
ナビゲーションシステム、道路決定方法、及び、地図データ構造
【課題】ユーザに負担を掛けることなく出発道路をより正確に決定することができるナビゲーションシステムを提供する。
【解決手段】出発地を表す情報を用いて該地図データを検索し、当該出発地周辺の道路の情報を少なくとも一つ取得する第一の道路取得手段と、該地図データ上における距離であって、第一の道路取得手段により取得された道路上の点であり出発地に最も近い最近接点と該出発地との距離を算出する第一の距離算出手段と、該地図データ上において該出発地と該最近接点とを結ぶ直線上に車両が通行できない場所が存在するか否かを判定する第一の道路判定手段と、第一の距離算出手段による算出結果及び第一の道路判定手段による判定結果に基づいて出発道路を決定する出発道路決定手段とを備えたナビゲーションシステムを提供する。
【解決手段】出発地を表す情報を用いて該地図データを検索し、当該出発地周辺の道路の情報を少なくとも一つ取得する第一の道路取得手段と、該地図データ上における距離であって、第一の道路取得手段により取得された道路上の点であり出発地に最も近い最近接点と該出発地との距離を算出する第一の距離算出手段と、該地図データ上において該出発地と該最近接点とを結ぶ直線上に車両が通行できない場所が存在するか否かを判定する第一の道路判定手段と、第一の距離算出手段による算出結果及び第一の道路判定手段による判定結果に基づいて出発道路を決定する出発道路決定手段とを備えたナビゲーションシステムを提供する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、所定の地図データを参照して経路検索を行うナビゲーションシステムに関する。また、所定の地図データを参照して経路を検索する際の出発道路を決定する道路決定方法に関する。更には、コンピュータに、経路検索のための出発道路及び目的道路を決定させるための地図データ構造に関する。
【背景技術】
【0002】
車両の現在位置から目的地までの経路案内を行うナビゲーションシステムが広く知られ実用に供されている。例えば下記特許文献1には、険しい山や深い川等の通行不可能な場所を避けて経路検索を行うことが可能なナビゲーションシステムが開示されている。
【特許文献1】特願2005−265464号公報
【0003】
上記特許文献1を始めとする種々のナビゲーションシステムでは、一般に、ダイクストラ法と呼ばれるロジックに基づいて経路検索が実行される。より詳細には、ダイクストラ法において経路検索は、道路を構成するリンクを通過するために必要な仕事量を示すリンクコストに基づいた計算により行われる。二つの分岐点を結ぶ各リンクには、距離や道路の種類に応じてそれぞれ異なる重み付けが成されている。附言するに、ダイクストラ法においてはリンクコストの総和が最小となる経路(すなわち現在地から目的地を結ぶリンクの連続)が最適な経路として選択される。
【0004】
ダイクストラ法により経路検索を行う場合には先ず、車両が位置する(又はその近傍の)道路(以下、「出発道路」と略記)と、その目的地近傍の道路(以下、「目的道路」と略記)を決定する必要がある。これら出発道路及び目的道路を決定するにあたり、ナビゲーションシステムが持つ地図データ内に存在する道路上に車両又は目的地が位置しない場合、当該地図データに含まれる道路データの中から、車両の現在位置に最も近い道路が出発道路、目的地に最も近い道路が目的道路として設定される。そして出発道路上において車両に最も近い地点が経路の始点、目的道路上において目的地に最も近い地点が経路の終点として設定されて経路検索が実行される。
【発明の開示】
【発明が解決しようとする課題】
【0005】
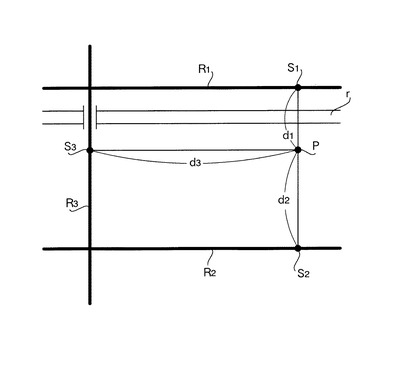
しかし、上述のように出発道路や目的道路を決定した場合、以下に示される問題が起こり得る。図1を参照してこの問題について説明する。
【0006】
図1に示される例によれば車両は位置Pに停止している。そしてその脇には河川rが流れている。また道路R1、R2、R3が車両の三方を囲むように敷設されている。このような状況において上記のアルゴリズムにしたがった経路検索が実行された場合、出発道路を決定するために道路R1、R2、R3の各々と位置Pとの距離(より正確には、位置Pを通る各道路の法線と交わる当該各道路上の地点S1、S2、S3と、位置Pとの距離d1、d2、d3)が求められる。図1に示される例ではd1<d2<d3である。このため出発道路が道路R1に決定され、経路の始点が地点S1に設定される。これにより、地点S1から始まる経路の検索が実行されることになる。
【0007】
ところが車両と道路R1との間には河川rが流れている。図1に示されるように、車両が地点S1に到達するためには、例えば河川rに入って向こう岸に直接渡る方法が挙げられる。しかしこの方法は現実的ではない。従って車両が地点S1に到達するためには先ず、他の道路を走行するより他ない。すなわち地点S1から始まる経路は誤ったものであると言える。
【0008】
この問題は目的地においても起こり得る。例えば図1の位置Pを目的地に置き換えて考えると、先と同様にやはり道路R1が目的道路に決定されて、地点S1が経路の終点に設定されることが分かる。実際には地点S2やS3等が終点に設定されるべきであり、地点S1を終点とする経路も誤ったものであると言える。
【0009】
つまり上記アルゴリズムでは、ユーザに対して誤った経路が提示されてしまうことがある。すなわち上記のような従来のナビゲーションシステムでは、経路の始点や終点が誤って設定されてしまい、その結果ユーザに対して正しい経路誘導を提供することができないことがあった。
【0010】
なお経路の始点に関しては、車両が走行して道路R2やR3に接近することにより正しい始点が取得され、直ぐさま経路修正が行われる。しかしこれは、経路検索が初期的に少なくとも二回実施されることを意味し、ナビゲーションシステムの制御系に極めて負担となり得る。また経路の終点の誤りに関しては依然として解消されない。
【0011】
このような問題を回避するため、例えばユーザ自身がマニュアル操作により出発道路と目的道路を指定する方法が挙げられる。しかしこのような操作はユーザにとって負担であり望ましい解決方法とは言えない。
【0012】
そこで、本発明は上記の事情に鑑みて、ユーザに負担を掛けることなく出発道路をより正確に決定することができるナビゲーションシステム及び道路決定方法を提供することを課題としている。また、目的道路もより正確に決定することができるナビゲーションシステム及び道路決定方法を提供することも課題としている。また更に、このようなナビゲーションシステム及び道路決定方法を実現するのに好適な地図データ構造を提供することも課題としている。
【課題を解決するための手段】
【0013】
上記の課題を解決する本発明の一態様に係る、所定の地図データを参照して経路検索を行うナビゲーションシステムは、出発地を表す情報を用いて該地図データを検索し、当該出発地周辺の道路の情報を少なくとも一つ取得する第一の道路取得手段と、該地図データ上における距離であって、第一の道路取得手段により取得された道路上の点であり出発地に最も近い最近接点と該出発地との距離を算出する第一の距離算出手段と、該地図データ上において該出発地と該最近接点とを結ぶ直線上に車両が通行できない場所が存在するか否かを判定する第一の道路判定手段と、第一の距離算出手段による算出結果及び第一の道路判定手段による判定結果に基づいて出発道路を決定する出発道路決定手段とを備えたことを特徴としたシステムである。
【0014】
このように構成されたナビゲーションシステムによれば、他の道路を経由せずに直接入ることができる道路が確実に出発道路として決定される。この結果、より正確な出発道路の決定が実現されることとなる。
【0015】
なお上記ナビゲーションシステムにおいて出発道路決定手段は、該出発地と該最近接点との間に車両の通行を妨げる場所が存在しない道路の中で当該出発地から最も近い道路を出発道路に決定するよう動作することができる。
【0016】
上記の如く動作する出発道路決定手段により決定される道路は、実際に出発道路となる可能性が極めて高く、経路検索に好適であると言える。
【0017】
また上記ナビゲーションシステムは、所定のユーザ・オペレーションにより設定された目的地の情報を取得する目的地取得手段と、目的地取得手段により取得された目的地の情報を用いて該地図データを検索し、当該目的地周辺の道路の情報を少なくとも一つ取得する第二の道路取得手段と、該地図データ上における距離であって、第二の道路取得手段により取得された道路と該目的地との距離を算出する第二の距離算出手段と、該地図データ上において該道路から該目的地に他の道路を経由することなく到達可能か否かを判定する第二の道路判定手段と、第二の距離算出手段による算出結果及び第二の道路判定手段による判定結果に基づいて目的道路を決定する目的道路決定手段とを更に備えたシステムであっても良い。
【0018】
このように構成されたナビゲーションシステムによれば、他の道路を経由せずに目的地に到達することができる道路が確実に目的道路として決定される。この結果、より正確な目的道路の決定が実現されることとなる。
【0019】
なお上記ナビゲーションシステムにおいて目的道路決定手段は、該目的地に他の道路を経由することなく到達可能な道路の中で当該目的地に最も近い道路を目的道路に決定するよう動作することができる。
【0020】
上記の如く動作する目的道路決定手段により決定される道路は、実際に目的道路となる可能性が極めて高く、経路検索に好適であると言える。
【0021】
