
ナビゲーションシステム及びプログラム

【課題】現在地から案内地点までの距離を容易に認識することができるようにする。
【解決手段】情報取得処理手段と、表示部35に地図を表示する表示処理手段と、案内地点について拡大図を表示する拡大図表示処理手段とを有する。拡大図表示処理手段は、案内地点が連続交差点であるかどうかを判断し、案内地点が連続交差点である場合に、自車位置表示マークを拡大図上に表示し、現在地から第1の案内交差点までの残距離を表示するための第1の残距離表示エリアを自車位置表示マークに追随させて表示し、現在地から第2の案内交差点までの残距離を表示するための第2の残距離表示エリアを拡大図上の所定の位置に表示する。案内地点が連続交差点である場合に、第1の残距離表示エリアが自車位置表示マークに追随させて表示され、第2の残距離表示エリアが拡大図上に表示されるので、運転者は、道路の形状を認識しながら残距離を容易に認識することができる。
【解決手段】情報取得処理手段と、表示部35に地図を表示する表示処理手段と、案内地点について拡大図を表示する拡大図表示処理手段とを有する。拡大図表示処理手段は、案内地点が連続交差点であるかどうかを判断し、案内地点が連続交差点である場合に、自車位置表示マークを拡大図上に表示し、現在地から第1の案内交差点までの残距離を表示するための第1の残距離表示エリアを自車位置表示マークに追随させて表示し、現在地から第2の案内交差点までの残距離を表示するための第2の残距離表示エリアを拡大図上の所定の位置に表示する。案内地点が連続交差点である場合に、第1の残距離表示エリアが自車位置表示マークに追随させて表示され、第2の残距離表示エリアが拡大図上に表示されるので、運転者は、道路の形状を認識しながら残距離を容易に認識することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーションシステム及びプログラムに関するものである。
【背景技術】
【0002】
従来、ナビゲーション装置においては、例えば、GPS(グローバルポジショニングシステム)によって車両の現在の位置、すなわち、現在地が検出されるとともに、ジャイロセンサによって検出された車両の回転角速度、すなわち、旋回角に基づいて、車両の方位、すなわち、自車方位が検出され、データ記録部から地図データが読み出され、表示部に地図画面が形成され、該地図画面に、現在地を表す自車位置、自車位置の周辺の地図及び自車方位が表示されるようになっている。したがって、操作者である運転者は、前記地図画面に表示された自車位置、自車位置の周辺の地図及び自車方位に従って車両を走行させることができる。
【0003】
また、運転者が目的地を入力し、探索条件を設定すると、該探索条件に基づいて現在地で表される出発地から目的地までの経路が探索される。そして、探索された経路、すなわち、探索経路は前記表示部に形成された探索経路表示画面に自車位置及び目的地と共に表示される。したがって、運転者は表示された探索経路に従って車両を走行させることができる。なお、運転者が現在地と異なる地点を出発地として入力した場合、入力された出発地から目的地までの経路が探索される。
【0004】
ところで、車両を走行させているときに、現在地から所定の距離以内に、案内地点として次に通過する予定の交差点があると、自車位置を示すマーク、交差点を示すマーク、及び現在地から交差点までの距離、すなわち、残距離を示す目盛が表示されるようになっている(例えば、特許文献1参照。)。
【特許文献1】特開平9−222330号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、前記従来のナビゲーションシステムにおいては、目盛には主な数字が表示されているだけであるので、現在地から交差点までの距離を認識するのが困難であるだけでなく、目盛を正確に読む必要があるので、作業が煩わしい。
【0006】
本発明は、前記従来のナビゲーションシステムの問題点を解決して、現在地から案内地点までの距離を容易に認識することができるナビゲーションシステム及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
そのために、本発明のナビゲーションシステムにおいては、ナビ情報を取得する情報取得処理手段と、前記ナビ情報に基づいて表示部に地図を表示する表示処理手段と、車両を所定の経路に沿って走行させているときに、所定の案内地点について拡大図を表示する拡大図表示処理手段とを有する。
【0008】
そして、該拡大図表示処理手段は、前記案内地点が複数の案内交差点から成る連続交差点であるかどうかを判断し、前記案内地点が連続交差点である場合に、車両の現在地を表す自車位置表示マークを前記拡大図上に表示し、現在地から前記各案内交差点のうちの第1の案内交差点までの残距離を表示するための第1の残距離表示エリアを前記自車位置表示マークに追随させて表示し、前記第1の案内交差点を通過した後の現在地から前記各案内交差点のうちの第2の案内交差点までの残距離を表示するための第2の残距離表示エリアを前記拡大図上の所定の位置に表示する。
【発明の効果】
【0009】
本発明のナビゲーションシステムにおいては、案内地点が複数の案内交差点から成る連続交差点である場合に、車両の現在地を表す自車位置表示マークが表示され、現在地から第1の案内交差点までの残距離を表示するための第1の残距離表示エリアが前記自車位置表示マークに追随させて表示され、現在地から第2の案内交差点までの残距離を表示するための第2の残距離表示エリアが拡大図上の所定の位置に表示されるので、運転者は、車両を走行させる道路の形状、案内地点の状態を認識しながら残距離を容易に認識することができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。
【0011】
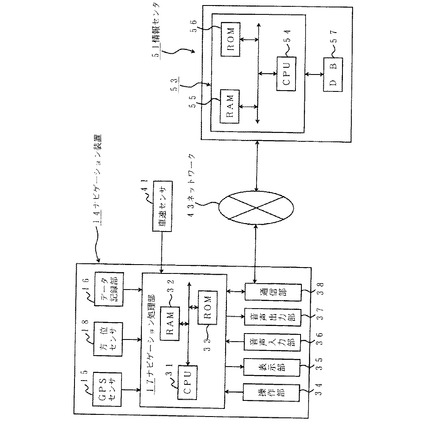
図1は本発明の実施の形態におけるナビゲーションシステムを示すブロック図である。
【0012】
図において、14は情報端末、例えば、車両に搭載された車載装置としてのナビゲーション装置であり、該ナビゲーション装置14は、現在地等を検出する現在地検出部としてのGPSセンサ15、地図データ、道路データ、探索データ等のナビゲーション装置14の基本的な情報、すなわち、ナビ情報のほかに各種の情報が記録された情報記録部としてのデータ記録部16、各種のプログラム、データ等に基づいてコンピュータとして機能し、入力された情報に基づいて、ナビゲーション処理等の各種の演算処理を行うナビゲーション処理部17、自車方位を検出する方位検出部としての方位センサ18、操作者である運転者が操作することによって所定の入力を行うための第1の入力部としての操作部34、図示されない画面に表示された画像によって各種の表示を行い、運転者に通知するための第1の出力部としての表示部35、音声によって所定の入力を行うための第2の入力部としての音声入力部36、音声によって各種の表示を行い、運転者に通知するための第2の出力部としての音声出力部37、及び通信端末として機能する送受信部としての通信部38を備え、前記ナビゲーション処理部17に、操作部34、表示部35、音声入力部36、音声出力部37及び通信部38が接続される。また、前記ナビゲーション処理部17には、車速検出部としての車速センサ41も接続される。
【0013】
前記GPSセンサ15は、人工衛星によって発生させられた電波を受信することによって地球上における現在地を検出し、併せて時刻を検出する。
【0014】
本実施の形態においては、現在地検出部としてGPSセンサ15が使用されるが、該GPSセンサ15に代えて図示されない距離センサ、ステアリングセンサ、高度計等を単独で、又は組み合わせて使用することもできる。なお、前記距離センサは、道路上の所定の地点間の距離を検出するものであり、図示されない車輪の回転速度に基づいて、又は加速度を2回積分して距離を算出する。また、前記ステアリングセンサは、舵(だ)角を検出するものであり、例えば、図示されないステアリングホイールの回転部に取り付けられた光学的な回転センサ、回転抵抗センサ、車輪に取り付けられた角度センサ等を使用することができる。
【0015】
また、前記方位センサ18としてジャイロセンサ、地磁気センサ等を使用することができる。前記ジャイロセンサとしては、例えば、ガスレートジャイロ、振動ジャイロ等が使用され、旋回角を積分することによって自車方位を検出する。そして、前記地磁気センサは、地磁気を測定することによって自車方位を検出する。
【0016】
前記データ記録部16は、地図データファイル、交差点データファイル、ノードデータファイル、道路データファイル、探索データファイル、施設情報データファイル等のデータファイルから成るデータベースを備え、前記各データファイルには、表示部35に各種の画像を出力するためのデータが記録される。なお、前記データ記録部16には、所定の情報を音声出力部37によって出力するためのデータも記録される。
【0017】
例えば、前記地図データファイルには地図を表示するための地図データが、交差点データファイルには各交差点に関する交差点データが、ノードデータファイルにはノード点に関するノードデータが、道路データファイルには道路に関する道路データが、探索データファイルには経路を探索するための探索データが、施設情報データファイルには各種の施設に関する施設情報データがそれぞれ記録され、前記交差点データ、ノードデータ、道路データ、探索データ等によって道路状況を表す道路状況データが構成される。
【0018】
前記交差点データには、交差点の名称、交差点の形状、交差点に隣接する主要な施設、交差点の先の主要な地名、連続交差点における交差点間距離等を表すデータが含まれる。また、前記ノードデータには、実際の道路の分岐点(交差点、T字路等も含む)、ノード点、各ノード点間を連結するノード点間リンク等を表すデータが含まれる。
【0019】
そして、前記道路データには、道路自体について、幅員、勾(こう)配、カント、バンク、路面の状態、道路の車線数、車線数の減少する箇所、幅員の狭くなる箇所等を、コーナについて、曲率半径、交差点、T字路、コーナの入口等を、道路属性について、降坂路、登坂路等が、道路種別について、国道、県道、細街路等の一般道のほか、高速道路、都市高速道路、有料道路等の高速・有料道を表すデータが含まれる。さらに、道路データには、踏切、高速道路の入口及び出口の取付道(ランプウェイ)、高速・有料道の料金所等を表すデータが含まれる。また、前記施設情報データには、各地域のホテル、ガソリンスタンド、駐車場、観光地、デパート等の施設について、名称、住所、電話番号、施設案内等の施設情報を表すデータが含まれる。
【0020】
前記ナビゲーション処理部17は、ナビゲーション装置14の全体の制御を行う演算装置及び制御装置としてのCPU31、該CPU31が各種の演算処理を行うに当たってワーキングメモリとして使用される第1の記録媒体としての、DRAM、SRAM、MRAM、FeRAM等のRAM32、制御用のプログラムのほか、目的地までの経路の探索、経路案内等を行うための各種のプログラムが記録された第2の記録媒体としてのROM33、各種のデータ、プログラム等を記録するために使用される第3の記録媒体としての図示されないフラッシュメモリ等を備える。なお、前記RAM32、ROM33、フラッシュメモリ等の内部記憶装置として半導体メモリ、磁気コア等が使用される。
