
ナビゲーションシステム及びナビゲーション方法
【課題】鳥瞰図により地図表示を行い、視認性、利便性の向上を図る。
【解決手段】ナビゲーション処理部3が、現在位置検出部2で検出される移動体の現在位置から所定の距離の範囲内に存在するランドマークを検出し、現在位置とランドマークとを含む地図範囲を特定する。鳥瞰図データ作成部4は、ランドマークが周囲の地物によって遮られることのない高い見下し視点から移動体の移動方向の地図を見た状態の鳥瞰図データDmapを作成し、鳥瞰図データDmapに基づいて表示部9に鳥瞰図を地図表示させる。
【解決手段】ナビゲーション処理部3が、現在位置検出部2で検出される移動体の現在位置から所定の距離の範囲内に存在するランドマークを検出し、現在位置とランドマークとを含む地図範囲を特定する。鳥瞰図データ作成部4は、ランドマークが周囲の地物によって遮られることのない高い見下し視点から移動体の移動方向の地図を見た状態の鳥瞰図データDmapを作成し、鳥瞰図データDmapに基づいて表示部9に鳥瞰図を地図表示させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、鳥瞰図により地図表示を行うナビゲーションシステム及びナビゲーション方法に関する。
【背景技術】
【0002】
携帯電話やカーナビゲーション装置に設けられたナビゲーションシステムでは、例えば出発地から目的地までの経路(推奨経路)を案内する際、推奨経路と周辺の地物を鳥瞰図(俯瞰図)にて地図表示するものが知られている(特開2005−017052号公報、図6、図7等を参照)。
【0003】
また、単に鳥瞰図表示を行うと、現在位置から移動方向に在る経路が建物の蔭に隠れてしまい、視認性が悪くなる場合があるため、経路が画面手前となり建物が経路の背面側に表示されるように、鳥瞰図を適宜に回転させて表示する方法が提案されている(特開2004−233333号公報、図2等を参照)。
【0004】
更に、移動方向に在る経路が建物の蔭に隠れる状態になると、鳥瞰図表示を止め、平面地図や平面鳥瞰図(鳥瞰図から立体的な建物等を省略した図)に切り替え表示することで、経路と現在位置を視認しやすくすることも提案されている(特開2006−317503号公報、図2等を参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−017052号公報
【特許文献2】特開2004−233333号公報
【特許文献3】特開2006−317503号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、特許文献2と3に開示されている発明は、特許文献1に開示されている一般的な鳥瞰図表示における問題点を改善するものとして奏功するものと言えるが、次のような問題があった。
【0007】
まず、特許文献2に開示されている発明では、移動方向に在る経路が曲がっていて、周辺に高い建物等が存在しているような場合、経路を優先的に表示画面の手前側に表示させるなるために鳥瞰図の方位を適宜回転させるため、ユーザにとって如何なる方位に進行しているのか判りにくなってしまい、利便性等の点で問題があった。
【0008】
特許文献3に開示されている発明では、鳥瞰図表示を行っている際に移動方向に在る経路が建物の蔭に隠れる状態になると、鳥瞰図表示を止めて、平面地図や平面鳥瞰図に切り替え表示することとなるため、地図の表示形態が変化し、映像の連続性が失われてしまう。このため、ユーザにとって見難く、また、新たに切り替わった地図を理解するための負担が増す等の問題を招き、視認性や利便性等の点で問題があった。
【0009】
本発明は、こうした従来の問題点に鑑みて成されたものであり、鳥瞰図により地図表示を行い、より視認性、利便性の向上を図ることを可能にするナビゲーションシステムとナビゲーション方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
請求項1に記載の発明は、鳥瞰図より移動体の移動経路を地図表示するナビゲーションシステムであって、移動体の現在位置を検出する現在地検出手段と、前記移動経路上の現在位置付近の交差点の地図を鳥瞰図により地図表示するための鳥瞰図データを作成する鳥瞰図データ作成手段と、前記鳥瞰図データに基づいて、鳥瞰図による地図表示を行う表示手段とを、備え、前記鳥瞰図データ作成手段は、前記鳥瞰図データを作成するに際して、現在位置と前記移動経路上の交差点までの距離が所定距離離れているとき、前記交差点の地図を鳥瞰図より表示し、現在位置と前記移動経路上の交差点までの距離が所定距離以内のとき、前記交差点の地図の前記鳥瞰図上にランドマークを表示すること、を特徴とする。
また、請求項5に記載の発明は、鳥瞰図より移動体の移動経路を地図表示するナビゲーション方法であって、移動体の現在位置を検出する現在地検出工程と、前記移動経路上の現在位置付近の交差点の地図を鳥瞰図により地図表示するための鳥瞰図データを作成する鳥瞰図データ作成工程と、前記鳥瞰図データに基づいて、鳥瞰図による地図表示を行う表示工程とを、を備え、前記鳥瞰図データ作成工程は、前記鳥瞰図データを作成するに際して、現在位置と前記移動経路上の交差点までの距離が所定距離離れているとき、前記交差点の地図を鳥瞰図より表示し、現在位置と前記移動経路上の交差点までの距離が所定距離以内のとき、前記交差点の地図の前記鳥瞰図上にランドマークを表示することを特徴とする。
【図面の簡単な説明】
【0011】
【図1】実施形態に係るナビゲーションシステムの構成を示すブロック図である。
【図2】鳥瞰図データを作成する際の動作原理を説明するための説明図である。
【図3】図1に示したナビゲーションシステムの動作を説明するためのフローチャートである。
【図4】移動体が移動する際の平面地図を示した図である。
【図5】鳥瞰図の一例を示す図である。
【図6】更に、鳥瞰図の一例を示す図である。
【図7】更に、鳥瞰図の一例を示す図である。
【図8】鳥瞰図データを作成する際の他の動作原理を説明するための説明図である。
【発明を実施するための形態】
【0012】
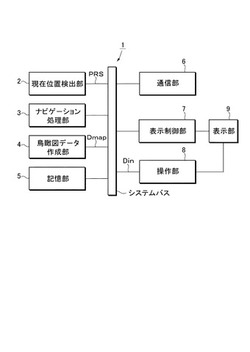
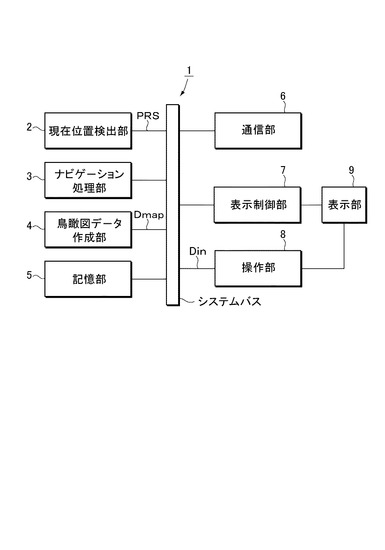
本発明の好適な実施形態について図面を参照して説明する。図1は、本実施形態のナビゲーションシステムの基本構成を表したブロック図である。
【0013】
図1において、このナビゲーションシステム1は、現在位置検出部2、ナビゲーション処理部3、鳥瞰図データ作成部4、記憶部5、通信部6、表示制御部7、操作部8、表示部9を備えて構成され、図示しないマイクロプロセッサ(MPU)による制御の下で動作する所謂コンピュータシステム構成で実現されている。そして、ナビゲーションシステム1は、例えばカーナビゲーション装置や、携帯電話、マイクロコンピュータ、PDA(Personal Digital Assistant:携帯情報端末)等の移動体に内蔵または搭載されるようになっている。
【0014】
通信部6は、図示しない地図情報配信センタからインターネット等の通信ネットワークを介して配信されてくる地図データ(時空間地理情報)を受信してダウンロードし、その地図データを記憶部5に記憶させる。また、図示しないが、ナビゲーションシステム1は、DVDやCD、メモリカード等の記録媒体に記憶されている地図データを読み取る情報読取装置を備え、情報読取装置で読み取った地図データを記憶部5にダウンロード記憶させることも可能となっている。
【0015】
なお、上述の地図データ(時空間地理情報)は、例えばKIWIで代表される時空間データベース構造の地図データである。時空間データベース構造の地図データについては、多くの文献にて紹介されていることからその詳細な説明を割愛し、概要を説明することとすると、地図データは、詳細道路データ(詳細な道路の経路等を示すデータ)、詳細背景データ(詳細な道路の地図背景を描画等するための画像データ)、概要地図データ(地図の縮尺に応じて情報量が最適化された道路データと背景データとを有するデータ)、道路ネットワークデータ(主要道路の経路等を示すデータ)、場所検索データ(アルファベット検索や電話番号検索等によって、建物や道路等の地物の場所や名称等を検索するための検索データ)、サービス検索データ(店舗、レストラン、公共施設等におけるサービスを検索するための検索データ)、メタデータ(ナビゲーションシステムの動作条件を設定するための共通データと、検索データの記述構造を規定したり検索データの内容を定義するための属性定義データ)を備えて構成されている。