また上記の課題を解決する本発明の一態様に係る、所定の地図データを参照して経路を検索する際の出発道路を決定する道路決定方法は、出発地を表す情報を用いて該地図データを検索し、当該出発地周辺の道路の情報を少なくとも一つ取得する第一の道路取得ステップと、該地図データ上における距離であって、第一の道路取得ステップにより取得された道路上の点であり出発地に最も近い最近接点と該出発地との距離を算出する第一の距離算出ステップと、該地図データ上において該出発地と該最近接点とを結ぶ直線上に車両が通行できない場所が存在するか否かを判定する第一の道路判定ステップと、第一の距離算出ステップによる算出結果及び第一の道路判定ステップによる判定結果に基づいて出発道路を決定する出発道路決定ステップとを含むことを特徴とした方法である。
【0022】
このような道路決定方法によれば、他の道路を経由せずに直接入ることができる道路が確実に出発道路として決定される。この結果、より正確な出発道路の決定が実現されることとなる。
【0023】
なお上記出発道路決定ステップにおいて、該出発地と該最近接点との間に車両の通行を妨げる場所が存在しない道路の中で当該出発地から最も近い道路を出発道路に決定しても良い。
【0024】
上記出発道路決定ステップにおいて決定される道路は、実際に出発道路となる可能性が極めて高く、経路検索に好適であると言える。
【0025】
また上記道路決定方法は、所定のユーザ・オペレーションにより設定された目的地の情報を取得する目的地取得ステップと、目的地取得ステップにより取得された目的地の情報を用いて該地図データを検索し、当該目的地周辺の道路の情報を少なくとも一つ取得する第二の道路取得ステップと、該地図データ上における距離であって、第二の道路取得ステップにより取得された道路と該目的地との距離を算出する第二の距離算出ステップと、該地図データ上において該道路から該目的地に他の道路を経由することなく到達可能か否かを判定する第二の道路判定ステップと、第二の距離算出ステップによる算出結果及び第二の道路判定ステップによる判定結果に基づいて目的道路を決定する目的道路決定ステップとを更に含んだものであっても良い。
【0026】
このような道路決定方法によれば、他の道路を経由せずに目的地に到達することができる道路が確実に目的道路として決定される。この結果、より正確な目的道路の決定が実現されることとなる。
【0027】
なお上記目的道路決定ステップにおいて、該目的地に他の道路を経由することなく到達可能な道路の中で当該目的地に最も近い道路を目的道路に決定しても良い。
【0028】
また上記の課題を解決する本発明の一態様に係る地図データ構造は、コンピュータに、経路検索のための出発道路及び目的道路を決定させるためのものである。この地図データ構造は、所定の座標系に対応付けられ、少なくとも道路及び地形が描かれた地図画像を含み、該道路を該座標系に対応した第一のポリラインで定義し、更に、車両が通行できない場所を該コンピュータに認識させるため、該車両が通行できる場所と通行できない場所との境界を該座標系に対応した第二のポリラインで定義したことを特徴としたものである。
【0029】
このような地図データ構造によれば、車両が通行できない場所をコンピュータに認識させることが可能である。従ってこの地図データ構造を採用することにより、出発道路及び目的道路をコンピュータにより正確に決定させることが可能となる。
【発明の効果】
【0030】
本発明に係るナビゲーションシステム及び道路決定方法によれば、ユーザに負担を掛けることなく出発道路をより正確に決定することが可能となる。また本発明に係る地図データ構造によれば、このようなナビゲーションシステム及び道路決定方法を好適に実現することが可能となる。
【発明を実施するための最良の形態】
【0031】
以下に、図面を参照して、本発明の実施の形態のナビゲーションシステムの構成及び作用について説明する。
【0032】
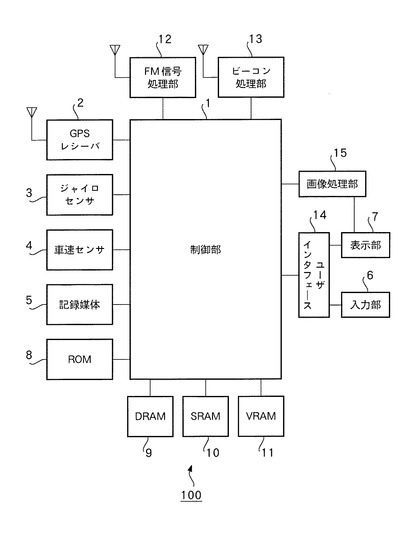
図2は、本発明の実施の形態のナビゲーションシステム100の構成を示したブロック図である。ナビゲーションシステム100は、ユーザを目的地に案内するためのナビゲーション機能を有したものである。
【0033】
ナビゲーションシステム100は、制御部1、GPS(Global Positioning System)レシーバ2、ジャイロセンサ3、車速センサ4、記録媒体5、入力部6、表示部7、ROM(Read Only Memory)8、DRAM(Dynamic Random Access Memory)9、SRAM(Static Random Access Memory)10、VRAM(Video Random Access Memory)11、FM信号処理部12、ビーコン処理部13、ユーザインタフェース14、及び、画像処理部15を具備する。制御部1はシステム全体を統括的に制御するよう動作する。ナビゲーションシステム100の各構成要素は制御部1の制御下で各種処理を実行する。
【0034】
GPSレシーバ2は、地球を周回する複数のGPS衛星の幾つかを捕捉・追尾する。そして捕捉・追尾中に受信される各GPS衛星からのGPS信号を用いて、位置及び速度測位を実行する。GPSレシーバ2は、算出された測位(以下、便宜上「GPS測位」と称する)結果を制御部1に受け渡す。
【0035】
ジャイロセンサ3及び車速センサ4は、周知のデッドレコニング(Dead Reckoning、以下、「DR」と略記)用のセンサである。ジャイロセンサ3は、ナビゲーションシステム100を搭載した車両の方位に関する角速度を計測し、その計測結果を制御部1に出力する。また車速センサ4は、当該車両の左右の駆動輪の回転速度を検出してその平均速度に応じた車速パルス信号を生成して制御部1に出力する。なお便宜上、これらのセンサ出力を「DRセンサ出力」と記す。
【0036】
記録媒体5は、例えばCD(Compact Disc)やDVD(Digital Versatile Disk)が収納され、或いは、HDD(Hard Disk Drive)を内蔵したものである。記録媒体5には、例えばナビゲーションシステム100がナビゲーションを行う際に必要とするナビデータが格納されている。
【0037】
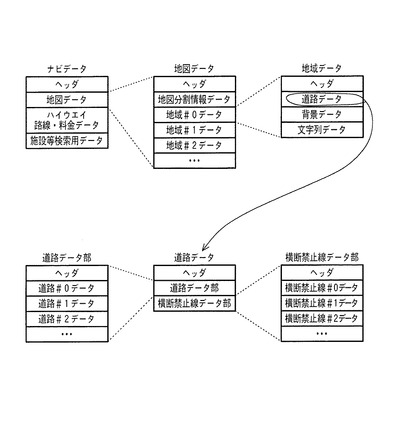
図3に、記録媒体5に格納されているナビデータの概念図を示す。ナビデータは、「地図データ」、「ハイウェイ路線・料金データ」、及び、「施設等検索用データ」を最上位階層としたデータ構造を有している。「地図データ」には、ナビデータが網羅する全地域の地図に関するデータが管理されている。「ハイウェイ路線・料金データ」には、上記地域の全ての有料道路の料金に関するデータが管理されている。また「施設等検索用データ」には、上記地域の飲食店やコンビニ、駅等の目的地となり得るシンボルのデータが管理されている。なお各階層のヘッダにはその階層に関するメタデータが含まれている。
【0038】
ここで、「地図データ」の下位階層について詳説する。「地図データ」の下位階層には、「地図分割情報データ」、複数の「地域データ」(図3における「地域#0データ」、「地域#1データ」、「地域#2データ」等)が管理されている。「地図分割情報データ」には、ナビデータが網羅する地域がデータとしてどのように分割されて格納されているかが示されている。「地域データ」には、分割された各地域に関するデータが管理されている。
【0039】
「地域データ」の下位階層には、「道路データ」、「背景データ」、「文字列データ」が管理されている。「道路データ」には、その地域に含まれる道路に関するデータが管理されている。「背景データ」には、その地域の地形や建造物、道路等の地図画像が管理されている。この地図画像は、例えば所定の座標系に関連付けられて管理されている。「文字列データ」には、地図上の地名や施設名等の名称を表すテキストデータが管理されている。これらのテキストデータも上記所定の座標系に関連付けられて管理されている。
【0040】
「道路データ」の下位階層には、「道路データ部」、「横断禁止線データ部」が管理されている。「道路データ部」の下位階層には、各道路の詳細なデータを持つ複数の道路詳細データ(図3における「道路#0データ」、「道路#1データ」、「道路#2データ」等)が管理されている。各道路詳細データでは、例えば単一のリンクとして取り扱われている区間の道路がポリラインで定義されている。すなわち各道路詳細データは、上記地図画像において、当該道路詳細データに対応する道路上にプロットされる座標の集合から成る。また「横断禁止線データ部」には各横断禁止線についての詳細なデータ(以下、「横断禁止線詳細データ」と記す)が管理されている。「横断禁止線データ部」については後に詳説する。
【0041】
図2の説明に戻る。入力部6はユーザ・オペレーションを成すためのものであり、例えばナビゲーションシステム100のフロントパネル(不図示)に設置されたメカニカル式の入力キーである。或いは、ユーザインタフェース14と赤外線通信を行うことによりユーザ・オペレーションを実現させるリモートコントロール機器(不図示)である。例えば電源スイッチは入力部6を構成する一要素である。
【0042】
表示部7は例えばナビゲーション用画面を表示するためのものである。この表示部7で表示される画像は画像処理部15により生成される。附言するに、表示部7は例えば感圧式又は静電式等の周知のタッチ・パネルであり、入力手段を兼ねている。入力部6又は表示部7が操作されると、それに応じた信号がユーザインタフェース14を介して制御部1に入力する。そして制御部1は、ユーザ・オペレーションに対応した処理が実行されるよう各構成要素を制御する。
【0043】
