
ナビゲーションシステムおよびナビゲーション方法並びにプログラム
【課題】先行車両と自車両との距離を考慮してより適正に追従する。
【解決手段】先行車両と自車両との距離Lが予め定めた閾値Lref未満のときには、主として先行車両動作追従案内により追従案内を行ない(S160)、先行車両と自車両との距離Lが閾値Lref以上のときには目的地までの走行経路の案内と同様の手法の先行車両位置追従案内により追従案内を行なう(S170)。これにより、先行車両と自車両との距離Lが閾値Lref未満での先行車両を視認できる程度のときには先行車両の動作を迅速に確認しながら容易に先行車両を追従することができ、先行車両と自車両との距離Lが閾値Lref以上で先行車両を視認できないときでも使い慣れた案内により先行車両をより的確に追従することができる。
【解決手段】先行車両と自車両との距離Lが予め定めた閾値Lref未満のときには、主として先行車両動作追従案内により追従案内を行ない(S160)、先行車両と自車両との距離Lが閾値Lref以上のときには目的地までの走行経路の案内と同様の手法の先行車両位置追従案内により追従案内を行なう(S170)。これにより、先行車両と自車両との距離Lが閾値Lref未満での先行車両を視認できる程度のときには先行車両の動作を迅速に確認しながら容易に先行車両を追従することができ、先行車両と自車両との距離Lが閾値Lref以上で先行車両を視認できないときでも使い慣れた案内により先行車両をより的確に追従することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーションシステムおよびナビゲーション方法並びにプログラムに関し、詳しくは、先行車両を追従するための追従案内を行なうナビゲーションシステムおよび先行車両を追従するための追従案内を行なうナビゲーション方法並びに上述のナビゲーションシステムに用いられるプログラムに関する。
【背景技術】
【0002】
従来、この種のナビゲーションシステムとしては、グループ走行時には先行する他車両の方向指示器、車速、走行位置などの走行シーン情報を受信し、他車両の走行シーン情報に基づいて他車両の進路変更を判定し、進路変更の判定結果を他車両や自車両の模式図と共に自車両のモニタに表示するものが提案されている(例えば、特許文献1参照)。このナビゲーションシステムでは、進路変更の判定結果をモニタに表示することにより、先行車両である他車両の進路変更を自車両で知ることができ、先行車両である他車両に追走することを容易なものとしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−185295号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述のナビゲーションシステムでは、先行車両の右左折などの進路変更については自車両で確認することができるが、先行車両と自車両との距離が離れて先行車両を視認することができず、更に先行車両と自車両との間に複数の交差点が存在する場合には、先行車両の進路変更に追従するのに何れの交差点で進路変更すればよいか判断できないときが生じる。
【0005】
本発明のナビゲーションシステムは、先行車両に追従する際に先行車両と自車両との距離を考慮してより適正に追従することができるシステムを提案することを主目的とする。
【課題を解決するための手段】
【0006】
本発明のナビゲーションシステムは、上述の主目的を達成するために以下の手段を採った。
【0007】
本発明のナビゲーションシステムは、
先行車両を追従するための追従案内を行なうナビゲーションシステムであって、
前記先行車両の位置に関する先行車両位置情報と前記先行車両の動作に関する先行車両動作情報とを取得する先行車両走行情報取得手段と、
前記先行車両と自車両との距離が所定距離未満であるか否かを判定する距離判定手段と、
前記距離判定手段により前記先行車両と前記自車両との距離が前記所定距離未満であると判定されたときには、前記先行車両動作情報に基づいて前記先行車両の動作を案内する第1案内手法により前記追従案内を行ない、前記距離判定手段により前記先行車両と前記自車両との距離が前記所定距離以上であると判定されたときには、前記先行車両位置情報に基づいて前記自車両の位置から前記先行車両の位置までの経路を案内する第2案内手法により前記追従案内を行なう案内手段と、
を備えることを特徴とする。
【0008】
この本発明のナビゲーションシステムでは、先行車両と自車両との距離が所定距離未満であるときには先行車両の動作に関する先行車両動作情報に基づいて先行車両の動作を案内する第1案内手法により追従案内を行ない、先行車両と自車両との距離が所定距離以上であるときには先行車両の位置に関する先行車両位置情報に基づいて自車両の位置から先行車両の位置までの経路を案内する第2案内手法により追従案内を行なう。ここで、「所定距離」は、例えば200mや300mなどの先行車両を視認することが困難となる距離として予め定めることができる。「先行車両動作情報」には、先行車両を運転している運転者の操作に関する情報や、先行車両の交差点での右左折や分岐点での分岐、先行車両の車線変更などの情報が含まれる。運転者の操作としては、ハンドル操作や、方向指示器の操作、アクセル操作、ブレーキ操作などが含まれる。先行車両の交差点での右左折や分岐点での分岐、先行車両の車線変更は、運転者によるハンドル操作と先行車両が走行している道路の情報により判断することができる。「先行車両位置情報」には、先行車両の現在位置や走行道路、走行軌跡などの情報が含まれる。このように、先行車両と自車両との距離が所定距離未満のときには、先行車両のおおよその位置が自車両にて把握できている状況であるため、先行車両の動作に関する情報に基づいて追従案内を行なうことにより、先行車両への追従が容易なものとなる。一方、先行車両と自車両との距離が所定距離以上のときには先行車両の位置に関する情報に基づいて先行車両への経路を用いて追従案内を行なうことにより、先行車両が視認できなくても先行車両の進路変更に的確に追従することができる。なお、案内手段は、第1案内手法としては、少なくとも先行車両動作情報に基づいて追従案内を行なうことができればよく、先行車両動作情報のみを用いて追従案内するものとしてもよいし、先行車両動作情報に加えて先行車両位置情報も用いて追従案内するものとしてもよい。同様に、案内手段は、第2案内手法として、少なくとも先行車両位置情報に基づいて追従案内を行なうことができればよく、先行車両位置情報のみを用いて追従案内するものとしてもよいし、先行車両位置情報に加えて先行車両動作情報も用いて追従案内するものとしてもよい。
【0009】
こうした本発明のナビゲーションシステムにおいて、前記自車両の目的地までの経路を取得する経路取得手段を更に備え、前記案内手段は、前記目的地までの前記経路を案内する経路案内を行なうとともに、当該経路案内と同じ案内態様にて前記第2案内手法による前記追従案内を行なう手段である、ものとすることもできる。こうすれば、第2案内手法を用いて追従案内を行なうときには目的地までの経路案内と同じ案内態様で追従案内を行なうから、使い慣れた案内手法による追従案内とすることができ、容易に先行車両に追従することができる。
【0010】
また、本発明のナビゲーションシステムにおいて、前記先行車両位置情報に基づいて、前記自車両前方の分岐点にて前記先行車両が進路変更したか否かを判定する分岐判定手段と、前記分岐判定手段により前記自車両前方の分岐点にて前記先行車両が進路変更したと判定された場合、前記自車両の位置から当該分岐点に至るまでに要する到達時間が所定時間以上であるか否かを判定する時間判定手段と、を更に備え、前記案内手段は、前記時間判定手段により前記到達時間が前記所定時間以上であると判定されたときには、前記距離判定手段により前記先行車両と前記自車両との距離が前記所定距離未満であると判定された場合であっても、前記第2案内手法により前記追従案内を行なう手段である、ことを特徴とするものとすることもできる。ここで、「所定時間」としては、例えば、5秒や10秒あるいは15秒などを用いることができる。また、「自車両前方の分岐点」には、自車両前方の交差点での右左折や自車両前方の分岐点での分岐が含まれる。こうすれば、先行車両の進路変更に追従するときに自車両が進路変更するまでの時間が所定時間以上となるときには第2案内手法による追従案内を行なうことができる。この場合、例えば、第2案内手法として、分岐点近傍に近づいたときには分岐点の拡大図を用いて案内するときには、この拡大図を用いて追従案内するものとなり、先行車両への追従のための進路変更を容易なものとすることができる。
【0011】
