
ドーザ排土板のチルトおよびピッチの機能を実施するための二重シリンダ
【課題】ブルドーザ排土板のための改善された制御構成を提供すること。
【解決手段】ブルドーザ排土板が、排土板と押し梁との枢動連結によって画定される横方向軸のまわりで排土板ピッチを調整させるために、押し枠の左右の押し梁の前方端部に連結され、左右の押し梁シリンダが、各押し梁の中間に位置する長手軸のまわりで排土板のピッチ調整およびチルト調整を実施するために、押し梁と排土板との間に設けられる。押し梁が、排土板の高さを調整するために第2の横方向軸のまわりで垂直に枢動するように取り付けられ、この調整を実施するために、1対のリフトシリンダが、ブルドーザと排土板との間に連結される。電子制御装置を含む電気油圧制御システムが、押し梁シリンダの個別のまたは同時の制御を実施して操縦者の入力に従って排土板のチルトおよびピッチの調整を実施するために設けられ、シリンダ位置検知器によって位置のフィードバックがもたらされる。
【解決手段】ブルドーザ排土板が、排土板と押し梁との枢動連結によって画定される横方向軸のまわりで排土板ピッチを調整させるために、押し枠の左右の押し梁の前方端部に連結され、左右の押し梁シリンダが、各押し梁の中間に位置する長手軸のまわりで排土板のピッチ調整およびチルト調整を実施するために、押し梁と排土板との間に設けられる。押し梁が、排土板の高さを調整するために第2の横方向軸のまわりで垂直に枢動するように取り付けられ、この調整を実施するために、1対のリフトシリンダが、ブルドーザと排土板との間に連結される。電子制御装置を含む電気油圧制御システムが、押し梁シリンダの個別のまたは同時の制御を実施して操縦者の入力に従って排土板のチルトおよびピッチの調整を実施するために設けられ、シリンダ位置検知器によって位置のフィードバックがもたらされる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ブルドーザに関し、より詳細には、ドーザ排土板支持枠に連結された排土板のチルトおよびピッチの制御を実施するための油圧シリンダ構成に関する。
【背景技術】
【0002】
地面を削るため、または地面に沿って物質を押すために、装軌トラクタに横置排土板を備え付けることが長く知られてきた。これらの構成は一般に「ブルドーザ」と呼ばれ、横置排土板は、ブルドーザの前方に配置され、かつブルドーザの両側に配置された軌道枠の後方位置にそれぞれ枢動可能に連結された後方端部を有する押し枠の、前後方向に延在する左右の押し梁の前方端部に連結されており、押し枠の前方端部は、排土板の高さを制御するためにブルドーザの車台と排土板との間にそれぞれ連結された、伸縮可能な左右の油圧リフトシリンダによって支持されている。左右の押し梁シリンダが、排土板のチルトおよびピッチの変更を選択的に実施するために、左右の押し梁と排土板との間に連結される。
【0003】
米国特許第3,184,869号および第5,996,703号はそれぞれ、左右の押し梁シリンダの操作を制御するための個別の弁を備えるシステムを開示しているが、切換弁は、チルトおよびピッチの操作モードを切り換えることで備えられる。したがって、ドーザ排土板の「組み合わされた」チルトおよびピッチ運動を実施するための、チルトおよびピッチの同時操作が不可能である。さらに、各制御システムは、ドーザ排土板を昇降させる働きをする左右のリフトシリンダを備えるが、この操作はまた、押し梁が軌道枠に固着されることにより連結組立体によって画定される横方向軸のまわりで排土板が揺動するので、排土板のピッチ調整に影響を及ぼす。
【0004】
これらの従来技術の排土板制御構成は、特殊な整地装置部品を使用しなければならないことよりも、地ならし操作でドーザ排土板を使用することにより地表を所望の平坦度まで削るために望まれる精度に欠けるという欠点を有する。
【0005】
したがって、地表を所望の輪郭に正確に均すようにドーザ排土板を配向させるための、ブルドーザ排土板のチルトおよびピッチの調整構成を提供することが望ましい。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第3,184,869号
【特許文献2】米国特許第5,996,703号
【発明の概要】
【0007】
本発明によれば、ブルドーザ排土板のための改善された制御構成が提供される。
本発明の一目的は、排土板と押し枠との連結によって画定される横方向軸のまわりでピッチされるため、および左右の押し梁シリンダの同時のまたは別々の動作により排土板の両端間の中央にある長手軸のまわりでチルトされるために、押し枠の前方に取り付けられた、ブルドーザ排土板を提供することである。
【図面の簡単な説明】
【0008】
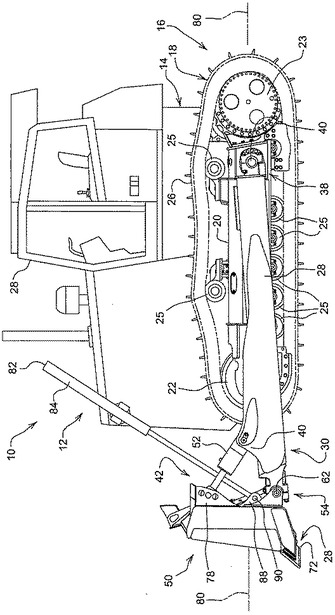
【図1】例えばトラクタおよび排土板を相互に連結する押し枠を有する装軌ドーザの形式の、作業車両の側面図である。
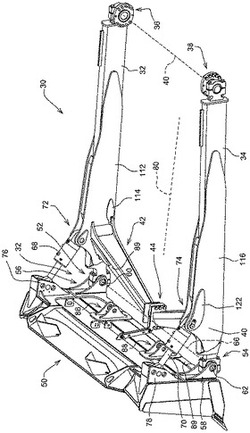
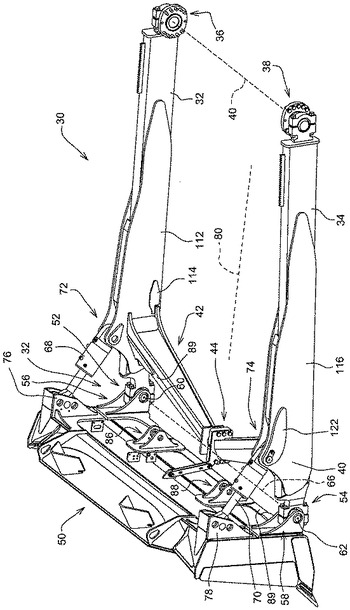
【図2】排土板に取り付けられた押し枠の斜視図である。
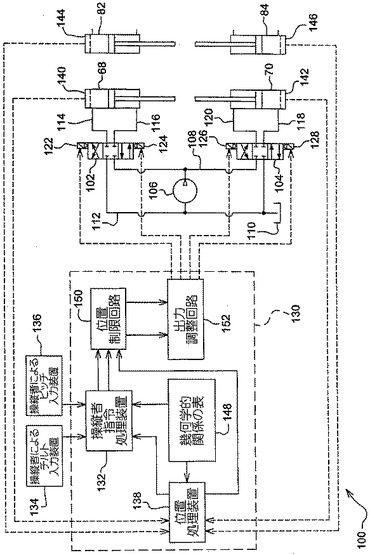
【図3】ドーザ排土板のチルトおよびピッチ機能を制御するための、電気油圧制御システムの概略図である。
【発明を実施するための形態】
【0009】