【0016】
また、建物の位置、高さ、敷地面積等の情報が、メタデータの属性定義データに含まれており、その属性定義データと詳細背景データとが関連付けられる。このため、鳥瞰図データ作成部4が鳥瞰図データDmapを作成する際に属性定義データを調べ、ランドマークの高さや敷地面積を設定したり、その他の建物の高さや敷地面積を設定することが可能となっている。
【0017】
操作部8は、ユーザが所望の操作指令を入力するための操作スイッチや操作キーが設けられており、操作指令された内容を示す操作データDinを出力する。
【0018】
記憶部5は、ハードディスクドライブ(HDD)や、SDRAM、フラッシュROM等の記憶媒体を備えて構成されており、記憶媒体に上述の地図データを記憶する他、操作データDinを記憶する。更に、記憶部5は、現在位置検出部2が移動体の現在位置を検出して現在位置データPRSを生成する際の作業領域、ナビゲーション処理部3が推奨経路を探索して推奨経路データBRDを生成する際の作業領域、鳥瞰図データ作成部4が鳥瞰図データDmapを作成する際の作業領域ともなっており、各部2,3,4の処理に従って、現在位置データPRSと推奨経路データBRDと鳥瞰図データDmapを記憶する等の処理を行う。
【0019】
表示制御部7は、鳥瞰図データ作成部4で作成される鳥瞰図データDmapに基づいて映像データを生成し、その映像データによって、タッチパネル型の液晶表示装置等から成る表示装置9に、鳥瞰図の地図を表示させる。
【0020】
更に、表示制御部7は、表示装置9の画面に鳥瞰図を地図表示させる他、画面内の所定の表示領域にメニューを表示させ、そのメニューをユーザがタッチ操作すると、操作部8を操作した場合と同等の操作指令を入力することができるようになっている。
【0021】
現在位置検出部2は、内蔵されているGPS(Global Positioning System)受信機や自律航法センサ等を用いて、所定時間毎に移動体の現在位置を検出し、現在位置を示す現在位置データPRSを生成して出力する。
【0022】
ナビゲーション処理部3は、推奨経路をルート探索して案内するナビゲーション処理と、交差点の周辺に存在するランドマークを検索する検索処理と、表示部9に地図表示させるための地図範囲を特定するためのクリッピング処理を行う。
【0023】
つまり、ユーザが操作部8の操作により出発地Sと目的地Gを指定してナビゲーション開始の指示を行うと、ナビゲーション処理部3は、その指定された出発地Sから目的地Gまでの推奨経路をルート探索し、ルート探索した推奨経路に沿って移動体を案内するナビゲーション処理を行う。
【0024】
ここで、ナビゲーション処理部3は、記憶部5に記憶されている出発地Sから目的地Gまでの経路を含む地図データを利用して、マップマッチング等の処理を行って、出発地Sから目的地Gまでの推奨経路をルート探索し、その推奨経路を示す推奨経路データBRDを生成する。更に、推奨経路データBRDに基づいて表示部9に推奨経路を表示させる際、現在位置検出部2から所定時間毎に出力される現在位置データPRSに基づいて、推奨経路上の移動体の現在位置Qiと移動方向を検出し、移動体の移動中の経路上に存在し現在位置Qiから最も近い交差点までの距離を検出する。そして、最も近い交差点までの距離が所定の距離L1以内となると、その交差点から所定距離L2以内の範囲内に存在しているランドマークを、記憶部5に記憶されている地図データを用いて検索処理し、現在位置Qiとランドマークとを含む移動方向の地図範囲を、記憶部5に記憶されている地図データを用いてクリッピングする。更に、そのクリッピング処理に際して、表示部9の画面に視認しやすい縮尺率の地図を表示させるための地図データを選択すると共に、表示部9の画面範囲に合わせて、地図データの地図範囲を特定する。また、ナビゲーション処理部3は、ナビゲーション処理に際して、上述した最も近い交差点までの距離が所定の距離L1より大きいときには、現在位置Qiを含み表示部9の画面に視認しやすい縮尺率の地図を表示させるための地図データを選択し、表示部9の画面範囲に合わせて地図データの地図範囲を特定する。つまり、最も近い交差点までの距離が所定の距離L1より大きいときには、積極的にランドマークを検索するための検索処理を行わずに地図範囲を特定する。このため、地図範囲内に偶然にランドマークが含まれる場合も生じるが、この場合にはランドマークが偶然に含まれた地図範囲を特定することになる。
【0025】
ユーザからナビゲーション開始の指示がなされず、ナビゲーション処理部3がナビゲーション処理を行わない場合には、次に述べる処理を行う。つまり、ナビゲーション処理部3は、現在位置検出部2から所定時間毎に出力される現在位置データPRSに基づいて、移動体の現在位置Qiと移動方向を検出し、移動体の移動中の経路上に存在し現在位置Qiから最も近い交差点までの距離を検出する。そして、最も近い交差点までの距離が所定の距離L1以内となると、その現在位置Qiから所定距離L2以内の範囲内に存在しているランドマークを、記憶部5に記憶されている地図データを用いて検索処理し、現在位置Qiとランドマークとを含む移動方向の地図範囲を、記憶部5に記憶されている地図データを用いてクリッピングする。更に、そのクリッピング処理に際して、表示部9の画面に視認しやすい縮尺率の地図を表示させるための地図データを選択すると共に、表示部9の画面範囲に合わせて、地図データの地図範囲を特定する。また、最も近い交差点までの距離が所定の距離L1より大きいときには、現在位置Qiを含み表示部9の画面に視認しやすい縮尺率の地図を表示させるための地図データを選択し、表示部9の画面範囲に合わせて地図データの地図範囲を特定する。つまり、最も近い交差点までの距離が所定の距離L1より大きいときには、積極的にランドマークを検索するための検索処理を行わずに地図範囲を特定する。このため、地図範囲内に偶然にランドマークが含まれる場合も生じるが、この場合にはランドマークが偶然に含まれた地図範囲を特定することになる。
【0026】
以上に説明したように、ナビゲーション処理部3は、ユーザがナビゲーション開始の指令をした場合とユーザがナビゲーション開始の指令をしない場合とのいずれの場合にも、時事刻々と変化する移動体の現在位置Qiと移動方向と視認しやすい縮尺率と表示部9の画面範囲に応じて地図データをクリッピングするのであるが、ユーザがナビゲーション開始の指令をした場合には、ルート探索した推奨経路に沿って移動する移動体の現在位置Qiと移動方向をクリッピングの条件に含めて地図データをクリッピングするのに対し、ユーザがナビゲーション開始の指令をしない場合には、推奨経路をルート探索しないことから、移動体の現在位置Qiと移動方向に応じて地図データをクリッピングする。そして更に、ユーザがナビゲーション開始の指令をした場合とユーザがナビゲーション開始の指令をしない場合とのいずれの場合にも、現在位置Qiから移動方向の最も近い交差点までの距離を検出し、その検出した距離が所定の距離L1以内となる場合に、その現在位置Qiから所定の距離L2の範囲内に存在するランドマークを検索し、検索したランドマークを含めて地図表示するための地図範囲を特定する。
【0027】
なお、上述の距離L1は、距離L2より小さな値に設定されている。例えば、距離L1は500m以内の比較的短い距離に予め設定され、距離L2は、例えば500m以上の比較的長い距離に決められている。
【0028】
鳥瞰図データ作成部4は、ナビゲーション処理部3によって特定(クリッピング)された地図データを記憶部5から取得し、その取得した地図データを三次元表示(3D表示)のデータに変換することにより、鳥瞰図の地図を表示するための鳥瞰図データDmapを作成する。つまり、表示対象である鳥瞰図の地図が表示部9の画面範囲内に収まり、移動体の現在位置Qiが画面のほぼ中央下側、現在位置Qiから移動方向前方の所定距離DSTの地図映像が画面上側に表示され、画面前方から後方に向かって奥行きを持った鳥瞰図をヘッディングアップ表示させるための鳥瞰図データDmapを作成する。
【0029】
