
ナビゲーションシステム、車載機、ナビゲーション方法及びプログラム
【課題】データ提供装置から地図画像などのナビゲーションに関するデータの提供を受けてナビゲーション機能を車載機において実現するナビゲーションシステムであって、車両がナビルートから外れてデータ提供装置にてリルート処理をしている間に、車載機の表示画面によりユーザーがいずれの方角へ向かえば当初のルートへ復帰できるかを予測しやすい技術を提供する。
【解決手段】車載機では、現在位置がナビルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を表示手段に表示させ、現在位置がルートから逸脱したことを検知される場合は記憶手段に記憶された複数の地図画像を用いた案内画面を表示手段に表示させる。このため、車載機に記憶されている複数の画像により、ユーザーが広範な地図を確認することができ、いずれの方角へ向かえば当初のルートへ復帰できるかを予測しやすくすることができる。
【解決手段】車載機では、現在位置がナビルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を表示手段に表示させ、現在位置がルートから逸脱したことを検知される場合は記憶手段に記憶された複数の地図画像を用いた案内画面を表示手段に表示させる。このため、車載機に記憶されている複数の画像により、ユーザーが広範な地図を確認することができ、いずれの方角へ向かえば当初のルートへ復帰できるかを予測しやすくすることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載される車載機へ地図画像をデータ提供装置から提供することによりナビゲーション機能を実現する技術に関する。
【背景技術】
【0002】
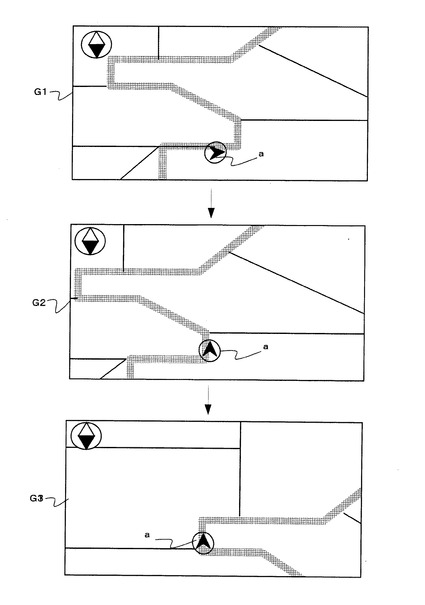
全地球測位システム(GPS = Global Positioning System)を用いて、現在、車両が地球上のどこにいるのかを示す位置データを算出し、この位置データに基づいて自車位置マークを地図画像へ重畳処理したものを車載機のディスプレイに表示させるカーナビゲーションシステムが知られている。図1はこのカーナビゲーションシステムを示す構成図である。車載機は自動車5などの車両に搭載されている。位置データは、車載機において受信する3つ以上のGPS衛星4が発する電波に基づいて算出される。自車位置マークaと地図画像の重畳処理は、図2が示すように、ディスプレイに表示させた地図画像の所定位置に自車位置マークaを固定表示させ、自車位置マークaを現在位置とし、車両の移動によって変化する位置データに応じて地図画像を更新表示する。つまり、車両の移動に応じた周辺地図を更新表示することで、自車位置マークaが移動しているかのような表示を行う。例えば、図2の地図画像G1からG2へ、G2からG3へと地図画像を更新表示する。
【0003】
また、携帯電話やPDA(Personal Digital Assistant)といった携帯端末の性能向上に伴い、これらの携帯端末においてもGPSを用いたナビゲーションシステムが実現されている。このようなナビゲーションシステムでは、携帯端末と、携帯端末と無線通信を行うサーバーとの間において、その機能分担を行っている。機能分担について、例えば、携帯端末が、位置データ取得機能、目的地設定機能、マップマッチング機能、及び、表示機能などを担当し、サーバーが、地図画像蓄積機能、ルート検索機能、及び、地図画像切出し機能などを担当している。このように機能分担を行うことによって、資源が分散・共有されコストの低減を図っている。
【0004】
しかし、カーナビゲーションシステムを搭載した車両へ、ナビゲーションシステム搭載の端末を携帯したユーザーが乗車すると、ナビゲーション機能を実現する資源が重複することになってしまう。この資源の重複を解消し資源の有効活用を図るシステムとして、車載機、携帯端末、及び、サーバーにおいて、その資源を分散しつつナビゲーションに必要なデータを相互に共有するカーナビゲーションシステムが提案されている。例えば、特許文献1に、車載機が携帯電話経由の通信によりサーバーからカーナビゲーションに用いる地図画像を取得する技術が開示されている。
【0005】
このようなシステムにおいて、携帯端末とサーバー間のデータ通信、及び、携帯端末と車載機間のデータ通信は、無線通信、又は、有線通信によって行われるが、それらの通信速度が十分でない場合には、地図画像に自車位置マークaを適切な位置へ重畳できないことがある。例えば、車両が車速40km以上で高速移動することによって、車載機搭載のGPS通信部から取得する位置データが瞬く間に変化する場合に、データ量が比較的大きい地図画像の取得処理が通信速度の遅延などにより遅れ、自車位置マークaに適切な地図画像を車載機の表示部へ重畳表示することができない。つまり、車載機の表示部に表示する地図画像と自車位置マークaの位置との関係に整合性がなく、カーナビゲーションシステムとしての機能を十分に発揮できない虞がある。 そこで、従来のような、現在位置を示す自車位置マークaを固定的に表示して現在位置周辺の地図画像を更新表示させるものとは逆に、地図画像を固定的に表示して維持しつつその地図画像に対して移動するように自車位置マークaを更新表示することが考えられる。この場合は、自車位置マークaが表示されている地図を移動して外れる場合にのみ地図画像を更新表示すればよく、地図画像を頻繁に更新する必要がない。つまり、車載機1において地図画像の取得に関して大きな遅れはなくなり、車載機に表示する地図画像と自車位置マークaとの位置関係に整合を図ることができる。
【0006】
また、地図画像の更新タイミングも適切に行うことによって、更にその整合を図れるようにしている。具体的には、車載機は現在位置と目的地に基づいて設定したルート周辺の地図画像から切出した複数の切出地図画像を、携帯端末、及び、サーバーから先読取得して、複数の地図画像を車載機の記憶部へ予め記憶しておく。つまり、地図画像更新の際には、次の地図画像がその更新の際よりも前に車載機の記憶部に記憶されているので、地図画像の更新が遅れるということはなく、それらの整合を確実に図ることができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平2002−107169号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、車両が設定したルートから外れて走行した場合は、車載機の表示部へ表示されている地図画像は目的地までの案内画像としては適切なものではない。このため、上記のような外部のデータ提供装置(上記の例では、携帯端末及びサーバー)から車載機にナビゲーションに係るデータが提供される(上記の例では、無線通信によりデータが送信される)ナビゲーションシステムにおいては、車両がルートから外れた場合は、データ提供装置においてリルート処理がなされ、現在位置と目的地に基づいて新たなルートが取得される。そして、車載機に対して、データ提供装置から新たなルートを含む地図画像が提供される。
【0009】
しかし、車載機は、データ提供装置でのリルート処理時間や、装置相互間(例えば、携帯端末とサーバーとの間、あるいは、携帯端末と車載機との間)の通信遅れなどが原因で複数の地図画像の取得処理に時間がかかってしまい、リルート処理がなされると、新たなルートを含む地図画像の表示までに時間がかかってしまう。このため、表示部においては、車両の現在位置から目的地までのルートを案内する地図画像を表示することができない。つまり、車載機は、リルート処理を行っている間は、ルートから外れて走行し当初のルートへ復帰したいと思うユーザに対し、リルート処理する前の不適切な地図画像を表示部へ表示させてしまっており、ユーザーは車両を当初のルートから益々外れて走行させてしまう虞がある。
【0010】
本発明は、上記課題に鑑みてなされたものであり、ユーザーがリルート処理中にいずれの方角へ向かえば当初のルートへ復帰できるかを予測しやすい技術を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記課題を解決するため、請求項1の発明は、車両に搭載されて表示手段を有する車載機と、ナビゲーションに関するデータを前記車載機へ提供するデータ提供装置とを有するナビゲーションシステムであって、前記データ提供装置は、前記車両の現在位置を取得する現在位置取得手段と、前記車両の目的地までのルートを取得する第1ルート取得手段と、前記現在位置が前記ルートから逸脱した場合に、該現在位置から前記目的地までの新たなルートを再取得する第2ルート取得手段と、前記車載機の前記表示手段の画面に合わせたサイズの、前記ルートの案内に用いる複数の地図画像を生成する地図画像生成手段と、 生成された前記複数の地図画像を前記車載機に順次送信する送信手段と、を備え、 前記車載機は、前記データ提供装置から前記複数の地図画像を順次受信する受信手段と、前記受信手段において受信済の地図画像を記憶する記憶手段と、前記現在位置が前記ルートから逸脱したことを検知する検知手段と、前記現在位置が前記ルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を前記表示手段に表示させ、前記現在位置が前記ルートから逸脱したことを検知される場合は前記記憶手段に記憶された複数の地図画像を用いた案内画面を前記表示手段に表示させる表示制御手段と、を備える。
【0012】
また、請求項2の発明は、請求項1に記載のナビゲーションシステムにおいて、前記表示手段は、前記現在位置が前記ルートから逸脱したことを検知される場合は、前記記憶手段に記憶されている複数の地図画像の合成画像の全体を前記表示手段に表示させる。
【0013】
また、請求項3の発明は、請求項2に記載のナビゲーションシステムにおいて、前記車載機は、ユーザ操作を受け付ける操作手段、を更に備え、前記表示手段は、前記現在位置が前記ルートから逸脱したことを検知される場合は、前記記憶手段に記憶された複数の地図画像の合成地図画像の一部を前記表示手段に表示させ、前記ユーザ操作に応じてスクロールさせて前記合成地図画像の他の一部を前記表示手段に表示させる。
【0014】
また、請求項4の発明は、請求項1ないし3のいずれかに記載のナビゲーションシステムにおいて、車載機は、前記車両の走行速度を入力する入力手段、を更に備え、前記表示手段は、前記現在位置が前記ルートから逸脱したことを検知された場合に、前記案内画面に用いる前記地図画像の数を前記走行速度に応じて決定する。
【0015】
また、請求項5の発明は、請求項1ないし3のいずれかに記載のナビゲーションシステムにおいて、車載機は、前記地図画像に基づいて前記車両が走行中の走行エリアを判定する判定手段、を更に備え、前記表示手段は、前記現在位置が前記ルートから逸脱したことを検知された場合に、前記案内画面に用いる前記地図画像の数を走行エリアに基づいて決定する。
【0016】
また、請求項6の発明は、請求項1ないし5のいずれかに記載のナビゲーションシステムにおいて、前記車載機は、前記車両の現在位置を前記データ提供装置から受信する位置受信手段と、前記車両に設けられる外部装置からの信号に基づいて前記車両の現在位置を導出する導出手段と、を更に備え、前記表示制御手段は、前記現在位置が前記ルートから逸脱したことを検知されない場合は、前記データ提供装置から受信した現在位置に基づいて前記案内画面中に自車位置マークを表示し、前記現在位置が前記ルートから逸脱したことを検知された場合は、前記導出された現在位置に基づいて前記案内画面中に自車位置マークを表示させる。
【0017】
また、請求項7の発明は、車両に搭載され、データ提供装置からナビゲーションに関するデータの提供を受けて表示手段に案内画面を表示する車載機であって、前記データ提供装置は、前記車両の現在位置が所定のルートから逸脱した場合に、該現在位置から目的地までの新たなルートを再取得するものであり、前記データ提供装置から、前記表示手段の画面に合わせたサイズの、前記ルートの案内に用いる複数の地図画像を順次に受信する受信手段と、前記受信手段において受信済の地図画像を記憶する記憶手段と、前記車両の現在位置が前記ルートから逸脱したことを検知する検知手段と、前記車両の現在位置が前記ルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を前記表示手段に表示させ、前記現在位置が前記ルートから逸脱したことを検知された場合は前記記憶手段に記憶された複数の地図画像を用いた案内画面を前記表示手段に表示させる表示制御手段と、を備える。
【0018】
また、請求項8の発明は、車両に搭載されて表示手段を有する車載機と、ナビゲーションに関するデータを前記車載機へ提供するデータ提供装置とを有するナビゲーションシステムにおけるナビゲーション方法であって、前記データ提供装置が、前記車両の現在位置を取得するステップと、前記データ提供装置が、前記車両の目的地までのルートを取得するステップと、前記データ提供装置が、前記現在位置が前記ルートから逸脱した場合に、該現在位置から前記目的地までの新たなルートを再取得するステップと、前記データ提供装置が、前記車載機の前記表示手段の画面に合わせたサイズの、前記ルートの案内に用いる複数の地図画像を生成するステップと、前記データ提供装置が、生成された前記複数の地図画像を前記車載機に順次送信するステップと、前記車載機が、前記データ提供装置から前記複数の地図画像を順次受信するステップと、前記車載機が、受信済の地図画像を記憶手段に記憶するステップと、前記車載機が、前記現在位置が前記ルートから逸脱したことを検知するステップと、前記車載機が、前記現在位置が前記ルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を前記表示手段に表示させるステップと、前記車載機が、前記現在位置が前記ルートから逸脱したことを検知される場合は前記記憶手段に記憶された複数の地図画像を用いた案内画面を表示手段に表示させるステップと、を実行する。
【0019】
また、請求項9の発明は、車両に搭載され、データ提供装置からナビゲーションに関するデータの提供を受けて表示手段に案内画面を表示する車載機に含まれるコンピュータによって実行可能なプログラムであって、前記データ提供装置は、前記車両の現在位置が所定のルートから逸脱した場合に、該現在位置から目的地までの新たなルートを再取得するものであり、前記プログラムの前記コンピュータによる実行は、前記コンピュータに、前記データ提供装置から前記表示手段の画面に合わせたサイズの、前記ルートの案内に用いる複数の地図画像を順次に受信するステップと、受信済の地図画像を記憶手段に記憶するステップと、前記車両の現在位置が前記ルートから逸脱したことを検知するステップと、前記車両の現在位置が前記ルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を前記表示手段に表示させるステップと、前記現在位置が前記ルートから逸脱したことを検地される場合は前記記憶手段に記憶された複数の地図画像を用いた案内画面を前記表示手段に表示させるステップと、を実行させる。
【発明の効果】
【0020】
請求項1ないし8の発明によれば、車載機は、現在位置がルートから逸脱したことを検知され、ルート再取得を行っている間、記憶手段に記憶された複数の地図画像のみを用いた案内画面を表示手段に表示させるため、ユーザーは比較的広域な地図を示す案内画面を確認でき、いずれの方角へ向かえばルートへ復帰できるかを予測しやすい。
【0021】
また、特に請求項2の発明によれば、車載機は、現在位置がルートから逸脱したことを検知され、ルート再取得を行っている間、記憶手段に記憶された複数の地図画像のみを用いた案内画面を表示手段に表示させるため、ユーザーは複数の地図画像の合成地図画像全体を一目で確認でき、いずれの方角へ向かえばルートへ復帰できるかを予測しやすい。
【0022】
また、特に請求項3の発明によれば、車載機は、現在位置がルートから逸脱したことを検知され、ルート再取得を行っている間、記憶手段に記憶された複数の地図画像のみの合成地図画像の一部を表示手段に表示させ、ユーザ操作に応じてスクロールさせて合成地図画像の他の一部を表示手段に表示させるため、ユーザーは比較的広域な地図を示す案内画面を確認でき、いずれの方角へ向かえばルートへ復帰できるかを予測しやすい。
【0023】
また、特に請求項4の発明によれば、車載機は、現在位置がルートから逸脱したことを検知され、ルート再取得を行っている間、記憶手段に記憶された複数の地図画像のみを用いた案内画面を表示手段に表示させるとともに、案内画面に用いる地図画像の数を走行速度に応じて決定するので、案内画面に必要な情報量が適切なものに調整され、ユーザはいずれの方角へ向かえばルートへ復帰できるかを予測しやすい。
【0024】
また、特に請求項5の発明によれば、車載機は、現在位置がルートから逸脱したことを検知され、ルート再取得を行っている間、記憶手段に記憶された複数の地図画像のみを用いた案内画面を表示手段に表示させるとともに、案内画面に用いる地図画像の数を走行エリアに応じて決定するので、走行エリアの特性に応じて必要な情報量が適切なものに調整され、ユーザはいずれの方角へ向かえばルートへ復帰できるかを予測しやすい。
【0025】
また、特に請求項6の発明によれば、車載機は、現在位置がルートから逸脱したことを検知され、ルート再取得を行っている間、車両に設けられる外部装置からの信号に基づいて導出手段により導出された現在位置に基づいて案内画面中に自車位置マークを更新表示させるため、データ提供装置から現在位置データを受信しなくてもユーザはどこを走行しているかを認識できる。
【図面の簡単な説明】
【0026】
【図1】図1は、ナビゲーションシステムの構成を説明する図である。
【図2】図2は、ナビゲーションシステムの構成を説明する図である。
【図3】図3は、ナビゲーションシステムにおける表示地図画像を示す図である。
【図4】図4は、車載機のシステムブロック図である。
【図5】図5は、携帯端末のシステムブロック図である。
【図6】図6は、サーバーのシステムブロック図である。
【図7】図7は、ナビゲーションシステムの動作を示すフローチャート図である。
【図8】図8は、ナビゲーションシステムにおけるルート周辺地図画像を示す図である。
【図9】図9は、ナビゲーションシステムの動作を示すフローチャート図である。
【図10】図10は、ナビゲーションシステムにおけるルート周辺地図画像を示す図である。
【図11】図11は、ナビゲーションシステムの動作を示すフローチャート図である。
【図12】図12は、ナビゲーションシステムにおける表示地図画像を示す図である。
【図13】図13は、ナビゲーションシステムの動作を示すフローチャート図である。
【図14】図14は、ナビゲーションシステムにおける表示地図画像を示す図である。
【図15】図15は、ナビゲーションシステムの動作を示すフローチャート図である。
【図16】図16は、ナビゲーションシステムの動作を示すフローチャート図である。
【図17】図17は、ナビゲーションシステムにおける表示地図画像を示す図である。
【図18】図18は、ナビゲーションシステムの構成を説明する図である。
【発明を実施するための形態】
【0027】
以下、添付図面を参照しながら本発明の実施の形態について説明する。
【0028】
<実施の形態>
<1.第1の実施の形態>
<1.1ナビゲーションシステムの構成>
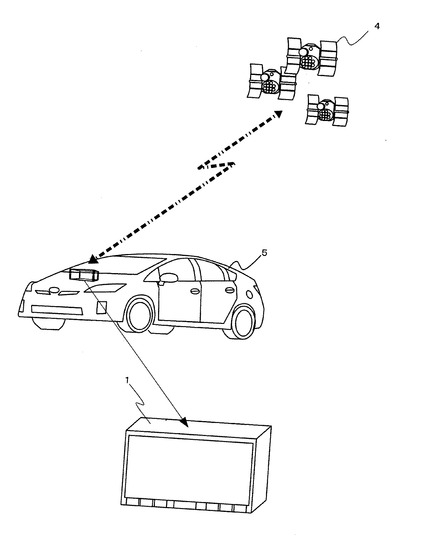
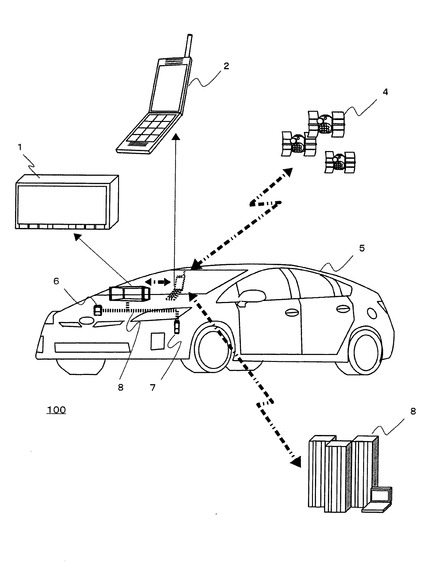
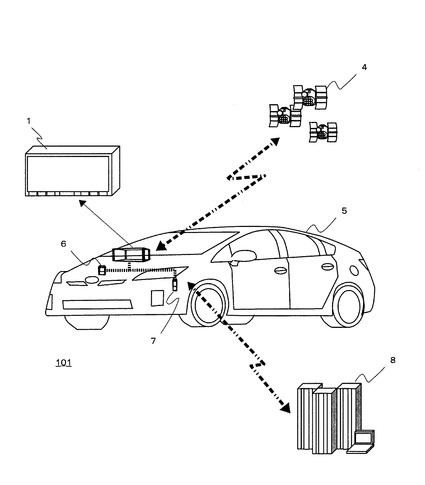
図3は、第1の実施の形態のナビゲーションシステム100を示す構成図である。ナビゲーションシステム100は、自動車5などの車両に搭載される車載機1、並びに、データ提供装置である携帯端末2及びサーバー3により構成される。車載機1は携帯端末2と、例えば、Bluetooth(登録商標)規格に基づく近距離無線通信を行ってナビゲーションに関するデータなどを送受信する。通信はUSB接続などによる有線通信を利用しても良い。携帯端末2は車載機1と近距離無線通信を行ってナビゲーションに関するデータなどを送受信し、GPS衛星4と無線通信を行って現在位置を測定するためのデータなどを受信する。更に、携帯端末2は、サーバー3と無線通信を行ってナビゲーションに関するデータなどを送受信する。GPS衛星4は携帯端末2と無線通信を行って現在位置を測定するためのデータなどを送信する。サーバー3は携帯端末2と無線通信を行ってナビゲーションに関するデータなどを送受信する。ナビゲーションシステム100は、このような通信により取得したナビゲーションに関するデータに基づいて、車載機1、携帯端末2、及び、サーバー3が後述するナビゲーション機能を実現する。
【0029】
