
ドライブ装置およびカテーテルユニット
【課題】断線等の不具合の発生を防止することができるドライブ装置およびカテーテルユニットを提供すること。
【解決手段】カテーテルユニット100は、カテーテル2と、超音波振動子52を有するドライブシャフト3とを備えるカテーテル組立体1と、カテーテル組立体1が接続され、ドライブシャフト3を軸回りに回転させつつ、軸方向に移動させ、超音波振動子52により生体管腔内の画像を取り込む外部ユニット6とを備えている。外部ユニット6は、スキャナ装置61と、軸方向移動装置62と、ドライブシャフト3を軸方向先端側に移動させる際にドライブシャフト3から受ける荷重を検出するセンサと、安全処理を行う安全装置と、安全装置の作動を制御する制御部63とを備え、制御部63は、ドライブシャフト3を軸方向先端側に移動させる際に、センサの検出結果に応じて、安全装置を作動させる。
【解決手段】カテーテルユニット100は、カテーテル2と、超音波振動子52を有するドライブシャフト3とを備えるカテーテル組立体1と、カテーテル組立体1が接続され、ドライブシャフト3を軸回りに回転させつつ、軸方向に移動させ、超音波振動子52により生体管腔内の画像を取り込む外部ユニット6とを備えている。外部ユニット6は、スキャナ装置61と、軸方向移動装置62と、ドライブシャフト3を軸方向先端側に移動させる際にドライブシャフト3から受ける荷重を検出するセンサと、安全処理を行う安全装置と、安全装置の作動を制御する制御部63とを備え、制御部63は、ドライブシャフト3を軸方向先端側に移動させる際に、センサの検出結果に応じて、安全装置を作動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ドライブ装置およびカテーテルユニットに関するものである。
【背景技術】
【0002】
血管等の生体管腔内に挿入して、その生体管腔内を超音波により診断するのに用いられるカテーテルが知られている(例えば、特許文献1参照)。
【0003】
特許文献1に記載のカテーテルは、ルーメンを有するカテーテル本体と、カテーテル本体のルーメンに挿入され、先端部に超音波を発する超音波発振部を有するシャフトとを備えている。このカテーテルは、ドライブ装置に接続され、そのドライブ装置によりカテーテル本体のルーメン内に挿入されているシャフトをその軸回りに回転させるとともに基端方向に移動させて、血管壁の超音波画像を取得することができる。なお、超音波画像を取得する際には、ルーメン内、すなわち、カテーテル本体の内周面と、シャフトの外周面との間に形成された間隙に、例えば生理食塩水等の液体を充填して、その作業を行なう。
【0004】
また、前記血管壁の超音波画像を取得した後は、シャフトをその軸回りに回転させるとともに先端方向に移動させ、元の位置まで戻す。なお、シャフトを先端方向に移動さる際、シャフトを回転させない場合もある。
【0005】
しかしながら、このような従来のドライブ装置では、血管壁の超音波画像を取得した後、シャフトをその軸回りに回転させるとともに先端方向に移動させて元の位置まで戻す際、シャフトが撓み、信号線等が断線する虞がある。
【0006】
その原因としては、カテーテル本体が屈曲していることがあり、その場合は、カテーテル本体のルーメンと超音波発振部との間の摺動抵抗により、超音波発振部が先端方向に移動し難くなり、その状態でシャフトを先端方向に移動させようとすると、シャフトが撓み、そのシャフトが渦巻き状や、とぐろを巻いたような状態となる。その結果、シャフトは、その基端側では回転するものの、先端側では回転が阻害され、信号線が断線する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第3954888号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明の目的は、断線等の不具合の発生を防止することができるドライブ装置およびカテーテルユニットを提供することにある。
【課題を解決するための手段】
【0009】
このような目的は、下記(1)〜(8)の本発明により達成される。
(1) 可撓性を有するカテーテル本体を備えるカテーテルと、先端側に生体管腔内の画像を取り込む画像取込部を有し、前記カテーテル内に回転可能に挿入されたドライブシャフトとを備えるカテーテル組立体が接続され、前記ドライブシャフトをその軸回りに回転させつつ、前記軸方向に移動させ、前記画像取込部により生体管腔内の画像を取り込むドライブ装置であって、
前記ドライブシャフトをその軸回りに回転させる回転手段と、
前記ドライブシャフトをその軸方向に移動させるスライド機構と、
前記ドライブシャフトをその軸方向先端側に移動させる際に該ドライブシャフトから受ける荷重を検出する荷重検出手段と、
安全処理を行う安全装置と、
前記安全装置の作動を制御する制御手段とを備え、
前記制御手段は、前記ドライブシャフトをその軸方向先端側に移動させる際に、前記荷重検出手段の検出結果に応じて、前記安全装置を作動させるよう構成されていることを特徴とするドライブ装置。
【0010】
(2) 前記制御手段は、前記ドライブシャフトをその軸方向先端側に移動させる際に、前記荷重検出手段により検出された荷重が閾値を超えた場合に、前記安全装置を作動させ、該安全装置により安全処理を行う上記(1)に記載のドライブ装置。
【0011】
(3) 前記安全装置は、前記ドライブシャフトの移動を停止させるかまたは移動速度を減速させるものである上記(1)または(2)に記載のドライブ装置。
【0012】
(4) 前記スライド機構は、モータを有し、該モータの駆動により前記ドライブシャフトをその軸方向先端側に移動させるよう構成されており、
前記安全装置は、前記モータの駆動を停止させるかまたは前記モータの駆動速度を減速させるものである上記(1)または(2)に記載のドライブ装置。
【0013】
(5) 前記安全装置は、警告情報を報知するものである上記(1)ないし(4)のいずれかに記載のドライブ装置。
【0014】
(6) 前記回転手段は、モータを有し、前記ドライブシャフトをその軸方向先端側に移動させる際に、該モータの駆動により前記ドライブシャフトをその軸回りに回転させるよう構成されており、
前記安全装置は、前記ドライブシャフトの回転を停止させるかまたは回転速度を減速させるものである上記(1)ないし(5)のいずれかに記載のドライブ装置。
【0015】
(7) 前記制御手段は、前記ドライブシャフトをその軸方向先端側に移動させる際に、前記荷重検出手段により検出された荷重が閾値を超えた場合に、前記安全装置により前記ドライブシャフトの移動速度を減速させ、再度、前記荷重検出手段により前記荷重を検出し、該検出された荷重が閾値を超えている場合に、前記安全装置により前記ドライブシャフトの移動速度をさらに減速させる上記(1)に記載のドライブ装置。
【0016】
(8) 可撓性を有するカテーテル本体を備えるカテーテルと、先端側に生体管腔内の画像を取り込む画像取込部を有し、前記カテーテル内に回転可能に挿入されたドライブシャフトとを備えるカテーテル組立体と、
上記(1)ないし(7)のいずれかに記載のドライブ装置とを備えることを特徴とするカテーテルユニット。
【発明の効果】
【0017】
本発明によれば、荷重検出手段の検出結果に応じて、安全装置を作動させ、例えば、ドライブシャフトの移動の停止、ドライブシャフトの移動速度の減速、ドライブシャフトの回転の停止、ドライブシャフトの回転速度減速、警告情報の報知等を行うことにより、断線等の不具合の発生を防止することができる。
【図面の簡単な説明】
【0018】
【図1】本発明のカテーテルユニットの第1実施形態を示す図である。
【図2】本発明のカテーテルユニットの第1実施形態を示す図である。
【図3】図1に示すカテーテルユニットの外部ユニットのスキャナ装置の断面図である。
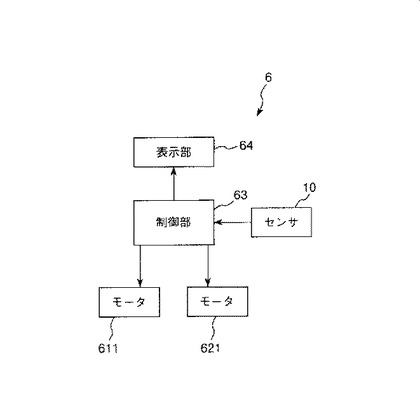
【図4】図1に示すカテーテルユニットの外部ユニットのブロック図である。
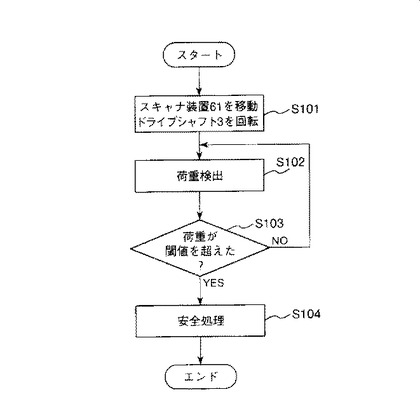
【図5】図1に示すカテーテルユニットの外部ユニットの制御部の制御動作を示すフローチャートである。
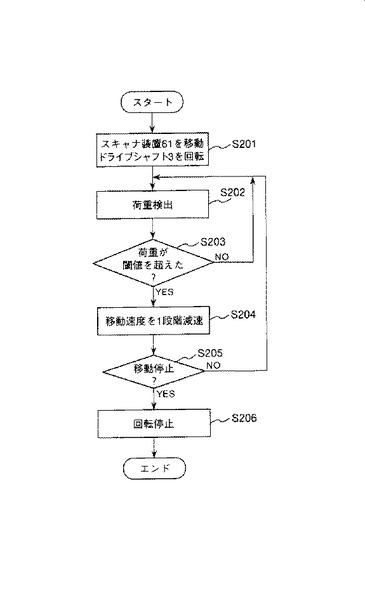
【図6】本発明のカテーテルユニットの第2実施形態における外部ユニットの制御部の制御動作を示すフローチャートである。
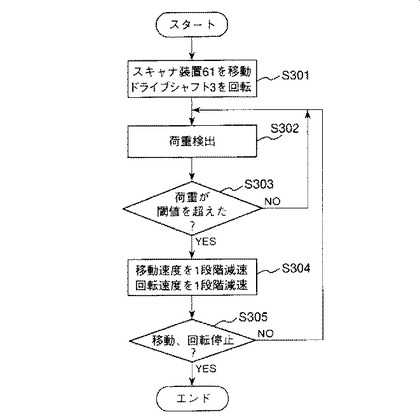
【図7】本発明のカテーテルユニットの第3実施形態における外部ユニットの制御部の制御動作を示すフローチャートである。
【発明を実施するための形態】
【0019】
以下、本発明のドライブ装置およびカテーテルユニットを添付図面に示す好適な実施形態に基づいて詳細に説明する。
【0020】
<第1実施形態>
図1および図2は、それぞれ本発明のカテーテルユニットの第1実施形態を示す図、図3は、図1に示すカテーテルユニットの外部ユニットのスキャナ装置の断面図、図4は、図1に示すカテーテルユニットの外部ユニットのブロック図、図5は、図1に示すカテーテルユニットの外部ユニットの制御部の制御動作を示すフローチャートである。
【0021】
なお、以下では、図1、図2および図3中の左側を「先端」、右側を「基端」、上側を「上」、下側を「下」として説明を行う。
【0022】
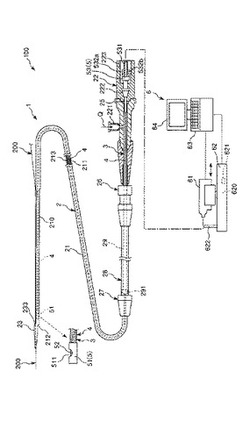
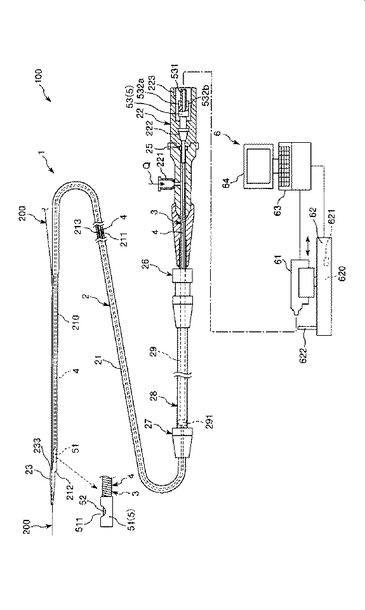
図1に示すように、カテーテルユニット100は、外部ユニット(ドライブ装置)6と、カテーテル組立体1とを備えている。
【0023】
カテーテル組立体1は、カテーテル2と、カテーテル2内に挿入されるドライブシャフト3とを備えている。このカテーテル組立体1は、カテーテル2とドライブシャフト3とを組み立てた組立状態で、生体管腔(以下では「血管」を代表的に扱う)内に挿入して用いられ、その内部画像である血管壁の画像を取得するものである。なお、前記組立状態では、ドライブシャフト3は、カテーテル2内にその軸回りに回転可能でかつその軸方向に移動可能に挿入されている。
【0024】
また、カテーテル組立体1は、外部ユニット6に接続して用いられる。外部ユニット6は、駆動源であるモータ611を内蔵するスキャナ装置61と、スキャナ装置61を支持し、駆動源であるモータ621を内蔵し、そのモータ621の駆動によりスキャナ装置61を水平方向(軸方向)へ移動させる軸方向移動装置62と、制御部(制御手段)63と、表示部64とを有している。
【0025】
スキャナ装置61には、カテーテル組立体1の基端部が着脱自在に接続される。このスキャナ装置61は、ドライブシャフト3をその軸回りに回転させることができるように構成されている。
【0026】
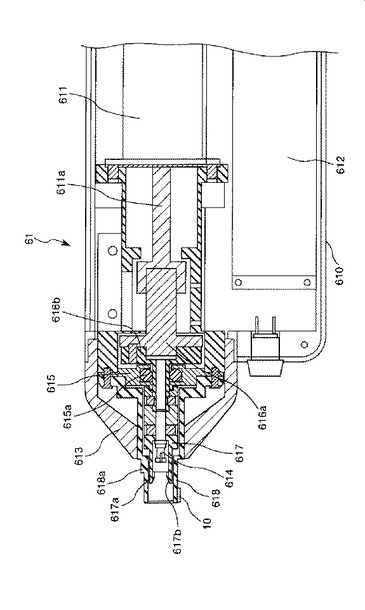
図3に示すように、スキャナ装置61は、ハウジング610と、このハウジング610内に収納されたモータ611、モータ611および制御部63と電気的に接続される回路基板612、モータ611の回転軸611aに第1の連結部材616aと第2の連結部材616bを介して固定された回転子617、スペーサ615、スペーサ615内に収納されたベアリング615a、回転子617を被包する回転子カバー618、回転子カバー618を被包するキャップ613、回転子617内に固定され、ドライブシャフト3の後述するコネクタ部53のコネクタ531と係合するプラグ614とを備えている。プラグ614と回路基板612とは、電気的に接続されている。また、スペーサ615およびベアリング615aにより、回転子617は円滑に回転する。
【0027】
なお、回転子カバー618は、カテーテル2の後述するコネクタ部22が接続される接続部を構成している。また、モータ611、回路基板612、回転軸611a、第1の連結部材616a、第2の連結部材616bおよび回転子617により、ドライブシャフトをその軸回りに回転させる回転手段が構成される。
【0028】
