
ナノスケールのデバイスを製造するための干渉分析
本発明は、2つの座標系の間の相対的な空間パラメータを決定するシステム及び方法を特徴としており、この2つの座標系は、モールドと、パターンを生成するようにモールドが利用される基板の領域であってよい。このために、複数のポイントにおける2つの座標系の間の相対的なアライメントを検知し、それらの間の相対的な空間パラメータを決定する。相対的な空間パラメータは、相対的なエリアと相対的な形状を含んでいる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の分野は、一般に、構造のナノレベルにおける製造に関するものである。更に詳しくは、本発明は、ナノスケールのデバイスの製造に好適な重畳状態にある複数のパターンの分析を円滑に実行するシステムに関するものである。
【背景技術】
【0002】
ナノスケールの製造は、例えば、1ナノメートル以上のレベルのフィーチャを具備した非常に小さな構造の製造を伴っている。ナノスケールの製造に使用する有望なプロセスは、インプリントリソグラフィーと呼ばれている。模範的なインプリントリソグラフィープロセスについては、「Method and a Mold to Arrange Features on a Substrate to Replicate Features having Minimal Dimensional Variability」という名称の米国特許出願第10/264,960号として出願された特許文献1、「Method of Forming a Layer on a Substrate to Facilitate Fabrication of Metrology Standards」という名称の米国特許出願第10/264,926号として出願された特許文献2、及び「Method and a Mold to Arrange Features on a Substrate to Replicate Features having minimal Dimensions Variability」という名称の米国特許出願第10/235,314号として出願された特許文献3(これらは、いずれも、本発明の譲受人に譲渡されたものである)などの多数の文献に詳述されている。
【0003】
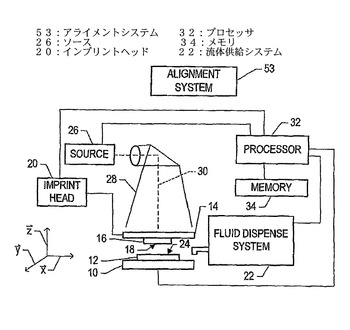
図1を参照すれば、インプリントリソグラフィーの背後にある基本的な概念は、特にエッチングマスクとして機能可能なレリーフパターンを基板上に形成し、これにより、このレリーフパターンに対応したパターンを基板内に形成できるようにすることである。レリーフパターンを形成するために利用されるシステムは、基板12を支持するステージ10を含んでいる。テンプレート14は、パターニング表面18を有するモールド16を具備している。パターニング表面18は、実質的に滑らかであると共に/又は、平坦であって、或いは、パターニングすることによって1つ又は複数の凹部をその内部に形成することも可能である。テンプレート14は、テンプレート14の動きを促進させるようにインプリントヘッド20に結合されている。重合体材料24を堆積させるように基板12と流体連絡状態に選択的に配置されるように、流体供給システム22が設けられている。エネルギー28の供給源26が、経路30に沿ってエネルギー28を導くように設けられている。インプリントヘッド20とステージ10は、重畳状態になると共に経路30内に配置されるように、それぞれ、モールド16と基板12を配置するように構成されている。インプリントヘッド20、ステージ10、又はこれらの両方は、モールド16と基板12の間の距離を変化させることにより、これらの間に、重合体材料24によって充填される所望の容積を決めている。通常、重合体材料24は、モールド16と基板12の間に望ましい容積が決められる前に、基板12上に配置される。但し、望ましい容積が得られた後に、その容積を重合体材料24によって充填することも可能である。望ましい容積が重合体材料24によって充填された後に、供給源26は、エネルギー28を生成し、このエネルギーにより、重合体材料24は、基板表面24とモールド表面18の形状に従って凝固及び/又は架橋される。このプロセスの制御は、プロセッサ32によって調節されており、このプロセッサは、メモリ34内に保存されているコンピュータ可読プログラムに基づいて動作するステージ10、インプリントヘッド20、流体供給システム22、供給源26とのデータ通信状態にある。
【0004】
エネルギー28が重合体材料24上に入射できるように、モールド16は、エネルギー28の波長に対して実質的に透明であり、この結果、このエネルギーがモールドを通じて伝播可能であることが望ましい。更には、モールド16を通じて伝播するエネルギー束を極大化させるように、エネルギーは、経路30内における障害物の存在を伴うことなしに、モールド16のエリア全体をカバーするのに十分な断面を具備している。
【0005】
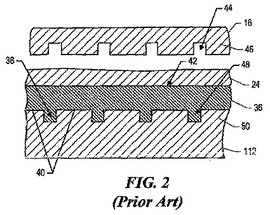
図1、図2を参照すれば、モールド16によって生成されるパターンは、既にパターンが存在している基板112上に形成されることが多い。このために、通常、表面42に配置された重合体材料24に、パターニングされたインプリントレイヤ(図示されてはいない)を形成するための(平坦でない場合には、滑らかな)表面42を提供するように、基板112に形成されている凹部38と突出40によって示されているパターニングされたフィーチャの上にプライマレイヤ36を堆積している。このために、モールド16と基板112は、アライメントマークを含んでおり、これらは、パターニングされたフィーチャの一部を含む。例えば、モールド16は、モールドアライメントマークと呼ばれるアライメントマークを備え、これらは、フィーチャ44、46によって決まる。基板112は、基板アライメントマークと呼ばれるアライメントマークを含み、これらは、フィーチャ48、50によって決まる。
【0006】
モールド16と基板112の間に適切なアライメントを確保しなければ、基板112上に記録されるパターンにエラーが導入される可能性がある。標準的なアライメントエラーに加えて、倍率/ランアウトエラーにより、特に、モールド16とパターニング対象である基板112の領域の間の小さな変動に起因し、記録されるパターンに歪が発生することがある。倍率/ランアウトエラーは、モールド16上のパターンを記録する対象である基板112の領域がモールド16上のパターンのエリアを上回っている際に発生する。又、倍率/ランアウトエラーは、モールド16のパターンを記録する対象である基板12の領域がオリジナルのパターンよりも小さなエリアを具備している際にも発生する。この倍率/ランアウトエラーの有害な影響は、1つの共通領域内に複数のパターンを形成する際に悪化する。モールド16上のパターンを記録する対象である基板112上の領域との関連において、基板112に対して垂直の軸を中心としてモールド16上のパターンを回転した場合には、更なるエラーが発生する。これは、方向エラーと呼ばれている。又、モールド16の周囲の形状が、パターンが記録される基板112上の領域の周囲の形状と異なっている際にも歪が発生する。これは、通常、モールド16及び/又は基板112の領域の横方向に延びる周囲のセグメントが直交していない際に発生する。これは、スキュー/直交性歪と呼ばれている。
【0007】
基板112上のパターンとモールド16によって生成されるパターンの間の適切なアライメントを確保するように、モールドと基板のアライメントマーク間における適切なアライメントを確保することが望ましい。これは、通常、例えば、同時に、モールド16と基板12の両方の光学的な通信状態に選択的に配置されるアライメントシステム53などの支援された眼を利用して実現されている。模範的なアライメントシステムは、接眼顕微鏡又はその他の画像生成システムを含んでいる。アライメントシステム53は、通常、経路30に対して平行な情報を入手している。そして、オペレータによって手動で(又は、ビジョンシステムを使用して自動的に)アライメントを実現している。
【0008】
【特許文献1】米国公開特許出願第2004−0065976号明細書
【特許文献2】米国公開特許出願第2004−0065252号明細書
【特許文献3】米国公開特許出願第2004−0046271号明細書
【発明の開示】
【発明が解決しようとする課題】
【0009】
従って、インプリントリソグラフィープロセス用の改善されたアライメント法を提供するというニーズが存在している。
【課題を解決するための手段】
【0010】
本発明は、2つの座標系の間の相対的な空間パラメータを決定するシステムと方法を特徴としており、これら2つの座標系は、モールドと、モールドを使用してパターンを生成する基板の領域と、である。このために、複数のポイントにおいて2つの座標系の間の相対的なアライメントを検知することにより、それらの間の相対的な空間パラメータを決定している。これらの相対的な空間パラメータは、相対的なエリアと相対的な形状を含んでいる。以下、これら及びその他の実施形態について更に詳細に説明する。
【発明を実施するための最良の形態】
【0011】
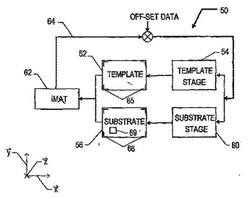
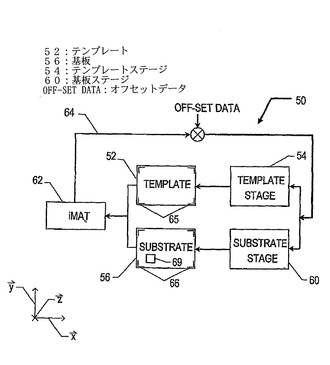
図3を参照すれば、本発明は、テンプレートステージ54内に保持されたテンプレート52と基板ステージ60上に支持された基板56を具備するインプリントリソグラフィーシステム50を含んでおり、干渉分析ツール(iMAT(商標))62が、テンプレート52と基板56の両方と光学的な通信状態にある。重合体流体供給システムと化学作用を有する放射線の供給源も存在しているが(図1との関連において説明したように、これらは、いずれも、通常、インプリントリソグラフィーシステムに包含されている)、わかりやすくするように、これは図示されてはいない。模範的なテンプレートステージは、屈曲システム(図示されてはいない)を通じてインプリントヘッド20に結合されたチャックシステム(図示されてはいない)及びアクチュエータサブアセンブリ(図示されてはいない)を含んでいるが、これらについては、いずれも、Anshuman Cherala、Byung−Jin Choi、Pawan Kumar Nimmakayala、Mario J. Meissl 及びSidlgata V. Sreenivasanを発明者とする代理人ドケット番号P154−30V147を具備した「SYSTEM FOR MAGNIFICATION AND SITORTION CORRECTION DURING NANO−SCALE MANUFACTURE」という名称の(本出願と共に)出願された同時係属中の米国特許出願番号(まだ付与されていない)明細書に記述されており、この内容は、本引用により、本明細書に包含される。
【0012】
iMAT(商標)62は、ステージ54、60の両方と結合することにより、フィードバックループ64を介してこれらと通信し、2つの座標系(1つはテンプレート52によって定義され、もう1つは、基板56によって定義されている)の間の適切な空間配列を容易にすることにより、これらの間の望ましい空間配列を実現している。このために、iMAT(商標)62は、テンプレート52と基板56の両方の複数の空間パラメータに関するデータを生成すると共に、これらに応答して信号を決定することにより、空間パラメータ間の差が望ましい公差内に収まるようにしている。このために、iMAT(商標)62は、テンプレートアライメントマーク65と呼ばれるテンプレート52上の1つ又は複数のアライメントマークと、基板アライメントマーク66と呼ばれる基板56上の1つ又は複数のアライメントマークを検知するようになっている。iMAT(商標)62は、アライメントマーク65、66を検知することによって得られた情報に基づいて、テンプレート52と基板56の複数の相対的な空間パラメータを決定可能である。これらの空間パラメータは、アラインメントマークの間のX、Y方向に沿ったこれらの間のミスアライメントを含み、さらに、相対的な倍率/ランアウト計測値と呼ばれるX、Y方向における基板56とテンプレート52との間の相対的なサイズの差と、スキュー計測値とよばれるテンプレート52及び/又は基板56上の2つの隣接する横方向に延びるエッジの相対的な非直交性とを含んでいる。又、iMAT(商標)62は、テンプレート52が位置しているプレーンとテンプレート52に対向している基板56の表面に対して実質的に垂直であるZ方向を中心とした相対的な回転の向きを決定することも可能である。
【0013】
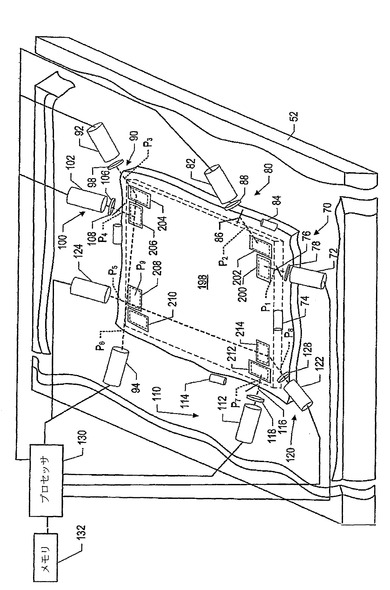
図4を参照すれば、iMAT(商標)62は、参照符号70、80、90、100、110、120によって示されている複数の検出システムと、照明源94、124を含んでいる。検出システム70、80、90、100、110、120のそれぞれは、検出器72、82、92、102、112、122をそれぞれ含んでいる。検出システム70、80、100、110のそれぞれは、参照符号74、84、104、114によって示された照明源をそれぞれ含んでいる。照明源74、84、94、104、114、124のそれぞれは、検出器72、82、92、102、112、122がそれぞれ光学的な通信状態にある(即ち、視野内に位置している)テンプレート52の領域上の光などの入射エネルギーに結合されている。具体的には、検出器72は、合焦オプティクス78と半鍍銀(50/50)ミラー76を通じてモールド198上に配置されたアライメントマークを有するテンプレート52の領域200と光学的な通信状態にある。
【0014】
照明源74は、半鍍銀(50/50)ミラー76上に入射する光学エネルギーを生成し、この結果、このエネルギーは、経路p1に沿って導かれて領域200を照明している。領域200上に入射する光学エネルギーの一部は、経路p1に沿って戻り、半鍍銀ミラー76を通過して、合焦オプティクス78により、検出器72上に合焦される。同様に、検出器82は、経路p2に沿って戻る照明源84によって生成された光学エネルギーを検知するための半鍍銀(50/50)ミラー86と合焦オプティクス88により、領域202との光学的な通信状態に配置されている。検出器102は、経路P4に沿って戻る照明源104によって生成された光学エネルギーを検知するための半鍍銀(50/50)ミラー106と合焦オプティクス108により、領域206との光学的な通信状態に配置されている。検出器112は、経路P7に沿って戻る照明源114によって生成された光学エネルギーを検知するための半鍍銀(50/50)ミラー116と合焦オプティクス118により、領域212との光学的な通信状態に配置されている。このように、検出器システム70、80、100、110は、同軸型の照明と検出を利用している。検出器72、82、102、112として使用する模範的なシステムは、XEES50、XEHR58、及びXE75という型番において、Sony, Inc.社から入手可能である。
【0015】
モールド198のエリア全体が露光され、化学作用を有する放射線がこれを通じて伝播できるようにするように、検出器72、82、92、102、112、122や、照明源74、84、94、104、114、124、光学ユニットのその他のコンポーネントは、いずれも重畳した状態にはない。このために、経路P1〜P8のそれぞれは、モールド198の垂線に対して2°〜15°の範囲内の角度を形成している。このような構成により、検出器72、82、92、102、112、122のそれぞれは、実質的にその他の次数のすべてのその他の波長を拒絶しつつ、領域200、202、204、206、212、214からそれぞれ伝播する放射線の所望の波長を検知するように構成されている。例えば、検出器72、82、92、102、112、122のそれぞれは、1つの次数(例えば、実質的にその他の次数のすべてのその他の波長を拒絶しつつ、領域200、202、204、206、212、214からの光の1次、又は、更に高次の回折波長)を検知するように構成されている。