図1を参照すると、ブルドーザとして例示的に構成された作業車両10が示されている。車両10は、車台16上に支持された主枠14を備えるトラクタ12を備え、車台16は、車両10を推進させるためにトラクタの側方両側に配置された左右の軌道組立体を備え、軌道組立体は互いの鏡像とされており、左の軌道組立体だけが18で示されている。左の軌道組立体18は、前後方向に延在する軌道枠20を備え、軌道枠20は、その前端に遊動輪22を担持し、かつ、軌道枠20に対して前後方向の配置での位置でトラクタ主枠14に回転可能に取り付けられた駆動輪23のすぐ前方に位置決めされた後端を有する。無限軌道組立体26が、遊動輪22および駆動輪23の周りで環状にされ、かつ、軌道枠によって担持された上下の軌道支持輪25によって支持されており、ここでは簡易化されかつ仮想線で示される。車台16は、任意の他の適切な従来の形式でもよい。操縦室28が、主枠14の上部後方部上に設置され、操縦者はここから車両10を制御することができる。
【0010】
次に図2を同様に参照すると、前後方向に延在する左右の押し梁34および32を含む、押し枠30が示されており、左右の押し梁32および34はそれぞれ、左右の軌道組立体の側方外方に位置決めされ、また左右の枢動継手36および38により左右の軌道組立体の外側後方位置に連結された後端部を有し、左の継手と左の軌道組立体枠20との連結だけが示されている。左右の枢動継手36および38は、横方向枢動軸40を画定し、押し梁32および34は、そのまわりで垂直方向に枢動することができる。押し枠30はさらに、前方へ収束する左右の梁部分を有する横梁組立体42を含み、左右の梁部分は、押し梁34および32の内側前方領域に固定された外側端部と、球面継手構造体44によって一緒に固定された内側端部とを有し、球面継手構造体44は、内側端部の間の相対運動を可能にする。横梁組立体42は、押し枠30の安定性に役立つ。
【0011】
横置排土板50が、押し枠30によって支持されるように連結される。具体的には、押し梁32および34は、横梁組立体42を越えて前方に突出し、左右の枢動継手52および54によってそれぞれ画定される前方端部を有する。左右の枢動継手52および54は、排土板50の背面の下側左右の領域にそれぞれ配置された左右の連結張出受56および58の左右の直立板の間に、それぞれ受け入れられている。連結ピン60が、右の枢動継手52を右の連結張出受56に固着し、左の連結ピン62が、左の枢動継手54を左の連結張出受58に固着し、ピン60および62は、地面に対する排土板50のピッチ角を変更するために、下記の方法で排土板50をそのまわりで揺動させることができる、第2の横方向枢動軸66を画定する。
【0012】
左右の複動式押し梁シリンダ68および70が、排土板50のピッチ角およびチルト角の変更を行うために設けられ、これらのシリンダ68および70は、押し梁32および34のそれぞれの前方端部から後方に離間した上縁位置にある左右の張出受72および74で押し梁32および34に枢動可能に連結された、それぞれのシリンダ端部と、排土板50の背面の上側左右端部位置にそれぞれ配置された取付張出受78および76に枢動可能に連結された、それぞれのロッド端部とを有する。押し梁シリンダ68および70は、軸66のまわりで排土板50をピッチさせるため、および、鉛直面において押し梁32と34との間で長手方向中間に延びる長手軸80のまわりで排土板をチルトさせるために、下記の方法で個別に制御される。
【0013】
左右の油圧リフトシリンダ82および84は、トラクタ12の両側の上部左右前方領域にそれぞれトラニオン形式で取り付けられた、それぞれのシリンダ胴部と、左右の押し梁連結張出受56および58の内方にそれぞれ離間した、排土板50の背面のそれぞれの領域にある左右の取付張出受86および88に連結された、それぞれのロッド端部とを有し、例えば1対の枢動継手90、または任意の他の適切な連結器が、リフトシリンダのロッド端部を張出受86および88に固着するために使用されている。操縦者は、リフトシリンダ82および84を使用して、排土板50をトラクタ12に対して上げ下げすることができる。
【0014】
次に図3を参照すると、押し梁シリンダ68および70の操作を制御するための電気油圧制御システム100が示されており、リフトシリンダ82および84が示されているが、シリンダ82および84を制御するための操縦者による上昇入力および上昇制御弁は、簡潔さのために省略される。シリンダ82および84を選択的に伸張および収縮させるための任意の従来の制御構成が使用されうることを理解されたい。
【0015】
制御システム100は、第1および第2の電磁方向制御弁102および104を含み、各制御弁はそれぞれ、分岐した供給管路108によってポンプ106に接続され、かつ、ここではさらにポンプ106の入口に接続されて示されている分岐した戻り管路112により油だめ110に接続される。第1の方向制御弁102は、第1および第2の加圧/戻り管路114および116により、右の押し梁シリンダ68の頭部およびロッド端部にそれぞれ接続される。同様に、第2の方向制御弁104は、第3および第4の加圧/戻り管路118および120により、左の押し梁シリンダ70の頭部およびロッド端部にそれぞれ接続される。
【0016】
図3で考慮されるように、第1の方向制御弁102の上下の端部は、右のシリンダの伸張ソレノイド122および収縮ソレノイド124をそれぞれ備える。同様に、第2の方向制御弁104は、左のシリンダの伸張ソレノイド126および収縮ソレノイド128がそれぞれ設けられた、上下の端部を含む。
