
ナビゲーションシステム

【課題】 運転手が自車の現在位置や進行方向を容易に理解することのできるナビゲーションシステムを提供する。
【解決手段】 地図を表示する表示装置4と、車両の乗員の視点で描画された進行方向の景観である乗員視点地図上に山を描画して表示装置4に表示させる制御装置3とを備えている。
【解決手段】 地図を表示する表示装置4と、車両の乗員の視点で描画された進行方向の景観である乗員視点地図上に山を描画して表示装置4に表示させる制御装置3とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、自己の現在位置、案内経路、渋滞予測情報等を地図とともに表示するナビゲーションシステムに関し、特に車両の乗員の視点で自車の進行方向の景観を表示する技術に関する。
【背景技術】
【0002】
従来、ナビゲーションシステムの1つとして、運転手が目的地に容易に到着できるように支援を行うカーナビゲーション装置が知られている。このカーナビゲーション装置は、CD(Compact Disc)、DVD(Digital Versatile Disk)といった記憶媒体やHDD(Hard Disk Drive)装置に格納された2次元座標の地図データを取得し、この取得した地図データに基づいて表示装置の画面上に道路、建物、空等を含む地図を表示するとともに、GPS(Global Positioning System)やジャイロを用いて自車の現在位置や自車が向いている方向を検出して地図上に表示し、さらに、VICS(Vehicle information and Communication System)情報等を用いて渋滞予測情報を地図上に表示する。
【0003】
カーナビゲーション装置で表示される地図の種類としては、2D地図、鳥瞰図、乗員視点地図などが知られている。2D地図は、上空から地面を垂直に見下ろしたように描かれた2次元の地図である。鳥瞰図は、恰も上空の鳥が見ているように、運転手の斜め手前上空から自車の進行方向の地面を見下ろしたように描かれた3次元の地図である。さらに、乗員視点地図は、運転手または助手席の乗員の視点で進行方向を見たように描かれた3次元の地図である。乗員視点地図は、運転手の視点で見た実際の景色に近い景色が表示されるので、地図と実際の道路との対応が直感的に理解できるという特徴を有する。
【0004】
なお、3次元の地図を表示する技術として、特許文献1は、山並み表示を行うことのできるナビゲーション装置における地図情報表示装置を開示している。この地図情報表示装置では、地図データとして、標高データを予め記憶させておき、鳥瞰図表示した際の所定の遠方領域に設けた擬似地平線上よりも、奧側の標高データを、地平面上の視点からの視線方向ごとに取得する。そして、それらのうち、最も大きな値の標高データを擬似地平線上のデータとして、鳥瞰図変換を行って、地図表示を行う。
【0005】
また、特許文献2は、地形・道路等の三次元の地図情報に基づいて立体的な地図を表示するナビゲーション装置において、走行道路に起伏が存在しても、自車の移動に伴って視点高度や視線を再設定することにより、スムーズに景観を更新するナビゲーション装置を開示している。このナビゲーション装置は、現在位置検出部により自車の現在位置が更新されると、自車付近の地図データを、データ読み込み部を介して地図データベースから読み込み、該地図データに含まれている自車周辺の地形高度データを参照し、視点設定部により地形高度よりも高い位置に視点を再設定した後、表示処理部により座標変換を行って、設定した視点から眺めた透視地図を表示する。
【0006】
また、地図データに基づき地形を解析する技術として、特許文献3は、対象領域における情報分布を適正化して、地形解析などの精度を向上させることができる地形情報処理方法および装置を開示している。この地形情報の処理装置は、多種の地形情報を複数の縮尺で蓄積する大容量記憶手段から処理情報を入力する地形入力手段、入力された情報を記憶するメモリ、地形情報を表示情報に変換する地形表示手段、指定された解析処理をする地形解析手段、解析結果を表示情報に変換する解析結果表示手段及び処理内容の指示や結果の表示を行う入出力手段を備える。地形解析手段は解析領域での地形情報の分布を求め、情報量の少ない(多い)ところは他の縮尺の地形情報などにより適正化し、目的の解析を行う。これにより、地形情報処理の均質化、特に地形解析の精度を向上させることができ、ユーザの望む好適な情報を提供できる。また、この特許文献3には、ナビゲーションシステムとしては実現されていないが、地図データから等高線を取得し、ユーザが設定する任意の2点を結ぶ線分で等高線との交点を求め、線分が分断する地面の断面図を表示する技術も開示されている。
