
ナビゲーションのための方法およびシステム
【課題】ナビゲーションのための方法およびシステムの提供。
【解決手段】道路区分(150、150´、151、153)を有する保存された地図データを備えたナビゲーションシステムを用いて車両をナビゲートする方法であって、現在の道路区分(150、151、153)および現在の道路区分(150、151、153)内の車両の現在位置(100)を決定するステップと、入力装置(900)を用いてユーザーによる入力を決定するステップと、現在の道路区分(151、153)内、または現在の道路区分(150)の並行車線の別の道路区分(150´)内で、目的地(200、203)を決定するステップであって、決定が前記入力によって開始されるステップと、現在位置(100)から目的地(200、203)へのルート(300、303)を現在の道路区分(150、151、153)内で方向転換操作をすることなく計算するステップとを含む方法。
【解決手段】道路区分(150、150´、151、153)を有する保存された地図データを備えたナビゲーションシステムを用いて車両をナビゲートする方法であって、現在の道路区分(150、151、153)および現在の道路区分(150、151、153)内の車両の現在位置(100)を決定するステップと、入力装置(900)を用いてユーザーによる入力を決定するステップと、現在の道路区分(151、153)内、または現在の道路区分(150)の並行車線の別の道路区分(150´)内で、目的地(200、203)を決定するステップであって、決定が前記入力によって開始されるステップと、現在位置(100)から目的地(200、203)へのルート(300、303)を現在の道路区分(150、151、153)内で方向転換操作をすることなく計算するステップとを含む方法。
【発明の詳細な説明】
【技術分野】
【0001】
種々の実施形態が、ナビゲーションのための方法およびシステムに関する。
【背景技術】
【0002】
欧州特許第2 068 121 B1号明細書により、ルートガイダンス機能と、ユーザーへルートガイダンスを提供する方法を含む、ナビゲーションシステムが示されている。ナビゲーションシステムは、当該ナビゲーションシステム内にユーザーが入力した目的地へのルートガイダンスを実施するために、ユーザーの位置を検出する。ナビゲーションシステムは、旅行のためにユーザーが利用する車両の位置を検出し、そこで車両の位置は、典型的には、車両内のナビゲーションセンサー、GPS(グローバル・ポジショニング・システム)レシーバーのようなレシーバー、および検出された位置周辺のエリアに相当する地図データを用いることによって検出される。一般的に、ナビゲーションシステムは、それぞれ、ディスプレイスクリーン上に地図イメージを表示してよく、車両またはユーザーの現在地を示唆しているマークを表示してよい。ナビゲーションシステムは、ユーザーによって入力された開始点から目的地までのルートを計算する、ルートプロセシング装置によって、ルートを検索可能である。車両の現在地は、当該車両の移動によって変化するため、車両の位置マークは、ディスプレイスクリーン上でルートに沿って移動し、または車両に対して隣接する地図イメージは、ディスプレイスクリーン上、先に決定された位置で車両位置マークが存続する間でスクロールする。ユーザーが現在方向での移動から、他の方向への移動へ、操作を作成することが必要であるルート上の決定された操作点に車両が接近したとき、例えば、ユーザーが旅行している道を変更したとき、ルートプロセシング装置が、操作点を示唆する、例えば、ユーザーが旅行している道から去るべきであることを示唆するルートに関して、ユーザーに情報を提供する。例えば、ユーザーが、右側にある次の出口にて、旅行している高速道路から降りなければならないことを示唆するように、ディスプレイスクリーニングが操作点にてユーザーが取らなければならない方向を示唆する矢印を示す。あるいは、またはさらに、ナビゲーションシステムはまた、音声出力によってユーザーに操作点を示唆してよい。
【0003】
欧州特許第2 068 121 B1号明細書には、目的地への最初のルートを計算し、その最初のルートに関する情報をユーザーに提供するために適合したルートプロセシング装置を含む、ルートガイダンス機能を含むナビゲーションシステムが示されている。ナビゲーションシステムは、ユーザーが第一の方向での移動から、第二の方向での移動に、操作を実施することを要求される、少なくとも1つの操作点を決定する。ナビゲーションシステムには、少なくとも1つの操作点に関する情報を受領するために適合し、ユーザーに対して操作を実施することが目下要求されている減速値を計算するために適合した、減速計算装置が含まれる。減速計算装置は、減速値が、先に決定された参照値を超えているかどうかを決定するために適合する。ルートプロセシング装置は、第一ルートの対案としての、目的地への第二ルートを計算するために適合し、そこでは、第二ルートにしたがって、ユーザーは、操作点にて操作を実施することは要求されない。
【0004】
国際公開第2008/112335 A1号パンフレットより、予測最小燃料利用の推奨ルートを決定するための、器具および方法が知られている。例えば、ルート決定機は、使用されうる推定燃料量を計算することにおいて、推定速度に対して、区分のスピード制限プラス10マイル/時間を利用する。
【発明の概要】
【課題を解決するための手段】
【0005】
1つの様態にしたがって、ナビゲーションに対する方法への改善が、独立した請求項1の特徴を持つ方法を通して記述される。好都合な改善は、独立した請求項の主題であり、本明細書に含まれる。
【0006】
したがって、道路区分を持つ保存された地図データを含むナビゲーションシステムの方法による、車両のナビゲーションのための方法が提供される。本方法において、現在の道路区分と、現在の道路区分中の現在地が決定されうる。現在地は、レシーバーによって決定される、サテライトシグナル(GPS)に基づいてよい。現在地は、現在地に基づいて連続的に決定されてよい。現在の道路区分は現在地と関連してよい。現在道路区分は、現在地と、道路区分の先に定義された位置範囲を比較することによって、保存された地図データから決定されてよい。現在地と関連した現在道路区分は、局所的に保存された地図データから決定されてよい。これに関する道路区分は、地図データ中の2つの点の間で定義されてよい。
【0007】
本方法において、入力装置を利用してのユーザーによる入力が決定されてよい。ユーザーによる入力は、ボタンまたはタッチスクリーンによってマニュアルで、またはスピーチ認識によるボイスコマンドを介して行われてよい。
【0008】
本方法において、現在道路区分中、または現在道路区分の並行車線の他の道路区分中の目的地が決定されてよい。決定は、入力によって開始されてよい。決定は、さらなる入力なしに、自動的に起ってもよい。しかしながら、ユーザーによる目的地の住所の入力は必要ない。
【0009】
本方法において、現在地から目的地へのルートは、現在道路区分内の方向転換操作なしに計算されてよい。ルートガイダンスは、ルートが計算される後開始されてよい。ルートガイダンスは、即時に、すなわちユーザーからのさらなる入力なしに開始されてよい。
【0010】
1つの様態にしたがって、ナビゲーションシステムに対する改善が、独立した請求項9の特徴を持つシステムを通して記述される。種々の改善が本記述に含まれる。
【0011】
したがって、ナビゲーションに対するシステムが提供される。システムは、ユーザーによる入力のための入力装置を含んでよい。システムは、道路区分を含む保存された地図データを持つデータベースに連結可能な、計算ロジック装置を持ってよい。
【0012】
計算ロジック装置は、入力に基づく目的地までのルートを計算するために設定されてよい。
【0013】
計算ロジック装置は、現在道路区分と、現在道路区分中の現在地を決定するために設定されてよい。現在道路区分は、現在地に関連してよい。
【0014】
計算ロジック装置は、現在道路区分中、または現在道路区分の並行車線の他の道路区分中の目的地を決定するために設定されてよい。目的地の決定は、入力によって開始されてよい。
【0015】
計算ロジック装置は、現在地から目的地までのルートを、現在道路区分内の方向転換操作なしに、計算するために設定されてよい。
【0016】
計算ロジック装置は、ルートガイダンスを開始するために設定されてよい。ルートガイダンスは、操作指示の方法によって、例えばディスプレイ装置上にルートを示すことによって実施されてよい。
【0017】