【0016】
但し、検出システム90、120は、同軸型の照明と検出を利用してはいない。即ち、検出システム90、120用の照明源は、検出器の反対側に配置されている。例えば、照明源94は、エネルギーを経路P6に沿って導いて領域204上に入射させている。領域204から戻るエネルギーの一部は、経路P3に沿って伝播し、光学トレイン98によって収集されており、この光学トレインは、このエネルギーを検出器92上に合焦している。同様に、照明源124は、エネルギーを経路P5に沿って導いて領域214上に入射させており、これから戻るエネルギーの一部は、経路P8に沿って伝播している。この経路P8に沿って伝播するエネルギーは、光学トレイン128によって収集され、この光学トレインが、これを検出器122上に合焦している。これらの非同軸型の照明ユニットを使用することにより、その他の同軸型の照明ユニットよりも高速で画像をキャプチャ可能である。反対方向から照明することにより、ビームは、50/50ミラーを通過したり又はこれによって反射されることがない。この結果、相対的に大きな照明エネルギーが検出器に到達可能である。相対的に高速の画像生成のためには、検出器に到達するビーム強度を極大化することが望ましい。尚、模範的な検出システムは、型番1M150、1M75において、カナダのWaterlooに所在するDarsa Corporation社から入手可能である。
【0017】
尚、6つの検出システム70、80、90、100、110、120が示されているが、対象とする空間パラメータに応じて、任意の数の検出システムが存在可能である。例えば、2つの検出システムを配置することによって領域200、202、204、206、208、210、212、214の中の共通領域から情報を検知できるように、6つを上回る数の検出システムを利用可能であり、この結果、8個、10個、12個の検出システムが存在することになろう(図示されていない)。又、検出システム70、80、90、100、110、120のそれぞれにより、領域200、202、204、206、208、210、212、214の中の複数のものから同時に情報を入手することも可能である。このように、検出器により、高度な冗長性を有するデータの組を収集可能である。
【0018】
検出器72、82、92、102、112、122のそれぞれは、検知された光学エネルギーに応答して信号を生成し、この信号は、その検出器とデータ通信状態にあるプロセッサ130によって受信される。プロセッサ130は、このプロセッサとデータ通信状態にあるメモリ132内に保存されているコンピュータ可読コードに基づいて動作しており、モールド26と、そのモールドとの重畳状態にあるパターニングの実行対象である基板56の領域69などの2つの座標系の間の相対的な空間パラメータを決定する。領域69のエリアは、通常、モールド198のエリアと同一の広がりを有している。
【0019】
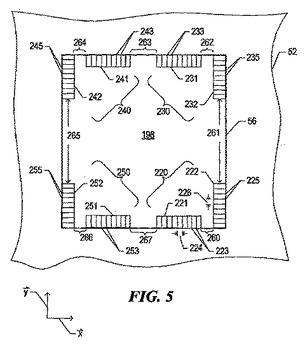
図5を参照すれば、モールド26のそれぞれのコーナーには、参照符号220、230、240、250として示されているアライメントマークの組が配置されている。アライメントマークのそれぞれの組は、1つの方向に沿って離隔した複数の平行ラインから構成されるテンプレートアライメントマーク要素(Template Alignment Mark Element:TAME)を含んでおり、TAMEの中の1つと関連付けられている複数のラインが沿って離隔している方向は、残りのTAMEと関連付けられている複数のラインが沿って離隔している方向と直交している。例えば、組220は、TAME221と222を含んでいる。TAME221は、ピッチ224でX方向に沿って離隔した複数の平行ライン223を含んでいる。TAME222は、ピッチ226でY方向に沿って離隔した複数の平行ライン225を含んでいる。同様に、TAME231のライン233は、TAME241のライン243とTAME251のライン253と同様に、X方向に沿って離隔している。TAME232のライン235は、TAME242のライン245及びTAME252のライン255と同様に、Y方向に沿って離隔している。
【0020】
図4、図5の両方を参照すれば、それぞれのTAME221、222、231、232、241、242、251、252は、領域200、202、204、206、208、210、212、214の中の1つと一意に関連付けられている。具体的には、アライメントマークのペア220、230、240、250のペアの1つと関連付けられている隣接するアライメントマークの間の離隔は、隣接するTAMEと関連付けられている領域内には存在しないように設定されている。例えば、TAMEと領域のそれぞれの相対的な寸法は、TAME全体がその領域内に存在するように設定されている。この結果、TAME221は、領域200と関連付けられており、TAME222は、領域202と関連付けられており、TAME232、231は、それぞれ、領域204、206と関連付けられている。TAME241、242は、それぞれ、領域208、210と関連付けられており、TAME252、251は、それぞれ、領域212、214と関連付けられている。但し、TAME221が領域214、202の両方の外に位置し、且つ、TAME251、222の両方が、領域200の外に位置するように、隙間260、267が設定されている。この結果、検出器72によって検知される(領域202、214、並びに、遠い領域204、206、208、210、212などの)領域200の外部から戻ってくるエネルギーの量が極小化される。同一の理由から、TAME232が領域202、206の両方の外に位置し、且つ、TAME231、222が領域204の外に位置するように、隙間261、262が設定されている。TAME241が領域206、210の両方の外に位置し、且つ、TAME231、242の両方が領域208の外に位置するように隙間263、264が設定されている。TAME252が領域210、214の外に位置し、且つ、TAME242、251の両方が領域212の外に位置するように隙間265、266が設定されている。
【0021】
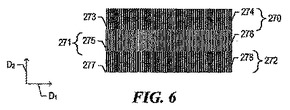
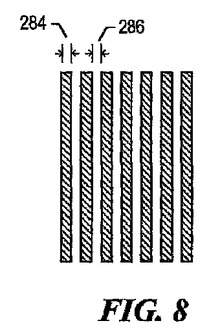
図5、図6の両方を参照すれば、TAME221、222、231、232、241、242、251、252のそれぞれは、平行ラインの単一の組を有しているが、それぞれは、平行ラインの任意の数の組(例えば、1−n個の組(この場合にnは、整数である))の組を有することができる。この結果、TAME221、222、231、232、241、242、251、252の中の1つ又は複数のものは、平行ラインの複数の組から構成可能である。この実施形態においては、TAME221、222、231、232、251、252は、それぞれ、それぞれの間の離隔が極小化されるように接触した関係にある参照符号270、271、272によって示された平行ラインの3つの組を含んでいる。平行ラインの隣接するペア間における離隔(又は、ピッチ)は、組270、272、274の長さにわたって実質的に一定であり、組270は、反対側に位置する終点273、274の間の長さにわたって延びており、組271は、反対側に位置する終点275、276の間の長さにわたって延び、組272は、反対側に位置する終点277、278の間の長さにわたって延びている。尚、組270、271、272は、互いに同一の広がりを有するように延びるように示されているが、これは必須ではない。
【0022】
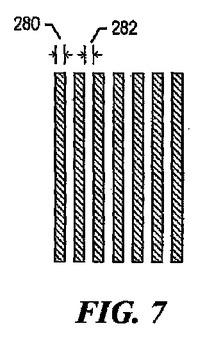
図6、図7、図8を参照すれば、組270、271、272の中の1つと関連付けられた方向D1に沿って計測されるピッチは、残りの組270、272、272と関連付けられているピッチとは異なっている。この例においては、組270、272と関連付けられているピッチは整合しているが、組271と関連付けられているピッチは、組270、272と関連付けられているピッチとは異なっている。例えば、組270と組272は、それぞれ、方向D1に沿って計測される幅が約1ミクロンである幅280を有する41個の平行ラインを具備している。隣接しているラインは、方向D1に沿って計測される約1ミクロンの隙間282だけ離隔しており、この結果、2ミクロンのピッチを提供する40個の隙間を具備した組270、272が得られている。組271は、方向D1に沿って計測される幅が約1.025ミクロンである幅284を有する39個の平行ラインを具備している。隣接しているラインは、約1.025ミクロンの方向D1に沿って計測される隙間286だけ分離しており、この結果、2.05ミクロンのピッチとなっている40個の隙間を具備した組271が得られている。方向D2に沿って計測されるラインの長さは、約45ミクロンである。
【0023】
図3、図6、図9を参照すれば、モールド198と領域69の間の相対的な空間パラメータを決定するように、アライメントマーク66は、基板アライメントマーク要素(Substrate Alignment Mark Element:SAME)166と呼ばれる複数のアライメントマーク要素を含んでいる。SAME166の少なくとも1つは、TAME221、222、231、232、241、242、251、252の中の1つと重畳状態にあり、且つ、これと同一の広がりを有するように延びている。この実施形態においては、TAME221、222、231、232、241、242、251、252のそれぞれは、複数のSAME166の中の1つと重畳状態にある。具体的には、SAME166の中の1つと重畳状態にあるそれぞれのTAME221、222、231、232、241、242、251、252は、残りのSAME166と重畳状態にあるTAME221、222、231、232、241、242、251、252とは異なっている。
【0024】
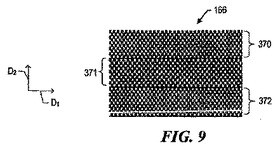
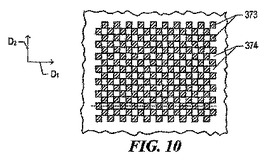
図4、図6、図9、図10を参照すれば、模範的なSAME166は、TAME221、222、231、232、241、242、251、252との関係において前述したように、離隔した平行ラインの単一の組から構成可能である。但し、経路P1〜P4及びP7〜P8の1つに沿って伝播する1次回折波長をモールド198の垂線に対して傾斜した角度において収集することが望ましい。このために、チェッカーボードパターンとよばれる2つの直交方向において周期性を有するパターンが利用されている。更には、参照符号370、371、372によって示されているチェッカーボードパターンの3つの組を利用することが望ましい。チェッカーボードパターンの3つの組370、371、372は、それぞれの間の離隔が極小化されるように接触した関係にある。それぞれのチェッカーボードパターンは、複数のフィーチャ373を含んでおり、このそれぞれは、その形状が略矩形である。隣接するフィーチャのそれぞれのペアは、隙間374によって分離されている。組370、372内の方向D1に沿ったフィーチャ373の隣接するペアの間の離隔(又は、ピッチ)は、組271のピッチに実質的に同一である。組371内の方向D2に沿ったフィーチャ373の隣接するペア間の離隔(又は、ピッチ)は、組270、272のピッチと実質的に同一である。
【0025】
0次の鏡面反射波長に対する傾斜した角度を有する経路に沿って伝播する波長の検知を円滑に実行するように、選択される傾斜角度は、SAME166およびTAME221、222、231、232、241、242、251、252の形状と、検知対象である回折波長の次数に依存している。例えば、モールド198と領域69の間の距離とは実質的に無関係に情報を入手するには、1次回折波長は、例えば、モールド198の垂線に対して2°〜15°の範囲内の傾斜角度を有する。このためには、方向D2に沿って計測される隣接するフィーチャ373のペアのピッチは、約2.2ミクロンである。この構成により、基板アライメントマーク166との重畳状態にあるTAME221、222、231、232、241、242、251、252の中の1つの配置は、結果的に、組370と重畳関係にあると共に、これと同一の広がりを有するように延びる組270と、組371との重畳状態にあると共に、これと同一の広がりを有するように延びる組271と、組372との重畳状態にあると共に、これと同一の広がりを有するように延びている組272をもたらすことになる。TAMEとSAMEの通常の寸法は、方向D1に沿っては、最大400ミクロンであり、方向D2に沿っては、150〜250ミクロンであってよい(即ち、平行ラインのそれぞれは、その長さが150〜250ミクロンである)。これらは、例えば、D1に沿っては、100ミクロンであり、長さは、40ミクロンであるなど、その寸法が大幅に小さなものであってもよい。或いは、この代わりに、D1に沿った寸法が更に大きく(〜1mm)、且つ、D2に沿った寸法が更に小さいものであってもよい(〜40ミクロン)。
【0026】
図4、図6、図9、図11を参照すれば、SAME166との重畳状態に配置された際に、方向D1は、TAME221、231、241、251と、これらとの重畳状態にあるSAEM166の場合には、X方向に対して平行に延びている。TAME222、232、242、252と、これらと重畳状態にあるSAEMの場合には、方向D1は、Y方向に対して平行に延びている。この結果、それぞれのTAME221、222、231、232、241、242、251上に入射する光は、回折し、この結果、これらと光学的な通信状態にある検出器72、82、92、102、112、122の中の1つが1次回折波長を検知する。例えば、TAME221から回折された光は、検出器72によって検知され、TAME222から回折された光は、検出器82によって検知され、TAME232から回折された光は、検出器92によって検知され、TAME231によって回折された光は、検出器102によって検知され、TAME251によって回折された光は、検出器122によって検知され、TAME252によって回折された光は、検出器112によって検知される。通常、アライメントは、接触状態液体アライメント(in contact liquid align)と呼ばれるモールド198と領域69の間の容積を実質的に充填した重合体材料の存在下において発生する。このために、重合体材料は、TAME221、222、231、232、241、242、251の中の1つと、これとの重畳状態にあるSAME166の間に配置されていないことが望ましい。このために、「Moat System For An Imprint Lithography Template」という名称の2004年8月13日付けで出願された米国特許出願第10/917,761号に開示されているテンプレートをテンプレート52として利用することが望ましいであろう(この出願は、本発明の譲受人に譲渡されており、この内容は、本引用により、本明細書に包含される)。
【0027】
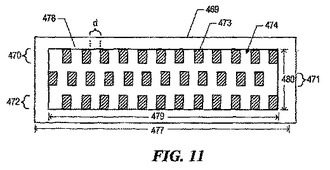
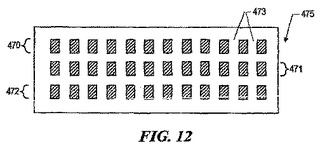
1次回折光を検知した際に、検出器72、82、92、102、112、122のそれぞれは、図11に示されている隣接する高強度領域473が低強度領域474によって距離dだけ離隔している空間的に変化する光強度470、471、472という3つの系列の画像469を入手する。系列470は、組270、370の重畳によって生成された回折光に対応している。同様に、系列471は、組271、371の重畳に対応しており、系列472は、組272、372の重畳に対応している。領域69とモールド198の間における望ましい空間的な配列は、テンプレートと基板の相対的な幾何学的情報に対応した特定のオフセットを生成するように配置された系列470、471、472の中の高強度領域473上に存在している(これは、望ましいものである場合もあり、単純にミスアライメントを通知している場合もある)。
