
ドライブレコーダ
【課題】車両のふらつき走行を一定の精度で検出できるとともに、高精度且つ高速に検出できるドライブレコーダを提供する。
【解決手段】ドライブレコーダは、車両が走行する車線内における前記車両の走行位置を周期的に検出する走行位置検出手段21bと、走行位置検出手段21bによって検出された最新の走行位置とその直前の走行位置との変化量を算出する変化量算出手段21cと、変化量算出手段21cによって算出された前記変化量が予め設定されたふらつき走行判定閾値を超えたときに前記車両のふらつき走行を検出するふらつき走行検出手段21cと、前記ふらつき走行検出手段21cによって前記車両のふらつき走行が検出されたとき、前記最新の走行位置を検出した直前に車両状況情報検出手段21aによって検出された前記車両状況情報を記憶媒体Cに記録する車両状況情報記録手段21eと、を備えている。
【解決手段】ドライブレコーダは、車両が走行する車線内における前記車両の走行位置を周期的に検出する走行位置検出手段21bと、走行位置検出手段21bによって検出された最新の走行位置とその直前の走行位置との変化量を算出する変化量算出手段21cと、変化量算出手段21cによって算出された前記変化量が予め設定されたふらつき走行判定閾値を超えたときに前記車両のふらつき走行を検出するふらつき走行検出手段21cと、前記ふらつき走行検出手段21cによって前記車両のふらつき走行が検出されたとき、前記最新の走行位置を検出した直前に車両状況情報検出手段21aによって検出された前記車両状況情報を記憶媒体Cに記録する車両状況情報記録手段21eと、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ドライブレコーダに関し、より詳細には、車両への衝撃の発生など所定の記録条件に基づいて、車両状況を示す車両状況情報を記憶媒体に記録するドライブレコーダに関する。
【背景技術】
【0002】
近年では、自動車事故を未然に防止する有効な手段になり得るものとして、事故発生時の前後の車両状況情報(前方映像、車両速度、急加減速など)を記録するドライブレコーダの運送事業者への導入が進んでいる。そして、例えば、タクシー、バス等の営業用車両に搭載されるドライブレコーダは、事故時及び急制動時等の前方映像とドライバーの運転操作(車両速度、ブレーキ操作、方向指示器操作、走行経路等)状況を示す走行データとを記憶可能な構成となっている。
【0003】
上述したドライブレコーダは、CCD(Charge Coupled Device)カメラ、加速度センサ、カード状記憶媒体(以下、カードともいう)を内蔵している。そして、常時、運転者の視点(視野)から自車と周辺状況を撮像した前方映像等の映像情報を記憶しており、事故や急ブレーキ・急ハンドルなどの衝撃(例えば、0.4G以上)を受けると、例えば、衝撃直前12秒間と衝撃直後6秒間の計18秒間等の衝撃直前及び衝撃直後の所定時間にわたる映像と前記走行データ等を車両状況情報としてカードに記録していた。このように構成することで、記録した車両状況情報を解析することにより事故発生の原因を特定して、運転者教育などでフィードバックして意識の向上を図り、事故を未然に防ぐことができた。
【0004】
上述のドライブレコーダは、事故発生等に伴う衝撃をトリガ(即ち、記録条件)として車両状況情報を記録して、この車両状況情報を事故後に解析することにより、将来的な事故の発生を未然に防止するものであるが、事故発生の裏には、事故には至らなかったものの危険な状態に陥った多くの事例が潜在しており、このような事例の検出を記録条件として車両状況情報を記録、解析することにより、さらに事故発生を未然に防止することができる。そして、このような事例の1つとして車両のふらつき走行(蛇行)があり、ふらつき走行を検出する技術が、例えば、特許文献1に開示されている。
【0005】
特許文献1に開示されている装置は、車両前方を撮像するカメラを備えており、該カメラによって撮像された撮像情報から道路(車線)の白線を認識して、この白線から該道路における車両の走行位置(実測値)を検出する。そして、所定の移動平均期間(スムージング処理時間)における走行位置の移動平均値(スムージング処理値)を算出して、この走行位置の移動平均値と走行位置の実測値との差分の二乗を所定のふらつき判定期間(蛇行量算出時間)にわたって積算する。そして、この差分積算値(蛇行量)に基づいてふらつき走行を検出する。
【0006】
そして、ドライブレコーダにおいて、このようなふらつき走行の検出を記録条件として車両状況情報を記録することにより、事故発生を未然に防止できる情報をより多く収集することができ、安全性向上に寄与することができた。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−328455号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上述した特許文献1の装置では、走行位置の実測値を演算処理することにより、所定の移動平均期間における移動平均値及び所定のふらつき判定期間における差分積算値を算出して、車両のふらつき走行を検出しているが、これら移動平均期間及びふらつき判定期間を調整可能としているので、車両の種類や該車両が走行する道路の種類などの評価条件等に応じて異なる値が設定されてしまう場合があり、そのため、評価毎にふらつき走行の検出精度にばらつきが生じてしまうという問題があった。また、これら移動平均値及び差分積算値は、計測誤差を含む実測値に対して乗除処理を行って算出しているので、この乗除処理により演算誤差が混入してしまい、そのため、数値に含まれる誤差が拡大して、ふらつき走行の検出精度が低下してしまうという問題があった。また、移動平均算出処理など実測値の演算処理に伴う処理時間を要するので、ふらつき走行の検出に遅延が生じてしまうという問題があった。
【0009】
本発明は、上記課題に係る問題を解決することを目的としている。即ち、本発明は、車両のふらつき走行を一定の精度で検出できるとともに、高精度且つ高速に検出できるドライブレコーダを提供することを目的としている。
【課題を解決するための手段】
【0010】
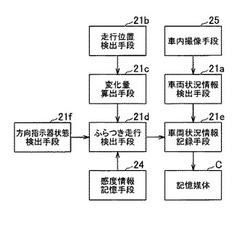
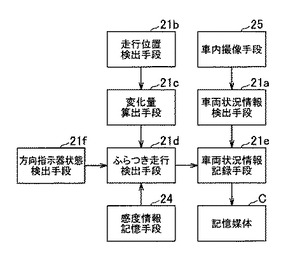
請求項1に記載された発明は、上記目的を達成するために、図1の基本構成図に示すように、車両の車両状況を示す車両状況情報を検出する車両状況情報検出手段21aを備えるとともに、前記車両に生じた衝撃を検出したとき、該衝撃を検出した直前に前記車両状況情報検出手段21aによって検出された車両状況情報を記録するドライブレコーダにおいて、前記車両が走行する車線内における前記車両の走行位置を周期的に検出する走行位置検出手段21bと、前記走行位置検出手段21bによって検出された最新の走行位置とその直前の走行位置との変化量を算出する変化量算出手段21cと、前記変化量算出手段21cによって算出された前記変化量が予め設定されたふらつき走行判定閾値を超えたときに前記車両のふらつき走行を検出するふらつき走行検出手段21dと、前記ふらつき走行検出手段21dによって前記車両のふらつき走行が検出されたとき、前記最新の走行位置を検出した直前に前記車両状況情報検出手段21aによって検出された前記車両状況情報を記憶媒体Cに記録する車両状況情報記録手段21eと、を備えていることを特徴とするドライブレコーダである。
【0011】
請求項1に記載された発明によれば、車両が走行する車線内における走行位置を周期的に検出して、最新の走行位置とその直前の走行位置との変化量を算出する。そして、この算出した変化量が予め設定されたふらつき走行判定閾値を超えていたときに車両がふらつき走行していることを検出して、最新の走行位置を検出した直前に検出された車両状況情報を記憶媒体に記録する。つまり、走行位置の変化量に基づいて車両のふらつき走行を検出して、ふらつき走行の検出に応じて直前の車両状況情報を記録媒体に記録する。
【0012】
請求項2に記載された発明は、請求項1に記載された発明において、図1の基本構成図に示すように、車両のふらつき走行の検出感度を示す感度情報が記憶される感度情報記憶手段24を備え、前記ふらつき走行検出手段21dが、前記感度情報記憶手段24に記憶された前記感度情報に応じて補正された前記ふらつき走行判定閾値を用いて前記車両のふらつき走行を検出することを特徴とするものである。
【0013】
請求項2に記載された発明によれば、車両のふらつき走行の検出感度を示す感度情報が記憶されており、この感度情報に応じて補正されたふらつき走行判定閾値を用いて車両のふらつき走行を検出する。
【0014】
請求項3に記載された発明は、請求項1又は2に記載された発明において、図1の基本構成図に示すように、前記車両の方向指示器が作動状態又は停止状態にあることを検出する方向指示器状態検出手段21fを備え、前記ふらつき走行検出手段21dが、前記変化量算出手段21cによって算出された前記変化量が予め設定されたふらつき走行判定閾値を超えるとともに、前記方向指示器状態検出手段21fによって前記方向指示器が停止状態にあることが検出されたときに、前記車両のふらつき走行を検出することを特徴とするものである。
【0015】
請求項3に記載された発明によれば、車両の方向指示器の動作状態(即ち、作動状態にあるか、又は、停止状態にあるか)を検出して、この検出された方向指示器の動作状態を含めて、車両のふらつき走行を検出する。
【0016】
請求項4に記載された発明は、請求項1〜3のいずれか一項に記載された発明において、図1の基本構成図に示すように、前記車両の車内を撮像する車内撮像手段25を備え、前記車両状況情報検出手段21aが、前記車内撮像手段25によって撮像された撮像情報を前記車両状況情報として検出することを特徴とするものである。
【0017】
請求項4に記載された発明によれば、車両の車内を撮像した撮像情報を車両状況情報として検出する。
【発明の効果】
【0018】
以上より、請求項1に記載された発明によれば、走行位置の変化量に基づいて車両のふらつき走行を検出しているので、移動平均期間やふらつき判定期間などの調整可能なパラメータを用いることなく車両のふらつき走行を検出でき、そのため、ふらつき走行の検出精度を一定にすることができる。また、この走行位置の変化量は、検出された2つの走行位置の実測値の一方から他方を減算することにより求めることができ、そのため、乗除処理等に比べて演算誤差の小さい減算処理を用いることにより、演算誤差を小さくすることができ、ふらつき走行を高精度で検出できる。また、移動平均算出処理などに比べて計算量の少ない減算処理を用いているので、ふらつき走行を高速に検出できる。
