
ナビゲーションシステム、マッチング方法、経路探索サーバおよびナビゲーション端末装置
【課題】 ナビゲーション端末装置の現在位置を道路上に補正するためのマッチング処理を正確に行う。
【解決手段】 ナビゲーションシステム10は、衛星航法手段212、自律航法手段213、マッチング処理手段215、地点記憶手段219、測位手段選択部214を備えている。分岐ノードを通過した後の走行距離を自律航法手段213から取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を地点記憶手段219に記憶し、測位手段選択部214は、所定の選択条件に従って衛星航法手段212または自律航法手段213の測位出力の何れかを選択し、マッチング処理手段215は、自律航法手段213が選択された場合は自律航法手段測位結果から移動体の進行方向を判別し、地点記憶手段219を参照し、進行方向に合致するリンク上の推定位置の地点をマッチング位置として選択する。
【解決手段】 ナビゲーションシステム10は、衛星航法手段212、自律航法手段213、マッチング処理手段215、地点記憶手段219、測位手段選択部214を備えている。分岐ノードを通過した後の走行距離を自律航法手段213から取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を地点記憶手段219に記憶し、測位手段選択部214は、所定の選択条件に従って衛星航法手段212または自律航法手段213の測位出力の何れかを選択し、マッチング処理手段215は、自律航法手段213が選択された場合は自律航法手段測位結果から移動体の進行方向を判別し、地点記憶手段219を参照し、進行方向に合致するリンク上の推定位置の地点をマッチング位置として選択する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、GPS受信機を用いた衛星航法手段と自律航法手段を測位手段として備え何れかの測位手段で現在位置を測位する、車載用あるいは歩行者用のナビゲーションシステムにおいて、測位手段で測位したナビゲーション装置またはナビゲーション端末装置の現在位置を道路上に補正するためのマッチング処理を正確に行うための技術に関するものであり、特に、分岐ノードを通過後のナビゲーション端末装置の移動距離に基づいて、ナビゲーション端末装置が到達している可能性のある各リンク上のそれぞれの地点情報を記憶し、衛星航法手段と自律航法手段による測位出力のうち信頼度の高い測位手段の測位出力に最も近いリンク上の地点に現在位置をマッチングするようにしたナビゲーションシステム、経路探索サーバ、ナビゲーション端末装置およびプログラムに関するものである。
【背景技術】
【0002】
従来から、地図データ、道路データを用いて、所望の出発地から目的地までの経路を探索して利用者を案内するナビゲーション装置、ナビゲーションシステムが知られており、このようなナビゲーション装置、ナビゲーションシステムとしては自動車に搭載して運転者に経路を案内するカーナビゲーション装置、携帯電話をナビゲーション端末として利用して経路探索サーバに経路探索要求を送り、その結果を受信して経路案内を受ける通信型のナビゲーションシステムなどが実用化されている。
【0003】
特に、通信型のナビゲーションシステムは、携帯電話などの携帯端末をナビゲーション端末として利用したシステムであって、歩行者用のナビゲーションシステムとしても用いられるものである。歩行者用のナビゲーションシステムとしては、交通機関を含めた経路案内機能を付加することが好ましく、徒歩経路の探索と案内に加えて、経路探索サーバに列車時刻データを蓄積し、所望の出発駅から所望の目的駅までの経路(乗車候補列車)を、徒歩経路の探索と案内に加えて案内する機能を有するナビゲーションシステムも存在する。
【0004】
また、航空機、列車、電車、バスなどの交通手段を用いて出発地から目的地までの経路を探索して案内する経路探索システムも知られている。このような経路探索システムは一般的には、ユーザが指定する出発日時、出発地、目的地、到着時刻等の経路探索条件に基づいて、各交通機関の運行データをデータベース化した運行データDB(データベース)を参照して、乗り継ぎを含めて出発地と目的地を結ぶ、利用可能な各交通手段を経路として順次たどり、経路探索条件に合致する案内経路(列車などの交通手段)の候補を1つまたは複数提示するように構成される。経路探索条件としては更に、所要時間、乗り継ぎ回数、運賃などの条件を指定できるようにされているのが一般的である。
【0005】
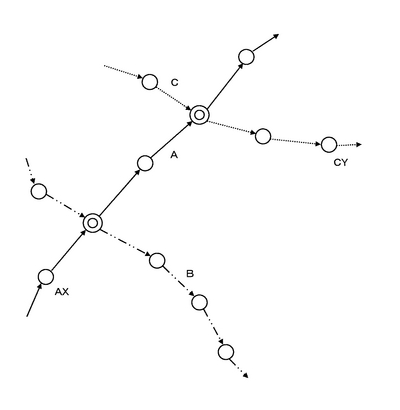
歩行者ナビゲーションシステムやカーナビゲーションシステムにおける経路探索のための道路ネットワークは、例えば、図6に示すように道路A、B、Cからなる場合、道路A、B、Cの端点、交差点、屈曲点などをノードとし、各ノード間を結ぶ道路を有向性のリンクで表し、ノードデータ(ノードの緯度・経度)、リンクデータ(リンク番号)と各リンクのリンクコスト(リンクの距離またはリンクを走行するのに必要な所要時間)をデータとしたリンクコストデータとで道路ネットワークデータを構成している。すなわち、図6において、○印、◎印がノードを示し、◎印は道路の交差点を示している。各ノード間を結ぶ有向性のリンクを矢印線(実線、点線、2点鎖線)で示している。リンクは、道路の上り、下りそれぞれの方向を向いたリンクが存在するが、図6では図示を簡略化するため矢印の向きのリンクのみを図示している。
【0006】
このような道路ネットワークのデータを経路探索用のデータベースとして経路探索を行う場合、出発地のノードから目的地のノードまで連結されたリンクをたどりそのリンクコストを累積し、累積リンクコストの最少になる経路を探索して案内する。すなわち、図6において出発地をノードAX、目的地をノードCYとして経路探索を行う場合、ノードAXから道路Aを走行して2つ目の交差点で右折して道路Cに入りノードCYにいたるリンクを順次たどりリンクコストを累積し、リンクコストの累積値を最少になる経路を探索して案内する。図6ではノードAXからノードCYに至る他の経路は図示されていないが、実際にはそのような経路が他にも存在するため、ノードAXからノードCYに至る可能な経路を同様にして探索し、それらの経路のうちリンクコストが最少になる経路を最適経路として決定するものである。この手法は、例えば、ダイクストラ法と呼ばれる周知の手法によって行われる。
【0007】
上記のような道路ネットワークは、図6に模式的に示すようにリンクコストが固定であり、経路が定まればその累積リンクコストは一意に定まる静的なネットワークデータであり、データの量も道路ネットワークの量に比例したものになる。交通機関の運行ネットワークデータも同様でありバス路線が設定されている道路ネットワークのデータが路線ネットワークのデータとして使用される。
【0008】
現在、このようなナビゲーションシステムを利用した路線バスの運行管理システムも存在している。このような運行管理システムは、例えば、各路線バスの車両に移動体端末を設置し、現在位置を測位して路線ネットワーク上にマッチング処理することで、各車両の運行位置を把握し、各停留所に車両が到着する予定時刻を表示するサービスを行ったり、道路の渋滞状況を検出したり、車両の配車状況や車両の運行状況の履歴を管理したりするシステムである。
【0009】
一般に、上記のようなナビゲーションシステムにおいて、ナビゲーション端末装置は測位手段としてGPS受信機を搭載している。この測位手段は複数のGPS衛星信号が送信するGPS衛星信号を受信して処理し、現在位置(緯度・経度)を測位している。この方法は衛星航法と言われる。GPS衛星信号はトンネル内や地下では受信することができず、また、ビルが密集した場所ではGPS信号の反射があり、測位精度が悪化する。
【0010】
このため、車載用のナビゲーション装置などでは、加速度センサー、舵角センサー、ジャイロ、車速センサーなどを設けて現在位置を測位する測位手段を併用している。この測位方法は各自律航法と言われる。携帯電話をナビゲーション端末装置とする歩行者用のナビゲーション端末装置においても最近では姿勢検出センサーやジャイロを搭載して自律航法による測位機能を併用させた機器も出現している。
【0011】
GPS受信機を用いた測位手段による現在位置にはGPS衛星信号の処理における演算誤差が含まれることは周知である。一般的にGPSの単独測位精度は一般的に10m強であり、GPS測位手段で測位した位置(緯度・経度)が道路上から外れる場合がある。マッチング処理とはこの誤差による道路からのずれを修正する処理をいう。通常は測位した現在位置(測位した緯度・経度)に最も近い道路を抽出し、現在位置からこの道路に垂線をおろし、道路との交点を現在位置(補正緯度・経度)として補正する処理である。このような処理方法を投影法という。地図上の道路データを使用して上記の処理を行う方法をマップマッチングと言い、経路探索サーバが探索した経路データを使用して上記の処理を行う方法をルートマッチングという。
【0012】
また、自律航法手段により測位した位置情報は、前回測位した自車位置から各種センサーによって計測した移動距離や方位の変化分を累積して現在位置を測位するものであり、測位誤差が累積されてゆく。この場合にもマッチング処理が必要になる。一般的にはGPSを使用した衛星航法による測位では自車の絶対位置が測位できるので、天空が開け、GPS衛星信号の受信状態が良い場所では衛星航法による測位結果が用いられる。
【0013】
マッチング処理を行って自車位置の測位誤差の修正を行うことにより、地図上に自車位置を表示するにあたって、案内経路である道路上に正しく表示することができ、利用者は自車位置が案内経路である道路上を走行していることを確認しながら運転を続けることができる。従って、マッチングのエラーが生じると、案内経路から外れた道路上に自車位置が表示され、利用者は案内経路上を走行しているにもかかわらず、案内経路から外れたものと誤認してしまうことになる。
【0014】
一方、現在位置が案内経路からの逸脱し、そのずれ量が一定の範囲(一定時間経過、あるいは一定の距離)を超えると、当初の経路探索で案内した経路が役に立たなくなるため、その時の現在位置を起点にして目的地までの案内経路を再探索してナビゲーション装置に配信し直すことが必要になる。この再探索の処理をリルート処理と称している。
【0015】
すなわち、マッチング処理は、自社位置を地図上に表示する際に正しく案内経路である道路上を走行しているか否かを利用者に告知する目的と、自社位置が案内経路から一定の範囲以上逸脱した際にリルート処理を起動し、目的地までの案内経路を改めて探索する目的のために行われるものである。
【0016】
マップマッチング処理においては、通常、経路探索のための道路ネットワークデータ(図6参照)を用いて行う。測位した現在位置に対してマッチングすべき道路が接近して複数ある場合には、補正した現在位置が本来の経路(経路探索により探索した出発地から目的地までの最短の案内経路)上でなく、隣接する他の道路上に誤って補正されるエラーが生じる場合がある。特に道路が狭い角度で分岐し、分岐した道路が分岐点以降狭い間隔で平行しているような道路構造の場所では特にマッチング処理でエラーが生じ易い。
【0017】
このようなマッチング処理のエラーが生じると、先に述べたように、正しい案内経路を走行しているにもかかわらず利用者に案内経路から逸脱したという誤った判断をさせてしまうことになる。そして、案内経路からの逸脱の範囲が一定の範囲を超えている場合には、正しい案内経路を走行していても、リルート処理が起動されてしまい、経路探索処理の無駄が発生してしまう。
【0018】
そして、リルート処理の結果、新たな案内経路がナビゲーション端末装置に伝えられると実際には当初の正しい案内経路を走行しているにもかかわらず、他の道路上を出発点とした新たな案内経路に走行道路を変更するか、時間が経過して現在位置が当初の案内経路戻り再度リルートが行われるまで利用車の判断で走行を続けるなど、一時的に案内経路が役に立たない状態に陥る。
【0019】
従ってマッチング処理には正確性が求められ、この精度を向上させるための技術も種々行われている。例えば、下記の特許文献1(特開平8−68656号公報)に開示された「車載用ナビゲーション装置」が知られている。
【0020】
この特許文献1に開示された車載用ナビゲーション装置は、予め、経路探索部により出発地と目的地を結ぶ誘導経路が探索され、誘導経路記憶部に記憶される。GPS受信機の検出車両位置に基づき、マップマッチング部がCD−ROM等のメモリに記憶された車両位置周辺の地図データを用いて車両位置近くの複数のマッチング候補道路を選び出し、その中に誘導経路があるときは該誘導経路の優先度を上げて1つのマッチング候補道路を決定し、該決定したマッチング候補道路上に車両位置を修正するように構成されている。
また、地図画像描画部は車両位置周辺の地図データを用いて修正車両位置を含む地図画像を誘導経路とともにビデオRAMに描画し、更に、地図画像上の修正車両位置に相当する箇所に車両位置マークを描画する。ビデオRAMの画像は映像変換部により読み出され、所定の映像信号に変換されたのちディスプレイ装置に出力されて画面表示されるように構成されている。
【0021】
すなわち、特許文献1に開示された車載用ナビゲーション装置は、誘導経路を含む複数のマッチング候補道路がある場合、誘導経路を優先してマッチング処理することによりマッチング処理の精度を向上させようとしたものである。
【0022】
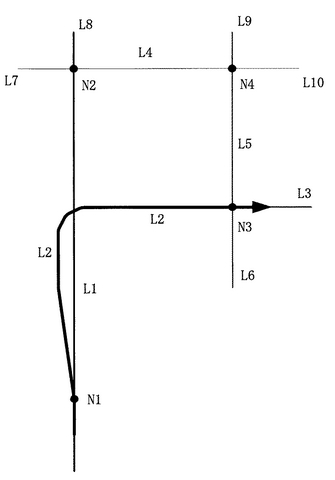
前述したように、道路が狭い角度で分岐し、分岐した道路が分岐点以降狭い間隔で平行しているような道路構造の場所では特にマッチング処理でエラーが生じ易い。また、幹線道路から側道に分岐する場合なども、幹線道路と側道が非常に接近したままなので、マッチング処理を誤りやすい。例えば、図7に示すように道路が分岐ノードN1において、狭い角度でリンクL1とL2に分岐し分岐後リンクL1とL2とがしばらく平行して走り、リンクL2が立体交差でリンクL1の下または上を通過する道路構造であり、案内経路がL2を進行してノードN3をリンクL3に直進する経路である場合の投影法を用いたマッチング処理について説明する。
【0023】
図8には各時点において測位した現在位置P1〜P4が×印で図示されおり、この現在位置が案内経路であるリンクL2にマッチングされれば問題ないが、リンクL2とリンクL1の間の距離が小さい場合、案内経路でないリンクL1にマッチングされるエラーを生じることがある。すなわち、図8の測位点P4の測位データが得られた瞬間において、測位位置がリンクL2から所定距離以上離れたので、マッチング処理が行われる。ナビゲーション端末装置20はリンクL2を走行しているのであるから、位置Paにマッチング処理されればよいのであるが、測位した現在位置P4に最も近いリンクはリンクL1であるから、投影法により位置Pbにマッチングされてしまう。
【0024】
このようにマックチングエラーが生じると、表示手段に表示される自車位置が案内経路であるリンクL2から外れ、リンクL1上に表示される不都合が生じる。路線バスの車両運行管理システムにおいては各バス車両の位置を正確に把握し運行状況を正確に管理する必要があり、マッチング精度を向上させることが望まれている。
【0025】
また、このエラーが一定の範囲(時間または走行距離)を超過すると、経路のリルート(再探索要求)が発生する。リルートの結果、新たに探索された経路は、リンクL1を直進してノードN2に至り、ノードN2で右折してリンクL4をノードN4まで走行し、ノードN4を右折してリンクL5をノードN3まで走行し、ノードN3左折してもとの案内経路であるリンクL3に至る経路である。この場合、現在位置を別の道路にマッチングしてしまったので、リルート処理した結果誤ったガイダンス音声を発生してしまうことになり、利用者を混乱させるので、このような不具合を防止することが好ましい。