さらに、本発明のナビゲーションシステムにおいて、前記第1案内手法は、前記先行車両動作情報に基づいて得られる前記先行車両の進路変更に関する情報として方向指示器の操作情報と前記先行車両が走行している車線の情報とを表示することにより案内する手法である、ことを特徴とするものとすることもできる。こうすれば、先行車両の動作を自車両の運転者に迅速に知らせることができる。この場合、前記第1案内手法は、前記先行車両と前記自車両との距離,前記先行車両から前記自車両までの走行路における交差点の数,前記先行車両から前記自車両までの走行路における信号機の数のいずれかを表示して案内する手法である、ことを特徴とするものとすることもできる。こうすれば、先行車両と自車両との間の距離や交差点の数、信号機の数などを先行車両の動作と共に自車両の運転者に迅速に知らせることができる。また、前記第1案内手法は、前記自車両の車両前方が上を向いている模式図と、前記先行車両の車両前方が前記自車両の向きに対して相対的に向いている模式図と、を用いて案内する手法である、ことを特徴とするものとすることもできる。こうすれば、先行車両の向いている方向を自車両の向きに対する相対的な方向として自車両の運転者に知らせることができる。
【0012】
本発明のナビゲーション方法は、
先行車両を追従するための追従案内を行なうナビゲーション方法であって、
前記先行車両の位置に関する先行車両位置情報と前記先行車両の動作に関する先行車両動作情報とを取得し、
前記先行車両と自車両との距離が所定距離未満であるときには、前記先行車両動作情報に基づいて前記先行車両の動作を案内する第1案内手法により前記追従案内を行ない、前記先行車両と前記自車両との距離が前記所定距離以上であるときには、前記先行車両位置情報に基づいて前記自車両の位置から前記先行車両の位置までの経路を案内する第2案内手法により前記追従案内を行なう、
ことを特徴とする。
【0013】
この本発明のナビゲーション方法では、先行車両と自車両との距離が所定距離未満であるときには先行車両の動作に関する先行車両動作情報に基づいて先行車両の動作を案内する第1案内手法により追従案内を行ない、先行車両と自車両との距離が所定距離以上であるときには先行車両の位置に関する先行車両位置情報に基づいて自車両の位置から先行車両の位置までの経路を案内する第2案内手法により追従案内を行なう。このように、先行車両と自車両との距離が所定距離未満のときには先行車両の動作に関する情報に基づいて追従案内を行なうことにより、先行車両への追従を容易なものとすることができ、先行車両と自車両との距離が所定距離以上のときには先行車両の位置に関する情報に基づいて先行車両への経路を用いて追従案内を行なうことにより、先行車両が視認できなくても先行車両の進路変更に的確に追従することができる。なお、「所定距離」や「先行車両動作情報」、「先行車両位置情報」については、上述の本発明のナビゲーションシステムと同様である。
【0014】
本発明のプログラムは、
先行車両を追従するための追従案内を行なうナビゲーションシステムに用いられるプログラムであって、
前記先行車両と自車両との距離が所定距離未満であるときには、前記先行車両の動作に関する先行車両動作情報に基づいて前記先行車両の動作を案内する第1案内手法により前記追従案内を行なう第1モジュールと、
前記先行車両と前記自車両との距離が前記所定距離以上であるときには、前記先行車両の位置に関する先行車両位置情報に基づいて前記自車両の位置から前記先行車両の位置までの経路を案内する第2案内手法により前記追従案内を行なう第2モジュールと、
を備えることを特徴とする。
【0015】
この本発明のプログラムは、先行車両と自車両との距離が所定距離未満であるときには、先行車両の動作に関する先行車両動作情報に基づいて先行車両の動作を案内する第1案内手法により追従案内を行なう第1モジュールを実行することにより、先行車両と自車両との距離が所定距離未満であるときに第1案内手法による追従案内を行ない、先行車両と自車両との距離が所定距離以上であるときには、先行車両の位置に関する先行車両位置情報に基づいて自車両の位置から前記先行車両の位置までの経路を案内する第2案内手法により追従案内を行なう第2モジュールを実行することにより、先行車両と自車両との距離が所定距離以上であるときに第2案内手法による追従案内を行なうナビゲーションシステムとすることができる。このように、ナビゲーションシステムを機能させるから、先行車両と自車両との距離が所定距離未満のときには先行車両の動作に関する情報に基づいて追従案内を行なうことにより、先行車両への追従を容易なものすることができ、先行車両と自車両との距離が所定距離以上のときには先行車両の位置に関する情報に基づいて先行車両への経路を用いて追従案内を行なうことにより、先行車両が視認できなくても先行車両の進路変更に的確に追従することができる。なお、「所定距離」や「先行車両動作情報」、「先行車両位置情報」については、上述の本発明のナビゲーションシステムと同様である。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施例としてのナビゲーションシステム20の構成の概略を示す構成図である。
【図2】電子制御ユニット30によって実行される追従案内処理の一例を示すフローチャートである。
【図3】先行車両動作追従案内処理の一例を示すフローチャートである。
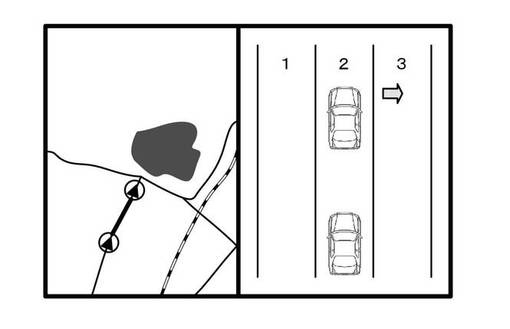
【図4】動作案内図をディスプレイ22に表示している様子の一例を示す説明図である。
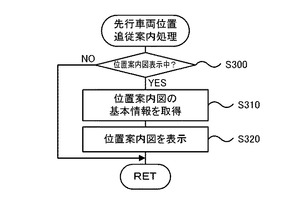
【図5】先行車両位置追従案内処理の一例を示すフローチャートである。
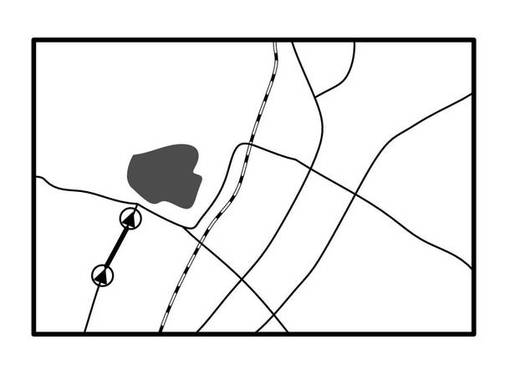
【図6】位置案内図をディスプレイ22に表示している様子の一例を示す説明図である。
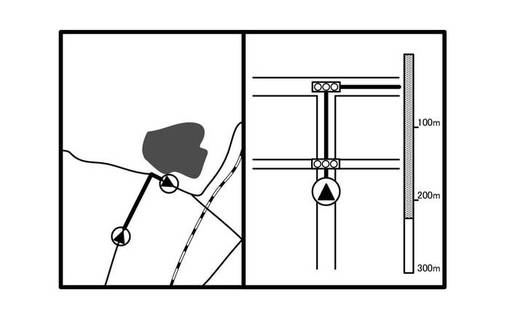
【図7】拡大図を用いた位置案内図をディスプレイ22に表示している様子の一例を示す説明図である。
【図8】変形例の動作案内図の一例を示す説明図である。
【発明を実施するための形態】
【0017】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例】
【0018】
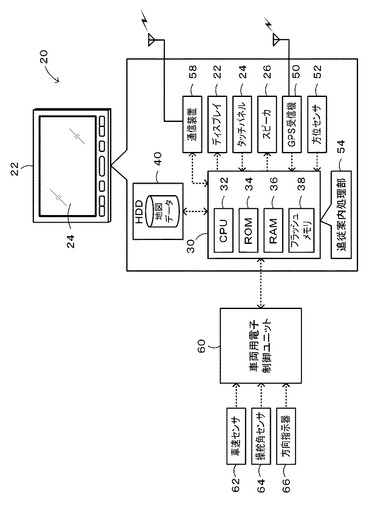
図1は、本発明の一実施例としてのナビゲーションシステム20の構成の概略を示す構成図である。実施例のナビゲーションシステム20は、文字や画像を表示する画面を有する例えば液晶ディスプレイとして構成されたディスプレイ22と、ディスプレイ22の画面に取り付けられた抵抗膜方式や静電容量方式などによるタッチパネル24と、装置全体をコントロールする電子制御ユニット30と、各種アプリケーションソフトウェアや地図データなどを記憶する大容量メモリとしてのハードディスクドライブ(以下、HDDという)40と、他車に搭載された同様のナビゲーションシステムや情報センターなどと通信するための通信装置58と、を備え、図示しない自動車に搭載された車載バッテリからの電力供給を受けて作動する。
【0019】
電子制御ユニット30は、CPU32を中心とするマイクロプロセッサとして構成されており、CPU32の他に各種処理プログラムを記憶するROM34と、データを一時的に記憶するRAM36と、記憶したデータを保持する不揮発性のフラッシュメモリ38と、図示しない入出力ポートおよび通信ポートとを備える。電子制御ユニット30には、操作者のタッチ位置を検出するタッチパネル24からの信号やHDD40から読み出したデータ,GPS(Global Positioning System)衛星からの信号をGPSアンテナを介して受信するGPS受信機50からの信号,車両の進行方向やその変化を検出する例えばジャイロセンサにより構成された方位センサ52からの信号,通信アンテナを介して他車に搭載されたナビゲーションシステムや情報センターから送信される情報を受信する通信装置58からの情報としての信号などが入力ポートを介して入力されている。電子制御ユニット30からは、ディスプレイ22への表示信号やアンプを内蔵したスピーカ26への音声信号,HDD40に書き込むデータ,通信装置58から送信する情報としての信号などが出力ポートを介して出力されている。また、電子制御ユニット30は、車両全体をコントロールする車両用電子制御ユニット60と通信ポートを介して接続されており、車両用電子制御ユニット60からは車速センサ60からの車速や操舵角センサ62からの操舵角,方向指示器64からの指示信号などの車両の運転操作や車両の動作に関する情報を受信している。
【0020】
実施例のナビゲーションシステム20では、電子制御ユニット30は、HDD40から必要なアプリケーションソフトウェアや地図データを読み出して各種処理を実行する。例えば、GPS受信機50からの信号や方位センサ52からの信号に基づいて車両の現在位置を特定するロケーション処理や、ディスプレイ22に地図画像を表示する地図表示処理、目的地への走行経路を探索して地図表示したりスピーカ26からの音声出力によりルート案内を行なうナビゲーション処理、先行車両が設定されたときに先行車両に追従するために追従案内処理部54による追従案内処理などを実行する。ここで、追従案内処理部54は、対応するアプリケーションソフトウェアとハードウエアとが一体となって実現される。なお、先行車両の設定は、例えば、実施例のナビゲーションシステム20と同様の機能を有するナビゲーションシステムを搭載している他車両との通信により、他車両を特定することによって行なうことができる。