【0021】
そして、演算装置及び制御装置としてCPU31に代えてMPU等を使用することもできる。
【0022】
また、前記データ記録部16は、前記各種のデータを記録するために、外部記憶装置として配設された第4の記録媒体としてのハードディスク、フレキシブルディスク等の図示されない磁気ディスクを備えるほかに、各種のデータを読み出したり、書き込んだりするための読出・書込ヘッド等の図示されないヘッドを備える。前記データ記録部16には、同様に外部記憶装置として配設された第5の記録媒体としての磁気テープ、磁気ドラム、CD、MD、DVD、光ディスク、MO、ICカード、光カード等を配設することもできる。
【0023】
ところで、前記ROM33に各種のプログラムを記録し、前記データ記録部16に各種のデータを記録することができるが、プログラム、データ等をハードディスク等に記録することもできる。この場合、ハードディスク等から前記プログラム、データ等を読み出してフラッシュメモリに書き込むことができる。したがって、ハードディスク等を交換することによって前記プログラム、データ等を更新することができる。また、図示されない自動変速機の制御を行うために自動変速機制御装置が車両に搭載されている場合には、自動変速機制御装置の制御用のプログラム、データ等も前記ハードディスク等に記録することができる。さらに、通信部38を介して前記プログラム、データ等を受信し、フラッシュメモリに書き込むこともできる。
【0024】
前記操作部34は、運転者が操作することによって、走行開始時の現在地を修正したり、出発地及び目的地を入力したり、通過点を入力したり、通信部38を作動させたりするためのものであり、表示部35とは独立に配設されたキーボード、マウス、バーコードリーダ、ライトペン、遠隔操作用のリモートコントロール装置、ジョイスティック等を使用することができる。また、前記操作部34として、前記表示部35に形成された画面に画像で表示された各種のキー、スイッチ、ボタン等の画像操作部をタッチ又はクリックすることによって、所定の入力操作を行うことができる。
【0025】
前記表示部35としては、CRTディスプレイ、液晶ディスプレイ、プラズマディスプレイ等のディスプレイを使用したり、車両のフロントガラスにホログラムを投影するホログラム装置等を使用したりすることができる。そして、表示部35に形成された各種の画面に、現在地を表す自車位置、地図、探索経路、該探索経路に沿った案内情報、交通情報等を表示したり、交差点又は探索経路における特徴的な写真、コマ図等、次の交差点までの距離、次の交差点における進行方向を表示したりすることができるだけでなく、前記画像操作部、操作部34、音声入力部36等の操作案内、操作メニュー、キーの案内を表示したり、FM多重放送の番組等を表示したりすることができる。
【0026】
また、音声入力部36は、図示されないマイクロホン等によって構成され、音声によって必要な情報を入力することができる。さらに、音声出力部37は、図示されない音声合成装置及びスピーカを備え、音声出力部37から、前記探索経路、案内情報、交通情報等が、例えば、音声合成装置によって合成された音声で出力される。なお、音声合成装置によって合成された音声のほかに、各種の音、あらかじめテープ、メモリ等に録音された各種の案内情報等を出力することもできる。
【0027】
前記通信部38は、第1の情報提供者としてのVICS(登録商標:Vehicle Information and Communication System)センタ等の道路交通情報センタから送信された各種の情報を、道路に沿って配設された電波ビーコン装置、光ビーコン装置等を介して電波ビーコン、光ビーコン等として受信するためのビーコンレシーバ、FM放送局を介してFM多重放送として受信するためのFM受信機等を備える。そして、前記ビーコンレシーバによって、渋滞情報、規制情報、駐車場情報、交通事故情報、サービスエリアの混雑状況情報等の交通情報を受信したり、前記FM受信機によって前記交通情報のほかに、ニュース、天気予報等の一般情報をFM多重情報として受信したりすることができる。なお、前記ビーコンレシーバ及びFM受信機は、ユニット化されてVICSレシーバとして配設されるようになっているが、別々に配設することもできる。
【0028】
また、通信部38は、所定の基地局から送信されたGPSセンサ15の検出誤差を検出するためのD−GPS情報等の各種のデータを受信することもできる。さらに、前記通信部38は、電波ビーコン、光ビーコン等によって位置情報を受信し、現在地を検出することもでき、その場合、前記ビーコンレシーバは、現在地検出部として機能する。
【0029】
さらに、通信部38は、第2の情報提供者としての情報センタ51から交通情報、一般情報等の各種の情報を受信することもできる。そのために、前記通信部38と情報センタ51とはネットワーク43を介して接続される。
【0030】
前記ナビゲーション装置14、VICS(登録商標)センタ、情報センタ51、ネットワーク43等によってナビゲーションシステムが構成され、前記通信部38と情報センタ51の図示されない通信部との間で各種の情報の送受信が行われる。
【0031】
本実施の形態においては、前記通信部38を通信端末として機能させるために、通信部38に携帯電話等の通信機器がモジュールとして内蔵されるようになっているが、通信部38とは別に通信機器を接続し、通信機器と通信部38とを接続することもできる。その場合、通信機器として、携帯電話、自動車電話、PHS等の移動電話を使用したり、無線LANカード等を使用したり、パソコン、携帯用コンピュータ、携帯情報端末(PDA)、電子手帳、テレビ電話、ゲーム機等に通信機能を持たせたものを使用したりすることができる。
【0032】
また、前記ネットワーク43として、LAN(Local Area Network)、WAN(Wide Area Network)、イントラネット、携帯電話回線網、電話回線網、公衆通信回線網、専用通信回線網、インターネット等の通信回線網等の通信手段を使用することができる。そして、放送衛星によるCS放送、BS放送、地上波ディジタルテレビ放送、FM多重放送等を利用する通信手段を使用することもできる。さらに、高度道路交通システム(ITS)において利用されるノンストップ自動料金支払いシステム(ETC)、境域通信システム(DSRC)等の通信手段を使用することもできる。
【0033】
なお、前記情報センタ51は、個人、企業、団体、地方自治体、政府関係機関等のいずれが運営していてもよく、前記VICS(登録商標)センタが運営していてもよい。
【0034】
前記情報センタ51は、サーバ53、該サーバ53に接続された情報記録部としてのデータベース(DB)57、前記通信部等を備え、該通信部によって、情報センタ51とナビゲーション装置14との間で双方向の通信が行われ、交通情報、一般情報等の提供が行われる。そのために、前記サーバ53は、演算装置及び制御装置としてのCPU54、RAM55、ROM56等を備え、所定のプログラム、データ等に基づいてコンピュータとして機能する。また、前記データベース57に前記データ記録部16に記録された各種のデータ(ナビ情報も含まれる。)と同様のデータを記録することができる。なお、前記サーバ53及びナビゲーション処理部17によってコンピュータを構成することもできる。また、CPU54に代えてMPU等を使用することができる。
【0035】
そして、前記CPU54は、前記VICS(登録商標)センタ等から送信された交通情報、一般情報等を受信し、一次情報としてデータベース57に記録したり、前記一次情報を加工して統計処理を施し、渋滞状況の履歴を表す履歴情報、渋滞状況を予測する渋滞予測情報等を構成する統計データを作成し、該統計データを二次情報としてデータベース57に記録したりする。本実施の形態においては、前記統計データを作成するに当たり、履歴情報に、日時、曜日、天候、各種イベント、季節、施設情報(デパート、スーパーマーケット等の大型の施設の有無)等の詳細な条件が加えられる。
【0036】
次に、前記構成のナビゲーションシステムの基本動作について説明する。
【0037】
まず、運転者によって操作部34が操作され、ナビゲーション装置14が起動されると、CPU31の図示されないナビ初期化処理手段は、ナビ初期化処理を行い、GPSセンサ15によって検出された現在地、及び方位センサ18によって検出された自車方位を読み込むとともに、各種のデータを初期化する。なお、前記CPU31の図示されないマッチング処理手段は、マッチング処理を行い、読み込まれた現在地の軌跡、及び周辺の道路を構成する各道路リンクの形状、配列等に基づいて、現在地がいずれの道路リンク上に位置するかの判定を行うことによって、現在地を特定する。
【0038】
続いて、CPU31の図示されない情報取得処理手段は、情報取得処理を行い、前記ナビ情報を、データ記録部16から読み出して取得するか、又は通信部38を介して情報センタ51等から受信して取得する。なお、情報センタ51から取得する場合、前記情報取得処理手段は、受信したナビ情報をフラッシュメモリ、ハードディスク等にダウンロードする。また、ナビ情報を通信部38を介して取得する際にプログラムを併せて取得することもできる。
【0039】
そして、前記CPU31の図示されない表示処理手段は、表示処理を行い、前記表示部35に地図画面を形成し、該地図画面に、ナビ情報に基づいて前記自車位置、自車位置の周辺の地図及び自車方位を表示する。したがって、運転者は、自車位置、自車位置の周辺の地図及び自車方位に従って車両を走行させることができる。
【0040】
次に、前記ナビゲーション装置14又はナビゲーションシステムを、経路を探索するために使用する場合のナビゲーションシステムの動作について説明する。
【0041】
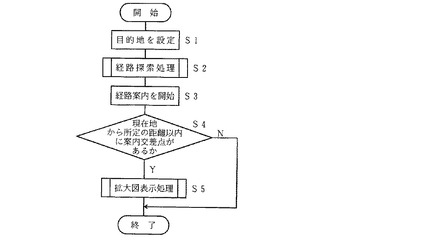
図2は本発明の実施の形態におけるナビゲーションシステムの動作を示すメインフローチャートである。
【0042】
運転者が操作部34(図1)を操作して目的地を入力すると、CPU31の図示されない目的地設定処理手段は、目的地設定処理を行い、目的地を設定する。なお、必要に応じて出発地を入力し、設定することもできる。また、あらかじめ所定の地点を登録しておき、登録された地点を目的地として入力することができる。
【0043】
そして、目的地が設定されると、CPU31の図示されない経路探索処理手段は、経路探索処理を行い、前記現在地、目的地等を読み込むとともに、データ記録部16から探索データ等を読み出し、現在地、目的地及び探索データに基づいて、現在地で表される出発地から目的地までの経路を探索し、探索経路を表す経路データを出力する。
【0044】