【0026】
また、実際の自車位置が当初の案内経路であるリンクL2にあるので、このリルート処理は無駄な処理であり、利用者を混乱させるという不都合を生じる。この観点からもマッチング精度を向上させることが望まれている。
【0027】
このような問題点を解決する技術として、下記の特許文献2(特開2004−271293号公報)に開示された「ナビゲーション装置」が知られている。この特許文献2に開示されたナビゲーション装置は、表示部と、現在位置表示情報を記憶する履歴位置情報D
Bと、現在位置情報をGPSから獲得する位置情報受信部と、現在位置情報を解析して現在位置を算出する位置情報解析部と、地図情報を記憶するMAPDBと、車両の車速パルス値と進行方向を計測する計測部と、車速パルス及び進行方向と、直前の現在位置表示情報とから予測移動距離及び予測移動方向を算出し、現在位置と地図情報とに基づいて、測位位置情報を算出する中央処理部と、算出された予測移動距離、予測移動方向及び測位位置情報を記憶する位置情報DBと、許容範囲の閾値テーブルを記憶する許容テーブルDBとを備えて構成されている。
【0028】
そして、このナビゲーション装置においては、中央処理手段は、位置情報記憶手段に記憶されている予測移動距離及び予測移動方向から車両の予測移動位置を算出し、当該予測移動位置と許容テーブル記憶手段に記憶されている閾値テーブルに基づいて、予測位置範囲を決定し、位置情報記憶手段に記憶されている測位位置情報と予測位置範囲を比較して、測位位置情報が予測位置範囲内であれば、測位位置情報を現在位置表示情報とし、測位位置情報が予測位置範囲外であれば、予測移動位置を現在位置表示情報とするようにしている。
【0029】
また、本願の出願人は、路線バスの運行管理におけるマッチング処理の精度を向上させる目的で、既に特願2005−013957号の発明についての特許出願を行っている。
【0030】
この特願2005−013957号(以下、「先願1」という。)に開示された発明においては、路線バスの車両に設置される移動体端末装置と運行管理サーバとがネットワークを介して接続されるように構成されている。そして、移動体端末装置は、衛星航法に基づき位置を検出する位置検出手段と、自律航法手段と、通信手段と、マッチング手段と、路線ネットワークデータを記憶した路線データ記憶手段と、を備え、路線ネットワークデータは、所定のバス路線のネットワークデータのみで構成され、マッチング手段は、前記位置検出手段が検出した現在位置データを路線ネットワークデータにマッチング処理し、マッチング処理した現在位置データを、通信手段を介して運行管理サーバに送信するように構成されたものである。
【0031】
また、先願1においては、駅前のバスターミナルなど、周囲にビルが密集しGPS測位におけるマルチパスの影響からマッチングエラーが生じ易いエリアにおいては、GPS測位手段を使用せず、自律航法を使用した測位手段を用いて測位、マッチング処理するように構成されている。
【0032】
【特許文献1】特開平8−68656号公報(図1、図5)
【特許文献2】特開2004−271293号公報(図1、図4)
【発明の開示】
【発明が解決しようとする課題】
【0033】
前述したように、図7、図8に示すように道路が狭い角度で分岐し、分岐した道路が分岐点以降狭い間隔で平行しているような道路構造の場所では特にマッチング処理でエラーが生じ易い。
【0034】
しかしながら、上記特許文献1に開示された車載用ナビゲーション装置においては、誘導経路を優先してマッチング処理するものであるが、これは、車両が誘導経路に従って正しく走行しているという前提が満たされる限りにおいては、マッチングの精度を高めることができるが、車両が誘導経路から外れて走行している場合には、誤ったマッチングを行ってしまうという問題点があった。
【0035】
また、上記特許文献2に開示された技術では、一定の閾値範囲を設定しておき、GPSにより測位した現在位置がその閾値範囲内にあればその測位位置を現在位置とするものであり、道路が狭い角度で分岐し、分岐した道路が分岐点以降、狭い間隔で平行しているような道路構造の場所では正確にマッチングを行える保証がないという問題点があった。
【0036】
また、先願1に開示した発明は、バス路線のように設定された一定の経路を走行するバス車両などのマッチング処理においては効果を発揮するが、一般の車両には適用することができないという問題点があった。
【0037】
本願の発明者は上記の問題点を解消すべく種々検討を重ねた結果、分岐ノードを通過後のナビゲーション端末装置の移動距離に基づいて、ナビゲーション端末装置が到達している可能性のある各リンク上のそれぞれの地点情報を記憶し、衛星航法手段と自律航法手段による測位出力のうち信頼度の高い測位手段の測位出力に最も近い地点または進行方向に合致するリンク上の地点に現在位置をマッチングすればマッチング処理の精度を向上させ得ることを想到して本発明を完成するに至ったものである。
【0038】
すなわち、本発明は、上記の問題点を解消することを課題とし、測位手段で測位したナビゲーション装置またはナビゲーション端末装置の現在位置を道路上に補正するためのマッチング処理を正確に行うことができるナビゲーションシステム、経路探索サーバ、ナビゲーション端末装置およびプログラムを提供することを目的とするものである。
【課題を解決するための手段】
【0039】
前記課題を解決するために、本願の請求項1にかかる発明は、
衛星航法手段と自律航法手段と、衛星航法手段または自律航法手段により測位した移動体の現在位置をノードとノード間を結ぶリンクにより表現されたネットワークデータにマッチングするマッチング処理手段を有するナビゲーションシステムであって、
前記ナビゲーションシステムは、地点記憶手段と、測位手段選択部と、を備え、
前記マッチング処理手段は、前記自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶し、
前記測位手段選択部は、所定の選択条件に従って前記衛星航法手段または自律航法手段の測位出力の何れかを選択し、
前記マッチング処理手段は、前記測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、前記地点記憶手段を参照し、当該進行方向に合致するリンク上の前記推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、前記地点記憶手段を参照し、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択することによりマッチングすることを特徴とする。
【0040】
また、本願の請求項2にかかる発明は、請求項1の発明にかかるナビゲーションシステムにおいて、前記地点記憶手段に記憶される推定位置の地点情報は分岐ノード毎にリセットされることを特徴とする
【0041】
また、本願の請求項3にかかる発明は、請求項1または請求項2の発明にかかるナビゲーションシステムにおいて、前記マッチング処理手段は、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しないようにしたことを特徴とする。
【0042】
本願の請求項4にかかる発明は、
衛星航法手段と自律航法手段と、衛星航法手段または自律航法手段により測位した移動体の現在位置をノードとノード間を結ぶリンクにより表現されたネットワークデータにマッチングするマッチング処理手段と、地点記憶手段と、測位手段選択部と、を有するナビゲーションシステムにおけるマッチング方法であって、
前記マッチング処理手段が、前記自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶するステップと、
前記測位手段選択部が、所定の選択条件に従って前記衛星航法手段または自律航法手段の測位出力の何れかを選択するステップと、
前記マッチング処理手段が、前記測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、前記地点記憶手段を参照し、当該進行方向に合致するリンク上の前記推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、前記地点記憶手段を参照し、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択するステップと、
からなることを特徴とする。
【0043】
また、本願の請求項5にかかる発明は、請求項4の発明にかかるマッチング方法において、前記推定位置の地点情報を地点記憶手段に記憶するステップは、分岐ノード毎にリセットする処理を含むことを特徴とする。
【0044】
また、本願の請求項6にかかる発明は、請求項4または請求項5の発明にかかるマッチング方法において、前記推定位置の地点情報を地点記憶手段に記憶するステップは、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しない処理を含むことを特徴とする。
【0045】
本願の請求項7にかかる発明は、
衛星航法手段と自律航法手段を備えたナビゲーション端末装置とネットワークを介して接続され、前記衛星航法手段または自律航法手段により測位した移動体の現在位置をノードとノード間を結ぶリンクにより表現されたネットワークデータにマッチングするマッチング処理手段を有する経路探索サーバからなるナビゲーションシステムを構成する経路探索サーバであって、
前記経路探索サーバは、更に、地点記憶手段と、測位手段選択部と、を備え、
前記マッチング処理手段は、前記自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶し、
前記測位手段選択部は、所定の選択条件に従って前記衛星航法手段または自律航法手段の測位出力の何れかを選択し、
前記マッチング処理手段は、前記測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、前記地点記憶手段を参照し、当該進行方向に合致するリンク上の前記推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、前記地点記憶手段を参照し、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択することによりマッチングすることを特徴とする。
【0046】
また、本願の請求項8にかかる発明は、請求項7の発明にかかる経路探索サーバにおいて、前記地点記憶手段に記憶される推定位置の地点情報は分岐ノード毎にリセットされることを特徴とする。
【0047】
また、本願の請求項9にかかる発明は、請求項7または請求項8の発明にかかる経路探索サーバにおいて、前記マッチング処理手段は、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しないようにしたことを特徴とする。
【0048】
本願の請求項10にかかる発明は、
衛星航法手段と自律航法手段を備え、前記衛星航法手段または自律航法手段により測位した移動体の現在位置をノードとノード間を結ぶリンクにより表現されたネットワークデータにマッチングするマッチング処理手段を有するナビゲーション端末装置がネットワークを介して経路探索サーバに接続されるナビゲーションシステムを構成する前記ナビゲーション端末装置であって、
前記ナビゲーション端末装置は、更に、地点記憶手段と、測位手段選択部と、を備え、
前記マッチング処理手段は、前記自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶し、
前記測位手段選択部は、所定の選択条件に従って前記衛星航法手段または自律航法手段の測位出力の何れかを選択し、
前記マッチング処理手段は、前記測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、前記地点記憶手段を参照し、当該進行方向に合致するリンク上の前記推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、前記地点記憶手段を参照し、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択することによりマッチングすることを特徴とする。
【0049】
また、本願の請求項11にかかる発明は、請求項10の発明にかかるナビゲーション端末装置において、前記地点記憶手段に記憶される推定位置の地点情報は分岐ノード毎にリセットされることを特徴とする。
【0050】
また、本願の請求項12にかかる発明は、請求項10または請求項11の発明にかかるナビゲーション端末装置において、前記マッチング処理手段は、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しないようにしたことを特徴とする。
【発明の効果】
【0051】
請求項1にかかる発明においては、自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶し、マッチング処理手段は、測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、進行方向に合致するリンク上の推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択する。
従って、狭い角度でリンクが分岐する分岐点であっても、ナビゲーション端末装置が走行を継続する間にナビゲーション端末装置での正確な進行方向(方位)が得られるため、より正確なマッチングを行うことができるようになる。
【0052】
また、ナビゲーション端末装置が進行する可能性のある複数のリンクについて、各リンク上の走行距離に該当する地点情報を地点記憶手段に蓄積しているから、万が一マッチングを誤っていても正しい位置への復帰が可能となる。すなわち、ある地点を選択してマッチング処理しても、他の候補リンクについて走行距離情報からリンク上の地点が更新維持されるから、測位を繰り返すうちに、もし他のリンク上の位置の方が正しいと判断したら、そちらの候補にマッチング位置を修正することができるようになる。
【0053】
この修正までの時間あるいは移動距離(走行距離)は、ナビゲーション端末装置の走行方向が定まる短い時間あるいは距離の間に行うことができるからリルート処理要求を行う前に正しいリンクへのマッチング修正ができ、無駄なリルート処理を行うようなケースを減少させることもできるようになる。
【0054】
また、請求項2にかかる発明においては、請求項1にかかるナビゲーションシステムにおいて、前記地点記憶手段に記憶される推定位置の地点情報は分岐ノード毎にリセットされる。従って、分岐ノード毎に精度の高いマッチング処理を行うことができるようになる。また、地点記憶手段に記憶する候補リンクの地点情報が一方的に増えてしまうこともなく、候補リンク追跡の処理負荷を軽くすることができるようになる。
【0055】
また、請求項3にかかる発明においては、請求項1または請求項2にかかるナビゲーションシステムにおいて、前記マッチング処理手段は、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しないようにされている。従って、地点記憶手段に記憶する候補リンクの地点情報の量を抑制することがなく、候補リンク追跡の処理負荷を軽くすることができるようになる。
【0056】
請求項4にかかる発明においては、自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶し、マッチング処理手段は、測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、進行方向に合致するリンク上の推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択する。
