
ナビゲーションにおける時間予測方法
【課題】自由走行の際は、利用者の意図する目的地及び、経路上の主要ランドマークまたは交差点等への交通情報を加味した所要時間や、一定時間内に到達可能な地点を提供することが困難である。
【解決手段】本発明のナビゲーション装置は、過去の走行履歴に基づき現在位置から前方に存在する代表的な地点への通過確率を求める到達地点確率計算処理部と、現在位置から今後走行するルートを推定したルートに基づき前記代表的な地点から主要表示地点を選択する主要表示地点選択処理部と、各主要表示地点について、交通情報を加味した所要時間を求める地点到達時間演算部と、現在位置から所定の時間内に到達可能な地点を主要表示地点の中から選択する表示地点選択処理部とを備える。
【解決手段】本発明のナビゲーション装置は、過去の走行履歴に基づき現在位置から前方に存在する代表的な地点への通過確率を求める到達地点確率計算処理部と、現在位置から今後走行するルートを推定したルートに基づき前記代表的な地点から主要表示地点を選択する主要表示地点選択処理部と、各主要表示地点について、交通情報を加味した所要時間を求める地点到達時間演算部と、現在位置から所定の時間内に到達可能な地点を主要表示地点の中から選択する表示地点選択処理部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自由走行時の地点到達時間予測方法に関する。
【背景技術】
【0002】
現行ナビでは目的地を設定し経路誘導を実施している。しかし、生活圏内走行時やよく行く地点へ行くときなどにおいては、経路誘導機能を使わないことも多々ある。自由走行をしている場合としては、利用者が現在住んでいるもしくは過去に住んでいた等のよく知っている土地を走行する場合や、何度も行っていたため覚えている等の理由が多い。つまり、自由走行をしているときの利用者が意図している目的地や走行経路は、過去に行ったことのある場所、通ったことのある経路である場合が多いという特徴がある。
【0003】
自由走行時においても交通情報は利用者にとって有益な情報であることから、過去に右左折した交差点の情報を使い、現在走行している道路の前方に過去に右左折した交差点が現れたときには、から判断し2つ先の交通情報を表示することで、見やすく適切な情報を提示するという技術が、特開2007−71814号公報に開示されている。
【0004】
また、現在地からの到達可能範囲を一定時間毎に区切って地図上に表示することにより、という技術が、WO07/032318に開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−71814号公報
【特許文献2】WO07/032318
【発明の概要】
【発明が解決しようとする課題】
【0006】
利用者が自由走行を行っているときにおいては、前記のような理由から利用者は既知の経路を走行している場合が多い。自由走行時には経路案内は不要であるが、時間帯や天候などに応じて交通状況は変化するため、利用者の意図した目的地及び、経路上の主要ランドマークまたは交差点等への交通情報を加味した所要時間や、一定時間内に到達可能な地点は、利用者にとって重要な情報となる。
【0007】
しかし、特許文献1に開示されているナビゲーション用交通情報案内装置では、進むと推測される経路上で、かつ現在地付近に絞って交通情報を表示することしかできないため、利用者の意図した目的地及び、経路上の主要ランドマークまたは交差点等への交通情報を加味した所要時間や、一定時間内に到達可能な地点を知ることはできない。
【0008】
また、特許文献2に開示されている地図表示装置では、現在地から全方向において到達可能な範囲を地図上に表示するため、利用者の意図した目的地及び、経路上の主要ランドマークまたは交差点等への交通情報を加味した所要時間や、一定時間内に到達可能な地点を容易に把握することが困難であった。
【課題を解決するための手段】
【0009】
本発明のナビゲーション装置は、過去の走行履歴に基づき現在位置から前方に存在する代表的な地点への通過確率を求める到達地点確率計算処理部と、現在位置から今後走行するルートを推定したルートに基づき前記代表的な地点から主要表示地点を選択する主要表示地点選択処理部と、各主要表示地点について、交通情報を加味した所要時間を求める地点到達時間演算部と、現在位置から所定の時間内に到達可能な地点を主要表示地点の中から選択する表示地点選択処理部とを備える。
【発明の効果】
【0010】
本発明により、経路探索を行わないまま意図している目的地方面に走行した場合、一定時間内に到達可能な地点と、そこに到達するまでに要する時間を容易に把握することが可能となる。そして、到達可能な地点までの所要時間がわかるようになることで、それぞれの地点付近までの到達可能時間も利用者は容易に想定することができるようになる。
【0011】
これにより、自由走行時において利用者の意図している目的地までの経路は既知であるため、過去に行ったことのある地点を表示することで、意図している目的地への到達時間を類推することができるようになり、利用者は早い段階で意図している目的地へ向かうか否かの判断をすることができる。
【図面の簡単な説明】
【0012】
【図1】システム構成図。
【図2】システム全体の処理フロー図。
【図3】到達地点選択処理フロー図。
【図4】到達予測時間計算処理フロー図。
【図5】推定走行ルートを選択する図。
【図6】走行中、動的に推定走行ルートを変更する動作を説明する図。
【図7】表示画面の例を示す図。
【図8】画面表示の動作を説明する図。
【図9】センタ方式を示す図。
【図10】センタ方式における処理フロー図。