ROM8には、ナビゲーション機能を実現するためのプログラムや各種データ等が格納されている。またDRAM9やSRAM10は、例えば記録媒体5やROM8に格納されているプログラムやデータの展開先である。制御部1は、例えば記録媒体5やROM8に格納されているプログラムを読み出して、DRAM9やSRAM10の所定領域に展開して実行させる。これにより、例えばナビゲーション機能が実現される。なおSRAM10は電源オフ時にバッテリバックアップされており、そのメモリ内容を保持することができる。またVRAM11は、表示部7に表示される画像を保持するための画像用メモリである。
【0044】
FM信号処理部12は例えばFM多重放送を受信し、その受信信号の中から所望の信号を抽出して処理する装置である。またビーコン処理部13は、例えば幹線道路に設置された光ビーコンや、高速道路に設置された電波ビーコンから発信される信号を受信して処理する装置である。FM信号処理部12やビーコン処理部13で受信される信号は、例えば、道路交通情報通信システムセンターが配信する道路交通情報(VICS(Vehicle Information and Communication System)信号)である。
【0045】
ここで、GPSレシーバ2からのGPS測位結果及び各センサからのDRセンサ出力を受け取った際の制御部1の処理について説明する。
【0046】
制御部1は、各センサが出力したDRセンサ出力に基づいてDR測位演算を行い、車両の進行方向及び移動距離を得る。次いで制御部1は、演算したDR測位結果及びGPS測位結果と、夫々の測位結果に対する誤差推定値とを比較する。そしてこの比較結果に基づいて、高精度と判定される測位結果を選択し、選択された測位結果をマップマッチングする。また制御部1は、各測位結果に基づいて現在位置周辺の地図画像を記録媒体5のナビデータから抽出する。次いで、この抽出された地図画像に車両の現在位置を示す自車位置マークが重畳表示されるよう画像処理部15を動作させる。これにより、表示部7にナビゲーション情報を含む各種情報が出力されて表示される。
【0047】
なおここでいうマップマッチングとは、表示部7に表示されている地図中の道路から外れた位置に自車位置マークが表示されるなどの誤差を補正することを示す。マップマッチングを行うことによって自車位置と地図との整合性が取れ、ユーザは自車の現在位置を正確に把握することができる。マップマッチングは、ナビゲーションの実行に拘わらず常時行われている。
【0048】
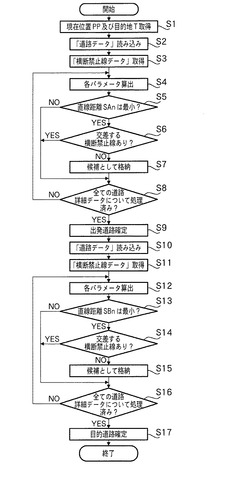
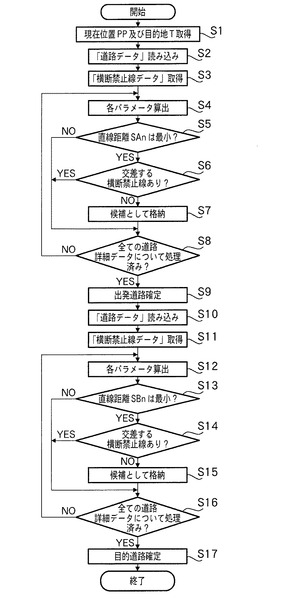
次に、本実施形態のナビゲーションシステム100により実行される処理であって、出発道路及び目的道路を決定する道路決定処理について説明する。図4に、この道路決定処理をフローチャートで示す。
【0049】
図4に示されたフローチャートは、所望の目的地に向けたナビゲーション機能が実現されるようにユーザ・オペレーションが成されたとき開始される。すなわち例えば目的地の名称等が入力されて検索開始の操作が成されると、制御部1は、DR測位結果やGPS測位結果等を用いて車両の現在位置情報を取得すると共に、ナビデータを参照して、入力された目的地の情報も取得する(ステップ1、以下の明細書及び図面においてステップを「S」と略記)。なお説明の便宜上、S1の処理で取得された現在位置に「PP」、目的地に「T」を付す。
【0050】
次いで、制御部1は現在位置PPを参照して、当該現在位置PPを含む「地域データ」の「道路データ」を読み込む(S2)。そしてその「道路データ」に含まれる「横断禁止線データ部」を参照して、当該「横断禁止線データ部」に含まれる全ての横断禁止線詳細データを抽出する(S3)。
【0051】
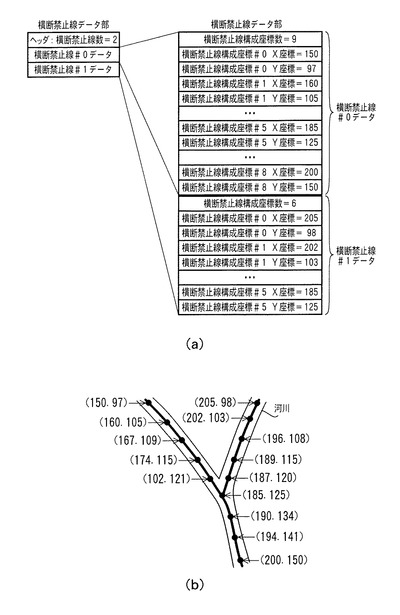
ここで、図5を参照して「横断禁止線データ部」について説明する。図5(a)に、「横断禁止線データ部」の概念図を示す。「横断禁止線データ部」は、複数の横断禁止線詳細データ(図5(a)における「横断禁止線#0データ」、「横断禁止線#1データ」等)を管理している。そのヘッダには、例えば自己の下位階層にある横断禁止線詳細データの数が記述されている。
【0052】
各横断禁止線詳細データは、車両が通行できる場所と通行できない場所との境界(以下、「横断禁止線」と記す)を定義するためのデータである。附言するにこれらの横断禁止線詳細データは、上述した道路詳細データと同様に、例えば上記横断禁止線をポリラインで定義したものである。制御部1は、横断禁止線詳細データで定義された横断禁止線を車両が越えられないことを認識している。この横断禁止線は「背景データ」を基に描画される地図上において、例えば河川の中心線沿いや湖沼の沿岸線沿い、海岸線沿い、立体交差でない鉄道線路沿い等に引かれるものである。また山岳の尾根線上に引かれるものであり得る。また更に、山岳の中の通行不可なエリアを囲うように引かれるものであり得る。
【0053】
例えば図5(b)に横断禁止線を説明するための図を示す。図5(b)の例によれば、「横断禁止線#0データ」及び「横断禁止線#1データ」は、例えば「背景データ」に描かれる河川上に引かれるポリラインである。換言すると河川を定義するポリラインである。制御部1は、この河川が横断禁止線詳細データにより定義された横断禁止線上にあることから、車両が当該河川を越えられないと認識することができる。
【0054】
図4のフローチャートの説明に戻る。制御部1は横断禁止線詳細データを抽出した後、S2の処理で読み込んだ「道路データ」に含まれる道路詳細データ一つ一つについてS4乃至7の処理を実行する。附言するにS4乃至7の処理は所定の順序(例えば「道路#0データ」、「道路#1データ」、「道路#2データ」・・・)で行われる。
【0055】
S4の処理において制御部1は、処理対象の道路詳細データにより定義される道路(以下、「処理対象道路」と記す)上の点であって、現在位置PPに最も近い最近傍点Anを算出する。この最近傍点Anは、現在位置PPを通る処理対象道路の法線と交わる当該道路上の点である。制御部1は、最近傍点Anの算出と同時に、現在位置PPと最近傍点Anとを結ぶ直線LAn(すなわち上記法線)、及び、その直線距離SAn(現在位置PPと最近傍点Anとの距離)を算出する。
【0056】
次いで、制御部1は、この直線距離SAnが今回の道路決定処理で既に算出された他の直線距離SAnよりも短いか否かを判定する(S5)。ここで、他の直線距離SAn以上と判定されるとき(S5:NO)、制御部1は、他の道路の方が現在の処理対象道路よりも出発道路として相応しいと判断し、S8の処理に移行する。これに対して、他の直線距離SAnよりも短いと判定されるとき(S5:YES)、制御部1は、現在の処理対象道路が出発道路となり得ると判断し、S6の処理に移行する。また、S4の処理における直線距離の算出が初回である(すなわち何れの直線距離も算出されていなかった)とき、制御部1はS5の処理で「YES」と判定してS6の処理に移行する。
【0057】
S6の処理において制御部1は、S3の処理で抽出された各横断禁止線詳細データを参照して、直線LAnと、各横断禁止線詳細データにより定義される横断禁止線とが交差するか否かを判定する。ここで、直線LAnと交差する横断禁止線が存在すると判定されるとき(S6:YES)、制御部1は、現在位置PPと現在の処理対象道路との間に横断禁止線が存在することを検知し、車両がこの横断禁止線を越えて処理対象道路に位置し得ないと判断する。そしてこの判断結果にしたがって、現在の処理対象道路が出発道路となり得ないとし、S8の処理に移行する。これに対して、直線LAnが何れの横断禁止線とも交差しないと判定されるとき(S6:NO)、制御部1は、車両が現在の処理対象道路上に位置する、若しくは、車両が現在の処理対象道路に他の道路を経由することなく直接入ることができる位置にあると判断する。そしてこの判断結果にしたがって、現在の処理対象道路を出発道路の候補として例えばSRAM10に格納して(S7)、S8の処理に移行する。なおS7の処理において、他の道路が出発道路の候補としてSRAM10に保持されている場合、制御部1は現在の処理対象道路を上書き保存する。このため、SRAM10に保持されている出発道路の候補は常時一つとなる。
【0058】
S8の処理において制御部1は、S2の処理で読み込んだ「道路データ」に含まれる全ての道路詳細データについてS4乃至7の処理を実行したか否かを判定する。S8の処理においてS4乃至7の処理を実行していない道路詳細データがあると判定されるとき(S8:NO)、制御部1はS4の処理に復帰して、次の処理対象道路に対する処理を実行する。これに対してS8の処理において全ての道路詳細データについてS4乃至7の処理を実行したと判定されるとき(S8:YES)、制御部1は、SRAM10に保持されている出発道路の候補を出発道路として確定する(S9)。なお出発道路の候補がない場合、制御部1は、例えば出発道路を検索する範囲をその候補が見付かるまで段階的に広げていく。すなわち制御部1は、他の「地域データ」(すなわち現在位置PPを含む「地域データ」以外のもの)の「道路データ」も参照して出発道路の候補を検索する。所定の段階まで検索範囲を広げても出発道路の候補がない場合、制御部1は、例えばエラーと判定して本フローチャートの処理を終了する。
【0059】
制御部1は次いで、目的道路を決定するための処理を行う。制御部1は先ず、目的地Tを参照して、当該目的地Tを含む「地域データ」の「道路データ」を読み込む(S10)。そしてその「道路データ」に含まれる「横断禁止線データ部」を参照して、当該「横断禁止線データ部」に含まれる全ての横断禁止線詳細データを抽出する(S11)。
【0060】
制御部1は横断禁止線詳細データを抽出した後、S10の処理で読み込んだ「道路データ」に含まれる道路詳細データ一つ一つについてS12乃至15の処理を実行する。附言するにS12乃至15の処理は所定の順序(例えば「横断禁止線#0データ」、「横断禁止線#1データ」・・・)で行われる。