従って、狭い角度でリンクが分岐する分岐点であっても、ナビゲーション端末装置が走行を継続する間にナビゲーション端末装置での正確な進行方向(方位)が得られるため、より正確なマッチングを行うことができるようになる。
【0057】
また、請求項5にかかる発明においては、請求項4にかかるマッチング方法において、前記地点記憶手段に記憶される推定位置の地点情報は分岐ノード毎にリセットされる。従って、分岐ノード毎に精度の高いマッチング処理を行うことができるようになる。また、地点記憶手段に記憶する候補リンクの地点情報が一方的に増えてしまうこともなく、候補リンク追跡の処理負荷を軽くすることができるようになる。
【0058】
また、請求項6にかかる発明においては、請求項4または請求項5にかかるマッチング方法において、前記マッチング処理手段は、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しないようにされている。従って、地点記憶手段に記憶する候補リンクの地点情報の量を抑制することがなく、候補リンク追跡の処理負荷を軽くすることができるようになる。
【0059】
請求項7ないし請求項9にかかる発明においては、それぞれ請求項1ないし請求項3にかかるナビゲーションシステムを構成する経路探索サーバを提供することができるようになる。
【0060】
請求項10ないし請求項12にかかる発明においては、それぞれ請求項1ないし請求項3にかかるナビゲーションシステムを構成するナビゲーション端末装置を提供することができるようになる。
【発明を実施するための最良の形態】
【0061】
以下、本発明の具体例を実施例及び図面を用いて詳細に説明する。図1は本発明の実施例にかかるナビゲーションシステムの構成を示すブロック図である。なお、本実施例は車載用のナビゲーション端末装置と経路探索サーバを備えた通信型のナビゲーションシステムを例にとり説明するが、本発明は、通信型のナビゲーションのナビゲーションシステムに限ることなく、スタンドアロン型のナビゲーションシステムであってもよい。
【実施例】
【0062】
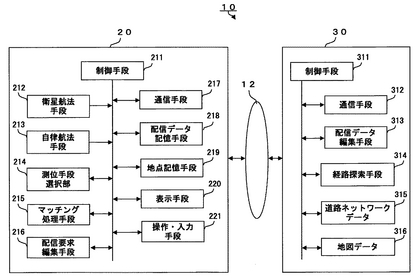
本発明の実施例にかかるナビゲーションシステム10は図1に示すように、ネットワーク12を介して接続される車載用のナビゲーション端末装置20と経路探索サーバ30とを備えて構成されている。経路探索サーバ30は、ナビゲーション端末装置20から、出発地、目的地などの経路探索条件に基づいて最適な経路を探索して案内経路のデータや地図データを配信する。ナビゲーション端末装置20は地図データ、案内経路のデータと、ナビゲーション端末装置20現在位置(自車位置)を重ね合わせて表示手段に表示し、目的地までの経路のガイダンスを受けるように構成されている。
【0063】
経路探索サーバ30は、制御手段311、通信手段312、配信データ編集手段313、経路探索手段314、経路探索用の道路ネットワークデータ35を蓄積したデータベースと地図データ316を蓄積したデータベースを備えている。ナビゲーションシステム10が歩行者用のナビゲーション機能を備える場合には、徒歩専用の道路を探索するための歩行者ネットワークデータや交通機関を用いた経路探索のための交通ネットワークデータを蓄積したデータベース(図示せず)を備える。道路ネットワークデータ315は図6を参照して説明したように構成されている。
【0064】
制御手段311は、図示してはいないがRAM、ROM、プロセッサを有するマイクロプロセッサであり、ROMに格納された制御プログラムにより各部の動作を制御する。通信手段312は、ネットワーク12を介してナビゲーション端末装置20と通信するためのインターフェースである。配信データ編集手段313は、経路探索の結果得た最適な案内経路のデータや地図データをナビゲーション端末装置20に配信するためのデータに編集するためのものである。
【0065】
経路探索手段314はマルチモーダルな経路探索エンジンであって、ナビゲーション端末装置20から送信された検索条件(出発地または現在地、目的地、移動手段、出発時刻など)に基づいて道路ネットワークデータ315を参照して出発地または現在地から目的地までの最適な経路(距離や所要時間が最小になる経路)を探索する。探索された案内経路は配信データ編集手段313で編集されナビゲーション端末装置20に配信される。経路探索手段314は自動車と徒歩、徒歩と交通機関を併用した経路探索機能を有する場合、経路探索手段314はマルチモーダルな経路探索エンジンを用いる。このような経路探索エンジンは例えば特開2000−258184号公報などに開示されている。経路の探索方法としては周知のダイクストラ法と呼ばれる手法が適用される。
【0066】
また、経路探索サーバ30はナビゲーション端末装置20に必要な地図データを配信する。地図データ316は、緯度、経度によって所定の大きさに分割された単位地図からなり、通常、ナビゲーション端末装置20の現在位置を中心に上下、左右の9枚分の地図がナビゲーション端末装置20に配信される。ナビゲーション端末装置20が移動し、地図データが不足すると、ナビゲーション端末装置20は不足分の単位地図の配信を経路探索サーバ30に要求し、所用の単位地図の配信を受ける。
【0067】
ナビゲーション端末装置20は経路探索サーバ30から地図データ、案内経路のデータの配信を受けると、地図、案内経路、自車現在位置を表示し、利用者は目的地までの経路の案内を受けることができる。
【0068】
ナビゲーション端末装置20は、図1に示すように、制御手段211、衛星航法手段212、自律航法手段213、測位手段選択部214、マッチング処理手段215、配信要求編集手段216、通信手段217、配信データ記憶手段218、地点記憶手段219、表示手段220、操作・入力手段221を備えて構成されている。
【0069】
制御手段211は、図示してはいないがRAM、ROMを有するマイクロプロセッサ(CPU)を備えて構成され、ROMに格納された制御プログラムにより各部の動作を制御する。操作・入力手段221は、数字キーやアルファベットキー、その他の機能キー、選択キー、スクロールキーなどからなる操作・入力のためのものであり、出力手段である表示手段221に表示されるメニュー画面から所望のメニューを選択し、あるいは、キーを操作して種々の入力操作を行うものである。従って、表示手段220は操作・入力手段221の一部としても機能する。通信手段217は、ネットワーク12を介して経路探索サーバ30と通信するためのインターフェースである。
【0070】
配信要求編集手段216は、操作・入力手段221を使用して入力された出発地、目的地、あるいは、衛星航法手段212または自律航法手段213で測位したナビゲーション端末装置20の現在位置を出発地として、これらの情報を経路探索条件とした経路探索要求を編集するものである。経路探索条件には移動手段(自動車、徒歩、交通機関など)、出発時刻や到着時刻などを設定することもできる。また、配信要求編集手段216は、ナビゲーション端末装置20の移動に伴い、経路探索サーバ30から配信を受けている地図データに不足が生じた場合に不足分の地図データを要求する地図データ要求を編集し、経路探索サーバ30に送信する。
【0071】
配信データ記憶手段218は、経路探索サーバ30から配信された経路探索結果である案内経路データ、地図データ、ガイダンスなどを記憶するものであり、これらのデータは必要に応じて配信データ記憶手段218から読み出され、表示手段220に表示される。一般的には、ナビゲーション端末装置20の現在位置を含む一定の縮尺、一定の範囲の地図に、案内経路と、ナビゲーション端末装置20の現在位置を示すマークを重ね合わせて該現在位置マークが表示画面の中心になるように表示する。また、経路探索サーバ30から配信される案内経路データに音声ガイド(例えば、「この先、300m交差点です。左折して下さい」などの音声メッセージ)のデータが付加されている場合は、スピーカを介して音声メッセージを再生出力してユーザをガイドする。
【0072】
衛星航法手段212はGPS受信機を備えGPS衛星信号を受信処理してナビゲーション端末装置20の現在位置を測位する第1の測位手段である。自律航法手段213は加速度センサー、舵角センサー、ジャイロ、車速センサーなどを備え、ナビゲーション端末装置20の現在位置を測位する第2の測位手段である。先に述べたように、一般的にはGPSを使用した衛星航法による測位では自車の絶対位置が測位できるので、天空が開け、GPS衛星信号の受信状態が良い場所では衛星航法手段212による測位結果が優先されて用いられる。
【0073】
トンネル内などGPS衛星信号を受信できない場所では当然に自律航法手段213による測位結果が用いられる。またGPSによる測位結果には10m程度の測位誤差が含まれるため、10mの範囲内に案内経路以外のリンクが存在する場所では、自律航法手段213による測位結果のほうが衛星航法手段212による測位結果より信頼度が高くなるので自律航法手段213による測位結果が優先されて用いられる。マルチパスの影響により衛星航法手段212による測位結果の誤差が大きくなる場所においても同様である。測位手段選択部214は以上のような条件を判別して衛星航法手段212と自律航法手段213の何れかの測位結果を選択する。なお、自律航法手段213による測位結果は、測位手段選択部214の選択のいかんにかかわらず保持され、自車の移動距離や方位等の算出結果も保持される。
【0074】
マッチング処理手段215は、衛星航法手段212、自律航法手段213等により測位した現在位置を道路上に補正する処理を行うものである。従来のマッチング処理は、前述したように、測位された現在位置に最も近い道路を選択し、この道路に垂線を下ろしてその交点を現在位置として補正する投影法が用いられる。本発明ではこの投影法をとらず、以下に詳述する処理によりマッチングを行う。
【0075】
すなわち、マッチング処理手段215は、分岐ノードを通過後のナビゲーション端末装置20の移動距離(走行距離)に基づいて、ナビゲーション端末装置20が到達している可能性のある各リンク上のそれぞれの地点情報を地点記憶手段219に記憶し、測位手段選択部214が衛星航法手段212と自律航法手段213による測位出力のうち信頼度の高い測位手段を選択し、マッチング処理手段215は、地点記憶手段219に記憶された地点情報を参照して、測位手段選択部214で選択された測位手段が測位した現在位置に最も近い地点を選択してこの地点をマッチング位置とする処理を行うものである。測位手段選択部214により自律航法手段213が選択された場合はナビゲーション端末装置20の走行方位が得られるので、当該走行方位に合致した(最も近い)リンク上の地点を選択してその地点をマッチング位置として選択する。衛星航法手段212が選択された場合は、衛星航法手段212が測位した測位位置(現在位置)に最も近い推定位置の地点をマッチング位置として選択すればよい。
【0076】
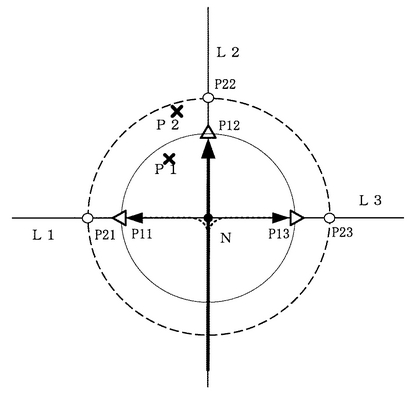
以上のマッチング処理の概念を図2に示す模式図を参照して説明する。ナビゲーション端末装置20が交差点や分岐点のノードNを通過した後のマッチング処理において、自車がとり得るリンクは、L1〜L3の3方向である。マッチング処理手段215は、自律航法手段213または衛星航法手段212によりノードN通過後の移動距離(走行距離)に基づいて、上記可能性のある全てのリンクL1〜L3上の到達推定位置を地点情報(P11〜P13)として地点記憶手段219に記憶する。この時の測位位置はP1であったとする。
【0077】
ノードN通過後のナビゲーション端末装置20の移動距離(走行距離)は、衛星航法手段212(GPS)による測位履歴から算出することもできるが、誤差が累積され、自律航法手段213による距離計測よりも誤差が大きくなる場合があるので、自律航法手段213による移動距離を用いることが好ましい。
【0078】
さらにナビゲーション端末装置20が走行し、測位位置がP2になった場合も同様の処理を行い、走行距離に基づいて全てのリンクL1〜L3上の到達推定位置を地点情報(P21〜P23)として地点記憶手段219に記憶する。以下、測位位置を得る都度、同様に各リンクL1〜L3上の地点情報を逐次記憶してゆく。
【0079】
次に、マッチング処理手段215は、測位位置P1、P2のデータあるいは自律航法手段213に備える舵角センサの出力から、ナビゲーション端末装置20の進行方向(方位)を算出し、この方位に合致する(あるいは最も近い方位を持つ)リンクを判別する。図2の場合、リンクL2が進行方向に最も近い方位のリンクであり、そのリンク上の地点、すなわち、図2の場合、位置P21(方位がP2到達時点まで決定できなかった場合は位置P22)をマッチング位置として選択する。
【0080】
測位手段選択部214により衛星航法手段212が選択された場合は、自律航法手段213が選択された場合と同様に衛星航法手段212(GPS)による測位履歴から進行方向(方位)を算出して、当該進行方向に最も近い方位を持つリンクを特定してマッチング位置を選択することもできるが、誤差が大きい場合は、衛星航法手段212が測位した測位位置(現在位置)に最も近い推定位置の地点をマッチング位置として選択すればよい。
【0081】
ナビゲーション端末装置20が何れかのリンクL1〜L3を走行し、次の分岐ノードに到達したら、地点記憶手段219に記憶した地点情報はリセットされ、次の分岐ノードからの各リンクについて前記と同様のマッチング処理が実行される。このように、新たな分岐に到達したときに各候補リンクの地点情報をリセットするように構成すれば、追跡する候補リンクの地点情報が一方的に増えてしまうこともない。あるいは所定地を越えた候補リンクの地点情報は追跡しない(維持しない)ようにして、候補リンク追跡の負荷を軽くすることもできる。
【0082】
なお、衛星航法手段212と自律航法手段213の何れが測位した位置情報を用いるかは、測位手段選択部214が両者の信頼度が高い方を判別して決定する。前述したように、衛星航法手段212の測位結果には10m程度の誤差があることから、半径10mの範囲内に案内経路のリンクと隣接他の道路のリンクが存在するかを判別し、この範囲内に他の道路のリンクが存在する場合は自律航法手段213による測位結果を用いる。なお、余裕をもって判別するためにはこの判別範囲を10m以内でなく20m以内の範囲とすればよい。
【0083】
トンネルの中で分岐するような場合も、衛星航法手段212(GPS)が使用できないので、自律航法手段213を選択する。マルチパスの影響が大きくなるエリアが特定されていれば、当該エリア内でも同様に自律航法手段213が選択される。なお、衛星航法手段212(GPS)の信頼度が高いときに、GPSによる測位位置から離れすぎたリンクは候補リンクとせず、地点情報の維持(記憶)を行わないようにして、制御手段211の処理負荷を軽くしても良い(例えばGPSの信頼度が十分あってGPSによる測位位置から200m以上離れた候補リンクは対象としないなどの判別を行う)。
【0084】
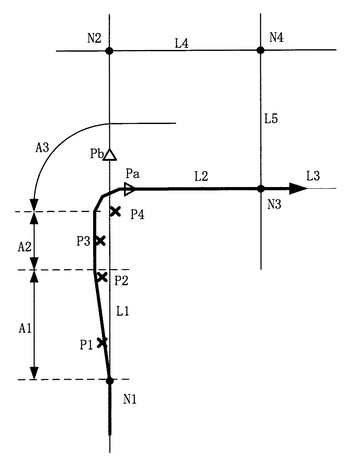
図3は、上記の測位手段選択の概念を説明するための模式図である。ナビゲーション端末装置20が分岐点のノードN1を通過すると、自律航法手段213(または衛星航法手段212)から得られる走行距離に基づいて、走行可能性のある各リンクL1、L2についてそのリンク上における推定位置の位置情報が逐次地点記憶手段219に記憶されてゆく。
【0085】
測位手段選択部214は、以下のようにして衛星航法手段212と自律航法手段213のうち信頼性の高いほうの測位結果を選択する。まず、区間A1においてはリンクL1とリンクL2との間隔が例えば10m以内であり、この間は、衛星航法手段212の測位誤差の範囲内にリンクL1とL2が存在し、衛星航法手段212による測位結果の信頼性は自律航法手段213の測位結果よりも低くなるので、自律航法手段213の測位結果が選択される。
