
ナビゲーションシステム、道路地図表示方法
【課題】目視されている光景とカメラによる撮影範囲の関連を運転者が把握容易なナビゲーションシステム及び道路地図表示方法を提供すること。
【解決手段】道路地図13に自車両の現在位置を表示するナビゲーションシステム100であって、現在位置と自車両周囲を撮影するカメラ25の画角に基づき撮影範囲を特定する撮影範囲特定手段31と、撮影範囲に対応する道路地図上の領域を決定する画像領域決定手段32と、領域を示すオブジェクト12を道路地図13に生成するオブジェクト生成手段35と、オブジェクト12を含む道路地図13を表示する表示手段37、29と、を有することを特徴とする。
【解決手段】道路地図13に自車両の現在位置を表示するナビゲーションシステム100であって、現在位置と自車両周囲を撮影するカメラ25の画角に基づき撮影範囲を特定する撮影範囲特定手段31と、撮影範囲に対応する道路地図上の領域を決定する画像領域決定手段32と、領域を示すオブジェクト12を道路地図13に生成するオブジェクト生成手段35と、オブジェクト12を含む道路地図13を表示する表示手段37、29と、を有することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路地図に自車両の現在位置を表示するナビゲーションシステムに関し、特に、カメラにより撮影される撮影範囲を呈示できるナビゲーションシステム及び道路地図表示方法に関する。
【背景技術】
【0002】
ナビゲーションシステムは、自車位置周辺の道路地図や目的地までの経路を道路地図上に強調して表示して運転者が走行方向を把握するための支援を行う。自車両の位置は道路地図に表示されるが、さらに目的地までの経路で右左折する際に右折方向又は左折方向を道路地図に表示するナビゲーションシステムが考案されている(例えば、特許文献1参照。)。特許文献1には、案内すべき交差点が連続する場合に、手前の交差点を拡大表示すると共に、その次の交差点の進行方向を矢印で案内するナビゲーション装置が開示されている。
【0003】
ところで、カメラが車載された車両では、カメラが撮影した画像を車内の表示装置に表示することができるようになっていることがある。例えば、ナイトビューと呼ばれるシステムでは、撮影された画像から歩行者を検出すると、画像内の歩行者を強調するよう画像処理して表示装置に表示することができる。
【0004】
また、車載されたカメラを利用して、カメラが撮影した画像データを位置情報に対応づけて記憶しておき、道路地図の走行軌跡に画像を表示する技術が考えられている(例えば、特許文献2参照。)。走行後、運転者は走行軌跡上の位置と画像の関連を容易に把握することができる。
【特許文献1】特許第3791196号公報
【特許文献2】特開平9−179491号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献2記載の画像処理システムでは、過去の画像を過去の走行軌跡に対応づけて表示するものであるため、実際にその場所を走行している際の運転支援にはならない。
【0006】
そこで、カメラを車載した車両では、カメラが撮影する画像と道路地図とを連携して表示して、画像と道路地図との関連を把握させながら運転者を誘導することが望まれる。しかし、カメラの画角は比較的狭いため、運転者に目視されている領域とカメラに撮影される領域とは異なり、カメラが撮影する画像を単に表示しても、撮影されている画像が道路地図のどのエリアなのかを把握することは困難である。
【0007】
また、カメラが撮影する画像には、歩行者や他車両などの物体が撮影されている場合があるが、物体との距離が近いと、物体の大きさや存在を確認できるタイミング(カメラは画角が狭いため、目視の方が早く物体を視認する)などが異なるため、目視した光景と画像とに相違があり、運転者が違和感を感じる場合があるという問題がある。また、他車両のような大きな物体がカメラの間近にある場合、画像のほとんどを他車両が占領してしまい、道路地図と連携させて表示しても運転者が戸惑うおそれがある。
【0008】
本発明は、上記課題に鑑み、目視されている光景とカメラによる撮影範囲の関連を運転者が把握容易なナビゲーションシステム及び道路地図表示方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題に鑑み、本発明は、道路地図に自車両の現在位置を表示するナビゲーションシステムであって、現在位置と自車両周囲を撮影するカメラの画角に基づき撮影範囲を特定する撮影範囲特定手段と、撮影範囲に対応する道路地図上の領域を決定する画像領域決定手段と、領域を示すオブジェクトを道路地図に生成するオブジェクト生成手段と、オブジェクトを含む道路地図を表示する表示手段と、を有することを特徴とする。
【発明の効果】
【0010】
目視されている光景とカメラによる撮影範囲の関連を運転者が把握容易なナビゲーションシステム及び道路地図表示方法を提供することができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明を実施するための最良の形態について図面を参照しながら、実施例を挙げて説明する。
【実施例1】
【0012】
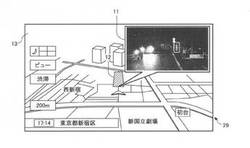
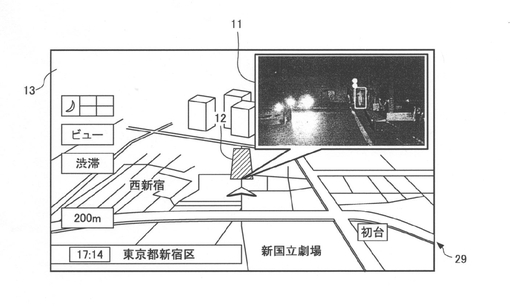
図1は、表示された道路地図13と道路地図13内に表示された画像11の一例を示す。本実施例のナビゲーションシステム100の特徴は、画像表示オブジェクト12が道路地図13に表示されることである。画像表示オブジェクト12は、カメラの撮影範囲を2D又は3Dのアイコンにて示すものである。
【0013】
図示するように、自車位置は画像表示オブジェクト12よりも紙面の手前側にある。したがって、運転席から目視できる目視エリアは自車位置から距離を置かずに拡がっている。これに対し、画像表示オブジェクト12は、カメラ25の画角(が狭いこと)を考慮して決定されているので、目視エリアよりも狭いカメラ25の撮影範囲だけを表示したものである。また、道路地図13は種々の縮尺で表示されるが、画像表示オブジェクト12は縮尺に応じて縮小・拡大されて表示される。
【0014】
このため、運転者は、道路地図13内に表示されている画像11が道路地図13上ではどの領域に相当するかを一目で把握することできる。目視した光景に対し画像11による撮影範囲が狭いことを視覚的に読み取れるので、目視している光景と画像11の関連も容易に把握することができる。
【0015】
〔ナビゲーションシステム100の構成〕
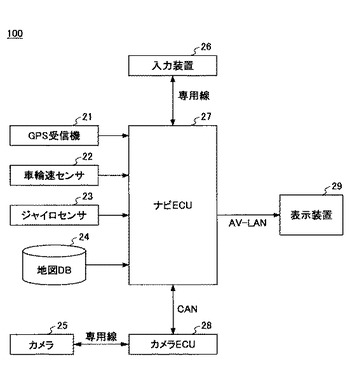
図2は、ナビゲーションシステム100のハードウェア構成図の一例を示す。ナビゲーションシステム100は、ナビECU(Electronic Control Unit)27により制御される。ナビECU27には、CANやFlexRay等の車載LAN、専用線、又は、AV−LANを介して、GPS(Global Positioning System)受信機、車輪速センサ22、ジャイロセンサ23、地図DB(Data Base)24、入力装置26、カメラECU28、及び、表示装置29が接続されている。
【0016】
GPS受信機21等はいずれも公知のものを利用でき、例えば、GPS受信機21は、4以上のGPS衛星からの電波の到達時間に基づき車両の位置(緯度・経度・標高)を決定する。車輪速センサ22は、例えば、車両の各輪が回転すると変化する磁束をパルスとして計測して、単位時間あたりのパルス数に基づき各輪毎に車輪速を計測する。車輪速にタイヤの外径を乗じれば車速が得られる。ジャイロセンサ23は、コリオリ力の作用により変化する震動片(電極間)の距離に基づき車両が路面に対しヨーイング方向又はピッチング方向に回転する時の角速度を検知する、MEMS(Micro Electro Mechanical Systems)を実体とする。検知結果を積分することで角度、すなわち3軸方向の進行方向に変換する。
【0017】
ナビECU27は、GPS受信機21により検出した位置を起点に、車輪速センサ22が検出する走行距離をジャイロセンサ23が検出する走行方位に累積して、自車両の位置を推定する自律航法により車両の現在位置を継続的に検出している。また、ナビECU27は、さらにマップマッチングによって自車両の位置を道路地図13の所定のリンクに対応づけ最終的な現在位置を確定している。
【0018】
地図DB24は、ノードテーブルとリンクテーブルを相互に対応づけた、実際の道路網に対応した道路地図13のデータベースである。ノードテーブルは、道路と道路が交差する交差点や道路の所定間隔毎の点、に関係する情報が登録されている。ノードテーブルは、ノード番号、ノードの位置情報(座標)、接続するノード数、接続する各ノードのノード番号、及び、ノードから接続するリンク番号、等の情報を有する。
【0019】
リンクテーブルは、ノードとノードを結ぶいわゆる道路に関係する情報が登録されている。リンクテーブルは、リンク番号、開始点ノード番号、終了点ノード番号、開始点緯度、開始点経度、終了点緯度、終了点経度、幅員、車線数、道路種別、交通規則等の情報を有する。したがって、ノード番号とリンク番号をそれぞれ辿ることで現実の道路に対応した道路網が形成される。
【0020】
この他、地図DB24には、ガソリンスタンド、駐車場、公共施設など施設のポイントデータが緯度・経度に対応づけて記憶されている。また、表示すべき住所や地番のポイントデータが緯度・経度に対応づけて記憶されている。このようなポイントデータは、それらを示す描画情報及び施設名や地名、道路名などの文字情報を有し、道路地図13には描画情報により形成されたアイコン、地名、道路名等が表示される。
【0021】
なお、地図DB24は、車両の出荷時又はナビゲーションシステム100の出荷時に、ハードディスクドライブなどに記憶された状態であってもよいし、ナビゲーションシステム100が車両に搭載された後に、その一部又は全部を所定のサーバからダウンロードして記憶してもよい。
【0022】
入力装置26は、ユーザがナビゲーションシステム100を操作する操作情報を入力するユーザインターフェイスであり、例えば、押しボタン式のキーボード、トラックボール、リモコン、表示装置29が備えるタッチパネル、及び、ユーザの発した音声を入力する音声認識装置等を実体とする。
【0023】
