
ナビゲーションシステムの予想性能の決定
一態様では、ナビゲーション補強システムの予測性能を決定する方法は、ナビゲーション補強システムの標準性能を決定すること、及び標準性能を決定することに基づいてナビゲーション補強システムの予測性能を決定することを含む。別の態様では、ナビゲーション補強システムの予測性能を決定するシステムは、ナビゲーション補強システムの標準性能を決定する長期モニタ及びナビゲーション補強システムの標準性能に基づいてナビゲーション補強システムの予測性能を決定する短期モニタを備える。

【発明の詳細な説明】
【技術分野】
【0001】
本発明はナビゲーションシステムに関し、特にナビゲーション衛星システムに関する。
【背景技術】
【0002】
全地球航法衛星システム(GNSS:Global Navigation Satellite System)は測距信号及び他の信号を送信し、陸海空のユーザがこれらの信号を使用して、三次元位置、速度、及び日時を決定する。GNSSは、信号をユーザに送信するための衛星ネットワークを含む。GNSSの一例は全地球測位システム(GPS)である。GPSは、中高度軌道で動作する24基以上の衛星のネットワークを含み、これらはGPS衛星と呼ばれる。
【0003】
GNSSユーザが決定する位置解は、衛星エフェメリスデータ誤差、衛星クロックドリフト、電離層遅延、対流圏遅延、マルチパス信号、及び受信機ノイズ等の要因により或る程度の不正確性を有する。位置解の不正確性の程度を決定(判定)するために、GNSSユーザは、位置解で発生し得る最大距離誤差の高精度限界である完全性(インテグリティ:integrity)限界を計算することができる。インテグリティ限界は、GNSSユーザによって決定された位置解の不確実性量を制限する。GNSSユーザの位置解誤差がインテグリティ限界を超える確率は極めて小さいため、ユーザに対して、実際の位置がGNSSを使用して決定された位置解からインテグリティ限界距離内にあることがほぼ保証される。一般に、インテグリティの高いナビゲーションシステムほど、ユーザはより小さいインテグリティ限界を計算することができ(発生し得る誤差をより厳密に制限する)、ひいてはユーザの決定した位置の不正確性を低減することができる。GNSSそれ自体によって提供されるインテグリティレベルは、ユーザが、航空機ナビゲーション等のいくつかの用途の要件を満たすのに十分に小さなインテグリティ限界を決定するには不十分な場合がある。
【0004】
オーグメンテーション(補強)システムと呼ばれる他のシステムは、補正データ及びインテグリティデータを生成し、これらデータをユーザに報知する。ユーザは補強システムからのデータを利用して、GNSSから受信したデータを補足し、位置解の精度及びインテグリティを上げる。補強システムによって生成される補正データは、上述した要因等の要因によって生じる誤差のいくらかを補償する調整である。位置解の精度を上げるよう、ユーザは補正データを利用する。インテグリティデータは、補正データを適用した後でもなお残り得る残存誤差を制限する値を含む。ユーザはインテグリティデータを利用して、位置解に残存する可能性のある不正確性の程度を減じるより厳密なインテグリティ限界を決定する。
【0005】
GPSと併せて使用される典型的な補強システムは、GPS衛星からGPSデータを受信するGPS受信機を有する1つ又は複数の基準ステーションを含む。基準ステーション受信機の正確な位置は判明している。マスタ制御ステーションが、基準ステーションによって収集されたGPSデータを受信し、各GPS衛星について、基準ステーション受信機の既知の位置に基づく衛星の予想限界と、GPSデータを使用して決定される衛星の観測限界との間のバイアスを決定する。マスタ制御ステーションはまた、GPS衛星の性能を監視して異常をユーザに報告し、それによってGPSユーザにより高いインテグリティを提供する。マスタ制御ステーションは、ユーザに報知される補正データ及びインテグリティデータを生成する。
【0006】
既知の一種の補強システムは、衛星型補強(オーグメンテーション)システム(SBAS:satellite-based augmentation system)である。典型的なSBASは、SBASがサービス提供する広い地理的領域全域にわたる位置に、GPS受信機を有する1組の基準ステーションを含む。SBASマスタ制御ステーションによって生成される補正データ及びインテグリティデータは、1つ又は複数の対地球同期軌道(GEO)衛星に送信されて、GPS衛星と同じ周波数でGPS衛星と同様のフォーマットで広域全域にわたるユーザに報知される。この方法では、ユーザのGPS受信機がSBAS GEO衛星及びGPS衛星の両方からの信号を受信することができ、SBAS GEO衛星を追加の測位源として提供して可用性(アベイラビリティ)を向上させるというさらなる利点がある。SBASサービスエリアはSBAS GEO衛星のフットプリント(経度及び緯度でおよそ+/−76度に広がる)並びにサービスエリア全域に分散するSBAS基準ステーションの数量及び位置によって制限されるため、単一のSBASがユーザにサービスを提供できるのは、一国全域又は大陸全域であり得る。
【0007】
別の既知の種類の補強システムは地上型補強(オーグメンテーション)システム(GBAS:ground-based augmentation system)である。典型的なGBASは、GBASによってサービス提供されるローカルエリア(たとえば、半径20マイル又は半径30マイル)内に配置されるGPS受信機を有する1組の基準ステーションを含む。GBASマスタ制御ステーションは補正データ及びインテグリティデータを生成し、これらのデータはVHFデータリンクを介してGBASのすぐ近くのユーザに報知される。GBASサービスエリアはVHF送信機のカバレージエリア及び基準ステーションの局在的な分布によって制限されるため、単一のGBASを使用できるのは、空港周辺等のローカルエリア内のみであり得る。単一のGBASは、ローカルエリア内でのみ動作するため、そのエリアに対してより正確な補正データ及びより厳密な限界のインテグリティデータを提供することができ、同エリアにサービスを提供するSBASよりも速く障害状況をユーザに警告することができる。
【0008】
さらなる既知の種類の補強システムであって、固定位置にある基準ステーションを使用しない補強システムは、上空型補強(オーグメンテーション)システム(ABAS:air-based augmentation system)である。ABASは通常、ユーザ自身のGPS受信機のみを使用して、GPS衛星からGPSデータを受信し、GPSデータを、慣性航法装置(INS)等の他の機器からのデータで補足することもできる。ABASは、受信機自律型インテグリティ監視(RAIM:Receiver Autonomous Integrity Monitoring)法を使用してインテグリティ監視を行う。RAIMは、種々の組み合わせのGPS衛星を使用して達成された結果の比較に基づくため、ABASは、基本的な位置特定に決定される最小で4つのGPS衛星よりも多くのGPS衛星を視野内に必要とする。したがって、ABASは可用性が低減する可能性があることを代償としてインテグリティを獲得する。
【0009】
航空機ナビゲーション用にGNSSを使用する許可は政府及び国際組織によって認可され、こうした組織は、種々の種類の航空機ナビゲーション(たとえば、種々の飛行行程)に使用することができる種々のGNSSナビゲーションサービスに対する要件を規定している。GNSSナビゲーションサービスによってはGNSS単独でサポートされるものもあれば、SBAS又はGBAS等の補強システムで補足されたGNSSによってサポートされるものもある。各種のGNSSナビゲーションサービスの要件により、その種類のナビゲーションサービスを使用したときに許容できるユーザ位置解の最大誤差を制限するインテグリティ限界の限界閾値が指定される。インテグリティ限界が、ナビゲーションサービスについて規定された閾値限度以下であるとユーザが判断できる場合に、ユーザはそのナビゲーションサービスを利用することができる(すなわち、使用が認可される)。たとえば、カテゴリ1の航空機着陸のGNSSナビゲーションサービスの要件は、ユーザの水平位置解のインテグリティ限界が40m以下であり、且つユーザの垂直位置解のインテグリティ限界が10m以下であることを指定している。
【0010】
ユーザによって判断されるインテグリティ限界の大きさは、ユーザに対するGNSS衛星の位置、その時点でのGNSS及び補強システム(該当する場合)の性能、及び環境条件(たとえば、対流圏及び電離層)を含むいくつかの要因に依存する。これら要因は通常、経時変化するとともにユーザの位置によって変化する。ユーザが同じ位置に留まる場合であっても、その時々で、同ユーザが判断するインテグリティ限界が変化することが典型的である。同じ時点であっても、異なる場所にいるユーザが判断するインテグリティ限界が異なることも典型的である。随時、GNSSナビゲーションサービスは、或る場所(インテグリティ限界が要求される閾値内である)にいるユーザに提供することができるが、他の場所(インテグリティ限界が要求される閾値を超える)にいるユーザには提供することができない。
【発明の開示】
【課題を解決するための手段】
【0011】
一態様では、ナビゲーション補強(オーグメンテーション)システムの予測性能を決定(判定)する方法は、ナビゲーション補強システムの標準性能を決定し、標準性能の決定に基づいて、ナビゲーション補強システムの予測性能を決定することを含む。
【0012】
別の態様では、ナビゲーション補強システムの予測性能を決定するシステムは、ナビゲーション補強システムの標準性能を決定する長期モニタと、ナビゲーション補強システムの標準性能に基づいてナビゲーション補強システムの予測性能を決定する短期モニタとを備える。
【0013】
さらなる態様では、本発明は、ナビゲーション補強システムの予測性能を決定するための実行可能な命令を記憶した機械可読媒体を含む物品である。この命令は機械に、ナビゲーション補強の標準性能を決定し、標準性能の決定に基づいて、第2の時間間隔中のナビゲーション補強システムの予測性能を決定することを実行させる。
【発明を実施するための最良の形態】
【0014】
ナビゲーションシステム及びナビゲーション補強システムの将来の性能の程度を予測する能力が有用である。これは、ナビゲーションシステムの性能予測が、いつどこでナビゲーションサービスがユーザに提供されるか、又はされないかを指定するナビゲーションサービス予測予報を生成するために使用されることがあるためである。次回のナビゲーションサービス停止の警告を使用して、進行中の航行をナビゲーションサービスに頼っているユーザにナビゲーションサービスの提供が不能になったときに破滅的且つ安全でない可能性のある状況を回避することができる。ナビゲーションサービス予測予報によって、ユーザは、サービスが利用できなくなるときにその場所でナビゲーションサービスを使用しないように事前にナビゲーションプランを調整することができるようになる。
【0015】
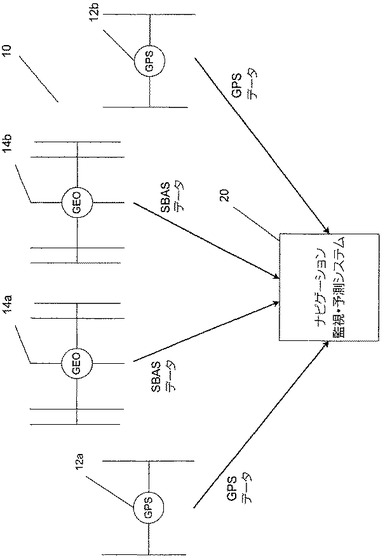
