
ナビゲーションシステム、ナビゲーション方法、及びナビゲーションプログラム
【課題】ユーザにとって視認しやすい態様で、運転者による運転操作の評価結果を地図上に表示することができる、ナビゲーションシステム、ナビゲーション方法、及びナビゲーションプログラムを提供すること。
【解決手段】ナビゲーションシステム1は、車両の運転者による運転操作を評価する際の指標となる評価情報を、所定距離の単位区間毎に取得する評価情報取得部11と、運転者による運転操作を評価するための評価区間の距離を、ディスプレイ5に表示されている地図の縮尺に基づいて決定し、当該決定した距離の各評価区間に含まれる単位区間毎の評価情報に基づき、当該各評価区間における運転者による運転操作を評価する評価部12と、評価部12による評価結果を、ディスプレイ5に表示されている地図上の各評価区間に対応する位置に表示するための制御を行う表示制御部13とを備える。
【解決手段】ナビゲーションシステム1は、車両の運転者による運転操作を評価する際の指標となる評価情報を、所定距離の単位区間毎に取得する評価情報取得部11と、運転者による運転操作を評価するための評価区間の距離を、ディスプレイ5に表示されている地図の縮尺に基づいて決定し、当該決定した距離の各評価区間に含まれる単位区間毎の評価情報に基づき、当該各評価区間における運転者による運転操作を評価する評価部12と、評価部12による評価結果を、ディスプレイ5に表示されている地図上の各評価区間に対応する位置に表示するための制御を行う表示制御部13とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーションシステム、ナビゲーション方法、及びナビゲーションプログラムに関する。
【背景技術】
【0002】
従来、車両の走行経路を案内するナビゲーションシステムが用いられている。近年では、燃料費節約や環境保全の観点から省燃費走行への要求が高まっており、車両の走行における燃費低減を目的とした案内を行うナビゲーションシステムも提案されている。
【0003】
例えば、車両の運転状態の情報と当該運転状態でのエコインジケータの点消灯の状態の情報とを逐次取得して記憶部に格納し、ユーザからの要求があった場合に当該記憶部に格納されている複数の運転状態の情報および当該運転状態でのエコインジケータの点消灯の状態の情報をもとに、運転状態と当該運転状態でのエコインジケータの点消灯の状態との時系列に沿った変化を示す表示を行う、携帯機及び車両システムが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−182108号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述の如き従来のシステムは、単にエコインジケータの点消灯の状態の時系列に沿った変化を示す表示を行うものに過ぎなかった。このため、エコインジケータの点消灯の状態を示すマークを地図上に表示することで当該エコインジケータの点消灯の状態の時系列に沿った変化を示す場合、地図の縮尺を小さくするほど(地図の表示範囲を広域とするほど)各マークの相互間隔が縮小してマーク同士の重なりが発生し、ユーザにとって視認性の悪い表示となってしまう可能性があった。
【0006】
本発明は、上記に鑑みてなされたものであって、ユーザにとって視認しやすい態様で、運転者による運転操作の評価結果を地図上に表示することができる、ナビゲーションシステム、ナビゲーション方法、及びナビゲーションプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、請求項1に記載のナビゲーションシステムは、車両の運転者による運転操作を評価する際の指標となる評価情報を、所定距離の単位区間毎に取得する評価情報取得手段と、前記運転者による運転操作を評価するための評価区間の距離を、表示手段に表示されている地図の縮尺に基づいて決定し、当該決定した距離の各評価区間に含まれる前記単位区間毎の前記評価情報に基づき、当該各評価区間における前記運転者による運転操作を評価する評価手段と、前記評価手段による評価結果を、前記表示手段に表示されている地図上の前記各評価区間に対応する位置に表示するための制御を行う表示制御手段と、を備える。
【0008】
また、請求項2に記載のナビゲーションシステムは、請求項1に記載のナビゲーションシステムにおいて、前記評価手段は、前記単位区間毎の前記評価情報に基づき、当該各単位区間における前記運転者による運転操作を評価し、前記表示制御手段は、前記車両の走行経路を構成する全ての前記評価区間における評価結果が最良であって、且つ、当該車両の走行経路を構成する前記各単位区間の中に評価結果が最良ではない単位区間が存在する場合、当該評価結果が最良ではない単位区間を案内するための制御を行う。
【0009】
また、請求項3に記載のナビゲーションシステムは、請求項2に記載のナビゲーションシステムにおいて、前記表示制御手段は、前記車両の走行経路を構成する全ての前記評価区間における評価結果が最良であって、且つ、当該車両の走行経路を構成する前記各単位区間の中に評価結果が最良ではない単位区間が存在する場合、当該評価結果が最良ではない単位区間を含む評価区間における評価結果が最良ではなくなる当該評価区間の距離を特定し、当該特定した距離に基づいて地図の縮尺を決定し、前記表示手段に表示されている地図の縮尺を当該決定した縮尺に変更し、当該縮尺を変更した地図上で当該評価結果が最良ではない単位区間を案内するための制御を行う。
【0010】
また、請求項4に記載のナビゲーションシステムは、請求項1から3のいずれか一項に記載のナビゲーションシステムにおいて、前記評価情報取得手段は、前記運転者による運転操作が燃費向上に適したものであるか否かを逐次判定し、前記単位区間毎に、当該単位区間内での前記判定結果を前記評価情報として取得し、前記評価手段は、前記各評価区間に含まれる前記単位区間毎の前記評価情報に基づき、当該各評価区間において前記運転者による運転操作が燃費向上に適していた際の前記車両の走行距離が占める割合を特定し、当該特定した割合に基づき、各評価区間における前記運転者による運転操作を評価する。
【0011】
また、請求項5に記載のナビゲーション方法は、車両の運転者による運転操作を評価する際の指標となる評価情報を、所定距離の単位区間毎に取得する評価情報取得ステップと、前記運転者による運転操作を評価するための評価区間の距離を、表示手段に表示されている地図の縮尺に基づいて決定し、当該決定した距離の各評価区間に含まれる前記単位区間毎の前記評価情報に基づき、当該各評価区間における前記運転者による運転操作を評価する評価ステップと、前記評価ステップにおける評価結果を、前記表示手段に表示されている地図上の当該評価区間に対応する位置に表示するための制御を行う表示制御ステップと、を含む。
【0012】
また、請求項6に記載のナビゲーションプログラムは、請求項5に記載の方法をコンピュータに実行させる。
【発明の効果】
【0013】
請求項1に記載のナビゲーションシステム、請求項5に記載のナビゲーション方法、及び請求項6に記載のナビゲーションプログラムによれば、評価手段は、運転者による運転操作を評価するための評価区間の距離を、表示手段に表示されている地図の縮尺に基づいて決定し、当該決定した距離の各評価区間に含まれる単位区間毎の評価情報に基づき、各評価区間における運転者による運転操作を評価し、表示制御手段は、当該評価手段よる評価結果を、表示手段に表示されている地図上の評価区間に対応する位置に表示するための制御を行うので、地図の縮尺に応じて、表示手段に表示される各評価結果同士の相互間隔を適切な距離に保持することができ、ユーザにとって視認しやすい態様で、運転者による運転操作の評価結果を地図上に表示することができる。
【0014】
また、請求項2に記載のナビゲーションシステムによれば、表示制御手段は、車両の走行経路を構成する全ての評価区間における評価結果が最良であって、且つ、当該車両の走行経路を構成する各単位区間の中に評価結果が最良ではない単位区間が存在する場合、評価結果が最良ではない単位区間を案内するための制御を行うので、評価区間の距離によっては全ての評価区間における評価結果が最良となる場合においても、評価結果が最良ではない単位区間をユーザに把握させることができ、運転操作を改善可能な区間をユーザに通知することができる。
【0015】
また、請求項3に記載のナビゲーションシステムによれば、表示制御手段は、車両の走行経路を構成する全ての評価区間における評価結果が最良であって、且つ、当該車両の走行経路を構成する各単位区間の中に評価結果が最良ではない単位区間が存在する場合、当該評価結果が最良ではない単位区間を含む評価区間における評価結果が最良ではなくなる評価区間の距離を特定し、当該特定した距離に基づいて地図の縮尺を決定し、表示手段に表示されている地図の縮尺を当該決定した縮尺に変更し、縮尺を変更した地図上で評価結果が最良ではない単位区間を案内するための制御を行うので、評価結果が最良ではない単位区間を含む評価区間をユーザに把握させることができ、運転操作を改善可能な区間を一層容易にユーザに把握させることができる。
【0016】
また、請求項4に記載のナビゲーションシステムによれば、評価情報取得手段は、運転者による運転操作が燃費向上に適したものであるか否かを逐次判定し、単位区間毎に、当該単位区間内での判定結果を評価情報として取得し、評価手段は、各評価区間に含まれる単位区間毎の評価情報に基づき、当該各評価区間において運転者による運転操作が燃費向上に適していた際の車両の走行距離が占める割合を特定し、当該特定した割合に基づき、各評価区間における運転者による運転操作を評価するので、各評価区間において運転者が燃費向上に適した運転操作を行った割合に応じて、各評価区間において運転者による運転操作が燃費向上に適したものであるか否かを適切に判定することができる。
【図面の簡単な説明】
【0017】
【図1】実施の形態に係るナビゲーションシステムを例示するブロック図である。
【図2】評価情報取得処理のフローチャートである。
【図3】エコランプ等を表示するメーターパネルを例示した図であり、図3(a)はガソリン車の場合を例示した図、図3(b)はハイブリッド車の場合を例示した図である。
【図4】表示制御処理のフローチャートである。
【図5】評価処理のフローチャートである。
【図6】各評価区間における運転者による運転操作の評価結果を表示したディスプレイを例示した図である。
【図7】最終評価結果を表示するディスプレイを例示した図である。
【図8】非最良単位区間案内処理のフローチャートである。
【発明を実施するための形態】
【0018】
以下、本発明に係るナビゲーションシステム、ナビゲーション方法、及びナビゲーションプログラムの実施の形態について図面を参照しつつ詳細に説明する。ただし、この実施の形態によって本発明が限定されるものではない。
【0019】
(構成)
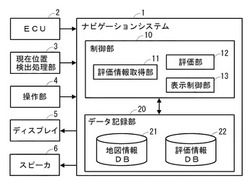
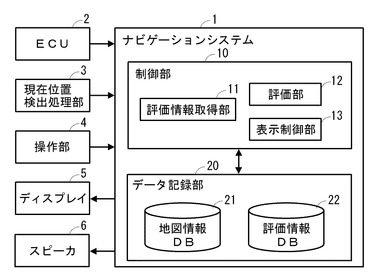
最初に、ナビゲーションシステムの構成について説明する。図1は、本実施の形態に係るナビゲーションシステムを例示するブロック図である。ナビゲーションシステム1は例えば車両に搭載されており、図1に示すように、ECU2(Electronic Control Unit)、現在位置検出処理部3、操作部4、ディスプレイ5、及びスピーカ6に接続されている。
【0020】
(構成−ECU)
ECU2は、車両の各部の状態を各種センサを介して監視し、車両のエンジンやモータジェネレータ等の動力系、トランスミッション、駆動系、制動系等(いずれも図示省略)の車両の各部を制御する。例えば、車軸の回転数に比例する車速パルス信号を車速センサから取得してトランスミッションを制御したり、O2センサから取得した排気ガス中の酸素濃度等に基づいて燃料噴射装置(図示省略)を制御する。このECU2から、車速パルス信号や燃料噴射量等の各種情報がナビゲーションシステム1に入力される。
【0021】
(構成−現在位置検出処理部)
現在位置検出処理部3は、車両の現在位置を検出する現在位置検出手段である。具体的には、現在位置検出処理部3は、GPS、地磁気センサ、距離センサ、又はジャイロセンサ(いずれも図示省略)の少なくとも一つを有し、現在の車両の位置(座標)及び方位等を公知の方法にて検出する。
【0022】
(構成−操作部)
操作部4は、ユーザによる操作入力を受け付ける操作手段である。この操作部4の具体的な構成は任意であり、例えば、ディスプレイ5の前面に設けたタッチパネル、押しボタン、リモートコントローラの如き遠隔操作手段、あるいは、音声入力を受け付けるマイクの如き音声認識手段を用いて操作部4を構成することができる。