本実施の形態のナビゲーションシステム100においては、携帯端末2及びサーバー3が連携して動作し、ナビゲーションに関するデータを車載機1へ提供する。従って、携帯端末2とサーバー3とを組み合わせたものが、ナビゲーションに関するデータを車載機1へ提供するデータ提供装置であるともいえる。
(システムブロック図)
(車載機)
図4は、車載機1のシステムブロック図である。車載機1は、ナビゲーション機能、又は、楽曲再生機能などを実現するために種々の制御を行う制御部10、目的地までのルートを強調表示して目的地まで案内する案内画面となる地図画像などを表示するとともにユーザー操作を受け付ける表示・操作部11(例えば、タッチパネル)、その他のユーザー操作を受け付ける操作部12、楽曲や操作時の効果音などを出力する音出力部13、制御に必要なデータを記憶する記憶部14(例えば、Flash Memory)、所定距離内、例えば、半径10−100m以内の通信相手とBluetooth(登録商標)規格に従って通信可能な近距離無線通信部15、及び、入出力部16(I/F)を備える。入出力部16は、車載ネットワーク8(例えば、Control Area Netowork)に接続された車両の回転を検出する回転検出部6(例えば、ジャイロセンサ)、及び、車両の移動速度を検出する車速検出部7(例えば、車速センサ)などからの検出値を示す信号を車載ネットワークを介して受信する。回転検出部6及び車速検出部7は、車両において車載機1とは別に設けられた外部装置である。
【0030】
ナビゲーション機能を実現する際には、案内画面は、表示・操作部11に表示する。また、携帯端末2から提供される地図画像や位置データなどのナビゲーションに関するデータは近距離無線通信部15によって受信され、車載機1から携帯端末2へ送信するナビゲーションに関するデータも近距離無線通信部15によって送信する。
【0031】
制御部10は、CPU等を備えたマイクロコンピュータにより構成する。制御部10は、所定のメモリ(例えば、ROM)に記憶されたプログラムに従ってCPUが演算処理を行うことでナビゲーションシステムに関する機能を実現する。このプログラムは、予め記憶部14などに記憶されるものであるが、外部サーバとの通信やプログラムを記憶した記録媒体の読み取りなどにより更新可能となっていてもよい。
【0032】
制御部10が実現するナビゲーション機能の主なものには次の(A)〜(G)がある。
【0033】
(A)制御部10が、近距離無線通信部15によって受信された地図画像と位置データとに基づいて地図画像の適切な位置に自車位置マークaを表示・操作部11へ重畳表示する重畳表示機能。
【0034】
(B)制御部10が、記憶部14に記憶されている複数の地図画像を合成する画像合成機能。
【0035】
(C)制御部10が、表示・操作部11における自車位置マークaの表示位置を近距離無線通信部15により、所定周期で受信した座標データに基づいて更新表示する自車位置マーク更新機能。
【0036】
(D)制御部10が、自車位置マークaの表示位置を入出力部16により受信した回転検出部6や車速検出部7からの検出値に基づいて更新表示する自律航法表示機能。
【0037】
(E)制御部10が、携帯端末2から受信した切出地図画像の枚数を所定の枚数に維持して記憶部14へ記憶する制御を行う地図画像記憶機能。
【0038】
(F)制御部10が、表示・操作部11へ表示している切出地図画像における所定の更新位置に座標データが含まれるようになった場合に次に表示すべき切出地図画像を更新表示する地図画像更新機能。
【0039】
(G)制御部10が、表示・操作部11へ表示している切出地図画像における目的地に座標データが含まれるようになった場合にナビゲーションを終了させる案内終了判定新機能。
【0040】
なお、これらの機能の詳細については後述する。
【0041】
また、制御部10は、後述するナビゲーション機能を実現するために必要なステップを実行するため車載機1の各部の制御を行う。
(携帯端末)
図5は、携帯端末2のシステムブロック図である。携帯端末2は、通話機能、及び、ナビゲーション機能などを実現するために種々の制御を行う制御部20、通話をする際に電話番号などを表示する表示部21、ユーザー操作を受け付ける操作部22、通話の際に通話相手の音声、操作時の効果音、若しくは、Eメール着信時の着信音などを出力する音出力部23、通話の際に通話相手と話す音声を入力する音入力部24、制御に必要なデータを記憶する記憶部25(例えば、Flash Memory)、無線通信により他の携帯端末と通話するために通話データを送受信する通話通信部26、GPS衛星4から発信される信号を受信するGPS通信部27、無線通信によりサーバーとナビゲーションに関するデータなどを送受信する通信部28、及び、所定距離内、例えば、半径10−100m以内の通信相手とBluetooth(登録商標)規格に従ってデータ通信可能な近距離無線通信部29を備える。
【0042】
本実施の形態のナビゲーションシステム100が機能する場面においては、携帯端末2はユーザ(車両のドライバ)が携帯しているものであるため、車両内に位置している。従って、GPS通信部27は、車両の現在の位置データとなる現在位置データを取得する。
【0043】
制御部20は、CPU等を備えたマイクロコンピュータにより構成する。制御部20は、所定のメモリ(例えば、ROM)に記憶されたプログラムに従ってCPUが演算処理を行うことで、ナビゲーションに関する機能を実現する。このプログラムは、予め記憶部25などに記憶されるものであるが、外部サーバとの通信やプログラムを記憶した記録媒体の読み取りなどにより更新可能となっていてもよい。
【0044】
制御部20が実現するナビゲーション機能の主なものには次の(H)〜(K)がある。
【0045】
(H)サーバー3から受信したルート周辺地図画像から車載機1の表示・操作部11へ表示可能な地図画像を切出す切出地図画像生成機能(以降、切出地図画像という)。
【0046】
(I)制御部20がGPS通信部27により受信した位置データに基づいて地図画像の座標のどこに自車位置マークaが位置するかを算出する座標算出機能。
【0047】
(J)制御部20が地図画像の適切な位置へ重畳表示できるように座標データを補正するマップマッチグ機能。
【0048】
(K)制御部20が座標データが地図画像に含まれるルートを逸脱したか否かを判定するルート逸脱判定機能。
【0049】
なお、これら機能の詳細については後述する。
【0050】
また、制御部20は、後述するナビゲーション機能を実現するために必要なステップを実行するために、携帯端末2の各部の制御を行う。
(サーバー)
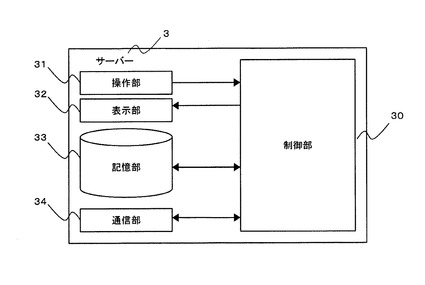
図6は、サーバー3のシステムブロック図である。サーバー3は、ナビゲーション情報などのコンテンツ提供機能を実現するために種々の制御を行う制御部30、制御に必要な設定、若しくは、制御プログラムや制御データのメンテナンスなどを行うために管理者の操作を受け付ける操作部31、設定画面、若しくは、メンテナンス画面などを表示する表示部32、地図画像などのコンテンツを蓄積する記憶部33、及び、無線通信により携帯端末2とナビゲーションに関するデータなどを送受信する通信部34を備える。
【0051】
制御部30は、CPU等を備えたマイクロコンピュータにより構成する。制御部30は、所定のメモリ(ROM)に記憶されたプログラムに従ってCPUが演算処理を行うことで、ナビゲーションに関する機能を実現する。
【0052】
制御部30が実現するナビゲーション機能の主なものには次の(L)〜(M)がある。
【0053】
(L)車両の現在位置データと目的地データとに基づいてルートを作成するルート作成機能(車両がルートから外れた場合に、新たなルートを作成する機能を含む。)。
【0054】
(M)作成したルート全体の周辺の地図画像を記憶部33から切出すルート周辺画像作成機能。
【0055】
なお、これら機能の詳細については後述する。
【0056】
また、制御部30は、後述するナビゲーション機能を実現するために必要なステップを実行するために、サーバー3の各部の制御を行う。
【0057】
<1.2ナビゲーションシステム制御処理>
<携帯連携制御処理>
(車載機)
車載機1が備える制御部10が実行する制御処理を説明する。制御部10は、ユーザーにより車両のイグニッションキーが操作されACC(アクセサリー)がONにされた場合に、電源(バッテリー)から電力が供給され、種々の制御処理を実行可能な状態になる。制御部10が種々の制御処理を実行可能な状態になると、表示・操作部11、又は、操作部12においてユーザーが操作した内容に応じた制御処理を実行する。例えば、車載機1はナビゲーション機能、楽曲再生機能、又は、携帯連携機能などの種々の機能をユーザーが選択可能にするためのメニューを表示・操作部11へ表示し、ユーザーがこのメニューのうち携帯連携機能を選択した場合は、制御部10は携帯連携機能を実現するための制御処理を実行する。
【0058】
携帯連携機能を実現するためには携帯端末2やサーバー3との通信を確立するためにペアリング制御を実行する必要がある。ここで、ペアリング制御とは、携帯端末2の制御部20が近距離無線通信部21を制御して車載機1の近距離無線通信部15と無線通信を確立させ、更に、制御部20が通信部28を制御してサーバー3の通信部34と無線通信を確立させる制御をいう。
【0059】
車載機1の制御部10は、ペアリング制御が確立した後は、複数のコンテンツ提供サービスメニューを表示・操作部11へ表示する。例えば、メニューには、ナビゲーション提供サービス、楽曲提供サービス、又は、ニュース提供サービスなどがある。ナビゲーションサービスが選択された場合は、車載機1の制御部10が選択されたナビゲーションシステムを携帯端末2及びサーバー3と連携して実行する。
(携帯端末)
携帯端末2が備える制御部20が実行する制御処理を説明する。制御部20は、ユーザーにより携帯端末に備わる電源ボタンがONにされた場合に、電源(バッテリー)から電力が供給されて種々の制御処理を実行可能な状態になる。制御部20が種々の制御処理を実行可能な状態になると、ユーザーが操作部22を操作した内容に応じた制御処理を実行する。例えば、携帯端末2は通話機能、インターネット閲覧機能、又は、携帯連携機能など種々の機能を操作部22においてユーザーが操作可能にされている。ユーザーがこの操作部22により携帯連携機能を選択した場合は、制御部20は携帯連携機能を実現するためにペアリング制御処理を実行する。
【0060】
制御部20は、ペアリング制御を確立させた後に、車載機1においてナビゲーションサービスが選択された場合は、ナビゲーション提供サービスを車載機1及びサーバー3と連携して実行する。
(サーバー)
サーバー3が備える制御部30が実行する制御処理を説明する。制御部30は管理者によりサーバー3に備わる電源ボタンが操作されONにされた場合に、電源(商用電源)からの電力が供給されて種々の制御処理を実行可能な状態になる。制御部30が種々の制御処理を実行可能な状態になると、管理者が操作部31を操作した内容に応じた制御処理、又は、コンテンツ提供制御処理を実行する。つまり、管理者の操作部31の操作によりコンテンツ提供制御処理の実行が選択されると、制御部30は車載機1や携帯端末2などのクライアントからの要求に応じて地図画像などのコンテンツを提供する。クライアントである携帯端末2から携帯連携機能を実現するためにペアリング制御の実行要求があると、この要求に応じてペアリング制御を実行する。
【0061】
制御部30は、ペアリング制御を確立させた後に、車載機1においてナビゲーションサービスが選択された場合は、ナビゲーション提供サービスを携帯端末2及びサーバー3と連携して実行する。
【0062】
以降、車載機1の表示・操作部11に表示されたコンテンツ提供サービスメニューのうち、ユーザーによってナビゲーション提供サービスが選択された場合の車載機1、携帯端末2、及び、サーバー3の制御を説明する。
【0063】
<1.2.1ナビゲーション制御処理>
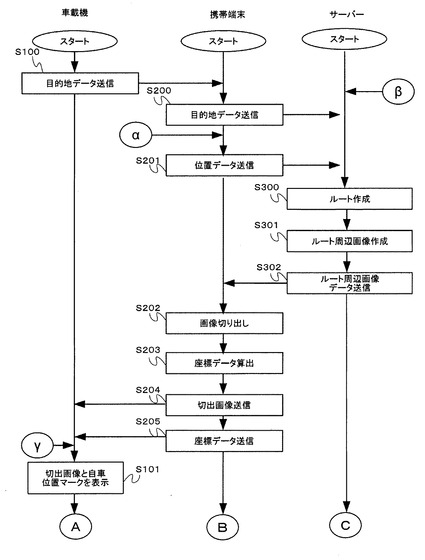
図7において、ナビゲーションシステム100が実行するナビゲーション提供サービスを説明する。
【0064】
S100において、制御部10は表示・操作部11へ目的地設定画面を表示する。目的地設定画面はユーザーが行きたい場所を入力可能な画面である。この画面においてユーザーにより目的地が入力され決定ボタンが操作されると、車載機1は携帯端末2へその目的地データを送信する。
【0065】
S200において、携帯端末2の制御部20は車載機1から受信した目的地データをサーバー3へ送信する。
【0066】
さらに、S201において、制御部20は携帯端末2が備えるGPS通信部27から受信して測定した位置データをサーバー3へ送信する。
【0067】
<ルート作成処理>
S300において、サーバー3の制御部30はルート作成機能により、受信した目的地データ、位置データ、及び、記憶部33(地図画像ベース)に記憶されている地図画像に基づいて走行ルートを作成する。ルートの作成は、例えば、地図画像の現在位置から目的地までに存在する道路に関連付けられている特性を参照し、各ルートのコンセプトに応じた道路を組み合わせることにより実現する。
【0068】
<ルート周辺画像作成処理>
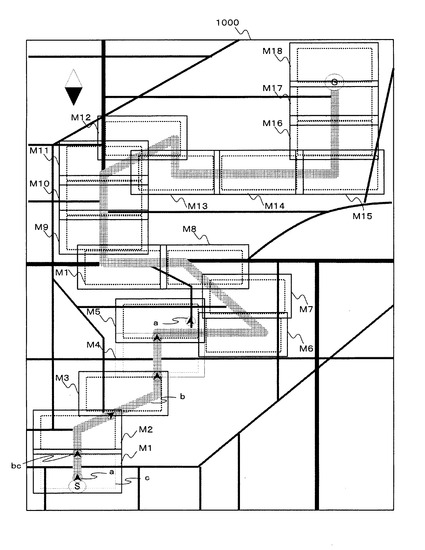
S301において、サーバー3の制御部30はルート周辺画像作成機能により、作成したルート全体の周辺の地図画像を記憶部33から切出す。例えば、図8に示すルート周辺地図画像1000のようなものである。
【0069】
S302において、サーバー3の制御部30は切出したルート周辺地図画像1000を携帯端末2へ送信し、Cへ移行する。Cへ移行すると、フローチャート図9に示すS303以降の処理を実行する。
【0070】
<地図画像切出処理>
S202において、携帯端末2の制御部20は、地図画像生成機能により、受信したルート周辺地図画像1000を記憶部25へ記憶させ、記憶させたルート周辺地図画像から、車載機1の表示・操作部11へ表示するのに適したサイズの地図画像を切出して生成する。このような処理をする理由は、ルート周辺地図画像1000は、ルートの全体を含むものであるため、車載機1の表示・操作部11への表示するにはサイズが大きすぎて適さないからである。この処理によって、ルートに沿った互いに範囲の異なる複数の地図画像が切り出されることになる。
【0071】
例えば、制御部20は、図8のルート周辺地図画像1000において地図画像M1〜M19を切出し、車載機1の表示・操作部11において表示可能にする。
【0072】
この切出地図画像の切出し方法を具体的に説明する。制御部20が次の処理を実行する。制御部20は、ルート周辺地図画像1000から、次の条件を満たすように始めの切出地図画像M1を切出す。ルート上のスタート位置を含める(第1条件)。切出す地図画像量を、車載機1の表示・操作部11へ表示するのに適したデータ量とする(第2条件)。地図方向を北が上方になるような地図方向とする(第3条件)。そのスタート位置を切出地図画像M1の下方とする(第4条件)。そのスタート位置を切出地図画像M1の左右方向の略中央にする(第5条件)。
【0073】
次に制御部20は、ルート周辺地図画像1000から、次の条件を満たすように次の切出地図画像M2を切出す。一つ前の切出地図画像M1の周辺の更新領域c(後述)とルートが重なる位置をスタート位置とし、このスタート位置を含める(第1条件)。地図画像量を、車載機1の表示・操作部11へ表示するのに適したデータ量とする(第2条件)。地図方向を北が上方になるような地図方向とする(第3条件)。そのスタート位置を、更新領域が縦方向の場合は切出地図画像の縦方向の縁とし、更新領域が横方向の場合は横方向の縁とする(第4条件)。第4条件においてそのスタート位置が切出地図画像の縦方向の縁の場合は、そのスタート位置を上下略中央にし、そのスタート位置が切出地図画像の横方向の縁の場合は、そのスタート位置を左右方向の略中央にする(第5条件)。
【0074】
このような処理を目的地を含む最後の切出地図画像M19まで繰り返す。
【0075】
つまり、制御部20は車載機1の表示・操作部11において地図画像が更新される際は、必ず自車位置マークaが地図画像の縦の縁の上下方向略中央、又は、横の縁の左右方向略中央の何れかに位置し、かつ、必ず地図方向の上が北となるノースアップ表示が可能な地図画像を切出す処理を実行する。
【0076】
このように、地図画像更新の際には、常に自車位置マークaが地図画像の縦方向の縁の上下中央、又は、横方向の縁の左右方向の略中央の何れかに表示され、かつ、地図方向の上が必ず北となる地図画像表示となるので、地図画像更新の際は自車位置マークaが地図画像において一定の位置に表示され、ユーザーは自車位置マークaを見失うことなくナビゲーションシステムを利用することができる。
【0077】
S204において、携帯端末2の制御部20は、所定枚数、例えば、4枚の切出地図画像を送信する。なお、切出地図画像には、縦軸(X)と横軸(Y)において、一意のアドレスデータが付与されている。このアドレスデータは後述する画像合成処理の際に機能する。
【0078】
<座標データ算出処理>
S203において、携帯端末2の制御部20は、座標データ算出機能により、GPS通信部27が、GPS衛星4から発信される信号に基づいてその時点の車両の位置データを受信する。携帯端末2の制御部20はこの位置データに基づいて、切出地図画像のどの位置に自車位置マークaが位置するのかを示す座標データを算出する。座標データは、例えば、X:Y=350:20のように縦軸(X)と横軸(Y)の数値で構成される。
【0079】
<マップマッチング処理>
更に、携帯端末2の制御部20は、マップマッチング機能により、車両に備わる各種センサからのデータ(速度、変速段、方位などを示すデータ)を車載機1から受信し、これらのデータと座標データに基づいてマップマッチングを行う。マップマッチングとは、各種センサの検出データに基づいて算出される車両の走行軌跡と、切出地図画像における道路のラインとにおいて類似するものが無いかを判断し、類似するものがある場合はその位置を「真」とし、「真」とされる座標と座標データとの差分係数kを求め、それを補正項とし座標データ算出処理により算出した座標データへその補正項を乗じることをいう。
【0080】
S205において、携帯端末2の制御部20は、マップマッチング後の座標データを車載機1へ送信し、Bへ移行する。Bへ移行すると、フローチャート図9に示すS206以降の処理を実行する。車載機1はこれら切出地図画像と座標データを、記憶部14へ記憶する。
【0081】
<重畳表示処理>
S101において、車載機1の制御部10は、重畳表示機能により、受信した切出地図画像、及び、座標データに基づく自車位置マークaを表示・操作部11へ重畳表示し、Aへ移行する。Aへ移行すると、フローチャート図9に示すS102以降の処理を実行する。重畳表示するとは、切出地図画像M1と、地図画像M1上において座標データにより定まるポイントに自車位置マークaとを重ねて表示させることをいう。
【0082】
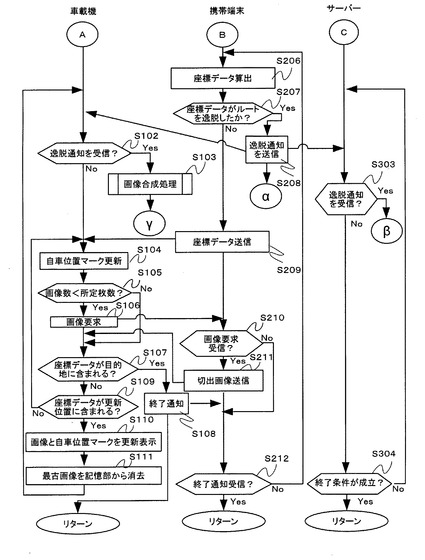
次に、図9のフローチャート図におけるS206において、S203における処理と同様に携帯端末2の制御部20は座標データを算出する。
【0083】
<ルート逸脱判定処理>
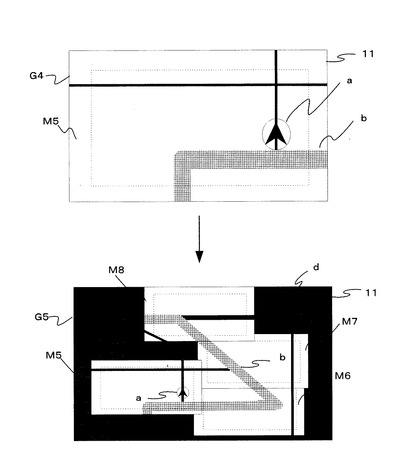
S207において、携帯端末2の制御部20は、ルート逸脱判定機能により、算出した座標データが記憶部14に記憶する切出地図画像M1〜M19、又は、ルート周辺地図画像1000に含まれるルートを逸脱しているか否かを判断する。具体的には、例えば、マップマッチングでは修正できない程度に座標データがルートから離れたことや、車両の進行方向がルートの進行方向と異なっていることなどに基づいて座標データがルートを逸脱していると判断する。例えば、図10に示すようにM5に表示されている自車位置マークaがルートbから逸脱したか否かを判断する。制御部20は座標データがルートを逸脱すると判断する場合は、S208へ移行する(S207にてYes)。座標データがルートを逸脱すると判断しない場合は、S209へ移行する(S209にてNo)。
【0084】
S208において、携帯端末2の制御部20は、逸脱通知を車載機1とサーバー3へ送信し、αへ移行する。αへ移行すると、フローチャート図7に示すS201以降の処理を実行する。つまり、この処理は携帯端末2が実行するリルート処理を意味する。制御部20は座標データがルートを逸脱すると判断しない場合は、S209へ移行する(S207にてNo)。
【0085】