本明細書以下で記述する改善は、ナビゲーションのためのシステムおよび方法両方に関する。
【0018】
1つの実施形態にしたがって、目的地は、現在地にオフセットを加えることによって計算されてよい。1つの実施形態にしたがって、オフセットを、それぞれ運転方向とは逆、または並行車線に面して加えてよい。
【0019】
方向転換操作の代わりに、左ターンおよび右ターンのみが許容されてよい。結果として、運転者にとって、例えば非常に交通量が多いために、方向転換操作が不可能である場合、運転方向のもっとも迅速な逆転が可能になる。
【0020】
1つの実施形態において、ルートは、入力によって変更されてよい。1つの実施形態において、ルートは、入力によって、計算された異なるルートより選択されてよい。いくつかの計算されたルートの1つが選択されてよい。異なるルート間の選択は、連続ボタン作動によって行われうる。
【0021】
1つの実施形態において、ルートは、運転操作が、入力によるルートの計算に対して許容されるか、またはされないように変更されてよい。運転操作は、「方向転換」であってよい。入力の第一作動において、方向転換が許容されてよく、一方で、入力の第二作動において、方向転換が許容されなくてよく、それによって計算された第一ルートが、第一作動と関連し、計算された第二ルートが第二作動に関連してよい。
【0022】
1つの実施形態において、入力は、多数の、正確な1つの入力ステップまたは正確な2つの入力ステップによって発生してよい。非常にわずかな入力ステップのために、交通状況からの運転者の注意力散漫が最小まで減少する。入力は、単一ボタン入力または単一ボイスコマンドによって達成されてよい。あるいは、入力は、第一入力段階としてメインメニューを開くこと、および第二入力段階として機能を選択することによって達成されてよく、それによってメインメニューの機能が即時に実施されなければならない。
【0023】
1つの実施形態において、現在道路区分内での車両の動きの第1の方向が決定されてよい。第1の方向は、地図データ中ポイントAからポイントBまでの方向として、または主要方向として定義されてよい。方向は、多数の決定された位置に基づいて特定化されてよい。
【0024】
1つの実施形態において、入力は、第2の方向と関連してよい。第2の方向は、第1の方向に基づいて決定されてよく、地図データに基づいて決定されてよい。第2の方向は、地図データ中の2つのポイントA、B間で、または主要方向として定義されてよい。
【0025】
1つの実施形態において、第2の方向と第1の方向は異なってよい。第1の方向と第2の方向は、鈍角において互いに異なりうる。目的地は、現在地と第2の方向両方に基づいて決定されてよい。
【0026】
1つの実施形態において、計算ロジック装置は、第1の方向に基づき、任意に地図データに基づく第2の方向を決定するために設定されてよい。第2の方向は、道路区分が一方通行通りでない場合、第1の方向と反対に設定されてよい。
【0027】
1つの実施形態において、現在道路区分内の車両の動きの第1の方向が決定されてよい。第2の方向が、入力に基づいて、道路区分が一方通行通りでない場合、第1の方向と反対に設定されてよい。第2の方向は、道路区分が一方通行通りである場合に、第1の方向に相当してよい。
【0028】
1つの実施形態において、現在道路区分が一方通行通りの場合、目的地の決定が 無効化されてよく、または情報アイテムが出力である。出力は、通りが一方通行である場合に、可聴警告信号かまたは可聴説明文であり、それによって通りで方向転換することが不可能である。出力はまた、例えば点滅方向矢印にように視覚可能でもあり得る。
【0029】
すべての実施形態は、互いに組み合わせ可能である。いくつかの可能性ある組み合わせが、図の記述にて説明される。しかしながら、これらの描写された可能性ある改善異形の組み合わせは、決定的なものではない。
【0030】
例えば、本願発明は以下の項目を提供する。
(項目1)
道路区分(150、150´、151、153)を有する保存された地図データを備えたナビゲーションシステムを用いて、車両をナビゲートする方法であって、
−現在の道路区分(150、151、153)および上記現在の道路区分(150、151、153)内の上記車両の現在位置(100)を決定するステップと、
−入力装置(900)を用いてユーザーによる入力を決定するステップと、
−上記現在の道路区分(151、153)内、または上記現在の道路区分(150)の並行車線の別の道路区分(150´)内で、目的地(200、203)を決定するステップであって、上記決定が上記入力によって開始されるステップと、
−上記現在位置(100)から上記目的地(200、203)へのルート(300、303)を、上記現在の道路区分(150、151、153)内で方向転換操作をすることなく、計算するステップとを含む方法。
(項目2)
−上記目的地(200、203)が、上記現在位置(100)に対してオフセット(Δx)を追加することにより計算される、
上記項目に記載の方法。
(項目3)
−上記ルート(300、303)が、上記入力によって計算された異なるルートから選択される、
上記項目のいずれか1つに記載の方法。
(項目4)
−上記ルート(300、303)計算のための入力により、運転操作が許可されるか、または許可されないという点において、上記ルート(300、303)が変更される、
上記項目のいずれか1つに記載の方法。
(項目5)
−上記入力が、まさに1つの入力ステップまたはまさに2つの入力ステップによって生じる、
上記項目のいずれか1つに記載の方法。
(項目6)
−上記車両の移動の第1の方向(110)が上記現在の道路区分(150、151、153)内で決定され、
−上記入力が第2の方向(220、223)に関連し、
−上記第2の方向(220)と上記第1の方向(110)が異なっている、
上記項目のいずれか1つに記載の方法。
(項目7)
−上記車両の移動の第1の方向(110)が上記現在の道路区分(150、151、153)内で決定され、
−上記入力が第2の方向(220、223)に関連し、
−上記現在の道路区分(150)が一方通行路(153)ではない場合、上記第2の方向(220)が、上記第1の方向(110)の逆に設定され、上記現在の道路区分(153)が一方通行路(153)の場合は、上記第2の方向(203)が上記第1の方向(110)と一致する、
上記項目のいずれか1つに記載の方法。
(項目8)
−上記現在の道路区分(153)が一方通行路(153)である場合、上記目的地の上記決定が非アクティブ化されるか、または情報項目が出力される、
上記項目のいずれか1つに記載の方法。
(項目9)
−上記ユーザーによる入力のための入力装置(900)を備え、
−道路区分(150、150´、151、153)を有する保存された地図データをもつデータベース(950)に接続可能な演算論理装置(940)を備える、
ナビゲーションのためのシステムであって、
−上記演算論理装置(940)が、上記入力に基づいて、目的地(200、203)までのルート(300、303)を計算するように構成され、
−上記演算論理装置(940)が、現在の道路区分(150、151、153)および上記現在の道路区分(150、151、153)内の現在位置(100)を決定するように構成され、
−上記演算論理装置(940)が、上記現在の道路区分(150、153)内または上記現在の道路区分(150)の並行車線の別の道路区分(150´)内で、上記目的地(200、203)を決定するように構成され、
−上記演算論理装置(940)が、上記現在の道路区分(150、151、153)内で方向転換操作をすることなく、上記現在位置(100)から上記目的地(200、203)までの上記ルート(300、303)を計算するように構成されている、システム。
【0031】
(摘要)
保存された地図データとして道路区分(150、150´、151、153)を有するナビゲーションシステムを用いて、車両をナビゲートするための方法およびシステムであって、−現在の道路区分(150、151、153)およびその現在の道路区分(150、151、153)内の現在位置(100)を決定するステップと、−入力装置(900)を用いてユーザーによる入力を決定するステップと、−現在の道路区分(151、153)内または現在の道路区分(150)の並行車線の別の道路区分(150´)内で、目的地(200、203)を決定するステップであって、その決定が入力によって開始されるステップと、−現在の道路区分(150、151、153)内で方向転換操作をすることなく、現在位置(100)から目的地(200、203)までのルート(300、303)を計算するステップとを含む。