【発明を実施するための形態】
【0013】
以下、図面を参照しながら本発明の具体的実施形態について説明する。
【実施例】
【0014】
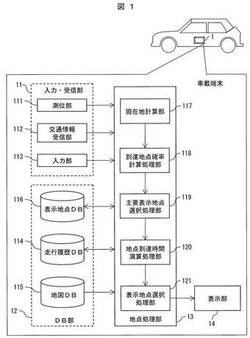
図1に本発明の全体のシステム構成を示す。
【0015】
本発明のナビゲーションシステムは、大きく入力・受信部11,各種データを保存するDB部12,表示地点への到達時刻を計算する地点処理部13及び、各地点の到達時間を表示する表示部14より構成される。入力・受信部11はGPSやセンサ等で計測したデータに基づき自車位置を測定する測位部111、VICS(登録商標)交通情報等外部から提供される交通情報を受信する交通情報受信部112及び、ユーザから到達時間表示条件等を変更する指示を受付ける入力部113より構成される。
【0016】
各種データを保存するDB部12は、道路地図や施設情報が格納された地図DB115、車両の走行経路及び、通過した地点への到達時間を含む走行履歴を格納する走行履歴DB114及び、地図DB115に格納されている施設の内、運転者にとって認識が容易なランドマーク(駅,県市区町村の公共施設,大規模商工業施設、あるいは河川や湖などの地物)や主要道路同士の交差点などの地点データのうち、走行履歴に記憶された経路周辺に存在する主要ランドマーク及び主要交差点を、到達時間を表示する上で重要と判断される地点(重要地点)として格納しておく表示地点DB116より構成される。この表示地点DB116は、走行履歴DB114が更新される毎に併せて更新される。
【0017】
地点処理部13は、測位部111からのデータと地図DB115の情報を用いて自車位置を特定する現在地計算部117、現在位置と走行履歴から今後走行すると予想される予測走行ルートに対する通過地点を選択するために、各重要地点への通過確率を計算する到達地点確率計算処理部118、表示地点DB116に格納されている重要地点の中から表示する地点を選択する主要表示地点選択処理部119、交通情報及びルート情報より各表示地点までの到達時間を計算する地点到達時間演算処理部120,入力部113により利用者が設定した到達時間表示条件等により選択する表示地点選択処理部121より構成される。
【0018】
本発明を用いたシステムにおける処理を図2〜図4に示す。
【0019】
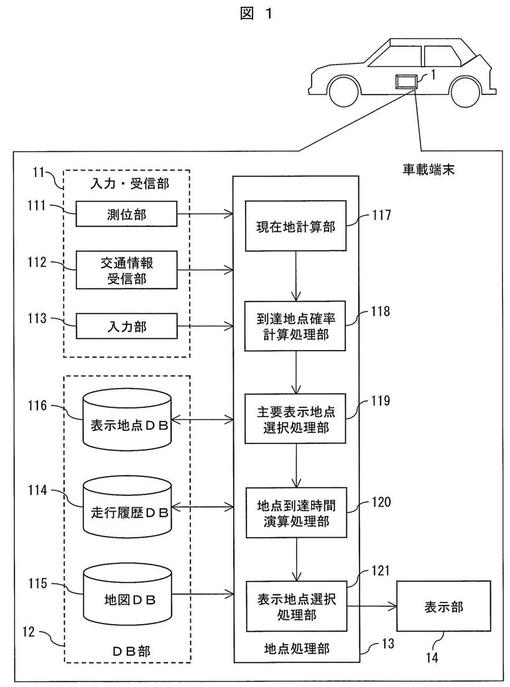
図2はシステム全体の処理フロー図である。
【0020】
車両の現在位置と走行している方向から、過去に走行した履歴データより表示地点選択処理21を行う。ここで選択された表示地点までの到達予測時間計算処理22を現在の交通情報を反映して到達時刻を予測する。地点処理部13では、車両の走行が終了するまでの間、車両の進行位置の変化または時間経過に伴い、逐次、表示地点選択処理21と交通情報を加味した到達予測時間計算処理22の処理を繰り返す。
【0021】
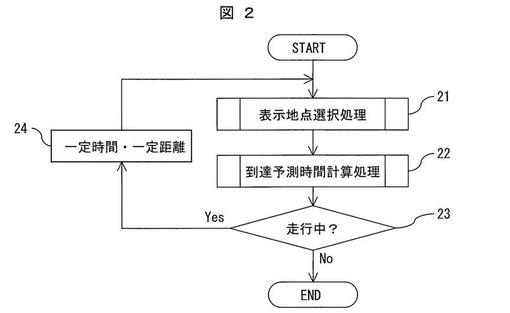
図3はシステム全体の処理フローにおける表示地点選択処理21のフロー図である。表示地点選択処理21では、まず現在地計算部117により、進行方向確定(211)の処理においては、測位部111から得られるセンサ等のデータと、地図DB115に格納されている道路の座標データを基に、マップマッチング処理により逐次求めた現在位置とその車両の走行位置の変化から、走行している道路と進行方向を確定する進行方向確定(211)の処理を行う。次に到達地点確率計算処理部118により、確定した道路と進行方向が一致している過去の走行履歴データを走行履歴DB114から探して、かつて走行したルートの内、記録された回数が多い履歴のルートをこれから走行するルートとして複数の推定走行ルートを選択する複数推定走行ルート選択(212)の処理を行う。なお、確定した道路と進行方向が一致するルートが1種類しか走行履歴にない場合には、そのルート1本だけが推定走行ルートとなる。
【0022】
次に求めた現在位置と進行方向に基づき、現在位置に対し進行方向前方に扇形に広がる所定角度範囲の内に存在する主要なランドマークなどの重要地点を表示地点DB116から抽出し、または、選択した推定走行ルート上で利用者が予め決めておいたカテゴリのPOI情報を地図DB115から選択して主要地点とする進行方向主要地点選択(213)の処理を行う。この選択した各主要地点について、前述の扇形に広がる所定角度範囲の内を通過したルートの総走行回数に対する過去にそれぞれの地点を走行した履歴の回数の割合を、今後その車両が該当する地点に到達する確率(到達地点確率)として求める計算を行う到達地点確率計算(214)の処理を行う。そして主要表示地点選択処理部119により、到達地点確率計算処理部118における各主要地点の到達地点確率の計算結果から、予め定めておいた閾値以上の確率となる主要地点を、運転者に対して到達予想時刻を表示する主要表示地点として選択する主要表示地点検索(215)の処理を行う。
【0023】
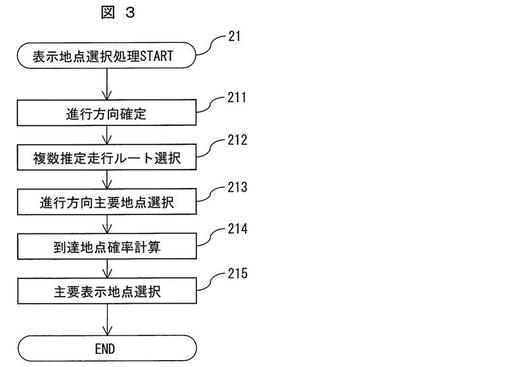
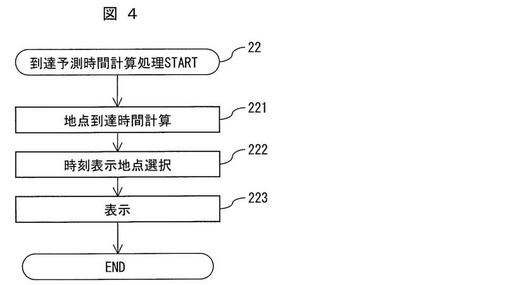