S102において、車載機1の制御部10は、逸脱通知を受信したか否かを判断し、受信したことを判断する場合は、S103へ移行する(S102にてYES)。制御部10は、逸脱通知を受信したことを判断しない場合は、S104へ移行する(S102にてNo)。制御部10はこの逸脱通知を受信することをもって、逸脱したことを検知することとする。なお、制御部10が、携帯端末2の制御部10が実施するルート逸脱判定処理を実行することとしても良い。
【0086】
S303において、サーバー3の制御部30は、逸脱通知を受信したか否かを判断し、受信したことを判断する場合はβへ移行する(S303にてYes)。βへ移行すると、フローチャート図7に示すS300以降の処理を実行する。つまり、この処理はサーバー3が実行するリルート処理をを意味する。制御部30は、逸脱通知を受信したことを判断しない場合は、S304へ移行する(S303にてNo)。
【0087】
S303において、サーバー3の制御部30は、サーバー3の終了条件が成立したか否かを判断する。サーバー3の終了条件が成立したか否かは、サーバーのコンテンツ提供サービスであるナビゲーション機能の停止命令や、電源供給の停止などをいう。終了条件が成立したと判断する場合は、制御を終了する(S304にてYes)。終了条件が成立しないと判断する場合は、S303以降の制御を繰り返す(S304にてNo)。
【0088】
<画像合成処理>
S103において、車載機1の制御部10は、画像合成機能により、画像合成処理を実行する。画像合成処理は、フローチャート図11に基づいて説明する。
【0089】
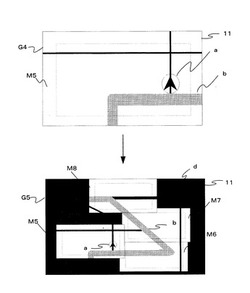
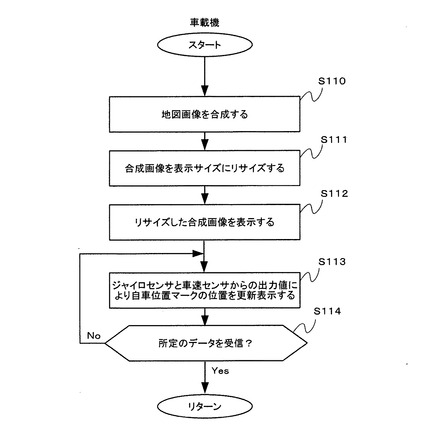
S110において、車載機1の制御部10は、記憶部14に記憶されている複数の地図画像を用いた案内画面を表示・操作部11へ表示する。つまり、制御部10は記憶部14に記憶されている所定枚数、例えば、4枚のうち4枚の地図画像を合成処理する。図10に示すM5の地図画像において自車位置マークaがルートbを逸脱する場合の拡大図を図12のG4に示す。制御部10は、図10のG4が示すような状況にあると判断した場合は、図12のG5に示すように、M5からM8までの4枚の地図画像を合成し、かつ、合成した地図画像の全体を車載機1の表示・操作部11へ表示できるようなサイズにリサイズする。地図画像の合成処理は、地図画像へ付与されている一意のアドレスデータに基づいて実行する。この合成処理を詳述すると、切出地図画像のX軸とY軸に付与された複数の一意のアドレスが全ての切出地図画像へ付与されており、かつ、隣接する切出し地図画像同士の連続するエリアのアドレスには、同じアドレスデータが付与されている。制御部10は、切出し地図画像に付与されている一意のアドレスが相互に一致するポイントを接続する。これを複数の切出地図画像全てで行うことによって合成処理が実現される。更に、制御部10は、図12のG5に示すように合成した地図画像の全体を表示させる際に不足する地図データcについては、黒くするなどして画像を加工する。
【0090】
S111において、車載機1の制御部10は、リサイズした合成地図画像を表示・操作部11へ表示する。
【0091】
画像合成処理について、換言すると、画像合成処理は、切出地図画像に含まれるルートが連続するように、記憶部14に記憶されている複数の切出地図画像を並べて合成するとともに、その合成画像の全体が、車載機の表示・操作部11へ表示できるように、その合成画像を縮小し、縮小する際に記憶部14に記憶されてないために不足する地図画像については、単一の色(例えば、黒色)を表示させる処理を実行する。
【0092】
<自律航法表示処理>
車載機1の制御部10は、自律航法表示機能により、データ提供装置である携帯端末2とサーバー3から受信するデータに基づかずに自車位置マークaを適切に表示する。自律航法表示機能について説明する。制御部10は、データ提供装置である携帯端末2とサーバー3とが連携してリルート処理を実行している間は、データ提供装置においては、その処理を優先して実行しているため、携帯端末2から自車位置マークの座標データの定期的な受信が滞ってしまう。そこで、制御部10は、車載ネットワーク8を介して受信した回転検出部6、及び、車速検出部7からの検出値と、受信処理が停止する直前の座標データとに基づいて、現在の地図画像における自車位置マークaの座標データを予測する。
【0093】
S113において、制御部10は、受信直前の座標データから車速データに基づいてどの程度移動したのかを算出し、かつ、回転データに基づいてどの程度方角を変更したのかを算出することによって座標データを予測する。従って、制御部10は携帯端末2から座標データの受信処理が滞っていても、合成地図画像において自車位置マークaを更新表示させることができ、ユーザは車両を走行させているエリアを認識できる。
【0094】
なお、自車位置マークaをGPSに基づいて能動的に表示する方法(以降、能動航法表示)とは逆に、車両の走行データに基づいて自立的に表示するこの方法を自律航法表示という。
【0095】
S114において、車載機1の制御部10は携帯端末2から所定のデータを受信したか否かを判断する。所定のデータを受信したと判断しない場合は、S113へ戻りそれ以降の処理を繰り返す(S114にてNo)。所定のデータを受信したと判断する場合は、合成処理のルーチンを終了して図9のフローチャート図に戻ってγへ移行する。γへ移行すると、フローチャート図7に示すS101以降の処理を実行する。つまり、この処理はデータ提供装置である携帯端末2とサーバー3とが連携してリルート処理を実行した後の車載機1における処理である。
【0096】
<自車位置マーク更新処理>
車載機1の制御部10は、自車位置マーク更新機能により、携帯端末2から所定の周期で受信した座標データに基づいて自車位置マークaを表示・操作部11へ更新表示する。
【0097】
S209において、S206にて算出した座標データを車載機1へ所定の周期、例えば、3秒周期で送信する。
【0098】
S104において、車載機1の制御部10は、表示・操作部11において表示している地図画像において、携帯端末2から座標データを受信する毎に地図画像へ座標データにより定まるポイントへ自車位置マークaを更新して表示する。この際、表示・操作部11における地図画像の表示は維持される。つまり、制御部10は地図画像を固定的に表示して維持しつつその地図画像に対して移動するように自車位置マークaを更新表示する。
【0099】
<地図画像記憶処理>
車載機1の制御部10は、地図画像記憶機能により、所定枚数の切出地図画像を記憶部14へ記憶する。制御部10が切出地図画像を記憶部14へ記憶する最大の枚数は決まっており、例えば、4枚である。制御部10が記憶部14へ記憶する4枚の切出地図画像は、例えば、図8に示す切出地図画像M1〜M19を昇順に並べた場合の順番が連続するものである。
【0100】
従って、始めは記憶部14にはM1〜M4の切出地図画像が記憶されており、制御部10が現在、表示・操作部11へ表示している切出地図画像M1を次の切出地図画像M2へ更新する際には、更新前の切出地図画像M1を記憶部14から消去し、携帯端末2へ新たな切出地図画像M5の送信を要求し、携帯端末2から受信した切出地図画像M5を記憶部14へ記憶する。つまり、制御部10が行う記憶制御は、FIFO(First In First Out)制御であり、記憶部14における切出地図画像の最大記憶枚数を4枚として、最新の切出地図画像を記憶した後に最古の切出地図画像を消去する制御である。
【0101】
携帯端末2の制御部20は、切出地図画像送信要求を車載機1から受信した場合は、車載機1が次に必要とする切出地図画像を送信する。つまり、この例で言えば、M4に順番が連続するM5の切出地図画像を送信する。
【0102】
このような地図画像記憶処理を実行することにより、車載機1の表示・操作部11において切出地図画像を更新する前に、次に表示すべき切出地図画像を車載機1の記憶部14に記憶させておくことができ、地図画像の更新表示遅れが発生することがない。更に、自車位置マークaがルートbを逸脱する場合に、画像合成処理の実行が可能となるとともに、不必要な切出画像を消去することにより記憶部14の容量を適切に維持し他の制御へ記憶容量を供すことが可能となる。
【0103】
この地図画像記憶処理をフローチャート図9に基づいて説明する。
【0104】
S105において、車載機1の制御部10は、記憶部14に記憶している切出地図画像の枚数が所定枚数より少ないか否かを判断する。所定枚数は、例えば、4枚である。4枚より少ないと判断する場合は、S106へ移行する(S105にてYes)。4枚より少ないと判断しない場合は、S107へ移行する(S105にてNo)。ここで、記憶部14に記憶している切出地図画像の枚数が4枚より少なくなっている状況とは、後述する、S111において制御部10が記憶部14から地図画像更新前の切出地図画像を消去した場合である。
【0105】
S106において、車載機1の制御部10は、記憶部14に記憶している切出地図画像の枚数が4枚より少ないため、携帯端末2へ新たな切出地図画像の送信を要求する。
【0106】
S210において、携帯端末2の制御部20は、車載機1から切出地図画像送信要求を受信したか否かを判断する。制御部20は、車載機1から切出地図画像送信要求を受信したと判断した場合は、車載機1において次に記憶しておくべき切出地図画像を送信してS212へ移行する(S210にてNo)。制御部20は、車載機1から切出地図画像送信要求を受信したと判断しない場合は、車載機へ切出地図画像を送信せずにS212へ移行する(S210にてYes)。
【0107】
<案内終了判定処理>
S107において、車載機1の制御部10は、案内終了判定機能により、携帯端末2から受信した座標データが目的地に含まれるか否かを判断する。つまり、ユーザを目的地まで案内することがナビゲーションシステム100の目的であるため、地図画像に含まれる目的地に座標データが含まれる場合には、車両が目的地に到達したものとみなしナビゲーションシステム100を停止する。従って、制御部10は携帯端末から受信した座標データが目的地に含まれると判断する場合は、S108へ移行し案内が終了したことを示す終了通知を携帯端末2へ送信する(S107にてYes)。座標データが目的地に含まれると判断しない場合は、S109へ移行する(S107にてNo)。
【0108】
S212において、携帯端末2の制御部20は終了通知を受信したか否かを判断する。制御部20は終了通知を受信したと判断した場合は座標データ算出処理や座標データ送信処理などのナビゲーション制御を終了する(S212にてYes)。終了通知を受信したと判断しない場合はS206以降の処理を繰り返す(S212にてNo)。
【0109】
<地図画像更新処理>
S109において、車載機1の制御部10は、携帯端末2から受信した座標データが図8で示す切出地図画像M1の更新領域cに含まれるか否かを判断する。ここで、更新領域cとは、表示・操作部11へ表示される地図画像における周りの所定の幅をもった領域、つまり縁をいう。更新領域cとルートbとが重なる位置が更新位置cbとなり、この更新位置cbに自車位置マークaが位置した場合に地図画像を更新する。車両はルートに沿って動くことが想定されるため、本実施の形態においては、更新領域cに座標データが含まれたことをもって、更新位置cbに自車位置マークaが位置したと判断するようになっている。この更新領域cは次に更新表示される地図画像のスタート位置の周辺領域と重なる領域であり、更新表示された際に前の地図画像と連続性を有することをユーザーが認識できるようにしている。座標データが地図画像の更新領域cに含まれるようになったと判断しない場合は、S104へ戻り、S104以降の処理を繰り返す(S109にてNo)。座標データが地図画像の更新領域cに含まれると判断した場合はS110へ移行する(S109にてYes)。
【0110】
S110において、次の切出地図画像M2を記憶部14から読み出して表示・操作部11へ更新表示し、S111へ移行する。この更新表示する切出地図画像は、制御部10が、携帯端末2と連携して行う地図画像記憶処理により、更新する前に記憶部14に記憶されているため更新表示を遅らせることなく適切なタイミングで実行できる。以降、図8が示す切出地図画像M2〜M19においても同じ地図画像更新処理を実行する。
【0111】
S111において、地図画像記憶処理における一部の制御である最古画像の消去制御を行う。つまり、車載機1の制御部10は、記憶部14が4枚よりも多くなったため、記憶部14に記憶させる最大の画像枚数の4枚を維持するために最古の地図画像を消去する。最古の地図画像とは更新する前に表示していた切出地図画像をいう。
【0112】
このように本実施の形態のナビゲーションシステム100は、ユーザーが車両を設定ルートから逸脱させて走行させた場合は、データ提供装置である携帯端末2とサーバー3が連携してリルート処理を実行するが、リルート処理実行開始から車載機1が切出地図画像を取得して表示・操作部11へ表示するまでには、通信速度の遅延などの原因により時間がかかってしまうので、その間は、車載機1の制御部10は記憶部14に記憶されていた複数枚の地図画像のみを合成処理し、その合成した地図画像の全体を表示・操作部11へ表示させることによって、ユーザーへどの方角へ向かえばルートへ復帰できるのかを予測しやすくできる。
【0113】
また、データ提供装置である携帯端末2とサーバー3とが連携してリルート処理を実行している間は、データ提供装置がその処理を優先して実行することにより、車載機1において携帯端末2から座標データの定期的な受信処理が滞るが、車載機1は車載ネットワーク8を介して受信した回転検出部6、及び、車速検出部7からの検出値と、受信処理が停止する直前の座標データとに基づいて、現在の地図画像における自車位置マークaの座標データを予測することにより、合成地図画像において自車位置マークaを更新表示させることができ、ユーザは車両を走行させているエリアを認識することができる。
【0114】
<2.第2の実施の形態>
次に、第2の実施の形態について説明する。この第2の実施の形態は、上記第1の実施の形態と比較して、図9に示すS103において実施される画像合成処理に関して別の処理を行うようになっている。以下では、第1の実施の形態との相違点を中心に説明する。
【0115】
<画像合成処理>
本実施の形態は、車載機1の制御部10が、画像合成機能により、画像合成処理を実行する。本実施の形態は、制御部10が車載ネットワーク8を介して車速検出部7から入出力部16が受信した検出値に基づいて車速値xを取得し、取得した車速値xに応じて記憶部14に記憶している複数画像の合成枚数を変化させる。そのため、第1実施の形態では記憶部14に記憶させておく地図画像の枚数を4枚としていたが、本実施の形態においては、記憶部14に記憶させておく地図画像の枚数を6枚とし、車速値xに応じて地図枚数の合成枚数を柔軟に変化できるようにしている。また、この機能を発揮するためにフローチャート図9におけるS105の地図画像記憶処理において、記憶部14に記憶させる枚数を6枚とする。
【0116】
S103において、車載機1の制御部10が実施する本実施の形態における画像合成処理をフローチャート図13に基づいて説明する。
【0117】
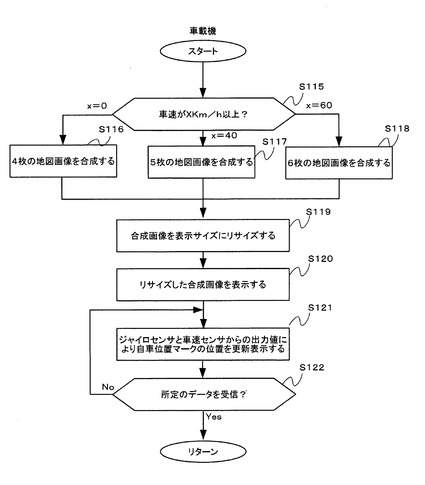
S115において、制御部10は、取得した車速値xが0km/h以上か否かを判断(第1判断)し、次に取得した車速値xが40km/h以上か否かを判断(第2判断)し、次に取得した車速値xが60km/h以上か否かを判断(第3判断)する。制御部10は、この順で車速値xを判断して「真」となる判断結果で後順のものの処理を実行する。例えば、制御部10は、車速値xが50km/hの場合は、第1判断は「真」で、第2判断は「真」、第3判断は「偽」となるので、「真」となる判断結果の後順のものは第2判断の結果であるためこの判断時の処理を実行することになる。換言すると、車速値xが0km/h以上40km/h未満の場合はS116へ移行する。車速値xが40km/h以上60km/h未満の場合はS117へ移行する。車速値xが60km/h以上の場合はS116へ移行する。
【0118】
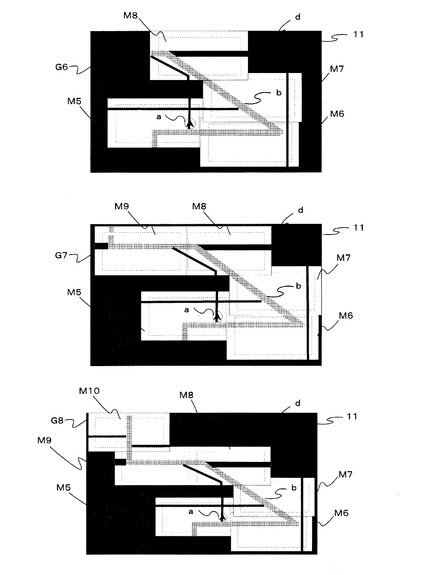
S116において、車載機1の制御部10は、車速検出部7から受信した検出値に基づいて取得した車速値xが0km/h以上40km/h未満であるため、記憶部14に記憶されている6枚の地図画像のうち4枚の地図画像を合成処理する。図14のG6に示すように、M5からM8までの4枚の地図画像を合成する。地図画像の合成処理は、地図画像へ付与されている一意のアドレスデータに基づいて実行する。更に、制御部10は、図14のG7に示すように合成した地図画像の全体を表示させる際に不足する地図データcについては、黒くするなどして画像を加工する。
【0119】
S117において、車載機1の制御部10は、車速検出部7から受信した検出値に基づいて取得した車速値xが40km/h以上60km/h未満であるため、記憶部14に記憶されている6枚の地図画像のうち5枚の地図画像を合成処理する。図14のG7に示すように、M5からM9までの5枚の地図画像を合成する。地図画像の合成処理は、地図画像へ付与されている一意のアドレスデータに基づいて実行する。更に、制御部10は、図14のG7に示すように合成した地図画像の全体を表示させる際に不足する地図データcについては、黒くするなどして画像を加工する。
【0120】
S118において、車載機1の制御部10は、車速検出部7から受信した検出値に基づいて取得した車速値xが60km/h以上であるため、記憶部14に記憶されている6枚の地図画像のうち6枚の地図画像を合成処理する。図14のG8に示すように、M5からM10での6枚の地図画像を合成する。地図画像の合成処理は、地図画像へ付与されている一意のアドレスデータに基づいて実行する。更に、制御部10は、図14のG8に示すように合成した地図画像の全体を表示させる際に不足する地図データcについては、黒くするなどして画像を加工する。
【0121】
S119〜S122の処理はフローチャート図11のS111〜S114と同じであるため説明を省略する。
【0122】
ユーザーが車両を設定ルートから逸脱させて走行させた場合は、データ提供装置である携帯端末2とサーバー3が連携してリルート処理を実行するが、リルート処理実行開始から車載機1が切出地図画像を取得して表示・操作部11へ表示するまでには、通信速度の遅延などの原因により時間がかかってしまうので、その間は、車載機1の制御部10は記憶部14に記憶されていた複数枚の地図画像のみを合成処理し、その合成した地図画像の全体を表示・操作部11へ表示させることによって、ユーザーへどの方角へ向かえばルートへ復帰できるのかを予測しやすくさせている。
【0123】
しかし、その合成地図画像を車両の速度に応じたものにしなければ、ユーザーが不便に感じる場合が少なくない。例えば、ユーザーが車両を車速60km/h以上で走行させている場合に、制御部10が4枚の地図画像に基づく合成地図画像の全体を表示・操作部11へ表示させたとすると、車速が60km/h以上であるために、地図画像の自車位置マークaが4枚からなる合成地図画像を瞬く間に移動していくことが考えられ、自車位置マークaより先の地図画像が表示・操作部11において十分に表示されず、ユーザーがその予測をしにくくなるという事態が発生する。
【0124】
他方で、ユーザーが車両を車速が40km/h以下で走行させている場合に、制御部10が6枚の地図画像に基づく合成地図画像の全体を表示・操作部11へ表示させたとすると、車速が40km/h以下であるために、地図画像の自車位置マークaが1枚の地図画像をゆっくり移動していくことになる。この場合、ユーザーは現在走行しているエリアの地図画像の詳細を知りながらその予測をしたいと思うはずなのに、各地図画像が小さい6枚の合成地図画像の全体が表示・操作部11へ表示されて、ユーザーがその予測をしにくくなるという事態が発生する。
【0125】
本実施の形態によれば、ナビゲーションシステム100におけるリルート処理により時間がかかる間は、車載機1の制御部10は表示・操作部11へ表示する合成地図画像の画像枚数を車速に応じて変化させるので、ユーザーへどの方角へ向かえばルートへ復帰できるのかを予測しやすいくさせるのに適切な合成地図画像を表示することができる。
【0126】
<3.第3の実施の形態>
次に、第3の実施の形態について説明する。この第3の実施の形態は、上記第1の実施の形態と比較して、図9に示すS103において実施される画像合成処理に関して別の処理を行うようになっている。以下では、第1の実施の形態との相違点を中心に説明する。
【0127】
<画像合成処理>