【0023】
(構成−ディスプレイ)
ディスプレイ5は、ナビゲーションシステム1の制御に基づいて各種情報の表示出力を行う出力手段である。なお、このディスプレイ5の具体的な構成は任意であり、公知の液晶ディスプレイや有機ELディスプレイの如きフラットパネルディスプレイを使用することができる。
【0024】
(構成−スピーカ)
スピーカ6は、ナビゲーションシステム1の制御に基づいて各種の音声を出力する出力手段である。スピーカ6より出力される音声の具体的な態様は任意であり、必要に応じて生成された合成音声や、予め録音された音声を出力することができる。
【0025】
(構成−ナビゲーションシステム)
ナビゲーションシステム1は、制御部10、及びデータ記録部20を備えている。
【0026】
(構成−ナビゲーションシステム−制御部)
制御部10は、ナビゲーションシステム1を制御する制御手段であり、具体的には、CPU、当該CPU上で解釈実行される各種のプログラム(OSなどの基本制御プログラムや、OS上で起動され特定機能を実現するアプリケーションプログラムを含む)、及びプログラムや各種のデータを格納するためのRAMの如き内部メモリを備えて構成されるコンピュータである。特に、本実施の形態に係るナビゲーションプログラムは、任意の記録媒体又はネットワークを介してナビゲーションシステム1にインストールされることで、制御部10の各部を実質的に構成する。
【0027】
この制御部10は、機能概念的に、評価情報取得部11、評価部12、及び表示制御部13を備えている。評価情報取得部11は、車両の運転者による運転操作を評価する際の指標となる評価情報を、所定距離の単位区間毎に取得する評価情報取得手段である。評価部12は、各評価区間における運転者による運転操作を評価する評価手段である。表示制御部13は、評価部12による評価結果を、ディスプレイ5に表示されている地図上の各評価区間に対応する位置に表示するための制御を行う表示制御手段である。これらの制御部10の各部によって実行される処理の詳細については後述する。
【0028】
(構成−ナビゲーションシステム−データ記録部)
データ記録部20は、ナビゲーションシステム1の動作に必要なプログラム及び各種のデータを記録する記録手段であり、例えば、外部記憶装置としてのハードディスク(図示省略)の如き磁気的記録媒体を用いて構成されている。ただし、ハードディスクに代えてあるいはハードディスクと共に、フラッシュメモリの如き半導体型記憶媒体、又はDVDやブルーレイディスクの如き光学的記録媒体を含む、その他の任意の記録媒体を用いることができる。
【0029】
このデータ記録部20は、地図情報データベース21(以下、データベースをDBと略記する)、及び評価情報DB22を備えている。
【0030】
地図情報DB21は、地図情報を格納する地図情報格納手段である。「地図情報」は、例えばリンクデータ(リンク番号、接続ノード番号、道路座標、道路種別、車線数、走行規制等)、ノードデータ(ノード番号、座標)、地物データ(信号機、道路標識、ガードレール、建物等)、施設データ(各施設の位置、各施設の種別等)、地形データ、地図をディスプレイ5に表示するための地図表示データ等を含んで構成されている。
【0031】
評価情報DB22は、車両の運転者による運転操作を評価する際の指標となる評価情報を格納する評価情報格納手段である。なお、評価情報の具体的な内容や、評価情報DB22に評価情報が格納されるタイミング等については後述する。
【0032】
(処理)
次に、このように構成されたナビゲーションシステム1によって実行される処理について説明する。ナビゲーションシステム1によって実行される処理は、評価情報取得処理と表示制御処理とに大別される。
【0033】
(処理−評価情報取得処理)
まず、評価情報取得処理について説明する。図2は評価情報取得処理のフローチャートである(以下の各処理の説明ではステップを「S」と略記する)。この評価情報取得処理は、例えば、ナビゲーションシステム1に電源が投入され、操作部4を介した操作入力により車両の走行の目的地が設定された場合に開始される。ここで、「目的地の設定」とは、操作部4を介した操作入力により最終目的地が設定される場合の他、既に設定されている複数の目的地が操作部4を介した操作入力により並べ替えられ、異なる目的地が最終目的地として設定される場合、あるいは、既に設定されている最終目的地が消去され、他の目的地が最終目的地として設定される場合等も含む(後述する表示制御処理についても同じ)。
【0034】
評価情報取得処理が開始されると、評価情報取得部11は、出発地(例えば現在位置検出処理部3により検出された現在位置)から目的地までの経路案内が開始されるまで待機する(SA1、No)。なお、出発地から目的地までの経路探索や、当該探索結果に基づく経路案内の具体的な内容については、公知の経路探索方法や経路案内方法を用いることができるため、詳細な説明を省略する(後述する表示制御処理についても同じ)。
【0035】
出発地から目的地までの経路案内が開始されると(SA1、Yes)、評価情報取得部11は、運転者による運転操作が燃費向上に適したものであるか否かを逐次(例えば所定の単位時間毎に、あるいは所定の単位距離毎に)判定し、当該判定結果をRAM(図示省略)等に記録する(SA2)。具体的には、運転者による運転操作が燃費向上に適したものであるか否かを示すエコランプが車両のメーターパネル(図示省略)内に表示される場合において、評価情報取得部11は、ECU2等からエコランプの点消灯状態を特定するための情報を取得し、当該取得した情報に基づき、エコランプの点消灯状態を所定の単位時間毎、あるいは所定の単位距離毎に判定する。そして、当該判定結果をRAM等に記録する。なお「エコランプ」には、図3(a)に例示したエコランプ、あるいは図3(b)に例示したエコドライブインジケータランプやインジケータ等が含まれる。
【0036】
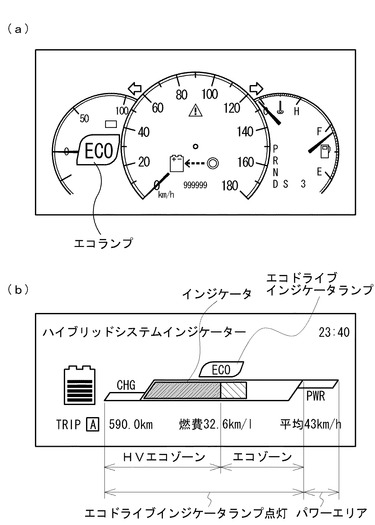
図3はエコランプ等を表示するメーターパネルを例示した図であり、図3(a)はガソリン車の場合を例示した図、図3(b)はハイブリッド車の場合を例示した図である。例えば車両がガソリン車の場合には、ECU2から入力されるアクセル開度等の情報に基づき、運転者による運転操作が燃費向上に適したものである場合(例えばアクセル開度が閾値以下の場合)に、図3(a)に示すようにエコランプが点灯される。一方、運転者による運転操作が燃費向上に適したものではない場合(例えばアクセル開度が閾値より大きい場合)、エコランプは消灯される。この場合において、評価情報取得部11は、ECU2等からエコランプの点消灯状態を特定するための情報を取得し、当該取得した情報に基づき、エコランプが点灯しているか否かを所定の単位時間毎、あるいは所定の単位距離毎に判定し、当該判定結果をRAM等に記録する。
【0037】
また、車両がハイブリッド車の場合には、ECU2から入力される動力源の使用状況等の情報に基づき、運転者による運転操作が燃費向上に適したものである場合に、図3(b)に示すようにエコドライブインジケータランプが点灯される。例えば、回生ブレーキが作動している場合や駆動力としてモータのみを使用している場合(図3(b)においてインジケータが「HVエコゾーン」に該当する場合)、あるいは、駆動力としてエンジンも使用しているがエンジン回転数が閾値以下の場合(図3(b)においてインジケータが「エコゾーン」に該当する場合)等に、エコドライブインジケータランプが点灯される。一方、運転者による運転操作が燃費向上に適したものではない場合、例えば駆動力としてエンジンも使用しており、エンジン回転数が閾値より大きい場合(図3(b)においてインジケータが「パワーエリア」に該当する場合)、エコドライブインジケータランプは消灯される。この場合において、評価情報取得部11は、ECU2等からエコドライブインジケータランプやインジケータの点消灯状態を特定するための情報を取得し、当該取得した情報に基づき、エコドライブインジケータランプが点灯しているか否か、及びエコドライブインジケータランプが点灯している場合にはインジケータが「HVエコゾーン」又は「エコゾーン」のいずれに該当するかを所定の単位時間毎、あるいは所定の単位距離毎に判定し、当該判定結果をRAM等に記録する。
【0038】
図2に戻り、SA2の処理の後、評価情報取得部11は、車両が単位区間を走行したか否かを判定する(SA3)。ここで「単位区間」とは、所定距離の区間を意味する。「所定距離」としては、例えば固定値(例えば100m)を用いることができる。あるいは、車両の走行経路を等間隔で区分した距離、すなわち車両の走行経路を構成する単位となる区間の距離を「所定距離」としてもよい。例えば車両の走行経路を構成する100m毎の区間を「単位区間」とした場合、評価情報取得部11は、前回SA3の処理を行ってから(SA3の処理を初めて行う場合にはSA1で経路案内が開始されてから)車両が100m走行した場合に、当該車両が単位区間を走行したと判定する。
【0039】
その結果、車両が単位区間を走行していない場合(SA3、No)、評価情報取得部11はSA2に戻る。以降、車両が単位区間を走行した(SA3、Yes)と判定されるまで、SA2及びSA3の処理を繰り返す。
【0040】
一方、車両が単位区間を走行した場合(SA3、Yes)、評価情報取得部11は、車両が走行した単位区間内での判定結果を評価情報として取得する(SA4)。
【0041】
例えば車両がガソリン車の場合、評価情報取得部11はRAMを参照し、当該車両が単位区間を走行している間における、エコランプが点灯しているか否かの判定結果を評価情報として取得する。具体的には、評価情報取得部11は、車両が走行した単位区間の距離を特定する情報、及び、当該単位区間においてエコランプが点灯した状態で車両が走行した距離を特定する情報等を、評価情報として取得する。
【0042】
また、車両がハイブリッド車の場合、評価情報取得部11はRAMを参照し、当該車両が単位区間を走行している間における、エコドライブインジケータランプが点灯しているか否か、及びエコドライブインジケータランプが点灯している場合にはインジケータが「HVエコゾーン」又は「エコゾーン」のいずれに該当するかの判定結果を評価情報として取得する。具体的には、評価情報取得部11は、車両が走行した単位区間の距離を特定する情報、当該単位区間においてエコドライブインジケータランプが点灯した状態で車両が走行した距離を特定する情報、及び、当該単位区間においてインジケータが「HVエコゾーン」に該当する状態で車両が走行した距離を特定する情報等を、評価情報として取得する。
【0043】
続いて評価情報取得部11は、SA4で取得した評価情報を、車両が走行した単位区間を特定する情報(例えば車両が走行した単位区間の始点と終点との座標情報や、当該単位区間が位置するリンクのリンク番号等)に関連付けて、評価情報DB22に格納する(SA5)。
【0044】
その後、評価情報取得部11は車両が目的地に到着したか否かを判定し(SA6)、目的地に到着していない場合(SA6、No)、SA2に戻る。以降、車両が目的地に到着するまで、SA2からSA6の処理を繰り返す。これにより、車両の運転者による運転操作を評価する際の指標となる評価情報が、所定距離の単位区間毎に取得される。
【0045】
一方、車両が目的地に到着した場合(SA6、Yes)、評価情報取得部11は評価情報取得処理を終了する。この際、評価情報取得部11は、車両が目的地に到着するまでSA5で評価情報DB22に格納された評価情報に関連付けて、車両が走行した走行経路を特定する情報(例えば、出発地と目的地との座標情報)、評価情報が取得された日時を特定する情報、出発地から目的地に至る走行に対する最終的な評価結果を特定する情報等を、当該評価情報DB22に格納する。
【0046】
(処理−表示制御処理)
次に、表示制御処理について説明する。図4は表示制御処理のフローチャートである。この表示制御処理は、例えば、ナビゲーションシステム1に電源が投入され、操作部4を介した操作入力により車両の走行の目的地が設定された場合に開始され、上述の評価情報取得処理と並行して実行される。
【0047】
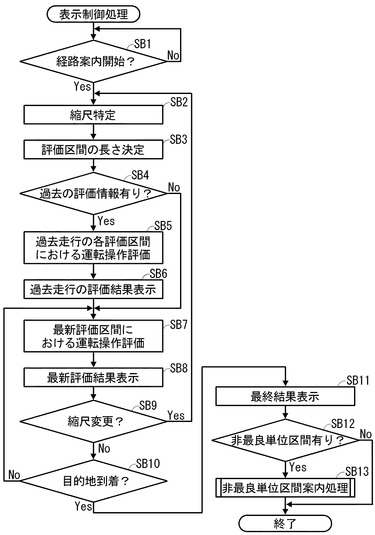
表示制御処理が開始されると、評価部12は、出発地(例えば現在位置検出処理部3により検出された現在位置)から目的地までの経路案内が開始されるまで待機する(SB1、No)。
【0048】
出発地から目的地までの経路案内が開始されると(SB1、Yes)、評価部12は、ディスプレイ5に表示されている地図の縮尺を特定する(SB2)。すなわち評価部12は、出発地から目的地までの経路案内のためにディスプレイ5に表示されている地図の縮尺を特定する。