【0019】
請求項2に記載された発明によれば、車両のふらつき走行の検出感度を示す感度情報が記憶されており、この感度情報に応じて補正されたふらつき走行判定閾値を用いて車両のふらつき走行を検出するので、適切な感度情報を設定することにより、ふらつき走行の検出精度を適切に補正して誤検出を防ぐことができる。
【0020】
請求項3に記載された発明によれば、車両の方向指示器の動作状態(即ち、作動状態にあるか、又は、停止状態にあるか)を検出して、この検出された方向指示器の動作状態を含めて車両のふらつき走行を検出するので、車線変更などの適切な車両操作をふらつき走行として誤検出してしまうことを防ぐことができる。
【0021】
請求項4に記載された発明によれば、車両の車内を撮像した撮像情報を車両状況情報として検出するので、ふらつき走行を検出したときの車内の様子を記録することができ、ふらつき走行の要因をより明確にすることができる。
【図面の簡単な説明】
【0022】
【図1】本発明に係るドライブレコーダの基本構成を示す図である。
【図2】ドライブレコーダシステムの構成の一例を示すシステム構成図である。
【図3】図2のドライブレコーダの概略構成の一例を示す構成図である。
【図4】図3のCPUが実行する本発明に係る処理概要の一例を示すフローチャートである。
【図5】カメラにより撮像された車両前方の画像の一例を示す図である。
【図6】回転フィルタ法を説明するための図である。
【図7】自車両の走行位置と白線およびFOEの関係を説明するための図である。
【図8】車両の走行位置を説明するための図である。
【発明を実施するための形態】
【0023】
以下、本発明に係る、ドライブレコーダを用いたドライブレコーダシステムの一実施形態を、図2〜図8の図面を参照して説明する。
【0024】
ここで、図2は、ドライブレコーダシステムの構成の一例を示すシステム構成図であり、図3は、図2のドライブレコーダの概略構成の一例を示す構成図であり、図4、は図3のCPUが実行する本発明に係る処理概要の一例を示すフローチャートであり、図5は、カメラにより撮像された車両前方の画像の一例を示す図であり、図6は、回転フィルタ法を説明するための図であり、図7は、自車両の走行位置と白線およびFOEの関係を説明するための図であり、図8は、車両の走行位置を説明するための図である。
【0025】
ドライブレコーダシステム1は、図2に示すように、貨物輸送用トラック、タクシー、乗用車等の車両に搭載されるドライブレコーダ2と、前記車両を所有する会社、営業所、警察署等に設けられて、前記ドライブレコーダ2によってカード状記憶媒体(カード)Cに保存された記憶内容の解析を支援するドライブレコーダ解析ユニット5と、を有して構成している。
【0026】
カードCは、例えば、フラッシュメモリチップや小型ハードディスクドライブ装置等を内蔵した、周知のメモリカードを用いており、周知であるように、通電しなくても記憶内容が消えない不揮発記憶手段と、外部との入出力を受け持つコントローラ回路と、を有している。なお、カードCについては、システム構成に応じて種々異なるタイプのメモリカード等を用いることができる。
【0027】
次に、上述したドライブレコーダ解析ユニット5は、周知であるように、パーソナルコンピュータ(パソコン)50、キーボード、マウス等の入力装置51、表示装置52、リーダライタ53、プリンタ54等を有して構成している。そして、このパソコン50は、ハードディスク装置に記憶しているドライブレコーダ解析用のアプリケーションプログラムを実行することで、リーダライタ53のスロット53aに挿入されたカードCから撮像情報を取り込み、その撮像情報を表示装置52に表示し、又は、撮像情報の解析等を行う。
【0028】
次に、ドライブレコーダ2は、周知であるように、車両のフロントガラスの内面に対し、運転者の視界を妨げないように、例えば、バックミラーとほぼ同一の位置等に取り付けられる。そして、ドライブレコーダ2は、略直方体の箱状に形成されている筐体20Aと、この筐体20Aを所望の角度で保持した複数の取付状態で車両に固定される保持部材20Bと、を有している。また、ドライブレコーダ2は、電源や各種機器、センサなどと接続するためのケーブル20Hを有している。
【0029】
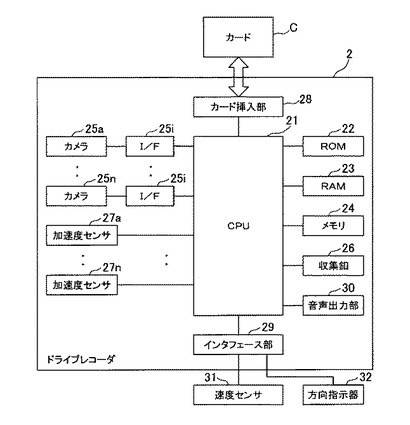
ドライブレコーダ2は、図3に示すように、予め定めたプログラムに従って各種の処理や制御などを行う中央演算処理装置(CPU)21、CPU21のためのプログラム等を格納した読み出し専用のメモリであるROM22、各種のデータを格納するとともにCPU21の処理作業に必要なエリアを有する読み出し書き込み自在のメモリであるRAM23等を有して構成している。
【0030】
CPU21には、装置本体がオフ状態の間も記憶内容の保持が可能な電気的消去/書き換え可能な読み出し専用のメモリ24を接続している。このメモリ24は、例えば、EEPROMなどの不揮発性メモリで構成され、後述するカメラ25a〜nによって撮像した画像などの撮像情報が予め定められた所望の範囲にわたって時系列的に記憶する一時格納エリアなどを有している。
【0031】
ドライブレコーダ2はさらに、複数のカメラ25a〜n、複数の加速度センサ27a〜n、カード挿入部28、音声出力部30等を有する構成となっている。そして、カメラ25a〜nの各々は、インタフェース回路(I/F)25iを介してCPU21に接続されている。
【0032】
カメラ25a〜nは、CCDカメラ、デジタルカメラ、ビデオカメラ、赤外線カメラ等の各種カメラを用いることができる。そして、カメラ25a〜nの各々は、車両の周辺映像などを常時撮像しており、この撮像した画像信号は、インタフェース回路25iによって変換、圧縮処理等が行われ、撮像情報としてCPU21に入力される。カメラ25a〜nのうち少なくとも1つのカメラ(本実施形態においては、カメラ25a)は、車両からの前景を撮像する。また、カメラ25a〜nのうち少なくとも1つのカメラ(本実施形態においてはカメラ25b、請求項中の車内撮像手段に相当)は、車両の車内を撮像するようにしてもよい。
【0033】
CPU21は、入力された撮像情報を車両状況情報としてメモリ24に時系列的に記憶する。このように撮像情報を車両状況情報とした場合について説明するが、車両状況情報を、撮像情報に車両の速度情報、加速度情報を加えて構成したり、速度情報、加速度情報のみで構成したりするなど、種々異なる形態とすることができる。また、撮像情報は、動画、静止画などドライブレコーダ2の構成、仕様等に応じて任意に定められるものである。
【0034】
また、本実施形態では、車両が走行する道路(即ち、車線)の区画線(中央線や車道外側線など、以下、「白線」ともいう)を含む車両からの前景を撮像するようにカメラ25aを筐体20Aの内部に設けており、車両の車内を撮像するようにカメラ25bを筐体20Aの内部に設けている。そして、それ以外のカメラ25c〜nをサブカメラとして車両の任意の箇所に設けるようにしている。そして、カメラ25c〜nは、例えば、車両の後方、側方、運転者、乗客、乗降用のドア等を撮像するように、車両の任意の箇所に設けられている。このように複数のカメラ25a〜nを車両における所望の箇所に配置することで、事故発生等の原因解析などに貢献することができる撮像情報を収集することができる。なお、本実施形態では、複数のカメラ25a〜nを用いる場合について説明するが、1台のカメラ25aのみ設けた構成、又は、2台のカメラ25a、25bのみ設けた構成、など種々異なる形態とすることができる。
【0035】
加速度センサ27a〜nは、3軸(X、Y、Z)方向の加速度・傾き・衝撃等を検出する3軸加速度センサを用いている。なお、3軸加速度センサは、周知であるように、薄いシリコンの梁(ビーム)によって錘を支え、加速度によって錘が動くことで梁が歪み、この歪みを梁上に形成したピエゾ抵抗素子等の抵抗変化で加速度を検出するようにしたものである。そして、加速度センサ27a〜nの各々は、検出した加速度を示す3軸方向の各加速度信号をCPU21に出力する。
【0036】
また、本実施形態では、加速度センサ27a〜nを、上述したカメラ25a〜nに対応させて設けており、加速度センサ27a、27bを筐体の内部に設け、加速度センサ27c〜nの各々を、カメラ25c〜nを設置した箇所の近傍に設けている。このように加速度センサ27a〜nを設置することで、カメラ25a〜nを設置した箇所に生じた衝撃に応じた撮像情報を収集することができるため、事故発生等の原因解析などに、より一層貢献することができる。
【0037】
カード挿入部28は、装着されたカードCに対してCPU21から指定された各種データの書き込み、読み込みを行うもので、カード挿入部28へのカードCの挿入は手動で行い、カードCの排出は、排出キーの操作に応じてカード挿入部28内の排出機構(図示せず)が自動で行う。
【0038】
なお、本実施形態では、カード挿入部28に挿入されるカードCを請求項中の記憶媒体とする場合について説明するが、本発明はこれに限定するものではなく、メモリ24を本発明の記憶媒体としたり、新たにハードディスク装置を内蔵させて本発明の記憶媒体としたり、するなど種々異なる形態とすることができる。
【0039】
音声出力部30は、各種音声及び効果音を生成するための周知の音声ICと、音声ICが生成した各種音声や効果音を出力するスピーカと、で構成されている。音声出力部30は、CPU21からの出力要求に基づいて、例えば、ふらつき走行が検出されたことを報知する警報音声など、各種音声及び効果音を出力する。
【0040】
ドライブレコーダ2はさらに、インタフェース部29を有しており、インタフェース部29はCPU21に接続されている。そして、このインタフェース部29には、車両の速度センサ31を接続しており、この速度センサ31が出力した車両の速度に応じた速度信号はCPU21に入力される。そして、この速度信号がCPU21によって車両状況情報を構成する中の1項目として検出されて記憶される。なお、カードCに記憶する車両状況情報の構成内容によっては、車両のブレーキ、舵角等の各種信号を車両からインタフェース部29を介してCPU21に入力させることもできる。また、車両の方向指示器32の動作状態(作動状態又は停止状態)を示す信号を車両からインタフェース部29を介してCPU21に入力させることもできる。
【0041】