【0061】
S12の処理において制御部1は、処理対象道路上の点であって、目的地Tに最も近い最近傍点Bnを算出する。この最近傍点Bnは、目的地Tを通る処理対象道路の法線と交わる当該道路上の点である。制御部1は、最近傍点Bnの算出と同時に、目的地Tと最近傍点Bnとを結ぶ直線LBn(すなわち上記法線)、及び、その長さSBn(目的地Tと最近傍点Bnとの距離)を算出する。
【0062】
次いで、制御部1は、この直線距離SBnが今回の道路決定処理で既に算出された他の直線距離SBnよりも短いか否かを判定する(S13)。ここで、他の直線距離SBn以上と判定されるとき(S13:NO)、制御部1は、他の道路の方が現在の処理対象道路よりも目的道路として相応しいと判断し、S16の処理に移行する。これに対して、他の直線距離SBnよりも短いと判定されるとき(S13:YES)、制御部1は、現在の処理対象道路が目的道路となり得ると判断し、S14の処理に移行する。また、S12の処理における直線距離の算出が初回である(すなわち何れの直線距離も算出されていなかった)とき、制御部1はS13の処理で「YES」と判定してS14の処理に移行する。
【0063】
S14の処理において制御部1は、S11の処理で抽出された各横断禁止線詳細データを参照して、直線LBnと、各横断禁止線詳細データにより定義される横断禁止線とが交差するか否かを判定する。ここで、直線LBnと交差する横断禁止線が存在すると判定されるとき(S14:YES)、制御部1は、目的地Tと現在の処理対象道路との間に横断禁止線が存在することを検知し、車両がこの横断禁止線を越えて処理対象道路に直ぐには到達できないと判断する。そしてこの判断結果にしたがって、現在の処理対象道路が目的道路として不適切であるとし、S16の処理に移行する。これに対して、直線LBnが何れの横断禁止線とも交差しないと判定されるとき(S14:NO)、制御部1は、現在の処理対象道路が目的地T近傍にあり、且つ、その間に河川等の阻害要因が存在しないと判断する。そしてこの判断結果にしたがって、現在の処理対象道路を目的道路の候補として例えばSRAM10に格納して(S15)、S16の処理に移行する。なおS15の処理において、他の道路が目的道路の候補としてSRAM10に保持されている場合、制御部1は現在の処理対象道路を上書き保存する。このため、SRAM10に保持されている目的道路の候補は常時一つとなる。
【0064】
S16の処理において制御部1は、S10の処理で読み込んだ「道路データ」に含まれる全ての道路詳細データについてS12乃至15の処理を実行したか否かを判定する。S16の処理においてS12乃至15の処理を実行していない道路詳細データがあると判定されるとき(S16:NO)、制御部1はS12の処理に復帰して、次の処理対象道路に対する処理を実行する。これに対してS16の処理において全ての道路詳細データについてS12乃至15の処理を実行したと判定されるとき(S16:YES)、制御部1は、SRAM10に保持されている目的道路の候補を目的道路として確定する(S17)。これにより出発道路及び目的道路が確定し、本フローチャートの処理が終了する。なお目的道路の候補がない場合、制御部1は、例えば目的道路を検索する範囲をその候補が見付かるまで段階的に広げていく。すなわち制御部1は、他の「地域データ」(すなわち目的地Tを含む「地域データ」以外のもの)の「道路データ」も参照して目的道路の候補を検索する。所定の段階まで検索範囲を広げても目的道路の候補がない場合、制御部1は、例えばエラーと判定して本フローチャートの処理を終了する。
【0065】
図4のフローチャートの処理が終了すると、制御部1は、確定された出発道路上の最近傍点Anを始点、目的道路上の最近傍点Bnを終点とした経路の検索をダイクストラ法を用いて実行する。これにより車両の出発場所が例えば図1に示される状況にあっても、地点S1でなく地点S2を始点とした経路検索が実行される。すなわち現在位置PPとの間に横断禁止線が存在しない道路上で且つ当該現在位置PPに最も近い地点が、経路の始点として設定される。また終点についても同様である。すなわち目的地Tとの間に横断禁止線が存在しない道路上で且つ目的地Tに最も近い地点が経路の終点に設定される。つまり本実施形態によれば、出発道路及び目的道路が到達可能で且つより適切な道路に決定される。附言するに本実施形態のナビゲーションシステム100によれば、車両が出発して最初に入る可能性の最も高い道路が出発道路に設定される。また、車両が目的地に至る際に最後に走行する可能性の最も高い道路が目的道路として設定される。この結果、経路の始点及び終点がより正確なものとなり、これに伴い、検索により得られる経路もより正確なものとなり得る。
【0066】
以上が本発明の実施の形態である。本発明はこれらの実施の形態に限定されるものではなく様々な範囲で変形が可能である。
【図面の簡単な説明】
【0067】
【図1】車両と各道路、河川等の位置関係を示す図である。
【図2】本発明の実施の形態のナビゲーションシステムの構成を示したブロック図である。
【図3】本発明の実施の形態の記録媒体に格納されているナビデータの概念図を示す。
【図4】本発明の実施の形態で実行される道路決定処理を示したフローチャートである。
【図5】本発明の実施の形態の横断禁止線を説明するための図である。
【符号の説明】
【0068】
1 制御部
2 GPSレシーバ
3 ジャイロセンサ
4 車速センサ
5 記録媒体
6 入力部
7 表示部
8 ROM
9 DRAM
10 SRAM
11 VRAM
12 FM信号処理部
13 ビーコン処理部
14 ユーザインタフェース
15 画像処理部
100 ナビゲーションシステム
【技術分野】
【0001】
この発明は、所定の地図データを参照して経路検索を行うナビゲーションシステムに関する。また、所定の地図データを参照して経路を検索する際の出発道路を決定する道路決定方法に関する。更には、コンピュータに、経路検索のための出発道路及び目的道路を決定させるための地図データ構造に関する。
【背景技術】
【0002】
車両の現在位置から目的地までの経路案内を行うナビゲーションシステムが広く知られ実用に供されている。例えば下記特許文献1には、険しい山や深い川等の通行不可能な場所を避けて経路検索を行うことが可能なナビゲーションシステムが開示されている。
【特許文献1】特願2005−265464号公報
【0003】
上記特許文献1を始めとする種々のナビゲーションシステムでは、一般に、ダイクストラ法と呼ばれるロジックに基づいて経路検索が実行される。より詳細には、ダイクストラ法において経路検索は、道路を構成するリンクを通過するために必要な仕事量を示すリンクコストに基づいた計算により行われる。二つの分岐点を結ぶ各リンクには、距離や道路の種類に応じてそれぞれ異なる重み付けが成されている。附言するに、ダイクストラ法においてはリンクコストの総和が最小となる経路(すなわち現在地から目的地を結ぶリンクの連続)が最適な経路として選択される。
【0004】
ダイクストラ法により経路検索を行う場合には先ず、車両が位置する(又はその近傍の)道路(以下、「出発道路」と略記)と、その目的地近傍の道路(以下、「目的道路」と略記)を決定する必要がある。これら出発道路及び目的道路を決定するにあたり、ナビゲーションシステムが持つ地図データ内に存在する道路上に車両又は目的地が位置しない場合、当該地図データに含まれる道路データの中から、車両の現在位置に最も近い道路が出発道路、目的地に最も近い道路が目的道路として設定される。そして出発道路上において車両に最も近い地点が経路の始点、目的道路上において目的地に最も近い地点が経路の終点として設定されて経路検索が実行される。
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、上述のように出発道路や目的道路を決定した場合、以下に示される問題が起こり得る。図1を参照してこの問題について説明する。
【0006】
図1に示される例によれば車両は位置Pに停止している。そしてその脇には河川rが流れている。また道路R1、R2、R3が車両の三方を囲むように敷設されている。このような状況において上記のアルゴリズムにしたがった経路検索が実行された場合、出発道路を決定するために道路R1、R2、R3の各々と位置Pとの距離(より正確には、位置Pを通る各道路の法線と交わる当該各道路上の地点S1、S2、S3と、位置Pとの距離d1、d2、d3)が求められる。図1に示される例ではd1<d2<d3である。このため出発道路が道路R1に決定され、経路の始点が地点S1に設定される。これにより、地点S1から始まる経路の検索が実行されることになる。
【0007】
ところが車両と道路R1との間には河川rが流れている。図1に示されるように、車両が地点S1に到達するためには、例えば河川rに入って向こう岸に直接渡る方法が挙げられる。しかしこの方法は現実的ではない。従って車両が地点S1に到達するためには先ず、他の道路を走行するより他ない。すなわち地点S1から始まる経路は誤ったものであると言える。
【0008】
この問題は目的地においても起こり得る。例えば図1の位置Pを目的地に置き換えて考えると、先と同様にやはり道路R1が目的道路に決定されて、地点S1が経路の終点に設定されることが分かる。実際には地点S2やS3等が終点に設定されるべきであり、地点S1を終点とする経路も誤ったものであると言える。
【0009】
つまり上記アルゴリズムでは、ユーザに対して誤った経路が提示されてしまうことがある。すなわち上記のような従来のナビゲーションシステムでは、経路の始点や終点が誤って設定されてしまい、その結果ユーザに対して正しい経路誘導を提供することができないことがあった。