続いて、前記CPU31の図示されない案内処理手段は、案内処理を行い、運転者に探索経路の案内、すなわち、経路案内を行う。そのために、前記案内処理手段の経路表示処理手段は、経路表示処理を行い、前記経路データを読み込み、該経路データに従って、前記地図画面に探索経路を表示する。
【0045】
なお、必要に応じて、前記案内処理手段の音声出力処理手段は、音声出力処理を行い、音声出力部37から探索経路を音声で出力して経路案内を行う。
【0046】
ところで、情報センタ51において経路探索処理を行うことができる。その場合、CPU31は現在地、目的地等を情報センタ51に送信する。該情報センタ51は、現在地、目的地を受信すると、CPU54の図示されない経路探索処理手段は、同様の経路探索処理を行い、データベース57から探索データ等を読み出し、現在地、目的地及び探索データに基づいて、現在地で表される出発地から目的地までの経路を探索し、探索経路を表す経路データを出力する。続いて、CPU54の図示されない送信処理手段は、送信処理を行い、前記経路データをナビゲーション装置14に送信する。したがって、ナビゲーション装置14において、前記情報取得処理手段が情報センタ51からの経路データを受信すると、前記案内処理手段は、前述されたような経路案内を行う。
【0047】
このようにして、経路案内が行われ、運転者は探索経路に従って車両を走行させることができる。
【0048】
なお、前記ナビゲーション装置14は、前記通信部38を介して交通情報、一般情報等を受信することができるようになっている。そのために、前記情報取得処理手段の付加情報取得処理手段は、付加情報取得処理を行い、前記交通情報、一般情報等を付加情報として受信して取得する。したがって、前記経路表示処理手段は、前記地図画面に付加情報を表示する。
【0049】
前記交通情報は、情報の種別を表す情報種別データ、メッシュとしての2次メッシュを特定するための2次メッシュX、Yデータ、二つの地点(例えば、交差点)間を連結する道路リンクを特定し、かつ、上り/下りの別を表すリンク番号データ、該リンク番号データに対応させて提供される情報の内容を表すリンク情報を含み、該リンク情報は、例えば、前記道路リンクの始点から渋滞の先頭までの距離を表す渋滞先頭データ、渋滞の度合いを表す渋滞度合データ、渋滞区間を前記渋滞の先頭から渋滞の末尾までの渋滞長(距離)によって表す渋滞長データ等から成る。
【0050】
したがって、前記経路表示処理手段は、交通情報のうちの各リンク情報を、例えば、渋滞が発生している道路の上り/下りの別及び渋滞区間を表す交通状況指標としての渋滞矢印に変換し、該渋滞矢印を前記地図画面上の道路に沿って表示する。この場合、渋滞の度合いに応じて前記道路、渋滞矢印等の色が、赤、橙(だいだい)等に変更される。
【0051】
このようにして、運転者は、車両を走行させる予定の経路、探索経路等における渋滞状況を知ることができる。
【0052】
ところで、案内処理手段による経路案内が開始され、車両を所定の経路に沿って走行させているときに、現在地が案内地点としての次に通過する予定の交差点、すなわち、案内交差点に差しかかると、前記地図画面の所定の位置に、現在地から案内交差点までの残距離が表示されるようになっている。すなわち、本実施の形態においては、車両が案内交差点に差しかかると、前記地図画面に案内交差点の周辺を示す拡大図、すなわち、交差点拡大図が表示され、該交差点拡大図の所定の位置に前記残距離が表示される。なお、前記案内交差点は、車両を所定の経路に沿って走行させているときの、右左折したり、分岐したりする交差点をいう。
【0053】
そのために、前記案内処理手段の交差点判定処理手段は、交差点判定処理を行い、車両を所定の経路に沿って走行させているときに、現在地及び交差点データを読み込み、現在地及び各交差点の座標に基づいて、現在地から所定の距離Lf(例えば、300〔m〕)以内に、案内交差点があるかどうかを判断し、案内交差点がある場合、前記案内処理手段の拡大図表示処理手段は、拡大図表示処理を行い、前記案内交差点のうちの最も近いものについて交差点拡大図を表示する。
【0054】
なお、本実施の形態においては、車両は所定の経路としての探索経路に沿って走行させられ、探索経路上の現在地から前記距離Lf以内に案内交差点があるかどうかが判断される。
【0055】
そして、前記案内処理手段の残距離算出処理手段は、残距離算出処理を行い、現在地及び案内交差点の各座標に基づいて、現在地から案内交差点までの残距離を算出する。
【0056】
次に、フローチャートについて説明する。
ステップS1 目的地を設定する。
ステップS2 経路探索処理を行う。
ステップS3 経路案内を開始する。
ステップS4 現在地から所定の距離Lf以内に案内交差点があるかどうかを判断する。現在地から所定の距離Lf以内に案内交差点がある場合はステップS5に進み、ない場合は処理を終了する。
ステップS5 拡大図表示処理を行い、処理を終了する。
【0057】
次に、ステップS5における拡大図表示処理の動作について説明する。
【0058】
図3は本発明の実施の形態における拡大図表示処理のサブルーチンを示す第1の図、図4は本発明の実施の形態における拡大図表示処理のサブルーチンを示す第2の図、図5は本発明の実施の形態における交差点拡大図の例を示す第1の図、図6は本発明の実施の形態における交差点拡大図の例を示す第2の図、図7は本発明の実施の形態における交差点拡大図の例を示す第3の図、図8は本発明の実施の形態における交差点拡大図の例を示す第4の図、図9は本発明の実施の形態における交差点拡大図の例を示す第5の図、図10は本発明の実施の形態における交差点拡大図の例を示す第6の図、図11は本発明の実施の形態における交差点拡大図の例を示す第7の図、図12は本発明の実施の形態における交差点拡大図の例を示す第8の図、図13は本発明の実施の形態における交差点拡大図の例を示す第9の図である。
【0059】
経路案内が開始されると、表示部35(図1)には地図画面が形成され、該地図画面に所定の経路が探索経路として表示されるほかに、方位、地名、時刻等が所定の位置に表示される。そして、前記探索経路上に自車位置及び自車方位を表すマーク、すなわち、自車位置表示マークが表示される。
【0060】
そして、拡大図表示処理手段は、探索経路Rt1上の現在地から距離Lf以内にある案内交差点が連続(複数)交差点であるかどうかを判断し、連続交差点である場合、拡大図表示処理手段は、連続交差点フラグに1を立てる。この場合、図5〜9における案内交差点m2は探索経路Rt1上において連続交差点を構成しないので、連続交差点フラグに1は立てられない。
【0061】
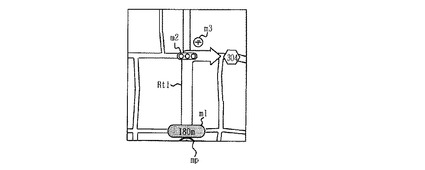
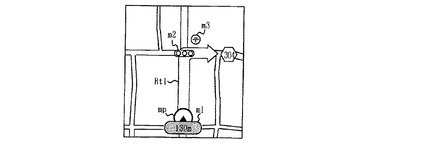
続いて、前記拡大図表示処理手段の初期拡大図表示処理手段は、初期拡大図表示処理を行い、データ記録部16から案内交差点についての交差点データを読み出すとともに、残距離を読み込み、前記交差点データ及び残距離に基づいて、図5に示されるような初期状態の交差点拡大図、すなわち、初期拡大図を作成する。本実施の形態において、車両の進行方向が上方に向くように初期拡大図が作成される。
【0062】
該初期拡大図においては、中央に上下方向に延在させて探索経路Rt1が表示されるほかに、自車位置表示マークmp、その時点の残距離を表示するためのエリア、すなわち、残距離表示エリアm1、探索経路Rt1上の案内交差点m2、案内交差点に隣接する主要な施設を表すマークm3等が初期拡大図の上半部の所定の位置に表示される。なお、必要に応じて、案内交差点のレーン表示を表すエリア、案内交差点の名称等を初期拡大図の上隅のコーナ部に表示することができる。前記残距離表示エリアm1は、初期拡大図上の下端部においてあらかじめ設定された第1の初期位置に、前記自車位置表示マークmpは、初期拡大図上の下端において、前記残距離表示エリアm1より下方のあらかじめ設定された第2の初期位置に表示される。なお、本実施の形態においては、自車位置表示マークmpの一部だけが表示されるが、自車位置表示マークmpの全部を表示することもできる。
【0063】
続いて、前記初期拡大図表示処理手段の画像処理手段は、画像処理を行い、あらかじめ設定された寸法の拡大図表示領域に前記初期拡大図を表示することができるように、スケールを算出して設定し、所定の描画手法に基づいて、前記スケールに基づく縮尺で前記初期拡大図を縮小又は拡大する。前記拡大図表示エリアは、案内交差点m2の周辺の地図、及び案内交差点m2より所定の距離Lfだけ手前の自車位置表示マークmpの一部を表示することができるように設定される。
【0064】
続いて、前記初期拡大図表示処理手段の画面表示処理手段は、画面表示処理を行い、表示部35に拡大図表示画面を形成し、該拡大図表示画面に前記初期拡大図を表示する。
【0065】
その間、前記拡大図表示処理手段の残距離表示処理手段は、残距離表示処理を行い、残距離を読み込み、その時点の残距離を前記第1の初期位置において残距離表示エリアm1に表示する。なお、前記自車位置表示マークmpは継続して第2の初期位置に表示される。
【0066】
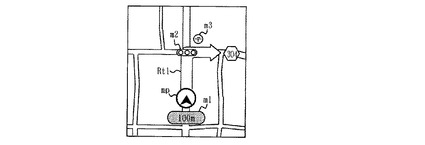
次に、前記拡大図表示処理手段の自車位置表示処理手段は、自車位置表示処理を行い、残距離を読み込み、残距離が第1の閾(しきい)値ψ1(例えば、150〔m〕)以下であるかどうかを判断する。残距離が第1の閾値ψ1以下である場合、前記自車位置表示処理手段は、図6に示されるように、現在地の座標に従って交差点拡大図上の位置を表す画面座標を算出し、該画面座標に従って自車位置表示マークmpを、上方に、すなわち、案内交差点m2側に移動させて表示する。
【0067】
この間、残距離表示エリアm1は継続して前記第1の初期位置に表示され、前記残距離表示処理手段は、その時点の残距離を読み込み、残距離表示エリアm1に残距離を表示する。なお、前記自車位置表示マークmpが案内交差点m2側に移動するのに伴って、残距離表示エリアm1と自車位置表示マークmpとが重なるので、重なっている間、運転者が残距離を読むことができるように残距離表示エリアm1が自車位置表示マークmpより優先して表示される。すなわち、図6に示されるように、自車位置表示マークmpは、残距離表示エリアm1の下を移動するように表示される。
【0068】
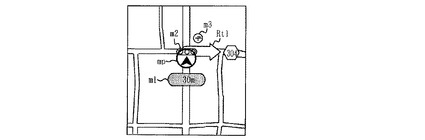
続いて、前記残距離表示処理手段は、残距離表示エリアm1と自車位置表示マークmpとが重ならなくなったかどうかを判断し、残距離表示エリアm1と自車位置表示マークmpとが重ならなくなった場合、図7〜9に示されるように、残距離表示エリアm1を自車位置表示マークmpに合わせて移動させる。そのために、前記残距離表示処理手段は、自車位置表示マークmpの交差点拡大図上の画面座標を読み込み、該画面座標より設定された距離だけ下方の画面座標の位置に残距離表示エリアm1を自車位置表示マークmpに追随させて表示する。
【0069】