表示装置29は、ピクセル毎にRGB各色の輝度が制御された点の集合で道路地図13を形成する出力装置であり、例えば、センタークラスターに収容された液晶ディスプレイや有機EL等のフラットパネルディスプレイであり、これらとは別にHUD(Head Up Display)を備えていてもよい。
【0024】
〔カメラ25の画角と撮影範囲の関係〕
続いて、カメラ25の画角と撮影範囲の関係について説明する。カメラ25は、例えばルームミラーの裏側に、光軸を車両前方のやや下向きに向けて固定されている。カメラ25は白線認識や夜間の歩行者の検出に用いられる撮影装置であるが、それぞれに専用のカメラ25を搭載してもよく、フレーム毎にシャッタスピードや制御ゲイン等のカメラパラメータを切り替えて撮影することで両者を兼用してもよい。なお、夜間の撮影時には、ヘッドライトから近赤外線投光器により照明すると共に可視光線カットフィルタを有効にすることで、近赤外光を優先的に自車両の前方に照射する。これにより歩行者の検出が容易になる。
【0025】
カメラ25の画角は固定であることが多いが(例えば12度)、焦点距離を調整することで画角の調整が可能でもよい。画角が固定の場合は、撮影範囲も固定である。また、画角が可変であっても、画角は焦点距離から算出されるので、カメラ25の画角は常に検出可能である。したがって、ナビゲーションシステム100にとって撮影範囲は既知となる。
【0026】
図3(a)は車幅方向の画角と撮影範囲を模式的に説明する図の一例である。焦点距離と撮像素子の広さには、次の関係があることが知られている。
0.5×撮像素子の対角(イメージサークルの半径)= 焦点距離×(tan(θ1/2)
撮像素子の大きさと焦点距離は既知なので、画角θ1が算出できる。
【0027】
図示するように自車両からの距離Lが大きいほど車幅方向の撮影範囲は大きくなる関係から、車幅方向の撮影範囲は、「撮影範囲=L・画角θ1」で示される、カメラ25を中心とした扇形の領域となる。
【0028】
図3(b)は、上下方向の画角θ2と撮影範囲を模式的に説明する図の一例である。撮像素子は、上下方向にも同様に算出される画角θ2を有している。ここでカメラ25の光軸は水平よりやや下向きであり、下方向は路面が撮影されるだけなので、車高と画角θ2を考慮して上下方向の撮影範囲を特定できる。例えば、上下方向の撮影範囲は、「撮影範囲=車高+L・tan(α)」で表示される。但しαは画角θ2のうち水平方向より大きい角度である。以上から、車幅方向と上下方向の撮影範囲を重畳した領域が現実の撮影範囲となる。
【0029】
厳密にはこのように車幅方向と上下方向の撮影範囲を重畳した領域が撮影範囲であるが、上下方向の撮影範囲は路面や光軸の向きにより制限されるので、車幅方向の撮影範囲のみを考慮してもよい。この場合、画像表示オブジェクト12を3Dで表示するのであれば、上下方向の撮影範囲は車高と同程度とする。
【0030】
〔歩行者の検出〕
撮影された画像11には運転支援の種々の画像処理が施される。例えば、カメラECU28は、白線認識用の画像11から白線を認識し、幅員、中央線、道路の曲率等の白線情報を算出し、例えば車線逸脱防止の制御に提供する。また、カメラECU28は、夜間の歩行者を検出するナイトビュー用の画像11から、歩行者を検出し歩行者を矩形枠で囲むなどの強調処理を画像11に施して表示装置29に出力する。近赤外光が照射された歩行者は高輝度に撮影されるので、カメラECU28は高輝度の密集画素の形状を歩行者の標準的な形状とパターンマッチングする等の手法で歩行者を特定することができる。ナイトビューの画像11は、表示装置29の全面に表示されたり、図1に示したように道路地図13内に表示される。
【0031】
〔道路地図13の描画〕
続いて、道路地図13の描画について説明する。図4は、ナビゲーションシステム100の機能ブロック図の一例を示す。ナビECU27は、プログラムを実行するCPU、プログラム実行の作業領域となりまた一時的にデータを記憶するRAM、データのインターフェイスとなる入出力インターフェイス、ASIC(Application Specific Integrated Circuit)、カメラECU28等と通信するCANインターフェイス、イグニションオフしてもデータを保持する不揮発メモリ、プログラムを記憶するハードディスクやROM等がバスにより接続されたマイコンにより構成される。
【0032】
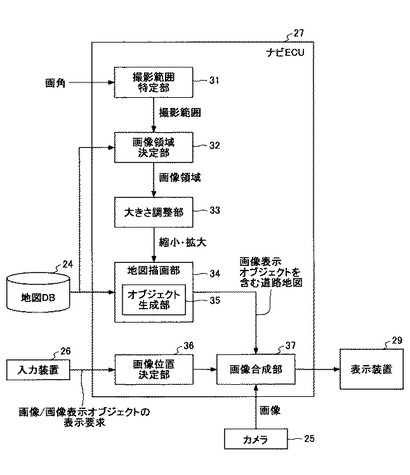
CPUがプログラムを実行するか又は特定のASICにより、図示する撮影範囲特定部31、画像領域決定部32、大きさ調整部33、地図描画部34、オブジェクト生成部35、画像位置決定部36及び画像合成部37が実現される。以下、各機能を詳細に説明する。
【0033】
まず、道路地図13の生成について説明する。地図描画部34は、現在位置を含む描画範囲(例えば数km四方)の道路地図13を生成する。
【0034】
地図描画部34は、縮尺と表示装置29の画素数に応じて定まる表示領域の道路地図13をいくつかのレイヤに分けて描画する。地図描画部34は、この表示領域に含まれるノードとノードに連結するリンクを地図DB24から読み出し、リンク長、リンク間の接続方向、幅員等に従い道路網を形成し1枚のレイヤに配置する。道路種別、幅員等に応じて各リンクの色は定められており、目的地までの案内ルート(各リンク)には所定の色が配色される。
【0035】
また、地図描画部34は、同じ表示領域におけるポイントデータから、公共施設のアイコン、宿泊施設のアイコン、ガソリンスタンドのアイコン、駅や線路のアイコンを、それぞれの位置情報に応じて別のレイヤに配置する。また、地図描画部34は別のレイヤに住所や地番の記号(文字)を配置する。また、所定のレイヤの車両の現在位置に自車両を示す自車両アイコンを配置する。
【0036】
また、タッチパネルの場合にはメニューボタンを表示するレイヤが用意され、地図描画部34は、予め定められた位置に各種のメニューボタンを形成したレイヤを生成する。また、このレイヤには、東西南北や時刻、等が形成される。
【0037】
このように、各レイヤを生成すると地図描画部34は、各レイヤを陰影処理して重畳して所定の解像度(例えば、640×480画素)の道路地図13を生成する。道路地図13だけを表示する場合、道路地図13のデータがVRAMに記憶され、表示装置29はVRAMのデータを読み出し所定リフレッシュレート毎に繰り返し表示する。一方、本実施例のように、道路地図13に画像11を合成して表示する場合、画像合成部37が、VRAMに道路地図13と画像11のデータを記憶することで両者を合成する。
【0038】
なお、例えば、ナビゲーションシステム100は、2D表示と3D表示を任意に又は交差点などの所定の場所で自動的に切り替えることができる。2D表示の場合、道路地図13の向きは北向きを上方に固定したり、進行方向を上向きに一致させるなど、運転者の設定に応じて切り替えられる。3D表示の場合は、生成した道路地図13を斜め上から見下ろした鳥瞰図に座標変換して表示する。3D表示の場合は、建物などの地物も高さや奥行きを有するように表示されるので、ポイントデータに記憶されている建物等の地物のポリゴンデータから3Dのアイコンをモデリングしレイヤに配置する。運転者や3D表示の設定から視点が指示されれば、アイコンの形状や位置から各アイコンをレンダリングして道路地図13のデータを生成できる。
【0039】
〔撮影範囲に応じた画像領域の決定〕
本実施形態のナビゲーションシステム100は、道路地図13に画像表示オブジェクト12を表示するので、画像領域決定部32は、道路地図13において撮影範囲に対応する画像領域を決定する。
【0040】
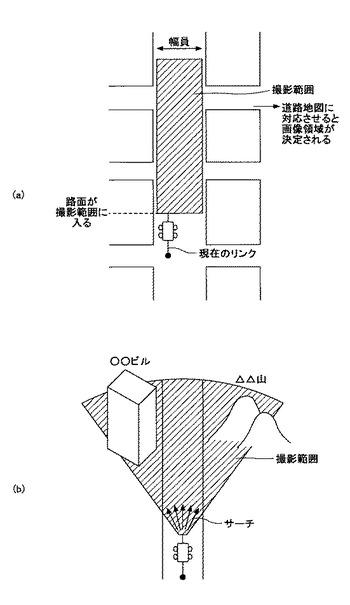
図5(a)は、撮影範囲を説明する図の一例である。撮影範囲は、自車両がマップマッピングされたリンクにおける自車両の位置を視点とするはずなので、撮影範囲特定部31は現在位置のリンクとリンク上の位置を特定する。また、撮影範囲特定部31は走行軌跡から車両の向きを特定する。撮影範囲特定部31は、この位置から図3にて説明した撮影範囲を撮影範囲に特定する。必要であれば事前に画角θ1を決定しておく。
【0041】
画像領域は、この撮影範囲を道路地図13に対応させることで決定できる。撮影範囲、自車位置、車両の向き、がそれぞれ特定されれば、画像領域決定部32は、例えば次のように画像領域を決定する。
・画像領域の前後方向は、例えば、路面が撮影範囲に入る位置から前方100m程度に決定する。路面が撮影範囲に入る位置は、画角θ2、光軸の向き、カメラ25の取り付け高さから決定される。
・車幅方向は幅員程度である。
【0042】
高さ方向の撮影範囲は、2D表示では考慮する必要がなく、3D表示では車高程度である。3D表示でも視点が十分に高いと画像領域の高さを無視できるので、高さ方向の撮影範囲を省略してもよい。このような画像領域が画像表示オブジェクト12として道路地図13に表示される。
【0043】
ところで、市街地では道路沿いに建物が並んでいるので、車幅方向の撮影範囲は幅員程度であるが、郊外では道路沿いに建物がなく、車幅方向の撮影範囲を幅員に限定すべきでない場合があるので、より好ましくは次のように撮影範囲を特定してから画像領域を決定する。
【0044】
図5(b)は、撮影範囲の特定を説明する図の別の一例を示す。撮影範囲特定部31は道路地図13を参照して自車両の現在位置を中心に、画角θ1の範囲を5〜10度程度の間隔で自車両より高い地物があるか否かをサーチする。一般の家屋の高さは車高よりも高いので、人工的な地物があるか否かを判定すればよい。地物が所定以上の密度で検出された場合(例えば、サーチにより3回連続して道路沿いの地物が検出された場合)、図5(a)のように撮影範囲は車幅程度にする。道路沿いの地物が検出されない場合、又は、地物がまばらな場合、撮影範囲特定部31は図5(b)のように扇状の撮影範囲を特定し、地物がある方向については最も近い地物までを撮影範囲に特定する。なお、市街地と郊外を区分しておき、車両の現在位置に応じて撮影範囲を切り替えてもよい。
【0045】
画像領域決定部32は、図5(a)の場合と同様に、この撮影範囲を道路地図13に対応させる。このように、撮影範囲を特定することで撮影範囲と画像表示オブジェクト12を一致させやすくなるので、郊外においても目視した光景と画像領域を一致させやすくすることができる。
【0046】
〔画像表示オブジェクト12の表示〕