【0010】
なお経路の始点に関しては、車両が走行して道路R2やR3に接近することにより正しい始点が取得され、直ぐさま経路修正が行われる。しかしこれは、経路検索が初期的に少なくとも二回実施されることを意味し、ナビゲーションシステムの制御系に極めて負担となり得る。また経路の終点の誤りに関しては依然として解消されない。
【0011】
このような問題を回避するため、例えばユーザ自身がマニュアル操作により出発道路と目的道路を指定する方法が挙げられる。しかしこのような操作はユーザにとって負担であり望ましい解決方法とは言えない。
【0012】
そこで、本発明は上記の事情に鑑みて、ユーザに負担を掛けることなく出発道路をより正確に決定することができるナビゲーションシステム及び道路決定方法を提供することを課題としている。また、目的道路もより正確に決定することができるナビゲーションシステム及び道路決定方法を提供することも課題としている。また更に、このようなナビゲーションシステム及び道路決定方法を実現するのに好適な地図データ構造を提供することも課題としている。
【課題を解決するための手段】
【0013】
上記の課題を解決する本発明の一態様に係る、所定の地図データを参照して経路検索を行うナビゲーションシステムは、出発地を表す情報を用いて該地図データを検索し、当該出発地周辺の道路の情報を少なくとも一つ取得する第一の道路取得手段と、該地図データ上における距離であって、第一の道路取得手段により取得された道路上の点であり出発地に最も近い最近接点と該出発地との距離を算出する第一の距離算出手段と、該地図データ上において該出発地と該最近接点とを結ぶ直線上に車両が通行できない場所が存在するか否かを判定する第一の道路判定手段と、第一の距離算出手段による算出結果及び第一の道路判定手段による判定結果に基づいて出発道路を決定する出発道路決定手段とを備えたことを特徴としたシステムである。
【0014】
このように構成されたナビゲーションシステムによれば、他の道路を経由せずに直接入ることができる道路が確実に出発道路として決定される。この結果、より正確な出発道路の決定が実現されることとなる。
【0015】
なお上記ナビゲーションシステムにおいて出発道路決定手段は、該出発地と該最近接点との間に車両の通行を妨げる場所が存在しない道路の中で当該出発地から最も近い道路を出発道路に決定するよう動作することができる。
【0016】
上記の如く動作する出発道路決定手段により決定される道路は、実際に出発道路となる可能性が極めて高く、経路検索に好適であると言える。
【0017】
また上記ナビゲーションシステムは、所定のユーザ・オペレーションにより設定された目的地の情報を取得する目的地取得手段と、目的地取得手段により取得された目的地の情報を用いて該地図データを検索し、当該目的地周辺の道路の情報を少なくとも一つ取得する第二の道路取得手段と、該地図データ上における距離であって、第二の道路取得手段により取得された道路と該目的地との距離を算出する第二の距離算出手段と、該地図データ上において該道路から該目的地に他の道路を経由することなく到達可能か否かを判定する第二の道路判定手段と、第二の距離算出手段による算出結果及び第二の道路判定手段による判定結果に基づいて目的道路を決定する目的道路決定手段とを更に備えたシステムであっても良い。
【0018】
このように構成されたナビゲーションシステムによれば、他の道路を経由せずに目的地に到達することができる道路が確実に目的道路として決定される。この結果、より正確な目的道路の決定が実現されることとなる。
【0019】
なお上記ナビゲーションシステムにおいて目的道路決定手段は、該目的地に他の道路を経由することなく到達可能な道路の中で当該目的地に最も近い道路を目的道路に決定するよう動作することができる。
【0020】
上記の如く動作する目的道路決定手段により決定される道路は、実際に目的道路となる可能性が極めて高く、経路検索に好適であると言える。
【0021】
また上記の課題を解決する本発明の一態様に係る、所定の地図データを参照して経路を検索する際の出発道路を決定する道路決定方法は、出発地を表す情報を用いて該地図データを検索し、当該出発地周辺の道路の情報を少なくとも一つ取得する第一の道路取得ステップと、該地図データ上における距離であって、第一の道路取得ステップにより取得された道路上の点であり出発地に最も近い最近接点と該出発地との距離を算出する第一の距離算出ステップと、該地図データ上において該出発地と該最近接点とを結ぶ直線上に車両が通行できない場所が存在するか否かを判定する第一の道路判定ステップと、第一の距離算出ステップによる算出結果及び第一の道路判定ステップによる判定結果に基づいて出発道路を決定する出発道路決定ステップとを含むことを特徴とした方法である。
【0022】
このような道路決定方法によれば、他の道路を経由せずに直接入ることができる道路が確実に出発道路として決定される。この結果、より正確な出発道路の決定が実現されることとなる。
【0023】
なお上記出発道路決定ステップにおいて、該出発地と該最近接点との間に車両の通行を妨げる場所が存在しない道路の中で当該出発地から最も近い道路を出発道路に決定しても良い。
【0024】
上記出発道路決定ステップにおいて決定される道路は、実際に出発道路となる可能性が極めて高く、経路検索に好適であると言える。
【0025】
また上記道路決定方法は、所定のユーザ・オペレーションにより設定された目的地の情報を取得する目的地取得ステップと、目的地取得ステップにより取得された目的地の情報を用いて該地図データを検索し、当該目的地周辺の道路の情報を少なくとも一つ取得する第二の道路取得ステップと、該地図データ上における距離であって、第二の道路取得ステップにより取得された道路と該目的地との距離を算出する第二の距離算出ステップと、該地図データ上において該道路から該目的地に他の道路を経由することなく到達可能か否かを判定する第二の道路判定ステップと、第二の距離算出ステップによる算出結果及び第二の道路判定ステップによる判定結果に基づいて目的道路を決定する目的道路決定ステップとを更に含んだものであっても良い。
【0026】
このような道路決定方法によれば、他の道路を経由せずに目的地に到達することができる道路が確実に目的道路として決定される。この結果、より正確な目的道路の決定が実現されることとなる。
【0027】
なお上記目的道路決定ステップにおいて、該目的地に他の道路を経由することなく到達可能な道路の中で当該目的地に最も近い道路を目的道路に決定しても良い。
【0028】
また上記の課題を解決する本発明の一態様に係る地図データ構造は、コンピュータに、経路検索のための出発道路及び目的道路を決定させるためのものである。この地図データ構造は、所定の座標系に対応付けられ、少なくとも道路及び地形が描かれた地図画像を含み、該道路を該座標系に対応した第一のポリラインで定義し、更に、車両が通行できない場所を該コンピュータに認識させるため、該車両が通行できる場所と通行できない場所との境界を該座標系に対応した第二のポリラインで定義したことを特徴としたものである。
【0029】
このような地図データ構造によれば、車両が通行できない場所をコンピュータに認識させることが可能である。従ってこの地図データ構造を採用することにより、出発道路及び目的道路をコンピュータにより正確に決定させることが可能となる。
【発明の効果】
【0030】
本発明に係るナビゲーションシステム及び道路決定方法によれば、ユーザに負担を掛けることなく出発道路をより正確に決定することが可能となる。また本発明に係る地図データ構造によれば、このようなナビゲーションシステム及び道路決定方法を好適に実現することが可能となる。
【発明を実施するための最良の形態】
【0031】
以下に、図面を参照して、本発明の実施の形態のナビゲーションシステムの構成及び作用について説明する。
【0032】
図2は、本発明の実施の形態のナビゲーションシステム100の構成を示したブロック図である。ナビゲーションシステム100は、ユーザを目的地に案内するためのナビゲーション機能を有したものである。
【0033】
ナビゲーションシステム100は、制御部1、GPS(Global Positioning System)レシーバ2、ジャイロセンサ3、車速センサ4、記録媒体5、入力部6、表示部7、ROM(Read Only Memory)8、DRAM(Dynamic Random Access Memory)9、SRAM(Static Random Access Memory)10、VRAM(Video Random Access Memory)11、FM信号処理部12、ビーコン処理部13、ユーザインタフェース14、及び、画像処理部15を具備する。制御部1はシステム全体を統括的に制御するよう動作する。ナビゲーションシステム100の各構成要素は制御部1の制御下で各種処理を実行する。
【0034】
GPSレシーバ2は、地球を周回する複数のGPS衛星の幾つかを捕捉・追尾する。そして捕捉・追尾中に受信される各GPS衛星からのGPS信号を用いて、位置及び速度測位を実行する。GPSレシーバ2は、算出された測位(以下、便宜上「GPS測位」と称する)結果を制御部1に受け渡す。
【0035】
ジャイロセンサ3及び車速センサ4は、周知のデッドレコニング(Dead Reckoning、以下、「DR」と略記)用のセンサである。ジャイロセンサ3は、ナビゲーションシステム100を搭載した車両の方位に関する角速度を計測し、その計測結果を制御部1に出力する。また車速センサ4は、当該車両の左右の駆動輪の回転速度を検出してその平均速度に応じた車速パルス信号を生成して制御部1に出力する。なお便宜上、これらのセンサ出力を「DRセンサ出力」と記す。
【0036】