上述したROM22には、特許請求の範囲に記載の車両状況情報検出手段、走行位置検出手段、変化量算出手段、ふらつき走行検出手段、車両状況情報記録手段、方向指示器状態検出手段、ふらつき走行警報手段等の各種手段としてCPU21(コンピュータ)を機能させるための各種プログラムを記憶している。また、ROM22には、検出対象の衝撃であるか否かを判定するための判定条件を記憶している。この判定条件は、加速度センサ27a〜nの各々に対して、X軸、Y軸、Z軸の各々に対する加速度の判定閾値データを有している。また、ROM22には、車両のふらつき走行の検出に用いられるふらつき走行判定閾値Sの算出式を記憶している。即ち、ROM22には、ふらつき走行判定閾値Sが予め設定されている。また、RAM23には、直前に検出した車両の走行位置を示す情報が記憶される直前走行位置格納エリアが設けられている。
【0042】
メモリ24は、上述したように車両状況情報を時系列的に記憶する車両状況情報記憶エリアと、カードCへの上書きが禁止されているときに車両状況情報を記憶する車両状況情報保存エリアと、カードCに対して上書きするか否かを示す保存モード情報エリアと、を有している。さらに、メモリ24は、車両のふらつき走行の検出感度を示す感度情報としてのふらつき感度係数Kを記憶する感度情報格納エリアと、車両幅Wを記憶する車両幅格納エリアと、を有している。本実施形態において、メモリ24は、請求項中の感度情報記憶手段に相当する。
【0043】
そして、該車両状況情報記憶エリアは、車両状況情報が検出される毎に先頭アドレスから順次記憶され、該エリアが終端アドレスまで記憶されると、再度先頭アドレスから車両状況情報が上書きされて記憶される。このように上書き機能を用いることで、限られた記憶エリアの有効利用を図っている。また、初期状態において、感度情報格納エリアには、ふらつき感度係数Kの初期値(例えば、0.8)が記憶されている。この感度情報格納エリアに記憶された値は工場出荷時に設定されるものであるが、ドライブレコーダ2の保守用端末装置などから書き換えが可能である。また、車両幅格納エリアには、ドライブレコーダ2が取り付けられる車両に応じた車両幅W(例えば、1500mm)が記憶されている。
【0044】
カードCは、車両における記録条件(即ち、衝撃又はふらつき走行)を検出した直前及び直後の所定時間範囲に対応して、メモリ24に記憶している車両状況情報が記憶される情報記憶エリアを有している。そして、情報記憶エリアも、メモリ24の車両状況情報記憶エリアと同様に、車両状況情報が上書きされて記憶される。
【0045】
本実施形態では、上書き条件として、記録条件を検出する度に先頭アドレスから上書きすることを条件とした場合について説明するが、上書き条件としては、記憶するデータ量が前記情報記憶エリアの空き容量よりも大きい場合など種々異なる形態とすることができる。なお、このカードCに対して上書きするか否かを示す保存モード情報は、メモリ24の保存モード情報エリアに記憶されており、初期設定は上書き保存を示している。
【0046】
上述したドライブレコーダ2は、各加速度センサ27a〜nによって、所定の衝撃閾値(例えば、0.4G)以上の衝撃(即ち、記録条件)を検出したとき、この検出の前後の所定時間範囲(検出直前12秒間と検出直後6秒間との計18秒間)に検出した、カメラ25a〜nの撮像情報(前景画像及び車内画像を含む)、車両の速度情報、ブレーキ情報、舵角情報などを含む車両状況情報を、メモリ24の車両状況情報記憶エリアからカードCの情報記憶エリアにコピー(即ち、記録)する。さらに、後述するふらつき走行検出処理において、ふらつき走行(即ち、記録条件)を検出したときも、同様に上記車両状況情報をメモリ24の車両状況情報記憶エリアからカードCの情報記憶エリアにコピーする。
【0047】
次に、ドライブレコーダ2のCPU21が実行する本発明に係る処理(ふらつき走行検出処理)の概要の一例を、図4のフローチャートを参照して説明する。
【0048】
ケーブル20Hを介した電力の供給に応じてCPU21が起動されて、初期処理が実行されると、RAM23の直前走行位置格納エリアなど各種エリアに予め定められた初期値が設定されるとともに、メモリ24の保存モード情報に初期値である上書き保存が設定される。そして、CPU21は、カメラ25a〜nの撮像情報(前景画像及び車内画像を含む)、車両の速度情報、ブレーキ情報、舵角情報などを含む車両状況情報を検出して、メモリ24に設けられた車両状況情報記憶エリアに時系列的に順次書き込んでいくとともに、これと並行して、処理をステップS110に進める。
【0049】
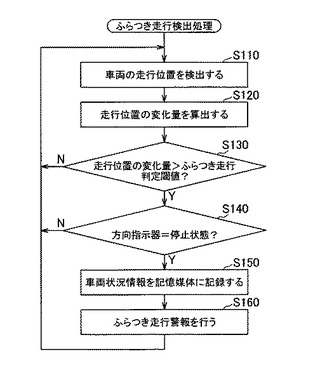
ステップS110では、車両の走行位置を検出する。具体的には、カメラ25aから車両の前方を撮像した撮像情報が取り込まれると、周期的(例えば、1秒毎)に該撮像情報を解析して、道路の白線を認識する処理(以下、単に「白線認識処理」ともいう)と、認識された白線を用いて自車両の位置を検出する処理(以下、単に「車両位置算出処理」ともいう)と、の2つの処理を行う。
【0050】
白線認識処理について説明する。一般に、道路を走行している際に撮像される画像では、白線部分には、(1)路面と比較して輝度が高い、(2)自車両近傍では白線は直線に近似できる、(3)白線の検出位置には連続性がある、という特徴がある。
【0051】
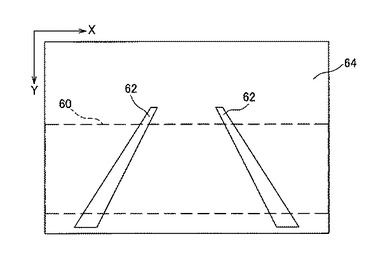
そこでまず、画像中の白線と路面との境界、つまり白線のエッジ点の検出を行う。図5は、撮像された自車両前方の画像の一例を示す図である。本図に示すように白線エッジの探索範囲60を、自車両近傍である画面下側に設定した。つづいて、画面中央から探索範囲60内で左右に向けて微分処理を行う。上述の通り、白線62部分の輝度が高く、白線62以外の路面64部分との境界に大きな輝度差がある。したがって、微分処理をすることで、境界の認識が容易にできる。微分処理において、微分した値が大きくなる点を白線のエッジ候補とする。
【0052】
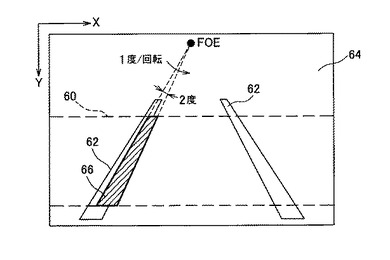
次に、回転フィルタを用いて白線62以外から生じる不要なエッジ候補点を除去する。図6は、不要なエッジ候補点を除去する回転フィルタ法を示す図である。1フレーム前の画像において、FOE(Focus Of Expansion)点を頂点とする頂角2度の三角形とエッジの探索範囲60の重なる領域を投票範囲66と定義する。ここで、FOEとは左右白線62を延長したときの交点である。この投票範囲66内でエッジ強度の合計を計算し、投票範囲66を図のように1度回転させる。そして再びエッジ強度の合計を計算し、投票範囲66を回転させる。この処理を繰り返し行い、エッジ強度の合計が最大の領域を決定する。ここで用いる回転角度の範囲は1フレーム前の白線62が持つ傾きに対して、プラス・マイナス7度である。
【0053】
以上のように決定された探索範囲60内の白線エッジ候補点を白線62のエッジ点として最小自乗法を用いて直線近似し、白線62と認識する。
【0054】
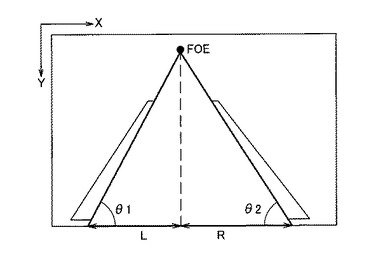
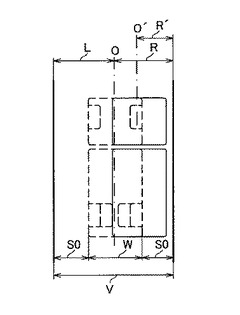
次に、自車両位置算出処理を説明する。図7は、自車両の走行位置と白線およびFOEの関係を示す図である。左側の白線と画面水平成分とのなす角をθ1、右側の白線と画面水平成分とのなす角をθ2と定義し、それら角度を求める。つづいて、1/tanθ1と1/tanθ2との比を求めることで、図8に示す車両中央Oから左側白線まで距離Lと車両中央Oから右側白線までの距離Rが求まり、車両の走行位置が特定される。本実施形態においては、右側白線までの距離Rを車両の走行位置としている。もちろん、距離Lを車両の走行位置としてもよく、又は、距離R及び距離Lをともに車両の走行位置としてもよい。また、距離Lと距離Rとを足し合わせることで車線幅Vを算出している。なお、上記白線認識処理および上記自車両位置算出処理は、特許文献1に記載された手法と同一のものであるが、上記の手法に限るものではなく、最終的に道路における車両の走行位置が特定できればどのような手法を用いてもよい。そして、上述の処理を終えるとステップS120に進む。
【0055】
ステップS120では、走行位置の変化量を算出する。具体的には、RAM23に設けられた直前走行位置格納エリアから読み出した直前の走行位置を、ステップS110で検出した走行位置(即ち、最新の走行位置)から減算した値の絶対値を走行位置の変化量Dとして算出する。即ち、直前の走行位置をR、最新の走行位置をR’、とすると走行位置の変化量Dは以下の(1)式に示される。
D=|R−R’| ・・・(1)
【0056】
また、直前の走行位置Rから最新の走行位置R’を減算した値の符号が、走行位置の変化方向を示している。即ち、符号が正のときは走行位置が右寄りに変化し、符号が負のときは走行位置が左寄りに変化したことを示す。また、直前走行位置格納エリアに記憶されている直前の走行位置が初期値の場合は、走行位置の変化量Dをゼロ(0)として算出する。そして、最新の走行位置R’を、直前走行位置格納エリアに記憶する。また、このとき、最新の走行位置R’が車線を逸脱してしまっていた場合は、直前走行位置格納エリアに初期値を記憶する。また、車線を逸脱してしまっていた場合に、所定の車線逸脱処理(例えば、車線を外れたことを報知する警報の出力など)を行うようにしてもよい。そして、ステップS130に進む。
【0057】
ステップS130では、走行位置の変化量Dがふらつき走行判定閾値Sを超えているか否かを判定する。具体的には、まず、ROM22に予め記憶されたふらつき走行判定閾値Sの算出式を読み出してふらつき走行判定閾値Sを算出する。本実施形態において、道路幅をV、車両幅をW、ふらつき感度係数をK、ふらつき走行判定基準閾値S0とすると、ふらつき走行判定閾値Sは以下の(2)、(3)式に示される。
S0=(V−W)/2 ・・・(2)
S=S0×K ・・・(3)
【0058】
本実施形態においては、この(2)、(3)式から判るように、車線幅Vから車両幅Wを差し引いた値の半分、即ち、車両が車線の中央を走行しているとき(図8に点線で示す)の、車両側面から白線までの距離を基準閾値S0として、この基準値にふらつき感度係数Kを乗じた値を、ふらつき走行判定閾値Sとして用いている。このふらつき感度係数Kを適切に設定することにより、ふらつき走行の検出精度を適切に補正して誤検出を防ぐことができる。もちろん、これは一例であり、ふらつき感度係数Kを設けない構成などでもよく、ふらつき走行判定閾値Sはドライブレコーダ2の構成などに応じて適宜定めてよい。
