
ナビゲーションシステム、およびGPS測位解精度判定方法
【課題】マルチパスやCWノイズ等の影響によるGPS測位解の精度低下を検知する。
【解決手段】複数のGPS衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得手段と、自律航法のための自律航法情報を出力する情報出力手段と、該出力された自律航法情報と該GPS測位解との比較結果に基づいて所定の参照値を算出する参照値算出手段と、該算出された所定の参照値と、該測位の過程で得られるクロック・オフセット値との差分を算出する差分算出手段とを具備し、該算出される差分に基づいて該GPS測位解の精度を判断するナビゲーションシステムを提供する。
【解決手段】複数のGPS衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得手段と、自律航法のための自律航法情報を出力する情報出力手段と、該出力された自律航法情報と該GPS測位解との比較結果に基づいて所定の参照値を算出する参照値算出手段と、該算出された所定の参照値と、該測位の過程で得られるクロック・オフセット値との差分を算出する差分算出手段とを具備し、該算出される差分に基づいて該GPS測位解の精度を判断するナビゲーションシステムを提供する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、複数のGPS(Global Positioning System)衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得手段を有し、当該の測位の過程で得られるクロック・オフセット値に基づいて当該のGPS測位解の精度を判断するナビゲーションシステム、およびGPS測位解精度判定方法に関する。
【背景技術】
【0002】
車両には、自己の位置、移動速度、方位等を推定することが可能なナビゲーションシステムが実装されている。このようなナビゲーションシステムには、例えばGPS受信装置、DR(Dead Reckoning)センサ、地図データベース等が備えられている。ナビゲーションシステムは、GPS受信装置による測位解(以下、「GPS測位解」と記す)とDRセンサによる測位解(以下、「DR測位解」と記す)とを併用して自己の位置、移動速度、方位等を推定し、更に、地図データベースから得られる地図情報を用いてマップマッチングして最終的な推定情報をユーザに提示する。例えば下記特許文献1にこのようなナビゲーションシステムの一例が開示されている。なお、説明の便宜上、以降は、各測位解に含まれる推定情報、および測位解を併用した結果得られる推定情報を「前段推定情報」と記し、マップマッチングして得られる最終的な推定情報を「推定情報」と記す。
【0003】
上記DRセンサには、例えば車速センサやジャイロセンサ等が含まれる。車速センサは、車両の左右の駆動輪の回転速度を検出してその平均速度に応じた車速パルス信号を生成する。ジャイロセンサは、車両の方位に関する角速度を計測する。
【0004】
ここで、車速パルス信号が1パルス出力される毎に車両が進む距離(以下、「距離係数」と記す)は、車種、タイヤ径、車両重量、路面状態等で変動する。このような距離係数の変動は、DR測位解を劣化させる要因となる。このため、距離係数の変動は、GPS測位解、ジャイロセンサの出力、地図情報等に基づいて逐次校正される。また、ジャイロセンサの感度は、個体差や取り付け誤差によってばらつく。また、そのバイアスも個体差や周囲温度によってばらつく。このようなばらつきは、先と同様にDR測位解を劣化させる要因となる。このため、これらのばらつきは、GPS測位解、車速パルス信号、地図情報等に基づいて逐次校正される。このように、ナビゲーションシステムは、距離係数やジャイロセンサの感度およびバイアスを補正・学習しながら位置、移動速度、方位等を推定している。以下、説明の便宜上、ナビゲーションシステムのこのような動作を「センサ学習」と記す。
【0005】
ナビゲーションシステムは、上述のようにGPS測位解とDR測位解とを併用する場合、互いを比較して演算を行い、その結果に基づいて位置、移動速度、方位等を推定する。この場合、前段推定情報のサンプリングが複数あることから、一方の測位解による前段推定情報よりも精度の高い前段推定情報を得ることができる。このような観点から、GPS測位解とDR測位解とを常に併用して位置、移動速度、方位等を推定することが望ましい。
【0006】
しかし、車両は移動するため、ナビゲーションシステムを取り巻く環境も種々変化する。従って、ナビゲーションシステムの環境によっては、受信するGPS信号のノイズ等が混入してGPS測位解に誤差が生じることがある。このような場合、前段推定情報の精度が低下し、かつセンサ学習も劣化するという不都合がある。
【0007】
上記不都合を回避するため、例えば前段推定情報の算出やセンサ学習にGPS測位解を採用するか否かを、そのときのDOP(Dilution of Precision)に基づいて判断する方法がある。GPS測位解の精度はGPS衛星の幾何学的な配置に依存するため、ナビゲーションシステムは、例えばDOPが高いときにはGPS測位解に誤差が含まれているものとみなし、当該のGPS測位解を前段推定情報の算出やセンサ学習に用いないように動作する。精度の低いGPS測位解を前段推定情報の算出やセンサ学習に採用しないことにより、前段推定情報の精度低下やセンサ学習の劣化が軽減される。
【特許文献1】特開平11−190771号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ここで、上記の如きナビゲーションシステムは車両に搭載されたものであることから、GPS受信装置で受信されるGPS信号は、マルチパスやCW(continuous wave)ノイズ等の影響を受け易い。なお、マルチパスとは、GPS衛星からのGPS信号が高層ビル等の障害物で反射された後にGPS受信装置に受信され、その伝搬時間に誤差が生じる現象である。また、ここでのCWノイズは、その周波数成分がGPS信号のキャリア周波数に近いものであり、例えばGPS受信装置に近接して設置された電子機器からの不要輻射である。ここでいう電子機器には、例えばナビゲーションシステムに備えられたGPS受信装置以外の構成要素や、ナビゲーションシステムに近接して設置された車両の構成要素等が含まれる。
【0009】
GPS信号が上記マルチパスやCWノイズの影響を受けると、それによって得られるGPS測位解が誤差を含むものとなる。従って、先の説明と同様に、上述した不都合を回避するため、当該のGPS測位解を前段推定情報の算出やセンサ学習に採用すべきではない。ところが、マルチパスやCWノイズは、DOPとは無関係にGPS信号に影響を及ぼす。従って、例えばGPS信号がマルチパスやCWノイズの影響を受けている状態であってもDOPが低いことがある。この場合、GPS受信装置は、誤差を含むGPS測位解を排除することができず、前段推定情報の算出やセンサ学習に採用してしまうことがある。この結果、結局は、前段推定情報の精度が低下し、かつセンサ学習が劣化してしまう。
【0010】
そこで、本発明は上記の事情に鑑みて、前段推定情報の精度低下やセンサ学習の劣化等を軽減するため、マルチパスやCWノイズ等の影響によるGPS測位解の精度低下を検知するのに好適なナビゲーションシステムおよびGPS測位解精度判定方法を提供することを課題としている。
【課題を解決するための手段】
【0011】
上記の課題を解決する本発明の一態様に係るナビゲーションシステムは、複数のGPS衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得手段を有し、当該のGPS測位解の精度を判断するシステムである。このナビゲーションシステムは、自律航法のための自律航法情報を出力する情報出力手段と、該出力された自律航法情報と該GPS測位解との比較結果に基づいて所定の参照値を算出する参照値算出手段と、該算出された所定の参照値と、該測位の過程で得られるクロック・オフセット値との差分を算出する差分算出手段とを具備し、該算出される差分に基づいて該GPS測位解の精度を判断することを特徴としたものである。
【0012】
このように構成されたナビゲーションシステムによれば、例えばマルチパスやCWノイズ等の影響を受けたGPS測位解を検知することができる。このため、検知されたGPS測位解を推定情報の算出および自律航法情報の校正に用いないようにすることができ、結果、推定情報の精度低下やセンサ学習の劣化等を防ぐことが可能となる。
【0013】
上記ナビゲーションシステムは、例えば該クロック・オフセット値が所定の条件を満たすか否かを判定する条件判定手段と、該所定の条件を満たすと判定されたクロック・オフセット値を収集するクロック・オフセット値収集手段とを更に具備したものであっても良い。この場合、上記参照値算出手段は、例えば該収集されたクロック・オフセット値に基づいて該所定の参照値を算出する。
【0014】
上記該所定の条件に、例えば
(A)良好な受信状態で取得されたこと、
(B)所定の期間内に取得されたこと、
の少なくとも1つが含まれていても良い。
【0015】
上記条件判定手段は、例えば該GPS測位解と該自律航法情報に基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定する構成であっても良い。
【0016】
上記自律航法情報は、例えば該移動体の移動速度を示す車速パルスを含むものであっても良く、この場合、上記条件判定手段は、該GPS測位解に含まれる推定移動速度と該車速パルスに基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定する構成であっても良い。
【0017】
また、上記自律航法情報は、該移動体の方位を示す方位信号を更に含むものであっても良く、この場合、上記条件判定手段は、該GPS測位解に含まれる推定位置又は方位と、該車速パルスおよび該方位信号に基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定する構成であっても良い。
【0018】
また、上記クロック・オフセット値収集手段は、例えば収集してから該所定の期間を経過したクロック・オフセット値を消去しても良い。
【0019】
また、上記の課題を解決する本発明の一態様に係る、GPS測位解の精度を判断するGPS測位解精度判定方法は、複数のGPS衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得ステップと、自律航法のための自律航法情報を取得するステップと、該取得された自律航法情報と該GPS測位解との比較結果に基づいて所定の参照値を算出する参照値算出ステップと、該算出された所定の参照値と、該測位の過程で得られるクロック・オフセット値との差分を算出する差分算出ステップと、該算出される差分に基づいて該GPS測位解の精度を判断する精度判断ステップとを含む。
【0020】
このようなGPS測位解精度判定方法によれば、例えばマルチパスやCWノイズ等の影響を受けたGPS測位解を検知することができる。このため、検知されたGPS測位解を推定情報の算出および自律航法情報の校正に用いないようにすることができ、結果、推定情報の精度低下やセンサ学習の劣化等を防ぐことが可能となる。
【0021】
また、上記GPS測位解精度判定方法は、例えば該クロック・オフセット値が所定の条件を満たすか否かを判定する条件判定ステップと、該所定の条件を満たすと判定されたクロック・オフセット値を収集するクロック・オフセット値収集ステップとを更に含むものであっても良い。この場合、上記参照値算出ステップにおいて、該収集されたクロック・オフセット値に基づいて該所定の参照値が算出される。
【0022】
上記該所定の条件に、例えば
(A)良好な受信状態で取得されたこと、
(B)所定の期間内に取得されたこと、
の少なくとも1つが含まれていても良い。
【0023】
上記条件判定ステップにおいて、該GPS測位解と該自律航法情報に基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定しても良い。