【0017】
電子制御装置130が、方向制御弁102および104を通じて押し梁シリンダ68および70の操作を制御するために設けられ、この電子制御装置130は、複数の入力を検知し、かつ方向制御弁102および104に送られる出力信号を応答して生成するように構成された、マイクロプロセッサを基盤とした制御装置であることが好ましい。したがって、電子制御装置130は、操縦者によるチルトおよびピッチの入力装置134および136から電気的な操縦者による入力を受け取るために接続された、操縦者指令処理装置132を含み、これらの入力装置はそれぞれ、操作レバーまたは同様の形式とされ、チルトおよびピッチの入力装置の位置が異なるごとに電気信号を送る、電位差計または他の適切な可変信号生成装置を操作し、この電気信号は、中立位置からの距離を増してゆくレバーの動きに比例する。操縦者指令処理装置132は、チルトおよびピッチの入力装置134および136によって生成された電気入力信号を受け取るために接続されることに加えて、位置処理装置138から排土板の現在位置信号を受け取る。位置処理装置138は、押し梁シリンダ68および70にそれぞれ関連する位置または行程検知器140および142から受け取った生成帰還位置信号に基づいて、また、リフトシリンダ82および84にそれぞれ関連付けられた位置または行程検知器144および146から受け取った生成帰還位置信号に基づいて、また、制御装置130のROM内に置かれた幾何学的関係の表148から受け取った情報に基づいて、排土板の位置を判定する。この表は、操縦者指令処理装置132にも情報を提供する。
【0018】
指令された値に対応する排土板チルトおよび/または排土板ピッチの位置値に操縦者指令処理装置132が達すると、チルトおよび/またはピッチの代表値が、位置制限回路150に送られる。位置制限回路150は、位置処理装置から受け取った信号から、干渉をきたす可能性がある位置、または排土板の相対的なピッチ角およびチルト角を保持もしくは制限するための所望のプリセット位置に、シリンダ68および70のどれか一方が近づきつつあるかどうかを判定する。そのような行程位置が近づきつつある場合、位置制限回路150は、適切な信号を出力調整回路152に送り、これが、制御弁102および104のどれか一方または両方に送られた指令信号を適切に遮断するまたは減少させるように働く。
【0019】
リフトシリンダ82および84の位置は、行程検知器144および146によって監視されており、したがって、リフトシリンダ82および84が排土板50を上下させるために使用される場合、このことが、リフトシリンダ82および84による排土板50の高さの再位置決めに起因して生じるピッチのいかなる変化をも相殺するための方向および規模でのシリンダ68および70の操作を通じて排土板50のピッチを修正することのために考慮されることに留意すべきである。
【0020】
したがって、従来技術の制御システムに反して、制御システム100により、チルトおよびピッチの入力指令信号が制御装置130に同時に送られること、ならびに排土板50のピッチ角およびチルト角の変更を同時に行うために、「組み合わされた」出力信号が制御弁102および104に送られることが可能になることが理解されよう。このことが、制御システム100および/または操縦者に、従来技術の制御システムによって可能なものを上回る同時自由度で操縦することを可能にし、それが操縦者の技巧の向上、したがって機械生産性の向上に役立つ。
【0021】
好ましい実施形態について説明してきたが、添付の特許請求の範囲に記載された本発明の範囲から逸脱することなく、様々な修正がなされうることが明らかになろう。
【符号の説明】
【0022】
10 作業車両
12 トラクタ
14 主枠
16 車台
18 軌道組立体
20 軌道枠、軌道組立体枠
22 遊動輪
23 駆動輪
25 軌道支持輪
26 無限軌道組立体
28 操縦室
30 押し枠
32 右の押し梁
34 左の押し梁
36 右の枢動継手
38 左の枢動継手
40 横方向枢動軸
42 横梁組立体
44 球面継手構造体
50 横置排土板
52 右の枢動継手
54 左の枢動継手
56 右の連結張出受
58 左の連結張出受
60 連結ピン
62 左の連結ピン
66 第2の横方向枢動軸
68 右の複動式押し梁シリンダ
70 左の複動式押し梁シリンダ
72 右の張出受
74 左の張出受
76 右の取付張出受
78 左の取付張出受
80 長手軸
82 右のリフトシリンダ
84 左のリフトシリンダ
86 右の取付張出受
88 左の取付張出受
90 1対の枢動継手
100 電気油圧制御システム
102 第1の電磁方向制御弁
104 第2の電磁方向制御弁
106 ポンプ
108 供給管路
110 油だめ
112 戻り管路
114 第1の加圧/戻り管路
116 第2の加圧/戻り管路
118 第3の加圧/戻り管路
120 第4の加圧/戻り管路
122 右のシリンダの伸張ソレノイド
124 右のシリンダの収縮ソレノイド
126 左のシリンダの伸張ソレノイド
128 左のシリンダの収縮ソレノイド
130 電子制御装置
132 操縦者指令処理装置
134 操縦者によるチルト入力装置
136 操縦者によるピッチ入力装置
138 位置処理装置
140、142、144、146 位置または行程検知器
148 幾何学的関係の表
150 位置制限回路
152 出力調整回路
【技術分野】
【0001】
本発明は、ブルドーザに関し、より詳細には、ドーザ排土板支持枠に連結された排土板のチルトおよびピッチの制御を実施するための油圧シリンダ構成に関する。