【0059】
そして、ステップS120で算出した変化量Dとこのふらつき走行判定閾値Sとを比較して、変化量Dがふらつき走行判定閾値を超えていたとき、ステップS140に進み(S130でY)、変化量Dがふらつき走行判定閾値以下のとき、ステップS110に戻り、再度、車両の走行位置を検出する(S130でN)。
【0060】
ステップS140では、方向指示器32が停止状態か否かを判定する。具体的には、インタフェース部29を介して、方向指示器32の動作状態を示す信号を受信して、この受信した信号が方向指示器の停止状態を示していたとき、車両のふらつき走行を検出したものとして、ステップS150に進み(S140でY)、作動状態を示していたとき、車線変更などの適切な車両操作に伴う走行位置の変化を検出したものとして、ステップS110に戻り、再度、車両の走行位置を検出する(S140でN)。
【0061】
ステップS150では、車両状況情報を記憶媒体に記録する。具体的には、ステップS140においてふらつき走行を検出した時点(即ち、最新の走行位置を検出した時点とほぼ同時)の直前及び直後の所定時間範囲(例えば、検出直前12秒間と検出直後6秒間との計18秒間)に検出したカメラ25a〜nの撮像情報、車両の速度情報、ブレーキ情報、舵角情報などを含む車両状況情報を、メモリ24の車両状況情報記憶エリアからカードCの情報記憶エリアにコピーする。なお、本実施形態では、ふらつき走行を検出した直前及び直後の所定時間範囲の車両状況情報をカードCにコピーするものであるが、これに限定されるものではなく、少なくとも、ふらつき走行を検出した直前の車両状況情報をカードCにコピー(即ち、記録)するものであればよい。そして、ステップS160に進む。
【0062】
ステップS160では、ふらつき走行の警報を行う。具体的には、音声出力部30に対して、ふらつき走行が検出されたことを報知する警報音声の出力を要求する信号を送信する。そして、本フローチャートに示す一連の処理を終了すると、ステップS110に戻り、再度、車両の走行位置を検出する。
【0063】
上述したステップS110は、請求項中の走行位置検出手段に相当し、ステップS120は、請求項中の変化量算出手段に相当し、ステップS130、S140は、請求項中のふらつき走行検出手段に相当し、ステップS140は、請求項中の方向指示器状態検出手段に相当し、ステップS150は、請求項中の車両状況情報記録手段に相当し、ステップS160は、ふらつき走行警報手段に相当する。
【0064】
なお、上記フローチャートにおいて、ステップS140を省略して、走行位置の変化量Dがふらつき走行判定閾値Sを超えていたとき(S130でY)、方向指示器の動作状態にかかわらず、ふらつき状態を検出したものとして車両状況情報を記録する(S150)処理としてもよい。また、ステップS160を省略して、ふらつき走行を検出したときに、車両状況情報の記録(S150)のみ行い、ふらつき走行の警報を行わない処理としてもよい。
【0065】
次に、上述したドライブレコーダ2における本発明に係る動作(作用)の一例について説明する。
【0066】
ドライブレコーダ2は、カメラ25a〜nの撮像情報、車両の速度情報、ブレーキ情報、舵角情報などを含む車両状況情報を常時検出して、メモリ24の一時格納エリアに時系列的に記憶し、そして、これと並行して、周期的(例えば、1秒毎)に、撮像情報に含まれる車両の前景画像に基づいて車両が走行している道路(車線)における該車両の走行位置を検出して(S110)、最新の走行位置R’とその直前の走行位置Rとの変化量Dを算出する(S120)。
【0067】
次に、走行位置の変化量Dがふらつき走行判定閾値Sを超えているかを判定する。例えば、車両の走行位置の検出と同時に検出した車線幅Vが3000mm、車両幅Wが1500mm、ふらつき感度係数Kが0.8、とすると、上記(2)、(3)式より、ふらつき走行判定閾値Sは、
S=(3000−1500)×0.8/2=600[mm]
となり、走行位置の変化量Dが600mm以下であれば、ふらつき走行ではないと判断して、引き続き、車両の走行位置の検出を続ける(S130でN)。
【0068】
また、走行位置の変化量Dが600mmを超えていたとき(S130でY)に、方向指示器32が作動状態であれば、車線変更などの適切な車両操作に伴う走行位置の変化と判断して、引き続き、車両の走行位置の検出を続ける(S140でN)。
【0069】
また、走行位置の変化量Dが600mmを超えていたとき(S130でY)に、方向指示器32が停止状態であれば(S140でY)、ふらつき走行を検出したものと判断して、ふらつき走行を検出した時点の直前及び直後の所定時間範囲(例えば、検出直前12秒間と検出直後6秒間との計18秒間)に検出した車両状況情報を、メモリ24の車両状況情報記憶エリアからカードCの情報記憶エリアにコピーする(S150)と同時に、ふらつき走行を検出したことを報知する警報を出力する(S160)。
【0070】
以上より、本実施形態によれば、車両が走行する車線内における走行位置を周期的に検出して、最新の走行位置とその直前の走行位置との変化量Dを算出する。そして、この算出した変化量Dが予め設定されたふらつき走行判定閾値Sを超えていたときに車両がふらつき走行していることを検出して、この検出した直前及び直後に検出された車両状況情報をカードCに記録する。つまり、走行位置の変化量に基づいて車両のふらつき走行を検出して、ふらつき走行の検出に応じて直前の車両状況情報をカードCに記録する。
【0071】
また、車両のふらつき走行の検出感度を示す感度情報としてのふらつき感度係数Kが記憶されており、このふらつき感度係数Kに応じて補正されたふらつき走行判定閾値Sを用いて車両のふらつき走行を検出する。
【0072】
また、車両の方向指示器32の動作状態(即ち、作動状態にあるか、又は、停止状態にあるか)を検出して、この検出された方向指示器32の動作状態を含めて、車両のふらつき走行を検出する。
【0073】
また、カメラ25bによって車両の車内を撮像した撮像情報を車両状況情報として検出する。
【0074】
また、車両のふらつき走行が検出されたとき、該車両がふらつき走行していることを報知する警報を出力する。
【0075】
以上より、本発明によれば、走行位置の変化量Dに基づいて車両のふらつき走行を検出しているので、移動平均期間やふらつき判定期間などの調整可能なパラメータを用いることなく車両のふらつき走行を検出でき、そのため、ふらつき走行の検出精度を一定にすることができる。また、この走行位置の変化量Dは、検出された2つの走行位置の実測値の一方から他方を減算することにより求めることができ、そのため、乗除処理等に比べて演算誤差の小さい減算処理を用いることにより、演算誤差を小さくすることができ、ふらつき走行を高精度で検出できる。また、移動平均算出処理などに比べて計算量の少ない減算処理を用いているので、ふらつき走行を高速に検出できる。
【0076】
また、車両のふらつき走行の検出感度を示すふらつき感度係数Kが記憶されており、この感度情報に応じて補正されたふらつき走行判定閾値Sを用いて車両のふらつき走行を検出するので、適切なふらつき感度係数Kを設定することにより、ふらつき走行の検出精度を適切に補正して誤検出を防ぐことができる。
【0077】
また、車両の方向指示器32の動作状態(即ち、作動状態にあるか、又は、停止状態にあるか)を検出して、この検出された方向指示器32の動作状態を含めて車両のふらつき走行を検出するので、車線変更などの適切な車両操作をふらつき走行として誤検出してしまうことを防ぐことができる。
【0078】
また、カメラ25bによって車両の車内を撮像した撮像情報を車両状況情報として検出するので、ふらつき走行を検出したときの車内の様子を記録することができ、ふらつき走行の要因をより明確にすることができる。
【0079】
また、車両のふらつき走行が検出されたとき、該車両がふらつき走行していることを報知する警報を出力するので、運転者にふらつき走行の注意喚起をすることができ、安全性を向上できる。
【0080】
なお、本実施形態においては、ドライブレコーダ2に予め設けられたCPU21を用いて、上述した図4のフローチャートに示されるふらつき走行検出処理を実行するものであったが、これに限定されるものではなく、上記CPU21に接続されたサブCPUを設けて、このサブCPUに上記ふらつき走行検出処理を実行させる構成としてもよい。この場合、車両の車内を撮像するカメラを、このサブCPUに接続する構成としてもよい。
【0081】
なお、前述した実施形態は本発明の代表的な形態を示したに過ぎず、本発明は、実施形態に限定されるものではない。即ち、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。
【符号の説明】
【0082】
1 ドライブレコーダシステム
2 ドライブレコーダ
5 ドライブレコーダ解析ユニット
21 CPU(車両状況情報検出手段、走行位置検出手段、変化量算出手段、ふらつき走行検出手段、車両状況情報記録手段、方向指示器状態検出手段、ふらつき走行警報手段)
24 メモリ(感度情報記憶手段)
25b カメラ(車内撮像手段)
32 方向指示器
C カード(記憶媒体)
【技術分野】
【0001】
本発明は、ドライブレコーダに関し、より詳細には、車両への衝撃の発生など所定の記録条件に基づいて、車両状況を示す車両状況情報を記憶媒体に記録するドライブレコーダに関する。
【背景技術】
【0002】
近年では、自動車事故を未然に防止する有効な手段になり得るものとして、事故発生時の前後の車両状況情報(前方映像、車両速度、急加減速など)を記録するドライブレコーダの運送事業者への導入が進んでいる。そして、例えば、タクシー、バス等の営業用車両に搭載されるドライブレコーダは、事故時及び急制動時等の前方映像とドライバーの運転操作(車両速度、ブレーキ操作、方向指示器操作、走行経路等)状況を示す走行データとを記憶可能な構成となっている。
【0003】
上述したドライブレコーダは、CCD(Charge Coupled Device)カメラ、加速度センサ、カード状記憶媒体(以下、カードともいう)を内蔵している。そして、常時、運転者の視点(視野)から自車と周辺状況を撮像した前方映像等の映像情報を記憶しており、事故や急ブレーキ・急ハンドルなどの衝撃(例えば、0.4G以上)を受けると、例えば、衝撃直前12秒間と衝撃直後6秒間の計18秒間等の衝撃直前及び衝撃直後の所定時間にわたる映像と前記走行データ等を車両状況情報としてカードに記録していた。このように構成することで、記録した車両状況情報を解析することにより事故発生の原因を特定して、運転者教育などでフィードバックして意識の向上を図り、事故を未然に防ぐことができた。