【0024】
また、該自律航法情報に該移動体の移動速度を示す車速パルスが含まれるとき、上記条件判定ステップにおいて、該GPS測位解に含まれる推定移動速度と該車速パルスに基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定しても良い。
【0025】
また、該自律航法情報に該移動体の方位を示す方位信号が含まれるとき、条件判定ステップにおいて、該GPS測位解に含まれる推定位置又は方位と、該車速パルスおよび該方位信号に基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定しても良い。
【0026】
また、上記クロック・オフセット値収集ステップにおいて、収集してから該所定の期間を経過したクロック・オフセット値を消去しても良い。
【発明の効果】
【0027】
本発明に係るナビゲーションシステムおよびGPS測位解精度判定方法によれば、例えばマルチパスやCWノイズ等の影響を受けたGPS測位解を検知することができる。このため、検知されたGPS測位解を推定情報の算出および自律航法情報の校正に用いないようにすることができ、結果、推定情報の精度低下やセンサ学習の劣化等を防ぐことが可能となる。
【発明を実施するための最良の形態】
【0028】
以下に、図面を参照して、本発明の実施の形態のナビゲーションシステムの構成および作用について説明する。
【0029】
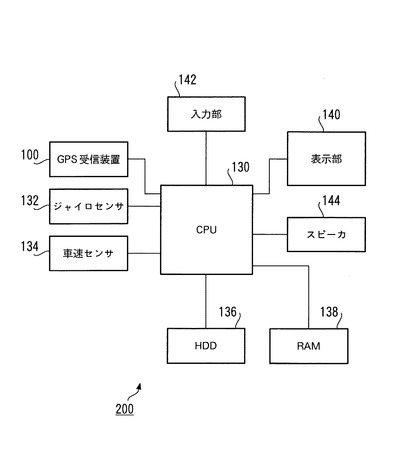
図1は、本発明の実施の形態のナビゲーションシステム200の構成を示したブロック図である。ナビゲーションシステム200は、車両(不図示)に搭載されたものであり、所望の経路案内情報をユーザに提供することができる。ナビゲーションシステム200は、GPS受信装置100、CPU(Central Processing Unit)130、ジャイロセンサ132、車速センサ134、HDD(Hard Disk Drive)136、RAM(Random Access Memory)138、表示部140、入力部142、およびスピーカ144を備えている。CPU130は、ナビゲーションシステム200全体の制御を統括して実行する。ナビゲーションシステム200の各構成要素はCPU130の制御下で各種機能を実現する。
【0030】
GPS受信装置100は、地球を周回する複数のGPS衛星の幾つかを捕捉・追尾する。そして、捕捉・追尾したGPS衛星からのGPS信号を用いて測位演算し、自己の現在位置、移動速度、方位等の前段推定情報等を含むGPS測位解を取得する。そして、GPS受信装置100は、取得したGPS測位解をCPU130に渡す。
【0031】
ジャイロセンサ132および車速センサ134は周知のDRセンサである。ジャイロセンサ132は、車両の水平面における方位に関する角速度を計測し、その計測結果をCPU130に出力する。車速センサ134は、車両の左右の駆動輪の回転速度を検出し、その平均速度に応じた車速パルス信号を生成してCPU130に出力する。なお、説明の便宜上、これらのセンサ出力を「DRセンサ出力」と記す。CPU130は、これらのDRセンサ出力を収集・演算し、位置、移動速度、方位等の前段推定情報を含むDR測位解を取得することができる(すなわち周知の自律航法を行うことができる)。
【0032】
HDD136は、ナビゲーションに利用する地図情報が蓄積された地図データベースや各種プログラム等が格納された記録媒体である。RAM138は、例えばHDD136に格納されているデータやプログラム等が一時的に展開されるメモリである。CPU130は、例えばHDD136に格納されているプログラムを読み出してRAM138の所定領域に展開して実行させる。これにより、例えばナビゲーション用のプログラムが動作してナビゲーション機能が実現される。
【0033】
なお、地図データベースは、例えばCD−ROMやDVD−ROM等の他の媒体に記憶されたものであっても良く、或いは、遠隔地に設置されたサーバに蓄積されたものであっても良い。後者の場合、ナビゲーションシステム200は、所定の通信手段(不図示)等によりネットワークを介してサーバにアクセスし、当該サーバから必要な地図情報をダウンロードしてナビゲーションに利用することができる。この場合、ナビゲーションシステム200は地図データベースを保有する必要がなくなる。
【0034】
表示部140は、例えばナビゲーション用画面等を表示するためのものである。この表示部140は、例えば感圧式又は静電式等の周知のタッチ・パネルであり、入力手段を兼ねている。入力部142は、ユーザ・オペレーションを成すためのものであり、例えばフロントパネル(不図示)に設置されたメカニカル式の入力キーである。例えば電源スイッチは入力部142を構成する一要素である。表示部140又は入力部142が操作されると、それに応じた信号がCPU130に入力する。そしてCPU130は、ユーザ・オペレーションに対応した処理が実行されるように各構成要素を制御する。スピーカ144は、例えば分岐地点での進行方向の報知等のナビゲーション用音声を出力する。
【0035】
CPU130は、GPS測位解による前段推定情報と、DR測位解に基づいて算出した前段推定情報とを併用して自己の位置、移動速度、方位等を推定し、地図データベースから得られる地図情報を用いてマップマッチングして最終的な推定情報をユーザに提示する。また、各データを用いてセンサ学習を継続的に実行し、DR測位解の精度を維持する。
【0036】
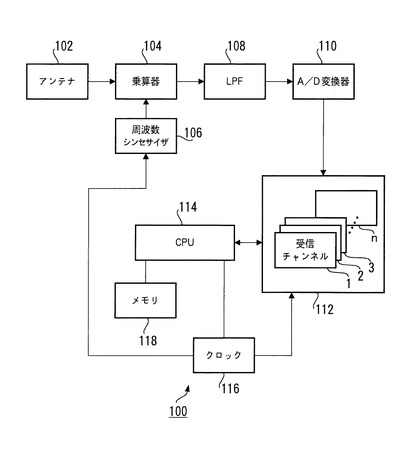
ここで、GPS受信装置100について詳説する。図2に、本発明の実施の形態のGPS受信装置100の構成をブロック図で示す。GPS受信装置100は、アンテナ102、乗算器104、周波数シンセサイザ106、LPF(Low Pass Filter)108、A/D(Analog / Digital)変換器110、DSP(Digital Signal Processor)112、CPU(Central Processing Unit)114、クロック116、およびメモリ118を備えている。
【0037】
GPS受信装置100は、各GPS衛星から発信されているGPS信号を受信して幾つかのGPS衛星を捕捉・追尾する。次いで、これらの捕捉・追尾状態のGPS衛星のGPS信号に含まれる航法メッセージ(エフェメリス、アルマナック等)を用いて測位演算し、GPS測位解を取得する。
【0038】
GPS衛星から発信されたGPS信号をアンテナ102が受信すると、その受信信号は、図示しない低雑音増幅器、所定周波数を通過させるフィルタ等を介することにより、GPS信号帯域外(例えば1.57542GHzと大きく異なる帯域)のノイズが減衰される。受信信号はノイズが減衰された後、乗算器104に入力される。
【0039】
乗算器104は、周波数シンセサイザ106の発振周波数に基づいて受信信号をダウンコンバートして、LPF108に出力する。なお、受信信号は、安定動作や選択特性が改善される中間周波数すなわちIF(Intermediate Frequency)信号に変換される。IF信号は、LPF108によってノイズが減衰された後、A/D変換器110に入力される。A/D変換器110は、IF信号をサンプリングしてデジタルIF信号に変換し、DSP112に出力する。
【0040】
ここで、GPS受信装置100が二次元測位を行うものである場合、捕捉・追尾すべきGPS衛星は少なくとも三機である。またGPS受信装置100が三次元測位を行うものである場合、捕捉・追尾すべきGPS衛星は少なくとも四機である。本実施形態ではGPS受信装置100は例えば三次元測位を行うものであるとする。すなわち本実施形態で捕捉・追尾すべきGPS衛星は少なくとも四機である。
【0041】
DSP112はn個の受信チャンネル1〜nを有している。GPS受信装置100において測位演算を行うためには、上述したように最低四機のGPS衛星を同時に捕捉・追尾する必要がある。このためDSP112には、通常、四つ以上に分配されたデジタルIF信号が入力される。これらの分配されたデジタルIF信号は、それぞれ別個の系統の回路で処理される必要がある。従って、DSP112は、各デジタルIF信号を処理して複数のGPS衛星を同時捕捉・追尾できるよう、受信チャンネルを複数有している。
【0042】
ここで、クロック116は一般に水晶振動子で構成されている。水晶振動子の発振周波数は、個体差による偏差を含み、周囲温度や経年変化の影響で変動し得る。このようなクロック116の誤差(偏差や変動)は、GPS測位解の精度に大きく影響する。従って、少なくとも四機のGPS衛星からのGPS信号は、各GPS衛星とGPS受信装置100との疑似距離を求めて当該GPS受信装置100の三次元位置を特定するためと、クロック116の誤差を補正するために用いられる。
【0043】
各受信チャンネルは、例えば受信可能なGPS信号全て(又はCPU114により指定されたGPS衛星から発信されているGPS信号)を捕捉・追尾して、航法メッセージや疑似距離、ドップラーシフト量等を取得する。CPU114は、これらのデータに基づいてGPS測位解を算出する。
【0044】
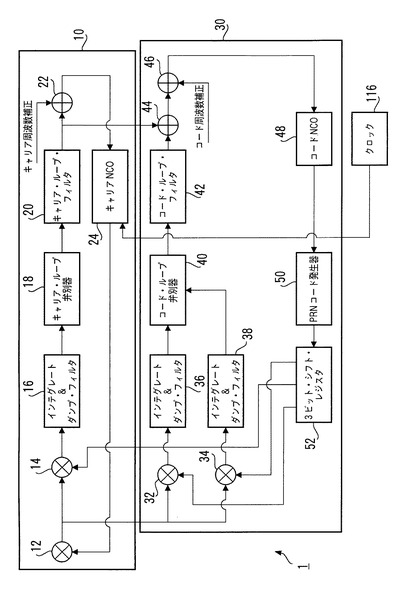
ここで、図3に、DSP112が有している受信チャンネル1の構成をブロックで示す。なお、各受信チャンネルは、全て同一に構成され、かつ同一の信号処理を行う。各受信チャンネルにおいて異なる点といえば、それぞれ別のGPS衛星から発信されたGPS信号(別の言い方をすると、それぞれ別のPRNコードで変調されたGPS信号)に対して信号処理を行うという点だけである。従って、受信チャンネル2〜nに対する詳細な説明は、受信チャンネル1の以下の詳細な説明をもってここでは省略する。
【0045】
受信チャンネル1は、キャリア・トラッキング・ループ10とコード・トラッキング・ループ30とに大別される。キャリア・トラッキング・ループ10は、PLL(Phase Lock Loop)で、キャリアをロックするための回路であり、乗算器12、14、インテグレート&ダンプ・フィルタ16、キャリア・ループ弁別器18、キャリア・ループ・フィルタ20、加算器22、およびキャリアNCO(Numerically Controlled Oscillator)24を有している。コード・トラッキング・ループ30は、DLL(Delay Lock Loop)で、コードをロックするための回路であり、乗算器32、34、インテグレート&ダンプ・フィルタ36、38、コード・ループ弁別器40、コード・ループ・フィルタ42、加算器44、46、コードNCO48、PRNコード発生器50、および3ビット・シフト・レジスタ52を有している。
【0046】
A/D変換器110から出力されたデジタルIF信号は、キャリア・トラッキング・ループ10の乗算器12に入力される。乗算器12は、キャリアNCO24から出力される再生キャリア信号に基づいてデジタルIF信号を直交復調し、I信号とQ信号に変換して出力する。なお、上記再生キャリア信号は、キャリアNCO24により生成される信号である。また、I(In-phase)信号は直交復調の際の同相成分である。また、Q(Quadra-phase)信号はI信号と直交関係にある成分である。本明細書では説明を簡単にするため、I信号とQ信号とをまとめて「IQ信号」と略記する。
【0047】
乗算器12から出力されたIQ信号は、乗算器14、および、コード・トラッキング・ループ30の乗算器32、34に入力される。乗算器14は、コード・トラッキング・ループ30の3ビット・シフト・レジスタ52から出力される再生コードPに基づいてIQ信号を逆拡散してベースバンド信号に復調し、インテグレート&ダンプ・フィルタ16に出力する。なお、上記再生コードPは、コード・トラッキング・ループ30(より正確には3ビット・シフト・レジスタ52)により生成される信号であり、PRNコードのリファレンスコードである。
【0048】