【0049】
次に評価部12は、SB2で特定した地図の縮尺に基づき、運転者による運転操作を評価するための評価区間の距離を決定する(SB3)。例えば、地図の縮尺と評価区間の距離との対応関係を特定するテーブルを予めデータ記録部20に記録しておき、当該テーブルを参照することにより、評価部12は評価区間の距離を決定する(例えば、縮尺が1/10000の場合には評価区間の距離が100m、縮尺が1/20000の場合には評価区間の距離が200m等)。なお、地図の縮尺が小さくなるほど(ディスプレイ5に表示される地図の表示範囲が広域となるほど)、評価区間の距離が長くなるように決定される。
【0050】
続いて評価部12は、出発地から目的地までの走行経路について、過去の走行時の評価情報取得処理において評価情報DB22に格納された評価情報の有無を判定する(SB4)。例えば評価部12は、SB1で案内が開始された経路の出発地と目的地との座標情報と、SB1で経路案内が開始される以前の日時とに関連付けて、評価情報DB22に評価情報が格納されている場合、出発地から目的地までの走行経路について過去の走行時の評価情報取得処理において評価情報DB22に格納された評価情報が有ると判定する。
【0051】
その結果、出発地から目的地までの走行経路について、過去の走行時の評価情報取得処理において評価情報DB22に格納された評価情報が有る場合(SB4、Yes)、評価部12は、当該過去の走行について、SB3で当該評価部12が決定した距離の各評価区間に含まれる単位区間毎の評価情報を評価情報DB22から取得し、当該取得した評価情報に基づき、各評価区間における運転者による運転操作を評価する(SB5)。なお、過去に出発地から目的地までの走行が複数回行われ、各走行に対応する評価情報が評価情報DB22に格納されている場合には、例えば、出発地から目的地までの最後の走行において取得された評価情報を評価情報DB22から取得する。あるいは、出発地から目的地までの走行に対する最終的な評価結果が最高の評価であった際に取得された評価情報を評価情報DB22から取得する。また、操作部4を介して入力された指示入力に基づき、どの評価情報を評価情報DB22から取得するのかを決定するようにしてもよい。
【0052】
具体的には、評価部12は、出発地から目的地までの走行経路を、SB3で当該評価部12が決定した距離の評価区間に区分する。そして、当該区分した各評価区間の始点と終点との座標情報や、当該評価区間が位置するリンクのリンク番号等に基づき、当該評価区間に含まれる単位区間を特定し、当該特定した各単位区間の評価情報を評価情報DB22から取得する。このように取得した評価情報に基づき、各評価区間において運転者による運転操作が燃費向上に適していた際の車両の走行距離が占める割合を特定し、当該特定した割合に基づき、各評価区間における運転者による運転操作を評価する。
【0053】
例えば車両がガソリン車の場合、評価部12は、各評価区間においてエコランプが点灯した状態で車両が走行した距離が占める割合を特定し、当該特定した割合に基づき、各評価区間における運転者による運転操作を評価する。すなわち評価部12は、評価区間に含まれる各単位区間の評価情報に基づき、当該評価区間においてエコランプが点灯した状態で車両が走行した合計距離を算出する。そして、当該算出した距離を、評価区間の距離で除した値(すなわち、評価区間において運転者による運転操作が燃費向上に適していた際の車両の走行距離が占める割合)が所定の閾値(例えば0.9)以上の場合に、当該評価区間における運転者による運転操作が「良」であると評価し、所定の閾値未満の場合に、当該評価区間における運転者による運転操作が「非良」であると評価する。
【0054】
また、車両がハイブリッド車の場合、評価部12は、各評価区間においてエコドライブインジケータランプが点灯した状態で車両が走行した距離が占める割合、及び、各評価区間においてインジケータが「HVエコゾーン」に該当する状態で車両が走行した距離が占める割合を特定し、当該特定した割合に基づき、各評価区間における運転者による運転操作を評価する。
【0055】
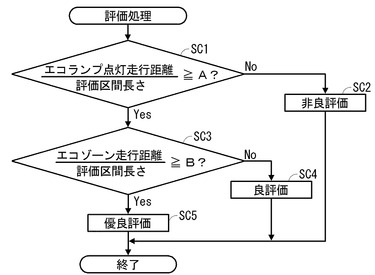
図5は、車両がハイブリッド車の場合において評価部12が各評価区間における運転者による運転操作を評価する際の評価処理のフローチャートである。この図5に示すように、評価処理が開始されると、評価部12は、評価区間に含まれる各単位区間の評価情報に基づき、当該評価区間においてエコドライブインジケータランプが点灯した状態で車両が走行した合計距離を算出し、当該算出した距離を、評価区間の距離で除した値(すなわち、評価区間において運転者による運転操作が燃費向上に適していた際の車両の走行距離が占める割合)が所定の閾値A(例えば0.9)以上か否かを判定する(SC1)。
【0056】
その結果、評価区間においてエコドライブインジケータランプが点灯した状態で車両が走行した距離を評価区間の距離で除した値が所定の閾値A以上ではない(閾値A未満である)場合(SC1、No)、評価部12は当該評価区間における運転者による運転操作が「非良」であると評価する(SC2)。
【0057】
一方、評価区間においてエコドライブインジケータランプが点灯した状態で車両が走行した距離を評価区間の距離で除した値が所定の閾値A以上である場合(SC1、Yes)、評価部12は、評価区間に含まれる各単位区間の評価情報に基づき、当該評価区間においてインジケータが「HVエコゾーン」に該当する状態で車両が走行した合計距離を算出し、当該算出した距離を、評価区間の距離で除した値(すなわち、評価区間において運転者による運転操作が燃費向上に特に適していた際の車両の走行距離が占める割合)が所定の閾値B(例えば0.7)以上か否かを判定する(SC3)。
【0058】
その結果、評価区間においてインジケータが「HVエコゾーン」に該当する状態で車両が走行した距離を評価区間の距離で除した値が所定の閾値B以上ではない(閾値B未満である)場合(SC3、No)、評価部12は当該評価区間における運転者による運転操作が「良」であると評価する(SC4)。
【0059】
一方、評価区間においてインジケータが「HVエコゾーン」に該当する状態で車両が走行した距離を評価区間の距離で除した値が所定の閾値B以上である場合(SC3、Yes)、評価部12は当該評価区間における運転者による運転操作が「優良」であると評価する(SC5)。
【0060】
SC2、SC4、又はSC5の処理の後、評価部12は評価処理を終了する。
【0061】
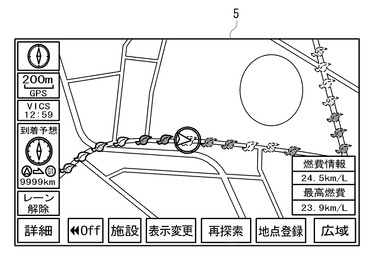
図4に戻り、SB5の処理の後、表示制御部13は、出発地から目的地までの過去の走行について、各評価区間における運転者による運転操作の評価結果を、ディスプレイ5に表示されている地図上の評価区間に対応する位置に表示するための制御を行う(SB6)。図6は、各評価区間における運転者による運転操作の評価結果を表示したディスプレイ5を例示した図である。この図6に示すように、表示制御部13は、出発地から目的地までの過去の走行について、各評価区間における運転者による運転操作の評価結果を示す葉形マークを、各評価区間に対応する位置に表示させる。すなわち、1つの評価区間について1つの葉形マークが表示されている。また、各葉形マークは、各評価区間の評価結果に応じて異なる色彩(図6ではハッチングの濃淡)が付されている。この際、過去の走行についての評価結果であることを示すため、表示制御部13は葉形マークを半透明(図6では点線で表現)としてディスプレイ5に表示させる。ここで、SB3において地図の縮尺に基づき評価区間の距離が適切に決定されているので、隣接する葉形マーク同士が重複することがなく、ユーザにとって視認性の良い表示となっている。
【0062】
図4に戻り、SB4において、出発地から目的地までの走行経路について、過去に評価情報取得処理において評価情報DB22に格納された評価情報が無い場合(SB4、No)、又はSB6の処理の後、評価部12は、今回の走行について、SB3で当該評価部12が決定した距離の最新の評価区間に含まれる単位区間毎の評価情報を評価情報DB22から取得し、当該取得した評価情報に基づき、当該最新の評価区間における運転者による運転操作を評価する(SB7)。具体的には、前回のSB7の処理を行ってから(SB7の処理を初めて行う場合にはSB1で経路案内が開始されてから)車両が評価区間の距離を走行する間に評価情報取得処理で評価情報DB22に格納された評価情報を、当該評価情報DB22から取得する。そして、当該取得した評価情報に基づき、最新の評価区間における運転者による運転操作を評価する。なお、当該最新の評価区間における運転者による運転操作の具体的な評価方法については、図4のSB5で説明した過去の走行についての評価方法と同様であるので、説明を省略する。
【0063】
続いて、表示制御部13は、今回の走行について、最新の評価区間における運転者による運転操作の評価結果を、ディスプレイ5に表示されている地図上の当該評価区間に対応する位置に表示するための制御を行う(SB8)。図6の例では、表示制御部13は、今回の走行について、最新の評価区間における運転者による運転操作の評価結果を示す葉形マークを、当該評価区間に対応する位置に表示させる。この際、今回の走行についての評価結果であることを示すため、表示制御部13は葉形マークを不透明(図6では実線で表現)としてディスプレイ5に表示させる。このように、今回の走行において評価区間を走行する毎に順次評価結果が過去の評価結果を示す葉形マークの上に重畳表示されていくので、過去の走行の評価結果と今回の走行の評価結果とを一見して容易に把握させることができる。
【0064】
図4に戻り、評価部12は、ディスプレイ5に表示されている地図の縮尺が変更されたか否かを判定する(SB9)。その結果、ディスプレイ5に表示されている地図の縮尺が変更された場合(SB9、Yes)、SB2に戻り、ディスプレイ5に表示されている地図の縮尺を特定する(SB2)。
【0065】
一方、ディスプレイ5に表示されている地図の縮尺が変更されていない場合(SB9、No)、評価部12は、車両が目的地に到着したか否かを判定する(SB10)。その結果、車両が目的地に到着していない場合(SB10、No)、SB7に戻り、評価部12は、今回の走行について、最新の評価区間に含まれる単位区間毎の評価情報を評価情報DB22から取得し、当該取得した評価情報に基づき、当該最新の評価区間における運転者による運転操作を評価する(SB7)。以降、車両が目的地に到着するまで、SB7からSB10の処理を繰り返す。これにより、今回の走行の各評価区間における運転者による運転操作の評価結果が、過去の評価結果を示す葉形マークの上に順次重畳表示されていく。
【0066】
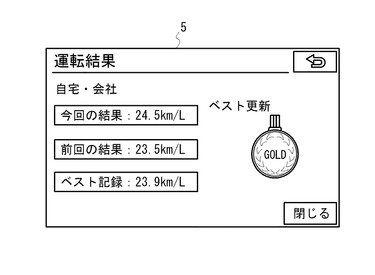
車両が目的地に到着した場合(SB10、Yes)、評価部12は、出発地から目的地までの今回の走行における運転者による運転操作の最終評価を行い、その結果を表示制御部13はディスプレイ5に表示させる(SB11)。例えば評価部12は、出発地から目的地までの今回の走行における車両の走行経路を構成する全ての単位区間における運転者による運転操作を、各単位区間の評価情報に基づいて評価する。そして、走行経路を構成する全ての単位区間のうち、評価結果が最良(例えばガソリン車の場合は「良」、ハイブリッド車の場合は「優良」)であった単位区間の割合に応じて、出発地から目的地までの今回の走行における運転者による運転操作の最終評価を行う(例えば、走行経路を構成する全ての単位区間の評価結果が最良であった場合に「GOLD」、70%以上の単位区間で評価結果が最良であった場合に「SILVER」、評価結果が最良であった単位区間の割合が70%未満の場合に「BRONZE」等)。図7は、最終評価結果を表示するディスプレイ5を例示した図である。この図7に示すように、表示制御部13は、評価部12による評価に基づき、出発地から目的地までの今回の走行における運転者による運転操作の最終評価結果(図7では「GOLD」)をディスプレイ5に表示させる。これと共に、図7の例では、今回の走行の出発地「自宅」及び目的地「会社」、出発地から目的地までの今回の走行における燃費(24.5km/L)、出発地から目的地までの前回の走行における燃費(23.5km/L)、及び出発地から目的地までの過去の走行における最高燃費(23.9km/L)がディスプレイ5に表示されている。
【0067】