【0086】
区間A2においてはリンクL1とリンクL2の間隔が10m以上になり、この間は、衛星航法手段212測位誤差の範囲内には一方のリンクL1またはL2しか存在しないため、衛星航法手段212の測位結果の信頼性が回復するので、衛星航法手段212の測位結果が選択される。なお、一般には、衛星航法手段212の測位結果によりマッチングされたリンクに対する測位位置のばらつきを監視しナビゲーション端末装置20が走行しているリンクを追跡する処理が行われるが、この間においてはこのような処理を併用してもよい。
【0087】
区間A3においては、リンクL1とリンクL2が立体交差するため、両リンクL1、L2の間隔が再び10m以内となり、この区間A3では区間A1と同様に自律航法手段213による測位結果が選択される。区間A3に入った時ノードN1からのナビゲーション端末装置20の走行距離によるリンクL1上の地点は位置Pa、リンクL2上の地点は位置Pbである。
【0088】
この時にナビゲーション端末装置20の走行方向(方位)を自律航法手段213から取得すると、ナビゲーション端末装置20はリンクL2を走行して右方向にカーブしてリンクL1の上(または下)を通過してゆくから、図中のノードN3の方向に変化する。この方向に該当する(または最も近い方向の)リンクはリンクL2であるから、マッチング処理手段215は、測位地点P4における測位情報をマッチングするリンクとしてリンクL2を選択する。この結果、測位地点P4はリンクL2上の推定位置Paに正しくマッチングされることになる。
【0089】
このようなマッチング処理を行えば、狭い角度でリンクが分岐する分岐点であっても、ナビゲーション端末装置20が走行を継続する間に自車の正確な進行方向(方位)が得られるため、より正確なマッチングを行うことができる。
【0090】
また、ナビゲーション端末装置20が進行する可能性のある複数のリンクについて、各リンク上の走行距離に該当する地点情報を地点記憶手段219に蓄積しているから、万が一マッチングを誤っていても正しい位置への復帰が可能となる。すなわち、現在位置を選択してマッチング処理しても、他の候補リンクについて走行距離情報からリンク上の位置が更新維持される。測位を繰り返すうちに、もし他のリンク上の位置の方が正しいと判断したら、そちらの候補に変更される。
【0091】
この修正までの時間あるいは移動距離(走行距離)は、ナビゲーション端末装置20の走行方向が定まる短い時間あるいは距離の間に行うことができるからリルート処理要求を行う前に正しいリンクへのマッチング修正ができ、無駄なリルート処理を行うようなケースを減少させることもできる。
【0092】
この時、本発明の特徴は、そのリンクを走行してきたと推定される位置へマッチングされる点にある。すなわち、従来のマッチング位置の変更は、推定位置からリンクに垂線を立ててその交点にマッチングしてしまうので、必ずしも正しい走行距離の位置に再マッチングされるわけではなかった。本発明の特徴は、マッチング処理に用いられていないリンクも分岐点からの走行可能な候補リンク上の推定位置を更新し続けることにあるということができる。
【0093】
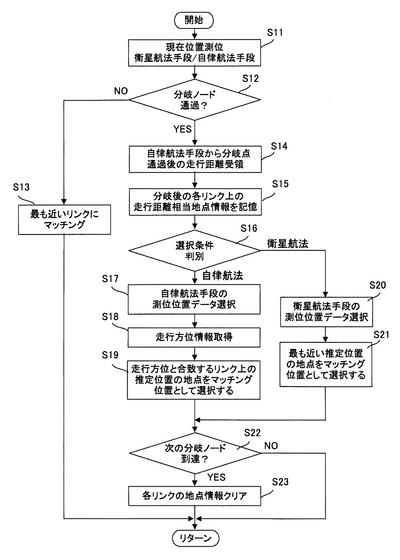
以上のナビゲーションシステム10のマッチング処理の手順を図4のフローチャートを参照して詳細に説明する。ナビゲーション端末装置20はステップS11の処理において衛星航法手段212、自律航法手段213がそれぞれ現在位置を測位する。
【0094】
ステップS12の処理において、マッチング処理手段215は、ナビゲーション端末装置20が分岐ノードを通過したかを判別する。分岐ノードを通過していない場合には、ステップS13の処理において、通常(従来と同様)の投影法によるマッチング処理を行いリターンする。
【0095】
ステップS12の処理において、分岐ノードを通過したと判別された場合には、ステップS14の処理に進み、マッチング処理手段215は自律航法手段213から分岐ノード通過後の走行距離のデータを受領する。そしてステップS15の処理において、分岐後の各リンク毎に走行距離相当の推定位置の地点情報を地点記憶手段219に記憶する。
【0096】
ステップS16の処理において、測位手段選択部214は図3において説明した選択条件に従って、衛星航法手段212、自律航法手段213の何れか測位結果の信頼性の高いほうの測位手段を選択する。衛星航法手段212が選択された場合にはステップS20の処理に進み、自律航法手段213が選択された場合はステップS17の処理に進む。
【0097】
衛星航法手段212が選択された場合、マッチング処理手段215はステップS20の処理において衛星航法手段212の測位した位置情報(測位データ)を選択し、ステップS21の処理において、各リンク上の推定位置の地点のうち、測位した現在位置に最も近い地点をマッチング位置として選択する。そしてステップS22の処理に進む。
【0098】
一方、自律航法手段213が選択された場合、マッチング処理手段215はステップS17の処理において自律航法手段213の測位した位置情報(測位データ)を選択し、ステップS18の処理において、自律航法手段213が備える舵角センサ、ジャイロなどにより得られた走行方位情報を取得する。そして、ステップS19の処理において、走行方位と合致するリンク(または最も近い向きのリンク)を選択し、図3において説明したように当該リンク上の推定位置の地点をマッチング位置として選択する。
【0099】
マッチング処理手段215はステップS22の処理においてナビゲーション端末装置20が次の分岐ノードに到達したかを判別し、次の分岐ノードに到達していなければリターンする。次の分岐ノードに到達したならば、ステップS23の処理において地点記憶手段219に記憶したリンク、各リンク上の地点情報をクリア(リセット)し、リターンする。
【0100】
なお、上記の実施例においては、ナビゲーション端末装置20の走行方位は自律航法手段213により検出する例を説明したが、精度は若干劣るが衛星航法手段212において測位履歴をもとに算出することも可能である。その場合、ステップS21における処理を自律航法手段213が選択されたい場合のステップS18、ステップS19における処理と同様にすることも可能である。
【0101】
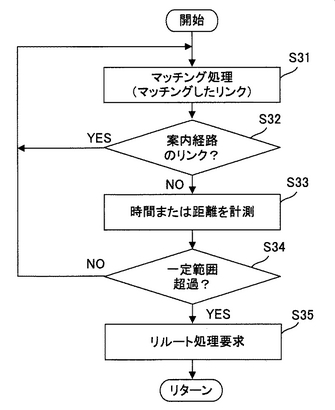
次に、図5のフローチャートを参照してナビゲーション端末装置20がリルート要求を行う手順について説明する。ステップS31の処理においてマッチング処理手段215が図4のフローチャートの処理手順によってマッチング処理すると、ステップS32の処理においてマッチングされたリンクが案内経路のリンクであるか否かが判別される。マッチングされたリンクが案内経路のリンクである場合はステップS31の処理に戻る。
【0102】
マッチングされたリンクが案内経路のリンクでない場合、ナビゲーション端末装置20はステップS33の処理において、時間または走行距離を監視する。そしてステップS34の処理において、時間または走行距離が一定の範囲を超えたか否かが判別される。一定の範囲を超えていなければ、ステップS31の処理に戻り、時間または走行距離の計測を継続する。
【0103】
ステップS34の判別処理において、時間または走行距離が一定の範囲を超えた場合にはステップS35の処理においてリルート処理要求が生成され、配信要求編集手段216で経路探索サーバ30に対するリルート要求情報が編集される。編集されたリルート処理要求はナビゲーション端末装置20から経路探索サーバ30に送信され、経路探索サーバはマッチングされた現在位置を出発地として目的地までの経路を再探索する。
【産業上の利用可能性】
【0104】
本発明は、一般的な車載用ナビゲーションシステム以外にも、車両の位置監視を行うシステム、例えばバスの運行監視システムなどの位置管理システムとして用いることができる。また、車両にGPSによる衛星航法手段と車両の走行距離に基づく自律航法手段のみを搭載し、推定位置算出とその地点を記憶する手段と道路ネットワークデータは通信ネットワークで結んだ経路探索サーバに持つ構成であってもよいし、スタンドアロン型のナビゲーションシステムであってもよい。
【図面の簡単な説明】
【0105】
【図1】本発明の実施例にかかるナビゲーションシステムの構成を示すブロック図である。
【図2】本発明の実施例にかかるマッチング処理方法の概念を示す説明図である。
【図3】衛星航法手段と自律航法手段によるそれぞれの測位出力の選択処理を説明するための模式図である。
【図4】本発明の実施例にかかるマッチング処理の手順を示すフローチャートである。
【図5】リルート処理要求の手順を示すフローチャートである。
【図6】経路探索のための道路ネットワークデータを説明するための模式図である。
【図7】分岐路におけるマッチング処理を説明するための模式図である。
【図8】図7においてマッチングエラーが生じた場合の処理を説明するための模式図である。
【符号の説明】
【0106】
10・・・・ナビゲーションシステム
12・・・・ネットワーク
20・・・・ナビゲーション端末装置
211・・・制御手段
212・・・衛星航法手段
213・・・自律航法手段
214・・・測位手段選択部
215・・・マッチング処理手段
216・・・配信要求編集手段
217・・・通信手段
218・・・配信データ記憶手段
219・・・地点記憶手段
220・・・表示手段
221・・・操作・入力手段
30・・・・経路探索サーバ
311・・・制御手段
312・・・通信手段
313・・・配信データ編集手段
314・・・経路探索手段
315・・・道路ネットワークデータ
316・・・地図データ
【技術分野】
【0001】
本発明は、GPS受信機を用いた衛星航法手段と自律航法手段を測位手段として備え何れかの測位手段で現在位置を測位する、車載用あるいは歩行者用のナビゲーションシステムにおいて、測位手段で測位したナビゲーション装置またはナビゲーション端末装置の現在位置を道路上に補正するためのマッチング処理を正確に行うための技術に関するものであり、特に、分岐ノードを通過後のナビゲーション端末装置の移動距離に基づいて、ナビゲーション端末装置が到達している可能性のある各リンク上のそれぞれの地点情報を記憶し、衛星航法手段と自律航法手段による測位出力のうち信頼度の高い測位手段の測位出力に最も近いリンク上の地点に現在位置をマッチングするようにしたナビゲーションシステム、経路探索サーバ、ナビゲーション端末装置およびプログラムに関するものである。
【背景技術】
【0002】
従来から、地図データ、道路データを用いて、所望の出発地から目的地までの経路を探索して利用者を案内するナビゲーション装置、ナビゲーションシステムが知られており、このようなナビゲーション装置、ナビゲーションシステムとしては自動車に搭載して運転者に経路を案内するカーナビゲーション装置、携帯電話をナビゲーション端末として利用して経路探索サーバに経路探索要求を送り、その結果を受信して経路案内を受ける通信型のナビゲーションシステムなどが実用化されている。
【0003】
特に、通信型のナビゲーションシステムは、携帯電話などの携帯端末をナビゲーション端末として利用したシステムであって、歩行者用のナビゲーションシステムとしても用いられるものである。歩行者用のナビゲーションシステムとしては、交通機関を含めた経路案内機能を付加することが好ましく、徒歩経路の探索と案内に加えて、経路探索サーバに列車時刻データを蓄積し、所望の出発駅から所望の目的駅までの経路(乗車候補列車)を、徒歩経路の探索と案内に加えて案内する機能を有するナビゲーションシステムも存在する。
【0004】
また、航空機、列車、電車、バスなどの交通手段を用いて出発地から目的地までの経路を探索して案内する経路探索システムも知られている。このような経路探索システムは一般的には、ユーザが指定する出発日時、出発地、目的地、到着時刻等の経路探索条件に基づいて、各交通機関の運行データをデータベース化した運行データDB(データベース)を参照して、乗り継ぎを含めて出発地と目的地を結ぶ、利用可能な各交通手段を経路として順次たどり、経路探索条件に合致する案内経路(列車などの交通手段)の候補を1つまたは複数提示するように構成される。経路探索条件としては更に、所要時間、乗り継ぎ回数、運賃などの条件を指定できるようにされているのが一般的である。
【0005】
歩行者ナビゲーションシステムやカーナビゲーションシステムにおける経路探索のための道路ネットワークは、例えば、図6に示すように道路A、B、Cからなる場合、道路A、B、Cの端点、交差点、屈曲点などをノードとし、各ノード間を結ぶ道路を有向性のリンクで表し、ノードデータ(ノードの緯度・経度)、リンクデータ(リンク番号)と各リンクのリンクコスト(リンクの距離またはリンクを走行するのに必要な所要時間)をデータとしたリンクコストデータとで道路ネットワークデータを構成している。すなわち、図6において、○印、◎印がノードを示し、◎印は道路の交差点を示している。各ノード間を結ぶ有向性のリンクを矢印線(実線、点線、2点鎖線)で示している。リンクは、道路の上り、下りそれぞれの方向を向いたリンクが存在するが、図6では図示を簡略化するため矢印の向きのリンクのみを図示している。
【0006】
このような道路ネットワークのデータを経路探索用のデータベースとして経路探索を行う場合、出発地のノードから目的地のノードまで連結されたリンクをたどりそのリンクコストを累積し、累積リンクコストの最少になる経路を探索して案内する。すなわち、図6において出発地をノードAX、目的地をノードCYとして経路探索を行う場合、ノードAXから道路Aを走行して2つ目の交差点で右折して道路Cに入りノードCYにいたるリンクを順次たどりリンクコストを累積し、リンクコストの累積値を最少になる経路を探索して案内する。図6ではノードAXからノードCYに至る他の経路は図示されていないが、実際にはそのような経路が他にも存在するため、ノードAXからノードCYに至る可能な経路を同様にして探索し、それらの経路のうちリンクコストが最少になる経路を最適経路として決定するものである。この手法は、例えば、ダイクストラ法と呼ばれる周知の手法によって行われる。
【0007】
上記のような道路ネットワークは、図6に模式的に示すようにリンクコストが固定であり、経路が定まればその累積リンクコストは一意に定まる静的なネットワークデータであり、データの量も道路ネットワークの量に比例したものになる。交通機関の運行ネットワークデータも同様でありバス路線が設定されている道路ネットワークのデータが路線ネットワークのデータとして使用される。
【0008】
現在、このようなナビゲーションシステムを利用した路線バスの運行管理システムも存在している。このような運行管理システムは、例えば、各路線バスの車両に移動体端末を設置し、現在位置を測位して路線ネットワーク上にマッチング処理することで、各車両の運行位置を把握し、各停留所に車両が到着する予定時刻を表示するサービスを行ったり、道路の渋滞状況を検出したり、車両の配車状況や車両の運行状況の履歴を管理したりするシステムである。
【0009】
一般に、上記のようなナビゲーションシステムにおいて、ナビゲーション端末装置は測位手段としてGPS受信機を搭載している。この測位手段は複数のGPS衛星信号が送信するGPS衛星信号を受信して処理し、現在位置(緯度・経度)を測位している。この方法は衛星航法と言われる。GPS衛星信号はトンネル内や地下では受信することができず、また、ビルが密集した場所ではGPS信号の反射があり、測位精度が悪化する。
【0010】
このため、車載用のナビゲーション装置などでは、加速度センサー、舵角センサー、ジャイロ、車速センサーなどを設けて現在位置を測位する測位手段を併用している。この測位方法は各自律航法と言われる。携帯電話をナビゲーション端末装置とする歩行者用のナビゲーション端末装置においても最近では姿勢検出センサーやジャイロを搭載して自律航法による測位機能を併用させた機器も出現している。
