
ナビゲーションシステム、ナビゲーション装置、およびナビゲーションシステムの動作方法
【課題】後続車両においてユーザーに伝える情報の精度を向上させることが可能な技術を提供する。
【解決手段】ナビゲーションシステムは、車線を走行する情報提供車両ANの走行履歴情報TRKNに基づいて第1渋滞開始地点(第1渋滞終了地点)を検出可能であり、情報提供車両ANのあとを走行する情報提供車両AN+1の走行履歴情報TRKN+1に基づいて第2渋滞開始地点(第2渋滞終了地点)を検出可能な渋滞地点検出部と、第1渋滞開始地点と第2渋滞開始地点とを用いて渋滞開始地点の変化量を算出し、当該変化量に基づいて、第2渋滞開始地点よりも時間的に後の渋滞開始地点を予測した予測渋滞開始地点を取得する渋滞状況予測部と、情報提供車両AN+1の後続車両において、予測渋滞開始地点(予測渋滞終了地点)を用いて情報の提供を行う情報提供手段とを備える。
【解決手段】ナビゲーションシステムは、車線を走行する情報提供車両ANの走行履歴情報TRKNに基づいて第1渋滞開始地点(第1渋滞終了地点)を検出可能であり、情報提供車両ANのあとを走行する情報提供車両AN+1の走行履歴情報TRKN+1に基づいて第2渋滞開始地点(第2渋滞終了地点)を検出可能な渋滞地点検出部と、第1渋滞開始地点と第2渋滞開始地点とを用いて渋滞開始地点の変化量を算出し、当該変化量に基づいて、第2渋滞開始地点よりも時間的に後の渋滞開始地点を予測した予測渋滞開始地点を取得する渋滞状況予測部と、情報提供車両AN+1の後続車両において、予測渋滞開始地点(予測渋滞終了地点)を用いて情報の提供を行う情報提供手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、交通情報の取得技術に関する。
【背景技術】
【0002】
一般的に、渋滞情報を自動車等の車両へ伝達する手段としては、VICSおよびビーコン等の手段がある。しかし、これらの情報伝達手段では、センサーが設置されていないエリアでは渋滞情報を得ることができず、またセンサーが設置されたエリアにおいて渋滞情報が得られたとしても、得られた渋滞情報は、地図上の限られた範囲の情報であるため、当該範囲外の所望範囲の情報を得るには、当該所望範囲の渋滞情報を受信可能なエリアに入らなければ、所望範囲の渋滞情報を得ることができない等、情報のリアルタイム性が悪かった。
【0003】
そこで、情報のリアルタイム性を改善するために、車両間の通信で情報を得る手段が提案されている。
【0004】
例えば、特許文献1では、前後車両との間で通信を行うことによって情報を伝達する手段が提案されている。
【0005】
また、特許文献2では、対向車線を走行する車両に、自車の情報を伝達して自車の後方を走行する後続車両に渋滞情報を伝達する手段が提案されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−148901号公報
【特許文献2】特開2007−147307号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1の技術では、進行方向の渋滞情報を得ることができるが、交通量が少なく通信範囲内に車両が走行していない場合、或いは交差点または信号待ち等によって、前後車両が離れて車両間の距離が通信距離外となった場合、後方車両には、渋滞情報が伝達されなくなる。
【0008】
これに対して、特許文献2の技術によれば、車両間が離れた場合でも、後続車両に渋滞情報を伝達することができるが、特許文献2では、渋滞中の車両から走行履歴情報を受けて渋滞車線の後続車両に当該走行履歴情報を伝えるだけであるため、後続車両においてユーザーに伝える情報の精度が低かった。
【0009】
そこで、本発明は、後続車両においてユーザーに伝える情報の精度を向上させることが可能な技術を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明に係るナビゲーションシステムは、車線を走行する第1車両の第1走行履歴情報に基づいて第1交通状態を検出可能であり、前記第1車両のあとを走行する第2車両の第2走行履歴情報に基づいて第2交通状態を検出可能な検出手段と、前記第1交通状態と前記第2交通状態とを用いて前記車線における交通状態の変化量を算出し、当該変化量に基づいて、前記第2交通状態よりも時間的に後の前記車線における交通状態を予測した予測交通状態を取得する予測手段と、前記第2車両の後続車両において、前記予測交通状態を用いて情報の提供を行う情報提供手段とを備える。
【0011】
また、本発明に係るナビゲーション装置は、対向車線を走行する対向車と通信可能な通信手段と、前記対向車線を走行する第1対向車から前記通信手段を用いて取得した第1走行履歴情報に基づいて、第1交通状態を検出するとともに、前記第1対向車のあとを走行する第2対向車から前記通信手段を用いて取得した第2走行履歴情報に基づいて、第2交通状態を検出する検出手段と、前記第1交通状態と前記第2交通状態とを用いて前記対向車線における交通状態の変化量を算出し、当該変化量に基づいて、前記第2交通状態よりも時間的に後の前記対向車線における交通状態を予測した予測交通状態を取得する予測手段とを備え、前記通信手段は、前記予測交通状態を前記第2対向車の後続車両に送信する。
【0012】
また、本発明に係るナビゲーションシステムの動作方法は、a)車線を走行する第1車両の第1走行履歴情報に基づいて第1交通状態を検出する工程と、b)前記第1車両のあとを走行する第2車両の第2走行履歴情報に基づいて第2交通状態を検出する工程と、c)前記第1交通状態と前記第2交通状態とを用いて前記車線における交通状態の変化量を算出し、当該変化量に基づいて、前記第2交通状態よりも時間的に後の前記車線における交通状態を予測した予測交通状態を取得する工程と、d)前記第2車両の後続車両において、前記予測交通状態を用いて情報の提供を行う工程とを備える。
【発明の効果】
【0013】
本発明によれば、後続車両においてユーザーに伝える情報の精度を向上させることが可能になる。
【図面の簡単な説明】
【0014】
【図1】実施形態に係るナビゲーション装置の構成を示す図である。
【図2】走行履歴情報の内容を示す図である。
【図3】本実施形態に係るナビゲーション装置を用いたナビゲーションシステムの概略図である。
【図4】渋滞開始地点情報を取得する際のナビゲーション装置の動作を示すフローチャートである。
【図5】情報提供車両から取得される走行履歴情報と、情報提供車両から取得される走行履歴情報とを示す図である。
【図6】走行経路上での距離差を例示する図である。
【図7】渋滞終了地点情報を取得する際のナビゲーション装置の動作を示すフローチャートである。
【図8】情報提供車両の走行経路の例外パターンを示す図である。
【図9】情報収集車両の走行経路の例外パターンを示す図である。
【発明を実施するための形態】
【0015】
以下、実施形態について図面を参照して説明する。
【0016】
<1.実施形態>
[1−1.構成および概要]
図1は、実施形態に係るナビゲーション装置1の構成を示す図である。図2は、走行履歴情報の内容を示す図である。
【0017】
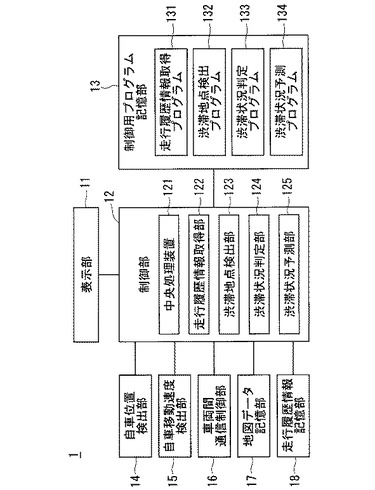
図1に示されるように、ナビゲーション装置1は、地図、経路、交通情報等の画像を表示するための表示部11と、ナビゲーション装置1の全体制御を行う制御部12と、全体制御を行うための制御用プログラムを記憶した制御用プログラム記憶部13とを備えている。
【0018】
表示部11は、ユーザーに対して情報を提供する情報提供手段として機能する。なお、音声によりユーザーに対して情報を提供する発声手段(不図示)も当該情報提供手段に含めてもよい。
【0019】
制御用プログラム記憶部13は、例えば、ROM等で構成されている。当該制御用プログラム記憶部13は、走行情報を取得して記憶するための走行履歴情報取得プログラム131と、走行履歴情報から渋滞の開始地点と終了地点とを検出するための渋滞地点検出プログラム132と、渋滞地点情報から渋滞状況を判定する渋滞状況判定プログラム133と、渋滞状況の情報から現在時刻での渋滞開始地点と渋滞終了地点を予測する計算を行う渋滞状況予測プログラム134とを記憶している。
【0020】
これら各プログラム131〜134は、制御部12によって読み出されて、制御部12の中央処理装置(CPU)121において実行される。
【0021】
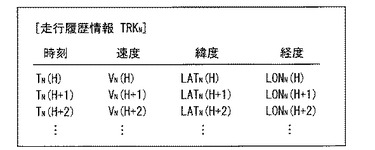
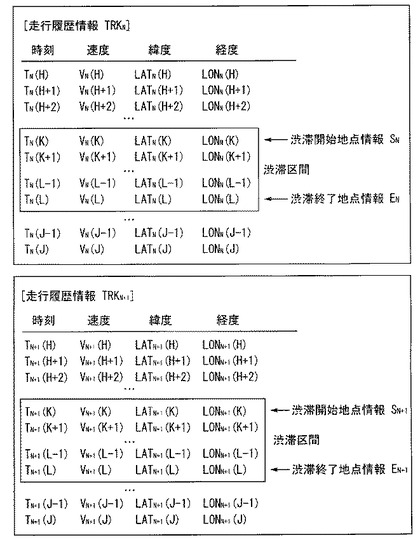
例えば、走行履歴情報取得プログラム131がCPU121で実行されると、制御部12では、走行履歴情報取得部122が機能的に実現される。走行履歴情報取得部122は、後述の自車位置検出部14および自車移動速度検出部15の検出結果を用いて走行履歴情報を取得する。図2に示されるように、走行履歴情報は、時刻とその時刻における自車位置情報と移動速度とを含む情報であり、所定間隔(例えば、2秒)ごとに取得される情報である。
【0022】
また、例えば、渋滞地点検出プログラム132がCPU121で実行されると、制御部12では、渋滞地点検出部(検出手段)123が機能的に実現される。渋滞地点検出部123は、走行履歴情報に基づいて、渋滞の開始地点と渋滞終了地点とを検出する。
【0023】
また、例えば、渋滞状況判定プログラム133がCPU121で実行されると、制御部12では、渋滞状況判定部124が機能的に実現される。渋滞状況判定部124は、渋滞の開始地点および終了地点に関する情報(渋滞地点情報)に基づいて渋滞状況の判定・計算を行う。
【0024】
また、例えば、渋滞状況予測プログラム134がCPU121で実行されると、制御部12では、渋滞状況予測部(予測手段)125が機能的に実現される。渋滞状況予測部125は、渋滞地点情報から現在時刻における渋滞開始地点と渋滞終了地点とを予測して算出する。
【0025】
また、ナビゲーション装置1は、自車位置検出部14と、自車移動速度検出部15と、車両間通信制御部16と、地図データ記憶部17と、走行履歴情報記憶部18とを備えている。
【0026】
自車位置検出部14は、GPS(Global Positioning System)装置、ヨーレートセンサーおよび加速度センサー等から構成され、自車の位置(自車位置)に関する情報(「自車位置情報」とも称する)を検出する。自車位置検出部14は、例えば、経度および緯度で表される絶対座標上での位置を自車位置情報として検出する。
【0027】
自車移動速度検出部15は、車輪の回転速度に応じた車速パルスを取得し、当該車速パルスに基づいて、自車の移動速度に関する情報(速度情報)を検出する。
【0028】
車両間通信制御部16は、他の車両のナビゲーション装置と無線通信を行う通信手段として機能する。
【0029】
地図データ記憶部17は、ハードディスクドライブ、DVD等から構成され、地図データを記憶している。
【0030】
走行履歴情報記憶部18は、ハードディスクドライブ、フラッシュメモリ、SDRAM等から構成され、走行履歴情報取得部122によって取得された走行履歴情報を記憶する。走行履歴情報記憶部18に蓄積される走行履歴情報は、車両間通信制御部16によって、対向車線を走行する車両に送信される。
【0031】
ここで、上記のような構成を有するナビゲーション装置1が、道路を走行する各車両に搭載された場合を想定する。図3は、本実施形態に係るナビゲーション装置1を用いたナビゲーションシステムの概略図である。
【0032】
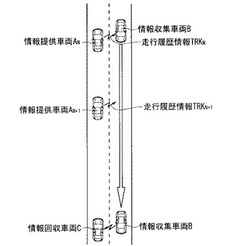