図4はシステム全体の処理フローにおける到達予測時間計算処理22のフロー図である。まず地点到達時間演算処理部120により、主要表示地点選択処理部119における主要表示地点選択(215)の処理で選択された各地点について、交通情報受信部112で受信した現在の交通情報と、地図DB115に格納されている道路区間毎の所要時間、あるいは道路区間長と平均速度の情報から求めた通過時間を元に、その地点までの到達時間を計算する地点到達時間計算(221)の処理を行う。次に表示地点選択処理部121により、前もって利用者による入力部113からの指示により設定された表示条件により計算した到達時間を表示する地点を選択する時刻表示地点選択(222)の処理を行う。この表示条件とは、例えば現在位置から一定距離内に存在する表示地点または、現在位置から一定時間内に到達できる表示地点等の条件であり、入力部113により現在位置からの距離あるいは所要時間を設定する。そして表示地点選択処理部121は、表示選択された地点への到達予想時刻を車載端末の表示部14に表示(223)する。
【0024】
前述のように、この主要到達地点の表示は、車両が走行を終了するまでの間、更新時間毎に処理を繰り返し、各主要到達地点の到達時間が計算される。そして車両の移動に伴い、時刻表示地点選択(222)の処理によって選択された地点のうち表示条件に一致する地点を逐次追加し、刻々表示を更新する。
【0025】
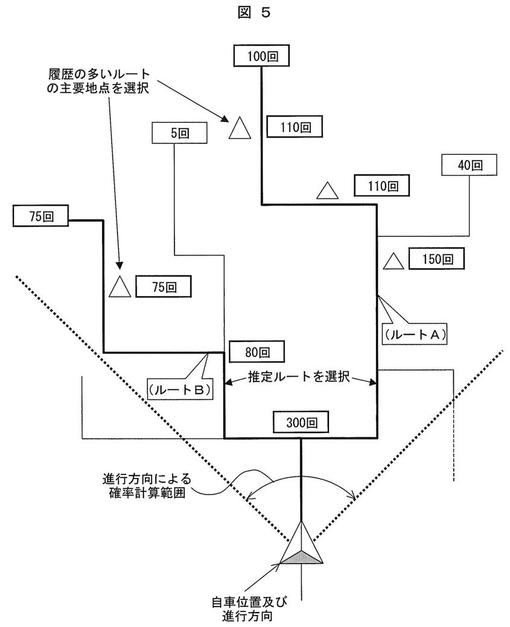
図5を用いて、推定走行ルートを選択する処理の例を説明する。進行方向確定(211)の処理で自車の現在位置及びこの現在位置に対応した道路区間における進行方向が確定すると、現在位置に対し進行方向と一致する過去に走行したルートを走行履歴から抽出し、走行回数の多いものから順に複数のルートを選択して推定走行ルートとする。図5では、走行履歴の回数が最も多かったルート(ルートA)と2番目に多かったルート(ルートB)の2本のルートを推定走行ルートとしている。
【0026】
そして図の破線で示すような現在位置前方の所定角度範囲内を確率計算範囲として、この確率計算範囲に存在する主要地点を表示地点DB116から選択する。次に各主要地点の通過回数を走行履歴から求める。この通過回数は、三角で示す主要ランドマークまたは交差点等の過去に走行したルート周辺に存在する地点を前もって選択して表示地点DB116に格納された地点への到達回数である。図5では、ルート上にこの到達回数をイメージとして表示しているが、実際の表示画面にはこの到達回数は表示されるものではない。この到達回数を使って前述の到達地点確率計算(214)の処理により到達地点確率を計算する。例えば、現在位置から最初の交差点を通過した回数が300回であることから、確率計算範囲を通過したルートの総走行回数は300回となる。これに対し、ルートAで150回通過した主要地点の到達確率は50%、110回通過した主要地点の到達確率は37%となる。同様に、ルートBで最初に通過する主要交差点は80回通過していることからそこへの到達確率は27%、75回通過した主要地点の到達確率は25%となる。一方、到達回数が40回の主要地点は、到達確率が13%となる。このため、到達確率の閾値を25%とした場合、到達回数が75回以上の主要地点が表示主要地点として選択されることになる。このようにして過去の走行履歴の中から主要表示地点選択215によって選択された表示主要地点を含む推定走行ルートを太実線で図5に示す。
【0027】
次に、車両の走行に伴い、現在位置が移動した場合について、図6を用いて、走行中動的に推定走行ルートが変更される処理を説明する。
【0028】
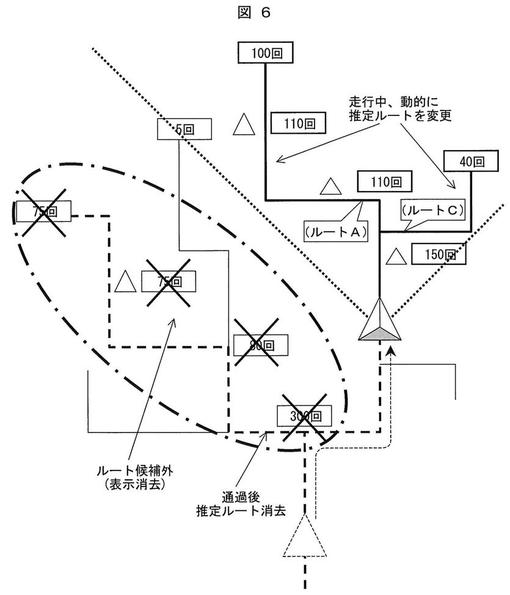
自車位置が進行方向に向かって移動していくに従い、図5の説明で選択された表示主要地点を含む複数の推定走行ルートのうち、分岐点を通過してしまいルート候補から外れた予測走行ルートを順次消去する。また、確率計算範囲から外れた主要表示地点も順次消去する。そして新たな自車位置及び進行方向に対する推定走行ルートの候補を抽出し、逐次追加表示すると共に、新たに表示主要地点を抽出していく。この消去・追加操作は逐次車両の移動に従い、繰り返し行う。
【0029】
図6の例では、分岐点を通過したことから、図5で説明した推定走行ルートの内ルートBがルート候補から外れ、一方新たにルートCが推定走行ルートに加わる。また新たに設定される確率計算範囲について、図5における説明と同様にして主要表示地点が抽出される。図6の例では、最も現在位置に近い主要地点の通過回数が150回であることから、新たな確率計算範囲を通過したルートの総走行回数は150回となる。このため、ルートCに沿った通過回数40回の主要地点の到達確率は27%となり、新たに主要表示地点として選択される。これに対し、図5の説明では主要表示地点として選択されていた、ルートBに沿った通過回数が80回,75回の主要地点は、新たな確率計算範囲から外れるため、主要表示地点ではなくなる。
【0030】
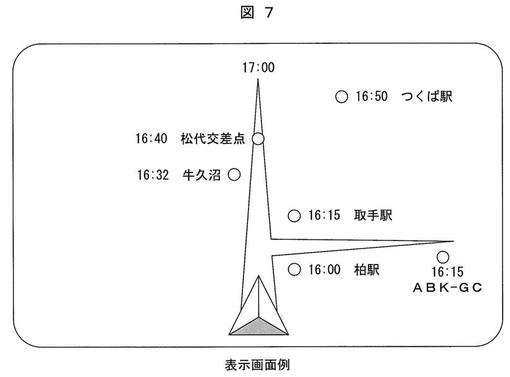
図7に、図6の状態における具体的な車載端末の表示例を示す。車載端末1には、現在地を示す地図及び自車位置を表示している。本発明の推定走行ルートとこれに対応する主要ランドマークまたは交差点等の推定到達時間を運転者に直感的に理解される様、時間と主要ランドマークまたは交差点等を表示する。この表示例は柏駅の付近を走行している場合に、牛久沼経由で科学万博記念公園へ向かって走行する場合の主要表示地点に対応した具体的な地名と到達予測時間を表示した例である。地点表示数については、図6における説明で抽出した主要表示地点について、時刻表示地点選択(222)の処理で自車位置から前記表示条件に従って選択することで、画面に表示している表示範囲の中で利用者に見やすいよう適度な数に絞って表示される。
【0031】
図7に示す表示例では、進行方向に対し主要地点が存在する側に地名と予測到達時間を表示しているが、進行方向に向かって左右に揃えて表示したり、または表示スペースによっては片側のみの表示とすることも可能である。