【0011】
GPS受信機を用いた測位手段による現在位置にはGPS衛星信号の処理における演算誤差が含まれることは周知である。一般的にGPSの単独測位精度は一般的に10m強であり、GPS測位手段で測位した位置(緯度・経度)が道路上から外れる場合がある。マッチング処理とはこの誤差による道路からのずれを修正する処理をいう。通常は測位した現在位置(測位した緯度・経度)に最も近い道路を抽出し、現在位置からこの道路に垂線をおろし、道路との交点を現在位置(補正緯度・経度)として補正する処理である。このような処理方法を投影法という。地図上の道路データを使用して上記の処理を行う方法をマップマッチングと言い、経路探索サーバが探索した経路データを使用して上記の処理を行う方法をルートマッチングという。
【0012】
また、自律航法手段により測位した位置情報は、前回測位した自車位置から各種センサーによって計測した移動距離や方位の変化分を累積して現在位置を測位するものであり、測位誤差が累積されてゆく。この場合にもマッチング処理が必要になる。一般的にはGPSを使用した衛星航法による測位では自車の絶対位置が測位できるので、天空が開け、GPS衛星信号の受信状態が良い場所では衛星航法による測位結果が用いられる。
【0013】
マッチング処理を行って自車位置の測位誤差の修正を行うことにより、地図上に自車位置を表示するにあたって、案内経路である道路上に正しく表示することができ、利用者は自車位置が案内経路である道路上を走行していることを確認しながら運転を続けることができる。従って、マッチングのエラーが生じると、案内経路から外れた道路上に自車位置が表示され、利用者は案内経路上を走行しているにもかかわらず、案内経路から外れたものと誤認してしまうことになる。
【0014】
一方、現在位置が案内経路からの逸脱し、そのずれ量が一定の範囲(一定時間経過、あるいは一定の距離)を超えると、当初の経路探索で案内した経路が役に立たなくなるため、その時の現在位置を起点にして目的地までの案内経路を再探索してナビゲーション装置に配信し直すことが必要になる。この再探索の処理をリルート処理と称している。
【0015】
すなわち、マッチング処理は、自社位置を地図上に表示する際に正しく案内経路である道路上を走行しているか否かを利用者に告知する目的と、自社位置が案内経路から一定の範囲以上逸脱した際にリルート処理を起動し、目的地までの案内経路を改めて探索する目的のために行われるものである。
【0016】
マップマッチング処理においては、通常、経路探索のための道路ネットワークデータ(図6参照)を用いて行う。測位した現在位置に対してマッチングすべき道路が接近して複数ある場合には、補正した現在位置が本来の経路(経路探索により探索した出発地から目的地までの最短の案内経路)上でなく、隣接する他の道路上に誤って補正されるエラーが生じる場合がある。特に道路が狭い角度で分岐し、分岐した道路が分岐点以降狭い間隔で平行しているような道路構造の場所では特にマッチング処理でエラーが生じ易い。
【0017】
このようなマッチング処理のエラーが生じると、先に述べたように、正しい案内経路を走行しているにもかかわらず利用者に案内経路から逸脱したという誤った判断をさせてしまうことになる。そして、案内経路からの逸脱の範囲が一定の範囲を超えている場合には、正しい案内経路を走行していても、リルート処理が起動されてしまい、経路探索処理の無駄が発生してしまう。
【0018】
そして、リルート処理の結果、新たな案内経路がナビゲーション端末装置に伝えられると実際には当初の正しい案内経路を走行しているにもかかわらず、他の道路上を出発点とした新たな案内経路に走行道路を変更するか、時間が経過して現在位置が当初の案内経路戻り再度リルートが行われるまで利用車の判断で走行を続けるなど、一時的に案内経路が役に立たない状態に陥る。
【0019】
従ってマッチング処理には正確性が求められ、この精度を向上させるための技術も種々行われている。例えば、下記の特許文献1(特開平8−68656号公報)に開示された「車載用ナビゲーション装置」が知られている。
【0020】
この特許文献1に開示された車載用ナビゲーション装置は、予め、経路探索部により出発地と目的地を結ぶ誘導経路が探索され、誘導経路記憶部に記憶される。GPS受信機の検出車両位置に基づき、マップマッチング部がCD−ROM等のメモリに記憶された車両位置周辺の地図データを用いて車両位置近くの複数のマッチング候補道路を選び出し、その中に誘導経路があるときは該誘導経路の優先度を上げて1つのマッチング候補道路を決定し、該決定したマッチング候補道路上に車両位置を修正するように構成されている。
また、地図画像描画部は車両位置周辺の地図データを用いて修正車両位置を含む地図画像を誘導経路とともにビデオRAMに描画し、更に、地図画像上の修正車両位置に相当する箇所に車両位置マークを描画する。ビデオRAMの画像は映像変換部により読み出され、所定の映像信号に変換されたのちディスプレイ装置に出力されて画面表示されるように構成されている。
【0021】
すなわち、特許文献1に開示された車載用ナビゲーション装置は、誘導経路を含む複数のマッチング候補道路がある場合、誘導経路を優先してマッチング処理することによりマッチング処理の精度を向上させようとしたものである。
【0022】
前述したように、道路が狭い角度で分岐し、分岐した道路が分岐点以降狭い間隔で平行しているような道路構造の場所では特にマッチング処理でエラーが生じ易い。また、幹線道路から側道に分岐する場合なども、幹線道路と側道が非常に接近したままなので、マッチング処理を誤りやすい。例えば、図7に示すように道路が分岐ノードN1において、狭い角度でリンクL1とL2に分岐し分岐後リンクL1とL2とがしばらく平行して走り、リンクL2が立体交差でリンクL1の下または上を通過する道路構造であり、案内経路がL2を進行してノードN3をリンクL3に直進する経路である場合の投影法を用いたマッチング処理について説明する。
【0023】
図8には各時点において測位した現在位置P1〜P4が×印で図示されおり、この現在位置が案内経路であるリンクL2にマッチングされれば問題ないが、リンクL2とリンクL1の間の距離が小さい場合、案内経路でないリンクL1にマッチングされるエラーを生じることがある。すなわち、図8の測位点P4の測位データが得られた瞬間において、測位位置がリンクL2から所定距離以上離れたので、マッチング処理が行われる。ナビゲーション端末装置20はリンクL2を走行しているのであるから、位置Paにマッチング処理されればよいのであるが、測位した現在位置P4に最も近いリンクはリンクL1であるから、投影法により位置Pbにマッチングされてしまう。
【0024】
このようにマックチングエラーが生じると、表示手段に表示される自車位置が案内経路であるリンクL2から外れ、リンクL1上に表示される不都合が生じる。路線バスの車両運行管理システムにおいては各バス車両の位置を正確に把握し運行状況を正確に管理する必要があり、マッチング精度を向上させることが望まれている。
【0025】
また、このエラーが一定の範囲(時間または走行距離)を超過すると、経路のリルート(再探索要求)が発生する。リルートの結果、新たに探索された経路は、リンクL1を直進してノードN2に至り、ノードN2で右折してリンクL4をノードN4まで走行し、ノードN4を右折してリンクL5をノードN3まで走行し、ノードN3左折してもとの案内経路であるリンクL3に至る経路である。この場合、現在位置を別の道路にマッチングしてしまったので、リルート処理した結果誤ったガイダンス音声を発生してしまうことになり、利用者を混乱させるので、このような不具合を防止することが好ましい。
【0026】
また、実際の自車位置が当初の案内経路であるリンクL2にあるので、このリルート処理は無駄な処理であり、利用者を混乱させるという不都合を生じる。この観点からもマッチング精度を向上させることが望まれている。
【0027】
このような問題点を解決する技術として、下記の特許文献2(特開2004−271293号公報)に開示された「ナビゲーション装置」が知られている。この特許文献2に開示されたナビゲーション装置は、表示部と、現在位置表示情報を記憶する履歴位置情報D
Bと、現在位置情報をGPSから獲得する位置情報受信部と、現在位置情報を解析して現在位置を算出する位置情報解析部と、地図情報を記憶するMAPDBと、車両の車速パルス値と進行方向を計測する計測部と、車速パルス及び進行方向と、直前の現在位置表示情報とから予測移動距離及び予測移動方向を算出し、現在位置と地図情報とに基づいて、測位位置情報を算出する中央処理部と、算出された予測移動距離、予測移動方向及び測位位置情報を記憶する位置情報DBと、許容範囲の閾値テーブルを記憶する許容テーブルDBとを備えて構成されている。
【0028】
そして、このナビゲーション装置においては、中央処理手段は、位置情報記憶手段に記憶されている予測移動距離及び予測移動方向から車両の予測移動位置を算出し、当該予測移動位置と許容テーブル記憶手段に記憶されている閾値テーブルに基づいて、予測位置範囲を決定し、位置情報記憶手段に記憶されている測位位置情報と予測位置範囲を比較して、測位位置情報が予測位置範囲内であれば、測位位置情報を現在位置表示情報とし、測位位置情報が予測位置範囲外であれば、予測移動位置を現在位置表示情報とするようにしている。
【0029】
また、本願の出願人は、路線バスの運行管理におけるマッチング処理の精度を向上させる目的で、既に特願2005−013957号の発明についての特許出願を行っている。
【0030】
この特願2005−013957号(以下、「先願1」という。)に開示された発明においては、路線バスの車両に設置される移動体端末装置と運行管理サーバとがネットワークを介して接続されるように構成されている。そして、移動体端末装置は、衛星航法に基づき位置を検出する位置検出手段と、自律航法手段と、通信手段と、マッチング手段と、路線ネットワークデータを記憶した路線データ記憶手段と、を備え、路線ネットワークデータは、所定のバス路線のネットワークデータのみで構成され、マッチング手段は、前記位置検出手段が検出した現在位置データを路線ネットワークデータにマッチング処理し、マッチング処理した現在位置データを、通信手段を介して運行管理サーバに送信するように構成されたものである。
【0031】
また、先願1においては、駅前のバスターミナルなど、周囲にビルが密集しGPS測位におけるマルチパスの影響からマッチングエラーが生じ易いエリアにおいては、GPS測位手段を使用せず、自律航法を使用した測位手段を用いて測位、マッチング処理するように構成されている。
【0032】
【特許文献1】特開平8−68656号公報(図1、図5)
【特許文献2】特開2004−271293号公報(図1、図4)
【発明の開示】
【発明が解決しようとする課題】
【0033】
前述したように、図7、図8に示すように道路が狭い角度で分岐し、分岐した道路が分岐点以降狭い間隔で平行しているような道路構造の場所では特にマッチング処理でエラーが生じ易い。
【0034】
しかしながら、上記特許文献1に開示された車載用ナビゲーション装置においては、誘導経路を優先してマッチング処理するものであるが、これは、車両が誘導経路に従って正しく走行しているという前提が満たされる限りにおいては、マッチングの精度を高めることができるが、車両が誘導経路から外れて走行している場合には、誤ったマッチングを行ってしまうという問題点があった。
【0035】
また、上記特許文献2に開示された技術では、一定の閾値範囲を設定しておき、GPSにより測位した現在位置がその閾値範囲内にあればその測位位置を現在位置とするものであり、道路が狭い角度で分岐し、分岐した道路が分岐点以降、狭い間隔で平行しているような道路構造の場所では正確にマッチングを行える保証がないという問題点があった。
【0036】
また、先願1に開示した発明は、バス路線のように設定された一定の経路を走行するバス車両などのマッチング処理においては効果を発揮するが、一般の車両には適用することができないという問題点があった。
【0037】
本願の発明者は上記の問題点を解消すべく種々検討を重ねた結果、分岐ノードを通過後のナビゲーション端末装置の移動距離に基づいて、ナビゲーション端末装置が到達している可能性のある各リンク上のそれぞれの地点情報を記憶し、衛星航法手段と自律航法手段による測位出力のうち信頼度の高い測位手段の測位出力に最も近い地点または進行方向に合致するリンク上の地点に現在位置をマッチングすればマッチング処理の精度を向上させ得ることを想到して本発明を完成するに至ったものである。
【0038】
すなわち、本発明は、上記の問題点を解消することを課題とし、測位手段で測位したナビゲーション装置またはナビゲーション端末装置の現在位置を道路上に補正するためのマッチング処理を正確に行うことができるナビゲーションシステム、経路探索サーバ、ナビゲーション端末装置およびプログラムを提供することを目的とするものである。
【課題を解決するための手段】
【0039】
前記課題を解決するために、本願の請求項1にかかる発明は、
衛星航法手段と自律航法手段と、衛星航法手段または自律航法手段により測位した移動体の現在位置をノードとノード間を結ぶリンクにより表現されたネットワークデータにマッチングするマッチング処理手段を有するナビゲーションシステムであって、
前記ナビゲーションシステムは、地点記憶手段と、測位手段選択部と、を備え、
前記マッチング処理手段は、前記自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶し、
前記測位手段選択部は、所定の選択条件に従って前記衛星航法手段または自律航法手段の測位出力の何れかを選択し、
前記マッチング処理手段は、前記測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、前記地点記憶手段を参照し、当該進行方向に合致するリンク上の前記推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、前記地点記憶手段を参照し、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択することによりマッチングすることを特徴とする。
【0040】
また、本願の請求項2にかかる発明は、請求項1の発明にかかるナビゲーションシステムにおいて、前記地点記憶手段に記憶される推定位置の地点情報は分岐ノード毎にリセットされることを特徴とする
【0041】
また、本願の請求項3にかかる発明は、請求項1または請求項2の発明にかかるナビゲーションシステムにおいて、前記マッチング処理手段は、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しないようにしたことを特徴とする。
【0042】
本願の請求項4にかかる発明は、
衛星航法手段と自律航法手段と、衛星航法手段または自律航法手段により測位した移動体の現在位置をノードとノード間を結ぶリンクにより表現されたネットワークデータにマッチングするマッチング処理手段と、地点記憶手段と、測位手段選択部と、を有するナビゲーションシステムにおけるマッチング方法であって、
前記マッチング処理手段が、前記自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶するステップと、
前記測位手段選択部が、所定の選択条件に従って前記衛星航法手段または自律航法手段の測位出力の何れかを選択するステップと、
前記マッチング処理手段が、前記測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、前記地点記憶手段を参照し、当該進行方向に合致するリンク上の前記推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、前記地点記憶手段を参照し、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択するステップと、