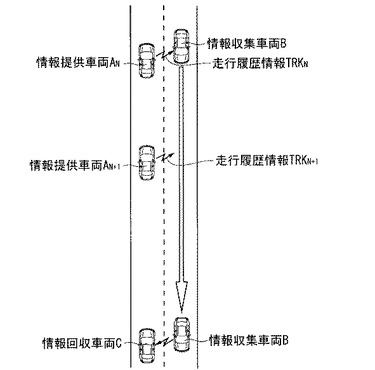
図3では、ナビゲーション装置1を搭載した各車両が道路を走行している様子が示されている。具体的には、第1車両ANと第2車両AN+1と第3車両Cとが渋滞の発生している同一の車線(渋滞車線)を走行し、第4車両Bが対向車線を走行している。
【0033】
この場合、第1車両ANおよび第2車両AN+1は、対向車線を走行する第4車両Bに走行履歴情報を提供する情報提供車両としての役割を担い、第4車両Bは、すれ違う第1車両ANおよび第2車両AN+1から走行履歴情報を収集する情報収集車両としての役割を担う。すなわち、情報収集車両(第4車両)Bは、対向して走行する第1車両ANおよび第2車両AN+1から順次に第1車両ANの走行履歴情報TRKNおよび第2車両AN+1の走行履歴情報TRKN+1を取得する。
【0034】
なお、第2車両AN+1は第1車両ANの後を走行する車両群の中の1つであり、第4車両Bが走行履歴情報を第1車両ANから受信した後、次に走行履歴情報を受信する車両を意味しており、第1車両ANの直後を走行する車両に限定されない。
【0035】
情報収集車両Bは、第1車両ANの走行履歴情報TRKNに基づいて渋滞車線における交通状態(例えば渋滞開始地点、渋滞終了地点)を検出するとともに、第2車両AN+1の走行履歴情報TRKN+1に基づいて、渋滞車線における交通状態を検出する。そして、情報収集車両Bは、当該交通状態を用いて、渋滞車線における交通状態を予測した予測交通状態を取得する。
【0036】
その後、情報収集車両Bは、情報提供車両AN,AN+1の後方を走行する後続の第3車両Cに対して予測交通状態を含む情報(予測交通状態情報)を車両間通信制御部16を用いて送信する。
【0037】
第3車両Cでは、ユーザー(乗車者)に対して予測交通状態を用いた情報の提供が行われる。なお、第3車両Cは、同一車線を走行していた車両の走行履歴情報に基づいて取得される情報を回収することから、情報回収車両とも称せられる。
【0038】
このように、ナビゲーションシステムでは、車両間通信制御部16から自車の走行履歴情報を対向車線を走行する車両(対向車)に送信し、当該対向車を利用して、自車の後方を走行する後続車に予測交通状態情報を送信する。
【0039】
なお、全ての車両は情報提供車両、情報収集車両、情報回収車両になり得る可能性があるため、各車両は、情報提供機能、情報収集機能、情報回収機能の全てを有していることが好ましい。
【0040】
また、ナビゲーション装置1には、車両に搭載されるカーナビゲーション装置、またはナビゲーション機能を有する携帯機器(例えば携帯電話、PDA等)が含まれる。
【0041】
[1−2.動作]
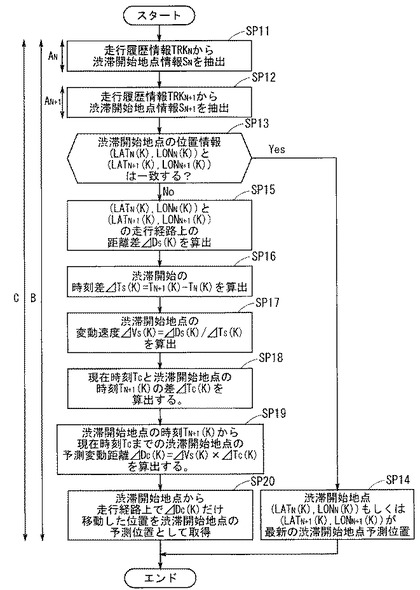
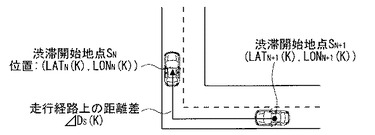
次に、予測交通状態を取得するナビゲーション装置1の動作について詳述する。ナビゲーション装置1は、予測交通状態として予測渋滞開始地点と予測渋滞終了地点とを取得するが、まずは、予測渋滞開始地点を取得する際のナビゲーション装置1の動作(予測渋滞開始地点の取得動作)について説明する。図4は、予測渋滞開始地点を取得する際のナビゲーション装置1の動作を示すフローチャートである。図5は、情報提供車両ANから取得される走行履歴情報TRKNと、情報提供車両AN+1から取得される走行履歴情報TRKN+1とを示す図である。図6は、走行経路上での距離差を例示する図である。
【0042】
予測渋滞開始地点の取得動作においては、図4に示されるように、情報提供車両ANから走行履歴情報TRKNが取得されると、ステップSP11では、渋滞地点検出部123によって、走行履歴情報TRKNを用いて渋滞開始地点が検出され、渋滞開始地点情報SNが抽出される。
【0043】
また続いて、情報提供車両AN+1から走行履歴情報TRKN+1が取得されると、ステップSP12では、渋滞地点検出部123によって、走行履歴情報TRKN+1を用いて渋滞開始地点が検出され、渋滞開始地点情報SN+1が抽出される。
【0044】
図5には、ステップSP11において、情報提供車両ANの走行履歴情報TRKNを用いて抽出された渋滞開始地点情報SNと、ステップSP12において、情報提供車両AN+1の走行履歴情報TRKN+1を用いて抽出された渋滞開始地点情報SN+1とが示されている。
【0045】
なお、渋滞開始地点の検出手法としては、例えば、或る閾値速度(「渋滞判定速度」とも称する)を設定し、走行履歴情報に含まれる移動速度(走行履歴情報TRKNではVN(K)、走行履歴情報TRKN+1ではVN+1(K))が当該閾値速度以上から閾値速度以下になった地点を、渋滞の開始地点として検出する手法を採用することができる。
【0046】
また、渋滞開始地点の他の検出手法としては、例えば、或る閾値移動距離(「渋滞判定距離」とも称する)を設定し、走行履歴情報から得られる一定期間(一定時間)の移動距離が、当該閾値移動距離以上から閾値移動距離以下になった地点を、渋滞の開始地点として検出する手法を採用してもよい。
【0047】
また或いは、渋滞が発生した際にユーザーによって入力された渋滞開始地点の情報が、走行履歴情報に含まれる場合は、走行履歴情報からユーザー入力による渋滞開始地点の情報を抽出するようにしてもよい。
【0048】
次に、ステップSP13では、渋滞状況判定部124によって、渋滞開始地点情報SN,SN+1の比較が行われ、渋滞開始地点が一致するか否かが判定される。具体的には、渋滞開始地点情報SNに含まれる位置情報(LATN(K),LONN(K))と、渋滞開始地点情報SN+1に含まれる位置情報(LATN+1(K),LONN+1(K))とが一致するか否かが判定される。なお、位置情報が完全に一致する可能性は低いため、ここでは、2つの位置情報の距離差が一定以下(例えば、5m以下)であれば、2つの位置情報は一致していると判定することが好ましい。なお、走行履歴情報TRKN+1から渋滞開始地点情報SN+1が抽出されなかった場合は、渋滞が解消されたと判断して、予測渋滞開始地点の取得動作は終了される。
【0049】
ステップSP13において、渋滞開始地点が一致すると判定された場合、動作工程は、ステップSP14に移行される。
【0050】
そして、ステップSP14では、渋滞状況予測部125によって、いずれか一方の渋滞開始地点が渋滞開始地点の予測位置(予測渋滞開始地点)として特定される。
【0051】
一方、ステップSP13において、渋滞開始地点が一致していないと判定された場合、動作工程は、ステップSP15に移行される。以降のステップSP15〜ステップSP20では、渋滞状況予測部125によって、渋滞開始地点の予測位置が算出される。
【0052】
詳細には、ステップSP15では、2つの渋滞開始地点の走行経路上での距離差(変化量)ΔDS(K)が算出される。2つの渋滞開始地点の走行経路上での距離差ΔDS(K)は、図6に示されるように、2つの渋滞開始地点PSN,PSN+1を走行経路に沿って結んだときの距離であり、地図データを参照して算出される。
【0053】
次に、ステップSP16では、渋滞開始の時刻差ΔTS(K)が算出される。渋滞開始の時刻差ΔTS(K)は、渋滞開始地点情報SN+1に含まれる時刻TN+1(K)から渋滞開始地点情報SNに含まれる時刻TN(K)を引くことによって取得することができる。すなわち、渋滞開始の時刻差ΔTS(K)は、式(1)のように表される。
【0054】
【数1】

【0055】
ステップSP17では、渋滞開始地点の変動速度ΔVS(K)が算出される。渋滞開始地点の変動速度ΔVS(K)は、2つの渋滞開始地点の走行経路上での距離差ΔDS(K)を渋滞開始の時刻差ΔTS(K)で除算することによって取得することができる。すなわち、渋滞開始地点の変動速度ΔVS(K)は、式(2)のように表される。
【0056】
【数2】
【0057】
次のステップSP18では、現在時刻Tcと、情報収集車両Bが取得した各走行履歴情報のうち最も新しい走行履歴情報から抽出された渋滞開始地点情報に含まれる時刻(ここでは、渋滞開始地点情報SN+1に含まれる時刻TN+1(K))との差ΔTc(K)が算出される。なお、情報収集車両Bが取得した各走行履歴情報のうち最も新しい走行履歴情報から抽出された渋滞開始地点情報は、「最新の渋滞開始地点情報」とも称され、当該最新の渋滞開始地点情報に含まれる時刻は、「最新の渋滞開始時刻」とも称される。
【0058】
ステップSP19では、最新の渋滞開始時刻から現在時刻Tcまでの間に変化すると予測される渋滞開始地点の予測変動距離ΔDc(K)が算出される。渋滞開始地点の予測変動距離ΔDc(K)は、渋滞開始地点の変動速度ΔVS(K)に、現在時刻Tcと最新の渋滞開始時刻との差ΔTc(K)を乗算することによって取得することができる。すなわち、渋滞開始地点の予測変動距離ΔDc(K)は、式(3)のように表される。
【0059】
【数3】
【0060】
ステップSP20では、最新の渋滞開始地点情報に含まれる位置情報(ここでは、渋滞開始地点情報SN+1に含まれる位置情報LATN+1(K),LONN+1(K))によって特定される地点から、走行経路上で予測変動距離ΔDc(K)分移動した地点を渋滞開始地点の予測位置(予測渋滞開始地点)として取得する。
【0061】
このように、情報提供車両AN,AN+1の走行履歴情報TRKN,TRKN+1から現在時刻Tcにおける渋滞開始地点の予測位置を算出することによれば、情報提供車両AN,AN+1の走行履歴情報TRKN,TRKN+1から渋滞開始地点情報を直接得る場合に比べて、精度の高い渋滞開始地点の情報をユーザーに提供することが可能になる。
【0062】
より詳細には、情報提供車両AN,AN+1の走行履歴情報TRKN,TRKN+1から渋滞開始地点情報を直接抽出する構成の場合、抽出された渋滞開始地点情報を、情報回収車両Cが取得したときには、当該渋滞開始地点情報は、古い情報となっている。これに対して、本実施形態のように、情報提供車両AN,AN+1の走行履歴情報TRKN,TRKN+1から現在時刻Tcにおける渋滞開始地点の予測位置を算出することによれば、精度の高い渋滞開始地点の情報をユーザーに提供することが可能になる。
【0063】
なお、現在時刻Tcにおける渋滞開始地点の予測位置は、走行履歴情報TRKN,TRKN+1から直接抽出される渋滞開始地点よりも時間的に後の交通状態を示していることになる。
【0064】
なお、上記では、ステップSP11〜ステップSP20の各動作工程は、情報収集車両Bにおいて実行される態様としていたが、これに限定されない。
【0065】
具体的には、図4に示されるように、ステップSP11の動作工程は、情報提供車両AN,情報収集車両Bおよび情報回収車両Cのうちいずれの車両において実行してもよく、ステップSP12の動作工程は、情報提供車両AN+1,情報収集車両Bおよび情報回収車両Cのうちいずれの車両において実行してもよい。また、ステップSP11〜ステップSP20の各動作工程は、情報収集車両Bおよび情報回収車両Cのうちどちらの車両において実行してもよい。
【0066】
例えば、情報回収車両Cにおいて、ステップSP11〜ステップSP20の各動作工程を実行する態様とすれば、渋滞開始地点の情報をユーザーに提供する直前の時刻をステップSP18で用いる現在時刻Tcとすることができるので、より精度の高い渋滞開始地点の情報をユーザーに提供することが可能になる。
【0067】