図1を参照すると、全地球測位システム(GPS)及び衛星型補強(オーグメンテーション)システム(SBAS)を有するナビゲーション環境10は、GPS衛星(たとえば、GPS衛星12a及びGPS衛星12b)並びに1つ又は複数のSBAS型補強システム用の静止(GEO)衛星(たとえば、GEO衛星14a及びGEO衛星14b)を含む。SBAS補強GPSのユーザは、視野内(すなわち、見通し線内)にあるGPS衛星12a及び12bによって報知されるGPSデータ並びに視野内にあるSBAS GEO衛星14a及び14bによって報知されるSBASデータを受信して処理する。ナビゲーション監視・予測システム20が、GPS及びSBASの性能の監視及び予測に使用される。ナビゲーション監視・予測システム20は、GPS衛星12a及び12b並びにSBAS GEO衛星14a及び14bによってユーザに報知されるものと同じGPSデータ及びSBASデータを処理する。ナビゲーション監視・予測システム20は、GPSデータ及びSBASデータを使用して、現在のGPS及びSBASの性能を判断するとともに、GPS及びSBASのナビゲーションサービスが現在利用可能な場所を判断する。ナビゲーション監視・予測システム20はまた、GPSデータ及びSBASデータを使用して、将来のGPS及びSBASの性能を予測するとともに、将来にいつどこでGPS及びSBASナビゲーションサービスが利用できるようになるかを予測する。
【0016】
ナビゲーション監視・予測システム20は、単一のデータソースから受信する、GPS衛星12a及び12bによって報知されるGPSデータ及びSBAS GEO衛星14a及び14bによって報知されるSBASデータを使用して、SBAS GEO衛星によってカバーされる広範な地理的サービスエリア全域にわたる場所でのGPSナビゲーションサービス及びSBASナビゲーションサービスの現在及び予測される将来の可用性(アベイラビリティ)を判断する。
【0017】
本明細書において述べるナビゲーション監視・予測システム20はSBASとの併用向きであるが、ナビゲーション監視・予測システム20は他の種類の補強システムと併用することも可能である。本明細書において述べるナビゲーション監視・予測システム20はGPSとの併用向きであるが、ナビゲーション監視・予測システム20は他の種類又は複数の種類のGNSSと併用することも可能である。
【0018】
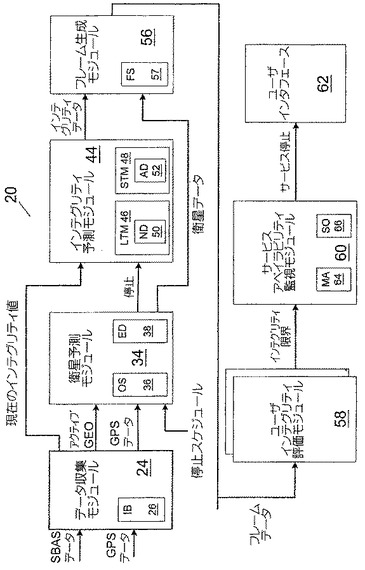
図2を参照すると、ナビゲーション監視・予測システム20は、データ収集モジュール24、衛星予測モジュール34、インテグリティ予測モジュール44、フレーム生成モジュール56、ユーザインテグリティ評価モジュール58、サービスアベイラビリティ(可用性)監視モジュール60、及びユーザインタフェース62を含む。ナビゲーション監視・予測システム20は、予測時間窓(たとえば、現在時刻から将来の72時間)にわたる時々でのGPS及びSBASの予測性能並びにGPSナビゲーションサービス及びSBASナビゲーションサービスの予測可用性を生成する。予測時間窓は等長(たとえば、1分)の予測時間フレームに分けられる。ナビゲーション監視・予測システム20は、予測時間窓内の各予測時間フレームに対して予測を生成する。
【0019】
データ収集モジュール24は、GPSデータ及びSBASデータをソース(たとえば、SBAS対応GPS受信機)から受信する。GPSデータは、各GPS衛星のエフェメリスデータ(すなわち、軌道パラメータ)及び健康状態データを含み、衛星予測モジュール34にルーティングされる。SBASデータは、各SBAS GEO衛星によって報知され、各GPS衛星及びSBAS GEO衛星のユーザディファレンシャル(微分)レンジ誤差指数(UDREI:user differential range error indicator)データ及びクロックエフェメリス共分散マトリックス(MT28)データで構成されるインテグリティデータ並びに各SBAS GEO衛星のIGPマスク内の各電離層格子点(IGP)の格子点電離層垂直遅延量誤差指数(GIVEI)データを含む。データ収集モジュール24はSBASデータ入力バッファ(IB)26を含み、ここに各SBAS GEO衛星からのSBASデータが記憶される。各SBAS GEO衛星からのデータは、SBASデータ入力バッファ26において別個に処理されて記憶される。SBASデータ入力バッファ26は、現在時刻前の或る時間(たとえば、10分)から現在時刻後の或る時間(たとえば、10分)にわたる収集時間間隔中、データを保持する。各SBASデータ値は、その種類のデータに適した妥当な時間間隔にわたってSBASデータ入力バッファ26に記憶される。新しいSBASデータ値を予想報告間隔以内にSBAS GEO衛星から受信しない場合に、SBASデータ入力バッファ26に記憶されているデータ値の劣化が起こる。周期的に、各インテグリティ監視間隔(たとえば、1分)の終わりに、データ収集モジュール24は、SBASデータ入力バッファ26に収集したデータを処理する。データ収集モジュール24は、インテグリティ監視間隔中の各GPS衛星及びSBAS GEO衛星について収集された一連のUDREI値及びMT28値、並びに各IGPについて収集された一連のGIVEI値を調べ、各一連の値をそのインテグリティ監視間隔の単一の代表的なUDREI値、MT28値、又はGIVEI値にまとめる。そのインテグリティ監視間隔中の代表的なUDREI値、MT28値、及びGIVEI値で構成される現在のインテグリティ値が、インテグリティ予測モジュール44にルーティングされる。
【0020】
データ収集モジュール24は、データの送信元のSBAS GEO衛星を特定するアクティブGEOデータを、SBAS GEO衛星の動作状態を監視する衛星予測モジュール34に提供する。
【0021】
衛星予測モジュール34は、GPS衛星及びSBAS GEO衛星の性能を監視し、予測時間窓にわたるGPS衛星及びSBAS GEO衛星の性能の予測を生成する。衛星予測モジュール34は、衛星停止スケジュール(OS:outage schedule)データベース36及びエフェメリスデータベース(ED)38を含む。衛星停止スケジュールデータベース36は、各GPS衛星及びSBAS GEO衛星に1組の時間間隔を含み、この時間間隔は、衛星が動作可能でなくなる将来の時間を示す。エフェメリスデータベース38は、各GPS衛星から受信した最新のエフェメリスデータを含む。
【0022】
衛星予測モジュール34は、衛星停止スケジュールデータベース36からのデータを使用して、各GPS衛星及びSBAS GEO衛星が、予測時間窓内の各予測時間フレーム中に動作可能であるか否かを予測する。衛星予測モジュール34は、更新された衛星停止スケジュール情報を受信すると、その更新された情報を衛星停止スケジュールデータベース36に記憶し、通知をフレーム生成モジュール56に送信して、更新された停止スケジュールによって影響を受ける予測時間窓内のすべての予測時間フレームに対するインテグリティ予測結果を再評価する。衛星停止スケジュールへの更新は、ユーザによって直接入力されてもよく、ユーザインタフェースによって提供される機能を通して入力されてもよく、又は次回の衛星停止についての情報を提供するサービスへの接続又はそのサービスからの電子メールから自動的に得てもよい。
【0023】
衛星予測モジュール34は、到来するGPSデータ及びアクティブGEOデータを監視し、GPS衛星及びSBAS GEO衛星の実際の動作状態と、衛星停止スケジュールデータベース36内の情報によって示されるこれらの衛星の予想される動作状態との不一致を検出する。スケジュール外のGPS衛星又はSBAS GEO衛星の停止が検出される場合、衛星予測モジュール34は、不正確な停止スケジュールをオーバーライドする更新された衛星動作予測を生成し、利用できない衛星が予測評価から除外されるように、通知をフレーム生成モジュール56に送信して、影響を受けるすべての予測時間フレームに対するインテグリティ予測結果を再評価する。同様に、GPS衛星又はSBAS GEO衛星が、停止するとスケジュールされているときに動作可能であることが分かった場合も、衛星予測モジュール34は、停止スケジュールをオーバーライドする更新された衛星動作予測を生成し、動作可能な衛星が予測評価に含められるように、通知をフレーム生成モジュール56に送信する。
【0024】
衛星予測モジュール34は、エフェメリスデータベース38からのデータを使用して、予測時間窓内の各予測時間フレーム中の各GPS衛星及びSBAS GEO衛星の位置を予測する。衛星予測モジュール34は、更新された衛星エフェメリスデータを受信すると、そのデータをエフェメリスデータベース38に記憶し、通知をフレーム生成モジュール56に送信して、更新されたエフェメリスによって影響を受ける予測時間窓内のすべての予測時間フレームに対するインテグリティ予測結果を再評価する。
【0025】
衛星予測モジュール34は、新しいGPS衛星についての到来するGPSデータを監視する。新しいGPS衛星が検出された場合、そのGPS衛星は衛星停止スケジュールデータベース36及びエフェメリスデータベース38に加えられる。衛星予測モジュール34はまた、タイムアウト(時間切れ期間、たとえば、24時間)中にGPS衛星からデータを受信しなかった場合にその衛星を時間切れとする。時間切れした衛星は、衛星停止スケジュールデータベース36及びエフェメリスデータベース38から除外される。GPS衛星が追加又は削除されるとき、通知がフレーム生成モジュール56に送信されて、予測期間全体にわたるすべての予測時間フレームに対するインテグリティ予測結果が再評価される。
【0026】
インテグリティ予測モジュール44は、SBAS GEO衛星からのインテグリティデータを監視し、SBAS GEO衛星が予測時間窓中にユーザに向けて報知するインテグリティデータ予測を生成する。インテグリティデータは、各GPS衛星及びSBAS GEO衛星のユーザディファレンシャルレンジ誤差指数(UDREI)データ及びクロックエフェメリス共分散マトリックス(MT28)データ、並びに各SBAS GEO衛星のIGPマスク内の各電離層格子点(IGP)についての格子点電離層垂直遅延量誤差指数(GIVEI)データを含む。インテグリティ予測モジュール44は長期モニタ46を含み、短期モニタ48を含むこともできる。
【0027】
長期モニタ46は、各SBAS GEO衛星の全組の標準インテグリティデータ値(各GPS衛星及びSBAS GEO衛星のUDREI値及びMT28値、並びに各IGPのGIVEI値)を含むノミナルデータベース(ND:nominal database)50を生成する。長期モニタ46は、SBAS GEO衛星がそれまでに生成したインテグリティデータを監視することによって各SBAS GEO衛星の標準インテグリティデータ値を導出する。ノミナルデータベース50内のデータは、最近まででSBAS GEO衛星によって最も一貫して生成されたインテグリティデータ値である。近い将来の状況が最近の状況と同様である場合、SBAS GEO衛星が、過去に一貫して生成していたものと同じインテグリティデータ値を将来でも一貫して生成し続ける可能性が高い。近い将来の状況が標準である(すなわち、最近一貫して発生した状況に類似する)と予想される場合、過去のSBAS性能に基づくノミナルデータベース50内の同じ標準インテグリティデータ値を、将来のSBAS性能を予測する値として使用することができる。
【0028】
ノミナルデータベース50は、24時間にわずかに満たない全恒星日にわたる各インテグリティ監視間隔のインテグリティデータ値を含む。ノミナルデータベース50は、恒星日内の各インテグリティ監視間隔中(たとえば、1分)の各SBAS GEO衛星の各種類のインテグリティデータの値を含む。GPS衛星の軌道周期は恒星日の半分であるため、GPS衛星は、各恒星日内の同じ時間オフセットで地球に対してほぼ同じ位置にある。SBAS基準ステーションに対して同じ状況のGPS衛星位置が、各恒星日のその同じ間隔中に再び発生するため、SBASは、後続の恒星日にわたって同じインテグリティ監視間隔中に同様のインテグリティ値を生成する可能性が高い。
【0029】