【0021】
実施例のHDD40は、地図データとして、予め定めた複数の縮尺で地図画像を表示可能とする地図画像データや、道路の幅員や車線数,歩道の幅などの道路データ、交差点や分岐などが更新日時やバージョンなどの更新履歴情報と共に記憶されている。そして、道路工事などにより地図画像データや道路データに変更が生じたり、交通量の変化や信号機の設置などにより道路時間データに変更が生じたりすると、変更された各データが情報センターから通信により送信され、これを通信装置58により受信してHDD40に書き込むことにより、各データの更新を行ない、更新日時やバージョンの更新も行なわれる。
【0022】
こうして構成された実施例のナビゲーションシステム20によって行なわれる処理、特に先行車両を追従するための追従案内処理について説明する。図2は、電子制御ユニット30によって実行される追従案内処理の一例を示すフローチャートである。この処理は、追従案内するための先行車両が設定されているときに繰り返し実行される。
【0023】
追従案内処理が実行されると、電子制御ユニット30のCPU32は、まず、通信装置58と先行車両の通信装置とによる通信により、先行車両の位置に関する先行車両位置情報と先行車両の動作に関する先行車両動作情報とからなる先行車両情報を取得する。ここで、先行車両位置情報としては、先行車両のナビゲーションシステムにより検出される先行車両の現在位置や走行道路、走行軌跡などの情報が含まれる。先行車両動作情報としては、先行車両を運転している運転者の操作、例えば、ハンドル操作や方向指示器の操作、アクセル操作、ブレーキ操作に関する情報や、先行車両の交差点での右左折や分岐点での分岐、先行車両の車線変更などの情報が含まれる。先行車両の交差点での右左折や分岐点での分岐、先行車両の車線変更は、先行車両の運転者によるハンドル操作と先行車両が走行している道路の情報により判断することができる。実施例では、先行車両動作情報として、方向指示器の操作、先行車両の交差点での右左折、先行車両の分岐点での分岐、先行車両の車線変更を用いるものとした。
【0024】
こうして先行車両情報を取得すると、先行車両と自車両との距離Lを計算し(ステップS110)、計算した距離Lが予め定めた閾値Lref以上であるか否かを判定する(ステップS120)。先行車両と自車両との距離Lは、先行車両の現在位置と先行車両の走行軌跡と自車両の現在位置とによって計算することができる。この計算は、例えば、先行車両の現在位置を目的地とみなすと共に走行軌跡を走行経路とみなして目的地までの距離を計算する際の手法を用いることができる。また、閾値Lrefは、自車両から先行車両の視認が困難になる程度の距離であり、例えば、200mや300m,400mなどを用いることができる。
【0025】
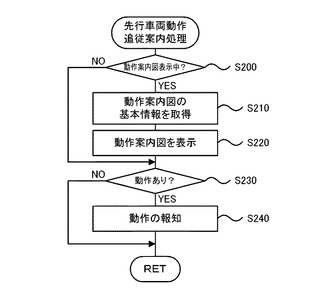
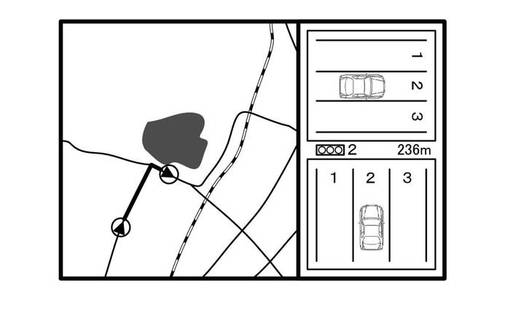
先行車両と自車両との距離Lが閾値Lref未満のときには、先行車両に交差点での右左折や分岐点での分岐による進路変更があったか否かを判定し(ステップS130)、先行車両に進路変更がなかったと判定されたときには、先行車両の動作に基づく追従案内(先行車両動作追従案内)を実行して(ステップS160)、本処理を終了する。先行車両動作追従案内は、図3に例示する先行車両動作追従案内処理によって行なわれる。この処理では、まず、先行車両の動作の案内を示す動作案内図がディスプレイ22に表示されている最中であるか否かを判定し(ステップS200)、動作案内図が表示されていないときには、動作案内図の基本情報を取得すると共に(ステップS210)、ディスプレイ22に動作案内図を表示する(ステップS220)。動作案内図の基本情報としては、走行路の車線数や先行車両が走行している車線,自車両が走行している車線などを挙げることができる。動作案内図をディスプレイ22に表示している様子の一例を図4に示す。実施例では、ディスプレイ22の左側半分には先行車両の現在位置と自車両の現在位置とを地図データと共に示し、右側半分に動作案合図を示すものとした。この動作案内図では、車線を用いて走行路を模式的に示し、走行路の上側で先行車両が走行している車線上に先行車両の図柄を示し、走行路の下側で自車両が走行している車線上に自車両の図柄を示している。ステップS200で動作案内図を表示中であると判定されたときや動作案内図を表示した後は、先行車両に動作があるか否かを判定し(ステップS230)、動作があるときには動作案内図に表示すると共に動作に応じたアナウンス内容をスピーカ26から音声出力することによって動作を報知して(ステップS240)、本処理を終了する。先行車両に動作があるか否かの判定は、先行車両動作情報(実施例では、方向指示器の操作、先行車両の右左折、先行車両の車線変更)によって行なうことができる。図4の動作案内図では、先行車両の運転者が方向指示器を右折側に操作したときの報知を車線3の矢印として示している。動作に応じたアナウンス内容としては、方向指示器の操作、先行車両の右左折、先行車両の車線変更に応じたもの、例えば、「右ウインカを指示しました。」や「左折しました。」、「右の車線に車線変更しました。」などを挙げることができる。ステップS230で先行車両の動作がないと判定されたときには、動作の報知を行なうことなく、本処理を終了する。このように、先行車両と自車両との距離Lが閾値Lref未満のときには先行車両の動作を示す動作案内図を用いて追従案内することにより、自車両の運転者は先行車両の動作に応じて的確に先行車両を追従する操作を行なうことができる。
【0026】
図2の追従案内処理のステップS120で先行車両と自車両との距離Lが閾値Lref以上であると判定されたときには、先行車両の位置に基づく追従案内(先行車両位置追従案内)を実行して(ステップS170)、本処理を終了する。先行車両位置追従案内は、図5に例示する先行車両位置追従案内処理によって行なわれる。この処理では、まず、先行車両の位置の案内を示す位置案内図がディスプレイ22に表示されている最中であるか否かを判定し(ステップS300)、位置案内図が表示されていないときには、位置案内図の基本情報を取得すると共に(ステップS310)、ディスプレイ22に位置案内図を表示して(ステップS320)、本処理を終了する。位置案内図の基本情報としては、先行車両の現在位置や走行軌跡,自車両の現在位置などを挙げることができる。位置案内図をディスプレイ22に表示している様子の一例を図6に示す。実施例では、先行車両の現在位置を目的地とみなすと共に先行車両の走行軌跡を走行経路として一般的な目的地までの走行経路を案内する手法と同様の手法を用いるものとした。目的地までの走行経路の案内との相違は、図6に示すように、目的地のマークに代えて先行車両のマークを用いている点である。このように、先行車両と自車両との距離Lが閾値Lref以上のときには先行車両の位置に基づく位置案内図を用いて追従案内することにより、先行車両を視認できなくても先行車両を追従することができる。特に、実施例では、目的地までの走行経路の案内と同様の手法により追従案内するから、自車両の運転者は使い慣れた案内手法によって追従案内することができる。
【0027】
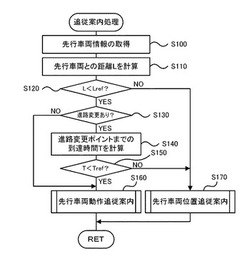
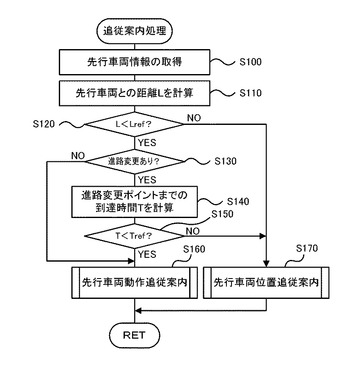
図2の追従案内処理のステップS130で先行車両に進路変更があったと判定されたときには、自車両が進路変更のポイント(交差点や分岐点)まで到達するのに要する時間(到達時間)Tを計算し(ステップS140)、計算した到達時間Tが予め定めた閾値Tref以上であるか否かを判定し(ステップS150)、到達時間Tが閾値Tref未満のときには、先行車両動作追従案内を実行して(ステップS160)、本処理を終了し、到達時間Tが閾値Tref以上のときには、先行車両と自車両との距離Lが閾値Lref未満ではあるが先行車両位置追従案内を実行して(ステップS170)、本処理を終了する。ここで、先行車両に進路変更があったか否かの判定は、先行車両動作情報によって行なうことができる。到達時間Tは、例えば、進路変更のポイントを目的地としたときの目的地までの推定所要時間として計算したり、自車両の現在位置と進路変更のポイントとの距離を車速で除して係数を乗じることによって計算したりすることができる。閾値Trefは、先行車両位置追従案内により案内するのに十分な時間として定めることができ、例えば、5秒や10秒,15秒などを用いることができる。このように、進路変更のポイントまでの到達時間Tが閾値Tref以上のときには、先行車両と自車両との距離Lが閾値Lref未満であっても先行車両位置追従案内により追従案内することにより、先行車両の追従のための進路変更をより確実に行なうことができる。しかも、実施例では、先行車両位置追従案内は目的地までの走行経路の案内と同様の手法によるものとしているから、目的地までの走行経路の案内において交差点や分岐点で進路変更する場合に拡大図の表示とアナウンスが行なわれるものとすれば、先行車両位置追従案内においても同様に拡大図の表示とアナウンスが行なわれる。このため、自車両の運転者は、使い慣れた拡大図とアナウンスとによる案内を受けることになるから、より確実に先行車両の追従のための進路変更を行なうことができる。