回転子カバー618は、筒状をなしている。この回転子カバー618は、キャップ613よりも先端方向に突出しており、回転子カバー618のうちのキャップ613よりも先端方向に突出している部位が、カテーテル2のコネクタ部22との接続部を構成している。また、回転子カバー618のうちのキャップ613よりも先端方向に突出している部位の基端部の外周面には、コネクタ部22の後述する溝223内に挿入される突起618aが形成されている。この突起618aは、回転子カバー618の軸方向に沿って延在している。
【0029】
また、スキャナ装置61の回転子617の先端部には、略三角形をなす先端部を有する2つの突起617a、617bが先端方向に突出するように形成されている。各突起617a、617bは、互いに対向するように配置されている。
【0030】
また、回転子カバー618の外径は、コネクタ部22の内径と略等しく、もしくは若干小さく設定されている。
【0031】
コネクタ部22がスキャナ装置61の回転子カバー618に接続されたときに、後述するコネクタ部22の溝223と、この溝223内に挿入された回転子カバー618の突起618aとの係合により、カテーテル2の回転が防止される。
【0032】
また、コネクタ部22がスキャナ装置61の回転子カバー618に接続されたときに、後述するコネクタ部53の2つの溝532a、532bと、この2つの溝532a、532b内に挿入された2つの突起617a、617bとの係合により、スキャナ装置61からドライブシャフト3に回転力が伝達可能となる。
【0033】
また、コネクタ部22がスキャナ装置61の回転子カバー618に接続されたときに、後述するコネクタ部53のコネクタ531がスキャナ装置61のプラグ614に電気的および機械的に接続される。
【0034】
軸方向移動装置62は、スキャナ装置61を支持し、そのスキャナ装置61およびカテーテル組立体1をドライブシャフト3の軸方向に移動させることができるように構成されている。この軸方向移動装置62は、モータ621およびその駆動回路と、モータ621の回転力をドライブシャフト3の軸方向の駆動力に変換してそのドライブシャフト3に伝達する動力伝達機構とを有している。なお、モータ621、駆動回路および動力伝達機構により、ドライブシャフト3をその軸方向に移動させるスライド機構620が構成される。このスライド機構620の動力伝達機構としては、例えば、ボールネジ等を用いることができる。
【0035】
また、軸方向移動装置62の先端側には、カテーテル2の後述するユニットコネクタ26を、そのユニットコネクタ26が軸方向に移動しないように支持する支持部622が設けられている。
【0036】
これにより、外部ユニット6は、ドライブシャフト3をその軸回りに回転させつつ、軸方向に移動させ、ドライブシャフト3の超音波振動子(画像取込部)52を走査することができる。また、外部ユニット6は、スキャナ装置61を介して送られたドライブシャフト3から得られる情報に基づいて血管壁の画像を形成することができる。これにより、血管に対して任意の位置で、その周方向全周にわたって、超音波画像である血管内の横断面像が得られる。
【0037】
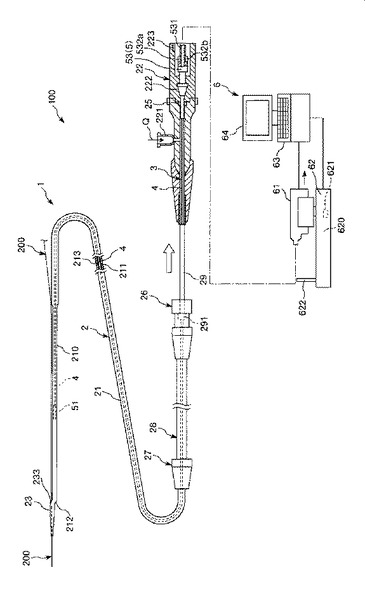
なお、このカテーテルユニット100では、ドライブシャフト3をその軸回りに回転させつつ、カテーテルはその軸方向に移動させずに、ドライブシャフト3をその軸方向基端側に移動させて超音波振動子52を走査し、その超音波振動子52により血管壁の画像を取り込む。そして、その画像の取り込みが終了すると、ドライブシャフト3をその軸回りに回転させつつ、カテーテルはその軸方向に移動させずに、ドライブシャフト3をその軸方向先端側に移動させ、元の位置まで戻す。
【0038】
また、スキャナ装置61内には、ドライブシャフト3をその軸方向先端側に移動させる際にドライブシャフト3から受ける荷重を検出するセンサ(荷重検出手段)10が設置されている。このセンサ10の位置は、前記荷重を検出し得る位置であれば特に限定されないが、本実施形態では、センサ10は、回転子カバー618の外周面に設置されている。なお、センサ10がドライブシャフト3から受ける荷重は、ドライブシャフト3をその軸方向先端側に移動させる際にドライブシャフト3に加わる荷重に相当する。そして、このセンサ10の検出結果は、制御部63に送信され、制御部63は、その検出結果に基づいて、安全処理を実行するか否かを判断する。
【0039】
制御部63は、例えばCPU(Central Processing Unit)や、メモリ等を内蔵したパーソナルコンピュータ等で構成されている。この制御部63は、前記安全処理を実行するか否かの判断を含め、スキャナ装置61、軸方向移動装置62、表示部64の作動等、外部ユニット6全体の制御を行う。
【0040】
表示部64は、例えば液晶表示装置等で構成されている。この表示部64には、カテーテル組立体1によって得られた血管壁の画像や、各種の情報が表示される。
【0041】
前述したように、制御部63は、ドライブシャフト3をその軸方向先端側に移動させる際に、センサ10の検出結果に応じて、安全処理を行う安全装置を作動させるように構成されている。すなわち、制御部63は、センサ10により検出された荷重が、許容範囲の上限値である閾値を超えた場合は、安全装置を作動させ、その安全装置により安全処理を行う。
【0042】
前記閾値は、特に限定されず、諸条件に応じて適宜決定されるものであるが、例えば、15〜30N程度の範囲内で設定されることが好ましく、15〜20N程度の範囲内で設定されることがより好ましい。
【0043】
また、前記安全処理を行う安全装置の構成例としては、例えば、下記構成例(1)〜(3)が挙げられる。
【0044】
(1)
構成例1の安全装置は、ドライブシャフト3の移動を停止させるかまたは移動速度を減速させるものである。具体的には、例えば、モータ621の駆動を停止させるかまたはモータ621の駆動速度を減速させるもの、すなわち、モータ621およびその駆動回路等が挙げられる。なお、モータ621の駆動の停止、駆動速度の減速には、それぞれ、電気制動を用いることが好ましい。
【0045】
(2)
構成例2の安全装置は、警告情報を報知するものである。具体的には、例えば、警告情報を表示するように構成された表示部64、ランプ(図示せず)、音声を発生する音声発生部(図示せず)、ブザー(図示せず)等が挙げられる。なお、表示部64で表示する警告情報としては、例えば、検出した荷重が閾値を超えたこと、軸方向移動装置62によるスキャナ装置61の移動やドライブシャフト3の回転を停止すべきこと等が挙げられる。
【0046】
(3)
構成例3の安全装置は、ドライブシャフト3の回転を停止させるかまたは回転速度を減速させるものである。具体的には、例えば、モータ611の駆動を停止させるかまたはモータ611の駆動速度を減速させるもの、すなわち、モータ611およびその駆動回路等が挙げられる。なお、モータ611の駆動の停止、駆動速度の減速には、それぞれ、電気制動を用いることが好ましい。
【0047】
前記安全装置により安全処理を行うことにより、後述する超音波振動子52等に接続されている信号線の断線等の不具合の発生を防止することができる。
【0048】
なお、安全装置としては、前記(1)〜(3)のうちの任意の2つで構成されていることが好ましく、3つで構成されていることがより好ましい。これにより、各効果が組み合わされ、より確実に断線等の不具合の発生を防止することができる。
【0049】
次に、カテーテル組立体1について説明する。
前述したように、カテーテル組立体1は、カテーテル2とドライブシャフト3とを備えている。
【0050】
カテーテル2は、可撓性を有する長尺状のカテーテル本体21と、カテーテル本体21の基端部に設けられた、中継コネクタ27、外管28、内管29、ユニットコネクタ26およびコネクタ部22とを備えている。
【0051】
カテーテル本体21には、ドライブシャフト3が挿入されるセンサルーメン211と、ガイドワイヤ200が挿入されるガイドワイヤルーメン233とがカテーテル本体21の長手方向に沿って形成されている。また、カテーテル本体21の先端部は、外径が縮径した縮径部となっている。
【0052】
センサルーメン211は、ドライブシャフト3が挿入可能であり、カテーテル本体21の全長に亘って形成されている。なお、カテーテル本体21のうちのセンサルーメン211が設けられている部位は、ドライブシャフト3が挿入可能なドライブシャフト挿入部210を構成する。
【0053】
また、ガイドワイヤルーメン233は、ガイドワイヤ200が挿通可能であり、本実施形態では、カテーテル本体21の先端部のみに形成されている。なお、カテーテル本体21のうちのガイドワイヤルーメン233が設けられている部位は、ガイドワイヤ200が挿通可能なガイドワイヤ挿通部23を構成する。
【0054】
センサルーメン211内には、ドライブシャフト3が挿入された状態、すなわち挿入状態で、液体Qが充填される。液体Qが充填されることにより、超音波振動子52からの超音波が血管壁にまで伝達して、当該血管壁から再度超音波振動子52にまで戻ってくることができる。これにより、超音波画像を確実に取得することができる。なお、液体Qとしては、特に限定されないが、例えば、生理食塩水、造影剤等が挙げられる。
【0055】
また、センサルーメン211は、カテーテル本体21の先端に開口した開口部212を有している。センサルーメン211に充填された液体Qは、開口部212を介して排出される。これにより、たとえ液体Qを過剰に充填したとしても、それによるカテーテル本体21の破損を確実に防止することができる。
【0056】
なお、開口部212は、図1に示す構成ではカテーテル本体21の中心軸に対して傾斜した方向に向かって開口しているが、これに限定されず、例えば、カテーテル本体21の中心軸方向、すなわち、先端方向に向かって開口していてもよい。
【0057】
カテーテル本体21は、その先端部に、ガイドワイヤ200が挿通可能な前記ガイドワイヤ挿通部23を有している。ガイドワイヤ挿通部23は、両端がそれぞれ開口した管状をなしており、そのガイドワイヤ挿通部23の内腔によりガイドワイヤルーメン233が構成される。カテーテル2は、ガイドワイヤ挿通部23のガイドワイヤルーメン233にガイドワイヤ200を挿通した状態で血管内に挿入されるものであり、ガイドワイヤ200の抜き差しを迅速に行なうことができる、いわゆる「ラピッドエクスチェンジタイプ(ショートモノレールタイプ)」のカテーテルである。
【0058】
ガイドワイヤ挿通部23は、図1に示す構成ではカテーテル本体21の中心軸と平行に配置されているが、これに限定されず、例えば、カテーテル本体21の中心軸に対して傾斜して配置されていてもよい。
【0059】
また、ガイドワイヤ挿通部23の長手方向の途中には、図示しないコイルが埋設されている。このコイルは、X線透視下でカテーテル2の先端部の位置を視認するための造影マーカとして機能するものである。なお、コイルは、X線不透過性を有する例えばプラチナのような金属材料で構成されている。
【0060】
カテーテル本体21は、可撓性を有する材料で構成され、その材料としては、特に限定されず、例えば、スチレン系、ポリオレフィン系、ポリウレタン系、ポリエステル系、ポリアミド系、ポリイミド系、ポリブタジエン系、トランスポリイソプレン系、フッ素ゴム系、塩素化ポリエチレン系等の各種熱可塑性エラストマー等の熱可塑性樹脂が挙げられ、これらのうちの1種または2種以上を組合せたもの(ポリマーアロイ、ポリマーブレンド、積層体等)を用いることができる。
【0061】
また、カテーテル本体21は、その管壁が単層のものであってもよいし、複数の層が積層された積層体であってもよい。
【0062】
カテーテル本体21の基端部に設けられた中継コネクタ27、外管28、内管29、ユニットコネクタ26およびコネクタ部22は、それぞれ、硬質の管体で構成されたものである。
【0063】
コネクタ部22は、外部ユニット6のスキャナ装置61に接続される。すなわち、コネクタ部22の基端部には、スキャナ装置61の回転子カバー618が嵌入され、これにより、コネクタ部22の基端部に、回転子カバー618が接続される。
