
ナビゲーションシステム、および、そのナビゲーションシステムに用いる係数決定プログラム
【課題】短期的に変化する状況によってユーザの好みが変化しても、ユーザの好みに合った経路が探索されるナビゲーションシステムを提供する。
【解決手段】重み係数が乗じられる複数種類のコストパラメータの総コストを算出するコスト評価関数を用いて出発地から目的地までの最良の経路を探索することができるナビゲーションシステムにおいて、コスト評価関数の重み係数を、コストテーブル集合(コスト評価関数に含まれる複数の重み係数を一組とするコストテーブルが複数含まれる集合)から選択する際に用いるベイジアンネットモデル20に、状況情報である平日か休日かの2状態をとる平日/休日ノード42、複数の時間帯を有する時間帯ノード44を含ませる。
【解決手段】重み係数が乗じられる複数種類のコストパラメータの総コストを算出するコスト評価関数を用いて出発地から目的地までの最良の経路を探索することができるナビゲーションシステムにおいて、コスト評価関数の重み係数を、コストテーブル集合(コスト評価関数に含まれる複数の重み係数を一組とするコストテーブルが複数含まれる集合)から選択する際に用いるベイジアンネットモデル20に、状況情報である平日か休日かの2状態をとる平日/休日ノード42、複数の時間帯を有する時間帯ノード44を含ませる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーションシステム、および、そのナビゲーションシステムに用いる係数決定プログラムに関し、特に、出発地から目的地までの経路を探索する機能を備えたナビゲーションシステムおよびプログラムに関する。
【背景技術】
【0002】
カーナビゲーションシステムに代表されるナビゲーションシステムは、出発地から目的地までの経路を探索する機能を備えていることが一般的である。経路の探索を行う方法としては、重み係数が乗じられる複数種類のコストパラメータの総コストが最小になるような経路を、ダイクストラ法などによって決定する方法がある(たとえば、特許文献1)。
【0003】
特許文献1は、カーナビゲーションシステムの例であり、コストパラメータとして、距離、平均走行時間、道幅などを用いている。それら複数種類のコストパラメータに乗じられる重み係数を変化させると、経路探索において重視するコストパラメータを変更できる。
【0004】
特許文献1の装置は、評価関数の数値が最小となる経路から順に複数の経路を探索し、探索した複数の経路を運転者に提示するようにしている。そして、運転者が選択した経路が、評価関数の数値が最小のものでない場合には、パラメータの重み係数を変更(学習)するようにしている。すなわち、運転者が選択した経路における各パラメータのコスト値を、他の経路における各パラメータのコスト値と比較し、運転者が選択した経路においてコスト値が大きくなっているパラメータの重み係数を小さくするようにしている。このようにすることにより、学習を繰り返すうちに、距離を重視する、時間を重視する、走りやすさを重視するなどの運転者の好みが反映された経路が優先的に探索されるようになる。
【特許文献1】特開平5−224601号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
特許文献1のものは、学習を繰り返すことによって、運転者の好みが反映された経路が探索されるようになるが、運転者の好みは常に同じとは限らず、たとえば、平日は目的地に早く着きたいが、休日は多少遅くなっても良いので、走りやすい道を好むなどということもある。また、時間帯によって好みが変わることも考えられる。たとえば、仕事帰りの夕方は走りやすい道を走りたいが、それ以外の時間帯は、走行時間が短いほうがよいなどということが考えられる。
【0006】
このように、運転者の好みは、平日か休日か、あるいは、時間帯など、短期的に変化する状況によって変わることもあるのだが、特許文献1の装置の場合には、運転者の好みが変化することは考慮されておらず、その結果、運転者の好みが反映された経路が常に探索されるとは限らないという問題がある。
【0007】
なお、この問題は、車用のナビゲーションシステム(すなわち、カーナビゲーションシステム)に限らず、携帯型のナビゲーションシステムについても、同様に生じる可能性がある。
【0008】
本発明は、上記問題点に鑑みて成されたものであり、本発明の目的とするところは、短期的に変化する状況によってユーザの好みが変化しても、ユーザの好みに合った経路が探索されるナビゲーションシステム、および、そのナビゲーションシステムに使用する評価関数の重み係数を決定するプログラムを提供することにある。
【課題を解決するための手段】
【0009】
その目的を達成するための請求項1記載の発明は、重み係数が乗じられる複数種類のコストパラメータの総コストを算出するコスト評価関数を用いて出発地から目的地までの経路を探索する形式のナビゲーションシステムであって、短期的に変化する予め設定された種類の状況情報に基づいて前記コストパラメータの重み係数が定まる係数決定関係を記憶した記憶装置と、その記憶装置に記憶された係数決定関係および実際に検出された前記状況情報に基づいて、前記コストパラメータの重み係数を決定する重み係数決定手段とを、含むことを特徴とする。
【0010】
この請求項1記載の発明によれば、短期的に変化する状況情報に基づいて、コスト評価関数のコストパラメータに乗じられる重み係数が決定されることから、その状況情報の変化によってユーザの好みが変化するとしても、ユーザの好みに合った経路が探索される。
【0011】
ここで、請求項2記載のように、前記記憶装置に記憶された係数決定関係は、前記状況情報に加えて、ユーザの不変的な情報であるユーザ情報に基づいて、前記重み係数が定まるようになっており、前記重み係数決定手段は、その係数決定関係、実際に検出された前記状況情報、および、実際のユーザの前記ユーザ情報に基づいて、前記コストパラメータの重み係数を決定するようになっていることが好ましい。
【0012】
このように、状況情報に加えてユーザ情報をも用いてコストパラメータの重み係数を決定するようにすれば、状況情報のみに基づいて重み係数を決定する場合よりも、コストパラメータの重み付けがよりユーザの好みを反映したものとなることから、よりユーザの好みを反映した経路を探索できるようになる。
【0013】
また、前記係数決定関係は、請求項3のように、平日と休日との2つの状態をとる観測変数を有していることが好ましい。このようにすれば、平日か休日かが反映されて重み係数が決定されるようになるので、平日か休日かによって変化する好みの違いを反映した経路が探索されるようになる。
【0014】
また、上記係数決定関係としては、たとえば、請求項4のように、ベイジアンネットワークモデルを用いることができる。ただし、それ以外にも、上記係数決定関係として、ニューラルネットワーク、サポートベクターマシーン、ファジィ推論、協調フィルタなどを用いることもできる。
【0015】
上記重み係数決定手段は、請求項5記載のように、コスト評価関数に含まれる複数の重み係数を一組とする重み係数テーブルが複数含まれている重み係数テーブル集合から、一組の重み係数テーブルを選択することによって重み係数を決定することができる。また、請求項6のように、重み係数テーブルを複数選択して、それら複数の重み係数テーブルをそれぞれ用いて複数の経路候補を計算して、その複数の経路候補から最終的に1つの経路を決定するようにしてもよい。
【0016】
すなわち、請求項6記載のナビゲーションシステムは、請求項1乃至4のいずれかに記載のナビゲーションシステムにおいて、前記重み係数決定手段は、前記コスト評価関数に含まれる複数の重み係数を一組とする重み係数テーブルが複数組含まれる重み係数テーブル集合から、複数組の重み係数テーブルを選択するものであり、前記状況情報および前記ユーザ情報に基づいて予め設定された種類の道路属性についての嗜好が決定される道路属性嗜好決定関係を用いて、実際に検出された前記状況情報および実際の前記ユーザ情報からその道路属性の嗜好を決定する道路属性嗜好決定手段をさらに備え、
前記経路探索手段は、前記重み係数決定手段で選択した複数組の重み係数テーブルをそれぞれ用いて複数の経路候補を探索する経路候補探索手段と、その経路候補探索手段によって探索された複数の経路候補について、前記道路属性嗜好決定手段によって決定される種類の道路属性を決定する道路属性決定手段と、その道路属性決定手段によって前記複数の経路候補についてそれぞれ決定された道路属性と、前記道路属性嗜好決定手段によって決定された道路属性嗜好とに基づいて、各経路候補の嗜好合致度を算出して、その嗜好合致度が最も高い経路候補を最良の候補として確定する経路確定手段とを含んでいることを特徴とする。
【0017】
また、請求項5または6のようにして重み係数を決定する場合には、請求項7記載のようにして係数決定関係を学習することが好ましい。すなわち、請求項7記載の発明は、請求項5または6記載のナビゲーションシステムにおいて、前記重み係数テーブル集合に含まれる各重み係数テーブルをそれぞれ用いたコスト評価関数に基づいて探索される経路のうち、実際に走行した走行経路に最も近い最近似経路を決定する最近似経路決定手段と、前記重み係数決定手段において、前記走行経路を走行したときの前記状況情報に基づいて、前記最近似経路決定手段によって決定された最近時経路の探索に用いられた重み係数テーブルが選択されるように、前記係数決定関係を修正する関係修正手段とを、さらに含むことを特徴とする。
【0018】
このように、重み係数決定手段において、走行経路を走行したときの状況情報に基づいて、走行経路に最も近い最近似経路の探索に用いられた重み係数テーブルが選択されるように、係数決定関係が修正されることにより、状況情報の変化によって変化するユーザの好みを反映したより適切な経路が探索されるようになる。
【0019】
なお、請求項8記載の発明は、請求項1乃至7に記載のナビゲーションシステムにおける前記重み係数決定手段を実行する係数決定プログラムであり、このプログラムは、車載カーナビゲーション装置など、ユーザが操作する端末装置内のEPROMやハードディスクなどの固定型の記憶装置に記憶されていてもよいし、ディスク型記憶媒体などの可搬型の記憶装置(または記憶媒体)に記憶されていてもよい。また、このプログラムがサーバ内の記憶装置に記憶されていてもよい。