また例えば、情報収集車両Bにおいて、ステップSP11〜ステップSP20の各動作工程を実行する態様とすれば、情報回収車両Cには、算出済みの渋滞開始地点の予測位置を送信するだけでユーザーに精度の高い渋滞開始地点の情報を提供することができるので、情報回収車両Cに伝送する情報量を減少させることが可能になる。
【0068】
また例えば、情報提供車両ANにおいてステップSP11の動作工程を実行し、情報提供車両AN+1においてステップSP12の動作工程を実行することによれば、情報収集車両Bには、走行履歴情報TRKN,TRKN+1に代えて渋滞開始地点情報SN,SN+1を伝送すればよいので、伝送する情報量を減少させることが可能になる。
【0069】
また例えば、ステップSP17までの動作工程を情報収集車両Bが実行すれば、情報回収車両Cに送信する情報量を削減できる。またさらに多くの情報提供車両から走行履歴情報を集積してより新しい情報に更新したり或いは精度よく渋滞開始地点の変動速度ΔVS(K)を算出したりすることができ、3台以上の車両各々から走行履歴情報を収集しても情報回収車両Cに送信する情報量を抑えることができる。
【0070】
また例えば、ステップSP18以降の動作工程を情報回収車両Cにおいて実行することによれば、より新しい現在時刻Tcを用いて渋滞開始地点の予測位置を算出することができるので、より精度の高い渋滞開始地点の情報をユーザーに提供することが可能になる。
【0071】
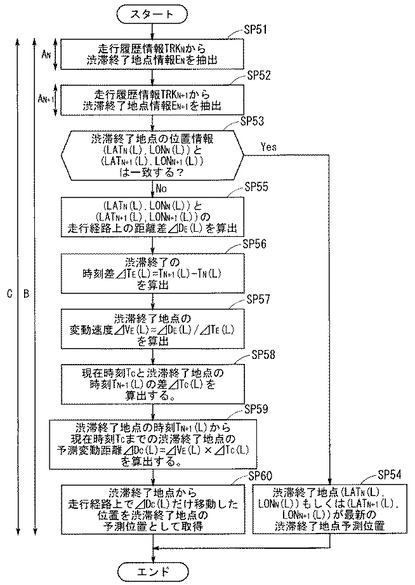
次に、予測渋滞終了地点を取得する際のナビゲーション装置1の動作(予測渋滞終了地点の取得動作)について説明する。図7は、予測渋滞終了地点を取得する際のナビゲーション装置1の動作を示すフローチャートである。
【0072】
予測渋滞終了地点の取得動作では、上述の予測渋滞開始地点の取得動作(図4)とほぼ同様の動作工程が実行されるので、下記では、予測渋滞終了地点の取得動作について簡潔に述べる。
【0073】
予測渋滞終了地点の取得動作においては、図7に示されるように、情報提供車両ANから走行履歴情報TRKNが取得されると、ステップSP51では、渋滞地点検出部123によって、走行履歴情報TRKNを用いて渋滞終了地点が特定され、渋滞終了地点情報ENが抽出される。
【0074】
また続いて、情報提供車両AN+1から走行履歴情報TRKN+1が取得されると、ステップSP52では、渋滞地点検出部123によって、走行履歴情報TRKN+1を用いて渋滞終了地点が検出され、渋滞終了地点情報EN+1が抽出される。
【0075】
図5には、ステップSP51において、情報提供車両ANの走行履歴情報TRKNを用いて抽出された渋滞終了地点情報ENと、ステップSP52において、情報提供車両AN+1の走行履歴情報TRKN+1を用いて抽出された渋滞終了地点情報EN+1とが示されている。
【0076】
なお、渋滞終了地点の検出手法としては、例えば、或る閾値速度(渋滞判定速度)を設定し、走行履歴情報に含まれる移動速度(走行履歴情報TRKNではVN(L)、走行履歴情報TRKN+1ではVN+1(L))が当該閾値速度以下から閾値速度以上になった地点を、渋滞の終了地点として検出する手法を採用することができる。
【0077】
また、渋滞終了地点の他の検出手法としては、例えば、或る閾値移動距離(渋滞判定距離)を設定し、走行履歴情報から得られる一定期間(一定時間)の移動距離が、当該閾値移動距離以下から閾値移動距離以上になった地点を、渋滞の終了地点として検出する手法を採用してもよい。
【0078】
また或いは、渋滞が発生した際にユーザーによって入力された渋滞終了地点の情報が、走行履歴情報に含まれる場合は、走行履歴情報からユーザー入力による渋滞終了地点の情報を抽出するようにしてもよい。
【0079】
次に、ステップSP53では、渋滞状況判定部124によって、渋滞終了地点情報EN,EN+1の比較が行われ、渋滞終了地点が一致するか否かが判定される。具体的には、渋滞終了地点情報ENに含まれる位置情報(LATN(L),LONN(L))と、渋滞終了地点情報EN+1に含まれる位置情報(LATN+1(L),LONN+1(L))とが一致するか否かが判定される。なお、位置情報が完全に一致する可能性は低いため、ここでは、2つの位置情報の距離差が一定以下(例えば、5m以下)であれば、2つの位置情報は一致していると判定することが好ましい。
【0080】
ステップSP53において、渋滞終了地点が一致すると判定された場合、動作工程は、ステップSP54に移行される。
【0081】
そして、ステップSP54では、渋滞状況予測部125によって、いずれか一方の渋滞終了地点が渋滞終了地点の予測位置として特定される。
【0082】
一方、ステップSP53において、渋滞終了地点が一致していないと判定された場合、動作工程は、ステップSP55に移行される。以降のステップSP55〜ステップSP60では、渋滞状況予測部125によって、渋滞終了地点の予測位置が算出される。
【0083】
詳細には、ステップSP55では、2つの渋滞終了地点の走行経路上での距離差ΔDE(L)が算出される。
【0084】
次に、ステップSP56では、渋滞終了の時刻差ΔTE(L)が算出される。渋滞終了の時刻差ΔTE(L)は、渋滞終了地点情報EN+1に含まれる時刻TN+1(L)から渋滞終了地点情報ENに含まれる時刻TN(L)を引くことによって取得することができる。
【0085】
ステップSP57では、渋滞終了地点の変動速度ΔVE(L)が算出される。渋滞終了地点の変動速度ΔVE(L)は、2つの渋滞終了地点の走行経路上での距離差ΔDE(L)を渋滞終了の時刻差ΔTE(L)で除算することによって取得することができる。
【0086】
次のステップSP58では、現在時刻Tcと、情報収集車両Bが取得した各走行履歴情報のうち最も新しい走行履歴情報から抽出された渋滞終了地点情報に含まれる時刻(ここでは、渋滞終了地点情報EN+1に含まれる時刻TN+1(L))との差ΔTc(L)が算出される。なお、情報収集車両Bが取得した各走行履歴情報のうち最も新しい走行履歴情報から抽出された渋滞終了地点情報は、「最新の渋滞終了地点情報」とも称され、当該最新の渋滞終了地点情報に含まれる時刻は、「最新の渋滞終了時刻」とも称される。
【0087】
ステップSP59では、最新の渋滞終了時刻から現在時刻Tcまでの間に変化すると予測される渋滞終了地点の予測変動距離ΔDc(L)が算出される。渋滞終了地点の予測変動距離ΔDc(L)は、渋滞終了地点の変動速度ΔVE(L)に、現在時刻Tcと最新の渋滞終了時刻との差ΔTc(L)を乗算することによって取得することができる。
【0088】
ステップSP60では、最新の渋滞終了地点情報に含まれる位置情報(ここでは、渋滞終了地点情報EN+1に含まれる位置情報LATN+1(L),LONN+1(L))によって特定される地点から、走行経路上で予測変動距離ΔDc(L)分移動した地点を渋滞終了地点の予測位置として取得する。
【0089】
このように、情報提供車両AN,AN+1の走行履歴情報TRKN,TRKN+1から現在時刻Tcにおける渋滞終了地点の予測位置を算出することによれば、情報提供車両AN,AN+1の走行履歴情報TRKN,TRKN+1から渋滞終了地点情報を直接得る場合に比べて、精度の高い渋滞終了地点の情報をユーザーに提供することが可能になる。
【0090】
より詳細には、情報提供車両AN,AN+1の走行履歴情報TRKN,TRKN+1から渋滞終了地点情報を直接抽出する構成の場合、抽出された渋滞終了地点情報を、情報回収車両Cが取得したときには、当該渋滞終了地点情報は、古い情報となっている。これに対して、本実施形態のように、情報提供車両AN,AN+1の走行履歴情報TRKN,TRKN+1から現在時刻Tcにおける渋滞終了地点の予測位置を算出することによれば、精度の高い渋滞終了地点の情報をユーザーに提供することが可能になる。
【0091】
なお、上記では、ステップSP51〜ステップSP60の各動作工程は、情報収集車両Bにおいて実行される態様としていたが、これに限定されない。
【0092】
具体的には、図7に示されるように、ステップSP51の動作工程は、情報提供車両AN,情報収集車両Bおよび情報回収車両Cのうちいずれの車両において実行してもよく、ステップSP52の動作工程は、情報提供車両AN+1,情報収集車両Bおよび情報回収車両Cのうちいずれの車両において実行してもよい。また、ステップSP51〜ステップSP60の各動作工程は、情報収集車両Bおよび情報回収車両Cのうちどちらの車両において実行してもよい。
【0093】
例えば、情報回収車両Cにおいて、ステップSP51〜ステップSP60の各動作工程を実行する態様とすれば、渋滞終了地点の情報をユーザーに提供する直前の時刻をステップSP58で用いる現在時刻Tcとすることができるので、より精度の高い渋滞終了地点の情報をユーザーに提供することが可能になる。
【0094】
また例えば、情報収集車両Bにおいて、ステップSP51〜ステップSP60の各動作工程を実行する態様とすれば、情報回収車両Cには、算出済みの渋滞終了地点の予測位置を送信するだけでユーザーに精度の高い渋滞終了地点の情報を提供することができるので、情報回収車両Cに伝送する情報量を減少させることが可能になる。
【0095】
また例えば、情報提供車両ANにおいてステップSP51の動作工程を実行し、情報提供車両AN+1においてステップSP52の動作工程を実行することによれば、情報収集車両Bには、走行履歴情報TRKN,TRKN+1に代えて渋滞終了地点情報EN,EN+1を伝送すればよいので、伝送する情報量を減少させることが可能になる。
【0096】
また例えば、ステップSP57までの動作工程を情報収集車両Bが実行すれば、情報回収車両Cに送信する情報量を削減できる。またさらに多くの情報提供車両から走行履歴情報を集積してより新しい情報に更新したり或いは精度よく渋滞終了地点の変動速度ΔVE(L)を算出したりすることができ、3台以上の車両各々から走行履歴情報を収集しても情報回収車両Cに送信する情報量を抑えることができる。
【0097】
また例えば、ステップSP58以降の動作工程を情報回収車両Cにおいて実行することによれば、より新しい現在時刻Tcを用いて渋滞終了地点の予測位置を算出することができるので、より精度の高い渋滞終了地点の情報をユーザーに提供することが可能になる。
【0098】
以上のように、ナビゲーション装置1を用いたナビゲーションシステムは、車線を走行する情報提供車両ANの走行履歴情報TRKNに基づいて第1渋滞開始地点(第1渋滞終了地点)を検出可能であり、情報提供車両ANのあとを走行する情報提供車両AN+1の走行履歴情報TRKN+1に基づいて第2渋滞開始地点(第2渋滞終了地点)を検出可能な渋滞地点検出部123と、第1渋滞開始地点と第2渋滞開始地点とを用いて渋滞開始地点の変化量を算出し、当該変化量に基づいて、第2渋滞開始地点よりも時間的に後の渋滞開始地点を予測した予測渋滞開始地点を取得する渋滞状況予測部125と、情報提供車両AN+1の後続車両において、予測渋滞開始地点(予測渋滞終了地点)を用いて情報の提供を行う情報提供手段とを備える。
【0099】
このようなナビゲーションシステムによれば、渋滞開始地点(渋滞終了地点)を予測した予測渋滞開始地点(予測渋滞終了地点)を用いて情報の提供を行うことができるので、後続車両においてユーザーに伝える情報の精度を向上させることが可能になる。
【0100】
本発明はその発明の範囲内において、本実施の形態における任意の構成要素の変形もしくは省略が可能である。
【0101】
<2.変形例>
以上、この発明の実施の形態について説明したが、この発明は、上記に説明した内容に限定されるものではない。
【0102】