本実施の形態は、車載機1の制御部10が、画像合成機能により、画像合成処理を実行する。本実施の形態は、制御部10が記憶部14に記憶している切出地図画像に基づいて走行しているエリアがどのようなエリアであるかを判断して、その判断結果に応じて合成する地図画像枚数を変化する。そのため、第1実施の形態では記憶部14に記憶させておく地図画像の枚数を4枚としていたが、本実施の形態においては、記憶部14に記憶させておく地図画像の枚数を6枚とし、走行エリアに応じて地図画像枚数の合成枚数を柔軟に変化できるようにしている。また、この機能を発揮するためにフローチャート図9のS105における地図画像記憶処理において、記憶部14に記憶して維持させる枚数を6枚とする。
【0128】
S103において、車載機1の制御部10が実施する本実施の形態における画像合成処理をフローチャート図14に基づいて説明する。
【0129】
S123において、制御部10は、記憶部14に記憶している切出地図画像に基づいて走行しているエリアがトンネルであるか否かを判断する。走行エリアがトンネルであると判断する場合はS124へ移行する。走行エリアがトンネルであると判断しない場合はS125へ移行する。
【0130】
S124において、車載機1の制御部10は、記憶部14に記憶されている6枚の地図画像のうち6枚の地図画像を合成処理する。図14のG8に示すように、M5からM10までの6枚の地図画像を合成する。地図画像の合成処理は、地図画像へ付与されている一意のアドレスデータに基づいて実行する。更に、制御部10は、図14のG8に示すように合成した地図画像の全体を表示させる際に不足する地図データcについては、黒くするなどして画像を加工する。
【0131】
S125において、制御部10は、記憶部14に記憶している切出地図画像に基づいて走行している現在位置から進行方向の所定距離内、例えば、10km以内に信号がないか否かを判断する。10km以内に信号がないと判断する場合はS126へ移行する。10km以内に信号がないと判断しない場合はS127へ移行する。
【0132】
S126において、車載機1の制御部10は、記憶部14に記憶されている6枚の地図画像のうち5枚の地図画像を合成処理する。図14のG7に示すように、M5からM9までの6枚の地図画像を合成する。地図画像の合成処理は、地図画像へ付与されている一意のアドレスデータに基づいて実行する。更に、制御部10は、図14のG7に示すように合成した地図画像の全体を表示させる際に不足する地図データcについては、黒くするなどして画像を加工する。
【0133】
S127において、車載機1の制御部10は、記憶部14に記憶されている6枚の地図画像のうち4枚の地図画像を合成処理する。図14のG8に示すように、M5からM8までの4枚の地図画像を合成する。地図画像の合成処理は、地図画像へ付与されている一意のアドレスデータに基づいて実行する。更に、制御部10は、図14のG6に示すように合成した地図画像の全体を表示させる際に不足する地図データcについては、黒くするなどして画像を加工する。
【0134】
S128〜S131の処理はフローチャート図11のS111〜S114と同じであるため説明を省略する。
【0135】
ユーザーが車両を設定ルートから逸脱させて走行させた場合は、データ提供装置である携帯端末2とサーバー3が連携してリルート処理を実行するが、リルート処理実行開始から車載機1が切出地図画像を取得して表示・操作部11へ表示するまでには、通信速度の遅延などの原因により時間がかかってしまうので、その間は、車載機1の制御部10は記憶部14に記憶されていた複数枚の地図画像のみを合成処理し、その合成した地図画像の全体を表示・操作部11へ表示させることによって、ユーザーへどの方角へ向かえばルートへ復帰できるのかを予測しやすくさせている。
【0136】
しかし、車両が走行するエリアに応じた合成地図画像にしなければ、ユーザーが不便に感じる場合が少なくない。例えば、ユーザーがトンネルで車両を走行させている場合に、制御部10が4枚の地図画像に基づく合成地図画像の全体を表示・操作部11へ表示させたとすると、走行エリアがトンネルであるために、地図画像の大半の領域がトンネルと山などの表示になることが考えられ、車両がトンネルを走行させて抜けた後の地図画像が足りず、ユーザーがその予測をしにくくなるという事態が発生する。
【0137】
また、ユーザーが現在位置から進行方向の所定距離内、例えば、10km以内に信号がない道路で車両を走行させている場合に、制御部10が4枚の地図画像に基づく合成地図画像の全体を表示・操作部11へ表示させたとすると、走行エリアが信号がない10kmの道路であるため車両の走行速度は比較的速くなる傾向がある。この場合に、車両の走行速度が比較的速いために、地図画像の自車位置マークaが4枚からなる合成地図画像を瞬く間に移動していくことが考えられ、自車位置マークaより先の地図画像が表示・操作部11において十分に表示されず、ユーザーがその予測をしにくくなるという事態が発生する。
【0138】
本実施の形態によれば、ナビゲーションシステム100におけるリルート処理により時間がかかる間は、車載機1の制御部10は表示・操作部11へ表示する合成地図画像の画像枚数を車両の走行エリアに応じて変化させるので、ユーザーへどの方角へ向かえばルートへ復帰できるのかを予測しやすいくさせるのに、適切な合成地図画像を表示することができる。
【0139】
<4.第4の実施の形態>
次に、第4の実施の形態について説明する。この第4の実施の形態は、上記第1の実施の形態と比較して、図9に示すS103において実施される画像合成処理に関して別の処理を行うようになっている。以下では、第1の実施の形態との相違点を中心に説明する。
【0140】
<画像合成処理>
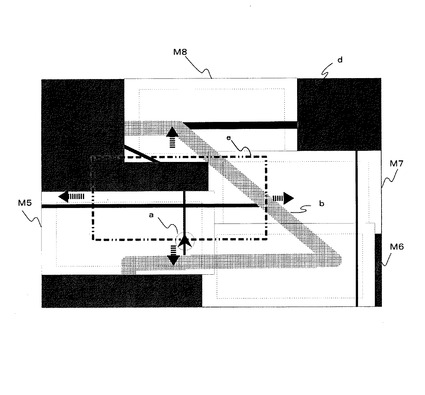
本実施の形態は、車載機1の制御部10が、画像合成機能により、画像合成処理を実行する。本実施の形態は、制御部10が表示・操作部11、又は、操作部22が受け付けたユーザ操作の操作量に応じて、記憶部14に記憶している複数の地図画像を合成した合成地図画像を表示・操作部11に表示するサイズに切出してそこへ表示させる。つまり、制御部10は表示・操作部11、又は、操作部22により受け付けたユーザー操作量に応じて表示・操作部11へ表示する合成地図画像をスクロール表示させる。例えば、制御部10は、図17に示すM5〜M8までの切出地図画像を合成し、この合成地図画像から、表示・操作部11に表示するサイズeを、制御部10が表示・操作部11、又は、操作部22が受け付けたユーザ操作の操作量に応じて切出して、表示・操作部11へ表示する。
【0141】
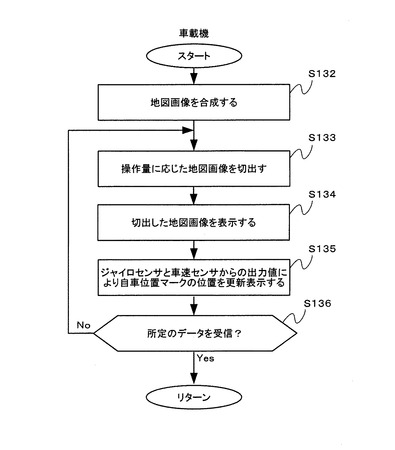
S103において、車載機1の制御部10が実施する本実施の形態における画像合成処理をフローチャート図16に基づいて説明する。
【0142】
S132において、制御部10は、記憶部14に記憶されている4枚の地図画像の地図画像を合成処理する。
【0143】
S133において、車載機1の制御部10は、制御部10が表示・操作部11、又は、操作部22が受け付けたユーザ操作の操作量に応じて、記憶部14に記憶している複数の地図画像を合成した合成地図画像を表示・操作部11のサイズに切出す。地図画像の合成処理は、地図画像へ付与されている一意のアドレスデータに基づいて実行する。更に、制御部10は、図14のG7に示すように合成した地図画像の全体を表示させる際に不足する地図データcについては、黒くするなどして画像を加工する。
【0144】
S134において、車載機1の制御部10は、切出した地図画像を表示・操作部11へ表示する。
【0145】
S135,S136の処理はフローチャート図11のS113,S114と同じであるため説明を省略する。
【0146】
ユーザーが車両を設定ルートから逸脱させて走行させた場合は、データ提供装置である携帯端末2とサーバー3が連携してリルート処理を実行するが、リルート処理実行開始から車載機1が切出地図画像を取得して表示・操作部11へ表示するまでには、通信速度の遅延などの原因により時間がかかってしまうので、その間は、車載機1の制御部10は記憶部14に記憶されていた複数枚の地図画像を合成処理し、その合成した地図画像の全体を表示・操作部11へ表示させることによって、ユーザーへどの方角へ向かえばルートへ復帰できるのかを予測しやすくさせている。
【0147】
しかし、その合成地図画像をユーザーの意図に応じたものにしなければ、ユーザーが不便に感じる場合が少なくない。例えば、ユーザーが車両を様々な速度で走行させることがあり、車両の速度を速めて現在走行しているエリアよりも先の地図を表示させてその予測をしたいと思う場合があり、他方で車両の速度を遅くして現在走行しているエリアの地図画像の詳細を知りながらその予測をしたいと思う場合がある。このような場合に、ユーザーの意思に応じた地図画像の表示ができずに、ユーザーがその予測をしにくくなるという事態が発生する。
【0148】
本実施の形態によれば、ナビゲーションシステム100におけるリルート処理により時間がかかる間は、車載機1の制御部10は表示・操作部11へ表示する合成地図画像の画像をユーザーの表示・操作部11、又は、操作部22が受け付ける操作量に応じて変化させるので、ユーザーへどの方角へ向かえばルートへ復帰できるのかをより予測しやすいくさせるのに適切な合成地図画像を表示することができる。
【0149】
<5.第5の実施の形態>
次に、第5の実施の形態について説明する。上記第1〜第4の実施の形態では、ナビゲーションシステムは、車載機1、データ提供装置である携帯端末2、及び、サーバー3を備えて構成されるとして説明したが、図18が示すような車載機1、及び、データ提供装置であるサーバー3を備えて構成される携帯端末2を備えないナビゲーションシステム101としても良い。
【0150】
この場合、車載機1とサーバー3との間で通信を行ってナビゲーション機能を実現する。車載機1にはサーバー3と通信を行ってナビゲーションに関するデータを送受信する通信部を備え、サーバー3には車載機1と通信を行ってナビゲーションに関するデータを送受信する通信部を備える。
【0151】
上記実施の形態においては、携帯端末2の制御部20が地図画像生成機能により地図画像切出し処理を実行するとして説明したが、この場合、サーバー3の制御部30がその処理を実行する。制御部20が座標データ算出機能により位置データに基づいて座標データを算出して車載機1へ送信処理を実行すると説明したが、この場合、車載機1の制御部10がその処理を実行する。制御部20がルート逸脱判定機能により座標データが切出地図画像、又は、ルート周辺地図画像に含まれるルートを逸脱したか否かを判定し、逸脱した場合にサーバー3へ逸脱通知を送信する処理を実行すると説明したが、この場合、車載機1の制御部10がその処理を実行する。また、制御部20がマップマッチング機能により車載機1から取得した車両情報に基づいてマップマッチング処理を実行すると説明したが、この場合、車載機1の制御部10がその処理を実行する。
【0152】
第5の実施の形態においては、GPS通信部は、車載機1に備わり車載機1の制御部10はGPS通信部により受信した車両の現在位置データを所定のタイミングで座標データへ算出する処理を実行する。
【0153】
車載機1の制御部10はこの算出した座標データに基づいて前述の各機能を実現する。
【0154】
第5の実施の形態のナビゲーションシステムにおいては、サーバー3がナビゲーションに関するデータを車載機1へ提供する。従って、サーバー3のみが、ナビゲーションに関するデータを車載機1へ提供するデータ提供装置となる。
【0155】
なお、本実施の形態のサーバー3と同様の機能を携帯端末2が備えていてもよい。この場合は、携帯端末2のみがナビゲーションに関するデータを車載機1へ提供するデータ提供装置となる。
【0156】
<6.変形例>
以上、本発明の実施の形態について説明してきたが、この発明は上記実施の形態に限定されるものではなく様々な変形が可能である。以下では他の実施の形態について説明する。もちろん、以下で説明する形態を適宜組み合わせても良い。
【0157】
上記第1及び第2実施の形態では、ナビゲーションシステムにおいて、GPS通信部は携帯端末2に備わっているものとして説明を行ったが、GPS通信部は車両側に備わっていても良い。この場合、車載機1の制御部10はGPS通信部と通信可能に接続され、GPS通信部により受信した信号に基づいて車両の現在の位置データを導出し、導出した一データを所定のタイミングで携帯端末2へ送信する。この位置データは、携帯端末2の近距離無線通信部21が受信することで携帯端末2に取得される。携帯端末2の制御部20はこの受信した位置データに基づいて座標データを算出し、所定のタイミングで座標データを車載機1へ送信する。車載機1の制御部10は、表示・操作部11へ表示する地図画像上の自車位置マークaをこの座標データに基づいて更新表示する。また、携帯端末2の制御部20は、所定のタイミングで車載機1から位置データ受信し、この位置データに基づいてルート逸脱判定処理を実行する。リルート処理を実行している間は、GPS通信部により得られた信号に基づいて位置データを導出し、導出した位置データに基づいて合成地図画像において自車位置マークaを更新表示させることができる。
【0158】
また、上記実施の形態では、携帯端末2から車載機1へ座標データが車両の現在の位置データとして送信されていたが、携帯端末2において自車位置マークaのみを含む画像を位置データとして携帯端末2から送信し、車載機1はその画像を一つのレイヤーとして地図画像に重畳するようにしてもよい。
【0159】
また、上記実施の形態では、プログラムに従ったCPUの演算処理によってソフトウェア的に各種の機能が実現されると説明したが、これら機能のうちの一部は電気的なハードウェア回路により実現されても良い。また逆に、ハードウェア回路によって実現されるとした機能のうちの一部は、ソフトウェア的に実現されても良い。
【0160】
更に、各実施例の制御を説明するフローチャート図における各処理は、便宜上一の系列で示しているが、各制御部が各処理を並列に処理し、又は、優先順位が設定されて処理するようなものであっても良い。例えば、車載機1の制御部10が実行する自車位置マーク更新処理と、地図画像更新処理とが図9に示す順に実行される必要はなく、各処理に設定された周期で実行されるものでもあっても良く、設定された優先順位に基づいて実行されるものであっても良く、又は、所定のイベントが発生した場合に実行され各処理後の制御を各制御部が各機能の目的を達成するように調停を行うものであっても良い。
【符号の説明】
【0161】
1 車載機
2 携帯端末
3 サーバー
4 GPS衛星
10 制御部
11 表示・操作部
15 近距離無線通信部
20 制御部
21 近距離無線通信部
27 GPS通信部
28 通信部
33 記憶部
34 通信部
【技術分野】
【0001】
本発明は、車両に搭載される車載機へ地図画像をデータ提供装置から提供することによりナビゲーション機能を実現する技術に関する。
【背景技術】
【0002】
全地球測位システム(GPS = Global Positioning System)を用いて、現在、車両が地球上のどこにいるのかを示す位置データを算出し、この位置データに基づいて自車位置マークを地図画像へ重畳処理したものを車載機のディスプレイに表示させるカーナビゲーションシステムが知られている。図1はこのカーナビゲーションシステムを示す構成図である。車載機は自動車5などの車両に搭載されている。位置データは、車載機において受信する3つ以上のGPS衛星4が発する電波に基づいて算出される。自車位置マークaと地図画像の重畳処理は、図2が示すように、ディスプレイに表示させた地図画像の所定位置に自車位置マークaを固定表示させ、自車位置マークaを現在位置とし、車両の移動によって変化する位置データに応じて地図画像を更新表示する。つまり、車両の移動に応じた周辺地図を更新表示することで、自車位置マークaが移動しているかのような表示を行う。例えば、図2の地図画像G1からG2へ、G2からG3へと地図画像を更新表示する。
【0003】
また、携帯電話やPDA(Personal Digital Assistant)といった携帯端末の性能向上に伴い、これらの携帯端末においてもGPSを用いたナビゲーションシステムが実現されている。このようなナビゲーションシステムでは、携帯端末と、携帯端末と無線通信を行うサーバーとの間において、その機能分担を行っている。機能分担について、例えば、携帯端末が、位置データ取得機能、目的地設定機能、マップマッチング機能、及び、表示機能などを担当し、サーバーが、地図画像蓄積機能、ルート検索機能、及び、地図画像切出し機能などを担当している。このように機能分担を行うことによって、資源が分散・共有されコストの低減を図っている。
【0004】
しかし、カーナビゲーションシステムを搭載した車両へ、ナビゲーションシステム搭載の端末を携帯したユーザーが乗車すると、ナビゲーション機能を実現する資源が重複することになってしまう。この資源の重複を解消し資源の有効活用を図るシステムとして、車載機、携帯端末、及び、サーバーにおいて、その資源を分散しつつナビゲーションに必要なデータを相互に共有するカーナビゲーションシステムが提案されている。例えば、特許文献1に、車載機が携帯電話経由の通信によりサーバーからカーナビゲーションに用いる地図画像を取得する技術が開示されている。
【0005】
このようなシステムにおいて、携帯端末とサーバー間のデータ通信、及び、携帯端末と車載機間のデータ通信は、無線通信、又は、有線通信によって行われるが、それらの通信速度が十分でない場合には、地図画像に自車位置マークaを適切な位置へ重畳できないことがある。例えば、車両が車速40km以上で高速移動することによって、車載機搭載のGPS通信部から取得する位置データが瞬く間に変化する場合に、データ量が比較的大きい地図画像の取得処理が通信速度の遅延などにより遅れ、自車位置マークaに適切な地図画像を車載機の表示部へ重畳表示することができない。つまり、車載機の表示部に表示する地図画像と自車位置マークaの位置との関係に整合性がなく、カーナビゲーションシステムとしての機能を十分に発揮できない虞がある。 そこで、従来のような、現在位置を示す自車位置マークaを固定的に表示して現在位置周辺の地図画像を更新表示させるものとは逆に、地図画像を固定的に表示して維持しつつその地図画像に対して移動するように自車位置マークaを更新表示することが考えられる。この場合は、自車位置マークaが表示されている地図を移動して外れる場合にのみ地図画像を更新表示すればよく、地図画像を頻繁に更新する必要がない。つまり、車載機1において地図画像の取得に関して大きな遅れはなくなり、車載機に表示する地図画像と自車位置マークaとの位置関係に整合を図ることができる。
【0006】
また、地図画像の更新タイミングも適切に行うことによって、更にその整合を図れるようにしている。具体的には、車載機は現在位置と目的地に基づいて設定したルート周辺の地図画像から切出した複数の切出地図画像を、携帯端末、及び、サーバーから先読取得して、複数の地図画像を車載機の記憶部へ予め記憶しておく。つまり、地図画像更新の際には、次の地図画像がその更新の際よりも前に車載機の記憶部に記憶されているので、地図画像の更新が遅れるということはなく、それらの整合を確実に図ることができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平2002−107169号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、車両が設定したルートから外れて走行した場合は、車載機の表示部へ表示されている地図画像は目的地までの案内画像としては適切なものではない。このため、上記のような外部のデータ提供装置(上記の例では、携帯端末及びサーバー)から車載機にナビゲーションに係るデータが提供される(上記の例では、無線通信によりデータが送信される)ナビゲーションシステムにおいては、車両がルートから外れた場合は、データ提供装置においてリルート処理がなされ、現在位置と目的地に基づいて新たなルートが取得される。そして、車載機に対して、データ提供装置から新たなルートを含む地図画像が提供される。
【0009】
しかし、車載機は、データ提供装置でのリルート処理時間や、装置相互間(例えば、携帯端末とサーバーとの間、あるいは、携帯端末と車載機との間)の通信遅れなどが原因で複数の地図画像の取得処理に時間がかかってしまい、リルート処理がなされると、新たなルートを含む地図画像の表示までに時間がかかってしまう。このため、表示部においては、車両の現在位置から目的地までのルートを案内する地図画像を表示することができない。つまり、車載機は、リルート処理を行っている間は、ルートから外れて走行し当初のルートへ復帰したいと思うユーザに対し、リルート処理する前の不適切な地図画像を表示部へ表示させてしまっており、ユーザーは車両を当初のルートから益々外れて走行させてしまう虞がある。
【0010】