記録媒体5は、例えばCD(Compact Disc)やDVD(Digital Versatile Disk)が収納され、或いは、HDD(Hard Disk Drive)を内蔵したものである。記録媒体5には、例えばナビゲーションシステム100がナビゲーションを行う際に必要とするナビデータが格納されている。
【0037】
図3に、記録媒体5に格納されているナビデータの概念図を示す。ナビデータは、「地図データ」、「ハイウェイ路線・料金データ」、及び、「施設等検索用データ」を最上位階層としたデータ構造を有している。「地図データ」には、ナビデータが網羅する全地域の地図に関するデータが管理されている。「ハイウェイ路線・料金データ」には、上記地域の全ての有料道路の料金に関するデータが管理されている。また「施設等検索用データ」には、上記地域の飲食店やコンビニ、駅等の目的地となり得るシンボルのデータが管理されている。なお各階層のヘッダにはその階層に関するメタデータが含まれている。
【0038】
ここで、「地図データ」の下位階層について詳説する。「地図データ」の下位階層には、「地図分割情報データ」、複数の「地域データ」(図3における「地域#0データ」、「地域#1データ」、「地域#2データ」等)が管理されている。「地図分割情報データ」には、ナビデータが網羅する地域がデータとしてどのように分割されて格納されているかが示されている。「地域データ」には、分割された各地域に関するデータが管理されている。
【0039】
「地域データ」の下位階層には、「道路データ」、「背景データ」、「文字列データ」が管理されている。「道路データ」には、その地域に含まれる道路に関するデータが管理されている。「背景データ」には、その地域の地形や建造物、道路等の地図画像が管理されている。この地図画像は、例えば所定の座標系に関連付けられて管理されている。「文字列データ」には、地図上の地名や施設名等の名称を表すテキストデータが管理されている。これらのテキストデータも上記所定の座標系に関連付けられて管理されている。
【0040】
「道路データ」の下位階層には、「道路データ部」、「横断禁止線データ部」が管理されている。「道路データ部」の下位階層には、各道路の詳細なデータを持つ複数の道路詳細データ(図3における「道路#0データ」、「道路#1データ」、「道路#2データ」等)が管理されている。各道路詳細データでは、例えば単一のリンクとして取り扱われている区間の道路がポリラインで定義されている。すなわち各道路詳細データは、上記地図画像において、当該道路詳細データに対応する道路上にプロットされる座標の集合から成る。また「横断禁止線データ部」には各横断禁止線についての詳細なデータ(以下、「横断禁止線詳細データ」と記す)が管理されている。「横断禁止線データ部」については後に詳説する。
【0041】
図2の説明に戻る。入力部6はユーザ・オペレーションを成すためのものであり、例えばナビゲーションシステム100のフロントパネル(不図示)に設置されたメカニカル式の入力キーである。或いは、ユーザインタフェース14と赤外線通信を行うことによりユーザ・オペレーションを実現させるリモートコントロール機器(不図示)である。例えば電源スイッチは入力部6を構成する一要素である。
【0042】
表示部7は例えばナビゲーション用画面を表示するためのものである。この表示部7で表示される画像は画像処理部15により生成される。附言するに、表示部7は例えば感圧式又は静電式等の周知のタッチ・パネルであり、入力手段を兼ねている。入力部6又は表示部7が操作されると、それに応じた信号がユーザインタフェース14を介して制御部1に入力する。そして制御部1は、ユーザ・オペレーションに対応した処理が実行されるよう各構成要素を制御する。
【0043】
ROM8には、ナビゲーション機能を実現するためのプログラムや各種データ等が格納されている。またDRAM9やSRAM10は、例えば記録媒体5やROM8に格納されているプログラムやデータの展開先である。制御部1は、例えば記録媒体5やROM8に格納されているプログラムを読み出して、DRAM9やSRAM10の所定領域に展開して実行させる。これにより、例えばナビゲーション機能が実現される。なおSRAM10は電源オフ時にバッテリバックアップされており、そのメモリ内容を保持することができる。またVRAM11は、表示部7に表示される画像を保持するための画像用メモリである。
【0044】
FM信号処理部12は例えばFM多重放送を受信し、その受信信号の中から所望の信号を抽出して処理する装置である。またビーコン処理部13は、例えば幹線道路に設置された光ビーコンや、高速道路に設置された電波ビーコンから発信される信号を受信して処理する装置である。FM信号処理部12やビーコン処理部13で受信される信号は、例えば、道路交通情報通信システムセンターが配信する道路交通情報(VICS(Vehicle Information and Communication System)信号)である。
【0045】
ここで、GPSレシーバ2からのGPS測位結果及び各センサからのDRセンサ出力を受け取った際の制御部1の処理について説明する。
【0046】
制御部1は、各センサが出力したDRセンサ出力に基づいてDR測位演算を行い、車両の進行方向及び移動距離を得る。次いで制御部1は、演算したDR測位結果及びGPS測位結果と、夫々の測位結果に対する誤差推定値とを比較する。そしてこの比較結果に基づいて、高精度と判定される測位結果を選択し、選択された測位結果をマップマッチングする。また制御部1は、各測位結果に基づいて現在位置周辺の地図画像を記録媒体5のナビデータから抽出する。次いで、この抽出された地図画像に車両の現在位置を示す自車位置マークが重畳表示されるよう画像処理部15を動作させる。これにより、表示部7にナビゲーション情報を含む各種情報が出力されて表示される。
【0047】
なおここでいうマップマッチングとは、表示部7に表示されている地図中の道路から外れた位置に自車位置マークが表示されるなどの誤差を補正することを示す。マップマッチングを行うことによって自車位置と地図との整合性が取れ、ユーザは自車の現在位置を正確に把握することができる。マップマッチングは、ナビゲーションの実行に拘わらず常時行われている。
【0048】
次に、本実施形態のナビゲーションシステム100により実行される処理であって、出発道路及び目的道路を決定する道路決定処理について説明する。図4に、この道路決定処理をフローチャートで示す。
【0049】
図4に示されたフローチャートは、所望の目的地に向けたナビゲーション機能が実現されるようにユーザ・オペレーションが成されたとき開始される。すなわち例えば目的地の名称等が入力されて検索開始の操作が成されると、制御部1は、DR測位結果やGPS測位結果等を用いて車両の現在位置情報を取得すると共に、ナビデータを参照して、入力された目的地の情報も取得する(ステップ1、以下の明細書及び図面においてステップを「S」と略記)。なお説明の便宜上、S1の処理で取得された現在位置に「PP」、目的地に「T」を付す。
【0050】
次いで、制御部1は現在位置PPを参照して、当該現在位置PPを含む「地域データ」の「道路データ」を読み込む(S2)。そしてその「道路データ」に含まれる「横断禁止線データ部」を参照して、当該「横断禁止線データ部」に含まれる全ての横断禁止線詳細データを抽出する(S3)。
【0051】
ここで、図5を参照して「横断禁止線データ部」について説明する。図5(a)に、「横断禁止線データ部」の概念図を示す。「横断禁止線データ部」は、複数の横断禁止線詳細データ(図5(a)における「横断禁止線#0データ」、「横断禁止線#1データ」等)を管理している。そのヘッダには、例えば自己の下位階層にある横断禁止線詳細データの数が記述されている。
【0052】
各横断禁止線詳細データは、車両が通行できる場所と通行できない場所との境界(以下、「横断禁止線」と記す)を定義するためのデータである。附言するにこれらの横断禁止線詳細データは、上述した道路詳細データと同様に、例えば上記横断禁止線をポリラインで定義したものである。制御部1は、横断禁止線詳細データで定義された横断禁止線を車両が越えられないことを認識している。この横断禁止線は「背景データ」を基に描画される地図上において、例えば河川の中心線沿いや湖沼の沿岸線沿い、海岸線沿い、立体交差でない鉄道線路沿い等に引かれるものである。また山岳の尾根線上に引かれるものであり得る。また更に、山岳の中の通行不可なエリアを囲うように引かれるものであり得る。
【0053】
例えば図5(b)に横断禁止線を説明するための図を示す。図5(b)の例によれば、「横断禁止線#0データ」及び「横断禁止線#1データ」は、例えば「背景データ」に描かれる河川上に引かれるポリラインである。換言すると河川を定義するポリラインである。制御部1は、この河川が横断禁止線詳細データにより定義された横断禁止線上にあることから、車両が当該河川を越えられないと認識することができる。
【0054】
図4のフローチャートの説明に戻る。制御部1は横断禁止線詳細データを抽出した後、S2の処理で読み込んだ「道路データ」に含まれる道路詳細データ一つ一つについてS4乃至7の処理を実行する。附言するにS4乃至7の処理は所定の順序(例えば「道路#0データ」、「道路#1データ」、「道路#2データ」・・・)で行われる。
【0055】
S4の処理において制御部1は、処理対象の道路詳細データにより定義される道路(以下、「処理対象道路」と記す)上の点であって、現在位置PPに最も近い最近傍点Anを算出する。この最近傍点Anは、現在位置PPを通る処理対象道路の法線と交わる当該道路上の点である。制御部1は、最近傍点Anの算出と同時に、現在位置PPと最近傍点Anとを結ぶ直線LAn(すなわち上記法線)、及び、その直線距離SAn(現在位置PPと最近傍点Anとの距離)を算出する。
