは未だ不十分な問題があった。
【0005】
そこで、本発明の目的は、上述した従来の技術が有する課題を解消し、長時間撮影を可能にしつつ、適切な記録画質を確保できるドライブレコーダシステム、常時記録型ドライブレコーダおよびナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明は、ドライブレコーダシステムにおいて、走行時の経路案内を行うナビゲーション装置と、走行時の車外の様子を記録する常時記録型ドライブレコーダとを備え、ナビゲーション装置で走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、前記ドライブレコーダの記録画質を変更する記録画質制御部を備えたことを特徴とする。
この構成によれば、ナビゲーション装置で走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、ドライブレコーダの記録画質を変更する記録画質制御部を備えたので、走行車両前方の道路状況に応じてドライブレコーダの記録画質を変更でき、長時間撮影を可能にしつつ、適切な記録画質を確保できる。
【0007】
この場合、前記道路情報は、道路の分岐点を示すノードと、ノード同士を接続するリンクのデータを有し、前記判定部は、前記ノードとリンクのデータに基づいて走行車両前方の道路状況を判定するようにしてもよい。この構成によれば、既存の道路情報を利用して交差点などの道路状況を精度良く、かつ、リアルタイムで容易に検出することができる。
【0008】
また、本発明は、走行時の車外の様子を記録する常時記録型ドライブレコーダにおいて、走行車両前方の道路状況が所定の状況に至った場合に、記録画質を変更する記録画質変更部を備えたことを特徴とする。この構成によれば、走行車両前方の道路状況が所定の状況に至った場合に、記録画質を変更する記録画質変更部を備えたので、走行車両前方の道路状況に応じてドライブレコーダの記録画質を変更でき、長時間撮影を可能にしつつ、適切な記録画質を確保できる。
【0009】
また、本発明は、走行時の経路案内を行うナビゲーション装置において、走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、走行時の車外の様子を記録する常時記録型ドライブレコーダに、記録画質を変更する信号を出力する出力部を備えたことを特徴とする。この構成によれば、走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、走行時の車外の様子を記録する常時記録型ドライブレコーダに、記録画質を変更する信号を出力する出力部を備えたので、走行車両前方の道路状況に応じてドライブレコーダの記録画質を変更でき、長時間撮影を可能にしつつ、適切な記録画質を確保できる。
【発明の効果】
【0010】
本発明では、ナビゲーション装置で走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、ドライブレコーダの記録画質を変更する記録画質制御部を備えたので、走行車両前方の道路状況に応じてドライブレコーダの記録画質を変更でき、長時間撮影を可能にしつつ、適切な記録画質を確保できる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態に係るドライブレコーダシステムのナビゲーション装置を詳細に示した図である。
【図2】ドライブレコーダシステムのドライブレコーダを詳細に示した図である。
【図3】道路情報の説明に供する図である。
【図4】ドライブレコーダシステムの動作を示すフローチャートである。
【図5】図4の続きのフローチャートである。
【発明を実施するための形態】
【0012】
以下、図面を参照して本発明の一実施の形態について説明する。
図1および図2は、本発明の実施形態に係るドライブレコーダシステムを示す図である。
このドライブレコーダシステム10は、車両(移動体)に搭載されるナビゲーション装置20と、その車両に取り付けられたカメラ(撮影装置)30の撮影画像を記録するドライブレコーダ31とを有している。なお、図1はナビゲーション装置20の構成を主に示し、図2はドライブレコーダ31の構成を主に示している。
図1に示すように、このナビゲーション装置20は、車両の移動情報を取得する機能と、予め記録された道路情報を参照して車両を目的地へと経路案内する機能を具備しており、同図に示すように、GPS(Global Positioning System)ユニット21と、ジャイロユニット22と、加速度センサーユニット23と、車両データ処理部24と、情報処理部25と、ユーザーインターフェース部(以下、UI部という)26と、地図情報記録部27と、信号出力部28とを備えている。