更に詳細に述べると、ナビゲーション処理部3がナビゲーション処理を行うときには、鳥瞰図データ作成部4は、鳥瞰図内の出発地Sと目的地Gと推奨経路とを色違いによって背景の地図と識別するため、推奨経路データBRDに基づいて鳥瞰図データDmapに着色処理等を施す。更に、ナビゲーション処理部3がナビゲーション処理を行うときとナビゲーション処理を行わないときとの何れの場合にも、移動体の現在位置Qiを三角マーク等で表示するためのマークデータを鳥瞰図データDmapに含ませて作成する。更に、ナビゲーション処理部3がナビゲーション処理を行うときとナビゲーション処理を行わないときとの何れの場合であっても、移動体の現在位置Qiが上述した交差点から所定距離L1の範囲外のときには、鳥瞰図データを作成する際の見下し視点Esの高さを標準(ディフォルト)の高さHsに設定して鳥瞰図データDmapを作成し、移動体の現在位置Qiが上述した交差点から所定距離L1の範囲内のときには、鳥瞰図データを作成する際の見下し視点Euの高さを標準(ディフォルト)の高さHsより高い高さHuに設定して鳥瞰図データDmapを作成する。
【0030】
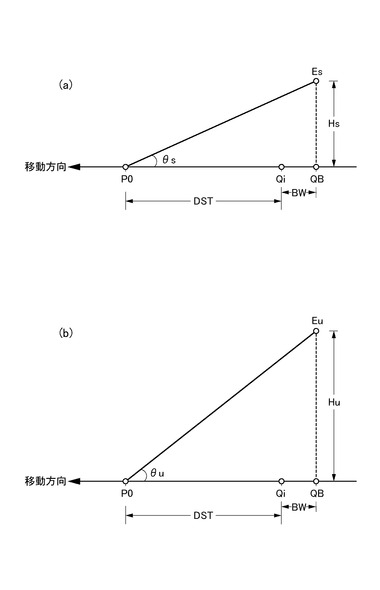
図2(a)は、見下し視点Esを標準(ディフォルト)の高さHsに設定して鳥瞰図データDmapを作成する際の処理(以下、「第1の処理」と称する)を説明するための説明図、図2(b)は、見下し視点Euを高さHuに設定して鳥瞰図データDmapを作成する際の処理(以下、「第2の処理」と称する)を説明するための説明図である。
【0031】
上述したように移動体の現在位置Qiが、交差点から所定距離L1の範囲外のときには、鳥瞰図データ作成部4は第1の処理を行い、図2(a)に示すように、現在位置Qiから移動方向前方の所定距離DSTに在る位置P0と、現在位置Qiから移動方向後方の所定距離BWに在る位置QBを設定し、位置QBより高さHsの位置を見下し視点Esに設定する。ここで、距離BWは、予め10m程度の所定の距離に決められている。距離DSTは鳥瞰図データ作成部4が決定し、鳥瞰図データDmapを作成する際の地図の縮尺率に応じて、表示部9の画面範囲に合わせて鳥瞰図を表示させるための距離に決定する。そして、見下し視点Esから移動方向に在る位置P0を見たときの俯角θsに従って、ナビゲーション処理部3によって特定(クリッピング)された地図データを三次元表示(3D表示)のデータに変換することにより、表示部9の画面前方から後方に向かって奥行きを持った鳥瞰図を地図表示するための鳥瞰図データDmapを作成する。このように、鳥瞰図データ作成部4が第1の処理によって鳥瞰図データDmapを作成すると、移動体より後方に在る見下し視点Esから移動方向を見た場合の鳥瞰図を表示部9にて地図表示させることが可能となる。更に、移動体より後方に在る見下し視点Esから移動方向を見た場合の鳥瞰図が地図表示されることで、ユーザにとって視認性の良い地図を提供することができる。更に、見下し視点Esが移動体より後方に位置するため、臨場感や広い視界を感じさせる地図表示を行うことができ、視認性や利便性の向上を図ることができる。
【0032】
上述したように移動体の現在位置Qiが、交差点から所定距離L1の範囲内のときには、鳥瞰図データ作成部4は第2の処理を行い、図2(b)に示すように、現在位置Qiから移動方向前方の所定距離DSTに在る位置P0と、現在位置Qiから移動方向後方の所定距離BWに在る位置QBを設定し、位置QBより高さHuの位置を見下し視点Euに設定する。ここで、距離BWは、予め10m程度の所定の距離に決められている。距離DSTは鳥瞰図データ作成部4が決定し、鳥瞰図データDmapを作成する際の地図の縮尺率と、ナビゲーション処理部3が特定したランドマーク(上述した現在位置Qiから所定の距離L2の範囲内に存在するランドマーク)を含む地図範囲とに応じて、表示部9の画面範囲に合わせて鳥瞰図を表示させるための距離に決定する。更に、見下し視点Euの高さHuは、鳥瞰図データ作成部4が遠近法による幾何学原理を用いた演算処理によって決定し、見下し視点Euから位置P0を見下して鳥瞰図を見た場合に、ナビゲーション処理部3が特定した上述のランドマークが周囲の建物に隠れることなく視認することができる高さHuに決定する。このように、鳥瞰図データ作成部4が第2の処理によって鳥瞰図データDmapを作成すると、移動体より後方に在る見下し視点Euから移動方向を見た場合の鳥瞰図を表示部9にて地図表示させることが可能となり、更に、移動体が交差点近傍を移動中に、ランドマークを視認することが可能な鳥瞰図を地図表示させることができる。更に、移動体より後方に在る見下し視点Euから移動方向を見た場合の鳥瞰図が地図表示されることで、ユーザにとって視認性の良い地図を提供することができる。更に、見下し視点Euが移動体より後方に位置するため、臨場感や広い視界を感じさせる地図表示を行うことができ、視認性や利便性の向上を図ることができる。
【0033】
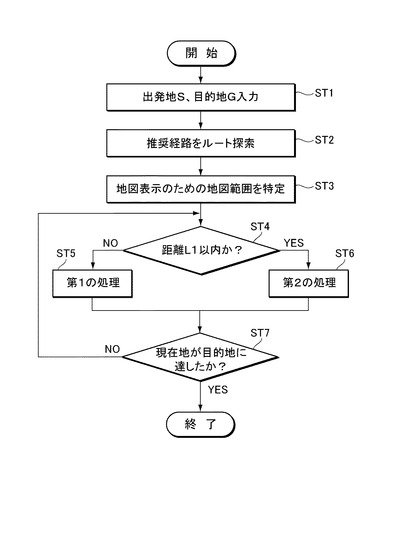
次に、かかる構成を有するナビゲーションシステム1の動作について、図4〜図7を参照して説明する。図3は、ナビゲーションシステム1の動作を示すフローチャートである。
【0034】
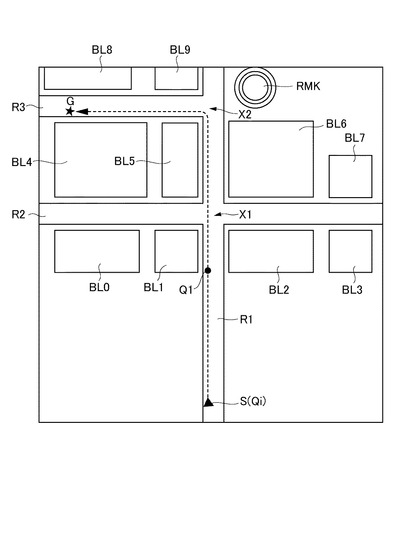
なお、説明の便宜上、図4に例示する平面地図において、出発地Sから交差点X1,X2を通り目的地Gに到達する推奨経路に沿って、ナビゲーションシステム1を搭載した自動車(移動体)が移動するものとして、ナビゲーションシステム1の動作について説明する。また、図4の平面地図には、交差点X1で交差する道路(経路)R1,R2と、交差点X2で道路R1に交差する道路R3と、建物BL0〜BL9と、ランドマークである建物RMKが示されている。
【0035】
図3において、ユーザが操作部8の操作により、表示部9に表示されたメニュー等に従って出発地Sと目的地Gの位置を入力してルート探索開始の指示をすると、その出発地Sと目的地Gとの位置情報(緯度、経度の情報)等を有する操作データDinが操作部8からナビゲーション処理部3に供給される(ステップST1)。
【0036】
次に、ステップST2において、ナビゲーション処理部3がナビゲーション処理を開始し、操作データDinの指示に従って出発地Sから目的地Gまでの推奨経路をルート探索し、推奨経路データBRDを生成する。
【0037】
次に、ステップST3において、ナビゲーション処理部3が交差点X1,X2の周辺に存在するランドマークを検索する検索処理と、表示部9に推奨経路と背景地図を地図表示させるための地図範囲を特定するためのクリッピング処理を行う。
【0038】
次に、ステップST4において、ナビゲーション処理部3が、現在位置検出部2で検出される移動体の現在位置Qi(現在位置Qiが出発地Sと同じ位置のときには、出発地S)と交差点X1との間の距離が所定の距離L1以内であるか検出し、現在位置Qiと交差点X1との間の距離が距離L1を超えている場合にはステップST5、現在位置Qiと交差点X1との間の距離が距離L1以内の場合にはステップST6へ移行する。
【0039】
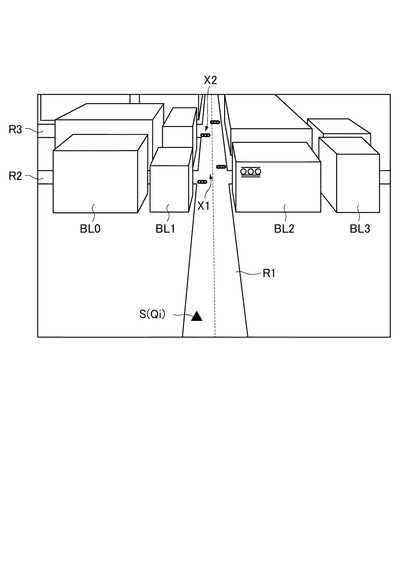
次に、ステップST5では、鳥瞰図データ作成部4が上述した第1の処理を行い、高さHsの見下し視点Esから見た状態の鳥瞰図を地図表示するための鳥瞰図データDmapを生成し、更に、表示制御部7がその鳥瞰図データDmapに基づいて表示部9に鳥瞰図を地図表示させる。つまり、出発地Sである現在位置Qiと交差点X1との間の距離が距離L1を超えている場合には、図5に示すような、比較的低い見下し視点Esから見た状態(ユーザの視点に立って移動体から見た状態)の鳥瞰図が地図表示される。そして、ステップST7において、現在位置Qiが目的地Gに到達したか否かの判断をナビゲーション処理部3が行い、到達していない場合にはステップST4に戻って処理を繰り返す。
【0040】
そして、ステップST4に戻って処理を繰り返し、移動体が出発地Sから移動を開始し、上述のステップST4において、ナビゲーション処理部3が、現在位置検出部2で検出される移動体の現在位置Qiと交差点X1との間の距離が距離L1以内となったことを検出すると、ステップST6へ移行する。例えば、図4中に示す現在位置Q1が交差点X1から距離L1以内の地点である場合に、ステップST6に移行する。
【0041】
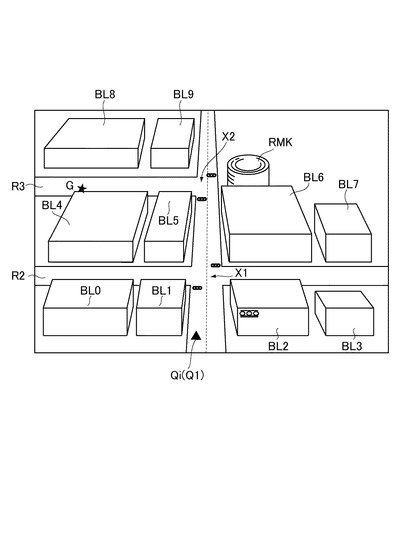