【0028】
図4、図11、図12を参照すれば、画像469、475などの画像の検知に応答し、検出器72、82、92、102、112、122のそれぞれは、信号を生成し、この信号がプロセッサ130によって受信される。この結果、6つの信号がプロッサ130によって受信される。但し、以下の説明においては、残りの検出器72、82、92、102、112、112によって生成されるそれぞれの信号に関してもこのプロセスが発生するという理解の下に、わかりやすくするように、検出器72、82、92、102、112、122によって生成される信号の中の1つとの関連において、このプロセスについて説明する。信号は、検出器72、82、92、102、112、122によってキャプチャされた情報(即ち、視野内の情報)のすべてを含んでいる。検出器72、82、92、102、112、122のそれぞれの視野は、参照符号477に沿って計測した場合に、約758ミクロンであり、参照符号480に沿って計測した場合には、約500ミクロンである。メモリ132内に保存されているプログラムは、プロセッサ130によって実行されることにより、関心領域478を識別する(この関心領域は、視野の一部分であり、この内部においては、その関係している組470、471、472以外の実質的にすべての情報が除外されている)。このために、両方の方向に沿ってピクセルの偶数倍となるように、関心領域(Region Of Interest:ROI)が設定されている(参照符号479に沿っては、695ピクセルであり、参照符号480に沿っては、192ピクセルである)。この結果、ROI 478の寸法は、TAME221、222、231、232、241、242、251、252と、TAME166に関連付けられている寸法の関数である。
【0029】
系列470、471、472のサイズは、TAME221、222、231、241、242、251、252のサイズに対応しており、これは、TAME166のサイズに等しい。ROI 478の寸法は、SAME166とTAME221、222、231、232、241、242、251、252と関連付けられている幅と高さを検出器72、82、92、102、112、122のピクセルのサイズによって除算することによって設定される。更には、方向480に沿ったROI 478の寸法は、系列470、471、472の数(これは、この例においては、3である)の偶数倍となるように選択される。
【0030】
ピクセルのそれぞれは、0〜255の範囲内の関連付けられた値を具備可能である。ピクセル値は、メモリ132内のメモリ空間と呼ばれる場所にマッピングされる。この結果、それぞれの系列470、471、472ごとに、695列x64行に配列された0〜255からの値を具備したアレイとしてメモリ空間内にマッピングされることになる。従って、メモリ132は、検出器72、82、92、102、112、122によって検知された画像に対応するその内部にマッピングされた値の3つのアレイを具備している。
【0031】
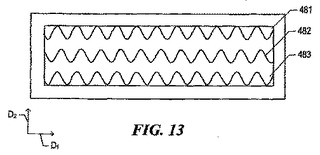
メモリ空間内にマッピングされた3つのアレイのそれぞれごとに、695個の値の1次元のアレイを生成する。これは、695列のそれぞれごとに、64行と関連付けられている値の平均値を入手することにより、実現される。これは、それぞれ、系列470,471、472から得られる情報481、482、483の実質的に3つの正弦波表現に対応している。これらの正弦波のそれぞれを時変信号として取り扱い、ピクセル0〜694に対応するアドレス間においてウィドウ化された高速フーリエ変換(Fast Fourier Transform:FFT)又は離散フーリエ変換(Discrete Fourier Transfor:DFT)を利用することにより、周波数ドメインにマッピングする。その後、ROI内に存在している整数の周期と関連付けられたビン内の情報を分析する。前述のビン内の値のATAN2関数を決定することにより、それぞれの正弦波信号481、482、483と関連付けられている位相値φ1、φ2、φ3をそれぞれ見出す。ROI 478の原点(即ち、ROI 478が始まっているところ)との関係において、−π〜πの値を具備する位相値φ1、φ2、φ3を決定する。
【0032】
正弦波481、482、483の間の位相値の差は、次のように決定する。
【0033】
Δ1=φ1−φ2 (1)
Δ2=φ3−φ2 (2)
【0034】
解く必要があるのは、式1及び式2の中の1つのみであるが、2つの差動位相値を入手することにより、位相差計測値の分解能が倍増する。検出器72、82,92、102、112、122に起因したエラーが低減しない場合に、これを減衰させるように、式1及び式2において決定された差の平均を次のように決定する。
【0035】
(Δ1−Δ2)/2=Δ3 (3)
【0036】
次いで、正弦波418、482、483の間の絶対位相差Δ4を次のように得る。
【0037】
Δ3/2=Δ4 (4)
【0038】
式(4)から、テンプレート56とモールド198の間の対応する線形変位Dを位相Δ4から次のように決定可能である。
【0039】
D=P1P2Δ4/4π(P1−P2) (5)
【0040】
この場合に、P1は、方向D1に沿ったSAME371及びTAME270、272と関連付けられているピッチであり、P2は、TAME271及びSAME370、372と関連付けられているピッチである。このように、検出器72、82、92、102、112、122は、領域69とモールド198の間の6つの異なる変位計測値(即ち、領域200、202、204、206、212、214のそれぞれからの1つの計測値)に関する情報の取得を円滑に実行する。これらの6つの変位計測値から、モールド198と領域69に関する様々な相対的空間パラメータを「Analysis of Overlay Distorion Patterns」(SPIE、921巻、208〜222頁、1988年)にArmitage, Jr.他が記述しているように、決定可能である(この内容は、本引用により、本明細書に包含される)。模範的な空間パラメータは、2つの直交する方向(例えば、X、Y方向)に沿った線形ミスアライメント、これらに直交する方向に延びる第3方向(例えば、Z方向)に沿った回転ミスアライメント、倍率差と呼ばれるエリアの差、モールド198と領域69の周囲の間における直交性の差である。これらの空間パラメータは、通常、テンプレートを製造する際に使用されるテンプレートと、従って、モールド198上におけるフィーチャの配置を定義する情報であるテンプレート設計内に存在する詳細なテンプレート配置データを基準として、モールド198上のフィーチャとの関連におけるTAME221、223、231、233、241、243、251、253の理想的な場所の間の関係の関数として突き止められる。このために、プロセッサ130によって実行されるように、テンプレート配置データに関係する情報がメモリ132内に保存されている。次の式により、最小二乗法を使用し、テンプレート配置データから相対的な空間パラメータを入手可能である。
【0041】
Xs=X0+SxXwcos(θ)+SyYwsin(θ)+Ywsin(φ) (6)
Ys=Y0−SxXwsin(θ)+SyYwcos(θ)+Xwsin(φ) (7)
【0042】
ここで、Xsは、式5から決定され、且つ、Xwが加算されたX方向に沿って計測された変位Dである。既知の量Xwは、モールド198のフィーチャとの関連における対象のTAMEのX方向に沿った理想的な場所である。同様に、既知の量Ywは、モールド198のフィーチャとの関連における対象のTAMEのY方向に沿った理想的な場所である。従って、Ysは式5から決定され、Ywが加算されたY方向に沿って計測された変位Dである。変数X0は、X方向に沿ったモールド198と領域69の間のオフセットである。同様に、変数Y0は、Y方向に沿ったモールド198と領域69の間のオフセットである。変数Sx、Syは、それぞれ、X、Y方向に沿ったモールド198と領域69の間の差である。変数θは、Z軸を中心としたモールド198と領域69の間の回転位置の差である。変数φは、モールド198の周囲と領域69の周囲の間おける直交性の差である。この結果、実質的にモールド198と領域69の間の距離とは無関係に(即ち、X−Y変位パラメータのみから)倍率/ランアウトパラメータと直交性パラメータを決定可能である。
【0043】
具体的には、モールド198と領域69の間の相対的な空間パラメータを決定した際に、プロセッサ130は、モールド198と領域69の間の望ましい重ね合わせが実現するように、制御信号を生成してステージ54、60の動作を調節する。重ね合わせは、検出器72、82、92、102、112、122が、領域200、202、204、206、212、214のそれぞれにおいて、望ましいオフセットを具備するものとしては、図11に、さらに、オフセットを具備していないものとしては、図12に示されている画像469又は475を検知することによって示される。通常のアライメントプロセスにおいては、前述の計測値は、モールド198と領域69の間の距離が変化するのに伴って(即ち、Z軸に沿って近接するのに伴って)取得される。例えば、モールド198と領域69が、4ミクロン、1ミクロン、又は(重合体材料によって実質的に充填される容積がこれらの間において定義される)最終的な距離だけ離隔している際に、計測及び制御信号を生成可能である。この結果、空間パラメータを決定可能であり、望ましくないモールド198と領域の間の相対的な空間パラメータを極小化するように、インプリンティングプロセスにおいてリアルタイムで制御信号を生成可能である。
【0044】
硬化又は架橋によるインプリンティング材料の硬化の際に、硬化に必要な光子により、モールド198と領域69に加熱が発生する。硬化用の光の強度が妥当な程度に均一に維持されておれば、モールド198と領域69は、均一に加熱される。不均等な加熱及び/又は不均等なCTEの場合には、インプリンティング材料が基板に接着する固体のように振舞うように固まっていないポイントまで露光された際に、アライメントのミスマッチが発生する可能性がある。但し、平均ミスアライメントは、シミュレーションによって、或いは、前述のアライメント計測システムを使用することによって推定可能であり、硬化の直前に、iMAT62を使用することにより、望ましいスケーリング(倍率)のミスマッチが実現されるように、モールド198又は領域69のサイズを事前に補正可能である。尚、アライメントの測定に使用される波長は、硬化用の光とは実質的に異なっている必要があり、これが望ましい。
【0045】
前述の正弦波481、482、483の位相を決定するためのフーリエ分析の実装に基づいて、これらの計測値の精度がROI 478の適切な決定に部分的に依存していることが明らかである。これは、系列470、471、472に関するすべての情報が得られるようにするためである。このためには、ROI 478が基準座標系の対応する基準点のピクセル距離内に収まるように設定することが望ましい。この例においては、基準座標系は、モールド198であるが、基準座標系は、領域69であってもよいことを理解されたい。この結果、この例においては、ROI 478は、モールド198上の対応する基準点のピクセル距離内に収まるように設定されている。この結果、系列470、471、472との関連におけるROI 478の適切な重ね合わせが保証される。
【0046】
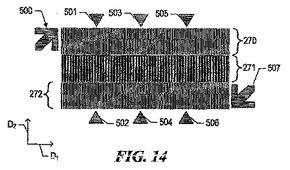
但し、ROI 478の望ましい重ね合わせは、問題である。これは、モールド198の垂線に対する傾きを形成している経路に沿って伝播する領域200、202、204、206、212、214からの1次回折波長を収集するように構成された検出器72、82、92、102、112、122のそれぞれと関連付けられた収集オプティクスに起因している。この結果、それぞれ、照明源74、84、94、104、114、124から領域200、202、204、206、212、214上に入射する光は、結果的に、重畳状態にあるSAME166が存在していない状態においては、それぞれ、TAME221、222、231、232、241、242、251、252に対応する非常にわずかな情報しかもたらさない。更には、TAME221、222、231、232、241、242、251、252と領域200、202、204、206、212、204の適切な重ね合わせが存在していない状態におけるTAME221、222、231、232、241、242、251、252の中の1つとの重畳状態にあるSAME166の適切な位置決めも問題である。この問題を克服するための1つの方式は、2段階重ね合わせプロセスを実装してROI 478の正確な配置を得る方法である。第1段階においては、数ピクセルサイズの分解能において、コースアライメントを実現する。具体的には、このコースアライメント方式においては、領域69のウエハに対するモールド198の配置を1周期481、482、483以内において実現する必要がある。低CTE(例えば、インバー又はゼロデュアー材料)を具備した構造的な支持によってiMAT62にリンクされている高開口数を具備する軸外し型の画像生成システムが望ましい。又、iMAT62と軸外し型カメラ(図示されてはいない)間の相対的な場所に対する振動の影響が極小化されるように、適切に強力な台が望ましい。本実施形態においては、組270、271、272のピッチに対して直交するように計測されたピッチを具備する格子を定義する離隔した平行ラインの複数のグループ500〜507をモールド198上に包含することにより、このコースアライメントを実現している。
【0047】
グループ500、507は、矢印の形状に構成されており、グループ500のポイントは、系列270のコーナーに近接しており、グループ507のポイントは、系列272のコーナーに近接しており、グループ500の反対側に配置されている。グループ501〜506は、D1方向に沿って均等に離隔しており、このそれぞれは、三角形の形状に構成されている。グループ501、503、505のそれぞれの頂点は、系列270に近接して配置されており、これに対向している。グループ502、504、506のそれぞれの頂点は、系列272に近接して配置されており、これに対向している。グループ500〜507と関連付けられている離隔した平行ラインには、検出器72、82、92、102、112、122による検知を円滑に実行するのに不可欠なピッチと寸法が提供されている。グループ500〜507のピッチは、1次(又は、必要に応じて、更に高次の)回折波長を検出器によって収集及び検知できるように、チェッカーボードのピッチと同一であってよい。
【0048】
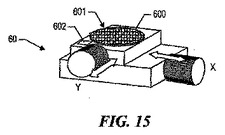