本発明は、上記課題に鑑みてなされたものであり、ユーザーがリルート処理中にいずれの方角へ向かえば当初のルートへ復帰できるかを予測しやすい技術を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記課題を解決するため、請求項1の発明は、車両に搭載されて表示手段を有する車載機と、ナビゲーションに関するデータを前記車載機へ提供するデータ提供装置とを有するナビゲーションシステムであって、前記データ提供装置は、前記車両の現在位置を取得する現在位置取得手段と、前記車両の目的地までのルートを取得する第1ルート取得手段と、前記現在位置が前記ルートから逸脱した場合に、該現在位置から前記目的地までの新たなルートを再取得する第2ルート取得手段と、前記車載機の前記表示手段の画面に合わせたサイズの、前記ルートの案内に用いる複数の地図画像を生成する地図画像生成手段と、 生成された前記複数の地図画像を前記車載機に順次送信する送信手段と、を備え、 前記車載機は、前記データ提供装置から前記複数の地図画像を順次受信する受信手段と、前記受信手段において受信済の地図画像を記憶する記憶手段と、前記現在位置が前記ルートから逸脱したことを検知する検知手段と、前記現在位置が前記ルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を前記表示手段に表示させ、前記現在位置が前記ルートから逸脱したことを検知される場合は前記記憶手段に記憶された複数の地図画像を用いた案内画面を前記表示手段に表示させる表示制御手段と、を備える。
【0012】
また、請求項2の発明は、請求項1に記載のナビゲーションシステムにおいて、前記表示手段は、前記現在位置が前記ルートから逸脱したことを検知される場合は、前記記憶手段に記憶されている複数の地図画像の合成画像の全体を前記表示手段に表示させる。
【0013】
また、請求項3の発明は、請求項2に記載のナビゲーションシステムにおいて、前記車載機は、ユーザ操作を受け付ける操作手段、を更に備え、前記表示手段は、前記現在位置が前記ルートから逸脱したことを検知される場合は、前記記憶手段に記憶された複数の地図画像の合成地図画像の一部を前記表示手段に表示させ、前記ユーザ操作に応じてスクロールさせて前記合成地図画像の他の一部を前記表示手段に表示させる。
【0014】
また、請求項4の発明は、請求項1ないし3のいずれかに記載のナビゲーションシステムにおいて、車載機は、前記車両の走行速度を入力する入力手段、を更に備え、前記表示手段は、前記現在位置が前記ルートから逸脱したことを検知された場合に、前記案内画面に用いる前記地図画像の数を前記走行速度に応じて決定する。
【0015】
また、請求項5の発明は、請求項1ないし3のいずれかに記載のナビゲーションシステムにおいて、車載機は、前記地図画像に基づいて前記車両が走行中の走行エリアを判定する判定手段、を更に備え、前記表示手段は、前記現在位置が前記ルートから逸脱したことを検知された場合に、前記案内画面に用いる前記地図画像の数を走行エリアに基づいて決定する。
【0016】
また、請求項6の発明は、請求項1ないし5のいずれかに記載のナビゲーションシステムにおいて、前記車載機は、前記車両の現在位置を前記データ提供装置から受信する位置受信手段と、前記車両に設けられる外部装置からの信号に基づいて前記車両の現在位置を導出する導出手段と、を更に備え、前記表示制御手段は、前記現在位置が前記ルートから逸脱したことを検知されない場合は、前記データ提供装置から受信した現在位置に基づいて前記案内画面中に自車位置マークを表示し、前記現在位置が前記ルートから逸脱したことを検知された場合は、前記導出された現在位置に基づいて前記案内画面中に自車位置マークを表示させる。
【0017】
また、請求項7の発明は、車両に搭載され、データ提供装置からナビゲーションに関するデータの提供を受けて表示手段に案内画面を表示する車載機であって、前記データ提供装置は、前記車両の現在位置が所定のルートから逸脱した場合に、該現在位置から目的地までの新たなルートを再取得するものであり、前記データ提供装置から、前記表示手段の画面に合わせたサイズの、前記ルートの案内に用いる複数の地図画像を順次に受信する受信手段と、前記受信手段において受信済の地図画像を記憶する記憶手段と、前記車両の現在位置が前記ルートから逸脱したことを検知する検知手段と、前記車両の現在位置が前記ルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を前記表示手段に表示させ、前記現在位置が前記ルートから逸脱したことを検知された場合は前記記憶手段に記憶された複数の地図画像を用いた案内画面を前記表示手段に表示させる表示制御手段と、を備える。
【0018】
また、請求項8の発明は、車両に搭載されて表示手段を有する車載機と、ナビゲーションに関するデータを前記車載機へ提供するデータ提供装置とを有するナビゲーションシステムにおけるナビゲーション方法であって、前記データ提供装置が、前記車両の現在位置を取得するステップと、前記データ提供装置が、前記車両の目的地までのルートを取得するステップと、前記データ提供装置が、前記現在位置が前記ルートから逸脱した場合に、該現在位置から前記目的地までの新たなルートを再取得するステップと、前記データ提供装置が、前記車載機の前記表示手段の画面に合わせたサイズの、前記ルートの案内に用いる複数の地図画像を生成するステップと、前記データ提供装置が、生成された前記複数の地図画像を前記車載機に順次送信するステップと、前記車載機が、前記データ提供装置から前記複数の地図画像を順次受信するステップと、前記車載機が、受信済の地図画像を記憶手段に記憶するステップと、前記車載機が、前記現在位置が前記ルートから逸脱したことを検知するステップと、前記車載機が、前記現在位置が前記ルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を前記表示手段に表示させるステップと、前記車載機が、前記現在位置が前記ルートから逸脱したことを検知される場合は前記記憶手段に記憶された複数の地図画像を用いた案内画面を表示手段に表示させるステップと、を実行する。
【0019】
また、請求項9の発明は、車両に搭載され、データ提供装置からナビゲーションに関するデータの提供を受けて表示手段に案内画面を表示する車載機に含まれるコンピュータによって実行可能なプログラムであって、前記データ提供装置は、前記車両の現在位置が所定のルートから逸脱した場合に、該現在位置から目的地までの新たなルートを再取得するものであり、前記プログラムの前記コンピュータによる実行は、前記コンピュータに、前記データ提供装置から前記表示手段の画面に合わせたサイズの、前記ルートの案内に用いる複数の地図画像を順次に受信するステップと、受信済の地図画像を記憶手段に記憶するステップと、前記車両の現在位置が前記ルートから逸脱したことを検知するステップと、前記車両の現在位置が前記ルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を前記表示手段に表示させるステップと、前記現在位置が前記ルートから逸脱したことを検地される場合は前記記憶手段に記憶された複数の地図画像を用いた案内画面を前記表示手段に表示させるステップと、を実行させる。
【発明の効果】
【0020】
請求項1ないし8の発明によれば、車載機は、現在位置がルートから逸脱したことを検知され、ルート再取得を行っている間、記憶手段に記憶された複数の地図画像のみを用いた案内画面を表示手段に表示させるため、ユーザーは比較的広域な地図を示す案内画面を確認でき、いずれの方角へ向かえばルートへ復帰できるかを予測しやすい。
【0021】
また、特に請求項2の発明によれば、車載機は、現在位置がルートから逸脱したことを検知され、ルート再取得を行っている間、記憶手段に記憶された複数の地図画像のみを用いた案内画面を表示手段に表示させるため、ユーザーは複数の地図画像の合成地図画像全体を一目で確認でき、いずれの方角へ向かえばルートへ復帰できるかを予測しやすい。
【0022】
また、特に請求項3の発明によれば、車載機は、現在位置がルートから逸脱したことを検知され、ルート再取得を行っている間、記憶手段に記憶された複数の地図画像のみの合成地図画像の一部を表示手段に表示させ、ユーザ操作に応じてスクロールさせて合成地図画像の他の一部を表示手段に表示させるため、ユーザーは比較的広域な地図を示す案内画面を確認でき、いずれの方角へ向かえばルートへ復帰できるかを予測しやすい。
【0023】
また、特に請求項4の発明によれば、車載機は、現在位置がルートから逸脱したことを検知され、ルート再取得を行っている間、記憶手段に記憶された複数の地図画像のみを用いた案内画面を表示手段に表示させるとともに、案内画面に用いる地図画像の数を走行速度に応じて決定するので、案内画面に必要な情報量が適切なものに調整され、ユーザはいずれの方角へ向かえばルートへ復帰できるかを予測しやすい。
【0024】
また、特に請求項5の発明によれば、車載機は、現在位置がルートから逸脱したことを検知され、ルート再取得を行っている間、記憶手段に記憶された複数の地図画像のみを用いた案内画面を表示手段に表示させるとともに、案内画面に用いる地図画像の数を走行エリアに応じて決定するので、走行エリアの特性に応じて必要な情報量が適切なものに調整され、ユーザはいずれの方角へ向かえばルートへ復帰できるかを予測しやすい。
【0025】
また、特に請求項6の発明によれば、車載機は、現在位置がルートから逸脱したことを検知され、ルート再取得を行っている間、車両に設けられる外部装置からの信号に基づいて導出手段により導出された現在位置に基づいて案内画面中に自車位置マークを更新表示させるため、データ提供装置から現在位置データを受信しなくてもユーザはどこを走行しているかを認識できる。
【図面の簡単な説明】
【0026】
【図1】図1は、ナビゲーションシステムの構成を説明する図である。
【図2】図2は、ナビゲーションシステムの構成を説明する図である。
【図3】図3は、ナビゲーションシステムにおける表示地図画像を示す図である。
【図4】図4は、車載機のシステムブロック図である。
【図5】図5は、携帯端末のシステムブロック図である。
【図6】図6は、サーバーのシステムブロック図である。
【図7】図7は、ナビゲーションシステムの動作を示すフローチャート図である。
【図8】図8は、ナビゲーションシステムにおけるルート周辺地図画像を示す図である。
【図9】図9は、ナビゲーションシステムの動作を示すフローチャート図である。
【図10】図10は、ナビゲーションシステムにおけるルート周辺地図画像を示す図である。
【図11】図11は、ナビゲーションシステムの動作を示すフローチャート図である。
【図12】図12は、ナビゲーションシステムにおける表示地図画像を示す図である。
【図13】図13は、ナビゲーションシステムの動作を示すフローチャート図である。
【図14】図14は、ナビゲーションシステムにおける表示地図画像を示す図である。
【図15】図15は、ナビゲーションシステムの動作を示すフローチャート図である。
【図16】図16は、ナビゲーションシステムの動作を示すフローチャート図である。
【図17】図17は、ナビゲーションシステムにおける表示地図画像を示す図である。
【図18】図18は、ナビゲーションシステムの構成を説明する図である。
【発明を実施するための形態】
【0027】
以下、添付図面を参照しながら本発明の実施の形態について説明する。
【0028】
<実施の形態>
<1.第1の実施の形態>
<1.1ナビゲーションシステムの構成>
図3は、第1の実施の形態のナビゲーションシステム100を示す構成図である。ナビゲーションシステム100は、自動車5などの車両に搭載される車載機1、並びに、データ提供装置である携帯端末2及びサーバー3により構成される。車載機1は携帯端末2と、例えば、Bluetooth(登録商標)規格に基づく近距離無線通信を行ってナビゲーションに関するデータなどを送受信する。通信はUSB接続などによる有線通信を利用しても良い。携帯端末2は車載機1と近距離無線通信を行ってナビゲーションに関するデータなどを送受信し、GPS衛星4と無線通信を行って現在位置を測定するためのデータなどを受信する。更に、携帯端末2は、サーバー3と無線通信を行ってナビゲーションに関するデータなどを送受信する。GPS衛星4は携帯端末2と無線通信を行って現在位置を測定するためのデータなどを送信する。サーバー3は携帯端末2と無線通信を行ってナビゲーションに関するデータなどを送受信する。ナビゲーションシステム100は、このような通信により取得したナビゲーションに関するデータに基づいて、車載機1、携帯端末2、及び、サーバー3が後述するナビゲーション機能を実現する。
【0029】
本実施の形態のナビゲーションシステム100においては、携帯端末2及びサーバー3が連携して動作し、ナビゲーションに関するデータを車載機1へ提供する。従って、携帯端末2とサーバー3とを組み合わせたものが、ナビゲーションに関するデータを車載機1へ提供するデータ提供装置であるともいえる。
(システムブロック図)
(車載機)
図4は、車載機1のシステムブロック図である。車載機1は、ナビゲーション機能、又は、楽曲再生機能などを実現するために種々の制御を行う制御部10、目的地までのルートを強調表示して目的地まで案内する案内画面となる地図画像などを表示するとともにユーザー操作を受け付ける表示・操作部11(例えば、タッチパネル)、その他のユーザー操作を受け付ける操作部12、楽曲や操作時の効果音などを出力する音出力部13、制御に必要なデータを記憶する記憶部14(例えば、Flash Memory)、所定距離内、例えば、半径10−100m以内の通信相手とBluetooth(登録商標)規格に従って通信可能な近距離無線通信部15、及び、入出力部16(I/F)を備える。入出力部16は、車載ネットワーク8(例えば、Control Area Netowork)に接続された車両の回転を検出する回転検出部6(例えば、ジャイロセンサ)、及び、車両の移動速度を検出する車速検出部7(例えば、車速センサ)などからの検出値を示す信号を車載ネットワークを介して受信する。回転検出部6及び車速検出部7は、車両において車載機1とは別に設けられた外部装置である。
【0030】
ナビゲーション機能を実現する際には、案内画面は、表示・操作部11に表示する。また、携帯端末2から提供される地図画像や位置データなどのナビゲーションに関するデータは近距離無線通信部15によって受信され、車載機1から携帯端末2へ送信するナビゲーションに関するデータも近距離無線通信部15によって送信する。
【0031】
制御部10は、CPU等を備えたマイクロコンピュータにより構成する。制御部10は、所定のメモリ(例えば、ROM)に記憶されたプログラムに従ってCPUが演算処理を行うことでナビゲーションシステムに関する機能を実現する。このプログラムは、予め記憶部14などに記憶されるものであるが、外部サーバとの通信やプログラムを記憶した記録媒体の読み取りなどにより更新可能となっていてもよい。
【0032】
制御部10が実現するナビゲーション機能の主なものには次の(A)〜(G)がある。
【0033】
(A)制御部10が、近距離無線通信部15によって受信された地図画像と位置データとに基づいて地図画像の適切な位置に自車位置マークaを表示・操作部11へ重畳表示する重畳表示機能。
【0034】
(B)制御部10が、記憶部14に記憶されている複数の地図画像を合成する画像合成機能。
【0035】
(C)制御部10が、表示・操作部11における自車位置マークaの表示位置を近距離無線通信部15により、所定周期で受信した座標データに基づいて更新表示する自車位置マーク更新機能。
【0036】
(D)制御部10が、自車位置マークaの表示位置を入出力部16により受信した回転検出部6や車速検出部7からの検出値に基づいて更新表示する自律航法表示機能。
【0037】
(E)制御部10が、携帯端末2から受信した切出地図画像の枚数を所定の枚数に維持して記憶部14へ記憶する制御を行う地図画像記憶機能。
【0038】
(F)制御部10が、表示・操作部11へ表示している切出地図画像における所定の更新位置に座標データが含まれるようになった場合に次に表示すべき切出地図画像を更新表示する地図画像更新機能。
【0039】
(G)制御部10が、表示・操作部11へ表示している切出地図画像における目的地に座標データが含まれるようになった場合にナビゲーションを終了させる案内終了判定新機能。
【0040】
なお、これらの機能の詳細については後述する。
【0041】
また、制御部10は、後述するナビゲーション機能を実現するために必要なステップを実行するため車載機1の各部の制御を行う。
(携帯端末)
図5は、携帯端末2のシステムブロック図である。携帯端末2は、通話機能、及び、ナビゲーション機能などを実現するために種々の制御を行う制御部20、通話をする際に電話番号などを表示する表示部21、ユーザー操作を受け付ける操作部22、通話の際に通話相手の音声、操作時の効果音、若しくは、Eメール着信時の着信音などを出力する音出力部23、通話の際に通話相手と話す音声を入力する音入力部24、制御に必要なデータを記憶する記憶部25(例えば、Flash Memory)、無線通信により他の携帯端末と通話するために通話データを送受信する通話通信部26、GPS衛星4から発信される信号を受信するGPS通信部27、無線通信によりサーバーとナビゲーションに関するデータなどを送受信する通信部28、及び、所定距離内、例えば、半径10−100m以内の通信相手とBluetooth(登録商標)規格に従ってデータ通信可能な近距離無線通信部29を備える。
【0042】
本実施の形態のナビゲーションシステム100が機能する場面においては、携帯端末2はユーザ(車両のドライバ)が携帯しているものであるため、車両内に位置している。従って、GPS通信部27は、車両の現在の位置データとなる現在位置データを取得する。
【0043】
制御部20は、CPU等を備えたマイクロコンピュータにより構成する。制御部20は、所定のメモリ(例えば、ROM)に記憶されたプログラムに従ってCPUが演算処理を行うことで、ナビゲーションに関する機能を実現する。このプログラムは、予め記憶部25などに記憶されるものであるが、外部サーバとの通信やプログラムを記憶した記録媒体の読み取りなどにより更新可能となっていてもよい。
【0044】
制御部20が実現するナビゲーション機能の主なものには次の(H)〜(K)がある。
【0045】
(H)サーバー3から受信したルート周辺地図画像から車載機1の表示・操作部11へ表示可能な地図画像を切出す切出地図画像生成機能(以降、切出地図画像という)。
【0046】
(I)制御部20がGPS通信部27により受信した位置データに基づいて地図画像の座標のどこに自車位置マークaが位置するかを算出する座標算出機能。
【0047】
(J)制御部20が地図画像の適切な位置へ重畳表示できるように座標データを補正するマップマッチグ機能。
【0048】
(K)制御部20が座標データが地図画像に含まれるルートを逸脱したか否かを判定するルート逸脱判定機能。
【0049】
なお、これら機能の詳細については後述する。
【0050】
また、制御部20は、後述するナビゲーション機能を実現するために必要なステップを実行するために、携帯端末2の各部の制御を行う。
(サーバー)
図6は、サーバー3のシステムブロック図である。サーバー3は、ナビゲーション情報などのコンテンツ提供機能を実現するために種々の制御を行う制御部30、制御に必要な設定、若しくは、制御プログラムや制御データのメンテナンスなどを行うために管理者の操作を受け付ける操作部31、設定画面、若しくは、メンテナンス画面などを表示する表示部32、地図画像などのコンテンツを蓄積する記憶部33、及び、無線通信により携帯端末2とナビゲーションに関するデータなどを送受信する通信部34を備える。
【0051】
制御部30は、CPU等を備えたマイクロコンピュータにより構成する。制御部30は、所定のメモリ(ROM)に記憶されたプログラムに従ってCPUが演算処理を行うことで、ナビゲーションに関する機能を実現する。
【0052】
制御部30が実現するナビゲーション機能の主なものには次の(L)〜(M)がある。
【0053】
(L)車両の現在位置データと目的地データとに基づいてルートを作成するルート作成機能(車両がルートから外れた場合に、新たなルートを作成する機能を含む。)。
【0054】
(M)作成したルート全体の周辺の地図画像を記憶部33から切出すルート周辺画像作成機能。
【0055】
なお、これら機能の詳細については後述する。
【0056】
また、制御部30は、後述するナビゲーション機能を実現するために必要なステップを実行するために、サーバー3の各部の制御を行う。
【0057】
<1.2ナビゲーションシステム制御処理>
<携帯連携制御処理>
(車載機)