続いて、前記残距離表示処理手段は、残距離を読み込み、残距離が前記第1の閾値ψ1より小さい第2の閾値ψ2(例えば、20〔m〕)以下であるかどうかを判断する。残距離が第2の閾値ψ2以下である場合、残距離の表示を停止し、残距離表示エリアm1を消去する。前記自車位置表示処理手段は、その後も、現在地の座標に従って交差点拡大図上の画面座標を算出し、画面座標の位置に自車位置表示マークmpを移動させて表示する。
【0070】
次に、前記拡大図表示処理手段は、現在地及び案内交差点m2の各座標に基づいて、車両が案内交差点m2を通過したかどうかを判断する。そして、車両が案内交差点m2を通過した場合、前記拡大図表示処理手段は、連続交差点フラグに1が立っているかどうかを判断する。この場合、前記探索経路Rt1上において案内交差点m2は連続交差点を構成しないので、連続交差点フラグに1が立っていない。したがって、前記拡大図表示処理手段は、交差点拡大図の表示を解除し、地図画面から消去する。
【0071】
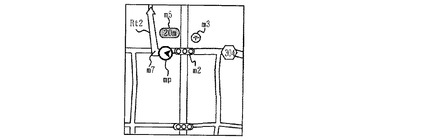
ところで、図10〜13に示されるように、探索経路Rt2上の現在地から距離Lf以内にある案内交差点m2、m7間の距離、すなわち、交差点間距離が所定の閾値より短い場合、案内交差点m2、m7によって連続交差点が構成される。したがって、前記拡大図表示処理手段によって連続交差点フラグに1が立てられる。
【0072】
その場合、車両が前記案内交差点m2を通過するまでの間、前記残距離表示処理手段は、第1の残距離表示エリアとしての残距離表示エリアm4を自車位置表示マークmpに追随させながら表示し、前記残距離表示エリアm4に自車位置から案内交差点m2までの第1の残距離を表示する。また、前記残距離表示処理手段は、交差点データを参照して交差点間距離を読み込み、前記交差点拡大図における案内交差点m2、m7間の所定の位置に第2の残距離表示エリアとしての残距離表示エリアm5を表示し、該残距離表示エリアm5に前記交差点間距離を、案内交差点m2から案内交差点m7までの第2の残距離として表示する。
【0073】
そして、車両が案内交差点m2を通過すると、連続交差点フラグに1が立っているので、前記拡大図表示処理手段は、交差点拡大図の表示を継続する。また、前記自車位置表示処理手段は、図11及び12に示されるように、現在地の座標に従って交差点拡大図上の位置を表す画面座標を算出し、該画面座標に従って自車位置表示マークmpを、左方に、すなわち、案内交差点m7側に移動させて表示する。
【0074】
また、前記残距離表示処理手段は、車両が案内交差点m2を通過すると、残距離表示エリアm4を消去するとともに、車両が案内交差点m7を通過するまでの間、自車位置から案内交差点m7までの残距離を読み込み、残距離表示エリアm5に表示する。なお、残距離表示エリアm5は車両が案内交差点m7を通過するまでの間、同じ位置に表示される。また、車両が案内交差点m2を通過するまでは、前記残距離表示エリアm5はグレーアウトして表示される。
【0075】
次に、前記拡大図表示処理手段は、現在地及び案内交差点m7の各座標に基づいて、車両が案内交差点m7を通過したかどうかを判断する。そして、車両が案内交差点m7を通過した場合、前記残距離表示処理手段は、図13に示されるように、残距離表示エリアm5を消去する。そして、前記拡大図表示処理手段は、交差点拡大図の表示を解除し、地図画面から消去する。
【0076】
このように、本実施の形態においては、残距離表示エリアm1、m4、m5に、車両の走行に伴って、その時点の残距離が数字をカウントダウンさせながら表示されるので、残距離を容易に認識することができるだけでなく、目盛を読む必要がないので、作業を簡素化することができる。
【0077】
また、自車位置表示マークmpが移動するのに伴って残距離表示エリアm1、m4が自車位置表示マークmpに追随させて表示されるので、車両を走行させる道路の形状、案内交差点m2、m7の状態を認識しながら残距離を容易に認識することができる。したがって、地図画面を凝視する時間を短くすることができ、運転に集中することができる。
【0078】
次に、フローチャートについて説明する。
ステップS5−1 連続交差点であるかどうかを判断する。連続交差点である場合はステップS5−2に、連続交差点でない場合はステップS5−3に進む。
ステップS5−2 連続交差点フラグに1を立てる。
ステップS5−3 初期拡大図を表示する。
ステップS5−4 残距離が第1の閾値ψ1以下であるかどうかを判断する。残距離が第1の閾値ψ1以下である場合はステップS5−5に進み、残距離が第1の閾値ψ1より長い場合はステップS5−3に戻る。
ステップS5−5 自車位置表示マークmpを移動させる。
ステップS5−6 残距離表示エリアm1と自車位置表示マークmpとが重ならなくなったかどうかを判断する。残距離表示エリアm1と自車位置表示マークmpとが重ならなくなった場合はステップS5−7に進み、重なる場合はステップS5−5に戻る。
ステップS5−7 残距離表示エリアm1を自車位置表示マークmpに合わせて移動させる。
ステップS5−8 残距離が第2の閾値ψ2以下であるかどうかを判断する。残距離が第2の閾値ψ2以下である場合はステップS5−9に進み、残距離が第2の閾値ψ2より長い場合はステップS5−7に戻る。
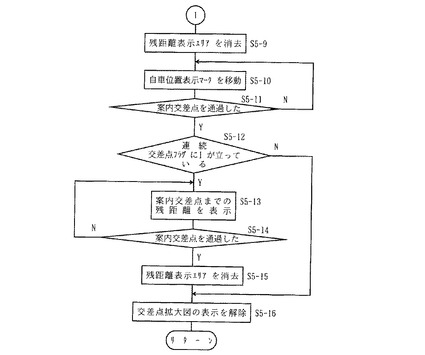
ステップS5−9 残距離表示エリアm1を消去する。
ステップS5−10 自車位置表示マークmpを移動させる。
ステップS5−11 案内交差点m2を通過したかどうかを判断する。案内交差点m2を通過した場合はステップS5−12に進み、通過していない場合はステップS5−10に戻る。
ステップS5−12 連続交差点フラグに1が立っているかどうかを判断する。連続交差点フラグに1が立っている場合はステップS5−13に、立っていない場合はステップS5−16に進む。
ステップS5−13 案内交差点m7までの残距離を表示する。
ステップS5−14 案内交差点m7を通過したかどうかを判断する。案内交差点m7を通過した場合はステップS5−15に進み、通過していない場合はステップS5−13に戻る。
ステップS5−15 残距離表示エリアm5を消去する。
ステップS5−16 交差点拡大図の表示を解除し、リターンする。
【0079】
本実施の形態においては、車両が案内交差点に差しかかると、交差点拡大図が表示され、該交差点拡大図に残距離が表示されるようになっているが、他の実施の形態においては、交差点拡大図が表示されることなく、地図画面に残距離が表示される。
【0080】
そのために、案内処理手段の交差点判定処理手段は、交差点判定処理を行い、次に通過する交差点があるかどうかを判断し、次に通過する交差点がある場合、前記案内処理手段の残距離算出処理手段は、残距離算出処理を行い、現在地から案内交差点までの残距離を算出する。
【0081】
次に、前記案内処理手段は、図5と同様に、探索経路Rt1、自車位置表示マークmp、残距離表示エリアm1、案内交差点m2等を地図画面に表示する。
【0082】
続いて、前記案内処理手段の自車位置表示処理手段は、自車位置表示処理を行い、現在地の座標に従って自車位置表示マークmpを移動させる。また、この間、案内処理手段の残距離表示処理手段は、残距離表示エリアm1を継続して前記第1の初期位置に表示する。
【0083】
そして、残距離表示エリアm1と自車位置表示マークmpとが重ならなくなった場合、前記自車位置表示マークmpの移動に伴って、残距離表示エリアm1が自車位置表示マークmpに合わせて移動させられる。
【0084】
なお、本発明は前記実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【図面の簡単な説明】
【0085】
【図1】本発明の実施の形態におけるナビゲーションシステムを示すブロック図である。
【図2】本発明の実施の形態におけるナビゲーションシステムの動作を示すメインフローチャートである。
【図3】本発明の実施の形態における拡大図表示処理のサブルーチンを示す第1の図である。
【図4】本発明の実施の形態における拡大図表示処理のサブルーチンを示す第2の図である。
【図5】本発明の実施の形態における交差点拡大図の例を示す第1の図である。
【図6】本発明の実施の形態における交差点拡大図の例を示す第2の図である。
【図7】本発明の実施の形態における交差点拡大図の例を示す第3の図である。
【図8】本発明の実施の形態における交差点拡大図の例を示す第4の図である。
【図9】本発明の実施の形態における交差点拡大図の例を示す第5の図である。
【図10】本発明の実施の形態における交差点拡大図の例を示す第6の図である。
【図11】本発明の実施の形態における交差点拡大図の例を示す第7の図である。
【図12】本発明の実施の形態における交差点拡大図の例を示す第8の図である。
【図13】本発明の実施の形態における交差点拡大図の例を示す第9の図である。
【符号の説明】
【0086】
14 ナビゲーション装置
35 表示部
43 ネットワーク
51 情報センタ
m1、m4、m5 残距離表示エリア
m2、m7 案内交差点
mp 自車位置表示マーク
【技術分野】
【0001】
本発明は、ナビゲーションシステム及びプログラムに関するものである。
【背景技術】
【0002】
従来、ナビゲーション装置においては、例えば、GPS(グローバルポジショニングシステム)によって車両の現在の位置、すなわち、現在地が検出されるとともに、ジャイロセンサによって検出された車両の回転角速度、すなわち、旋回角に基づいて、車両の方位、すなわち、自車方位が検出され、データ記録部から地図データが読み出され、表示部に地図画面が形成され、該地図画面に、現在地を表す自車位置、自車位置の周辺の地図及び自車方位が表示されるようになっている。したがって、操作者である運転者は、前記地図画面に表示された自車位置、自車位置の周辺の地図及び自車方位に従って車両を走行させることができる。
【0003】
また、運転者が目的地を入力し、探索条件を設定すると、該探索条件に基づいて現在地で表される出発地から目的地までの経路が探索される。そして、探索された経路、すなわち、探索経路は前記表示部に形成された探索経路表示画面に自車位置及び目的地と共に表示される。したがって、運転者は表示された探索経路に従って車両を走行させることができる。なお、運転者が現在地と異なる地点を出発地として入力した場合、入力された出発地から目的地までの経路が探索される。
【0004】
ところで、車両を走行させているときに、現在地から所定の距離以内に、案内地点として次に通過する予定の交差点があると、自車位置を示すマーク、交差点を示すマーク、及び現在地から交差点までの距離、すなわち、残距離を示す目盛が表示されるようになっている(例えば、特許文献1参照。)。
【特許文献1】特開平9−222330号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、前記従来のナビゲーションシステムにおいては、目盛には主な数字が表示されているだけであるので、現在地から交差点までの距離を認識するのが困難であるだけでなく、目盛を正確に読む必要があるので、作業が煩わしい。