【図面の簡単な説明】
【0032】
【図1a】略図的な都市地図の詳細を示す図である。
【図1b】典型的実施形態の計算されたルートを含む、略図的な都市地図の詳細を示す図である。
【図2】典型的実施形態の目的地を計算するための、略図的な図である。
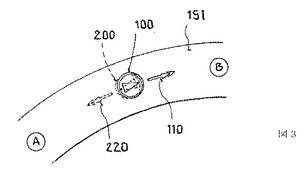
【図3】他の典型的実施形態の目的地を計算するための、略図的な図である。
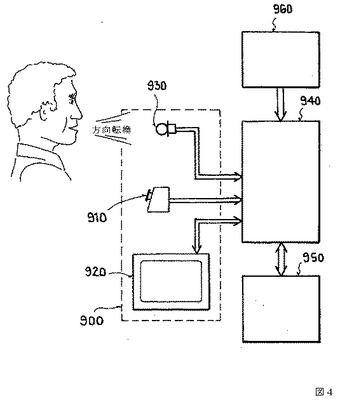
【図4】ナビゲーションンシステムの略図的ブロックサーキットダイアグラムを示す図である。
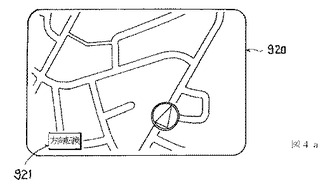
【図4a】ナビゲーションシステムの接触感受性ディスプレイの略図である。
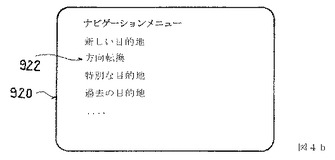
【図4b】ナビゲーションシステムの接触感受性ディスプレイの他の略図である。
【図4c】入力装置の略図である。
【図5】他の典型的実施形態の目的地およびルートを計算するための略図的な図である。
【発明を実施するための形態】
【0033】
運転者が、ナビゲーションシステムの助けなしに目的地に達しようとする場合、ナビゲーションシステムによって最初ルートは計算されない。それにもかかわらず、オン−モードでのナビゲーションンシステムは、現在地100、現在方向110および車両が現在位置している現在道路区分150を決定可能である。運転者は、方向転換したいと願う状況であることに気がつくことが可能である。例えば、運転者は、都市高速道路の出口を通過してしまった。例えば道路バリアが2つのレーンを分けてしまっている場合など、主要道路上での方向転換は、しばしば難しく、ナビゲーションシステムによる運転者の補助は好都合でありうる。
【0034】
このような型の状態は、道路地図詳細によって、図1aにて略図的に示されている。車両は現在地100に位置し、現在第1の方向110で運転されていてよい。第一運転方向110は、車両が交通ルールにしたがって位置するレーン内で許容されてよい。しかし、並行車線内の反対方向に交通が存在しうるため、現在旅行しているレーン自体内での方向転換は不可能でありうる。図1において、両方のレーンは、互いに、中心クラッシュバリア155によって分離されている。運転者がこのエリアの知識がない場合、正しい出口に達するまで再び長い迂回をする必要がありうる。手動で目的地を入力するために、運転者は、目的地を知り、停止し、目的地住所を入力する必要がある。
【0035】
ナビゲーションシステムは保存された地図データを含んでよい。図1aの1つの実施形態において、現在道路区分150と反対方向の道路区分150’、ジャンクション191、一方通行通り193および交通整理による制限194、195が保存されてよい。他の道路区分150’は、現在道路区分150の並行車線であってよく、そこで、現在地100が位置する。地図データにしたがって、ナビゲーションシステムは、交通整理「直進せよ」194が方向転換を許容しないことを知りうる。
【0036】
図1bの1つの実施形態において、ショートルート300が、ナビゲーションシステムによって計算されうる。図1bの典型的実施形態中のショートルート300は、現在第1の方向110から外れて第2の方向220で方向転換をさせうる。車両の現在地100は、サテライトシグナルに基づき連続的に決定されてよい。現在地100に関連した道路区分150が、地図データから、ナビゲーション装置によって決定されてよい。さらに、道路区分150内の車両の動きの第1の方向110が決定されてよい。
【0037】
ドライバーは、第2の方向220に関連する入力を行い得る。例えば、その入力は、ドライバーが入力「方向転換」によって最短ルート300の計算を開始できるように、「方向転換」として指定され得る。入力「方向転換」によって開始されると、目的地200が決定され得る。目的地200は、目標位置とも見なされ得る。目的地200は、現在位置100および入力「方向転換」に関連する第2の方向220のみに基づき得る。図1bの一実施形態は、ドライバーが、時間のかかる住所の手入力によって目的地200を定義する必要がないという優位性を達成するが、そのような住所の入力は、ドライバーの注意が交通からそらされるため、運転中は不都合かつ危険である。それにひきかえ、新しい便利な機能は、第2の運転方向220および最短ルート300を有する目的地200が、現在位置100および現在の第1運転方向110に対して、その場で計算され得るという点において、図1bの一実施形態によって達成され得る。最短ルートが計算されると、ルート誘導が自動的に開始され得る。ドライバーが最短ルート300から外れると、最短ルート300は再計算され得、それは、元の位置100から逆戻りの運転方向も含む;すなわち、目的地200が保持され得る。
【0038】
これに関して、自動目的地計算機能は、図1bに示す特別な場合に限定されない。ナビゲーションシステムによって、路上で方向転換する次の機会の検索が行われ得るか、または最短ルートが計算され得、それは、例えば、右折→左折の繰返し→任意でもう一度右折などの、ループで説明される。
【0039】
図2に概略的に示される一実施形態では、車両の現在位置100が点Aから点Bまでの幹線道路の道路区分150上にある場合、目的地200が決定され得る。その車両は、この場合、AからBに第1の方向110に進み得る。並行車線が示されており、それは、フェンス155によって、現在の道路区分150から分離されている。並行車線は、点A´から点B´まで延在する別の道路区分150´であり得る。並行する道路区分150、150´は両方とも、一方通行路であり得る。目的地200は、現在位置100から線を引く、点A´と点B´との間の別の道路区分150´との交差点で決定され得、それは、第1の方向110から、図2の一実施形態では、90°の角度で外れている。目的地200は、それにより、反対側の第2の運転方向220を有する隣接車線上に決定され得る。目的地200は、現在位置100を線102に沿って線分Δxだけシフトすることにより、計算的に決定され得る。次に、目的地200は、点B´と点A´との間で随意に計算的にシフトされ得る。目的地200は、道路区分150´に沿って、一定のオフセットによりシフトされ得る。
【0040】
目的地200の自動決定のための一実施形態を図3に概略的に示す。車両は、点Aから点Bへの現在の第1の運転方向110で、現在位置100にあり得る。図3の一実施形態では、目的地200は、現在位置100に等しい可能性がある。対照的に、目的地200に関連する第2の方向220は、現在位置100に関連する第1の方向110とは逆に設定され得る。この目的のため、第1の方向110は、例えば、逆にされ得、随意に、道路区分151内のコースに調整されて、第1の方向110および第2の方向220が必ずしも一直線にならないようにできる。
【0041】
目的地200および第2の方向220が決定されると、ルートが計算され得る。例えば、図3の例示的な実施形態では、道路区分151内の次に方向転換が可能な場所での方向転換操作のための操作命令が、画面上に、または聞き取り可能な音声命令として、出力され得る。多くの場合、交通量の多さのため、方向転換操作は不可能であり得るが、対向交通が実際は方向転換を許可しないためであり得る。図3の一実施形態では、ルートはドライバーの入力によって変更され得る。その入力は、ボタンを用いて行われ得る。ルートはその後、ボタンの別の作動によって変更され得る。これは、ドライバーが異なるルートを通ることができるように、繰返しても起こり得る。ルートは画面上に表示され得る。例えば、ルートは、入力によるルートの計算に対して、例えば、「方向転換してください」という運転操作が許可されるか、または許可されない点において、変更され得る。前述の例では、対向交通の多さのため、運転操作「方向転換」は許可されない可能性があり、ルートは、この運転操作なしで計算され得、すなわち、方向転換の代わりに、左折および/または右折が行われ得る。
【0042】
入力装置900、演算論理装置940、データベース950、および受信機960を備えたナビゲーションシステムを図4に概略的に示す。衛星信号が受信機によって受信され得、現在位置100がその衛星信号から決定され得る。図4の一実施形態の入力装置900は、3つの入力オプションを提供し得る。入力装置900は、ボタン910を有し得、それは、目的地200を自動的に計算する機能に関連付けられ得る。ボタン910の作動は、目的地200の計算に至る入力であり得る。入力装置900は、音声認識装置930を有し得、それは、フレーズを入力として認識し得、その入力は、目的地200を自動的に計算する機能に関連付けられ得る。図4の一実施形態では、フレーズ「方向転換」は、その機能に割り当てられ得る。