車載機1が備える制御部10が実行する制御処理を説明する。制御部10は、ユーザーにより車両のイグニッションキーが操作されACC(アクセサリー)がONにされた場合に、電源(バッテリー)から電力が供給され、種々の制御処理を実行可能な状態になる。制御部10が種々の制御処理を実行可能な状態になると、表示・操作部11、又は、操作部12においてユーザーが操作した内容に応じた制御処理を実行する。例えば、車載機1はナビゲーション機能、楽曲再生機能、又は、携帯連携機能などの種々の機能をユーザーが選択可能にするためのメニューを表示・操作部11へ表示し、ユーザーがこのメニューのうち携帯連携機能を選択した場合は、制御部10は携帯連携機能を実現するための制御処理を実行する。
【0058】
携帯連携機能を実現するためには携帯端末2やサーバー3との通信を確立するためにペアリング制御を実行する必要がある。ここで、ペアリング制御とは、携帯端末2の制御部20が近距離無線通信部21を制御して車載機1の近距離無線通信部15と無線通信を確立させ、更に、制御部20が通信部28を制御してサーバー3の通信部34と無線通信を確立させる制御をいう。
【0059】
車載機1の制御部10は、ペアリング制御が確立した後は、複数のコンテンツ提供サービスメニューを表示・操作部11へ表示する。例えば、メニューには、ナビゲーション提供サービス、楽曲提供サービス、又は、ニュース提供サービスなどがある。ナビゲーションサービスが選択された場合は、車載機1の制御部10が選択されたナビゲーションシステムを携帯端末2及びサーバー3と連携して実行する。
(携帯端末)
携帯端末2が備える制御部20が実行する制御処理を説明する。制御部20は、ユーザーにより携帯端末に備わる電源ボタンがONにされた場合に、電源(バッテリー)から電力が供給されて種々の制御処理を実行可能な状態になる。制御部20が種々の制御処理を実行可能な状態になると、ユーザーが操作部22を操作した内容に応じた制御処理を実行する。例えば、携帯端末2は通話機能、インターネット閲覧機能、又は、携帯連携機能など種々の機能を操作部22においてユーザーが操作可能にされている。ユーザーがこの操作部22により携帯連携機能を選択した場合は、制御部20は携帯連携機能を実現するためにペアリング制御処理を実行する。
【0060】
制御部20は、ペアリング制御を確立させた後に、車載機1においてナビゲーションサービスが選択された場合は、ナビゲーション提供サービスを車載機1及びサーバー3と連携して実行する。
(サーバー)
サーバー3が備える制御部30が実行する制御処理を説明する。制御部30は管理者によりサーバー3に備わる電源ボタンが操作されONにされた場合に、電源(商用電源)からの電力が供給されて種々の制御処理を実行可能な状態になる。制御部30が種々の制御処理を実行可能な状態になると、管理者が操作部31を操作した内容に応じた制御処理、又は、コンテンツ提供制御処理を実行する。つまり、管理者の操作部31の操作によりコンテンツ提供制御処理の実行が選択されると、制御部30は車載機1や携帯端末2などのクライアントからの要求に応じて地図画像などのコンテンツを提供する。クライアントである携帯端末2から携帯連携機能を実現するためにペアリング制御の実行要求があると、この要求に応じてペアリング制御を実行する。
【0061】
制御部30は、ペアリング制御を確立させた後に、車載機1においてナビゲーションサービスが選択された場合は、ナビゲーション提供サービスを携帯端末2及びサーバー3と連携して実行する。
【0062】
以降、車載機1の表示・操作部11に表示されたコンテンツ提供サービスメニューのうち、ユーザーによってナビゲーション提供サービスが選択された場合の車載機1、携帯端末2、及び、サーバー3の制御を説明する。
【0063】
<1.2.1ナビゲーション制御処理>
図7において、ナビゲーションシステム100が実行するナビゲーション提供サービスを説明する。
【0064】
S100において、制御部10は表示・操作部11へ目的地設定画面を表示する。目的地設定画面はユーザーが行きたい場所を入力可能な画面である。この画面においてユーザーにより目的地が入力され決定ボタンが操作されると、車載機1は携帯端末2へその目的地データを送信する。
【0065】
S200において、携帯端末2の制御部20は車載機1から受信した目的地データをサーバー3へ送信する。
【0066】
さらに、S201において、制御部20は携帯端末2が備えるGPS通信部27から受信して測定した位置データをサーバー3へ送信する。
【0067】
<ルート作成処理>
S300において、サーバー3の制御部30はルート作成機能により、受信した目的地データ、位置データ、及び、記憶部33(地図画像ベース)に記憶されている地図画像に基づいて走行ルートを作成する。ルートの作成は、例えば、地図画像の現在位置から目的地までに存在する道路に関連付けられている特性を参照し、各ルートのコンセプトに応じた道路を組み合わせることにより実現する。
【0068】
<ルート周辺画像作成処理>
S301において、サーバー3の制御部30はルート周辺画像作成機能により、作成したルート全体の周辺の地図画像を記憶部33から切出す。例えば、図8に示すルート周辺地図画像1000のようなものである。
【0069】
S302において、サーバー3の制御部30は切出したルート周辺地図画像1000を携帯端末2へ送信し、Cへ移行する。Cへ移行すると、フローチャート図9に示すS303以降の処理を実行する。
【0070】
<地図画像切出処理>
S202において、携帯端末2の制御部20は、地図画像生成機能により、受信したルート周辺地図画像1000を記憶部25へ記憶させ、記憶させたルート周辺地図画像から、車載機1の表示・操作部11へ表示するのに適したサイズの地図画像を切出して生成する。このような処理をする理由は、ルート周辺地図画像1000は、ルートの全体を含むものであるため、車載機1の表示・操作部11への表示するにはサイズが大きすぎて適さないからである。この処理によって、ルートに沿った互いに範囲の異なる複数の地図画像が切り出されることになる。
【0071】
例えば、制御部20は、図8のルート周辺地図画像1000において地図画像M1〜M19を切出し、車載機1の表示・操作部11において表示可能にする。
【0072】
この切出地図画像の切出し方法を具体的に説明する。制御部20が次の処理を実行する。制御部20は、ルート周辺地図画像1000から、次の条件を満たすように始めの切出地図画像M1を切出す。ルート上のスタート位置を含める(第1条件)。切出す地図画像量を、車載機1の表示・操作部11へ表示するのに適したデータ量とする(第2条件)。地図方向を北が上方になるような地図方向とする(第3条件)。そのスタート位置を切出地図画像M1の下方とする(第4条件)。そのスタート位置を切出地図画像M1の左右方向の略中央にする(第5条件)。
【0073】
次に制御部20は、ルート周辺地図画像1000から、次の条件を満たすように次の切出地図画像M2を切出す。一つ前の切出地図画像M1の周辺の更新領域c(後述)とルートが重なる位置をスタート位置とし、このスタート位置を含める(第1条件)。地図画像量を、車載機1の表示・操作部11へ表示するのに適したデータ量とする(第2条件)。地図方向を北が上方になるような地図方向とする(第3条件)。そのスタート位置を、更新領域が縦方向の場合は切出地図画像の縦方向の縁とし、更新領域が横方向の場合は横方向の縁とする(第4条件)。第4条件においてそのスタート位置が切出地図画像の縦方向の縁の場合は、そのスタート位置を上下略中央にし、そのスタート位置が切出地図画像の横方向の縁の場合は、そのスタート位置を左右方向の略中央にする(第5条件)。
【0074】
このような処理を目的地を含む最後の切出地図画像M19まで繰り返す。
【0075】
つまり、制御部20は車載機1の表示・操作部11において地図画像が更新される際は、必ず自車位置マークaが地図画像の縦の縁の上下方向略中央、又は、横の縁の左右方向略中央の何れかに位置し、かつ、必ず地図方向の上が北となるノースアップ表示が可能な地図画像を切出す処理を実行する。
【0076】
このように、地図画像更新の際には、常に自車位置マークaが地図画像の縦方向の縁の上下中央、又は、横方向の縁の左右方向の略中央の何れかに表示され、かつ、地図方向の上が必ず北となる地図画像表示となるので、地図画像更新の際は自車位置マークaが地図画像において一定の位置に表示され、ユーザーは自車位置マークaを見失うことなくナビゲーションシステムを利用することができる。
【0077】
S204において、携帯端末2の制御部20は、所定枚数、例えば、4枚の切出地図画像を送信する。なお、切出地図画像には、縦軸(X)と横軸(Y)において、一意のアドレスデータが付与されている。このアドレスデータは後述する画像合成処理の際に機能する。
【0078】
<座標データ算出処理>
S203において、携帯端末2の制御部20は、座標データ算出機能により、GPS通信部27が、GPS衛星4から発信される信号に基づいてその時点の車両の位置データを受信する。携帯端末2の制御部20はこの位置データに基づいて、切出地図画像のどの位置に自車位置マークaが位置するのかを示す座標データを算出する。座標データは、例えば、X:Y=350:20のように縦軸(X)と横軸(Y)の数値で構成される。
【0079】
<マップマッチング処理>
更に、携帯端末2の制御部20は、マップマッチング機能により、車両に備わる各種センサからのデータ(速度、変速段、方位などを示すデータ)を車載機1から受信し、これらのデータと座標データに基づいてマップマッチングを行う。マップマッチングとは、各種センサの検出データに基づいて算出される車両の走行軌跡と、切出地図画像における道路のラインとにおいて類似するものが無いかを判断し、類似するものがある場合はその位置を「真」とし、「真」とされる座標と座標データとの差分係数kを求め、それを補正項とし座標データ算出処理により算出した座標データへその補正項を乗じることをいう。
【0080】
S205において、携帯端末2の制御部20は、マップマッチング後の座標データを車載機1へ送信し、Bへ移行する。Bへ移行すると、フローチャート図9に示すS206以降の処理を実行する。車載機1はこれら切出地図画像と座標データを、記憶部14へ記憶する。
【0081】
<重畳表示処理>
S101において、車載機1の制御部10は、重畳表示機能により、受信した切出地図画像、及び、座標データに基づく自車位置マークaを表示・操作部11へ重畳表示し、Aへ移行する。Aへ移行すると、フローチャート図9に示すS102以降の処理を実行する。重畳表示するとは、切出地図画像M1と、地図画像M1上において座標データにより定まるポイントに自車位置マークaとを重ねて表示させることをいう。
【0082】
次に、図9のフローチャート図におけるS206において、S203における処理と同様に携帯端末2の制御部20は座標データを算出する。
【0083】
<ルート逸脱判定処理>
S207において、携帯端末2の制御部20は、ルート逸脱判定機能により、算出した座標データが記憶部14に記憶する切出地図画像M1〜M19、又は、ルート周辺地図画像1000に含まれるルートを逸脱しているか否かを判断する。具体的には、例えば、マップマッチングでは修正できない程度に座標データがルートから離れたことや、車両の進行方向がルートの進行方向と異なっていることなどに基づいて座標データがルートを逸脱していると判断する。例えば、図10に示すようにM5に表示されている自車位置マークaがルートbから逸脱したか否かを判断する。制御部20は座標データがルートを逸脱すると判断する場合は、S208へ移行する(S207にてYes)。座標データがルートを逸脱すると判断しない場合は、S209へ移行する(S209にてNo)。
【0084】
S208において、携帯端末2の制御部20は、逸脱通知を車載機1とサーバー3へ送信し、αへ移行する。αへ移行すると、フローチャート図7に示すS201以降の処理を実行する。つまり、この処理は携帯端末2が実行するリルート処理を意味する。制御部20は座標データがルートを逸脱すると判断しない場合は、S209へ移行する(S207にてNo)。
【0085】
S102において、車載機1の制御部10は、逸脱通知を受信したか否かを判断し、受信したことを判断する場合は、S103へ移行する(S102にてYES)。制御部10は、逸脱通知を受信したことを判断しない場合は、S104へ移行する(S102にてNo)。制御部10はこの逸脱通知を受信することをもって、逸脱したことを検知することとする。なお、制御部10が、携帯端末2の制御部10が実施するルート逸脱判定処理を実行することとしても良い。
【0086】
S303において、サーバー3の制御部30は、逸脱通知を受信したか否かを判断し、受信したことを判断する場合はβへ移行する(S303にてYes)。βへ移行すると、フローチャート図7に示すS300以降の処理を実行する。つまり、この処理はサーバー3が実行するリルート処理をを意味する。制御部30は、逸脱通知を受信したことを判断しない場合は、S304へ移行する(S303にてNo)。
【0087】
S303において、サーバー3の制御部30は、サーバー3の終了条件が成立したか否かを判断する。サーバー3の終了条件が成立したか否かは、サーバーのコンテンツ提供サービスであるナビゲーション機能の停止命令や、電源供給の停止などをいう。終了条件が成立したと判断する場合は、制御を終了する(S304にてYes)。終了条件が成立しないと判断する場合は、S303以降の制御を繰り返す(S304にてNo)。
【0088】
<画像合成処理>
S103において、車載機1の制御部10は、画像合成機能により、画像合成処理を実行する。画像合成処理は、フローチャート図11に基づいて説明する。
【0089】
S110において、車載機1の制御部10は、記憶部14に記憶されている複数の地図画像を用いた案内画面を表示・操作部11へ表示する。つまり、制御部10は記憶部14に記憶されている所定枚数、例えば、4枚のうち4枚の地図画像を合成処理する。図10に示すM5の地図画像において自車位置マークaがルートbを逸脱する場合の拡大図を図12のG4に示す。制御部10は、図10のG4が示すような状況にあると判断した場合は、図12のG5に示すように、M5からM8までの4枚の地図画像を合成し、かつ、合成した地図画像の全体を車載機1の表示・操作部11へ表示できるようなサイズにリサイズする。地図画像の合成処理は、地図画像へ付与されている一意のアドレスデータに基づいて実行する。この合成処理を詳述すると、切出地図画像のX軸とY軸に付与された複数の一意のアドレスが全ての切出地図画像へ付与されており、かつ、隣接する切出し地図画像同士の連続するエリアのアドレスには、同じアドレスデータが付与されている。制御部10は、切出し地図画像に付与されている一意のアドレスが相互に一致するポイントを接続する。これを複数の切出地図画像全てで行うことによって合成処理が実現される。更に、制御部10は、図12のG5に示すように合成した地図画像の全体を表示させる際に不足する地図データcについては、黒くするなどして画像を加工する。
【0090】
S111において、車載機1の制御部10は、リサイズした合成地図画像を表示・操作部11へ表示する。
【0091】
画像合成処理について、換言すると、画像合成処理は、切出地図画像に含まれるルートが連続するように、記憶部14に記憶されている複数の切出地図画像を並べて合成するとともに、その合成画像の全体が、車載機の表示・操作部11へ表示できるように、その合成画像を縮小し、縮小する際に記憶部14に記憶されてないために不足する地図画像については、単一の色(例えば、黒色)を表示させる処理を実行する。
【0092】
<自律航法表示処理>
車載機1の制御部10は、自律航法表示機能により、データ提供装置である携帯端末2とサーバー3から受信するデータに基づかずに自車位置マークaを適切に表示する。自律航法表示機能について説明する。制御部10は、データ提供装置である携帯端末2とサーバー3とが連携してリルート処理を実行している間は、データ提供装置においては、その処理を優先して実行しているため、携帯端末2から自車位置マークの座標データの定期的な受信が滞ってしまう。そこで、制御部10は、車載ネットワーク8を介して受信した回転検出部6、及び、車速検出部7からの検出値と、受信処理が停止する直前の座標データとに基づいて、現在の地図画像における自車位置マークaの座標データを予測する。
【0093】
S113において、制御部10は、受信直前の座標データから車速データに基づいてどの程度移動したのかを算出し、かつ、回転データに基づいてどの程度方角を変更したのかを算出することによって座標データを予測する。従って、制御部10は携帯端末2から座標データの受信処理が滞っていても、合成地図画像において自車位置マークaを更新表示させることができ、ユーザは車両を走行させているエリアを認識できる。
【0094】
なお、自車位置マークaをGPSに基づいて能動的に表示する方法(以降、能動航法表示)とは逆に、車両の走行データに基づいて自立的に表示するこの方法を自律航法表示という。
【0095】
S114において、車載機1の制御部10は携帯端末2から所定のデータを受信したか否かを判断する。所定のデータを受信したと判断しない場合は、S113へ戻りそれ以降の処理を繰り返す(S114にてNo)。所定のデータを受信したと判断する場合は、合成処理のルーチンを終了して図9のフローチャート図に戻ってγへ移行する。γへ移行すると、フローチャート図7に示すS101以降の処理を実行する。つまり、この処理はデータ提供装置である携帯端末2とサーバー3とが連携してリルート処理を実行した後の車載機1における処理である。
【0096】
<自車位置マーク更新処理>
車載機1の制御部10は、自車位置マーク更新機能により、携帯端末2から所定の周期で受信した座標データに基づいて自車位置マークaを表示・操作部11へ更新表示する。
【0097】
S209において、S206にて算出した座標データを車載機1へ所定の周期、例えば、3秒周期で送信する。
【0098】
S104において、車載機1の制御部10は、表示・操作部11において表示している地図画像において、携帯端末2から座標データを受信する毎に地図画像へ座標データにより定まるポイントへ自車位置マークaを更新して表示する。この際、表示・操作部11における地図画像の表示は維持される。つまり、制御部10は地図画像を固定的に表示して維持しつつその地図画像に対して移動するように自車位置マークaを更新表示する。
【0099】
<地図画像記憶処理>
車載機1の制御部10は、地図画像記憶機能により、所定枚数の切出地図画像を記憶部14へ記憶する。制御部10が切出地図画像を記憶部14へ記憶する最大の枚数は決まっており、例えば、4枚である。制御部10が記憶部14へ記憶する4枚の切出地図画像は、例えば、図8に示す切出地図画像M1〜M19を昇順に並べた場合の順番が連続するものである。
【0100】
従って、始めは記憶部14にはM1〜M4の切出地図画像が記憶されており、制御部10が現在、表示・操作部11へ表示している切出地図画像M1を次の切出地図画像M2へ更新する際には、更新前の切出地図画像M1を記憶部14から消去し、携帯端末2へ新たな切出地図画像M5の送信を要求し、携帯端末2から受信した切出地図画像M5を記憶部14へ記憶する。つまり、制御部10が行う記憶制御は、FIFO(First In First Out)制御であり、記憶部14における切出地図画像の最大記憶枚数を4枚として、最新の切出地図画像を記憶した後に最古の切出地図画像を消去する制御である。
【0101】
携帯端末2の制御部20は、切出地図画像送信要求を車載機1から受信した場合は、車載機1が次に必要とする切出地図画像を送信する。つまり、この例で言えば、M4に順番が連続するM5の切出地図画像を送信する。
【0102】
このような地図画像記憶処理を実行することにより、車載機1の表示・操作部11において切出地図画像を更新する前に、次に表示すべき切出地図画像を車載機1の記憶部14に記憶させておくことができ、地図画像の更新表示遅れが発生することがない。更に、自車位置マークaがルートbを逸脱する場合に、画像合成処理の実行が可能となるとともに、不必要な切出画像を消去することにより記憶部14の容量を適切に維持し他の制御へ記憶容量を供すことが可能となる。
【0103】
この地図画像記憶処理をフローチャート図9に基づいて説明する。
【0104】
S105において、車載機1の制御部10は、記憶部14に記憶している切出地図画像の枚数が所定枚数より少ないか否かを判断する。所定枚数は、例えば、4枚である。4枚より少ないと判断する場合は、S106へ移行する(S105にてYes)。4枚より少ないと判断しない場合は、S107へ移行する(S105にてNo)。ここで、記憶部14に記憶している切出地図画像の枚数が4枚より少なくなっている状況とは、後述する、S111において制御部10が記憶部14から地図画像更新前の切出地図画像を消去した場合である。
【0105】