画像領域のサイズは道路地図13の縮尺に応じたものとなるので、大きさ調整部33は、画像領域を道路地図13の縮尺に応じて調整する。すなわち、道路地図13の現在の縮尺と同じ縮尺になるよう縮小・拡大する。
【0047】
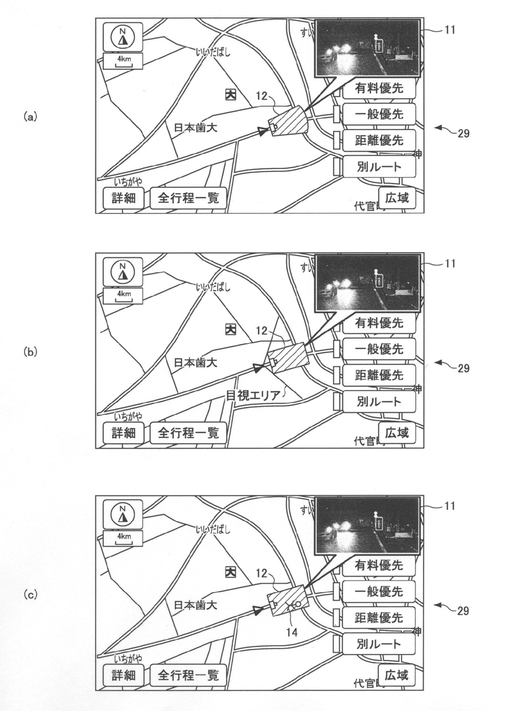
そして、地図描画部34のオブジェクト生成部35は、画像領域決定部32により決定された道路地図13の画像領域に、大きさ調整部33が調整した大きさで画像表示オブジェクト12を表示する。図6(a)は画像表示オブジェクト12の一例を示す。図6(a)は道路地図13を2D表示したものである。図6(a)では、自車両前方にカメラ25のアイコンを表示することで、そのアイコンが画像表示オブジェクト12であることを運転者に把握させている。なお、画像表示オブジェクト12は、どのレイヤに生成してもよいし新たにレイヤを設けてそこに生成してもよい。いずれにしても、適切な陰影処理により表示の有無を制御できる。
【0048】
図6(a)に図示する以外にも、画像表示オブジェクト12は、矩形領域に車線を施したもの、道路地図13が透視できるよう所定の透過率が設定されたもの、所定の色で塗りつぶして表示したもの、矩形領域の枠のみを強調したもの等、運転者や乗員が画像表示オブジェクト12であることを把握できるように表示されればよい。なお、画像表示オブジェクト12の態様は予め運転者が選択できるようになっている。
【0049】
また、画像表示オブジェクト12だけでなく、目視された光景を模式的に道路地図13に示してもよい。以下、目視された光景の道路地図13上の領域を目視エリアという。図6(b)は目視エリアと画像表示オブジェクト12が示された道路地図13の一例を示す図である。目視エリアは、運転者の視野に依存するので運転者の視野と完全に一致させることは困難であるが、画角よりも広い場合がほとんどである。また、一般的な人間の視野角は最大で180度程度であるが、走行中はこれより狭くなり、走行中は左右のAピラーの間が目視エリアと考えられる。したがって、運転席から左右のAピラーを結ぶ角度を目視エリアと見積もることができる。この目視エリアを運転席のシートの前後位置で補正すれば更に正確な目視エリアを見積もることができる。
【0050】
図示するように、目視エリアよりも画像表示オブジェクト12の方が狭いことから、目視した光景に対し画像11による撮影範囲が狭いことを運転者が視覚的に読み取ることができる。したがって、目視している光景と画像11の関連も容易に把握することができる。
【0051】
また、ナイトビューでは歩行者を検出するので、撮影範囲に歩行者がいれば画像11で歩行者が強調して表示される。この場合、歩行者までの正確な距離はステレオカメラやレーダを用いないと不明であるが、横方向における歩行者の画像11内における歩行者の位置から既知である。また、画像11内における歩行者の大きさから歩行者までのおよその距離は算出できる。例えば、歩行者の伸長(ピクセル数)に係数を乗じて歩行者までのおよその距離を算出する。このように、歩行者の位置を特定できれば、画像表示オブジェクト12に歩行者のおよその位置をアイコンで表示できる。
【0052】
図6(c)は、歩行者アイコン14を含む画像表示オブジェクト12の一例を示す図である。歩行者アイコン14の位置から、運転者は歩行者のおよその位置を把握できる。画像表示オブジェクト12と画像11は同じ画面に表示され、画像11内で強調して表示される歩行者アイコン14のおよその位置が画像表示オブジェクト12の中で示されれば、運転者は画像11と道路地図13の対応を把握しやすくなる。
【0053】
〔画像11の表示〕
カメラ25が撮影した画像11の表示について説明する。表示装置29における画像11の画像表示エリア(図1では表示装置29の右上)は、予め定められていてもよいし、画像表示オブジェクト12から最も近い四隅のいずれかに自動的に決定されてもよい。画像表示エリアの大きさは例えば表示装置29のピクセル数の1/4〜1/8程度に決まっているか、又は、例えばタッチパネルを利用して画像11の枠を運転者がドラッグすることで拡大・縮小できる。
【0054】
例えば、道路地図13を表示装置29の全面に表示した状態で、入力装置26から道路地図13内に画像11を表示する指示が入力されると(例えば、カメラ25のスイッチがオンになると)、予め定められた大きさの画像11の表示リアを、画像位置決定部36は道路地図13内に決定する。この時点で、画像表示オブジェクト12が同時に表示されるか、画像11だけが表示されるかは、ナビゲーションシステム100の設定次第である。
【0055】
また、画像11はカメラ25が撮影した画像11よりも縮小して表示されるので、画像合成部37は画像11の大きさを画像表示エリアの大きさに応じて縮小する。画像合成部37はカメラ25が撮影した画像11のデータを、例えば、縦方向に画素の2つ毎に画素値を1つ抽出し、横方向に2つ毎に1つ抽出することでサイズを1/4に縮小する。
【0056】
そして、画像合成部37は、道路地図13と画像11を合成して表示装置29に表示する。画像合成部37は、画像位置決定部36が決定した画像表示エリアに対応する、VRAMのアドレスを道路地図13に優先して確保する。この場合、画像表示エリアには道路地図13は表示されないが、半透明状に道路地図13を表示してもよい。また、画像合成部37は確保したアドレスに、サイズを縮小した画像11のデータを格納する。表示装置29は、走査順に画像11のデータ及び道路地図13のデータ、及び、垂直同期信号や水平同期信号を読み出して道路地図13と画像11を表示する。
【0057】
なお、道路地図13に画像11を表示する態様はいくつか考えられる。例えば、画像表示オブジェクト12のみ表示する、画像11のみ表示する、画像表示オブジェクト12と画像11を同時に表示する等である。本実施例では、ユーザの入力装置26の操作により切り替えることができるようになっている。カメラ25のスイッチを入れることで引出線で結ばれた画像11と画像表示オブジェクト12がいずれも表示された場合、運転者が画像11にタッチすれば画像11のみが消去され、運転者が画像表示オブジェクト12にタッチすれば画像表示オブジェクト12のみが消去される。また、例えば画像11のあった場所をタッチすると、画像11と画像表示オブジェクト12がいずれも表示される。
【0058】
また、例えば、カメラ25のスイッチを入れることで画像11のみが表示された場合、運転者が画像11にタッチすると引出し線で結ばれた画像表示オブジェクト12が一緒に表示される。この場合、画像表示オブジェクト12にタッチすると画像表示オブジェクト12が消去され、画像11にタッチすると画像11が消去される。また、画像表示オブジェクト12だけが表示された状態で画像表示オブジェクト12にタッチすると、吹き出しのように道路地図13内に画像11が表示される。
【0059】
なお、本実施例では道路地図13と画像11を同じ表示装置29に表示したが、道路地図と画像11を別の表示装置(例えば、道路地図を液晶ディスプレイで、画像11をHUDで)でそれぞれ表示してもよい。この場合でも、ナビゲーションシステム100が道路地図13には画像表示オブジェクト12を表示することで、運転者は撮影範囲と目視された光景の関係を把握できる。
【0060】
街中などで縮尺率最小表示の場合はバードビューなどの画面に、画像表示オブジェクト12を生成せずに、位置関係が合うように画像の拡大縮小変換を行い、直接貼り付けてもよい。
【0061】
〔ナビゲーションシステム100の表示手順〕
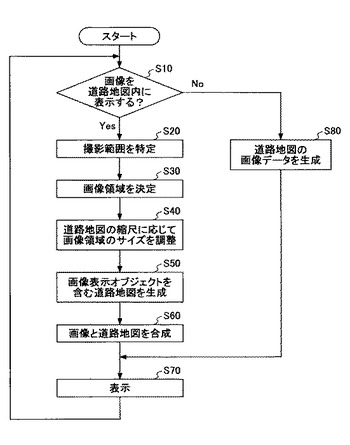
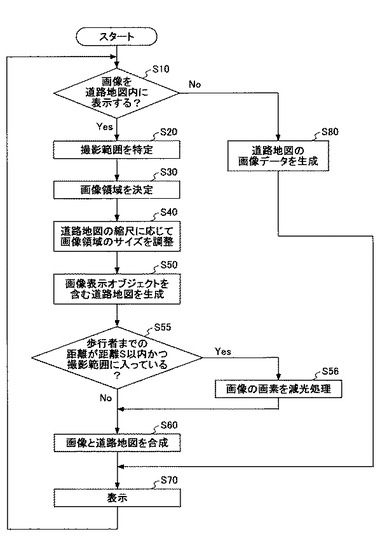
図7は、本実施例のナビゲーションシステム100が、画像表示オブジェクト12を表示する手順を示すフローチャート図の一例である。図7のフローチャート図は、道路地図13を表示する際繰り返し実行される。
【0062】
まず、画像位置決定部36は、画像11を表示するか否かを判定する(S10)。画像11を表示するのは、例えば、運転者が入力装置26から画像11を表示する操作を入力した場合である。画像11を表示しない場合(S10のNo)、地図描画部34は、縮尺と表示装置29の画素数に応じて、レイヤ毎に道路網、施設のアイコン、住所や地番の記号(文字)、メニューアイコン等を配置すると共に、車両の現在位置に自車両アイコンを配置して道路地図13のデータを生成する(S80)。そして、画像合成部37は道路地図13のみを表示装置29に表示する(S70)。
【0063】
画像11を表示する場合(S10のYes)、撮影範囲特定部31はまず撮影範囲を特定する(S20)。撮影範囲特定部31は、周囲に高い地物があるか否かをサーチして撮影範囲を道路沿いの長方形とするか扇形状とするかを決定する。
【0064】
また、画像領域決定部32は、道路地図13において撮影範囲に対応する画像領域を決定する(S30)。画像領域は長方形又は扇形状である。
【0065】
大きさ調整部33は、道路地図13の縮尺に応じて画像領域のサイズを調整する(S40)。そして、地図描画部34は調整されたサイズの画像表示オブジェクト12を所定のレイヤに生成し道路地図13を生成する(S50)。
【0066】
生成された道路地図13のデータは画像合成部37に送出され、画像合成部37は、縮小表示部が縮小した画像11と道路地図13のデータを合成する(S60)。表示装置29は、道路地図13と画像11を1つの画面で表示する(S70)。
【0067】
本実施例のナビゲーションシステム100によれば、道路地図13に画像表示オブジェクト12を表示することで、道路地図13内に表示されている画像11が道路地図13上ではどの領域に相当するかを運転者は一目で把握することできる。目視した光景に対し画像11による撮影範囲が狭いことを視覚的に読み取れるので、目視している光景と画像11の関連も容易に把握することができる。
【実施例2】
【0068】
車載されるカメラ25は画角が比較的狭いため、カメラ25の近くで車両などの物体が撮影されるほど、運転者は目視された光景と画像11との差異を大きく感じる。本実施例では、このような差異を極力低減して画像11を表示するナビゲーションシステム100について説明する。
【0069】
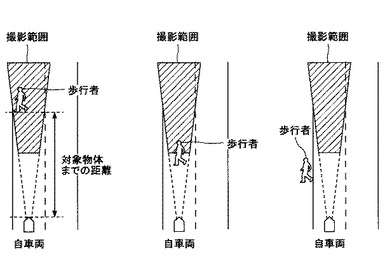