図5、図10、図14、図15を参照すれば、このグループ500〜507の構成により、前述の位相演算を実現するのに十分な状態にROI 478を位置づけ可能である。その後、視野を検出器72、82、92、102、112、122と適切に重ね合わせるように、前述の絶対位相差Δ4を入手することによって微細なアライメントを実行する。このために、オーバーサイズのチェックボードパターン(OCP)600をモールド198と重畳状態となるように配置する。このOCPは、そのそれぞれが隙間374によって分離されたフィーチャ373を具備する組370、371、372を含む。組370、371、372のいずれか1つの寸法は、実質的にモールド198のエリアよりも、エリアが大きくなるように設定可能である。この結果、TAME221、222、231、232、241、242、251、252の中の1つ又は複数のものとの重畳状態にOCP600の組370、371、372の中の1つを配置するためのアライメント公差を緩和可能である。このために、OCP600の組370、371、372のいずれか1つは、同時にTAME221、222、231、232、241、242、251、252のそれぞれ又はそのサブセットとの重畳状態となるように、十分に大きなものであってよい。この構成により、OCP600は、1つ又は複数のTAME221、222、231、232、241、242、251、252との重畳状態において、且つ、それらとの間のその正しい向きにおいて配置され、望ましい1次回折波長を生成して適切な重ね合わせを実現するように、X、Y軸に沿って移動すると共に、Z軸を中心として回転可能である。或いは、この代わりに、OCP600は、組370、371、372の中の1つのみを含む。この結果、OCP600は、基板56と同一の広がりを有すると共に、基板56が支持されるステージ60の領域601内に配置可能である。この結果、OCP600は、単にZ軸を中心として回転することにより、検出器によって検知される1次回折を円滑に実行して適切な重ね合わせを計測する。或いは、この代わりに、OCP600は、領域601外において、ステージ60の領域602上に配置することも可能である。この構成により、OCP600は、X、Y軸に沿って移動すると共に、Z軸を中心として回転することにより、1つ又は複数のTAME221、222、231、232、241、242、251、252との重畳状態において、且つ、それらとの間の適切な向きにおいて配置され、望ましい1次回折波長を生成して適切な重ね合わせを実現可能である。
【0049】
図4、図5、図16を参照すれば、代替実施形態においては、複数のグループ500〜507を省略した状態において、ROI 478の適切な重ね合わせを実現可能である。具体的には、この例は、1次回折波長ではなく、検出器72、82、92、102、112、122による鏡面反射光の検知を利用している。尚、この方法は、検出器72との関連において説明することとするが、複数の検出器72、82、92、102、112、122の中の残りの検出器にも等しく適用される。検出器72、82、92、102、112、122の中の1つが光束の大きな変化を検出するまで照明源800を移動させる。このためには、領域601は、照明源800によって生成された照明に対する反射性を有することが望ましい。望ましいエネルギー束を検知した際に、検出器72と照明源800の相対的な位置をロックし、これにより、この両方がモールド198のエリア上を同期して移動し、TAME221、223、231、233、241、243、251、253の中の1つ(この場合には、TAME221)を照明及び検知するようにする。その後、検出器72の位置をTAME221に対して固定し、残りの検出器の中の1つ(例えば、検出器82、92、102、112、122)が光束の大きな変化を検知する位置に供給源880を移動させる。そして、このプロセスを反復する。検出器72、82、92、102、112、122のそれぞれの位置がTAME221、223、231、232、241、242、251、252との関連において固定された後に、前述の微細アライメント技法を実行してROI 478を適切に重ね合わせする。
【0050】
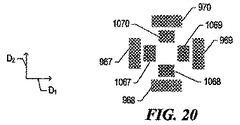
図5、図6、図17、図18を参照すれば、SAME166及びTAME221、223、231、233、241、243、251、253は、任意の数のアライメントマークの設計から構成可能である。例えば、SAME766は、離隔した格子要素の2つのペア767、768、769、770を含む。図示のように、格子要素767、769は、エリア内において同一の広がりを有しており、方向D2に沿って互いに重畳状態にあり、且つ、方向D1に沿って互いに離隔している。格子要素767、769のそれぞれは、方向D2に沿って離隔した平行ラインの系列を含んでいる。格子要素768、770は、エリア内において同一の広がりを有しており、方向D1に沿って互いに重畳状態にあり、且つ、方向D2に沿って互いに離隔している。格子768、770のそれぞれは、方向D1に沿って離隔した平行ラインの系列を含んでいる。一方、TAME221、223、231、233、241、243、251、253の1つ又は複数のものは、離隔した格子要素867、868、869、870の2つのペア866を含むことにもなろう。図示のように、格子要素867、869は、エリア内において同一の広がりを有しており、方向D2に沿って互いに重畳状態にあり、且つ、方向D1に沿って、格子767、769が離隔している距離よりも小さい距離だけ互いに離隔している。格子要素867、869のそれぞれは、方向D2に沿って互いに離隔した平行ラインの系列を含んでいる。格子要素868、870は、エリア内において同一の広がりを有しており、方向D1に沿って互いに重畳状態にあり、且つ、方向D2に沿って、格子768、770が離隔している距離よりも小さい距離だけ互いに離隔している。格子868、870のそれぞれは、方向D1に沿って離隔した平行ラインの系列を含んでいる。この構成により、2つのペア866は、図19の参照符号966によって示されているように、基板領域69とモールド198の適切な重ね合わせの際に、SAME766内に位置するように配置される。
【0051】
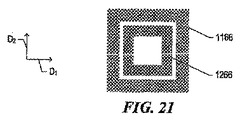
図17、図18、図20を参照すれば、格子766、767、768、769、868、867、869、870のそれぞれは、前述したように、且つ、格子967、968、969、970や、1067、1068、1069、1070として示されているように、チェッカーボードパターンを含む。最後に、図21に示されているように、格子1067、1068、1069、1070によってボックス1266を形成可能であると同時に、格子967、968、969、970を隣接するように形成することにより、ボックス1166とすることも可能である。
【0052】
本明細書に提示されているアライメント方式は、計測信号の品質を大幅に損なうことなしにはそのパラメータが正確に判明しない光学要素が存在している状況において使用可能である。例えば、テンプレートは、公称厚さが1〜10mmであってよく、その厚さの公差は0.1mm以上であってよい。更には、インプリントシステムは、それを通じたアライメントの実行を要する追加ウィンドウを備え、この光学特性は変化可能である。例えば、1mmの厚さの透明なウィンドウを空気圧に晒し、アライメントプロセスにおいて値を変化させることにより、これに応力を加えることが可能である。
【0053】
前述の本発明の実施形態は例示的なものである。本発明の範囲を逸脱することなしに、先程引用された開示内容に対して多くの変更や変形を実施可能である。例えば、傾斜した照明源が、等しいが反対の角度において傾斜している検出器に対してマークから反射される場合には、0次信号を使用することにより、前述のアライメントマーク構成のそれぞれの画像を生成可能である。或いは、この代わりに、これらのマークのパターニングされた領域を平行ラインから生成して傾斜した検出システムからのこれらの1次(又は、更に高次の)回折信号を画像生成する能力を向上させるように、これらのマークを生成することも可能である。SAMEの領域は、TAMEが対応している場合には、中空のボックスであるか、又は非中空のボックスを有するクロスであるか、又はクロスの形状であってよく(又は、この逆)、且つ、TAMEがユニバーサルなアライメントターゲットである場合には、これに対応するターゲットであってよい。SAMEのターゲットは、0次画像生成を実行する場合には、非中空のフィーチャを具備している。傾斜した照明により、傾斜した収集オプティクスを使用して0次画像生成を実現可能である。高次の画像生成を実行する場合には、傾斜した収集オプティクスの向きの関数として適切な向きを有する平行ラインの複合物としてターゲットを生成可能である。従って、本発明の範囲は、以上の説明によって限定されるものではなく、添付の請求項及びその等価物の完全な範囲を参照して決定することを要するものである。
【図面の簡単な説明】
【0054】
【図1】従来技術によるインプリントリソグラフィーシステムの概略平面図である。
【図2】従来技術による、重畳状態にあるモールドを有する、上部に配置された複数のレイヤを具備したパターニング済みの基板の断面図である。
【図3】本発明によるインプリントリソグラフィーシステムを示すブロックダイアグラムである。
【図4】上から見下ろした観点から示されている、テンプレートを有する、本発明による図3に示されている干渉分析ツールのコンポーネントを示す部分透視図及び部分ブロックダイアグラムである。
【図5】本発明による図4に示されているテンプレートの平面図である。
【図6】図5に示されているアライメントマーク要素内に包含可能なフィーチャの複数の系列を示す平面図である。
【図7】図6に示されているフィーチャの系列の中の1つ又は複数のものと関連付け可能な第1ピッチを具備するアライメントマークフィーチャの詳細図である。
【図8】図6に示されているフィーチャの系列の中の1つ又は複数のものと関連付け可能な第2ピッチを具備するアライメントマークフィーチャの詳細図である。
【図9】図3に示されている基板アライメントマーク要素内に包含可能なフィーチャを示す平面図である。
【図10】図9に示されているフィーチャの系列の中の1つ又は複数のものと関連付けられたアライメントマークフィーチャの詳細図である。
【図11】図6、図9に示されているアライメントマークフィーチャが重畳状態にあり、且つ、非ゼロのオフセットを有している際に、図4に示されている検出器の1つ又は複数のものによって検知される画像を示す平面図である。
【図12】図6、図9に示されているアライメントマークフィーチャが重畳状態にあり、且つ、ゼロのオフセットを有している際に、図4に示されている検出器の中の1つ又は複数のものによって検知される画像を示す平面図である。
【図13】図11の画像に応答し、図4に示されている検出器の中の1つのものによって生成される強度信号を示すグラフィカルな図である。
【図14】本発明による代替実施形態による図9のフィーチャを示す平面図である。
【図15】本発明の一実施形態による図3に示されているステージの概略透視図である。
【図16】本発明の代替実施形態によるテンプレートアライメントマークとの関連における検出器のコースアライメント調節の一方法を示す概略平面図である。
【図17】代替実施形態による図3に示されている基板アライメントマーク要素内に包含可能なフィーチャを示す平面図である。
【図18】代替実施形態による図5に示されているアライメントマーク要素内に包含可能なフィーチャの複数の系列を示す平面図である。
【図19】重畳状態にある際に図17、図18に示されているアライメントマーク要素の結果として得られるアライメントマークの構成を示す平面図である。
【図20】第1代替実施形態による図19に示されているアライメントマークの構成を示す平面図である。
【図21】第2代替実施形態による図19に示されているアライメントマークの構成を示す平面図である。
【技術分野】
【0001】
本発明の分野は、一般に、構造のナノレベルにおける製造に関するものである。更に詳しくは、本発明は、ナノスケールのデバイスの製造に好適な重畳状態にある複数のパターンの分析を円滑に実行するシステムに関するものである。
【背景技術】
【0002】
ナノスケールの製造は、例えば、1ナノメートル以上のレベルのフィーチャを具備した非常に小さな構造の製造を伴っている。ナノスケールの製造に使用する有望なプロセスは、インプリントリソグラフィーと呼ばれている。模範的なインプリントリソグラフィープロセスについては、「Method and a Mold to Arrange Features on a Substrate to Replicate Features having Minimal Dimensional Variability」という名称の米国特許出願第10/264,960号として出願された特許文献1、「Method of Forming a Layer on a Substrate to Facilitate Fabrication of Metrology Standards」という名称の米国特許出願第10/264,926号として出願された特許文献2、及び「Method and a Mold to Arrange Features on a Substrate to Replicate Features having minimal Dimensions Variability」という名称の米国特許出願第10/235,314号として出願された特許文献3(これらは、いずれも、本発明の譲受人に譲渡されたものである)などの多数の文献に詳述されている。
【0003】
図1を参照すれば、インプリントリソグラフィーの背後にある基本的な概念は、特にエッチングマスクとして機能可能なレリーフパターンを基板上に形成し、これにより、このレリーフパターンに対応したパターンを基板内に形成できるようにすることである。レリーフパターンを形成するために利用されるシステムは、基板12を支持するステージ10を含んでいる。テンプレート14は、パターニング表面18を有するモールド16を具備している。パターニング表面18は、実質的に滑らかであると共に/又は、平坦であって、或いは、パターニングすることによって1つ又は複数の凹部をその内部に形成することも可能である。テンプレート14は、テンプレート14の動きを促進させるようにインプリントヘッド20に結合されている。重合体材料24を堆積させるように基板12と流体連絡状態に選択的に配置されるように、流体供給システム22が設けられている。エネルギー28の供給源26が、経路30に沿ってエネルギー28を導くように設けられている。インプリントヘッド20とステージ10は、重畳状態になると共に経路30内に配置されるように、それぞれ、モールド16と基板12を配置するように構成されている。インプリントヘッド20、ステージ10、又はこれらの両方は、モールド16と基板12の間の距離を変化させることにより、これらの間に、重合体材料24によって充填される所望の容積を決めている。通常、重合体材料24は、モールド16と基板12の間に望ましい容積が決められる前に、基板12上に配置される。但し、望ましい容積が得られた後に、その容積を重合体材料24によって充填することも可能である。望ましい容積が重合体材料24によって充填された後に、供給源26は、エネルギー28を生成し、このエネルギーにより、重合体材料24は、基板表面24とモールド表面18の形状に従って凝固及び/又は架橋される。このプロセスの制御は、プロセッサ32によって調節されており、このプロセッサは、メモリ34内に保存されているコンピュータ可読プログラムに基づいて動作するステージ10、インプリントヘッド20、流体供給システム22、供給源26とのデータ通信状態にある。
【0004】
エネルギー28が重合体材料24上に入射できるように、モールド16は、エネルギー28の波長に対して実質的に透明であり、この結果、このエネルギーがモールドを通じて伝播可能であることが望ましい。更には、モールド16を通じて伝播するエネルギー束を極大化させるように、エネルギーは、経路30内における障害物の存在を伴うことなしに、モールド16のエリア全体をカバーするのに十分な断面を具備している。
【0005】
図1、図2を参照すれば、モールド16によって生成されるパターンは、既にパターンが存在している基板112上に形成されることが多い。このために、通常、表面42に配置された重合体材料24に、パターニングされたインプリントレイヤ(図示されてはいない)を形成するための(平坦でない場合には、滑らかな)表面42を提供するように、基板112に形成されている凹部38と突出40によって示されているパターニングされたフィーチャの上にプライマレイヤ36を堆積している。このために、モールド16と基板112は、アライメントマークを含んでおり、これらは、パターニングされたフィーチャの一部を含む。例えば、モールド16は、モールドアライメントマークと呼ばれるアライメントマークを備え、これらは、フィーチャ44、46によって決まる。基板112は、基板アライメントマークと呼ばれるアライメントマークを含み、これらは、フィーチャ48、50によって決まる。