【0032】
本例では牛久沼推定到達時間は16:32、つくば駅は16:50であり、17:00までの表示範囲の例である。なお、時間の経過と共に、画面表示は更新され、表示されていると即到達時間も刻々と時間が更新される。
【0033】
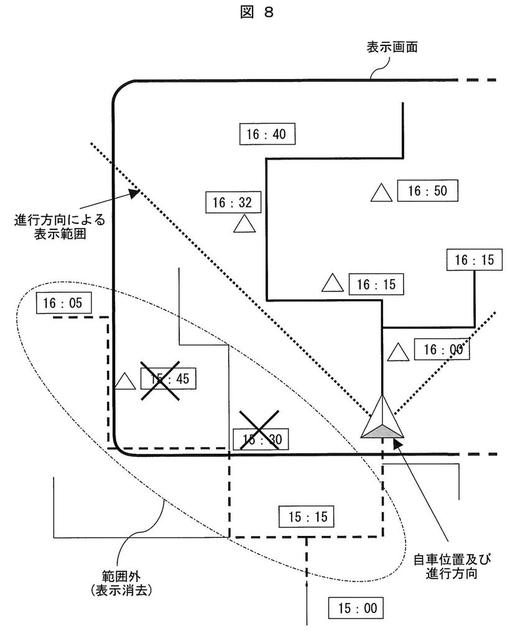
図8に前記表示例の応用としてルート上の主要ランドマークの推定到達時間の表示画面例2を示す。図8は、図6において処理された結果を表示する場合のイメージを示した図であるが、各表示主要地点に対する予測到達時間を計算して運転者に表示している。主要ランドマークを地図上の位置に三角で表し、そこへの推定到達時間を対応付けて表示しているので、予測走行ルートと位置間関係、所要時間を把握しやすく表示した例である。この場合、三角で示す主要ランドマークを実際の地図に重畳表示することで、さらに運転者に理解しやすい表示とすることも可能である。
【0034】
以上は車載端末単独の例としてその実施例を説明したが、本発明はセンタ方式でも実施可能である。図9にそのセンタ方式の実施例を示す。
【0035】
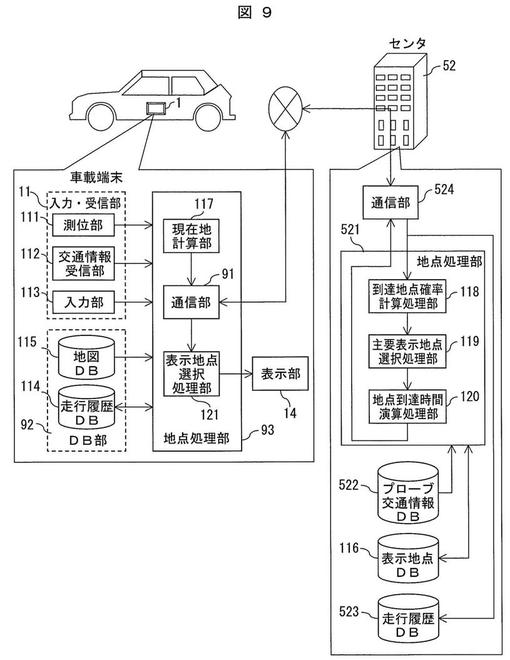
車載端末側の構成は図1で説明したように、大きく入力・受信部11,DB部92,地点処理部93及び、表示部14より構成される。図1で説明した構成と異なる点は、DB部92に表示地点DBが存在しない点と、地点処理部93に到達地点確率計算処理部,主要地点表示選択処理部,地点到達時間演算処理部が存在せず、これらはセンタ52に備わっている点である。また、車載端末1とセンタ52との間で通信を行うため、通信部91と通信部524がそれぞれ車載端末とサーバに設けられている。センタ側を利用した場合はリアルタイムのプローブ交通情報を使って推定到達時間が計算できるので、更に精度の良い情報の提供が可能となる。センタ52は、図1の車載端末における地点処理部13と同様の処理を行う地点処理部521,プローブ交通情報DB522,走行履歴DB523,表示地点DB116を持つ。この地点処理部521は、到達地点確率計算処理部118,主要地点表示選択処理部119,地点到達時間演算処理部120を備えている。センタ52の地点処理部521での推定到達時間処理においてVICS交通情報に加えてリアルタイムのプローブ交通情報DB522を使い、地点処理部521で求められた各主要ランドマーク及び交差点等の推定到達時間を計算し、ネットワークを経由して車載端末側に送信する。
【0036】
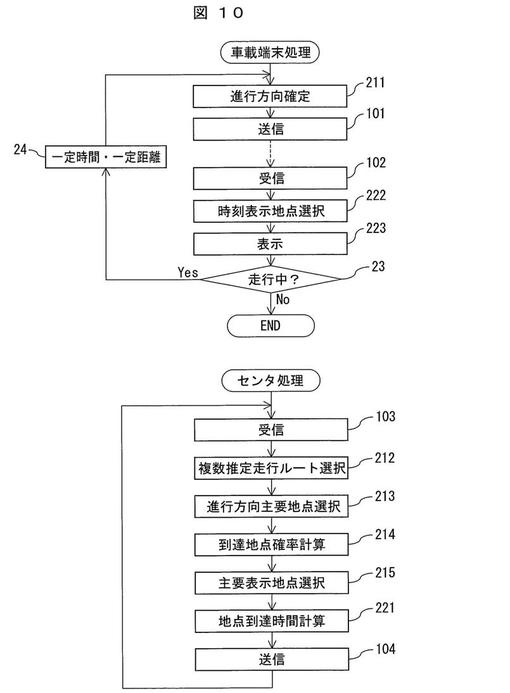
図10に車載端末処理とセンタ処理のフロー図を示す。図2〜図4で説明した処理と同様の処理には同じ符号を付している。車載端末の処理では、進行方向推定211の処理の後、推定した現在位置と現在時刻に車載端末のIDを付して通信部91によりセンタ52へ送信する(101)。そしてセンタ52から表示する推定走行ルートの情報と共に主要表示地点の到達時間を受信する(102)。そして受信した主要表示地点の中から時刻表示地点を選択し(222)、これを表示部14に表示する(223)。
【0037】
一方、センタ処理では、通信部524で受信した車載端末の現在位置と現在時刻を走行履歴DB523に格納しておくと共に、地点処理部521で推定走行ルートの選択と主要表示地点の選択、並びに主要表示地点における到達時間を計算(212〜221)し、選択した推定走行ルートと主要表示地点における到達時間を通信部524により車載端末へ送信する(104)。
【産業上の利用可能性】
【0038】
本発明によれば、カーナビゲーションにおけるルートガイドのみならずGPS携帯の歩行者のガイドシステムとしても利用可能である。
【符号の説明】
【0039】
1 車載端末
11 入力・受信部
12 DB部
13,521 地点処理部
14 表示部
52 センタ
111 測位部
112 交通情報受信部
113 入力部
114,523 走行履歴DB
115 地図DB
116 表示地点DB
117 現在地計算部
118 到達地点確率計算処理部
119 主要表示地点選択処理部
120 地点到達時間演算処理部
121 表示地点選択処理部
522 プローブ交通情報DB
【技術分野】
【0001】
本発明は、自由走行時の地点到達時間予測方法に関する。
【背景技術】
【0002】
現行ナビでは目的地を設定し経路誘導を実施している。しかし、生活圏内走行時やよく行く地点へ行くときなどにおいては、経路誘導機能を使わないことも多々ある。自由走行をしている場合としては、利用者が現在住んでいるもしくは過去に住んでいた等のよく知っている土地を走行する場合や、何度も行っていたため覚えている等の理由が多い。つまり、自由走行をしているときの利用者が意図している目的地や走行経路は、過去に行ったことのある場所、通ったことのある経路である場合が多いという特徴がある。
【0003】
自由走行時においても交通情報は利用者にとって有益な情報であることから、過去に右左折した交差点の情報を使い、現在走行している道路の前方に過去に右左折した交差点が現れたときには、から判断し2つ先の交通情報を表示することで、見やすく適切な情報を提示するという技術が、特開2007−71814号公報に開示されている。
【0004】
また、現在地からの到達可能範囲を一定時間毎に区切って地図上に表示することにより、という技術が、WO07/032318に開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−71814号公報
【特許文献2】WO07/032318
【発明の概要】
【発明が解決しようとする課題】