【0043】
図4の一実施形態の入力装置900は、タッチセンサー式の表面(タッチスクリーン920)を備えた画面920を有し得る。図4aの例示的な実施形態に示すように、タッチスクリーン920上に示されるアイコン921は、ウィジェットの形式であり得るが、目的地200の自動計算機能の入力に関連付けられ得る。タッチスクリーン920を使用した入力に対する別の選択肢を、図4bに概略的に示す。メインメニューでは、特別なメニュー項目922の選択による目的地200の自動計算機能が、ドライバーによって入力できる。
【0044】
図4aの一実施形態では、機能は、まさに1つの入力ステップで入力され得る。対照的に、図4bの例示的な実施形態では、機能は、まさに2つの入力ステップで、すなわち、メインメニュー「ナビゲーションメニュー」を起動し、メニュー項目922「方向転換」をタッチすることにより、入力され得る。この制御概念により、機能は単純で、ドライバーが素早く到達できる。ドライバーは、最大で2つの入力ステップの極めて短い入力により、交通状況から気がそらされないため、結果として、ドライバーに対する安全性が明らかに高められ、ストレスは明らかに減少される。さらに、交通規則に従った、方向転換の機会が、ドライバーに対して素早く作られる。この機能は、具体的には、次の方向転換可能な場所への最短ルートを提供するルートを生成し得る。そのルートは、したがって、次の左折可能な場所が遠すぎる場合には、脇道への右折を含むことがある。
【0045】
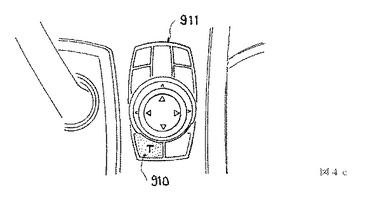
車両のセンターコンソールにある入力装置911の特別なボタン910の一例を図4cに概略的に示す。方向転換の機能は、ボタン上に記号または文字または文字列で視覚化され得る。自動目的地計算機能は、図4〜図4cに示す実施形態を用いて、単純な入力によってドライバーにより素早くかつ容易に達成できる。したがって、その入力は、目的地の住所を入力するよりも、はるかに素早く生じ得る。
【0046】
一実施形態を図5に概略的に示す。車両の現在位置100が一方通行路153の道路区分153内にある場合、方向転換は許可されない可能性がある。この場合、図4aの方向転換アイコン921または図4bの実施形態のメインメニュー内のメニュー項目922は、グレー表示にされ得る。ボタン910がそれにもかかわらず押されると、例えば、方向転換が許可されない旨の通知など、適切な指示が出力され得る。
【0047】
図5の一実施形態では、ドライバーは、駐車スペース154を検索し、駐車スペース154をちょうど通過したところかもしれず、そのため、現在位置100からは、方向転換して駐車スペース154に達することは不可能かも知れない。この場合、ドライバーは、一方通行路153を再度初めから通りたいと思う。それ故、ドライバーを一方通行路153の始まりに誘導する機能が提供され得る。例えば、「一方通行路の始まりに戻る」という機能に関連付けられた入力によって開始されると、目的地203が決定され得る。目的地203は、現在位置100および地図データに基づき、例えば、目的地203が一方通行路153の最初の交差点にあると推定することにより、決定され得る。この場合、第2の方向223は、地図データに基づき得、また、一方通行路の許可される方向のみに等しい可能性がある。目的地203を決定すると、現在位置100から目的地203へのルート303が、ルート誘導によりドライバーが駐車のために駐車スペース154に再度辿り着き得るよう、図5に示すように計算され得る。
【0048】
本発明は、図1a〜図5に示す実施形態の変形に限定されない。例えば、ルート計算に対して、異なる入力または他の条件を提供することが可能である。図1bの機能性は、自動車のナビゲーションシステムに対して、特に有利に使用できる。
【符号の説明】
【0049】
100 現在位置
102 オフセット、線
110 第1の方向、現在の方向
150, 150’, 151, 153 道路区分
154 駐車スペース
155 道路フェンス、中央分離帯
191 ジャンクション
193 一方通行路
194, 195 交通規則、交通標識
200, 203 目的地、目標位置
220, 223 第2の方向、目標方向
300, 303 ルート
310, 320 運転操作
900 入力装置
910 ボタン
911 コントロールパネル
920 タッチスクリーン、タッチセンサー式ディスプレイ
921 入力要素、ウィジェット、アイコン
922 メニュー項目
930 マイクロホン
940 演算論理装置、マイクロコントローラ
950 データベース、地図データ
960 受信機、GPS
A, B, A’, B’ 点、点
【技術分野】
【0001】
種々の実施形態が、ナビゲーションのための方法およびシステムに関する。
【背景技術】
【0002】
欧州特許第2 068 121 B1号明細書により、ルートガイダンス機能と、ユーザーへルートガイダンスを提供する方法を含む、ナビゲーションシステムが示されている。ナビゲーションシステムは、当該ナビゲーションシステム内にユーザーが入力した目的地へのルートガイダンスを実施するために、ユーザーの位置を検出する。ナビゲーションシステムは、旅行のためにユーザーが利用する車両の位置を検出し、そこで車両の位置は、典型的には、車両内のナビゲーションセンサー、GPS(グローバル・ポジショニング・システム)レシーバーのようなレシーバー、および検出された位置周辺のエリアに相当する地図データを用いることによって検出される。一般的に、ナビゲーションシステムは、それぞれ、ディスプレイスクリーン上に地図イメージを表示してよく、車両またはユーザーの現在地を示唆しているマークを表示してよい。ナビゲーションシステムは、ユーザーによって入力された開始点から目的地までのルートを計算する、ルートプロセシング装置によって、ルートを検索可能である。車両の現在地は、当該車両の移動によって変化するため、車両の位置マークは、ディスプレイスクリーン上でルートに沿って移動し、または車両に対して隣接する地図イメージは、ディスプレイスクリーン上、先に決定された位置で車両位置マークが存続する間でスクロールする。ユーザーが現在方向での移動から、他の方向への移動へ、操作を作成することが必要であるルート上の決定された操作点に車両が接近したとき、例えば、ユーザーが旅行している道を変更したとき、ルートプロセシング装置が、操作点を示唆する、例えば、ユーザーが旅行している道から去るべきであることを示唆するルートに関して、ユーザーに情報を提供する。例えば、ユーザーが、右側にある次の出口にて、旅行している高速道路から降りなければならないことを示唆するように、ディスプレイスクリーニングが操作点にてユーザーが取らなければならない方向を示唆する矢印を示す。あるいは、またはさらに、ナビゲーションシステムはまた、音声出力によってユーザーに操作点を示唆してよい。
【0003】
欧州特許第2 068 121 B1号明細書には、目的地への最初のルートを計算し、その最初のルートに関する情報をユーザーに提供するために適合したルートプロセシング装置を含む、ルートガイダンス機能を含むナビゲーションシステムが示されている。ナビゲーションシステムは、ユーザーが第一の方向での移動から、第二の方向での移動に、操作を実施することを要求される、少なくとも1つの操作点を決定する。ナビゲーションシステムには、少なくとも1つの操作点に関する情報を受領するために適合し、ユーザーに対して操作を実施することが目下要求されている減速値を計算するために適合した、減速計算装置が含まれる。減速計算装置は、減速値が、先に決定された参照値を超えているかどうかを決定するために適合する。ルートプロセシング装置は、第一ルートの対案としての、目的地への第二ルートを計算するために適合し、そこでは、第二ルートにしたがって、ユーザーは、操作点にて操作を実施することは要求されない。
【0004】
国際公開第2008/112335 A1号パンフレットより、予測最小燃料利用の推奨ルートを決定するための、器具および方法が知られている。例えば、ルート決定機は、使用されうる推定燃料量を計算することにおいて、推定速度に対して、区分のスピード制限プラス10マイル/時間を利用する。
【発明の概要】