【0006】
モールド16と基板112の間に適切なアライメントを確保しなければ、基板112上に記録されるパターンにエラーが導入される可能性がある。標準的なアライメントエラーに加えて、倍率/ランアウトエラーにより、特に、モールド16とパターニング対象である基板112の領域の間の小さな変動に起因し、記録されるパターンに歪が発生することがある。倍率/ランアウトエラーは、モールド16上のパターンを記録する対象である基板112の領域がモールド16上のパターンのエリアを上回っている際に発生する。又、倍率/ランアウトエラーは、モールド16のパターンを記録する対象である基板12の領域がオリジナルのパターンよりも小さなエリアを具備している際にも発生する。この倍率/ランアウトエラーの有害な影響は、1つの共通領域内に複数のパターンを形成する際に悪化する。モールド16上のパターンを記録する対象である基板112上の領域との関連において、基板112に対して垂直の軸を中心としてモールド16上のパターンを回転した場合には、更なるエラーが発生する。これは、方向エラーと呼ばれている。又、モールド16の周囲の形状が、パターンが記録される基板112上の領域の周囲の形状と異なっている際にも歪が発生する。これは、通常、モールド16及び/又は基板112の領域の横方向に延びる周囲のセグメントが直交していない際に発生する。これは、スキュー/直交性歪と呼ばれている。
【0007】
基板112上のパターンとモールド16によって生成されるパターンの間の適切なアライメントを確保するように、モールドと基板のアライメントマーク間における適切なアライメントを確保することが望ましい。これは、通常、例えば、同時に、モールド16と基板12の両方の光学的な通信状態に選択的に配置されるアライメントシステム53などの支援された眼を利用して実現されている。模範的なアライメントシステムは、接眼顕微鏡又はその他の画像生成システムを含んでいる。アライメントシステム53は、通常、経路30に対して平行な情報を入手している。そして、オペレータによって手動で(又は、ビジョンシステムを使用して自動的に)アライメントを実現している。
【0008】
【特許文献1】米国公開特許出願第2004−0065976号明細書
【特許文献2】米国公開特許出願第2004−0065252号明細書
【特許文献3】米国公開特許出願第2004−0046271号明細書
【発明の開示】
【発明が解決しようとする課題】
【0009】
従って、インプリントリソグラフィープロセス用の改善されたアライメント法を提供するというニーズが存在している。
【課題を解決するための手段】
【0010】
本発明は、2つの座標系の間の相対的な空間パラメータを決定するシステムと方法を特徴としており、これら2つの座標系は、モールドと、モールドを使用してパターンを生成する基板の領域と、である。このために、複数のポイントにおいて2つの座標系の間の相対的なアライメントを検知することにより、それらの間の相対的な空間パラメータを決定している。これらの相対的な空間パラメータは、相対的なエリアと相対的な形状を含んでいる。以下、これら及びその他の実施形態について更に詳細に説明する。
【発明を実施するための最良の形態】
【0011】
図3を参照すれば、本発明は、テンプレートステージ54内に保持されたテンプレート52と基板ステージ60上に支持された基板56を具備するインプリントリソグラフィーシステム50を含んでおり、干渉分析ツール(iMAT(商標))62が、テンプレート52と基板56の両方と光学的な通信状態にある。重合体流体供給システムと化学作用を有する放射線の供給源も存在しているが(図1との関連において説明したように、これらは、いずれも、通常、インプリントリソグラフィーシステムに包含されている)、わかりやすくするように、これは図示されてはいない。模範的なテンプレートステージは、屈曲システム(図示されてはいない)を通じてインプリントヘッド20に結合されたチャックシステム(図示されてはいない)及びアクチュエータサブアセンブリ(図示されてはいない)を含んでいるが、これらについては、いずれも、Anshuman Cherala、Byung−Jin Choi、Pawan Kumar Nimmakayala、Mario J. Meissl 及びSidlgata V. Sreenivasanを発明者とする代理人ドケット番号P154−30V147を具備した「SYSTEM FOR MAGNIFICATION AND SITORTION CORRECTION DURING NANO−SCALE MANUFACTURE」という名称の(本出願と共に)出願された同時係属中の米国特許出願番号(まだ付与されていない)明細書に記述されており、この内容は、本引用により、本明細書に包含される。
【0012】
iMAT(商標)62は、ステージ54、60の両方と結合することにより、フィードバックループ64を介してこれらと通信し、2つの座標系(1つはテンプレート52によって定義され、もう1つは、基板56によって定義されている)の間の適切な空間配列を容易にすることにより、これらの間の望ましい空間配列を実現している。このために、iMAT(商標)62は、テンプレート52と基板56の両方の複数の空間パラメータに関するデータを生成すると共に、これらに応答して信号を決定することにより、空間パラメータ間の差が望ましい公差内に収まるようにしている。このために、iMAT(商標)62は、テンプレートアライメントマーク65と呼ばれるテンプレート52上の1つ又は複数のアライメントマークと、基板アライメントマーク66と呼ばれる基板56上の1つ又は複数のアライメントマークを検知するようになっている。iMAT(商標)62は、アライメントマーク65、66を検知することによって得られた情報に基づいて、テンプレート52と基板56の複数の相対的な空間パラメータを決定可能である。これらの空間パラメータは、アラインメントマークの間のX、Y方向に沿ったこれらの間のミスアライメントを含み、さらに、相対的な倍率/ランアウト計測値と呼ばれるX、Y方向における基板56とテンプレート52との間の相対的なサイズの差と、スキュー計測値とよばれるテンプレート52及び/又は基板56上の2つの隣接する横方向に延びるエッジの相対的な非直交性とを含んでいる。又、iMAT(商標)62は、テンプレート52が位置しているプレーンとテンプレート52に対向している基板56の表面に対して実質的に垂直であるZ方向を中心とした相対的な回転の向きを決定することも可能である。
【0013】
図4を参照すれば、iMAT(商標)62は、参照符号70、80、90、100、110、120によって示されている複数の検出システムと、照明源94、124を含んでいる。検出システム70、80、90、100、110、120のそれぞれは、検出器72、82、92、102、112、122をそれぞれ含んでいる。検出システム70、80、100、110のそれぞれは、参照符号74、84、104、114によって示された照明源をそれぞれ含んでいる。照明源74、84、94、104、114、124のそれぞれは、検出器72、82、92、102、112、122がそれぞれ光学的な通信状態にある(即ち、視野内に位置している)テンプレート52の領域上の光などの入射エネルギーに結合されている。具体的には、検出器72は、合焦オプティクス78と半鍍銀(50/50)ミラー76を通じてモールド198上に配置されたアライメントマークを有するテンプレート52の領域200と光学的な通信状態にある。
【0014】
照明源74は、半鍍銀(50/50)ミラー76上に入射する光学エネルギーを生成し、この結果、このエネルギーは、経路p1に沿って導かれて領域200を照明している。領域200上に入射する光学エネルギーの一部は、経路p1に沿って戻り、半鍍銀ミラー76を通過して、合焦オプティクス78により、検出器72上に合焦される。同様に、検出器82は、経路p2に沿って戻る照明源84によって生成された光学エネルギーを検知するための半鍍銀(50/50)ミラー86と合焦オプティクス88により、領域202との光学的な通信状態に配置されている。検出器102は、経路P4に沿って戻る照明源104によって生成された光学エネルギーを検知するための半鍍銀(50/50)ミラー106と合焦オプティクス108により、領域206との光学的な通信状態に配置されている。検出器112は、経路P7に沿って戻る照明源114によって生成された光学エネルギーを検知するための半鍍銀(50/50)ミラー116と合焦オプティクス118により、領域212との光学的な通信状態に配置されている。このように、検出器システム70、80、100、110は、同軸型の照明と検出を利用している。検出器72、82、102、112として使用する模範的なシステムは、XEES50、XEHR58、及びXE75という型番において、Sony, Inc.社から入手可能である。
【0015】
モールド198のエリア全体が露光され、化学作用を有する放射線がこれを通じて伝播できるようにするように、検出器72、82、92、102、112、122や、照明源74、84、94、104、114、124、光学ユニットのその他のコンポーネントは、いずれも重畳した状態にはない。このために、経路P1〜P8のそれぞれは、モールド198の垂線に対して2°〜15°の範囲内の角度を形成している。このような構成により、検出器72、82、92、102、112、122のそれぞれは、実質的にその他の次数のすべてのその他の波長を拒絶しつつ、領域200、202、204、206、212、214からそれぞれ伝播する放射線の所望の波長を検知するように構成されている。例えば、検出器72、82、92、102、112、122のそれぞれは、1つの次数(例えば、実質的にその他の次数のすべてのその他の波長を拒絶しつつ、領域200、202、204、206、212、214からの光の1次、又は、更に高次の回折波長)を検知するように構成されている。
【0016】
但し、検出システム90、120は、同軸型の照明と検出を利用してはいない。即ち、検出システム90、120用の照明源は、検出器の反対側に配置されている。例えば、照明源94は、エネルギーを経路P6に沿って導いて領域204上に入射させている。領域204から戻るエネルギーの一部は、経路P3に沿って伝播し、光学トレイン98によって収集されており、この光学トレインは、このエネルギーを検出器92上に合焦している。同様に、照明源124は、エネルギーを経路P5に沿って導いて領域214上に入射させており、これから戻るエネルギーの一部は、経路P8に沿って伝播している。この経路P8に沿って伝播するエネルギーは、光学トレイン128によって収集され、この光学トレインが、これを検出器122上に合焦している。これらの非同軸型の照明ユニットを使用することにより、その他の同軸型の照明ユニットよりも高速で画像をキャプチャ可能である。反対方向から照明することにより、ビームは、50/50ミラーを通過したり又はこれによって反射されることがない。この結果、相対的に大きな照明エネルギーが検出器に到達可能である。相対的に高速の画像生成のためには、検出器に到達するビーム強度を極大化することが望ましい。尚、模範的な検出システムは、型番1M150、1M75において、カナダのWaterlooに所在するDarsa Corporation社から入手可能である。
【0017】
尚、6つの検出システム70、80、90、100、110、120が示されているが、対象とする空間パラメータに応じて、任意の数の検出システムが存在可能である。例えば、2つの検出システムを配置することによって領域200、202、204、206、208、210、212、214の中の共通領域から情報を検知できるように、6つを上回る数の検出システムを利用可能であり、この結果、8個、10個、12個の検出システムが存在することになろう(図示されていない)。又、検出システム70、80、90、100、110、120のそれぞれにより、領域200、202、204、206、208、210、212、214の中の複数のものから同時に情報を入手することも可能である。このように、検出器により、高度な冗長性を有するデータの組を収集可能である。
【0018】
検出器72、82、92、102、112、122のそれぞれは、検知された光学エネルギーに応答して信号を生成し、この信号は、その検出器とデータ通信状態にあるプロセッサ130によって受信される。プロセッサ130は、このプロセッサとデータ通信状態にあるメモリ132内に保存されているコンピュータ可読コードに基づいて動作しており、モールド26と、そのモールドとの重畳状態にあるパターニングの実行対象である基板56の領域69などの2つの座標系の間の相対的な空間パラメータを決定する。領域69のエリアは、通常、モールド198のエリアと同一の広がりを有している。
【0019】
図5を参照すれば、モールド26のそれぞれのコーナーには、参照符号220、230、240、250として示されているアライメントマークの組が配置されている。アライメントマークのそれぞれの組は、1つの方向に沿って離隔した複数の平行ラインから構成されるテンプレートアライメントマーク要素(Template Alignment Mark Element:TAME)を含んでおり、TAMEの中の1つと関連付けられている複数のラインが沿って離隔している方向は、残りのTAMEと関連付けられている複数のラインが沿って離隔している方向と直交している。例えば、組220は、TAME221と222を含んでいる。TAME221は、ピッチ224でX方向に沿って離隔した複数の平行ライン223を含んでいる。TAME222は、ピッチ226でY方向に沿って離隔した複数の平行ライン225を含んでいる。同様に、TAME231のライン233は、TAME241のライン243とTAME251のライン253と同様に、X方向に沿って離隔している。TAME232のライン235は、TAME242のライン245及びTAME252のライン255と同様に、Y方向に沿って離隔している。
【0020】
図4、図5の両方を参照すれば、それぞれのTAME221、222、231、232、241、242、251、252は、領域200、202、204、206、208、210、212、214の中の1つと一意に関連付けられている。具体的には、アライメントマークのペア220、230、240、250のペアの1つと関連付けられている隣接するアライメントマークの間の離隔は、隣接するTAMEと関連付けられている領域内には存在しないように設定されている。例えば、TAMEと領域のそれぞれの相対的な寸法は、TAME全体がその領域内に存在するように設定されている。この結果、TAME221は、領域200と関連付けられており、TAME222は、領域202と関連付けられており、TAME232、231は、それぞれ、領域204、206と関連付けられている。TAME241、242は、それぞれ、領域208、210と関連付けられており、TAME252、251は、それぞれ、領域212、214と関連付けられている。但し、TAME221が領域214、202の両方の外に位置し、且つ、TAME251、222の両方が、領域200の外に位置するように、隙間260、267が設定されている。この結果、検出器72によって検知される(領域202、214、並びに、遠い領域204、206、208、210、212などの)領域200の外部から戻ってくるエネルギーの量が極小化される。同一の理由から、TAME232が領域202、206の両方の外に位置し、且つ、TAME231、222が領域204の外に位置するように、隙間261、262が設定されている。TAME241が領域206、210の両方の外に位置し、且つ、TAME231、242の両方が領域208の外に位置するように隙間263、264が設定されている。TAME252が領域210、214の外に位置し、且つ、TAME242、251の両方が領域212の外に位置するように隙間265、266が設定されている。