図8は、本実施例のナビゲーションシステム100による画像11の表示方法を模式的に示す図の一例である。図8(a)は自車両と歩行者の距離が中程度〜遠方の場合を、図8(b)は自車両と歩行者の距離が小さい場合を、図8(c)は撮影範囲に歩行者が含まれない場合を、それぞれ示す。図8(a)に示すように、歩行者が中程度の距離から遠方にかけて存在する場合、画像11に表示される歩行者と、目視される歩行者とはそれほど違和感なく運転者が認識できる。このため、自車両と歩行者の距離が中程度〜遠方の場合、実施例1と同様に表示する。
【0070】
一方、図8(b)に示すように自車両と歩行者の距離が小さい場合、目視された歩行者と比較して、画像11の歩行者は頭部や脚部の一部が画角外となり、画面外にはみ出た状態で提示されるため、違和感を感じる原因となる。また、歩行者が目視されてから歩行者が画角に入り画像11でも確認できるようになるまでタイムラグがあるなど、運転者は目視と画像11の関係を把握しにくい。そこで、このような場合、本実施例では画像11に運転者の視線が向かないように画像処理する(以下、かかる画像処理を不喚起処理という)。こうすることで、運転者が目視された光景と画像11の違いに違和感を感じることを防止できる。
【0071】
また、図8(c)に示すように撮影範囲に歩行者が存在しない場合、画像11にも歩行者が含まれないので、運転者が違和感を感じることはなく実施例1と同様に画像11を表示する。
【0072】
〔歩行者の位置と不喚起処理の関係〕
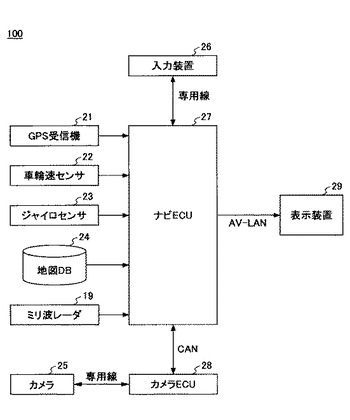
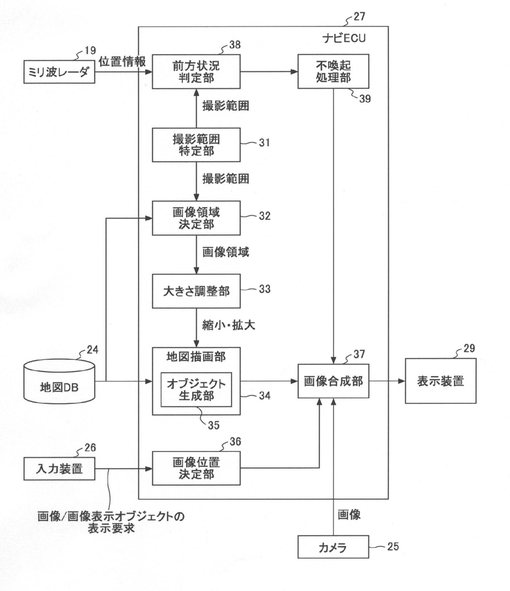
図9は、本実施例のナビゲーションシステム100のハードウェア構成図の一例を示す。なお、図9において図2と同一部には同一の符号を付しその説明は省略する。本実施例のナビゲーションシステム100は、ミリ波レーダ19を有する。ミリ波レーダ19は、ミリ波帯のレーダ送受信装置をフロントグリル内に配置したもので、送信波が歩行者に反射して受信されるまでの時間により自車と歩行者の距離を検出する。また、ミリ波レーダ19は、車長方向を中心に左右方向の所定角度範囲(例えば、左右に各15度の範囲)を走査しながらパルス状に送信波を照射するので、歩行者の存在する方向も検出することができる。以下、歩行者までの距離と方向を歩行者の位置情報という。なお、歩行者の位置情報は、ミリ波レーダ19でなくレーザレーダやステレオカメラの視差情報から算出してもよい。
【0073】
図10は、本実施例におけるナビゲーションシステム100の機能ブロック図の一例を示す。なお、図10において図4と同一部には同一の符号を付しその説明は省略する。本実施例のナビゲーションシステム100は、自車両の前方の状況を判定する前方状況判定部38を有する。前方状況判定部38は、ミリ波レーダ19が検出する歩行者の位置情報と、画像領域決定部32が特定した撮影範囲に基づき、前方の状況を判定する。
【0074】
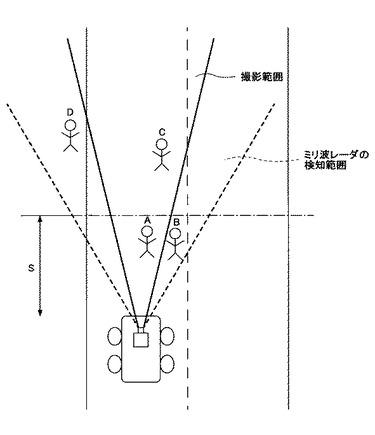
図11は、撮影範囲とミリ波レーダ19の検知範囲を模式的に示す図の一例である。ミリ波レーダ19の検知範囲は左右に各15度程度であるので、一般には歩行者が撮影範囲に入る前に歩行者との距離を検出できる。なお、図11では距離S以内を近距離とする。
・歩行者Aは近距離で検出され、撮影範囲に含まれるので、運転者に違和感を与えないよう、画像11は不喚起処理される。
・歩行者Bは近距離で検出されるが、撮影範囲に含まれないので、画像11は不喚起処理されない。
・歩行者Cは近距離で検出されないので、撮影範囲に含まれても、画像11は不喚起処理されない。
・歩行者Dは近距離で検出されず撮影範囲にも含まれないので、画像11は不喚起処理されない。
【0075】
このように前方状況判定部38は、距離S以内の歩行者が撮影範囲に含まれる場合、不喚起処理部39に画像11を不喚起処理するよう要求する。
【0076】
〔不喚起処理〕
不喚起処理について説明する。不喚起処理は、運転者の視線が表示装置29に向きにくくする処理である。例えば、画面のうち画像11の部分の減光、画像11の部分へのメッセージの表示、画像11そのものの表示の停止(道路地図13を全面に表示)、画像11の更なる縮小等である。画像11の一部分を減光する場合、例えば、画像11の画素値の全てを一律小さくする。こうすることで、画像11の色調を留めたまま、表示装置29の一部のみを減光したのと同様の効果が得られる。また、カメラ25が撮影する際にシャッタスピードを速くしたりゲインを小さくするなどして画像11を暗くしてもよい。
【0077】
また、メッセージを表示する場合、例えば「現在、目視された光景に対し違和感の大きい画像が表示されています。」「見ないでください」「画像を参考にしないでください」等の文字を表示する。また、表示でなく、音声メッセージをスピーカから出力してもよい。
【0078】
不喚起処理部39は、このような予め定められた態様で画像11に不喚起処理を施す。そして、画像合成部37は実施例1と同様に道路地図13に画像11を合成して表示する。
【0079】
図12は、本実施例のナビゲーションシステム100が、画像表示オブジェクト12を表示する手順を示すフローチャート図の一例である。図12のフローチャート図は、道路地図13を表示する際繰り返し実行される。
【0080】
なお、図12おいて図7と同一ステップには同一の符号を付しその説明は簡単に行う。本実施例では、撮影範囲の特定(S20)、画像領域の決定(S30)、道路地図13の縮尺に応じた画像領域のサイズの調整(S40)、道路地図13の生成(S50)までは実施例1と同様である。
【0081】
ついで、本実施例では、前方状況判定部38が、歩行者までの距離が距離S以内かつ歩行者が撮影範囲に入っているか否かを判定する(S55)。この条件を満たす場合、不喚起処理部39は、画像11の画素に対し例えば減光処理を施す(S56)。
【0082】
以降の処理は実施例1と同様であり、画像合成部37は、縮小後、減光処理された画像11と道路地図13を合成する(S60)。表示装置29は、道路地図13と画像11を1つの画面で表示する(S70)。
【0083】
本実施例によれば、歩行者までの距離を検出して、歩行者との距離が近い場合には画像11に不喚起処理を施すことで、運転者が目視された光景と画像11の違いに違和感を感じることを防止できる。
【図面の簡単な説明】
【0084】
【図1】表示された道路地図と道路地図内に表示された画像の一例を示す図である。
【図2】ナビゲーションシステムのハードウェア構成図の一例である。
【図3】撮影範囲を模式的に説明する図の一例である。
【図4】ナビゲーションシステムの機能ブロック図の一例である。
【図5】撮影範囲を説明する図の一例である。
【図6】画像表示オブジェクトの一例を示す図である。
【図7】ナビゲーションシステムが、画像表示オブジェクトを表示する手順を示すフローチャート図の一例である。
【図8】ナビゲーションシステムによる画像の表示方法を模式的に示す図の一例である(実施例2)。
【図9】ナビゲーションシステムのハードウェア構成図の一例である(実施例2)。
【図10】ナビゲーションシステムの機能ブロック図の一例である(実施例2)。
【図11】撮影範囲とミリ波レーダの検知範囲を模式的に示す図の一例である。
【図12】ナビゲーションシステムが、画像表示オブジェクトを表示する手順を示すフローチャート図の一例である(実施例2)。
【符号の説明】
【0085】
11 画像
12 画像表示オブジェクト
13 道路地図
21 GPS受信機
22 車輪速センサ
23 ジャイロセンサ
24 地図DB
25 カメラ
26 入力装置
27 ナビECU
29 表示装置
100 ナビゲーションシステム
【技術分野】
【0001】
本発明は、道路地図に自車両の現在位置を表示するナビゲーションシステムに関し、特に、カメラにより撮影される撮影範囲を呈示できるナビゲーションシステム及び道路地図表示方法に関する。
【背景技術】
【0002】
ナビゲーションシステムは、自車位置周辺の道路地図や目的地までの経路を道路地図上に強調して表示して運転者が走行方向を把握するための支援を行う。自車両の位置は道路地図に表示されるが、さらに目的地までの経路で右左折する際に右折方向又は左折方向を道路地図に表示するナビゲーションシステムが考案されている(例えば、特許文献1参照。)。特許文献1には、案内すべき交差点が連続する場合に、手前の交差点を拡大表示すると共に、その次の交差点の進行方向を矢印で案内するナビゲーション装置が開示されている。
【0003】
ところで、カメラが車載された車両では、カメラが撮影した画像を車内の表示装置に表示することができるようになっていることがある。例えば、ナイトビューと呼ばれるシステムでは、撮影された画像から歩行者を検出すると、画像内の歩行者を強調するよう画像処理して表示装置に表示することができる。
【0004】
また、車載されたカメラを利用して、カメラが撮影した画像データを位置情報に対応づけて記憶しておき、道路地図の走行軌跡に画像を表示する技術が考えられている(例えば、特許文献2参照。)。走行後、運転者は走行軌跡上の位置と画像の関連を容易に把握することができる。
【特許文献1】特許第3791196号公報
【特許文献2】特開平9−179491号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献2記載の画像処理システムでは、過去の画像を過去の走行軌跡に対応づけて表示するものであるため、実際にその場所を走行している際の運転支援にはならない。
【0006】
そこで、カメラを車載した車両では、カメラが撮影する画像と道路地図とを連携して表示して、画像と道路地図との関連を把握させながら運転者を誘導することが望まれる。しかし、カメラの画角は比較的狭いため、運転者に目視されている領域とカメラに撮影される領域とは異なり、カメラが撮影する画像を単に表示しても、撮影されている画像が道路地図のどのエリアなのかを把握することは困難である。
【0007】
また、カメラが撮影する画像には、歩行者や他車両などの物体が撮影されている場合があるが、物体との距離が近いと、物体の大きさや存在を確認できるタイミング(カメラは画角が狭いため、目視の方が早く物体を視認する)などが異なるため、目視した光景と画像とに相違があり、運転者が違和感を感じる場合があるという問題がある。また、他車両のような大きな物体がカメラの間近にある場合、画像のほとんどを他車両が占領してしまい、道路地図と連携させて表示しても運転者が戸惑うおそれがある。