【0064】
コネクタ部22の基端部の内周面には、回転子カバー618の突起618aが挿入される溝223が形成されている。この溝223は、コネクタ部22の長手方向に沿って延在している。
【0065】
コネクタ部22の長手方向の途中には、その部分から分岐した液体注入ポート221が突出形成されている。例えばシリンジを用いて液体注入ポート221から液体Qを注入することができる。そして、注入された液体Qは、カテーテル本体21のセンサルーメン211に充填されることとなる。
【0066】
コネクタ部22の基端部には、ドライブシャフト3を回動可能に支持する回動支持部222が設けられている。
【0067】
また、コネクタ部22の基端部には、回動支持部222よりも先端側に、シール部材25が設置されている。シール部材25は、形状がリング状をなす弾性体で構成されている。これにより、シール部材25がコネクタ部22の内周部とドライブシャフト3の外周部と間に間隙が生じるのを防止することができ、すなわち、液密性が保持され、よって、液体Qが基端方向に向かって漏出するのを防止することができる。
【0068】
コネクタ部22の先端部には、内管29の基端部が固定されている。内管29は、その先端にストッパ291を有している。
【0069】
また、ユニットコネクタ26と中継コネクタ27とは、外管28を介して接続されている。すなわち、外管28の先端部には、中継コネクタ27の基端部が固定され、外管28の基端部には、ユニットコネクタ26の先端部が固定されている。
【0070】
そして、内管29は、ユニットコネクタ26および外管28内に挿入されており、ユニットコネクタ26、中継コネクタ27および外管28に対し、その軸方向に移動可能に接続されている。
【0071】
また、中継コネクタ27の先端部には、カテーテル本体21の基端部が固定されている。
【0072】
なお、コネクタ部22の内管29に対する固定方法、中継コネクタ27のカテーテル本体21に対する固定方法としては、それぞれ、特に限定されず、例えば、接着(接着剤や溶媒による接着)による方法、融着(熱融着、高周波融着、超音波融着等)による方法等が挙げられる。
【0073】
コネクタ部22は、ドライブシャフト3の後述するコネクタ部53および内管29を保持する。軸方向移動装置62の支持部622によりユニットコネクタ26が支持され、コネクタ部22がスキャナ装置61の回転子カバー618に接続された状態において、軸方向移動装置62の作動により、スキャナ装置61が移動し、これにより、内管29がユニットコネクタ26および外管28に押し込まれ、またはユニットコネクタ26および外管28から引き出されることによって、ドライブシャフト3の後述するシャフト4が連動してカテーテル本体21内を軸方向に移動する。
【0074】
図1に示すように、内管29を最も押し込んだときには、内管29は、そのカテーテル本体21側の端部が外管28のカテーテル本体21側端部付近、すなわち、中継コネクタ27付近まで到達する。そして、この状態では、ドライブシャフト3の超音波振動子52は、カテーテル本体21の先端付近に位置する。
【0075】
また、図2に示すように、内管29を最も引き出したときには、内管29のストッパ291がユニットコネクタ26の内壁に引っかかり、内管29の先端付近以外が露出する。そして、この状態では、ドライブシャフト3の超音波振動子52は、前記カテーテル本体21の先端付近から基端方向に所定距離離間した位置に位置する。超音波振動子52が、図1に示す位置から図2に示す位置まで回転しながら移動することによって、血管および脈管などの断層画像を作成することができる。
【0076】
コネクタ部22、ユニットコネクタ26、中継コネクタ27、外管28および内管29の構成材料としては、それぞれ、特に限定されず、例えば、ポリ塩化ビニル、ポリエチレン、ポリプロピレン、環状ポリオレフィン、ポリスチレン、ポリ−(4−メチルペンテン−1)、ポリカーボネート、アクリル樹脂、アクリルニトリル−ブタジエン−スチレン共重合体、ポリエチレンテレフタレート、ポリエチレンナフタレート等のポリエステル、ブタジエン−スチレン共重合体、ポリアミド(例えば、ナイロン6、ナイロン6・6、ナイロン6・10、ナイロン12)のような各種樹脂が挙げられる。
【0077】
なお、コネクタ部22は、図1に示す構成では3つの管体を長手方向に沿って連結したものであるが、これに限定されず、例えば、1つの管体で構成されたものであってもよい。
【0078】
このようなカテーテル2のカテーテル本体21のセンサルーメン211には、ドライブシャフト3が挿入される。そして、この挿入状態のドライブシャフト3は、その中心軸回りにスキャナ装置61の作動によって回転する。
【0079】
ドライブシャフト3は、その本体となる長尺状のシャフト4と、シャフト4の先端部に固定されたハウジング51と、ハウジング51内に収納された超音波振動子52と、シャフト4の基端部に固定されたコネクタ部53とを有している。また、ドライブシャフト3では、ハウジング51、超音波振動子52、コネクタ部53が、血管壁の画像を撮像する撮像手段5を構成している。
【0080】
シャフト4は、スキャナ装置61の作動による回転力を超音波振動子52まで確実に伝達可能なトルク伝達性を有するものである。このシャフト4は、例えば、ステンレス鋼等のような金属線を密巻きにコイル状に巻回して形成されている。なお、この金属線は、多重に巻回されていてもよい。
【0081】
このシャフト4の外径は、センサルーメン211の直径よりも小さい。これにより、シャフト4の外周面とカテーテル本体21の内周面との間には、間隙213が形成される。カテーテル2の液体注入ポート221から注入された液体Qは、間隙213を流下して、開口部212から排出される。
【0082】
シャフト4の先端部には、ハウジング51が例えば接着剤により固定されている。ハウジング51は、ステンレス鋼等の金属製の円筒体で構成され、その壁部を貫通する貫通孔511が形成されている。貫通孔511からは、超音波振動子52が露出している。なお、ハウジング51の直径は、シャフト4の外径とほぼ同じかまたはそれよりも若干大きい。
【0083】
超音波振動子52は、その重心がシャフト4の中心軸上に位置するように、ハウジング51内で固定されている。これにより、超音波振動子52は、シャフト4とともに回転することができる。超音波振動子52は、平面視で矩形または円形状をなし、PZT(チタン酸ジルコン酸鉛)で構成された圧電体の両面に、電極を蒸着や印刷等により形成したものである。これにより、血管壁に臨んだ状態で、超音波振動子52から超音波を発することができるとともに、その超音波の血管壁での反射波を受けることができる、すなわち、超音波の送受信を行なうことができる。この送受信により、血管壁の画像を取り込むことができる。この画像は、超音波振動子52から超音波を発信し、その反射波が再度超音波振動子52に返ってくるまでの時間から血管壁までの距離を測定し、当該血管壁の状態を可視化したものである。
【0084】
また、超音波振動子52からは、複数の信号線(図示せず)がシャフト4内を挿通し、コネクタ部53、すなわち後述するコネクタ531と電気的に接続されている。
【0085】
コネクタ部53は、その基端に、スキャナ装置61のプラグ614に電気的および機械的に接続されるコネクタ531を有している。
【0086】
また、コネクタ部53の基端部の外周面には、スキャナ装置61の回転子617の2つの突起617a、617bが挿入される2つの溝532a、532bが形成されている。各溝532a、532bは、互いに対向するように配置され、軸方向に沿って延在している。
【0087】
コネクタ部53は、スキャナ装置61に接続され、当該スキャナ装置61からの回転力を直接的に受けることができる。このコネクタ部53は、銅等のような導電性を有する金属製の筒体で構成されている。これにより、コネクタ部53をスキャナ装置61と電気的に接続することもでき、超音波振動子52からの信号をスキャナ装置61を介して、表示部64に送信することができる。そして、血管壁の画像が表示部64に表示される。
【0088】
次に、血管壁の画像を取り込みが終了した後、ドライブシャフト3をその軸回りに回転させるとともに、その軸方向先端側に移動させ、元の位置まで戻す際の外部ユニット6の制御部63の制御動作について説明する。
【0089】
図5に示すうように、まず、軸方向移動装置62により、スキャナ装置61を先端方向に移動させるとともに、スキャナ装置61により、ドライブシャフト3をその軸回りに回転させる(ステップS101)。これにより、ドライブシャフト3は、回転しつつ、先端方向に移動する。また、このドライブシャフト3の移動は、安全処理における移動停止処理が行われない場合は、ドライブシャフト3が目的量だけ移動するまで行われるが、この動作についての図5のフローチャートへの記載および説明は、省略する。また、ドライブシャフト3の回転は、安全処理における回転停止処理が行われない場合は、ドライブシャフト3が目的量だけ移動するまで行われるが、この動作についての図5のフローチャートへの記載および説明は、省略する。
【0090】
次いで、センサ10により、ドライブシャフト3から受ける荷重を検出し(ステップS102)、その検出した荷重が、閾値を超えたか否かを判断する(ステップS103)。
【0091】
ステップS103において、検出した荷重が閾値を超えていないと判断した場合は、ステップS102に戻り、再度、ステップS102以降を実行する。
【0092】
また、ステップS103において、検出した荷重が閾値を超えたと判断した場合は、安全装置により安全処理を行う(ステップS104)。この安全処理としては、前述したように、ドライブシャフト3の移動を停止させるかまたは移動速度を減速させる処理、ドライブシャフト3の回転を停止させるかまたは回転速度を減速させる処理、警告情報を報知する処理等の少なくとも1つを行う。なお、安全処理として、前記のすべてを行うこと、すなわち、ドライブシャフト3の移動および回転を停止させ、かつ警告情報を報知することが好ましい。
【0093】
以上説明したように、このカテーテルユニット100によれば、センサ10の検出結果に応じて、安全装置を作動させることにより、信号線の断線等の不具合の発生を防止することができる。
【0094】
なお、本実施形態では、ドライブシャフト3をその軸回りに回転させるとともに、ドライブシャフト3を軸方向先端側に移動させるが、ドライブシャフト3を回転させずに、ドライブシャフト3を軸方向先端側に移動させてもよい。
【0095】
<第2実施形態>
図6は、本発明のカテーテルユニットの第2実施形態における外部ユニットの制御部の制御動作を示すフローチャートである。
【0096】
以下、第2実施形態について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
【0097】
第2実施形態のカテーテルユニット100の外部ユニット(ドライブ装置)6では、制御部63は、ドライブシャフト3をその軸方向先端側に移動させる際に、センサ10によりドライブシャフト3から受ける荷重を検出し、検出された荷重が閾値を超えた場合に、安全装置によりドライブシャフト3の移動速度を減速させ、再度、センサ10により前記荷重を検出し、検出された荷重が閾値を超えている場合に、安全装置によりドライブシャフト3の移動速度をさらに減速させる。すなわち、センサ10により検出された荷重が閾値よりも小さくなるまで、ドライブシャフト3の移動速度を段階的に減速させる。これにより、センサ10により検出された荷重が閾値を超えるような不具合が発生した場合に、途中でその不具合が解消し、問題なくドライブシャフト3をその軸方向先端側に移動させることができるようになることが期待できる。
【0098】
なお、センサ10により検出された荷重が閾値を超えたままである場合は、最終的には、ドライブシャフト3の移動が停止する。そして、ドライブシャフト3の移動を停止させる際は、ドライブシャフト3の回転を停止させる。また、警告情報の報知も行うことが好ましい。
【0099】