インテグレート&ダンプ・フィルタ16は、ベースバンド信号をインテグレートおよびダンプして、キャリア・ループ弁別器18に出力する。キャリア・ループ弁別器18は、入力信号を所定の電圧レベルに応じて弁別し、キャリア・ループ・フィルタ20に出力する。キャリア・ループ・フィルタ20は、入力信号に対して所定のフィルタリング処理を施して、それをNCO制御信号として、加算器22、および、コード・トラッキング・ループ30の加算器44に出力する。
【0049】
加算器22には、キャリア・ループ・フィルタ20からのNCO制御信号以外に、CPU114から出力されたキャリアの周波数を補正するための信号が入力される。加算器22は、これらの信号を加算して、キャリアNCO24に出力する。キャリアNCO24は上記の入力信号、クロック116からのクロック周波数に基づいて上記再生キャリア信号を生成し、乗算器12に出力する。
【0050】
また、乗算器32は、3ビット・シフト・レジスタ52から出力される再生コードEに基づいてIQ信号を逆拡散してベースバンド信号に復調し、インテグレート&ダンプ・フィルタ36に出力する。乗算器34は、3ビット・シフト・レジスタ52から出力される再生コードLに基づいてIQ信号を逆拡散してベースバンド信号に復調し、インテグレート&ダンプ・フィルタ38に出力する。なお、上記再生コードEおよびLは、3ビット・シフト・レジスタ52により生成される信号であり、PRNコードのリファレンスコードである。
【0051】
インテグレート&ダンプ・フィルタ36および38は、ベースバンド信号をインテグレートおよびダンプして、コード・ループ弁別器40に出力する。コード・ループ弁別器40は、入力信号を所定の電圧レベルに応じて弁別し、コード・ループ・フィルタ42に出力する。コード・ループ・フィルタ42は、入力信号に対して所定のフィルタリング処理を施して、加算器44に出力する。
【0052】
加算器44は、キャリア・ループ・フィルタ20から出力されたNCO制御信号と、コード・ループ・フィルタ42から出力された信号とを加算して加算器46に出力する。加算器46には、加算器44からの信号以外に、CPU114から出力された再生コードの周波数を補正するための信号が入力される。加算器46はこれらの信号を加算して、コードNCO48に出力する。コードNCO48はクロック116からのクロック周波数に基づいて動作し、加算器46からの入力信号に所定の処理を施してそれをPRNコード発生器50に出力する。PRNコード発生器50は、GPS信号と相関性のあるコードを発生させて3ビット・シフト・レジスタ52に出力する。3ビット・シフト・レジスタ52は、入力信号に基づいて上記再生コードP、E、L(すなわちPRNコードのリファレンスコード)を作成して、それぞれを乗算器14、32、34に出力する。
【0053】
キャリア・トラッキング・ループ10における上述した一連の処理が行われることにより、GPS信号のPRNコードが取得される。加えて、コード・トラッキング・ループ30における上述した一連の処理が行われることにより、上記PRNコードと、受信チャンネル1で生成された各再生コード信号とが位相同期されて、航法メッセージが取得される。また更に、受信チャンネル1は、図示しない算出手段により、航法メッセージに基づいて、GPS衛星の座標、ドップラーシフト量、キャリア周波数(疑似距離レート)、キャリア位相、GPS受信装置100におけるGPSタイムラグ等を算出する。
【0054】
コード・トラッキング・ループ30でのGPS信号のPRNコードとの同期処理を行う過程において、GPS衛星からGPS受信装置100までのGPS信号の伝搬時間が取得される。受信チャンネル1は、GPS衛星の座標と伝搬時間とに基づいてGPS衛星とGPS受信装置100との疑似距離を算出し、CPU114に出力する。
【0055】
例えばGPS衛星iの疑似距離riは以下の式(1)で表される。三次元測位では式(1)に示されるように未知のパラメータが四つ存在するため、捕捉・追尾すべきGPS衛星が少なくとも四機必要となる。
【数1】

ただし、GPS衛星iの位置座標を(xi、yi、zi)、GPS受信装置100の位置座標を(x、y、z)、「c」を光の速度、「δ」をクロック116の誤差を除去するためのクロック・オフセット値とする。
【0056】
CPU114は、各受信チャンネルで取得された航法メッセージに基づいて算出された各測定値やデータ、疑似距離等により、自己の現在位置、移動速度、方位等の前段推定情報等を含むGPS測位解を算出してCPU130に渡す。CPU114は、例えば航法メッセージに基づいて算出された少なくとも四つの疑似距離に基づいて上記式(1)を解き、自己の現在位置を算出する。上記式(1)は非線形の連立方程式であるため、通常は適当な初期値を用いて線形化を行い、ニュートン・ラフソン法により解を求める。
【0057】
なお、二次元測位の場合は高度を既知と仮定する。従って、少なくとも三機のGPS衛星を捕捉・追尾するだけで自己の現在位置情報を算出することができる。また、五機以上のGPS衛星を捕捉・追尾して測位に利用する場合は、GPS衛星の数が未知のパラメータの数よりも多くなる。このため最小二乗法を用いて上記式を解くことができる。従って、より正確な解を得ることが可能となる。
【0058】
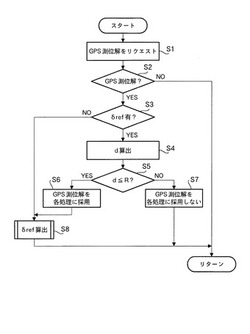
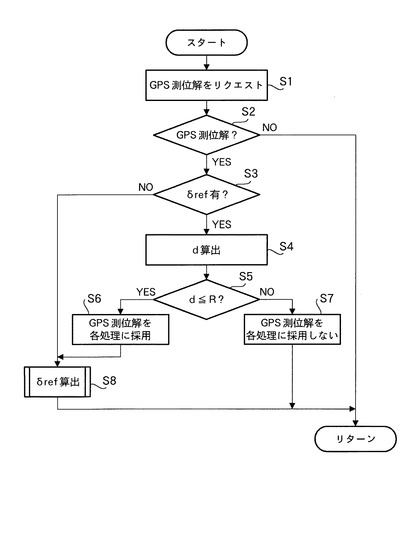
ここで、上述したようにマルチパスやCWノイズ等の影響で受信状態が悪化した場合、取得されるGPS測位解(例えば疑似距離等)に誤差が含まれる。このため、前段推定情報の精度低下およびセンサ学習の劣化が起こり得る。本実施形態では、図4に示されたフローチャートの処理により、マルチパスやCWノイズ等の影響による上記誤差を検知して、前段推定情報の精度低下およびセンサ学習の劣化を軽減することができる。
【0059】
例えばユーザにより電源(不図示)がオンされてナビゲーションシステム200が起動すると、CPU130は、GPS受信装置100に対してGPS測位解をリクエストする。そして、そのレスポンスを待機する(ステップ1、以下、明細書及び図面においてステップを「S」と略記)。
【0060】
GPS受信装置100は、例えば1秒間に一回測位演算を試行し、上記リクエストに応じてその測位演算の結果をCPU130に渡す。GPS受信装置100は、四機以上のGPS衛星を捕捉・追尾できた場合には測位演算を行ってGPS測位解を得る。従って、GPS受信装置100は、四機以上のGPS衛星を捕捉・追尾できているときには、CPU130からのリクエストに応答してGPS測位解をCPU130に渡す。一方、GPS受信装置100は、三機以下のGPS衛星しか捕捉・追尾できない場合にはGPS測位解を得ることができない。従って、GPS受信装置100は、三機以下のGPS衛星しか捕捉・追尾できていないときには、CPU130からのリクエストに応答して非測位状態であることを報知する。
【0061】
S2の処理において、CPU130は、GPS受信装置100のレスポンスが非測位状態を示す報知信号であるときには(S2:NO)、以降の処理を実行できないため、図4のフローチャートをリターンする。これに対して、GPS受信装置100のレスポンスがGPS測位解であるときには(S2:YES)、S3の処理に進む。
【0062】
S3の処理において、CPU130は、クロック・オフセット基準値δrefが算出されているか否かを判定する。クロック・オフセット基準値δrefが算出されている場合(S3:YES)、CPU130はS4の処理に進む。また、クロック・オフセット基準値δrefが算出されていない場合(S3:NO)、CPU130はS8の処理に進む。
【0063】
S8の処理において、CPU130は、クロック・オフセット基準値δrefを算出する。ここで算出されるクロック・オフセット基準値δrefは、GPS測位解におけるマルチパスやCWノイズ等の影響の有無を判断するために用いる参照値である。
【0064】
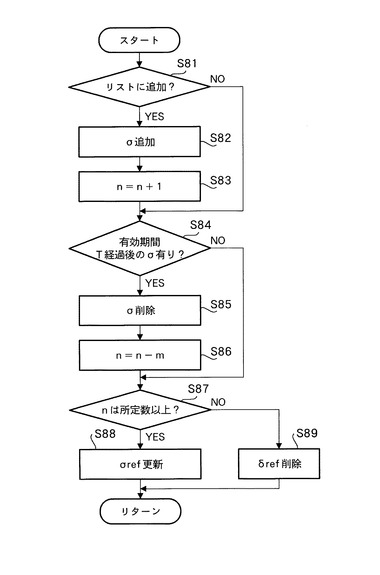
図5に、図4のS8の、クロック・オフセット基準値δrefを算出する処理のサブルーチンを示す。
【0065】
図5に示されるように、CPU130は、クロック・オフセット基準値δrefを算出するために、先ず、図4のS2の処理で取得したGPS測位解に含まれるクロック・オフセット値δをクロック・オフセット保存リストに追加するか否かを判定する(S81)。なお、CPU130は、例えば内部メモリ(不図示)の所定領域を使用してクロック・オフセット保存リストを作成・格納する。
【0066】
クロック・オフセット基準値δrefは、規定数以上のクロック・オフセット値δの平均値であって、以下の条件(A)および(B)を満たすクロック・オフセット値δの平均値である。
(A)良好な受信状態で取得されたクロック・オフセット値δ
(B)直近(一定の期間、例えば過去数秒間)で取得されたクロック・オフセット値δ
【0067】
従って、直近で取得されたGPS測位解に含まれるクロック・オフセット値δをクロック・オフセット保存リストに追加するか否かは、当該のクロック・オフセット値δが良好な受信状況下で得られたGPS測位解に含まれるものであるか否かによって決定される。
【0068】
GPS測位解は、例えば以下の条件(a)〜(e)を満たすものであるとき、良好な受信状況下で得られたものと判定される。
(a)DOPが規定値以下
(b)GPS測位解を得るために用いた各GPS信号のC/N値が規定値以上
(c)GPS測位解の推定移動速度と車速パルス信号による推定移動速度との差が規定値以内
(d)GPS測位解の推定位置とDRセンサ出力に基づく推定位置との差が規定値以内
(e)GPS測位解の推定方位とDRセンサ出力に基づく推定方位との差が規定値以内
なお、条件(a)のDOP、条件(b)のC/N値等の情報は、GPS受信装置100が受信したGPS信号に基づいて取得する情報であり、例えばGPS測位解と共にGPS受信装置100からCPU130に渡される。また、条件(d)の「DRセンサ出力に基づく推定位置」とは、CPU130が、直前のマップマッチング後の推定位置に対して、車速パルス信号により得られる走行距離およびジャイロセンサ132により得られる方位変化を加えて暫定的な位置を算出し、当該の暫定位置にマップマッチングを適用して得られる推定位置である。また、条件(e)の「DRセンサ出力に基づく推定方位」とは、CPU130が、直前のマップマッチング後の推定方位に対して、車速パルス信号により得られる走行距離およびジャイロセンサ132により得られる方位変化を加えて暫定的な方位を算出し、当該の暫定方位にマップマッチングを適用して得られる推定方位である。条件(c)〜(e)は、センサ学習がある程度継続し、パラメータ(例えば「GPS測位解の推定移動速度」や「直前のマップマッチング後の推定位置」等)の信頼性がある程度高い状態であるときに適用されるものであるとする。また、条件(a)〜(e)において「規定値」という同一の文言を用いているが、各条件における「規定値」は、それぞれの条件に合わせて適宜設定された値であり、典型的には同一の値を示すものではなくそれぞれ異なる値であり得る。
【0069】
S81の処理において、CPU130は、条件(a)〜(e)の全てが満たされる場合、図4のS2の処理で取得されたクロック・オフセット値δが良好な受信状況下で得られたGPS測位解に含まれるものであり、誤差の少ない値であると判定して(S81:YES)、S82の処理に進む。
【0070】
S82の処理において、CPU130は、クロック・オフセット値δをクロック・オフセット保存リストに追加(すなわち内部メモリの所定領域に保存)する。また、追加するクロック・オフセット値δに関連付けて、GPS受信装置100が測位を行った時刻情報も追加する。この時刻情報は、GPS測位解算出時にGPS受信装置100が取得する情報であり、例えばGPS測位解と共にGPS受信装置100からCPU130に渡される。
【0071】