【0004】
上述のドライブレコーダは、事故発生等に伴う衝撃をトリガ(即ち、記録条件)として車両状況情報を記録して、この車両状況情報を事故後に解析することにより、将来的な事故の発生を未然に防止するものであるが、事故発生の裏には、事故には至らなかったものの危険な状態に陥った多くの事例が潜在しており、このような事例の検出を記録条件として車両状況情報を記録、解析することにより、さらに事故発生を未然に防止することができる。そして、このような事例の1つとして車両のふらつき走行(蛇行)があり、ふらつき走行を検出する技術が、例えば、特許文献1に開示されている。
【0005】
特許文献1に開示されている装置は、車両前方を撮像するカメラを備えており、該カメラによって撮像された撮像情報から道路(車線)の白線を認識して、この白線から該道路における車両の走行位置(実測値)を検出する。そして、所定の移動平均期間(スムージング処理時間)における走行位置の移動平均値(スムージング処理値)を算出して、この走行位置の移動平均値と走行位置の実測値との差分の二乗を所定のふらつき判定期間(蛇行量算出時間)にわたって積算する。そして、この差分積算値(蛇行量)に基づいてふらつき走行を検出する。
【0006】
そして、ドライブレコーダにおいて、このようなふらつき走行の検出を記録条件として車両状況情報を記録することにより、事故発生を未然に防止できる情報をより多く収集することができ、安全性向上に寄与することができた。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−328455号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上述した特許文献1の装置では、走行位置の実測値を演算処理することにより、所定の移動平均期間における移動平均値及び所定のふらつき判定期間における差分積算値を算出して、車両のふらつき走行を検出しているが、これら移動平均期間及びふらつき判定期間を調整可能としているので、車両の種類や該車両が走行する道路の種類などの評価条件等に応じて異なる値が設定されてしまう場合があり、そのため、評価毎にふらつき走行の検出精度にばらつきが生じてしまうという問題があった。また、これら移動平均値及び差分積算値は、計測誤差を含む実測値に対して乗除処理を行って算出しているので、この乗除処理により演算誤差が混入してしまい、そのため、数値に含まれる誤差が拡大して、ふらつき走行の検出精度が低下してしまうという問題があった。また、移動平均算出処理など実測値の演算処理に伴う処理時間を要するので、ふらつき走行の検出に遅延が生じてしまうという問題があった。
【0009】
本発明は、上記課題に係る問題を解決することを目的としている。即ち、本発明は、車両のふらつき走行を一定の精度で検出できるとともに、高精度且つ高速に検出できるドライブレコーダを提供することを目的としている。
【課題を解決するための手段】
【0010】
請求項1に記載された発明は、上記目的を達成するために、図1の基本構成図に示すように、車両の車両状況を示す車両状況情報を検出する車両状況情報検出手段21aを備えるとともに、前記車両に生じた衝撃を検出したとき、該衝撃を検出した直前に前記車両状況情報検出手段21aによって検出された車両状況情報を記録するドライブレコーダにおいて、前記車両が走行する車線内における前記車両の走行位置を周期的に検出する走行位置検出手段21bと、前記走行位置検出手段21bによって検出された最新の走行位置とその直前の走行位置との変化量を算出する変化量算出手段21cと、前記変化量算出手段21cによって算出された前記変化量が予め設定されたふらつき走行判定閾値を超えたときに前記車両のふらつき走行を検出するふらつき走行検出手段21dと、前記ふらつき走行検出手段21dによって前記車両のふらつき走行が検出されたとき、前記最新の走行位置を検出した直前に前記車両状況情報検出手段21aによって検出された前記車両状況情報を記憶媒体Cに記録する車両状況情報記録手段21eと、を備えていることを特徴とするドライブレコーダである。
【0011】
請求項1に記載された発明によれば、車両が走行する車線内における走行位置を周期的に検出して、最新の走行位置とその直前の走行位置との変化量を算出する。そして、この算出した変化量が予め設定されたふらつき走行判定閾値を超えていたときに車両がふらつき走行していることを検出して、最新の走行位置を検出した直前に検出された車両状況情報を記憶媒体に記録する。つまり、走行位置の変化量に基づいて車両のふらつき走行を検出して、ふらつき走行の検出に応じて直前の車両状況情報を記録媒体に記録する。
【0012】
請求項2に記載された発明は、請求項1に記載された発明において、図1の基本構成図に示すように、車両のふらつき走行の検出感度を示す感度情報が記憶される感度情報記憶手段24を備え、前記ふらつき走行検出手段21dが、前記感度情報記憶手段24に記憶された前記感度情報に応じて補正された前記ふらつき走行判定閾値を用いて前記車両のふらつき走行を検出することを特徴とするものである。
【0013】
請求項2に記載された発明によれば、車両のふらつき走行の検出感度を示す感度情報が記憶されており、この感度情報に応じて補正されたふらつき走行判定閾値を用いて車両のふらつき走行を検出する。
【0014】
請求項3に記載された発明は、請求項1又は2に記載された発明において、図1の基本構成図に示すように、前記車両の方向指示器が作動状態又は停止状態にあることを検出する方向指示器状態検出手段21fを備え、前記ふらつき走行検出手段21dが、前記変化量算出手段21cによって算出された前記変化量が予め設定されたふらつき走行判定閾値を超えるとともに、前記方向指示器状態検出手段21fによって前記方向指示器が停止状態にあることが検出されたときに、前記車両のふらつき走行を検出することを特徴とするものである。
【0015】
請求項3に記載された発明によれば、車両の方向指示器の動作状態(即ち、作動状態にあるか、又は、停止状態にあるか)を検出して、この検出された方向指示器の動作状態を含めて、車両のふらつき走行を検出する。
【0016】
請求項4に記載された発明は、請求項1〜3のいずれか一項に記載された発明において、図1の基本構成図に示すように、前記車両の車内を撮像する車内撮像手段25を備え、前記車両状況情報検出手段21aが、前記車内撮像手段25によって撮像された撮像情報を前記車両状況情報として検出することを特徴とするものである。
【0017】
請求項4に記載された発明によれば、車両の車内を撮像した撮像情報を車両状況情報として検出する。
【発明の効果】
【0018】
以上より、請求項1に記載された発明によれば、走行位置の変化量に基づいて車両のふらつき走行を検出しているので、移動平均期間やふらつき判定期間などの調整可能なパラメータを用いることなく車両のふらつき走行を検出でき、そのため、ふらつき走行の検出精度を一定にすることができる。また、この走行位置の変化量は、検出された2つの走行位置の実測値の一方から他方を減算することにより求めることができ、そのため、乗除処理等に比べて演算誤差の小さい減算処理を用いることにより、演算誤差を小さくすることができ、ふらつき走行を高精度で検出できる。また、移動平均算出処理などに比べて計算量の少ない減算処理を用いているので、ふらつき走行を高速に検出できる。
【0019】
請求項2に記載された発明によれば、車両のふらつき走行の検出感度を示す感度情報が記憶されており、この感度情報に応じて補正されたふらつき走行判定閾値を用いて車両のふらつき走行を検出するので、適切な感度情報を設定することにより、ふらつき走行の検出精度を適切に補正して誤検出を防ぐことができる。
【0020】
請求項3に記載された発明によれば、車両の方向指示器の動作状態(即ち、作動状態にあるか、又は、停止状態にあるか)を検出して、この検出された方向指示器の動作状態を含めて車両のふらつき走行を検出するので、車線変更などの適切な車両操作をふらつき走行として誤検出してしまうことを防ぐことができる。
【0021】
請求項4に記載された発明によれば、車両の車内を撮像した撮像情報を車両状況情報として検出するので、ふらつき走行を検出したときの車内の様子を記録することができ、ふらつき走行の要因をより明確にすることができる。
【図面の簡単な説明】
【0022】
【図1】本発明に係るドライブレコーダの基本構成を示す図である。
【図2】ドライブレコーダシステムの構成の一例を示すシステム構成図である。
【図3】図2のドライブレコーダの概略構成の一例を示す構成図である。
【図4】図3のCPUが実行する本発明に係る処理概要の一例を示すフローチャートである。
【図5】カメラにより撮像された車両前方の画像の一例を示す図である。
【図6】回転フィルタ法を説明するための図である。
【図7】自車両の走行位置と白線およびFOEの関係を説明するための図である。
【図8】車両の走行位置を説明するための図である。
【発明を実施するための形態】
【0023】
以下、本発明に係る、ドライブレコーダを用いたドライブレコーダシステムの一実施形態を、図2〜図8の図面を参照して説明する。
【0024】
ここで、図2は、ドライブレコーダシステムの構成の一例を示すシステム構成図であり、図3は、図2のドライブレコーダの概略構成の一例を示す構成図であり、図4、は図3のCPUが実行する本発明に係る処理概要の一例を示すフローチャートであり、図5は、カメラにより撮像された車両前方の画像の一例を示す図であり、図6は、回転フィルタ法を説明するための図であり、図7は、自車両の走行位置と白線およびFOEの関係を説明するための図であり、図8は、車両の走行位置を説明するための図である。
【0025】
ドライブレコーダシステム1は、図2に示すように、貨物輸送用トラック、タクシー、乗用車等の車両に搭載されるドライブレコーダ2と、前記車両を所有する会社、営業所、警察署等に設けられて、前記ドライブレコーダ2によってカード状記憶媒体(カード)Cに保存された記憶内容の解析を支援するドライブレコーダ解析ユニット5と、を有して構成している。
【0026】