図4に戻り、SB11の処理の後、表示制御部13は、車両の走行経路を構成する各単位区間の中に評価結果が最良ではない単位区間(以下、必要に応じて「非最良単位区間」)が存在するか否かを判定する(SB12)。具体的には、評価部12が、出発地から目的地までの今回の走行における車両の走行経路を構成する全ての単位区間における運転者による運転操作を、各単位区間の評価情報に基づいて評価する。その結果、評価結果が最良ではない単位区間がある場合に、表示制御部13は車両の走行経路を構成する各単位区間の中に非最良単位区間が存在すると判定する。
【0068】
その結果、車両の走行経路を構成する各単位区間の中に非最良単位区間が存在しない場合(SB12、No)、制御部10は表示制御処理を終了する。
【0069】
一方、車両の走行経路を構成する各単位区間の中に非最良単位区間が存在する場合(SB12、Yes)、表示制御部13は、非最良単位区間案内処理を実行する(SB13)。その後、制御部10は表示制御処理を終了する。
【0070】
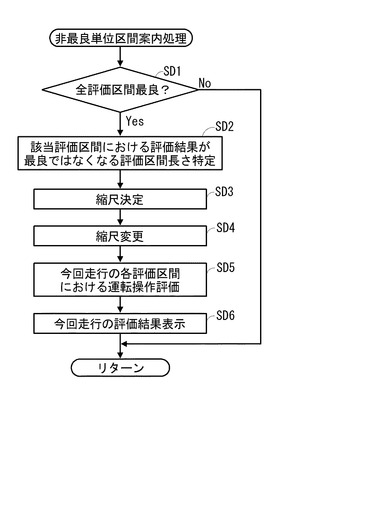
図8は、非最良単位区間案内処理のフローチャートである。この図8に示すように、非最良単位区間案内処理が開始されると、評価部12は、車両の走行経路を構成する全ての評価区間における評価結果が最良か否かを判定する(SD1)。すなわち評価部12は、図4の表示制御処理のSB7で、今回の走行について各評価区間における運転者による運転操作を評価した結果、全ての評価区間における評価結果が最良であったか否かを判定する。
【0071】
その結果、車両の走行経路を構成する全ての評価区間における評価結果が最良ではない場合(SD1、No)、制御部10は非最良単位区間案内処理を終了する。
【0072】
一方、車両の走行経路を構成する全ての評価区間における評価結果が最良である場合(SD1、Yes)、表示制御部13は、非最良単位区間を含む評価区間における評価結果が最良ではなくなる当該評価区間の距離を特定する(SD2)。具体的には、表示制御部13は、図4のSB3で決定された値よりも評価区間の距離を短くし、当該距離を短くした各評価区間の中で非最良単位区間を含む評価区間における運転者による運転操作を評価する。このように、評価区間の距離を段階的に短くしながら(例えば、評価区間の距離を500m、200m、100mと順次短くしながら)、非最良単位区間を含む評価区間における運転者による運転操作を評価し、その評価結果が最良ではなくなった場合の評価区間の距離を特定する。
【0073】
続いて表示制御部13は、SD2で特定した評価区間の距離に基づいて地図の縮尺を決定する(SD3)。例えば表示制御部13は、地図の縮尺と評価区間の距離との対応関係を特定するテーブルを参照することにより、SD2で特定した評価区間の距離に対応する地図の縮尺を決定する(例えば、SD2で特定した評価区間の距離が100mの場合には縮尺が1/10000、SD2で特定した評価区間の距離が200mの場合には縮尺が1/20000等)。
【0074】
続いて表示制御部13は、ディスプレイ5に表示されている地図の縮尺を、SD3で当該表示制御部13が決定した縮尺に変更する(SD4)。
【0075】
そして、表示制御部13は、今回の走行について、SD2で当該表示制御部13が決定した距離の各評価区間に含まれる単位区間毎の評価情報を評価情報DB22から取得し、当該取得した評価情報に基づき、各評価区間における運転者による運転操作を評価する(SD5)。具体的には、今回の走行において車両が目的地に到着するまでの間に評価情報取得処理で評価情報DB22に格納された評価情報を、当該評価情報DB22から取得する。そして、当該取得した評価情報に基づき、各評価区間における運転者による運転操作を評価する。なお、各評価区間における運転者による運転操作の具体的な評価方法については、図4のSB5で説明した過去の走行についての評価方法と同様であるので、説明を省略する。
【0076】
続いて、表示制御部13は、今回の走行について、SD2で当該表示制御部13が決定した距離の各評価区間における運転者による運転操作の評価結果を、ディスプレイ5に表示されている地図上の評価区間に対応する位置に表示するための制御を行う(SD6)。非最良単位区間を含む評価区間については評価結果が最良ではないため、最良ではない評価結果に対応する葉形マークがディスプレイ5上に表示される。これにより、当該評価区間に非最良単位区間が含まれていることをユーザに案内することができる。
【0077】
SD6の処理の後、制御部10は非最良単位区間案内処理を終了し、メインルーチンに戻る。
【0078】
(効果)
このように本実施の形態によれば、評価部12は、運転者による運転操作を評価するための評価区間の距離を、ディスプレイ5に表示されている地図の縮尺に基づいて決定し、当該決定した距離の各評価区間に含まれる単位区間毎の評価情報に基づき、各評価区間における運転者による運転操作を評価し、表示制御部13は、当該評価部12よる評価結果を、ディスプレイ5に表示されている地図上の評価区間に対応する位置に表示するための制御を行うので、地図の縮尺に応じて、ディスプレイ5に表示される各評価結果同士の相互間隔を適切な距離に保持することができ、ユーザにとって視認しやすい態様で、運転者による運転操作の評価結果を地図上に表示することができる。
【0079】
また、表示制御部13は、車両の走行経路を構成する全ての評価区間における評価結果が最良であって、且つ、当該車両の走行経路を構成する各単位区間の中に評価結果が最良ではない単位区間が存在する場合、評価結果が最良ではない単位区間を案内するための制御を行うので、評価区間の距離によっては全ての評価区間における評価結果が最良となる場合においても、評価結果が最良ではない単位区間をユーザに把握させることができ、運転操作を改善可能な区間をユーザに通知することができる。
【0080】
特に、表示制御部13は、車両の走行経路を構成する全ての評価区間における評価結果が最良であって、且つ、当該車両の走行経路を構成する各単位区間の中に評価結果が最良ではない単位区間が存在する場合、当該評価結果が最良ではない単位区間を含む評価区間における評価結果が最良ではなくなる評価区間の距離を特定し、当該特定した距離に基づいて地図の縮尺を決定し、ディスプレイ5に表示されている地図の縮尺を当該決定した縮尺に変更し、縮尺を変更した地図上で評価結果が最良ではない単位区間を案内するための制御を行うので、評価結果が最良ではない単位区間を含む評価区間をユーザに把握させることができ、運転操作を改善可能な区間を一層容易にユーザに把握させることができる。
【0081】
また、評価情報取得部11は、運転者による運転操作が燃費向上に適したものであるか否かを逐次判定し、単位区間毎に、当該単位区間内での判定結果を評価情報として取得し、評価部12は、各評価区間に含まれる単位区間毎の評価情報に基づき、当該各評価区間において運転者による運転操作が燃費向上に適していた際の車両の走行距離が占める割合を特定し、当該特定した割合に基づき、各評価区間における運転者による運転操作を評価するので、各評価区間において運転者が燃費向上に適した運転操作を行った割合に応じて、各評価区間において運転者による運転操作が燃費向上に適したものであるか否かを適切に判定することができる。
【0082】
〔実施の形態に対する変形例〕
以上、本発明に係る実施の形態について説明したが、本発明の具体的な構成及び手段は、特許請求の範囲に記載した各発明の技術的思想の範囲内において、任意に改変及び改良することができる。以下、このような変形例について説明する。
【0083】
(解決しようとする課題や発明の効果について)
まず、発明が解決しようとする課題や発明の効果は、上述の内容に限定されるものではなく、発明の実施環境や構成の細部に応じて異なる可能性があり、上述した課題の一部のみを解決したり、上述した効果の一部のみを奏することがある。
【0084】
(分散や統合について)
また、上述した各電気的構成要素は機能概念的なものであり、必ずしも物理的に図示の如く構成されていることを要しない。すなわち、各部の分散・統合の具体的形態は図示のものに限られず、その全部または一部を、各種の負荷や使用状況などに応じて、任意の単位で機能的または物理的に分散・統合して構成できる。例えば、ナビゲーションシステム1を一体の装置として車両に搭載してもよく、あるいは、ナビゲーションシステム1の一部又は全部(例えば、制御部10における評価部12や、データ記録部20における評価情報DB22等)を、ネットワークを介して車両と通信可能に接続されたセンター装置に設けることとしてもよい。
【0085】
(評価情報取得処理について)
上述の実施の形態では、図2で示した評価情報取得処理のSA2において、評価情報取得部11は、ECU2等からエコランプの点消灯状態を特定するための情報を取得し、当該取得した情報に基づき、エコランプの点消灯状態を逐次判定する場合を例として説明したが、アクセル開度、ブレーキ踏力、動力源の使用状況等を特定するための情報をECU2から直接取得し、当該取得した情報に基づき、運転者による運転操作が燃費向上に適したものであるか否かを当該評価情報取得部11が逐次判定するようにしてもよい。
【0086】
(表示制御処理について)
上述の実施の形態では、図4で示した表示制御処理のSB5において、評価区間においてエコランプが点灯した状態、あるいはインジケータが「HVエコゾーン」に該当する状態で車両が走行した合計距離を算出し、当該算出した距離を評価区間の距離で除した値が所定の閾値以上か否かに基づいて、各評価区間における運転者による運転操作を評価する場合を例として説明したが、運転者のレベルに応じて所定の閾値を変化させてもよい。例えば、所定の閾値を、初級レベルの運転者については0.7、中級レベルの運転者については0.8、上級レベルの運転者については0.9としてもよい。この場合、表示制御処理のSB11における運転者による運転操作の最終評価に応じて、運転者のレベルを決定することとしてもよい。例えば、運転者による運転操作の最終評価が、2回の走行で連続して「GOLD」となった場合に、運転者のレベルを1段階上げるようにしてもよい。
【符号の説明】
【0087】
1 ナビゲーションシステム
2 ECU
3 現在位置検出処理部
4 操作部
5 ディスプレイ
6 スピーカ
10 制御部
11 評価情報取得部
12 評価部
13 表示制御部
20 データ記録部
21 地図情報DB
22 評価情報DB
【技術分野】
【0001】
本発明は、ナビゲーションシステム、ナビゲーション方法、及びナビゲーションプログラムに関する。
【背景技術】
【0002】
従来、車両の走行経路を案内するナビゲーションシステムが用いられている。近年では、燃料費節約や環境保全の観点から省燃費走行への要求が高まっており、車両の走行における燃費低減を目的とした案内を行うナビゲーションシステムも提案されている。
【0003】
例えば、車両の運転状態の情報と当該運転状態でのエコインジケータの点消灯の状態の情報とを逐次取得して記憶部に格納し、ユーザからの要求があった場合に当該記憶部に格納されている複数の運転状態の情報および当該運転状態でのエコインジケータの点消灯の状態の情報をもとに、運転状態と当該運転状態でのエコインジケータの点消灯の状態との時系列に沿った変化を示す表示を行う、携帯機及び車両システムが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−182108号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述の如き従来のシステムは、単にエコインジケータの点消灯の状態の時系列に沿った変化を示す表示を行うものに過ぎなかった。このため、エコインジケータの点消灯の状態を示すマークを地図上に表示することで当該エコインジケータの点消灯の状態の時系列に沿った変化を示す場合、地図の縮尺を小さくするほど(地図の表示範囲を広域とするほど)各マークの相互間隔が縮小してマーク同士の重なりが発生し、ユーザにとって視認性の悪い表示となってしまう可能性があった。
【0006】
本発明は、上記に鑑みてなされたものであって、ユーザにとって視認しやすい態様で、運転者による運転操作の評価結果を地図上に表示することができる、ナビゲーションシステム、ナビゲーション方法、及びナビゲーションプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、請求項1に記載のナビゲーションシステムは、車両の運転者による運転操作を評価する際の指標となる評価情報を、所定距離の単位区間毎に取得する評価情報取得手段と、前記運転者による運転操作を評価するための評価区間の距離を、表示手段に表示されている地図の縮尺に基づいて決定し、当該決定した距離の各評価区間に含まれる前記単位区間毎の前記評価情報に基づき、当該各評価区間における前記運転者による運転操作を評価する評価手段と、前記評価手段による評価結果を、前記表示手段に表示されている地図上の前記各評価区間に対応する位置に表示するための制御を行う表示制御手段と、を備える。