【背景技術】
【0002】
地面を削るため、または地面に沿って物質を押すために、装軌トラクタに横置排土板を備え付けることが長く知られてきた。これらの構成は一般に「ブルドーザ」と呼ばれ、横置排土板は、ブルドーザの前方に配置され、かつブルドーザの両側に配置された軌道枠の後方位置にそれぞれ枢動可能に連結された後方端部を有する押し枠の、前後方向に延在する左右の押し梁の前方端部に連結されており、押し枠の前方端部は、排土板の高さを制御するためにブルドーザの車台と排土板との間にそれぞれ連結された、伸縮可能な左右の油圧リフトシリンダによって支持されている。左右の押し梁シリンダが、排土板のチルトおよびピッチの変更を選択的に実施するために、左右の押し梁と排土板との間に連結される。
【0003】
米国特許第3,184,869号および第5,996,703号はそれぞれ、左右の押し梁シリンダの操作を制御するための個別の弁を備えるシステムを開示しているが、切換弁は、チルトおよびピッチの操作モードを切り換えることで備えられる。したがって、ドーザ排土板の「組み合わされた」チルトおよびピッチ運動を実施するための、チルトおよびピッチの同時操作が不可能である。さらに、各制御システムは、ドーザ排土板を昇降させる働きをする左右のリフトシリンダを備えるが、この操作はまた、押し梁が軌道枠に固着されることにより連結組立体によって画定される横方向軸のまわりで排土板が揺動するので、排土板のピッチ調整に影響を及ぼす。
【0004】
これらの従来技術の排土板制御構成は、特殊な整地装置部品を使用しなければならないことよりも、地ならし操作でドーザ排土板を使用することにより地表を所望の平坦度まで削るために望まれる精度に欠けるという欠点を有する。
【0005】
したがって、地表を所望の輪郭に正確に均すようにドーザ排土板を配向させるための、ブルドーザ排土板のチルトおよびピッチの調整構成を提供することが望ましい。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第3,184,869号
【特許文献2】米国特許第5,996,703号
【発明の概要】
【0007】
本発明によれば、ブルドーザ排土板のための改善された制御構成が提供される。
本発明の一目的は、排土板と押し枠との連結によって画定される横方向軸のまわりでピッチされるため、および左右の押し梁シリンダの同時のまたは別々の動作により排土板の両端間の中央にある長手軸のまわりでチルトされるために、押し枠の前方に取り付けられた、ブルドーザ排土板を提供することである。
【図面の簡単な説明】
【0008】
【図1】例えばトラクタおよび排土板を相互に連結する押し枠を有する装軌ドーザの形式の、作業車両の側面図である。
【図2】排土板に取り付けられた押し枠の斜視図である。
【図3】ドーザ排土板のチルトおよびピッチ機能を制御するための、電気油圧制御システムの概略図である。
【発明を実施するための形態】
【0009】
図1を参照すると、ブルドーザとして例示的に構成された作業車両10が示されている。車両10は、車台16上に支持された主枠14を備えるトラクタ12を備え、車台16は、車両10を推進させるためにトラクタの側方両側に配置された左右の軌道組立体を備え、軌道組立体は互いの鏡像とされており、左の軌道組立体だけが18で示されている。左の軌道組立体18は、前後方向に延在する軌道枠20を備え、軌道枠20は、その前端に遊動輪22を担持し、かつ、軌道枠20に対して前後方向の配置での位置でトラクタ主枠14に回転可能に取り付けられた駆動輪23のすぐ前方に位置決めされた後端を有する。無限軌道組立体26が、遊動輪22および駆動輪23の周りで環状にされ、かつ、軌道枠によって担持された上下の軌道支持輪25によって支持されており、ここでは簡易化されかつ仮想線で示される。車台16は、任意の他の適切な従来の形式でもよい。操縦室28が、主枠14の上部後方部上に設置され、操縦者はここから車両10を制御することができる。
【0010】
次に図2を同様に参照すると、前後方向に延在する左右の押し梁34および32を含む、押し枠30が示されており、左右の押し梁32および34はそれぞれ、左右の軌道組立体の側方外方に位置決めされ、また左右の枢動継手36および38により左右の軌道組立体の外側後方位置に連結された後端部を有し、左の継手と左の軌道組立体枠20との連結だけが示されている。左右の枢動継手36および38は、横方向枢動軸40を画定し、押し梁32および34は、そのまわりで垂直方向に枢動することができる。押し枠30はさらに、前方へ収束する左右の梁部分を有する横梁組立体42を含み、左右の梁部分は、押し梁34および32の内側前方領域に固定された外側端部と、球面継手構造体44によって一緒に固定された内側端部とを有し、球面継手構造体44は、内側端部の間の相対運動を可能にする。横梁組立体42は、押し枠30の安定性に役立つ。
【0011】
横置排土板50が、押し枠30によって支持されるように連結される。具体的には、押し梁32および34は、横梁組立体42を越えて前方に突出し、左右の枢動継手52および54によってそれぞれ画定される前方端部を有する。左右の枢動継手52および54は、排土板50の背面の下側左右の領域にそれぞれ配置された左右の連結張出受56および58の左右の直立板の間に、それぞれ受け入れられている。連結ピン60が、右の枢動継手52を右の連結張出受56に固着し、左の連結ピン62が、左の枢動継手54を左の連結張出受58に固着し、ピン60および62は、地面に対する排土板50のピッチ角を変更するために、下記の方法で排土板50をそのまわりで揺動させることができる、第2の横方向枢動軸66を画定する。