【0021】
図5、図6の両方を参照すれば、TAME221、222、231、232、241、242、251、252のそれぞれは、平行ラインの単一の組を有しているが、それぞれは、平行ラインの任意の数の組(例えば、1−n個の組(この場合にnは、整数である))の組を有することができる。この結果、TAME221、222、231、232、241、242、251、252の中の1つ又は複数のものは、平行ラインの複数の組から構成可能である。この実施形態においては、TAME221、222、231、232、251、252は、それぞれ、それぞれの間の離隔が極小化されるように接触した関係にある参照符号270、271、272によって示された平行ラインの3つの組を含んでいる。平行ラインの隣接するペア間における離隔(又は、ピッチ)は、組270、272、274の長さにわたって実質的に一定であり、組270は、反対側に位置する終点273、274の間の長さにわたって延びており、組271は、反対側に位置する終点275、276の間の長さにわたって延び、組272は、反対側に位置する終点277、278の間の長さにわたって延びている。尚、組270、271、272は、互いに同一の広がりを有するように延びるように示されているが、これは必須ではない。
【0022】
図6、図7、図8を参照すれば、組270、271、272の中の1つと関連付けられた方向D1に沿って計測されるピッチは、残りの組270、272、272と関連付けられているピッチとは異なっている。この例においては、組270、272と関連付けられているピッチは整合しているが、組271と関連付けられているピッチは、組270、272と関連付けられているピッチとは異なっている。例えば、組270と組272は、それぞれ、方向D1に沿って計測される幅が約1ミクロンである幅280を有する41個の平行ラインを具備している。隣接しているラインは、方向D1に沿って計測される約1ミクロンの隙間282だけ離隔しており、この結果、2ミクロンのピッチを提供する40個の隙間を具備した組270、272が得られている。組271は、方向D1に沿って計測される幅が約1.025ミクロンである幅284を有する39個の平行ラインを具備している。隣接しているラインは、約1.025ミクロンの方向D1に沿って計測される隙間286だけ分離しており、この結果、2.05ミクロンのピッチとなっている40個の隙間を具備した組271が得られている。方向D2に沿って計測されるラインの長さは、約45ミクロンである。
【0023】
図3、図6、図9を参照すれば、モールド198と領域69の間の相対的な空間パラメータを決定するように、アライメントマーク66は、基板アライメントマーク要素(Substrate Alignment Mark Element:SAME)166と呼ばれる複数のアライメントマーク要素を含んでいる。SAME166の少なくとも1つは、TAME221、222、231、232、241、242、251、252の中の1つと重畳状態にあり、且つ、これと同一の広がりを有するように延びている。この実施形態においては、TAME221、222、231、232、241、242、251、252のそれぞれは、複数のSAME166の中の1つと重畳状態にある。具体的には、SAME166の中の1つと重畳状態にあるそれぞれのTAME221、222、231、232、241、242、251、252は、残りのSAME166と重畳状態にあるTAME221、222、231、232、241、242、251、252とは異なっている。
【0024】
図4、図6、図9、図10を参照すれば、模範的なSAME166は、TAME221、222、231、232、241、242、251、252との関係において前述したように、離隔した平行ラインの単一の組から構成可能である。但し、経路P1〜P4及びP7〜P8の1つに沿って伝播する1次回折波長をモールド198の垂線に対して傾斜した角度において収集することが望ましい。このために、チェッカーボードパターンとよばれる2つの直交方向において周期性を有するパターンが利用されている。更には、参照符号370、371、372によって示されているチェッカーボードパターンの3つの組を利用することが望ましい。チェッカーボードパターンの3つの組370、371、372は、それぞれの間の離隔が極小化されるように接触した関係にある。それぞれのチェッカーボードパターンは、複数のフィーチャ373を含んでおり、このそれぞれは、その形状が略矩形である。隣接するフィーチャのそれぞれのペアは、隙間374によって分離されている。組370、372内の方向D1に沿ったフィーチャ373の隣接するペアの間の離隔(又は、ピッチ)は、組271のピッチに実質的に同一である。組371内の方向D2に沿ったフィーチャ373の隣接するペア間の離隔(又は、ピッチ)は、組270、272のピッチと実質的に同一である。
【0025】
0次の鏡面反射波長に対する傾斜した角度を有する経路に沿って伝播する波長の検知を円滑に実行するように、選択される傾斜角度は、SAME166およびTAME221、222、231、232、241、242、251、252の形状と、検知対象である回折波長の次数に依存している。例えば、モールド198と領域69の間の距離とは実質的に無関係に情報を入手するには、1次回折波長は、例えば、モールド198の垂線に対して2°〜15°の範囲内の傾斜角度を有する。このためには、方向D2に沿って計測される隣接するフィーチャ373のペアのピッチは、約2.2ミクロンである。この構成により、基板アライメントマーク166との重畳状態にあるTAME221、222、231、232、241、242、251、252の中の1つの配置は、結果的に、組370と重畳関係にあると共に、これと同一の広がりを有するように延びる組270と、組371との重畳状態にあると共に、これと同一の広がりを有するように延びる組271と、組372との重畳状態にあると共に、これと同一の広がりを有するように延びている組272をもたらすことになる。TAMEとSAMEの通常の寸法は、方向D1に沿っては、最大400ミクロンであり、方向D2に沿っては、150〜250ミクロンであってよい(即ち、平行ラインのそれぞれは、その長さが150〜250ミクロンである)。これらは、例えば、D1に沿っては、100ミクロンであり、長さは、40ミクロンであるなど、その寸法が大幅に小さなものであってもよい。或いは、この代わりに、D1に沿った寸法が更に大きく(〜1mm)、且つ、D2に沿った寸法が更に小さいものであってもよい(〜40ミクロン)。
【0026】
図4、図6、図9、図11を参照すれば、SAME166との重畳状態に配置された際に、方向D1は、TAME221、231、241、251と、これらとの重畳状態にあるSAEM166の場合には、X方向に対して平行に延びている。TAME222、232、242、252と、これらと重畳状態にあるSAEMの場合には、方向D1は、Y方向に対して平行に延びている。この結果、それぞれのTAME221、222、231、232、241、242、251上に入射する光は、回折し、この結果、これらと光学的な通信状態にある検出器72、82、92、102、112、122の中の1つが1次回折波長を検知する。例えば、TAME221から回折された光は、検出器72によって検知され、TAME222から回折された光は、検出器82によって検知され、TAME232から回折された光は、検出器92によって検知され、TAME231によって回折された光は、検出器102によって検知され、TAME251によって回折された光は、検出器122によって検知され、TAME252によって回折された光は、検出器112によって検知される。通常、アライメントは、接触状態液体アライメント(in contact liquid align)と呼ばれるモールド198と領域69の間の容積を実質的に充填した重合体材料の存在下において発生する。このために、重合体材料は、TAME221、222、231、232、241、242、251の中の1つと、これとの重畳状態にあるSAME166の間に配置されていないことが望ましい。このために、「Moat System For An Imprint Lithography Template」という名称の2004年8月13日付けで出願された米国特許出願第10/917,761号に開示されているテンプレートをテンプレート52として利用することが望ましいであろう(この出願は、本発明の譲受人に譲渡されており、この内容は、本引用により、本明細書に包含される)。
【0027】
1次回折光を検知した際に、検出器72、82、92、102、112、122のそれぞれは、図11に示されている隣接する高強度領域473が低強度領域474によって距離dだけ離隔している空間的に変化する光強度470、471、472という3つの系列の画像469を入手する。系列470は、組270、370の重畳によって生成された回折光に対応している。同様に、系列471は、組271、371の重畳に対応しており、系列472は、組272、372の重畳に対応している。領域69とモールド198の間における望ましい空間的な配列は、テンプレートと基板の相対的な幾何学的情報に対応した特定のオフセットを生成するように配置された系列470、471、472の中の高強度領域473上に存在している(これは、望ましいものである場合もあり、単純にミスアライメントを通知している場合もある)。
【0028】
図4、図11、図12を参照すれば、画像469、475などの画像の検知に応答し、検出器72、82、92、102、112、122のそれぞれは、信号を生成し、この信号がプロセッサ130によって受信される。この結果、6つの信号がプロッサ130によって受信される。但し、以下の説明においては、残りの検出器72、82、92、102、112、112によって生成されるそれぞれの信号に関してもこのプロセスが発生するという理解の下に、わかりやすくするように、検出器72、82、92、102、112、122によって生成される信号の中の1つとの関連において、このプロセスについて説明する。信号は、検出器72、82、92、102、112、122によってキャプチャされた情報(即ち、視野内の情報)のすべてを含んでいる。検出器72、82、92、102、112、122のそれぞれの視野は、参照符号477に沿って計測した場合に、約758ミクロンであり、参照符号480に沿って計測した場合には、約500ミクロンである。メモリ132内に保存されているプログラムは、プロセッサ130によって実行されることにより、関心領域478を識別する(この関心領域は、視野の一部分であり、この内部においては、その関係している組470、471、472以外の実質的にすべての情報が除外されている)。このために、両方の方向に沿ってピクセルの偶数倍となるように、関心領域(Region Of Interest:ROI)が設定されている(参照符号479に沿っては、695ピクセルであり、参照符号480に沿っては、192ピクセルである)。この結果、ROI 478の寸法は、TAME221、222、231、232、241、242、251、252と、TAME166に関連付けられている寸法の関数である。
【0029】
系列470、471、472のサイズは、TAME221、222、231、241、242、251、252のサイズに対応しており、これは、TAME166のサイズに等しい。ROI 478の寸法は、SAME166とTAME221、222、231、232、241、242、251、252と関連付けられている幅と高さを検出器72、82、92、102、112、122のピクセルのサイズによって除算することによって設定される。更には、方向480に沿ったROI 478の寸法は、系列470、471、472の数(これは、この例においては、3である)の偶数倍となるように選択される。
【0030】
ピクセルのそれぞれは、0〜255の範囲内の関連付けられた値を具備可能である。ピクセル値は、メモリ132内のメモリ空間と呼ばれる場所にマッピングされる。この結果、それぞれの系列470、471、472ごとに、695列x64行に配列された0〜255からの値を具備したアレイとしてメモリ空間内にマッピングされることになる。従って、メモリ132は、検出器72、82、92、102、112、122によって検知された画像に対応するその内部にマッピングされた値の3つのアレイを具備している。
【0031】
メモリ空間内にマッピングされた3つのアレイのそれぞれごとに、695個の値の1次元のアレイを生成する。これは、695列のそれぞれごとに、64行と関連付けられている値の平均値を入手することにより、実現される。これは、それぞれ、系列470,471、472から得られる情報481、482、483の実質的に3つの正弦波表現に対応している。これらの正弦波のそれぞれを時変信号として取り扱い、ピクセル0〜694に対応するアドレス間においてウィドウ化された高速フーリエ変換(Fast Fourier Transform:FFT)又は離散フーリエ変換(Discrete Fourier Transfor:DFT)を利用することにより、周波数ドメインにマッピングする。その後、ROI内に存在している整数の周期と関連付けられたビン内の情報を分析する。前述のビン内の値のATAN2関数を決定することにより、それぞれの正弦波信号481、482、483と関連付けられている位相値φ1、φ2、φ3をそれぞれ見出す。ROI 478の原点(即ち、ROI 478が始まっているところ)との関係において、−π〜πの値を具備する位相値φ1、φ2、φ3を決定する。
【0032】
正弦波481、482、483の間の位相値の差は、次のように決定する。
【0033】
Δ1=φ1−φ2 (1)
Δ2=φ3−φ2 (2)
【0034】
解く必要があるのは、式1及び式2の中の1つのみであるが、2つの差動位相値を入手することにより、位相差計測値の分解能が倍増する。検出器72、82,92、102、112、122に起因したエラーが低減しない場合に、これを減衰させるように、式1及び式2において決定された差の平均を次のように決定する。
【0035】
(Δ1−Δ2)/2=Δ3 (3)
【0036】
次いで、正弦波418、482、483の間の絶対位相差Δ4を次のように得る。
【0037】
Δ3/2=Δ4 (4)
【0038】
式(4)から、テンプレート56とモールド198の間の対応する線形変位Dを位相Δ4から次のように決定可能である。
【0039】
D=P1P2Δ4/4π(P1−P2) (5)
【0040】
この場合に、P1は、方向D1に沿ったSAME371及びTAME270、272と関連付けられているピッチであり、P2は、TAME271及びSAME370、372と関連付けられているピッチである。このように、検出器72、82、92、102、112、122は、領域69とモールド198の間の6つの異なる変位計測値(即ち、領域200、202、204、206、212、214のそれぞれからの1つの計測値)に関する情報の取得を円滑に実行する。これらの6つの変位計測値から、モールド198と領域69に関する様々な相対的空間パラメータを「Analysis of Overlay Distorion Patterns」(SPIE、921巻、208〜222頁、1988年)にArmitage, Jr.他が記述しているように、決定可能である(この内容は、本引用により、本明細書に包含される)。模範的な空間パラメータは、2つの直交する方向(例えば、X、Y方向)に沿った線形ミスアライメント、これらに直交する方向に延びる第3方向(例えば、Z方向)に沿った回転ミスアライメント、倍率差と呼ばれるエリアの差、モールド198と領域69の周囲の間における直交性の差である。これらの空間パラメータは、通常、テンプレートを製造する際に使用されるテンプレートと、従って、モールド198上におけるフィーチャの配置を定義する情報であるテンプレート設計内に存在する詳細なテンプレート配置データを基準として、モールド198上のフィーチャとの関連におけるTAME221、223、231、233、241、243、251、253の理想的な場所の間の関係の関数として突き止められる。このために、プロセッサ130によって実行されるように、テンプレート配置データに関係する情報がメモリ132内に保存されている。次の式により、最小二乗法を使用し、テンプレート配置データから相対的な空間パラメータを入手可能である。