【0006】
利用者が自由走行を行っているときにおいては、前記のような理由から利用者は既知の経路を走行している場合が多い。自由走行時には経路案内は不要であるが、時間帯や天候などに応じて交通状況は変化するため、利用者の意図した目的地及び、経路上の主要ランドマークまたは交差点等への交通情報を加味した所要時間や、一定時間内に到達可能な地点は、利用者にとって重要な情報となる。
【0007】
しかし、特許文献1に開示されているナビゲーション用交通情報案内装置では、進むと推測される経路上で、かつ現在地付近に絞って交通情報を表示することしかできないため、利用者の意図した目的地及び、経路上の主要ランドマークまたは交差点等への交通情報を加味した所要時間や、一定時間内に到達可能な地点を知ることはできない。
【0008】
また、特許文献2に開示されている地図表示装置では、現在地から全方向において到達可能な範囲を地図上に表示するため、利用者の意図した目的地及び、経路上の主要ランドマークまたは交差点等への交通情報を加味した所要時間や、一定時間内に到達可能な地点を容易に把握することが困難であった。
【課題を解決するための手段】
【0009】
本発明のナビゲーション装置は、過去の走行履歴に基づき現在位置から前方に存在する代表的な地点への通過確率を求める到達地点確率計算処理部と、現在位置から今後走行するルートを推定したルートに基づき前記代表的な地点から主要表示地点を選択する主要表示地点選択処理部と、各主要表示地点について、交通情報を加味した所要時間を求める地点到達時間演算部と、現在位置から所定の時間内に到達可能な地点を主要表示地点の中から選択する表示地点選択処理部とを備える。
【発明の効果】
【0010】
本発明により、経路探索を行わないまま意図している目的地方面に走行した場合、一定時間内に到達可能な地点と、そこに到達するまでに要する時間を容易に把握することが可能となる。そして、到達可能な地点までの所要時間がわかるようになることで、それぞれの地点付近までの到達可能時間も利用者は容易に想定することができるようになる。
【0011】
これにより、自由走行時において利用者の意図している目的地までの経路は既知であるため、過去に行ったことのある地点を表示することで、意図している目的地への到達時間を類推することができるようになり、利用者は早い段階で意図している目的地へ向かうか否かの判断をすることができる。
【図面の簡単な説明】
【0012】
【図1】システム構成図。
【図2】システム全体の処理フロー図。
【図3】到達地点選択処理フロー図。
【図4】到達予測時間計算処理フロー図。
【図5】推定走行ルートを選択する図。
【図6】走行中、動的に推定走行ルートを変更する動作を説明する図。
【図7】表示画面の例を示す図。
【図8】画面表示の動作を説明する図。
【図9】センタ方式を示す図。
【図10】センタ方式における処理フロー図。
【発明を実施するための形態】
【0013】
以下、図面を参照しながら本発明の具体的実施形態について説明する。
【実施例】
【0014】
図1に本発明の全体のシステム構成を示す。
【0015】
本発明のナビゲーションシステムは、大きく入力・受信部11,各種データを保存するDB部12,表示地点への到達時刻を計算する地点処理部13及び、各地点の到達時間を表示する表示部14より構成される。入力・受信部11はGPSやセンサ等で計測したデータに基づき自車位置を測定する測位部111、VICS(登録商標)交通情報等外部から提供される交通情報を受信する交通情報受信部112及び、ユーザから到達時間表示条件等を変更する指示を受付ける入力部113より構成される。
【0016】
各種データを保存するDB部12は、道路地図や施設情報が格納された地図DB115、車両の走行経路及び、通過した地点への到達時間を含む走行履歴を格納する走行履歴DB114及び、地図DB115に格納されている施設の内、運転者にとって認識が容易なランドマーク(駅,県市区町村の公共施設,大規模商工業施設、あるいは河川や湖などの地物)や主要道路同士の交差点などの地点データのうち、走行履歴に記憶された経路周辺に存在する主要ランドマーク及び主要交差点を、到達時間を表示する上で重要と判断される地点(重要地点)として格納しておく表示地点DB116より構成される。この表示地点DB116は、走行履歴DB114が更新される毎に併せて更新される。
【0017】
地点処理部13は、測位部111からのデータと地図DB115の情報を用いて自車位置を特定する現在地計算部117、現在位置と走行履歴から今後走行すると予想される予測走行ルートに対する通過地点を選択するために、各重要地点への通過確率を計算する到達地点確率計算処理部118、表示地点DB116に格納されている重要地点の中から表示する地点を選択する主要表示地点選択処理部119、交通情報及びルート情報より各表示地点までの到達時間を計算する地点到達時間演算処理部120,入力部113により利用者が設定した到達時間表示条件等により選択する表示地点選択処理部121より構成される。
【0018】
本発明を用いたシステムにおける処理を図2〜図4に示す。
【0019】
図2はシステム全体の処理フロー図である。
【0020】
車両の現在位置と走行している方向から、過去に走行した履歴データより表示地点選択処理21を行う。ここで選択された表示地点までの到達予測時間計算処理22を現在の交通情報を反映して到達時刻を予測する。地点処理部13では、車両の走行が終了するまでの間、車両の進行位置の変化または時間経過に伴い、逐次、表示地点選択処理21と交通情報を加味した到達予測時間計算処理22の処理を繰り返す。
【0021】