次に、血管壁の画像を取り込みが終了した後、ドライブシャフト3をその軸回りに回転させるとともに、その軸方向先端側に移動させ、元の位置まで戻す際の外部ユニット6の制御部63の制御動作について説明する。
【0100】
図6に示すうように、まず、軸方向移動装置62により、スキャナ装置61を先端方向に移動させるとともに、スキャナ装置61により、ドライブシャフト3をその軸回りに回転させる(ステップS201)。これにより、ドライブシャフト3は、回転しつつ、先端方向に移動する。また、このドライブシャフト3の移動は、安全処理による移動速度の減速処理で移動を停止しない場合は、ドライブシャフト3が目的量だけ移動するまで行われるが、この動作についての図6のフローチャートへの記載および説明は、省略する。また、ドライブシャフト3の回転は、安全処理による移動速度の減速処理で移動を停止しない場合は、ドライブシャフト3が目的量だけ移動するまで行われるが、この動作についての図6のフローチャートへの記載および説明は、省略する。
【0101】
次いで、センサ10により、ドライブシャフト3から受ける荷重を検出し(ステップS202)、その検出した荷重が、閾値を超えたか否かを判断する(ステップS203)。
【0102】
ステップS203において、検出した荷重が閾値を超えていないと判断した場合は、ステップS202に戻り、再度、ステップS202以降を実行する。
【0103】
また、ステップS203において、検出した荷重が閾値を超えたと判断した場合は、安全装置による安全処理、すなわち、ドライブシャフト3の移動速度を1段階減速させる(ステップS204)。
【0104】
次いで、ドライブシャフト3の移動が停止したか否かを判断する(ステップS205)。
【0105】
ステップS205において、ドライブシャフト3の移動が停止していないと判断した場合は、ステップS202に戻り、再度、ステップS202以降を実行する。このステップS202〜S205のルーチンを実行することにより、途中で不具合が解消し、問題なくドライブシャフト3をその軸方向先端側に移動させることができるようになることが期待できる。
【0106】
また、ステップS205において、ドライブシャフト3の移動が停止したと判断した場合は、ドライブシャフト3の回転を停止する(ステップS206)。
【0107】
なお、図示しないが、ステップS203において、検出した荷重が閾値を超えたと判断した場合は、さらに、警告情報を報知することが好ましい。
【0108】
以上説明したように、このカテーテルユニット100によれば、前述した第1実施形態と同様の効果が得られる。
【0109】
なお、本実施形態では、ドライブシャフト3の移動速度を段階的に減速させているが、これに限らず、例えば、ドライブシャフト3の回転速度を段階的に減速させてもよい。
【0110】
<第3実施形態>
図7は、本発明のカテーテルユニットの第3実施形態における外部ユニットの制御部の制御動作を示すフローチャートである。
【0111】
以下、第3実施形態について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
【0112】
第3実施形態のカテーテルユニット100の外部ユニット(ドライブ装置)6では、制御部63は、ドライブシャフト3をその軸方向先端側に移動させる際に、センサ10によりドライブシャフト3から受ける荷重を検出し、検出された荷重が閾値を超えた場合に、安全装置によりドライブシャフト3の移動速度および回転速度をそれぞれ減速させ、再度、センサ10により前記荷重を検出し、検出された荷重が閾値を超えている場合に、安全装置によりドライブシャフト3の移動速度および回転速度をそれぞれさらに減速させる。すなわち、センサ10により検出された荷重が閾値よりも小さくなるまで、ドライブシャフト3の移動速度および回転速度をそれぞれ段階的に減速させる。これにより、センサ10により検出された荷重が閾値を超えるような不具合が発生した場合に、途中でその不具合が解消し、問題なくドライブシャフト3をその軸方向先端側に移動させることができるようになることが期待できる。
【0113】
なお、センサ10により検出された荷重が閾値を超えた場合に、警告情報の報知も行うことが好ましい。
【0114】
次に、血管壁の画像を取り込みが終了した後、ドライブシャフト3をその軸回りに回転させるとともに、その軸方向先端側に移動させ、元の位置まで戻す際の外部ユニット6の制御部63の制御動作について説明する。
【0115】
図7に示すうように、まず、軸方向移動装置62により、スキャナ装置61を先端方向に移動させるとともに、スキャナ装置61により、ドライブシャフト3をその軸回りに回転させる(ステップS301)。これにより、ドライブシャフト3は、回転しつつ、先端方向に移動する。また、このドライブシャフト3の移動は、安全処理による移動速度の減速処理で移動を停止しない場合は、ドライブシャフト3が目的量だけ移動するまで行われるが、この動作についての図7のフローチャートへの記載および説明は、省略する。また、ドライブシャフト3の回転は、安全処理による回転移動速度の減速処理で回転を停止しない場合は、ドライブシャフト3が目的量だけ移動するまで行われるが、この動作についての図7のフローチャートへの記載および説明は、省略する。
【0116】
次いで、センサ10により、ドライブシャフト3から受ける荷重を検出し(ステップS302)、その検出した荷重が、閾値を超えたか否かを判断する(ステップS303)。
【0117】
ステップS303において、検出した荷重が閾値を超えていないと判断した場合は、ステップS302に戻り、再度、ステップS302以降を実行する。
【0118】
また、ステップS303において、検出した荷重が閾値を超えたと判断した場合は、安全装置による安全処理、すなわち、ドライブシャフト3の移動速度および回転速度をそれぞれ1段階減速させる(ステップS304)。
【0119】
次いで、ドライブシャフト3の移動および回転が停止したか否かを判断する(ステップS305)。
【0120】
ステップS305において、ドライブシャフト3の移動および回転が停止していないと判断した場合は、ステップS302に戻り、再度、ステップS302以降を実行する。このステップS302〜S305のルーチンを実行することにより、途中で不具合が解消し、問題なくドライブシャフト3をその軸方向先端側に移動させることができるようになることが期待できる。
【0121】
また、ステップS305において、ドライブシャフト3の移動および回転が停止したと判断した場合は、このプログラムを終了する。
【0122】
なお、図示しないが、ステップS303において、検出した荷重が閾値を超えたと判断した場合は、さらに、警告情報を報知することが好ましい。
【0123】
以上説明したように、このカテーテルユニット100によれば、前述した第1実施形態と同様の効果が得られる。
【0124】
以上、本発明のドライブ装置およびカテーテルユニットを、図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置換することができる。また、本発明に、他の任意の構成物が付加されていてもよい。
【0125】
また、本発明は、前記各実施形態のうちの、任意の2以上の構成(特徴)を組み合わせたものであってもよい。
【0126】
なお、本発明では、外部ユニット(ドライブ装置)は、ドライブシャフトやカテーテル組立体を手動でその軸方向に移動させるように構成されていてもよい。
【0127】
また、本発明では、ドライブシャフトとカテーテルとが一体的にその軸方向に移動可能に構成されていてもよい。すなわち、画像取込部により生体管腔内の画像を取り込む際、ドライブシャフトとカテーテルとを一体的にその軸方向に移動させるように構成されていてもよい。
【0128】
また、本発明では、カテーテル本体は、液体の排出口として、その先端に開口する先端開口部を有するものに限定されず、例えば、先端部の側壁を貫通する側孔を有するものであってもよい。
【0129】
また、本発明では、カテーテル組立体で得られる画像としては、超音波画像に限定されず、例えば、光学的に得られる画像、すなわち、光を発光・受光することで得られる画像であってもよい。例えば、カテーテルは、光信号による画像、特に、光干渉断層画像診断装置(OCT)、その改良型である波長掃引を利用した光干渉断層画像診断装置(OFDI)に用いられるカテーテルであってもよい。この場合は、ドライブシャフトの先端部から出射される近赤外線を生体組織へ照射し、生体組織からの反射光を参照光と干渉させることで干渉光を生成した後、当該干渉光に基づいて、血管等の生体管腔内の断面画像を生成することができる。
【符号の説明】
【0130】
1 カテーテル組立体
2 カテーテル
21 カテーテル本体
210 ドライブシャフト挿入部
211 センサルーメン
212 開口部
213 間隙
22 コネクタ部
221 液体注入ポート
222 回動支持部
223 溝
23 ガイドワイヤ挿通部
233 ガイドワイヤルーメン
25 シール部材
26 ユニットコネクタ
27 中継コネクタ
28 外管
29 内管
291 ストッパ
3 ドライブシャフト
4 シャフト
5 撮像手段
51 ハウジング
511 貫通孔
52 超音波振動子
53 コネクタ部
531 コネクタ
532a、532b 溝
6 外部ユニット
61 スキャナ装置
610 ハウジング
611 モータ
611a 回転軸
612 回路基板
613 キャップ
614 プラグ
615 スペーサ
615a ベアリング
616a 第1の連結部材
616b 第2の連結部材
617 回転子
617a、617b 突起
618 回転子カバー
618a 突起
62 軸方向移動装置
620 スライド機構
621 モータ
622 支持部
63 制御部
64 表示部
10 センサ
100 カテーテルユニット
200 ガイドワイヤ
Q 液体
S101〜S104 ステップ
S201〜S206 ステップ
S301〜S305 ステップ
【技術分野】
【0001】
本発明は、ドライブ装置およびカテーテルユニットに関するものである。
【背景技術】
【0002】
血管等の生体管腔内に挿入して、その生体管腔内を超音波により診断するのに用いられるカテーテルが知られている(例えば、特許文献1参照)。
【0003】
特許文献1に記載のカテーテルは、ルーメンを有するカテーテル本体と、カテーテル本体のルーメンに挿入され、先端部に超音波を発する超音波発振部を有するシャフトとを備えている。このカテーテルは、ドライブ装置に接続され、そのドライブ装置によりカテーテル本体のルーメン内に挿入されているシャフトをその軸回りに回転させるとともに基端方向に移動させて、血管壁の超音波画像を取得することができる。なお、超音波画像を取得する際には、ルーメン内、すなわち、カテーテル本体の内周面と、シャフトの外周面との間に形成された間隙に、例えば生理食塩水等の液体を充填して、その作業を行なう。
【0004】
また、前記血管壁の超音波画像を取得した後は、シャフトをその軸回りに回転させるとともに先端方向に移動させ、元の位置まで戻す。なお、シャフトを先端方向に移動さる際、シャフトを回転させない場合もある。
【0005】
しかしながら、このような従来のドライブ装置では、血管壁の超音波画像を取得した後、シャフトをその軸回りに回転させるとともに先端方向に移動させて元の位置まで戻す際、シャフトが撓み、信号線等が断線する虞がある。
【0006】
その原因としては、カテーテル本体が屈曲していることがあり、その場合は、カテーテル本体のルーメンと超音波発振部との間の摺動抵抗により、超音波発振部が先端方向に移動し難くなり、その状態でシャフトを先端方向に移動させようとすると、シャフトが撓み、そのシャフトが渦巻き状や、とぐろを巻いたような状態となる。その結果、シャフトは、その基端側では回転するものの、先端側では回転が阻害され、信号線が断線する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第3954888号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明の目的は、断線等の不具合の発生を防止することができるドライブ装置およびカテーテルユニットを提供することにある。