【0041】
Xs=X0+SxXwcos(θ)+SyYwsin(θ)+Ywsin(φ) (6)
Ys=Y0−SxXwsin(θ)+SyYwcos(θ)+Xwsin(φ) (7)
【0042】
ここで、Xsは、式5から決定され、且つ、Xwが加算されたX方向に沿って計測された変位Dである。既知の量Xwは、モールド198のフィーチャとの関連における対象のTAMEのX方向に沿った理想的な場所である。同様に、既知の量Ywは、モールド198のフィーチャとの関連における対象のTAMEのY方向に沿った理想的な場所である。従って、Ysは式5から決定され、Ywが加算されたY方向に沿って計測された変位Dである。変数X0は、X方向に沿ったモールド198と領域69の間のオフセットである。同様に、変数Y0は、Y方向に沿ったモールド198と領域69の間のオフセットである。変数Sx、Syは、それぞれ、X、Y方向に沿ったモールド198と領域69の間の差である。変数θは、Z軸を中心としたモールド198と領域69の間の回転位置の差である。変数φは、モールド198の周囲と領域69の周囲の間おける直交性の差である。この結果、実質的にモールド198と領域69の間の距離とは無関係に(即ち、X−Y変位パラメータのみから)倍率/ランアウトパラメータと直交性パラメータを決定可能である。
【0043】
具体的には、モールド198と領域69の間の相対的な空間パラメータを決定した際に、プロセッサ130は、モールド198と領域69の間の望ましい重ね合わせが実現するように、制御信号を生成してステージ54、60の動作を調節する。重ね合わせは、検出器72、82、92、102、112、122が、領域200、202、204、206、212、214のそれぞれにおいて、望ましいオフセットを具備するものとしては、図11に、さらに、オフセットを具備していないものとしては、図12に示されている画像469又は475を検知することによって示される。通常のアライメントプロセスにおいては、前述の計測値は、モールド198と領域69の間の距離が変化するのに伴って(即ち、Z軸に沿って近接するのに伴って)取得される。例えば、モールド198と領域69が、4ミクロン、1ミクロン、又は(重合体材料によって実質的に充填される容積がこれらの間において定義される)最終的な距離だけ離隔している際に、計測及び制御信号を生成可能である。この結果、空間パラメータを決定可能であり、望ましくないモールド198と領域の間の相対的な空間パラメータを極小化するように、インプリンティングプロセスにおいてリアルタイムで制御信号を生成可能である。
【0044】
硬化又は架橋によるインプリンティング材料の硬化の際に、硬化に必要な光子により、モールド198と領域69に加熱が発生する。硬化用の光の強度が妥当な程度に均一に維持されておれば、モールド198と領域69は、均一に加熱される。不均等な加熱及び/又は不均等なCTEの場合には、インプリンティング材料が基板に接着する固体のように振舞うように固まっていないポイントまで露光された際に、アライメントのミスマッチが発生する可能性がある。但し、平均ミスアライメントは、シミュレーションによって、或いは、前述のアライメント計測システムを使用することによって推定可能であり、硬化の直前に、iMAT62を使用することにより、望ましいスケーリング(倍率)のミスマッチが実現されるように、モールド198又は領域69のサイズを事前に補正可能である。尚、アライメントの測定に使用される波長は、硬化用の光とは実質的に異なっている必要があり、これが望ましい。
【0045】
前述の正弦波481、482、483の位相を決定するためのフーリエ分析の実装に基づいて、これらの計測値の精度がROI 478の適切な決定に部分的に依存していることが明らかである。これは、系列470、471、472に関するすべての情報が得られるようにするためである。このためには、ROI 478が基準座標系の対応する基準点のピクセル距離内に収まるように設定することが望ましい。この例においては、基準座標系は、モールド198であるが、基準座標系は、領域69であってもよいことを理解されたい。この結果、この例においては、ROI 478は、モールド198上の対応する基準点のピクセル距離内に収まるように設定されている。この結果、系列470、471、472との関連におけるROI 478の適切な重ね合わせが保証される。
【0046】
但し、ROI 478の望ましい重ね合わせは、問題である。これは、モールド198の垂線に対する傾きを形成している経路に沿って伝播する領域200、202、204、206、212、214からの1次回折波長を収集するように構成された検出器72、82、92、102、112、122のそれぞれと関連付けられた収集オプティクスに起因している。この結果、それぞれ、照明源74、84、94、104、114、124から領域200、202、204、206、212、214上に入射する光は、結果的に、重畳状態にあるSAME166が存在していない状態においては、それぞれ、TAME221、222、231、232、241、242、251、252に対応する非常にわずかな情報しかもたらさない。更には、TAME221、222、231、232、241、242、251、252と領域200、202、204、206、212、204の適切な重ね合わせが存在していない状態におけるTAME221、222、231、232、241、242、251、252の中の1つとの重畳状態にあるSAME166の適切な位置決めも問題である。この問題を克服するための1つの方式は、2段階重ね合わせプロセスを実装してROI 478の正確な配置を得る方法である。第1段階においては、数ピクセルサイズの分解能において、コースアライメントを実現する。具体的には、このコースアライメント方式においては、領域69のウエハに対するモールド198の配置を1周期481、482、483以内において実現する必要がある。低CTE(例えば、インバー又はゼロデュアー材料)を具備した構造的な支持によってiMAT62にリンクされている高開口数を具備する軸外し型の画像生成システムが望ましい。又、iMAT62と軸外し型カメラ(図示されてはいない)間の相対的な場所に対する振動の影響が極小化されるように、適切に強力な台が望ましい。本実施形態においては、組270、271、272のピッチに対して直交するように計測されたピッチを具備する格子を定義する離隔した平行ラインの複数のグループ500〜507をモールド198上に包含することにより、このコースアライメントを実現している。
【0047】
グループ500、507は、矢印の形状に構成されており、グループ500のポイントは、系列270のコーナーに近接しており、グループ507のポイントは、系列272のコーナーに近接しており、グループ500の反対側に配置されている。グループ501〜506は、D1方向に沿って均等に離隔しており、このそれぞれは、三角形の形状に構成されている。グループ501、503、505のそれぞれの頂点は、系列270に近接して配置されており、これに対向している。グループ502、504、506のそれぞれの頂点は、系列272に近接して配置されており、これに対向している。グループ500〜507と関連付けられている離隔した平行ラインには、検出器72、82、92、102、112、122による検知を円滑に実行するのに不可欠なピッチと寸法が提供されている。グループ500〜507のピッチは、1次(又は、必要に応じて、更に高次の)回折波長を検出器によって収集及び検知できるように、チェッカーボードのピッチと同一であってよい。
【0048】
図5、図10、図14、図15を参照すれば、このグループ500〜507の構成により、前述の位相演算を実現するのに十分な状態にROI 478を位置づけ可能である。その後、視野を検出器72、82、92、102、112、122と適切に重ね合わせるように、前述の絶対位相差Δ4を入手することによって微細なアライメントを実行する。このために、オーバーサイズのチェックボードパターン(OCP)600をモールド198と重畳状態となるように配置する。このOCPは、そのそれぞれが隙間374によって分離されたフィーチャ373を具備する組370、371、372を含む。組370、371、372のいずれか1つの寸法は、実質的にモールド198のエリアよりも、エリアが大きくなるように設定可能である。この結果、TAME221、222、231、232、241、242、251、252の中の1つ又は複数のものとの重畳状態にOCP600の組370、371、372の中の1つを配置するためのアライメント公差を緩和可能である。このために、OCP600の組370、371、372のいずれか1つは、同時にTAME221、222、231、232、241、242、251、252のそれぞれ又はそのサブセットとの重畳状態となるように、十分に大きなものであってよい。この構成により、OCP600は、1つ又は複数のTAME221、222、231、232、241、242、251、252との重畳状態において、且つ、それらとの間のその正しい向きにおいて配置され、望ましい1次回折波長を生成して適切な重ね合わせを実現するように、X、Y軸に沿って移動すると共に、Z軸を中心として回転可能である。或いは、この代わりに、OCP600は、組370、371、372の中の1つのみを含む。この結果、OCP600は、基板56と同一の広がりを有すると共に、基板56が支持されるステージ60の領域601内に配置可能である。この結果、OCP600は、単にZ軸を中心として回転することにより、検出器によって検知される1次回折を円滑に実行して適切な重ね合わせを計測する。或いは、この代わりに、OCP600は、領域601外において、ステージ60の領域602上に配置することも可能である。この構成により、OCP600は、X、Y軸に沿って移動すると共に、Z軸を中心として回転することにより、1つ又は複数のTAME221、222、231、232、241、242、251、252との重畳状態において、且つ、それらとの間の適切な向きにおいて配置され、望ましい1次回折波長を生成して適切な重ね合わせを実現可能である。
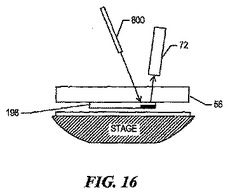
【0049】
図4、図5、図16を参照すれば、代替実施形態においては、複数のグループ500〜507を省略した状態において、ROI 478の適切な重ね合わせを実現可能である。具体的には、この例は、1次回折波長ではなく、検出器72、82、92、102、112、122による鏡面反射光の検知を利用している。尚、この方法は、検出器72との関連において説明することとするが、複数の検出器72、82、92、102、112、122の中の残りの検出器にも等しく適用される。検出器72、82、92、102、112、122の中の1つが光束の大きな変化を検出するまで照明源800を移動させる。このためには、領域601は、照明源800によって生成された照明に対する反射性を有することが望ましい。望ましいエネルギー束を検知した際に、検出器72と照明源800の相対的な位置をロックし、これにより、この両方がモールド198のエリア上を同期して移動し、TAME221、223、231、233、241、243、251、253の中の1つ(この場合には、TAME221)を照明及び検知するようにする。その後、検出器72の位置をTAME221に対して固定し、残りの検出器の中の1つ(例えば、検出器82、92、102、112、122)が光束の大きな変化を検知する位置に供給源880を移動させる。そして、このプロセスを反復する。検出器72、82、92、102、112、122のそれぞれの位置がTAME221、223、231、232、241、242、251、252との関連において固定された後に、前述の微細アライメント技法を実行してROI 478を適切に重ね合わせする。
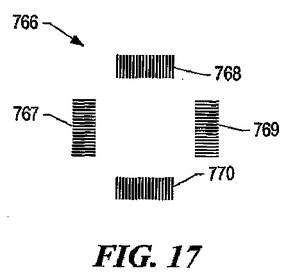
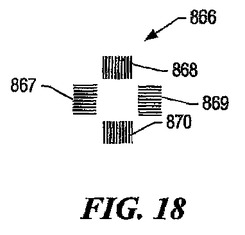
【0050】
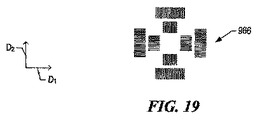
図5、図6、図17、図18を参照すれば、SAME166及びTAME221、223、231、233、241、243、251、253は、任意の数のアライメントマークの設計から構成可能である。例えば、SAME766は、離隔した格子要素の2つのペア767、768、769、770を含む。図示のように、格子要素767、769は、エリア内において同一の広がりを有しており、方向D2に沿って互いに重畳状態にあり、且つ、方向D1に沿って互いに離隔している。格子要素767、769のそれぞれは、方向D2に沿って離隔した平行ラインの系列を含んでいる。格子要素768、770は、エリア内において同一の広がりを有しており、方向D1に沿って互いに重畳状態にあり、且つ、方向D2に沿って互いに離隔している。格子768、770のそれぞれは、方向D1に沿って離隔した平行ラインの系列を含んでいる。一方、TAME221、223、231、233、241、243、251、253の1つ又は複数のものは、離隔した格子要素867、868、869、870の2つのペア866を含むことにもなろう。図示のように、格子要素867、869は、エリア内において同一の広がりを有しており、方向D2に沿って互いに重畳状態にあり、且つ、方向D1に沿って、格子767、769が離隔している距離よりも小さい距離だけ互いに離隔している。格子要素867、869のそれぞれは、方向D2に沿って互いに離隔した平行ラインの系列を含んでいる。格子要素868、870は、エリア内において同一の広がりを有しており、方向D1に沿って互いに重畳状態にあり、且つ、方向D2に沿って、格子768、770が離隔している距離よりも小さい距離だけ互いに離隔している。格子868、870のそれぞれは、方向D1に沿って離隔した平行ラインの系列を含んでいる。この構成により、2つのペア866は、図19の参照符号966によって示されているように、基板領域69とモールド198の適切な重ね合わせの際に、SAME766内に位置するように配置される。
【0051】
図17、図18、図20を参照すれば、格子766、767、768、769、868、867、869、870のそれぞれは、前述したように、且つ、格子967、968、969、970や、1067、1068、1069、1070として示されているように、チェッカーボードパターンを含む。最後に、図21に示されているように、格子1067、1068、1069、1070によってボックス1266を形成可能であると同時に、格子967、968、969、970を隣接するように形成することにより、ボックス1166とすることも可能である。
【0052】
本明細書に提示されているアライメント方式は、計測信号の品質を大幅に損なうことなしにはそのパラメータが正確に判明しない光学要素が存在している状況において使用可能である。例えば、テンプレートは、公称厚さが1〜10mmであってよく、その厚さの公差は0.1mm以上であってよい。更には、インプリントシステムは、それを通じたアライメントの実行を要する追加ウィンドウを備え、この光学特性は変化可能である。例えば、1mmの厚さの透明なウィンドウを空気圧に晒し、アライメントプロセスにおいて値を変化させることにより、これに応力を加えることが可能である。
【0053】