【0013】
GPSユニット21は、GPSアンテナを介してGPS衛星からのGPS電波を受信し、GPS電波に重畳されたGPS信号から、車両の現在地(自車位置)を示す位置座標と進行方向とを演算により取得すると共に、GPS信号に含まれる日時情報と車両の現在地の時差とから車両の現在地における日時情報(年、月、日、時、分など)を演算により取得し、これら情報を情報処理部25に出力する。
ジャイロユニット22は、ジャイロセンサーにより車両の相対的な方位(例えば、ヨー軸方向の旋回量)を検出して情報処理部25に出力する。加速度センサーユニット23は、加速度センサーにより車両の加速度(例えば、進行方向に対する車両の傾き)を検出して情報処理部25に出力する。また、車両データ処理部24は、車両の車速パルスを入力して車速を検出する車速検出部として機能すると共に、車両のバック信号を入力して車両がバック状態(後進状態)であるか否かを検出し、これらの検出結果を情報処理部25に出力する。
【0014】
すなわち、このナビゲーション装置20は、GPSユニット21からの入力データと内蔵した時計の慶事情報とによって当該車両の移動情報(位置、移動方向、速度)を取得可能に構成されており、このGPSユニット21が第1の移動情報取得部として機能する。
また、このナビゲーション装置20は、上述のように、GPSユニット21のデータを用いずに、車両の位置、移動方向、および車速を自立的に算出可能なジャイロユニット22、加速度センサーユニット23及び車両データ処理部(車速検出部)24を備えており、情報処理部25が所定の演算処理を行うことによって、車両の移動情報(位置、移動方向、速度)を自立測位でも取得可能に構成されており、これらが第2の移動情報取得部として機能する。
【0015】
このため、例えばトンネルや地下道を走行するなどしてGPS電波を受信できない場合、或いは、GPS電波がビルなどに反射して検出されるなどのマルチパス環境の場合など、GPSユニットによって検出される移動情報の精度が所定の精度を満たさないときは、上述した第2の移動情報取得部により移動情報を取得できるようになっている。従って、このナビゲーション装置20では、十分な精度を有する移動情報が取得される。
【0016】
情報処理部25は、CPUやメモリー(ROMやRAMやハードディスク装置など)を有するコンピューター構成を有し、このCPUがメモリーに記憶された制御プログラムを実行することによってナビゲーション装置20の各部を制御するコンピューターとして機能する。
また、この情報処理部25は、所定のプログラムを実行することによって、GPSユニット21、ジャイロユニット22、加速度センサーユニット23および車両データ処理部24などから得た情報に基づき車両の移動情報(位置、移動方向、速度)を演算する移動情報演算部として機能すると共に、地図情報記録部27から、現在位置を含む区域の地図データを読み出してマップマッチング処理を行うマップマッチング部としても機能する。
なお、マップマッチング処理は、車両の位置を地図内の道路上に合致させる処理であり、このマップマッチング処理は公知の処理が適用される。
【0017】
UI部26は、各種情報を表示する表示装置26Aと、ユーザー指示を入力するユーザー指示入力部26Bと、経路案内用の音声などを出力する音声出力部26Cとを有している。表示装置26Aは、例えば、液晶表示装置が適用され、情報処理部25の制御の下、車両の位置を地図と共に表示するなどの経路案内用の各種表示を行い、また、現在地から目的地までの経路計算をした際の結果表示などを行う。ユーザー指示入力部26Bは、ナビゲーション装置20に設けられた不図示の各種操作子やタッチパネルの操作を検出する操作検出部や、不図示のリモートコントローラからの送信信号を受信する受信部などから構成され、ユーザーからの各種指示を情報処理部25に出力する。
【0018】
地図情報記録部27は、地図情報(地図データ)を記録する記録部であり、具体的には、CD−ROMやDVD−ROMなどの記録媒体に記憶された地図情報を読み出し可能な読取装置、或いは、ハードディスク装置などが適用される。この地図情報は、車両ナビゲーション用の地図情報であり、いわゆる画像としての地図情報(背景情報とも言う)に加え、道路情報を含んでいる。
この道路情報は、経路案内などに利用される道路データであり、図3に示すように、主に道路形状に対応するノード(点)(図3中、符号Nを付して示す)とリンク(線)(図3中、符号Lを付して示す)とを示すデータで構成されており、ノードは、交差点などの分岐点を示し、リンクは、分岐点をつなぐ道路部分を示している。