ステップST6では、鳥瞰図データ作成部4が上述した第2の処理を行い、高さHuの見下し視点Euから見た状態の鳥瞰図を地図表示するための鳥瞰図データDmapを生成し、更に、表示制御部7がその鳥瞰図データDmapに基づいて表示部9に鳥瞰図を地図表示させる。この第2の処理が行われると、図6に示すような、高所の見下し視点Euから見た状態の鳥瞰図が地図表示され、更に、交差点X1の周辺に存在する建物BL0〜BL3によって隠れていた道路R3を見えるようになり、更に、建物BL6によって隠れていたランドマークRMKである建物RMKが見えるようになる。そして、ステップST6からステップST7に移行し、現在位置Qiが目的地Gに到達したか否かの判断をナビゲーション処理部3が行い、到達していない場合にはステップST4に戻って処理を繰り返し、移動体が推奨経路に沿って移動し、交差点X1と現在位置Qiの間の距離が距離L1以内となっている期間中、時事刻々と変化する現在位置Qiを表示部9の画面の中央下側の所定位置に固定表示して、高さHuの見下し視点Euから見た状態の鳥瞰図が地図表示される。
【0042】
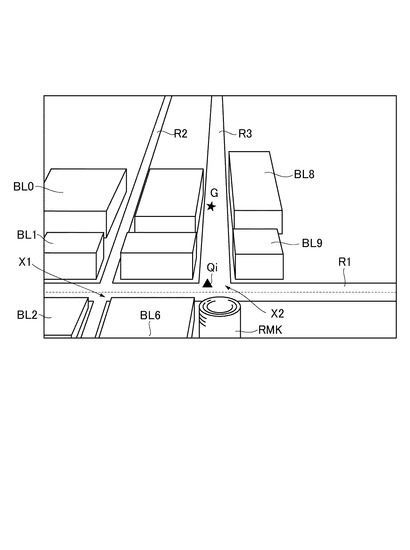
次に、移動体が交差点X2に近づき、ステップST4において、交差点X2と現在位置Qiとの間の距離が所定の距離L1以内となると、ステップST6において、鳥瞰図データ作成部4が第2の処理を行い、高さHuの見下し視点Euから見た状態の鳥瞰図を地図表示するための鳥瞰図データDmapを生成し、更に、表示制御部7がその鳥瞰図データDmapに基づいて表示部9に鳥瞰図を地図表示させる。そして、移動体が交差点X2で左折して道路R3側へ進路変更している間、図7に示すような、時事刻々と変化する現在位置Qiを表示部9の画面の中央下側の所定位置に固定して、高さHuの見下し視点Euから見た状態の鳥瞰図が地図表示され、見やすくなった交差点X2と道路R3をユーザが確認し、また、ランドマークRMKを目標にして、左折すべき交差点X2を見落とすことなく、目的地Gが在る道路R3の方向へ進路変更することが可能となる。
【0043】
そして、交差点X1から現在位置Qiまでの距離が距離L1を超えると、ステップST4からステップST5へ処理が移行し、高さHsの見下し視点Esから見た状態の鳥瞰図が表示部9にて地図表示され、更に、現在位置Qiが目的地Gに達すると、ナビゲーション処理が終了する。
【0044】
なお、ナビゲーション処理部3がナビゲーション処理を行う場合の、ナビゲーションシステム1の動作について説明したが、ナビゲーション処理部3がナビゲーション処理を行なわない場合には、ステップST1,ST2,ST7の処理はスキップされ、ステップST3において、ナビゲーション処理部3が交差点X1,X2の周辺に存在するランドマークを検索する検索処理と、表示部9に移動体の移動方向に存在する道路と背景地図を地図表示させるための地図範囲を特定するためのクリッピング処理を行って、ステップST4,ST5,ST6の処理が行われる。このように、ナビゲーション処理部3がナビゲーション処理を行なわない場合にも、図5〜図7に示したのと同様の鳥瞰図による地図表示が行われ、高所から見下ろして見やすくなった交差点や道路を表示したり、ユーザにとって目標にすることが可能なランドマークを表示することができる。
【0045】
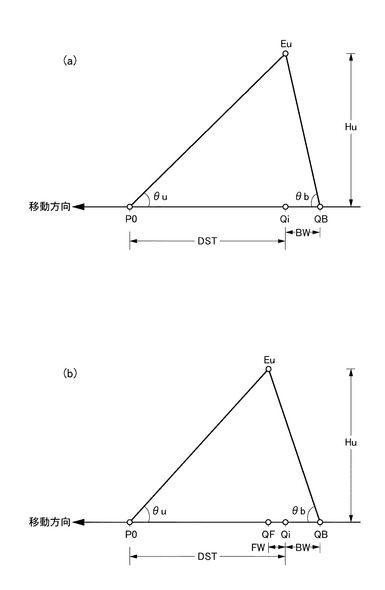
なお、以上に説明にした実施形態では、図3のステップST6において、鳥瞰図データ作成部4が図2(b)に示した動作原理に従って鳥瞰図データDmapを作成することとしているが、図8(a)に示す動作原理、又は図8(b)に示す動作原理に従って鳥瞰図データDmapを作成してもよい。
【0046】
つまり、図8(a)では、移動体の現在位置Qiの上方の高さHuの位置を、見下し視点Euに設定し、その見下し視点Euから移動体の移動方向前方の所定距離DSTの位置P0を見下した場合の俯角θuに従って、現在位置Qiより前方の鳥瞰図を表す鳥瞰図データを作成し、更に、見下し視点Euから移動体の現在位置Qiより後方の所定距離BWの位置QBを見下した場合の俯角θbに従って、現在位置Qiより後方の鳥瞰図を表す鳥瞰図データを作成し、両者の鳥瞰図データを合わせて鳥瞰図データDmapを作成する。そして、この鳥瞰図データDmapにより、表示部9の画面に鳥瞰図を地図表示させる。こうして鳥瞰図を表示させると、更に臨場感や広い視野を感じさせる地図を提供することができる。
【0047】
また、図8(b)では、移動体の現在位置Qiより距離FW(例えば10m程度)だけ前方の位置Qfを設定し、その位置Qfの上方の高さHuの位置を、見下し視点Euに設定する。更に、その見下し視点Euから移動体の移動方向前方の所定距離DSTの位置P0を見下した場合の俯角θuに従って、位置QFより前方の鳥瞰図を表す鳥瞰図データを作成し、更に、見下し視点Euから移動体の現在位置Qiより後方の所定距離BWの位置QBを見下した場合の俯角θbに従って、現在位置Qiより後方の鳥瞰図を表す鳥瞰図データを作成し、両者の鳥瞰図データを合わせて鳥瞰図データDmapを作成する。そして、この鳥瞰図データDmapにより、表示部9の画面に鳥瞰図を地図表示させる。こうして鳥瞰図を表示させる場合にも、更に臨場感や広い視野を感じさせる地図を提供することができる。
【0048】
また、鳥瞰図データ作成部4が鳥瞰図データDmapを作成する際、道路を非透明に表示し、道路の周辺の建物等の地物を半透明に表示するためのデータ処理を施して鳥瞰図データDmapを作成してもよい。また、道路を非透明に表示し、道路の周辺のランドマークを除いた建物等の地物を半透明に表示するためのデータ処理を施して鳥瞰図データDmapを作成してもよい。これらの変形例によっても、表示部9の画面上に、道路をより鮮明に表示させることができる。
【0049】
また、鳥瞰図データ作成部4が鳥瞰図データDmapを作成する際、ランドマークである建物に、そのランドマークの名称をテキスト表示等するための識別データを付加して作成してもよい。これにより、表示部9の画面上に、ランドマークである建物をより判りやすく表示させることができる。
【符号の説明】
【0050】
1 ナビゲーションシステム
2 現在位置検出部
3 ナビゲーション処理部
4 鳥瞰図データ作成部
7 表示制御部
9 表示部
【技術分野】
【0001】
本発明は、鳥瞰図により地図表示を行うナビゲーションシステム及びナビゲーション方法に関する。
【背景技術】
【0002】
携帯電話やカーナビゲーション装置に設けられたナビゲーションシステムでは、例えば出発地から目的地までの経路(推奨経路)を案内する際、推奨経路と周辺の地物を鳥瞰図(俯瞰図)にて地図表示するものが知られている(特開2005−017052号公報、図6、図7等を参照)。
【0003】
また、単に鳥瞰図表示を行うと、現在位置から移動方向に在る経路が建物の蔭に隠れてしまい、視認性が悪くなる場合があるため、経路が画面手前となり建物が経路の背面側に表示されるように、鳥瞰図を適宜に回転させて表示する方法が提案されている(特開2004−233333号公報、図2等を参照)。
【0004】
更に、移動方向に在る経路が建物の蔭に隠れる状態になると、鳥瞰図表示を止め、平面地図や平面鳥瞰図(鳥瞰図から立体的な建物等を省略した図)に切り替え表示することで、経路と現在位置を視認しやすくすることも提案されている(特開2006−317503号公報、図2等を参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−017052号公報
【特許文献2】特開2004−233333号公報
【特許文献3】特開2006−317503号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、特許文献2と3に開示されている発明は、特許文献1に開示されている一般的な鳥瞰図表示における問題点を改善するものとして奏功するものと言えるが、次のような問題があった。
【0007】
まず、特許文献2に開示されている発明では、移動方向に在る経路が曲がっていて、周辺に高い建物等が存在しているような場合、経路を優先的に表示画面の手前側に表示させるなるために鳥瞰図の方位を適宜回転させるため、ユーザにとって如何なる方位に進行しているのか判りにくなってしまい、利便性等の点で問題があった。
【0008】