【発明を実施するための最良の形態】
【0020】
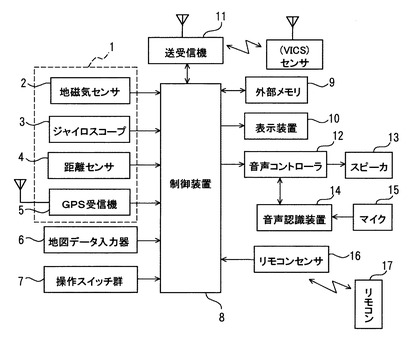
以下、本発明の実施の形態を、図面に基づいて説明する。図1は、本発明が適用されたカーナビゲーションシステムの全体構成を示すブロック図である。
【0021】
図1において、カーナビゲーションシステムは、位置検出器1、地図データ入力器6、操作スイッチ群7、外部メモリ9、表示装置10、送受信機11、音声コントローラ12、スピーカ13、音声認識装置14、マイク15、リモコンセンサ16、リモートコントロール端末(以下、リモコンと称する)17と、これら各装置が接続された制御装置8を備えている。
【0022】
制御装置8は、通常のコンピュータであり、内部には周知のCPU、ROM、RAM、I/Oおよびこれらの構成を接続するためのバスラインを備えている。ROMには、制御装置8が実行するためのプログラムが書き込まれており、このプログラムに従ってCPU等が所定の演算処理を実行する。
【0023】
位置検出器1は、車両の絶対方位を検出するための地磁気センサ2、車両の相対方位を検出するためのジャイロスコープ3、車両の走行距離を検出する距離センサ4、および衛星からの電波に基づいて車両の位置を測定するグローバルポジショニングシステム(GPS)のためのGPS受信機5を有している。これらのセンサ等2、3、4、5は、いずれも周知のものである。これらのセンサ等2、3、4、5は各々が性質の異なる誤差を持っているため、複数のセンサ等2、3、4、5により各々を補完しながら使用するように構成されている。なお、精度によっては、上述したうちの一部で位置検出器1を構成してもよく、更に、図示しないステアリングの回転センサ、各転動輪の車速センサ等を用いてもよい。
【0024】
地図データ入力器6は、たとえばDVD−ROM、CD−ROMなどの図示しない記憶媒体を備え、その記憶媒体には、道路データ、背景データ、文字データおよび施設データなどを含むデジタル地図データが格納されており、それらのデータを制御装置8に入力する。
【0025】
操作スイッチ群7は、たとえば表示装置10と一体になったタッチスイッチもしくは表示装置10の周辺に設けられるメカニカルなスイッチ等からなり、表示装置10に表示された地図の縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等の各種入力に使用される。また、リモコン17には、図示しない複数の操作スイッチが設けられ、その操作スイッチの操作により操作スイッチ群7と同様の入力操作が行える。リモコン17に入力された入力操作を表す信号は、リモコンセンサ16を介して制御装置8へ供給される。
【0026】
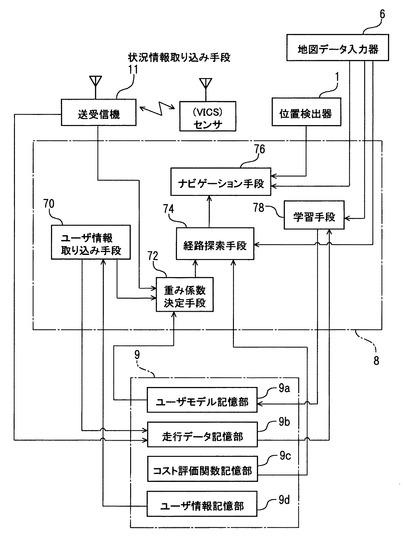
記憶装置である外部メモリ9は、たとえば、メモリカードやハードディスク等であり、書き込み可能な記憶媒体を備えている。この外部メモリ9には、ユーザによって設定された自宅位置や、テキストデータ、画像データ、音声データ等の各種データが記憶される。また、外部メモリ9は、ユーザモデル記憶部9a、走行データ記憶部9b、コスト評価関数記憶部9c、およびユーザ情報記憶部9dを備えている(図2参照)。
【0027】
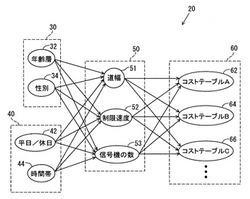
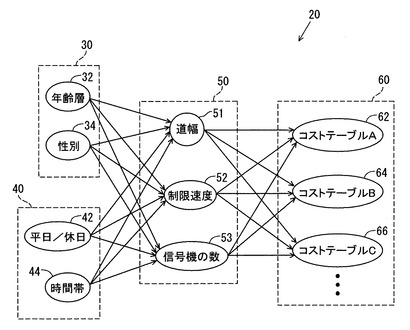
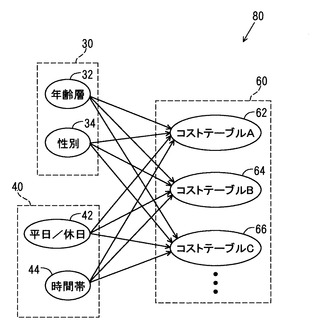
上記ユーザモデル記憶部9aは、係数決定関係である図3に示すベイジアンネットモデル20を記憶する領域である。図3に示すベイジアンネットモデル20は、ユーザ情報30、状況情報40、推薦理由50、および、コストテーブル集合60を有している。ユーザ情報30は、ノードとして、年齢層ノード32および性別ノード34を備え、状況情報40は平日/休日ノード42および時間帯ノード44を備え、推薦理由50は道幅ノード51、制限速度ノード52、信号機の数ノード53を備え、コストテーブル集合60は、コストテーブルAノード62、コストテーブルBノード64、コストテーブルCノード66などの複数のコストテーブルノードを備えている。
【0028】
年齢層ノード32は、10代、20代、…等の状態をとり、性別ノード34は男または女の2状態をとる。平日/休日ノード42は平日と休日との2状態をとり、時間帯ノード44は、24時間が複数の時間帯(たとえば、4時間ずつ、2時間ずつ、1時間ずつなど)に区分されることにより複数の状態をとる。なお、これら年齢層ノード32、性別ノード34、平日/休日ノード42、および時間帯ノード44は観測変数である。
【0029】
推薦理由50は、経路探索において大事とされる(重要とされる)項目であり、換言すれば、ユーザ(運転者)の嗜好を表している。道幅ノード51は道幅が大事とされている程度を表すノード、制限速度ノード52は制限速度が大事とされている程度を表すノード、信号機の数ノード53は信号機の数が大事とされている程度を表すノードであり、それぞれ、重要性1、2、3等の複数の状態をとることで、その大事さ(重要性)を表すようになっている。
【0030】
コストテーブルAノード62、コストテーブルBノード64、コストテーブルCノード66等のコストテーブル集合60に含まれる各コストテーブルノードは、コストテーブルA、B、C…と対応づけられている。ここで、コストテーブルとは、式1に示すコスト評価関数Ciにおける重み係数α、β、γ、δ…を一組とするテーブル(表)であり、特許請求の範囲の重み係数テーブルに相当する。また、コストテーブル集合は、重み係数テーブル集合に相当する。
(式1) Ci=αA・a(i)+βA・b(i)+γA・c(i)+δA・d(i)+…
式1において、a(i)は距離のコスト、b(i)は道幅のコスト、c(i)は制限速度のコスト、d(i)は信号機の数のコストであり、式1に含まれるその他のコストとしては、たとえば、平均走行時間のコストがある。また、係数α、β等における添え字Aは、コストテーブルに対応するものである。なお、このコスト評価関数Ciは、コスト評価関数記憶部9cに記憶されている。
【0031】
上記コストテーブルAノード62、コストテーブルBノード64等は、対応するコストテーブルを上記コスト評価関数Ciに用いることが最適である確率(尤度)を表すノードであり、その確率が段階的に変化するテーブルが記憶されている。
【0032】
コストテーブル集合60に含まれるノード62、64、66は、推薦理由50を表すノード51、52、53の子ノードとなっており、推薦理由50を表すノード51、52、53は、ユーザ情報30および状況情報40を表すノード32、34、42、44の子ノードとなっている。換言すれば、ユーザ情報30および状況情報40を表すノード32、34、42、44は、推薦理由50を表すノード51、52、53の親ノードとなっており、推薦理由50を表すノード51、52、53は、コストテーブル集合60に含まれるノード62、64、66の親ノードになっている。親ノードと子ノードとの間は矢印で連結されており、この矢印は、矢印の根元のノードと矢印の先のノードとの間の条件付依存性を表し、個々の矢印に対応する条件付確率が設定されている。
【0033】
このように構成されたベイジアンネットモデル20に、ユーザ情報と、状況情報とが与えられると、コストテーブル集合60に含まれるコストテーブルのノード62、64、66の尤度が決定される。
【0034】
走行データ記憶部9bは、車両が走行した経路を、そのときの状況情報とそのときのユーザとともに記憶する領域である。また、ユーザ情報記憶部9dは、複数のユーザについて、ユーザ情報である性別および年齢層をユーザIDと関連付けて記憶している領域である。なお、年齢は一年に一度変化するため、年齢層もある年数経過すると変化するが、年齢は、現在の日付が定まれば、不変情報である生年月日から定まるので、ユーザの不変的情報すなわちユーザ情報として用いることができるのである。
【0035】
図1へ戻って、表示装置10は、たとえば液晶ディスプレイ、有機ELディスプレイによって構成され、その表示装置10の所定の地図表示領域には、車両の現在位置に対応する自車位置マークが地図データによって生成された車両周辺の道路地図上に重畳表示される。また、表示装置10には、その他に、現在時刻、渋滞情報などの他の情報表示を付加的に表示することもできる。
【0036】
送受信機11は、外部との通信接続をするための通信機であり、道路に敷設されたビーコンや各地のFM放送局を介して、VICS(Vehicle Information and Communication System)(登録商標)センタから提供される道路交通情報、気象情報、日付情報、施設情報、広告情報を受信するVICSセンサと接続され、この道路交通情報等を制御装置8へ送信する。また、上記制御装置8で処理した情報を送受信機11から出力することもできる。
【0037】
スピーカ13は、音声コントローラ12から入力された音声出力信号に基づき所定の音声(案内のための音声や画面操作の説明、音声認識結果等)を外部に出力する。
【0038】
マイク15は、操作者が発声した音声を電気信号として音声認識装置14に入力する。音声認識装置14は、マイク15から入力された操作者の入力音声と、内部に記憶する認識辞書(不図示)中の語彙データ(比較対照パターン)とを照合し、最も一致度の高いものを認識結果として音声コントローラ12に入力する。
【0039】
音声コントローラ12は、音声認識装置14を制御するとともに、音声入力のあった操作者に対し、スピーカ13を通じてトークバック出力制御(音声出力)する。また、音声認識装置14の認識結果を制御装置8に入力する処理も行う。
【0040】
制御装置8は、音声認識装置14からの情報に基づき、操作者の発声に対する所定の処理および操作スイッチ群7あるいはリモコン17の入力操作に対する所定の処理(たとえば、メモリ9への地図データの記憶処理、地図縮尺変更処理、メニュー表示選択処理、目的地設定処理、経路探索実行処理、経路案内開始処理、現在位置修正処理、表示画面変更処理、音量調整処理等)を実行する。また、制御装置8で処理された経路案内音声情報等は、音声コントローラ12を介してスピーカ13から適宜報知される。