【0006】
本発明は、前記従来のナビゲーションシステムの問題点を解決して、現在地から案内地点までの距離を容易に認識することができるナビゲーションシステム及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
そのために、本発明のナビゲーションシステムにおいては、ナビ情報を取得する情報取得処理手段と、前記ナビ情報に基づいて表示部に地図を表示する表示処理手段と、車両を所定の経路に沿って走行させているときに、所定の案内地点について拡大図を表示する拡大図表示処理手段とを有する。
【0008】
そして、該拡大図表示処理手段は、前記案内地点が複数の案内交差点から成る連続交差点であるかどうかを判断し、前記案内地点が連続交差点である場合に、車両の現在地を表す自車位置表示マークを前記拡大図上に表示し、現在地から前記各案内交差点のうちの第1の案内交差点までの残距離を表示するための第1の残距離表示エリアを前記自車位置表示マークに追随させて表示し、前記第1の案内交差点を通過した後の現在地から前記各案内交差点のうちの第2の案内交差点までの残距離を表示するための第2の残距離表示エリアを前記拡大図上の所定の位置に表示する。
【発明の効果】
【0009】
本発明のナビゲーションシステムにおいては、案内地点が複数の案内交差点から成る連続交差点である場合に、車両の現在地を表す自車位置表示マークが表示され、現在地から第1の案内交差点までの残距離を表示するための第1の残距離表示エリアが前記自車位置表示マークに追随させて表示され、現在地から第2の案内交差点までの残距離を表示するための第2の残距離表示エリアが拡大図上の所定の位置に表示されるので、運転者は、車両を走行させる道路の形状、案内地点の状態を認識しながら残距離を容易に認識することができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。
【0011】
図1は本発明の実施の形態におけるナビゲーションシステムを示すブロック図である。
【0012】
図において、14は情報端末、例えば、車両に搭載された車載装置としてのナビゲーション装置であり、該ナビゲーション装置14は、現在地等を検出する現在地検出部としてのGPSセンサ15、地図データ、道路データ、探索データ等のナビゲーション装置14の基本的な情報、すなわち、ナビ情報のほかに各種の情報が記録された情報記録部としてのデータ記録部16、各種のプログラム、データ等に基づいてコンピュータとして機能し、入力された情報に基づいて、ナビゲーション処理等の各種の演算処理を行うナビゲーション処理部17、自車方位を検出する方位検出部としての方位センサ18、操作者である運転者が操作することによって所定の入力を行うための第1の入力部としての操作部34、図示されない画面に表示された画像によって各種の表示を行い、運転者に通知するための第1の出力部としての表示部35、音声によって所定の入力を行うための第2の入力部としての音声入力部36、音声によって各種の表示を行い、運転者に通知するための第2の出力部としての音声出力部37、及び通信端末として機能する送受信部としての通信部38を備え、前記ナビゲーション処理部17に、操作部34、表示部35、音声入力部36、音声出力部37及び通信部38が接続される。また、前記ナビゲーション処理部17には、車速検出部としての車速センサ41も接続される。
【0013】
前記GPSセンサ15は、人工衛星によって発生させられた電波を受信することによって地球上における現在地を検出し、併せて時刻を検出する。
【0014】
本実施の形態においては、現在地検出部としてGPSセンサ15が使用されるが、該GPSセンサ15に代えて図示されない距離センサ、ステアリングセンサ、高度計等を単独で、又は組み合わせて使用することもできる。なお、前記距離センサは、道路上の所定の地点間の距離を検出するものであり、図示されない車輪の回転速度に基づいて、又は加速度を2回積分して距離を算出する。また、前記ステアリングセンサは、舵(だ)角を検出するものであり、例えば、図示されないステアリングホイールの回転部に取り付けられた光学的な回転センサ、回転抵抗センサ、車輪に取り付けられた角度センサ等を使用することができる。
【0015】
また、前記方位センサ18としてジャイロセンサ、地磁気センサ等を使用することができる。前記ジャイロセンサとしては、例えば、ガスレートジャイロ、振動ジャイロ等が使用され、旋回角を積分することによって自車方位を検出する。そして、前記地磁気センサは、地磁気を測定することによって自車方位を検出する。
【0016】
前記データ記録部16は、地図データファイル、交差点データファイル、ノードデータファイル、道路データファイル、探索データファイル、施設情報データファイル等のデータファイルから成るデータベースを備え、前記各データファイルには、表示部35に各種の画像を出力するためのデータが記録される。なお、前記データ記録部16には、所定の情報を音声出力部37によって出力するためのデータも記録される。
【0017】
例えば、前記地図データファイルには地図を表示するための地図データが、交差点データファイルには各交差点に関する交差点データが、ノードデータファイルにはノード点に関するノードデータが、道路データファイルには道路に関する道路データが、探索データファイルには経路を探索するための探索データが、施設情報データファイルには各種の施設に関する施設情報データがそれぞれ記録され、前記交差点データ、ノードデータ、道路データ、探索データ等によって道路状況を表す道路状況データが構成される。
【0018】
前記交差点データには、交差点の名称、交差点の形状、交差点に隣接する主要な施設、交差点の先の主要な地名、連続交差点における交差点間距離等を表すデータが含まれる。また、前記ノードデータには、実際の道路の分岐点(交差点、T字路等も含む)、ノード点、各ノード点間を連結するノード点間リンク等を表すデータが含まれる。
【0019】
そして、前記道路データには、道路自体について、幅員、勾(こう)配、カント、バンク、路面の状態、道路の車線数、車線数の減少する箇所、幅員の狭くなる箇所等を、コーナについて、曲率半径、交差点、T字路、コーナの入口等を、道路属性について、降坂路、登坂路等が、道路種別について、国道、県道、細街路等の一般道のほか、高速道路、都市高速道路、有料道路等の高速・有料道を表すデータが含まれる。さらに、道路データには、踏切、高速道路の入口及び出口の取付道(ランプウェイ)、高速・有料道の料金所等を表すデータが含まれる。また、前記施設情報データには、各地域のホテル、ガソリンスタンド、駐車場、観光地、デパート等の施設について、名称、住所、電話番号、施設案内等の施設情報を表すデータが含まれる。
【0020】
前記ナビゲーション処理部17は、ナビゲーション装置14の全体の制御を行う演算装置及び制御装置としてのCPU31、該CPU31が各種の演算処理を行うに当たってワーキングメモリとして使用される第1の記録媒体としての、DRAM、SRAM、MRAM、FeRAM等のRAM32、制御用のプログラムのほか、目的地までの経路の探索、経路案内等を行うための各種のプログラムが記録された第2の記録媒体としてのROM33、各種のデータ、プログラム等を記録するために使用される第3の記録媒体としての図示されないフラッシュメモリ等を備える。なお、前記RAM32、ROM33、フラッシュメモリ等の内部記憶装置として半導体メモリ、磁気コア等が使用される。
【0021】
そして、演算装置及び制御装置としてCPU31に代えてMPU等を使用することもできる。
【0022】
また、前記データ記録部16は、前記各種のデータを記録するために、外部記憶装置として配設された第4の記録媒体としてのハードディスク、フレキシブルディスク等の図示されない磁気ディスクを備えるほかに、各種のデータを読み出したり、書き込んだりするための読出・書込ヘッド等の図示されないヘッドを備える。前記データ記録部16には、同様に外部記憶装置として配設された第5の記録媒体としての磁気テープ、磁気ドラム、CD、MD、DVD、光ディスク、MO、ICカード、光カード等を配設することもできる。
【0023】
ところで、前記ROM33に各種のプログラムを記録し、前記データ記録部16に各種のデータを記録することができるが、プログラム、データ等をハードディスク等に記録することもできる。この場合、ハードディスク等から前記プログラム、データ等を読み出してフラッシュメモリに書き込むことができる。したがって、ハードディスク等を交換することによって前記プログラム、データ等を更新することができる。また、図示されない自動変速機の制御を行うために自動変速機制御装置が車両に搭載されている場合には、自動変速機制御装置の制御用のプログラム、データ等も前記ハードディスク等に記録することができる。さらに、通信部38を介して前記プログラム、データ等を受信し、フラッシュメモリに書き込むこともできる。
【0024】
前記操作部34は、運転者が操作することによって、走行開始時の現在地を修正したり、出発地及び目的地を入力したり、通過点を入力したり、通信部38を作動させたりするためのものであり、表示部35とは独立に配設されたキーボード、マウス、バーコードリーダ、ライトペン、遠隔操作用のリモートコントロール装置、ジョイスティック等を使用することができる。また、前記操作部34として、前記表示部35に形成された画面に画像で表示された各種のキー、スイッチ、ボタン等の画像操作部をタッチ又はクリックすることによって、所定の入力操作を行うことができる。
【0025】
前記表示部35としては、CRTディスプレイ、液晶ディスプレイ、プラズマディスプレイ等のディスプレイを使用したり、車両のフロントガラスにホログラムを投影するホログラム装置等を使用したりすることができる。そして、表示部35に形成された各種の画面に、現在地を表す自車位置、地図、探索経路、該探索経路に沿った案内情報、交通情報等を表示したり、交差点又は探索経路における特徴的な写真、コマ図等、次の交差点までの距離、次の交差点における進行方向を表示したりすることができるだけでなく、前記画像操作部、操作部34、音声入力部36等の操作案内、操作メニュー、キーの案内を表示したり、FM多重放送の番組等を表示したりすることができる。
【0026】
また、音声入力部36は、図示されないマイクロホン等によって構成され、音声によって必要な情報を入力することができる。さらに、音声出力部37は、図示されない音声合成装置及びスピーカを備え、音声出力部37から、前記探索経路、案内情報、交通情報等が、例えば、音声合成装置によって合成された音声で出力される。なお、音声合成装置によって合成された音声のほかに、各種の音、あらかじめテープ、メモリ等に録音された各種の案内情報等を出力することもできる。
【0027】