【0028】
以上説明した実施例のナビゲーションシステム20によれば、先行車両と自車両との距離Lが予め定めた閾値Lref未満のときには、主として先行車両動作追従案内により追従案内を行ない、先行車両と自車両との距離Lが閾値Lref以上のときには、目的地までの走行経路の案内と同様の手法の先行車両位置追従案内により追従案内を行なうから、先行車両と自車両との距離Lが閾値Lref未満での先行車両を視認できる程度のときには先行車両の動作を迅速に確認しながら容易に先行車両を追従することができ、先行車両と自車両との距離Lが閾値Lref以上で先行車両を視認できないときでも使い慣れた案内により先行車両をより的確に追従することができる。しかも、進路変更のポイントまでの到達時間Tが閾値Tref以上のときには、先行車両と自車両との距離Lが閾値Lref未満であっても先行車両位置追従案内により追従案内を行なうから、使い慣れた案内により先行車両の進路変更に対して確実に進路変更して先行車両を追従することができる。さらに、目的地までの走行経路の案内において交差点や分岐点で進路変更する場合に拡大図の表示とアナウンスが行なわれるものとすれば、使い慣れた拡大図とアナウンスとによる案内により、より確実に先行車両の追従を行なうことができ、先行車両の追従を容易なものとすることができる。
【0029】
実施例のナビゲーションシステム20では、動作案内図として、車線を用いて走行路を模式的に示し、走行路の上側の先行車両が走行している車線上に先行車両の図柄を示し、走行路の下側に自車両が走行している車線上に自車両の図柄を示すものとしたが、動作案内図を、先行車両が走行している走行路と先行車両とを示す先行車両図と、自車両が走行している走行路と自車両とを示す自車両図とによって構成するものとしてもよい。この場合、先行車両の車両前方が自車両の向きに対して相対的に向いている先行車両図を用いるものとしてもよい。この変形例の動作案内図の一例を図8に示す。図8の動作案内図(図中、右側の図)では、上側に先行車両図が示されており、下側に自車両図が示されており、中央に先行車両と自車両との間に存在する信号機の数と先行車両と自車両との距離Lとが示されている。なお、この変形例では、中央に先行車両と自車両との間に存在する信号機の数と先行車両と自車両との距離Lとを示すものとしたが、この他に先行車両と自車両との間に存在する交差点の数を示すものとしてもよいし、先行車両と自車両との間に存在する信号機の数や先行車両と自車両との距離L,先行車両と自車両との間に存在する交差点の数のいずれか一つのみを示すものとしたり、いずれも示さないものとしても構わない。
【0030】
実施例のナビゲーションシステム20では、先行車両動作追従案内による追従案内では、ディスプレイ22の左側半分には先行車両の現在位置と自車両の現在位置とを地図データと共に示し、右側半分に動作案合図を示すものとしたが、ディスプレイ22の全面に動作案内図のみを表示するものとしても構わない。
【0031】
実施例のナビゲーションシステム20では、先行車両位置追従案内による追従案内では、目的地までの走行経路の案内と同様の手法により追従案内するものとしたが、先行車両の位置に基づいて追従案内するものであればよいから、目的地までの走行経路の案内と異なる手法により追従案内するものとしても構わない。
【0032】
実施例のナビゲーションシステム20では、先行車両情報は先行車両との通信により取得するものとしたが、先行車両が情報センターとの通信により先行車両情報を情報センターに送信し、情報センターが先行車両から取得した先行車両情報を情報センターと自車両との通信により自車両が取得するものとしてもよい。
【0033】
実施例のナビゲーションシステム20では、先行車両自身が、先行車両の交差点での右左折や分岐点での分岐などの進路変更を、運転者の操作や車両の挙動に基づいて判断し、その判断結果を先行車両動作情報として取得するものとしたが、先行車両動作情報として、先行車両の運転者の操作や車両の挙動を取得し、当該取得した情報に基づいて、自車両で先行車両の進路変更を判断するものとしてもよい。
【0034】
実施例のナビゲーションシステム20では、先行車両動作情報として、方向指示器の操作、先行車両の交差点での右左折、先行車両の分岐点での分岐、先行車両の車線変更を用いるものとしたが、これに加えて、ハンドル操作やアクセル操作、ブレーキ操作を用いるものとしてもよい。この場合、動作案内図にハンドル操作やアクセル操作,ブレーキ操作を表示したり、ハンドル操作やアクセル操作,ブレーキ操作に対応するアナウンス内容、例えば、「ハンドルを右に切りました。」や「加速しています。」、「ブレーキペダルを踏みました。」などのアナウンス内容をスピーカ26から音声出力するものとしてもよい。
【0035】
実施例では、本発明をナビゲーションシステムとして説明したが、ナビゲーション方法の形態としてもよいし、ナビゲーションシステムを構築するためのプログラムの形態としてもよい。
【0036】
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
【産業上の利用可能性】
【0037】
本発明は、ナビゲーションシステムの製造産業などに利用可能である。
【符号の説明】
【0038】
20 ナビゲーションシステム、22 ディスプレイ、24 タッチパネル、26 スピーカ、30 電子制御ユニット、32 CPU、34 ROM、36 RAM、38 フラッシュメモリ、40 ハードディスクドライブ(HDD)、50 GPS受信機、52 方位センサ、54 追従案内処理部、58 通信装置、60 車両用電子制御ユニット、62 車速センサ、64 操舵角センサ、66 方向指示器。
【技術分野】
【0001】
本発明は、ナビゲーションシステムおよびナビゲーション方法並びにプログラムに関し、詳しくは、先行車両を追従するための追従案内を行なうナビゲーションシステムおよび先行車両を追従するための追従案内を行なうナビゲーション方法並びに上述のナビゲーションシステムに用いられるプログラムに関する。
【背景技術】
【0002】
従来、この種のナビゲーションシステムとしては、グループ走行時には先行する他車両の方向指示器、車速、走行位置などの走行シーン情報を受信し、他車両の走行シーン情報に基づいて他車両の進路変更を判定し、進路変更の判定結果を他車両や自車両の模式図と共に自車両のモニタに表示するものが提案されている(例えば、特許文献1参照)。このナビゲーションシステムでは、進路変更の判定結果をモニタに表示することにより、先行車両である他車両の進路変更を自車両で知ることができ、先行車両である他車両に追走することを容易なものとしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−185295号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述のナビゲーションシステムでは、先行車両の右左折などの進路変更については自車両で確認することができるが、先行車両と自車両との距離が離れて先行車両を視認することができず、更に先行車両と自車両との間に複数の交差点が存在する場合には、先行車両の進路変更に追従するのに何れの交差点で進路変更すればよいか判断できないときが生じる。
【0005】
本発明のナビゲーションシステムは、先行車両に追従する際に先行車両と自車両との距離を考慮してより適正に追従することができるシステムを提案することを主目的とする。
【課題を解決するための手段】
【0006】
本発明のナビゲーションシステムは、上述の主目的を達成するために以下の手段を採った。
【0007】
本発明のナビゲーションシステムは、
先行車両を追従するための追従案内を行なうナビゲーションシステムであって、
前記先行車両の位置に関する先行車両位置情報と前記先行車両の動作に関する先行車両動作情報とを取得する先行車両走行情報取得手段と、
前記先行車両と自車両との距離が所定距離未満であるか否かを判定する距離判定手段と、
前記距離判定手段により前記先行車両と前記自車両との距離が前記所定距離未満であると判定されたときには、前記先行車両動作情報に基づいて前記先行車両の動作を案内する第1案内手法により前記追従案内を行ない、前記距離判定手段により前記先行車両と前記自車両との距離が前記所定距離以上であると判定されたときには、前記先行車両位置情報に基づいて前記自車両の位置から前記先行車両の位置までの経路を案内する第2案内手法により前記追従案内を行なう案内手段と、
を備えることを特徴とする。
【0008】