なお、図3においては、車両の位置を符号αで示す略三角状の図形で示しており、この三角画像αの最も鋭角の頂点が車体前側を示し、つまり、車両の移動方向を示し、また、2つ以上のリンクがつながるノード、つまり、交差点を符号βで示している。
【0019】
各々のリンクには、リンクを特定するユニークな番号(リンクID)、リンク長、種別(国道、都道府県道・・・)、リンクの道路幅、有料・無料、通行規制などの属性が付与されている。各々のノードには、ノードを特定するユニークな番号(ノードID)、接続するリンク同士の通行規制やレーン情報などの属性が付与されている。また、適切に案内を行うために、各ノードに対応して、その地点で目印となる交差点の名称や、付近に有る施設の記号データ、交差点の画像データなどが格納されている。すなわち、情報処理部25は、この道路情報を参照することによりマップマッチング処理を行い、また、車両の位置から目的地までの経路計算や経路案内などを行う。
【0020】
信号出力部28は、所定の信号線が接続される接続端子を有し、この接続端子に接続された信号線を介してドライブレコーダ31と電気的に接続される。そして、この信号出力部28は、情報処理部25の制御の下、後述する画質制御信号CSをドライブレコーダ31に出力する。この画質制御信号CSは、ドライブレコーダ31に記録画質を指示する信号であり、つまり、情報処理部25は、ドライブレコーダ31に記録画質を指示する記録画質指示部としても機能する。なお、信号出力部28とドライブレコーダ31との間の接続は、有線接続に限らず、無線接続にしてもよい。
【0021】
次に、ドライブレコーダ31について説明する。
図2に示すように、ドライブレコーダ31は、映像信号処理部32と、画像圧縮部33と、撮影画像記録部34と、制御部35と、ユーザーインターフェース部(以下、UI部という)36と、信号入力部37とを備えている。なお、本構成では、説明の便宜上、ドライブレコーダ31をカメラ30と別体の装置として説明しているが、ドライブレコーダ31がカメラ30を備えていてもよい。また、カメラ30も一台に限らず、車両の前、左右、後方などを撮影可能に複数台あってもよい。
映像信号処理部32は、車両の周辺環境の画像(映像)を撮像可能に取り付けられたカメラ30から出力される映像信号をアナログ信号からデジタル信号へと変換(アナログデジタル変換)する処理を行う。
【0022】
画像圧縮部33は、映像信号処理部32でデジタル化された映像信号に圧縮処理を施す。この画像圧縮部33は、圧縮率が異なる高画質モードと低画質モードとで動作可能に構成され、制御部35の制御の下、いずれかの動作モードで圧縮処理を施す。
ここで、高画質モードは、画像のデータ量削減よりも画像の品質を優先した動作モードであり、圧縮率が相対的に低い値、或いは、非圧縮とされる。要は、高画質モードは、事故発生時の記録画像に要求される画質を高レベルで満足可能な撮影画像を得るモードである。
これに対し、低画質モードは、画像の品質よりも画像のデータ量削減を優先した動作モードであり、圧縮率が相対的に高い値とされる。この低画質モードは、事故発生時の記録画像に要求される画質を少なくとも最低限満足する程度の撮影画像を得るモードである。
【0023】
撮影画像記録部34は、画像圧縮部33からの出力画像を記録する記録部であり、ハードディスク装置、CD−ROMやDVD−ROMなどの記録媒体に記録画像を書き込み可能な書込装置などが適用される。
制御部35は、CPUやメモリー(ROMやRAM)を有するコンピューター構成を有し、このCPUがメモリーに記憶された制御プログラムを実行することによってドライブレコーダ31の各部を制御するコンピューターとして機能する。
また、UI部36は、ユーザーがドライブレコーダ31を操作するための操作子を備えている。また、信号入力部37は、所定の信号線が接続される接続端子を有し、この接続端子に接続された信号線を介してナビゲーション装置20と電気的に接続され、ナビゲーション装置20から出力された画質制御信号CSを入力する。すなわち、この信号入力部37は、ナビゲーション装置20の信号出力部28と接続される。
【0024】
ここで、このドライブレコーダシステム10では、ナビゲーション装置20が、ドライブレコーダ31へ記録画質を指示する画質制御信号CSを出力する機能を備え、ドライブレコーダ31は、制御部35の制御の下、ナビゲーション装置20からの画質制御信号CSに基づいて、上記高画質モードでの画像記録(高画質記録という)、または、上記低画質モードでの画像記録(低画質記録という)に変更する機能を具備している。つまり、ナビゲーション装置20は、画質制御信号CSとして、高画質記録を指示する画質制御信号CS1と、低画質記録を指示する画質制御信号CS2とを出力可能に構成されており、ドライブレコーダ31の制御部35は、上記信号CS1、CS2に応じて記録画質を制御する記録画質制御部として機能する。