【0012】
左右の複動式押し梁シリンダ68および70が、排土板50のピッチ角およびチルト角の変更を行うために設けられ、これらのシリンダ68および70は、押し梁32および34のそれぞれの前方端部から後方に離間した上縁位置にある左右の張出受72および74で押し梁32および34に枢動可能に連結された、それぞれのシリンダ端部と、排土板50の背面の上側左右端部位置にそれぞれ配置された取付張出受78および76に枢動可能に連結された、それぞれのロッド端部とを有する。押し梁シリンダ68および70は、軸66のまわりで排土板50をピッチさせるため、および、鉛直面において押し梁32と34との間で長手方向中間に延びる長手軸80のまわりで排土板をチルトさせるために、下記の方法で個別に制御される。
【0013】
左右の油圧リフトシリンダ82および84は、トラクタ12の両側の上部左右前方領域にそれぞれトラニオン形式で取り付けられた、それぞれのシリンダ胴部と、左右の押し梁連結張出受56および58の内方にそれぞれ離間した、排土板50の背面のそれぞれの領域にある左右の取付張出受86および88に連結された、それぞれのロッド端部とを有し、例えば1対の枢動継手90、または任意の他の適切な連結器が、リフトシリンダのロッド端部を張出受86および88に固着するために使用されている。操縦者は、リフトシリンダ82および84を使用して、排土板50をトラクタ12に対して上げ下げすることができる。
【0014】
次に図3を参照すると、押し梁シリンダ68および70の操作を制御するための電気油圧制御システム100が示されており、リフトシリンダ82および84が示されているが、シリンダ82および84を制御するための操縦者による上昇入力および上昇制御弁は、簡潔さのために省略される。シリンダ82および84を選択的に伸張および収縮させるための任意の従来の制御構成が使用されうることを理解されたい。
【0015】
制御システム100は、第1および第2の電磁方向制御弁102および104を含み、各制御弁はそれぞれ、分岐した供給管路108によってポンプ106に接続され、かつ、ここではさらにポンプ106の入口に接続されて示されている分岐した戻り管路112により油だめ110に接続される。第1の方向制御弁102は、第1および第2の加圧/戻り管路114および116により、右の押し梁シリンダ68の頭部およびロッド端部にそれぞれ接続される。同様に、第2の方向制御弁104は、第3および第4の加圧/戻り管路118および120により、左の押し梁シリンダ70の頭部およびロッド端部にそれぞれ接続される。
【0016】
図3で考慮されるように、第1の方向制御弁102の上下の端部は、右のシリンダの伸張ソレノイド122および収縮ソレノイド124をそれぞれ備える。同様に、第2の方向制御弁104は、左のシリンダの伸張ソレノイド126および収縮ソレノイド128がそれぞれ設けられた、上下の端部を含む。
【0017】
電子制御装置130が、方向制御弁102および104を通じて押し梁シリンダ68および70の操作を制御するために設けられ、この電子制御装置130は、複数の入力を検知し、かつ方向制御弁102および104に送られる出力信号を応答して生成するように構成された、マイクロプロセッサを基盤とした制御装置であることが好ましい。したがって、電子制御装置130は、操縦者によるチルトおよびピッチの入力装置134および136から電気的な操縦者による入力を受け取るために接続された、操縦者指令処理装置132を含み、これらの入力装置はそれぞれ、操作レバーまたは同様の形式とされ、チルトおよびピッチの入力装置の位置が異なるごとに電気信号を送る、電位差計または他の適切な可変信号生成装置を操作し、この電気信号は、中立位置からの距離を増してゆくレバーの動きに比例する。操縦者指令処理装置132は、チルトおよびピッチの入力装置134および136によって生成された電気入力信号を受け取るために接続されることに加えて、位置処理装置138から排土板の現在位置信号を受け取る。位置処理装置138は、押し梁シリンダ68および70にそれぞれ関連する位置または行程検知器140および142から受け取った生成帰還位置信号に基づいて、また、リフトシリンダ82および84にそれぞれ関連付けられた位置または行程検知器144および146から受け取った生成帰還位置信号に基づいて、また、制御装置130のROM内に置かれた幾何学的関係の表148から受け取った情報に基づいて、排土板の位置を判定する。この表は、操縦者指令処理装置132にも情報を提供する。
【0018】
指令された値に対応する排土板チルトおよび/または排土板ピッチの位置値に操縦者指令処理装置132が達すると、チルトおよび/またはピッチの代表値が、位置制限回路150に送られる。位置制限回路150は、位置処理装置から受け取った信号から、干渉をきたす可能性がある位置、または排土板の相対的なピッチ角およびチルト角を保持もしくは制限するための所望のプリセット位置に、シリンダ68および70のどれか一方が近づきつつあるかどうかを判定する。そのような行程位置が近づきつつある場合、位置制限回路150は、適切な信号を出力調整回路152に送り、これが、制御弁102および104のどれか一方または両方に送られた指令信号を適切に遮断するまたは減少させるように働く。
【0019】