【課題を解決するための手段】
【0005】
1つの様態にしたがって、ナビゲーションに対する方法への改善が、独立した請求項1の特徴を持つ方法を通して記述される。好都合な改善は、独立した請求項の主題であり、本明細書に含まれる。
【0006】
したがって、道路区分を持つ保存された地図データを含むナビゲーションシステムの方法による、車両のナビゲーションのための方法が提供される。本方法において、現在の道路区分と、現在の道路区分中の現在地が決定されうる。現在地は、レシーバーによって決定される、サテライトシグナル(GPS)に基づいてよい。現在地は、現在地に基づいて連続的に決定されてよい。現在の道路区分は現在地と関連してよい。現在道路区分は、現在地と、道路区分の先に定義された位置範囲を比較することによって、保存された地図データから決定されてよい。現在地と関連した現在道路区分は、局所的に保存された地図データから決定されてよい。これに関する道路区分は、地図データ中の2つの点の間で定義されてよい。
【0007】
本方法において、入力装置を利用してのユーザーによる入力が決定されてよい。ユーザーによる入力は、ボタンまたはタッチスクリーンによってマニュアルで、またはスピーチ認識によるボイスコマンドを介して行われてよい。
【0008】
本方法において、現在道路区分中、または現在道路区分の並行車線の他の道路区分中の目的地が決定されてよい。決定は、入力によって開始されてよい。決定は、さらなる入力なしに、自動的に起ってもよい。しかしながら、ユーザーによる目的地の住所の入力は必要ない。
【0009】
本方法において、現在地から目的地へのルートは、現在道路区分内の方向転換操作なしに計算されてよい。ルートガイダンスは、ルートが計算される後開始されてよい。ルートガイダンスは、即時に、すなわちユーザーからのさらなる入力なしに開始されてよい。
【0010】
1つの様態にしたがって、ナビゲーションシステムに対する改善が、独立した請求項9の特徴を持つシステムを通して記述される。種々の改善が本記述に含まれる。
【0011】
したがって、ナビゲーションに対するシステムが提供される。システムは、ユーザーによる入力のための入力装置を含んでよい。システムは、道路区分を含む保存された地図データを持つデータベースに連結可能な、計算ロジック装置を持ってよい。
【0012】
計算ロジック装置は、入力に基づく目的地までのルートを計算するために設定されてよい。
【0013】
計算ロジック装置は、現在道路区分と、現在道路区分中の現在地を決定するために設定されてよい。現在道路区分は、現在地に関連してよい。
【0014】
計算ロジック装置は、現在道路区分中、または現在道路区分の並行車線の他の道路区分中の目的地を決定するために設定されてよい。目的地の決定は、入力によって開始されてよい。
【0015】
計算ロジック装置は、現在地から目的地までのルートを、現在道路区分内の方向転換操作なしに、計算するために設定されてよい。
【0016】
計算ロジック装置は、ルートガイダンスを開始するために設定されてよい。ルートガイダンスは、操作指示の方法によって、例えばディスプレイ装置上にルートを示すことによって実施されてよい。
【0017】
本明細書以下で記述する改善は、ナビゲーションのためのシステムおよび方法両方に関する。
【0018】
1つの実施形態にしたがって、目的地は、現在地にオフセットを加えることによって計算されてよい。1つの実施形態にしたがって、オフセットを、それぞれ運転方向とは逆、または並行車線に面して加えてよい。
【0019】
方向転換操作の代わりに、左ターンおよび右ターンのみが許容されてよい。結果として、運転者にとって、例えば非常に交通量が多いために、方向転換操作が不可能である場合、運転方向のもっとも迅速な逆転が可能になる。
【0020】
1つの実施形態において、ルートは、入力によって変更されてよい。1つの実施形態において、ルートは、入力によって、計算された異なるルートより選択されてよい。いくつかの計算されたルートの1つが選択されてよい。異なるルート間の選択は、連続ボタン作動によって行われうる。
【0021】
1つの実施形態において、ルートは、運転操作が、入力によるルートの計算に対して許容されるか、またはされないように変更されてよい。運転操作は、「方向転換」であってよい。入力の第一作動において、方向転換が許容されてよく、一方で、入力の第二作動において、方向転換が許容されなくてよく、それによって計算された第一ルートが、第一作動と関連し、計算された第二ルートが第二作動に関連してよい。
【0022】
1つの実施形態において、入力は、多数の、正確な1つの入力ステップまたは正確な2つの入力ステップによって発生してよい。非常にわずかな入力ステップのために、交通状況からの運転者の注意力散漫が最小まで減少する。入力は、単一ボタン入力または単一ボイスコマンドによって達成されてよい。あるいは、入力は、第一入力段階としてメインメニューを開くこと、および第二入力段階として機能を選択することによって達成されてよく、それによってメインメニューの機能が即時に実施されなければならない。
【0023】
1つの実施形態において、現在道路区分内での車両の動きの第1の方向が決定されてよい。第1の方向は、地図データ中ポイントAからポイントBまでの方向として、または主要方向として定義されてよい。方向は、多数の決定された位置に基づいて特定化されてよい。
【0024】
1つの実施形態において、入力は、第2の方向と関連してよい。第2の方向は、第1の方向に基づいて決定されてよく、地図データに基づいて決定されてよい。第2の方向は、地図データ中の2つのポイントA、B間で、または主要方向として定義されてよい。
【0025】
1つの実施形態において、第2の方向と第1の方向は異なってよい。第1の方向と第2の方向は、鈍角において互いに異なりうる。目的地は、現在地と第2の方向両方に基づいて決定されてよい。
【0026】
1つの実施形態において、計算ロジック装置は、第1の方向に基づき、任意に地図データに基づく第2の方向を決定するために設定されてよい。第2の方向は、道路区分が一方通行通りでない場合、第1の方向と反対に設定されてよい。
【0027】
1つの実施形態において、現在道路区分内の車両の動きの第1の方向が決定されてよい。第2の方向が、入力に基づいて、道路区分が一方通行通りでない場合、第1の方向と反対に設定されてよい。第2の方向は、道路区分が一方通行通りである場合に、第1の方向に相当してよい。
【0028】
1つの実施形態において、現在道路区分が一方通行通りの場合、目的地の決定が 無効化されてよく、または情報アイテムが出力である。出力は、通りが一方通行である場合に、可聴警告信号かまたは可聴説明文であり、それによって通りで方向転換することが不可能である。出力はまた、例えば点滅方向矢印にように視覚可能でもあり得る。
【0029】
すべての実施形態は、互いに組み合わせ可能である。いくつかの可能性ある組み合わせが、図の記述にて説明される。しかしながら、これらの描写された可能性ある改善異形の組み合わせは、決定的なものではない。
【0030】
例えば、本願発明は以下の項目を提供する。
(項目1)
道路区分(150、150´、151、153)を有する保存された地図データを備えたナビゲーションシステムを用いて、車両をナビゲートする方法であって、
−現在の道路区分(150、151、153)および上記現在の道路区分(150、151、153)内の上記車両の現在位置(100)を決定するステップと、
−入力装置(900)を用いてユーザーによる入力を決定するステップと、
−上記現在の道路区分(151、153)内、または上記現在の道路区分(150)の並行車線の別の道路区分(150´)内で、目的地(200、203)を決定するステップであって、上記決定が上記入力によって開始されるステップと、
−上記現在位置(100)から上記目的地(200、203)へのルート(300、303)を、上記現在の道路区分(150、151、153)内で方向転換操作をすることなく、計算するステップとを含む方法。
(項目2)
−上記目的地(200、203)が、上記現在位置(100)に対してオフセット(Δx)を追加することにより計算される、
上記項目に記載の方法。
(項目3)
−上記ルート(300、303)が、上記入力によって計算された異なるルートから選択される、
上記項目のいずれか1つに記載の方法。
(項目4)
−上記ルート(300、303)計算のための入力により、運転操作が許可されるか、または許可されないという点において、上記ルート(300、303)が変更される、
上記項目のいずれか1つに記載の方法。