この本発明のナビゲーションシステムでは、先行車両と自車両との距離が所定距離未満であるときには先行車両の動作に関する先行車両動作情報に基づいて先行車両の動作を案内する第1案内手法により追従案内を行ない、先行車両と自車両との距離が所定距離以上であるときには先行車両の位置に関する先行車両位置情報に基づいて自車両の位置から先行車両の位置までの経路を案内する第2案内手法により追従案内を行なう。ここで、「所定距離」は、例えば200mや300mなどの先行車両を視認することが困難となる距離として予め定めることができる。「先行車両動作情報」には、先行車両を運転している運転者の操作に関する情報や、先行車両の交差点での右左折や分岐点での分岐、先行車両の車線変更などの情報が含まれる。運転者の操作としては、ハンドル操作や、方向指示器の操作、アクセル操作、ブレーキ操作などが含まれる。先行車両の交差点での右左折や分岐点での分岐、先行車両の車線変更は、運転者によるハンドル操作と先行車両が走行している道路の情報により判断することができる。「先行車両位置情報」には、先行車両の現在位置や走行道路、走行軌跡などの情報が含まれる。このように、先行車両と自車両との距離が所定距離未満のときには、先行車両のおおよその位置が自車両にて把握できている状況であるため、先行車両の動作に関する情報に基づいて追従案内を行なうことにより、先行車両への追従が容易なものとなる。一方、先行車両と自車両との距離が所定距離以上のときには先行車両の位置に関する情報に基づいて先行車両への経路を用いて追従案内を行なうことにより、先行車両が視認できなくても先行車両の進路変更に的確に追従することができる。なお、案内手段は、第1案内手法としては、少なくとも先行車両動作情報に基づいて追従案内を行なうことができればよく、先行車両動作情報のみを用いて追従案内するものとしてもよいし、先行車両動作情報に加えて先行車両位置情報も用いて追従案内するものとしてもよい。同様に、案内手段は、第2案内手法として、少なくとも先行車両位置情報に基づいて追従案内を行なうことができればよく、先行車両位置情報のみを用いて追従案内するものとしてもよいし、先行車両位置情報に加えて先行車両動作情報も用いて追従案内するものとしてもよい。
【0009】
こうした本発明のナビゲーションシステムにおいて、前記自車両の目的地までの経路を取得する経路取得手段を更に備え、前記案内手段は、前記目的地までの前記経路を案内する経路案内を行なうとともに、当該経路案内と同じ案内態様にて前記第2案内手法による前記追従案内を行なう手段である、ものとすることもできる。こうすれば、第2案内手法を用いて追従案内を行なうときには目的地までの経路案内と同じ案内態様で追従案内を行なうから、使い慣れた案内手法による追従案内とすることができ、容易に先行車両に追従することができる。
【0010】
また、本発明のナビゲーションシステムにおいて、前記先行車両位置情報に基づいて、前記自車両前方の分岐点にて前記先行車両が進路変更したか否かを判定する分岐判定手段と、前記分岐判定手段により前記自車両前方の分岐点にて前記先行車両が進路変更したと判定された場合、前記自車両の位置から当該分岐点に至るまでに要する到達時間が所定時間以上であるか否かを判定する時間判定手段と、を更に備え、前記案内手段は、前記時間判定手段により前記到達時間が前記所定時間以上であると判定されたときには、前記距離判定手段により前記先行車両と前記自車両との距離が前記所定距離未満であると判定された場合であっても、前記第2案内手法により前記追従案内を行なう手段である、ことを特徴とするものとすることもできる。ここで、「所定時間」としては、例えば、5秒や10秒あるいは15秒などを用いることができる。また、「自車両前方の分岐点」には、自車両前方の交差点での右左折や自車両前方の分岐点での分岐が含まれる。こうすれば、先行車両の進路変更に追従するときに自車両が進路変更するまでの時間が所定時間以上となるときには第2案内手法による追従案内を行なうことができる。この場合、例えば、第2案内手法として、分岐点近傍に近づいたときには分岐点の拡大図を用いて案内するときには、この拡大図を用いて追従案内するものとなり、先行車両への追従のための進路変更を容易なものとすることができる。
【0011】
さらに、本発明のナビゲーションシステムにおいて、前記第1案内手法は、前記先行車両動作情報に基づいて得られる前記先行車両の進路変更に関する情報として方向指示器の操作情報と前記先行車両が走行している車線の情報とを表示することにより案内する手法である、ことを特徴とするものとすることもできる。こうすれば、先行車両の動作を自車両の運転者に迅速に知らせることができる。この場合、前記第1案内手法は、前記先行車両と前記自車両との距離,前記先行車両から前記自車両までの走行路における交差点の数,前記先行車両から前記自車両までの走行路における信号機の数のいずれかを表示して案内する手法である、ことを特徴とするものとすることもできる。こうすれば、先行車両と自車両との間の距離や交差点の数、信号機の数などを先行車両の動作と共に自車両の運転者に迅速に知らせることができる。また、前記第1案内手法は、前記自車両の車両前方が上を向いている模式図と、前記先行車両の車両前方が前記自車両の向きに対して相対的に向いている模式図と、を用いて案内する手法である、ことを特徴とするものとすることもできる。こうすれば、先行車両の向いている方向を自車両の向きに対する相対的な方向として自車両の運転者に知らせることができる。
【0012】
本発明のナビゲーション方法は、
先行車両を追従するための追従案内を行なうナビゲーション方法であって、
前記先行車両の位置に関する先行車両位置情報と前記先行車両の動作に関する先行車両動作情報とを取得し、
前記先行車両と自車両との距離が所定距離未満であるときには、前記先行車両動作情報に基づいて前記先行車両の動作を案内する第1案内手法により前記追従案内を行ない、前記先行車両と前記自車両との距離が前記所定距離以上であるときには、前記先行車両位置情報に基づいて前記自車両の位置から前記先行車両の位置までの経路を案内する第2案内手法により前記追従案内を行なう、
ことを特徴とする。
【0013】
この本発明のナビゲーション方法では、先行車両と自車両との距離が所定距離未満であるときには先行車両の動作に関する先行車両動作情報に基づいて先行車両の動作を案内する第1案内手法により追従案内を行ない、先行車両と自車両との距離が所定距離以上であるときには先行車両の位置に関する先行車両位置情報に基づいて自車両の位置から先行車両の位置までの経路を案内する第2案内手法により追従案内を行なう。このように、先行車両と自車両との距離が所定距離未満のときには先行車両の動作に関する情報に基づいて追従案内を行なうことにより、先行車両への追従を容易なものとすることができ、先行車両と自車両との距離が所定距離以上のときには先行車両の位置に関する情報に基づいて先行車両への経路を用いて追従案内を行なうことにより、先行車両が視認できなくても先行車両の進路変更に的確に追従することができる。なお、「所定距離」や「先行車両動作情報」、「先行車両位置情報」については、上述の本発明のナビゲーションシステムと同様である。
【0014】
本発明のプログラムは、
先行車両を追従するための追従案内を行なうナビゲーションシステムに用いられるプログラムであって、
前記先行車両と自車両との距離が所定距離未満であるときには、前記先行車両の動作に関する先行車両動作情報に基づいて前記先行車両の動作を案内する第1案内手法により前記追従案内を行なう第1モジュールと、
前記先行車両と前記自車両との距離が前記所定距離以上であるときには、前記先行車両の位置に関する先行車両位置情報に基づいて前記自車両の位置から前記先行車両の位置までの経路を案内する第2案内手法により前記追従案内を行なう第2モジュールと、
を備えることを特徴とする。
【0015】
この本発明のプログラムは、先行車両と自車両との距離が所定距離未満であるときには、先行車両の動作に関する先行車両動作情報に基づいて先行車両の動作を案内する第1案内手法により追従案内を行なう第1モジュールを実行することにより、先行車両と自車両との距離が所定距離未満であるときに第1案内手法による追従案内を行ない、先行車両と自車両との距離が所定距離以上であるときには、先行車両の位置に関する先行車両位置情報に基づいて自車両の位置から前記先行車両の位置までの経路を案内する第2案内手法により追従案内を行なう第2モジュールを実行することにより、先行車両と自車両との距離が所定距離以上であるときに第2案内手法による追従案内を行なうナビゲーションシステムとすることができる。このように、ナビゲーションシステムを機能させるから、先行車両と自車両との距離が所定距離未満のときには先行車両の動作に関する情報に基づいて追従案内を行なうことにより、先行車両への追従を容易なものすることができ、先行車両と自車両との距離が所定距離以上のときには先行車両の位置に関する情報に基づいて先行車両への経路を用いて追従案内を行なうことにより、先行車両が視認できなくても先行車両の進路変更に的確に追従することができる。なお、「所定距離」や「先行車両動作情報」、「先行車両位置情報」については、上述の本発明のナビゲーションシステムと同様である。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施例としてのナビゲーションシステム20の構成の概略を示す構成図である。