リフトシリンダ82および84の位置は、行程検知器144および146によって監視されており、したがって、リフトシリンダ82および84が排土板50を上下させるために使用される場合、このことが、リフトシリンダ82および84による排土板50の高さの再位置決めに起因して生じるピッチのいかなる変化をも相殺するための方向および規模でのシリンダ68および70の操作を通じて排土板50のピッチを修正することのために考慮されることに留意すべきである。
【0020】
したがって、従来技術の制御システムに反して、制御システム100により、チルトおよびピッチの入力指令信号が制御装置130に同時に送られること、ならびに排土板50のピッチ角およびチルト角の変更を同時に行うために、「組み合わされた」出力信号が制御弁102および104に送られることが可能になることが理解されよう。このことが、制御システム100および/または操縦者に、従来技術の制御システムによって可能なものを上回る同時自由度で操縦することを可能にし、それが操縦者の技巧の向上、したがって機械生産性の向上に役立つ。
【0021】
好ましい実施形態について説明してきたが、添付の特許請求の範囲に記載された本発明の範囲から逸脱することなく、様々な修正がなされうることが明らかになろう。
【符号の説明】
【0022】
10 作業車両
12 トラクタ
14 主枠
16 車台
18 軌道組立体
20 軌道枠、軌道組立体枠
22 遊動輪
23 駆動輪
25 軌道支持輪
26 無限軌道組立体
28 操縦室
30 押し枠
32 右の押し梁
34 左の押し梁
36 右の枢動継手
38 左の枢動継手
40 横方向枢動軸
42 横梁組立体
44 球面継手構造体
50 横置排土板
52 右の枢動継手
54 左の枢動継手
56 右の連結張出受
58 左の連結張出受
60 連結ピン
62 左の連結ピン
66 第2の横方向枢動軸
68 右の複動式押し梁シリンダ
70 左の複動式押し梁シリンダ
72 右の張出受
74 左の張出受
76 右の取付張出受
78 左の取付張出受
80 長手軸
82 右のリフトシリンダ
84 左のリフトシリンダ
86 右の取付張出受
88 左の取付張出受
90 1対の枢動継手
100 電気油圧制御システム
102 第1の電磁方向制御弁
104 第2の電磁方向制御弁
106 ポンプ
108 供給管路
110 油だめ
112 戻り管路
114 第1の加圧/戻り管路
116 第2の加圧/戻り管路
118 第3の加圧/戻り管路
120 第4の加圧/戻り管路
122 右のシリンダの伸張ソレノイド
124 右のシリンダの収縮ソレノイド
126 左のシリンダの伸張ソレノイド
128 左のシリンダの収縮ソレノイド
130 電子制御装置
132 操縦者指令処理装置
134 操縦者によるチルト入力装置
136 操縦者によるピッチ入力装置
138 位置処理装置
140、142、144、146 位置または行程検知器
148 幾何学的関係の表
150 位置制限回路
152 出力調整回路
【特許請求の範囲】
【請求項1】
操縦者入力装置を含み、前記操縦者入力装置が、ピッチ入力およびチルト入力を検知し、かつ前記ピッチ入力に応答してピッチ信号を生成し、かつ前記チルト入力に応答してチルト信号を生成するように構成された、装軌機械と、
排土板と、
前記装軌機械に連結された前後方向に延在する左右の押し梁を備え、かつ前方に前記排土板が取り付けられた、押し枠と、
前記排土板の左右の端部領域に連結された第1の端部および前記左右の押し梁に連結された第2の端部をそれぞれ有する左右の油圧押し梁シリンダを含み、前記左右の押し梁シリンダが、前後方向に延びるチルト軸および横方向に延びるピッチ軸のまわりで前記押し枠に対して前記排土板をそれぞれチルトおよびピッチさせる働きをし、電子油圧式の第1および第2の方向制御弁が、流体圧力源から前記左右の押し梁シリンダへの流体の流れを制御するため、および前記左右の押し梁シリンダから油だめへの流体の流れを制御するために、それぞれ流体接続された、油圧回路と、
前記左右の押し梁シリンダにそれぞれ関連付けられ、かつ前記左右の押し梁シリンダの行程をそれぞれ表す第1および第2の位置信号を検知および生成する働きをする、第1および第2の位置検知器と、
前記第1および第2の位置検知器のそれぞれから前記第1および第2の位置信号を受け取るために接続され、かつ前記第1および第2の方向制御弁のそれぞれに指令信号を送るために接続された、すなわち、前記第1および第2の位置検知器ならびに前記油圧回路に電気油圧接続された、電子制御装置と、を備え、前記制御装置が、
前記ピッチ信号、前記チルト信号、前記第1の位置信号、および前記第2の位置信号を受け取り、
前記ピッチおよびチルトの入力ならびに前記第1および第2の長さにそれぞれが依存する、第1の弁位置および第2の弁位置を判定し、
前記第1の弁を前記第1の弁位置へと指令する第1の制御信号、および前記第2の弁を前記第2の弁位置へと指令する第2の制御信号を出力するように構成された、作業車両。
【請求項2】
前記作業車両と前記排土板の左右の端部領域との間にそれぞれ連結された左右のリフトシリンダと、前記左右のリフトシリンダの位置を検知し、かつ前記左右のリフトシリンダの前記位置を表す左右のリフトシリンダ位置信号をそれぞれ生成するための、左右のリフトシリンダ位置検知器と、をさらに含み、前記左右のリフトシリンダ位置検知器が、前記制御装置に接続され、前記制御装置が、幾何学的関係の表を含む記憶装置を有し、かつ、前記リフトシリンダの操作によってもたらされたピッチの変化を表す信号を生成するために前記左右のリフトシリンダ位置信号に応答し、前記制御装置が、前記リフトシリンダの操作によってもたらされたピッチの変化を相殺するために、前記リフトシリンダの操作によってもたらされたピッチの変化を表す前記信号に応答して前記左右の押し梁シリンダの操作を実施する、請求項1に記載の作業車両。