【0008】
また、請求項2に記載のナビゲーションシステムは、請求項1に記載のナビゲーションシステムにおいて、前記評価手段は、前記単位区間毎の前記評価情報に基づき、当該各単位区間における前記運転者による運転操作を評価し、前記表示制御手段は、前記車両の走行経路を構成する全ての前記評価区間における評価結果が最良であって、且つ、当該車両の走行経路を構成する前記各単位区間の中に評価結果が最良ではない単位区間が存在する場合、当該評価結果が最良ではない単位区間を案内するための制御を行う。
【0009】
また、請求項3に記載のナビゲーションシステムは、請求項2に記載のナビゲーションシステムにおいて、前記表示制御手段は、前記車両の走行経路を構成する全ての前記評価区間における評価結果が最良であって、且つ、当該車両の走行経路を構成する前記各単位区間の中に評価結果が最良ではない単位区間が存在する場合、当該評価結果が最良ではない単位区間を含む評価区間における評価結果が最良ではなくなる当該評価区間の距離を特定し、当該特定した距離に基づいて地図の縮尺を決定し、前記表示手段に表示されている地図の縮尺を当該決定した縮尺に変更し、当該縮尺を変更した地図上で当該評価結果が最良ではない単位区間を案内するための制御を行う。
【0010】
また、請求項4に記載のナビゲーションシステムは、請求項1から3のいずれか一項に記載のナビゲーションシステムにおいて、前記評価情報取得手段は、前記運転者による運転操作が燃費向上に適したものであるか否かを逐次判定し、前記単位区間毎に、当該単位区間内での前記判定結果を前記評価情報として取得し、前記評価手段は、前記各評価区間に含まれる前記単位区間毎の前記評価情報に基づき、当該各評価区間において前記運転者による運転操作が燃費向上に適していた際の前記車両の走行距離が占める割合を特定し、当該特定した割合に基づき、各評価区間における前記運転者による運転操作を評価する。
【0011】
また、請求項5に記載のナビゲーション方法は、車両の運転者による運転操作を評価する際の指標となる評価情報を、所定距離の単位区間毎に取得する評価情報取得ステップと、前記運転者による運転操作を評価するための評価区間の距離を、表示手段に表示されている地図の縮尺に基づいて決定し、当該決定した距離の各評価区間に含まれる前記単位区間毎の前記評価情報に基づき、当該各評価区間における前記運転者による運転操作を評価する評価ステップと、前記評価ステップにおける評価結果を、前記表示手段に表示されている地図上の当該評価区間に対応する位置に表示するための制御を行う表示制御ステップと、を含む。
【0012】
また、請求項6に記載のナビゲーションプログラムは、請求項5に記載の方法をコンピュータに実行させる。
【発明の効果】
【0013】
請求項1に記載のナビゲーションシステム、請求項5に記載のナビゲーション方法、及び請求項6に記載のナビゲーションプログラムによれば、評価手段は、運転者による運転操作を評価するための評価区間の距離を、表示手段に表示されている地図の縮尺に基づいて決定し、当該決定した距離の各評価区間に含まれる単位区間毎の評価情報に基づき、各評価区間における運転者による運転操作を評価し、表示制御手段は、当該評価手段よる評価結果を、表示手段に表示されている地図上の評価区間に対応する位置に表示するための制御を行うので、地図の縮尺に応じて、表示手段に表示される各評価結果同士の相互間隔を適切な距離に保持することができ、ユーザにとって視認しやすい態様で、運転者による運転操作の評価結果を地図上に表示することができる。
【0014】
また、請求項2に記載のナビゲーションシステムによれば、表示制御手段は、車両の走行経路を構成する全ての評価区間における評価結果が最良であって、且つ、当該車両の走行経路を構成する各単位区間の中に評価結果が最良ではない単位区間が存在する場合、評価結果が最良ではない単位区間を案内するための制御を行うので、評価区間の距離によっては全ての評価区間における評価結果が最良となる場合においても、評価結果が最良ではない単位区間をユーザに把握させることができ、運転操作を改善可能な区間をユーザに通知することができる。
【0015】
また、請求項3に記載のナビゲーションシステムによれば、表示制御手段は、車両の走行経路を構成する全ての評価区間における評価結果が最良であって、且つ、当該車両の走行経路を構成する各単位区間の中に評価結果が最良ではない単位区間が存在する場合、当該評価結果が最良ではない単位区間を含む評価区間における評価結果が最良ではなくなる評価区間の距離を特定し、当該特定した距離に基づいて地図の縮尺を決定し、表示手段に表示されている地図の縮尺を当該決定した縮尺に変更し、縮尺を変更した地図上で評価結果が最良ではない単位区間を案内するための制御を行うので、評価結果が最良ではない単位区間を含む評価区間をユーザに把握させることができ、運転操作を改善可能な区間を一層容易にユーザに把握させることができる。
【0016】
また、請求項4に記載のナビゲーションシステムによれば、評価情報取得手段は、運転者による運転操作が燃費向上に適したものであるか否かを逐次判定し、単位区間毎に、当該単位区間内での判定結果を評価情報として取得し、評価手段は、各評価区間に含まれる単位区間毎の評価情報に基づき、当該各評価区間において運転者による運転操作が燃費向上に適していた際の車両の走行距離が占める割合を特定し、当該特定した割合に基づき、各評価区間における運転者による運転操作を評価するので、各評価区間において運転者が燃費向上に適した運転操作を行った割合に応じて、各評価区間において運転者による運転操作が燃費向上に適したものであるか否かを適切に判定することができる。
【図面の簡単な説明】
【0017】
【図1】実施の形態に係るナビゲーションシステムを例示するブロック図である。
【図2】評価情報取得処理のフローチャートである。
【図3】エコランプ等を表示するメーターパネルを例示した図であり、図3(a)はガソリン車の場合を例示した図、図3(b)はハイブリッド車の場合を例示した図である。
【図4】表示制御処理のフローチャートである。
【図5】評価処理のフローチャートである。
【図6】各評価区間における運転者による運転操作の評価結果を表示したディスプレイを例示した図である。
【図7】最終評価結果を表示するディスプレイを例示した図である。
【図8】非最良単位区間案内処理のフローチャートである。
【発明を実施するための形態】
【0018】
以下、本発明に係るナビゲーションシステム、ナビゲーション方法、及びナビゲーションプログラムの実施の形態について図面を参照しつつ詳細に説明する。ただし、この実施の形態によって本発明が限定されるものではない。
【0019】
(構成)
最初に、ナビゲーションシステムの構成について説明する。図1は、本実施の形態に係るナビゲーションシステムを例示するブロック図である。ナビゲーションシステム1は例えば車両に搭載されており、図1に示すように、ECU2(Electronic Control Unit)、現在位置検出処理部3、操作部4、ディスプレイ5、及びスピーカ6に接続されている。
【0020】
(構成−ECU)
ECU2は、車両の各部の状態を各種センサを介して監視し、車両のエンジンやモータジェネレータ等の動力系、トランスミッション、駆動系、制動系等(いずれも図示省略)の車両の各部を制御する。例えば、車軸の回転数に比例する車速パルス信号を車速センサから取得してトランスミッションを制御したり、O2センサから取得した排気ガス中の酸素濃度等に基づいて燃料噴射装置(図示省略)を制御する。このECU2から、車速パルス信号や燃料噴射量等の各種情報がナビゲーションシステム1に入力される。
【0021】
(構成−現在位置検出処理部)
現在位置検出処理部3は、車両の現在位置を検出する現在位置検出手段である。具体的には、現在位置検出処理部3は、GPS、地磁気センサ、距離センサ、又はジャイロセンサ(いずれも図示省略)の少なくとも一つを有し、現在の車両の位置(座標)及び方位等を公知の方法にて検出する。
【0022】
(構成−操作部)
操作部4は、ユーザによる操作入力を受け付ける操作手段である。この操作部4の具体的な構成は任意であり、例えば、ディスプレイ5の前面に設けたタッチパネル、押しボタン、リモートコントローラの如き遠隔操作手段、あるいは、音声入力を受け付けるマイクの如き音声認識手段を用いて操作部4を構成することができる。
【0023】
(構成−ディスプレイ)
ディスプレイ5は、ナビゲーションシステム1の制御に基づいて各種情報の表示出力を行う出力手段である。なお、このディスプレイ5の具体的な構成は任意であり、公知の液晶ディスプレイや有機ELディスプレイの如きフラットパネルディスプレイを使用することができる。
【0024】
(構成−スピーカ)
スピーカ6は、ナビゲーションシステム1の制御に基づいて各種の音声を出力する出力手段である。スピーカ6より出力される音声の具体的な態様は任意であり、必要に応じて生成された合成音声や、予め録音された音声を出力することができる。
【0025】
(構成−ナビゲーションシステム)
ナビゲーションシステム1は、制御部10、及びデータ記録部20を備えている。
【0026】
(構成−ナビゲーションシステム−制御部)
制御部10は、ナビゲーションシステム1を制御する制御手段であり、具体的には、CPU、当該CPU上で解釈実行される各種のプログラム(OSなどの基本制御プログラムや、OS上で起動され特定機能を実現するアプリケーションプログラムを含む)、及びプログラムや各種のデータを格納するためのRAMの如き内部メモリを備えて構成されるコンピュータである。特に、本実施の形態に係るナビゲーションプログラムは、任意の記録媒体又はネットワークを介してナビゲーションシステム1にインストールされることで、制御部10の各部を実質的に構成する。
【0027】
この制御部10は、機能概念的に、評価情報取得部11、評価部12、及び表示制御部13を備えている。評価情報取得部11は、車両の運転者による運転操作を評価する際の指標となる評価情報を、所定距離の単位区間毎に取得する評価情報取得手段である。評価部12は、各評価区間における運転者による運転操作を評価する評価手段である。表示制御部13は、評価部12による評価結果を、ディスプレイ5に表示されている地図上の各評価区間に対応する位置に表示するための制御を行う表示制御手段である。これらの制御部10の各部によって実行される処理の詳細については後述する。
【0028】
(構成−ナビゲーションシステム−データ記録部)
データ記録部20は、ナビゲーションシステム1の動作に必要なプログラム及び各種のデータを記録する記録手段であり、例えば、外部記憶装置としてのハードディスク(図示省略)の如き磁気的記録媒体を用いて構成されている。ただし、ハードディスクに代えてあるいはハードディスクと共に、フラッシュメモリの如き半導体型記憶媒体、又はDVDやブルーレイディスクの如き光学的記録媒体を含む、その他の任意の記録媒体を用いることができる。
【0029】
このデータ記録部20は、地図情報データベース21(以下、データベースをDBと略記する)、及び評価情報DB22を備えている。
【0030】
地図情報DB21は、地図情報を格納する地図情報格納手段である。「地図情報」は、例えばリンクデータ(リンク番号、接続ノード番号、道路座標、道路種別、車線数、走行規制等)、ノードデータ(ノード番号、座標)、地物データ(信号機、道路標識、ガードレール、建物等)、施設データ(各施設の位置、各施設の種別等)、地形データ、地図をディスプレイ5に表示するための地図表示データ等を含んで構成されている。
【0031】
評価情報DB22は、車両の運転者による運転操作を評価する際の指標となる評価情報を格納する評価情報格納手段である。なお、評価情報の具体的な内容や、評価情報DB22に評価情報が格納されるタイミング等については後述する。
【0032】
(処理)
次に、このように構成されたナビゲーションシステム1によって実行される処理について説明する。ナビゲーションシステム1によって実行される処理は、評価情報取得処理と表示制御処理とに大別される。
【0033】
(処理−評価情報取得処理)