【課題を解決するための手段】
【0009】
このような目的は、下記(1)〜(8)の本発明により達成される。
(1) 可撓性を有するカテーテル本体を備えるカテーテルと、先端側に生体管腔内の画像を取り込む画像取込部を有し、前記カテーテル内に回転可能に挿入されたドライブシャフトとを備えるカテーテル組立体が接続され、前記ドライブシャフトをその軸回りに回転させつつ、前記軸方向に移動させ、前記画像取込部により生体管腔内の画像を取り込むドライブ装置であって、
前記ドライブシャフトをその軸回りに回転させる回転手段と、
前記ドライブシャフトをその軸方向に移動させるスライド機構と、
前記ドライブシャフトをその軸方向先端側に移動させる際に該ドライブシャフトから受ける荷重を検出する荷重検出手段と、
安全処理を行う安全装置と、
前記安全装置の作動を制御する制御手段とを備え、
前記制御手段は、前記ドライブシャフトをその軸方向先端側に移動させる際に、前記荷重検出手段の検出結果に応じて、前記安全装置を作動させるよう構成されていることを特徴とするドライブ装置。
【0010】
(2) 前記制御手段は、前記ドライブシャフトをその軸方向先端側に移動させる際に、前記荷重検出手段により検出された荷重が閾値を超えた場合に、前記安全装置を作動させ、該安全装置により安全処理を行う上記(1)に記載のドライブ装置。
【0011】
(3) 前記安全装置は、前記ドライブシャフトの移動を停止させるかまたは移動速度を減速させるものである上記(1)または(2)に記載のドライブ装置。
【0012】
(4) 前記スライド機構は、モータを有し、該モータの駆動により前記ドライブシャフトをその軸方向先端側に移動させるよう構成されており、
前記安全装置は、前記モータの駆動を停止させるかまたは前記モータの駆動速度を減速させるものである上記(1)または(2)に記載のドライブ装置。
【0013】
(5) 前記安全装置は、警告情報を報知するものである上記(1)ないし(4)のいずれかに記載のドライブ装置。
【0014】
(6) 前記回転手段は、モータを有し、前記ドライブシャフトをその軸方向先端側に移動させる際に、該モータの駆動により前記ドライブシャフトをその軸回りに回転させるよう構成されており、
前記安全装置は、前記ドライブシャフトの回転を停止させるかまたは回転速度を減速させるものである上記(1)ないし(5)のいずれかに記載のドライブ装置。
【0015】
(7) 前記制御手段は、前記ドライブシャフトをその軸方向先端側に移動させる際に、前記荷重検出手段により検出された荷重が閾値を超えた場合に、前記安全装置により前記ドライブシャフトの移動速度を減速させ、再度、前記荷重検出手段により前記荷重を検出し、該検出された荷重が閾値を超えている場合に、前記安全装置により前記ドライブシャフトの移動速度をさらに減速させる上記(1)に記載のドライブ装置。
【0016】
(8) 可撓性を有するカテーテル本体を備えるカテーテルと、先端側に生体管腔内の画像を取り込む画像取込部を有し、前記カテーテル内に回転可能に挿入されたドライブシャフトとを備えるカテーテル組立体と、
上記(1)ないし(7)のいずれかに記載のドライブ装置とを備えることを特徴とするカテーテルユニット。
【発明の効果】
【0017】
本発明によれば、荷重検出手段の検出結果に応じて、安全装置を作動させ、例えば、ドライブシャフトの移動の停止、ドライブシャフトの移動速度の減速、ドライブシャフトの回転の停止、ドライブシャフトの回転速度減速、警告情報の報知等を行うことにより、断線等の不具合の発生を防止することができる。
【図面の簡単な説明】
【0018】
【図1】本発明のカテーテルユニットの第1実施形態を示す図である。
【図2】本発明のカテーテルユニットの第1実施形態を示す図である。
【図3】図1に示すカテーテルユニットの外部ユニットのスキャナ装置の断面図である。
【図4】図1に示すカテーテルユニットの外部ユニットのブロック図である。
【図5】図1に示すカテーテルユニットの外部ユニットの制御部の制御動作を示すフローチャートである。
【図6】本発明のカテーテルユニットの第2実施形態における外部ユニットの制御部の制御動作を示すフローチャートである。
【図7】本発明のカテーテルユニットの第3実施形態における外部ユニットの制御部の制御動作を示すフローチャートである。
【発明を実施するための形態】
【0019】
以下、本発明のドライブ装置およびカテーテルユニットを添付図面に示す好適な実施形態に基づいて詳細に説明する。
【0020】
<第1実施形態>
図1および図2は、それぞれ本発明のカテーテルユニットの第1実施形態を示す図、図3は、図1に示すカテーテルユニットの外部ユニットのスキャナ装置の断面図、図4は、図1に示すカテーテルユニットの外部ユニットのブロック図、図5は、図1に示すカテーテルユニットの外部ユニットの制御部の制御動作を示すフローチャートである。
【0021】
なお、以下では、図1、図2および図3中の左側を「先端」、右側を「基端」、上側を「上」、下側を「下」として説明を行う。
【0022】
図1に示すように、カテーテルユニット100は、外部ユニット(ドライブ装置)6と、カテーテル組立体1とを備えている。
【0023】
カテーテル組立体1は、カテーテル2と、カテーテル2内に挿入されるドライブシャフト3とを備えている。このカテーテル組立体1は、カテーテル2とドライブシャフト3とを組み立てた組立状態で、生体管腔(以下では「血管」を代表的に扱う)内に挿入して用いられ、その内部画像である血管壁の画像を取得するものである。なお、前記組立状態では、ドライブシャフト3は、カテーテル2内にその軸回りに回転可能でかつその軸方向に移動可能に挿入されている。
【0024】
また、カテーテル組立体1は、外部ユニット6に接続して用いられる。外部ユニット6は、駆動源であるモータ611を内蔵するスキャナ装置61と、スキャナ装置61を支持し、駆動源であるモータ621を内蔵し、そのモータ621の駆動によりスキャナ装置61を水平方向(軸方向)へ移動させる軸方向移動装置62と、制御部(制御手段)63と、表示部64とを有している。
【0025】
スキャナ装置61には、カテーテル組立体1の基端部が着脱自在に接続される。このスキャナ装置61は、ドライブシャフト3をその軸回りに回転させることができるように構成されている。
【0026】
図3に示すように、スキャナ装置61は、ハウジング610と、このハウジング610内に収納されたモータ611、モータ611および制御部63と電気的に接続される回路基板612、モータ611の回転軸611aに第1の連結部材616aと第2の連結部材616bを介して固定された回転子617、スペーサ615、スペーサ615内に収納されたベアリング615a、回転子617を被包する回転子カバー618、回転子カバー618を被包するキャップ613、回転子617内に固定され、ドライブシャフト3の後述するコネクタ部53のコネクタ531と係合するプラグ614とを備えている。プラグ614と回路基板612とは、電気的に接続されている。また、スペーサ615およびベアリング615aにより、回転子617は円滑に回転する。
【0027】
なお、回転子カバー618は、カテーテル2の後述するコネクタ部22が接続される接続部を構成している。また、モータ611、回路基板612、回転軸611a、第1の連結部材616a、第2の連結部材616bおよび回転子617により、ドライブシャフトをその軸回りに回転させる回転手段が構成される。
【0028】
回転子カバー618は、筒状をなしている。この回転子カバー618は、キャップ613よりも先端方向に突出しており、回転子カバー618のうちのキャップ613よりも先端方向に突出している部位が、カテーテル2のコネクタ部22との接続部を構成している。また、回転子カバー618のうちのキャップ613よりも先端方向に突出している部位の基端部の外周面には、コネクタ部22の後述する溝223内に挿入される突起618aが形成されている。この突起618aは、回転子カバー618の軸方向に沿って延在している。
【0029】
また、スキャナ装置61の回転子617の先端部には、略三角形をなす先端部を有する2つの突起617a、617bが先端方向に突出するように形成されている。各突起617a、617bは、互いに対向するように配置されている。
【0030】
また、回転子カバー618の外径は、コネクタ部22の内径と略等しく、もしくは若干小さく設定されている。
【0031】
コネクタ部22がスキャナ装置61の回転子カバー618に接続されたときに、後述するコネクタ部22の溝223と、この溝223内に挿入された回転子カバー618の突起618aとの係合により、カテーテル2の回転が防止される。
【0032】
また、コネクタ部22がスキャナ装置61の回転子カバー618に接続されたときに、後述するコネクタ部53の2つの溝532a、532bと、この2つの溝532a、532b内に挿入された2つの突起617a、617bとの係合により、スキャナ装置61からドライブシャフト3に回転力が伝達可能となる。
【0033】
また、コネクタ部22がスキャナ装置61の回転子カバー618に接続されたときに、後述するコネクタ部53のコネクタ531がスキャナ装置61のプラグ614に電気的および機械的に接続される。
【0034】
軸方向移動装置62は、スキャナ装置61を支持し、そのスキャナ装置61およびカテーテル組立体1をドライブシャフト3の軸方向に移動させることができるように構成されている。この軸方向移動装置62は、モータ621およびその駆動回路と、モータ621の回転力をドライブシャフト3の軸方向の駆動力に変換してそのドライブシャフト3に伝達する動力伝達機構とを有している。なお、モータ621、駆動回路および動力伝達機構により、ドライブシャフト3をその軸方向に移動させるスライド機構620が構成される。このスライド機構620の動力伝達機構としては、例えば、ボールネジ等を用いることができる。
【0035】
また、軸方向移動装置62の先端側には、カテーテル2の後述するユニットコネクタ26を、そのユニットコネクタ26が軸方向に移動しないように支持する支持部622が設けられている。
【0036】
これにより、外部ユニット6は、ドライブシャフト3をその軸回りに回転させつつ、軸方向に移動させ、ドライブシャフト3の超音波振動子(画像取込部)52を走査することができる。また、外部ユニット6は、スキャナ装置61を介して送られたドライブシャフト3から得られる情報に基づいて血管壁の画像を形成することができる。これにより、血管に対して任意の位置で、その周方向全周にわたって、超音波画像である血管内の横断面像が得られる。
【0037】
なお、このカテーテルユニット100では、ドライブシャフト3をその軸回りに回転させつつ、カテーテルはその軸方向に移動させずに、ドライブシャフト3をその軸方向基端側に移動させて超音波振動子52を走査し、その超音波振動子52により血管壁の画像を取り込む。そして、その画像の取り込みが終了すると、ドライブシャフト3をその軸回りに回転させつつ、カテーテルはその軸方向に移動させずに、ドライブシャフト3をその軸方向先端側に移動させ、元の位置まで戻す。
【0038】
また、スキャナ装置61内には、ドライブシャフト3をその軸方向先端側に移動させる際にドライブシャフト3から受ける荷重を検出するセンサ(荷重検出手段)10が設置されている。このセンサ10の位置は、前記荷重を検出し得る位置であれば特に限定されないが、本実施形態では、センサ10は、回転子カバー618の外周面に設置されている。なお、センサ10がドライブシャフト3から受ける荷重は、ドライブシャフト3をその軸方向先端側に移動させる際にドライブシャフト3に加わる荷重に相当する。そして、このセンサ10の検出結果は、制御部63に送信され、制御部63は、その検出結果に基づいて、安全処理を実行するか否かを判断する。
【0039】