特許文献3に開示されている発明では、鳥瞰図表示を行っている際に移動方向に在る経路が建物の蔭に隠れる状態になると、鳥瞰図表示を止めて、平面地図や平面鳥瞰図に切り替え表示することとなるため、地図の表示形態が変化し、映像の連続性が失われてしまう。このため、ユーザにとって見難く、また、新たに切り替わった地図を理解するための負担が増す等の問題を招き、視認性や利便性等の点で問題があった。
【0009】
本発明は、こうした従来の問題点に鑑みて成されたものであり、鳥瞰図により地図表示を行い、より視認性、利便性の向上を図ることを可能にするナビゲーションシステムとナビゲーション方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
請求項1に記載の発明は、鳥瞰図より移動体の移動経路を地図表示するナビゲーションシステムであって、移動体の現在位置を検出する現在地検出手段と、前記移動経路上の現在位置付近の交差点の地図を鳥瞰図により地図表示するための鳥瞰図データを作成する鳥瞰図データ作成手段と、前記鳥瞰図データに基づいて、鳥瞰図による地図表示を行う表示手段とを、備え、前記鳥瞰図データ作成手段は、前記鳥瞰図データを作成するに際して、現在位置と前記移動経路上の交差点までの距離が所定距離離れているとき、前記交差点の地図を鳥瞰図より表示し、現在位置と前記移動経路上の交差点までの距離が所定距離以内のとき、前記交差点の地図の前記鳥瞰図上にランドマークを表示すること、を特徴とする。
また、請求項5に記載の発明は、鳥瞰図より移動体の移動経路を地図表示するナビゲーション方法であって、移動体の現在位置を検出する現在地検出工程と、前記移動経路上の現在位置付近の交差点の地図を鳥瞰図により地図表示するための鳥瞰図データを作成する鳥瞰図データ作成工程と、前記鳥瞰図データに基づいて、鳥瞰図による地図表示を行う表示工程とを、を備え、前記鳥瞰図データ作成工程は、前記鳥瞰図データを作成するに際して、現在位置と前記移動経路上の交差点までの距離が所定距離離れているとき、前記交差点の地図を鳥瞰図より表示し、現在位置と前記移動経路上の交差点までの距離が所定距離以内のとき、前記交差点の地図の前記鳥瞰図上にランドマークを表示することを特徴とする。
【図面の簡単な説明】
【0011】
【図1】実施形態に係るナビゲーションシステムの構成を示すブロック図である。
【図2】鳥瞰図データを作成する際の動作原理を説明するための説明図である。
【図3】図1に示したナビゲーションシステムの動作を説明するためのフローチャートである。
【図4】移動体が移動する際の平面地図を示した図である。
【図5】鳥瞰図の一例を示す図である。
【図6】更に、鳥瞰図の一例を示す図である。
【図7】更に、鳥瞰図の一例を示す図である。
【図8】鳥瞰図データを作成する際の他の動作原理を説明するための説明図である。
【発明を実施するための形態】
【0012】
本発明の好適な実施形態について図面を参照して説明する。図1は、本実施形態のナビゲーションシステムの基本構成を表したブロック図である。
【0013】
図1において、このナビゲーションシステム1は、現在位置検出部2、ナビゲーション処理部3、鳥瞰図データ作成部4、記憶部5、通信部6、表示制御部7、操作部8、表示部9を備えて構成され、図示しないマイクロプロセッサ(MPU)による制御の下で動作する所謂コンピュータシステム構成で実現されている。そして、ナビゲーションシステム1は、例えばカーナビゲーション装置や、携帯電話、マイクロコンピュータ、PDA(Personal Digital Assistant:携帯情報端末)等の移動体に内蔵または搭載されるようになっている。
【0014】
通信部6は、図示しない地図情報配信センタからインターネット等の通信ネットワークを介して配信されてくる地図データ(時空間地理情報)を受信してダウンロードし、その地図データを記憶部5に記憶させる。また、図示しないが、ナビゲーションシステム1は、DVDやCD、メモリカード等の記録媒体に記憶されている地図データを読み取る情報読取装置を備え、情報読取装置で読み取った地図データを記憶部5にダウンロード記憶させることも可能となっている。
【0015】
なお、上述の地図データ(時空間地理情報)は、例えばKIWIで代表される時空間データベース構造の地図データである。時空間データベース構造の地図データについては、多くの文献にて紹介されていることからその詳細な説明を割愛し、概要を説明することとすると、地図データは、詳細道路データ(詳細な道路の経路等を示すデータ)、詳細背景データ(詳細な道路の地図背景を描画等するための画像データ)、概要地図データ(地図の縮尺に応じて情報量が最適化された道路データと背景データとを有するデータ)、道路ネットワークデータ(主要道路の経路等を示すデータ)、場所検索データ(アルファベット検索や電話番号検索等によって、建物や道路等の地物の場所や名称等を検索するための検索データ)、サービス検索データ(店舗、レストラン、公共施設等におけるサービスを検索するための検索データ)、メタデータ(ナビゲーションシステムの動作条件を設定するための共通データと、検索データの記述構造を規定したり検索データの内容を定義するための属性定義データ)を備えて構成されている。
【0016】
また、建物の位置、高さ、敷地面積等の情報が、メタデータの属性定義データに含まれており、その属性定義データと詳細背景データとが関連付けられる。このため、鳥瞰図データ作成部4が鳥瞰図データDmapを作成する際に属性定義データを調べ、ランドマークの高さや敷地面積を設定したり、その他の建物の高さや敷地面積を設定することが可能となっている。
【0017】
操作部8は、ユーザが所望の操作指令を入力するための操作スイッチや操作キーが設けられており、操作指令された内容を示す操作データDinを出力する。
【0018】
記憶部5は、ハードディスクドライブ(HDD)や、SDRAM、フラッシュROM等の記憶媒体を備えて構成されており、記憶媒体に上述の地図データを記憶する他、操作データDinを記憶する。更に、記憶部5は、現在位置検出部2が移動体の現在位置を検出して現在位置データPRSを生成する際の作業領域、ナビゲーション処理部3が推奨経路を探索して推奨経路データBRDを生成する際の作業領域、鳥瞰図データ作成部4が鳥瞰図データDmapを作成する際の作業領域ともなっており、各部2,3,4の処理に従って、現在位置データPRSと推奨経路データBRDと鳥瞰図データDmapを記憶する等の処理を行う。
【0019】
表示制御部7は、鳥瞰図データ作成部4で作成される鳥瞰図データDmapに基づいて映像データを生成し、その映像データによって、タッチパネル型の液晶表示装置等から成る表示装置9に、鳥瞰図の地図を表示させる。
【0020】
更に、表示制御部7は、表示装置9の画面に鳥瞰図を地図表示させる他、画面内の所定の表示領域にメニューを表示させ、そのメニューをユーザがタッチ操作すると、操作部8を操作した場合と同等の操作指令を入力することができるようになっている。
【0021】
現在位置検出部2は、内蔵されているGPS(Global Positioning System)受信機や自律航法センサ等を用いて、所定時間毎に移動体の現在位置を検出し、現在位置を示す現在位置データPRSを生成して出力する。
【0022】
ナビゲーション処理部3は、推奨経路をルート探索して案内するナビゲーション処理と、交差点の周辺に存在するランドマークを検索する検索処理と、表示部9に地図表示させるための地図範囲を特定するためのクリッピング処理を行う。
【0023】
つまり、ユーザが操作部8の操作により出発地Sと目的地Gを指定してナビゲーション開始の指示を行うと、ナビゲーション処理部3は、その指定された出発地Sから目的地Gまでの推奨経路をルート探索し、ルート探索した推奨経路に沿って移動体を案内するナビゲーション処理を行う。
【0024】