(項目5)
−上記入力が、まさに1つの入力ステップまたはまさに2つの入力ステップによって生じる、
上記項目のいずれか1つに記載の方法。
(項目6)
−上記車両の移動の第1の方向(110)が上記現在の道路区分(150、151、153)内で決定され、
−上記入力が第2の方向(220、223)に関連し、
−上記第2の方向(220)と上記第1の方向(110)が異なっている、
上記項目のいずれか1つに記載の方法。
(項目7)
−上記車両の移動の第1の方向(110)が上記現在の道路区分(150、151、153)内で決定され、
−上記入力が第2の方向(220、223)に関連し、
−上記現在の道路区分(150)が一方通行路(153)ではない場合、上記第2の方向(220)が、上記第1の方向(110)の逆に設定され、上記現在の道路区分(153)が一方通行路(153)の場合は、上記第2の方向(203)が上記第1の方向(110)と一致する、
上記項目のいずれか1つに記載の方法。
(項目8)
−上記現在の道路区分(153)が一方通行路(153)である場合、上記目的地の上記決定が非アクティブ化されるか、または情報項目が出力される、
上記項目のいずれか1つに記載の方法。
(項目9)
−上記ユーザーによる入力のための入力装置(900)を備え、
−道路区分(150、150´、151、153)を有する保存された地図データをもつデータベース(950)に接続可能な演算論理装置(940)を備える、
ナビゲーションのためのシステムであって、
−上記演算論理装置(940)が、上記入力に基づいて、目的地(200、203)までのルート(300、303)を計算するように構成され、
−上記演算論理装置(940)が、現在の道路区分(150、151、153)および上記現在の道路区分(150、151、153)内の現在位置(100)を決定するように構成され、
−上記演算論理装置(940)が、上記現在の道路区分(150、153)内または上記現在の道路区分(150)の並行車線の別の道路区分(150´)内で、上記目的地(200、203)を決定するように構成され、
−上記演算論理装置(940)が、上記現在の道路区分(150、151、153)内で方向転換操作をすることなく、上記現在位置(100)から上記目的地(200、203)までの上記ルート(300、303)を計算するように構成されている、システム。
【0031】
(摘要)
保存された地図データとして道路区分(150、150´、151、153)を有するナビゲーションシステムを用いて、車両をナビゲートするための方法およびシステムであって、−現在の道路区分(150、151、153)およびその現在の道路区分(150、151、153)内の現在位置(100)を決定するステップと、−入力装置(900)を用いてユーザーによる入力を決定するステップと、−現在の道路区分(151、153)内または現在の道路区分(150)の並行車線の別の道路区分(150´)内で、目的地(200、203)を決定するステップであって、その決定が入力によって開始されるステップと、−現在の道路区分(150、151、153)内で方向転換操作をすることなく、現在位置(100)から目的地(200、203)までのルート(300、303)を計算するステップとを含む。
【図面の簡単な説明】
【0032】
【図1a】略図的な都市地図の詳細を示す図である。
【図1b】典型的実施形態の計算されたルートを含む、略図的な都市地図の詳細を示す図である。
【図2】典型的実施形態の目的地を計算するための、略図的な図である。
【図3】他の典型的実施形態の目的地を計算するための、略図的な図である。
【図4】ナビゲーションンシステムの略図的ブロックサーキットダイアグラムを示す図である。
【図4a】ナビゲーションシステムの接触感受性ディスプレイの略図である。
【図4b】ナビゲーションシステムの接触感受性ディスプレイの他の略図である。
【図4c】入力装置の略図である。
【図5】他の典型的実施形態の目的地およびルートを計算するための略図的な図である。
【発明を実施するための形態】
【0033】
運転者が、ナビゲーションシステムの助けなしに目的地に達しようとする場合、ナビゲーションシステムによって最初ルートは計算されない。それにもかかわらず、オン−モードでのナビゲーションンシステムは、現在地100、現在方向110および車両が現在位置している現在道路区分150を決定可能である。運転者は、方向転換したいと願う状況であることに気がつくことが可能である。例えば、運転者は、都市高速道路の出口を通過してしまった。例えば道路バリアが2つのレーンを分けてしまっている場合など、主要道路上での方向転換は、しばしば難しく、ナビゲーションシステムによる運転者の補助は好都合でありうる。
【0034】
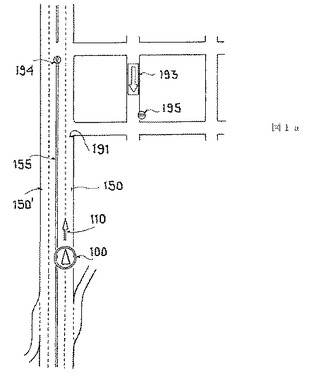
このような型の状態は、道路地図詳細によって、図1aにて略図的に示されている。車両は現在地100に位置し、現在第1の方向110で運転されていてよい。第一運転方向110は、車両が交通ルールにしたがって位置するレーン内で許容されてよい。しかし、並行車線内の反対方向に交通が存在しうるため、現在旅行しているレーン自体内での方向転換は不可能でありうる。図1において、両方のレーンは、互いに、中心クラッシュバリア155によって分離されている。運転者がこのエリアの知識がない場合、正しい出口に達するまで再び長い迂回をする必要がありうる。手動で目的地を入力するために、運転者は、目的地を知り、停止し、目的地住所を入力する必要がある。
【0035】
ナビゲーションシステムは保存された地図データを含んでよい。図1aの1つの実施形態において、現在道路区分150と反対方向の道路区分150’、ジャンクション191、一方通行通り193および交通整理による制限194、195が保存されてよい。他の道路区分150’は、現在道路区分150の並行車線であってよく、そこで、現在地100が位置する。地図データにしたがって、ナビゲーションシステムは、交通整理「直進せよ」194が方向転換を許容しないことを知りうる。
【0036】
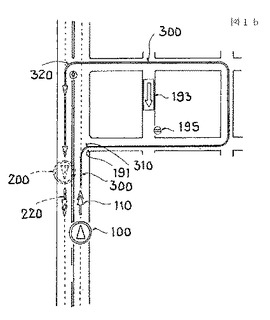
図1bの1つの実施形態において、ショートルート300が、ナビゲーションシステムによって計算されうる。図1bの典型的実施形態中のショートルート300は、現在第1の方向110から外れて第2の方向220で方向転換をさせうる。車両の現在地100は、サテライトシグナルに基づき連続的に決定されてよい。現在地100に関連した道路区分150が、地図データから、ナビゲーション装置によって決定されてよい。さらに、道路区分150内の車両の動きの第1の方向110が決定されてよい。
【0037】
ドライバーは、第2の方向220に関連する入力を行い得る。例えば、その入力は、ドライバーが入力「方向転換」によって最短ルート300の計算を開始できるように、「方向転換」として指定され得る。入力「方向転換」によって開始されると、目的地200が決定され得る。目的地200は、目標位置とも見なされ得る。目的地200は、現在位置100および入力「方向転換」に関連する第2の方向220のみに基づき得る。図1bの一実施形態は、ドライバーが、時間のかかる住所の手入力によって目的地200を定義する必要がないという優位性を達成するが、そのような住所の入力は、ドライバーの注意が交通からそらされるため、運転中は不都合かつ危険である。それにひきかえ、新しい便利な機能は、第2の運転方向220および最短ルート300を有する目的地200が、現在位置100および現在の第1運転方向110に対して、その場で計算され得るという点において、図1bの一実施形態によって達成され得る。最短ルートが計算されると、ルート誘導が自動的に開始され得る。ドライバーが最短ルート300から外れると、最短ルート300は再計算され得、それは、元の位置100から逆戻りの運転方向も含む;すなわち、目的地200が保持され得る。
【0038】
これに関して、自動目的地計算機能は、図1bに示す特別な場合に限定されない。ナビゲーションシステムによって、路上で方向転換する次の機会の検索が行われ得るか、または最短ルートが計算され得、それは、例えば、右折→左折の繰返し→任意でもう一度右折などの、ループで説明される。
【0039】
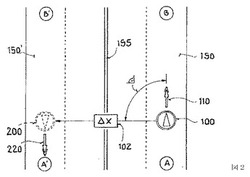