CPU130は、クロック・オフセット値δのリスト追加に次いで、変数nを1インクリメントし(S83)、S84の処理に進む。この変数nは、クロック・オフセット保存リストに含まれるクロック・オフセット値δの数を表すものである。変数nは、図4のS8の処理がナビゲーションシステム200起動後に初めて実行される場合に限り、当該のS8の処理開始時に0にリセットされる。
【0072】
また、S81の処理において、CPU130は、条件(a)〜(e)の何れかが満たされない場合、当該のクロック・オフセット値δがマルチパスやCWノイズ等の影響を受けたGPS測位解に含まれるものであり、比較的大きな誤差を含むと判定する(S81:NO)。そして、そのクロック・オフセット値δをクロック・オフセット保存リストに追加することなくS84の処理に進む。
【0073】
S84の処理において、CPU130は、クロック・オフセット保存リスト中の各時刻情報を参照して、当該リストに追加されてから一定の期間(「有効期間T」とする)が経過したクロック・オフセット値δがあるか否かを判定する。リスト追加後に有効期間Tが経過したクロック・オフセット値δがある場合(S84:YES)、CPU130は、そのクロック・オフセット値δが直近のデータでなく信頼性が低いものとして削除する(S85)。次いで、変数nからmを減算して(S86)、S87の処理に進む。なお、「m」は、S85の処理で削除されたクロック・オフセット値δの数を表す。また、リスト追加後に有効期間Tが経過したクロック・オフセット値δがない場合(S84:NO)、CPU130は、リスト中の各クロック・オフセット値δが直近のデータであり信頼性が高いものであるとして、それらを削除することなくS87の処理に進む。
【0074】
ここで、クロック・オフセット保存リストに追加されてから有効期間Tが経過してないクロック・オフセット値δの信頼性が高い理由について説明を加える。クロック116の水晶振動子の振動周波数の偏差は、周辺温度に依存して変化する。また、経時的にも変化する。しかし、GPS受信装置は、一般にシールドケース等により外気と遮断されている。また、ハウジング内部に実装されているため、クロック116は、温度変化を受け難い環境にあると言える。従って、温度変化による上記偏差の変化は、短期間(ここでは「有効期間T」)では実質的に起こらない。また、経時変化も短期間では無視することができる。これらの観点から、直近のデータ(すなわちリスト追加後に有効期間Tが経過していないデータ)の信頼性が高いと言える。
【0075】
S87の処理において、CPU130は、変数nが所定数以上であるか否かを判定する。変数nが所定数以上である場合(S87:YES)、CPU130は、精度の高いクロック・オフセット基準値δrefを算出できる程度のサンプリング数が収集できたとして、下記式(2)に基づいてクロック・オフセット基準値δrefを算出し、内部メモリのクロック・オフセット基準値δrefを更新する(S88)。そして、図5のサブルーチンをリターンし、図4のS1の処理に復帰する。また、変数nが所定数未満である場合(S87:NO)、CPU130は、オフセット基準値δrefを算出することなく、図5のサブルーチンをリターンして図4のS1の処理に復帰する。また、前回のオフセット基準値δrefが内部メモリに保存されている場合にはそれを消去(或いは、当該のオフセット基準値δrefを無効データとして扱うように)する。
【数2】
【0076】
ここで、図4のフローチャートの説明に戻る。S4の処理において、CPU130は、GPS測位解におけるマルチパスやCWノイズ等の影響の有無を判断するために、図8の処理で算出されたクロック・オフセット基準値δrefと、S2の処理で取得されたクロック・オフセット値δとの差の絶対値dを算出する(S4)。
【0077】
次に、CPU130は、算出された絶対値dが所定値R以下か否かを判定する(S5)。絶対値dが所定値R以下の場合(S5:YES)、信頼性の高いクロック・オフセット基準値δrefと、S2の処理で取得されたクロック・オフセット値δとの乖離が小さい。この場合、GPS測位解がマルチパスやCWノイズ等の影響を受けたものでない(或いは、軽微な影響しか受けていないものである)ことを意味する。従って、CPU130は、S6の処理に進み、当該GPS測位解の前段推定情報が精度の高い情報であると判断する。そして、当該のGPS測位解を、最終的な推定情報を取得するための演算処理に採用する。すなわち、CPU130は、GPS測位解とDR測位解を併用し、かつマップマッチングを行って推定情報を取得し、それをユーザに提示する。また、当該のGPS測位解を用いてセンサ学習を実行し、DR測位解の精度向上を図る。CPU130は、S6の処理後、図4のフローチャートをリターンする。
【0078】
これに対して絶対値dが所定値Rよりも大きい場合(S5:NO)、信頼性の高いクロック・オフセット基準値δrefと、S2の処理で算出されたクロック・オフセット値δとの乖離が大きい。この場合、GPS測位解がマルチパスやCWノイズ等の影響を受けたものであることを意味する。従って、CPU130は、S7の処理に進み、当該GPS測位解の前段推定情報が精度の低い情報であると判断する。そして、当該のGPS測位解を、最終的な推定情報を取得するための演算処理に採用しない。すなわち、CPU130は、DR測位解による前段推定情報とマップマッチングに基づいて得られる推定情報をユーザに提示する。また、精度の低いGPS測位解を用いたセンサ学習によってDR測位解の精度が低下するのを防止するため、当該のGPS測位解をセンサ学習に採用しない。CPU130は、S7の処理後、図4のフローチャートをリターンする。
【0079】
すなわち本実施形態のナビゲーションシステム200によれば、マルチパスやCWノイズ等の影響を受けてないGPS測位解を最終的な推定情報の取得およびセンサ学習に採用し、上記影響を受けた精度の低いGPS測位解を最終的な推定情報の取得およびセンサ学習に採用しないように動作する。これにより、最終的な推定情報の精度が低下し難くなり、かつセンサ学習も劣化しないという効果が得られる。
【0080】
以上が本発明の実施の形態である。本発明はこれらの実施の形態に限定されるものではなく様々な範囲で変形が可能である。例えばS81の処理において、CPU130は、条件(a)〜(e)のうち少なくとも1つが満たされている場合に、そのクロック・オフセット値δが誤差の少ない値であると判定するようにしても良い。附言するに、S81の処理における判定基準は種々あり、想定されるあらゆる条件の組み合わせを適用することが可能である。また、その条件も(a)〜(e)に限定されず、他にも様々なものが想定される。
【図面の簡単な説明】
【0081】
【図1】本発明の実施の形態のナビゲーションシステムの構成を示したブロック図である。
【図2】本発明の実施の形態のGPS受信装置の構成を示したブロック図である。
【図3】本発明の実施の形態のGPS受信装置に備えられたDSPが有している受信チャンネルの構成を示したブロック図である。
【図4】本発明の実施の形態で実行される、前段推定情報の精度低下およびセンサ学習の劣化を軽減するための処理を示したフローチャートである。
【図5】図4のS8のクロック・オフセット基準値δrefを算出する処理のサブルーチンである。
【符号の説明】
【0082】
1〜n 受信チャンネル
100 GPS受信装置
116 クロック
130 CPU
132 車速センサ
134 ジャイロセンサ
200 ナビゲーションシステム
【技術分野】
【0001】
この発明は、複数のGPS(Global Positioning System)衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得手段を有し、当該の測位の過程で得られるクロック・オフセット値に基づいて当該のGPS測位解の精度を判断するナビゲーションシステム、およびGPS測位解精度判定方法に関する。
【背景技術】
【0002】
車両には、自己の位置、移動速度、方位等を推定することが可能なナビゲーションシステムが実装されている。このようなナビゲーションシステムには、例えばGPS受信装置、DR(Dead Reckoning)センサ、地図データベース等が備えられている。ナビゲーションシステムは、GPS受信装置による測位解(以下、「GPS測位解」と記す)とDRセンサによる測位解(以下、「DR測位解」と記す)とを併用して自己の位置、移動速度、方位等を推定し、更に、地図データベースから得られる地図情報を用いてマップマッチングして最終的な推定情報をユーザに提示する。例えば下記特許文献1にこのようなナビゲーションシステムの一例が開示されている。なお、説明の便宜上、以降は、各測位解に含まれる推定情報、および測位解を併用した結果得られる推定情報を「前段推定情報」と記し、マップマッチングして得られる最終的な推定情報を「推定情報」と記す。
【0003】
上記DRセンサには、例えば車速センサやジャイロセンサ等が含まれる。車速センサは、車両の左右の駆動輪の回転速度を検出してその平均速度に応じた車速パルス信号を生成する。ジャイロセンサは、車両の方位に関する角速度を計測する。
【0004】
ここで、車速パルス信号が1パルス出力される毎に車両が進む距離(以下、「距離係数」と記す)は、車種、タイヤ径、車両重量、路面状態等で変動する。このような距離係数の変動は、DR測位解を劣化させる要因となる。このため、距離係数の変動は、GPS測位解、ジャイロセンサの出力、地図情報等に基づいて逐次校正される。また、ジャイロセンサの感度は、個体差や取り付け誤差によってばらつく。また、そのバイアスも個体差や周囲温度によってばらつく。このようなばらつきは、先と同様にDR測位解を劣化させる要因となる。このため、これらのばらつきは、GPS測位解、車速パルス信号、地図情報等に基づいて逐次校正される。このように、ナビゲーションシステムは、距離係数やジャイロセンサの感度およびバイアスを補正・学習しながら位置、移動速度、方位等を推定している。以下、説明の便宜上、ナビゲーションシステムのこのような動作を「センサ学習」と記す。
【0005】
ナビゲーションシステムは、上述のようにGPS測位解とDR測位解とを併用する場合、互いを比較して演算を行い、その結果に基づいて位置、移動速度、方位等を推定する。この場合、前段推定情報のサンプリングが複数あることから、一方の測位解による前段推定情報よりも精度の高い前段推定情報を得ることができる。このような観点から、GPS測位解とDR測位解とを常に併用して位置、移動速度、方位等を推定することが望ましい。
【0006】
しかし、車両は移動するため、ナビゲーションシステムを取り巻く環境も種々変化する。従って、ナビゲーションシステムの環境によっては、受信するGPS信号のノイズ等が混入してGPS測位解に誤差が生じることがある。このような場合、前段推定情報の精度が低下し、かつセンサ学習も劣化するという不都合がある。
【0007】
上記不都合を回避するため、例えば前段推定情報の算出やセンサ学習にGPS測位解を採用するか否かを、そのときのDOP(Dilution of Precision)に基づいて判断する方法がある。GPS測位解の精度はGPS衛星の幾何学的な配置に依存するため、ナビゲーションシステムは、例えばDOPが高いときにはGPS測位解に誤差が含まれているものとみなし、当該のGPS測位解を前段推定情報の算出やセンサ学習に用いないように動作する。精度の低いGPS測位解を前段推定情報の算出やセンサ学習に採用しないことにより、前段推定情報の精度低下やセンサ学習の劣化が軽減される。
【特許文献1】特開平11−190771号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ここで、上記の如きナビゲーションシステムは車両に搭載されたものであることから、GPS受信装置で受信されるGPS信号は、マルチパスやCW(continuous wave)ノイズ等の影響を受け易い。なお、マルチパスとは、GPS衛星からのGPS信号が高層ビル等の障害物で反射された後にGPS受信装置に受信され、その伝搬時間に誤差が生じる現象である。また、ここでのCWノイズは、その周波数成分がGPS信号のキャリア周波数に近いものであり、例えばGPS受信装置に近接して設置された電子機器からの不要輻射である。ここでいう電子機器には、例えばナビゲーションシステムに備えられたGPS受信装置以外の構成要素や、ナビゲーションシステムに近接して設置された車両の構成要素等が含まれる。