長期モニタ46は、SBAS GEO衛星によって生成されるインテグリティデータを常時監視し、必要に応じてノミナルデータベース50を更新して、データベース内の標準インテグリティデータをSBASの実際の過去の性能と一貫した状態に保つ。ノミナルデータベース50は、SBAS GEO衛星が将来に生成する可能性の高いインテグリティデータ値を含むため、長期モニタは、過去のSBAS性能での再現性のある傾向と一時的な逸脱(偏倚)とを区別する。一時的な偏倚中にSBAS GEO衛星によって過去に生成された値は、将来に再び発生する可能性は低いが、SBAS GEO衛星によって過去に一貫して生成されていた値は、将来に再び生成される可能性が高い。ノミナルデータベース50が更新されるときは常に、長期モニタ46は、通知をフレーム生成モジュール56に送信して、影響を受けるすべての予測時間フレームに対するインテグリティ予測結果を再評価する。
【0030】
短期モニタ48は調整を受けた予測を生成し、調整予測データベース(AD)52に記憶する。調整を受けた予測は、短期モニタ48が標準的なSBAS性能からの予想外の偏倚が発生していることを検出する場合に、標準インテグリティ値に基づく予測の代わりに使用される。短期モニタ48は、SBAS GEO衛星によって生成されるインテグリティデータを常時監視し、現在生成されているインテグリティデータをノミナルデータベース50内の対応する標準インテグリティデータ値と比較する。衛星予測モジュール34に保持されているGPS衛星及びSBAS GEO衛星停止スケジュールに合致しない、標準的なSBAS性能からの予想外の偏倚を検出する場合、調整を受けた予測を生成して調整予測データベース52に記憶する。
【0031】
短期モニタ48は、SBAS性能が予想標準性能から偏倚するときを検出するが、将来のいつそういった偏倚が終わるのかを確実に予測することはできない。したがって、短期モニタ48は、現在時刻に関して短期の調整予測を生成する。現在発生している偏倚は近い将来にわたって持続する可能性が高いが、偏倚がより遠い将来まで引き続き持続するかはあまり確かではない。
【0032】
短期モニタ48によって生成される調整予測データベース52は、各SBAS GEO衛星の、長期モニタによって生成されるノミナルデータベース50と同じ種類のインテグリティデータ値を含み、各GPS衛星及びSBAS GEO衛星のUDREI値及びMT28値並びに、各IGPのGIVEI値を含む。調整予測データベース52内のデータは、(インテグリティ監視間隔中、記憶されるノミナルデータベース50内のデータと異なり)予測時間フレームにわたって記憶される。調整予測データベース52が更新されるときは常に、短期モニタ46は通知をフレーム生成モジュール56に送信して、影響を受けるすべての予測時間フレームに対するインテグリティ予測結果を再評価する。
【0033】
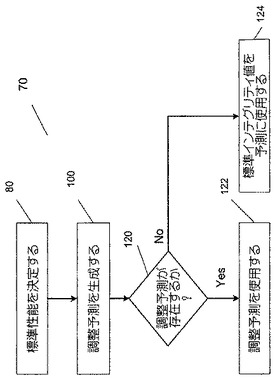
図3及び図4を参照すると、インテグリティ予測モジュール44はプロセス、たとえばプロセス70を使用して、或る時間間隔中のナビゲーション補強システムの将来の性能を予測することができる。長期モニタ46(図2)は、例示的なサブプロセス80を使用することができ、短期モニタ48(図2)は例示的なサブプロセス100を使用することができる。短期モニタ48(図2)がその時間間隔に対する調整予測を生成する場合、これら調整予測が使用され、調整予測が生成されない場合は、ノミナルデータベース46(図2)内の対応するインテグリティ監視間隔からの標準インテグリティ値が予測値に使用される。
【0034】
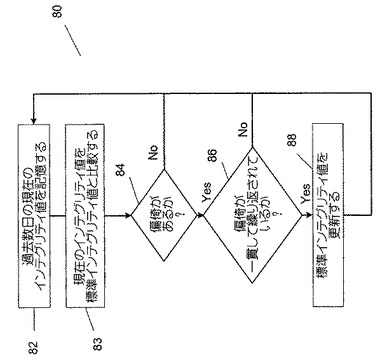
長期モニタ46(図2)は、サブプロセス80(図4)を使用して、過去の長期間にわたってナビゲーション補強システムの性能を監視し、ノミナルデータベース50(図2)に記憶される標準インテグリティ値を導出する。サブプロセス80は、同じインテグリティ監視間隔中のデータ収集モジュール24(図2)から得られた現在のインテグリティ値をノミナルデータベース50(図2)内の標準インテグリティ値と比較する(82)。現在のインテグリティ値は、最新のインテグリティ監視間隔中に生成されたインテグリティ値を含む。サブプロセス80は、現在のインテグリティ値を、過去数日(たとえば、5日)間に受信したインテグリティ値を保持するために使用されるデータ構造に記憶する。サブプロセス80は、現在のインテグリティ値とノミナルデータベース50にすでに記憶されている通常インテグリティ値との間に逸脱(偏倚)があるか否かを判断する(84)。偏倚がある場合、サブプロセス80は、過去数日に記憶された標準インテグリティ値を調べ、偏倚が一貫して繰り返されていたか否かを判断する(86)。偏倚が一貫して繰り返されていた場合、サブプロセス80は標準インテグリティ値を更新する(88)。
【0035】
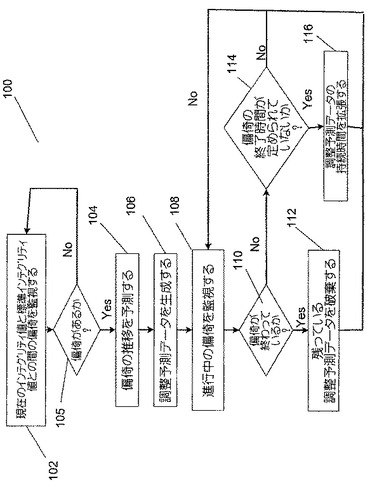
図5を参照すると、短期モニタ48は例示的なサブプロセス100を使用して、ナビゲーション補強システムの標準性能からの偏倚(偏差)を検出し、或る時間限界中のこれら偏倚の将来の予測調整予測を生成する。サブプロセス100は、データ収集モジュール24(図2)から得られる現在のインテグリティ値を監視し、これらをノミナルデータベース50(図2)に記憶されている標準インテグリティ値と比較して、何らかの偏倚があるか否かを判断する(102)。サブプロセス100は、偏倚の性質を1組の既知の偏倚パターンと照合することによって偏倚の起こる可能性の高い推移を予測する(104)。サブプロセス100は、予測される程度の偏倚にわたる、近い将来の間隔中の調整データを生成する(106)。サブプロセス100はまた、調整予測が生成される進行中の偏倚を監視する(108)。サブプロセス100は現在のインテグリティ値を調べて、偏倚が終わっているか否かを判断する(110)。偏倚が終わっている場合、サブプロセス100は、その偏倚に対する、残っている調整予測データを破棄する(112)。偏倚がなお進行中であり、且つ偏倚が、終了時間が定まらない種類の偏倚である場合(114)、サブプロセス100はその偏倚に対する予測データの持続時間を拡張する(116)。
【0036】
短期モニタ48が検出し、調整予測データを生成するSBAS性能偏倚(偏差)の種類としては、電離層嵐、SBAS基準ステーションの停止、及びSBAS内部インテグリティ監視による残差限界の一時的な上昇等の状況に起因する偏倚が含まれる。
【0037】
再び図3を参照すると、プロセス70は、調整予測が存在するか否かを判断する(120)。調整予測が存在する場合、プロセス70は調整予測を使用する(122)。調整予測が存在しない場合、プロセス70は標準値を予測に使用する(124)。
【0038】
プロセス70を使用して、たとえば現在時刻から24時間後の推移窓が常に更新され、近い将来のナビゲーション補強システムの挙動予測をユーザに与えることができるように、ナビゲーション補強システムの将来の性能を常時予測することができる。
【0039】
再び図2を参照すると、フレーム生成モジュール56はフレームデータを組み立て、フレームデータは、GPSユーザ及びSBASユーザが予測時間窓内の任意の時間でインテグリティ限界を判断するために必要なすべてのデータを含む。フレーム生成モジュール56によって組み立てられるフレームデータは、ユーザインテグリティ評価モジュール58にルーティングされる。フレームデータは、各GPS衛星及びSBAS GEO衛星の位置及び健康状態で構成される衛星予測モジュール34から得られる衛星データを含む。フレームデータは、各SBAS GEO衛星によって生成される各GPS衛星及びSBAS GEO衛星のUDREI値及びMT28値、並びに各SBAS GEO衛星によって生成される各IGPのGIVEIで構成されるインテグリティ予測モジュール44から得られるインテグリティデータも含む。フレーム生成モジュール56は、予測時間窓中のどの時間フレームを評価する必要があるかを示すフレームスケジュールデータベース57を含む。フレーム生成モジュール56はフレームスケジュールデータベース57を使用して、インテグリティ評価結果が、評価する必要のあるすべての予測時間フレームに対して生成されることを保証する。
【0040】
ユーザインテグリティ評価モジュール58は、フレーム生成モジュール56から受信したフレームデータを使用して、広範な地理的エリアにわたる多数の位置(たとえば、100000)でのGPSのインテグリティ限界及びSBASのインテグリティ限界を計算する。各位置は、エミュレートされるGPSユーザ及びSBASユーザを表す。インテグリティ限界は、異なる場所にいるユーザ毎に変化するため、各エミュレーションユーザのインテグリティ限界は、ユーザの位置で実際のGPS受信機及びSBAS受信機が使用するものと同じアルゴリズムを使用して別個に計算される。エミュレーションユーザを使用してインテグリティ限界を計算するのは、エリア全域にわたるユーザ位置に分散した多数の実際のGPS受信機及びSBAS受信機のインストール、制御、及び監視を必要とする手法と比較して、広範な地理的エリア全域に分散したユーザのインテグリティ限界を決定(判定)する実用的な手法である。すべてのエミュレーションユーザに対して計算されたインテグリティ限界は、サービスアベイラビリティ監視モジュール60にルーティングされる。
【0041】
多数のエミュレーションユーザに対してインテグリティ限界を計算するには、相当量の処理時間が必要になる可能性がある。インテグリティ限界計算のスループットを上げるために、システムは、別個のプロセッサ上で並列に実行される2つ以上のユーザインテグリティ評価モジュール58を含むことができる。
【0042】
サービスアベイラビリティ監視モジュール60は、受信したインテグリティ限界に基づいて、いくつかのGPS型ナビゲーションサービス及びSBAS型ナビゲーションサービスのそれぞれの所与の時間(たとえば、過去、現在、又は未来)での地理的エリア全域にわたる位置での可用性を決定する。サービスアベイラビリティ監視モジュール60は、GPSナビゲーションサービス及びSBASナビゲーションサービスの可用性を監視する地理的エリアの定義(たとえば、場所、領域、ルート、又はフライトプラン)を含む監視エリアデータベース64を管理する。サービスアベイラビリティ監視モジュール60は、各監視エリア内で発生すると予測されるGPSナビゲーションサービス及びSBASナビゲーションサービスの可用性が停止する時間及び持続時間を検出する。すべての監視エリアのナビゲーションサービス停止予測についての情報は、サービス停止データベース66に記憶される。
【0043】
ユーザインタフェース60がディスプレイを提供し、広範な地理的エリア全域での異なる時間でのインテグリティ限界及びナビゲーションサービス可用性等のデータを示す地理等高線表示、並びに異なる組の監視エリアのナビゲーションサービス可用性停止予測等のデータを示すリスト表示等のリポートを生成する。ユーザインタフェース60は、GPS及びGEO衛星停止スケジュールを更新する機能及びNOTAMS(すなわち、次回のナビゲーションサービス可用性停止の公の警告)の生成をサポートする機能等の機能を含むことができる。ユーザインタフェース60は、たとえばモニタ又はプリンタであってもよい。
【0044】
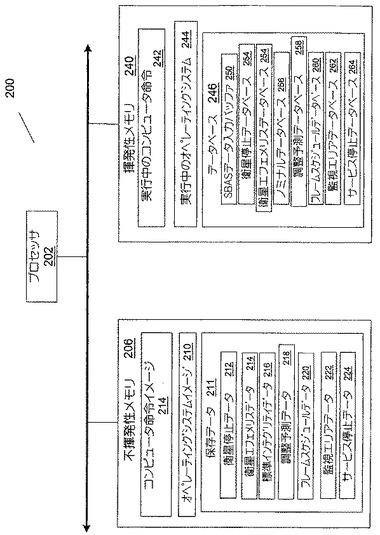