前記通信部38は、第1の情報提供者としてのVICS(登録商標:Vehicle Information and Communication System)センタ等の道路交通情報センタから送信された各種の情報を、道路に沿って配設された電波ビーコン装置、光ビーコン装置等を介して電波ビーコン、光ビーコン等として受信するためのビーコンレシーバ、FM放送局を介してFM多重放送として受信するためのFM受信機等を備える。そして、前記ビーコンレシーバによって、渋滞情報、規制情報、駐車場情報、交通事故情報、サービスエリアの混雑状況情報等の交通情報を受信したり、前記FM受信機によって前記交通情報のほかに、ニュース、天気予報等の一般情報をFM多重情報として受信したりすることができる。なお、前記ビーコンレシーバ及びFM受信機は、ユニット化されてVICSレシーバとして配設されるようになっているが、別々に配設することもできる。
【0028】
また、通信部38は、所定の基地局から送信されたGPSセンサ15の検出誤差を検出するためのD−GPS情報等の各種のデータを受信することもできる。さらに、前記通信部38は、電波ビーコン、光ビーコン等によって位置情報を受信し、現在地を検出することもでき、その場合、前記ビーコンレシーバは、現在地検出部として機能する。
【0029】
さらに、通信部38は、第2の情報提供者としての情報センタ51から交通情報、一般情報等の各種の情報を受信することもできる。そのために、前記通信部38と情報センタ51とはネットワーク43を介して接続される。
【0030】
前記ナビゲーション装置14、VICS(登録商標)センタ、情報センタ51、ネットワーク43等によってナビゲーションシステムが構成され、前記通信部38と情報センタ51の図示されない通信部との間で各種の情報の送受信が行われる。
【0031】
本実施の形態においては、前記通信部38を通信端末として機能させるために、通信部38に携帯電話等の通信機器がモジュールとして内蔵されるようになっているが、通信部38とは別に通信機器を接続し、通信機器と通信部38とを接続することもできる。その場合、通信機器として、携帯電話、自動車電話、PHS等の移動電話を使用したり、無線LANカード等を使用したり、パソコン、携帯用コンピュータ、携帯情報端末(PDA)、電子手帳、テレビ電話、ゲーム機等に通信機能を持たせたものを使用したりすることができる。
【0032】
また、前記ネットワーク43として、LAN(Local Area Network)、WAN(Wide Area Network)、イントラネット、携帯電話回線網、電話回線網、公衆通信回線網、専用通信回線網、インターネット等の通信回線網等の通信手段を使用することができる。そして、放送衛星によるCS放送、BS放送、地上波ディジタルテレビ放送、FM多重放送等を利用する通信手段を使用することもできる。さらに、高度道路交通システム(ITS)において利用されるノンストップ自動料金支払いシステム(ETC)、境域通信システム(DSRC)等の通信手段を使用することもできる。
【0033】
なお、前記情報センタ51は、個人、企業、団体、地方自治体、政府関係機関等のいずれが運営していてもよく、前記VICS(登録商標)センタが運営していてもよい。
【0034】
前記情報センタ51は、サーバ53、該サーバ53に接続された情報記録部としてのデータベース(DB)57、前記通信部等を備え、該通信部によって、情報センタ51とナビゲーション装置14との間で双方向の通信が行われ、交通情報、一般情報等の提供が行われる。そのために、前記サーバ53は、演算装置及び制御装置としてのCPU54、RAM55、ROM56等を備え、所定のプログラム、データ等に基づいてコンピュータとして機能する。また、前記データベース57に前記データ記録部16に記録された各種のデータ(ナビ情報も含まれる。)と同様のデータを記録することができる。なお、前記サーバ53及びナビゲーション処理部17によってコンピュータを構成することもできる。また、CPU54に代えてMPU等を使用することができる。
【0035】
そして、前記CPU54は、前記VICS(登録商標)センタ等から送信された交通情報、一般情報等を受信し、一次情報としてデータベース57に記録したり、前記一次情報を加工して統計処理を施し、渋滞状況の履歴を表す履歴情報、渋滞状況を予測する渋滞予測情報等を構成する統計データを作成し、該統計データを二次情報としてデータベース57に記録したりする。本実施の形態においては、前記統計データを作成するに当たり、履歴情報に、日時、曜日、天候、各種イベント、季節、施設情報(デパート、スーパーマーケット等の大型の施設の有無)等の詳細な条件が加えられる。
【0036】
次に、前記構成のナビゲーションシステムの基本動作について説明する。
【0037】
まず、運転者によって操作部34が操作され、ナビゲーション装置14が起動されると、CPU31の図示されないナビ初期化処理手段は、ナビ初期化処理を行い、GPSセンサ15によって検出された現在地、及び方位センサ18によって検出された自車方位を読み込むとともに、各種のデータを初期化する。なお、前記CPU31の図示されないマッチング処理手段は、マッチング処理を行い、読み込まれた現在地の軌跡、及び周辺の道路を構成する各道路リンクの形状、配列等に基づいて、現在地がいずれの道路リンク上に位置するかの判定を行うことによって、現在地を特定する。
【0038】
続いて、CPU31の図示されない情報取得処理手段は、情報取得処理を行い、前記ナビ情報を、データ記録部16から読み出して取得するか、又は通信部38を介して情報センタ51等から受信して取得する。なお、情報センタ51から取得する場合、前記情報取得処理手段は、受信したナビ情報をフラッシュメモリ、ハードディスク等にダウンロードする。また、ナビ情報を通信部38を介して取得する際にプログラムを併せて取得することもできる。
【0039】
そして、前記CPU31の図示されない表示処理手段は、表示処理を行い、前記表示部35に地図画面を形成し、該地図画面に、ナビ情報に基づいて前記自車位置、自車位置の周辺の地図及び自車方位を表示する。したがって、運転者は、自車位置、自車位置の周辺の地図及び自車方位に従って車両を走行させることができる。
【0040】
次に、前記ナビゲーション装置14又はナビゲーションシステムを、経路を探索するために使用する場合のナビゲーションシステムの動作について説明する。
【0041】
図2は本発明の実施の形態におけるナビゲーションシステムの動作を示すメインフローチャートである。
【0042】
運転者が操作部34(図1)を操作して目的地を入力すると、CPU31の図示されない目的地設定処理手段は、目的地設定処理を行い、目的地を設定する。なお、必要に応じて出発地を入力し、設定することもできる。また、あらかじめ所定の地点を登録しておき、登録された地点を目的地として入力することができる。
【0043】
そして、目的地が設定されると、CPU31の図示されない経路探索処理手段は、経路探索処理を行い、前記現在地、目的地等を読み込むとともに、データ記録部16から探索データ等を読み出し、現在地、目的地及び探索データに基づいて、現在地で表される出発地から目的地までの経路を探索し、探索経路を表す経路データを出力する。
【0044】
続いて、前記CPU31の図示されない案内処理手段は、案内処理を行い、運転者に探索経路の案内、すなわち、経路案内を行う。そのために、前記案内処理手段の経路表示処理手段は、経路表示処理を行い、前記経路データを読み込み、該経路データに従って、前記地図画面に探索経路を表示する。
【0045】
なお、必要に応じて、前記案内処理手段の音声出力処理手段は、音声出力処理を行い、音声出力部37から探索経路を音声で出力して経路案内を行う。
【0046】
ところで、情報センタ51において経路探索処理を行うことができる。その場合、CPU31は現在地、目的地等を情報センタ51に送信する。該情報センタ51は、現在地、目的地を受信すると、CPU54の図示されない経路探索処理手段は、同様の経路探索処理を行い、データベース57から探索データ等を読み出し、現在地、目的地及び探索データに基づいて、現在地で表される出発地から目的地までの経路を探索し、探索経路を表す経路データを出力する。続いて、CPU54の図示されない送信処理手段は、送信処理を行い、前記経路データをナビゲーション装置14に送信する。したがって、ナビゲーション装置14において、前記情報取得処理手段が情報センタ51からの経路データを受信すると、前記案内処理手段は、前述されたような経路案内を行う。
【0047】
このようにして、経路案内が行われ、運転者は探索経路に従って車両を走行させることができる。
【0048】
なお、前記ナビゲーション装置14は、前記通信部38を介して交通情報、一般情報等を受信することができるようになっている。そのために、前記情報取得処理手段の付加情報取得処理手段は、付加情報取得処理を行い、前記交通情報、一般情報等を付加情報として受信して取得する。したがって、前記経路表示処理手段は、前記地図画面に付加情報を表示する。
【0049】
前記交通情報は、情報の種別を表す情報種別データ、メッシュとしての2次メッシュを特定するための2次メッシュX、Yデータ、二つの地点(例えば、交差点)間を連結する道路リンクを特定し、かつ、上り/下りの別を表すリンク番号データ、該リンク番号データに対応させて提供される情報の内容を表すリンク情報を含み、該リンク情報は、例えば、前記道路リンクの始点から渋滞の先頭までの距離を表す渋滞先頭データ、渋滞の度合いを表す渋滞度合データ、渋滞区間を前記渋滞の先頭から渋滞の末尾までの渋滞長(距離)によって表す渋滞長データ等から成る。
【0050】
したがって、前記経路表示処理手段は、交通情報のうちの各リンク情報を、例えば、渋滞が発生している道路の上り/下りの別及び渋滞区間を表す交通状況指標としての渋滞矢印に変換し、該渋滞矢印を前記地図画面上の道路に沿って表示する。この場合、渋滞の度合いに応じて前記道路、渋滞矢印等の色が、赤、橙(だいだい)等に変更される。
【0051】
このようにして、運転者は、車両を走行させる予定の経路、探索経路等における渋滞状況を知ることができる。
【0052】
ところで、案内処理手段による経路案内が開始され、車両を所定の経路に沿って走行させているときに、現在地が案内地点としての次に通過する予定の交差点、すなわち、案内交差点に差しかかると、前記地図画面の所定の位置に、現在地から案内交差点までの残距離が表示されるようになっている。すなわち、本実施の形態においては、車両が案内交差点に差しかかると、前記地図画面に案内交差点の周辺を示す拡大図、すなわち、交差点拡大図が表示され、該交差点拡大図の所定の位置に前記残距離が表示される。なお、前記案内交差点は、車両を所定の経路に沿って走行させているときの、右左折したり、分岐したりする交差点をいう。
【0053】
そのために、前記案内処理手段の交差点判定処理手段は、交差点判定処理を行い、車両を所定の経路に沿って走行させているときに、現在地及び交差点データを読み込み、現在地及び各交差点の座標に基づいて、現在地から所定の距離Lf(例えば、300〔m〕)以内に、案内交差点があるかどうかを判断し、案内交差点がある場合、前記案内処理手段の拡大図表示処理手段は、拡大図表示処理を行い、前記案内交差点のうちの最も近いものについて交差点拡大図を表示する。
【0054】