ここで、ナビゲーション処理部3は、記憶部5に記憶されている出発地Sから目的地Gまでの経路を含む地図データを利用して、マップマッチング等の処理を行って、出発地Sから目的地Gまでの推奨経路をルート探索し、その推奨経路を示す推奨経路データBRDを生成する。更に、推奨経路データBRDに基づいて表示部9に推奨経路を表示させる際、現在位置検出部2から所定時間毎に出力される現在位置データPRSに基づいて、推奨経路上の移動体の現在位置Qiと移動方向を検出し、移動体の移動中の経路上に存在し現在位置Qiから最も近い交差点までの距離を検出する。そして、最も近い交差点までの距離が所定の距離L1以内となると、その交差点から所定距離L2以内の範囲内に存在しているランドマークを、記憶部5に記憶されている地図データを用いて検索処理し、現在位置Qiとランドマークとを含む移動方向の地図範囲を、記憶部5に記憶されている地図データを用いてクリッピングする。更に、そのクリッピング処理に際して、表示部9の画面に視認しやすい縮尺率の地図を表示させるための地図データを選択すると共に、表示部9の画面範囲に合わせて、地図データの地図範囲を特定する。また、ナビゲーション処理部3は、ナビゲーション処理に際して、上述した最も近い交差点までの距離が所定の距離L1より大きいときには、現在位置Qiを含み表示部9の画面に視認しやすい縮尺率の地図を表示させるための地図データを選択し、表示部9の画面範囲に合わせて地図データの地図範囲を特定する。つまり、最も近い交差点までの距離が所定の距離L1より大きいときには、積極的にランドマークを検索するための検索処理を行わずに地図範囲を特定する。このため、地図範囲内に偶然にランドマークが含まれる場合も生じるが、この場合にはランドマークが偶然に含まれた地図範囲を特定することになる。
【0025】
ユーザからナビゲーション開始の指示がなされず、ナビゲーション処理部3がナビゲーション処理を行わない場合には、次に述べる処理を行う。つまり、ナビゲーション処理部3は、現在位置検出部2から所定時間毎に出力される現在位置データPRSに基づいて、移動体の現在位置Qiと移動方向を検出し、移動体の移動中の経路上に存在し現在位置Qiから最も近い交差点までの距離を検出する。そして、最も近い交差点までの距離が所定の距離L1以内となると、その現在位置Qiから所定距離L2以内の範囲内に存在しているランドマークを、記憶部5に記憶されている地図データを用いて検索処理し、現在位置Qiとランドマークとを含む移動方向の地図範囲を、記憶部5に記憶されている地図データを用いてクリッピングする。更に、そのクリッピング処理に際して、表示部9の画面に視認しやすい縮尺率の地図を表示させるための地図データを選択すると共に、表示部9の画面範囲に合わせて、地図データの地図範囲を特定する。また、最も近い交差点までの距離が所定の距離L1より大きいときには、現在位置Qiを含み表示部9の画面に視認しやすい縮尺率の地図を表示させるための地図データを選択し、表示部9の画面範囲に合わせて地図データの地図範囲を特定する。つまり、最も近い交差点までの距離が所定の距離L1より大きいときには、積極的にランドマークを検索するための検索処理を行わずに地図範囲を特定する。このため、地図範囲内に偶然にランドマークが含まれる場合も生じるが、この場合にはランドマークが偶然に含まれた地図範囲を特定することになる。
【0026】
以上に説明したように、ナビゲーション処理部3は、ユーザがナビゲーション開始の指令をした場合とユーザがナビゲーション開始の指令をしない場合とのいずれの場合にも、時事刻々と変化する移動体の現在位置Qiと移動方向と視認しやすい縮尺率と表示部9の画面範囲に応じて地図データをクリッピングするのであるが、ユーザがナビゲーション開始の指令をした場合には、ルート探索した推奨経路に沿って移動する移動体の現在位置Qiと移動方向をクリッピングの条件に含めて地図データをクリッピングするのに対し、ユーザがナビゲーション開始の指令をしない場合には、推奨経路をルート探索しないことから、移動体の現在位置Qiと移動方向に応じて地図データをクリッピングする。そして更に、ユーザがナビゲーション開始の指令をした場合とユーザがナビゲーション開始の指令をしない場合とのいずれの場合にも、現在位置Qiから移動方向の最も近い交差点までの距離を検出し、その検出した距離が所定の距離L1以内となる場合に、その現在位置Qiから所定の距離L2の範囲内に存在するランドマークを検索し、検索したランドマークを含めて地図表示するための地図範囲を特定する。
【0027】
なお、上述の距離L1は、距離L2より小さな値に設定されている。例えば、距離L1は500m以内の比較的短い距離に予め設定され、距離L2は、例えば500m以上の比較的長い距離に決められている。
【0028】
鳥瞰図データ作成部4は、ナビゲーション処理部3によって特定(クリッピング)された地図データを記憶部5から取得し、その取得した地図データを三次元表示(3D表示)のデータに変換することにより、鳥瞰図の地図を表示するための鳥瞰図データDmapを作成する。つまり、表示対象である鳥瞰図の地図が表示部9の画面範囲内に収まり、移動体の現在位置Qiが画面のほぼ中央下側、現在位置Qiから移動方向前方の所定距離DSTの地図映像が画面上側に表示され、画面前方から後方に向かって奥行きを持った鳥瞰図をヘッディングアップ表示させるための鳥瞰図データDmapを作成する。
【0029】
更に詳細に述べると、ナビゲーション処理部3がナビゲーション処理を行うときには、鳥瞰図データ作成部4は、鳥瞰図内の出発地Sと目的地Gと推奨経路とを色違いによって背景の地図と識別するため、推奨経路データBRDに基づいて鳥瞰図データDmapに着色処理等を施す。更に、ナビゲーション処理部3がナビゲーション処理を行うときとナビゲーション処理を行わないときとの何れの場合にも、移動体の現在位置Qiを三角マーク等で表示するためのマークデータを鳥瞰図データDmapに含ませて作成する。更に、ナビゲーション処理部3がナビゲーション処理を行うときとナビゲーション処理を行わないときとの何れの場合であっても、移動体の現在位置Qiが上述した交差点から所定距離L1の範囲外のときには、鳥瞰図データを作成する際の見下し視点Esの高さを標準(ディフォルト)の高さHsに設定して鳥瞰図データDmapを作成し、移動体の現在位置Qiが上述した交差点から所定距離L1の範囲内のときには、鳥瞰図データを作成する際の見下し視点Euの高さを標準(ディフォルト)の高さHsより高い高さHuに設定して鳥瞰図データDmapを作成する。
【0030】
図2(a)は、見下し視点Esを標準(ディフォルト)の高さHsに設定して鳥瞰図データDmapを作成する際の処理(以下、「第1の処理」と称する)を説明するための説明図、図2(b)は、見下し視点Euを高さHuに設定して鳥瞰図データDmapを作成する際の処理(以下、「第2の処理」と称する)を説明するための説明図である。
【0031】
上述したように移動体の現在位置Qiが、交差点から所定距離L1の範囲外のときには、鳥瞰図データ作成部4は第1の処理を行い、図2(a)に示すように、現在位置Qiから移動方向前方の所定距離DSTに在る位置P0と、現在位置Qiから移動方向後方の所定距離BWに在る位置QBを設定し、位置QBより高さHsの位置を見下し視点Esに設定する。ここで、距離BWは、予め10m程度の所定の距離に決められている。距離DSTは鳥瞰図データ作成部4が決定し、鳥瞰図データDmapを作成する際の地図の縮尺率に応じて、表示部9の画面範囲に合わせて鳥瞰図を表示させるための距離に決定する。そして、見下し視点Esから移動方向に在る位置P0を見たときの俯角θsに従って、ナビゲーション処理部3によって特定(クリッピング)された地図データを三次元表示(3D表示)のデータに変換することにより、表示部9の画面前方から後方に向かって奥行きを持った鳥瞰図を地図表示するための鳥瞰図データDmapを作成する。このように、鳥瞰図データ作成部4が第1の処理によって鳥瞰図データDmapを作成すると、移動体より後方に在る見下し視点Esから移動方向を見た場合の鳥瞰図を表示部9にて地図表示させることが可能となる。更に、移動体より後方に在る見下し視点Esから移動方向を見た場合の鳥瞰図が地図表示されることで、ユーザにとって視認性の良い地図を提供することができる。更に、見下し視点Esが移動体より後方に位置するため、臨場感や広い視界を感じさせる地図表示を行うことができ、視認性や利便性の向上を図ることができる。
【0032】