からなることを特徴とする。
【0043】
また、本願の請求項5にかかる発明は、請求項4の発明にかかるマッチング方法において、前記推定位置の地点情報を地点記憶手段に記憶するステップは、分岐ノード毎にリセットする処理を含むことを特徴とする。
【0044】
また、本願の請求項6にかかる発明は、請求項4または請求項5の発明にかかるマッチング方法において、前記推定位置の地点情報を地点記憶手段に記憶するステップは、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しない処理を含むことを特徴とする。
【0045】
本願の請求項7にかかる発明は、
衛星航法手段と自律航法手段を備えたナビゲーション端末装置とネットワークを介して接続され、前記衛星航法手段または自律航法手段により測位した移動体の現在位置をノードとノード間を結ぶリンクにより表現されたネットワークデータにマッチングするマッチング処理手段を有する経路探索サーバからなるナビゲーションシステムを構成する経路探索サーバであって、
前記経路探索サーバは、更に、地点記憶手段と、測位手段選択部と、を備え、
前記マッチング処理手段は、前記自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶し、
前記測位手段選択部は、所定の選択条件に従って前記衛星航法手段または自律航法手段の測位出力の何れかを選択し、
前記マッチング処理手段は、前記測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、前記地点記憶手段を参照し、当該進行方向に合致するリンク上の前記推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、前記地点記憶手段を参照し、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択することによりマッチングすることを特徴とする。
【0046】
また、本願の請求項8にかかる発明は、請求項7の発明にかかる経路探索サーバにおいて、前記地点記憶手段に記憶される推定位置の地点情報は分岐ノード毎にリセットされることを特徴とする。
【0047】
また、本願の請求項9にかかる発明は、請求項7または請求項8の発明にかかる経路探索サーバにおいて、前記マッチング処理手段は、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しないようにしたことを特徴とする。
【0048】
本願の請求項10にかかる発明は、
衛星航法手段と自律航法手段を備え、前記衛星航法手段または自律航法手段により測位した移動体の現在位置をノードとノード間を結ぶリンクにより表現されたネットワークデータにマッチングするマッチング処理手段を有するナビゲーション端末装置がネットワークを介して経路探索サーバに接続されるナビゲーションシステムを構成する前記ナビゲーション端末装置であって、
前記ナビゲーション端末装置は、更に、地点記憶手段と、測位手段選択部と、を備え、
前記マッチング処理手段は、前記自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶し、
前記測位手段選択部は、所定の選択条件に従って前記衛星航法手段または自律航法手段の測位出力の何れかを選択し、
前記マッチング処理手段は、前記測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、前記地点記憶手段を参照し、当該進行方向に合致するリンク上の前記推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、前記地点記憶手段を参照し、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択することによりマッチングすることを特徴とする。
【0049】
また、本願の請求項11にかかる発明は、請求項10の発明にかかるナビゲーション端末装置において、前記地点記憶手段に記憶される推定位置の地点情報は分岐ノード毎にリセットされることを特徴とする。
【0050】
また、本願の請求項12にかかる発明は、請求項10または請求項11の発明にかかるナビゲーション端末装置において、前記マッチング処理手段は、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しないようにしたことを特徴とする。
【発明の効果】
【0051】
請求項1にかかる発明においては、自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶し、マッチング処理手段は、測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、進行方向に合致するリンク上の推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択する。
従って、狭い角度でリンクが分岐する分岐点であっても、ナビゲーション端末装置が走行を継続する間にナビゲーション端末装置での正確な進行方向(方位)が得られるため、より正確なマッチングを行うことができるようになる。
【0052】
また、ナビゲーション端末装置が進行する可能性のある複数のリンクについて、各リンク上の走行距離に該当する地点情報を地点記憶手段に蓄積しているから、万が一マッチングを誤っていても正しい位置への復帰が可能となる。すなわち、ある地点を選択してマッチング処理しても、他の候補リンクについて走行距離情報からリンク上の地点が更新維持されるから、測位を繰り返すうちに、もし他のリンク上の位置の方が正しいと判断したら、そちらの候補にマッチング位置を修正することができるようになる。
【0053】
この修正までの時間あるいは移動距離(走行距離)は、ナビゲーション端末装置の走行方向が定まる短い時間あるいは距離の間に行うことができるからリルート処理要求を行う前に正しいリンクへのマッチング修正ができ、無駄なリルート処理を行うようなケースを減少させることもできるようになる。
【0054】
また、請求項2にかかる発明においては、請求項1にかかるナビゲーションシステムにおいて、前記地点記憶手段に記憶される推定位置の地点情報は分岐ノード毎にリセットされる。従って、分岐ノード毎に精度の高いマッチング処理を行うことができるようになる。また、地点記憶手段に記憶する候補リンクの地点情報が一方的に増えてしまうこともなく、候補リンク追跡の処理負荷を軽くすることができるようになる。
【0055】
また、請求項3にかかる発明においては、請求項1または請求項2にかかるナビゲーションシステムにおいて、前記マッチング処理手段は、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しないようにされている。従って、地点記憶手段に記憶する候補リンクの地点情報の量を抑制することがなく、候補リンク追跡の処理負荷を軽くすることができるようになる。
【0056】
請求項4にかかる発明においては、自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶し、マッチング処理手段は、測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、進行方向に合致するリンク上の推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択する。
従って、狭い角度でリンクが分岐する分岐点であっても、ナビゲーション端末装置が走行を継続する間にナビゲーション端末装置での正確な進行方向(方位)が得られるため、より正確なマッチングを行うことができるようになる。
【0057】
また、請求項5にかかる発明においては、請求項4にかかるマッチング方法において、前記地点記憶手段に記憶される推定位置の地点情報は分岐ノード毎にリセットされる。従って、分岐ノード毎に精度の高いマッチング処理を行うことができるようになる。また、地点記憶手段に記憶する候補リンクの地点情報が一方的に増えてしまうこともなく、候補リンク追跡の処理負荷を軽くすることができるようになる。
【0058】
また、請求項6にかかる発明においては、請求項4または請求項5にかかるマッチング方法において、前記マッチング処理手段は、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しないようにされている。従って、地点記憶手段に記憶する候補リンクの地点情報の量を抑制することがなく、候補リンク追跡の処理負荷を軽くすることができるようになる。
【0059】
請求項7ないし請求項9にかかる発明においては、それぞれ請求項1ないし請求項3にかかるナビゲーションシステムを構成する経路探索サーバを提供することができるようになる。
【0060】
請求項10ないし請求項12にかかる発明においては、それぞれ請求項1ないし請求項3にかかるナビゲーションシステムを構成するナビゲーション端末装置を提供することができるようになる。
【発明を実施するための最良の形態】
【0061】
以下、本発明の具体例を実施例及び図面を用いて詳細に説明する。図1は本発明の実施例にかかるナビゲーションシステムの構成を示すブロック図である。なお、本実施例は車載用のナビゲーション端末装置と経路探索サーバを備えた通信型のナビゲーションシステムを例にとり説明するが、本発明は、通信型のナビゲーションのナビゲーションシステムに限ることなく、スタンドアロン型のナビゲーションシステムであってもよい。
【実施例】
【0062】
本発明の実施例にかかるナビゲーションシステム10は図1に示すように、ネットワーク12を介して接続される車載用のナビゲーション端末装置20と経路探索サーバ30とを備えて構成されている。経路探索サーバ30は、ナビゲーション端末装置20から、出発地、目的地などの経路探索条件に基づいて最適な経路を探索して案内経路のデータや地図データを配信する。ナビゲーション端末装置20は地図データ、案内経路のデータと、ナビゲーション端末装置20現在位置(自車位置)を重ね合わせて表示手段に表示し、目的地までの経路のガイダンスを受けるように構成されている。
【0063】
経路探索サーバ30は、制御手段311、通信手段312、配信データ編集手段313、経路探索手段314、経路探索用の道路ネットワークデータ35を蓄積したデータベースと地図データ316を蓄積したデータベースを備えている。ナビゲーションシステム10が歩行者用のナビゲーション機能を備える場合には、徒歩専用の道路を探索するための歩行者ネットワークデータや交通機関を用いた経路探索のための交通ネットワークデータを蓄積したデータベース(図示せず)を備える。道路ネットワークデータ315は図6を参照して説明したように構成されている。
【0064】
制御手段311は、図示してはいないがRAM、ROM、プロセッサを有するマイクロプロセッサであり、ROMに格納された制御プログラムにより各部の動作を制御する。通信手段312は、ネットワーク12を介してナビゲーション端末装置20と通信するためのインターフェースである。配信データ編集手段313は、経路探索の結果得た最適な案内経路のデータや地図データをナビゲーション端末装置20に配信するためのデータに編集するためのものである。
【0065】
経路探索手段314はマルチモーダルな経路探索エンジンであって、ナビゲーション端末装置20から送信された検索条件(出発地または現在地、目的地、移動手段、出発時刻など)に基づいて道路ネットワークデータ315を参照して出発地または現在地から目的地までの最適な経路(距離や所要時間が最小になる経路)を探索する。探索された案内経路は配信データ編集手段313で編集されナビゲーション端末装置20に配信される。経路探索手段314は自動車と徒歩、徒歩と交通機関を併用した経路探索機能を有する場合、経路探索手段314はマルチモーダルな経路探索エンジンを用いる。このような経路探索エンジンは例えば特開2000−258184号公報などに開示されている。経路の探索方法としては周知のダイクストラ法と呼ばれる手法が適用される。
【0066】
また、経路探索サーバ30はナビゲーション端末装置20に必要な地図データを配信する。地図データ316は、緯度、経度によって所定の大きさに分割された単位地図からなり、通常、ナビゲーション端末装置20の現在位置を中心に上下、左右の9枚分の地図がナビゲーション端末装置20に配信される。ナビゲーション端末装置20が移動し、地図データが不足すると、ナビゲーション端末装置20は不足分の単位地図の配信を経路探索サーバ30に要求し、所用の単位地図の配信を受ける。
【0067】
ナビゲーション端末装置20は経路探索サーバ30から地図データ、案内経路のデータの配信を受けると、地図、案内経路、自車現在位置を表示し、利用者は目的地までの経路の案内を受けることができる。
【0068】
ナビゲーション端末装置20は、図1に示すように、制御手段211、衛星航法手段212、自律航法手段213、測位手段選択部214、マッチング処理手段215、配信要求編集手段216、通信手段217、配信データ記憶手段218、地点記憶手段219、表示手段220、操作・入力手段221を備えて構成されている。
【0069】
制御手段211は、図示してはいないがRAM、ROMを有するマイクロプロセッサ(CPU)を備えて構成され、ROMに格納された制御プログラムにより各部の動作を制御する。操作・入力手段221は、数字キーやアルファベットキー、その他の機能キー、選択キー、スクロールキーなどからなる操作・入力のためのものであり、出力手段である表示手段221に表示されるメニュー画面から所望のメニューを選択し、あるいは、キーを操作して種々の入力操作を行うものである。従って、表示手段220は操作・入力手段221の一部としても機能する。通信手段217は、ネットワーク12を介して経路探索サーバ30と通信するためのインターフェースである。
【0070】
配信要求編集手段216は、操作・入力手段221を使用して入力された出発地、目的地、あるいは、衛星航法手段212または自律航法手段213で測位したナビゲーション端末装置20の現在位置を出発地として、これらの情報を経路探索条件とした経路探索要求を編集するものである。経路探索条件には移動手段(自動車、徒歩、交通機関など)、出発時刻や到着時刻などを設定することもできる。また、配信要求編集手段216は、ナビゲーション端末装置20の移動に伴い、経路探索サーバ30から配信を受けている地図データに不足が生じた場合に不足分の地図データを要求する地図データ要求を編集し、経路探索サーバ30に送信する。
【0071】
配信データ記憶手段218は、経路探索サーバ30から配信された経路探索結果である案内経路データ、地図データ、ガイダンスなどを記憶するものであり、これらのデータは必要に応じて配信データ記憶手段218から読み出され、表示手段220に表示される。一般的には、ナビゲーション端末装置20の現在位置を含む一定の縮尺、一定の範囲の地図に、案内経路と、ナビゲーション端末装置20の現在位置を示すマークを重ね合わせて該現在位置マークが表示画面の中心になるように表示する。また、経路探索サーバ30から配信される案内経路データに音声ガイド(例えば、「この先、300m交差点です。左折して下さい」などの音声メッセージ)のデータが付加されている場合は、スピーカを介して音声メッセージを再生出力してユーザをガイドする。
【0072】