S106において、車載機1の制御部10は、記憶部14に記憶している切出地図画像の枚数が4枚より少ないため、携帯端末2へ新たな切出地図画像の送信を要求する。
【0106】
S210において、携帯端末2の制御部20は、車載機1から切出地図画像送信要求を受信したか否かを判断する。制御部20は、車載機1から切出地図画像送信要求を受信したと判断した場合は、車載機1において次に記憶しておくべき切出地図画像を送信してS212へ移行する(S210にてNo)。制御部20は、車載機1から切出地図画像送信要求を受信したと判断しない場合は、車載機へ切出地図画像を送信せずにS212へ移行する(S210にてYes)。
【0107】
<案内終了判定処理>
S107において、車載機1の制御部10は、案内終了判定機能により、携帯端末2から受信した座標データが目的地に含まれるか否かを判断する。つまり、ユーザを目的地まで案内することがナビゲーションシステム100の目的であるため、地図画像に含まれる目的地に座標データが含まれる場合には、車両が目的地に到達したものとみなしナビゲーションシステム100を停止する。従って、制御部10は携帯端末から受信した座標データが目的地に含まれると判断する場合は、S108へ移行し案内が終了したことを示す終了通知を携帯端末2へ送信する(S107にてYes)。座標データが目的地に含まれると判断しない場合は、S109へ移行する(S107にてNo)。
【0108】
S212において、携帯端末2の制御部20は終了通知を受信したか否かを判断する。制御部20は終了通知を受信したと判断した場合は座標データ算出処理や座標データ送信処理などのナビゲーション制御を終了する(S212にてYes)。終了通知を受信したと判断しない場合はS206以降の処理を繰り返す(S212にてNo)。
【0109】
<地図画像更新処理>
S109において、車載機1の制御部10は、携帯端末2から受信した座標データが図8で示す切出地図画像M1の更新領域cに含まれるか否かを判断する。ここで、更新領域cとは、表示・操作部11へ表示される地図画像における周りの所定の幅をもった領域、つまり縁をいう。更新領域cとルートbとが重なる位置が更新位置cbとなり、この更新位置cbに自車位置マークaが位置した場合に地図画像を更新する。車両はルートに沿って動くことが想定されるため、本実施の形態においては、更新領域cに座標データが含まれたことをもって、更新位置cbに自車位置マークaが位置したと判断するようになっている。この更新領域cは次に更新表示される地図画像のスタート位置の周辺領域と重なる領域であり、更新表示された際に前の地図画像と連続性を有することをユーザーが認識できるようにしている。座標データが地図画像の更新領域cに含まれるようになったと判断しない場合は、S104へ戻り、S104以降の処理を繰り返す(S109にてNo)。座標データが地図画像の更新領域cに含まれると判断した場合はS110へ移行する(S109にてYes)。
【0110】
S110において、次の切出地図画像M2を記憶部14から読み出して表示・操作部11へ更新表示し、S111へ移行する。この更新表示する切出地図画像は、制御部10が、携帯端末2と連携して行う地図画像記憶処理により、更新する前に記憶部14に記憶されているため更新表示を遅らせることなく適切なタイミングで実行できる。以降、図8が示す切出地図画像M2〜M19においても同じ地図画像更新処理を実行する。
【0111】
S111において、地図画像記憶処理における一部の制御である最古画像の消去制御を行う。つまり、車載機1の制御部10は、記憶部14が4枚よりも多くなったため、記憶部14に記憶させる最大の画像枚数の4枚を維持するために最古の地図画像を消去する。最古の地図画像とは更新する前に表示していた切出地図画像をいう。
【0112】
このように本実施の形態のナビゲーションシステム100は、ユーザーが車両を設定ルートから逸脱させて走行させた場合は、データ提供装置である携帯端末2とサーバー3が連携してリルート処理を実行するが、リルート処理実行開始から車載機1が切出地図画像を取得して表示・操作部11へ表示するまでには、通信速度の遅延などの原因により時間がかかってしまうので、その間は、車載機1の制御部10は記憶部14に記憶されていた複数枚の地図画像のみを合成処理し、その合成した地図画像の全体を表示・操作部11へ表示させることによって、ユーザーへどの方角へ向かえばルートへ復帰できるのかを予測しやすくできる。
【0113】
また、データ提供装置である携帯端末2とサーバー3とが連携してリルート処理を実行している間は、データ提供装置がその処理を優先して実行することにより、車載機1において携帯端末2から座標データの定期的な受信処理が滞るが、車載機1は車載ネットワーク8を介して受信した回転検出部6、及び、車速検出部7からの検出値と、受信処理が停止する直前の座標データとに基づいて、現在の地図画像における自車位置マークaの座標データを予測することにより、合成地図画像において自車位置マークaを更新表示させることができ、ユーザは車両を走行させているエリアを認識することができる。
【0114】
<2.第2の実施の形態>
次に、第2の実施の形態について説明する。この第2の実施の形態は、上記第1の実施の形態と比較して、図9に示すS103において実施される画像合成処理に関して別の処理を行うようになっている。以下では、第1の実施の形態との相違点を中心に説明する。
【0115】
<画像合成処理>
本実施の形態は、車載機1の制御部10が、画像合成機能により、画像合成処理を実行する。本実施の形態は、制御部10が車載ネットワーク8を介して車速検出部7から入出力部16が受信した検出値に基づいて車速値xを取得し、取得した車速値xに応じて記憶部14に記憶している複数画像の合成枚数を変化させる。そのため、第1実施の形態では記憶部14に記憶させておく地図画像の枚数を4枚としていたが、本実施の形態においては、記憶部14に記憶させておく地図画像の枚数を6枚とし、車速値xに応じて地図枚数の合成枚数を柔軟に変化できるようにしている。また、この機能を発揮するためにフローチャート図9におけるS105の地図画像記憶処理において、記憶部14に記憶させる枚数を6枚とする。
【0116】
S103において、車載機1の制御部10が実施する本実施の形態における画像合成処理をフローチャート図13に基づいて説明する。
【0117】
S115において、制御部10は、取得した車速値xが0km/h以上か否かを判断(第1判断)し、次に取得した車速値xが40km/h以上か否かを判断(第2判断)し、次に取得した車速値xが60km/h以上か否かを判断(第3判断)する。制御部10は、この順で車速値xを判断して「真」となる判断結果で後順のものの処理を実行する。例えば、制御部10は、車速値xが50km/hの場合は、第1判断は「真」で、第2判断は「真」、第3判断は「偽」となるので、「真」となる判断結果の後順のものは第2判断の結果であるためこの判断時の処理を実行することになる。換言すると、車速値xが0km/h以上40km/h未満の場合はS116へ移行する。車速値xが40km/h以上60km/h未満の場合はS117へ移行する。車速値xが60km/h以上の場合はS116へ移行する。
【0118】
S116において、車載機1の制御部10は、車速検出部7から受信した検出値に基づいて取得した車速値xが0km/h以上40km/h未満であるため、記憶部14に記憶されている6枚の地図画像のうち4枚の地図画像を合成処理する。図14のG6に示すように、M5からM8までの4枚の地図画像を合成する。地図画像の合成処理は、地図画像へ付与されている一意のアドレスデータに基づいて実行する。更に、制御部10は、図14のG7に示すように合成した地図画像の全体を表示させる際に不足する地図データcについては、黒くするなどして画像を加工する。
【0119】
S117において、車載機1の制御部10は、車速検出部7から受信した検出値に基づいて取得した車速値xが40km/h以上60km/h未満であるため、記憶部14に記憶されている6枚の地図画像のうち5枚の地図画像を合成処理する。図14のG7に示すように、M5からM9までの5枚の地図画像を合成する。地図画像の合成処理は、地図画像へ付与されている一意のアドレスデータに基づいて実行する。更に、制御部10は、図14のG7に示すように合成した地図画像の全体を表示させる際に不足する地図データcについては、黒くするなどして画像を加工する。
【0120】
S118において、車載機1の制御部10は、車速検出部7から受信した検出値に基づいて取得した車速値xが60km/h以上であるため、記憶部14に記憶されている6枚の地図画像のうち6枚の地図画像を合成処理する。図14のG8に示すように、M5からM10での6枚の地図画像を合成する。地図画像の合成処理は、地図画像へ付与されている一意のアドレスデータに基づいて実行する。更に、制御部10は、図14のG8に示すように合成した地図画像の全体を表示させる際に不足する地図データcについては、黒くするなどして画像を加工する。
【0121】
S119〜S122の処理はフローチャート図11のS111〜S114と同じであるため説明を省略する。
【0122】
ユーザーが車両を設定ルートから逸脱させて走行させた場合は、データ提供装置である携帯端末2とサーバー3が連携してリルート処理を実行するが、リルート処理実行開始から車載機1が切出地図画像を取得して表示・操作部11へ表示するまでには、通信速度の遅延などの原因により時間がかかってしまうので、その間は、車載機1の制御部10は記憶部14に記憶されていた複数枚の地図画像のみを合成処理し、その合成した地図画像の全体を表示・操作部11へ表示させることによって、ユーザーへどの方角へ向かえばルートへ復帰できるのかを予測しやすくさせている。
【0123】
しかし、その合成地図画像を車両の速度に応じたものにしなければ、ユーザーが不便に感じる場合が少なくない。例えば、ユーザーが車両を車速60km/h以上で走行させている場合に、制御部10が4枚の地図画像に基づく合成地図画像の全体を表示・操作部11へ表示させたとすると、車速が60km/h以上であるために、地図画像の自車位置マークaが4枚からなる合成地図画像を瞬く間に移動していくことが考えられ、自車位置マークaより先の地図画像が表示・操作部11において十分に表示されず、ユーザーがその予測をしにくくなるという事態が発生する。
【0124】
他方で、ユーザーが車両を車速が40km/h以下で走行させている場合に、制御部10が6枚の地図画像に基づく合成地図画像の全体を表示・操作部11へ表示させたとすると、車速が40km/h以下であるために、地図画像の自車位置マークaが1枚の地図画像をゆっくり移動していくことになる。この場合、ユーザーは現在走行しているエリアの地図画像の詳細を知りながらその予測をしたいと思うはずなのに、各地図画像が小さい6枚の合成地図画像の全体が表示・操作部11へ表示されて、ユーザーがその予測をしにくくなるという事態が発生する。
【0125】
本実施の形態によれば、ナビゲーションシステム100におけるリルート処理により時間がかかる間は、車載機1の制御部10は表示・操作部11へ表示する合成地図画像の画像枚数を車速に応じて変化させるので、ユーザーへどの方角へ向かえばルートへ復帰できるのかを予測しやすいくさせるのに適切な合成地図画像を表示することができる。
【0126】
<3.第3の実施の形態>
次に、第3の実施の形態について説明する。この第3の実施の形態は、上記第1の実施の形態と比較して、図9に示すS103において実施される画像合成処理に関して別の処理を行うようになっている。以下では、第1の実施の形態との相違点を中心に説明する。
【0127】
<画像合成処理>
本実施の形態は、車載機1の制御部10が、画像合成機能により、画像合成処理を実行する。本実施の形態は、制御部10が記憶部14に記憶している切出地図画像に基づいて走行しているエリアがどのようなエリアであるかを判断して、その判断結果に応じて合成する地図画像枚数を変化する。そのため、第1実施の形態では記憶部14に記憶させておく地図画像の枚数を4枚としていたが、本実施の形態においては、記憶部14に記憶させておく地図画像の枚数を6枚とし、走行エリアに応じて地図画像枚数の合成枚数を柔軟に変化できるようにしている。また、この機能を発揮するためにフローチャート図9のS105における地図画像記憶処理において、記憶部14に記憶して維持させる枚数を6枚とする。
【0128】
S103において、車載機1の制御部10が実施する本実施の形態における画像合成処理をフローチャート図14に基づいて説明する。
【0129】
S123において、制御部10は、記憶部14に記憶している切出地図画像に基づいて走行しているエリアがトンネルであるか否かを判断する。走行エリアがトンネルであると判断する場合はS124へ移行する。走行エリアがトンネルであると判断しない場合はS125へ移行する。
【0130】
S124において、車載機1の制御部10は、記憶部14に記憶されている6枚の地図画像のうち6枚の地図画像を合成処理する。図14のG8に示すように、M5からM10までの6枚の地図画像を合成する。地図画像の合成処理は、地図画像へ付与されている一意のアドレスデータに基づいて実行する。更に、制御部10は、図14のG8に示すように合成した地図画像の全体を表示させる際に不足する地図データcについては、黒くするなどして画像を加工する。
【0131】
S125において、制御部10は、記憶部14に記憶している切出地図画像に基づいて走行している現在位置から進行方向の所定距離内、例えば、10km以内に信号がないか否かを判断する。10km以内に信号がないと判断する場合はS126へ移行する。10km以内に信号がないと判断しない場合はS127へ移行する。
【0132】
S126において、車載機1の制御部10は、記憶部14に記憶されている6枚の地図画像のうち5枚の地図画像を合成処理する。図14のG7に示すように、M5からM9までの6枚の地図画像を合成する。地図画像の合成処理は、地図画像へ付与されている一意のアドレスデータに基づいて実行する。更に、制御部10は、図14のG7に示すように合成した地図画像の全体を表示させる際に不足する地図データcについては、黒くするなどして画像を加工する。
【0133】
S127において、車載機1の制御部10は、記憶部14に記憶されている6枚の地図画像のうち4枚の地図画像を合成処理する。図14のG8に示すように、M5からM8までの4枚の地図画像を合成する。地図画像の合成処理は、地図画像へ付与されている一意のアドレスデータに基づいて実行する。更に、制御部10は、図14のG6に示すように合成した地図画像の全体を表示させる際に不足する地図データcについては、黒くするなどして画像を加工する。
【0134】
S128〜S131の処理はフローチャート図11のS111〜S114と同じであるため説明を省略する。
【0135】
ユーザーが車両を設定ルートから逸脱させて走行させた場合は、データ提供装置である携帯端末2とサーバー3が連携してリルート処理を実行するが、リルート処理実行開始から車載機1が切出地図画像を取得して表示・操作部11へ表示するまでには、通信速度の遅延などの原因により時間がかかってしまうので、その間は、車載機1の制御部10は記憶部14に記憶されていた複数枚の地図画像のみを合成処理し、その合成した地図画像の全体を表示・操作部11へ表示させることによって、ユーザーへどの方角へ向かえばルートへ復帰できるのかを予測しやすくさせている。
【0136】
しかし、車両が走行するエリアに応じた合成地図画像にしなければ、ユーザーが不便に感じる場合が少なくない。例えば、ユーザーがトンネルで車両を走行させている場合に、制御部10が4枚の地図画像に基づく合成地図画像の全体を表示・操作部11へ表示させたとすると、走行エリアがトンネルであるために、地図画像の大半の領域がトンネルと山などの表示になることが考えられ、車両がトンネルを走行させて抜けた後の地図画像が足りず、ユーザーがその予測をしにくくなるという事態が発生する。
【0137】
また、ユーザーが現在位置から進行方向の所定距離内、例えば、10km以内に信号がない道路で車両を走行させている場合に、制御部10が4枚の地図画像に基づく合成地図画像の全体を表示・操作部11へ表示させたとすると、走行エリアが信号がない10kmの道路であるため車両の走行速度は比較的速くなる傾向がある。この場合に、車両の走行速度が比較的速いために、地図画像の自車位置マークaが4枚からなる合成地図画像を瞬く間に移動していくことが考えられ、自車位置マークaより先の地図画像が表示・操作部11において十分に表示されず、ユーザーがその予測をしにくくなるという事態が発生する。
【0138】
本実施の形態によれば、ナビゲーションシステム100におけるリルート処理により時間がかかる間は、車載機1の制御部10は表示・操作部11へ表示する合成地図画像の画像枚数を車両の走行エリアに応じて変化させるので、ユーザーへどの方角へ向かえばルートへ復帰できるのかを予測しやすいくさせるのに、適切な合成地図画像を表示することができる。
【0139】
<4.第4の実施の形態>
次に、第4の実施の形態について説明する。この第4の実施の形態は、上記第1の実施の形態と比較して、図9に示すS103において実施される画像合成処理に関して別の処理を行うようになっている。以下では、第1の実施の形態との相違点を中心に説明する。
【0140】
<画像合成処理>
本実施の形態は、車載機1の制御部10が、画像合成機能により、画像合成処理を実行する。本実施の形態は、制御部10が表示・操作部11、又は、操作部22が受け付けたユーザ操作の操作量に応じて、記憶部14に記憶している複数の地図画像を合成した合成地図画像を表示・操作部11に表示するサイズに切出してそこへ表示させる。つまり、制御部10は表示・操作部11、又は、操作部22により受け付けたユーザー操作量に応じて表示・操作部11へ表示する合成地図画像をスクロール表示させる。例えば、制御部10は、図17に示すM5〜M8までの切出地図画像を合成し、この合成地図画像から、表示・操作部11に表示するサイズeを、制御部10が表示・操作部11、又は、操作部22が受け付けたユーザ操作の操作量に応じて切出して、表示・操作部11へ表示する。
【0141】
S103において、車載機1の制御部10が実施する本実施の形態における画像合成処理をフローチャート図16に基づいて説明する。
【0142】
S132において、制御部10は、記憶部14に記憶されている4枚の地図画像の地図画像を合成処理する。
【0143】
S133において、車載機1の制御部10は、制御部10が表示・操作部11、又は、操作部22が受け付けたユーザ操作の操作量に応じて、記憶部14に記憶している複数の地図画像を合成した合成地図画像を表示・操作部11のサイズに切出す。地図画像の合成処理は、地図画像へ付与されている一意のアドレスデータに基づいて実行する。更に、制御部10は、図14のG7に示すように合成した地図画像の全体を表示させる際に不足する地図データcについては、黒くするなどして画像を加工する。
【0144】
S134において、車載機1の制御部10は、切出した地図画像を表示・操作部11へ表示する。
【0145】
S135,S136の処理はフローチャート図11のS113,S114と同じであるため説明を省略する。
【0146】
ユーザーが車両を設定ルートから逸脱させて走行させた場合は、データ提供装置である携帯端末2とサーバー3が連携してリルート処理を実行するが、リルート処理実行開始から車載機1が切出地図画像を取得して表示・操作部11へ表示するまでには、通信速度の遅延などの原因により時間がかかってしまうので、その間は、車載機1の制御部10は記憶部14に記憶されていた複数枚の地図画像を合成処理し、その合成した地図画像の全体を表示・操作部11へ表示させることによって、ユーザーへどの方角へ向かえばルートへ復帰できるのかを予測しやすくさせている。
【0147】
しかし、その合成地図画像をユーザーの意図に応じたものにしなければ、ユーザーが不便に感じる場合が少なくない。例えば、ユーザーが車両を様々な速度で走行させることがあり、車両の速度を速めて現在走行しているエリアよりも先の地図を表示させてその予測をしたいと思う場合があり、他方で車両の速度を遅くして現在走行しているエリアの地図画像の詳細を知りながらその予測をしたいと思う場合がある。このような場合に、ユーザーの意思に応じた地図画像の表示ができずに、ユーザーがその予測をしにくくなるという事態が発生する。
【0148】
本実施の形態によれば、ナビゲーションシステム100におけるリルート処理により時間がかかる間は、車載機1の制御部10は表示・操作部11へ表示する合成地図画像の画像をユーザーの表示・操作部11、又は、操作部22が受け付ける操作量に応じて変化させるので、ユーザーへどの方角へ向かえばルートへ復帰できるのかをより予測しやすいくさせるのに適切な合成地図画像を表示することができる。
【0149】
<5.第5の実施の形態>