【0009】
GPS信号が上記マルチパスやCWノイズの影響を受けると、それによって得られるGPS測位解が誤差を含むものとなる。従って、先の説明と同様に、上述した不都合を回避するため、当該のGPS測位解を前段推定情報の算出やセンサ学習に採用すべきではない。ところが、マルチパスやCWノイズは、DOPとは無関係にGPS信号に影響を及ぼす。従って、例えばGPS信号がマルチパスやCWノイズの影響を受けている状態であってもDOPが低いことがある。この場合、GPS受信装置は、誤差を含むGPS測位解を排除することができず、前段推定情報の算出やセンサ学習に採用してしまうことがある。この結果、結局は、前段推定情報の精度が低下し、かつセンサ学習が劣化してしまう。
【0010】
そこで、本発明は上記の事情に鑑みて、前段推定情報の精度低下やセンサ学習の劣化等を軽減するため、マルチパスやCWノイズ等の影響によるGPS測位解の精度低下を検知するのに好適なナビゲーションシステムおよびGPS測位解精度判定方法を提供することを課題としている。
【課題を解決するための手段】
【0011】
上記の課題を解決する本発明の一態様に係るナビゲーションシステムは、複数のGPS衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得手段を有し、当該のGPS測位解の精度を判断するシステムである。このナビゲーションシステムは、自律航法のための自律航法情報を出力する情報出力手段と、該出力された自律航法情報と該GPS測位解との比較結果に基づいて所定の参照値を算出する参照値算出手段と、該算出された所定の参照値と、該測位の過程で得られるクロック・オフセット値との差分を算出する差分算出手段とを具備し、該算出される差分に基づいて該GPS測位解の精度を判断することを特徴としたものである。
【0012】
このように構成されたナビゲーションシステムによれば、例えばマルチパスやCWノイズ等の影響を受けたGPS測位解を検知することができる。このため、検知されたGPS測位解を推定情報の算出および自律航法情報の校正に用いないようにすることができ、結果、推定情報の精度低下やセンサ学習の劣化等を防ぐことが可能となる。
【0013】
上記ナビゲーションシステムは、例えば該クロック・オフセット値が所定の条件を満たすか否かを判定する条件判定手段と、該所定の条件を満たすと判定されたクロック・オフセット値を収集するクロック・オフセット値収集手段とを更に具備したものであっても良い。この場合、上記参照値算出手段は、例えば該収集されたクロック・オフセット値に基づいて該所定の参照値を算出する。
【0014】
上記該所定の条件に、例えば
(A)良好な受信状態で取得されたこと、
(B)所定の期間内に取得されたこと、
の少なくとも1つが含まれていても良い。
【0015】
上記条件判定手段は、例えば該GPS測位解と該自律航法情報に基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定する構成であっても良い。
【0016】
上記自律航法情報は、例えば該移動体の移動速度を示す車速パルスを含むものであっても良く、この場合、上記条件判定手段は、該GPS測位解に含まれる推定移動速度と該車速パルスに基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定する構成であっても良い。
【0017】
また、上記自律航法情報は、該移動体の方位を示す方位信号を更に含むものであっても良く、この場合、上記条件判定手段は、該GPS測位解に含まれる推定位置又は方位と、該車速パルスおよび該方位信号に基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定する構成であっても良い。
【0018】
また、上記クロック・オフセット値収集手段は、例えば収集してから該所定の期間を経過したクロック・オフセット値を消去しても良い。
【0019】
また、上記の課題を解決する本発明の一態様に係る、GPS測位解の精度を判断するGPS測位解精度判定方法は、複数のGPS衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得ステップと、自律航法のための自律航法情報を取得するステップと、該取得された自律航法情報と該GPS測位解との比較結果に基づいて所定の参照値を算出する参照値算出ステップと、該算出された所定の参照値と、該測位の過程で得られるクロック・オフセット値との差分を算出する差分算出ステップと、該算出される差分に基づいて該GPS測位解の精度を判断する精度判断ステップとを含む。
【0020】
このようなGPS測位解精度判定方法によれば、例えばマルチパスやCWノイズ等の影響を受けたGPS測位解を検知することができる。このため、検知されたGPS測位解を推定情報の算出および自律航法情報の校正に用いないようにすることができ、結果、推定情報の精度低下やセンサ学習の劣化等を防ぐことが可能となる。
【0021】
また、上記GPS測位解精度判定方法は、例えば該クロック・オフセット値が所定の条件を満たすか否かを判定する条件判定ステップと、該所定の条件を満たすと判定されたクロック・オフセット値を収集するクロック・オフセット値収集ステップとを更に含むものであっても良い。この場合、上記参照値算出ステップにおいて、該収集されたクロック・オフセット値に基づいて該所定の参照値が算出される。
【0022】
上記該所定の条件に、例えば
(A)良好な受信状態で取得されたこと、
(B)所定の期間内に取得されたこと、
の少なくとも1つが含まれていても良い。
【0023】
上記条件判定ステップにおいて、該GPS測位解と該自律航法情報に基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定しても良い。
【0024】
また、該自律航法情報に該移動体の移動速度を示す車速パルスが含まれるとき、上記条件判定ステップにおいて、該GPS測位解に含まれる推定移動速度と該車速パルスに基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定しても良い。
【0025】
また、該自律航法情報に該移動体の方位を示す方位信号が含まれるとき、条件判定ステップにおいて、該GPS測位解に含まれる推定位置又は方位と、該車速パルスおよび該方位信号に基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定しても良い。
【0026】
また、上記クロック・オフセット値収集ステップにおいて、収集してから該所定の期間を経過したクロック・オフセット値を消去しても良い。
【発明の効果】
【0027】
本発明に係るナビゲーションシステムおよびGPS測位解精度判定方法によれば、例えばマルチパスやCWノイズ等の影響を受けたGPS測位解を検知することができる。このため、検知されたGPS測位解を推定情報の算出および自律航法情報の校正に用いないようにすることができ、結果、推定情報の精度低下やセンサ学習の劣化等を防ぐことが可能となる。
【発明を実施するための最良の形態】
【0028】
以下に、図面を参照して、本発明の実施の形態のナビゲーションシステムの構成および作用について説明する。
【0029】
図1は、本発明の実施の形態のナビゲーションシステム200の構成を示したブロック図である。ナビゲーションシステム200は、車両(不図示)に搭載されたものであり、所望の経路案内情報をユーザに提供することができる。ナビゲーションシステム200は、GPS受信装置100、CPU(Central Processing Unit)130、ジャイロセンサ132、車速センサ134、HDD(Hard Disk Drive)136、RAM(Random Access Memory)138、表示部140、入力部142、およびスピーカ144を備えている。CPU130は、ナビゲーションシステム200全体の制御を統括して実行する。ナビゲーションシステム200の各構成要素はCPU130の制御下で各種機能を実現する。
【0030】
GPS受信装置100は、地球を周回する複数のGPS衛星の幾つかを捕捉・追尾する。そして、捕捉・追尾したGPS衛星からのGPS信号を用いて測位演算し、自己の現在位置、移動速度、方位等の前段推定情報等を含むGPS測位解を取得する。そして、GPS受信装置100は、取得したGPS測位解をCPU130に渡す。
【0031】
ジャイロセンサ132および車速センサ134は周知のDRセンサである。ジャイロセンサ132は、車両の水平面における方位に関する角速度を計測し、その計測結果をCPU130に出力する。車速センサ134は、車両の左右の駆動輪の回転速度を検出し、その平均速度に応じた車速パルス信号を生成してCPU130に出力する。なお、説明の便宜上、これらのセンサ出力を「DRセンサ出力」と記す。CPU130は、これらのDRセンサ出力を収集・演算し、位置、移動速度、方位等の前段推定情報を含むDR測位解を取得することができる(すなわち周知の自律航法を行うことができる)。
【0032】
HDD136は、ナビゲーションに利用する地図情報が蓄積された地図データベースや各種プログラム等が格納された記録媒体である。RAM138は、例えばHDD136に格納されているデータやプログラム等が一時的に展開されるメモリである。CPU130は、例えばHDD136に格納されているプログラムを読み出してRAM138の所定領域に展開して実行させる。これにより、例えばナビゲーション用のプログラムが動作してナビゲーション機能が実現される。
【0033】
なお、地図データベースは、例えばCD−ROMやDVD−ROM等の他の媒体に記憶されたものであっても良く、或いは、遠隔地に設置されたサーバに蓄積されたものであっても良い。後者の場合、ナビゲーションシステム200は、所定の通信手段(不図示)等によりネットワークを介してサーバにアクセスし、当該サーバから必要な地図情報をダウンロードしてナビゲーションに利用することができる。この場合、ナビゲーションシステム200は地図データベースを保有する必要がなくなる。
【0034】
表示部140は、例えばナビゲーション用画面等を表示するためのものである。この表示部140は、例えば感圧式又は静電式等の周知のタッチ・パネルであり、入力手段を兼ねている。入力部142は、ユーザ・オペレーションを成すためのものであり、例えばフロントパネル(不図示)に設置されたメカニカル式の入力キーである。例えば電源スイッチは入力部142を構成する一要素である。表示部140又は入力部142が操作されると、それに応じた信号がCPU130に入力する。そしてCPU130は、ユーザ・オペレーションに対応した処理が実行されるように各構成要素を制御する。スピーカ144は、例えば分岐地点での進行方向の報知等のナビゲーション用音声を出力する。
【0035】
CPU130は、GPS測位解による前段推定情報と、DR測位解に基づいて算出した前段推定情報とを併用して自己の位置、移動速度、方位等を推定し、地図データベースから得られる地図情報を用いてマップマッチングして最終的な推定情報をユーザに提示する。また、各データを用いてセンサ学習を継続的に実行し、DR測位解の精度を維持する。
【0036】
ここで、GPS受信装置100について詳説する。図2に、本発明の実施の形態のGPS受信装置100の構成をブロック図で示す。GPS受信装置100は、アンテナ102、乗算器104、周波数シンセサイザ106、LPF(Low Pass Filter)108、A/D(Analog / Digital)変換器110、DSP(Digital Signal Processor)112、CPU(Central Processing Unit)114、クロック116、およびメモリ118を備えている。
【0037】