衛星航法手段212はGPS受信機を備えGPS衛星信号を受信処理してナビゲーション端末装置20の現在位置を測位する第1の測位手段である。自律航法手段213は加速度センサー、舵角センサー、ジャイロ、車速センサーなどを備え、ナビゲーション端末装置20の現在位置を測位する第2の測位手段である。先に述べたように、一般的にはGPSを使用した衛星航法による測位では自車の絶対位置が測位できるので、天空が開け、GPS衛星信号の受信状態が良い場所では衛星航法手段212による測位結果が優先されて用いられる。
【0073】
トンネル内などGPS衛星信号を受信できない場所では当然に自律航法手段213による測位結果が用いられる。またGPSによる測位結果には10m程度の測位誤差が含まれるため、10mの範囲内に案内経路以外のリンクが存在する場所では、自律航法手段213による測位結果のほうが衛星航法手段212による測位結果より信頼度が高くなるので自律航法手段213による測位結果が優先されて用いられる。マルチパスの影響により衛星航法手段212による測位結果の誤差が大きくなる場所においても同様である。測位手段選択部214は以上のような条件を判別して衛星航法手段212と自律航法手段213の何れかの測位結果を選択する。なお、自律航法手段213による測位結果は、測位手段選択部214の選択のいかんにかかわらず保持され、自車の移動距離や方位等の算出結果も保持される。
【0074】
マッチング処理手段215は、衛星航法手段212、自律航法手段213等により測位した現在位置を道路上に補正する処理を行うものである。従来のマッチング処理は、前述したように、測位された現在位置に最も近い道路を選択し、この道路に垂線を下ろしてその交点を現在位置として補正する投影法が用いられる。本発明ではこの投影法をとらず、以下に詳述する処理によりマッチングを行う。
【0075】
すなわち、マッチング処理手段215は、分岐ノードを通過後のナビゲーション端末装置20の移動距離(走行距離)に基づいて、ナビゲーション端末装置20が到達している可能性のある各リンク上のそれぞれの地点情報を地点記憶手段219に記憶し、測位手段選択部214が衛星航法手段212と自律航法手段213による測位出力のうち信頼度の高い測位手段を選択し、マッチング処理手段215は、地点記憶手段219に記憶された地点情報を参照して、測位手段選択部214で選択された測位手段が測位した現在位置に最も近い地点を選択してこの地点をマッチング位置とする処理を行うものである。測位手段選択部214により自律航法手段213が選択された場合はナビゲーション端末装置20の走行方位が得られるので、当該走行方位に合致した(最も近い)リンク上の地点を選択してその地点をマッチング位置として選択する。衛星航法手段212が選択された場合は、衛星航法手段212が測位した測位位置(現在位置)に最も近い推定位置の地点をマッチング位置として選択すればよい。
【0076】
以上のマッチング処理の概念を図2に示す模式図を参照して説明する。ナビゲーション端末装置20が交差点や分岐点のノードNを通過した後のマッチング処理において、自車がとり得るリンクは、L1〜L3の3方向である。マッチング処理手段215は、自律航法手段213または衛星航法手段212によりノードN通過後の移動距離(走行距離)に基づいて、上記可能性のある全てのリンクL1〜L3上の到達推定位置を地点情報(P11〜P13)として地点記憶手段219に記憶する。この時の測位位置はP1であったとする。
【0077】
ノードN通過後のナビゲーション端末装置20の移動距離(走行距離)は、衛星航法手段212(GPS)による測位履歴から算出することもできるが、誤差が累積され、自律航法手段213による距離計測よりも誤差が大きくなる場合があるので、自律航法手段213による移動距離を用いることが好ましい。
【0078】
さらにナビゲーション端末装置20が走行し、測位位置がP2になった場合も同様の処理を行い、走行距離に基づいて全てのリンクL1〜L3上の到達推定位置を地点情報(P21〜P23)として地点記憶手段219に記憶する。以下、測位位置を得る都度、同様に各リンクL1〜L3上の地点情報を逐次記憶してゆく。
【0079】
次に、マッチング処理手段215は、測位位置P1、P2のデータあるいは自律航法手段213に備える舵角センサの出力から、ナビゲーション端末装置20の進行方向(方位)を算出し、この方位に合致する(あるいは最も近い方位を持つ)リンクを判別する。図2の場合、リンクL2が進行方向に最も近い方位のリンクであり、そのリンク上の地点、すなわち、図2の場合、位置P21(方位がP2到達時点まで決定できなかった場合は位置P22)をマッチング位置として選択する。
【0080】
測位手段選択部214により衛星航法手段212が選択された場合は、自律航法手段213が選択された場合と同様に衛星航法手段212(GPS)による測位履歴から進行方向(方位)を算出して、当該進行方向に最も近い方位を持つリンクを特定してマッチング位置を選択することもできるが、誤差が大きい場合は、衛星航法手段212が測位した測位位置(現在位置)に最も近い推定位置の地点をマッチング位置として選択すればよい。
【0081】
ナビゲーション端末装置20が何れかのリンクL1〜L3を走行し、次の分岐ノードに到達したら、地点記憶手段219に記憶した地点情報はリセットされ、次の分岐ノードからの各リンクについて前記と同様のマッチング処理が実行される。このように、新たな分岐に到達したときに各候補リンクの地点情報をリセットするように構成すれば、追跡する候補リンクの地点情報が一方的に増えてしまうこともない。あるいは所定地を越えた候補リンクの地点情報は追跡しない(維持しない)ようにして、候補リンク追跡の負荷を軽くすることもできる。
【0082】
なお、衛星航法手段212と自律航法手段213の何れが測位した位置情報を用いるかは、測位手段選択部214が両者の信頼度が高い方を判別して決定する。前述したように、衛星航法手段212の測位結果には10m程度の誤差があることから、半径10mの範囲内に案内経路のリンクと隣接他の道路のリンクが存在するかを判別し、この範囲内に他の道路のリンクが存在する場合は自律航法手段213による測位結果を用いる。なお、余裕をもって判別するためにはこの判別範囲を10m以内でなく20m以内の範囲とすればよい。
【0083】
トンネルの中で分岐するような場合も、衛星航法手段212(GPS)が使用できないので、自律航法手段213を選択する。マルチパスの影響が大きくなるエリアが特定されていれば、当該エリア内でも同様に自律航法手段213が選択される。なお、衛星航法手段212(GPS)の信頼度が高いときに、GPSによる測位位置から離れすぎたリンクは候補リンクとせず、地点情報の維持(記憶)を行わないようにして、制御手段211の処理負荷を軽くしても良い(例えばGPSの信頼度が十分あってGPSによる測位位置から200m以上離れた候補リンクは対象としないなどの判別を行う)。
【0084】
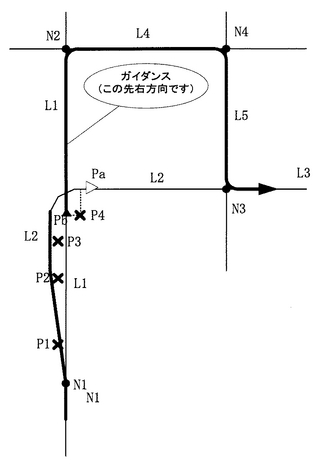
図3は、上記の測位手段選択の概念を説明するための模式図である。ナビゲーション端末装置20が分岐点のノードN1を通過すると、自律航法手段213(または衛星航法手段212)から得られる走行距離に基づいて、走行可能性のある各リンクL1、L2についてそのリンク上における推定位置の位置情報が逐次地点記憶手段219に記憶されてゆく。
【0085】
測位手段選択部214は、以下のようにして衛星航法手段212と自律航法手段213のうち信頼性の高いほうの測位結果を選択する。まず、区間A1においてはリンクL1とリンクL2との間隔が例えば10m以内であり、この間は、衛星航法手段212の測位誤差の範囲内にリンクL1とL2が存在し、衛星航法手段212による測位結果の信頼性は自律航法手段213の測位結果よりも低くなるので、自律航法手段213の測位結果が選択される。
【0086】
区間A2においてはリンクL1とリンクL2の間隔が10m以上になり、この間は、衛星航法手段212測位誤差の範囲内には一方のリンクL1またはL2しか存在しないため、衛星航法手段212の測位結果の信頼性が回復するので、衛星航法手段212の測位結果が選択される。なお、一般には、衛星航法手段212の測位結果によりマッチングされたリンクに対する測位位置のばらつきを監視しナビゲーション端末装置20が走行しているリンクを追跡する処理が行われるが、この間においてはこのような処理を併用してもよい。
【0087】
区間A3においては、リンクL1とリンクL2が立体交差するため、両リンクL1、L2の間隔が再び10m以内となり、この区間A3では区間A1と同様に自律航法手段213による測位結果が選択される。区間A3に入った時ノードN1からのナビゲーション端末装置20の走行距離によるリンクL1上の地点は位置Pa、リンクL2上の地点は位置Pbである。
【0088】
この時にナビゲーション端末装置20の走行方向(方位)を自律航法手段213から取得すると、ナビゲーション端末装置20はリンクL2を走行して右方向にカーブしてリンクL1の上(または下)を通過してゆくから、図中のノードN3の方向に変化する。この方向に該当する(または最も近い方向の)リンクはリンクL2であるから、マッチング処理手段215は、測位地点P4における測位情報をマッチングするリンクとしてリンクL2を選択する。この結果、測位地点P4はリンクL2上の推定位置Paに正しくマッチングされることになる。
【0089】
このようなマッチング処理を行えば、狭い角度でリンクが分岐する分岐点であっても、ナビゲーション端末装置20が走行を継続する間に自車の正確な進行方向(方位)が得られるため、より正確なマッチングを行うことができる。
【0090】
また、ナビゲーション端末装置20が進行する可能性のある複数のリンクについて、各リンク上の走行距離に該当する地点情報を地点記憶手段219に蓄積しているから、万が一マッチングを誤っていても正しい位置への復帰が可能となる。すなわち、現在位置を選択してマッチング処理しても、他の候補リンクについて走行距離情報からリンク上の位置が更新維持される。測位を繰り返すうちに、もし他のリンク上の位置の方が正しいと判断したら、そちらの候補に変更される。
【0091】
この修正までの時間あるいは移動距離(走行距離)は、ナビゲーション端末装置20の走行方向が定まる短い時間あるいは距離の間に行うことができるからリルート処理要求を行う前に正しいリンクへのマッチング修正ができ、無駄なリルート処理を行うようなケースを減少させることもできる。
【0092】
この時、本発明の特徴は、そのリンクを走行してきたと推定される位置へマッチングされる点にある。すなわち、従来のマッチング位置の変更は、推定位置からリンクに垂線を立ててその交点にマッチングしてしまうので、必ずしも正しい走行距離の位置に再マッチングされるわけではなかった。本発明の特徴は、マッチング処理に用いられていないリンクも分岐点からの走行可能な候補リンク上の推定位置を更新し続けることにあるということができる。
【0093】
以上のナビゲーションシステム10のマッチング処理の手順を図4のフローチャートを参照して詳細に説明する。ナビゲーション端末装置20はステップS11の処理において衛星航法手段212、自律航法手段213がそれぞれ現在位置を測位する。
【0094】
ステップS12の処理において、マッチング処理手段215は、ナビゲーション端末装置20が分岐ノードを通過したかを判別する。分岐ノードを通過していない場合には、ステップS13の処理において、通常(従来と同様)の投影法によるマッチング処理を行いリターンする。
【0095】
ステップS12の処理において、分岐ノードを通過したと判別された場合には、ステップS14の処理に進み、マッチング処理手段215は自律航法手段213から分岐ノード通過後の走行距離のデータを受領する。そしてステップS15の処理において、分岐後の各リンク毎に走行距離相当の推定位置の地点情報を地点記憶手段219に記憶する。
【0096】
ステップS16の処理において、測位手段選択部214は図3において説明した選択条件に従って、衛星航法手段212、自律航法手段213の何れか測位結果の信頼性の高いほうの測位手段を選択する。衛星航法手段212が選択された場合にはステップS20の処理に進み、自律航法手段213が選択された場合はステップS17の処理に進む。
【0097】
衛星航法手段212が選択された場合、マッチング処理手段215はステップS20の処理において衛星航法手段212の測位した位置情報(測位データ)を選択し、ステップS21の処理において、各リンク上の推定位置の地点のうち、測位した現在位置に最も近い地点をマッチング位置として選択する。そしてステップS22の処理に進む。
【0098】
一方、自律航法手段213が選択された場合、マッチング処理手段215はステップS17の処理において自律航法手段213の測位した位置情報(測位データ)を選択し、ステップS18の処理において、自律航法手段213が備える舵角センサ、ジャイロなどにより得られた走行方位情報を取得する。そして、ステップS19の処理において、走行方位と合致するリンク(または最も近い向きのリンク)を選択し、図3において説明したように当該リンク上の推定位置の地点をマッチング位置として選択する。
【0099】
マッチング処理手段215はステップS22の処理においてナビゲーション端末装置20が次の分岐ノードに到達したかを判別し、次の分岐ノードに到達していなければリターンする。次の分岐ノードに到達したならば、ステップS23の処理において地点記憶手段219に記憶したリンク、各リンク上の地点情報をクリア(リセット)し、リターンする。
【0100】
なお、上記の実施例においては、ナビゲーション端末装置20の走行方位は自律航法手段213により検出する例を説明したが、精度は若干劣るが衛星航法手段212において測位履歴をもとに算出することも可能である。その場合、ステップS21における処理を自律航法手段213が選択されたい場合のステップS18、ステップS19における処理と同様にすることも可能である。
【0101】
次に、図5のフローチャートを参照してナビゲーション端末装置20がリルート要求を行う手順について説明する。ステップS31の処理においてマッチング処理手段215が図4のフローチャートの処理手順によってマッチング処理すると、ステップS32の処理においてマッチングされたリンクが案内経路のリンクであるか否かが判別される。マッチングされたリンクが案内経路のリンクである場合はステップS31の処理に戻る。
【0102】
マッチングされたリンクが案内経路のリンクでない場合、ナビゲーション端末装置20はステップS33の処理において、時間または走行距離を監視する。そしてステップS34の処理において、時間または走行距離が一定の範囲を超えたか否かが判別される。一定の範囲を超えていなければ、ステップS31の処理に戻り、時間または走行距離の計測を継続する。
【0103】
ステップS34の判別処理において、時間または走行距離が一定の範囲を超えた場合にはステップS35の処理においてリルート処理要求が生成され、配信要求編集手段216で経路探索サーバ30に対するリルート要求情報が編集される。編集されたリルート処理要求はナビゲーション端末装置20から経路探索サーバ30に送信され、経路探索サーバはマッチングされた現在位置を出発地として目的地までの経路を再探索する。
【産業上の利用可能性】
【0104】
本発明は、一般的な車載用ナビゲーションシステム以外にも、車両の位置監視を行うシステム、例えばバスの運行監視システムなどの位置管理システムとして用いることができる。また、車両にGPSによる衛星航法手段と車両の走行距離に基づく自律航法手段のみを搭載し、推定位置算出とその地点を記憶する手段と道路ネットワークデータは通信ネットワークで結んだ経路探索サーバに持つ構成であってもよいし、スタンドアロン型のナビゲーションシステムであってもよい。
【図面の簡単な説明】
【0105】
【図1】本発明の実施例にかかるナビゲーションシステムの構成を示すブロック図である。
【図2】本発明の実施例にかかるマッチング処理方法の概念を示す説明図である。