【0056】
次いで、制御部1は、この直線距離SAnが今回の道路決定処理で既に算出された他の直線距離SAnよりも短いか否かを判定する(S5)。ここで、他の直線距離SAn以上と判定されるとき(S5:NO)、制御部1は、他の道路の方が現在の処理対象道路よりも出発道路として相応しいと判断し、S8の処理に移行する。これに対して、他の直線距離SAnよりも短いと判定されるとき(S5:YES)、制御部1は、現在の処理対象道路が出発道路となり得ると判断し、S6の処理に移行する。また、S4の処理における直線距離の算出が初回である(すなわち何れの直線距離も算出されていなかった)とき、制御部1はS5の処理で「YES」と判定してS6の処理に移行する。
【0057】
S6の処理において制御部1は、S3の処理で抽出された各横断禁止線詳細データを参照して、直線LAnと、各横断禁止線詳細データにより定義される横断禁止線とが交差するか否かを判定する。ここで、直線LAnと交差する横断禁止線が存在すると判定されるとき(S6:YES)、制御部1は、現在位置PPと現在の処理対象道路との間に横断禁止線が存在することを検知し、車両がこの横断禁止線を越えて処理対象道路に位置し得ないと判断する。そしてこの判断結果にしたがって、現在の処理対象道路が出発道路となり得ないとし、S8の処理に移行する。これに対して、直線LAnが何れの横断禁止線とも交差しないと判定されるとき(S6:NO)、制御部1は、車両が現在の処理対象道路上に位置する、若しくは、車両が現在の処理対象道路に他の道路を経由することなく直接入ることができる位置にあると判断する。そしてこの判断結果にしたがって、現在の処理対象道路を出発道路の候補として例えばSRAM10に格納して(S7)、S8の処理に移行する。なおS7の処理において、他の道路が出発道路の候補としてSRAM10に保持されている場合、制御部1は現在の処理対象道路を上書き保存する。このため、SRAM10に保持されている出発道路の候補は常時一つとなる。
【0058】
S8の処理において制御部1は、S2の処理で読み込んだ「道路データ」に含まれる全ての道路詳細データについてS4乃至7の処理を実行したか否かを判定する。S8の処理においてS4乃至7の処理を実行していない道路詳細データがあると判定されるとき(S8:NO)、制御部1はS4の処理に復帰して、次の処理対象道路に対する処理を実行する。これに対してS8の処理において全ての道路詳細データについてS4乃至7の処理を実行したと判定されるとき(S8:YES)、制御部1は、SRAM10に保持されている出発道路の候補を出発道路として確定する(S9)。なお出発道路の候補がない場合、制御部1は、例えば出発道路を検索する範囲をその候補が見付かるまで段階的に広げていく。すなわち制御部1は、他の「地域データ」(すなわち現在位置PPを含む「地域データ」以外のもの)の「道路データ」も参照して出発道路の候補を検索する。所定の段階まで検索範囲を広げても出発道路の候補がない場合、制御部1は、例えばエラーと判定して本フローチャートの処理を終了する。
【0059】
制御部1は次いで、目的道路を決定するための処理を行う。制御部1は先ず、目的地Tを参照して、当該目的地Tを含む「地域データ」の「道路データ」を読み込む(S10)。そしてその「道路データ」に含まれる「横断禁止線データ部」を参照して、当該「横断禁止線データ部」に含まれる全ての横断禁止線詳細データを抽出する(S11)。
【0060】
制御部1は横断禁止線詳細データを抽出した後、S10の処理で読み込んだ「道路データ」に含まれる道路詳細データ一つ一つについてS12乃至15の処理を実行する。附言するにS12乃至15の処理は所定の順序(例えば「横断禁止線#0データ」、「横断禁止線#1データ」・・・)で行われる。
【0061】
S12の処理において制御部1は、処理対象道路上の点であって、目的地Tに最も近い最近傍点Bnを算出する。この最近傍点Bnは、目的地Tを通る処理対象道路の法線と交わる当該道路上の点である。制御部1は、最近傍点Bnの算出と同時に、目的地Tと最近傍点Bnとを結ぶ直線LBn(すなわち上記法線)、及び、その長さSBn(目的地Tと最近傍点Bnとの距離)を算出する。
【0062】
次いで、制御部1は、この直線距離SBnが今回の道路決定処理で既に算出された他の直線距離SBnよりも短いか否かを判定する(S13)。ここで、他の直線距離SBn以上と判定されるとき(S13:NO)、制御部1は、他の道路の方が現在の処理対象道路よりも目的道路として相応しいと判断し、S16の処理に移行する。これに対して、他の直線距離SBnよりも短いと判定されるとき(S13:YES)、制御部1は、現在の処理対象道路が目的道路となり得ると判断し、S14の処理に移行する。また、S12の処理における直線距離の算出が初回である(すなわち何れの直線距離も算出されていなかった)とき、制御部1はS13の処理で「YES」と判定してS14の処理に移行する。
【0063】
S14の処理において制御部1は、S11の処理で抽出された各横断禁止線詳細データを参照して、直線LBnと、各横断禁止線詳細データにより定義される横断禁止線とが交差するか否かを判定する。ここで、直線LBnと交差する横断禁止線が存在すると判定されるとき(S14:YES)、制御部1は、目的地Tと現在の処理対象道路との間に横断禁止線が存在することを検知し、車両がこの横断禁止線を越えて処理対象道路に直ぐには到達できないと判断する。そしてこの判断結果にしたがって、現在の処理対象道路が目的道路として不適切であるとし、S16の処理に移行する。これに対して、直線LBnが何れの横断禁止線とも交差しないと判定されるとき(S14:NO)、制御部1は、現在の処理対象道路が目的地T近傍にあり、且つ、その間に河川等の阻害要因が存在しないと判断する。そしてこの判断結果にしたがって、現在の処理対象道路を目的道路の候補として例えばSRAM10に格納して(S15)、S16の処理に移行する。なおS15の処理において、他の道路が目的道路の候補としてSRAM10に保持されている場合、制御部1は現在の処理対象道路を上書き保存する。このため、SRAM10に保持されている目的道路の候補は常時一つとなる。
【0064】
S16の処理において制御部1は、S10の処理で読み込んだ「道路データ」に含まれる全ての道路詳細データについてS12乃至15の処理を実行したか否かを判定する。S16の処理においてS12乃至15の処理を実行していない道路詳細データがあると判定されるとき(S16:NO)、制御部1はS12の処理に復帰して、次の処理対象道路に対する処理を実行する。これに対してS16の処理において全ての道路詳細データについてS12乃至15の処理を実行したと判定されるとき(S16:YES)、制御部1は、SRAM10に保持されている目的道路の候補を目的道路として確定する(S17)。これにより出発道路及び目的道路が確定し、本フローチャートの処理が終了する。なお目的道路の候補がない場合、制御部1は、例えば目的道路を検索する範囲をその候補が見付かるまで段階的に広げていく。すなわち制御部1は、他の「地域データ」(すなわち目的地Tを含む「地域データ」以外のもの)の「道路データ」も参照して目的道路の候補を検索する。所定の段階まで検索範囲を広げても目的道路の候補がない場合、制御部1は、例えばエラーと判定して本フローチャートの処理を終了する。
【0065】
図4のフローチャートの処理が終了すると、制御部1は、確定された出発道路上の最近傍点Anを始点、目的道路上の最近傍点Bnを終点とした経路の検索をダイクストラ法を用いて実行する。これにより車両の出発場所が例えば図1に示される状況にあっても、地点S1でなく地点S2を始点とした経路検索が実行される。すなわち現在位置PPとの間に横断禁止線が存在しない道路上で且つ当該現在位置PPに最も近い地点が、経路の始点として設定される。また終点についても同様である。すなわち目的地Tとの間に横断禁止線が存在しない道路上で且つ目的地Tに最も近い地点が経路の終点に設定される。つまり本実施形態によれば、出発道路及び目的道路が到達可能で且つより適切な道路に決定される。附言するに本実施形態のナビゲーションシステム100によれば、車両が出発して最初に入る可能性の最も高い道路が出発道路に設定される。また、車両が目的地に至る際に最後に走行する可能性の最も高い道路が目的道路として設定される。この結果、経路の始点及び終点がより正確なものとなり、これに伴い、検索により得られる経路もより正確なものとなり得る。
【0066】
以上が本発明の実施の形態である。本発明はこれらの実施の形態に限定されるものではなく様々な範囲で変形が可能である。
【図面の簡単な説明】
【0067】
【図1】車両と各道路、河川等の位置関係を示す図である。
【図2】本発明の実施の形態のナビゲーションシステムの構成を示したブロック図である。
【図3】本発明の実施の形態の記録媒体に格納されているナビデータの概念図を示す。
【図4】本発明の実施の形態で実行される道路決定処理を示したフローチャートである。
【図5】本発明の実施の形態の横断禁止線を説明するための図である。
【符号の説明】
【0068】
1 制御部
2 GPSレシーバ
3 ジャイロセンサ
4 車速センサ
5 記録媒体
6 入力部
7 表示部
8 ROM
9 DRAM
10 SRAM
11 VRAM
12 FM信号処理部
13 ビーコン処理部
14 ユーザインタフェース
15 画像処理部
100 ナビゲーションシステム
【特許請求の範囲】
【請求項1】
所定の地図データを参照して経路検索を行うナビゲーションシステムにおいて、
出発地を表す情報を用いて該地図データを検索し、当該出発地周辺の道路の情報を少なくとも一つ取得する第一の道路取得手段と、