まず、評価情報取得処理について説明する。図2は評価情報取得処理のフローチャートである(以下の各処理の説明ではステップを「S」と略記する)。この評価情報取得処理は、例えば、ナビゲーションシステム1に電源が投入され、操作部4を介した操作入力により車両の走行の目的地が設定された場合に開始される。ここで、「目的地の設定」とは、操作部4を介した操作入力により最終目的地が設定される場合の他、既に設定されている複数の目的地が操作部4を介した操作入力により並べ替えられ、異なる目的地が最終目的地として設定される場合、あるいは、既に設定されている最終目的地が消去され、他の目的地が最終目的地として設定される場合等も含む(後述する表示制御処理についても同じ)。
【0034】
評価情報取得処理が開始されると、評価情報取得部11は、出発地(例えば現在位置検出処理部3により検出された現在位置)から目的地までの経路案内が開始されるまで待機する(SA1、No)。なお、出発地から目的地までの経路探索や、当該探索結果に基づく経路案内の具体的な内容については、公知の経路探索方法や経路案内方法を用いることができるため、詳細な説明を省略する(後述する表示制御処理についても同じ)。
【0035】
出発地から目的地までの経路案内が開始されると(SA1、Yes)、評価情報取得部11は、運転者による運転操作が燃費向上に適したものであるか否かを逐次(例えば所定の単位時間毎に、あるいは所定の単位距離毎に)判定し、当該判定結果をRAM(図示省略)等に記録する(SA2)。具体的には、運転者による運転操作が燃費向上に適したものであるか否かを示すエコランプが車両のメーターパネル(図示省略)内に表示される場合において、評価情報取得部11は、ECU2等からエコランプの点消灯状態を特定するための情報を取得し、当該取得した情報に基づき、エコランプの点消灯状態を所定の単位時間毎、あるいは所定の単位距離毎に判定する。そして、当該判定結果をRAM等に記録する。なお「エコランプ」には、図3(a)に例示したエコランプ、あるいは図3(b)に例示したエコドライブインジケータランプやインジケータ等が含まれる。
【0036】
図3はエコランプ等を表示するメーターパネルを例示した図であり、図3(a)はガソリン車の場合を例示した図、図3(b)はハイブリッド車の場合を例示した図である。例えば車両がガソリン車の場合には、ECU2から入力されるアクセル開度等の情報に基づき、運転者による運転操作が燃費向上に適したものである場合(例えばアクセル開度が閾値以下の場合)に、図3(a)に示すようにエコランプが点灯される。一方、運転者による運転操作が燃費向上に適したものではない場合(例えばアクセル開度が閾値より大きい場合)、エコランプは消灯される。この場合において、評価情報取得部11は、ECU2等からエコランプの点消灯状態を特定するための情報を取得し、当該取得した情報に基づき、エコランプが点灯しているか否かを所定の単位時間毎、あるいは所定の単位距離毎に判定し、当該判定結果をRAM等に記録する。
【0037】
また、車両がハイブリッド車の場合には、ECU2から入力される動力源の使用状況等の情報に基づき、運転者による運転操作が燃費向上に適したものである場合に、図3(b)に示すようにエコドライブインジケータランプが点灯される。例えば、回生ブレーキが作動している場合や駆動力としてモータのみを使用している場合(図3(b)においてインジケータが「HVエコゾーン」に該当する場合)、あるいは、駆動力としてエンジンも使用しているがエンジン回転数が閾値以下の場合(図3(b)においてインジケータが「エコゾーン」に該当する場合)等に、エコドライブインジケータランプが点灯される。一方、運転者による運転操作が燃費向上に適したものではない場合、例えば駆動力としてエンジンも使用しており、エンジン回転数が閾値より大きい場合(図3(b)においてインジケータが「パワーエリア」に該当する場合)、エコドライブインジケータランプは消灯される。この場合において、評価情報取得部11は、ECU2等からエコドライブインジケータランプやインジケータの点消灯状態を特定するための情報を取得し、当該取得した情報に基づき、エコドライブインジケータランプが点灯しているか否か、及びエコドライブインジケータランプが点灯している場合にはインジケータが「HVエコゾーン」又は「エコゾーン」のいずれに該当するかを所定の単位時間毎、あるいは所定の単位距離毎に判定し、当該判定結果をRAM等に記録する。
【0038】
図2に戻り、SA2の処理の後、評価情報取得部11は、車両が単位区間を走行したか否かを判定する(SA3)。ここで「単位区間」とは、所定距離の区間を意味する。「所定距離」としては、例えば固定値(例えば100m)を用いることができる。あるいは、車両の走行経路を等間隔で区分した距離、すなわち車両の走行経路を構成する単位となる区間の距離を「所定距離」としてもよい。例えば車両の走行経路を構成する100m毎の区間を「単位区間」とした場合、評価情報取得部11は、前回SA3の処理を行ってから(SA3の処理を初めて行う場合にはSA1で経路案内が開始されてから)車両が100m走行した場合に、当該車両が単位区間を走行したと判定する。
【0039】
その結果、車両が単位区間を走行していない場合(SA3、No)、評価情報取得部11はSA2に戻る。以降、車両が単位区間を走行した(SA3、Yes)と判定されるまで、SA2及びSA3の処理を繰り返す。
【0040】
一方、車両が単位区間を走行した場合(SA3、Yes)、評価情報取得部11は、車両が走行した単位区間内での判定結果を評価情報として取得する(SA4)。
【0041】
例えば車両がガソリン車の場合、評価情報取得部11はRAMを参照し、当該車両が単位区間を走行している間における、エコランプが点灯しているか否かの判定結果を評価情報として取得する。具体的には、評価情報取得部11は、車両が走行した単位区間の距離を特定する情報、及び、当該単位区間においてエコランプが点灯した状態で車両が走行した距離を特定する情報等を、評価情報として取得する。
【0042】
また、車両がハイブリッド車の場合、評価情報取得部11はRAMを参照し、当該車両が単位区間を走行している間における、エコドライブインジケータランプが点灯しているか否か、及びエコドライブインジケータランプが点灯している場合にはインジケータが「HVエコゾーン」又は「エコゾーン」のいずれに該当するかの判定結果を評価情報として取得する。具体的には、評価情報取得部11は、車両が走行した単位区間の距離を特定する情報、当該単位区間においてエコドライブインジケータランプが点灯した状態で車両が走行した距離を特定する情報、及び、当該単位区間においてインジケータが「HVエコゾーン」に該当する状態で車両が走行した距離を特定する情報等を、評価情報として取得する。
【0043】
続いて評価情報取得部11は、SA4で取得した評価情報を、車両が走行した単位区間を特定する情報(例えば車両が走行した単位区間の始点と終点との座標情報や、当該単位区間が位置するリンクのリンク番号等)に関連付けて、評価情報DB22に格納する(SA5)。
【0044】
その後、評価情報取得部11は車両が目的地に到着したか否かを判定し(SA6)、目的地に到着していない場合(SA6、No)、SA2に戻る。以降、車両が目的地に到着するまで、SA2からSA6の処理を繰り返す。これにより、車両の運転者による運転操作を評価する際の指標となる評価情報が、所定距離の単位区間毎に取得される。
【0045】
一方、車両が目的地に到着した場合(SA6、Yes)、評価情報取得部11は評価情報取得処理を終了する。この際、評価情報取得部11は、車両が目的地に到着するまでSA5で評価情報DB22に格納された評価情報に関連付けて、車両が走行した走行経路を特定する情報(例えば、出発地と目的地との座標情報)、評価情報が取得された日時を特定する情報、出発地から目的地に至る走行に対する最終的な評価結果を特定する情報等を、当該評価情報DB22に格納する。
【0046】
(処理−表示制御処理)
次に、表示制御処理について説明する。図4は表示制御処理のフローチャートである。この表示制御処理は、例えば、ナビゲーションシステム1に電源が投入され、操作部4を介した操作入力により車両の走行の目的地が設定された場合に開始され、上述の評価情報取得処理と並行して実行される。
【0047】
表示制御処理が開始されると、評価部12は、出発地(例えば現在位置検出処理部3により検出された現在位置)から目的地までの経路案内が開始されるまで待機する(SB1、No)。
【0048】
出発地から目的地までの経路案内が開始されると(SB1、Yes)、評価部12は、ディスプレイ5に表示されている地図の縮尺を特定する(SB2)。すなわち評価部12は、出発地から目的地までの経路案内のためにディスプレイ5に表示されている地図の縮尺を特定する。
【0049】
次に評価部12は、SB2で特定した地図の縮尺に基づき、運転者による運転操作を評価するための評価区間の距離を決定する(SB3)。例えば、地図の縮尺と評価区間の距離との対応関係を特定するテーブルを予めデータ記録部20に記録しておき、当該テーブルを参照することにより、評価部12は評価区間の距離を決定する(例えば、縮尺が1/10000の場合には評価区間の距離が100m、縮尺が1/20000の場合には評価区間の距離が200m等)。なお、地図の縮尺が小さくなるほど(ディスプレイ5に表示される地図の表示範囲が広域となるほど)、評価区間の距離が長くなるように決定される。
【0050】
続いて評価部12は、出発地から目的地までの走行経路について、過去の走行時の評価情報取得処理において評価情報DB22に格納された評価情報の有無を判定する(SB4)。例えば評価部12は、SB1で案内が開始された経路の出発地と目的地との座標情報と、SB1で経路案内が開始される以前の日時とに関連付けて、評価情報DB22に評価情報が格納されている場合、出発地から目的地までの走行経路について過去の走行時の評価情報取得処理において評価情報DB22に格納された評価情報が有ると判定する。
【0051】
その結果、出発地から目的地までの走行経路について、過去の走行時の評価情報取得処理において評価情報DB22に格納された評価情報が有る場合(SB4、Yes)、評価部12は、当該過去の走行について、SB3で当該評価部12が決定した距離の各評価区間に含まれる単位区間毎の評価情報を評価情報DB22から取得し、当該取得した評価情報に基づき、各評価区間における運転者による運転操作を評価する(SB5)。なお、過去に出発地から目的地までの走行が複数回行われ、各走行に対応する評価情報が評価情報DB22に格納されている場合には、例えば、出発地から目的地までの最後の走行において取得された評価情報を評価情報DB22から取得する。あるいは、出発地から目的地までの走行に対する最終的な評価結果が最高の評価であった際に取得された評価情報を評価情報DB22から取得する。また、操作部4を介して入力された指示入力に基づき、どの評価情報を評価情報DB22から取得するのかを決定するようにしてもよい。
【0052】
具体的には、評価部12は、出発地から目的地までの走行経路を、SB3で当該評価部12が決定した距離の評価区間に区分する。そして、当該区分した各評価区間の始点と終点との座標情報や、当該評価区間が位置するリンクのリンク番号等に基づき、当該評価区間に含まれる単位区間を特定し、当該特定した各単位区間の評価情報を評価情報DB22から取得する。このように取得した評価情報に基づき、各評価区間において運転者による運転操作が燃費向上に適していた際の車両の走行距離が占める割合を特定し、当該特定した割合に基づき、各評価区間における運転者による運転操作を評価する。
【0053】
例えば車両がガソリン車の場合、評価部12は、各評価区間においてエコランプが点灯した状態で車両が走行した距離が占める割合を特定し、当該特定した割合に基づき、各評価区間における運転者による運転操作を評価する。すなわち評価部12は、評価区間に含まれる各単位区間の評価情報に基づき、当該評価区間においてエコランプが点灯した状態で車両が走行した合計距離を算出する。そして、当該算出した距離を、評価区間の距離で除した値(すなわち、評価区間において運転者による運転操作が燃費向上に適していた際の車両の走行距離が占める割合)が所定の閾値(例えば0.9)以上の場合に、当該評価区間における運転者による運転操作が「良」であると評価し、所定の閾値未満の場合に、当該評価区間における運転者による運転操作が「非良」であると評価する。
【0054】
また、車両がハイブリッド車の場合、評価部12は、各評価区間においてエコドライブインジケータランプが点灯した状態で車両が走行した距離が占める割合、及び、各評価区間においてインジケータが「HVエコゾーン」に該当する状態で車両が走行した距離が占める割合を特定し、当該特定した割合に基づき、各評価区間における運転者による運転操作を評価する。
【0055】