GPS受信装置100は、各GPS衛星から発信されているGPS信号を受信して幾つかのGPS衛星を捕捉・追尾する。次いで、これらの捕捉・追尾状態のGPS衛星のGPS信号に含まれる航法メッセージ(エフェメリス、アルマナック等)を用いて測位演算し、GPS測位解を取得する。
【0038】
GPS衛星から発信されたGPS信号をアンテナ102が受信すると、その受信信号は、図示しない低雑音増幅器、所定周波数を通過させるフィルタ等を介することにより、GPS信号帯域外(例えば1.57542GHzと大きく異なる帯域)のノイズが減衰される。受信信号はノイズが減衰された後、乗算器104に入力される。
【0039】
乗算器104は、周波数シンセサイザ106の発振周波数に基づいて受信信号をダウンコンバートして、LPF108に出力する。なお、受信信号は、安定動作や選択特性が改善される中間周波数すなわちIF(Intermediate Frequency)信号に変換される。IF信号は、LPF108によってノイズが減衰された後、A/D変換器110に入力される。A/D変換器110は、IF信号をサンプリングしてデジタルIF信号に変換し、DSP112に出力する。
【0040】
ここで、GPS受信装置100が二次元測位を行うものである場合、捕捉・追尾すべきGPS衛星は少なくとも三機である。またGPS受信装置100が三次元測位を行うものである場合、捕捉・追尾すべきGPS衛星は少なくとも四機である。本実施形態ではGPS受信装置100は例えば三次元測位を行うものであるとする。すなわち本実施形態で捕捉・追尾すべきGPS衛星は少なくとも四機である。
【0041】
DSP112はn個の受信チャンネル1〜nを有している。GPS受信装置100において測位演算を行うためには、上述したように最低四機のGPS衛星を同時に捕捉・追尾する必要がある。このためDSP112には、通常、四つ以上に分配されたデジタルIF信号が入力される。これらの分配されたデジタルIF信号は、それぞれ別個の系統の回路で処理される必要がある。従って、DSP112は、各デジタルIF信号を処理して複数のGPS衛星を同時捕捉・追尾できるよう、受信チャンネルを複数有している。
【0042】
ここで、クロック116は一般に水晶振動子で構成されている。水晶振動子の発振周波数は、個体差による偏差を含み、周囲温度や経年変化の影響で変動し得る。このようなクロック116の誤差(偏差や変動)は、GPS測位解の精度に大きく影響する。従って、少なくとも四機のGPS衛星からのGPS信号は、各GPS衛星とGPS受信装置100との疑似距離を求めて当該GPS受信装置100の三次元位置を特定するためと、クロック116の誤差を補正するために用いられる。
【0043】
各受信チャンネルは、例えば受信可能なGPS信号全て(又はCPU114により指定されたGPS衛星から発信されているGPS信号)を捕捉・追尾して、航法メッセージや疑似距離、ドップラーシフト量等を取得する。CPU114は、これらのデータに基づいてGPS測位解を算出する。
【0044】
ここで、図3に、DSP112が有している受信チャンネル1の構成をブロックで示す。なお、各受信チャンネルは、全て同一に構成され、かつ同一の信号処理を行う。各受信チャンネルにおいて異なる点といえば、それぞれ別のGPS衛星から発信されたGPS信号(別の言い方をすると、それぞれ別のPRNコードで変調されたGPS信号)に対して信号処理を行うという点だけである。従って、受信チャンネル2〜nに対する詳細な説明は、受信チャンネル1の以下の詳細な説明をもってここでは省略する。
【0045】
受信チャンネル1は、キャリア・トラッキング・ループ10とコード・トラッキング・ループ30とに大別される。キャリア・トラッキング・ループ10は、PLL(Phase Lock Loop)で、キャリアをロックするための回路であり、乗算器12、14、インテグレート&ダンプ・フィルタ16、キャリア・ループ弁別器18、キャリア・ループ・フィルタ20、加算器22、およびキャリアNCO(Numerically Controlled Oscillator)24を有している。コード・トラッキング・ループ30は、DLL(Delay Lock Loop)で、コードをロックするための回路であり、乗算器32、34、インテグレート&ダンプ・フィルタ36、38、コード・ループ弁別器40、コード・ループ・フィルタ42、加算器44、46、コードNCO48、PRNコード発生器50、および3ビット・シフト・レジスタ52を有している。
【0046】
A/D変換器110から出力されたデジタルIF信号は、キャリア・トラッキング・ループ10の乗算器12に入力される。乗算器12は、キャリアNCO24から出力される再生キャリア信号に基づいてデジタルIF信号を直交復調し、I信号とQ信号に変換して出力する。なお、上記再生キャリア信号は、キャリアNCO24により生成される信号である。また、I(In-phase)信号は直交復調の際の同相成分である。また、Q(Quadra-phase)信号はI信号と直交関係にある成分である。本明細書では説明を簡単にするため、I信号とQ信号とをまとめて「IQ信号」と略記する。
【0047】
乗算器12から出力されたIQ信号は、乗算器14、および、コード・トラッキング・ループ30の乗算器32、34に入力される。乗算器14は、コード・トラッキング・ループ30の3ビット・シフト・レジスタ52から出力される再生コードPに基づいてIQ信号を逆拡散してベースバンド信号に復調し、インテグレート&ダンプ・フィルタ16に出力する。なお、上記再生コードPは、コード・トラッキング・ループ30(より正確には3ビット・シフト・レジスタ52)により生成される信号であり、PRNコードのリファレンスコードである。
【0048】
インテグレート&ダンプ・フィルタ16は、ベースバンド信号をインテグレートおよびダンプして、キャリア・ループ弁別器18に出力する。キャリア・ループ弁別器18は、入力信号を所定の電圧レベルに応じて弁別し、キャリア・ループ・フィルタ20に出力する。キャリア・ループ・フィルタ20は、入力信号に対して所定のフィルタリング処理を施して、それをNCO制御信号として、加算器22、および、コード・トラッキング・ループ30の加算器44に出力する。
【0049】
加算器22には、キャリア・ループ・フィルタ20からのNCO制御信号以外に、CPU114から出力されたキャリアの周波数を補正するための信号が入力される。加算器22は、これらの信号を加算して、キャリアNCO24に出力する。キャリアNCO24は上記の入力信号、クロック116からのクロック周波数に基づいて上記再生キャリア信号を生成し、乗算器12に出力する。
【0050】
また、乗算器32は、3ビット・シフト・レジスタ52から出力される再生コードEに基づいてIQ信号を逆拡散してベースバンド信号に復調し、インテグレート&ダンプ・フィルタ36に出力する。乗算器34は、3ビット・シフト・レジスタ52から出力される再生コードLに基づいてIQ信号を逆拡散してベースバンド信号に復調し、インテグレート&ダンプ・フィルタ38に出力する。なお、上記再生コードEおよびLは、3ビット・シフト・レジスタ52により生成される信号であり、PRNコードのリファレンスコードである。
【0051】
インテグレート&ダンプ・フィルタ36および38は、ベースバンド信号をインテグレートおよびダンプして、コード・ループ弁別器40に出力する。コード・ループ弁別器40は、入力信号を所定の電圧レベルに応じて弁別し、コード・ループ・フィルタ42に出力する。コード・ループ・フィルタ42は、入力信号に対して所定のフィルタリング処理を施して、加算器44に出力する。
【0052】
加算器44は、キャリア・ループ・フィルタ20から出力されたNCO制御信号と、コード・ループ・フィルタ42から出力された信号とを加算して加算器46に出力する。加算器46には、加算器44からの信号以外に、CPU114から出力された再生コードの周波数を補正するための信号が入力される。加算器46はこれらの信号を加算して、コードNCO48に出力する。コードNCO48はクロック116からのクロック周波数に基づいて動作し、加算器46からの入力信号に所定の処理を施してそれをPRNコード発生器50に出力する。PRNコード発生器50は、GPS信号と相関性のあるコードを発生させて3ビット・シフト・レジスタ52に出力する。3ビット・シフト・レジスタ52は、入力信号に基づいて上記再生コードP、E、L(すなわちPRNコードのリファレンスコード)を作成して、それぞれを乗算器14、32、34に出力する。
【0053】
キャリア・トラッキング・ループ10における上述した一連の処理が行われることにより、GPS信号のPRNコードが取得される。加えて、コード・トラッキング・ループ30における上述した一連の処理が行われることにより、上記PRNコードと、受信チャンネル1で生成された各再生コード信号とが位相同期されて、航法メッセージが取得される。また更に、受信チャンネル1は、図示しない算出手段により、航法メッセージに基づいて、GPS衛星の座標、ドップラーシフト量、キャリア周波数(疑似距離レート)、キャリア位相、GPS受信装置100におけるGPSタイムラグ等を算出する。
【0054】
コード・トラッキング・ループ30でのGPS信号のPRNコードとの同期処理を行う過程において、GPS衛星からGPS受信装置100までのGPS信号の伝搬時間が取得される。受信チャンネル1は、GPS衛星の座標と伝搬時間とに基づいてGPS衛星とGPS受信装置100との疑似距離を算出し、CPU114に出力する。
【0055】
例えばGPS衛星iの疑似距離riは以下の式(1)で表される。三次元測位では式(1)に示されるように未知のパラメータが四つ存在するため、捕捉・追尾すべきGPS衛星が少なくとも四機必要となる。
【数1】
ただし、GPS衛星iの位置座標を(xi、yi、zi)、GPS受信装置100の位置座標を(x、y、z)、「c」を光の速度、「δ」をクロック116の誤差を除去するためのクロック・オフセット値とする。
【0056】
CPU114は、各受信チャンネルで取得された航法メッセージに基づいて算出された各測定値やデータ、疑似距離等により、自己の現在位置、移動速度、方位等の前段推定情報等を含むGPS測位解を算出してCPU130に渡す。CPU114は、例えば航法メッセージに基づいて算出された少なくとも四つの疑似距離に基づいて上記式(1)を解き、自己の現在位置を算出する。上記式(1)は非線形の連立方程式であるため、通常は適当な初期値を用いて線形化を行い、ニュートン・ラフソン法により解を求める。
【0057】
なお、二次元測位の場合は高度を既知と仮定する。従って、少なくとも三機のGPS衛星を捕捉・追尾するだけで自己の現在位置情報を算出することができる。また、五機以上のGPS衛星を捕捉・追尾して測位に利用する場合は、GPS衛星の数が未知のパラメータの数よりも多くなる。このため最小二乗法を用いて上記式を解くことができる。従って、より正確な解を得ることが可能となる。
【0058】
ここで、上述したようにマルチパスやCWノイズ等の影響で受信状態が悪化した場合、取得されるGPS測位解(例えば疑似距離等)に誤差が含まれる。このため、前段推定情報の精度低下およびセンサ学習の劣化が起こり得る。本実施形態では、図4に示されたフローチャートの処理により、マルチパスやCWノイズ等の影響による上記誤差を検知して、前段推定情報の精度低下およびセンサ学習の劣化を軽減することができる。
【0059】
例えばユーザにより電源(不図示)がオンされてナビゲーションシステム200が起動すると、CPU130は、GPS受信装置100に対してGPS測位解をリクエストする。そして、そのレスポンスを待機する(ステップ1、以下、明細書及び図面においてステップを「S」と略記)。
【0060】