制御部63は、例えばCPU(Central Processing Unit)や、メモリ等を内蔵したパーソナルコンピュータ等で構成されている。この制御部63は、前記安全処理を実行するか否かの判断を含め、スキャナ装置61、軸方向移動装置62、表示部64の作動等、外部ユニット6全体の制御を行う。
【0040】
表示部64は、例えば液晶表示装置等で構成されている。この表示部64には、カテーテル組立体1によって得られた血管壁の画像や、各種の情報が表示される。
【0041】
前述したように、制御部63は、ドライブシャフト3をその軸方向先端側に移動させる際に、センサ10の検出結果に応じて、安全処理を行う安全装置を作動させるように構成されている。すなわち、制御部63は、センサ10により検出された荷重が、許容範囲の上限値である閾値を超えた場合は、安全装置を作動させ、その安全装置により安全処理を行う。
【0042】
前記閾値は、特に限定されず、諸条件に応じて適宜決定されるものであるが、例えば、15〜30N程度の範囲内で設定されることが好ましく、15〜20N程度の範囲内で設定されることがより好ましい。
【0043】
また、前記安全処理を行う安全装置の構成例としては、例えば、下記構成例(1)〜(3)が挙げられる。
【0044】
(1)
構成例1の安全装置は、ドライブシャフト3の移動を停止させるかまたは移動速度を減速させるものである。具体的には、例えば、モータ621の駆動を停止させるかまたはモータ621の駆動速度を減速させるもの、すなわち、モータ621およびその駆動回路等が挙げられる。なお、モータ621の駆動の停止、駆動速度の減速には、それぞれ、電気制動を用いることが好ましい。
【0045】
(2)
構成例2の安全装置は、警告情報を報知するものである。具体的には、例えば、警告情報を表示するように構成された表示部64、ランプ(図示せず)、音声を発生する音声発生部(図示せず)、ブザー(図示せず)等が挙げられる。なお、表示部64で表示する警告情報としては、例えば、検出した荷重が閾値を超えたこと、軸方向移動装置62によるスキャナ装置61の移動やドライブシャフト3の回転を停止すべきこと等が挙げられる。
【0046】
(3)
構成例3の安全装置は、ドライブシャフト3の回転を停止させるかまたは回転速度を減速させるものである。具体的には、例えば、モータ611の駆動を停止させるかまたはモータ611の駆動速度を減速させるもの、すなわち、モータ611およびその駆動回路等が挙げられる。なお、モータ611の駆動の停止、駆動速度の減速には、それぞれ、電気制動を用いることが好ましい。
【0047】
前記安全装置により安全処理を行うことにより、後述する超音波振動子52等に接続されている信号線の断線等の不具合の発生を防止することができる。
【0048】
なお、安全装置としては、前記(1)〜(3)のうちの任意の2つで構成されていることが好ましく、3つで構成されていることがより好ましい。これにより、各効果が組み合わされ、より確実に断線等の不具合の発生を防止することができる。
【0049】
次に、カテーテル組立体1について説明する。
前述したように、カテーテル組立体1は、カテーテル2とドライブシャフト3とを備えている。
【0050】
カテーテル2は、可撓性を有する長尺状のカテーテル本体21と、カテーテル本体21の基端部に設けられた、中継コネクタ27、外管28、内管29、ユニットコネクタ26およびコネクタ部22とを備えている。
【0051】
カテーテル本体21には、ドライブシャフト3が挿入されるセンサルーメン211と、ガイドワイヤ200が挿入されるガイドワイヤルーメン233とがカテーテル本体21の長手方向に沿って形成されている。また、カテーテル本体21の先端部は、外径が縮径した縮径部となっている。
【0052】
センサルーメン211は、ドライブシャフト3が挿入可能であり、カテーテル本体21の全長に亘って形成されている。なお、カテーテル本体21のうちのセンサルーメン211が設けられている部位は、ドライブシャフト3が挿入可能なドライブシャフト挿入部210を構成する。
【0053】
また、ガイドワイヤルーメン233は、ガイドワイヤ200が挿通可能であり、本実施形態では、カテーテル本体21の先端部のみに形成されている。なお、カテーテル本体21のうちのガイドワイヤルーメン233が設けられている部位は、ガイドワイヤ200が挿通可能なガイドワイヤ挿通部23を構成する。
【0054】
センサルーメン211内には、ドライブシャフト3が挿入された状態、すなわち挿入状態で、液体Qが充填される。液体Qが充填されることにより、超音波振動子52からの超音波が血管壁にまで伝達して、当該血管壁から再度超音波振動子52にまで戻ってくることができる。これにより、超音波画像を確実に取得することができる。なお、液体Qとしては、特に限定されないが、例えば、生理食塩水、造影剤等が挙げられる。
【0055】
また、センサルーメン211は、カテーテル本体21の先端に開口した開口部212を有している。センサルーメン211に充填された液体Qは、開口部212を介して排出される。これにより、たとえ液体Qを過剰に充填したとしても、それによるカテーテル本体21の破損を確実に防止することができる。
【0056】
なお、開口部212は、図1に示す構成ではカテーテル本体21の中心軸に対して傾斜した方向に向かって開口しているが、これに限定されず、例えば、カテーテル本体21の中心軸方向、すなわち、先端方向に向かって開口していてもよい。
【0057】
カテーテル本体21は、その先端部に、ガイドワイヤ200が挿通可能な前記ガイドワイヤ挿通部23を有している。ガイドワイヤ挿通部23は、両端がそれぞれ開口した管状をなしており、そのガイドワイヤ挿通部23の内腔によりガイドワイヤルーメン233が構成される。カテーテル2は、ガイドワイヤ挿通部23のガイドワイヤルーメン233にガイドワイヤ200を挿通した状態で血管内に挿入されるものであり、ガイドワイヤ200の抜き差しを迅速に行なうことができる、いわゆる「ラピッドエクスチェンジタイプ(ショートモノレールタイプ)」のカテーテルである。
【0058】
ガイドワイヤ挿通部23は、図1に示す構成ではカテーテル本体21の中心軸と平行に配置されているが、これに限定されず、例えば、カテーテル本体21の中心軸に対して傾斜して配置されていてもよい。
【0059】
また、ガイドワイヤ挿通部23の長手方向の途中には、図示しないコイルが埋設されている。このコイルは、X線透視下でカテーテル2の先端部の位置を視認するための造影マーカとして機能するものである。なお、コイルは、X線不透過性を有する例えばプラチナのような金属材料で構成されている。
【0060】
カテーテル本体21は、可撓性を有する材料で構成され、その材料としては、特に限定されず、例えば、スチレン系、ポリオレフィン系、ポリウレタン系、ポリエステル系、ポリアミド系、ポリイミド系、ポリブタジエン系、トランスポリイソプレン系、フッ素ゴム系、塩素化ポリエチレン系等の各種熱可塑性エラストマー等の熱可塑性樹脂が挙げられ、これらのうちの1種または2種以上を組合せたもの(ポリマーアロイ、ポリマーブレンド、積層体等)を用いることができる。
【0061】
また、カテーテル本体21は、その管壁が単層のものであってもよいし、複数の層が積層された積層体であってもよい。
【0062】
カテーテル本体21の基端部に設けられた中継コネクタ27、外管28、内管29、ユニットコネクタ26およびコネクタ部22は、それぞれ、硬質の管体で構成されたものである。
【0063】
コネクタ部22は、外部ユニット6のスキャナ装置61に接続される。すなわち、コネクタ部22の基端部には、スキャナ装置61の回転子カバー618が嵌入され、これにより、コネクタ部22の基端部に、回転子カバー618が接続される。
【0064】
コネクタ部22の基端部の内周面には、回転子カバー618の突起618aが挿入される溝223が形成されている。この溝223は、コネクタ部22の長手方向に沿って延在している。
【0065】
コネクタ部22の長手方向の途中には、その部分から分岐した液体注入ポート221が突出形成されている。例えばシリンジを用いて液体注入ポート221から液体Qを注入することができる。そして、注入された液体Qは、カテーテル本体21のセンサルーメン211に充填されることとなる。
【0066】
コネクタ部22の基端部には、ドライブシャフト3を回動可能に支持する回動支持部222が設けられている。
【0067】
また、コネクタ部22の基端部には、回動支持部222よりも先端側に、シール部材25が設置されている。シール部材25は、形状がリング状をなす弾性体で構成されている。これにより、シール部材25がコネクタ部22の内周部とドライブシャフト3の外周部と間に間隙が生じるのを防止することができ、すなわち、液密性が保持され、よって、液体Qが基端方向に向かって漏出するのを防止することができる。
【0068】
コネクタ部22の先端部には、内管29の基端部が固定されている。内管29は、その先端にストッパ291を有している。
【0069】
また、ユニットコネクタ26と中継コネクタ27とは、外管28を介して接続されている。すなわち、外管28の先端部には、中継コネクタ27の基端部が固定され、外管28の基端部には、ユニットコネクタ26の先端部が固定されている。
【0070】
そして、内管29は、ユニットコネクタ26および外管28内に挿入されており、ユニットコネクタ26、中継コネクタ27および外管28に対し、その軸方向に移動可能に接続されている。
【0071】
また、中継コネクタ27の先端部には、カテーテル本体21の基端部が固定されている。
【0072】
なお、コネクタ部22の内管29に対する固定方法、中継コネクタ27のカテーテル本体21に対する固定方法としては、それぞれ、特に限定されず、例えば、接着(接着剤や溶媒による接着)による方法、融着(熱融着、高周波融着、超音波融着等)による方法等が挙げられる。
【0073】
コネクタ部22は、ドライブシャフト3の後述するコネクタ部53および内管29を保持する。軸方向移動装置62の支持部622によりユニットコネクタ26が支持され、コネクタ部22がスキャナ装置61の回転子カバー618に接続された状態において、軸方向移動装置62の作動により、スキャナ装置61が移動し、これにより、内管29がユニットコネクタ26および外管28に押し込まれ、またはユニットコネクタ26および外管28から引き出されることによって、ドライブシャフト3の後述するシャフト4が連動してカテーテル本体21内を軸方向に移動する。
【0074】
図1に示すように、内管29を最も押し込んだときには、内管29は、そのカテーテル本体21側の端部が外管28のカテーテル本体21側端部付近、すなわち、中継コネクタ27付近まで到達する。そして、この状態では、ドライブシャフト3の超音波振動子52は、カテーテル本体21の先端付近に位置する。
【0075】
また、図2に示すように、内管29を最も引き出したときには、内管29のストッパ291がユニットコネクタ26の内壁に引っかかり、内管29の先端付近以外が露出する。そして、この状態では、ドライブシャフト3の超音波振動子52は、前記カテーテル本体21の先端付近から基端方向に所定距離離間した位置に位置する。超音波振動子52が、図1に示す位置から図2に示す位置まで回転しながら移動することによって、血管および脈管などの断層画像を作成することができる。
【0076】
コネクタ部22、ユニットコネクタ26、中継コネクタ27、外管28および内管29の構成材料としては、それぞれ、特に限定されず、例えば、ポリ塩化ビニル、ポリエチレン、ポリプロピレン、環状ポリオレフィン、ポリスチレン、ポリ−(4−メチルペンテン−1)、ポリカーボネート、アクリル樹脂、アクリルニトリル−ブタジエン−スチレン共重合体、ポリエチレンテレフタレート、ポリエチレンナフタレート等のポリエステル、ブタジエン−スチレン共重合体、ポリアミド(例えば、ナイロン6、ナイロン6・6、ナイロン6・10、ナイロン12)のような各種樹脂が挙げられる。
【0077】
なお、コネクタ部22は、図1に示す構成では3つの管体を長手方向に沿って連結したものであるが、これに限定されず、例えば、1つの管体で構成されたものであってもよい。
【0078】