【0008】
本発明は、上記課題に鑑み、目視されている光景とカメラによる撮影範囲の関連を運転者が把握容易なナビゲーションシステム及び道路地図表示方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題に鑑み、本発明は、道路地図に自車両の現在位置を表示するナビゲーションシステムであって、現在位置と自車両周囲を撮影するカメラの画角に基づき撮影範囲を特定する撮影範囲特定手段と、撮影範囲に対応する道路地図上の領域を決定する画像領域決定手段と、領域を示すオブジェクトを道路地図に生成するオブジェクト生成手段と、オブジェクトを含む道路地図を表示する表示手段と、を有することを特徴とする。
【発明の効果】
【0010】
目視されている光景とカメラによる撮影範囲の関連を運転者が把握容易なナビゲーションシステム及び道路地図表示方法を提供することができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明を実施するための最良の形態について図面を参照しながら、実施例を挙げて説明する。
【実施例1】
【0012】
図1は、表示された道路地図13と道路地図13内に表示された画像11の一例を示す。本実施例のナビゲーションシステム100の特徴は、画像表示オブジェクト12が道路地図13に表示されることである。画像表示オブジェクト12は、カメラの撮影範囲を2D又は3Dのアイコンにて示すものである。
【0013】
図示するように、自車位置は画像表示オブジェクト12よりも紙面の手前側にある。したがって、運転席から目視できる目視エリアは自車位置から距離を置かずに拡がっている。これに対し、画像表示オブジェクト12は、カメラ25の画角(が狭いこと)を考慮して決定されているので、目視エリアよりも狭いカメラ25の撮影範囲だけを表示したものである。また、道路地図13は種々の縮尺で表示されるが、画像表示オブジェクト12は縮尺に応じて縮小・拡大されて表示される。
【0014】
このため、運転者は、道路地図13内に表示されている画像11が道路地図13上ではどの領域に相当するかを一目で把握することできる。目視した光景に対し画像11による撮影範囲が狭いことを視覚的に読み取れるので、目視している光景と画像11の関連も容易に把握することができる。
【0015】
〔ナビゲーションシステム100の構成〕
図2は、ナビゲーションシステム100のハードウェア構成図の一例を示す。ナビゲーションシステム100は、ナビECU(Electronic Control Unit)27により制御される。ナビECU27には、CANやFlexRay等の車載LAN、専用線、又は、AV−LANを介して、GPS(Global Positioning System)受信機、車輪速センサ22、ジャイロセンサ23、地図DB(Data Base)24、入力装置26、カメラECU28、及び、表示装置29が接続されている。
【0016】
GPS受信機21等はいずれも公知のものを利用でき、例えば、GPS受信機21は、4以上のGPS衛星からの電波の到達時間に基づき車両の位置(緯度・経度・標高)を決定する。車輪速センサ22は、例えば、車両の各輪が回転すると変化する磁束をパルスとして計測して、単位時間あたりのパルス数に基づき各輪毎に車輪速を計測する。車輪速にタイヤの外径を乗じれば車速が得られる。ジャイロセンサ23は、コリオリ力の作用により変化する震動片(電極間)の距離に基づき車両が路面に対しヨーイング方向又はピッチング方向に回転する時の角速度を検知する、MEMS(Micro Electro Mechanical Systems)を実体とする。検知結果を積分することで角度、すなわち3軸方向の進行方向に変換する。
【0017】
ナビECU27は、GPS受信機21により検出した位置を起点に、車輪速センサ22が検出する走行距離をジャイロセンサ23が検出する走行方位に累積して、自車両の位置を推定する自律航法により車両の現在位置を継続的に検出している。また、ナビECU27は、さらにマップマッチングによって自車両の位置を道路地図13の所定のリンクに対応づけ最終的な現在位置を確定している。
【0018】
地図DB24は、ノードテーブルとリンクテーブルを相互に対応づけた、実際の道路網に対応した道路地図13のデータベースである。ノードテーブルは、道路と道路が交差する交差点や道路の所定間隔毎の点、に関係する情報が登録されている。ノードテーブルは、ノード番号、ノードの位置情報(座標)、接続するノード数、接続する各ノードのノード番号、及び、ノードから接続するリンク番号、等の情報を有する。
【0019】
リンクテーブルは、ノードとノードを結ぶいわゆる道路に関係する情報が登録されている。リンクテーブルは、リンク番号、開始点ノード番号、終了点ノード番号、開始点緯度、開始点経度、終了点緯度、終了点経度、幅員、車線数、道路種別、交通規則等の情報を有する。したがって、ノード番号とリンク番号をそれぞれ辿ることで現実の道路に対応した道路網が形成される。
【0020】
この他、地図DB24には、ガソリンスタンド、駐車場、公共施設など施設のポイントデータが緯度・経度に対応づけて記憶されている。また、表示すべき住所や地番のポイントデータが緯度・経度に対応づけて記憶されている。このようなポイントデータは、それらを示す描画情報及び施設名や地名、道路名などの文字情報を有し、道路地図13には描画情報により形成されたアイコン、地名、道路名等が表示される。
【0021】
なお、地図DB24は、車両の出荷時又はナビゲーションシステム100の出荷時に、ハードディスクドライブなどに記憶された状態であってもよいし、ナビゲーションシステム100が車両に搭載された後に、その一部又は全部を所定のサーバからダウンロードして記憶してもよい。
【0022】
入力装置26は、ユーザがナビゲーションシステム100を操作する操作情報を入力するユーザインターフェイスであり、例えば、押しボタン式のキーボード、トラックボール、リモコン、表示装置29が備えるタッチパネル、及び、ユーザの発した音声を入力する音声認識装置等を実体とする。
【0023】
表示装置29は、ピクセル毎にRGB各色の輝度が制御された点の集合で道路地図13を形成する出力装置であり、例えば、センタークラスターに収容された液晶ディスプレイや有機EL等のフラットパネルディスプレイであり、これらとは別にHUD(Head Up Display)を備えていてもよい。
【0024】
〔カメラ25の画角と撮影範囲の関係〕
続いて、カメラ25の画角と撮影範囲の関係について説明する。カメラ25は、例えばルームミラーの裏側に、光軸を車両前方のやや下向きに向けて固定されている。カメラ25は白線認識や夜間の歩行者の検出に用いられる撮影装置であるが、それぞれに専用のカメラ25を搭載してもよく、フレーム毎にシャッタスピードや制御ゲイン等のカメラパラメータを切り替えて撮影することで両者を兼用してもよい。なお、夜間の撮影時には、ヘッドライトから近赤外線投光器により照明すると共に可視光線カットフィルタを有効にすることで、近赤外光を優先的に自車両の前方に照射する。これにより歩行者の検出が容易になる。
【0025】
カメラ25の画角は固定であることが多いが(例えば12度)、焦点距離を調整することで画角の調整が可能でもよい。画角が固定の場合は、撮影範囲も固定である。また、画角が可変であっても、画角は焦点距離から算出されるので、カメラ25の画角は常に検出可能である。したがって、ナビゲーションシステム100にとって撮影範囲は既知となる。
【0026】
図3(a)は車幅方向の画角と撮影範囲を模式的に説明する図の一例である。焦点距離と撮像素子の広さには、次の関係があることが知られている。
0.5×撮像素子の対角(イメージサークルの半径)= 焦点距離×(tan(θ1/2)
撮像素子の大きさと焦点距離は既知なので、画角θ1が算出できる。
【0027】
図示するように自車両からの距離Lが大きいほど車幅方向の撮影範囲は大きくなる関係から、車幅方向の撮影範囲は、「撮影範囲=L・画角θ1」で示される、カメラ25を中心とした扇形の領域となる。
【0028】
図3(b)は、上下方向の画角θ2と撮影範囲を模式的に説明する図の一例である。撮像素子は、上下方向にも同様に算出される画角θ2を有している。ここでカメラ25の光軸は水平よりやや下向きであり、下方向は路面が撮影されるだけなので、車高と画角θ2を考慮して上下方向の撮影範囲を特定できる。例えば、上下方向の撮影範囲は、「撮影範囲=車高+L・tan(α)」で表示される。但しαは画角θ2のうち水平方向より大きい角度である。以上から、車幅方向と上下方向の撮影範囲を重畳した領域が現実の撮影範囲となる。
【0029】
厳密にはこのように車幅方向と上下方向の撮影範囲を重畳した領域が撮影範囲であるが、上下方向の撮影範囲は路面や光軸の向きにより制限されるので、車幅方向の撮影範囲のみを考慮してもよい。この場合、画像表示オブジェクト12を3Dで表示するのであれば、上下方向の撮影範囲は車高と同程度とする。
【0030】
〔歩行者の検出〕
撮影された画像11には運転支援の種々の画像処理が施される。例えば、カメラECU28は、白線認識用の画像11から白線を認識し、幅員、中央線、道路の曲率等の白線情報を算出し、例えば車線逸脱防止の制御に提供する。また、カメラECU28は、夜間の歩行者を検出するナイトビュー用の画像11から、歩行者を検出し歩行者を矩形枠で囲むなどの強調処理を画像11に施して表示装置29に出力する。近赤外光が照射された歩行者は高輝度に撮影されるので、カメラECU28は高輝度の密集画素の形状を歩行者の標準的な形状とパターンマッチングする等の手法で歩行者を特定することができる。ナイトビューの画像11は、表示装置29の全面に表示されたり、図1に示したように道路地図13内に表示される。
【0031】
〔道路地図13の描画〕
続いて、道路地図13の描画について説明する。図4は、ナビゲーションシステム100の機能ブロック図の一例を示す。ナビECU27は、プログラムを実行するCPU、プログラム実行の作業領域となりまた一時的にデータを記憶するRAM、データのインターフェイスとなる入出力インターフェイス、ASIC(Application Specific Integrated Circuit)、カメラECU28等と通信するCANインターフェイス、イグニションオフしてもデータを保持する不揮発メモリ、プログラムを記憶するハードディスクやROM等がバスにより接続されたマイコンにより構成される。