GPS受信装置100は、例えば1秒間に一回測位演算を試行し、上記リクエストに応じてその測位演算の結果をCPU130に渡す。GPS受信装置100は、四機以上のGPS衛星を捕捉・追尾できた場合には測位演算を行ってGPS測位解を得る。従って、GPS受信装置100は、四機以上のGPS衛星を捕捉・追尾できているときには、CPU130からのリクエストに応答してGPS測位解をCPU130に渡す。一方、GPS受信装置100は、三機以下のGPS衛星しか捕捉・追尾できない場合にはGPS測位解を得ることができない。従って、GPS受信装置100は、三機以下のGPS衛星しか捕捉・追尾できていないときには、CPU130からのリクエストに応答して非測位状態であることを報知する。
【0061】
S2の処理において、CPU130は、GPS受信装置100のレスポンスが非測位状態を示す報知信号であるときには(S2:NO)、以降の処理を実行できないため、図4のフローチャートをリターンする。これに対して、GPS受信装置100のレスポンスがGPS測位解であるときには(S2:YES)、S3の処理に進む。
【0062】
S3の処理において、CPU130は、クロック・オフセット基準値δrefが算出されているか否かを判定する。クロック・オフセット基準値δrefが算出されている場合(S3:YES)、CPU130はS4の処理に進む。また、クロック・オフセット基準値δrefが算出されていない場合(S3:NO)、CPU130はS8の処理に進む。
【0063】
S8の処理において、CPU130は、クロック・オフセット基準値δrefを算出する。ここで算出されるクロック・オフセット基準値δrefは、GPS測位解におけるマルチパスやCWノイズ等の影響の有無を判断するために用いる参照値である。
【0064】
図5に、図4のS8の、クロック・オフセット基準値δrefを算出する処理のサブルーチンを示す。
【0065】
図5に示されるように、CPU130は、クロック・オフセット基準値δrefを算出するために、先ず、図4のS2の処理で取得したGPS測位解に含まれるクロック・オフセット値δをクロック・オフセット保存リストに追加するか否かを判定する(S81)。なお、CPU130は、例えば内部メモリ(不図示)の所定領域を使用してクロック・オフセット保存リストを作成・格納する。
【0066】
クロック・オフセット基準値δrefは、規定数以上のクロック・オフセット値δの平均値であって、以下の条件(A)および(B)を満たすクロック・オフセット値δの平均値である。
(A)良好な受信状態で取得されたクロック・オフセット値δ
(B)直近(一定の期間、例えば過去数秒間)で取得されたクロック・オフセット値δ
【0067】
従って、直近で取得されたGPS測位解に含まれるクロック・オフセット値δをクロック・オフセット保存リストに追加するか否かは、当該のクロック・オフセット値δが良好な受信状況下で得られたGPS測位解に含まれるものであるか否かによって決定される。
【0068】
GPS測位解は、例えば以下の条件(a)〜(e)を満たすものであるとき、良好な受信状況下で得られたものと判定される。
(a)DOPが規定値以下
(b)GPS測位解を得るために用いた各GPS信号のC/N値が規定値以上
(c)GPS測位解の推定移動速度と車速パルス信号による推定移動速度との差が規定値以内
(d)GPS測位解の推定位置とDRセンサ出力に基づく推定位置との差が規定値以内
(e)GPS測位解の推定方位とDRセンサ出力に基づく推定方位との差が規定値以内
なお、条件(a)のDOP、条件(b)のC/N値等の情報は、GPS受信装置100が受信したGPS信号に基づいて取得する情報であり、例えばGPS測位解と共にGPS受信装置100からCPU130に渡される。また、条件(d)の「DRセンサ出力に基づく推定位置」とは、CPU130が、直前のマップマッチング後の推定位置に対して、車速パルス信号により得られる走行距離およびジャイロセンサ132により得られる方位変化を加えて暫定的な位置を算出し、当該の暫定位置にマップマッチングを適用して得られる推定位置である。また、条件(e)の「DRセンサ出力に基づく推定方位」とは、CPU130が、直前のマップマッチング後の推定方位に対して、車速パルス信号により得られる走行距離およびジャイロセンサ132により得られる方位変化を加えて暫定的な方位を算出し、当該の暫定方位にマップマッチングを適用して得られる推定方位である。条件(c)〜(e)は、センサ学習がある程度継続し、パラメータ(例えば「GPS測位解の推定移動速度」や「直前のマップマッチング後の推定位置」等)の信頼性がある程度高い状態であるときに適用されるものであるとする。また、条件(a)〜(e)において「規定値」という同一の文言を用いているが、各条件における「規定値」は、それぞれの条件に合わせて適宜設定された値であり、典型的には同一の値を示すものではなくそれぞれ異なる値であり得る。
【0069】
S81の処理において、CPU130は、条件(a)〜(e)の全てが満たされる場合、図4のS2の処理で取得されたクロック・オフセット値δが良好な受信状況下で得られたGPS測位解に含まれるものであり、誤差の少ない値であると判定して(S81:YES)、S82の処理に進む。
【0070】
S82の処理において、CPU130は、クロック・オフセット値δをクロック・オフセット保存リストに追加(すなわち内部メモリの所定領域に保存)する。また、追加するクロック・オフセット値δに関連付けて、GPS受信装置100が測位を行った時刻情報も追加する。この時刻情報は、GPS測位解算出時にGPS受信装置100が取得する情報であり、例えばGPS測位解と共にGPS受信装置100からCPU130に渡される。
【0071】
CPU130は、クロック・オフセット値δのリスト追加に次いで、変数nを1インクリメントし(S83)、S84の処理に進む。この変数nは、クロック・オフセット保存リストに含まれるクロック・オフセット値δの数を表すものである。変数nは、図4のS8の処理がナビゲーションシステム200起動後に初めて実行される場合に限り、当該のS8の処理開始時に0にリセットされる。
【0072】
また、S81の処理において、CPU130は、条件(a)〜(e)の何れかが満たされない場合、当該のクロック・オフセット値δがマルチパスやCWノイズ等の影響を受けたGPS測位解に含まれるものであり、比較的大きな誤差を含むと判定する(S81:NO)。そして、そのクロック・オフセット値δをクロック・オフセット保存リストに追加することなくS84の処理に進む。
【0073】
S84の処理において、CPU130は、クロック・オフセット保存リスト中の各時刻情報を参照して、当該リストに追加されてから一定の期間(「有効期間T」とする)が経過したクロック・オフセット値δがあるか否かを判定する。リスト追加後に有効期間Tが経過したクロック・オフセット値δがある場合(S84:YES)、CPU130は、そのクロック・オフセット値δが直近のデータでなく信頼性が低いものとして削除する(S85)。次いで、変数nからmを減算して(S86)、S87の処理に進む。なお、「m」は、S85の処理で削除されたクロック・オフセット値δの数を表す。また、リスト追加後に有効期間Tが経過したクロック・オフセット値δがない場合(S84:NO)、CPU130は、リスト中の各クロック・オフセット値δが直近のデータであり信頼性が高いものであるとして、それらを削除することなくS87の処理に進む。
【0074】
ここで、クロック・オフセット保存リストに追加されてから有効期間Tが経過してないクロック・オフセット値δの信頼性が高い理由について説明を加える。クロック116の水晶振動子の振動周波数の偏差は、周辺温度に依存して変化する。また、経時的にも変化する。しかし、GPS受信装置は、一般にシールドケース等により外気と遮断されている。また、ハウジング内部に実装されているため、クロック116は、温度変化を受け難い環境にあると言える。従って、温度変化による上記偏差の変化は、短期間(ここでは「有効期間T」)では実質的に起こらない。また、経時変化も短期間では無視することができる。これらの観点から、直近のデータ(すなわちリスト追加後に有効期間Tが経過していないデータ)の信頼性が高いと言える。
【0075】
S87の処理において、CPU130は、変数nが所定数以上であるか否かを判定する。変数nが所定数以上である場合(S87:YES)、CPU130は、精度の高いクロック・オフセット基準値δrefを算出できる程度のサンプリング数が収集できたとして、下記式(2)に基づいてクロック・オフセット基準値δrefを算出し、内部メモリのクロック・オフセット基準値δrefを更新する(S88)。そして、図5のサブルーチンをリターンし、図4のS1の処理に復帰する。また、変数nが所定数未満である場合(S87:NO)、CPU130は、オフセット基準値δrefを算出することなく、図5のサブルーチンをリターンして図4のS1の処理に復帰する。また、前回のオフセット基準値δrefが内部メモリに保存されている場合にはそれを消去(或いは、当該のオフセット基準値δrefを無効データとして扱うように)する。
【数2】
【0076】
ここで、図4のフローチャートの説明に戻る。S4の処理において、CPU130は、GPS測位解におけるマルチパスやCWノイズ等の影響の有無を判断するために、図8の処理で算出されたクロック・オフセット基準値δrefと、S2の処理で取得されたクロック・オフセット値δとの差の絶対値dを算出する(S4)。
【0077】
次に、CPU130は、算出された絶対値dが所定値R以下か否かを判定する(S5)。絶対値dが所定値R以下の場合(S5:YES)、信頼性の高いクロック・オフセット基準値δrefと、S2の処理で取得されたクロック・オフセット値δとの乖離が小さい。この場合、GPS測位解がマルチパスやCWノイズ等の影響を受けたものでない(或いは、軽微な影響しか受けていないものである)ことを意味する。従って、CPU130は、S6の処理に進み、当該GPS測位解の前段推定情報が精度の高い情報であると判断する。そして、当該のGPS測位解を、最終的な推定情報を取得するための演算処理に採用する。すなわち、CPU130は、GPS測位解とDR測位解を併用し、かつマップマッチングを行って推定情報を取得し、それをユーザに提示する。また、当該のGPS測位解を用いてセンサ学習を実行し、DR測位解の精度向上を図る。CPU130は、S6の処理後、図4のフローチャートをリターンする。
【0078】
これに対して絶対値dが所定値Rよりも大きい場合(S5:NO)、信頼性の高いクロック・オフセット基準値δrefと、S2の処理で算出されたクロック・オフセット値δとの乖離が大きい。この場合、GPS測位解がマルチパスやCWノイズ等の影響を受けたものであることを意味する。従って、CPU130は、S7の処理に進み、当該GPS測位解の前段推定情報が精度の低い情報であると判断する。そして、当該のGPS測位解を、最終的な推定情報を取得するための演算処理に採用しない。すなわち、CPU130は、DR測位解による前段推定情報とマップマッチングに基づいて得られる推定情報をユーザに提示する。また、精度の低いGPS測位解を用いたセンサ学習によってDR測位解の精度が低下するのを防止するため、当該のGPS測位解をセンサ学習に採用しない。CPU130は、S7の処理後、図4のフローチャートをリターンする。
【0079】
すなわち本実施形態のナビゲーションシステム200によれば、マルチパスやCWノイズ等の影響を受けてないGPS測位解を最終的な推定情報の取得およびセンサ学習に採用し、上記影響を受けた精度の低いGPS測位解を最終的な推定情報の取得およびセンサ学習に採用しないように動作する。これにより、最終的な推定情報の精度が低下し難くなり、かつセンサ学習も劣化しないという効果が得られる。
【0080】
以上が本発明の実施の形態である。本発明はこれらの実施の形態に限定されるものではなく様々な範囲で変形が可能である。例えばS81の処理において、CPU130は、条件(a)〜(e)のうち少なくとも1つが満たされている場合に、そのクロック・オフセット値δが誤差の少ない値であると判定するようにしても良い。附言するに、S81の処理における判定基準は種々あり、想定されるあらゆる条件の組み合わせを適用することが可能である。また、その条件も(a)〜(e)に限定されず、他にも様々なものが想定される。
【図面の簡単な説明】
【0081】