例えば、上記実施形態のステップSP18では、現在時刻Tcと、情報収集車両Bが取得した各走行履歴情報のうち最も新しい走行履歴情報から抽出された渋滞開始地点情報に含まれる時刻との差ΔTc(K)を算出していたが、これに限定されない。
【0103】
具体的には、ステップSP18において、現在時刻Tcと、情報収集車両Bが取得した各走行履歴情報のうちいずれかの走行履歴情報(「基準走行履歴情報」とも称する)から抽出された渋滞開始地点情報に含まれる時刻(例えば、渋滞開始地点情報SNに含まれる時刻TN(K))との差ΔTc(K)を算出するようにしてもよい。なお、基準走行履歴情報から抽出された渋滞開始地点情報は、「基準渋滞開始地点情報」とも称され、渋滞開始地点情報に含まれる時刻は、「基準渋滞開始時刻」とも称される。
【0104】
この場合、ステップSP19では、基準渋滞開始時刻から現在時刻Tcまでの間に変化すると予測される渋滞開始地点の予測変動距離ΔDc(K)が算出されることになる。渋滞開始地点の予測変動距離ΔDc(K)は、渋滞開始地点の変動速度ΔVS(K)に、現在時刻Tcと基準渋滞開始時刻との差ΔTc(K)を乗算することによって取得することができる。
【0105】
そして、ステップSP20では、基準渋滞開始地点情報に含まれる位置情報(例えば、渋滞開始地点情報SNに含まれる位置情報LATN(K),LONN(K))によって特定される地点から、走行経路上で予測変動距離ΔDc(K)分移動した地点を渋滞開始地点の予測位置として取得することになる。
【0106】
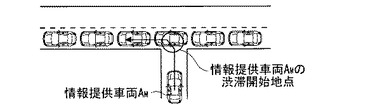
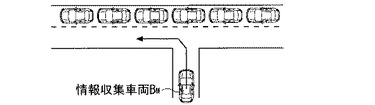
また、情報提供車両および情報収集車両は、例外的な走行経路を経た可能性がある。図8は、情報提供車両の走行経路の例外パターンを示す図であり、図9は、情報収集車両の走行経路の例外パターンを示す図である。
【0107】
具体的には、図8のように、情報提供車両AMが別の経路から渋滞車線(渋滞路)に入った車両である場合、渋滞開始位置が他の情報提供車両とは異なることになる。
【0108】
しかし、情報提供車両AMの走行履歴情報からどの経路を走行してきたか判断できるため、情報提供車両AMの渋滞開始位置情報を渋滞開始位置の予測に使用することは、回避することができる。
【0109】
なお、情報提供車両AMの走行履歴情報は、情報回収車両が必要とする走行経路以外の周辺の交通状況を把握するために利用できるため、情報提供車両AMの走行履歴情報は、残すようにしてもよい。また、別の経路から渋滞車線に入った情報提供車両AMが複数存在し、複数の情報提供車両AMが同じ経路を走行していた場合は、複数の情報提供車両AMの走行履歴情報を用いて、上述の予測渋滞開始地点の取得動作および予測渋滞終了地点の取得動作を行えば、周辺道路の最新の渋滞情報を得ることも可能になる。
【0110】
また、図9のように、渋滞車線と対向する対向車線に情報収集車両BMが別のルートから入ってきた場合、当該情報収集車両BMは、周辺道路の渋滞情報を持っている可能性がある。このため、情報収集車両BMの走行履歴情報も情報回収車両Cが受信すれば、走行経路上の周辺道路の交通状況を把握することができる。またさらに、情報収集車両BMが複数存在し、複数の情報収集車両BMが同じ経路を走行していた場合は、複数の情報提供車両AMの走行履歴情報を用いて、上述の予測渋滞開始地点の取得動作および予測渋滞終了地点の取得動作を行えば、周辺道路の最新の渋滞情報を得ることも可能になる。
【0111】
このように、情報回収車両Cは、走行予定経路上の交通状況だけでなく周辺の交通状況をも精度よく取得することが可能である。このため、情報回収車両Cは、取得した情報を元に迂回するルートをより正確に最新の情報で検索することができ、より確実に渋滞を回避することが可能になる。また、既に渋滞中の車両は、渋滞を抜けるまでの時間をより正確に得ることもできる。
【0112】
また、上記実施形態では、走行履歴情報は、時刻とその時刻における自車位置情報と移動速度とを含む情報としていたが、さらに通過した交差点の位置情報を含むようにしてもよい。これによれば、交差点の位置情報に基づいて、車両の走行経路を特定することができるので、走行履歴情報を取得する間隔を大きくすることができ、ひいては走行履歴情報の情報量を低減することができる。なお、交差点の位置情報の代わりに、交差点と交差点との間の位置情報を用いるようにしてもよい。
【0113】
また、上記実施形態に示される予測渋滞開始地点の取得動作と、予測渋滞終了地点の取得動作と、並行して実行してもよい。
【符号の説明】
【0114】
1 ナビゲーション装置、11 表示部、12 制御部、122 走行履歴情報取得部、123 渋滞地点検出部、124 渋滞状況判定部、125 渋滞状況予測部、13 制御用プログラム記憶部、14 自車位置検出部、15 自車移動速度検出部、16 車両間通信制御部、17 地図データ記憶部、18 走行履歴情報記憶部。
【技術分野】
【0001】
本発明は、交通情報の取得技術に関する。
【背景技術】
【0002】
一般的に、渋滞情報を自動車等の車両へ伝達する手段としては、VICSおよびビーコン等の手段がある。しかし、これらの情報伝達手段では、センサーが設置されていないエリアでは渋滞情報を得ることができず、またセンサーが設置されたエリアにおいて渋滞情報が得られたとしても、得られた渋滞情報は、地図上の限られた範囲の情報であるため、当該範囲外の所望範囲の情報を得るには、当該所望範囲の渋滞情報を受信可能なエリアに入らなければ、所望範囲の渋滞情報を得ることができない等、情報のリアルタイム性が悪かった。
【0003】
そこで、情報のリアルタイム性を改善するために、車両間の通信で情報を得る手段が提案されている。
【0004】
例えば、特許文献1では、前後車両との間で通信を行うことによって情報を伝達する手段が提案されている。
【0005】
また、特許文献2では、対向車線を走行する車両に、自車の情報を伝達して自車の後方を走行する後続車両に渋滞情報を伝達する手段が提案されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−148901号公報
【特許文献2】特開2007−147307号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1の技術では、進行方向の渋滞情報を得ることができるが、交通量が少なく通信範囲内に車両が走行していない場合、或いは交差点または信号待ち等によって、前後車両が離れて車両間の距離が通信距離外となった場合、後方車両には、渋滞情報が伝達されなくなる。
【0008】
これに対して、特許文献2の技術によれば、車両間が離れた場合でも、後続車両に渋滞情報を伝達することができるが、特許文献2では、渋滞中の車両から走行履歴情報を受けて渋滞車線の後続車両に当該走行履歴情報を伝えるだけであるため、後続車両においてユーザーに伝える情報の精度が低かった。
【0009】
そこで、本発明は、後続車両においてユーザーに伝える情報の精度を向上させることが可能な技術を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明に係るナビゲーションシステムは、車線を走行する第1車両の第1走行履歴情報に基づいて第1交通状態を検出可能であり、前記第1車両のあとを走行する第2車両の第2走行履歴情報に基づいて第2交通状態を検出可能な検出手段と、前記第1交通状態と前記第2交通状態とを用いて前記車線における交通状態の変化量を算出し、当該変化量に基づいて、前記第2交通状態よりも時間的に後の前記車線における交通状態を予測した予測交通状態を取得する予測手段と、前記第2車両の後続車両において、前記予測交通状態を用いて情報の提供を行う情報提供手段とを備える。
【0011】
また、本発明に係るナビゲーション装置は、対向車線を走行する対向車と通信可能な通信手段と、前記対向車線を走行する第1対向車から前記通信手段を用いて取得した第1走行履歴情報に基づいて、第1交通状態を検出するとともに、前記第1対向車のあとを走行する第2対向車から前記通信手段を用いて取得した第2走行履歴情報に基づいて、第2交通状態を検出する検出手段と、前記第1交通状態と前記第2交通状態とを用いて前記対向車線における交通状態の変化量を算出し、当該変化量に基づいて、前記第2交通状態よりも時間的に後の前記対向車線における交通状態を予測した予測交通状態を取得する予測手段とを備え、前記通信手段は、前記予測交通状態を前記第2対向車の後続車両に送信する。
【0012】
また、本発明に係るナビゲーションシステムの動作方法は、a)車線を走行する第1車両の第1走行履歴情報に基づいて第1交通状態を検出する工程と、b)前記第1車両のあとを走行する第2車両の第2走行履歴情報に基づいて第2交通状態を検出する工程と、c)前記第1交通状態と前記第2交通状態とを用いて前記車線における交通状態の変化量を算出し、当該変化量に基づいて、前記第2交通状態よりも時間的に後の前記車線における交通状態を予測した予測交通状態を取得する工程と、d)前記第2車両の後続車両において、前記予測交通状態を用いて情報の提供を行う工程とを備える。
【発明の効果】
【0013】
本発明によれば、後続車両においてユーザーに伝える情報の精度を向上させることが可能になる。
【図面の簡単な説明】
【0014】
【図1】実施形態に係るナビゲーション装置の構成を示す図である。
【図2】走行履歴情報の内容を示す図である。
【図3】本実施形態に係るナビゲーション装置を用いたナビゲーションシステムの概略図である。
【図4】渋滞開始地点情報を取得する際のナビゲーション装置の動作を示すフローチャートである。
【図5】情報提供車両から取得される走行履歴情報と、情報提供車両から取得される走行履歴情報とを示す図である。
【図6】走行経路上での距離差を例示する図である。
【図7】渋滞終了地点情報を取得する際のナビゲーション装置の動作を示すフローチャートである。
【図8】情報提供車両の走行経路の例外パターンを示す図である。
【図9】情報収集車両の走行経路の例外パターンを示す図である。
【発明を実施するための形態】
【0015】
以下、実施形態について図面を参照して説明する。
【0016】
<1.実施形態>
[1−1.構成および概要]
図1は、実施形態に係るナビゲーション装置1の構成を示す図である。図2は、走行履歴情報の内容を示す図である。
【0017】
図1に示されるように、ナビゲーション装置1は、地図、経路、交通情報等の画像を表示するための表示部11と、ナビゲーション装置1の全体制御を行う制御部12と、全体制御を行うための制御用プログラムを記憶した制御用プログラム記憶部13とを備えている。
【0018】
表示部11は、ユーザーに対して情報を提供する情報提供手段として機能する。なお、音声によりユーザーに対して情報を提供する発声手段(不図示)も当該情報提供手段に含めてもよい。
【0019】
制御用プログラム記憶部13は、例えば、ROM等で構成されている。当該制御用プログラム記憶部13は、走行情報を取得して記憶するための走行履歴情報取得プログラム131と、走行履歴情報から渋滞の開始地点と終了地点とを検出するための渋滞地点検出プログラム132と、渋滞地点情報から渋滞状況を判定する渋滞状況判定プログラム133と、渋滞状況の情報から現在時刻での渋滞開始地点と渋滞終了地点を予測する計算を行う渋滞状況予測プログラム134とを記憶している。
【0020】
これら各プログラム131〜134は、制御部12によって読み出されて、制御部12の中央処理装置(CPU)121において実行される。
【0021】