図2に概略的に示される一実施形態では、車両の現在位置100が点Aから点Bまでの幹線道路の道路区分150上にある場合、目的地200が決定され得る。その車両は、この場合、AからBに第1の方向110に進み得る。並行車線が示されており、それは、フェンス155によって、現在の道路区分150から分離されている。並行車線は、点A´から点B´まで延在する別の道路区分150´であり得る。並行する道路区分150、150´は両方とも、一方通行路であり得る。目的地200は、現在位置100から線を引く、点A´と点B´との間の別の道路区分150´との交差点で決定され得、それは、第1の方向110から、図2の一実施形態では、90°の角度で外れている。目的地200は、それにより、反対側の第2の運転方向220を有する隣接車線上に決定され得る。目的地200は、現在位置100を線102に沿って線分Δxだけシフトすることにより、計算的に決定され得る。次に、目的地200は、点B´と点A´との間で随意に計算的にシフトされ得る。目的地200は、道路区分150´に沿って、一定のオフセットによりシフトされ得る。
【0040】
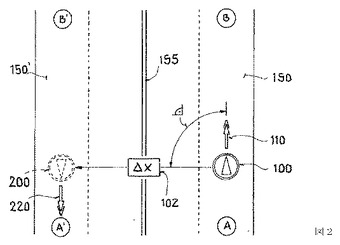
目的地200の自動決定のための一実施形態を図3に概略的に示す。車両は、点Aから点Bへの現在の第1の運転方向110で、現在位置100にあり得る。図3の一実施形態では、目的地200は、現在位置100に等しい可能性がある。対照的に、目的地200に関連する第2の方向220は、現在位置100に関連する第1の方向110とは逆に設定され得る。この目的のため、第1の方向110は、例えば、逆にされ得、随意に、道路区分151内のコースに調整されて、第1の方向110および第2の方向220が必ずしも一直線にならないようにできる。
【0041】
目的地200および第2の方向220が決定されると、ルートが計算され得る。例えば、図3の例示的な実施形態では、道路区分151内の次に方向転換が可能な場所での方向転換操作のための操作命令が、画面上に、または聞き取り可能な音声命令として、出力され得る。多くの場合、交通量の多さのため、方向転換操作は不可能であり得るが、対向交通が実際は方向転換を許可しないためであり得る。図3の一実施形態では、ルートはドライバーの入力によって変更され得る。その入力は、ボタンを用いて行われ得る。ルートはその後、ボタンの別の作動によって変更され得る。これは、ドライバーが異なるルートを通ることができるように、繰返しても起こり得る。ルートは画面上に表示され得る。例えば、ルートは、入力によるルートの計算に対して、例えば、「方向転換してください」という運転操作が許可されるか、または許可されない点において、変更され得る。前述の例では、対向交通の多さのため、運転操作「方向転換」は許可されない可能性があり、ルートは、この運転操作なしで計算され得、すなわち、方向転換の代わりに、左折および/または右折が行われ得る。
【0042】
入力装置900、演算論理装置940、データベース950、および受信機960を備えたナビゲーションシステムを図4に概略的に示す。衛星信号が受信機によって受信され得、現在位置100がその衛星信号から決定され得る。図4の一実施形態の入力装置900は、3つの入力オプションを提供し得る。入力装置900は、ボタン910を有し得、それは、目的地200を自動的に計算する機能に関連付けられ得る。ボタン910の作動は、目的地200の計算に至る入力であり得る。入力装置900は、音声認識装置930を有し得、それは、フレーズを入力として認識し得、その入力は、目的地200を自動的に計算する機能に関連付けられ得る。図4の一実施形態では、フレーズ「方向転換」は、その機能に割り当てられ得る。
【0043】
図4の一実施形態の入力装置900は、タッチセンサー式の表面(タッチスクリーン920)を備えた画面920を有し得る。図4aの例示的な実施形態に示すように、タッチスクリーン920上に示されるアイコン921は、ウィジェットの形式であり得るが、目的地200の自動計算機能の入力に関連付けられ得る。タッチスクリーン920を使用した入力に対する別の選択肢を、図4bに概略的に示す。メインメニューでは、特別なメニュー項目922の選択による目的地200の自動計算機能が、ドライバーによって入力できる。
【0044】
図4aの一実施形態では、機能は、まさに1つの入力ステップで入力され得る。対照的に、図4bの例示的な実施形態では、機能は、まさに2つの入力ステップで、すなわち、メインメニュー「ナビゲーションメニュー」を起動し、メニュー項目922「方向転換」をタッチすることにより、入力され得る。この制御概念により、機能は単純で、ドライバーが素早く到達できる。ドライバーは、最大で2つの入力ステップの極めて短い入力により、交通状況から気がそらされないため、結果として、ドライバーに対する安全性が明らかに高められ、ストレスは明らかに減少される。さらに、交通規則に従った、方向転換の機会が、ドライバーに対して素早く作られる。この機能は、具体的には、次の方向転換可能な場所への最短ルートを提供するルートを生成し得る。そのルートは、したがって、次の左折可能な場所が遠すぎる場合には、脇道への右折を含むことがある。
【0045】
車両のセンターコンソールにある入力装置911の特別なボタン910の一例を図4cに概略的に示す。方向転換の機能は、ボタン上に記号または文字または文字列で視覚化され得る。自動目的地計算機能は、図4〜図4cに示す実施形態を用いて、単純な入力によってドライバーにより素早くかつ容易に達成できる。したがって、その入力は、目的地の住所を入力するよりも、はるかに素早く生じ得る。
【0046】
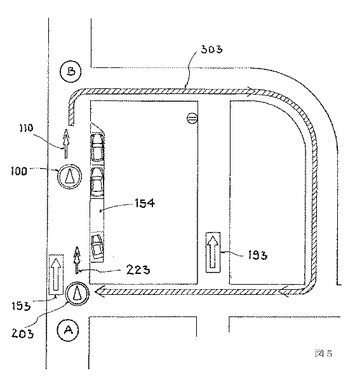
一実施形態を図5に概略的に示す。車両の現在位置100が一方通行路153の道路区分153内にある場合、方向転換は許可されない可能性がある。この場合、図4aの方向転換アイコン921または図4bの実施形態のメインメニュー内のメニュー項目922は、グレー表示にされ得る。ボタン910がそれにもかかわらず押されると、例えば、方向転換が許可されない旨の通知など、適切な指示が出力され得る。
【0047】
図5の一実施形態では、ドライバーは、駐車スペース154を検索し、駐車スペース154をちょうど通過したところかもしれず、そのため、現在位置100からは、方向転換して駐車スペース154に達することは不可能かも知れない。この場合、ドライバーは、一方通行路153を再度初めから通りたいと思う。それ故、ドライバーを一方通行路153の始まりに誘導する機能が提供され得る。例えば、「一方通行路の始まりに戻る」という機能に関連付けられた入力によって開始されると、目的地203が決定され得る。目的地203は、現在位置100および地図データに基づき、例えば、目的地203が一方通行路153の最初の交差点にあると推定することにより、決定され得る。この場合、第2の方向223は、地図データに基づき得、また、一方通行路の許可される方向のみに等しい可能性がある。目的地203を決定すると、現在位置100から目的地203へのルート303が、ルート誘導によりドライバーが駐車のために駐車スペース154に再度辿り着き得るよう、図5に示すように計算され得る。
【0048】
本発明は、図1a〜図5に示す実施形態の変形に限定されない。例えば、ルート計算に対して、異なる入力または他の条件を提供することが可能である。図1bの機能性は、自動車のナビゲーションシステムに対して、特に有利に使用できる。
【符号の説明】
【0049】
100 現在位置
102 オフセット、線
110 第1の方向、現在の方向
150, 150’, 151, 153 道路区分
154 駐車スペース
155 道路フェンス、中央分離帯
191 ジャンクション
193 一方通行路
194, 195 交通規則、交通標識
200, 203 目的地、目標位置
220, 223 第2の方向、目標方向
300, 303 ルート
310, 320 運転操作
900 入力装置
910 ボタン
911 コントロールパネル
920 タッチスクリーン、タッチセンサー式ディスプレイ
921 入力要素、ウィジェット、アイコン
922 メニュー項目
930 マイクロホン
940 演算論理装置、マイクロコントローラ
950 データベース、地図データ
960 受信機、GPS
A, B, A’, B’ 点、点
【特許請求の範囲】
【請求項1】
道路区分(150、150´、151、153)を有する保存された地図データを備えたナビゲーションシステムを用いて、車両をナビゲートする方法であって、
−現在の道路区分(150、151、153)および前記現在の道路区分(150、151、153)内の前記車両の現在位置(100)を決定するステップと、