【0041】
ここで、上記目的地設定処理は、リモコン17または操作スイッチ群7の操作に基づいて行われ、また、経路探索実行処理は、外部メモリ9のユーザモデル記憶部9aに記憶されたベイジアンネットモデル20にユーザ情報である年齢層と性別、および状況情報である平日/休日の区別と時間帯とを入力することによりコストテーブルを選択し、その選択したコストテーブルを用いたコスト評価関数Ciに基づいて行われる。その際、経路は複数探索されるようになっていてもよい。さらに、制御装置8は、実際に走行した経路に基づいて、上記ベイジアンネットモデル20を学習(修正)するようになっている。
【0042】
図2は、上記制御装置8の制御機能の要部を示すブロック図である。図2に示すように、制御装置8は、ユーザ情報取り込み手段70と、重み係数決定手段72と、経路探索手段74と、ナビゲーション手段76と、学習手段78とを備えている。
【0043】
ユーザ情報取り込み手段70は、運転者が誰であるかを判定して、その判定した運転者のユーザ情報(すなわち、本実施形態では、そのユーザの年齢層および性別)を、外部メモリ9のユーザ情報記憶部9dから取り込む。運転者が誰であるかを判定する方法としては、ここでは、予め登録された複数のユーザのリストを表示装置10に表示し、その表示装置10に表示されたリストから、操作スイッチ群7またはリモコン17の操作により、運転者がどのユーザを選択したかによって判定する。
【0044】
重み係数決定手段72は、まず、上記ユーザ情報取り込み手段70によって取り込んだユーザ情報と、送受信機11を介して得られる日付情報から決定される平日か休日かの区別、および、車両内部に設けられた図示しない時計からの信号に基づいて決定される時間帯を、ベイジアンネットモデル20に入力する。そして、これらを入力することによって、コストテーブル集合60に含まれる各コストテーブルノードについての尤度が決定できるので、尤度の最も高いコストテーブルを選択する。なお、本実施形態では、送受信機11を介して得られる日付情報から、状況情報である平日/休日の区別を決定するので、送受信機11は状況情報取り込み手段として機能している。
【0045】
経路探索手段74は、重み係数決定手段72によって選択されたコストテーブル(すなわち一組の重み係数)を用いたコスト評価関数Ciと、地図データ入力器6からの地図データに基づいて、出発地から目的地までの経路探索を行う。なお、出発地は、現在位置であってもよいが、現在位置とは異なる地点がユーザによって設定されてもよい。
【0046】
ナビゲーション手段76は、経路探索手段74によって探索された経路、位置検出器1によって逐次検出される車両の現在位置、および、地図データ入力器6からの地図データに基づいて、経路案内を実行する。
【0047】
学習手段78は、目的地に到達後、実際に走行した走行経路と、そのときの状況情報およびユーザ情報とに基づいて、ベイジアンネットモデル20の学習を実行する。この学習手段78については、後述する図5で詳しく示す。なお、学習は、目的地に到達後、すぐに実行する必要はなく、所定の学習周期が経過したときに実行するようになっていてもよい。
【0048】
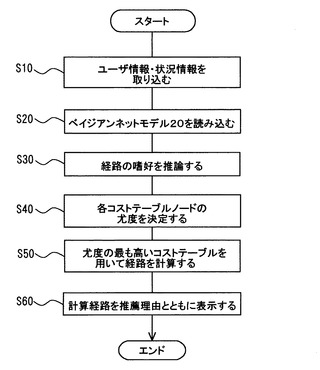
図4は、図2に示した制御装置8の制御機能のうち、重み係数決定手段72および経路探索手段74に相当する機能をフローチャートにして示す図である。図4においては、ステップS10乃至S40が重み係数決定手段に相当し、ステップS50乃至S60が経路探索手段に相当する。
【0049】
まず、ステップS10では、ユーザ情報および状況情報を取り込む。すなわち、予め登録されたユーザの一覧を示すユーザリストを表示装置10に表示し、そのユーザリストから、操作スイッチ群7またはリモコン17の操作によって選択されたユーザに関する年齢層および性別を、外部メモリ9のユーザ情報記憶部9dから読み出す。また、送受信機11を介して日付情報を取得して、その日付情報から平日/休日の区別を決定し、さらに、車両内部に設けられた時計から信号を取得して時間帯を決定する。
【0050】
続くステップS20では、ユーザモデル記憶部9aからベイジアンネットモデル20を読み込む。そして、続くステップS30では、ユーザの経路の嗜好を推定する。前述のように、ユーザの経路の嗜好は推薦理由50に対応するので、ステップS30では、推薦理由50に含まれる各ノード51、52、53の状態を決定する。すなわち、ステップS20において読み込んだベイジアンネットモデル20に、ステップS10で取得または決定した、ユーザの年齢層、性別、および平日/休日の区別、時間帯を、ベイジアンネットモデル20の年齢層ノード32、性別ノード34、平日/休日ノード42および時間帯ノード44にそれぞれ入力する。そして、それらのノード32、34、42、44の子ノードである道幅ノード51、制限速度ノード52、信号機の数ノード53の状態(大事さ)をそれぞれ決定する。
【0051】
さらに、続くステップS40では、ステップS30で決定した道幅ノード51の状態、制限速度ノード52の状態、信号機の数ノード53の状態から、コストテーブル集合60に含まれる各コストテーブルノード62、64、66等の尤度を、コストテーブルノード毎にそれぞれ決定する。
【0052】
そして、ステップS50では、ステップS40で決定した尤度が最も高いコストテーブルを選択し、その選択したコストテーブルを重み係数として用いたコスト評価関数Ciに基づいて、ダイクストラ法等の所定の手法によって目的地から出発地までの経路を計算する。
【0053】
続くステップS60では、上記ステップS50で計算した経路を、その経路の推薦理由とともに表示装置10に表示する。この推薦理由とは、その経路計算に用いたコストテーブルを選択したときのベイジアンネットモデル20における推薦理由50内のノード51、52、53のうちで、最も重要度が大きいノードである。
【0054】
このようにして経路を計算した後は、計算経路に基づいて経路案内を行い、目的地まで到達後、或いは、所定の学習時期となったときに、図5に示すルーチンを実行する。
【0055】
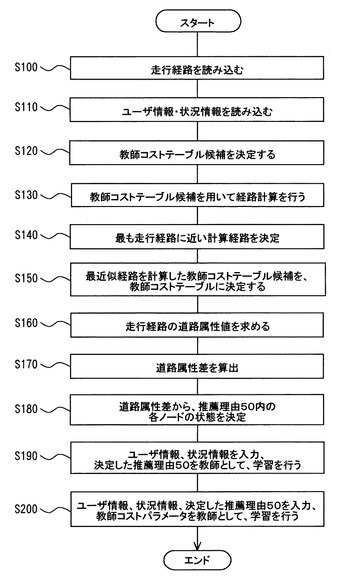
まず、ステップS100では、走行データ記憶部9bから実際に走行した走行経路を読み込み、さらに、ステップS110では、その走行経路に関連づけて記憶されているその走行時のユーザ情報(年齢層、性別)および状況情報(平日/休日の区別、時間帯)を読み込む。
【0056】
そして、ステップS120では、コストテーブル集合60の中から、予め設定された数の教師コストテーブル候補を決定する。すなわち、まず、ユーザモデル記憶部9aからベイジアンネットモデル20を読み込み、その読み込んだベイジアンネットモデル20に、ステップS110で読み込んだ年齢層、性別、平日/休日の区分、時間帯を入力し、その結果算出されるコストテーブル集合60のノード62、64、66等の尤度を比較して、尤度の高いものから順に所定数のコストテーブルを教師コストテーブル候補とする。
【0057】
続くステップS130では、ステップS120で決定した複数の教師コストテーブル候補をそれぞれ用いて経路計算を実行する。すなわち、各教師コストテーブル候補を一組の重み係数として用いたコスト評価関数Ciに基づいて経路計算を実行する。
【0058】
続くステップS140では、ステップS130で計算した複数の計算経路を、ステップS100で読み込んだ走行経路と比較し、計算経路と走行経路との一致度を、各計算経路について決定する。この一致度は、たとえば、出発地から目的地までのX座標について、計算経路と走行経路とのY座標差を積算することにより行う。そして、比較の結果、走行経路に最も近い計算経路を最近似経路に決定する。なお、ステップS110乃至S140によって最近似経路決定手段が構成される。また、以下のステップS150乃至S200によって関係修正手段が構成される。
【0059】
ステップS150では、ステップS140において最近似経路を計算したコストテーブルを、教師コストテーブルに決定する。続くステップS160では、走行経路の道路属性値を算出する。この道路属性値とは、ベイジアンネットモデル20の推薦理由50に含まれる各ノード51、52、53に対応する属性に関する値である。すなわち、本実施形態では、道路属性値として、道幅に関する値(たとえば、車線数の平均)、制限速度に関する値(たとえば、平均の制限速度)、信号機の数に関する値(たとえば、信号機の総数)を算出する。
【0060】
そして、続くステップS170では、計算経路のうち最も走行経路に近い経路についても同様に道路属性値を算出し、さらに、その算出した道路属性値と、ステップS160で算出した走行経路の道路属性値との差(道路属性差)を算出する。この道路属性差は、走行経路側を正とすると、信号機の数であれば、たとえば、−10機のように算出できる。
【0061】
続くステップS180では、上記ステップS170で算出した道路属性差に基づいて、その道路属性差から推薦理由50の状態を決定する予め設定された対応関係を用いて、推薦理由50内の各ノード51、52、53の状態を決定する。
【0062】
続くステップS190では、ステップS110で読み込んだユーザ情報および状況情報を入力とし、上記ステップS180で決定した推薦理由50を教師として、ベイジアンネットモデル20におけるユーザ情報30および状況情報40(親ノード)と、推薦理由50(子ノード)との間の関係を学習する。
【0063】
さらに、ステップS200では、ステップS110で読み込んだユーザ情報と状況情報、および、上記ステップS180で決定した推薦理由50を入力とし、ステップS150で決定した教師コストテーブルを教師として、ベイジアンネットモデル20における推薦理由50(親ノード)と、コストテーブル集合60(子ノード)との間の関係を学習する。
【0064】
このようにベイジアンネットモデル20を学習することにより、以後、図4に示すフローチャートを実行した場合、今回と同じ状況情報に基づいて、今回の走行経路に最も近い最近似経路を探索できる重み係数テーブルが選択されるようになるので、状況情報の変化によって変化するユーザの好みを反映したより適切な経路が探索されるようになる。