図6は、プロセス70の実行に使用することができるコンピュータ200を示す。コンピュータ200は、プロセッサ202、揮発性メモリ204、及び不揮発性メモリ206(たとえば、ハードディスク)を含む。不揮発性メモリ206は、オペレーティングシステムイメージ210及びプロセス70のコンピュータ命令イメージ214を含むことができる。不揮発性メモリ206は保存データ211も含むことができ、保存データ211を揮発性メモリにロードして、プロセス70の実行を開始するときにデータベースの内容を初期化することができる。保存データ211は、衛星停止データ212、衛星エフェメリスデータ214、標準インテグリティデータ216、調整予測データ218、フレームスケジュールデータ220、監視エリアデータ222、及びサービス停止データ224を含むことができる。揮発性メモリ240は、実行中のオペレーティングシステム244、プロセス70のコンピュータ命令242、及び実行中のプロセス70によって使用されるデータベース246を含むことができる。データベースは、SBASデータ入力バッファ250、衛星停止データベース252、衛星エフェメリスデータベース254、ノミナルデータベース256、調整予測データベース258、フレームスケジュールデータベース260、監視エリアデータベース262、及びサービス停止データベース264を含むことができる。
【0045】
プロセス70は、図6のハードウェア及びソフトウェアとの併用に限定されず、任意のコンピューティング又は処理環境で、コンピュータプログラムを実行可能な任意の種類の機械又は機械のセットにも適用することが可能である。プロセス70は、ハードウェア、ソフトウェア、又はこれらの2つの組み合わせで実施することができる。プロセス70は、プロセッサ、記憶媒体又はプロセッサにより可読の他の製品(揮発性メモリ、不揮発性メモリ、及び/又は記憶要素を含む)、少なくとも1つの入力装置、並びに1つ又は複数の出力装置をそれぞれ含むプログラマブルコンピュータ/機械で実行されるコンピュータプログラムで実施することができる。プログラムコードを、入力装置を使用して入力されたデータに対して適用して、プロセス70を実行し、出力情報を生成することができる。
【0046】
システムは、少なくとも一部は、たとえば、データ処理装置(たとえば、プログラマブルプロセッサ、又は1つ若しくは複数のコンピュータ))によって実行されるか、又はデータ処理装置の動作を制御するコンピュータプログラム製品(すなわち、情報キャリア(たとえば、機械可読記憶装置又は伝搬信号)で有形に具現されるコンピュータプログラム)を介して実施することができる。このような各プログラムは、高水準手続き型又はオブジェクト指向型プログラミング言語で実装して、コンピュータシステムと通信することができる。しかし、プログラムはアセンブリ言語又は機械語で実装してもよい。言語はコンパイル型言語であってもインタプリタ型言語であってもよく、スタンドアロンプログラム、モジュール、構成要素、サブルーチン、又はコンピューティング環境での使用に適した他のユニットを含む任意の形態で配備することができる。コンピュータプログラムは、1台のコンピュータで、又は一カ所にあるか、若しくは複数箇所に分散して通信ネットワークによって相互接続された複数のコンピュータで実行されるように配備することができる。コンピュータプログラムは、記憶媒体又は記憶装置がコンピュータに読み取られたときにプロセス70を実行するようにコンピュータを構成して動作させる汎用又は特定用途向けのプログラマブルコンピュータにより可読の記憶媒体又は記憶装置(たとえば、CD−ROM、ハードディスク、又は磁気ディスク)に記憶することができる。サブプロセス80及び100も、実行されると、コンピュータプログラム命令がコンピュータをプロセス70に従って動作させるコンピュータプログラムが構成された機械可読記憶媒体として実施することができる。
【0047】
本明細書において述べたプロセスは、本明細書において述べた特定の実施形態に限定されない。たとえば、プロセスは図3〜図5の特定の処理順に限定されない。むしろ、図3〜図5の任意のブロックは、上記結果を達成するように必要に応じて順番を変更してもよく、結合してもよく、又は除去してもよい。
【0048】
本明細書において述べたシステムは、上述したハードウェア及びソフトウェアとの併用に限定されない。システムは、デジタル電子回路、コンピュータハードウェア、ファームウェア、ソフトウェア、又はこれらの組み合わせで実施してもよい。
【0049】
システムの実施に関連する方法ステップは、1つ又は複数のコンピュータプログラムを実行してシステムの機能を実行する1つ又は複数のプログラマブルプロセッサによって実行することができる。システムのすべて又は一部は、特定用途向け論理回路(たとえば、FPGA(フィールドプログラマブルゲートアレイ)及び/又はASIC(特定用途向け集積回路)として実装することができる。
【0050】
コンピュータプログラムの実行に適したプロセッサとしては、例として、汎用マイクロプロセッサ及び特定用途向けマイクロプロセッサの両方並びに任意の種類のデジタルコンピュータのうちの任意の1つ又は複数のプロセッサが含まれる。一般に、プロセッサは、読み取り専用メモリ又はランダムアクセスメモリ又はこれらの両方から命令及びデータを受け取る。コンピュータの要素としては、命令を実行するプロセッサ並びに命令及びデータを記憶する1つ又は複数のメモリ装置が含まれる。
【0051】
システムは、本明細書において述べた具体例に限定されない。たとえば、本明細書において述べたシステムは衛星ナビゲーションシステム内にあるが、ナビゲーション性能の評価を必要とする任意のナビゲーションシステム内でシステムを使用してもよい。
【0052】
本明細書において述べた異なる実施形態の要素を組み合わせて、特に上述しなかった他の実施形態を形成することが可能である。本明細書において特に述べられていない他の実施形態も特許請求の範囲に含まれる。
【図面の簡単な説明】
【0053】
【図1】ナビゲーション環境の概略図である。
【図2】ナビゲーション監視・予測システムの概略図である。
【図3】ナビゲーション補強システムの性能を監視し予測するプロセスのフローチャートである。
【図4】ナビゲーション補強システムを長期監視するプロセスのフローチャートである。
【図5】ナビゲーション補強システムを短期監視するプロセスのフローチャートである。
【図6】図3のプロセスを実装することができるコンピュータシステムのブロック図である。
【技術分野】
【0001】
本発明はナビゲーションシステムに関し、特にナビゲーション衛星システムに関する。
【背景技術】
【0002】
全地球航法衛星システム(GNSS:Global Navigation Satellite System)は測距信号及び他の信号を送信し、陸海空のユーザがこれらの信号を使用して、三次元位置、速度、及び日時を決定する。GNSSは、信号をユーザに送信するための衛星ネットワークを含む。GNSSの一例は全地球測位システム(GPS)である。GPSは、中高度軌道で動作する24基以上の衛星のネットワークを含み、これらはGPS衛星と呼ばれる。
【0003】
GNSSユーザが決定する位置解は、衛星エフェメリスデータ誤差、衛星クロックドリフト、電離層遅延、対流圏遅延、マルチパス信号、及び受信機ノイズ等の要因により或る程度の不正確性を有する。位置解の不正確性の程度を決定(判定)するために、GNSSユーザは、位置解で発生し得る最大距離誤差の高精度限界である完全性(インテグリティ:integrity)限界を計算することができる。インテグリティ限界は、GNSSユーザによって決定された位置解の不確実性量を制限する。GNSSユーザの位置解誤差がインテグリティ限界を超える確率は極めて小さいため、ユーザに対して、実際の位置がGNSSを使用して決定された位置解からインテグリティ限界距離内にあることがほぼ保証される。一般に、インテグリティの高いナビゲーションシステムほど、ユーザはより小さいインテグリティ限界を計算することができ(発生し得る誤差をより厳密に制限する)、ひいてはユーザの決定した位置の不正確性を低減することができる。GNSSそれ自体によって提供されるインテグリティレベルは、ユーザが、航空機ナビゲーション等のいくつかの用途の要件を満たすのに十分に小さなインテグリティ限界を決定するには不十分な場合がある。
【0004】
オーグメンテーション(補強)システムと呼ばれる他のシステムは、補正データ及びインテグリティデータを生成し、これらデータをユーザに報知する。ユーザは補強システムからのデータを利用して、GNSSから受信したデータを補足し、位置解の精度及びインテグリティを上げる。補強システムによって生成される補正データは、上述した要因等の要因によって生じる誤差のいくらかを補償する調整である。位置解の精度を上げるよう、ユーザは補正データを利用する。インテグリティデータは、補正データを適用した後でもなお残り得る残存誤差を制限する値を含む。ユーザはインテグリティデータを利用して、位置解に残存する可能性のある不正確性の程度を減じるより厳密なインテグリティ限界を決定する。
【0005】
GPSと併せて使用される典型的な補強システムは、GPS衛星からGPSデータを受信するGPS受信機を有する1つ又は複数の基準ステーションを含む。基準ステーション受信機の正確な位置は判明している。マスタ制御ステーションが、基準ステーションによって収集されたGPSデータを受信し、各GPS衛星について、基準ステーション受信機の既知の位置に基づく衛星の予想限界と、GPSデータを使用して決定される衛星の観測限界との間のバイアスを決定する。マスタ制御ステーションはまた、GPS衛星の性能を監視して異常をユーザに報告し、それによってGPSユーザにより高いインテグリティを提供する。マスタ制御ステーションは、ユーザに報知される補正データ及びインテグリティデータを生成する。
【0006】
既知の一種の補強システムは、衛星型補強(オーグメンテーション)システム(SBAS:satellite-based augmentation system)である。典型的なSBASは、SBASがサービス提供する広い地理的領域全域にわたる位置に、GPS受信機を有する1組の基準ステーションを含む。SBASマスタ制御ステーションによって生成される補正データ及びインテグリティデータは、1つ又は複数の対地球同期軌道(GEO)衛星に送信されて、GPS衛星と同じ周波数でGPS衛星と同様のフォーマットで広域全域にわたるユーザに報知される。この方法では、ユーザのGPS受信機がSBAS GEO衛星及びGPS衛星の両方からの信号を受信することができ、SBAS GEO衛星を追加の測位源として提供して可用性(アベイラビリティ)を向上させるというさらなる利点がある。SBASサービスエリアはSBAS GEO衛星のフットプリント(経度及び緯度でおよそ+/−76度に広がる)並びにサービスエリア全域に分散するSBAS基準ステーションの数量及び位置によって制限されるため、単一のSBASがユーザにサービスを提供できるのは、一国全域又は大陸全域であり得る。
【0007】
別の既知の種類の補強システムは地上型補強(オーグメンテーション)システム(GBAS:ground-based augmentation system)である。典型的なGBASは、GBASによってサービス提供されるローカルエリア(たとえば、半径20マイル又は半径30マイル)内に配置されるGPS受信機を有する1組の基準ステーションを含む。GBASマスタ制御ステーションは補正データ及びインテグリティデータを生成し、これらのデータはVHFデータリンクを介してGBASのすぐ近くのユーザに報知される。GBASサービスエリアはVHF送信機のカバレージエリア及び基準ステーションの局在的な分布によって制限されるため、単一のGBASを使用できるのは、空港周辺等のローカルエリア内のみであり得る。単一のGBASは、ローカルエリア内でのみ動作するため、そのエリアに対してより正確な補正データ及びより厳密な限界のインテグリティデータを提供することができ、同エリアにサービスを提供するSBASよりも速く障害状況をユーザに警告することができる。