カードCは、例えば、フラッシュメモリチップや小型ハードディスクドライブ装置等を内蔵した、周知のメモリカードを用いており、周知であるように、通電しなくても記憶内容が消えない不揮発記憶手段と、外部との入出力を受け持つコントローラ回路と、を有している。なお、カードCについては、システム構成に応じて種々異なるタイプのメモリカード等を用いることができる。
【0027】
次に、上述したドライブレコーダ解析ユニット5は、周知であるように、パーソナルコンピュータ(パソコン)50、キーボード、マウス等の入力装置51、表示装置52、リーダライタ53、プリンタ54等を有して構成している。そして、このパソコン50は、ハードディスク装置に記憶しているドライブレコーダ解析用のアプリケーションプログラムを実行することで、リーダライタ53のスロット53aに挿入されたカードCから撮像情報を取り込み、その撮像情報を表示装置52に表示し、又は、撮像情報の解析等を行う。
【0028】
次に、ドライブレコーダ2は、周知であるように、車両のフロントガラスの内面に対し、運転者の視界を妨げないように、例えば、バックミラーとほぼ同一の位置等に取り付けられる。そして、ドライブレコーダ2は、略直方体の箱状に形成されている筐体20Aと、この筐体20Aを所望の角度で保持した複数の取付状態で車両に固定される保持部材20Bと、を有している。また、ドライブレコーダ2は、電源や各種機器、センサなどと接続するためのケーブル20Hを有している。
【0029】
ドライブレコーダ2は、図3に示すように、予め定めたプログラムに従って各種の処理や制御などを行う中央演算処理装置(CPU)21、CPU21のためのプログラム等を格納した読み出し専用のメモリであるROM22、各種のデータを格納するとともにCPU21の処理作業に必要なエリアを有する読み出し書き込み自在のメモリであるRAM23等を有して構成している。
【0030】
CPU21には、装置本体がオフ状態の間も記憶内容の保持が可能な電気的消去/書き換え可能な読み出し専用のメモリ24を接続している。このメモリ24は、例えば、EEPROMなどの不揮発性メモリで構成され、後述するカメラ25a〜nによって撮像した画像などの撮像情報が予め定められた所望の範囲にわたって時系列的に記憶する一時格納エリアなどを有している。
【0031】
ドライブレコーダ2はさらに、複数のカメラ25a〜n、複数の加速度センサ27a〜n、カード挿入部28、音声出力部30等を有する構成となっている。そして、カメラ25a〜nの各々は、インタフェース回路(I/F)25iを介してCPU21に接続されている。
【0032】
カメラ25a〜nは、CCDカメラ、デジタルカメラ、ビデオカメラ、赤外線カメラ等の各種カメラを用いることができる。そして、カメラ25a〜nの各々は、車両の周辺映像などを常時撮像しており、この撮像した画像信号は、インタフェース回路25iによって変換、圧縮処理等が行われ、撮像情報としてCPU21に入力される。カメラ25a〜nのうち少なくとも1つのカメラ(本実施形態においては、カメラ25a)は、車両からの前景を撮像する。また、カメラ25a〜nのうち少なくとも1つのカメラ(本実施形態においてはカメラ25b、請求項中の車内撮像手段に相当)は、車両の車内を撮像するようにしてもよい。
【0033】
CPU21は、入力された撮像情報を車両状況情報としてメモリ24に時系列的に記憶する。このように撮像情報を車両状況情報とした場合について説明するが、車両状況情報を、撮像情報に車両の速度情報、加速度情報を加えて構成したり、速度情報、加速度情報のみで構成したりするなど、種々異なる形態とすることができる。また、撮像情報は、動画、静止画などドライブレコーダ2の構成、仕様等に応じて任意に定められるものである。
【0034】
また、本実施形態では、車両が走行する道路(即ち、車線)の区画線(中央線や車道外側線など、以下、「白線」ともいう)を含む車両からの前景を撮像するようにカメラ25aを筐体20Aの内部に設けており、車両の車内を撮像するようにカメラ25bを筐体20Aの内部に設けている。そして、それ以外のカメラ25c〜nをサブカメラとして車両の任意の箇所に設けるようにしている。そして、カメラ25c〜nは、例えば、車両の後方、側方、運転者、乗客、乗降用のドア等を撮像するように、車両の任意の箇所に設けられている。このように複数のカメラ25a〜nを車両における所望の箇所に配置することで、事故発生等の原因解析などに貢献することができる撮像情報を収集することができる。なお、本実施形態では、複数のカメラ25a〜nを用いる場合について説明するが、1台のカメラ25aのみ設けた構成、又は、2台のカメラ25a、25bのみ設けた構成、など種々異なる形態とすることができる。
【0035】
加速度センサ27a〜nは、3軸(X、Y、Z)方向の加速度・傾き・衝撃等を検出する3軸加速度センサを用いている。なお、3軸加速度センサは、周知であるように、薄いシリコンの梁(ビーム)によって錘を支え、加速度によって錘が動くことで梁が歪み、この歪みを梁上に形成したピエゾ抵抗素子等の抵抗変化で加速度を検出するようにしたものである。そして、加速度センサ27a〜nの各々は、検出した加速度を示す3軸方向の各加速度信号をCPU21に出力する。
【0036】
また、本実施形態では、加速度センサ27a〜nを、上述したカメラ25a〜nに対応させて設けており、加速度センサ27a、27bを筐体の内部に設け、加速度センサ27c〜nの各々を、カメラ25c〜nを設置した箇所の近傍に設けている。このように加速度センサ27a〜nを設置することで、カメラ25a〜nを設置した箇所に生じた衝撃に応じた撮像情報を収集することができるため、事故発生等の原因解析などに、より一層貢献することができる。
【0037】
カード挿入部28は、装着されたカードCに対してCPU21から指定された各種データの書き込み、読み込みを行うもので、カード挿入部28へのカードCの挿入は手動で行い、カードCの排出は、排出キーの操作に応じてカード挿入部28内の排出機構(図示せず)が自動で行う。
【0038】
なお、本実施形態では、カード挿入部28に挿入されるカードCを請求項中の記憶媒体とする場合について説明するが、本発明はこれに限定するものではなく、メモリ24を本発明の記憶媒体としたり、新たにハードディスク装置を内蔵させて本発明の記憶媒体としたり、するなど種々異なる形態とすることができる。
【0039】
音声出力部30は、各種音声及び効果音を生成するための周知の音声ICと、音声ICが生成した各種音声や効果音を出力するスピーカと、で構成されている。音声出力部30は、CPU21からの出力要求に基づいて、例えば、ふらつき走行が検出されたことを報知する警報音声など、各種音声及び効果音を出力する。
【0040】
ドライブレコーダ2はさらに、インタフェース部29を有しており、インタフェース部29はCPU21に接続されている。そして、このインタフェース部29には、車両の速度センサ31を接続しており、この速度センサ31が出力した車両の速度に応じた速度信号はCPU21に入力される。そして、この速度信号がCPU21によって車両状況情報を構成する中の1項目として検出されて記憶される。なお、カードCに記憶する車両状況情報の構成内容によっては、車両のブレーキ、舵角等の各種信号を車両からインタフェース部29を介してCPU21に入力させることもできる。また、車両の方向指示器32の動作状態(作動状態又は停止状態)を示す信号を車両からインタフェース部29を介してCPU21に入力させることもできる。
【0041】
上述したROM22には、特許請求の範囲に記載の車両状況情報検出手段、走行位置検出手段、変化量算出手段、ふらつき走行検出手段、車両状況情報記録手段、方向指示器状態検出手段、ふらつき走行警報手段等の各種手段としてCPU21(コンピュータ)を機能させるための各種プログラムを記憶している。また、ROM22には、検出対象の衝撃であるか否かを判定するための判定条件を記憶している。この判定条件は、加速度センサ27a〜nの各々に対して、X軸、Y軸、Z軸の各々に対する加速度の判定閾値データを有している。また、ROM22には、車両のふらつき走行の検出に用いられるふらつき走行判定閾値Sの算出式を記憶している。即ち、ROM22には、ふらつき走行判定閾値Sが予め設定されている。また、RAM23には、直前に検出した車両の走行位置を示す情報が記憶される直前走行位置格納エリアが設けられている。
【0042】
メモリ24は、上述したように車両状況情報を時系列的に記憶する車両状況情報記憶エリアと、カードCへの上書きが禁止されているときに車両状況情報を記憶する車両状況情報保存エリアと、カードCに対して上書きするか否かを示す保存モード情報エリアと、を有している。さらに、メモリ24は、車両のふらつき走行の検出感度を示す感度情報としてのふらつき感度係数Kを記憶する感度情報格納エリアと、車両幅Wを記憶する車両幅格納エリアと、を有している。本実施形態において、メモリ24は、請求項中の感度情報記憶手段に相当する。
【0043】
そして、該車両状況情報記憶エリアは、車両状況情報が検出される毎に先頭アドレスから順次記憶され、該エリアが終端アドレスまで記憶されると、再度先頭アドレスから車両状況情報が上書きされて記憶される。このように上書き機能を用いることで、限られた記憶エリアの有効利用を図っている。また、初期状態において、感度情報格納エリアには、ふらつき感度係数Kの初期値(例えば、0.8)が記憶されている。この感度情報格納エリアに記憶された値は工場出荷時に設定されるものであるが、ドライブレコーダ2の保守用端末装置などから書き換えが可能である。また、車両幅格納エリアには、ドライブレコーダ2が取り付けられる車両に応じた車両幅W(例えば、1500mm)が記憶されている。
【0044】
カードCは、車両における記録条件(即ち、衝撃又はふらつき走行)を検出した直前及び直後の所定時間範囲に対応して、メモリ24に記憶している車両状況情報が記憶される情報記憶エリアを有している。そして、情報記憶エリアも、メモリ24の車両状況情報記憶エリアと同様に、車両状況情報が上書きされて記憶される。
【0045】
本実施形態では、上書き条件として、記録条件を検出する度に先頭アドレスから上書きすることを条件とした場合について説明するが、上書き条件としては、記憶するデータ量が前記情報記憶エリアの空き容量よりも大きい場合など種々異なる形態とすることができる。なお、このカードCに対して上書きするか否かを示す保存モード情報は、メモリ24の保存モード情報エリアに記憶されており、初期設定は上書き保存を示している。
【0046】