図3はシステム全体の処理フローにおける表示地点選択処理21のフロー図である。表示地点選択処理21では、まず現在地計算部117により、進行方向確定(211)の処理においては、測位部111から得られるセンサ等のデータと、地図DB115に格納されている道路の座標データを基に、マップマッチング処理により逐次求めた現在位置とその車両の走行位置の変化から、走行している道路と進行方向を確定する進行方向確定(211)の処理を行う。次に到達地点確率計算処理部118により、確定した道路と進行方向が一致している過去の走行履歴データを走行履歴DB114から探して、かつて走行したルートの内、記録された回数が多い履歴のルートをこれから走行するルートとして複数の推定走行ルートを選択する複数推定走行ルート選択(212)の処理を行う。なお、確定した道路と進行方向が一致するルートが1種類しか走行履歴にない場合には、そのルート1本だけが推定走行ルートとなる。
【0022】
次に求めた現在位置と進行方向に基づき、現在位置に対し進行方向前方に扇形に広がる所定角度範囲の内に存在する主要なランドマークなどの重要地点を表示地点DB116から抽出し、または、選択した推定走行ルート上で利用者が予め決めておいたカテゴリのPOI情報を地図DB115から選択して主要地点とする進行方向主要地点選択(213)の処理を行う。この選択した各主要地点について、前述の扇形に広がる所定角度範囲の内を通過したルートの総走行回数に対する過去にそれぞれの地点を走行した履歴の回数の割合を、今後その車両が該当する地点に到達する確率(到達地点確率)として求める計算を行う到達地点確率計算(214)の処理を行う。そして主要表示地点選択処理部119により、到達地点確率計算処理部118における各主要地点の到達地点確率の計算結果から、予め定めておいた閾値以上の確率となる主要地点を、運転者に対して到達予想時刻を表示する主要表示地点として選択する主要表示地点検索(215)の処理を行う。
【0023】
図4はシステム全体の処理フローにおける到達予測時間計算処理22のフロー図である。まず地点到達時間演算処理部120により、主要表示地点選択処理部119における主要表示地点選択(215)の処理で選択された各地点について、交通情報受信部112で受信した現在の交通情報と、地図DB115に格納されている道路区間毎の所要時間、あるいは道路区間長と平均速度の情報から求めた通過時間を元に、その地点までの到達時間を計算する地点到達時間計算(221)の処理を行う。次に表示地点選択処理部121により、前もって利用者による入力部113からの指示により設定された表示条件により計算した到達時間を表示する地点を選択する時刻表示地点選択(222)の処理を行う。この表示条件とは、例えば現在位置から一定距離内に存在する表示地点または、現在位置から一定時間内に到達できる表示地点等の条件であり、入力部113により現在位置からの距離あるいは所要時間を設定する。そして表示地点選択処理部121は、表示選択された地点への到達予想時刻を車載端末の表示部14に表示(223)する。
【0024】
前述のように、この主要到達地点の表示は、車両が走行を終了するまでの間、更新時間毎に処理を繰り返し、各主要到達地点の到達時間が計算される。そして車両の移動に伴い、時刻表示地点選択(222)の処理によって選択された地点のうち表示条件に一致する地点を逐次追加し、刻々表示を更新する。
【0025】
図5を用いて、推定走行ルートを選択する処理の例を説明する。進行方向確定(211)の処理で自車の現在位置及びこの現在位置に対応した道路区間における進行方向が確定すると、現在位置に対し進行方向と一致する過去に走行したルートを走行履歴から抽出し、走行回数の多いものから順に複数のルートを選択して推定走行ルートとする。図5では、走行履歴の回数が最も多かったルート(ルートA)と2番目に多かったルート(ルートB)の2本のルートを推定走行ルートとしている。
【0026】
そして図の破線で示すような現在位置前方の所定角度範囲内を確率計算範囲として、この確率計算範囲に存在する主要地点を表示地点DB116から選択する。次に各主要地点の通過回数を走行履歴から求める。この通過回数は、三角で示す主要ランドマークまたは交差点等の過去に走行したルート周辺に存在する地点を前もって選択して表示地点DB116に格納された地点への到達回数である。図5では、ルート上にこの到達回数をイメージとして表示しているが、実際の表示画面にはこの到達回数は表示されるものではない。この到達回数を使って前述の到達地点確率計算(214)の処理により到達地点確率を計算する。例えば、現在位置から最初の交差点を通過した回数が300回であることから、確率計算範囲を通過したルートの総走行回数は300回となる。これに対し、ルートAで150回通過した主要地点の到達確率は50%、110回通過した主要地点の到達確率は37%となる。同様に、ルートBで最初に通過する主要交差点は80回通過していることからそこへの到達確率は27%、75回通過した主要地点の到達確率は25%となる。一方、到達回数が40回の主要地点は、到達確率が13%となる。このため、到達確率の閾値を25%とした場合、到達回数が75回以上の主要地点が表示主要地点として選択されることになる。このようにして過去の走行履歴の中から主要表示地点選択215によって選択された表示主要地点を含む推定走行ルートを太実線で図5に示す。
【0027】
次に、車両の走行に伴い、現在位置が移動した場合について、図6を用いて、走行中動的に推定走行ルートが変更される処理を説明する。
【0028】