【0008】
さらなる既知の種類の補強システムであって、固定位置にある基準ステーションを使用しない補強システムは、上空型補強(オーグメンテーション)システム(ABAS:air-based augmentation system)である。ABASは通常、ユーザ自身のGPS受信機のみを使用して、GPS衛星からGPSデータを受信し、GPSデータを、慣性航法装置(INS)等の他の機器からのデータで補足することもできる。ABASは、受信機自律型インテグリティ監視(RAIM:Receiver Autonomous Integrity Monitoring)法を使用してインテグリティ監視を行う。RAIMは、種々の組み合わせのGPS衛星を使用して達成された結果の比較に基づくため、ABASは、基本的な位置特定に決定される最小で4つのGPS衛星よりも多くのGPS衛星を視野内に必要とする。したがって、ABASは可用性が低減する可能性があることを代償としてインテグリティを獲得する。
【0009】
航空機ナビゲーション用にGNSSを使用する許可は政府及び国際組織によって認可され、こうした組織は、種々の種類の航空機ナビゲーション(たとえば、種々の飛行行程)に使用することができる種々のGNSSナビゲーションサービスに対する要件を規定している。GNSSナビゲーションサービスによってはGNSS単独でサポートされるものもあれば、SBAS又はGBAS等の補強システムで補足されたGNSSによってサポートされるものもある。各種のGNSSナビゲーションサービスの要件により、その種類のナビゲーションサービスを使用したときに許容できるユーザ位置解の最大誤差を制限するインテグリティ限界の限界閾値が指定される。インテグリティ限界が、ナビゲーションサービスについて規定された閾値限度以下であるとユーザが判断できる場合に、ユーザはそのナビゲーションサービスを利用することができる(すなわち、使用が認可される)。たとえば、カテゴリ1の航空機着陸のGNSSナビゲーションサービスの要件は、ユーザの水平位置解のインテグリティ限界が40m以下であり、且つユーザの垂直位置解のインテグリティ限界が10m以下であることを指定している。
【0010】
ユーザによって判断されるインテグリティ限界の大きさは、ユーザに対するGNSS衛星の位置、その時点でのGNSS及び補強システム(該当する場合)の性能、及び環境条件(たとえば、対流圏及び電離層)を含むいくつかの要因に依存する。これら要因は通常、経時変化するとともにユーザの位置によって変化する。ユーザが同じ位置に留まる場合であっても、その時々で、同ユーザが判断するインテグリティ限界が変化することが典型的である。同じ時点であっても、異なる場所にいるユーザが判断するインテグリティ限界が異なることも典型的である。随時、GNSSナビゲーションサービスは、或る場所(インテグリティ限界が要求される閾値内である)にいるユーザに提供することができるが、他の場所(インテグリティ限界が要求される閾値を超える)にいるユーザには提供することができない。
【発明の開示】
【課題を解決するための手段】
【0011】
一態様では、ナビゲーション補強(オーグメンテーション)システムの予測性能を決定(判定)する方法は、ナビゲーション補強システムの標準性能を決定し、標準性能の決定に基づいて、ナビゲーション補強システムの予測性能を決定することを含む。
【0012】
別の態様では、ナビゲーション補強システムの予測性能を決定するシステムは、ナビゲーション補強システムの標準性能を決定する長期モニタと、ナビゲーション補強システムの標準性能に基づいてナビゲーション補強システムの予測性能を決定する短期モニタとを備える。
【0013】
さらなる態様では、本発明は、ナビゲーション補強システムの予測性能を決定するための実行可能な命令を記憶した機械可読媒体を含む物品である。この命令は機械に、ナビゲーション補強の標準性能を決定し、標準性能の決定に基づいて、第2の時間間隔中のナビゲーション補強システムの予測性能を決定することを実行させる。
【発明を実施するための最良の形態】
【0014】
ナビゲーションシステム及びナビゲーション補強システムの将来の性能の程度を予測する能力が有用である。これは、ナビゲーションシステムの性能予測が、いつどこでナビゲーションサービスがユーザに提供されるか、又はされないかを指定するナビゲーションサービス予測予報を生成するために使用されることがあるためである。次回のナビゲーションサービス停止の警告を使用して、進行中の航行をナビゲーションサービスに頼っているユーザにナビゲーションサービスの提供が不能になったときに破滅的且つ安全でない可能性のある状況を回避することができる。ナビゲーションサービス予測予報によって、ユーザは、サービスが利用できなくなるときにその場所でナビゲーションサービスを使用しないように事前にナビゲーションプランを調整することができるようになる。
【0015】
図1を参照すると、全地球測位システム(GPS)及び衛星型補強(オーグメンテーション)システム(SBAS)を有するナビゲーション環境10は、GPS衛星(たとえば、GPS衛星12a及びGPS衛星12b)並びに1つ又は複数のSBAS型補強システム用の静止(GEO)衛星(たとえば、GEO衛星14a及びGEO衛星14b)を含む。SBAS補強GPSのユーザは、視野内(すなわち、見通し線内)にあるGPS衛星12a及び12bによって報知されるGPSデータ並びに視野内にあるSBAS GEO衛星14a及び14bによって報知されるSBASデータを受信して処理する。ナビゲーション監視・予測システム20が、GPS及びSBASの性能の監視及び予測に使用される。ナビゲーション監視・予測システム20は、GPS衛星12a及び12b並びにSBAS GEO衛星14a及び14bによってユーザに報知されるものと同じGPSデータ及びSBASデータを処理する。ナビゲーション監視・予測システム20は、GPSデータ及びSBASデータを使用して、現在のGPS及びSBASの性能を判断するとともに、GPS及びSBASのナビゲーションサービスが現在利用可能な場所を判断する。ナビゲーション監視・予測システム20はまた、GPSデータ及びSBASデータを使用して、将来のGPS及びSBASの性能を予測するとともに、将来にいつどこでGPS及びSBASナビゲーションサービスが利用できるようになるかを予測する。
【0016】
ナビゲーション監視・予測システム20は、単一のデータソースから受信する、GPS衛星12a及び12bによって報知されるGPSデータ及びSBAS GEO衛星14a及び14bによって報知されるSBASデータを使用して、SBAS GEO衛星によってカバーされる広範な地理的サービスエリア全域にわたる場所でのGPSナビゲーションサービス及びSBASナビゲーションサービスの現在及び予測される将来の可用性(アベイラビリティ)を判断する。
【0017】
本明細書において述べるナビゲーション監視・予測システム20はSBASとの併用向きであるが、ナビゲーション監視・予測システム20は他の種類の補強システムと併用することも可能である。本明細書において述べるナビゲーション監視・予測システム20はGPSとの併用向きであるが、ナビゲーション監視・予測システム20は他の種類又は複数の種類のGNSSと併用することも可能である。
【0018】
図2を参照すると、ナビゲーション監視・予測システム20は、データ収集モジュール24、衛星予測モジュール34、インテグリティ予測モジュール44、フレーム生成モジュール56、ユーザインテグリティ評価モジュール58、サービスアベイラビリティ(可用性)監視モジュール60、及びユーザインタフェース62を含む。ナビゲーション監視・予測システム20は、予測時間窓(たとえば、現在時刻から将来の72時間)にわたる時々でのGPS及びSBASの予測性能並びにGPSナビゲーションサービス及びSBASナビゲーションサービスの予測可用性を生成する。予測時間窓は等長(たとえば、1分)の予測時間フレームに分けられる。ナビゲーション監視・予測システム20は、予測時間窓内の各予測時間フレームに対して予測を生成する。
【0019】
データ収集モジュール24は、GPSデータ及びSBASデータをソース(たとえば、SBAS対応GPS受信機)から受信する。GPSデータは、各GPS衛星のエフェメリスデータ(すなわち、軌道パラメータ)及び健康状態データを含み、衛星予測モジュール34にルーティングされる。SBASデータは、各SBAS GEO衛星によって報知され、各GPS衛星及びSBAS GEO衛星のユーザディファレンシャル(微分)レンジ誤差指数(UDREI:user differential range error indicator)データ及びクロックエフェメリス共分散マトリックス(MT28)データで構成されるインテグリティデータ並びに各SBAS GEO衛星のIGPマスク内の各電離層格子点(IGP)の格子点電離層垂直遅延量誤差指数(GIVEI)データを含む。データ収集モジュール24はSBASデータ入力バッファ(IB)26を含み、ここに各SBAS GEO衛星からのSBASデータが記憶される。各SBAS GEO衛星からのデータは、SBASデータ入力バッファ26において別個に処理されて記憶される。SBASデータ入力バッファ26は、現在時刻前の或る時間(たとえば、10分)から現在時刻後の或る時間(たとえば、10分)にわたる収集時間間隔中、データを保持する。各SBASデータ値は、その種類のデータに適した妥当な時間間隔にわたってSBASデータ入力バッファ26に記憶される。新しいSBASデータ値を予想報告間隔以内にSBAS GEO衛星から受信しない場合に、SBASデータ入力バッファ26に記憶されているデータ値の劣化が起こる。周期的に、各インテグリティ監視間隔(たとえば、1分)の終わりに、データ収集モジュール24は、SBASデータ入力バッファ26に収集したデータを処理する。データ収集モジュール24は、インテグリティ監視間隔中の各GPS衛星及びSBAS GEO衛星について収集された一連のUDREI値及びMT28値、並びに各IGPについて収集された一連のGIVEI値を調べ、各一連の値をそのインテグリティ監視間隔の単一の代表的なUDREI値、MT28値、又はGIVEI値にまとめる。そのインテグリティ監視間隔中の代表的なUDREI値、MT28値、及びGIVEI値で構成される現在のインテグリティ値が、インテグリティ予測モジュール44にルーティングされる。
【0020】
データ収集モジュール24は、データの送信元のSBAS GEO衛星を特定するアクティブGEOデータを、SBAS GEO衛星の動作状態を監視する衛星予測モジュール34に提供する。
【0021】
衛星予測モジュール34は、GPS衛星及びSBAS GEO衛星の性能を監視し、予測時間窓にわたるGPS衛星及びSBAS GEO衛星の性能の予測を生成する。衛星予測モジュール34は、衛星停止スケジュール(OS:outage schedule)データベース36及びエフェメリスデータベース(ED)38を含む。衛星停止スケジュールデータベース36は、各GPS衛星及びSBAS GEO衛星に1組の時間間隔を含み、この時間間隔は、衛星が動作可能でなくなる将来の時間を示す。エフェメリスデータベース38は、各GPS衛星から受信した最新のエフェメリスデータを含む。
【0022】