【図2】電子制御ユニット30によって実行される追従案内処理の一例を示すフローチャートである。
【図3】先行車両動作追従案内処理の一例を示すフローチャートである。
【図4】動作案内図をディスプレイ22に表示している様子の一例を示す説明図である。
【図5】先行車両位置追従案内処理の一例を示すフローチャートである。
【図6】位置案内図をディスプレイ22に表示している様子の一例を示す説明図である。
【図7】拡大図を用いた位置案内図をディスプレイ22に表示している様子の一例を示す説明図である。
【図8】変形例の動作案内図の一例を示す説明図である。
【発明を実施するための形態】
【0017】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例】
【0018】
図1は、本発明の一実施例としてのナビゲーションシステム20の構成の概略を示す構成図である。実施例のナビゲーションシステム20は、文字や画像を表示する画面を有する例えば液晶ディスプレイとして構成されたディスプレイ22と、ディスプレイ22の画面に取り付けられた抵抗膜方式や静電容量方式などによるタッチパネル24と、装置全体をコントロールする電子制御ユニット30と、各種アプリケーションソフトウェアや地図データなどを記憶する大容量メモリとしてのハードディスクドライブ(以下、HDDという)40と、他車に搭載された同様のナビゲーションシステムや情報センターなどと通信するための通信装置58と、を備え、図示しない自動車に搭載された車載バッテリからの電力供給を受けて作動する。
【0019】
電子制御ユニット30は、CPU32を中心とするマイクロプロセッサとして構成されており、CPU32の他に各種処理プログラムを記憶するROM34と、データを一時的に記憶するRAM36と、記憶したデータを保持する不揮発性のフラッシュメモリ38と、図示しない入出力ポートおよび通信ポートとを備える。電子制御ユニット30には、操作者のタッチ位置を検出するタッチパネル24からの信号やHDD40から読み出したデータ,GPS(Global Positioning System)衛星からの信号をGPSアンテナを介して受信するGPS受信機50からの信号,車両の進行方向やその変化を検出する例えばジャイロセンサにより構成された方位センサ52からの信号,通信アンテナを介して他車に搭載されたナビゲーションシステムや情報センターから送信される情報を受信する通信装置58からの情報としての信号などが入力ポートを介して入力されている。電子制御ユニット30からは、ディスプレイ22への表示信号やアンプを内蔵したスピーカ26への音声信号,HDD40に書き込むデータ,通信装置58から送信する情報としての信号などが出力ポートを介して出力されている。また、電子制御ユニット30は、車両全体をコントロールする車両用電子制御ユニット60と通信ポートを介して接続されており、車両用電子制御ユニット60からは車速センサ60からの車速や操舵角センサ62からの操舵角,方向指示器64からの指示信号などの車両の運転操作や車両の動作に関する情報を受信している。
【0020】
実施例のナビゲーションシステム20では、電子制御ユニット30は、HDD40から必要なアプリケーションソフトウェアや地図データを読み出して各種処理を実行する。例えば、GPS受信機50からの信号や方位センサ52からの信号に基づいて車両の現在位置を特定するロケーション処理や、ディスプレイ22に地図画像を表示する地図表示処理、目的地への走行経路を探索して地図表示したりスピーカ26からの音声出力によりルート案内を行なうナビゲーション処理、先行車両が設定されたときに先行車両に追従するために追従案内処理部54による追従案内処理などを実行する。ここで、追従案内処理部54は、対応するアプリケーションソフトウェアとハードウエアとが一体となって実現される。なお、先行車両の設定は、例えば、実施例のナビゲーションシステム20と同様の機能を有するナビゲーションシステムを搭載している他車両との通信により、他車両を特定することによって行なうことができる。
【0021】
実施例のHDD40は、地図データとして、予め定めた複数の縮尺で地図画像を表示可能とする地図画像データや、道路の幅員や車線数,歩道の幅などの道路データ、交差点や分岐などが更新日時やバージョンなどの更新履歴情報と共に記憶されている。そして、道路工事などにより地図画像データや道路データに変更が生じたり、交通量の変化や信号機の設置などにより道路時間データに変更が生じたりすると、変更された各データが情報センターから通信により送信され、これを通信装置58により受信してHDD40に書き込むことにより、各データの更新を行ない、更新日時やバージョンの更新も行なわれる。
【0022】
こうして構成された実施例のナビゲーションシステム20によって行なわれる処理、特に先行車両を追従するための追従案内処理について説明する。図2は、電子制御ユニット30によって実行される追従案内処理の一例を示すフローチャートである。この処理は、追従案内するための先行車両が設定されているときに繰り返し実行される。
【0023】
追従案内処理が実行されると、電子制御ユニット30のCPU32は、まず、通信装置58と先行車両の通信装置とによる通信により、先行車両の位置に関する先行車両位置情報と先行車両の動作に関する先行車両動作情報とからなる先行車両情報を取得する。ここで、先行車両位置情報としては、先行車両のナビゲーションシステムにより検出される先行車両の現在位置や走行道路、走行軌跡などの情報が含まれる。先行車両動作情報としては、先行車両を運転している運転者の操作、例えば、ハンドル操作や方向指示器の操作、アクセル操作、ブレーキ操作に関する情報や、先行車両の交差点での右左折や分岐点での分岐、先行車両の車線変更などの情報が含まれる。先行車両の交差点での右左折や分岐点での分岐、先行車両の車線変更は、先行車両の運転者によるハンドル操作と先行車両が走行している道路の情報により判断することができる。実施例では、先行車両動作情報として、方向指示器の操作、先行車両の交差点での右左折、先行車両の分岐点での分岐、先行車両の車線変更を用いるものとした。
【0024】
こうして先行車両情報を取得すると、先行車両と自車両との距離Lを計算し(ステップS110)、計算した距離Lが予め定めた閾値Lref以上であるか否かを判定する(ステップS120)。先行車両と自車両との距離Lは、先行車両の現在位置と先行車両の走行軌跡と自車両の現在位置とによって計算することができる。この計算は、例えば、先行車両の現在位置を目的地とみなすと共に走行軌跡を走行経路とみなして目的地までの距離を計算する際の手法を用いることができる。また、閾値Lrefは、自車両から先行車両の視認が困難になる程度の距離であり、例えば、200mや300m,400mなどを用いることができる。
【0025】
先行車両と自車両との距離Lが閾値Lref未満のときには、先行車両に交差点での右左折や分岐点での分岐による進路変更があったか否かを判定し(ステップS130)、先行車両に進路変更がなかったと判定されたときには、先行車両の動作に基づく追従案内(先行車両動作追従案内)を実行して(ステップS160)、本処理を終了する。先行車両動作追従案内は、図3に例示する先行車両動作追従案内処理によって行なわれる。この処理では、まず、先行車両の動作の案内を示す動作案内図がディスプレイ22に表示されている最中であるか否かを判定し(ステップS200)、動作案内図が表示されていないときには、動作案内図の基本情報を取得すると共に(ステップS210)、ディスプレイ22に動作案内図を表示する(ステップS220)。動作案内図の基本情報としては、走行路の車線数や先行車両が走行している車線,自車両が走行している車線などを挙げることができる。動作案内図をディスプレイ22に表示している様子の一例を図4に示す。実施例では、ディスプレイ22の左側半分には先行車両の現在位置と自車両の現在位置とを地図データと共に示し、右側半分に動作案合図を示すものとした。この動作案内図では、車線を用いて走行路を模式的に示し、走行路の上側で先行車両が走行している車線上に先行車両の図柄を示し、走行路の下側で自車両が走行している車線上に自車両の図柄を示している。ステップS200で動作案内図を表示中であると判定されたときや動作案内図を表示した後は、先行車両に動作があるか否かを判定し(ステップS230)、動作があるときには動作案内図に表示すると共に動作に応じたアナウンス内容をスピーカ26から音声出力することによって動作を報知して(ステップS240)、本処理を終了する。先行車両に動作があるか否かの判定は、先行車両動作情報(実施例では、方向指示器の操作、先行車両の右左折、先行車両の車線変更)によって行なうことができる。図4の動作案内図では、先行車両の運転者が方向指示器を右折側に操作したときの報知を車線3の矢印として示している。動作に応じたアナウンス内容としては、方向指示器の操作、先行車両の右左折、先行車両の車線変更に応じたもの、例えば、「右ウインカを指示しました。」や「左折しました。」、「右の車線に車線変更しました。」などを挙げることができる。ステップS230で先行車両の動作がないと判定されたときには、動作の報知を行なうことなく、本処理を終了する。このように、先行車両と自車両との距離Lが閾値Lref未満のときには先行車両の動作を示す動作案内図を用いて追従案内することにより、自車両の運転者は先行車両の動作に応じて的確に先行車両を追従する操作を行なうことができる。