例えば、走行履歴情報取得プログラム131がCPU121で実行されると、制御部12では、走行履歴情報取得部122が機能的に実現される。走行履歴情報取得部122は、後述の自車位置検出部14および自車移動速度検出部15の検出結果を用いて走行履歴情報を取得する。図2に示されるように、走行履歴情報は、時刻とその時刻における自車位置情報と移動速度とを含む情報であり、所定間隔(例えば、2秒)ごとに取得される情報である。
【0022】
また、例えば、渋滞地点検出プログラム132がCPU121で実行されると、制御部12では、渋滞地点検出部(検出手段)123が機能的に実現される。渋滞地点検出部123は、走行履歴情報に基づいて、渋滞の開始地点と渋滞終了地点とを検出する。
【0023】
また、例えば、渋滞状況判定プログラム133がCPU121で実行されると、制御部12では、渋滞状況判定部124が機能的に実現される。渋滞状況判定部124は、渋滞の開始地点および終了地点に関する情報(渋滞地点情報)に基づいて渋滞状況の判定・計算を行う。
【0024】
また、例えば、渋滞状況予測プログラム134がCPU121で実行されると、制御部12では、渋滞状況予測部(予測手段)125が機能的に実現される。渋滞状況予測部125は、渋滞地点情報から現在時刻における渋滞開始地点と渋滞終了地点とを予測して算出する。
【0025】
また、ナビゲーション装置1は、自車位置検出部14と、自車移動速度検出部15と、車両間通信制御部16と、地図データ記憶部17と、走行履歴情報記憶部18とを備えている。
【0026】
自車位置検出部14は、GPS(Global Positioning System)装置、ヨーレートセンサーおよび加速度センサー等から構成され、自車の位置(自車位置)に関する情報(「自車位置情報」とも称する)を検出する。自車位置検出部14は、例えば、経度および緯度で表される絶対座標上での位置を自車位置情報として検出する。
【0027】
自車移動速度検出部15は、車輪の回転速度に応じた車速パルスを取得し、当該車速パルスに基づいて、自車の移動速度に関する情報(速度情報)を検出する。
【0028】
車両間通信制御部16は、他の車両のナビゲーション装置と無線通信を行う通信手段として機能する。
【0029】
地図データ記憶部17は、ハードディスクドライブ、DVD等から構成され、地図データを記憶している。
【0030】
走行履歴情報記憶部18は、ハードディスクドライブ、フラッシュメモリ、SDRAM等から構成され、走行履歴情報取得部122によって取得された走行履歴情報を記憶する。走行履歴情報記憶部18に蓄積される走行履歴情報は、車両間通信制御部16によって、対向車線を走行する車両に送信される。
【0031】
ここで、上記のような構成を有するナビゲーション装置1が、道路を走行する各車両に搭載された場合を想定する。図3は、本実施形態に係るナビゲーション装置1を用いたナビゲーションシステムの概略図である。
【0032】
図3では、ナビゲーション装置1を搭載した各車両が道路を走行している様子が示されている。具体的には、第1車両ANと第2車両AN+1と第3車両Cとが渋滞の発生している同一の車線(渋滞車線)を走行し、第4車両Bが対向車線を走行している。
【0033】
この場合、第1車両ANおよび第2車両AN+1は、対向車線を走行する第4車両Bに走行履歴情報を提供する情報提供車両としての役割を担い、第4車両Bは、すれ違う第1車両ANおよび第2車両AN+1から走行履歴情報を収集する情報収集車両としての役割を担う。すなわち、情報収集車両(第4車両)Bは、対向して走行する第1車両ANおよび第2車両AN+1から順次に第1車両ANの走行履歴情報TRKNおよび第2車両AN+1の走行履歴情報TRKN+1を取得する。
【0034】
なお、第2車両AN+1は第1車両ANの後を走行する車両群の中の1つであり、第4車両Bが走行履歴情報を第1車両ANから受信した後、次に走行履歴情報を受信する車両を意味しており、第1車両ANの直後を走行する車両に限定されない。
【0035】
情報収集車両Bは、第1車両ANの走行履歴情報TRKNに基づいて渋滞車線における交通状態(例えば渋滞開始地点、渋滞終了地点)を検出するとともに、第2車両AN+1の走行履歴情報TRKN+1に基づいて、渋滞車線における交通状態を検出する。そして、情報収集車両Bは、当該交通状態を用いて、渋滞車線における交通状態を予測した予測交通状態を取得する。
【0036】
その後、情報収集車両Bは、情報提供車両AN,AN+1の後方を走行する後続の第3車両Cに対して予測交通状態を含む情報(予測交通状態情報)を車両間通信制御部16を用いて送信する。
【0037】
第3車両Cでは、ユーザー(乗車者)に対して予測交通状態を用いた情報の提供が行われる。なお、第3車両Cは、同一車線を走行していた車両の走行履歴情報に基づいて取得される情報を回収することから、情報回収車両とも称せられる。
【0038】
このように、ナビゲーションシステムでは、車両間通信制御部16から自車の走行履歴情報を対向車線を走行する車両(対向車)に送信し、当該対向車を利用して、自車の後方を走行する後続車に予測交通状態情報を送信する。
【0039】
なお、全ての車両は情報提供車両、情報収集車両、情報回収車両になり得る可能性があるため、各車両は、情報提供機能、情報収集機能、情報回収機能の全てを有していることが好ましい。
【0040】
また、ナビゲーション装置1には、車両に搭載されるカーナビゲーション装置、またはナビゲーション機能を有する携帯機器(例えば携帯電話、PDA等)が含まれる。
【0041】
[1−2.動作]
次に、予測交通状態を取得するナビゲーション装置1の動作について詳述する。ナビゲーション装置1は、予測交通状態として予測渋滞開始地点と予測渋滞終了地点とを取得するが、まずは、予測渋滞開始地点を取得する際のナビゲーション装置1の動作(予測渋滞開始地点の取得動作)について説明する。図4は、予測渋滞開始地点を取得する際のナビゲーション装置1の動作を示すフローチャートである。図5は、情報提供車両ANから取得される走行履歴情報TRKNと、情報提供車両AN+1から取得される走行履歴情報TRKN+1とを示す図である。図6は、走行経路上での距離差を例示する図である。
【0042】
予測渋滞開始地点の取得動作においては、図4に示されるように、情報提供車両ANから走行履歴情報TRKNが取得されると、ステップSP11では、渋滞地点検出部123によって、走行履歴情報TRKNを用いて渋滞開始地点が検出され、渋滞開始地点情報SNが抽出される。
【0043】
また続いて、情報提供車両AN+1から走行履歴情報TRKN+1が取得されると、ステップSP12では、渋滞地点検出部123によって、走行履歴情報TRKN+1を用いて渋滞開始地点が検出され、渋滞開始地点情報SN+1が抽出される。
【0044】
図5には、ステップSP11において、情報提供車両ANの走行履歴情報TRKNを用いて抽出された渋滞開始地点情報SNと、ステップSP12において、情報提供車両AN+1の走行履歴情報TRKN+1を用いて抽出された渋滞開始地点情報SN+1とが示されている。
【0045】
なお、渋滞開始地点の検出手法としては、例えば、或る閾値速度(「渋滞判定速度」とも称する)を設定し、走行履歴情報に含まれる移動速度(走行履歴情報TRKNではVN(K)、走行履歴情報TRKN+1ではVN+1(K))が当該閾値速度以上から閾値速度以下になった地点を、渋滞の開始地点として検出する手法を採用することができる。
【0046】
また、渋滞開始地点の他の検出手法としては、例えば、或る閾値移動距離(「渋滞判定距離」とも称する)を設定し、走行履歴情報から得られる一定期間(一定時間)の移動距離が、当該閾値移動距離以上から閾値移動距離以下になった地点を、渋滞の開始地点として検出する手法を採用してもよい。
【0047】
また或いは、渋滞が発生した際にユーザーによって入力された渋滞開始地点の情報が、走行履歴情報に含まれる場合は、走行履歴情報からユーザー入力による渋滞開始地点の情報を抽出するようにしてもよい。
【0048】
次に、ステップSP13では、渋滞状況判定部124によって、渋滞開始地点情報SN,SN+1の比較が行われ、渋滞開始地点が一致するか否かが判定される。具体的には、渋滞開始地点情報SNに含まれる位置情報(LATN(K),LONN(K))と、渋滞開始地点情報SN+1に含まれる位置情報(LATN+1(K),LONN+1(K))とが一致するか否かが判定される。なお、位置情報が完全に一致する可能性は低いため、ここでは、2つの位置情報の距離差が一定以下(例えば、5m以下)であれば、2つの位置情報は一致していると判定することが好ましい。なお、走行履歴情報TRKN+1から渋滞開始地点情報SN+1が抽出されなかった場合は、渋滞が解消されたと判断して、予測渋滞開始地点の取得動作は終了される。
【0049】
ステップSP13において、渋滞開始地点が一致すると判定された場合、動作工程は、ステップSP14に移行される。
【0050】
そして、ステップSP14では、渋滞状況予測部125によって、いずれか一方の渋滞開始地点が渋滞開始地点の予測位置(予測渋滞開始地点)として特定される。
【0051】
一方、ステップSP13において、渋滞開始地点が一致していないと判定された場合、動作工程は、ステップSP15に移行される。以降のステップSP15〜ステップSP20では、渋滞状況予測部125によって、渋滞開始地点の予測位置が算出される。
【0052】
詳細には、ステップSP15では、2つの渋滞開始地点の走行経路上での距離差(変化量)ΔDS(K)が算出される。2つの渋滞開始地点の走行経路上での距離差ΔDS(K)は、図6に示されるように、2つの渋滞開始地点PSN,PSN+1を走行経路に沿って結んだときの距離であり、地図データを参照して算出される。
【0053】
次に、ステップSP16では、渋滞開始の時刻差ΔTS(K)が算出される。渋滞開始の時刻差ΔTS(K)は、渋滞開始地点情報SN+1に含まれる時刻TN+1(K)から渋滞開始地点情報SNに含まれる時刻TN(K)を引くことによって取得することができる。すなわち、渋滞開始の時刻差ΔTS(K)は、式(1)のように表される。
【0054】
【数1】
【0055】
ステップSP17では、渋滞開始地点の変動速度ΔVS(K)が算出される。渋滞開始地点の変動速度ΔVS(K)は、2つの渋滞開始地点の走行経路上での距離差ΔDS(K)を渋滞開始の時刻差ΔTS(K)で除算することによって取得することができる。すなわち、渋滞開始地点の変動速度ΔVS(K)は、式(2)のように表される。
【0056】
【数2】
【0057】
次のステップSP18では、現在時刻Tcと、情報収集車両Bが取得した各走行履歴情報のうち最も新しい走行履歴情報から抽出された渋滞開始地点情報に含まれる時刻(ここでは、渋滞開始地点情報SN+1に含まれる時刻TN+1(K))との差ΔTc(K)が算出される。なお、情報収集車両Bが取得した各走行履歴情報のうち最も新しい走行履歴情報から抽出された渋滞開始地点情報は、「最新の渋滞開始地点情報」とも称され、当該最新の渋滞開始地点情報に含まれる時刻は、「最新の渋滞開始時刻」とも称される。
【0058】
ステップSP19では、最新の渋滞開始時刻から現在時刻Tcまでの間に変化すると予測される渋滞開始地点の予測変動距離ΔDc(K)が算出される。渋滞開始地点の予測変動距離ΔDc(K)は、渋滞開始地点の変動速度ΔVS(K)に、現在時刻Tcと最新の渋滞開始時刻との差ΔTc(K)を乗算することによって取得することができる。すなわち、渋滞開始地点の予測変動距離ΔDc(K)は、式(3)のように表される。
【0059】
【数3】
【0060】