なお、本実施の形態においては、車両は所定の経路としての探索経路に沿って走行させられ、探索経路上の現在地から前記距離Lf以内に案内交差点があるかどうかが判断される。
【0055】
そして、前記案内処理手段の残距離算出処理手段は、残距離算出処理を行い、現在地及び案内交差点の各座標に基づいて、現在地から案内交差点までの残距離を算出する。
【0056】
次に、フローチャートについて説明する。
ステップS1 目的地を設定する。
ステップS2 経路探索処理を行う。
ステップS3 経路案内を開始する。
ステップS4 現在地から所定の距離Lf以内に案内交差点があるかどうかを判断する。現在地から所定の距離Lf以内に案内交差点がある場合はステップS5に進み、ない場合は処理を終了する。
ステップS5 拡大図表示処理を行い、処理を終了する。
【0057】
次に、ステップS5における拡大図表示処理の動作について説明する。
【0058】
図3は本発明の実施の形態における拡大図表示処理のサブルーチンを示す第1の図、図4は本発明の実施の形態における拡大図表示処理のサブルーチンを示す第2の図、図5は本発明の実施の形態における交差点拡大図の例を示す第1の図、図6は本発明の実施の形態における交差点拡大図の例を示す第2の図、図7は本発明の実施の形態における交差点拡大図の例を示す第3の図、図8は本発明の実施の形態における交差点拡大図の例を示す第4の図、図9は本発明の実施の形態における交差点拡大図の例を示す第5の図、図10は本発明の実施の形態における交差点拡大図の例を示す第6の図、図11は本発明の実施の形態における交差点拡大図の例を示す第7の図、図12は本発明の実施の形態における交差点拡大図の例を示す第8の図、図13は本発明の実施の形態における交差点拡大図の例を示す第9の図である。
【0059】
経路案内が開始されると、表示部35(図1)には地図画面が形成され、該地図画面に所定の経路が探索経路として表示されるほかに、方位、地名、時刻等が所定の位置に表示される。そして、前記探索経路上に自車位置及び自車方位を表すマーク、すなわち、自車位置表示マークが表示される。
【0060】
そして、拡大図表示処理手段は、探索経路Rt1上の現在地から距離Lf以内にある案内交差点が連続(複数)交差点であるかどうかを判断し、連続交差点である場合、拡大図表示処理手段は、連続交差点フラグに1を立てる。この場合、図5〜9における案内交差点m2は探索経路Rt1上において連続交差点を構成しないので、連続交差点フラグに1は立てられない。
【0061】
続いて、前記拡大図表示処理手段の初期拡大図表示処理手段は、初期拡大図表示処理を行い、データ記録部16から案内交差点についての交差点データを読み出すとともに、残距離を読み込み、前記交差点データ及び残距離に基づいて、図5に示されるような初期状態の交差点拡大図、すなわち、初期拡大図を作成する。本実施の形態において、車両の進行方向が上方に向くように初期拡大図が作成される。
【0062】
該初期拡大図においては、中央に上下方向に延在させて探索経路Rt1が表示されるほかに、自車位置表示マークmp、その時点の残距離を表示するためのエリア、すなわち、残距離表示エリアm1、探索経路Rt1上の案内交差点m2、案内交差点に隣接する主要な施設を表すマークm3等が初期拡大図の上半部の所定の位置に表示される。なお、必要に応じて、案内交差点のレーン表示を表すエリア、案内交差点の名称等を初期拡大図の上隅のコーナ部に表示することができる。前記残距離表示エリアm1は、初期拡大図上の下端部においてあらかじめ設定された第1の初期位置に、前記自車位置表示マークmpは、初期拡大図上の下端において、前記残距離表示エリアm1より下方のあらかじめ設定された第2の初期位置に表示される。なお、本実施の形態においては、自車位置表示マークmpの一部だけが表示されるが、自車位置表示マークmpの全部を表示することもできる。
【0063】
続いて、前記初期拡大図表示処理手段の画像処理手段は、画像処理を行い、あらかじめ設定された寸法の拡大図表示領域に前記初期拡大図を表示することができるように、スケールを算出して設定し、所定の描画手法に基づいて、前記スケールに基づく縮尺で前記初期拡大図を縮小又は拡大する。前記拡大図表示エリアは、案内交差点m2の周辺の地図、及び案内交差点m2より所定の距離Lfだけ手前の自車位置表示マークmpの一部を表示することができるように設定される。
【0064】
続いて、前記初期拡大図表示処理手段の画面表示処理手段は、画面表示処理を行い、表示部35に拡大図表示画面を形成し、該拡大図表示画面に前記初期拡大図を表示する。
【0065】
その間、前記拡大図表示処理手段の残距離表示処理手段は、残距離表示処理を行い、残距離を読み込み、その時点の残距離を前記第1の初期位置において残距離表示エリアm1に表示する。なお、前記自車位置表示マークmpは継続して第2の初期位置に表示される。
【0066】
次に、前記拡大図表示処理手段の自車位置表示処理手段は、自車位置表示処理を行い、残距離を読み込み、残距離が第1の閾(しきい)値ψ1(例えば、150〔m〕)以下であるかどうかを判断する。残距離が第1の閾値ψ1以下である場合、前記自車位置表示処理手段は、図6に示されるように、現在地の座標に従って交差点拡大図上の位置を表す画面座標を算出し、該画面座標に従って自車位置表示マークmpを、上方に、すなわち、案内交差点m2側に移動させて表示する。
【0067】
この間、残距離表示エリアm1は継続して前記第1の初期位置に表示され、前記残距離表示処理手段は、その時点の残距離を読み込み、残距離表示エリアm1に残距離を表示する。なお、前記自車位置表示マークmpが案内交差点m2側に移動するのに伴って、残距離表示エリアm1と自車位置表示マークmpとが重なるので、重なっている間、運転者が残距離を読むことができるように残距離表示エリアm1が自車位置表示マークmpより優先して表示される。すなわち、図6に示されるように、自車位置表示マークmpは、残距離表示エリアm1の下を移動するように表示される。
【0068】
続いて、前記残距離表示処理手段は、残距離表示エリアm1と自車位置表示マークmpとが重ならなくなったかどうかを判断し、残距離表示エリアm1と自車位置表示マークmpとが重ならなくなった場合、図7〜9に示されるように、残距離表示エリアm1を自車位置表示マークmpに合わせて移動させる。そのために、前記残距離表示処理手段は、自車位置表示マークmpの交差点拡大図上の画面座標を読み込み、該画面座標より設定された距離だけ下方の画面座標の位置に残距離表示エリアm1を自車位置表示マークmpに追随させて表示する。
【0069】
続いて、前記残距離表示処理手段は、残距離を読み込み、残距離が前記第1の閾値ψ1より小さい第2の閾値ψ2(例えば、20〔m〕)以下であるかどうかを判断する。残距離が第2の閾値ψ2以下である場合、残距離の表示を停止し、残距離表示エリアm1を消去する。前記自車位置表示処理手段は、その後も、現在地の座標に従って交差点拡大図上の画面座標を算出し、画面座標の位置に自車位置表示マークmpを移動させて表示する。
【0070】
次に、前記拡大図表示処理手段は、現在地及び案内交差点m2の各座標に基づいて、車両が案内交差点m2を通過したかどうかを判断する。そして、車両が案内交差点m2を通過した場合、前記拡大図表示処理手段は、連続交差点フラグに1が立っているかどうかを判断する。この場合、前記探索経路Rt1上において案内交差点m2は連続交差点を構成しないので、連続交差点フラグに1が立っていない。したがって、前記拡大図表示処理手段は、交差点拡大図の表示を解除し、地図画面から消去する。
【0071】
ところで、図10〜13に示されるように、探索経路Rt2上の現在地から距離Lf以内にある案内交差点m2、m7間の距離、すなわち、交差点間距離が所定の閾値より短い場合、案内交差点m2、m7によって連続交差点が構成される。したがって、前記拡大図表示処理手段によって連続交差点フラグに1が立てられる。
【0072】
その場合、車両が前記案内交差点m2を通過するまでの間、前記残距離表示処理手段は、第1の残距離表示エリアとしての残距離表示エリアm4を自車位置表示マークmpに追随させながら表示し、前記残距離表示エリアm4に自車位置から案内交差点m2までの第1の残距離を表示する。また、前記残距離表示処理手段は、交差点データを参照して交差点間距離を読み込み、前記交差点拡大図における案内交差点m2、m7間の所定の位置に第2の残距離表示エリアとしての残距離表示エリアm5を表示し、該残距離表示エリアm5に前記交差点間距離を、案内交差点m2から案内交差点m7までの第2の残距離として表示する。
【0073】
そして、車両が案内交差点m2を通過すると、連続交差点フラグに1が立っているので、前記拡大図表示処理手段は、交差点拡大図の表示を継続する。また、前記自車位置表示処理手段は、図11及び12に示されるように、現在地の座標に従って交差点拡大図上の位置を表す画面座標を算出し、該画面座標に従って自車位置表示マークmpを、左方に、すなわち、案内交差点m7側に移動させて表示する。
【0074】
また、前記残距離表示処理手段は、車両が案内交差点m2を通過すると、残距離表示エリアm4を消去するとともに、車両が案内交差点m7を通過するまでの間、自車位置から案内交差点m7までの残距離を読み込み、残距離表示エリアm5に表示する。なお、残距離表示エリアm5は車両が案内交差点m7を通過するまでの間、同じ位置に表示される。また、車両が案内交差点m2を通過するまでは、前記残距離表示エリアm5はグレーアウトして表示される。
【0075】
次に、前記拡大図表示処理手段は、現在地及び案内交差点m7の各座標に基づいて、車両が案内交差点m7を通過したかどうかを判断する。そして、車両が案内交差点m7を通過した場合、前記残距離表示処理手段は、図13に示されるように、残距離表示エリアm5を消去する。そして、前記拡大図表示処理手段は、交差点拡大図の表示を解除し、地図画面から消去する。
【0076】
このように、本実施の形態においては、残距離表示エリアm1、m4、m5に、車両の走行に伴って、その時点の残距離が数字をカウントダウンさせながら表示されるので、残距離を容易に認識することができるだけでなく、目盛を読む必要がないので、作業を簡素化することができる。
【0077】
また、自車位置表示マークmpが移動するのに伴って残距離表示エリアm1、m4が自車位置表示マークmpに追随させて表示されるので、車両を走行させる道路の形状、案内交差点m2、m7の状態を認識しながら残距離を容易に認識することができる。したがって、地図画面を凝視する時間を短くすることができ、運転に集中することができる。
【0078】
次に、フローチャートについて説明する。
ステップS5−1 連続交差点であるかどうかを判断する。連続交差点である場合はステップS5−2に、連続交差点でない場合はステップS5−3に進む。
ステップS5−2 連続交差点フラグに1を立てる。
ステップS5−3 初期拡大図を表示する。
ステップS5−4 残距離が第1の閾値ψ1以下であるかどうかを判断する。残距離が第1の閾値ψ1以下である場合はステップS5−5に進み、残距離が第1の閾値ψ1より長い場合はステップS5−3に戻る。