−入力装置(900)を用いてユーザーによる入力を決定するステップと、
−前記現在の道路区分(151、153)内、または前記現在の道路区分(150)の並行車線の別の道路区分(150´)内で、目的地(200、203)を決定するステップであって、前記決定が前記入力によって開始されるステップと、
−前記現在位置(100)から前記目的地(200、203)へのルート(300、303)を、前記現在の道路区分(150、151、153)内で方向転換操作をすることなく、計算するステップとを含む方法。
【請求項2】
−前記目的地(200、203)が、前記現在位置(100)に対してオフセット(Δx)を追加することにより計算される、
請求項1に記載の方法。
【請求項3】
−前記ルート(300、303)が、前記入力によって計算された異なるルートから選択される、
先行する請求項のいずれか1つに記載の方法。
【請求項4】
−前記ルート(300、303)計算のための入力により、運転操作が許可されるか、または許可されないという点において、前記ルート(300、303)が変更される、
先行する請求項のいずれか1つに記載の方法。
【請求項5】
−前記入力が、まさに1つの入力ステップまたはまさに2つの入力ステップによって生じる、
先行する請求項のいずれか1つに記載の方法。
【請求項6】
−前記車両の移動の第1の方向(110)が前記現在の道路区分(150、151、153)内で決定され、
−前記入力が第2の方向(220、223)に関連し、
−前記第2の方向(220)と前記第1の方向(110)が異なっている、
先行する請求項のいずれか1つに記載の方法。
【請求項7】
−前記車両の移動の第1の方向(110)が前記現在の道路区分(150、151、153)内で決定され、
−前記入力が第2の方向(220、223)に関連し、
−前記現在の道路区分(150)が一方通行路(153)ではない場合、前記第2の方向(220)が、前記第1の方向(110)の逆に設定され、前記現在の道路区分(153)が一方通行路(153)の場合は、前記第2の方向(203)が前記第1の方向(110)と一致する、
請求項1〜請求項5のいずれか1つに記載の方法。
【請求項8】
−前記現在の道路区分(153)が一方通行路(153)である場合、前記目的地の前記決定が非アクティブ化されるか、または情報項目が出力される、
請求項1〜請求項5のいずれか1つに記載の方法。
【請求項9】
−前記ユーザーによる入力のための入力装置(900)を備え、
−道路区分(150、150´、151、153)を有する保存された地図データをもつデータベース(950)に接続可能な演算論理装置(940)を備える、
ナビゲーションのためのシステムであって、
−前記演算論理装置(940)が、前記入力に基づいて、目的地(200、203)までのルート(300、303)を計算するように構成され、
−前記演算論理装置(940)が、現在の道路区分(150、151、153)および前記現在の道路区分(150、151、153)内の現在位置(100)を決定するように構成され、
−前記演算論理装置(940)が、前記現在の道路区分(150、153)内または前記現在の道路区分(150)の並行車線の別の道路区分(150´)内で、前記目的地(200、203)を決定するように構成され、
−前記演算論理装置(940)が、前記現在の道路区分(150、151、153)内で方向転換操作をすることなく、前記現在位置(100)から前記目的地(200、203)までの前記ルート(300、303)を計算するように構成されている、システム。
【請求項1】
道路区分(150、150´、151、153)を有する保存された地図データを備えたナビゲーションシステムを用いて、車両をナビゲートする方法であって、
−現在の道路区分(150、151、153)および前記現在の道路区分(150、151、153)内の前記車両の現在位置(100)を決定するステップと、
−入力装置(900)を用いてユーザーによる入力を決定するステップと、
−前記現在の道路区分(151、153)内、または前記現在の道路区分(150)の並行車線の別の道路区分(150´)内で、目的地(200、203)を決定するステップであって、前記決定が前記入力によって開始されるステップと、
−前記現在位置(100)から前記目的地(200、203)へのルート(300、303)を、前記現在の道路区分(150、151、153)内で方向転換操作をすることなく、計算するステップとを含む方法。
【請求項2】
−前記目的地(200、203)が、前記現在位置(100)に対してオフセット(Δx)を追加することにより計算される、
請求項1に記載の方法。
【請求項3】
−前記ルート(300、303)が、前記入力によって計算された異なるルートから選択される、
先行する請求項のいずれか1つに記載の方法。
【請求項4】
−前記ルート(300、303)計算のための入力により、運転操作が許可されるか、または許可されないという点において、前記ルート(300、303)が変更される、
先行する請求項のいずれか1つに記載の方法。
【請求項5】
−前記入力が、まさに1つの入力ステップまたはまさに2つの入力ステップによって生じる、
先行する請求項のいずれか1つに記載の方法。
【請求項6】
−前記車両の移動の第1の方向(110)が前記現在の道路区分(150、151、153)内で決定され、
−前記入力が第2の方向(220、223)に関連し、
−前記第2の方向(220)と前記第1の方向(110)が異なっている、
先行する請求項のいずれか1つに記載の方法。
【請求項7】
−前記車両の移動の第1の方向(110)が前記現在の道路区分(150、151、153)内で決定され、
−前記入力が第2の方向(220、223)に関連し、
−前記現在の道路区分(150)が一方通行路(153)ではない場合、前記第2の方向(220)が、前記第1の方向(110)の逆に設定され、前記現在の道路区分(153)が一方通行路(153)の場合は、前記第2の方向(203)が前記第1の方向(110)と一致する、
請求項1〜請求項5のいずれか1つに記載の方法。
【請求項8】
−前記現在の道路区分(153)が一方通行路(153)である場合、前記目的地の前記決定が非アクティブ化されるか、または情報項目が出力される、
請求項1〜請求項5のいずれか1つに記載の方法。
【請求項9】
−前記ユーザーによる入力のための入力装置(900)を備え、
−道路区分(150、150´、151、153)を有する保存された地図データをもつデータベース(950)に接続可能な演算論理装置(940)を備える、
ナビゲーションのためのシステムであって、
−前記演算論理装置(940)が、前記入力に基づいて、目的地(200、203)までのルート(300、303)を計算するように構成され、
−前記演算論理装置(940)が、現在の道路区分(150、151、153)および前記現在の道路区分(150、151、153)内の現在位置(100)を決定するように構成され、
−前記演算論理装置(940)が、前記現在の道路区分(150、153)内または前記現在の道路区分(150)の並行車線の別の道路区分(150´)内で、前記目的地(200、203)を決定するように構成され、
−前記演算論理装置(940)が、前記現在の道路区分(150、151、153)内で方向転換操作をすることなく、前記現在位置(100)から前記目的地(200、203)までの前記ルート(300、303)を計算するように構成されている、システム。
【図1a】


【図1b】
【図2】
【図3】
【図4】
【図4a】
【図4b】
【図4c】
【図5】
【図1b】
【図2】
【図3】
【図4】
【図4a】
【図4b】
【図4c】
【図5】
【公開番号】特開2013−40933(P2013−40933A)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−178071(P2012−178071)
【出願日】平成24年8月10日(2012.8.10)
【出願人】(504147933)ハーマン ベッカー オートモーティブ システムズ ゲーエムベーハー (165)
【Fターム(参考)】
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2012−178071(P2012−178071)
【出願日】平成24年8月10日(2012.8.10)
【出願人】(504147933)ハーマン ベッカー オートモーティブ システムズ ゲーエムベーハー (165)
【Fターム(参考)】
[ Back to top ]