【図3】衛星航法手段と自律航法手段によるそれぞれの測位出力の選択処理を説明するための模式図である。
【図4】本発明の実施例にかかるマッチング処理の手順を示すフローチャートである。
【図5】リルート処理要求の手順を示すフローチャートである。
【図6】経路探索のための道路ネットワークデータを説明するための模式図である。
【図7】分岐路におけるマッチング処理を説明するための模式図である。
【図8】図7においてマッチングエラーが生じた場合の処理を説明するための模式図である。
【符号の説明】
【0106】
10・・・・ナビゲーションシステム
12・・・・ネットワーク
20・・・・ナビゲーション端末装置
211・・・制御手段
212・・・衛星航法手段
213・・・自律航法手段
214・・・測位手段選択部
215・・・マッチング処理手段
216・・・配信要求編集手段
217・・・通信手段
218・・・配信データ記憶手段
219・・・地点記憶手段
220・・・表示手段
221・・・操作・入力手段
30・・・・経路探索サーバ
311・・・制御手段
312・・・通信手段
313・・・配信データ編集手段
314・・・経路探索手段
315・・・道路ネットワークデータ
316・・・地図データ
【特許請求の範囲】
【請求項1】
衛星航法手段と自律航法手段と、衛星航法手段または自律航法手段により測位した移動体の現在位置をノードとノード間を結ぶリンクにより表現されたネットワークデータにマッチングするマッチング処理手段を有するナビゲーションシステムであって、
前記ナビゲーションシステムは、地点記憶手段と、測位手段選択部と、を備え、
前記マッチング処理手段は、前記自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶し、
前記測位手段選択部は、所定の選択条件に従って前記衛星航法手段または自律航法手段の測位出力の何れかを選択し、
前記マッチング処理手段は、前記測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、前記地点記憶手段を参照し、当該進行方向に合致するリンク上の前記推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、前記地点記憶手段を参照し、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択することによりマッチングすることを特徴とするナビゲーションシステム。
【請求項2】
前記地点記憶手段に記憶される推定位置の地点情報は分岐ノード毎にリセットされることを特徴とする請求項1に記載のナビゲーションシステム。
【請求項3】
前記マッチング処理手段は、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しないようにしたことを特徴とする請求項1または請求項2に記載のナビゲーションシステム。
【請求項4】
衛星航法手段と自律航法手段と、衛星航法手段または自律航法手段により測位した移動体の現在位置をノードとノード間を結ぶリンクにより表現されたネットワークデータにマッチングするマッチング処理手段と、地点記憶手段と、測位手段選択部と、を有するナビゲーションシステムにおけるマッチング方法であって、
前記マッチング処理手段が、前記自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶するステップと、
前記測位手段選択部が、所定の選択条件に従って前記衛星航法手段または自律航法手段の測位出力の何れかを選択するステップと、
前記マッチング処理手段が、前記測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、前記地点記憶手段を参照し、当該進行方向に合致するリンク上の前記推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、前記地点記憶手段を参照し、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択するステップと、
からなることを特徴とするマッチング方法。
【請求項5】
前記推定位置の地点情報を地点記憶手段に記憶するステップは、分岐ノード毎にリセットする処理を含むことを特徴とする請求項4に記載のマッチング方法。
【請求項6】
前記推定位置の地点情報を地点記憶手段に記憶するステップは、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しない処理を含むことを特徴とする請求項4または請求項5に記載のマッチング方法。
【請求項7】
衛星航法手段と自律航法手段を備えたナビゲーション端末装置とネットワークを介して接続され、前記衛星航法手段または自律航法手段により測位した移動体の現在位置をノードとノード間を結ぶリンクにより表現されたネットワークデータにマッチングするマッチング処理手段を有する経路探索サーバからなるナビゲーションシステムを構成する経路探索サーバであって、
前記経路探索サーバは、更に、地点記憶手段と、測位手段選択部と、を備え、
前記マッチング処理手段は、前記自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶し、
前記測位手段選択部は、所定の選択条件に従って前記衛星航法手段または自律航法手段の測位出力の何れかを選択し、
前記マッチング処理手段は、前記測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、前記地点記憶手段を参照し、当該進行方向に合致するリンク上の前記推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、前記地点記憶手段を参照し、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択することによりマッチングすることを特徴とする経路探索サーバ。
【請求項8】
前記地点記憶手段に記憶される推定位置の地点情報は分岐ノード毎にリセットされることを特徴とする請求項7に記載の経路探索サーバ。
【請求項9】
前記マッチング処理手段は、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しないようにしたことを特徴とする請求項7または請求項8に記載の経路探索サーバ。
【請求項10】
衛星航法手段と自律航法手段を備え、前記衛星航法手段または自律航法手段により測位した移動体の現在位置をノードとノード間を結ぶリンクにより表現されたネットワークデータにマッチングするマッチング処理手段を有するナビゲーション端末装置がネットワークを介して経路探索サーバに接続されるナビゲーションシステムを構成する前記ナビゲーション端末装置であって、
前記ナビゲーション端末装置は、更に、地点記憶手段と、測位手段選択部と、を備え、
前記マッチング処理手段は、前記自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶し、
前記測位手段選択部は、所定の選択条件に従って前記衛星航法手段または自律航法手段の測位出力の何れかを選択し、
前記マッチング処理手段は、前記測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、前記地点記憶手段を参照し、当該進行方向に合致するリンク上の前記推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、前記地点記憶手段を参照し、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択することによりマッチングすることを特徴とするナビゲーション端末装置。
【請求項11】
前記地点記憶手段に記憶される推定位置の地点情報は分岐ノード毎にリセットされることを特徴とする請求項10に記載のナビゲーション端末装置。
【請求項12】
前記マッチング処理手段は、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しないようにしたことを特徴とする請求項10または請求項11に記載のナビゲーション端末装置。
【請求項1】
衛星航法手段と自律航法手段と、衛星航法手段または自律航法手段により測位した移動体の現在位置をノードとノード間を結ぶリンクにより表現されたネットワークデータにマッチングするマッチング処理手段を有するナビゲーションシステムであって、
前記ナビゲーションシステムは、地点記憶手段と、測位手段選択部と、を備え、
前記マッチング処理手段は、前記自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶し、
前記測位手段選択部は、所定の選択条件に従って前記衛星航法手段または自律航法手段の測位出力の何れかを選択し、
前記マッチング処理手段は、前記測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、前記地点記憶手段を参照し、当該進行方向に合致するリンク上の前記推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、前記地点記憶手段を参照し、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択することによりマッチングすることを特徴とするナビゲーションシステム。
【請求項2】
前記地点記憶手段に記憶される推定位置の地点情報は分岐ノード毎にリセットされることを特徴とする請求項1に記載のナビゲーションシステム。
【請求項3】
前記マッチング処理手段は、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しないようにしたことを特徴とする請求項1または請求項2に記載のナビゲーションシステム。
【請求項4】
衛星航法手段と自律航法手段と、衛星航法手段または自律航法手段により測位した移動体の現在位置をノードとノード間を結ぶリンクにより表現されたネットワークデータにマッチングするマッチング処理手段と、地点記憶手段と、測位手段選択部と、を有するナビゲーションシステムにおけるマッチング方法であって、
前記マッチング処理手段が、前記自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶するステップと、
前記測位手段選択部が、所定の選択条件に従って前記衛星航法手段または自律航法手段の測位出力の何れかを選択するステップと、
前記マッチング処理手段が、前記測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、前記地点記憶手段を参照し、当該進行方向に合致するリンク上の前記推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、前記地点記憶手段を参照し、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択するステップと、
からなることを特徴とするマッチング方法。
【請求項5】
前記推定位置の地点情報を地点記憶手段に記憶するステップは、分岐ノード毎にリセットする処理を含むことを特徴とする請求項4に記載のマッチング方法。
【請求項6】
前記推定位置の地点情報を地点記憶手段に記憶するステップは、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しない処理を含むことを特徴とする請求項4または請求項5に記載のマッチング方法。
【請求項7】
衛星航法手段と自律航法手段を備えたナビゲーション端末装置とネットワークを介して接続され、前記衛星航法手段または自律航法手段により測位した移動体の現在位置をノードとノード間を結ぶリンクにより表現されたネットワークデータにマッチングするマッチング処理手段を有する経路探索サーバからなるナビゲーションシステムを構成する経路探索サーバであって、
前記経路探索サーバは、更に、地点記憶手段と、測位手段選択部と、を備え、
前記マッチング処理手段は、前記自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶し、
前記測位手段選択部は、所定の選択条件に従って前記衛星航法手段または自律航法手段の測位出力の何れかを選択し、
前記マッチング処理手段は、前記測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、前記地点記憶手段を参照し、当該進行方向に合致するリンク上の前記推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、前記地点記憶手段を参照し、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択することによりマッチングすることを特徴とする経路探索サーバ。
【請求項8】
前記地点記憶手段に記憶される推定位置の地点情報は分岐ノード毎にリセットされることを特徴とする請求項7に記載の経路探索サーバ。
【請求項9】
前記マッチング処理手段は、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しないようにしたことを特徴とする請求項7または請求項8に記載の経路探索サーバ。
【請求項10】
衛星航法手段と自律航法手段を備え、前記衛星航法手段または自律航法手段により測位した移動体の現在位置をノードとノード間を結ぶリンクにより表現されたネットワークデータにマッチングするマッチング処理手段を有するナビゲーション端末装置がネットワークを介して経路探索サーバに接続されるナビゲーションシステムを構成する前記ナビゲーション端末装置であって、
前記ナビゲーション端末装置は、更に、地点記憶手段と、測位手段選択部と、を備え、
前記マッチング処理手段は、前記自律航法手段から、分岐ノードを通過した後の走行距離を取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を前記地点記憶手段に記憶し、
前記測位手段選択部は、所定の選択条件に従って前記衛星航法手段または自律航法手段の測位出力の何れかを選択し、
前記マッチング処理手段は、前記測位手段選択部により自律航法手段が選択された場合は当該自律航法手段測位結果から移動体の進行方向を判別し、前記地点記憶手段を参照し、当該進行方向に合致するリンク上の前記推定位置の地点をマッチング位置として選択し、衛星航法手段が選択された場合は、前記地点記憶手段を参照し、衛星航法手段が測位した位置に最も近い推定位置の地点をマッチング位置として選択することによりマッチングすることを特徴とするナビゲーション端末装置。
【請求項11】
前記地点記憶手段に記憶される推定位置の地点情報は分岐ノード毎にリセットされることを特徴とする請求項10に記載のナビゲーション端末装置。
【請求項12】
前記マッチング処理手段は、前記推定位置が衛星航法手段の測位地点から所定の距離以上離れた地点についての位置情報を前記地点記憶手段に記憶しないようにしたことを特徴とする請求項10または請求項11に記載のナビゲーション端末装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2006−337114(P2006−337114A)
【公開日】平成18年12月14日(2006.12.14)
【国際特許分類】
【出願番号】特願2005−160633(P2005−160633)
【出願日】平成17年5月31日(2005.5.31)
【出願人】(500168811)株式会社ナビタイムジャパン (410)
【Fターム(参考)】
【公開日】平成18年12月14日(2006.12.14)
【国際特許分類】
【出願日】平成17年5月31日(2005.5.31)
【出願人】(500168811)株式会社ナビタイムジャパン (410)
【Fターム(参考)】
[ Back to top ]