【0032】
CPUがプログラムを実行するか又は特定のASICにより、図示する撮影範囲特定部31、画像領域決定部32、大きさ調整部33、地図描画部34、オブジェクト生成部35、画像位置決定部36及び画像合成部37が実現される。以下、各機能を詳細に説明する。
【0033】
まず、道路地図13の生成について説明する。地図描画部34は、現在位置を含む描画範囲(例えば数km四方)の道路地図13を生成する。
【0034】
地図描画部34は、縮尺と表示装置29の画素数に応じて定まる表示領域の道路地図13をいくつかのレイヤに分けて描画する。地図描画部34は、この表示領域に含まれるノードとノードに連結するリンクを地図DB24から読み出し、リンク長、リンク間の接続方向、幅員等に従い道路網を形成し1枚のレイヤに配置する。道路種別、幅員等に応じて各リンクの色は定められており、目的地までの案内ルート(各リンク)には所定の色が配色される。
【0035】
また、地図描画部34は、同じ表示領域におけるポイントデータから、公共施設のアイコン、宿泊施設のアイコン、ガソリンスタンドのアイコン、駅や線路のアイコンを、それぞれの位置情報に応じて別のレイヤに配置する。また、地図描画部34は別のレイヤに住所や地番の記号(文字)を配置する。また、所定のレイヤの車両の現在位置に自車両を示す自車両アイコンを配置する。
【0036】
また、タッチパネルの場合にはメニューボタンを表示するレイヤが用意され、地図描画部34は、予め定められた位置に各種のメニューボタンを形成したレイヤを生成する。また、このレイヤには、東西南北や時刻、等が形成される。
【0037】
このように、各レイヤを生成すると地図描画部34は、各レイヤを陰影処理して重畳して所定の解像度(例えば、640×480画素)の道路地図13を生成する。道路地図13だけを表示する場合、道路地図13のデータがVRAMに記憶され、表示装置29はVRAMのデータを読み出し所定リフレッシュレート毎に繰り返し表示する。一方、本実施例のように、道路地図13に画像11を合成して表示する場合、画像合成部37が、VRAMに道路地図13と画像11のデータを記憶することで両者を合成する。
【0038】
なお、例えば、ナビゲーションシステム100は、2D表示と3D表示を任意に又は交差点などの所定の場所で自動的に切り替えることができる。2D表示の場合、道路地図13の向きは北向きを上方に固定したり、進行方向を上向きに一致させるなど、運転者の設定に応じて切り替えられる。3D表示の場合は、生成した道路地図13を斜め上から見下ろした鳥瞰図に座標変換して表示する。3D表示の場合は、建物などの地物も高さや奥行きを有するように表示されるので、ポイントデータに記憶されている建物等の地物のポリゴンデータから3Dのアイコンをモデリングしレイヤに配置する。運転者や3D表示の設定から視点が指示されれば、アイコンの形状や位置から各アイコンをレンダリングして道路地図13のデータを生成できる。
【0039】
〔撮影範囲に応じた画像領域の決定〕
本実施形態のナビゲーションシステム100は、道路地図13に画像表示オブジェクト12を表示するので、画像領域決定部32は、道路地図13において撮影範囲に対応する画像領域を決定する。
【0040】
図5(a)は、撮影範囲を説明する図の一例である。撮影範囲は、自車両がマップマッピングされたリンクにおける自車両の位置を視点とするはずなので、撮影範囲特定部31は現在位置のリンクとリンク上の位置を特定する。また、撮影範囲特定部31は走行軌跡から車両の向きを特定する。撮影範囲特定部31は、この位置から図3にて説明した撮影範囲を撮影範囲に特定する。必要であれば事前に画角θ1を決定しておく。
【0041】
画像領域は、この撮影範囲を道路地図13に対応させることで決定できる。撮影範囲、自車位置、車両の向き、がそれぞれ特定されれば、画像領域決定部32は、例えば次のように画像領域を決定する。
・画像領域の前後方向は、例えば、路面が撮影範囲に入る位置から前方100m程度に決定する。路面が撮影範囲に入る位置は、画角θ2、光軸の向き、カメラ25の取り付け高さから決定される。
・車幅方向は幅員程度である。
【0042】
高さ方向の撮影範囲は、2D表示では考慮する必要がなく、3D表示では車高程度である。3D表示でも視点が十分に高いと画像領域の高さを無視できるので、高さ方向の撮影範囲を省略してもよい。このような画像領域が画像表示オブジェクト12として道路地図13に表示される。
【0043】
ところで、市街地では道路沿いに建物が並んでいるので、車幅方向の撮影範囲は幅員程度であるが、郊外では道路沿いに建物がなく、車幅方向の撮影範囲を幅員に限定すべきでない場合があるので、より好ましくは次のように撮影範囲を特定してから画像領域を決定する。
【0044】
図5(b)は、撮影範囲の特定を説明する図の別の一例を示す。撮影範囲特定部31は道路地図13を参照して自車両の現在位置を中心に、画角θ1の範囲を5〜10度程度の間隔で自車両より高い地物があるか否かをサーチする。一般の家屋の高さは車高よりも高いので、人工的な地物があるか否かを判定すればよい。地物が所定以上の密度で検出された場合(例えば、サーチにより3回連続して道路沿いの地物が検出された場合)、図5(a)のように撮影範囲は車幅程度にする。道路沿いの地物が検出されない場合、又は、地物がまばらな場合、撮影範囲特定部31は図5(b)のように扇状の撮影範囲を特定し、地物がある方向については最も近い地物までを撮影範囲に特定する。なお、市街地と郊外を区分しておき、車両の現在位置に応じて撮影範囲を切り替えてもよい。
【0045】
画像領域決定部32は、図5(a)の場合と同様に、この撮影範囲を道路地図13に対応させる。このように、撮影範囲を特定することで撮影範囲と画像表示オブジェクト12を一致させやすくなるので、郊外においても目視した光景と画像領域を一致させやすくすることができる。
【0046】
〔画像表示オブジェクト12の表示〕
画像領域のサイズは道路地図13の縮尺に応じたものとなるので、大きさ調整部33は、画像領域を道路地図13の縮尺に応じて調整する。すなわち、道路地図13の現在の縮尺と同じ縮尺になるよう縮小・拡大する。
【0047】
そして、地図描画部34のオブジェクト生成部35は、画像領域決定部32により決定された道路地図13の画像領域に、大きさ調整部33が調整した大きさで画像表示オブジェクト12を表示する。図6(a)は画像表示オブジェクト12の一例を示す。図6(a)は道路地図13を2D表示したものである。図6(a)では、自車両前方にカメラ25のアイコンを表示することで、そのアイコンが画像表示オブジェクト12であることを運転者に把握させている。なお、画像表示オブジェクト12は、どのレイヤに生成してもよいし新たにレイヤを設けてそこに生成してもよい。いずれにしても、適切な陰影処理により表示の有無を制御できる。
【0048】
図6(a)に図示する以外にも、画像表示オブジェクト12は、矩形領域に車線を施したもの、道路地図13が透視できるよう所定の透過率が設定されたもの、所定の色で塗りつぶして表示したもの、矩形領域の枠のみを強調したもの等、運転者や乗員が画像表示オブジェクト12であることを把握できるように表示されればよい。なお、画像表示オブジェクト12の態様は予め運転者が選択できるようになっている。
【0049】
また、画像表示オブジェクト12だけでなく、目視された光景を模式的に道路地図13に示してもよい。以下、目視された光景の道路地図13上の領域を目視エリアという。図6(b)は目視エリアと画像表示オブジェクト12が示された道路地図13の一例を示す図である。目視エリアは、運転者の視野に依存するので運転者の視野と完全に一致させることは困難であるが、画角よりも広い場合がほとんどである。また、一般的な人間の視野角は最大で180度程度であるが、走行中はこれより狭くなり、走行中は左右のAピラーの間が目視エリアと考えられる。したがって、運転席から左右のAピラーを結ぶ角度を目視エリアと見積もることができる。この目視エリアを運転席のシートの前後位置で補正すれば更に正確な目視エリアを見積もることができる。
【0050】
図示するように、目視エリアよりも画像表示オブジェクト12の方が狭いことから、目視した光景に対し画像11による撮影範囲が狭いことを運転者が視覚的に読み取ることができる。したがって、目視している光景と画像11の関連も容易に把握することができる。
【0051】
また、ナイトビューでは歩行者を検出するので、撮影範囲に歩行者がいれば画像11で歩行者が強調して表示される。この場合、歩行者までの正確な距離はステレオカメラやレーダを用いないと不明であるが、横方向における歩行者の画像11内における歩行者の位置から既知である。また、画像11内における歩行者の大きさから歩行者までのおよその距離は算出できる。例えば、歩行者の伸長(ピクセル数)に係数を乗じて歩行者までのおよその距離を算出する。このように、歩行者の位置を特定できれば、画像表示オブジェクト12に歩行者のおよその位置をアイコンで表示できる。
【0052】
図6(c)は、歩行者アイコン14を含む画像表示オブジェクト12の一例を示す図である。歩行者アイコン14の位置から、運転者は歩行者のおよその位置を把握できる。画像表示オブジェクト12と画像11は同じ画面に表示され、画像11内で強調して表示される歩行者アイコン14のおよその位置が画像表示オブジェクト12の中で示されれば、運転者は画像11と道路地図13の対応を把握しやすくなる。
【0053】
〔画像11の表示〕
カメラ25が撮影した画像11の表示について説明する。表示装置29における画像11の画像表示エリア(図1では表示装置29の右上)は、予め定められていてもよいし、画像表示オブジェクト12から最も近い四隅のいずれかに自動的に決定されてもよい。画像表示エリアの大きさは例えば表示装置29のピクセル数の1/4〜1/8程度に決まっているか、又は、例えばタッチパネルを利用して画像11の枠を運転者がドラッグすることで拡大・縮小できる。
【0054】
例えば、道路地図13を表示装置29の全面に表示した状態で、入力装置26から道路地図13内に画像11を表示する指示が入力されると(例えば、カメラ25のスイッチがオンになると)、予め定められた大きさの画像11の表示リアを、画像位置決定部36は道路地図13内に決定する。この時点で、画像表示オブジェクト12が同時に表示されるか、画像11だけが表示されるかは、ナビゲーションシステム100の設定次第である。