【0065】
以上、説明した本実施形態によれば、平日/休日の区別および時間帯に基づいて、コスト評価関数のコストパラメータに乗じられる重み係数が決定されることから、平日か休日かの違いや時間帯の違いによってユーザの好みが変化するとしても、ユーザの好みに合った経路が探索される。
【0066】
また、本実施形態によれば、平日/休日の区別および時間帯に加えて、ユーザの年齢層と性別をも用いてコストパラメータに乗じられる重み係数を決定するようになっているので、コストパラメータの重み付けがよりユーザの好みを反映したものとなり、よりユーザの好みを反映した経路を探索できる。
【0067】
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、次の実施形態も本発明の技術的範囲に含まれ、さらに、下記以外にも要旨を逸脱しない範囲内で種々変更して実施することができる。
【0068】
たとえば、前述の実施形態において用いたベイジアンネットモデル20に代えて、図6ベイジアンネットモデル80を用いることもできる。
【0069】
図6に示すベイジアンネットモデル80は、図2に示すベイジアンネットモデル20における推薦理由50がなく、ユーザ情報30および状況情報40がコストテーブル集合60の親ノードとなっている点において図2のベイジアンネットモデル20と異なるのみである。このように、推薦理由50を省略してユーザ情報30および状況情報40から、直接、コストテーブル集合60に含まれるノード62の尤度を推定しても良い。
【0070】
また、前述の実施形態のベイジアンネットモデル20では、状況情報として、平日/休日の区別と時間帯とを用いていたが、それ以外にも、状況情報としては、曜日、天気、季節、渋滞、同乗者の有無、所持金の程度などを用いることもできる。
【0071】
また、ユーザ情報の例として、年齢層、性別を示したが、それ以外に、ユーザの住所やユーザの職業、年齢、出身地を用いることもできる。
【0072】
また、前述の実施形態では、図4で計算した計算経路が走行経路に最も近いかどうかに関係なくベイジアンネットモデル20を修正していたが、複数のコストテーブルを用いて計算される経路のうちで、図4で計算した計算経路が走行経路に最も近い場合には、ベイジアンネットモデル20の学習を行わないようにしてもよい。
【0073】
また、前述の実施形態では、予め登録されたユーザの一覧を示すユーザリストを表示装置10に表示し、そのユーザリストから、操作スイッチ群7またはリモコン17の操作によってどのユーザが選択されるかによって、ユーザを識別していたが、画像認識、音声認識等、公知の他のユーザ識別方法によってユーザを識別してもよい。また、ユーザを識別せず、ユーザ情報を直接入力するようになっていてもよい。
【0074】
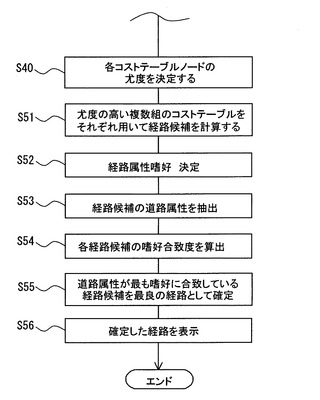
また、前述の実施形態では、尤度の最も高い1つのコストテーブルを選択していたが(ステップS50)、次述する図7に示すように、尤度の高い順に、予め定められた複数のコストテーブルを選択し、選択した各コストテーブルに基づいて複数の経路候補を計算し、その中から1つの経路を最良の経路として決定してもよい。
【0075】
図7において、ステップS40までは図4のステップS10乃至S40と同様の処理を実行する。続くステップS51は、経路候補探索手段に相当し、ステップS40で決定した尤度が高いコストテーブルから順に、予め設定された数のコストテーブルを選択し、選択した各コストテーブルをそれぞれ重み係数として用いた複数のコスト評価関数Ciに基づいて、ダイクストラ法等の所定の手法によって目的地から出発地までの複数の経路候補を計算する。
【0076】
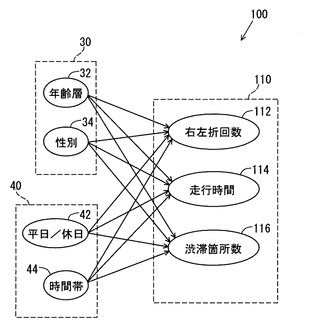
続くステップS52は道路属性嗜好決定手段に相当し、ステップS10で取り込んだユーザ情報および状況情報をベイジアンネットモデルの形態で予め構築された図8に示す道路属性嗜好決定関係100の各観測ノード32、34、42、44に入力することにより、道路属性嗜好ノード110である右左折回数ノード112、走行時間ノード114、渋滞箇所数ノード116の各尤度を決定する。この尤度は、右左折回数ノード112については、たとえば、右左折回数の10回未満という状態に対する尤度が70%、右左折回数10回以上という状態に対する尤度が30%というように決定できる。
【0077】
なお、図8に示したもの以外に、道路属性嗜好としては、たとえば、(1)信号の割合(信号の平均間隔)、(2)橋・トンネルなど、通りにくい場所として予め設定された場所が出発地にどれほど近いか、(3)遠回りをしているか、などがあり、いずれも、ダイクストラ法で用いられる道路のリンク単位の嗜好ではなく、経路全体の特徴(嗜好)を表すものである。
【0078】
続くステップS53は道路属性決定手段に相当し、ステップS51で計算した各経路候補について、道路属性(ここでは、右左折回数、走行時間、渋滞箇所数)を計算する。なお、渋滞箇所数は、地図データに予め記憶されている渋滞箇所を通過する回数である。
【0079】
続いて、経路確定手段に相当するステップS54乃至S55を実行する。ステップS54では、ステップS51で計算した各経路候補の嗜好合致度を算出する。この嗜好合致度は、各経路候補について道路属性(すなわち、ここでは、右左折回数、走行時間、渋滞箇所数)の尤度を合計した値であり、道路属性の尤度は、たとえば、ある経路候補の右左折回数が11回であるとすると、尤度が30%というように決定できる。
【0080】
そして、ステップS55では、嗜好合致度が最も高い経路候補を最良の経路として確定し、続くステップS56では、その決定した最良の経路を表示装置10に表示する。
【図面の簡単な説明】
【0081】
【図1】本発明が適用されたカーナビゲーションシステムの全体構成を示すブロック図である。
【図2】図1の制御装置8の制御機能の要部を示すブロック図である。
【図3】図2のユーザモデル記憶部9aに記憶されているベイジアンネットモデル20を示す図である。
【図4】図2に示した制御装置8の制御機能のうち、重み係数決定手段72および経路探索手段74に相当する機能をフローチャートにして示す図である。
【図5】図2に示す学習手段78をフローチャートにして示す図である。
【図6】図3とは別のベイジアンネットモデル80を示す図である。
【図7】図4に代えて実行する制御装置8の制御機能を示すフローチャートである。
【図8】図7のステップS52で道路属性嗜好の決定に用いる道路属性嗜好決定関係の一例を示す図である。
【符号の説明】
【0082】
9:外部メモリ(記憶装置)
20:ベイジアンネットモデル(係数決定関係)
72:重み係数決定手段
74:経路探索手段
76:ナビゲーション手段
78:学習手段
80:ベイジアンネットモデル(係数決定関係)
100:道路属性嗜好決定関係
S51:経路候補探索手段
S52:道路属性嗜好決定手段
S53:道路属性決定手段
S54乃至S55:経路確定手段
S110乃至S140:最近似経路決定手段
S150乃至S200:関係修正手段
【技術分野】
【0001】
本発明は、ナビゲーションシステム、および、そのナビゲーションシステムに用いる係数決定プログラムに関し、特に、出発地から目的地までの経路を探索する機能を備えたナビゲーションシステムおよびプログラムに関する。
【背景技術】
【0002】
カーナビゲーションシステムに代表されるナビゲーションシステムは、出発地から目的地までの経路を探索する機能を備えていることが一般的である。経路の探索を行う方法としては、重み係数が乗じられる複数種類のコストパラメータの総コストが最小になるような経路を、ダイクストラ法などによって決定する方法がある(たとえば、特許文献1)。
【0003】
特許文献1は、カーナビゲーションシステムの例であり、コストパラメータとして、距離、平均走行時間、道幅などを用いている。それら複数種類のコストパラメータに乗じられる重み係数を変化させると、経路探索において重視するコストパラメータを変更できる。
【0004】
特許文献1の装置は、評価関数の数値が最小となる経路から順に複数の経路を探索し、探索した複数の経路を運転者に提示するようにしている。そして、運転者が選択した経路が、評価関数の数値が最小のものでない場合には、パラメータの重み係数を変更(学習)するようにしている。すなわち、運転者が選択した経路における各パラメータのコスト値を、他の経路における各パラメータのコスト値と比較し、運転者が選択した経路においてコスト値が大きくなっているパラメータの重み係数を小さくするようにしている。このようにすることにより、学習を繰り返すうちに、距離を重視する、時間を重視する、走りやすさを重視するなどの運転者の好みが反映された経路が優先的に探索されるようになる。
【特許文献1】特開平5−224601号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
特許文献1のものは、学習を繰り返すことによって、運転者の好みが反映された経路が探索されるようになるが、運転者の好みは常に同じとは限らず、たとえば、平日は目的地に早く着きたいが、休日は多少遅くなっても良いので、走りやすい道を好むなどということもある。また、時間帯によって好みが変わることも考えられる。たとえば、仕事帰りの夕方は走りやすい道を走りたいが、それ以外の時間帯は、走行時間が短いほうがよいなどということが考えられる。
【0006】
このように、運転者の好みは、平日か休日か、あるいは、時間帯など、短期的に変化する状況によって変わることもあるのだが、特許文献1の装置の場合には、運転者の好みが変化することは考慮されておらず、その結果、運転者の好みが反映された経路が常に探索されるとは限らないという問題がある。
【0007】
なお、この問題は、車用のナビゲーションシステム(すなわち、カーナビゲーションシステム)に限らず、携帯型のナビゲーションシステムについても、同様に生じる可能性がある。
【0008】
本発明は、上記問題点に鑑みて成されたものであり、本発明の目的とするところは、短期的に変化する状況によってユーザの好みが変化しても、ユーザの好みに合った経路が探索されるナビゲーションシステム、および、そのナビゲーションシステムに使用する評価関数の重み係数を決定するプログラムを提供することにある。