上述したドライブレコーダ2は、各加速度センサ27a〜nによって、所定の衝撃閾値(例えば、0.4G)以上の衝撃(即ち、記録条件)を検出したとき、この検出の前後の所定時間範囲(検出直前12秒間と検出直後6秒間との計18秒間)に検出した、カメラ25a〜nの撮像情報(前景画像及び車内画像を含む)、車両の速度情報、ブレーキ情報、舵角情報などを含む車両状況情報を、メモリ24の車両状況情報記憶エリアからカードCの情報記憶エリアにコピー(即ち、記録)する。さらに、後述するふらつき走行検出処理において、ふらつき走行(即ち、記録条件)を検出したときも、同様に上記車両状況情報をメモリ24の車両状況情報記憶エリアからカードCの情報記憶エリアにコピーする。
【0047】
次に、ドライブレコーダ2のCPU21が実行する本発明に係る処理(ふらつき走行検出処理)の概要の一例を、図4のフローチャートを参照して説明する。
【0048】
ケーブル20Hを介した電力の供給に応じてCPU21が起動されて、初期処理が実行されると、RAM23の直前走行位置格納エリアなど各種エリアに予め定められた初期値が設定されるとともに、メモリ24の保存モード情報に初期値である上書き保存が設定される。そして、CPU21は、カメラ25a〜nの撮像情報(前景画像及び車内画像を含む)、車両の速度情報、ブレーキ情報、舵角情報などを含む車両状況情報を検出して、メモリ24に設けられた車両状況情報記憶エリアに時系列的に順次書き込んでいくとともに、これと並行して、処理をステップS110に進める。
【0049】
ステップS110では、車両の走行位置を検出する。具体的には、カメラ25aから車両の前方を撮像した撮像情報が取り込まれると、周期的(例えば、1秒毎)に該撮像情報を解析して、道路の白線を認識する処理(以下、単に「白線認識処理」ともいう)と、認識された白線を用いて自車両の位置を検出する処理(以下、単に「車両位置算出処理」ともいう)と、の2つの処理を行う。
【0050】
白線認識処理について説明する。一般に、道路を走行している際に撮像される画像では、白線部分には、(1)路面と比較して輝度が高い、(2)自車両近傍では白線は直線に近似できる、(3)白線の検出位置には連続性がある、という特徴がある。
【0051】
そこでまず、画像中の白線と路面との境界、つまり白線のエッジ点の検出を行う。図5は、撮像された自車両前方の画像の一例を示す図である。本図に示すように白線エッジの探索範囲60を、自車両近傍である画面下側に設定した。つづいて、画面中央から探索範囲60内で左右に向けて微分処理を行う。上述の通り、白線62部分の輝度が高く、白線62以外の路面64部分との境界に大きな輝度差がある。したがって、微分処理をすることで、境界の認識が容易にできる。微分処理において、微分した値が大きくなる点を白線のエッジ候補とする。
【0052】
次に、回転フィルタを用いて白線62以外から生じる不要なエッジ候補点を除去する。図6は、不要なエッジ候補点を除去する回転フィルタ法を示す図である。1フレーム前の画像において、FOE(Focus Of Expansion)点を頂点とする頂角2度の三角形とエッジの探索範囲60の重なる領域を投票範囲66と定義する。ここで、FOEとは左右白線62を延長したときの交点である。この投票範囲66内でエッジ強度の合計を計算し、投票範囲66を図のように1度回転させる。そして再びエッジ強度の合計を計算し、投票範囲66を回転させる。この処理を繰り返し行い、エッジ強度の合計が最大の領域を決定する。ここで用いる回転角度の範囲は1フレーム前の白線62が持つ傾きに対して、プラス・マイナス7度である。
【0053】
以上のように決定された探索範囲60内の白線エッジ候補点を白線62のエッジ点として最小自乗法を用いて直線近似し、白線62と認識する。
【0054】
次に、自車両位置算出処理を説明する。図7は、自車両の走行位置と白線およびFOEの関係を示す図である。左側の白線と画面水平成分とのなす角をθ1、右側の白線と画面水平成分とのなす角をθ2と定義し、それら角度を求める。つづいて、1/tanθ1と1/tanθ2との比を求めることで、図8に示す車両中央Oから左側白線まで距離Lと車両中央Oから右側白線までの距離Rが求まり、車両の走行位置が特定される。本実施形態においては、右側白線までの距離Rを車両の走行位置としている。もちろん、距離Lを車両の走行位置としてもよく、又は、距離R及び距離Lをともに車両の走行位置としてもよい。また、距離Lと距離Rとを足し合わせることで車線幅Vを算出している。なお、上記白線認識処理および上記自車両位置算出処理は、特許文献1に記載された手法と同一のものであるが、上記の手法に限るものではなく、最終的に道路における車両の走行位置が特定できればどのような手法を用いてもよい。そして、上述の処理を終えるとステップS120に進む。
【0055】
ステップS120では、走行位置の変化量を算出する。具体的には、RAM23に設けられた直前走行位置格納エリアから読み出した直前の走行位置を、ステップS110で検出した走行位置(即ち、最新の走行位置)から減算した値の絶対値を走行位置の変化量Dとして算出する。即ち、直前の走行位置をR、最新の走行位置をR’、とすると走行位置の変化量Dは以下の(1)式に示される。
D=|R−R’| ・・・(1)
【0056】
また、直前の走行位置Rから最新の走行位置R’を減算した値の符号が、走行位置の変化方向を示している。即ち、符号が正のときは走行位置が右寄りに変化し、符号が負のときは走行位置が左寄りに変化したことを示す。また、直前走行位置格納エリアに記憶されている直前の走行位置が初期値の場合は、走行位置の変化量Dをゼロ(0)として算出する。そして、最新の走行位置R’を、直前走行位置格納エリアに記憶する。また、このとき、最新の走行位置R’が車線を逸脱してしまっていた場合は、直前走行位置格納エリアに初期値を記憶する。また、車線を逸脱してしまっていた場合に、所定の車線逸脱処理(例えば、車線を外れたことを報知する警報の出力など)を行うようにしてもよい。そして、ステップS130に進む。
【0057】
ステップS130では、走行位置の変化量Dがふらつき走行判定閾値Sを超えているか否かを判定する。具体的には、まず、ROM22に予め記憶されたふらつき走行判定閾値Sの算出式を読み出してふらつき走行判定閾値Sを算出する。本実施形態において、道路幅をV、車両幅をW、ふらつき感度係数をK、ふらつき走行判定基準閾値S0とすると、ふらつき走行判定閾値Sは以下の(2)、(3)式に示される。
S0=(V−W)/2 ・・・(2)
S=S0×K ・・・(3)
【0058】
本実施形態においては、この(2)、(3)式から判るように、車線幅Vから車両幅Wを差し引いた値の半分、即ち、車両が車線の中央を走行しているとき(図8に点線で示す)の、車両側面から白線までの距離を基準閾値S0として、この基準値にふらつき感度係数Kを乗じた値を、ふらつき走行判定閾値Sとして用いている。このふらつき感度係数Kを適切に設定することにより、ふらつき走行の検出精度を適切に補正して誤検出を防ぐことができる。もちろん、これは一例であり、ふらつき感度係数Kを設けない構成などでもよく、ふらつき走行判定閾値Sはドライブレコーダ2の構成などに応じて適宜定めてよい。
【0059】
そして、ステップS120で算出した変化量Dとこのふらつき走行判定閾値Sとを比較して、変化量Dがふらつき走行判定閾値を超えていたとき、ステップS140に進み(S130でY)、変化量Dがふらつき走行判定閾値以下のとき、ステップS110に戻り、再度、車両の走行位置を検出する(S130でN)。
【0060】
ステップS140では、方向指示器32が停止状態か否かを判定する。具体的には、インタフェース部29を介して、方向指示器32の動作状態を示す信号を受信して、この受信した信号が方向指示器の停止状態を示していたとき、車両のふらつき走行を検出したものとして、ステップS150に進み(S140でY)、作動状態を示していたとき、車線変更などの適切な車両操作に伴う走行位置の変化を検出したものとして、ステップS110に戻り、再度、車両の走行位置を検出する(S140でN)。
【0061】
ステップS150では、車両状況情報を記憶媒体に記録する。具体的には、ステップS140においてふらつき走行を検出した時点(即ち、最新の走行位置を検出した時点とほぼ同時)の直前及び直後の所定時間範囲(例えば、検出直前12秒間と検出直後6秒間との計18秒間)に検出したカメラ25a〜nの撮像情報、車両の速度情報、ブレーキ情報、舵角情報などを含む車両状況情報を、メモリ24の車両状況情報記憶エリアからカードCの情報記憶エリアにコピーする。なお、本実施形態では、ふらつき走行を検出した直前及び直後の所定時間範囲の車両状況情報をカードCにコピーするものであるが、これに限定されるものではなく、少なくとも、ふらつき走行を検出した直前の車両状況情報をカードCにコピー(即ち、記録)するものであればよい。そして、ステップS160に進む。
【0062】
ステップS160では、ふらつき走行の警報を行う。具体的には、音声出力部30に対して、ふらつき走行が検出されたことを報知する警報音声の出力を要求する信号を送信する。そして、本フローチャートに示す一連の処理を終了すると、ステップS110に戻り、再度、車両の走行位置を検出する。
【0063】
上述したステップS110は、請求項中の走行位置検出手段に相当し、ステップS120は、請求項中の変化量算出手段に相当し、ステップS130、S140は、請求項中のふらつき走行検出手段に相当し、ステップS140は、請求項中の方向指示器状態検出手段に相当し、ステップS150は、請求項中の車両状況情報記録手段に相当し、ステップS160は、ふらつき走行警報手段に相当する。
【0064】
なお、上記フローチャートにおいて、ステップS140を省略して、走行位置の変化量Dがふらつき走行判定閾値Sを超えていたとき(S130でY)、方向指示器の動作状態にかかわらず、ふらつき状態を検出したものとして車両状況情報を記録する(S150)処理としてもよい。また、ステップS160を省略して、ふらつき走行を検出したときに、車両状況情報の記録(S150)のみ行い、ふらつき走行の警報を行わない処理としてもよい。
【0065】
次に、上述したドライブレコーダ2における本発明に係る動作(作用)の一例について説明する。
【0066】
ドライブレコーダ2は、カメラ25a〜nの撮像情報、車両の速度情報、ブレーキ情報、舵角情報などを含む車両状況情報を常時検出して、メモリ24の一時格納エリアに時系列的に記憶し、そして、これと並行して、周期的(例えば、1秒毎)に、撮像情報に含まれる車両の前景画像に基づいて車両が走行している道路(車線)における該車両の走行位置を検出して(S110)、最新の走行位置R’とその直前の走行位置Rとの変化量Dを算出する(S120)。