【0055】
また、画像11はカメラ25が撮影した画像11よりも縮小して表示されるので、画像合成部37は画像11の大きさを画像表示エリアの大きさに応じて縮小する。画像合成部37はカメラ25が撮影した画像11のデータを、例えば、縦方向に画素の2つ毎に画素値を1つ抽出し、横方向に2つ毎に1つ抽出することでサイズを1/4に縮小する。
【0056】
そして、画像合成部37は、道路地図13と画像11を合成して表示装置29に表示する。画像合成部37は、画像位置決定部36が決定した画像表示エリアに対応する、VRAMのアドレスを道路地図13に優先して確保する。この場合、画像表示エリアには道路地図13は表示されないが、半透明状に道路地図13を表示してもよい。また、画像合成部37は確保したアドレスに、サイズを縮小した画像11のデータを格納する。表示装置29は、走査順に画像11のデータ及び道路地図13のデータ、及び、垂直同期信号や水平同期信号を読み出して道路地図13と画像11を表示する。
【0057】
なお、道路地図13に画像11を表示する態様はいくつか考えられる。例えば、画像表示オブジェクト12のみ表示する、画像11のみ表示する、画像表示オブジェクト12と画像11を同時に表示する等である。本実施例では、ユーザの入力装置26の操作により切り替えることができるようになっている。カメラ25のスイッチを入れることで引出線で結ばれた画像11と画像表示オブジェクト12がいずれも表示された場合、運転者が画像11にタッチすれば画像11のみが消去され、運転者が画像表示オブジェクト12にタッチすれば画像表示オブジェクト12のみが消去される。また、例えば画像11のあった場所をタッチすると、画像11と画像表示オブジェクト12がいずれも表示される。
【0058】
また、例えば、カメラ25のスイッチを入れることで画像11のみが表示された場合、運転者が画像11にタッチすると引出し線で結ばれた画像表示オブジェクト12が一緒に表示される。この場合、画像表示オブジェクト12にタッチすると画像表示オブジェクト12が消去され、画像11にタッチすると画像11が消去される。また、画像表示オブジェクト12だけが表示された状態で画像表示オブジェクト12にタッチすると、吹き出しのように道路地図13内に画像11が表示される。
【0059】
なお、本実施例では道路地図13と画像11を同じ表示装置29に表示したが、道路地図と画像11を別の表示装置(例えば、道路地図を液晶ディスプレイで、画像11をHUDで)でそれぞれ表示してもよい。この場合でも、ナビゲーションシステム100が道路地図13には画像表示オブジェクト12を表示することで、運転者は撮影範囲と目視された光景の関係を把握できる。
【0060】
街中などで縮尺率最小表示の場合はバードビューなどの画面に、画像表示オブジェクト12を生成せずに、位置関係が合うように画像の拡大縮小変換を行い、直接貼り付けてもよい。
【0061】
〔ナビゲーションシステム100の表示手順〕
図7は、本実施例のナビゲーションシステム100が、画像表示オブジェクト12を表示する手順を示すフローチャート図の一例である。図7のフローチャート図は、道路地図13を表示する際繰り返し実行される。
【0062】
まず、画像位置決定部36は、画像11を表示するか否かを判定する(S10)。画像11を表示するのは、例えば、運転者が入力装置26から画像11を表示する操作を入力した場合である。画像11を表示しない場合(S10のNo)、地図描画部34は、縮尺と表示装置29の画素数に応じて、レイヤ毎に道路網、施設のアイコン、住所や地番の記号(文字)、メニューアイコン等を配置すると共に、車両の現在位置に自車両アイコンを配置して道路地図13のデータを生成する(S80)。そして、画像合成部37は道路地図13のみを表示装置29に表示する(S70)。
【0063】
画像11を表示する場合(S10のYes)、撮影範囲特定部31はまず撮影範囲を特定する(S20)。撮影範囲特定部31は、周囲に高い地物があるか否かをサーチして撮影範囲を道路沿いの長方形とするか扇形状とするかを決定する。
【0064】
また、画像領域決定部32は、道路地図13において撮影範囲に対応する画像領域を決定する(S30)。画像領域は長方形又は扇形状である。
【0065】
大きさ調整部33は、道路地図13の縮尺に応じて画像領域のサイズを調整する(S40)。そして、地図描画部34は調整されたサイズの画像表示オブジェクト12を所定のレイヤに生成し道路地図13を生成する(S50)。
【0066】
生成された道路地図13のデータは画像合成部37に送出され、画像合成部37は、縮小表示部が縮小した画像11と道路地図13のデータを合成する(S60)。表示装置29は、道路地図13と画像11を1つの画面で表示する(S70)。
【0067】
本実施例のナビゲーションシステム100によれば、道路地図13に画像表示オブジェクト12を表示することで、道路地図13内に表示されている画像11が道路地図13上ではどの領域に相当するかを運転者は一目で把握することできる。目視した光景に対し画像11による撮影範囲が狭いことを視覚的に読み取れるので、目視している光景と画像11の関連も容易に把握することができる。
【実施例2】
【0068】
車載されるカメラ25は画角が比較的狭いため、カメラ25の近くで車両などの物体が撮影されるほど、運転者は目視された光景と画像11との差異を大きく感じる。本実施例では、このような差異を極力低減して画像11を表示するナビゲーションシステム100について説明する。
【0069】
図8は、本実施例のナビゲーションシステム100による画像11の表示方法を模式的に示す図の一例である。図8(a)は自車両と歩行者の距離が中程度〜遠方の場合を、図8(b)は自車両と歩行者の距離が小さい場合を、図8(c)は撮影範囲に歩行者が含まれない場合を、それぞれ示す。図8(a)に示すように、歩行者が中程度の距離から遠方にかけて存在する場合、画像11に表示される歩行者と、目視される歩行者とはそれほど違和感なく運転者が認識できる。このため、自車両と歩行者の距離が中程度〜遠方の場合、実施例1と同様に表示する。
【0070】
一方、図8(b)に示すように自車両と歩行者の距離が小さい場合、目視された歩行者と比較して、画像11の歩行者は頭部や脚部の一部が画角外となり、画面外にはみ出た状態で提示されるため、違和感を感じる原因となる。また、歩行者が目視されてから歩行者が画角に入り画像11でも確認できるようになるまでタイムラグがあるなど、運転者は目視と画像11の関係を把握しにくい。そこで、このような場合、本実施例では画像11に運転者の視線が向かないように画像処理する(以下、かかる画像処理を不喚起処理という)。こうすることで、運転者が目視された光景と画像11の違いに違和感を感じることを防止できる。
【0071】
また、図8(c)に示すように撮影範囲に歩行者が存在しない場合、画像11にも歩行者が含まれないので、運転者が違和感を感じることはなく実施例1と同様に画像11を表示する。
【0072】
〔歩行者の位置と不喚起処理の関係〕
図9は、本実施例のナビゲーションシステム100のハードウェア構成図の一例を示す。なお、図9において図2と同一部には同一の符号を付しその説明は省略する。本実施例のナビゲーションシステム100は、ミリ波レーダ19を有する。ミリ波レーダ19は、ミリ波帯のレーダ送受信装置をフロントグリル内に配置したもので、送信波が歩行者に反射して受信されるまでの時間により自車と歩行者の距離を検出する。また、ミリ波レーダ19は、車長方向を中心に左右方向の所定角度範囲(例えば、左右に各15度の範囲)を走査しながらパルス状に送信波を照射するので、歩行者の存在する方向も検出することができる。以下、歩行者までの距離と方向を歩行者の位置情報という。なお、歩行者の位置情報は、ミリ波レーダ19でなくレーザレーダやステレオカメラの視差情報から算出してもよい。
【0073】
図10は、本実施例におけるナビゲーションシステム100の機能ブロック図の一例を示す。なお、図10において図4と同一部には同一の符号を付しその説明は省略する。本実施例のナビゲーションシステム100は、自車両の前方の状況を判定する前方状況判定部38を有する。前方状況判定部38は、ミリ波レーダ19が検出する歩行者の位置情報と、画像領域決定部32が特定した撮影範囲に基づき、前方の状況を判定する。
【0074】
図11は、撮影範囲とミリ波レーダ19の検知範囲を模式的に示す図の一例である。ミリ波レーダ19の検知範囲は左右に各15度程度であるので、一般には歩行者が撮影範囲に入る前に歩行者との距離を検出できる。なお、図11では距離S以内を近距離とする。
・歩行者Aは近距離で検出され、撮影範囲に含まれるので、運転者に違和感を与えないよう、画像11は不喚起処理される。
・歩行者Bは近距離で検出されるが、撮影範囲に含まれないので、画像11は不喚起処理されない。
・歩行者Cは近距離で検出されないので、撮影範囲に含まれても、画像11は不喚起処理されない。
・歩行者Dは近距離で検出されず撮影範囲にも含まれないので、画像11は不喚起処理されない。
【0075】
このように前方状況判定部38は、距離S以内の歩行者が撮影範囲に含まれる場合、不喚起処理部39に画像11を不喚起処理するよう要求する。
【0076】
〔不喚起処理〕
不喚起処理について説明する。不喚起処理は、運転者の視線が表示装置29に向きにくくする処理である。例えば、画面のうち画像11の部分の減光、画像11の部分へのメッセージの表示、画像11そのものの表示の停止(道路地図13を全面に表示)、画像11の更なる縮小等である。画像11の一部分を減光する場合、例えば、画像11の画素値の全てを一律小さくする。こうすることで、画像11の色調を留めたまま、表示装置29の一部のみを減光したのと同様の効果が得られる。また、カメラ25が撮影する際にシャッタスピードを速くしたりゲインを小さくするなどして画像11を暗くしてもよい。
【0077】
また、メッセージを表示する場合、例えば「現在、目視された光景に対し違和感の大きい画像が表示されています。」「見ないでください」「画像を参考にしないでください」等の文字を表示する。また、表示でなく、音声メッセージをスピーカから出力してもよい。
【0078】
不喚起処理部39は、このような予め定められた態様で画像11に不喚起処理を施す。そして、画像合成部37は実施例1と同様に道路地図13に画像11を合成して表示する。
【0079】