上述したように移動体の現在位置Qiが、交差点から所定距離L1の範囲内のときには、鳥瞰図データ作成部4は第2の処理を行い、図2(b)に示すように、現在位置Qiから移動方向前方の所定距離DSTに在る位置P0と、現在位置Qiから移動方向後方の所定距離BWに在る位置QBを設定し、位置QBより高さHuの位置を見下し視点Euに設定する。ここで、距離BWは、予め10m程度の所定の距離に決められている。距離DSTは鳥瞰図データ作成部4が決定し、鳥瞰図データDmapを作成する際の地図の縮尺率と、ナビゲーション処理部3が特定したランドマーク(上述した現在位置Qiから所定の距離L2の範囲内に存在するランドマーク)を含む地図範囲とに応じて、表示部9の画面範囲に合わせて鳥瞰図を表示させるための距離に決定する。更に、見下し視点Euの高さHuは、鳥瞰図データ作成部4が遠近法による幾何学原理を用いた演算処理によって決定し、見下し視点Euから位置P0を見下して鳥瞰図を見た場合に、ナビゲーション処理部3が特定した上述のランドマークが周囲の建物に隠れることなく視認することができる高さHuに決定する。このように、鳥瞰図データ作成部4が第2の処理によって鳥瞰図データDmapを作成すると、移動体より後方に在る見下し視点Euから移動方向を見た場合の鳥瞰図を表示部9にて地図表示させることが可能となり、更に、移動体が交差点近傍を移動中に、ランドマークを視認することが可能な鳥瞰図を地図表示させることができる。更に、移動体より後方に在る見下し視点Euから移動方向を見た場合の鳥瞰図が地図表示されることで、ユーザにとって視認性の良い地図を提供することができる。更に、見下し視点Euが移動体より後方に位置するため、臨場感や広い視界を感じさせる地図表示を行うことができ、視認性や利便性の向上を図ることができる。
【0033】
次に、かかる構成を有するナビゲーションシステム1の動作について、図4〜図7を参照して説明する。図3は、ナビゲーションシステム1の動作を示すフローチャートである。
【0034】
なお、説明の便宜上、図4に例示する平面地図において、出発地Sから交差点X1,X2を通り目的地Gに到達する推奨経路に沿って、ナビゲーションシステム1を搭載した自動車(移動体)が移動するものとして、ナビゲーションシステム1の動作について説明する。また、図4の平面地図には、交差点X1で交差する道路(経路)R1,R2と、交差点X2で道路R1に交差する道路R3と、建物BL0〜BL9と、ランドマークである建物RMKが示されている。
【0035】
図3において、ユーザが操作部8の操作により、表示部9に表示されたメニュー等に従って出発地Sと目的地Gの位置を入力してルート探索開始の指示をすると、その出発地Sと目的地Gとの位置情報(緯度、経度の情報)等を有する操作データDinが操作部8からナビゲーション処理部3に供給される(ステップST1)。
【0036】
次に、ステップST2において、ナビゲーション処理部3がナビゲーション処理を開始し、操作データDinの指示に従って出発地Sから目的地Gまでの推奨経路をルート探索し、推奨経路データBRDを生成する。
【0037】
次に、ステップST3において、ナビゲーション処理部3が交差点X1,X2の周辺に存在するランドマークを検索する検索処理と、表示部9に推奨経路と背景地図を地図表示させるための地図範囲を特定するためのクリッピング処理を行う。
【0038】
次に、ステップST4において、ナビゲーション処理部3が、現在位置検出部2で検出される移動体の現在位置Qi(現在位置Qiが出発地Sと同じ位置のときには、出発地S)と交差点X1との間の距離が所定の距離L1以内であるか検出し、現在位置Qiと交差点X1との間の距離が距離L1を超えている場合にはステップST5、現在位置Qiと交差点X1との間の距離が距離L1以内の場合にはステップST6へ移行する。
【0039】
次に、ステップST5では、鳥瞰図データ作成部4が上述した第1の処理を行い、高さHsの見下し視点Esから見た状態の鳥瞰図を地図表示するための鳥瞰図データDmapを生成し、更に、表示制御部7がその鳥瞰図データDmapに基づいて表示部9に鳥瞰図を地図表示させる。つまり、出発地Sである現在位置Qiと交差点X1との間の距離が距離L1を超えている場合には、図5に示すような、比較的低い見下し視点Esから見た状態(ユーザの視点に立って移動体から見た状態)の鳥瞰図が地図表示される。そして、ステップST7において、現在位置Qiが目的地Gに到達したか否かの判断をナビゲーション処理部3が行い、到達していない場合にはステップST4に戻って処理を繰り返す。
【0040】
そして、ステップST4に戻って処理を繰り返し、移動体が出発地Sから移動を開始し、上述のステップST4において、ナビゲーション処理部3が、現在位置検出部2で検出される移動体の現在位置Qiと交差点X1との間の距離が距離L1以内となったことを検出すると、ステップST6へ移行する。例えば、図4中に示す現在位置Q1が交差点X1から距離L1以内の地点である場合に、ステップST6に移行する。
【0041】
ステップST6では、鳥瞰図データ作成部4が上述した第2の処理を行い、高さHuの見下し視点Euから見た状態の鳥瞰図を地図表示するための鳥瞰図データDmapを生成し、更に、表示制御部7がその鳥瞰図データDmapに基づいて表示部9に鳥瞰図を地図表示させる。この第2の処理が行われると、図6に示すような、高所の見下し視点Euから見た状態の鳥瞰図が地図表示され、更に、交差点X1の周辺に存在する建物BL0〜BL3によって隠れていた道路R3を見えるようになり、更に、建物BL6によって隠れていたランドマークRMKである建物RMKが見えるようになる。そして、ステップST6からステップST7に移行し、現在位置Qiが目的地Gに到達したか否かの判断をナビゲーション処理部3が行い、到達していない場合にはステップST4に戻って処理を繰り返し、移動体が推奨経路に沿って移動し、交差点X1と現在位置Qiの間の距離が距離L1以内となっている期間中、時事刻々と変化する現在位置Qiを表示部9の画面の中央下側の所定位置に固定表示して、高さHuの見下し視点Euから見た状態の鳥瞰図が地図表示される。
【0042】
次に、移動体が交差点X2に近づき、ステップST4において、交差点X2と現在位置Qiとの間の距離が所定の距離L1以内となると、ステップST6において、鳥瞰図データ作成部4が第2の処理を行い、高さHuの見下し視点Euから見た状態の鳥瞰図を地図表示するための鳥瞰図データDmapを生成し、更に、表示制御部7がその鳥瞰図データDmapに基づいて表示部9に鳥瞰図を地図表示させる。そして、移動体が交差点X2で左折して道路R3側へ進路変更している間、図7に示すような、時事刻々と変化する現在位置Qiを表示部9の画面の中央下側の所定位置に固定して、高さHuの見下し視点Euから見た状態の鳥瞰図が地図表示され、見やすくなった交差点X2と道路R3をユーザが確認し、また、ランドマークRMKを目標にして、左折すべき交差点X2を見落とすことなく、目的地Gが在る道路R3の方向へ進路変更することが可能となる。
【0043】
そして、交差点X1から現在位置Qiまでの距離が距離L1を超えると、ステップST4からステップST5へ処理が移行し、高さHsの見下し視点Esから見た状態の鳥瞰図が表示部9にて地図表示され、更に、現在位置Qiが目的地Gに達すると、ナビゲーション処理が終了する。
【0044】
なお、ナビゲーション処理部3がナビゲーション処理を行う場合の、ナビゲーションシステム1の動作について説明したが、ナビゲーション処理部3がナビゲーション処理を行なわない場合には、ステップST1,ST2,ST7の処理はスキップされ、ステップST3において、ナビゲーション処理部3が交差点X1,X2の周辺に存在するランドマークを検索する検索処理と、表示部9に移動体の移動方向に存在する道路と背景地図を地図表示させるための地図範囲を特定するためのクリッピング処理を行って、ステップST4,ST5,ST6の処理が行われる。このように、ナビゲーション処理部3がナビゲーション処理を行なわない場合にも、図5〜図7に示したのと同様の鳥瞰図による地図表示が行われ、高所から見下ろして見やすくなった交差点や道路を表示したり、ユーザにとって目標にすることが可能なランドマークを表示することができる。
【0045】
なお、以上に説明にした実施形態では、図3のステップST6において、鳥瞰図データ作成部4が図2(b)に示した動作原理に従って鳥瞰図データDmapを作成することとしているが、図8(a)に示す動作原理、又は図8(b)に示す動作原理に従って鳥瞰図データDmapを作成してもよい。
【0046】
つまり、図8(a)では、移動体の現在位置Qiの上方の高さHuの位置を、見下し視点Euに設定し、その見下し視点Euから移動体の移動方向前方の所定距離DSTの位置P0を見下した場合の俯角θuに従って、現在位置Qiより前方の鳥瞰図を表す鳥瞰図データを作成し、更に、見下し視点Euから移動体の現在位置Qiより後方の所定距離BWの位置QBを見下した場合の俯角θbに従って、現在位置Qiより後方の鳥瞰図を表す鳥瞰図データを作成し、両者の鳥瞰図データを合わせて鳥瞰図データDmapを作成する。そして、この鳥瞰図データDmapにより、表示部9の画面に鳥瞰図を地図表示させる。こうして鳥瞰図を表示させると、更に臨場感や広い視野を感じさせる地図を提供することができる。