図5は、車両がハイブリッド車の場合において評価部12が各評価区間における運転者による運転操作を評価する際の評価処理のフローチャートである。この図5に示すように、評価処理が開始されると、評価部12は、評価区間に含まれる各単位区間の評価情報に基づき、当該評価区間においてエコドライブインジケータランプが点灯した状態で車両が走行した合計距離を算出し、当該算出した距離を、評価区間の距離で除した値(すなわち、評価区間において運転者による運転操作が燃費向上に適していた際の車両の走行距離が占める割合)が所定の閾値A(例えば0.9)以上か否かを判定する(SC1)。
【0056】
その結果、評価区間においてエコドライブインジケータランプが点灯した状態で車両が走行した距離を評価区間の距離で除した値が所定の閾値A以上ではない(閾値A未満である)場合(SC1、No)、評価部12は当該評価区間における運転者による運転操作が「非良」であると評価する(SC2)。
【0057】
一方、評価区間においてエコドライブインジケータランプが点灯した状態で車両が走行した距離を評価区間の距離で除した値が所定の閾値A以上である場合(SC1、Yes)、評価部12は、評価区間に含まれる各単位区間の評価情報に基づき、当該評価区間においてインジケータが「HVエコゾーン」に該当する状態で車両が走行した合計距離を算出し、当該算出した距離を、評価区間の距離で除した値(すなわち、評価区間において運転者による運転操作が燃費向上に特に適していた際の車両の走行距離が占める割合)が所定の閾値B(例えば0.7)以上か否かを判定する(SC3)。
【0058】
その結果、評価区間においてインジケータが「HVエコゾーン」に該当する状態で車両が走行した距離を評価区間の距離で除した値が所定の閾値B以上ではない(閾値B未満である)場合(SC3、No)、評価部12は当該評価区間における運転者による運転操作が「良」であると評価する(SC4)。
【0059】
一方、評価区間においてインジケータが「HVエコゾーン」に該当する状態で車両が走行した距離を評価区間の距離で除した値が所定の閾値B以上である場合(SC3、Yes)、評価部12は当該評価区間における運転者による運転操作が「優良」であると評価する(SC5)。
【0060】
SC2、SC4、又はSC5の処理の後、評価部12は評価処理を終了する。
【0061】
図4に戻り、SB5の処理の後、表示制御部13は、出発地から目的地までの過去の走行について、各評価区間における運転者による運転操作の評価結果を、ディスプレイ5に表示されている地図上の評価区間に対応する位置に表示するための制御を行う(SB6)。図6は、各評価区間における運転者による運転操作の評価結果を表示したディスプレイ5を例示した図である。この図6に示すように、表示制御部13は、出発地から目的地までの過去の走行について、各評価区間における運転者による運転操作の評価結果を示す葉形マークを、各評価区間に対応する位置に表示させる。すなわち、1つの評価区間について1つの葉形マークが表示されている。また、各葉形マークは、各評価区間の評価結果に応じて異なる色彩(図6ではハッチングの濃淡)が付されている。この際、過去の走行についての評価結果であることを示すため、表示制御部13は葉形マークを半透明(図6では点線で表現)としてディスプレイ5に表示させる。ここで、SB3において地図の縮尺に基づき評価区間の距離が適切に決定されているので、隣接する葉形マーク同士が重複することがなく、ユーザにとって視認性の良い表示となっている。
【0062】
図4に戻り、SB4において、出発地から目的地までの走行経路について、過去に評価情報取得処理において評価情報DB22に格納された評価情報が無い場合(SB4、No)、又はSB6の処理の後、評価部12は、今回の走行について、SB3で当該評価部12が決定した距離の最新の評価区間に含まれる単位区間毎の評価情報を評価情報DB22から取得し、当該取得した評価情報に基づき、当該最新の評価区間における運転者による運転操作を評価する(SB7)。具体的には、前回のSB7の処理を行ってから(SB7の処理を初めて行う場合にはSB1で経路案内が開始されてから)車両が評価区間の距離を走行する間に評価情報取得処理で評価情報DB22に格納された評価情報を、当該評価情報DB22から取得する。そして、当該取得した評価情報に基づき、最新の評価区間における運転者による運転操作を評価する。なお、当該最新の評価区間における運転者による運転操作の具体的な評価方法については、図4のSB5で説明した過去の走行についての評価方法と同様であるので、説明を省略する。
【0063】
続いて、表示制御部13は、今回の走行について、最新の評価区間における運転者による運転操作の評価結果を、ディスプレイ5に表示されている地図上の当該評価区間に対応する位置に表示するための制御を行う(SB8)。図6の例では、表示制御部13は、今回の走行について、最新の評価区間における運転者による運転操作の評価結果を示す葉形マークを、当該評価区間に対応する位置に表示させる。この際、今回の走行についての評価結果であることを示すため、表示制御部13は葉形マークを不透明(図6では実線で表現)としてディスプレイ5に表示させる。このように、今回の走行において評価区間を走行する毎に順次評価結果が過去の評価結果を示す葉形マークの上に重畳表示されていくので、過去の走行の評価結果と今回の走行の評価結果とを一見して容易に把握させることができる。
【0064】
図4に戻り、評価部12は、ディスプレイ5に表示されている地図の縮尺が変更されたか否かを判定する(SB9)。その結果、ディスプレイ5に表示されている地図の縮尺が変更された場合(SB9、Yes)、SB2に戻り、ディスプレイ5に表示されている地図の縮尺を特定する(SB2)。
【0065】
一方、ディスプレイ5に表示されている地図の縮尺が変更されていない場合(SB9、No)、評価部12は、車両が目的地に到着したか否かを判定する(SB10)。その結果、車両が目的地に到着していない場合(SB10、No)、SB7に戻り、評価部12は、今回の走行について、最新の評価区間に含まれる単位区間毎の評価情報を評価情報DB22から取得し、当該取得した評価情報に基づき、当該最新の評価区間における運転者による運転操作を評価する(SB7)。以降、車両が目的地に到着するまで、SB7からSB10の処理を繰り返す。これにより、今回の走行の各評価区間における運転者による運転操作の評価結果が、過去の評価結果を示す葉形マークの上に順次重畳表示されていく。
【0066】
車両が目的地に到着した場合(SB10、Yes)、評価部12は、出発地から目的地までの今回の走行における運転者による運転操作の最終評価を行い、その結果を表示制御部13はディスプレイ5に表示させる(SB11)。例えば評価部12は、出発地から目的地までの今回の走行における車両の走行経路を構成する全ての単位区間における運転者による運転操作を、各単位区間の評価情報に基づいて評価する。そして、走行経路を構成する全ての単位区間のうち、評価結果が最良(例えばガソリン車の場合は「良」、ハイブリッド車の場合は「優良」)であった単位区間の割合に応じて、出発地から目的地までの今回の走行における運転者による運転操作の最終評価を行う(例えば、走行経路を構成する全ての単位区間の評価結果が最良であった場合に「GOLD」、70%以上の単位区間で評価結果が最良であった場合に「SILVER」、評価結果が最良であった単位区間の割合が70%未満の場合に「BRONZE」等)。図7は、最終評価結果を表示するディスプレイ5を例示した図である。この図7に示すように、表示制御部13は、評価部12による評価に基づき、出発地から目的地までの今回の走行における運転者による運転操作の最終評価結果(図7では「GOLD」)をディスプレイ5に表示させる。これと共に、図7の例では、今回の走行の出発地「自宅」及び目的地「会社」、出発地から目的地までの今回の走行における燃費(24.5km/L)、出発地から目的地までの前回の走行における燃費(23.5km/L)、及び出発地から目的地までの過去の走行における最高燃費(23.9km/L)がディスプレイ5に表示されている。
【0067】
図4に戻り、SB11の処理の後、表示制御部13は、車両の走行経路を構成する各単位区間の中に評価結果が最良ではない単位区間(以下、必要に応じて「非最良単位区間」)が存在するか否かを判定する(SB12)。具体的には、評価部12が、出発地から目的地までの今回の走行における車両の走行経路を構成する全ての単位区間における運転者による運転操作を、各単位区間の評価情報に基づいて評価する。その結果、評価結果が最良ではない単位区間がある場合に、表示制御部13は車両の走行経路を構成する各単位区間の中に非最良単位区間が存在すると判定する。
【0068】
その結果、車両の走行経路を構成する各単位区間の中に非最良単位区間が存在しない場合(SB12、No)、制御部10は表示制御処理を終了する。
【0069】
一方、車両の走行経路を構成する各単位区間の中に非最良単位区間が存在する場合(SB12、Yes)、表示制御部13は、非最良単位区間案内処理を実行する(SB13)。その後、制御部10は表示制御処理を終了する。
【0070】
図8は、非最良単位区間案内処理のフローチャートである。この図8に示すように、非最良単位区間案内処理が開始されると、評価部12は、車両の走行経路を構成する全ての評価区間における評価結果が最良か否かを判定する(SD1)。すなわち評価部12は、図4の表示制御処理のSB7で、今回の走行について各評価区間における運転者による運転操作を評価した結果、全ての評価区間における評価結果が最良であったか否かを判定する。
【0071】
その結果、車両の走行経路を構成する全ての評価区間における評価結果が最良ではない場合(SD1、No)、制御部10は非最良単位区間案内処理を終了する。
【0072】
一方、車両の走行経路を構成する全ての評価区間における評価結果が最良である場合(SD1、Yes)、表示制御部13は、非最良単位区間を含む評価区間における評価結果が最良ではなくなる当該評価区間の距離を特定する(SD2)。具体的には、表示制御部13は、図4のSB3で決定された値よりも評価区間の距離を短くし、当該距離を短くした各評価区間の中で非最良単位区間を含む評価区間における運転者による運転操作を評価する。このように、評価区間の距離を段階的に短くしながら(例えば、評価区間の距離を500m、200m、100mと順次短くしながら)、非最良単位区間を含む評価区間における運転者による運転操作を評価し、その評価結果が最良ではなくなった場合の評価区間の距離を特定する。
【0073】
続いて表示制御部13は、SD2で特定した評価区間の距離に基づいて地図の縮尺を決定する(SD3)。例えば表示制御部13は、地図の縮尺と評価区間の距離との対応関係を特定するテーブルを参照することにより、SD2で特定した評価区間の距離に対応する地図の縮尺を決定する(例えば、SD2で特定した評価区間の距離が100mの場合には縮尺が1/10000、SD2で特定した評価区間の距離が200mの場合には縮尺が1/20000等)。
【0074】
続いて表示制御部13は、ディスプレイ5に表示されている地図の縮尺を、SD3で当該表示制御部13が決定した縮尺に変更する(SD4)。
【0075】
そして、表示制御部13は、今回の走行について、SD2で当該表示制御部13が決定した距離の各評価区間に含まれる単位区間毎の評価情報を評価情報DB22から取得し、当該取得した評価情報に基づき、各評価区間における運転者による運転操作を評価する(SD5)。具体的には、今回の走行において車両が目的地に到着するまでの間に評価情報取得処理で評価情報DB22に格納された評価情報を、当該評価情報DB22から取得する。そして、当該取得した評価情報に基づき、各評価区間における運転者による運転操作を評価する。なお、各評価区間における運転者による運転操作の具体的な評価方法については、図4のSB5で説明した過去の走行についての評価方法と同様であるので、説明を省略する。
【0076】
続いて、表示制御部13は、今回の走行について、SD2で当該表示制御部13が決定した距離の各評価区間における運転者による運転操作の評価結果を、ディスプレイ5に表示されている地図上の評価区間に対応する位置に表示するための制御を行う(SD6)。非最良単位区間を含む評価区間については評価結果が最良ではないため、最良ではない評価結果に対応する葉形マークがディスプレイ5上に表示される。これにより、当該評価区間に非最良単位区間が含まれていることをユーザに案内することができる。
【0077】
SD6の処理の後、制御部10は非最良単位区間案内処理を終了し、メインルーチンに戻る。
【0078】
(効果)