図12は、本実施例のナビゲーションシステム100が、画像表示オブジェクト12を表示する手順を示すフローチャート図の一例である。図12のフローチャート図は、道路地図13を表示する際繰り返し実行される。
【0080】
なお、図12おいて図7と同一ステップには同一の符号を付しその説明は簡単に行う。本実施例では、撮影範囲の特定(S20)、画像領域の決定(S30)、道路地図13の縮尺に応じた画像領域のサイズの調整(S40)、道路地図13の生成(S50)までは実施例1と同様である。
【0081】
ついで、本実施例では、前方状況判定部38が、歩行者までの距離が距離S以内かつ歩行者が撮影範囲に入っているか否かを判定する(S55)。この条件を満たす場合、不喚起処理部39は、画像11の画素に対し例えば減光処理を施す(S56)。
【0082】
以降の処理は実施例1と同様であり、画像合成部37は、縮小後、減光処理された画像11と道路地図13を合成する(S60)。表示装置29は、道路地図13と画像11を1つの画面で表示する(S70)。
【0083】
本実施例によれば、歩行者までの距離を検出して、歩行者との距離が近い場合には画像11に不喚起処理を施すことで、運転者が目視された光景と画像11の違いに違和感を感じることを防止できる。
【図面の簡単な説明】
【0084】
【図1】表示された道路地図と道路地図内に表示された画像の一例を示す図である。
【図2】ナビゲーションシステムのハードウェア構成図の一例である。
【図3】撮影範囲を模式的に説明する図の一例である。
【図4】ナビゲーションシステムの機能ブロック図の一例である。
【図5】撮影範囲を説明する図の一例である。
【図6】画像表示オブジェクトの一例を示す図である。
【図7】ナビゲーションシステムが、画像表示オブジェクトを表示する手順を示すフローチャート図の一例である。
【図8】ナビゲーションシステムによる画像の表示方法を模式的に示す図の一例である(実施例2)。
【図9】ナビゲーションシステムのハードウェア構成図の一例である(実施例2)。
【図10】ナビゲーションシステムの機能ブロック図の一例である(実施例2)。
【図11】撮影範囲とミリ波レーダの検知範囲を模式的に示す図の一例である。
【図12】ナビゲーションシステムが、画像表示オブジェクトを表示する手順を示すフローチャート図の一例である(実施例2)。
【符号の説明】
【0085】
11 画像
12 画像表示オブジェクト
13 道路地図
21 GPS受信機
22 車輪速センサ
23 ジャイロセンサ
24 地図DB
25 カメラ
26 入力装置
27 ナビECU
29 表示装置
100 ナビゲーションシステム
【特許請求の範囲】
【請求項1】
道路地図に自車両の現在位置を表示するナビゲーションシステムであって、
前記現在位置と自車両周囲を撮影するカメラの画角に基づき撮影範囲を特定する撮影範囲特定手段と、
前記撮影範囲に対応する道路地図上の領域を決定する画像領域決定手段と、
前記領域を示すオブジェクトを道路地図に生成するオブジェクト生成手段と、
前記オブジェクトを含む道路地図を表示する表示手段と、
を有することを特徴とするナビゲーションシステム。
【請求項2】
前記表示手段は、前記カメラにより撮影された画像を、前記オブジェクトと関連付けて道路地図内に表示する、
ことを特徴とする請求項1記載のナビゲーションシステム。
【請求項3】
自車両に対する障害物の位置を検出する位置検出手段と、
前記障害物までの距離が所定値以下、かつ、前記障害物が前記撮影範囲に含まれているか否かを判定する前方状況判定手段と、
前記障害物までの距離が所定値以下、かつ、前記障害物が前記撮影範囲に含まれていると判定された場合、視認性を低下させる処理を前記画像に施す不喚起処理手段と、
を有することを特徴とする請求項2記載のナビゲーションシステム。
【請求項4】
カメラにより撮影された前記画像から歩行者が検出された場合、前記画像の歩行者を強調する処理を該画像に施す画像処理手段、
を有することを特徴とする請求項2記載のナビゲーションシステム。
【請求項5】
前記画像から歩行者が検出された場合、前記オブジェクト生成手段は、歩行者を示すアイコンを含む前記オブジェクトを生成する、
ことを特徴とする請求項4記載のナビゲーションシステム。
【請求項6】
前記オブジェクト生成手段は、市街地では矩形領域の前記オブジェクトを生成し、郊外では扇形の前記オブジェクトを生成する、
ことを特徴とする請求項1〜5いずれか1項記載のナビゲーションシステム。
【請求項7】
前記オブジェクト生成手段は、前記オブジェクトと共に運転席から視認される目視エリアのアイコンを道路地図に生成する、
ことを特徴とする請求項1〜6いずれか1項記載のナビゲーションシステム。
【請求項8】
前記道路地図が二次元表示又は三次元表示のいずれかの表示態様に切り替えて表示可能な場合、
前記オブジェクト生成手段は、前記表示態様に応じて二次元又は三次元の前記オブジェクトを生成する、
ことを特徴とする請求項1〜7いずれか1項記載のナビゲーションシステム。
【請求項9】
前記オブジェクトは前記画像からの引出線と共に表示される、
ことを特徴とする請求項2記載のナビゲーションシステム。
【請求項10】
前記表示手段が運転者の接触位置を検出するタッチパネルを有する場合、
前記画像への接触が検出されると、前記オブジェクト生成手段は前記オブジェクトを道路地図に生成する、
ことを特徴とする請求項2記載のナビゲーションシステム。
【請求項11】
前記カメラのスイッチがオンになると、
前記オブジェクト生成手段は前記オブジェクトを道路地図に生成する、
ことを特徴とする請求項2記載のナビゲーションシステム。
【請求項12】
自車両の現在位置を表示装置に表示する道路地図表示方法であって、
前記現在位置と自車両周囲を撮影するカメラの画角に基づき撮影範囲を特定するステップと、
前記撮影範囲に対応する道路地図上の領域を決定するステップと、
前記領域を示すオブジェクトを道路地図に生成するステップと、
前記オブジェクトを含む道路地図を表示するステップと、
を有することを特徴とする道路地図表示方法。
【請求項1】
道路地図に自車両の現在位置を表示するナビゲーションシステムであって、
前記現在位置と自車両周囲を撮影するカメラの画角に基づき撮影範囲を特定する撮影範囲特定手段と、
前記撮影範囲に対応する道路地図上の領域を決定する画像領域決定手段と、
前記領域を示すオブジェクトを道路地図に生成するオブジェクト生成手段と、
前記オブジェクトを含む道路地図を表示する表示手段と、
を有することを特徴とするナビゲーションシステム。
【請求項2】
前記表示手段は、前記カメラにより撮影された画像を、前記オブジェクトと関連付けて道路地図内に表示する、
ことを特徴とする請求項1記載のナビゲーションシステム。
【請求項3】
自車両に対する障害物の位置を検出する位置検出手段と、
前記障害物までの距離が所定値以下、かつ、前記障害物が前記撮影範囲に含まれているか否かを判定する前方状況判定手段と、
前記障害物までの距離が所定値以下、かつ、前記障害物が前記撮影範囲に含まれていると判定された場合、視認性を低下させる処理を前記画像に施す不喚起処理手段と、
を有することを特徴とする請求項2記載のナビゲーションシステム。
【請求項4】
カメラにより撮影された前記画像から歩行者が検出された場合、前記画像の歩行者を強調する処理を該画像に施す画像処理手段、
を有することを特徴とする請求項2記載のナビゲーションシステム。
【請求項5】
前記画像から歩行者が検出された場合、前記オブジェクト生成手段は、歩行者を示すアイコンを含む前記オブジェクトを生成する、
ことを特徴とする請求項4記載のナビゲーションシステム。
【請求項6】
前記オブジェクト生成手段は、市街地では矩形領域の前記オブジェクトを生成し、郊外では扇形の前記オブジェクトを生成する、
ことを特徴とする請求項1〜5いずれか1項記載のナビゲーションシステム。
【請求項7】
前記オブジェクト生成手段は、前記オブジェクトと共に運転席から視認される目視エリアのアイコンを道路地図に生成する、
ことを特徴とする請求項1〜6いずれか1項記載のナビゲーションシステム。
【請求項8】
前記道路地図が二次元表示又は三次元表示のいずれかの表示態様に切り替えて表示可能な場合、
前記オブジェクト生成手段は、前記表示態様に応じて二次元又は三次元の前記オブジェクトを生成する、
ことを特徴とする請求項1〜7いずれか1項記載のナビゲーションシステム。
【請求項9】
前記オブジェクトは前記画像からの引出線と共に表示される、
ことを特徴とする請求項2記載のナビゲーションシステム。
【請求項10】
前記表示手段が運転者の接触位置を検出するタッチパネルを有する場合、
前記画像への接触が検出されると、前記オブジェクト生成手段は前記オブジェクトを道路地図に生成する、
ことを特徴とする請求項2記載のナビゲーションシステム。
【請求項11】
前記カメラのスイッチがオンになると、
前記オブジェクト生成手段は前記オブジェクトを道路地図に生成する、
ことを特徴とする請求項2記載のナビゲーションシステム。
【請求項12】
自車両の現在位置を表示装置に表示する道路地図表示方法であって、
前記現在位置と自車両周囲を撮影するカメラの画角に基づき撮影範囲を特定するステップと、
前記撮影範囲に対応する道路地図上の領域を決定するステップと、
前記領域を示すオブジェクトを道路地図に生成するステップと、
前記オブジェクトを含む道路地図を表示するステップと、
を有することを特徴とする道路地図表示方法。
【図2】


【図3】

【図4】
【図5】
【図7】
【図8】
【図9】
【図11】
【図12】
【図1】
【図6】
【図10】
【図3】
【図4】
【図5】
【図7】
【図8】
【図9】
【図11】
【図12】
【図1】
【図6】
【図10】
【公開番号】特開2010−185761(P2010−185761A)
【公開日】平成22年8月26日(2010.8.26)
【国際特許分類】
【出願番号】特願2009−29765(P2009−29765)
【出願日】平成21年2月12日(2009.2.12)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
【公開日】平成22年8月26日(2010.8.26)
【国際特許分類】
【出願日】平成21年2月12日(2009.2.12)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
[ Back to top ]