【図1】本発明の実施の形態のナビゲーションシステムの構成を示したブロック図である。
【図2】本発明の実施の形態のGPS受信装置の構成を示したブロック図である。
【図3】本発明の実施の形態のGPS受信装置に備えられたDSPが有している受信チャンネルの構成を示したブロック図である。
【図4】本発明の実施の形態で実行される、前段推定情報の精度低下およびセンサ学習の劣化を軽減するための処理を示したフローチャートである。
【図5】図4のS8のクロック・オフセット基準値δrefを算出する処理のサブルーチンである。
【符号の説明】
【0082】
1〜n 受信チャンネル
100 GPS受信装置
116 クロック
130 CPU
132 車速センサ
134 ジャイロセンサ
200 ナビゲーションシステム
【特許請求の範囲】
【請求項1】
複数のGPS(Global Positioning System)衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得手段を有し、当該のGPS測位解の精度を判断するナビゲーションシステムであって、
自律航法のための自律航法情報を出力する情報出力手段と、
該出力された自律航法情報と該GPS測位解との比較結果に基づいて所定の参照値を算出する参照値算出手段と、
該算出された所定の参照値と、該測位の過程で得られるクロック・オフセット値との差分を算出する差分算出手段と、を具備し、
該算出される差分に基づいて該GPS測位解の精度を判断すること、を特徴とするナビゲーションシステム。
【請求項2】
該クロック・オフセット値が所定の条件を満たすか否かを判定する条件判定手段と、
該所定の条件を満たすと判定されたクロック・オフセット値を収集するクロック・オフセット値収集手段と、を更に具備し、
前記参照値算出手段は、該収集されたクロック・オフセット値に基づいて該所定の参照値を算出すること、を特徴とする請求項1に記載のナビゲーションシステム。
【請求項3】
該所定の条件に、
(A)良好な受信状態で取得されたこと、
(B)所定の期間内に取得されたこと、
の少なくとも1つを含むこと、を特徴とする請求項2に記載のナビゲーションシステム。
【請求項4】
前記条件判定手段は、該GPS測位解と該自律航法情報に基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定すること、を特徴とする請求項3に記載のナビゲーションシステム。
【請求項5】
該自律航法情報は、該移動体の移動速度を示す車速パルスを含み、
前記条件判定手段は、該GPS測位解に含まれる推定移動速度と該車速パルスに基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定すること、を特徴とする請求項4に記載のナビゲーションシステム。
【請求項6】
該自律航法情報は、該移動体の方位を示す方位信号を更に含み、
前記条件判定手段は、該GPS測位解に含まれる推定位置又は方位と、該車速パルスおよび該方位信号に基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定すること、を特徴とする請求項5に記載のナビゲーションシステム。
【請求項7】
前記クロック・オフセット値収集手段は、収集してから該所定の期間を経過したクロック・オフセット値を消去すること、を特徴とする請求項3から請求項6の何れかに記載のナビゲーションシステム。
【請求項8】
GPS測位解の精度を判断するGPS測位解精度判定方法であって、
複数のGPS衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得ステップと、
自律航法のための自律航法情報を取得するステップと、
該取得された自律航法情報と該GPS測位解との比較結果に基づいて所定の参照値を算出する参照値算出ステップと、
該算出された所定の参照値と、該測位の過程で得られるクロック・オフセット値との差分を算出する差分算出ステップと、
該算出される差分に基づいて該GPS測位解の精度を判断する精度判断ステップと、を含む、GPS測位解精度判定方法。
【請求項9】
該クロック・オフセット値が所定の条件を満たすか否かを判定する条件判定ステップと、
該所定の条件を満たすと判定されたクロック・オフセット値を収集するクロック・オフセット値収集ステップと、を更に含み、
前記参照値算出ステップにおいて、該収集されたクロック・オフセット値に基づいて該所定の参照値を算出すること、を特徴とする請求項8に記載のGPS測位解精度判定方法。
【請求項10】
該所定の条件に、
(A)良好な受信状態で取得されたこと、
(B)所定の期間内に取得されたこと、
の少なくとも1つを含むこと、を特徴とする請求項9に記載のGPS測位解精度判定方法。
【請求項11】
前記条件判定ステップにおいて、該GPS測位解と該自律航法情報に基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定すること、を特徴とする請求項10に記載のGPS測位解精度判定方法。
【請求項12】
該自律航法情報に該移動体の移動速度を示す車速パルスが含まれるとき、前記条件判定ステップにおいて、該GPS測位解に含まれる推定移動速度と該車速パルスに基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定すること、を特徴とする請求項11に記載のGPS測位解精度判定方法。
【請求項13】
該自律航法情報に該移動体の方位を示す方位信号が含まれるとき、前記条件判定ステップにおいて、該GPS測位解に含まれる推定位置又は方位と、該車速パルスおよび該方位信号に基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定すること、を特徴とする請求項12に記載のGPS測位解精度判定方法。
【請求項14】
前記クロック・オフセット値収集ステップにおいて、収集してから該所定の期間を経過したクロック・オフセット値を消去すること、を特徴とする請求項10から請求項13の何れかに記載のGPS測位解精度判定方法。
【請求項1】
複数のGPS(Global Positioning System)衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得手段を有し、当該のGPS測位解の精度を判断するナビゲーションシステムであって、
自律航法のための自律航法情報を出力する情報出力手段と、
該出力された自律航法情報と該GPS測位解との比較結果に基づいて所定の参照値を算出する参照値算出手段と、
該算出された所定の参照値と、該測位の過程で得られるクロック・オフセット値との差分を算出する差分算出手段と、を具備し、
該算出される差分に基づいて該GPS測位解の精度を判断すること、を特徴とするナビゲーションシステム。
【請求項2】
該クロック・オフセット値が所定の条件を満たすか否かを判定する条件判定手段と、
該所定の条件を満たすと判定されたクロック・オフセット値を収集するクロック・オフセット値収集手段と、を更に具備し、
前記参照値算出手段は、該収集されたクロック・オフセット値に基づいて該所定の参照値を算出すること、を特徴とする請求項1に記載のナビゲーションシステム。
【請求項3】
該所定の条件に、
(A)良好な受信状態で取得されたこと、
(B)所定の期間内に取得されたこと、
の少なくとも1つを含むこと、を特徴とする請求項2に記載のナビゲーションシステム。
【請求項4】
前記条件判定手段は、該GPS測位解と該自律航法情報に基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定すること、を特徴とする請求項3に記載のナビゲーションシステム。
【請求項5】
該自律航法情報は、該移動体の移動速度を示す車速パルスを含み、
前記条件判定手段は、該GPS測位解に含まれる推定移動速度と該車速パルスに基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定すること、を特徴とする請求項4に記載のナビゲーションシステム。
【請求項6】
該自律航法情報は、該移動体の方位を示す方位信号を更に含み、
前記条件判定手段は、該GPS測位解に含まれる推定位置又は方位と、該車速パルスおよび該方位信号に基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定すること、を特徴とする請求項5に記載のナビゲーションシステム。
【請求項7】
前記クロック・オフセット値収集手段は、収集してから該所定の期間を経過したクロック・オフセット値を消去すること、を特徴とする請求項3から請求項6の何れかに記載のナビゲーションシステム。
【請求項8】
GPS測位解の精度を判断するGPS測位解精度判定方法であって、
複数のGPS衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得ステップと、
自律航法のための自律航法情報を取得するステップと、
該取得された自律航法情報と該GPS測位解との比較結果に基づいて所定の参照値を算出する参照値算出ステップと、
該算出された所定の参照値と、該測位の過程で得られるクロック・オフセット値との差分を算出する差分算出ステップと、
該算出される差分に基づいて該GPS測位解の精度を判断する精度判断ステップと、を含む、GPS測位解精度判定方法。
【請求項9】
該クロック・オフセット値が所定の条件を満たすか否かを判定する条件判定ステップと、
該所定の条件を満たすと判定されたクロック・オフセット値を収集するクロック・オフセット値収集ステップと、を更に含み、
前記参照値算出ステップにおいて、該収集されたクロック・オフセット値に基づいて該所定の参照値を算出すること、を特徴とする請求項8に記載のGPS測位解精度判定方法。
【請求項10】
該所定の条件に、
(A)良好な受信状態で取得されたこと、
(B)所定の期間内に取得されたこと、
の少なくとも1つを含むこと、を特徴とする請求項9に記載のGPS測位解精度判定方法。
【請求項11】
前記条件判定ステップにおいて、該GPS測位解と該自律航法情報に基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定すること、を特徴とする請求項10に記載のGPS測位解精度判定方法。
【請求項12】
該自律航法情報に該移動体の移動速度を示す車速パルスが含まれるとき、前記条件判定ステップにおいて、該GPS測位解に含まれる推定移動速度と該車速パルスに基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定すること、を特徴とする請求項11に記載のGPS測位解精度判定方法。
【請求項13】
該自律航法情報に該移動体の方位を示す方位信号が含まれるとき、前記条件判定ステップにおいて、該GPS測位解に含まれる推定位置又は方位と、該車速パルスおよび該方位信号に基づいて、該クロック・オフセット値が良好な受信状態で取得されたものであるか否かを判定すること、を特徴とする請求項12に記載のGPS測位解精度判定方法。
【請求項14】
前記クロック・オフセット値収集ステップにおいて、収集してから該所定の期間を経過したクロック・オフセット値を消去すること、を特徴とする請求項10から請求項13の何れかに記載のGPS測位解精度判定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2008−157705(P2008−157705A)
【公開日】平成20年7月10日(2008.7.10)
【国際特許分類】
【出願番号】特願2006−345462(P2006−345462)
【出願日】平成18年12月22日(2006.12.22)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成20年7月10日(2008.7.10)
【国際特許分類】
【出願日】平成18年12月22日(2006.12.22)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]