【0047】
また、図8(b)では、移動体の現在位置Qiより距離FW(例えば10m程度)だけ前方の位置Qfを設定し、その位置Qfの上方の高さHuの位置を、見下し視点Euに設定する。更に、その見下し視点Euから移動体の移動方向前方の所定距離DSTの位置P0を見下した場合の俯角θuに従って、位置QFより前方の鳥瞰図を表す鳥瞰図データを作成し、更に、見下し視点Euから移動体の現在位置Qiより後方の所定距離BWの位置QBを見下した場合の俯角θbに従って、現在位置Qiより後方の鳥瞰図を表す鳥瞰図データを作成し、両者の鳥瞰図データを合わせて鳥瞰図データDmapを作成する。そして、この鳥瞰図データDmapにより、表示部9の画面に鳥瞰図を地図表示させる。こうして鳥瞰図を表示させる場合にも、更に臨場感や広い視野を感じさせる地図を提供することができる。
【0048】
また、鳥瞰図データ作成部4が鳥瞰図データDmapを作成する際、道路を非透明に表示し、道路の周辺の建物等の地物を半透明に表示するためのデータ処理を施して鳥瞰図データDmapを作成してもよい。また、道路を非透明に表示し、道路の周辺のランドマークを除いた建物等の地物を半透明に表示するためのデータ処理を施して鳥瞰図データDmapを作成してもよい。これらの変形例によっても、表示部9の画面上に、道路をより鮮明に表示させることができる。
【0049】
また、鳥瞰図データ作成部4が鳥瞰図データDmapを作成する際、ランドマークである建物に、そのランドマークの名称をテキスト表示等するための識別データを付加して作成してもよい。これにより、表示部9の画面上に、ランドマークである建物をより判りやすく表示させることができる。
【符号の説明】
【0050】
1 ナビゲーションシステム
2 現在位置検出部
3 ナビゲーション処理部
4 鳥瞰図データ作成部
7 表示制御部
9 表示部
【特許請求の範囲】
【請求項1】
鳥瞰図より移動体の移動経路を地図表示するナビゲーションシステムであって、
移動体の現在位置を検出する現在地検出手段と、
前記移動経路上の現在位置付近の交差点の地図を鳥瞰図により地図表示するための鳥瞰図データを作成する鳥瞰図データ作成手段と、
前記鳥瞰図データに基づいて、鳥瞰図による地図表示を行う表示手段とを、備え、
前記鳥瞰図データ作成手段は、前記鳥瞰図データを作成するに際して、
現在位置と前記移動経路上の交差点までの距離が所定距離離れているとき、前記交差点の地図を鳥瞰図より表示し、
現在位置と前記移動経路上の交差点までの距離が所定距離以内のとき、前記交差点の地図の前記鳥瞰図上にランドマークを表示すること
を特徴とするナビゲーションシステム。
【請求項2】
前記鳥瞰図データ作成手段は、前記現在位置検出手段により検出される現在位置が、前記現在位置から所定距離の範囲内に存在する前記移動方向前方の最も近い交差点に近づくと、前記ランドマークが周囲の地物によって遮られることのない高い見下し視点から前記移動方向の地図を見た状態の前記鳥瞰図データを作成すること、
を特徴とする請求項1に記載のナビゲーションシステム。
【請求項3】
前記ナビゲーション処理手段は、前記移動体の出発地から目的地までの推奨経路をルート探索し、ルート探索した前記推奨経路と前記現在位置と前記ランドマークとを含む地図範囲を特定すること、
を特徴とする請求項1又は2に記載のナビゲーションシステム。
【請求項4】
前記鳥瞰図データ作成手段は、前記鳥瞰図データを作成するに際して、道路を非透明、道路周辺の地物を半透明で表示させるためのデータ処理を行うこと、
を特徴とする請求項1〜3の何れかに記載のナビゲーションシステム。
【請求項5】
鳥瞰図より移動体の移動経路を地図表示するナビゲーション方法であって、
移動体の現在位置を検出する現在地検出工程と、
前記移動経路上の現在位置付近の交差点の地図を鳥瞰図により地図表示するための鳥瞰図データを作成する鳥瞰図データ作成工程と、
前記鳥瞰図データに基づいて、鳥瞰図による地図表示を行う表示工程とを、を備え、
前記鳥瞰図データ作成工程は、前記鳥瞰図データを作成するに際して、
現在位置と前記移動経路上の交差点までの距離が所定距離離れているとき、前記交差点の地図を鳥瞰図より表示し、
現在位置と前記移動経路上の交差点までの距離が所定距離以内のとき、前記交差点の地図の前記鳥瞰図上にランドマークを表示すること
を特徴とするナビゲーション方法。
【請求項1】
鳥瞰図より移動体の移動経路を地図表示するナビゲーションシステムであって、
移動体の現在位置を検出する現在地検出手段と、
前記移動経路上の現在位置付近の交差点の地図を鳥瞰図により地図表示するための鳥瞰図データを作成する鳥瞰図データ作成手段と、
前記鳥瞰図データに基づいて、鳥瞰図による地図表示を行う表示手段とを、備え、
前記鳥瞰図データ作成手段は、前記鳥瞰図データを作成するに際して、
現在位置と前記移動経路上の交差点までの距離が所定距離離れているとき、前記交差点の地図を鳥瞰図より表示し、
現在位置と前記移動経路上の交差点までの距離が所定距離以内のとき、前記交差点の地図の前記鳥瞰図上にランドマークを表示すること
を特徴とするナビゲーションシステム。
【請求項2】
前記鳥瞰図データ作成手段は、前記現在位置検出手段により検出される現在位置が、前記現在位置から所定距離の範囲内に存在する前記移動方向前方の最も近い交差点に近づくと、前記ランドマークが周囲の地物によって遮られることのない高い見下し視点から前記移動方向の地図を見た状態の前記鳥瞰図データを作成すること、
を特徴とする請求項1に記載のナビゲーションシステム。
【請求項3】
前記ナビゲーション処理手段は、前記移動体の出発地から目的地までの推奨経路をルート探索し、ルート探索した前記推奨経路と前記現在位置と前記ランドマークとを含む地図範囲を特定すること、
を特徴とする請求項1又は2に記載のナビゲーションシステム。
【請求項4】
前記鳥瞰図データ作成手段は、前記鳥瞰図データを作成するに際して、道路を非透明、道路周辺の地物を半透明で表示させるためのデータ処理を行うこと、
を特徴とする請求項1〜3の何れかに記載のナビゲーションシステム。
【請求項5】
鳥瞰図より移動体の移動経路を地図表示するナビゲーション方法であって、
移動体の現在位置を検出する現在地検出工程と、
前記移動経路上の現在位置付近の交差点の地図を鳥瞰図により地図表示するための鳥瞰図データを作成する鳥瞰図データ作成工程と、
前記鳥瞰図データに基づいて、鳥瞰図による地図表示を行う表示工程とを、を備え、
前記鳥瞰図データ作成工程は、前記鳥瞰図データを作成するに際して、
現在位置と前記移動経路上の交差点までの距離が所定距離離れているとき、前記交差点の地図を鳥瞰図より表示し、
現在位置と前記移動経路上の交差点までの距離が所定距離以内のとき、前記交差点の地図の前記鳥瞰図上にランドマークを表示すること
を特徴とするナビゲーション方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−112970(P2012−112970A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2012−14215(P2012−14215)
【出願日】平成24年1月26日(2012.1.26)
【分割の表示】特願2007−294685(P2007−294685)の分割
【原出願日】平成19年11月13日(2007.11.13)
【出願人】(000005016)パイオニア株式会社 (3,620)
【出願人】(595105515)インクリメント・ピー株式会社 (197)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成24年1月26日(2012.1.26)
【分割の表示】特願2007−294685(P2007−294685)の分割
【原出願日】平成19年11月13日(2007.11.13)
【出願人】(000005016)パイオニア株式会社 (3,620)
【出願人】(595105515)インクリメント・ピー株式会社 (197)
【Fターム(参考)】
[ Back to top ]