【0025】
次にこのドライブレコーダシステム10の動作を説明する。図4および図5は、この動作を示すフローチャートである。なお、本構成では、ドライブレコーダ31が常時記録型に構成されている。
図4に示すように、車両のエンジンが始動すると、車両からドライブレコーダ31とナビゲーション装置20とに電力が供給されるため、ドライブレコーダ31が起動し(ステップS1)、また、ナビゲーション装置20も起動する(ステップS1A)。この場合、カメラ30にも電力が供給され、この電力の供給をトリガにして、或いはドライブレコーダ31からの制御に基づきカメラ30が撮影を開始する。
【0026】
まず、ドライブレコーダ31の起動後の動作を説明する。
ドライブレコーダ31の制御部35は、起動後、画像圧縮部33の動作を低画質モードに設定し、また、ドライブレコーダ31の各部を動作させて、低画質記録で、カメラ30からの撮影画像を撮影画像記録部34に記録開始させる(ステップS2)。つまり、車両始動後、直ぐにドライブレコーダ31は低画質記録を開始する。
そして、ドライブレコーダ31の制御部35は、信号入力部37により外部(ナビゲーション装置20)から高画質記録を指示する画質制御信号CS1(図4中、「画質”高”切替え信号」)を入力した場合には、画像圧縮部33の動作を高画質モードに直ちに切り換え、カメラ30からの撮影画像の高画質記録を開始させる(ステップS3)。
【0027】
また、図5に示すように、制御部35は、信号入力部37により外部(ナビゲーション装置20)から低画質記録を指示する画質制御信号CS2(図5中、「画質”低”切替え信号」)を入力した場合には、画像圧縮部33の動作を低画質モードに直ちに切り換え、カメラ30からの撮影画像の低画質記録を開始させる(ステップS4)。車両エンジン動作中はこのステップS3、S4の処理を常時実行可能に動作する。なお、ドライブレコーダ31の動作は車両のエンジン停止をトリガにして停止する。以上がドライブレコーダ31の動作である。
【0028】
次にナビゲーション装置20の起動後の動作を説明する。なお、このナビゲーション装置20は、公知のナビゲーション装置が備える経路案内などの各種機能の他、ドライブレコーダ31をコントロールするコントロール機能を具備する。以下の説明では、このコントロール機能に関わる動作だけを説明する。
図4に示すように、ナビゲーション装置20の情報処理部25は、起動後、GPSユニット21などを利用して車両の移動情報(位置、移動方向、速度)を計算により取得する(ステップS2A)。この移動情報の計算は、短い周期で繰り返し実行され、車両の現在位置が略リアルタイムで取得される。
【0029】
次いで、情報処理部25は、地図情報記録部27に記録された地図情報を参照し、取得した移動情報に対する前方道路ネットワークの検索を行う(ステップS3A)。この場合、情報処理部25は、移動情報と道路情報とに基づいて進行方向に位置するノードを検索する。例えば、情報処理部25は、移動情報が示す現在位置に基づいてマップマッチング処理により車両の位置を地図内の道路上に合致させ、移動情報が示す移動方向に基づいて進行方向に位置するノードであって、近傍範囲内にあるノードを検索する。
【0030】
このため、車両の進行方向であって、この車両の位置を基準とした所定の近傍範囲内にノード(分岐点)が地図情報中に存在した場合には、情報処理部25が、そのノードを検出する(ステップS4A)。
そして、情報処理部25は、この検出したノードに接続するリンク数が2以上か否かを判定し(ステップS5A)、リンク数が2未満、つまり、1つの場合は(ステップS5A:N)、ステップS2Aの処理へ移行し、リンク数が2以上の場合に、続くステップS6Aの処理に移行する。すなわち、情報処理部25は、走行車両前方のノードのリンク数に基づいて走行車両前方の道路状況が交差点か否かを判定し、交差点の場合にステップS6Aの処理に移行する。
【0031】
このステップS6Aでは、情報処理部25は、GPSユニット21などを利用して移動情報を計算することにより車両の位置を取得し、続いて、この車両位置からノードまでの距離を計算する(ステップS7A)。なお、この距離計算は、道路情報を用いることによって既存の方法で行われる。