【請求項3】
推進車両と、
ドーザ排土板と、
横方向排土板枢動軸を画定する第1の継手によって前記ドーザ排土板の下部後方位置に枢動可能に連結されたそれぞれの前端部を有し、かつ横方向アーム枢動軸を画定する第2の継手によって前記推進車両の両側に枢動可能に連結されたそれぞれの後端部を有する左右の押し梁を含む、押し枠と、
前記左右の押し梁と前記排土板との間にそれぞれ連結され、かつ前記排土板を前記排土板枢動軸のまわりで枢動させることにより排土板ピッチの変更を選択的に実施する働きをし、さらに前記各押し梁の中間に位置する長手軸のまわりで前記排土板を選択的にチルトさせる働きをする、左右の押し梁シリンダと、
前記右の押し梁シリンダ、流体圧力源、および油だめに接続され、かつ第1の方向制御弁の伸張および収縮を選択的に切り替えて実施する、電磁制御された第1の方向制御弁と、
前記左の押し梁シリンダ、前記流体圧力源、および前記油だめに接続され、かつ前記左の押し梁シリンダの伸張および収縮を選択的に切り替えて実施する、電磁制御された第2の方向制御弁と、
前記第1および第2の方向制御弁を選択的に切り替えることにより前記左右の押し梁シリンダを制御するために、前記第1および第2の方向制御弁の操作を制御するための、制御システムと、の組み合わせであって、前記制御システムが、
チルトおよびピッチの入力信号を生成するためにそれぞれ操作可能な、操縦者によるチルトおよびピッチの入力装置と、
前記チルトおよびピッチの入力装置から前記チルトおよびピッチの入力信号を受け取るために接続され、かつ前記第1および第2の制御弁のそれぞれにピッチおよびチルトの出力信号を送るために接続された、電子制御装置と、前記電子制御装置にチルトおよびピッチの入力信号を供給するために前記電子制御装置に接続された、手動操作式のチルトおよびピッチの入力装置と、を含み、前記チルトおよびピッチの入力装置が、必要に応じて、前記電子制御装置に送られるべき組み合わされたチルトおよびピッチ入力指令信号をもたらすために、同時に操作可能とされ、前記電子制御装置が、前記左右の押し梁シリンダを作動させて前記排土板のチルトおよびピッチを同時に調整させるために、前記組み合わされたチルトおよびピッチ入力指令信号に応答して作動して、組み合わされた出力指令信号を前記第1および第2の方向制御弁に送る、組み合わせ。
【請求項4】
前記電子制御装置が、前記左右の押し梁シリンダの様々な行程条件に対する排土板の位置に関連した表を含む記憶装置と、前記左右の押し梁シリンダにそれぞれ関連付けられ、かつ前記電子制御装置に左右の押し梁位置信号を供給する働きをする、左右の押し梁シリンダ位置検知器と、を含み、前記電子制御装置が、前記排土板の現在位置を判定し、かつ前記排土板の前記現在位置を、前記ピッチおよび/またはチルトの入力信号から判定された前記排土板の前記指令位置と比較する、請求項3に記載のブルドーザ。
【請求項5】
前記排土板に連結された少なくとも1つのリフトシリンダ、および
前記少なくとも1つのリフトシリンダに関連付けられ、かつ前記電子制御装置にリフトシリンダ位置信号を供給する働きをするリフトシリンダ位置検知器をさらに含み、前記電子制御装置が、前記第2の横方向軸のまわりの押し梁の位置からもたらされた前記排土板の前記ピッチを考慮して、前記ピッチ指令信号において何らかの変更がなされなければならないかを前記幾何学的関係の表から判定する、請求項4に記載のブルドーザ。
【請求項1】
操縦者入力装置を含み、前記操縦者入力装置が、ピッチ入力およびチルト入力を検知し、かつ前記ピッチ入力に応答してピッチ信号を生成し、かつ前記チルト入力に応答してチルト信号を生成するように構成された、装軌機械と、
排土板と、
前記装軌機械に連結された前後方向に延在する左右の押し梁を備え、かつ前方に前記排土板が取り付けられた、押し枠と、
前記排土板の左右の端部領域に連結された第1の端部および前記左右の押し梁に連結された第2の端部をそれぞれ有する左右の油圧押し梁シリンダを含み、前記左右の押し梁シリンダが、前後方向に延びるチルト軸および横方向に延びるピッチ軸のまわりで前記押し枠に対して前記排土板をそれぞれチルトおよびピッチさせる働きをし、電子油圧式の第1および第2の方向制御弁が、流体圧力源から前記左右の押し梁シリンダへの流体の流れを制御するため、および前記左右の押し梁シリンダから油だめへの流体の流れを制御するために、それぞれ流体接続された、油圧回路と、
前記左右の押し梁シリンダにそれぞれ関連付けられ、かつ前記左右の押し梁シリンダの行程をそれぞれ表す第1および第2の位置信号を検知および生成する働きをする、第1および第2の位置検知器と、
前記第1および第2の位置検知器のそれぞれから前記第1および第2の位置信号を受け取るために接続され、かつ前記第1および第2の方向制御弁のそれぞれに指令信号を送るために接続された、すなわち、前記第1および第2の位置検知器ならびに前記油圧回路に電気油圧接続された、電子制御装置と、を備え、前記制御装置が、
前記ピッチ信号、前記チルト信号、前記第1の位置信号、および前記第2の位置信号を受け取り、
前記ピッチおよびチルトの入力ならびに前記第1および第2の長さにそれぞれが依存する、第1の弁位置および第2の弁位置を判定し、