ステップSP20では、最新の渋滞開始地点情報に含まれる位置情報(ここでは、渋滞開始地点情報SN+1に含まれる位置情報LATN+1(K),LONN+1(K))によって特定される地点から、走行経路上で予測変動距離ΔDc(K)分移動した地点を渋滞開始地点の予測位置(予測渋滞開始地点)として取得する。
【0061】
このように、情報提供車両AN,AN+1の走行履歴情報TRKN,TRKN+1から現在時刻Tcにおける渋滞開始地点の予測位置を算出することによれば、情報提供車両AN,AN+1の走行履歴情報TRKN,TRKN+1から渋滞開始地点情報を直接得る場合に比べて、精度の高い渋滞開始地点の情報をユーザーに提供することが可能になる。
【0062】
より詳細には、情報提供車両AN,AN+1の走行履歴情報TRKN,TRKN+1から渋滞開始地点情報を直接抽出する構成の場合、抽出された渋滞開始地点情報を、情報回収車両Cが取得したときには、当該渋滞開始地点情報は、古い情報となっている。これに対して、本実施形態のように、情報提供車両AN,AN+1の走行履歴情報TRKN,TRKN+1から現在時刻Tcにおける渋滞開始地点の予測位置を算出することによれば、精度の高い渋滞開始地点の情報をユーザーに提供することが可能になる。
【0063】
なお、現在時刻Tcにおける渋滞開始地点の予測位置は、走行履歴情報TRKN,TRKN+1から直接抽出される渋滞開始地点よりも時間的に後の交通状態を示していることになる。
【0064】
なお、上記では、ステップSP11〜ステップSP20の各動作工程は、情報収集車両Bにおいて実行される態様としていたが、これに限定されない。
【0065】
具体的には、図4に示されるように、ステップSP11の動作工程は、情報提供車両AN,情報収集車両Bおよび情報回収車両Cのうちいずれの車両において実行してもよく、ステップSP12の動作工程は、情報提供車両AN+1,情報収集車両Bおよび情報回収車両Cのうちいずれの車両において実行してもよい。また、ステップSP11〜ステップSP20の各動作工程は、情報収集車両Bおよび情報回収車両Cのうちどちらの車両において実行してもよい。
【0066】
例えば、情報回収車両Cにおいて、ステップSP11〜ステップSP20の各動作工程を実行する態様とすれば、渋滞開始地点の情報をユーザーに提供する直前の時刻をステップSP18で用いる現在時刻Tcとすることができるので、より精度の高い渋滞開始地点の情報をユーザーに提供することが可能になる。
【0067】
また例えば、情報収集車両Bにおいて、ステップSP11〜ステップSP20の各動作工程を実行する態様とすれば、情報回収車両Cには、算出済みの渋滞開始地点の予測位置を送信するだけでユーザーに精度の高い渋滞開始地点の情報を提供することができるので、情報回収車両Cに伝送する情報量を減少させることが可能になる。
【0068】
また例えば、情報提供車両ANにおいてステップSP11の動作工程を実行し、情報提供車両AN+1においてステップSP12の動作工程を実行することによれば、情報収集車両Bには、走行履歴情報TRKN,TRKN+1に代えて渋滞開始地点情報SN,SN+1を伝送すればよいので、伝送する情報量を減少させることが可能になる。
【0069】
また例えば、ステップSP17までの動作工程を情報収集車両Bが実行すれば、情報回収車両Cに送信する情報量を削減できる。またさらに多くの情報提供車両から走行履歴情報を集積してより新しい情報に更新したり或いは精度よく渋滞開始地点の変動速度ΔVS(K)を算出したりすることができ、3台以上の車両各々から走行履歴情報を収集しても情報回収車両Cに送信する情報量を抑えることができる。
【0070】
また例えば、ステップSP18以降の動作工程を情報回収車両Cにおいて実行することによれば、より新しい現在時刻Tcを用いて渋滞開始地点の予測位置を算出することができるので、より精度の高い渋滞開始地点の情報をユーザーに提供することが可能になる。
【0071】
次に、予測渋滞終了地点を取得する際のナビゲーション装置1の動作(予測渋滞終了地点の取得動作)について説明する。図7は、予測渋滞終了地点を取得する際のナビゲーション装置1の動作を示すフローチャートである。
【0072】
予測渋滞終了地点の取得動作では、上述の予測渋滞開始地点の取得動作(図4)とほぼ同様の動作工程が実行されるので、下記では、予測渋滞終了地点の取得動作について簡潔に述べる。
【0073】
予測渋滞終了地点の取得動作においては、図7に示されるように、情報提供車両ANから走行履歴情報TRKNが取得されると、ステップSP51では、渋滞地点検出部123によって、走行履歴情報TRKNを用いて渋滞終了地点が特定され、渋滞終了地点情報ENが抽出される。
【0074】
また続いて、情報提供車両AN+1から走行履歴情報TRKN+1が取得されると、ステップSP52では、渋滞地点検出部123によって、走行履歴情報TRKN+1を用いて渋滞終了地点が検出され、渋滞終了地点情報EN+1が抽出される。
【0075】
図5には、ステップSP51において、情報提供車両ANの走行履歴情報TRKNを用いて抽出された渋滞終了地点情報ENと、ステップSP52において、情報提供車両AN+1の走行履歴情報TRKN+1を用いて抽出された渋滞終了地点情報EN+1とが示されている。
【0076】
なお、渋滞終了地点の検出手法としては、例えば、或る閾値速度(渋滞判定速度)を設定し、走行履歴情報に含まれる移動速度(走行履歴情報TRKNではVN(L)、走行履歴情報TRKN+1ではVN+1(L))が当該閾値速度以下から閾値速度以上になった地点を、渋滞の終了地点として検出する手法を採用することができる。
【0077】
また、渋滞終了地点の他の検出手法としては、例えば、或る閾値移動距離(渋滞判定距離)を設定し、走行履歴情報から得られる一定期間(一定時間)の移動距離が、当該閾値移動距離以下から閾値移動距離以上になった地点を、渋滞の終了地点として検出する手法を採用してもよい。
【0078】
また或いは、渋滞が発生した際にユーザーによって入力された渋滞終了地点の情報が、走行履歴情報に含まれる場合は、走行履歴情報からユーザー入力による渋滞終了地点の情報を抽出するようにしてもよい。
【0079】
次に、ステップSP53では、渋滞状況判定部124によって、渋滞終了地点情報EN,EN+1の比較が行われ、渋滞終了地点が一致するか否かが判定される。具体的には、渋滞終了地点情報ENに含まれる位置情報(LATN(L),LONN(L))と、渋滞終了地点情報EN+1に含まれる位置情報(LATN+1(L),LONN+1(L))とが一致するか否かが判定される。なお、位置情報が完全に一致する可能性は低いため、ここでは、2つの位置情報の距離差が一定以下(例えば、5m以下)であれば、2つの位置情報は一致していると判定することが好ましい。
【0080】
ステップSP53において、渋滞終了地点が一致すると判定された場合、動作工程は、ステップSP54に移行される。
【0081】
そして、ステップSP54では、渋滞状況予測部125によって、いずれか一方の渋滞終了地点が渋滞終了地点の予測位置として特定される。
【0082】
一方、ステップSP53において、渋滞終了地点が一致していないと判定された場合、動作工程は、ステップSP55に移行される。以降のステップSP55〜ステップSP60では、渋滞状況予測部125によって、渋滞終了地点の予測位置が算出される。
【0083】
詳細には、ステップSP55では、2つの渋滞終了地点の走行経路上での距離差ΔDE(L)が算出される。
【0084】
次に、ステップSP56では、渋滞終了の時刻差ΔTE(L)が算出される。渋滞終了の時刻差ΔTE(L)は、渋滞終了地点情報EN+1に含まれる時刻TN+1(L)から渋滞終了地点情報ENに含まれる時刻TN(L)を引くことによって取得することができる。
【0085】
ステップSP57では、渋滞終了地点の変動速度ΔVE(L)が算出される。渋滞終了地点の変動速度ΔVE(L)は、2つの渋滞終了地点の走行経路上での距離差ΔDE(L)を渋滞終了の時刻差ΔTE(L)で除算することによって取得することができる。
【0086】
次のステップSP58では、現在時刻Tcと、情報収集車両Bが取得した各走行履歴情報のうち最も新しい走行履歴情報から抽出された渋滞終了地点情報に含まれる時刻(ここでは、渋滞終了地点情報EN+1に含まれる時刻TN+1(L))との差ΔTc(L)が算出される。なお、情報収集車両Bが取得した各走行履歴情報のうち最も新しい走行履歴情報から抽出された渋滞終了地点情報は、「最新の渋滞終了地点情報」とも称され、当該最新の渋滞終了地点情報に含まれる時刻は、「最新の渋滞終了時刻」とも称される。
【0087】
ステップSP59では、最新の渋滞終了時刻から現在時刻Tcまでの間に変化すると予測される渋滞終了地点の予測変動距離ΔDc(L)が算出される。渋滞終了地点の予測変動距離ΔDc(L)は、渋滞終了地点の変動速度ΔVE(L)に、現在時刻Tcと最新の渋滞終了時刻との差ΔTc(L)を乗算することによって取得することができる。
【0088】
ステップSP60では、最新の渋滞終了地点情報に含まれる位置情報(ここでは、渋滞終了地点情報EN+1に含まれる位置情報LATN+1(L),LONN+1(L))によって特定される地点から、走行経路上で予測変動距離ΔDc(L)分移動した地点を渋滞終了地点の予測位置として取得する。
【0089】
このように、情報提供車両AN,AN+1の走行履歴情報TRKN,TRKN+1から現在時刻Tcにおける渋滞終了地点の予測位置を算出することによれば、情報提供車両AN,AN+1の走行履歴情報TRKN,TRKN+1から渋滞終了地点情報を直接得る場合に比べて、精度の高い渋滞終了地点の情報をユーザーに提供することが可能になる。
【0090】
より詳細には、情報提供車両AN,AN+1の走行履歴情報TRKN,TRKN+1から渋滞終了地点情報を直接抽出する構成の場合、抽出された渋滞終了地点情報を、情報回収車両Cが取得したときには、当該渋滞終了地点情報は、古い情報となっている。これに対して、本実施形態のように、情報提供車両AN,AN+1の走行履歴情報TRKN,TRKN+1から現在時刻Tcにおける渋滞終了地点の予測位置を算出することによれば、精度の高い渋滞終了地点の情報をユーザーに提供することが可能になる。
【0091】
なお、上記では、ステップSP51〜ステップSP60の各動作工程は、情報収集車両Bにおいて実行される態様としていたが、これに限定されない。
【0092】
具体的には、図7に示されるように、ステップSP51の動作工程は、情報提供車両AN,情報収集車両Bおよび情報回収車両Cのうちいずれの車両において実行してもよく、ステップSP52の動作工程は、情報提供車両AN+1,情報収集車両Bおよび情報回収車両Cのうちいずれの車両において実行してもよい。また、ステップSP51〜ステップSP60の各動作工程は、情報収集車両Bおよび情報回収車両Cのうちどちらの車両において実行してもよい。
【0093】
例えば、情報回収車両Cにおいて、ステップSP51〜ステップSP60の各動作工程を実行する態様とすれば、渋滞終了地点の情報をユーザーに提供する直前の時刻をステップSP58で用いる現在時刻Tcとすることができるので、より精度の高い渋滞終了地点の情報をユーザーに提供することが可能になる。
【0094】
また例えば、情報収集車両Bにおいて、ステップSP51〜ステップSP60の各動作工程を実行する態様とすれば、情報回収車両Cには、算出済みの渋滞終了地点の予測位置を送信するだけでユーザーに精度の高い渋滞終了地点の情報を提供することができるので、情報回収車両Cに伝送する情報量を減少させることが可能になる。
【0095】