情報処理部25は、ノードまでの距離が予め定めた設定値以下か否かを判定する(ステップS8A)。この判定処理は、車両が交差点手前に移動したか否かを判定するものであり、設定値は、例えば、数メートルから数十メートル程度の値が適用される。また、設定値以下になるまでステップS6A〜S8Aの処理が繰り返される。これによって、車両が交差点手前に移動したか否かを継続的に監視できる。
【0032】
情報処理部25は、ノードまでの距離が設定値以下になると(ステップS8:Y)、信号出力部28により高画質記録を指示する画質制御信号CS1(図4中、「画質”高”切替え信号」)を出力する(ステップS9A)。これによって、車両が交差点手前まで移動すると、ドライブレコーダ31が高画質記録に切り換えられる。
図5に示すように、情報処理部25は、上述と同様の位置計算により車両の位置を取得し(ステップS10A)、ノードまでの距離が予め定めた設定値以上か否かを判定する(ステップS11A)。この判定処理は、車両が交差点を通過したか否かを判定するものであり、設定値は、例えば、数メートルから数十メートル程度の値が適用される。
【0033】
そして、情報処理部25は、ノードまでの距離が設定値以上になると(ステップS12:Y)、信号出力部28により低画質記録を指示する画質制御信号CS2(図5中、「画質”低”切替え信号」)を送信する(ステップS13A)。これによって、車両が交差点を通過した後、ドライブレコーダ31が低画質記録に切り換えられる。このステップS2A〜ステップS13Aまでの処理は、車両エンジン動作中に繰り返し実行される。なお、ナビゲーション装置20の動作についても、車両のエンジン停止をトリガにして停止する。以上がナビゲーション装置20のドライブレコーダ31に関わる動作である。
【0034】
以上説明したように、本実施形態では、ナビゲーション装置20で走行車両前方の道路状況を判定し、道路状況が交差点に至った場合に、ドライブレコーダ31を低画質記録から高画質記録に変更するので、交差点の手前で確実に高画質記録を開始できる。また、ナビゲーション装置20で走行車両が交差点を通過したか否かを判定し、交差点を通過した場合に、ドライブレコーダ31を高画質記録から低画質記録に変更するので、交差点通過後は低画質記録に戻すことができる。
ここで、ドライブレコーダ31は、事故発生時の記録装置であるため、事故が発生し易いポイントで十分な記録画質が確保されること、および、そのポイントに到達する前から最適な画質で録画されていることが望まれる。多くの事故が発生する場所とは、交差点などの分岐点(合流点も含む)である。これらの場所は撮影の観点から見ると、多くのものが写り込んでおり、高画質で撮影されていないと事故発生時の記録として不十分な可能性が高い。一方、直線道路又は分岐のない単調な道路は見通しが良いため、それほど高画質で録画しなくても良いと考えられる。
【0035】
上述のように本実施形態では、ドライブレコーダ31をナビゲーション装置20と連係して記録画質を変更可能に構成し、ナビゲーション10の機能を利用して交差点の手前および通過を判定して交差点の手前でドライブレコーダ31を高画質記録に切り換え、交差点通過後にドライブレコーダ31を低画質記録に切り換えるので、低画質記録を行って記憶容量を抑えつつ交差点で高画質記録を行うことが可能なドライブレコーダシステムを簡易に構築することができる。これによって、効率よく長時間撮影を可能にし、かつ、交差点での記録画質を十分に確保できる。
【0036】
しかも、ナビゲーション装置20は、このナビゲーション装置20が経路案内などに使用する通常の道路情報に記述されるノードとリンクのデータに基づいて交差点に相当する道路状況か否かを判定するので、既存の道路情報を利用して交差点などを精度良く、かつ、リアルタイムで容易に検出することができる。
また、車両と交差点との間の距離が所定の距離となった場合に、画質制御信号CSを出力するので、ナビゲーション装置20の既存の距離計測機能を利用して交差点の前後のタイミングで画質制御信号CSを出力することができる。
【0037】
上述した実施形態は、あくまで本発明の一態様に過ぎず、本発明の範囲内で任意に変形が可能である。
例えば、上述の実施形態では、進行先にある1つ先のノードを検索する場合について説明したが、1つ先のノードの検索では走行速度が速いと間に合わない事態が想定される場合には、進行先にある複数のノードを検索するように構成してもよい。
【0038】