【課題を解決するための手段】
【0009】
その目的を達成するための請求項1記載の発明は、重み係数が乗じられる複数種類のコストパラメータの総コストを算出するコスト評価関数を用いて出発地から目的地までの経路を探索する形式のナビゲーションシステムであって、短期的に変化する予め設定された種類の状況情報に基づいて前記コストパラメータの重み係数が定まる係数決定関係を記憶した記憶装置と、その記憶装置に記憶された係数決定関係および実際に検出された前記状況情報に基づいて、前記コストパラメータの重み係数を決定する重み係数決定手段とを、含むことを特徴とする。
【0010】
この請求項1記載の発明によれば、短期的に変化する状況情報に基づいて、コスト評価関数のコストパラメータに乗じられる重み係数が決定されることから、その状況情報の変化によってユーザの好みが変化するとしても、ユーザの好みに合った経路が探索される。
【0011】
ここで、請求項2記載のように、前記記憶装置に記憶された係数決定関係は、前記状況情報に加えて、ユーザの不変的な情報であるユーザ情報に基づいて、前記重み係数が定まるようになっており、前記重み係数決定手段は、その係数決定関係、実際に検出された前記状況情報、および、実際のユーザの前記ユーザ情報に基づいて、前記コストパラメータの重み係数を決定するようになっていることが好ましい。
【0012】
このように、状況情報に加えてユーザ情報をも用いてコストパラメータの重み係数を決定するようにすれば、状況情報のみに基づいて重み係数を決定する場合よりも、コストパラメータの重み付けがよりユーザの好みを反映したものとなることから、よりユーザの好みを反映した経路を探索できるようになる。
【0013】
また、前記係数決定関係は、請求項3のように、平日と休日との2つの状態をとる観測変数を有していることが好ましい。このようにすれば、平日か休日かが反映されて重み係数が決定されるようになるので、平日か休日かによって変化する好みの違いを反映した経路が探索されるようになる。
【0014】
また、上記係数決定関係としては、たとえば、請求項4のように、ベイジアンネットワークモデルを用いることができる。ただし、それ以外にも、上記係数決定関係として、ニューラルネットワーク、サポートベクターマシーン、ファジィ推論、協調フィルタなどを用いることもできる。
【0015】
上記重み係数決定手段は、請求項5記載のように、コスト評価関数に含まれる複数の重み係数を一組とする重み係数テーブルが複数含まれている重み係数テーブル集合から、一組の重み係数テーブルを選択することによって重み係数を決定することができる。また、請求項6のように、重み係数テーブルを複数選択して、それら複数の重み係数テーブルをそれぞれ用いて複数の経路候補を計算して、その複数の経路候補から最終的に1つの経路を決定するようにしてもよい。
【0016】
すなわち、請求項6記載のナビゲーションシステムは、請求項1乃至4のいずれかに記載のナビゲーションシステムにおいて、前記重み係数決定手段は、前記コスト評価関数に含まれる複数の重み係数を一組とする重み係数テーブルが複数組含まれる重み係数テーブル集合から、複数組の重み係数テーブルを選択するものであり、前記状況情報および前記ユーザ情報に基づいて予め設定された種類の道路属性についての嗜好が決定される道路属性嗜好決定関係を用いて、実際に検出された前記状況情報および実際の前記ユーザ情報からその道路属性の嗜好を決定する道路属性嗜好決定手段をさらに備え、
前記経路探索手段は、前記重み係数決定手段で選択した複数組の重み係数テーブルをそれぞれ用いて複数の経路候補を探索する経路候補探索手段と、その経路候補探索手段によって探索された複数の経路候補について、前記道路属性嗜好決定手段によって決定される種類の道路属性を決定する道路属性決定手段と、その道路属性決定手段によって前記複数の経路候補についてそれぞれ決定された道路属性と、前記道路属性嗜好決定手段によって決定された道路属性嗜好とに基づいて、各経路候補の嗜好合致度を算出して、その嗜好合致度が最も高い経路候補を最良の候補として確定する経路確定手段とを含んでいることを特徴とする。
【0017】
また、請求項5または6のようにして重み係数を決定する場合には、請求項7記載のようにして係数決定関係を学習することが好ましい。すなわち、請求項7記載の発明は、請求項5または6記載のナビゲーションシステムにおいて、前記重み係数テーブル集合に含まれる各重み係数テーブルをそれぞれ用いたコスト評価関数に基づいて探索される経路のうち、実際に走行した走行経路に最も近い最近似経路を決定する最近似経路決定手段と、前記重み係数決定手段において、前記走行経路を走行したときの前記状況情報に基づいて、前記最近似経路決定手段によって決定された最近時経路の探索に用いられた重み係数テーブルが選択されるように、前記係数決定関係を修正する関係修正手段とを、さらに含むことを特徴とする。
【0018】
このように、重み係数決定手段において、走行経路を走行したときの状況情報に基づいて、走行経路に最も近い最近似経路の探索に用いられた重み係数テーブルが選択されるように、係数決定関係が修正されることにより、状況情報の変化によって変化するユーザの好みを反映したより適切な経路が探索されるようになる。
【0019】
なお、請求項8記載の発明は、請求項1乃至7に記載のナビゲーションシステムにおける前記重み係数決定手段を実行する係数決定プログラムであり、このプログラムは、車載カーナビゲーション装置など、ユーザが操作する端末装置内のEPROMやハードディスクなどの固定型の記憶装置に記憶されていてもよいし、ディスク型記憶媒体などの可搬型の記憶装置(または記憶媒体)に記憶されていてもよい。また、このプログラムがサーバ内の記憶装置に記憶されていてもよい。
【発明を実施するための最良の形態】
【0020】
以下、本発明の実施の形態を、図面に基づいて説明する。図1は、本発明が適用されたカーナビゲーションシステムの全体構成を示すブロック図である。
【0021】
図1において、カーナビゲーションシステムは、位置検出器1、地図データ入力器6、操作スイッチ群7、外部メモリ9、表示装置10、送受信機11、音声コントローラ12、スピーカ13、音声認識装置14、マイク15、リモコンセンサ16、リモートコントロール端末(以下、リモコンと称する)17と、これら各装置が接続された制御装置8を備えている。
【0022】
制御装置8は、通常のコンピュータであり、内部には周知のCPU、ROM、RAM、I/Oおよびこれらの構成を接続するためのバスラインを備えている。ROMには、制御装置8が実行するためのプログラムが書き込まれており、このプログラムに従ってCPU等が所定の演算処理を実行する。
【0023】
位置検出器1は、車両の絶対方位を検出するための地磁気センサ2、車両の相対方位を検出するためのジャイロスコープ3、車両の走行距離を検出する距離センサ4、および衛星からの電波に基づいて車両の位置を測定するグローバルポジショニングシステム(GPS)のためのGPS受信機5を有している。これらのセンサ等2、3、4、5は、いずれも周知のものである。これらのセンサ等2、3、4、5は各々が性質の異なる誤差を持っているため、複数のセンサ等2、3、4、5により各々を補完しながら使用するように構成されている。なお、精度によっては、上述したうちの一部で位置検出器1を構成してもよく、更に、図示しないステアリングの回転センサ、各転動輪の車速センサ等を用いてもよい。
【0024】
地図データ入力器6は、たとえばDVD−ROM、CD−ROMなどの図示しない記憶媒体を備え、その記憶媒体には、道路データ、背景データ、文字データおよび施設データなどを含むデジタル地図データが格納されており、それらのデータを制御装置8に入力する。
【0025】
操作スイッチ群7は、たとえば表示装置10と一体になったタッチスイッチもしくは表示装置10の周辺に設けられるメカニカルなスイッチ等からなり、表示装置10に表示された地図の縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等の各種入力に使用される。また、リモコン17には、図示しない複数の操作スイッチが設けられ、その操作スイッチの操作により操作スイッチ群7と同様の入力操作が行える。リモコン17に入力された入力操作を表す信号は、リモコンセンサ16を介して制御装置8へ供給される。
【0026】
記憶装置である外部メモリ9は、たとえば、メモリカードやハードディスク等であり、書き込み可能な記憶媒体を備えている。この外部メモリ9には、ユーザによって設定された自宅位置や、テキストデータ、画像データ、音声データ等の各種データが記憶される。また、外部メモリ9は、ユーザモデル記憶部9a、走行データ記憶部9b、コスト評価関数記憶部9c、およびユーザ情報記憶部9dを備えている(図2参照)。
【0027】
上記ユーザモデル記憶部9aは、係数決定関係である図3に示すベイジアンネットモデル20を記憶する領域である。図3に示すベイジアンネットモデル20は、ユーザ情報30、状況情報40、推薦理由50、および、コストテーブル集合60を有している。ユーザ情報30は、ノードとして、年齢層ノード32および性別ノード34を備え、状況情報40は平日/休日ノード42および時間帯ノード44を備え、推薦理由50は道幅ノード51、制限速度ノード52、信号機の数ノード53を備え、コストテーブル集合60は、コストテーブルAノード62、コストテーブルBノード64、コストテーブルCノード66などの複数のコストテーブルノードを備えている。
【0028】
年齢層ノード32は、10代、20代、…等の状態をとり、性別ノード34は男または女の2状態をとる。平日/休日ノード42は平日と休日との2状態をとり、時間帯ノード44は、24時間が複数の時間帯(たとえば、4時間ずつ、2時間ずつ、1時間ずつなど)に区分されることにより複数の状態をとる。なお、これら年齢層ノード32、性別ノード34、平日/休日ノード42、および時間帯ノード44は観測変数である。
【0029】