また例えば、情報提供車両ANにおいてステップSP51の動作工程を実行し、情報提供車両AN+1においてステップSP52の動作工程を実行することによれば、情報収集車両Bには、走行履歴情報TRKN,TRKN+1に代えて渋滞終了地点情報EN,EN+1を伝送すればよいので、伝送する情報量を減少させることが可能になる。
【0096】
また例えば、ステップSP57までの動作工程を情報収集車両Bが実行すれば、情報回収車両Cに送信する情報量を削減できる。またさらに多くの情報提供車両から走行履歴情報を集積してより新しい情報に更新したり或いは精度よく渋滞終了地点の変動速度ΔVE(L)を算出したりすることができ、3台以上の車両各々から走行履歴情報を収集しても情報回収車両Cに送信する情報量を抑えることができる。
【0097】
また例えば、ステップSP58以降の動作工程を情報回収車両Cにおいて実行することによれば、より新しい現在時刻Tcを用いて渋滞終了地点の予測位置を算出することができるので、より精度の高い渋滞終了地点の情報をユーザーに提供することが可能になる。
【0098】
以上のように、ナビゲーション装置1を用いたナビゲーションシステムは、車線を走行する情報提供車両ANの走行履歴情報TRKNに基づいて第1渋滞開始地点(第1渋滞終了地点)を検出可能であり、情報提供車両ANのあとを走行する情報提供車両AN+1の走行履歴情報TRKN+1に基づいて第2渋滞開始地点(第2渋滞終了地点)を検出可能な渋滞地点検出部123と、第1渋滞開始地点と第2渋滞開始地点とを用いて渋滞開始地点の変化量を算出し、当該変化量に基づいて、第2渋滞開始地点よりも時間的に後の渋滞開始地点を予測した予測渋滞開始地点を取得する渋滞状況予測部125と、情報提供車両AN+1の後続車両において、予測渋滞開始地点(予測渋滞終了地点)を用いて情報の提供を行う情報提供手段とを備える。
【0099】
このようなナビゲーションシステムによれば、渋滞開始地点(渋滞終了地点)を予測した予測渋滞開始地点(予測渋滞終了地点)を用いて情報の提供を行うことができるので、後続車両においてユーザーに伝える情報の精度を向上させることが可能になる。
【0100】
本発明はその発明の範囲内において、本実施の形態における任意の構成要素の変形もしくは省略が可能である。
【0101】
<2.変形例>
以上、この発明の実施の形態について説明したが、この発明は、上記に説明した内容に限定されるものではない。
【0102】
例えば、上記実施形態のステップSP18では、現在時刻Tcと、情報収集車両Bが取得した各走行履歴情報のうち最も新しい走行履歴情報から抽出された渋滞開始地点情報に含まれる時刻との差ΔTc(K)を算出していたが、これに限定されない。
【0103】
具体的には、ステップSP18において、現在時刻Tcと、情報収集車両Bが取得した各走行履歴情報のうちいずれかの走行履歴情報(「基準走行履歴情報」とも称する)から抽出された渋滞開始地点情報に含まれる時刻(例えば、渋滞開始地点情報SNに含まれる時刻TN(K))との差ΔTc(K)を算出するようにしてもよい。なお、基準走行履歴情報から抽出された渋滞開始地点情報は、「基準渋滞開始地点情報」とも称され、渋滞開始地点情報に含まれる時刻は、「基準渋滞開始時刻」とも称される。
【0104】
この場合、ステップSP19では、基準渋滞開始時刻から現在時刻Tcまでの間に変化すると予測される渋滞開始地点の予測変動距離ΔDc(K)が算出されることになる。渋滞開始地点の予測変動距離ΔDc(K)は、渋滞開始地点の変動速度ΔVS(K)に、現在時刻Tcと基準渋滞開始時刻との差ΔTc(K)を乗算することによって取得することができる。
【0105】
そして、ステップSP20では、基準渋滞開始地点情報に含まれる位置情報(例えば、渋滞開始地点情報SNに含まれる位置情報LATN(K),LONN(K))によって特定される地点から、走行経路上で予測変動距離ΔDc(K)分移動した地点を渋滞開始地点の予測位置として取得することになる。
【0106】
また、情報提供車両および情報収集車両は、例外的な走行経路を経た可能性がある。図8は、情報提供車両の走行経路の例外パターンを示す図であり、図9は、情報収集車両の走行経路の例外パターンを示す図である。
【0107】
具体的には、図8のように、情報提供車両AMが別の経路から渋滞車線(渋滞路)に入った車両である場合、渋滞開始位置が他の情報提供車両とは異なることになる。
【0108】
しかし、情報提供車両AMの走行履歴情報からどの経路を走行してきたか判断できるため、情報提供車両AMの渋滞開始位置情報を渋滞開始位置の予測に使用することは、回避することができる。
【0109】
なお、情報提供車両AMの走行履歴情報は、情報回収車両が必要とする走行経路以外の周辺の交通状況を把握するために利用できるため、情報提供車両AMの走行履歴情報は、残すようにしてもよい。また、別の経路から渋滞車線に入った情報提供車両AMが複数存在し、複数の情報提供車両AMが同じ経路を走行していた場合は、複数の情報提供車両AMの走行履歴情報を用いて、上述の予測渋滞開始地点の取得動作および予測渋滞終了地点の取得動作を行えば、周辺道路の最新の渋滞情報を得ることも可能になる。
【0110】
また、図9のように、渋滞車線と対向する対向車線に情報収集車両BMが別のルートから入ってきた場合、当該情報収集車両BMは、周辺道路の渋滞情報を持っている可能性がある。このため、情報収集車両BMの走行履歴情報も情報回収車両Cが受信すれば、走行経路上の周辺道路の交通状況を把握することができる。またさらに、情報収集車両BMが複数存在し、複数の情報収集車両BMが同じ経路を走行していた場合は、複数の情報提供車両AMの走行履歴情報を用いて、上述の予測渋滞開始地点の取得動作および予測渋滞終了地点の取得動作を行えば、周辺道路の最新の渋滞情報を得ることも可能になる。
【0111】
このように、情報回収車両Cは、走行予定経路上の交通状況だけでなく周辺の交通状況をも精度よく取得することが可能である。このため、情報回収車両Cは、取得した情報を元に迂回するルートをより正確に最新の情報で検索することができ、より確実に渋滞を回避することが可能になる。また、既に渋滞中の車両は、渋滞を抜けるまでの時間をより正確に得ることもできる。
【0112】
また、上記実施形態では、走行履歴情報は、時刻とその時刻における自車位置情報と移動速度とを含む情報としていたが、さらに通過した交差点の位置情報を含むようにしてもよい。これによれば、交差点の位置情報に基づいて、車両の走行経路を特定することができるので、走行履歴情報を取得する間隔を大きくすることができ、ひいては走行履歴情報の情報量を低減することができる。なお、交差点の位置情報の代わりに、交差点と交差点との間の位置情報を用いるようにしてもよい。
【0113】
また、上記実施形態に示される予測渋滞開始地点の取得動作と、予測渋滞終了地点の取得動作と、並行して実行してもよい。
【符号の説明】
【0114】
1 ナビゲーション装置、11 表示部、12 制御部、122 走行履歴情報取得部、123 渋滞地点検出部、124 渋滞状況判定部、125 渋滞状況予測部、13 制御用プログラム記憶部、14 自車位置検出部、15 自車移動速度検出部、16 車両間通信制御部、17 地図データ記憶部、18 走行履歴情報記憶部。
【特許請求の範囲】
【請求項1】
車線を走行する第1車両の第1走行履歴情報に基づいて第1交通状態を検出可能であり、前記第1車両のあとを走行する第2車両の第2走行履歴情報に基づいて第2交通状態を検出可能な検出手段と、
前記第1交通状態と前記第2交通状態とを用いて前記車線における交通状態の変化量を算出し、当該変化量に基づいて、前記第2交通状態よりも時間的に後の前記車線における交通状態を予測した予測交通状態を取得する予測手段と、
前記第2車両の後続車両において、前記予測交通状態を用いて情報の提供を行う情報提供手段と、
を備えるナビゲーションシステム。
【請求項2】
前記車線に対する対向車線を走行する対向車両は、前記第1車両、前記第2車両および前記後続車両それぞれと通信可能な通信手段を有し、
前記対向車両は、前記通信手段を用いて前記第1車両から前記第1走行履歴情報を取得するとともに、前記通信手段を用いて前記第2車両から前記第2走行履歴情報を取得し、
前記対向車両は、前記検出手段および前記予測手段をさらに有し、
前記対向車両は、前記通信手段を用いて前記予測交通状態を前記後続車両に送信する請求項1に記載のナビゲーションシステム。
【請求項3】
前記車線に対する対向車線を走行する対向車両は、前記第1車両、前記第2車両および前記後続車両それぞれと通信可能な通信手段を有し、
前記対向車両は、前記通信手段を用いて前記第1車両から前記第1走行履歴情報を取得するとともに、前記通信手段を用いて前記第2車両から前記第2走行履歴情報を取得し、
前記対向車両は、前記通信手段を用いて前記第1走行履歴情報および前記第2走行履歴情報を前記後続車両に送信し、
前記後続車両は、前記検出手段および前記予測手段を有する請求項1に記載のナビゲーションシステム。
【請求項4】
前記車線に対する対向車線を走行する対向車両は、前記第1車両、前記第2車両および前記後続車両それぞれと通信可能な通信手段を有し、
前記対向車両は、前記通信手段を用いて前記第1車両から前記第1走行履歴情報を取得するとともに、前記通信手段を用いて前記第2車両から前記第2走行履歴情報を取得し、
前記対向車両は、前記検出手段をさらに有し、
前記対向車両は、前記通信手段を用いて前記第1交通状態および前記第2交通状態を前記後続車両に送信し、
前記後続車両は、前記予測手段を有する請求項1に記載のナビゲーションシステム。
【請求項5】
前記車線に対する対向車線を走行する対向車両は、前記第1車両、前記第2車両および前記後続車両それぞれと通信可能な通信手段を有し、
前記第1車両および前記第2車両は、前記検出手段を有し、
前記第1車両は、前記検出手段によって第1走行履歴情報に基づいて第1交通状態を検出し、
前記第2車両は、前記検出手段によって第2走行履歴情報に基づいて第2交通状態を検出し、
前記対向車両は、前記通信手段を用いて前記第1車両から前記第1交通状態を取得するとともに、前記通信手段を用いて前記第2車両から前記第2交通状態を取得し、
前記対向車両は、前記予測手段をさらに有し、
前記対向車両は、前記通信手段を用いて前記予測交通状態を前記後続車両に送信する請求項1に記載のナビゲーションシステム。
【請求項6】
前記車線に対する対向車線を走行する対向車両は、前記第1車両、前記第2車両および前記後続車両それぞれと通信可能な通信手段を有し、
前記第1車両および前記第2車両は、前記検出手段を有し、
前記第1車両は、前記検出手段によって第1走行履歴情報に基づいて第1交通状態を検出し、
前記第2車両は、前記検出手段によって第2走行履歴情報に基づいて第2交通状態を検出し、
前記対向車両は、前記通信手段を用いて前記第1車両から前記第1交通状態を取得するとともに、前記通信手段を用いて前記第2車両から前記第2交通状態を取得し、
前記対向車両は、前記通信手段を用いて前記第1交通状態および前記第2交通状態を前記後続車両に送信し、
前記後続車両は、前記予測手段を有する請求項1に記載のナビゲーションシステム。
【請求項7】
前記検出手段は、前記第1走行履歴情報に基づいて前記車線において発生した渋滞の開始地点を前記第1交通状態として検出可能であるとともに、前記第2走行履歴情報に基づいて前記渋滞の開始地点を前記第2交通状態として検出可能であり、
前記予測手段は、前記第1走行履歴情報に基づいて検出された渋滞の開始地点と、前記第2走行履歴情報に基づいて検出された渋滞の開始地点とを比較して、渋滞の開始地点の走行経路上での変化量を算出し、当該変化量に基づいて渋滞の開始地点の予測位置を前記予測交通状態として取得する請求項1から請求項6のいずれかに記載のナビゲーションシステム。