また、上述の実施形態では、交差点に相当する道路状況の場合に高画質記録を行う場合に説明したが、これに限らず、要は、高画質記録に適した道路状況の場合に高画質記録を行うように構成すればよい。例えば、高速道路の分岐点或いは合流点の場合に高画質記録を行うようにしてもよいし、急カーブなどの見通しが悪い地点の場合に高画質記録を行うようにしてもよい。この場合、例えば、高速道路の分岐点或いは合流点か否かは、既存の道路情報に含まれる高速道路特定データ(リンクデータに含まれる道路種別のデータ等)をさらに参照することによって判定すればよい。また、急カーブか否かの判定は、リンクのなす角度が鋭角か否かを判定し、鋭角の地点を急カーブと判定すればよい。
【0039】
また、上述の実施形態では、車両用のドライブレコーダシステムに本発明を適用する場合を説明したが、これに限らず、車両以外で道路を走行する移動体用のドライブレコーダシステムに適用してもおい。なお、車両は、自動車に限らず、自動二輪車や自転車などを含む広義の車両を意味する。
また、上述の実施形態では、上記処理を行うための制御プログラムを予め装置内に記録しておく場合について述べたが、この制御プログラムを、磁気記録媒体、光記録媒体、半導体記録媒体等のコンピューターが読み取り可能な記録媒体に格納し、コンピューターが記録媒体からこの制御プログラムを読み取って実行するようにしてもよい。また、この制御プログラムを通信ネットワーク(電気通信回線)を介して配信サーバー等からダウンロードできるようにしてもよい。
【符号の説明】
【0040】
10 ドライブレコーダシステム
20 ナビゲーション装置
21 GPSユニット(移動情報取得部)
22 ジャイロユニット(移動情報取得部)
23 加速度センサーユニット(移動情報取得部)
24 車両データ処理部(移動情報取得部)
25 情報処理部(記録画質指示部)
27 地図情報記録部
28 信号出力部(出力部)
30 カメラ(撮影装置)
31 ドライブレコーダ
32 映像信号処理部
33 画像圧縮部
34 撮影画像記録部
35 制御部(記録画質制御部)
【特許請求の範囲】
【請求項1】
走行時の経路案内を行うナビゲーション装置と、走行時の車外の様子を記録する常時記録型ドライブレコーダとを備え、ナビゲーション装置で走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、前記ドライブレコーダの記録画質を変更する記録画質制御部を備えたことを特徴とするドライブレコーダシステム。
【請求項2】
走行時の車外の様子を記録する常時記録型ドライブレコーダにおいて、
走行車両前方の道路状況が所定の状況に至った場合に、記録画質を変更する記録画質制御部を備えたことを特徴とする常時記録型ドライブレコーダ。
【請求項3】
走行時の経路案内を行うナビゲーション装置において、
走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、走行時の車外の様子を記録する常時記録型ドライブレコーダに、記録画質を変更する信号を出力する出力部を備えたことを特徴とするナビゲーション装置。
【請求項1】
走行時の経路案内を行うナビゲーション装置と、走行時の車外の様子を記録する常時記録型ドライブレコーダとを備え、ナビゲーション装置で走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、前記ドライブレコーダの記録画質を変更する記録画質制御部を備えたことを特徴とするドライブレコーダシステム。
【請求項2】
走行時の車外の様子を記録する常時記録型ドライブレコーダにおいて、
走行車両前方の道路状況が所定の状況に至った場合に、記録画質を変更する記録画質制御部を備えたことを特徴とする常時記録型ドライブレコーダ。
【請求項3】
走行時の経路案内を行うナビゲーション装置において、
走行車両前方の道路状況を判定し、道路状況が所定の状況に至った場合に、走行時の車外の様子を記録する常時記録型ドライブレコーダに、記録画質を変更する信号を出力する出力部を備えたことを特徴とするナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−286944(P2010−286944A)
【公開日】平成22年12月24日(2010.12.24)
【国際特許分類】
【出願番号】特願2009−138813(P2009−138813)
【出願日】平成21年6月10日(2009.6.10)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成22年12月24日(2010.12.24)
【国際特許分類】
【出願日】平成21年6月10日(2009.6.10)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]