推薦理由50は、経路探索において大事とされる(重要とされる)項目であり、換言すれば、ユーザ(運転者)の嗜好を表している。道幅ノード51は道幅が大事とされている程度を表すノード、制限速度ノード52は制限速度が大事とされている程度を表すノード、信号機の数ノード53は信号機の数が大事とされている程度を表すノードであり、それぞれ、重要性1、2、3等の複数の状態をとることで、その大事さ(重要性)を表すようになっている。
【0030】
コストテーブルAノード62、コストテーブルBノード64、コストテーブルCノード66等のコストテーブル集合60に含まれる各コストテーブルノードは、コストテーブルA、B、C…と対応づけられている。ここで、コストテーブルとは、式1に示すコスト評価関数Ciにおける重み係数α、β、γ、δ…を一組とするテーブル(表)であり、特許請求の範囲の重み係数テーブルに相当する。また、コストテーブル集合は、重み係数テーブル集合に相当する。
(式1) Ci=αA・a(i)+βA・b(i)+γA・c(i)+δA・d(i)+…
式1において、a(i)は距離のコスト、b(i)は道幅のコスト、c(i)は制限速度のコスト、d(i)は信号機の数のコストであり、式1に含まれるその他のコストとしては、たとえば、平均走行時間のコストがある。また、係数α、β等における添え字Aは、コストテーブルに対応するものである。なお、このコスト評価関数Ciは、コスト評価関数記憶部9cに記憶されている。
【0031】
上記コストテーブルAノード62、コストテーブルBノード64等は、対応するコストテーブルを上記コスト評価関数Ciに用いることが最適である確率(尤度)を表すノードであり、その確率が段階的に変化するテーブルが記憶されている。
【0032】
コストテーブル集合60に含まれるノード62、64、66は、推薦理由50を表すノード51、52、53の子ノードとなっており、推薦理由50を表すノード51、52、53は、ユーザ情報30および状況情報40を表すノード32、34、42、44の子ノードとなっている。換言すれば、ユーザ情報30および状況情報40を表すノード32、34、42、44は、推薦理由50を表すノード51、52、53の親ノードとなっており、推薦理由50を表すノード51、52、53は、コストテーブル集合60に含まれるノード62、64、66の親ノードになっている。親ノードと子ノードとの間は矢印で連結されており、この矢印は、矢印の根元のノードと矢印の先のノードとの間の条件付依存性を表し、個々の矢印に対応する条件付確率が設定されている。
【0033】
このように構成されたベイジアンネットモデル20に、ユーザ情報と、状況情報とが与えられると、コストテーブル集合60に含まれるコストテーブルのノード62、64、66の尤度が決定される。
【0034】
走行データ記憶部9bは、車両が走行した経路を、そのときの状況情報とそのときのユーザとともに記憶する領域である。また、ユーザ情報記憶部9dは、複数のユーザについて、ユーザ情報である性別および年齢層をユーザIDと関連付けて記憶している領域である。なお、年齢は一年に一度変化するため、年齢層もある年数経過すると変化するが、年齢は、現在の日付が定まれば、不変情報である生年月日から定まるので、ユーザの不変的情報すなわちユーザ情報として用いることができるのである。
【0035】
図1へ戻って、表示装置10は、たとえば液晶ディスプレイ、有機ELディスプレイによって構成され、その表示装置10の所定の地図表示領域には、車両の現在位置に対応する自車位置マークが地図データによって生成された車両周辺の道路地図上に重畳表示される。また、表示装置10には、その他に、現在時刻、渋滞情報などの他の情報表示を付加的に表示することもできる。
【0036】
送受信機11は、外部との通信接続をするための通信機であり、道路に敷設されたビーコンや各地のFM放送局を介して、VICS(Vehicle Information and Communication System)(登録商標)センタから提供される道路交通情報、気象情報、日付情報、施設情報、広告情報を受信するVICSセンサと接続され、この道路交通情報等を制御装置8へ送信する。また、上記制御装置8で処理した情報を送受信機11から出力することもできる。
【0037】
スピーカ13は、音声コントローラ12から入力された音声出力信号に基づき所定の音声(案内のための音声や画面操作の説明、音声認識結果等)を外部に出力する。
【0038】
マイク15は、操作者が発声した音声を電気信号として音声認識装置14に入力する。音声認識装置14は、マイク15から入力された操作者の入力音声と、内部に記憶する認識辞書(不図示)中の語彙データ(比較対照パターン)とを照合し、最も一致度の高いものを認識結果として音声コントローラ12に入力する。
【0039】
音声コントローラ12は、音声認識装置14を制御するとともに、音声入力のあった操作者に対し、スピーカ13を通じてトークバック出力制御(音声出力)する。また、音声認識装置14の認識結果を制御装置8に入力する処理も行う。
【0040】
制御装置8は、音声認識装置14からの情報に基づき、操作者の発声に対する所定の処理および操作スイッチ群7あるいはリモコン17の入力操作に対する所定の処理(たとえば、メモリ9への地図データの記憶処理、地図縮尺変更処理、メニュー表示選択処理、目的地設定処理、経路探索実行処理、経路案内開始処理、現在位置修正処理、表示画面変更処理、音量調整処理等)を実行する。また、制御装置8で処理された経路案内音声情報等は、音声コントローラ12を介してスピーカ13から適宜報知される。
【0041】
ここで、上記目的地設定処理は、リモコン17または操作スイッチ群7の操作に基づいて行われ、また、経路探索実行処理は、外部メモリ9のユーザモデル記憶部9aに記憶されたベイジアンネットモデル20にユーザ情報である年齢層と性別、および状況情報である平日/休日の区別と時間帯とを入力することによりコストテーブルを選択し、その選択したコストテーブルを用いたコスト評価関数Ciに基づいて行われる。その際、経路は複数探索されるようになっていてもよい。さらに、制御装置8は、実際に走行した経路に基づいて、上記ベイジアンネットモデル20を学習(修正)するようになっている。
【0042】
図2は、上記制御装置8の制御機能の要部を示すブロック図である。図2に示すように、制御装置8は、ユーザ情報取り込み手段70と、重み係数決定手段72と、経路探索手段74と、ナビゲーション手段76と、学習手段78とを備えている。
【0043】
ユーザ情報取り込み手段70は、運転者が誰であるかを判定して、その判定した運転者のユーザ情報(すなわち、本実施形態では、そのユーザの年齢層および性別)を、外部メモリ9のユーザ情報記憶部9dから取り込む。運転者が誰であるかを判定する方法としては、ここでは、予め登録された複数のユーザのリストを表示装置10に表示し、その表示装置10に表示されたリストから、操作スイッチ群7またはリモコン17の操作により、運転者がどのユーザを選択したかによって判定する。
【0044】
重み係数決定手段72は、まず、上記ユーザ情報取り込み手段70によって取り込んだユーザ情報と、送受信機11を介して得られる日付情報から決定される平日か休日かの区別、および、車両内部に設けられた図示しない時計からの信号に基づいて決定される時間帯を、ベイジアンネットモデル20に入力する。そして、これらを入力することによって、コストテーブル集合60に含まれる各コストテーブルノードについての尤度が決定できるので、尤度の最も高いコストテーブルを選択する。なお、本実施形態では、送受信機11を介して得られる日付情報から、状況情報である平日/休日の区別を決定するので、送受信機11は状況情報取り込み手段として機能している。
【0045】
経路探索手段74は、重み係数決定手段72によって選択されたコストテーブル(すなわち一組の重み係数)を用いたコスト評価関数Ciと、地図データ入力器6からの地図データに基づいて、出発地から目的地までの経路探索を行う。なお、出発地は、現在位置であってもよいが、現在位置とは異なる地点がユーザによって設定されてもよい。
【0046】
ナビゲーション手段76は、経路探索手段74によって探索された経路、位置検出器1によって逐次検出される車両の現在位置、および、地図データ入力器6からの地図データに基づいて、経路案内を実行する。
【0047】
学習手段78は、目的地に到達後、実際に走行した走行経路と、そのときの状況情報およびユーザ情報とに基づいて、ベイジアンネットモデル20の学習を実行する。この学習手段78については、後述する図5で詳しく示す。なお、学習は、目的地に到達後、すぐに実行する必要はなく、所定の学習周期が経過したときに実行するようになっていてもよい。
【0048】
図4は、図2に示した制御装置8の制御機能のうち、重み係数決定手段72および経路探索手段74に相当する機能をフローチャートにして示す図である。図4においては、ステップS10乃至S40が重み係数決定手段に相当し、ステップS50乃至S60が経路探索手段に相当する。
【0049】
まず、ステップS10では、ユーザ情報および状況情報を取り込む。すなわち、予め登録されたユーザの一覧を示すユーザリストを表示装置10に表示し、そのユーザリストから、操作スイッチ群7またはリモコン17の操作によって選択されたユーザに関する年齢層および性別を、外部メモリ9のユーザ情報記憶部9dから読み出す。また、送受信機11を介して日付情報を取得して、その日付情報から平日/休日の区別を決定し、さらに、車両内部に設けられた時計から信号を取得して時間帯を決定する。
【0050】
続くステップS20では、ユーザモデル記憶部9aからベイジアンネットモデル20を読み込む。そして、続くステップS30では、ユーザの経路の嗜好を推定する。前述のように、ユーザの経路の嗜好は推薦理由50に対応するので、ステップS30では、推薦理由50に含まれる各ノード51、52、53の状態を決定する。すなわち、ステップS20において読み込んだベイジアンネットモデル20に、ステップS10で取得または決定した、ユーザの年齢層、性別、および平日/休日の区別、時間帯を、ベイジアンネットモデル20の年齢層ノード32、性別ノード34、平日/休日ノード42および時間帯ノード44にそれぞれ入力する。そして、それらのノード32、34、42、44の子ノードである道幅ノード51、制限速度ノード52、信号機の数ノード53の状態(大事さ)をそれぞれ決定する。
【0051】