自車位置が進行方向に向かって移動していくに従い、図5の説明で選択された表示主要地点を含む複数の推定走行ルートのうち、分岐点を通過してしまいルート候補から外れた予測走行ルートを順次消去する。また、確率計算範囲から外れた主要表示地点も順次消去する。そして新たな自車位置及び進行方向に対する推定走行ルートの候補を抽出し、逐次追加表示すると共に、新たに表示主要地点を抽出していく。この消去・追加操作は逐次車両の移動に従い、繰り返し行う。
【0029】
図6の例では、分岐点を通過したことから、図5で説明した推定走行ルートの内ルートBがルート候補から外れ、一方新たにルートCが推定走行ルートに加わる。また新たに設定される確率計算範囲について、図5における説明と同様にして主要表示地点が抽出される。図6の例では、最も現在位置に近い主要地点の通過回数が150回であることから、新たな確率計算範囲を通過したルートの総走行回数は150回となる。このため、ルートCに沿った通過回数40回の主要地点の到達確率は27%となり、新たに主要表示地点として選択される。これに対し、図5の説明では主要表示地点として選択されていた、ルートBに沿った通過回数が80回,75回の主要地点は、新たな確率計算範囲から外れるため、主要表示地点ではなくなる。
【0030】
図7に、図6の状態における具体的な車載端末の表示例を示す。車載端末1には、現在地を示す地図及び自車位置を表示している。本発明の推定走行ルートとこれに対応する主要ランドマークまたは交差点等の推定到達時間を運転者に直感的に理解される様、時間と主要ランドマークまたは交差点等を表示する。この表示例は柏駅の付近を走行している場合に、牛久沼経由で科学万博記念公園へ向かって走行する場合の主要表示地点に対応した具体的な地名と到達予測時間を表示した例である。地点表示数については、図6における説明で抽出した主要表示地点について、時刻表示地点選択(222)の処理で自車位置から前記表示条件に従って選択することで、画面に表示している表示範囲の中で利用者に見やすいよう適度な数に絞って表示される。
【0031】
図7に示す表示例では、進行方向に対し主要地点が存在する側に地名と予測到達時間を表示しているが、進行方向に向かって左右に揃えて表示したり、または表示スペースによっては片側のみの表示とすることも可能である。
【0032】
本例では牛久沼推定到達時間は16:32、つくば駅は16:50であり、17:00までの表示範囲の例である。なお、時間の経過と共に、画面表示は更新され、表示されていると即到達時間も刻々と時間が更新される。
【0033】
図8に前記表示例の応用としてルート上の主要ランドマークの推定到達時間の表示画面例2を示す。図8は、図6において処理された結果を表示する場合のイメージを示した図であるが、各表示主要地点に対する予測到達時間を計算して運転者に表示している。主要ランドマークを地図上の位置に三角で表し、そこへの推定到達時間を対応付けて表示しているので、予測走行ルートと位置間関係、所要時間を把握しやすく表示した例である。この場合、三角で示す主要ランドマークを実際の地図に重畳表示することで、さらに運転者に理解しやすい表示とすることも可能である。
【0034】
以上は車載端末単独の例としてその実施例を説明したが、本発明はセンタ方式でも実施可能である。図9にそのセンタ方式の実施例を示す。
【0035】
車載端末側の構成は図1で説明したように、大きく入力・受信部11,DB部92,地点処理部93及び、表示部14より構成される。図1で説明した構成と異なる点は、DB部92に表示地点DBが存在しない点と、地点処理部93に到達地点確率計算処理部,主要地点表示選択処理部,地点到達時間演算処理部が存在せず、これらはセンタ52に備わっている点である。また、車載端末1とセンタ52との間で通信を行うため、通信部91と通信部524がそれぞれ車載端末とサーバに設けられている。センタ側を利用した場合はリアルタイムのプローブ交通情報を使って推定到達時間が計算できるので、更に精度の良い情報の提供が可能となる。センタ52は、図1の車載端末における地点処理部13と同様の処理を行う地点処理部521,プローブ交通情報DB522,走行履歴DB523,表示地点DB116を持つ。この地点処理部521は、到達地点確率計算処理部118,主要地点表示選択処理部119,地点到達時間演算処理部120を備えている。センタ52の地点処理部521での推定到達時間処理においてVICS交通情報に加えてリアルタイムのプローブ交通情報DB522を使い、地点処理部521で求められた各主要ランドマーク及び交差点等の推定到達時間を計算し、ネットワークを経由して車載端末側に送信する。
【0036】
図10に車載端末処理とセンタ処理のフロー図を示す。図2〜図4で説明した処理と同様の処理には同じ符号を付している。車載端末の処理では、進行方向推定211の処理の後、推定した現在位置と現在時刻に車載端末のIDを付して通信部91によりセンタ52へ送信する(101)。そしてセンタ52から表示する推定走行ルートの情報と共に主要表示地点の到達時間を受信する(102)。そして受信した主要表示地点の中から時刻表示地点を選択し(222)、これを表示部14に表示する(223)。
【0037】
一方、センタ処理では、通信部524で受信した車載端末の現在位置と現在時刻を走行履歴DB523に格納しておくと共に、地点処理部521で推定走行ルートの選択と主要表示地点の選択、並びに主要表示地点における到達時間を計算(212〜221)し、選択した推定走行ルートと主要表示地点における到達時間を通信部524により車載端末へ送信する(104)。
【産業上の利用可能性】
【0038】
本発明によれば、カーナビゲーションにおけるルートガイドのみならずGPS携帯の歩行者のガイドシステムとしても利用可能である。
【符号の説明】
【0039】