衛星予測モジュール34は、衛星停止スケジュールデータベース36からのデータを使用して、各GPS衛星及びSBAS GEO衛星が、予測時間窓内の各予測時間フレーム中に動作可能であるか否かを予測する。衛星予測モジュール34は、更新された衛星停止スケジュール情報を受信すると、その更新された情報を衛星停止スケジュールデータベース36に記憶し、通知をフレーム生成モジュール56に送信して、更新された停止スケジュールによって影響を受ける予測時間窓内のすべての予測時間フレームに対するインテグリティ予測結果を再評価する。衛星停止スケジュールへの更新は、ユーザによって直接入力されてもよく、ユーザインタフェースによって提供される機能を通して入力されてもよく、又は次回の衛星停止についての情報を提供するサービスへの接続又はそのサービスからの電子メールから自動的に得てもよい。
【0023】
衛星予測モジュール34は、到来するGPSデータ及びアクティブGEOデータを監視し、GPS衛星及びSBAS GEO衛星の実際の動作状態と、衛星停止スケジュールデータベース36内の情報によって示されるこれらの衛星の予想される動作状態との不一致を検出する。スケジュール外のGPS衛星又はSBAS GEO衛星の停止が検出される場合、衛星予測モジュール34は、不正確な停止スケジュールをオーバーライドする更新された衛星動作予測を生成し、利用できない衛星が予測評価から除外されるように、通知をフレーム生成モジュール56に送信して、影響を受けるすべての予測時間フレームに対するインテグリティ予測結果を再評価する。同様に、GPS衛星又はSBAS GEO衛星が、停止するとスケジュールされているときに動作可能であることが分かった場合も、衛星予測モジュール34は、停止スケジュールをオーバーライドする更新された衛星動作予測を生成し、動作可能な衛星が予測評価に含められるように、通知をフレーム生成モジュール56に送信する。
【0024】
衛星予測モジュール34は、エフェメリスデータベース38からのデータを使用して、予測時間窓内の各予測時間フレーム中の各GPS衛星及びSBAS GEO衛星の位置を予測する。衛星予測モジュール34は、更新された衛星エフェメリスデータを受信すると、そのデータをエフェメリスデータベース38に記憶し、通知をフレーム生成モジュール56に送信して、更新されたエフェメリスによって影響を受ける予測時間窓内のすべての予測時間フレームに対するインテグリティ予測結果を再評価する。
【0025】
衛星予測モジュール34は、新しいGPS衛星についての到来するGPSデータを監視する。新しいGPS衛星が検出された場合、そのGPS衛星は衛星停止スケジュールデータベース36及びエフェメリスデータベース38に加えられる。衛星予測モジュール34はまた、タイムアウト(時間切れ期間、たとえば、24時間)中にGPS衛星からデータを受信しなかった場合にその衛星を時間切れとする。時間切れした衛星は、衛星停止スケジュールデータベース36及びエフェメリスデータベース38から除外される。GPS衛星が追加又は削除されるとき、通知がフレーム生成モジュール56に送信されて、予測期間全体にわたるすべての予測時間フレームに対するインテグリティ予測結果が再評価される。
【0026】
インテグリティ予測モジュール44は、SBAS GEO衛星からのインテグリティデータを監視し、SBAS GEO衛星が予測時間窓中にユーザに向けて報知するインテグリティデータ予測を生成する。インテグリティデータは、各GPS衛星及びSBAS GEO衛星のユーザディファレンシャルレンジ誤差指数(UDREI)データ及びクロックエフェメリス共分散マトリックス(MT28)データ、並びに各SBAS GEO衛星のIGPマスク内の各電離層格子点(IGP)についての格子点電離層垂直遅延量誤差指数(GIVEI)データを含む。インテグリティ予測モジュール44は長期モニタ46を含み、短期モニタ48を含むこともできる。
【0027】
長期モニタ46は、各SBAS GEO衛星の全組の標準インテグリティデータ値(各GPS衛星及びSBAS GEO衛星のUDREI値及びMT28値、並びに各IGPのGIVEI値)を含むノミナルデータベース(ND:nominal database)50を生成する。長期モニタ46は、SBAS GEO衛星がそれまでに生成したインテグリティデータを監視することによって各SBAS GEO衛星の標準インテグリティデータ値を導出する。ノミナルデータベース50内のデータは、最近まででSBAS GEO衛星によって最も一貫して生成されたインテグリティデータ値である。近い将来の状況が最近の状況と同様である場合、SBAS GEO衛星が、過去に一貫して生成していたものと同じインテグリティデータ値を将来でも一貫して生成し続ける可能性が高い。近い将来の状況が標準である(すなわち、最近一貫して発生した状況に類似する)と予想される場合、過去のSBAS性能に基づくノミナルデータベース50内の同じ標準インテグリティデータ値を、将来のSBAS性能を予測する値として使用することができる。
【0028】
ノミナルデータベース50は、24時間にわずかに満たない全恒星日にわたる各インテグリティ監視間隔のインテグリティデータ値を含む。ノミナルデータベース50は、恒星日内の各インテグリティ監視間隔中(たとえば、1分)の各SBAS GEO衛星の各種類のインテグリティデータの値を含む。GPS衛星の軌道周期は恒星日の半分であるため、GPS衛星は、各恒星日内の同じ時間オフセットで地球に対してほぼ同じ位置にある。SBAS基準ステーションに対して同じ状況のGPS衛星位置が、各恒星日のその同じ間隔中に再び発生するため、SBASは、後続の恒星日にわたって同じインテグリティ監視間隔中に同様のインテグリティ値を生成する可能性が高い。
【0029】
長期モニタ46は、SBAS GEO衛星によって生成されるインテグリティデータを常時監視し、必要に応じてノミナルデータベース50を更新して、データベース内の標準インテグリティデータをSBASの実際の過去の性能と一貫した状態に保つ。ノミナルデータベース50は、SBAS GEO衛星が将来に生成する可能性の高いインテグリティデータ値を含むため、長期モニタは、過去のSBAS性能での再現性のある傾向と一時的な逸脱(偏倚)とを区別する。一時的な偏倚中にSBAS GEO衛星によって過去に生成された値は、将来に再び発生する可能性は低いが、SBAS GEO衛星によって過去に一貫して生成されていた値は、将来に再び生成される可能性が高い。ノミナルデータベース50が更新されるときは常に、長期モニタ46は、通知をフレーム生成モジュール56に送信して、影響を受けるすべての予測時間フレームに対するインテグリティ予測結果を再評価する。
【0030】
短期モニタ48は調整を受けた予測を生成し、調整予測データベース(AD)52に記憶する。調整を受けた予測は、短期モニタ48が標準的なSBAS性能からの予想外の偏倚が発生していることを検出する場合に、標準インテグリティ値に基づく予測の代わりに使用される。短期モニタ48は、SBAS GEO衛星によって生成されるインテグリティデータを常時監視し、現在生成されているインテグリティデータをノミナルデータベース50内の対応する標準インテグリティデータ値と比較する。衛星予測モジュール34に保持されているGPS衛星及びSBAS GEO衛星停止スケジュールに合致しない、標準的なSBAS性能からの予想外の偏倚を検出する場合、調整を受けた予測を生成して調整予測データベース52に記憶する。
【0031】
短期モニタ48は、SBAS性能が予想標準性能から偏倚するときを検出するが、将来のいつそういった偏倚が終わるのかを確実に予測することはできない。したがって、短期モニタ48は、現在時刻に関して短期の調整予測を生成する。現在発生している偏倚は近い将来にわたって持続する可能性が高いが、偏倚がより遠い将来まで引き続き持続するかはあまり確かではない。
【0032】
短期モニタ48によって生成される調整予測データベース52は、各SBAS GEO衛星の、長期モニタによって生成されるノミナルデータベース50と同じ種類のインテグリティデータ値を含み、各GPS衛星及びSBAS GEO衛星のUDREI値及びMT28値並びに、各IGPのGIVEI値を含む。調整予測データベース52内のデータは、(インテグリティ監視間隔中、記憶されるノミナルデータベース50内のデータと異なり)予測時間フレームにわたって記憶される。調整予測データベース52が更新されるときは常に、短期モニタ46は通知をフレーム生成モジュール56に送信して、影響を受けるすべての予測時間フレームに対するインテグリティ予測結果を再評価する。
【0033】
図3及び図4を参照すると、インテグリティ予測モジュール44はプロセス、たとえばプロセス70を使用して、或る時間間隔中のナビゲーション補強システムの将来の性能を予測することができる。長期モニタ46(図2)は、例示的なサブプロセス80を使用することができ、短期モニタ48(図2)は例示的なサブプロセス100を使用することができる。短期モニタ48(図2)がその時間間隔に対する調整予測を生成する場合、これら調整予測が使用され、調整予測が生成されない場合は、ノミナルデータベース46(図2)内の対応するインテグリティ監視間隔からの標準インテグリティ値が予測値に使用される。
【0034】
長期モニタ46(図2)は、サブプロセス80(図4)を使用して、過去の長期間にわたってナビゲーション補強システムの性能を監視し、ノミナルデータベース50(図2)に記憶される標準インテグリティ値を導出する。サブプロセス80は、同じインテグリティ監視間隔中のデータ収集モジュール24(図2)から得られた現在のインテグリティ値をノミナルデータベース50(図2)内の標準インテグリティ値と比較する(82)。現在のインテグリティ値は、最新のインテグリティ監視間隔中に生成されたインテグリティ値を含む。サブプロセス80は、現在のインテグリティ値を、過去数日(たとえば、5日)間に受信したインテグリティ値を保持するために使用されるデータ構造に記憶する。サブプロセス80は、現在のインテグリティ値とノミナルデータベース50にすでに記憶されている通常インテグリティ値との間に逸脱(偏倚)があるか否かを判断する(84)。偏倚がある場合、サブプロセス80は、過去数日に記憶された標準インテグリティ値を調べ、偏倚が一貫して繰り返されていたか否かを判断する(86)。偏倚が一貫して繰り返されていた場合、サブプロセス80は標準インテグリティ値を更新する(88)。
【0035】
図5を参照すると、短期モニタ48は例示的なサブプロセス100を使用して、ナビゲーション補強システムの標準性能からの偏倚(偏差)を検出し、或る時間限界中のこれら偏倚の将来の予測調整予測を生成する。サブプロセス100は、データ収集モジュール24(図2)から得られる現在のインテグリティ値を監視し、これらをノミナルデータベース50(図2)に記憶されている標準インテグリティ値と比較して、何らかの偏倚があるか否かを判断する(102)。サブプロセス100は、偏倚の性質を1組の既知の偏倚パターンと照合することによって偏倚の起こる可能性の高い推移を予測する(104)。サブプロセス100は、予測される程度の偏倚にわたる、近い将来の間隔中の調整データを生成する(106)。サブプロセス100はまた、調整予測が生成される進行中の偏倚を監視する(108)。サブプロセス100は現在のインテグリティ値を調べて、偏倚が終わっているか否かを判断する(110)。偏倚が終わっている場合、サブプロセス100は、その偏倚に対する、残っている調整予測データを破棄する(112)。偏倚がなお進行中であり、且つ偏倚が、終了時間が定まらない種類の偏倚である場合(114)、サブプロセス100はその偏倚に対する予測データの持続時間を拡張する(116)。
【0036】
短期モニタ48が検出し、調整予測データを生成するSBAS性能偏倚(偏差)の種類としては、電離層嵐、SBAS基準ステーションの停止、及びSBAS内部インテグリティ監視による残差限界の一時的な上昇等の状況に起因する偏倚が含まれる。