次に、第5の実施の形態について説明する。上記第1〜第4の実施の形態では、ナビゲーションシステムは、車載機1、データ提供装置である携帯端末2、及び、サーバー3を備えて構成されるとして説明したが、図18が示すような車載機1、及び、データ提供装置であるサーバー3を備えて構成される携帯端末2を備えないナビゲーションシステム101としても良い。
【0150】
この場合、車載機1とサーバー3との間で通信を行ってナビゲーション機能を実現する。車載機1にはサーバー3と通信を行ってナビゲーションに関するデータを送受信する通信部を備え、サーバー3には車載機1と通信を行ってナビゲーションに関するデータを送受信する通信部を備える。
【0151】
上記実施の形態においては、携帯端末2の制御部20が地図画像生成機能により地図画像切出し処理を実行するとして説明したが、この場合、サーバー3の制御部30がその処理を実行する。制御部20が座標データ算出機能により位置データに基づいて座標データを算出して車載機1へ送信処理を実行すると説明したが、この場合、車載機1の制御部10がその処理を実行する。制御部20がルート逸脱判定機能により座標データが切出地図画像、又は、ルート周辺地図画像に含まれるルートを逸脱したか否かを判定し、逸脱した場合にサーバー3へ逸脱通知を送信する処理を実行すると説明したが、この場合、車載機1の制御部10がその処理を実行する。また、制御部20がマップマッチング機能により車載機1から取得した車両情報に基づいてマップマッチング処理を実行すると説明したが、この場合、車載機1の制御部10がその処理を実行する。
【0152】
第5の実施の形態においては、GPS通信部は、車載機1に備わり車載機1の制御部10はGPS通信部により受信した車両の現在位置データを所定のタイミングで座標データへ算出する処理を実行する。
【0153】
車載機1の制御部10はこの算出した座標データに基づいて前述の各機能を実現する。
【0154】
第5の実施の形態のナビゲーションシステムにおいては、サーバー3がナビゲーションに関するデータを車載機1へ提供する。従って、サーバー3のみが、ナビゲーションに関するデータを車載機1へ提供するデータ提供装置となる。
【0155】
なお、本実施の形態のサーバー3と同様の機能を携帯端末2が備えていてもよい。この場合は、携帯端末2のみがナビゲーションに関するデータを車載機1へ提供するデータ提供装置となる。
【0156】
<6.変形例>
以上、本発明の実施の形態について説明してきたが、この発明は上記実施の形態に限定されるものではなく様々な変形が可能である。以下では他の実施の形態について説明する。もちろん、以下で説明する形態を適宜組み合わせても良い。
【0157】
上記第1及び第2実施の形態では、ナビゲーションシステムにおいて、GPS通信部は携帯端末2に備わっているものとして説明を行ったが、GPS通信部は車両側に備わっていても良い。この場合、車載機1の制御部10はGPS通信部と通信可能に接続され、GPS通信部により受信した信号に基づいて車両の現在の位置データを導出し、導出した一データを所定のタイミングで携帯端末2へ送信する。この位置データは、携帯端末2の近距離無線通信部21が受信することで携帯端末2に取得される。携帯端末2の制御部20はこの受信した位置データに基づいて座標データを算出し、所定のタイミングで座標データを車載機1へ送信する。車載機1の制御部10は、表示・操作部11へ表示する地図画像上の自車位置マークaをこの座標データに基づいて更新表示する。また、携帯端末2の制御部20は、所定のタイミングで車載機1から位置データ受信し、この位置データに基づいてルート逸脱判定処理を実行する。リルート処理を実行している間は、GPS通信部により得られた信号に基づいて位置データを導出し、導出した位置データに基づいて合成地図画像において自車位置マークaを更新表示させることができる。
【0158】
また、上記実施の形態では、携帯端末2から車載機1へ座標データが車両の現在の位置データとして送信されていたが、携帯端末2において自車位置マークaのみを含む画像を位置データとして携帯端末2から送信し、車載機1はその画像を一つのレイヤーとして地図画像に重畳するようにしてもよい。
【0159】
また、上記実施の形態では、プログラムに従ったCPUの演算処理によってソフトウェア的に各種の機能が実現されると説明したが、これら機能のうちの一部は電気的なハードウェア回路により実現されても良い。また逆に、ハードウェア回路によって実現されるとした機能のうちの一部は、ソフトウェア的に実現されても良い。
【0160】
更に、各実施例の制御を説明するフローチャート図における各処理は、便宜上一の系列で示しているが、各制御部が各処理を並列に処理し、又は、優先順位が設定されて処理するようなものであっても良い。例えば、車載機1の制御部10が実行する自車位置マーク更新処理と、地図画像更新処理とが図9に示す順に実行される必要はなく、各処理に設定された周期で実行されるものでもあっても良く、設定された優先順位に基づいて実行されるものであっても良く、又は、所定のイベントが発生した場合に実行され各処理後の制御を各制御部が各機能の目的を達成するように調停を行うものであっても良い。
【符号の説明】
【0161】
1 車載機
2 携帯端末
3 サーバー
4 GPS衛星
10 制御部
11 表示・操作部
15 近距離無線通信部
20 制御部
21 近距離無線通信部
27 GPS通信部
28 通信部
33 記憶部
34 通信部
【特許請求の範囲】
【請求項1】
車両に搭載されて表示手段を有する車載機と、ナビゲーションに関するデータを前記車載機へ提供するデータ提供装置とを有するナビゲーションシステムであって、
前記データ提供装置は、
前記車両の現在位置を取得する現在位置取得手段と、
前記車両の目的地までのルートを取得する第1ルート取得手段と、
前記現在位置が前記ルートから逸脱した場合に、該現在位置から前記目的地までの新たなルートを再取得する第2ルート取得手段と、
前記車載機の前記表示手段の画面に合わせたサイズの、前記ルートの案内に用いる複数の地図画像を生成する地図画像生成手段と、
生成された前記複数の地図画像を前記車載機に順次送信する送信手段と、
を備え、
前記車載機は、
前記データ提供装置から前記複数の地図画像を順次受信する受信手段と、
前記受信手段において受信済の地図画像を記憶する記憶手段と、
前記現在位置が前記ルートから逸脱したことを検知する検知手段と、
前記現在位置が前記ルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を前記表示手段に表示させ、前記現在位置が前記ルートから逸脱したことを検知される場合は前記記憶手段に記憶された複数の地図画像を用いた案内画面を前記表示手段に表示させる表示制御手段と、
を備えることを特徴とするナビゲーションシステム。
【請求項2】
請求項1に記載のナビゲーションシステムにおいて、
前記表示制御手段は、前記現在位置が前記ルートから逸脱したことを検知される場合は、前記記憶手段に記憶されている複数の地図画像の合成画像の全体を前記表示手段に表示させることを特徴とするナビゲーションシステム。
【請求項3】
請求項1に記載のナビゲーションシステムにおいて、
前記車載機は、
ユーザ操作を受け付ける操作手段、
を更に備え、
前記表示制御手段は、前記現在位置が前記ルートから逸脱したことを検知される場合は、前記記憶手段に記憶された複数の地図画像の合成画像の一部を前記表示手段に表示させ、前記ユーザ操作に応じてスクロールさせて前記合成画像の他の一部を前記表示手段に表示させることを特徴とするナビゲーションシステム。
【請求項4】
請求項1ないし3のいずれかに記載のナビゲーションシステムにおいて、
車載機は、
前記車両の走行速度を入力する入力手段、
を更に備え、
前記表示制御手段は、前記現在位置が前記ルートから逸脱したことを検知された場合に、前記案内画面に用いる前記地図画像の数を前記走行速度に応じて決定することを特徴とするナビゲーションシステム。
【請求項5】
請求項1ないし3のいずれかに記載のナビゲーションシステムにおいて、
車載機は、
前記地図画像に基づいて前記車両が走行中の走行エリアを判定する判定手段、
を更に備え、
前記表示制御手段は、前記現在位置が前記ルートから逸脱したことを検知された場合に、前記案内画面に用いる前記地図画像の数を走行エリアに基づいて決定することを特徴とするナビゲーションシステム。
【請求項6】
請求項1ないし5のいずれかに記載のナビゲーションシステムにおいて、
前記車載機は、
前記車両の現在位置を前記データ提供装置から受信する位置受信手段と、
前記車両に設けられる外部装置からの信号に基づいて前記車両の現在位置を導出する導出手段と、
を更に備え、
前記表示制御手段は、
前記現在位置が前記ルートから逸脱したことを検知されない場合は、前記データ提供装置から受信した現在位置に基づいて前記案内画面中に自車位置マークを表示し、
前記現在位置が前記ルートから逸脱したことを検知された場合は、前記導出された現在位置に基づいて前記案内画面中に自車位置マークを表示させることを特徴とするナビゲーションシステム。
【請求項7】
車両に搭載され、データ提供装置からナビゲーションに関するデータの提供を受けて表示手段に案内画面を表示する車載機であって、
前記データ提供装置は、前記車両の現在位置が所定のルートから逸脱した場合に、該現在位置から目的地までの新たなルートを再取得するものであり、
前記データ提供装置から、前記表示手段の画面に合わせたサイズの、前記ルートの案内に用いる複数の地図画像を順次に受信する受信手段と、
前記受信手段において受信済の地図画像を記憶する記憶手段と、
前記車両の現在位置が前記ルートから逸脱したことを検知する検知手段と、
前記車両の現在位置が前記ルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を前記表示手段に表示させ、前記現在位置が前記ルートから逸脱したことを検知された場合は前記記憶手段に記憶された複数の地図画像を用いた案内画面を前記表示手段に表示させる表示制御手段と、
を備えることを特徴とする車載機。
【請求項8】
車両に搭載されて表示手段を有する車載機と、ナビゲーションに関するデータを前記車載機へ提供するデータ提供装置とを有するナビゲーションシステムにおけるナビゲーション方法であって、
前記データ提供装置が、前記車両の現在位置を取得するステップと、
前記データ提供装置が、前記車両の目的地までのルートを取得するステップと、
前記データ提供装置が、前記現在位置が前記ルートから逸脱した場合に、該現在位置から前記目的地までの新たなルートを再取得するステップと、
前記データ提供装置が、前記車載機の前記表示手段の画面に合わせたサイズの、前記ルートの案内に用いる複数の地図画像を生成するステップと、
前記データ提供装置が、生成された前記複数の地図画像を前記車載機に順次送信するステップと、
前記車載機が、前記データ提供装置から前記複数の地図画像を順次受信するステップと、
前記車載機が、受信済の地図画像を記憶手段に記憶するステップと、
前記車載機が、前記現在位置が前記ルートから逸脱したことを検知するステップと、
前記車載機が、前記現在位置が前記ルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を前記表示手段に表示させるステップと、
前記車載機が、前記現在位置が前記ルートから逸脱したことを検知される場合は前記記憶手段に記憶された複数の地図画像を用いた案内画面を表示手段に表示させるステップと、
を実行することを特徴とするナビゲーション方法。
【請求項9】
車両に搭載され、データ提供装置からナビゲーションに関するデータの提供を受けて表示手段に案内画面を表示する車載機に含まれるコンピュータによって実行可能なプログラムであって、
前記データ提供装置は、前記車両の現在位置が所定のルートから逸脱した場合に、該現在位置から目的地までの新たなルートを再取得するものであり、
前記プログラムの前記コンピュータによる実行は、前記コンピュータに、
前記データ提供装置から前記表示手段の画面に合わせたサイズの、前記ルートの案内に用いる複数の地図画像を順次に受信するステップと、
受信済の地図画像を記憶手段に記憶するステップと、
前記車両の現在位置が前記ルートから逸脱したことを検知するステップと、
前記車両の現在位置が前記ルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を前記表示手段に表示させるステップと、
前記現在位置が前記ルートから逸脱したことを検地される場合は前記記憶手段に記憶された複数の地図画像を用いた案内画面を前記表示手段に表示させるステップと、
を実行させることを特徴とするプログラム。
【請求項1】
車両に搭載されて表示手段を有する車載機と、ナビゲーションに関するデータを前記車載機へ提供するデータ提供装置とを有するナビゲーションシステムであって、
前記データ提供装置は、
前記車両の現在位置を取得する現在位置取得手段と、
前記車両の目的地までのルートを取得する第1ルート取得手段と、
前記現在位置が前記ルートから逸脱した場合に、該現在位置から前記目的地までの新たなルートを再取得する第2ルート取得手段と、
前記車載機の前記表示手段の画面に合わせたサイズの、前記ルートの案内に用いる複数の地図画像を生成する地図画像生成手段と、
生成された前記複数の地図画像を前記車載機に順次送信する送信手段と、
を備え、
前記車載機は、
前記データ提供装置から前記複数の地図画像を順次受信する受信手段と、
前記受信手段において受信済の地図画像を記憶する記憶手段と、
前記現在位置が前記ルートから逸脱したことを検知する検知手段と、
前記現在位置が前記ルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を前記表示手段に表示させ、前記現在位置が前記ルートから逸脱したことを検知される場合は前記記憶手段に記憶された複数の地図画像を用いた案内画面を前記表示手段に表示させる表示制御手段と、
を備えることを特徴とするナビゲーションシステム。
【請求項2】
請求項1に記載のナビゲーションシステムにおいて、
前記表示制御手段は、前記現在位置が前記ルートから逸脱したことを検知される場合は、前記記憶手段に記憶されている複数の地図画像の合成画像の全体を前記表示手段に表示させることを特徴とするナビゲーションシステム。
【請求項3】
請求項1に記載のナビゲーションシステムにおいて、
前記車載機は、
ユーザ操作を受け付ける操作手段、
を更に備え、
前記表示制御手段は、前記現在位置が前記ルートから逸脱したことを検知される場合は、前記記憶手段に記憶された複数の地図画像の合成画像の一部を前記表示手段に表示させ、前記ユーザ操作に応じてスクロールさせて前記合成画像の他の一部を前記表示手段に表示させることを特徴とするナビゲーションシステム。
【請求項4】
請求項1ないし3のいずれかに記載のナビゲーションシステムにおいて、
車載機は、
前記車両の走行速度を入力する入力手段、
を更に備え、
前記表示制御手段は、前記現在位置が前記ルートから逸脱したことを検知された場合に、前記案内画面に用いる前記地図画像の数を前記走行速度に応じて決定することを特徴とするナビゲーションシステム。
【請求項5】
請求項1ないし3のいずれかに記載のナビゲーションシステムにおいて、
車載機は、
前記地図画像に基づいて前記車両が走行中の走行エリアを判定する判定手段、
を更に備え、
前記表示制御手段は、前記現在位置が前記ルートから逸脱したことを検知された場合に、前記案内画面に用いる前記地図画像の数を走行エリアに基づいて決定することを特徴とするナビゲーションシステム。
【請求項6】
請求項1ないし5のいずれかに記載のナビゲーションシステムにおいて、
前記車載機は、
前記車両の現在位置を前記データ提供装置から受信する位置受信手段と、
前記車両に設けられる外部装置からの信号に基づいて前記車両の現在位置を導出する導出手段と、
を更に備え、
前記表示制御手段は、
前記現在位置が前記ルートから逸脱したことを検知されない場合は、前記データ提供装置から受信した現在位置に基づいて前記案内画面中に自車位置マークを表示し、
前記現在位置が前記ルートから逸脱したことを検知された場合は、前記導出された現在位置に基づいて前記案内画面中に自車位置マークを表示させることを特徴とするナビゲーションシステム。
【請求項7】
車両に搭載され、データ提供装置からナビゲーションに関するデータの提供を受けて表示手段に案内画面を表示する車載機であって、
前記データ提供装置は、前記車両の現在位置が所定のルートから逸脱した場合に、該現在位置から目的地までの新たなルートを再取得するものであり、
前記データ提供装置から、前記表示手段の画面に合わせたサイズの、前記ルートの案内に用いる複数の地図画像を順次に受信する受信手段と、
前記受信手段において受信済の地図画像を記憶する記憶手段と、
前記車両の現在位置が前記ルートから逸脱したことを検知する検知手段と、
前記車両の現在位置が前記ルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を前記表示手段に表示させ、前記現在位置が前記ルートから逸脱したことを検知された場合は前記記憶手段に記憶された複数の地図画像を用いた案内画面を前記表示手段に表示させる表示制御手段と、
を備えることを特徴とする車載機。
【請求項8】
車両に搭載されて表示手段を有する車載機と、ナビゲーションに関するデータを前記車載機へ提供するデータ提供装置とを有するナビゲーションシステムにおけるナビゲーション方法であって、
前記データ提供装置が、前記車両の現在位置を取得するステップと、
前記データ提供装置が、前記車両の目的地までのルートを取得するステップと、
前記データ提供装置が、前記現在位置が前記ルートから逸脱した場合に、該現在位置から前記目的地までの新たなルートを再取得するステップと、
前記データ提供装置が、前記車載機の前記表示手段の画面に合わせたサイズの、前記ルートの案内に用いる複数の地図画像を生成するステップと、
前記データ提供装置が、生成された前記複数の地図画像を前記車載機に順次送信するステップと、
前記車載機が、前記データ提供装置から前記複数の地図画像を順次受信するステップと、
前記車載機が、受信済の地図画像を記憶手段に記憶するステップと、
前記車載機が、前記現在位置が前記ルートから逸脱したことを検知するステップと、
前記車載機が、前記現在位置が前記ルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を前記表示手段に表示させるステップと、
前記車載機が、前記現在位置が前記ルートから逸脱したことを検知される場合は前記記憶手段に記憶された複数の地図画像を用いた案内画面を表示手段に表示させるステップと、
を実行することを特徴とするナビゲーション方法。
【請求項9】
車両に搭載され、データ提供装置からナビゲーションに関するデータの提供を受けて表示手段に案内画面を表示する車載機に含まれるコンピュータによって実行可能なプログラムであって、
前記データ提供装置は、前記車両の現在位置が所定のルートから逸脱した場合に、該現在位置から目的地までの新たなルートを再取得するものであり、
前記プログラムの前記コンピュータによる実行は、前記コンピュータに、
前記データ提供装置から前記表示手段の画面に合わせたサイズの、前記ルートの案内に用いる複数の地図画像を順次に受信するステップと、
受信済の地図画像を記憶手段に記憶するステップと、
前記車両の現在位置が前記ルートから逸脱したことを検知するステップと、
前記車両の現在位置が前記ルートから逸脱したことを検知されない場合は一つの地図画像を用いた案内画面を前記表示手段に表示させるステップと、
前記現在位置が前記ルートから逸脱したことを検地される場合は前記記憶手段に記憶された複数の地図画像を用いた案内画面を前記表示手段に表示させるステップと、
を実行させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】

【図5】

【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】

【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2011−13113(P2011−13113A)
【公開日】平成23年1月20日(2011.1.20)
【国際特許分類】
【出願番号】特願2009−158060(P2009−158060)
【出願日】平成21年7月2日(2009.7.2)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成23年1月20日(2011.1.20)
【国際特許分類】
【出願日】平成21年7月2日(2009.7.2)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]