【0067】
次に、走行位置の変化量Dがふらつき走行判定閾値Sを超えているかを判定する。例えば、車両の走行位置の検出と同時に検出した車線幅Vが3000mm、車両幅Wが1500mm、ふらつき感度係数Kが0.8、とすると、上記(2)、(3)式より、ふらつき走行判定閾値Sは、
S=(3000−1500)×0.8/2=600[mm]
となり、走行位置の変化量Dが600mm以下であれば、ふらつき走行ではないと判断して、引き続き、車両の走行位置の検出を続ける(S130でN)。
【0068】
また、走行位置の変化量Dが600mmを超えていたとき(S130でY)に、方向指示器32が作動状態であれば、車線変更などの適切な車両操作に伴う走行位置の変化と判断して、引き続き、車両の走行位置の検出を続ける(S140でN)。
【0069】
また、走行位置の変化量Dが600mmを超えていたとき(S130でY)に、方向指示器32が停止状態であれば(S140でY)、ふらつき走行を検出したものと判断して、ふらつき走行を検出した時点の直前及び直後の所定時間範囲(例えば、検出直前12秒間と検出直後6秒間との計18秒間)に検出した車両状況情報を、メモリ24の車両状況情報記憶エリアからカードCの情報記憶エリアにコピーする(S150)と同時に、ふらつき走行を検出したことを報知する警報を出力する(S160)。
【0070】
以上より、本実施形態によれば、車両が走行する車線内における走行位置を周期的に検出して、最新の走行位置とその直前の走行位置との変化量Dを算出する。そして、この算出した変化量Dが予め設定されたふらつき走行判定閾値Sを超えていたときに車両がふらつき走行していることを検出して、この検出した直前及び直後に検出された車両状況情報をカードCに記録する。つまり、走行位置の変化量に基づいて車両のふらつき走行を検出して、ふらつき走行の検出に応じて直前の車両状況情報をカードCに記録する。
【0071】
また、車両のふらつき走行の検出感度を示す感度情報としてのふらつき感度係数Kが記憶されており、このふらつき感度係数Kに応じて補正されたふらつき走行判定閾値Sを用いて車両のふらつき走行を検出する。
【0072】
また、車両の方向指示器32の動作状態(即ち、作動状態にあるか、又は、停止状態にあるか)を検出して、この検出された方向指示器32の動作状態を含めて、車両のふらつき走行を検出する。
【0073】
また、カメラ25bによって車両の車内を撮像した撮像情報を車両状況情報として検出する。
【0074】
また、車両のふらつき走行が検出されたとき、該車両がふらつき走行していることを報知する警報を出力する。
【0075】
以上より、本発明によれば、走行位置の変化量Dに基づいて車両のふらつき走行を検出しているので、移動平均期間やふらつき判定期間などの調整可能なパラメータを用いることなく車両のふらつき走行を検出でき、そのため、ふらつき走行の検出精度を一定にすることができる。また、この走行位置の変化量Dは、検出された2つの走行位置の実測値の一方から他方を減算することにより求めることができ、そのため、乗除処理等に比べて演算誤差の小さい減算処理を用いることにより、演算誤差を小さくすることができ、ふらつき走行を高精度で検出できる。また、移動平均算出処理などに比べて計算量の少ない減算処理を用いているので、ふらつき走行を高速に検出できる。
【0076】
また、車両のふらつき走行の検出感度を示すふらつき感度係数Kが記憶されており、この感度情報に応じて補正されたふらつき走行判定閾値Sを用いて車両のふらつき走行を検出するので、適切なふらつき感度係数Kを設定することにより、ふらつき走行の検出精度を適切に補正して誤検出を防ぐことができる。
【0077】
また、車両の方向指示器32の動作状態(即ち、作動状態にあるか、又は、停止状態にあるか)を検出して、この検出された方向指示器32の動作状態を含めて車両のふらつき走行を検出するので、車線変更などの適切な車両操作をふらつき走行として誤検出してしまうことを防ぐことができる。
【0078】
また、カメラ25bによって車両の車内を撮像した撮像情報を車両状況情報として検出するので、ふらつき走行を検出したときの車内の様子を記録することができ、ふらつき走行の要因をより明確にすることができる。
【0079】
また、車両のふらつき走行が検出されたとき、該車両がふらつき走行していることを報知する警報を出力するので、運転者にふらつき走行の注意喚起をすることができ、安全性を向上できる。
【0080】
なお、本実施形態においては、ドライブレコーダ2に予め設けられたCPU21を用いて、上述した図4のフローチャートに示されるふらつき走行検出処理を実行するものであったが、これに限定されるものではなく、上記CPU21に接続されたサブCPUを設けて、このサブCPUに上記ふらつき走行検出処理を実行させる構成としてもよい。この場合、車両の車内を撮像するカメラを、このサブCPUに接続する構成としてもよい。
【0081】
なお、前述した実施形態は本発明の代表的な形態を示したに過ぎず、本発明は、実施形態に限定されるものではない。即ち、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。
【符号の説明】
【0082】
1 ドライブレコーダシステム
2 ドライブレコーダ
5 ドライブレコーダ解析ユニット
21 CPU(車両状況情報検出手段、走行位置検出手段、変化量算出手段、ふらつき走行検出手段、車両状況情報記録手段、方向指示器状態検出手段、ふらつき走行警報手段)
24 メモリ(感度情報記憶手段)
25b カメラ(車内撮像手段)
32 方向指示器
C カード(記憶媒体)
【特許請求の範囲】
【請求項1】
車両の車両状況を示す車両状況情報を検出する車両状況情報検出手段を備えるとともに、前記車両に生じた衝撃を検出したとき、該衝撃を検出した直前に前記車両状況情報検出手段によって検出された車両状況情報を記録するドライブレコーダにおいて、
前記車両が走行する車線内における前記車両の走行位置を周期的に検出する走行位置検出手段と、
前記走行位置検出手段によって検出された最新の走行位置とその直前の走行位置との変化量を算出する変化量算出手段と、
前記変化量算出手段によって算出された前記変化量が予め設定されたふらつき走行判定閾値を超えたときに前記車両のふらつき走行を検出するふらつき走行検出手段と、
前記ふらつき走行検出手段によって前記車両のふらつき走行が検出されたとき、前記最新の走行位置を検出した直前に前記車両状況情報検出手段によって検出された前記車両状況情報を記憶媒体に記録する車両状況情報記録手段と、を備えている
ことを特徴とするドライブレコーダ。
【請求項2】
車両のふらつき走行の検出感度を示す感度情報が記憶される感度情報記憶手段を備え、
前記ふらつき走行検出手段が、前記感度情報記憶手段に記憶された前記感度情報に応じて補正された前記ふらつき走行判定閾値を用いて前記車両のふらつき走行を検出する
ことを特徴とする請求項1に記載のドライブレコーダ。
【請求項3】
前記車両の方向指示器が作動状態又は停止状態にあることを検出する方向指示器状態検出手段を備え、
前記ふらつき走行検出手段が、前記変化量算出手段によって算出された前記変化量が予め設定されたふらつき走行判定閾値を超えるとともに、前記方向指示器状態検出手段によって前記方向指示器が停止状態にあることが検出されたときに、前記車両のふらつき走行を検出する
ことを特徴とする請求項1又は2に記載のドライブレコーダ。
【請求項4】
前記車両の車内を撮像する車内撮像手段を備え、
前記車両状況情報検出手段が、前記車内撮像手段によって撮像された撮像情報を前記車両状況情報として検出する
ことを特徴とする請求項1〜3のいずれか一項に記載のドライブレコーダ。
【請求項1】
車両の車両状況を示す車両状況情報を検出する車両状況情報検出手段を備えるとともに、前記車両に生じた衝撃を検出したとき、該衝撃を検出した直前に前記車両状況情報検出手段によって検出された車両状況情報を記録するドライブレコーダにおいて、
前記車両が走行する車線内における前記車両の走行位置を周期的に検出する走行位置検出手段と、
前記走行位置検出手段によって検出された最新の走行位置とその直前の走行位置との変化量を算出する変化量算出手段と、
前記変化量算出手段によって算出された前記変化量が予め設定されたふらつき走行判定閾値を超えたときに前記車両のふらつき走行を検出するふらつき走行検出手段と、
前記ふらつき走行検出手段によって前記車両のふらつき走行が検出されたとき、前記最新の走行位置を検出した直前に前記車両状況情報検出手段によって検出された前記車両状況情報を記憶媒体に記録する車両状況情報記録手段と、を備えている
ことを特徴とするドライブレコーダ。
【請求項2】
車両のふらつき走行の検出感度を示す感度情報が記憶される感度情報記憶手段を備え、
前記ふらつき走行検出手段が、前記感度情報記憶手段に記憶された前記感度情報に応じて補正された前記ふらつき走行判定閾値を用いて前記車両のふらつき走行を検出する
ことを特徴とする請求項1に記載のドライブレコーダ。
【請求項3】
前記車両の方向指示器が作動状態又は停止状態にあることを検出する方向指示器状態検出手段を備え、
前記ふらつき走行検出手段が、前記変化量算出手段によって算出された前記変化量が予め設定されたふらつき走行判定閾値を超えるとともに、前記方向指示器状態検出手段によって前記方向指示器が停止状態にあることが検出されたときに、前記車両のふらつき走行を検出する
ことを特徴とする請求項1又は2に記載のドライブレコーダ。
【請求項4】
前記車両の車内を撮像する車内撮像手段を備え、
前記車両状況情報検出手段が、前記車内撮像手段によって撮像された撮像情報を前記車両状況情報として検出する
ことを特徴とする請求項1〜3のいずれか一項に記載のドライブレコーダ。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−150573(P2011−150573A)
【公開日】平成23年8月4日(2011.8.4)
【国際特許分類】
【出願番号】特願2010−11850(P2010−11850)
【出願日】平成22年1月22日(2010.1.22)
【出願人】(000006895)矢崎総業株式会社 (7,019)
【Fターム(参考)】
【公開日】平成23年8月4日(2011.8.4)
【国際特許分類】
【出願日】平成22年1月22日(2010.1.22)
【出願人】(000006895)矢崎総業株式会社 (7,019)
【Fターム(参考)】
[ Back to top ]