ステップS5−5 自車位置表示マークmpを移動させる。
ステップS5−6 残距離表示エリアm1と自車位置表示マークmpとが重ならなくなったかどうかを判断する。残距離表示エリアm1と自車位置表示マークmpとが重ならなくなった場合はステップS5−7に進み、重なる場合はステップS5−5に戻る。
ステップS5−7 残距離表示エリアm1を自車位置表示マークmpに合わせて移動させる。
ステップS5−8 残距離が第2の閾値ψ2以下であるかどうかを判断する。残距離が第2の閾値ψ2以下である場合はステップS5−9に進み、残距離が第2の閾値ψ2より長い場合はステップS5−7に戻る。
ステップS5−9 残距離表示エリアm1を消去する。
ステップS5−10 自車位置表示マークmpを移動させる。
ステップS5−11 案内交差点m2を通過したかどうかを判断する。案内交差点m2を通過した場合はステップS5−12に進み、通過していない場合はステップS5−10に戻る。
ステップS5−12 連続交差点フラグに1が立っているかどうかを判断する。連続交差点フラグに1が立っている場合はステップS5−13に、立っていない場合はステップS5−16に進む。
ステップS5−13 案内交差点m7までの残距離を表示する。
ステップS5−14 案内交差点m7を通過したかどうかを判断する。案内交差点m7を通過した場合はステップS5−15に進み、通過していない場合はステップS5−13に戻る。
ステップS5−15 残距離表示エリアm5を消去する。
ステップS5−16 交差点拡大図の表示を解除し、リターンする。
【0079】
本実施の形態においては、車両が案内交差点に差しかかると、交差点拡大図が表示され、該交差点拡大図に残距離が表示されるようになっているが、他の実施の形態においては、交差点拡大図が表示されることなく、地図画面に残距離が表示される。
【0080】
そのために、案内処理手段の交差点判定処理手段は、交差点判定処理を行い、次に通過する交差点があるかどうかを判断し、次に通過する交差点がある場合、前記案内処理手段の残距離算出処理手段は、残距離算出処理を行い、現在地から案内交差点までの残距離を算出する。
【0081】
次に、前記案内処理手段は、図5と同様に、探索経路Rt1、自車位置表示マークmp、残距離表示エリアm1、案内交差点m2等を地図画面に表示する。
【0082】
続いて、前記案内処理手段の自車位置表示処理手段は、自車位置表示処理を行い、現在地の座標に従って自車位置表示マークmpを移動させる。また、この間、案内処理手段の残距離表示処理手段は、残距離表示エリアm1を継続して前記第1の初期位置に表示する。
【0083】
そして、残距離表示エリアm1と自車位置表示マークmpとが重ならなくなった場合、前記自車位置表示マークmpの移動に伴って、残距離表示エリアm1が自車位置表示マークmpに合わせて移動させられる。
【0084】
なお、本発明は前記実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【図面の簡単な説明】
【0085】
【図1】本発明の実施の形態におけるナビゲーションシステムを示すブロック図である。
【図2】本発明の実施の形態におけるナビゲーションシステムの動作を示すメインフローチャートである。
【図3】本発明の実施の形態における拡大図表示処理のサブルーチンを示す第1の図である。
【図4】本発明の実施の形態における拡大図表示処理のサブルーチンを示す第2の図である。
【図5】本発明の実施の形態における交差点拡大図の例を示す第1の図である。
【図6】本発明の実施の形態における交差点拡大図の例を示す第2の図である。
【図7】本発明の実施の形態における交差点拡大図の例を示す第3の図である。
【図8】本発明の実施の形態における交差点拡大図の例を示す第4の図である。
【図9】本発明の実施の形態における交差点拡大図の例を示す第5の図である。
【図10】本発明の実施の形態における交差点拡大図の例を示す第6の図である。
【図11】本発明の実施の形態における交差点拡大図の例を示す第7の図である。
【図12】本発明の実施の形態における交差点拡大図の例を示す第8の図である。
【図13】本発明の実施の形態における交差点拡大図の例を示す第9の図である。
【符号の説明】
【0086】
14 ナビゲーション装置
35 表示部
43 ネットワーク
51 情報センタ
m1、m4、m5 残距離表示エリア
m2、m7 案内交差点
mp 自車位置表示マーク
【特許請求の範囲】
【請求項1】
ナビ情報を取得する情報取得処理手段と、前記ナビ情報に基づいて表示部に地図を表示する表示処理手段と、車両を所定の経路に沿って走行させているときに、所定の案内地点について拡大図を表示する拡大図表示処理手段とを有するとともに、該拡大図表示処理手段は、前記案内地点が複数の案内交差点から成る連続交差点であるかどうかを判断し、前記案内地点が連続交差点である場合に、車両の現在地を表す自車位置表示マークを前記拡大図上に表示し、現在地から前記各案内交差点のうちの第1の案内交差点までの残距離を表示するための第1の残距離表示エリアを前記自車位置表示マークに追随させて表示し、前記第1の案内交差点を通過した後の現在地から前記各案内交差点のうちの第2の案内交差点までの残距離を表示するための第2の残距離表示エリアを前記拡大図上の所定の位置に表示することを特徴とするナビゲーションシステム。
【請求項2】
前記拡大図表示処理手段は、車両が前記第1の案内交差点を通過するまで、第1の案内交差点と第2の案内交差点との間の距離を前記第2の残距離表示エリアに表示する請求項1に記載のナビゲーションシステム。
【請求項3】
前記拡大図表示処理手段は、車両が前記第1の案内交差点を通過した後、現在地から前記第2の案内交差点までの残距離を前記第2の残距離表示エリアに表示する請求項1又は2に記載のナビゲーションシステム。
【請求項4】
前記拡大図表示処理手段は、車両が前記第1の案内交差点を通過した後、前記第1の残距離表示エリアを消去する請求項1〜3のいずれか1項に記載のナビゲーションシステム。
【請求項5】
前記拡大図表示処理手段は、車両が前記第1の案内交差点を通過した後、前記第2の残距離表示エリアの表示色を変化させる請求項1〜4のいずれか1項に記載のナビゲーションシステム。
【請求項6】
コンピュータを、ナビ情報を取得する情報取得処理手段、前記ナビ情報に基づいて表示部に地図を表示する表示処理手段、及び車両を所定の経路に沿って走行させているときに、所定の案内地点について拡大図を表示する拡大図表示処理手段として機能させるとともに、該拡大図表示処理手段は、前記案内地点が複数の案内交差点から成る連続交差点であるかどうかを判断し、前記案内地点が連続交差点である場合に、車両の現在地を表す自車位置表示マークを前記拡大図上に表示し、現在地から前記各案内交差点のうちの第1の案内交差点までの残距離を表示するための第1の残距離表示エリアを前記自車位置表示マークに追随させて表示し、前記第1の案内交差点を通過した後の現在地から前記各案内交差点のうちの第2の案内交差点までの残距離を表示するための第2の残距離表示エリアを前記拡大図上の所定の位置に表示することを特徴とするプログラム。
【請求項1】
ナビ情報を取得する情報取得処理手段と、前記ナビ情報に基づいて表示部に地図を表示する表示処理手段と、車両を所定の経路に沿って走行させているときに、所定の案内地点について拡大図を表示する拡大図表示処理手段とを有するとともに、該拡大図表示処理手段は、前記案内地点が複数の案内交差点から成る連続交差点であるかどうかを判断し、前記案内地点が連続交差点である場合に、車両の現在地を表す自車位置表示マークを前記拡大図上に表示し、現在地から前記各案内交差点のうちの第1の案内交差点までの残距離を表示するための第1の残距離表示エリアを前記自車位置表示マークに追随させて表示し、前記第1の案内交差点を通過した後の現在地から前記各案内交差点のうちの第2の案内交差点までの残距離を表示するための第2の残距離表示エリアを前記拡大図上の所定の位置に表示することを特徴とするナビゲーションシステム。
【請求項2】
前記拡大図表示処理手段は、車両が前記第1の案内交差点を通過するまで、第1の案内交差点と第2の案内交差点との間の距離を前記第2の残距離表示エリアに表示する請求項1に記載のナビゲーションシステム。
【請求項3】
前記拡大図表示処理手段は、車両が前記第1の案内交差点を通過した後、現在地から前記第2の案内交差点までの残距離を前記第2の残距離表示エリアに表示する請求項1又は2に記載のナビゲーションシステム。
【請求項4】
前記拡大図表示処理手段は、車両が前記第1の案内交差点を通過した後、前記第1の残距離表示エリアを消去する請求項1〜3のいずれか1項に記載のナビゲーションシステム。
【請求項5】
前記拡大図表示処理手段は、車両が前記第1の案内交差点を通過した後、前記第2の残距離表示エリアの表示色を変化させる請求項1〜4のいずれか1項に記載のナビゲーションシステム。
【請求項6】
コンピュータを、ナビ情報を取得する情報取得処理手段、前記ナビ情報に基づいて表示部に地図を表示する表示処理手段、及び車両を所定の経路に沿って走行させているときに、所定の案内地点について拡大図を表示する拡大図表示処理手段として機能させるとともに、該拡大図表示処理手段は、前記案内地点が複数の案内交差点から成る連続交差点であるかどうかを判断し、前記案内地点が連続交差点である場合に、車両の現在地を表す自車位置表示マークを前記拡大図上に表示し、現在地から前記各案内交差点のうちの第1の案内交差点までの残距離を表示するための第1の残距離表示エリアを前記自車位置表示マークに追随させて表示し、前記第1の案内交差点を通過した後の現在地から前記各案内交差点のうちの第2の案内交差点までの残距離を表示するための第2の残距離表示エリアを前記拡大図上の所定の位置に表示することを特徴とするプログラム。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】

【図11】

【図12】
【図13】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2009−14737(P2009−14737A)
【公開日】平成21年1月22日(2009.1.22)
【国際特許分類】
【出願番号】特願2008−224139(P2008−224139)
【出願日】平成20年9月1日(2008.9.1)
【分割の表示】特願2003−178630(P2003−178630)の分割
【原出願日】平成15年6月23日(2003.6.23)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成21年1月22日(2009.1.22)
【国際特許分類】
【出願日】平成20年9月1日(2008.9.1)
【分割の表示】特願2003−178630(P2003−178630)の分割
【原出願日】平成15年6月23日(2003.6.23)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]