このようなカテーテル2のカテーテル本体21のセンサルーメン211には、ドライブシャフト3が挿入される。そして、この挿入状態のドライブシャフト3は、その中心軸回りにスキャナ装置61の作動によって回転する。
【0079】
ドライブシャフト3は、その本体となる長尺状のシャフト4と、シャフト4の先端部に固定されたハウジング51と、ハウジング51内に収納された超音波振動子52と、シャフト4の基端部に固定されたコネクタ部53とを有している。また、ドライブシャフト3では、ハウジング51、超音波振動子52、コネクタ部53が、血管壁の画像を撮像する撮像手段5を構成している。
【0080】
シャフト4は、スキャナ装置61の作動による回転力を超音波振動子52まで確実に伝達可能なトルク伝達性を有するものである。このシャフト4は、例えば、ステンレス鋼等のような金属線を密巻きにコイル状に巻回して形成されている。なお、この金属線は、多重に巻回されていてもよい。
【0081】
このシャフト4の外径は、センサルーメン211の直径よりも小さい。これにより、シャフト4の外周面とカテーテル本体21の内周面との間には、間隙213が形成される。カテーテル2の液体注入ポート221から注入された液体Qは、間隙213を流下して、開口部212から排出される。
【0082】
シャフト4の先端部には、ハウジング51が例えば接着剤により固定されている。ハウジング51は、ステンレス鋼等の金属製の円筒体で構成され、その壁部を貫通する貫通孔511が形成されている。貫通孔511からは、超音波振動子52が露出している。なお、ハウジング51の直径は、シャフト4の外径とほぼ同じかまたはそれよりも若干大きい。
【0083】
超音波振動子52は、その重心がシャフト4の中心軸上に位置するように、ハウジング51内で固定されている。これにより、超音波振動子52は、シャフト4とともに回転することができる。超音波振動子52は、平面視で矩形または円形状をなし、PZT(チタン酸ジルコン酸鉛)で構成された圧電体の両面に、電極を蒸着や印刷等により形成したものである。これにより、血管壁に臨んだ状態で、超音波振動子52から超音波を発することができるとともに、その超音波の血管壁での反射波を受けることができる、すなわち、超音波の送受信を行なうことができる。この送受信により、血管壁の画像を取り込むことができる。この画像は、超音波振動子52から超音波を発信し、その反射波が再度超音波振動子52に返ってくるまでの時間から血管壁までの距離を測定し、当該血管壁の状態を可視化したものである。
【0084】
また、超音波振動子52からは、複数の信号線(図示せず)がシャフト4内を挿通し、コネクタ部53、すなわち後述するコネクタ531と電気的に接続されている。
【0085】
コネクタ部53は、その基端に、スキャナ装置61のプラグ614に電気的および機械的に接続されるコネクタ531を有している。
【0086】
また、コネクタ部53の基端部の外周面には、スキャナ装置61の回転子617の2つの突起617a、617bが挿入される2つの溝532a、532bが形成されている。各溝532a、532bは、互いに対向するように配置され、軸方向に沿って延在している。
【0087】
コネクタ部53は、スキャナ装置61に接続され、当該スキャナ装置61からの回転力を直接的に受けることができる。このコネクタ部53は、銅等のような導電性を有する金属製の筒体で構成されている。これにより、コネクタ部53をスキャナ装置61と電気的に接続することもでき、超音波振動子52からの信号をスキャナ装置61を介して、表示部64に送信することができる。そして、血管壁の画像が表示部64に表示される。
【0088】
次に、血管壁の画像を取り込みが終了した後、ドライブシャフト3をその軸回りに回転させるとともに、その軸方向先端側に移動させ、元の位置まで戻す際の外部ユニット6の制御部63の制御動作について説明する。
【0089】
図5に示すうように、まず、軸方向移動装置62により、スキャナ装置61を先端方向に移動させるとともに、スキャナ装置61により、ドライブシャフト3をその軸回りに回転させる(ステップS101)。これにより、ドライブシャフト3は、回転しつつ、先端方向に移動する。また、このドライブシャフト3の移動は、安全処理における移動停止処理が行われない場合は、ドライブシャフト3が目的量だけ移動するまで行われるが、この動作についての図5のフローチャートへの記載および説明は、省略する。また、ドライブシャフト3の回転は、安全処理における回転停止処理が行われない場合は、ドライブシャフト3が目的量だけ移動するまで行われるが、この動作についての図5のフローチャートへの記載および説明は、省略する。
【0090】
次いで、センサ10により、ドライブシャフト3から受ける荷重を検出し(ステップS102)、その検出した荷重が、閾値を超えたか否かを判断する(ステップS103)。
【0091】
ステップS103において、検出した荷重が閾値を超えていないと判断した場合は、ステップS102に戻り、再度、ステップS102以降を実行する。
【0092】
また、ステップS103において、検出した荷重が閾値を超えたと判断した場合は、安全装置により安全処理を行う(ステップS104)。この安全処理としては、前述したように、ドライブシャフト3の移動を停止させるかまたは移動速度を減速させる処理、ドライブシャフト3の回転を停止させるかまたは回転速度を減速させる処理、警告情報を報知する処理等の少なくとも1つを行う。なお、安全処理として、前記のすべてを行うこと、すなわち、ドライブシャフト3の移動および回転を停止させ、かつ警告情報を報知することが好ましい。
【0093】
以上説明したように、このカテーテルユニット100によれば、センサ10の検出結果に応じて、安全装置を作動させることにより、信号線の断線等の不具合の発生を防止することができる。
【0094】
なお、本実施形態では、ドライブシャフト3をその軸回りに回転させるとともに、ドライブシャフト3を軸方向先端側に移動させるが、ドライブシャフト3を回転させずに、ドライブシャフト3を軸方向先端側に移動させてもよい。
【0095】
<第2実施形態>
図6は、本発明のカテーテルユニットの第2実施形態における外部ユニットの制御部の制御動作を示すフローチャートである。
【0096】
以下、第2実施形態について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
【0097】
第2実施形態のカテーテルユニット100の外部ユニット(ドライブ装置)6では、制御部63は、ドライブシャフト3をその軸方向先端側に移動させる際に、センサ10によりドライブシャフト3から受ける荷重を検出し、検出された荷重が閾値を超えた場合に、安全装置によりドライブシャフト3の移動速度を減速させ、再度、センサ10により前記荷重を検出し、検出された荷重が閾値を超えている場合に、安全装置によりドライブシャフト3の移動速度をさらに減速させる。すなわち、センサ10により検出された荷重が閾値よりも小さくなるまで、ドライブシャフト3の移動速度を段階的に減速させる。これにより、センサ10により検出された荷重が閾値を超えるような不具合が発生した場合に、途中でその不具合が解消し、問題なくドライブシャフト3をその軸方向先端側に移動させることができるようになることが期待できる。
【0098】
なお、センサ10により検出された荷重が閾値を超えたままである場合は、最終的には、ドライブシャフト3の移動が停止する。そして、ドライブシャフト3の移動を停止させる際は、ドライブシャフト3の回転を停止させる。また、警告情報の報知も行うことが好ましい。
【0099】
次に、血管壁の画像を取り込みが終了した後、ドライブシャフト3をその軸回りに回転させるとともに、その軸方向先端側に移動させ、元の位置まで戻す際の外部ユニット6の制御部63の制御動作について説明する。
【0100】
図6に示すうように、まず、軸方向移動装置62により、スキャナ装置61を先端方向に移動させるとともに、スキャナ装置61により、ドライブシャフト3をその軸回りに回転させる(ステップS201)。これにより、ドライブシャフト3は、回転しつつ、先端方向に移動する。また、このドライブシャフト3の移動は、安全処理による移動速度の減速処理で移動を停止しない場合は、ドライブシャフト3が目的量だけ移動するまで行われるが、この動作についての図6のフローチャートへの記載および説明は、省略する。また、ドライブシャフト3の回転は、安全処理による移動速度の減速処理で移動を停止しない場合は、ドライブシャフト3が目的量だけ移動するまで行われるが、この動作についての図6のフローチャートへの記載および説明は、省略する。
【0101】
次いで、センサ10により、ドライブシャフト3から受ける荷重を検出し(ステップS202)、その検出した荷重が、閾値を超えたか否かを判断する(ステップS203)。
【0102】
ステップS203において、検出した荷重が閾値を超えていないと判断した場合は、ステップS202に戻り、再度、ステップS202以降を実行する。
【0103】
また、ステップS203において、検出した荷重が閾値を超えたと判断した場合は、安全装置による安全処理、すなわち、ドライブシャフト3の移動速度を1段階減速させる(ステップS204)。
【0104】
次いで、ドライブシャフト3の移動が停止したか否かを判断する(ステップS205)。
【0105】
ステップS205において、ドライブシャフト3の移動が停止していないと判断した場合は、ステップS202に戻り、再度、ステップS202以降を実行する。このステップS202〜S205のルーチンを実行することにより、途中で不具合が解消し、問題なくドライブシャフト3をその軸方向先端側に移動させることができるようになることが期待できる。
【0106】
また、ステップS205において、ドライブシャフト3の移動が停止したと判断した場合は、ドライブシャフト3の回転を停止する(ステップS206)。
【0107】
なお、図示しないが、ステップS203において、検出した荷重が閾値を超えたと判断した場合は、さらに、警告情報を報知することが好ましい。
【0108】
以上説明したように、このカテーテルユニット100によれば、前述した第1実施形態と同様の効果が得られる。
【0109】
なお、本実施形態では、ドライブシャフト3の移動速度を段階的に減速させているが、これに限らず、例えば、ドライブシャフト3の回転速度を段階的に減速させてもよい。
【0110】
<第3実施形態>
図7は、本発明のカテーテルユニットの第3実施形態における外部ユニットの制御部の制御動作を示すフローチャートである。
【0111】
以下、第3実施形態について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
【0112】
第3実施形態のカテーテルユニット100の外部ユニット(ドライブ装置)6では、制御部63は、ドライブシャフト3をその軸方向先端側に移動させる際に、センサ10によりドライブシャフト3から受ける荷重を検出し、検出された荷重が閾値を超えた場合に、安全装置によりドライブシャフト3の移動速度および回転速度をそれぞれ減速させ、再度、センサ10により前記荷重を検出し、検出された荷重が閾値を超えている場合に、安全装置によりドライブシャフト3の移動速度および回転速度をそれぞれさらに減速させる。すなわち、センサ10により検出された荷重が閾値よりも小さくなるまで、ドライブシャフト3の移動速度および回転速度をそれぞれ段階的に減速させる。これにより、センサ10により検出された荷重が閾値を超えるような不具合が発生した場合に、途中でその不具合が解消し、問題なくドライブシャフト3をその軸方向先端側に移動させることができるようになることが期待できる。
【0113】
なお、センサ10により検出された荷重が閾値を超えた場合に、警告情報の報知も行うことが好ましい。
【0114】
次に、血管壁の画像を取り込みが終了した後、ドライブシャフト3をその軸回りに回転させるとともに、その軸方向先端側に移動させ、元の位置まで戻す際の外部ユニット6の制御部63の制御動作について説明する。
【0115】