1 車載端末
11 入力・受信部
12 DB部
13,521 地点処理部
14 表示部
52 センタ
111 測位部
112 交通情報受信部
113 入力部
114,523 走行履歴DB
115 地図DB
116 表示地点DB
117 現在地計算部
118 到達地点確率計算処理部
119 主要表示地点選択処理部
120 地点到達時間演算処理部
121 表示地点選択処理部
522 プローブ交通情報DB
【特許請求の範囲】
【請求項1】
地図データを記憶し、現在位置を取得して地図データ上に現在位置を表示するナビゲーション装置において、
過去の移動履歴を記憶する移動履歴DBと、
前記移動履歴に基づき、現在位置の前方に存在する代表的地点への到達確率計算する到達地点確率計算手段と、
前記移動履歴に基づき、現在位置から進行方向の一致する複数のルートを選択し、各ルート上の前記代表的地点を主要表示地点として選択する主要表示地点選択処理手段と、
前記主要表示地点について到達予測時間を計算する地点到達時間演算手段と、
現在位置から所定の時間内に到達可能な地点を前記主要表示地点の中から選択する表示地点選択処理手段と
を備え、
前記選択された主要表示地点とその到達予測時間を表示することを特徴としたナビゲーション装置。
【請求項2】
地図データを記憶し、現在位置を取得して地図データ上に現在位置を表示する端末装置と、端末装置から現在位置の情報を取得して、各端末装置毎の移動履歴を記憶する記憶手段を備えたセンタ装置からなるナビゲーションシステムにおいて、
前記センタ装置は、
前記端末装置の移動履歴に基づき、該端末装置の現在位置の前方に存在する代表的地点への到達確率計算する到達地点確率計算手段と、
前記移動履歴に基づき、該端末装置の現在位置から進行方向の一致する複数のルートを選択し、各ルート上の前記代表的地点を主要表示地点として選択する主要表示地点選択処理手段と、
前記主要表示地点について到達予測時間を計算する地点到達時間演算手段と、
現在位置から所定の時間内に到達可能な地点を前記主要表示地点の中から選択する表示地点選択処理手段と、
前記選択された所要時間内に到達可能な地点と到達予測時間を端末装置に送信する通信手段を備え、
前記端末装置は、前記センタ装置から受信した前記到達可能な地点とその到達予測時間を表示することを特徴としたナビゲーションシステム。
【請求項3】
請求項1において、前記ナビゲーション装置の現在位置の変化に従い、表示する地点と到達予測時間を更新することを特徴としたナビゲーション装置。
【請求項4】
請求項2において、前記端末装置からの現在位置の変化に従い、端末装置に送信する所要時間内に到達可能な地点と到達予測時間を更新することを特徴としたナビゲーションシステム。
【請求項1】
地図データを記憶し、現在位置を取得して地図データ上に現在位置を表示するナビゲーション装置において、
過去の移動履歴を記憶する移動履歴DBと、
前記移動履歴に基づき、現在位置の前方に存在する代表的地点への到達確率計算する到達地点確率計算手段と、
前記移動履歴に基づき、現在位置から進行方向の一致する複数のルートを選択し、各ルート上の前記代表的地点を主要表示地点として選択する主要表示地点選択処理手段と、
前記主要表示地点について到達予測時間を計算する地点到達時間演算手段と、
現在位置から所定の時間内に到達可能な地点を前記主要表示地点の中から選択する表示地点選択処理手段と
を備え、
前記選択された主要表示地点とその到達予測時間を表示することを特徴としたナビゲーション装置。
【請求項2】
地図データを記憶し、現在位置を取得して地図データ上に現在位置を表示する端末装置と、端末装置から現在位置の情報を取得して、各端末装置毎の移動履歴を記憶する記憶手段を備えたセンタ装置からなるナビゲーションシステムにおいて、
前記センタ装置は、
前記端末装置の移動履歴に基づき、該端末装置の現在位置の前方に存在する代表的地点への到達確率計算する到達地点確率計算手段と、
前記移動履歴に基づき、該端末装置の現在位置から進行方向の一致する複数のルートを選択し、各ルート上の前記代表的地点を主要表示地点として選択する主要表示地点選択処理手段と、
前記主要表示地点について到達予測時間を計算する地点到達時間演算手段と、
現在位置から所定の時間内に到達可能な地点を前記主要表示地点の中から選択する表示地点選択処理手段と、
前記選択された所要時間内に到達可能な地点と到達予測時間を端末装置に送信する通信手段を備え、
前記端末装置は、前記センタ装置から受信した前記到達可能な地点とその到達予測時間を表示することを特徴としたナビゲーションシステム。
【請求項3】
請求項1において、前記ナビゲーション装置の現在位置の変化に従い、表示する地点と到達予測時間を更新することを特徴としたナビゲーション装置。
【請求項4】
請求項2において、前記端末装置からの現在位置の変化に従い、端末装置に送信する所要時間内に到達可能な地点と到達予測時間を更新することを特徴としたナビゲーションシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−2932(P2013−2932A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−133794(P2011−133794)
【出願日】平成23年6月16日(2011.6.16)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月16日(2011.6.16)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
[ Back to top ]