【0026】
図2の追従案内処理のステップS120で先行車両と自車両との距離Lが閾値Lref以上であると判定されたときには、先行車両の位置に基づく追従案内(先行車両位置追従案内)を実行して(ステップS170)、本処理を終了する。先行車両位置追従案内は、図5に例示する先行車両位置追従案内処理によって行なわれる。この処理では、まず、先行車両の位置の案内を示す位置案内図がディスプレイ22に表示されている最中であるか否かを判定し(ステップS300)、位置案内図が表示されていないときには、位置案内図の基本情報を取得すると共に(ステップS310)、ディスプレイ22に位置案内図を表示して(ステップS320)、本処理を終了する。位置案内図の基本情報としては、先行車両の現在位置や走行軌跡,自車両の現在位置などを挙げることができる。位置案内図をディスプレイ22に表示している様子の一例を図6に示す。実施例では、先行車両の現在位置を目的地とみなすと共に先行車両の走行軌跡を走行経路として一般的な目的地までの走行経路を案内する手法と同様の手法を用いるものとした。目的地までの走行経路の案内との相違は、図6に示すように、目的地のマークに代えて先行車両のマークを用いている点である。このように、先行車両と自車両との距離Lが閾値Lref以上のときには先行車両の位置に基づく位置案内図を用いて追従案内することにより、先行車両を視認できなくても先行車両を追従することができる。特に、実施例では、目的地までの走行経路の案内と同様の手法により追従案内するから、自車両の運転者は使い慣れた案内手法によって追従案内することができる。
【0027】
図2の追従案内処理のステップS130で先行車両に進路変更があったと判定されたときには、自車両が進路変更のポイント(交差点や分岐点)まで到達するのに要する時間(到達時間)Tを計算し(ステップS140)、計算した到達時間Tが予め定めた閾値Tref以上であるか否かを判定し(ステップS150)、到達時間Tが閾値Tref未満のときには、先行車両動作追従案内を実行して(ステップS160)、本処理を終了し、到達時間Tが閾値Tref以上のときには、先行車両と自車両との距離Lが閾値Lref未満ではあるが先行車両位置追従案内を実行して(ステップS170)、本処理を終了する。ここで、先行車両に進路変更があったか否かの判定は、先行車両動作情報によって行なうことができる。到達時間Tは、例えば、進路変更のポイントを目的地としたときの目的地までの推定所要時間として計算したり、自車両の現在位置と進路変更のポイントとの距離を車速で除して係数を乗じることによって計算したりすることができる。閾値Trefは、先行車両位置追従案内により案内するのに十分な時間として定めることができ、例えば、5秒や10秒,15秒などを用いることができる。このように、進路変更のポイントまでの到達時間Tが閾値Tref以上のときには、先行車両と自車両との距離Lが閾値Lref未満であっても先行車両位置追従案内により追従案内することにより、先行車両の追従のための進路変更をより確実に行なうことができる。しかも、実施例では、先行車両位置追従案内は目的地までの走行経路の案内と同様の手法によるものとしているから、目的地までの走行経路の案内において交差点や分岐点で進路変更する場合に拡大図の表示とアナウンスが行なわれるものとすれば、先行車両位置追従案内においても同様に拡大図の表示とアナウンスが行なわれる。このため、自車両の運転者は、使い慣れた拡大図とアナウンスとによる案内を受けることになるから、より確実に先行車両の追従のための進路変更を行なうことができる。
【0028】
以上説明した実施例のナビゲーションシステム20によれば、先行車両と自車両との距離Lが予め定めた閾値Lref未満のときには、主として先行車両動作追従案内により追従案内を行ない、先行車両と自車両との距離Lが閾値Lref以上のときには、目的地までの走行経路の案内と同様の手法の先行車両位置追従案内により追従案内を行なうから、先行車両と自車両との距離Lが閾値Lref未満での先行車両を視認できる程度のときには先行車両の動作を迅速に確認しながら容易に先行車両を追従することができ、先行車両と自車両との距離Lが閾値Lref以上で先行車両を視認できないときでも使い慣れた案内により先行車両をより的確に追従することができる。しかも、進路変更のポイントまでの到達時間Tが閾値Tref以上のときには、先行車両と自車両との距離Lが閾値Lref未満であっても先行車両位置追従案内により追従案内を行なうから、使い慣れた案内により先行車両の進路変更に対して確実に進路変更して先行車両を追従することができる。さらに、目的地までの走行経路の案内において交差点や分岐点で進路変更する場合に拡大図の表示とアナウンスが行なわれるものとすれば、使い慣れた拡大図とアナウンスとによる案内により、より確実に先行車両の追従を行なうことができ、先行車両の追従を容易なものとすることができる。
【0029】
実施例のナビゲーションシステム20では、動作案内図として、車線を用いて走行路を模式的に示し、走行路の上側の先行車両が走行している車線上に先行車両の図柄を示し、走行路の下側に自車両が走行している車線上に自車両の図柄を示すものとしたが、動作案内図を、先行車両が走行している走行路と先行車両とを示す先行車両図と、自車両が走行している走行路と自車両とを示す自車両図とによって構成するものとしてもよい。この場合、先行車両の車両前方が自車両の向きに対して相対的に向いている先行車両図を用いるものとしてもよい。この変形例の動作案内図の一例を図8に示す。図8の動作案内図(図中、右側の図)では、上側に先行車両図が示されており、下側に自車両図が示されており、中央に先行車両と自車両との間に存在する信号機の数と先行車両と自車両との距離Lとが示されている。なお、この変形例では、中央に先行車両と自車両との間に存在する信号機の数と先行車両と自車両との距離Lとを示すものとしたが、この他に先行車両と自車両との間に存在する交差点の数を示すものとしてもよいし、先行車両と自車両との間に存在する信号機の数や先行車両と自車両との距離L,先行車両と自車両との間に存在する交差点の数のいずれか一つのみを示すものとしたり、いずれも示さないものとしても構わない。
【0030】
実施例のナビゲーションシステム20では、先行車両動作追従案内による追従案内では、ディスプレイ22の左側半分には先行車両の現在位置と自車両の現在位置とを地図データと共に示し、右側半分に動作案合図を示すものとしたが、ディスプレイ22の全面に動作案内図のみを表示するものとしても構わない。
【0031】
実施例のナビゲーションシステム20では、先行車両位置追従案内による追従案内では、目的地までの走行経路の案内と同様の手法により追従案内するものとしたが、先行車両の位置に基づいて追従案内するものであればよいから、目的地までの走行経路の案内と異なる手法により追従案内するものとしても構わない。
【0032】
実施例のナビゲーションシステム20では、先行車両情報は先行車両との通信により取得するものとしたが、先行車両が情報センターとの通信により先行車両情報を情報センターに送信し、情報センターが先行車両から取得した先行車両情報を情報センターと自車両との通信により自車両が取得するものとしてもよい。
【0033】
実施例のナビゲーションシステム20では、先行車両自身が、先行車両の交差点での右左折や分岐点での分岐などの進路変更を、運転者の操作や車両の挙動に基づいて判断し、その判断結果を先行車両動作情報として取得するものとしたが、先行車両動作情報として、先行車両の運転者の操作や車両の挙動を取得し、当該取得した情報に基づいて、自車両で先行車両の進路変更を判断するものとしてもよい。
【0034】
実施例のナビゲーションシステム20では、先行車両動作情報として、方向指示器の操作、先行車両の交差点での右左折、先行車両の分岐点での分岐、先行車両の車線変更を用いるものとしたが、これに加えて、ハンドル操作やアクセル操作、ブレーキ操作を用いるものとしてもよい。この場合、動作案内図にハンドル操作やアクセル操作,ブレーキ操作を表示したり、ハンドル操作やアクセル操作,ブレーキ操作に対応するアナウンス内容、例えば、「ハンドルを右に切りました。」や「加速しています。」、「ブレーキペダルを踏みました。」などのアナウンス内容をスピーカ26から音声出力するものとしてもよい。
【0035】
実施例では、本発明をナビゲーションシステムとして説明したが、ナビゲーション方法の形態としてもよいし、ナビゲーションシステムを構築するためのプログラムの形態としてもよい。
【0036】
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
【産業上の利用可能性】
【0037】
本発明は、ナビゲーションシステムの製造産業などに利用可能である。
【符号の説明】
【0038】