図7に示すうように、まず、軸方向移動装置62により、スキャナ装置61を先端方向に移動させるとともに、スキャナ装置61により、ドライブシャフト3をその軸回りに回転させる(ステップS301)。これにより、ドライブシャフト3は、回転しつつ、先端方向に移動する。また、このドライブシャフト3の移動は、安全処理による移動速度の減速処理で移動を停止しない場合は、ドライブシャフト3が目的量だけ移動するまで行われるが、この動作についての図7のフローチャートへの記載および説明は、省略する。また、ドライブシャフト3の回転は、安全処理による回転移動速度の減速処理で回転を停止しない場合は、ドライブシャフト3が目的量だけ移動するまで行われるが、この動作についての図7のフローチャートへの記載および説明は、省略する。
【0116】
次いで、センサ10により、ドライブシャフト3から受ける荷重を検出し(ステップS302)、その検出した荷重が、閾値を超えたか否かを判断する(ステップS303)。
【0117】
ステップS303において、検出した荷重が閾値を超えていないと判断した場合は、ステップS302に戻り、再度、ステップS302以降を実行する。
【0118】
また、ステップS303において、検出した荷重が閾値を超えたと判断した場合は、安全装置による安全処理、すなわち、ドライブシャフト3の移動速度および回転速度をそれぞれ1段階減速させる(ステップS304)。
【0119】
次いで、ドライブシャフト3の移動および回転が停止したか否かを判断する(ステップS305)。
【0120】
ステップS305において、ドライブシャフト3の移動および回転が停止していないと判断した場合は、ステップS302に戻り、再度、ステップS302以降を実行する。このステップS302〜S305のルーチンを実行することにより、途中で不具合が解消し、問題なくドライブシャフト3をその軸方向先端側に移動させることができるようになることが期待できる。
【0121】
また、ステップS305において、ドライブシャフト3の移動および回転が停止したと判断した場合は、このプログラムを終了する。
【0122】
なお、図示しないが、ステップS303において、検出した荷重が閾値を超えたと判断した場合は、さらに、警告情報を報知することが好ましい。
【0123】
以上説明したように、このカテーテルユニット100によれば、前述した第1実施形態と同様の効果が得られる。
【0124】
以上、本発明のドライブ装置およびカテーテルユニットを、図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置換することができる。また、本発明に、他の任意の構成物が付加されていてもよい。
【0125】
また、本発明は、前記各実施形態のうちの、任意の2以上の構成(特徴)を組み合わせたものであってもよい。
【0126】
なお、本発明では、外部ユニット(ドライブ装置)は、ドライブシャフトやカテーテル組立体を手動でその軸方向に移動させるように構成されていてもよい。
【0127】
また、本発明では、ドライブシャフトとカテーテルとが一体的にその軸方向に移動可能に構成されていてもよい。すなわち、画像取込部により生体管腔内の画像を取り込む際、ドライブシャフトとカテーテルとを一体的にその軸方向に移動させるように構成されていてもよい。
【0128】
また、本発明では、カテーテル本体は、液体の排出口として、その先端に開口する先端開口部を有するものに限定されず、例えば、先端部の側壁を貫通する側孔を有するものであってもよい。
【0129】
また、本発明では、カテーテル組立体で得られる画像としては、超音波画像に限定されず、例えば、光学的に得られる画像、すなわち、光を発光・受光することで得られる画像であってもよい。例えば、カテーテルは、光信号による画像、特に、光干渉断層画像診断装置(OCT)、その改良型である波長掃引を利用した光干渉断層画像診断装置(OFDI)に用いられるカテーテルであってもよい。この場合は、ドライブシャフトの先端部から出射される近赤外線を生体組織へ照射し、生体組織からの反射光を参照光と干渉させることで干渉光を生成した後、当該干渉光に基づいて、血管等の生体管腔内の断面画像を生成することができる。
【符号の説明】
【0130】
1 カテーテル組立体
2 カテーテル
21 カテーテル本体
210 ドライブシャフト挿入部
211 センサルーメン
212 開口部
213 間隙
22 コネクタ部
221 液体注入ポート
222 回動支持部
223 溝
23 ガイドワイヤ挿通部
233 ガイドワイヤルーメン
25 シール部材
26 ユニットコネクタ
27 中継コネクタ
28 外管
29 内管
291 ストッパ
3 ドライブシャフト
4 シャフト
5 撮像手段
51 ハウジング
511 貫通孔
52 超音波振動子
53 コネクタ部
531 コネクタ
532a、532b 溝
6 外部ユニット
61 スキャナ装置
610 ハウジング
611 モータ
611a 回転軸
612 回路基板
613 キャップ
614 プラグ
615 スペーサ
615a ベアリング
616a 第1の連結部材
616b 第2の連結部材
617 回転子
617a、617b 突起
618 回転子カバー
618a 突起
62 軸方向移動装置
620 スライド機構
621 モータ
622 支持部
63 制御部
64 表示部
10 センサ
100 カテーテルユニット
200 ガイドワイヤ
Q 液体
S101〜S104 ステップ
S201〜S206 ステップ
S301〜S305 ステップ
【特許請求の範囲】
【請求項1】
可撓性を有するカテーテル本体を備えるカテーテルと、先端側に生体管腔内の画像を取り込む画像取込部を有し、前記カテーテル内に回転可能に挿入されたドライブシャフトとを備えるカテーテル組立体が接続され、前記ドライブシャフトをその軸回りに回転させつつ、前記軸方向に移動させ、前記画像取込部により生体管腔内の画像を取り込むドライブ装置であって、
前記ドライブシャフトをその軸回りに回転させる回転手段と、
前記ドライブシャフトをその軸方向に移動させるスライド機構と、
前記ドライブシャフトをその軸方向先端側に移動させる際に該ドライブシャフトから受ける荷重を検出する荷重検出手段と、
安全処理を行う安全装置と、
前記安全装置の作動を制御する制御手段とを備え、
前記制御手段は、前記ドライブシャフトをその軸方向先端側に移動させる際に、前記荷重検出手段の検出結果に応じて、前記安全装置を作動させるよう構成されていることを特徴とするドライブ装置。
【請求項2】
前記制御手段は、前記ドライブシャフトをその軸方向先端側に移動させる際に、前記荷重検出手段により検出された荷重が閾値を超えた場合に、前記安全装置を作動させ、該安全装置により安全処理を行う請求項1に記載のドライブ装置。
【請求項3】
前記安全装置は、前記ドライブシャフトの移動を停止させるかまたは移動速度を減速させるものである請求項1または2に記載のドライブ装置。
【請求項4】
前記スライド機構は、モータを有し、該モータの駆動により前記ドライブシャフトをその軸方向先端側に移動させるよう構成されており、
前記安全装置は、前記モータの駆動を停止させるかまたは前記モータの駆動速度を減速させるものである請求項1または2に記載のドライブ装置。
【請求項5】
前記安全装置は、警告情報を報知するものである請求項1ないし4のいずれかに記載のドライブ装置。
【請求項6】
前記回転手段は、モータを有し、前記ドライブシャフトをその軸方向先端側に移動させる際に、該モータの駆動により前記ドライブシャフトをその軸回りに回転させるよう構成されており、
前記安全装置は、前記ドライブシャフトの回転を停止させるかまたは回転速度を減速させるものである請求項1ないし5のいずれかに記載のドライブ装置。
【請求項7】
前記制御手段は、前記ドライブシャフトをその軸方向先端側に移動させる際に、前記荷重検出手段により検出された荷重が閾値を超えた場合に、前記安全装置により前記ドライブシャフトの移動速度を減速させ、再度、前記荷重検出手段により前記荷重を検出し、該検出された荷重が閾値を超えている場合に、前記安全装置により前記ドライブシャフトの移動速度をさらに減速させる請求項1に記載のドライブ装置。
【請求項8】
可撓性を有するカテーテル本体を備えるカテーテルと、先端側に生体管腔内の画像を取り込む画像取込部を有し、前記カテーテル内に回転可能に挿入されたドライブシャフトとを備えるカテーテル組立体と、
請求項1ないし7のいずれかに記載のドライブ装置とを備えることを特徴とするカテーテルユニット。
【請求項1】
可撓性を有するカテーテル本体を備えるカテーテルと、先端側に生体管腔内の画像を取り込む画像取込部を有し、前記カテーテル内に回転可能に挿入されたドライブシャフトとを備えるカテーテル組立体が接続され、前記ドライブシャフトをその軸回りに回転させつつ、前記軸方向に移動させ、前記画像取込部により生体管腔内の画像を取り込むドライブ装置であって、
前記ドライブシャフトをその軸回りに回転させる回転手段と、
前記ドライブシャフトをその軸方向に移動させるスライド機構と、
前記ドライブシャフトをその軸方向先端側に移動させる際に該ドライブシャフトから受ける荷重を検出する荷重検出手段と、
安全処理を行う安全装置と、
前記安全装置の作動を制御する制御手段とを備え、
前記制御手段は、前記ドライブシャフトをその軸方向先端側に移動させる際に、前記荷重検出手段の検出結果に応じて、前記安全装置を作動させるよう構成されていることを特徴とするドライブ装置。
【請求項2】
前記制御手段は、前記ドライブシャフトをその軸方向先端側に移動させる際に、前記荷重検出手段により検出された荷重が閾値を超えた場合に、前記安全装置を作動させ、該安全装置により安全処理を行う請求項1に記載のドライブ装置。
【請求項3】
前記安全装置は、前記ドライブシャフトの移動を停止させるかまたは移動速度を減速させるものである請求項1または2に記載のドライブ装置。
【請求項4】
前記スライド機構は、モータを有し、該モータの駆動により前記ドライブシャフトをその軸方向先端側に移動させるよう構成されており、
前記安全装置は、前記モータの駆動を停止させるかまたは前記モータの駆動速度を減速させるものである請求項1または2に記載のドライブ装置。
【請求項5】
前記安全装置は、警告情報を報知するものである請求項1ないし4のいずれかに記載のドライブ装置。
【請求項6】
前記回転手段は、モータを有し、前記ドライブシャフトをその軸方向先端側に移動させる際に、該モータの駆動により前記ドライブシャフトをその軸回りに回転させるよう構成されており、
前記安全装置は、前記ドライブシャフトの回転を停止させるかまたは回転速度を減速させるものである請求項1ないし5のいずれかに記載のドライブ装置。
【請求項7】
前記制御手段は、前記ドライブシャフトをその軸方向先端側に移動させる際に、前記荷重検出手段により検出された荷重が閾値を超えた場合に、前記安全装置により前記ドライブシャフトの移動速度を減速させ、再度、前記荷重検出手段により前記荷重を検出し、該検出された荷重が閾値を超えている場合に、前記安全装置により前記ドライブシャフトの移動速度をさらに減速させる請求項1に記載のドライブ装置。
【請求項8】
可撓性を有するカテーテル本体を備えるカテーテルと、先端側に生体管腔内の画像を取り込む画像取込部を有し、前記カテーテル内に回転可能に挿入されたドライブシャフトとを備えるカテーテル組立体と、
請求項1ないし7のいずれかに記載のドライブ装置とを備えることを特徴とするカテーテルユニット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−70814(P2013−70814A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−211610(P2011−211610)
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000109543)テルモ株式会社 (2,232)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000109543)テルモ株式会社 (2,232)
【Fターム(参考)】
[ Back to top ]