該地図データ上における距離であって、前記第一の道路取得手段により取得された道路上の点であり出発地に最も近い最近接点と該出発地との距離を算出する第一の距離算出手段と、
該地図データ上において該出発地と該最近接点とを結ぶ直線上に車両が通行できない場所が存在するか否かを判定する第一の道路判定手段と、
前記第一の距離算出手段による算出結果及び前記第一の道路判定手段による判定結果に基づいて出発道路を決定する出発道路決定手段と、を備えたこと、を特徴とするナビゲーションシステム。
【請求項2】
前記出発道路決定手段は、該出発地と該最近接点との間に車両の通行を妨げる場所が存在しない道路の中で当該出発地から最も近い道路を出発道路に決定すること、を特徴とする請求項1に記載のナビゲーションシステム。
【請求項3】
所定のユーザ・オペレーションにより設定された目的地の情報を取得する目的地取得手段と、
前記目的地取得手段により取得された目的地の情報を用いて該地図データを検索し、当該目的地周辺の道路の情報を少なくとも一つ取得する第二の道路取得手段と、
該地図データ上における距離であって、前記第二の道路取得手段により取得された道路と該目的地との距離を算出する第二の距離算出手段と、
該地図データ上において該道路から該目的地に他の道路を経由することなく到達可能か否かを判定する第二の道路判定手段と、
前記第二の距離算出手段による算出結果及び前記第二の道路判定手段による判定結果に基づいて目的道路を決定する目的道路決定手段と、を更に備えたこと、を特徴とする請求項1又は請求項2の何れかに記載のナビゲーションシステム。
【請求項4】
前記目的道路決定手段は、該目的地に他の道路を経由することなく到達可能な道路の中で当該目的地に最も近い道路を目的道路に決定すること、を特徴とする請求項3に記載のナビゲーションシステム。
【請求項5】
所定の地図データを参照して経路を検索する際の出発道路を決定する道路決定方法において、
出発地を表す情報を用いて該地図データを検索し、当該出発地周辺の道路の情報を少なくとも一つ取得する第一の道路取得ステップと、
該地図データ上における距離であって、前記第一の道路取得ステップにより取得された道路上の点であり出発地に最も近い最近接点と該出発地との距離を算出する第一の距離算出ステップと、
該地図データ上において該出発地と該最近接点とを結ぶ直線上に車両が通行できない場所が存在するか否かを判定する第一の道路判定ステップと、
前記第一の距離算出ステップによる算出結果及び前記第一の道路判定ステップによる判定結果に基づいて出発道路を決定する出発道路決定ステップと、を含むこと、を特徴とする道路決定方法。
【請求項6】
前記出発道路決定ステップにおいて、該出発地と該最近接点との間に車両の通行を妨げる場所が存在しない道路の中で当該出発地から最も近い道路を出発道路に決定すること、を特徴とする請求項5に記載の道路決定方法。
【請求項7】
所定のユーザ・オペレーションにより設定された目的地の情報を取得する目的地取得ステップと、
前記目的地取得ステップにより取得された目的地の情報を用いて該地図データを検索し、当該目的地周辺の道路の情報を少なくとも一つ取得する第二の道路取得ステップと、
該地図データ上における距離であって、前記第二の道路取得ステップにより取得された道路と該目的地との距離を算出する第二の距離算出ステップと、
該地図データ上において該道路から該目的地に他の道路を経由することなく到達可能か否かを判定する第二の道路判定ステップと、
前記第二の距離算出ステップによる算出結果及び前記第二の道路判定ステップによる判定結果に基づいて目的道路を決定する目的道路決定ステップと、を更に含むこと、を特徴とする請求項5又は請求項6の何れかに記載の道路決定方法。
【請求項8】
前記目的道路決定ステップにおいて、該目的地に他の道路を経由することなく到達可能な道路の中で当該目的地に最も近い道路を目的道路に決定すること、を特徴とする請求項7に記載の道路決定方法。
【請求項9】
コンピュータに、経路検索のための出発道路及び目的道路を決定させるための地図データ構造であって、
所定の座標系に対応付けられ、少なくとも道路及び地形が描かれた地図画像を含み、
該道路を該座標系に対応した第一のポリラインで定義し、
更に、車両が通行できない場所を該コンピュータに認識させるため、該車両が通行できる場所と通行できない場所との境界を該座標系に対応した第二のポリラインで定義したこと、を特徴とする地図データ構造。
【請求項1】
所定の地図データを参照して経路検索を行うナビゲーションシステムにおいて、
出発地を表す情報を用いて該地図データを検索し、当該出発地周辺の道路の情報を少なくとも一つ取得する第一の道路取得手段と、
該地図データ上における距離であって、前記第一の道路取得手段により取得された道路上の点であり出発地に最も近い最近接点と該出発地との距離を算出する第一の距離算出手段と、
該地図データ上において該出発地と該最近接点とを結ぶ直線上に車両が通行できない場所が存在するか否かを判定する第一の道路判定手段と、
前記第一の距離算出手段による算出結果及び前記第一の道路判定手段による判定結果に基づいて出発道路を決定する出発道路決定手段と、を備えたこと、を特徴とするナビゲーションシステム。
【請求項2】
前記出発道路決定手段は、該出発地と該最近接点との間に車両の通行を妨げる場所が存在しない道路の中で当該出発地から最も近い道路を出発道路に決定すること、を特徴とする請求項1に記載のナビゲーションシステム。
【請求項3】
所定のユーザ・オペレーションにより設定された目的地の情報を取得する目的地取得手段と、
前記目的地取得手段により取得された目的地の情報を用いて該地図データを検索し、当該目的地周辺の道路の情報を少なくとも一つ取得する第二の道路取得手段と、
該地図データ上における距離であって、前記第二の道路取得手段により取得された道路と該目的地との距離を算出する第二の距離算出手段と、
該地図データ上において該道路から該目的地に他の道路を経由することなく到達可能か否かを判定する第二の道路判定手段と、
前記第二の距離算出手段による算出結果及び前記第二の道路判定手段による判定結果に基づいて目的道路を決定する目的道路決定手段と、を更に備えたこと、を特徴とする請求項1又は請求項2の何れかに記載のナビゲーションシステム。
【請求項4】
前記目的道路決定手段は、該目的地に他の道路を経由することなく到達可能な道路の中で当該目的地に最も近い道路を目的道路に決定すること、を特徴とする請求項3に記載のナビゲーションシステム。
【請求項5】
所定の地図データを参照して経路を検索する際の出発道路を決定する道路決定方法において、
出発地を表す情報を用いて該地図データを検索し、当該出発地周辺の道路の情報を少なくとも一つ取得する第一の道路取得ステップと、
該地図データ上における距離であって、前記第一の道路取得ステップにより取得された道路上の点であり出発地に最も近い最近接点と該出発地との距離を算出する第一の距離算出ステップと、
該地図データ上において該出発地と該最近接点とを結ぶ直線上に車両が通行できない場所が存在するか否かを判定する第一の道路判定ステップと、
前記第一の距離算出ステップによる算出結果及び前記第一の道路判定ステップによる判定結果に基づいて出発道路を決定する出発道路決定ステップと、を含むこと、を特徴とする道路決定方法。
【請求項6】
前記出発道路決定ステップにおいて、該出発地と該最近接点との間に車両の通行を妨げる場所が存在しない道路の中で当該出発地から最も近い道路を出発道路に決定すること、を特徴とする請求項5に記載の道路決定方法。
【請求項7】
所定のユーザ・オペレーションにより設定された目的地の情報を取得する目的地取得ステップと、
前記目的地取得ステップにより取得された目的地の情報を用いて該地図データを検索し、当該目的地周辺の道路の情報を少なくとも一つ取得する第二の道路取得ステップと、
該地図データ上における距離であって、前記第二の道路取得ステップにより取得された道路と該目的地との距離を算出する第二の距離算出ステップと、
該地図データ上において該道路から該目的地に他の道路を経由することなく到達可能か否かを判定する第二の道路判定ステップと、
前記第二の距離算出ステップによる算出結果及び前記第二の道路判定ステップによる判定結果に基づいて目的道路を決定する目的道路決定ステップと、を更に含むこと、を特徴とする請求項5又は請求項6の何れかに記載の道路決定方法。
【請求項8】
前記目的道路決定ステップにおいて、該目的地に他の道路を経由することなく到達可能な道路の中で当該目的地に最も近い道路を目的道路に決定すること、を特徴とする請求項7に記載の道路決定方法。
【請求項9】
コンピュータに、経路検索のための出発道路及び目的道路を決定させるための地図データ構造であって、
所定の座標系に対応付けられ、少なくとも道路及び地形が描かれた地図画像を含み、
該道路を該座標系に対応した第一のポリラインで定義し、
更に、車両が通行できない場所を該コンピュータに認識させるため、該車両が通行できる場所と通行できない場所との境界を該座標系に対応した第二のポリラインで定義したこと、を特徴とする地図データ構造。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2007−263922(P2007−263922A)
【公開日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願番号】特願2006−93213(P2006−93213)
【出願日】平成18年3月30日(2006.3.30)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願日】平成18年3月30日(2006.3.30)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]