前記第1の弁を前記第1の弁位置へと指令する第1の制御信号、および前記第2の弁を前記第2の弁位置へと指令する第2の制御信号を出力するように構成された、作業車両。
【請求項2】
前記作業車両と前記排土板の左右の端部領域との間にそれぞれ連結された左右のリフトシリンダと、前記左右のリフトシリンダの位置を検知し、かつ前記左右のリフトシリンダの前記位置を表す左右のリフトシリンダ位置信号をそれぞれ生成するための、左右のリフトシリンダ位置検知器と、をさらに含み、前記左右のリフトシリンダ位置検知器が、前記制御装置に接続され、前記制御装置が、幾何学的関係の表を含む記憶装置を有し、かつ、前記リフトシリンダの操作によってもたらされたピッチの変化を表す信号を生成するために前記左右のリフトシリンダ位置信号に応答し、前記制御装置が、前記リフトシリンダの操作によってもたらされたピッチの変化を相殺するために、前記リフトシリンダの操作によってもたらされたピッチの変化を表す前記信号に応答して前記左右の押し梁シリンダの操作を実施する、請求項1に記載の作業車両。
【請求項3】
推進車両と、
ドーザ排土板と、
横方向排土板枢動軸を画定する第1の継手によって前記ドーザ排土板の下部後方位置に枢動可能に連結されたそれぞれの前端部を有し、かつ横方向アーム枢動軸を画定する第2の継手によって前記推進車両の両側に枢動可能に連結されたそれぞれの後端部を有する左右の押し梁を含む、押し枠と、
前記左右の押し梁と前記排土板との間にそれぞれ連結され、かつ前記排土板を前記排土板枢動軸のまわりで枢動させることにより排土板ピッチの変更を選択的に実施する働きをし、さらに前記各押し梁の中間に位置する長手軸のまわりで前記排土板を選択的にチルトさせる働きをする、左右の押し梁シリンダと、
前記右の押し梁シリンダ、流体圧力源、および油だめに接続され、かつ第1の方向制御弁の伸張および収縮を選択的に切り替えて実施する、電磁制御された第1の方向制御弁と、
前記左の押し梁シリンダ、前記流体圧力源、および前記油だめに接続され、かつ前記左の押し梁シリンダの伸張および収縮を選択的に切り替えて実施する、電磁制御された第2の方向制御弁と、
前記第1および第2の方向制御弁を選択的に切り替えることにより前記左右の押し梁シリンダを制御するために、前記第1および第2の方向制御弁の操作を制御するための、制御システムと、の組み合わせであって、前記制御システムが、
チルトおよびピッチの入力信号を生成するためにそれぞれ操作可能な、操縦者によるチルトおよびピッチの入力装置と、
前記チルトおよびピッチの入力装置から前記チルトおよびピッチの入力信号を受け取るために接続され、かつ前記第1および第2の制御弁のそれぞれにピッチおよびチルトの出力信号を送るために接続された、電子制御装置と、前記電子制御装置にチルトおよびピッチの入力信号を供給するために前記電子制御装置に接続された、手動操作式のチルトおよびピッチの入力装置と、を含み、前記チルトおよびピッチの入力装置が、必要に応じて、前記電子制御装置に送られるべき組み合わされたチルトおよびピッチ入力指令信号をもたらすために、同時に操作可能とされ、前記電子制御装置が、前記左右の押し梁シリンダを作動させて前記排土板のチルトおよびピッチを同時に調整させるために、前記組み合わされたチルトおよびピッチ入力指令信号に応答して作動して、組み合わされた出力指令信号を前記第1および第2の方向制御弁に送る、組み合わせ。
【請求項4】
前記電子制御装置が、前記左右の押し梁シリンダの様々な行程条件に対する排土板の位置に関連した表を含む記憶装置と、前記左右の押し梁シリンダにそれぞれ関連付けられ、かつ前記電子制御装置に左右の押し梁位置信号を供給する働きをする、左右の押し梁シリンダ位置検知器と、を含み、前記電子制御装置が、前記排土板の現在位置を判定し、かつ前記排土板の前記現在位置を、前記ピッチおよび/またはチルトの入力信号から判定された前記排土板の前記指令位置と比較する、請求項3に記載のブルドーザ。
【請求項5】
前記排土板に連結された少なくとも1つのリフトシリンダ、および
前記少なくとも1つのリフトシリンダに関連付けられ、かつ前記電子制御装置にリフトシリンダ位置信号を供給する働きをするリフトシリンダ位置検知器をさらに含み、前記電子制御装置が、前記第2の横方向軸のまわりの押し梁の位置からもたらされた前記排土板の前記ピッチを考慮して、前記ピッチ指令信号において何らかの変更がなされなければならないかを前記幾何学的関係の表から判定する、請求項4に記載のブルドーザ。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−83143(P2013−83143A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−180013(P2012−180013)
【出願日】平成24年8月15日(2012.8.15)
【出願人】(591005165)ディーア・アンド・カンパニー (109)
【氏名又は名称原語表記】DEERE AND COMPANY
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2012−180013(P2012−180013)
【出願日】平成24年8月15日(2012.8.15)
【出願人】(591005165)ディーア・アンド・カンパニー (109)
【氏名又は名称原語表記】DEERE AND COMPANY
【Fターム(参考)】
[ Back to top ]