【0037】
再び図3を参照すると、プロセス70は、調整予測が存在するか否かを判断する(120)。調整予測が存在する場合、プロセス70は調整予測を使用する(122)。調整予測が存在しない場合、プロセス70は標準値を予測に使用する(124)。
【0038】
プロセス70を使用して、たとえば現在時刻から24時間後の推移窓が常に更新され、近い将来のナビゲーション補強システムの挙動予測をユーザに与えることができるように、ナビゲーション補強システムの将来の性能を常時予測することができる。
【0039】
再び図2を参照すると、フレーム生成モジュール56はフレームデータを組み立て、フレームデータは、GPSユーザ及びSBASユーザが予測時間窓内の任意の時間でインテグリティ限界を判断するために必要なすべてのデータを含む。フレーム生成モジュール56によって組み立てられるフレームデータは、ユーザインテグリティ評価モジュール58にルーティングされる。フレームデータは、各GPS衛星及びSBAS GEO衛星の位置及び健康状態で構成される衛星予測モジュール34から得られる衛星データを含む。フレームデータは、各SBAS GEO衛星によって生成される各GPS衛星及びSBAS GEO衛星のUDREI値及びMT28値、並びに各SBAS GEO衛星によって生成される各IGPのGIVEIで構成されるインテグリティ予測モジュール44から得られるインテグリティデータも含む。フレーム生成モジュール56は、予測時間窓中のどの時間フレームを評価する必要があるかを示すフレームスケジュールデータベース57を含む。フレーム生成モジュール56はフレームスケジュールデータベース57を使用して、インテグリティ評価結果が、評価する必要のあるすべての予測時間フレームに対して生成されることを保証する。
【0040】
ユーザインテグリティ評価モジュール58は、フレーム生成モジュール56から受信したフレームデータを使用して、広範な地理的エリアにわたる多数の位置(たとえば、100000)でのGPSのインテグリティ限界及びSBASのインテグリティ限界を計算する。各位置は、エミュレートされるGPSユーザ及びSBASユーザを表す。インテグリティ限界は、異なる場所にいるユーザ毎に変化するため、各エミュレーションユーザのインテグリティ限界は、ユーザの位置で実際のGPS受信機及びSBAS受信機が使用するものと同じアルゴリズムを使用して別個に計算される。エミュレーションユーザを使用してインテグリティ限界を計算するのは、エリア全域にわたるユーザ位置に分散した多数の実際のGPS受信機及びSBAS受信機のインストール、制御、及び監視を必要とする手法と比較して、広範な地理的エリア全域に分散したユーザのインテグリティ限界を決定(判定)する実用的な手法である。すべてのエミュレーションユーザに対して計算されたインテグリティ限界は、サービスアベイラビリティ監視モジュール60にルーティングされる。
【0041】
多数のエミュレーションユーザに対してインテグリティ限界を計算するには、相当量の処理時間が必要になる可能性がある。インテグリティ限界計算のスループットを上げるために、システムは、別個のプロセッサ上で並列に実行される2つ以上のユーザインテグリティ評価モジュール58を含むことができる。
【0042】
サービスアベイラビリティ監視モジュール60は、受信したインテグリティ限界に基づいて、いくつかのGPS型ナビゲーションサービス及びSBAS型ナビゲーションサービスのそれぞれの所与の時間(たとえば、過去、現在、又は未来)での地理的エリア全域にわたる位置での可用性を決定する。サービスアベイラビリティ監視モジュール60は、GPSナビゲーションサービス及びSBASナビゲーションサービスの可用性を監視する地理的エリアの定義(たとえば、場所、領域、ルート、又はフライトプラン)を含む監視エリアデータベース64を管理する。サービスアベイラビリティ監視モジュール60は、各監視エリア内で発生すると予測されるGPSナビゲーションサービス及びSBASナビゲーションサービスの可用性が停止する時間及び持続時間を検出する。すべての監視エリアのナビゲーションサービス停止予測についての情報は、サービス停止データベース66に記憶される。
【0043】
ユーザインタフェース60がディスプレイを提供し、広範な地理的エリア全域での異なる時間でのインテグリティ限界及びナビゲーションサービス可用性等のデータを示す地理等高線表示、並びに異なる組の監視エリアのナビゲーションサービス可用性停止予測等のデータを示すリスト表示等のリポートを生成する。ユーザインタフェース60は、GPS及びGEO衛星停止スケジュールを更新する機能及びNOTAMS(すなわち、次回のナビゲーションサービス可用性停止の公の警告)の生成をサポートする機能等の機能を含むことができる。ユーザインタフェース60は、たとえばモニタ又はプリンタであってもよい。
【0044】
図6は、プロセス70の実行に使用することができるコンピュータ200を示す。コンピュータ200は、プロセッサ202、揮発性メモリ204、及び不揮発性メモリ206(たとえば、ハードディスク)を含む。不揮発性メモリ206は、オペレーティングシステムイメージ210及びプロセス70のコンピュータ命令イメージ214を含むことができる。不揮発性メモリ206は保存データ211も含むことができ、保存データ211を揮発性メモリにロードして、プロセス70の実行を開始するときにデータベースの内容を初期化することができる。保存データ211は、衛星停止データ212、衛星エフェメリスデータ214、標準インテグリティデータ216、調整予測データ218、フレームスケジュールデータ220、監視エリアデータ222、及びサービス停止データ224を含むことができる。揮発性メモリ240は、実行中のオペレーティングシステム244、プロセス70のコンピュータ命令242、及び実行中のプロセス70によって使用されるデータベース246を含むことができる。データベースは、SBASデータ入力バッファ250、衛星停止データベース252、衛星エフェメリスデータベース254、ノミナルデータベース256、調整予測データベース258、フレームスケジュールデータベース260、監視エリアデータベース262、及びサービス停止データベース264を含むことができる。
【0045】
プロセス70は、図6のハードウェア及びソフトウェアとの併用に限定されず、任意のコンピューティング又は処理環境で、コンピュータプログラムを実行可能な任意の種類の機械又は機械のセットにも適用することが可能である。プロセス70は、ハードウェア、ソフトウェア、又はこれらの2つの組み合わせで実施することができる。プロセス70は、プロセッサ、記憶媒体又はプロセッサにより可読の他の製品(揮発性メモリ、不揮発性メモリ、及び/又は記憶要素を含む)、少なくとも1つの入力装置、並びに1つ又は複数の出力装置をそれぞれ含むプログラマブルコンピュータ/機械で実行されるコンピュータプログラムで実施することができる。プログラムコードを、入力装置を使用して入力されたデータに対して適用して、プロセス70を実行し、出力情報を生成することができる。
【0046】
システムは、少なくとも一部は、たとえば、データ処理装置(たとえば、プログラマブルプロセッサ、又は1つ若しくは複数のコンピュータ))によって実行されるか、又はデータ処理装置の動作を制御するコンピュータプログラム製品(すなわち、情報キャリア(たとえば、機械可読記憶装置又は伝搬信号)で有形に具現されるコンピュータプログラム)を介して実施することができる。このような各プログラムは、高水準手続き型又はオブジェクト指向型プログラミング言語で実装して、コンピュータシステムと通信することができる。しかし、プログラムはアセンブリ言語又は機械語で実装してもよい。言語はコンパイル型言語であってもインタプリタ型言語であってもよく、スタンドアロンプログラム、モジュール、構成要素、サブルーチン、又はコンピューティング環境での使用に適した他のユニットを含む任意の形態で配備することができる。コンピュータプログラムは、1台のコンピュータで、又は一カ所にあるか、若しくは複数箇所に分散して通信ネットワークによって相互接続された複数のコンピュータで実行されるように配備することができる。コンピュータプログラムは、記憶媒体又は記憶装置がコンピュータに読み取られたときにプロセス70を実行するようにコンピュータを構成して動作させる汎用又は特定用途向けのプログラマブルコンピュータにより可読の記憶媒体又は記憶装置(たとえば、CD−ROM、ハードディスク、又は磁気ディスク)に記憶することができる。サブプロセス80及び100も、実行されると、コンピュータプログラム命令がコンピュータをプロセス70に従って動作させるコンピュータプログラムが構成された機械可読記憶媒体として実施することができる。
【0047】
本明細書において述べたプロセスは、本明細書において述べた特定の実施形態に限定されない。たとえば、プロセスは図3〜図5の特定の処理順に限定されない。むしろ、図3〜図5の任意のブロックは、上記結果を達成するように必要に応じて順番を変更してもよく、結合してもよく、又は除去してもよい。
【0048】
本明細書において述べたシステムは、上述したハードウェア及びソフトウェアとの併用に限定されない。システムは、デジタル電子回路、コンピュータハードウェア、ファームウェア、ソフトウェア、又はこれらの組み合わせで実施してもよい。
【0049】
システムの実施に関連する方法ステップは、1つ又は複数のコンピュータプログラムを実行してシステムの機能を実行する1つ又は複数のプログラマブルプロセッサによって実行することができる。システムのすべて又は一部は、特定用途向け論理回路(たとえば、FPGA(フィールドプログラマブルゲートアレイ)及び/又はASIC(特定用途向け集積回路)として実装することができる。
【0050】
コンピュータプログラムの実行に適したプロセッサとしては、例として、汎用マイクロプロセッサ及び特定用途向けマイクロプロセッサの両方並びに任意の種類のデジタルコンピュータのうちの任意の1つ又は複数のプロセッサが含まれる。一般に、プロセッサは、読み取り専用メモリ又はランダムアクセスメモリ又はこれらの両方から命令及びデータを受け取る。コンピュータの要素としては、命令を実行するプロセッサ並びに命令及びデータを記憶する1つ又は複数のメモリ装置が含まれる。
【0051】
システムは、本明細書において述べた具体例に限定されない。たとえば、本明細書において述べたシステムは衛星ナビゲーションシステム内にあるが、ナビゲーション性能の評価を必要とする任意のナビゲーションシステム内でシステムを使用してもよい。
【0052】
本明細書において述べた異なる実施形態の要素を組み合わせて、特に上述しなかった他の実施形態を形成することが可能である。本明細書において特に述べられていない他の実施形態も特許請求の範囲に含まれる。
【図面の簡単な説明】
【0053】
【図1】ナビゲーション環境の概略図である。
【図2】ナビゲーション監視・予測システムの概略図である。
【図3】ナビゲーション補強システムの性能を監視し予測するプロセスのフローチャートである。
【図4】ナビゲーション補強システムを長期監視するプロセスのフローチャートである。
【図5】ナビゲーション補強システムを短期監視するプロセスのフローチャートである。
【図6】図3のプロセスを実装することができるコンピュータシステムのブロック図である。
【特許請求の範囲】
【請求項1】
ナビゲーション補強システムの予測性能を決定する方法であって、
前記ナビゲーション補強システムの標準性能を決定し、
前記標準性能の決定に基づいて、第2の時間間隔中の前記ナビゲーション補強システムの予測性能を決定する、