さらに、続くステップS40では、ステップS30で決定した道幅ノード51の状態、制限速度ノード52の状態、信号機の数ノード53の状態から、コストテーブル集合60に含まれる各コストテーブルノード62、64、66等の尤度を、コストテーブルノード毎にそれぞれ決定する。
【0052】
そして、ステップS50では、ステップS40で決定した尤度が最も高いコストテーブルを選択し、その選択したコストテーブルを重み係数として用いたコスト評価関数Ciに基づいて、ダイクストラ法等の所定の手法によって目的地から出発地までの経路を計算する。
【0053】
続くステップS60では、上記ステップS50で計算した経路を、その経路の推薦理由とともに表示装置10に表示する。この推薦理由とは、その経路計算に用いたコストテーブルを選択したときのベイジアンネットモデル20における推薦理由50内のノード51、52、53のうちで、最も重要度が大きいノードである。
【0054】
このようにして経路を計算した後は、計算経路に基づいて経路案内を行い、目的地まで到達後、或いは、所定の学習時期となったときに、図5に示すルーチンを実行する。
【0055】
まず、ステップS100では、走行データ記憶部9bから実際に走行した走行経路を読み込み、さらに、ステップS110では、その走行経路に関連づけて記憶されているその走行時のユーザ情報(年齢層、性別)および状況情報(平日/休日の区別、時間帯)を読み込む。
【0056】
そして、ステップS120では、コストテーブル集合60の中から、予め設定された数の教師コストテーブル候補を決定する。すなわち、まず、ユーザモデル記憶部9aからベイジアンネットモデル20を読み込み、その読み込んだベイジアンネットモデル20に、ステップS110で読み込んだ年齢層、性別、平日/休日の区分、時間帯を入力し、その結果算出されるコストテーブル集合60のノード62、64、66等の尤度を比較して、尤度の高いものから順に所定数のコストテーブルを教師コストテーブル候補とする。
【0057】
続くステップS130では、ステップS120で決定した複数の教師コストテーブル候補をそれぞれ用いて経路計算を実行する。すなわち、各教師コストテーブル候補を一組の重み係数として用いたコスト評価関数Ciに基づいて経路計算を実行する。
【0058】
続くステップS140では、ステップS130で計算した複数の計算経路を、ステップS100で読み込んだ走行経路と比較し、計算経路と走行経路との一致度を、各計算経路について決定する。この一致度は、たとえば、出発地から目的地までのX座標について、計算経路と走行経路とのY座標差を積算することにより行う。そして、比較の結果、走行経路に最も近い計算経路を最近似経路に決定する。なお、ステップS110乃至S140によって最近似経路決定手段が構成される。また、以下のステップS150乃至S200によって関係修正手段が構成される。
【0059】
ステップS150では、ステップS140において最近似経路を計算したコストテーブルを、教師コストテーブルに決定する。続くステップS160では、走行経路の道路属性値を算出する。この道路属性値とは、ベイジアンネットモデル20の推薦理由50に含まれる各ノード51、52、53に対応する属性に関する値である。すなわち、本実施形態では、道路属性値として、道幅に関する値(たとえば、車線数の平均)、制限速度に関する値(たとえば、平均の制限速度)、信号機の数に関する値(たとえば、信号機の総数)を算出する。
【0060】
そして、続くステップS170では、計算経路のうち最も走行経路に近い経路についても同様に道路属性値を算出し、さらに、その算出した道路属性値と、ステップS160で算出した走行経路の道路属性値との差(道路属性差)を算出する。この道路属性差は、走行経路側を正とすると、信号機の数であれば、たとえば、−10機のように算出できる。
【0061】
続くステップS180では、上記ステップS170で算出した道路属性差に基づいて、その道路属性差から推薦理由50の状態を決定する予め設定された対応関係を用いて、推薦理由50内の各ノード51、52、53の状態を決定する。
【0062】
続くステップS190では、ステップS110で読み込んだユーザ情報および状況情報を入力とし、上記ステップS180で決定した推薦理由50を教師として、ベイジアンネットモデル20におけるユーザ情報30および状況情報40(親ノード)と、推薦理由50(子ノード)との間の関係を学習する。
【0063】
さらに、ステップS200では、ステップS110で読み込んだユーザ情報と状況情報、および、上記ステップS180で決定した推薦理由50を入力とし、ステップS150で決定した教師コストテーブルを教師として、ベイジアンネットモデル20における推薦理由50(親ノード)と、コストテーブル集合60(子ノード)との間の関係を学習する。
【0064】
このようにベイジアンネットモデル20を学習することにより、以後、図4に示すフローチャートを実行した場合、今回と同じ状況情報に基づいて、今回の走行経路に最も近い最近似経路を探索できる重み係数テーブルが選択されるようになるので、状況情報の変化によって変化するユーザの好みを反映したより適切な経路が探索されるようになる。
【0065】
以上、説明した本実施形態によれば、平日/休日の区別および時間帯に基づいて、コスト評価関数のコストパラメータに乗じられる重み係数が決定されることから、平日か休日かの違いや時間帯の違いによってユーザの好みが変化するとしても、ユーザの好みに合った経路が探索される。
【0066】
また、本実施形態によれば、平日/休日の区別および時間帯に加えて、ユーザの年齢層と性別をも用いてコストパラメータに乗じられる重み係数を決定するようになっているので、コストパラメータの重み付けがよりユーザの好みを反映したものとなり、よりユーザの好みを反映した経路を探索できる。
【0067】
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、次の実施形態も本発明の技術的範囲に含まれ、さらに、下記以外にも要旨を逸脱しない範囲内で種々変更して実施することができる。
【0068】
たとえば、前述の実施形態において用いたベイジアンネットモデル20に代えて、図6ベイジアンネットモデル80を用いることもできる。
【0069】
図6に示すベイジアンネットモデル80は、図2に示すベイジアンネットモデル20における推薦理由50がなく、ユーザ情報30および状況情報40がコストテーブル集合60の親ノードとなっている点において図2のベイジアンネットモデル20と異なるのみである。このように、推薦理由50を省略してユーザ情報30および状況情報40から、直接、コストテーブル集合60に含まれるノード62の尤度を推定しても良い。
【0070】
また、前述の実施形態のベイジアンネットモデル20では、状況情報として、平日/休日の区別と時間帯とを用いていたが、それ以外にも、状況情報としては、曜日、天気、季節、渋滞、同乗者の有無、所持金の程度などを用いることもできる。
【0071】
また、ユーザ情報の例として、年齢層、性別を示したが、それ以外に、ユーザの住所やユーザの職業、年齢、出身地を用いることもできる。
【0072】
また、前述の実施形態では、図4で計算した計算経路が走行経路に最も近いかどうかに関係なくベイジアンネットモデル20を修正していたが、複数のコストテーブルを用いて計算される経路のうちで、図4で計算した計算経路が走行経路に最も近い場合には、ベイジアンネットモデル20の学習を行わないようにしてもよい。
【0073】
また、前述の実施形態では、予め登録されたユーザの一覧を示すユーザリストを表示装置10に表示し、そのユーザリストから、操作スイッチ群7またはリモコン17の操作によってどのユーザが選択されるかによって、ユーザを識別していたが、画像認識、音声認識等、公知の他のユーザ識別方法によってユーザを識別してもよい。また、ユーザを識別せず、ユーザ情報を直接入力するようになっていてもよい。
【0074】
また、前述の実施形態では、尤度の最も高い1つのコストテーブルを選択していたが(ステップS50)、次述する図7に示すように、尤度の高い順に、予め定められた複数のコストテーブルを選択し、選択した各コストテーブルに基づいて複数の経路候補を計算し、その中から1つの経路を最良の経路として決定してもよい。
【0075】
図7において、ステップS40までは図4のステップS10乃至S40と同様の処理を実行する。続くステップS51は、経路候補探索手段に相当し、ステップS40で決定した尤度が高いコストテーブルから順に、予め設定された数のコストテーブルを選択し、選択した各コストテーブルをそれぞれ重み係数として用いた複数のコスト評価関数Ciに基づいて、ダイクストラ法等の所定の手法によって目的地から出発地までの複数の経路候補を計算する。
【0076】
続くステップS52は道路属性嗜好決定手段に相当し、ステップS10で取り込んだユーザ情報および状況情報をベイジアンネットモデルの形態で予め構築された図8に示す道路属性嗜好決定関係100の各観測ノード32、34、42、44に入力することにより、道路属性嗜好ノード110である右左折回数ノード112、走行時間ノード114、渋滞箇所数ノード116の各尤度を決定する。この尤度は、右左折回数ノード112については、たとえば、右左折回数の10回未満という状態に対する尤度が70%、右左折回数10回以上という状態に対する尤度が30%というように決定できる。
【0077】
なお、図8に示したもの以外に、道路属性嗜好としては、たとえば、(1)信号の割合(信号の平均間隔)、(2)橋・トンネルなど、通りにくい場所として予め設定された場所が出発地にどれほど近いか、(3)遠回りをしているか、などがあり、いずれも、ダイクストラ法で用いられる道路のリンク単位の嗜好ではなく、経路全体の特徴(嗜好)を表すものである。
【0078】
続くステップS53は道路属性決定手段に相当し、ステップS51で計算した各経路候補について、道路属性(ここでは、右左折回数、走行時間、渋滞箇所数)を計算する。なお、渋滞箇所数は、地図データに予め記憶されている渋滞箇所を通過する回数である。
【0079】
続いて、経路確定手段に相当するステップS54乃至S55を実行する。ステップS54では、ステップS51で計算した各経路候補の嗜好合致度を算出する。この嗜好合致度は、各経路候補について道路属性(すなわち、ここでは、右左折回数、走行時間、渋滞箇所数)の尤度を合計した値であり、道路属性の尤度は、たとえば、ある経路候補の右左折回数が11回であるとすると、尤度が30%というように決定できる。