前述の本発明の実施形態は例示的なものである。本発明の範囲を逸脱することなしに、先程引用された開示内容に対して多くの変更や変形を実施可能である。例えば、傾斜した照明源が、等しいが反対の角度において傾斜している検出器に対してマークから反射される場合には、0次信号を使用することにより、前述のアライメントマーク構成のそれぞれの画像を生成可能である。或いは、この代わりに、これらのマークのパターニングされた領域を平行ラインから生成して傾斜した検出システムからのこれらの1次(又は、更に高次の)回折信号を画像生成する能力を向上させるように、これらのマークを生成することも可能である。SAMEの領域は、TAMEが対応している場合には、中空のボックスであるか、又は非中空のボックスを有するクロスであるか、又はクロスの形状であってよく(又は、この逆)、且つ、TAMEがユニバーサルなアライメントターゲットである場合には、これに対応するターゲットであってよい。SAMEのターゲットは、0次画像生成を実行する場合には、非中空のフィーチャを具備している。傾斜した照明により、傾斜した収集オプティクスを使用して0次画像生成を実現可能である。高次の画像生成を実行する場合には、傾斜した収集オプティクスの向きの関数として適切な向きを有する平行ラインの複合物としてターゲットを生成可能である。従って、本発明の範囲は、以上の説明によって限定されるものではなく、添付の請求項及びその等価物の完全な範囲を参照して決定することを要するものである。
【図面の簡単な説明】
【0054】
【図1】従来技術によるインプリントリソグラフィーシステムの概略平面図である。
【図2】従来技術による、重畳状態にあるモールドを有する、上部に配置された複数のレイヤを具備したパターニング済みの基板の断面図である。
【図3】本発明によるインプリントリソグラフィーシステムを示すブロックダイアグラムである。
【図4】上から見下ろした観点から示されている、テンプレートを有する、本発明による図3に示されている干渉分析ツールのコンポーネントを示す部分透視図及び部分ブロックダイアグラムである。
【図5】本発明による図4に示されているテンプレートの平面図である。
【図6】図5に示されているアライメントマーク要素内に包含可能なフィーチャの複数の系列を示す平面図である。
【図7】図6に示されているフィーチャの系列の中の1つ又は複数のものと関連付け可能な第1ピッチを具備するアライメントマークフィーチャの詳細図である。
【図8】図6に示されているフィーチャの系列の中の1つ又は複数のものと関連付け可能な第2ピッチを具備するアライメントマークフィーチャの詳細図である。
【図9】図3に示されている基板アライメントマーク要素内に包含可能なフィーチャを示す平面図である。
【図10】図9に示されているフィーチャの系列の中の1つ又は複数のものと関連付けられたアライメントマークフィーチャの詳細図である。
【図11】図6、図9に示されているアライメントマークフィーチャが重畳状態にあり、且つ、非ゼロのオフセットを有している際に、図4に示されている検出器の1つ又は複数のものによって検知される画像を示す平面図である。
【図12】図6、図9に示されているアライメントマークフィーチャが重畳状態にあり、且つ、ゼロのオフセットを有している際に、図4に示されている検出器の中の1つ又は複数のものによって検知される画像を示す平面図である。
【図13】図11の画像に応答し、図4に示されている検出器の中の1つのものによって生成される強度信号を示すグラフィカルな図である。
【図14】本発明による代替実施形態による図9のフィーチャを示す平面図である。
【図15】本発明の一実施形態による図3に示されているステージの概略透視図である。
【図16】本発明の代替実施形態によるテンプレートアライメントマークとの関連における検出器のコースアライメント調節の一方法を示す概略平面図である。
【図17】代替実施形態による図3に示されている基板アライメントマーク要素内に包含可能なフィーチャを示す平面図である。
【図18】代替実施形態による図5に示されているアライメントマーク要素内に包含可能なフィーチャの複数の系列を示す平面図である。
【図19】重畳状態にある際に図17、図18に示されているアライメントマーク要素の結果として得られるアライメントマークの構成を示す平面図である。
【図20】第1代替実施形態による図19に示されているアライメントマークの構成を示す平面図である。
【図21】第2代替実施形態による図19に示されているアライメントマークの構成を示す平面図である。
【特許請求の範囲】
【請求項1】
2つの座標系の間の相対的な空間パラメータを決定するシステムにおいて、
複数のポイントにおいて前記2つの座標系の間の相対的なアライメントを検知し、それらの間の相対的な空間パラメータを決定する分析システムであって、前記相対的な空間パラメータは、相対的なエリアと相対的な形状を含む、分析システムを有するシステム。
【請求項2】
前記分析システムは、複数の検出システムを更に含んでおり、このそれぞれは、前記2つの座標系の中の1つの垂線に対して傾斜した角度において回折された光学エネルギーを検知するように構成されている請求項1記載のシステム。
【請求項3】
前記分析システムは、複数の検出システムを更に含んでおり、このそれぞれは、前記相対的なアライメントに対応する情報を含む光学的エネルギーを検知し、且つ、これに応答して情報信号を生成するように構成されており、前記分析システムは、前記信号を受信し、これに応答して制御信号を生成するように結合されたプロセッサを含む請求項1記載のシステム。
【請求項4】
材料硬化の際の熱スケーリング効果に対する先験的な補償を含む請求項3記載の制御信号。
【請求項5】
前記相対的な空間パラメータは、アライメントと向きを更に含む請求項1記載のシステム。
【請求項6】
前記第1座標系は、第1プレーン内に位置する第1基板に対応しており、前記第2座標系は、前記第1プレーンとは離隔した第2プレーン内に位置する第2基板に対応している請求項1記載のシステム。
【請求項7】
前記第1及び及び第2プレーン間の前記離隔は、1ミクロン未満である請求項6記載のシステム。
【請求項8】
前記第1及び前記第2プレーン間の前記離隔は、インプリント流体によって部分的又は完全に充填される請求項6記載のシステム。
【請求項9】
前記第1座標系は、第1基板上に配置された格子の第1の組によって形成されており、前記第2座標系は、前記格子の第1の組との重畳状態にある第2基板上に配置された格子の第2の組によって形成されている請求項1記載のシステム。
【請求項10】
前記第1座標系は、第1基板上に配置された第1方向に沿って周期性を有する格子の第1の組によって形成されており、前記第2座標系は、前記格子の第1の組との重畳状態にある第2基板上に配置された2つの直交方向において周期性を有する格子の第2の組によって形成れている請求項1記載のシステム。
【請求項11】
前記第1座標系は、第1基板上に配置された格子の第1の組によって形成されており、前記検出システムのサブセットは、照明源と検出器を含んでおり、前記照明源は、エネルギーを経路に沿って導いて前記基板の領域上に入射させ、前記検出器は、前記領域から戻って前記経路に沿って伝播するエネルギーを検知する請求項1記載のシステム。
【請求項12】
前記第1座標は、第1基板上に配置された格子の第1の組によって決められており、前記検出システムのサブセットは、照明源と検出器を含み、前記照明源は、エネルギーを経路に沿って導いて前記格子の第1の組の上に入射させることにより、1次回折エネルギーを生成し、前記検出器は、前記経路に沿って伝播する前記1次回折エネルギーを検知するように構成されている請求項1記載のシステム。
【請求項13】
2つの座標系の間の相対的な空間パラメータを決定する方法において、
第1方向に対して直交する第2方向に沿って前記2つの座標系の間の相対的なアライメントを突き止めつつ、前記第1方向に沿って前記2つの座標系の間の距離を変化させ、複数のポイントにおいて、前記第1方向に沿った異なる距離において、それらの間の相対的な空間パラメータを決定する段階を有する方法。
【請求項14】
前記2つの座標系の間の相対的なアライメントを突き止める段階は、前記第1及び第2方向の両方に対して直交する第3の方向に沿っている請求項13記載の方法。
【請求項15】
前記空間パラメータを突き止める段階は、アライメント、倍率、スキューパラメータを突き止める段階を含む請求項13記載の方法。
【請求項16】
前記2つの座標系の間の相対的なアライメントを突き止める段階は、前記2つの座標系の中の1つの垂線に対して傾斜した角度において回折された光学エネルギーを検知する段階を更に含む請求項13記載の方法。
【請求項17】
前記2つの座標系の間の相対的なアライメントを突き止める段階は、前記2つの座標系の中の1つの垂線に対して傾斜した角度において回折され、且つ、前記複数のポイントから伝播する光学的エネルギーを検知する段階を更に含む請求項13記載の方法。
【請求項18】
前記2つの座標系の間の相対的なアライメントを突き止める段階は、前記距離が、基本的に4ミクロンと1ミクロンから構成された大きさの組からのものと関連付けられた大きさを具備している際に実行される請求項13記載の方法。
【請求項19】
前記2つの座標系の中の前記1つはモールドであり、残りの座標系はウエハであり、前記2つの座標系の間の相対的なアライメントを突き止める段階は、最終的な距離において相対的なアライメントを突き止める段階を更に含んでおり、前記モールドと前記テンプレートの間において容積が形成されており、前記容積は、重合体材料によって充填される請求項13記載の方法。
【請求項1】
2つの座標系の間の相対的な空間パラメータを決定するシステムにおいて、
複数のポイントにおいて前記2つの座標系の間の相対的なアライメントを検知し、それらの間の相対的な空間パラメータを決定する分析システムであって、前記相対的な空間パラメータは、相対的なエリアと相対的な形状を含む、分析システムを有するシステム。
【請求項2】
前記分析システムは、複数の検出システムを更に含んでおり、このそれぞれは、前記2つの座標系の中の1つの垂線に対して傾斜した角度において回折された光学エネルギーを検知するように構成されている請求項1記載のシステム。
【請求項3】
前記分析システムは、複数の検出システムを更に含んでおり、このそれぞれは、前記相対的なアライメントに対応する情報を含む光学的エネルギーを検知し、且つ、これに応答して情報信号を生成するように構成されており、前記分析システムは、前記信号を受信し、これに応答して制御信号を生成するように結合されたプロセッサを含む請求項1記載のシステム。
【請求項4】
材料硬化の際の熱スケーリング効果に対する先験的な補償を含む請求項3記載の制御信号。
【請求項5】
前記相対的な空間パラメータは、アライメントと向きを更に含む請求項1記載のシステム。
【請求項6】
前記第1座標系は、第1プレーン内に位置する第1基板に対応しており、前記第2座標系は、前記第1プレーンとは離隔した第2プレーン内に位置する第2基板に対応している請求項1記載のシステム。
【請求項7】
前記第1及び及び第2プレーン間の前記離隔は、1ミクロン未満である請求項6記載のシステム。
【請求項8】
前記第1及び前記第2プレーン間の前記離隔は、インプリント流体によって部分的又は完全に充填される請求項6記載のシステム。
【請求項9】
前記第1座標系は、第1基板上に配置された格子の第1の組によって形成されており、前記第2座標系は、前記格子の第1の組との重畳状態にある第2基板上に配置された格子の第2の組によって形成されている請求項1記載のシステム。
【請求項10】
前記第1座標系は、第1基板上に配置された第1方向に沿って周期性を有する格子の第1の組によって形成されており、前記第2座標系は、前記格子の第1の組との重畳状態にある第2基板上に配置された2つの直交方向において周期性を有する格子の第2の組によって形成れている請求項1記載のシステム。
【請求項11】
前記第1座標系は、第1基板上に配置された格子の第1の組によって形成されており、前記検出システムのサブセットは、照明源と検出器を含んでおり、前記照明源は、エネルギーを経路に沿って導いて前記基板の領域上に入射させ、前記検出器は、前記領域から戻って前記経路に沿って伝播するエネルギーを検知する請求項1記載のシステム。
【請求項12】
前記第1座標は、第1基板上に配置された格子の第1の組によって決められており、前記検出システムのサブセットは、照明源と検出器を含み、前記照明源は、エネルギーを経路に沿って導いて前記格子の第1の組の上に入射させることにより、1次回折エネルギーを生成し、前記検出器は、前記経路に沿って伝播する前記1次回折エネルギーを検知するように構成されている請求項1記載のシステム。
【請求項13】
2つの座標系の間の相対的な空間パラメータを決定する方法において、
第1方向に対して直交する第2方向に沿って前記2つの座標系の間の相対的なアライメントを突き止めつつ、前記第1方向に沿って前記2つの座標系の間の距離を変化させ、複数のポイントにおいて、前記第1方向に沿った異なる距離において、それらの間の相対的な空間パラメータを決定する段階を有する方法。
【請求項14】
前記2つの座標系の間の相対的なアライメントを突き止める段階は、前記第1及び第2方向の両方に対して直交する第3の方向に沿っている請求項13記載の方法。
【請求項15】
前記空間パラメータを突き止める段階は、アライメント、倍率、スキューパラメータを突き止める段階を含む請求項13記載の方法。
【請求項16】
前記2つの座標系の間の相対的なアライメントを突き止める段階は、前記2つの座標系の中の1つの垂線に対して傾斜した角度において回折された光学エネルギーを検知する段階を更に含む請求項13記載の方法。
【請求項17】
前記2つの座標系の間の相対的なアライメントを突き止める段階は、前記2つの座標系の中の1つの垂線に対して傾斜した角度において回折され、且つ、前記複数のポイントから伝播する光学的エネルギーを検知する段階を更に含む請求項13記載の方法。
【請求項18】
前記2つの座標系の間の相対的なアライメントを突き止める段階は、前記距離が、基本的に4ミクロンと1ミクロンから構成された大きさの組からのものと関連付けられた大きさを具備している際に実行される請求項13記載の方法。
【請求項19】
前記2つの座標系の中の前記1つはモールドであり、残りの座標系はウエハであり、前記2つの座標系の間の相対的なアライメントを突き止める段階は、最終的な距離において相対的なアライメントを突き止める段階を更に含んでおり、前記モールドと前記テンプレートの間において容積が形成されており、前記容積は、重合体材料によって充填される請求項13記載の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公表番号】特表2008−522412(P2008−522412A)
【公表日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願番号】特願2007−543499(P2007−543499)
【出願日】平成17年11月21日(2005.11.21)
【国際出願番号】PCT/US2005/042638
【国際公開番号】WO2007/046820
【国際公開日】平成19年4月26日(2007.4.26)
【出願人】(503193362)モレキュラー・インプリンツ・インコーポレーテッド (94)
【Fターム(参考)】
【公表日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願日】平成17年11月21日(2005.11.21)
【国際出願番号】PCT/US2005/042638
【国際公開番号】WO2007/046820
【国際公開日】平成19年4月26日(2007.4.26)
【出願人】(503193362)モレキュラー・インプリンツ・インコーポレーテッド (94)
【Fターム(参考)】
[ Back to top ]