ことを含む方法。
【請求項2】
前記標準性能の決定は、現在のインテグリティ値を記憶することを含む、請求項1に記載の方法。
【請求項3】
前記標準性能の決定は、前記現在のインテグリティ値を標準インテグリティ値と比較することを含む、請求項2に記載の方法。
【請求項4】
前記標準インテグリティ値は、将来時に再現性のある前記補強システムの過去の性能を表す値を含む、請求項3に記載の方法。
【請求項5】
前記標準性能の決定は、
前記現在のインテグリティ値が前記標準インテグリティ値から偏倚しているか否かを判断し、及び
前記現在のインテグリティ値が前記標準インテグリティ値から偏倚している場合、前記標準インテグリティ値を更新する、
ことを含む、請求項4に記載の方法。
【請求項6】
前記標準性能の決定は、前記現在のインテグリティ値が前記標準インテグリティ値から再現性のあるパターンで偏倚しているか否かを判断することを含む、請求項5に記載の方法。
【請求項7】
前記予測性能の決定は、
受信した前記現在のインテグリティ値を標準インテグリティ値と比較し、
偏倚が存在するか否かを判断する、
ことを含む、請求項2に記載の方法。
【請求項8】
前記予測性能の決定は、前記偏倚の大きさ予測及び持続時間予測を反映する調整データを生成することを含む、請求項7に記載の方法。
【請求項9】
スケジュールされた衛星非可用性を記憶することをさらに含む、請求項1に記載の方法。
【請求項10】
ナビゲーション補強システムの予測性能を決定するシステムであって、
前記ナビゲーション補強システムの標準性能を決定する長期モニタと、
前記ナビゲーション補強システムの前記標準性能に基づいて前記ナビゲーション補強システムの予測性能を決定する短期モニタと、
を備えるシステム。
【請求項11】
前記長期モニタは現在のインテグリティ値を生成する、請求項10に記載のシステム。
【請求項12】
前記長期モニタは前記現在のインテグリティ値を標準インテグリティ値と比較する、請求項11に記載のシステム。
【請求項13】
前記標準インテグリティ値は、将来時に再現性のある前記補強システムの過去の性能を表す値を含む、請求項12に記載のシステム。
【請求項14】
前記長期モニタは、前記現在のインテグリティ値が前記標準インテグリティ値から偏倚しているか否かを判断し、現在のインテグリティ値が標準インテグリティ値から偏倚している場合、標準インテグリティ値を更新する、請求項13に記載のシステム。
【請求項15】
前記長期モニタは、前記現在のインテグリティ値が前記標準インテグリティ値から再現性のあるパターンで偏倚している場合、標準インテグリティ値を更新する、請求項14に記載のシステム。
【請求項16】
前記短期モニタは、受信する前記現在のインテグリティ値を標準インテグリティ値と比較し、偏倚が存在するか否かを判断する、請求項11に記載のシステム。
【請求項17】
前記短期モニタは、前記偏倚の大きさ予測及び持続時間予測を反映する調整データを生成する、請求項16に記載のシステム。
【請求項18】
衛星の位置を決定し、該衛星の位置を前記長期モニタに提供する衛星予測モジュールであって、スケジュールされた衛星非可用性データベースを含む、衛星予測モジュールをさらに備える、請求項10に記載のシステム。
【請求項19】
ナビゲーション補強システムの予測性能を決定するための実行可能な命令を記憶している機械可読媒体を含む物品であって、前記命令は、機械に、
前記ナビゲーション補強システムの標準性能を決定し、
前記標準性能の決定に基づいて、第2の時間間隔中の前記ナビゲーション補強システムの予測性能を決定する、
ことを実行させる物品。
【請求項20】
機械に前記標準性能の決定を実行させる前記命令は、機械に、前記現在のインテグリティ値を標準インテグリティ値と比較することを実行させる命令を含む、請求項19に記載の物品。
【請求項21】
前記標準インテグリティ値は、将来時に再現性のある前記補強システムの過去の性能を表す値を含む、請求項20に記載の物品。
【請求項22】
機械に前記標準性能の決定を実行させる前記命令は、機械に、
前記現在のインテグリティ値が前記標準インテグリティ値から偏倚しているか否かを判断し、
前記現在のインテグリティ値が前記標準インテグリティ値から偏倚している場合、標準インテグリティ値を更新する、
ことを実行させる命令を含む、請求項21に記載の物品。
【請求項23】
機械に前記標準性能の決定を実行させる前記命令は、機械に、前記現在のインテグリティ値が前記標準インテグリティ値から再現性のあるパターンで偏倚しているか否かを判断することを実行させる命令を含む、請求項22に記載の物品。
【請求項24】
機械に前記予測性能の決定を実行させる前記命令は、機械に、前記現在のインテグリティ値と前記標準インテグリティ値との間に偏倚が存在するか否かを判断することを実行させる命令を含む、請求項20に記載の物品。
【請求項25】
機械に前記予測性能の決定を実行させる前記命令は、機械に、前記偏倚の大きさ予測及び持続時間予測を反映する調整データを生成することを実行させる命令を含む、請求項24に記載の物品。
【請求項1】
ナビゲーション補強システムの予測性能を決定する方法であって、
前記ナビゲーション補強システムの標準性能を決定し、
前記標準性能の決定に基づいて、第2の時間間隔中の前記ナビゲーション補強システムの予測性能を決定する、
ことを含む方法。
【請求項2】
前記標準性能の決定は、現在のインテグリティ値を記憶することを含む、請求項1に記載の方法。
【請求項3】
前記標準性能の決定は、前記現在のインテグリティ値を標準インテグリティ値と比較することを含む、請求項2に記載の方法。
【請求項4】
前記標準インテグリティ値は、将来時に再現性のある前記補強システムの過去の性能を表す値を含む、請求項3に記載の方法。
【請求項5】
前記標準性能の決定は、
前記現在のインテグリティ値が前記標準インテグリティ値から偏倚しているか否かを判断し、及び
前記現在のインテグリティ値が前記標準インテグリティ値から偏倚している場合、前記標準インテグリティ値を更新する、
ことを含む、請求項4に記載の方法。
【請求項6】
前記標準性能の決定は、前記現在のインテグリティ値が前記標準インテグリティ値から再現性のあるパターンで偏倚しているか否かを判断することを含む、請求項5に記載の方法。
【請求項7】
前記予測性能の決定は、
受信した前記現在のインテグリティ値を標準インテグリティ値と比較し、
偏倚が存在するか否かを判断する、
ことを含む、請求項2に記載の方法。
【請求項8】
前記予測性能の決定は、前記偏倚の大きさ予測及び持続時間予測を反映する調整データを生成することを含む、請求項7に記載の方法。
【請求項9】
スケジュールされた衛星非可用性を記憶することをさらに含む、請求項1に記載の方法。
【請求項10】
ナビゲーション補強システムの予測性能を決定するシステムであって、
前記ナビゲーション補強システムの標準性能を決定する長期モニタと、
前記ナビゲーション補強システムの前記標準性能に基づいて前記ナビゲーション補強システムの予測性能を決定する短期モニタと、
を備えるシステム。
【請求項11】
前記長期モニタは現在のインテグリティ値を生成する、請求項10に記載のシステム。
【請求項12】
前記長期モニタは前記現在のインテグリティ値を標準インテグリティ値と比較する、請求項11に記載のシステム。
【請求項13】
前記標準インテグリティ値は、将来時に再現性のある前記補強システムの過去の性能を表す値を含む、請求項12に記載のシステム。
【請求項14】
前記長期モニタは、前記現在のインテグリティ値が前記標準インテグリティ値から偏倚しているか否かを判断し、現在のインテグリティ値が標準インテグリティ値から偏倚している場合、標準インテグリティ値を更新する、請求項13に記載のシステム。
【請求項15】
前記長期モニタは、前記現在のインテグリティ値が前記標準インテグリティ値から再現性のあるパターンで偏倚している場合、標準インテグリティ値を更新する、請求項14に記載のシステム。
【請求項16】
前記短期モニタは、受信する前記現在のインテグリティ値を標準インテグリティ値と比較し、偏倚が存在するか否かを判断する、請求項11に記載のシステム。
【請求項17】
前記短期モニタは、前記偏倚の大きさ予測及び持続時間予測を反映する調整データを生成する、請求項16に記載のシステム。
【請求項18】
衛星の位置を決定し、該衛星の位置を前記長期モニタに提供する衛星予測モジュールであって、スケジュールされた衛星非可用性データベースを含む、衛星予測モジュールをさらに備える、請求項10に記載のシステム。
【請求項19】
ナビゲーション補強システムの予測性能を決定するための実行可能な命令を記憶している機械可読媒体を含む物品であって、前記命令は、機械に、
前記ナビゲーション補強システムの標準性能を決定し、
前記標準性能の決定に基づいて、第2の時間間隔中の前記ナビゲーション補強システムの予測性能を決定する、
ことを実行させる物品。
【請求項20】
機械に前記標準性能の決定を実行させる前記命令は、機械に、前記現在のインテグリティ値を標準インテグリティ値と比較することを実行させる命令を含む、請求項19に記載の物品。
【請求項21】
前記標準インテグリティ値は、将来時に再現性のある前記補強システムの過去の性能を表す値を含む、請求項20に記載の物品。
【請求項22】
機械に前記標準性能の決定を実行させる前記命令は、機械に、
前記現在のインテグリティ値が前記標準インテグリティ値から偏倚しているか否かを判断し、
前記現在のインテグリティ値が前記標準インテグリティ値から偏倚している場合、標準インテグリティ値を更新する、
ことを実行させる命令を含む、請求項21に記載の物品。
【請求項23】
機械に前記標準性能の決定を実行させる前記命令は、機械に、前記現在のインテグリティ値が前記標準インテグリティ値から再現性のあるパターンで偏倚しているか否かを判断することを実行させる命令を含む、請求項22に記載の物品。
【請求項24】
機械に前記予測性能の決定を実行させる前記命令は、機械に、前記現在のインテグリティ値と前記標準インテグリティ値との間に偏倚が存在するか否かを判断することを実行させる命令を含む、請求項20に記載の物品。
【請求項25】
機械に前記予測性能の決定を実行させる前記命令は、機械に、前記偏倚の大きさ予測及び持続時間予測を反映する調整データを生成することを実行させる命令を含む、請求項24に記載の物品。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公表番号】特表2008−524596(P2008−524596A)
【公表日】平成20年7月10日(2008.7.10)
【国際特許分類】
【出願番号】特願2007−546939(P2007−546939)
【出願日】平成17年12月15日(2005.12.15)
【国際出願番号】PCT/US2005/045613
【国際公開番号】WO2006/086071
【国際公開日】平成18年8月17日(2006.8.17)
【出願人】(390039147)レイセオン・カンパニー (149)
【氏名又は名称原語表記】Raytheon Company
【Fターム(参考)】
【公表日】平成20年7月10日(2008.7.10)
【国際特許分類】
【出願日】平成17年12月15日(2005.12.15)
【国際出願番号】PCT/US2005/045613
【国際公開番号】WO2006/086071
【国際公開日】平成18年8月17日(2006.8.17)
【出願人】(390039147)レイセオン・カンパニー (149)
【氏名又は名称原語表記】Raytheon Company
【Fターム(参考)】
[ Back to top ]