20 ナビゲーションシステム、22 ディスプレイ、24 タッチパネル、26 スピーカ、30 電子制御ユニット、32 CPU、34 ROM、36 RAM、38 フラッシュメモリ、40 ハードディスクドライブ(HDD)、50 GPS受信機、52 方位センサ、54 追従案内処理部、58 通信装置、60 車両用電子制御ユニット、62 車速センサ、64 操舵角センサ、66 方向指示器。
【特許請求の範囲】
【請求項1】
先行車両を追従するための追従案内を行なうナビゲーションシステムであって、
前記先行車両の位置に関する先行車両位置情報と前記先行車両の動作に関する先行車両動作情報とを取得する先行車両走行情報取得手段と、
前記先行車両と自車両との距離が所定距離未満であるか否かを判定する距離判定手段と、
前記距離判定手段により前記先行車両と前記自車両との距離が前記所定距離未満であると判定されたときには、前記先行車両動作情報に基づいて前記先行車両の動作を案内する第1案内手法により前記追従案内を行ない、前記距離判定手段により前記先行車両と前記自車両との距離が前記所定距離以上であると判定されたときには、前記先行車両位置情報に基づいて前記自車両の位置から前記先行車両の位置までの経路を案内する第2案内手法により前記追従案内を行なう案内手段と、
を備えることを特徴とするナビゲーションシステム。
【請求項2】
請求項1記載のナビゲーションシステムであって、
前記自車両の目的地までの経路を取得する経路取得手段を更に備え、
前記案内手段は、前記目的地までの前記経路を案内する経路案内を行なうとともに、当該経路案内と同じ案内態様にて前記第2案内手法による前記追従案内を行なう手段である、
ことを特徴とするナビゲーションシステム。
【請求項3】
請求項1または2記載のナビゲーションシステムであって、
前記先行車両位置情報に基づいて、前記自車両前方の分岐点にて前記先行車両が進路変更したか否かを判定する分岐判定手段と、
前記分岐判定手段により前記自車両前方の分岐点にて前記先行車両が進路変更したと判定された場合、前記自車両の位置から当該分岐点に至るまでに要する到達時間が所定時間以上であるか否かを判定する時間判定手段と、を更に備え、
前記案内手段は、前記時間判定手段により前記到達時間が前記所定時間以上であると判定されたときには、前記距離判定手段により前記先行車両と前記自車両との距離が前記所定距離未満であると判定された場合であっても、前記第2案内手法により前記追従案内を行なう手段である、
ことを特徴とするナビゲーションシステム。
【請求項4】
請求項1ないし3のうちのいずれか一つの請求項に記載のナビゲーションシステムであって、
前記第1案内手法は、前記先行車両動作情報に基づいて、方向指示器の操作情報と前記先行車両が走行している車線の情報とを表示することにより案内する手法である、
ことを特徴とするナビゲーションシステム。
【請求項5】
請求項4記載のナビゲーションシステムであって、
前記第1案内手法は、前記先行車両と前記自車両との距離,前記先行車両から前記自車両までの走行路における交差点の数,前記先行車両から前記自車両までの走行路における信号機の数のいずれかを表示して案内する手法である、
ことを特徴とするナビゲーションシステム。
【請求項6】
先行車両を追従するための追従案内を行なうナビゲーション方法であって、
前記先行車両の位置に関する先行車両位置情報と前記先行車両の動作に関する先行車両動作情報とを取得し、
前記先行車両と自車両との距離が所定距離未満であるときには、前記先行車両動作情報に基づいて前記先行車両の動作を案内する第1案内手法により前記追従案内を行ない、前記先行車両と前記自車両との距離が前記所定距離以上であるときには、前記先行車両位置情報に基づいて前記自車両の位置から前記先行車両の位置までの経路を案内する第2案内手法により前記追従案内を行なう、
ことを特徴とするナビゲーション方法。
【請求項7】
先行車両を追従するための追従案内を行なうナビゲーションシステムに用いられるプログラムであって、
前記先行車両と自車両との距離が所定距離未満であるときには、前記先行車両の動作に関する先行車両動作情報に基づいて前記先行車両の動作を案内する第1案内手法により前記追従案内を行なう第1モジュールと、
前記先行車両と前記自車両との距離が前記所定距離以上であるときには、前記先行車両の位置に関する先行車両位置情報に基づいて前記自車両の位置から前記先行車両の位置までの経路を案内する第2案内手法により前記追従案内を行なう第2モジュールと、
を備えるプログラム。
【請求項1】
先行車両を追従するための追従案内を行なうナビゲーションシステムであって、
前記先行車両の位置に関する先行車両位置情報と前記先行車両の動作に関する先行車両動作情報とを取得する先行車両走行情報取得手段と、
前記先行車両と自車両との距離が所定距離未満であるか否かを判定する距離判定手段と、
前記距離判定手段により前記先行車両と前記自車両との距離が前記所定距離未満であると判定されたときには、前記先行車両動作情報に基づいて前記先行車両の動作を案内する第1案内手法により前記追従案内を行ない、前記距離判定手段により前記先行車両と前記自車両との距離が前記所定距離以上であると判定されたときには、前記先行車両位置情報に基づいて前記自車両の位置から前記先行車両の位置までの経路を案内する第2案内手法により前記追従案内を行なう案内手段と、
を備えることを特徴とするナビゲーションシステム。
【請求項2】
請求項1記載のナビゲーションシステムであって、
前記自車両の目的地までの経路を取得する経路取得手段を更に備え、
前記案内手段は、前記目的地までの前記経路を案内する経路案内を行なうとともに、当該経路案内と同じ案内態様にて前記第2案内手法による前記追従案内を行なう手段である、
ことを特徴とするナビゲーションシステム。
【請求項3】
請求項1または2記載のナビゲーションシステムであって、
前記先行車両位置情報に基づいて、前記自車両前方の分岐点にて前記先行車両が進路変更したか否かを判定する分岐判定手段と、
前記分岐判定手段により前記自車両前方の分岐点にて前記先行車両が進路変更したと判定された場合、前記自車両の位置から当該分岐点に至るまでに要する到達時間が所定時間以上であるか否かを判定する時間判定手段と、を更に備え、
前記案内手段は、前記時間判定手段により前記到達時間が前記所定時間以上であると判定されたときには、前記距離判定手段により前記先行車両と前記自車両との距離が前記所定距離未満であると判定された場合であっても、前記第2案内手法により前記追従案内を行なう手段である、
ことを特徴とするナビゲーションシステム。
【請求項4】
請求項1ないし3のうちのいずれか一つの請求項に記載のナビゲーションシステムであって、
前記第1案内手法は、前記先行車両動作情報に基づいて、方向指示器の操作情報と前記先行車両が走行している車線の情報とを表示することにより案内する手法である、
ことを特徴とするナビゲーションシステム。
【請求項5】
請求項4記載のナビゲーションシステムであって、
前記第1案内手法は、前記先行車両と前記自車両との距離,前記先行車両から前記自車両までの走行路における交差点の数,前記先行車両から前記自車両までの走行路における信号機の数のいずれかを表示して案内する手法である、
ことを特徴とするナビゲーションシステム。
【請求項6】
先行車両を追従するための追従案内を行なうナビゲーション方法であって、
前記先行車両の位置に関する先行車両位置情報と前記先行車両の動作に関する先行車両動作情報とを取得し、
前記先行車両と自車両との距離が所定距離未満であるときには、前記先行車両動作情報に基づいて前記先行車両の動作を案内する第1案内手法により前記追従案内を行ない、前記先行車両と前記自車両との距離が前記所定距離以上であるときには、前記先行車両位置情報に基づいて前記自車両の位置から前記先行車両の位置までの経路を案内する第2案内手法により前記追従案内を行なう、
ことを特徴とするナビゲーション方法。
【請求項7】
先行車両を追従するための追従案内を行なうナビゲーションシステムに用いられるプログラムであって、
前記先行車両と自車両との距離が所定距離未満であるときには、前記先行車両の動作に関する先行車両動作情報に基づいて前記先行車両の動作を案内する第1案内手法により前記追従案内を行なう第1モジュールと、
前記先行車両と前記自車両との距離が前記所定距離以上であるときには、前記先行車両の位置に関する先行車両位置情報に基づいて前記自車両の位置から前記先行車両の位置までの経路を案内する第2案内手法により前記追従案内を行なう第2モジュールと、
を備えるプログラム。
【図1】


【図2】
【図3】
【図5】
【図4】
【図6】
【図7】
【図8】
【図2】
【図3】
【図5】
【図4】
【図6】
【図7】
【図8】
【公開番号】特開2013−113673(P2013−113673A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−259160(P2011−259160)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]