【請求項8】
前記検出手段は、前記第1走行履歴情報に基づいて前記車線において発生した渋滞の終了地点を前記第1交通状態として検出可能であるとともに、前記第2走行履歴情報に基づいて前記渋滞の終了地点を前記第2交通状態として検出可能であり、
前記予測手段は、前記第1走行履歴情報に基づいて検出された渋滞の終了地点と、前記第2走行履歴情報に基づいて検出された渋滞の終了地点とを比較して、渋滞の終了地点の走行経路上での変化量を算出し、当該変化量に基づいて渋滞の終了地点の予測位置を前記予測交通状態として取得する請求項1から請求項6のいずれかに記載のナビゲーションシステム。
【請求項9】
対向車線を走行する対向車と通信可能な通信手段と、
前記対向車線を走行する第1対向車から前記通信手段を用いて取得した第1走行履歴情報に基づいて、第1交通状態を検出するとともに、前記第1対向車のあとを走行する第2対向車から前記通信手段を用いて取得した第2走行履歴情報に基づいて、第2交通状態を検出する検出手段と、
前記第1交通状態と前記第2交通状態とを用いて前記対向車線における交通状態の変化量を算出し、当該変化量に基づいて、前記第2交通状態よりも時間的に後の前記対向車線における交通状態を予測した予測交通状態を取得する予測手段と、
を備え、
前記通信手段は、前記予測交通状態を前記第2対向車の後続車両に送信するナビゲーション装置。
【請求項10】
前記検出手段は、前記第1走行履歴情報に基づいて前記対向車線において発生した渋滞の開始地点を前記第1交通状態として検出するとともに、前記第2走行履歴情報に基づいて前記渋滞の開始地点を前記第2交通状態として検出し、
前記予測手段は、前記第1走行履歴情報に基づいて検出された渋滞の開始地点と、前記第2走行履歴情報に基づいて検出された渋滞の開始地点とを比較して、渋滞の開始地点の走行経路上での変化量を算出し、当該変化量に基づいて渋滞の開始地点の予測位置を前記予測交通状態として取得する請求項9に記載のナビゲーション装置。
【請求項11】
前記検出手段は、前記第1走行履歴情報に基づいて前記対向車線において発生した渋滞の終了地点を前記第1交通状態として検出するとともに、前記第2走行履歴情報に基づいて前記渋滞の終了地点を前記第2交通状態として検出し、
前記予測手段は、前記第1走行履歴情報に基づいて検出された渋滞の終了地点と、前記第2走行履歴情報に基づいて検出された渋滞の終了地点とを比較して、渋滞の終了地点の走行経路上での変化量を算出し、当該変化量に基づいて渋滞の終了地点の予測位置を前記予測交通状態として取得する請求項9に記載のナビゲーション装置。
【請求項12】
a)車線を走行する第1車両の第1走行履歴情報に基づいて第1交通状態を検出する工程と、
b)前記第1車両のあとを走行する第2車両の第2走行履歴情報に基づいて第2交通状態を検出する工程と、
c)前記第1交通状態と前記第2交通状態とを用いて前記車線における交通状態の変化量を算出し、当該変化量に基づいて、前記第2交通状態よりも時間的に後の前記車線における交通状態を予測した予測交通状態を取得する工程と、
d)前記第2車両の後続車両において、前記予測交通状態を用いて情報の提供を行う工程と、
を備えるナビゲーションシステムの動作方法。
【請求項1】
車線を走行する第1車両の第1走行履歴情報に基づいて第1交通状態を検出可能であり、前記第1車両のあとを走行する第2車両の第2走行履歴情報に基づいて第2交通状態を検出可能な検出手段と、
前記第1交通状態と前記第2交通状態とを用いて前記車線における交通状態の変化量を算出し、当該変化量に基づいて、前記第2交通状態よりも時間的に後の前記車線における交通状態を予測した予測交通状態を取得する予測手段と、
前記第2車両の後続車両において、前記予測交通状態を用いて情報の提供を行う情報提供手段と、
を備えるナビゲーションシステム。
【請求項2】
前記車線に対する対向車線を走行する対向車両は、前記第1車両、前記第2車両および前記後続車両それぞれと通信可能な通信手段を有し、
前記対向車両は、前記通信手段を用いて前記第1車両から前記第1走行履歴情報を取得するとともに、前記通信手段を用いて前記第2車両から前記第2走行履歴情報を取得し、
前記対向車両は、前記検出手段および前記予測手段をさらに有し、
前記対向車両は、前記通信手段を用いて前記予測交通状態を前記後続車両に送信する請求項1に記載のナビゲーションシステム。
【請求項3】
前記車線に対する対向車線を走行する対向車両は、前記第1車両、前記第2車両および前記後続車両それぞれと通信可能な通信手段を有し、
前記対向車両は、前記通信手段を用いて前記第1車両から前記第1走行履歴情報を取得するとともに、前記通信手段を用いて前記第2車両から前記第2走行履歴情報を取得し、
前記対向車両は、前記通信手段を用いて前記第1走行履歴情報および前記第2走行履歴情報を前記後続車両に送信し、
前記後続車両は、前記検出手段および前記予測手段を有する請求項1に記載のナビゲーションシステム。
【請求項4】
前記車線に対する対向車線を走行する対向車両は、前記第1車両、前記第2車両および前記後続車両それぞれと通信可能な通信手段を有し、
前記対向車両は、前記通信手段を用いて前記第1車両から前記第1走行履歴情報を取得するとともに、前記通信手段を用いて前記第2車両から前記第2走行履歴情報を取得し、
前記対向車両は、前記検出手段をさらに有し、
前記対向車両は、前記通信手段を用いて前記第1交通状態および前記第2交通状態を前記後続車両に送信し、
前記後続車両は、前記予測手段を有する請求項1に記載のナビゲーションシステム。
【請求項5】
前記車線に対する対向車線を走行する対向車両は、前記第1車両、前記第2車両および前記後続車両それぞれと通信可能な通信手段を有し、
前記第1車両および前記第2車両は、前記検出手段を有し、
前記第1車両は、前記検出手段によって第1走行履歴情報に基づいて第1交通状態を検出し、
前記第2車両は、前記検出手段によって第2走行履歴情報に基づいて第2交通状態を検出し、
前記対向車両は、前記通信手段を用いて前記第1車両から前記第1交通状態を取得するとともに、前記通信手段を用いて前記第2車両から前記第2交通状態を取得し、
前記対向車両は、前記予測手段をさらに有し、
前記対向車両は、前記通信手段を用いて前記予測交通状態を前記後続車両に送信する請求項1に記載のナビゲーションシステム。
【請求項6】
前記車線に対する対向車線を走行する対向車両は、前記第1車両、前記第2車両および前記後続車両それぞれと通信可能な通信手段を有し、
前記第1車両および前記第2車両は、前記検出手段を有し、
前記第1車両は、前記検出手段によって第1走行履歴情報に基づいて第1交通状態を検出し、
前記第2車両は、前記検出手段によって第2走行履歴情報に基づいて第2交通状態を検出し、
前記対向車両は、前記通信手段を用いて前記第1車両から前記第1交通状態を取得するとともに、前記通信手段を用いて前記第2車両から前記第2交通状態を取得し、
前記対向車両は、前記通信手段を用いて前記第1交通状態および前記第2交通状態を前記後続車両に送信し、
前記後続車両は、前記予測手段を有する請求項1に記載のナビゲーションシステム。
【請求項7】
前記検出手段は、前記第1走行履歴情報に基づいて前記車線において発生した渋滞の開始地点を前記第1交通状態として検出可能であるとともに、前記第2走行履歴情報に基づいて前記渋滞の開始地点を前記第2交通状態として検出可能であり、
前記予測手段は、前記第1走行履歴情報に基づいて検出された渋滞の開始地点と、前記第2走行履歴情報に基づいて検出された渋滞の開始地点とを比較して、渋滞の開始地点の走行経路上での変化量を算出し、当該変化量に基づいて渋滞の開始地点の予測位置を前記予測交通状態として取得する請求項1から請求項6のいずれかに記載のナビゲーションシステム。
【請求項8】
前記検出手段は、前記第1走行履歴情報に基づいて前記車線において発生した渋滞の終了地点を前記第1交通状態として検出可能であるとともに、前記第2走行履歴情報に基づいて前記渋滞の終了地点を前記第2交通状態として検出可能であり、
前記予測手段は、前記第1走行履歴情報に基づいて検出された渋滞の終了地点と、前記第2走行履歴情報に基づいて検出された渋滞の終了地点とを比較して、渋滞の終了地点の走行経路上での変化量を算出し、当該変化量に基づいて渋滞の終了地点の予測位置を前記予測交通状態として取得する請求項1から請求項6のいずれかに記載のナビゲーションシステム。
【請求項9】
対向車線を走行する対向車と通信可能な通信手段と、
前記対向車線を走行する第1対向車から前記通信手段を用いて取得した第1走行履歴情報に基づいて、第1交通状態を検出するとともに、前記第1対向車のあとを走行する第2対向車から前記通信手段を用いて取得した第2走行履歴情報に基づいて、第2交通状態を検出する検出手段と、
前記第1交通状態と前記第2交通状態とを用いて前記対向車線における交通状態の変化量を算出し、当該変化量に基づいて、前記第2交通状態よりも時間的に後の前記対向車線における交通状態を予測した予測交通状態を取得する予測手段と、
を備え、
前記通信手段は、前記予測交通状態を前記第2対向車の後続車両に送信するナビゲーション装置。
【請求項10】
前記検出手段は、前記第1走行履歴情報に基づいて前記対向車線において発生した渋滞の開始地点を前記第1交通状態として検出するとともに、前記第2走行履歴情報に基づいて前記渋滞の開始地点を前記第2交通状態として検出し、
前記予測手段は、前記第1走行履歴情報に基づいて検出された渋滞の開始地点と、前記第2走行履歴情報に基づいて検出された渋滞の開始地点とを比較して、渋滞の開始地点の走行経路上での変化量を算出し、当該変化量に基づいて渋滞の開始地点の予測位置を前記予測交通状態として取得する請求項9に記載のナビゲーション装置。
【請求項11】
前記検出手段は、前記第1走行履歴情報に基づいて前記対向車線において発生した渋滞の終了地点を前記第1交通状態として検出するとともに、前記第2走行履歴情報に基づいて前記渋滞の終了地点を前記第2交通状態として検出し、
前記予測手段は、前記第1走行履歴情報に基づいて検出された渋滞の終了地点と、前記第2走行履歴情報に基づいて検出された渋滞の終了地点とを比較して、渋滞の終了地点の走行経路上での変化量を算出し、当該変化量に基づいて渋滞の終了地点の予測位置を前記予測交通状態として取得する請求項9に記載のナビゲーション装置。
【請求項12】
a)車線を走行する第1車両の第1走行履歴情報に基づいて第1交通状態を検出する工程と、
b)前記第1車両のあとを走行する第2車両の第2走行履歴情報に基づいて第2交通状態を検出する工程と、
c)前記第1交通状態と前記第2交通状態とを用いて前記車線における交通状態の変化量を算出し、当該変化量に基づいて、前記第2交通状態よりも時間的に後の前記車線における交通状態を予測した予測交通状態を取得する工程と、
d)前記第2車両の後続車両において、前記予測交通状態を用いて情報の提供を行う工程と、
を備えるナビゲーションシステムの動作方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−45343(P2013−45343A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−183700(P2011−183700)
【出願日】平成23年8月25日(2011.8.25)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月25日(2011.8.25)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]