このように本実施の形態によれば、評価部12は、運転者による運転操作を評価するための評価区間の距離を、ディスプレイ5に表示されている地図の縮尺に基づいて決定し、当該決定した距離の各評価区間に含まれる単位区間毎の評価情報に基づき、各評価区間における運転者による運転操作を評価し、表示制御部13は、当該評価部12よる評価結果を、ディスプレイ5に表示されている地図上の評価区間に対応する位置に表示するための制御を行うので、地図の縮尺に応じて、ディスプレイ5に表示される各評価結果同士の相互間隔を適切な距離に保持することができ、ユーザにとって視認しやすい態様で、運転者による運転操作の評価結果を地図上に表示することができる。
【0079】
また、表示制御部13は、車両の走行経路を構成する全ての評価区間における評価結果が最良であって、且つ、当該車両の走行経路を構成する各単位区間の中に評価結果が最良ではない単位区間が存在する場合、評価結果が最良ではない単位区間を案内するための制御を行うので、評価区間の距離によっては全ての評価区間における評価結果が最良となる場合においても、評価結果が最良ではない単位区間をユーザに把握させることができ、運転操作を改善可能な区間をユーザに通知することができる。
【0080】
特に、表示制御部13は、車両の走行経路を構成する全ての評価区間における評価結果が最良であって、且つ、当該車両の走行経路を構成する各単位区間の中に評価結果が最良ではない単位区間が存在する場合、当該評価結果が最良ではない単位区間を含む評価区間における評価結果が最良ではなくなる評価区間の距離を特定し、当該特定した距離に基づいて地図の縮尺を決定し、ディスプレイ5に表示されている地図の縮尺を当該決定した縮尺に変更し、縮尺を変更した地図上で評価結果が最良ではない単位区間を案内するための制御を行うので、評価結果が最良ではない単位区間を含む評価区間をユーザに把握させることができ、運転操作を改善可能な区間を一層容易にユーザに把握させることができる。
【0081】
また、評価情報取得部11は、運転者による運転操作が燃費向上に適したものであるか否かを逐次判定し、単位区間毎に、当該単位区間内での判定結果を評価情報として取得し、評価部12は、各評価区間に含まれる単位区間毎の評価情報に基づき、当該各評価区間において運転者による運転操作が燃費向上に適していた際の車両の走行距離が占める割合を特定し、当該特定した割合に基づき、各評価区間における運転者による運転操作を評価するので、各評価区間において運転者が燃費向上に適した運転操作を行った割合に応じて、各評価区間において運転者による運転操作が燃費向上に適したものであるか否かを適切に判定することができる。
【0082】
〔実施の形態に対する変形例〕
以上、本発明に係る実施の形態について説明したが、本発明の具体的な構成及び手段は、特許請求の範囲に記載した各発明の技術的思想の範囲内において、任意に改変及び改良することができる。以下、このような変形例について説明する。
【0083】
(解決しようとする課題や発明の効果について)
まず、発明が解決しようとする課題や発明の効果は、上述の内容に限定されるものではなく、発明の実施環境や構成の細部に応じて異なる可能性があり、上述した課題の一部のみを解決したり、上述した効果の一部のみを奏することがある。
【0084】
(分散や統合について)
また、上述した各電気的構成要素は機能概念的なものであり、必ずしも物理的に図示の如く構成されていることを要しない。すなわち、各部の分散・統合の具体的形態は図示のものに限られず、その全部または一部を、各種の負荷や使用状況などに応じて、任意の単位で機能的または物理的に分散・統合して構成できる。例えば、ナビゲーションシステム1を一体の装置として車両に搭載してもよく、あるいは、ナビゲーションシステム1の一部又は全部(例えば、制御部10における評価部12や、データ記録部20における評価情報DB22等)を、ネットワークを介して車両と通信可能に接続されたセンター装置に設けることとしてもよい。
【0085】
(評価情報取得処理について)
上述の実施の形態では、図2で示した評価情報取得処理のSA2において、評価情報取得部11は、ECU2等からエコランプの点消灯状態を特定するための情報を取得し、当該取得した情報に基づき、エコランプの点消灯状態を逐次判定する場合を例として説明したが、アクセル開度、ブレーキ踏力、動力源の使用状況等を特定するための情報をECU2から直接取得し、当該取得した情報に基づき、運転者による運転操作が燃費向上に適したものであるか否かを当該評価情報取得部11が逐次判定するようにしてもよい。
【0086】
(表示制御処理について)
上述の実施の形態では、図4で示した表示制御処理のSB5において、評価区間においてエコランプが点灯した状態、あるいはインジケータが「HVエコゾーン」に該当する状態で車両が走行した合計距離を算出し、当該算出した距離を評価区間の距離で除した値が所定の閾値以上か否かに基づいて、各評価区間における運転者による運転操作を評価する場合を例として説明したが、運転者のレベルに応じて所定の閾値を変化させてもよい。例えば、所定の閾値を、初級レベルの運転者については0.7、中級レベルの運転者については0.8、上級レベルの運転者については0.9としてもよい。この場合、表示制御処理のSB11における運転者による運転操作の最終評価に応じて、運転者のレベルを決定することとしてもよい。例えば、運転者による運転操作の最終評価が、2回の走行で連続して「GOLD」となった場合に、運転者のレベルを1段階上げるようにしてもよい。
【符号の説明】
【0087】
1 ナビゲーションシステム
2 ECU
3 現在位置検出処理部
4 操作部
5 ディスプレイ
6 スピーカ
10 制御部
11 評価情報取得部
12 評価部
13 表示制御部
20 データ記録部
21 地図情報DB
22 評価情報DB
【特許請求の範囲】
【請求項1】
車両の運転者による運転操作を評価する際の指標となる評価情報を、所定距離の単位区間毎に取得する評価情報取得手段と、
前記運転者による運転操作を評価するための評価区間の距離を、表示手段に表示されている地図の縮尺に基づいて決定し、当該決定した距離の各評価区間に含まれる前記単位区間毎の前記評価情報に基づき、当該各評価区間における前記運転者による運転操作を評価する評価手段と、
前記評価手段による評価結果を、前記表示手段に表示されている地図上の前記各評価区間に対応する位置に表示するための制御を行う表示制御手段と、
を備えるナビゲーションシステム。
【請求項2】
前記評価手段は、前記単位区間毎の前記評価情報に基づき、当該各単位区間における前記運転者による運転操作を評価し、
前記表示制御手段は、前記車両の走行経路を構成する全ての前記評価区間における評価結果が最良であって、且つ、当該車両の走行経路を構成する前記各単位区間の中に評価結果が最良ではない単位区間が存在する場合、当該評価結果が最良ではない単位区間を案内するための制御を行う、
請求項1に記載のナビゲーションシステム。
【請求項3】
前記表示制御手段は、前記車両の走行経路を構成する全ての前記評価区間における評価結果が最良であって、且つ、当該車両の走行経路を構成する前記各単位区間の中に評価結果が最良ではない単位区間が存在する場合、当該評価結果が最良ではない単位区間を含む評価区間における評価結果が最良ではなくなる当該評価区間の距離を特定し、当該特定した距離に基づいて地図の縮尺を決定し、前記表示手段に表示されている地図の縮尺を当該決定した縮尺に変更し、当該縮尺を変更した地図上で当該評価結果が最良ではない単位区間を案内するための制御を行う、
請求項2に記載のナビゲーションシステム。
【請求項4】
前記評価情報取得手段は、前記運転者による運転操作が燃費向上に適したものであるか否かを逐次判定し、前記単位区間毎に、当該単位区間内での前記判定結果を前記評価情報として取得し、
前記評価手段は、前記各評価区間に含まれる前記単位区間毎の前記評価情報に基づき、当該各評価区間において前記運転者による運転操作が燃費向上に適していた際の前記車両の走行距離が占める割合を特定し、当該特定した割合に基づき、各評価区間における前記運転者による運転操作を評価する、
請求項1から3のいずれか一項に記載のナビゲーションシステム。
【請求項5】
車両の運転者による運転操作を評価する際の指標となる評価情報を、所定距離の単位区間毎に取得する評価情報取得ステップと、
前記運転者による運転操作を評価するための評価区間の距離を、表示手段に表示されている地図の縮尺に基づいて決定し、当該決定した距離の各評価区間に含まれる前記単位区間毎の前記評価情報に基づき、当該各評価区間における前記運転者による運転操作を評価する評価ステップと、
前記評価ステップにおける評価結果を、前記表示手段に表示されている地図上の当該評価区間に対応する位置に表示するための制御を行う表示制御ステップと、
を含むナビゲーション方法。
【請求項6】
請求項5に記載の方法をコンピュータに実行させるナビゲーションプログラム。
【請求項1】
車両の運転者による運転操作を評価する際の指標となる評価情報を、所定距離の単位区間毎に取得する評価情報取得手段と、
前記運転者による運転操作を評価するための評価区間の距離を、表示手段に表示されている地図の縮尺に基づいて決定し、当該決定した距離の各評価区間に含まれる前記単位区間毎の前記評価情報に基づき、当該各評価区間における前記運転者による運転操作を評価する評価手段と、
前記評価手段による評価結果を、前記表示手段に表示されている地図上の前記各評価区間に対応する位置に表示するための制御を行う表示制御手段と、
を備えるナビゲーションシステム。
【請求項2】
前記評価手段は、前記単位区間毎の前記評価情報に基づき、当該各単位区間における前記運転者による運転操作を評価し、
前記表示制御手段は、前記車両の走行経路を構成する全ての前記評価区間における評価結果が最良であって、且つ、当該車両の走行経路を構成する前記各単位区間の中に評価結果が最良ではない単位区間が存在する場合、当該評価結果が最良ではない単位区間を案内するための制御を行う、
請求項1に記載のナビゲーションシステム。
【請求項3】
前記表示制御手段は、前記車両の走行経路を構成する全ての前記評価区間における評価結果が最良であって、且つ、当該車両の走行経路を構成する前記各単位区間の中に評価結果が最良ではない単位区間が存在する場合、当該評価結果が最良ではない単位区間を含む評価区間における評価結果が最良ではなくなる当該評価区間の距離を特定し、当該特定した距離に基づいて地図の縮尺を決定し、前記表示手段に表示されている地図の縮尺を当該決定した縮尺に変更し、当該縮尺を変更した地図上で当該評価結果が最良ではない単位区間を案内するための制御を行う、
請求項2に記載のナビゲーションシステム。
【請求項4】
前記評価情報取得手段は、前記運転者による運転操作が燃費向上に適したものであるか否かを逐次判定し、前記単位区間毎に、当該単位区間内での前記判定結果を前記評価情報として取得し、
前記評価手段は、前記各評価区間に含まれる前記単位区間毎の前記評価情報に基づき、当該各評価区間において前記運転者による運転操作が燃費向上に適していた際の前記車両の走行距離が占める割合を特定し、当該特定した割合に基づき、各評価区間における前記運転者による運転操作を評価する、
請求項1から3のいずれか一項に記載のナビゲーションシステム。
【請求項5】
車両の運転者による運転操作を評価する際の指標となる評価情報を、所定距離の単位区間毎に取得する評価情報取得ステップと、
前記運転者による運転操作を評価するための評価区間の距離を、表示手段に表示されている地図の縮尺に基づいて決定し、当該決定した距離の各評価区間に含まれる前記単位区間毎の前記評価情報に基づき、当該各評価区間における前記運転者による運転操作を評価する評価ステップと、
前記評価ステップにおける評価結果を、前記表示手段に表示されている地図上の当該評価区間に対応する位置に表示するための制御を行う表示制御ステップと、
を含むナビゲーション方法。
【請求項6】
請求項5に記載の方法をコンピュータに実行させるナビゲーションプログラム。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−15433(P2013−15433A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−148878(P2011−148878)
【出願日】平成23年7月5日(2011.7.5)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年7月5日(2011.7.5)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]