【0080】
そして、ステップS55では、嗜好合致度が最も高い経路候補を最良の経路として確定し、続くステップS56では、その決定した最良の経路を表示装置10に表示する。
【図面の簡単な説明】
【0081】
【図1】本発明が適用されたカーナビゲーションシステムの全体構成を示すブロック図である。
【図2】図1の制御装置8の制御機能の要部を示すブロック図である。
【図3】図2のユーザモデル記憶部9aに記憶されているベイジアンネットモデル20を示す図である。
【図4】図2に示した制御装置8の制御機能のうち、重み係数決定手段72および経路探索手段74に相当する機能をフローチャートにして示す図である。
【図5】図2に示す学習手段78をフローチャートにして示す図である。
【図6】図3とは別のベイジアンネットモデル80を示す図である。
【図7】図4に代えて実行する制御装置8の制御機能を示すフローチャートである。
【図8】図7のステップS52で道路属性嗜好の決定に用いる道路属性嗜好決定関係の一例を示す図である。
【符号の説明】
【0082】
9:外部メモリ(記憶装置)
20:ベイジアンネットモデル(係数決定関係)
72:重み係数決定手段
74:経路探索手段
76:ナビゲーション手段
78:学習手段
80:ベイジアンネットモデル(係数決定関係)
100:道路属性嗜好決定関係
S51:経路候補探索手段
S52:道路属性嗜好決定手段
S53:道路属性決定手段
S54乃至S55:経路確定手段
S110乃至S140:最近似経路決定手段
S150乃至S200:関係修正手段
【特許請求の範囲】
【請求項1】
重み係数が乗じられる複数種類のコストパラメータの総コストを算出するコスト評価関数を用いて出発地から目的地までの最良の経路を探索する経路探索手段を有するナビゲーションシステムであって、
短期的に変化する予め設定された種類の状況情報に基づいて前記コストパラメータの重み係数が定まる係数決定関係を記憶した記憶装置と、
その記憶装置に記憶された係数決定関係および実際に検出された前記状況情報に基づいて、前記コストパラメータの重み係数を決定する重み係数決定手段と
を、含むことを特徴とするナビゲーションシステム。
【請求項2】
前記記憶装置に記憶された係数決定関係は、前記状況情報に加えて、ユーザの不変的な情報であるユーザ情報に基づいて、前記重み係数が定まるようになっており、
前記重み係数決定手段は、その係数決定関係、実際に検出された前記状況情報、および、実際のユーザの前記ユーザ情報に基づいて、前記コストパラメータの重み係数を決定するようになっている
ことを特徴とする請求項1に記載のナビゲーションシステム。
【請求項3】
前記係数決定関係は、平日と休日との2つの状態をとる観測変数を有していることを特徴とする請求項1または2記載のナビゲーションシステム。
【請求項4】
前記係数決定関係は、ベイジアンネットワークモデルであることを特徴とする請求項1乃至3のいずれかに記載のナビゲーションシステム。
【請求項5】
前記重み係数決定手段は、前記コスト評価関数に含まれる複数の重み係数を一組とする重み係数テーブルが複数組含まれる重み係数テーブル集合から、一組の重み係数テーブルを選択するものであることを特徴とする請求項1乃至4のいずれかに記載のナビゲーションシステム。
【請求項6】
請求項1乃至4のいずれかに記載のナビゲーションシステムであって、
前記重み係数決定手段は、前記コスト評価関数に含まれる複数の重み係数を一組とする重み係数テーブルが複数組含まれる重み係数テーブル集合から、複数組の重み係数テーブルを選択するものであり、
前記状況情報および前記ユーザ情報に基づいて予め設定された種類の道路属性についての嗜好が決定される道路属性嗜好決定関係を用いて、実際に検出された前記状況情報および実際の前記ユーザ情報からその道路属性の嗜好を決定する道路属性嗜好決定手段をさらに備え、
前記経路探索手段は、
前記重み係数決定手段で選択した複数組の重み係数テーブルをそれぞれ用いて複数の経路候補を探索する経路候補探索手段と、
その経路候補探索手段によって探索された複数の経路候補について、前記道路属性嗜好決定手段によって決定される種類の道路属性を決定する道路属性決定手段と、
その道路属性決定手段によって前記複数の経路候補についてそれぞれ決定された道路属性と、前記道路属性嗜好決定手段によって決定された道路属性嗜好とに基づいて、各経路候補の嗜好合致度を算出して、その嗜好合致度が最も高い経路候補を最良の候補として確定する経路確定手段とを含んでいる
ことを特徴とするナビゲーションシステム。
【請求項7】
請求項5または6に記載のナビゲーションシステムであって、
前記重み係数テーブル集合に含まれる各重み係数テーブルをそれぞれ用いたコスト評価関数に基づいて探索される経路のうち、実際に走行した走行経路に最も近い最近似経路を決定する最近似経路決定手段と、
前記重み係数決定手段において、前記走行経路を走行したときの前記状況情報に基づいて、前記最近似経路決定手段によって決定された最近時経路の探索に用いられた重み係数テーブルが選択されるように、前記係数決定関係を修正する関係修正手段と
を、さらに含むことを特徴とするナビゲーションシステム。
【請求項8】
請求項1乃至7のいずれかに記載のナビゲーションシステムにおける前記重み係数決定手段を実行する係数決定プログラム。
【請求項1】
重み係数が乗じられる複数種類のコストパラメータの総コストを算出するコスト評価関数を用いて出発地から目的地までの最良の経路を探索する経路探索手段を有するナビゲーションシステムであって、
短期的に変化する予め設定された種類の状況情報に基づいて前記コストパラメータの重み係数が定まる係数決定関係を記憶した記憶装置と、
その記憶装置に記憶された係数決定関係および実際に検出された前記状況情報に基づいて、前記コストパラメータの重み係数を決定する重み係数決定手段と
を、含むことを特徴とするナビゲーションシステム。
【請求項2】
前記記憶装置に記憶された係数決定関係は、前記状況情報に加えて、ユーザの不変的な情報であるユーザ情報に基づいて、前記重み係数が定まるようになっており、
前記重み係数決定手段は、その係数決定関係、実際に検出された前記状況情報、および、実際のユーザの前記ユーザ情報に基づいて、前記コストパラメータの重み係数を決定するようになっている
ことを特徴とする請求項1に記載のナビゲーションシステム。
【請求項3】
前記係数決定関係は、平日と休日との2つの状態をとる観測変数を有していることを特徴とする請求項1または2記載のナビゲーションシステム。
【請求項4】
前記係数決定関係は、ベイジアンネットワークモデルであることを特徴とする請求項1乃至3のいずれかに記載のナビゲーションシステム。
【請求項5】
前記重み係数決定手段は、前記コスト評価関数に含まれる複数の重み係数を一組とする重み係数テーブルが複数組含まれる重み係数テーブル集合から、一組の重み係数テーブルを選択するものであることを特徴とする請求項1乃至4のいずれかに記載のナビゲーションシステム。
【請求項6】
請求項1乃至4のいずれかに記載のナビゲーションシステムであって、
前記重み係数決定手段は、前記コスト評価関数に含まれる複数の重み係数を一組とする重み係数テーブルが複数組含まれる重み係数テーブル集合から、複数組の重み係数テーブルを選択するものであり、
前記状況情報および前記ユーザ情報に基づいて予め設定された種類の道路属性についての嗜好が決定される道路属性嗜好決定関係を用いて、実際に検出された前記状況情報および実際の前記ユーザ情報からその道路属性の嗜好を決定する道路属性嗜好決定手段をさらに備え、
前記経路探索手段は、
前記重み係数決定手段で選択した複数組の重み係数テーブルをそれぞれ用いて複数の経路候補を探索する経路候補探索手段と、
その経路候補探索手段によって探索された複数の経路候補について、前記道路属性嗜好決定手段によって決定される種類の道路属性を決定する道路属性決定手段と、
その道路属性決定手段によって前記複数の経路候補についてそれぞれ決定された道路属性と、前記道路属性嗜好決定手段によって決定された道路属性嗜好とに基づいて、各経路候補の嗜好合致度を算出して、その嗜好合致度が最も高い経路候補を最良の候補として確定する経路確定手段とを含んでいる
ことを特徴とするナビゲーションシステム。
【請求項7】
請求項5または6に記載のナビゲーションシステムであって、
前記重み係数テーブル集合に含まれる各重み係数テーブルをそれぞれ用いたコスト評価関数に基づいて探索される経路のうち、実際に走行した走行経路に最も近い最近似経路を決定する最近似経路決定手段と、
前記重み係数決定手段において、前記走行経路を走行したときの前記状況情報に基づいて、前記最近似経路決定手段によって決定された最近時経路の探索に用いられた重み係数テーブルが選択されるように、前記係数決定関係を修正する関係修正手段と
を、さらに含むことを特徴とするナビゲーションシステム。
【請求項8】
請求項1乃至7のいずれかに記載のナビゲーションシステムにおける前記重み係数決定手段を実行する係数決定プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−10571(P2007−10571A)
【公開日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願番号】特願2005−194103(P2005−194103)
【出願日】平成17年7月1日(2005.7.1)
【出願人】(000004260)株式会社デンソー (27,639)
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【Fターム(参考)】
【公開日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願日】平成17年7月1日(2005.7.1)
【出願人】(000004260)株式会社デンソー (27,639)
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【Fターム(参考)】
[ Back to top ]