【0007】
【特許文献1】特開平10−307034号公報
【特許文献2】特開平10−143066号公報
【特許文献3】特許第2644935号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところで、運転手は、自車の現在位置や方角を認識する場合、周りの建物の配置や特定施設(例えば東京タワー等)を見て確認する。従って、山岳地帯などといった周りに建物や特定施設が少ない場所では、自車の現在位置や方角を認識することができない。また、カーナビゲーション装置は、ハードウェアやソフトウェアの制限もあることから、情報量の多い地図データを備えることができず、また、描画モデルもデフォルメする必要がある。このため、3次元地図を画面に表示をした際には、実際の背景に近い絵にはなるものの、建物の位置や壁の模様といった詳細な部分が異なるため、運転手は、自車の現在位置、進行方向を認識することが容易ではない。
【0009】
このような問題を解消するために、背景に山を描画する方法が知られている。この方法は、運転手の視点での景観を表示する乗員視点地図では実現されていないが、運転手の視点より高い視点での景観を表示する鳥瞰図において実現されている。鳥瞰図では、上述した特許文献1に示されているように、地図上に存在する自車の現在位置から一定距離だけ離れた地形メッシュの標高を取得し、背景として描画している。この方法だと、山の起伏を詳細に表現できず、実際の山と大きく異なるので、現在地の確認が容易にできない。
【0010】
この発明は、上述した問題を解消するためになされたものであり、その目的は、運転手が自車の現在位置や進行方向を容易に理解することのできるナビゲーションシステムを提供することにある。
【課題を解決するための手段】
【0011】
この発明に係るナビゲーションシステムは、上記課題を達成するために、地図を表示する表示装置と、車両の乗員の視点で描画された進行方向の景観である乗員視点地図上に山を描画して表示装置に表示させる制御装置とを備えている。
【発明の効果】
【0012】
この発明によれば、車両の乗員の視点で描画された進行方向の景観である乗員視点地図上に山を描画して表示するように構成したので、運転手は、自車の現在位置や進行方向を容易に理解することができる。
【発明を実施するための最良の形態】
【0013】
以下、この発明の実施の形態を、図面を参照しながら詳細に説明する。
実施の形態1.
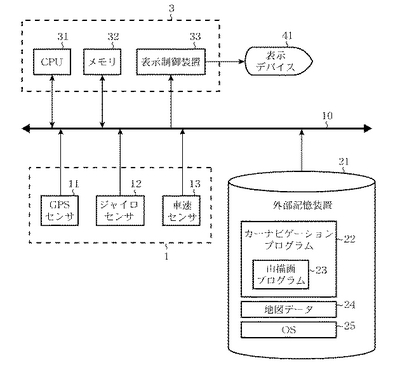
図1は、この発明の実施の形態1に係るナビゲーションシステムの機能的な構成を示すブロック図である。このナビゲーションシステムは、入力装置1、記憶装置2、制御装置3および表示装置4から構成されている。
【0014】
入力装置1は、自車の現在位置、走行速度、進行方向の方位などを制御装置3に入力する。記憶装置2は、地図データを格納する。地図データには、標高データ(等高線データ)、建物データ、道路データなどが含まれる。この記憶装置2に格納されている地図データは、制御装置3によって読み出される。
【0015】
制御装置3は、この発明の山描画データ作成手段に対応し、ナビゲーションシステムの全体を制御する。例えば、制御装置3は、入力装置1から自車の現在位置および進行方向の方位が入力されると、記憶装置2から自車の現在位置の周辺の地図データを読み出し、この読み出した地図データに含まれる標高データに基づき山を描画するための山描画データを生成して表示装置4に送る。表示装置4は、制御装置3から送られてくる山描画データに基づき背景に山を有する乗員視点地図を表示する。
【0016】
図2は、図1に示したナビゲーションシステムの詳細なハードウェア構成を示すブロック図である。なお、この実施の形態1に係るナビゲーションシステムでは、制御装置3をCPU(Central Processing Unit)を用いて構成しているが、CPUの代わりに、ハードウェアロジックで構成することもできる。
【0017】
このナビゲーションシステムは、バス10によって接続されたGPSセンサ11、ジャイロセンサ12、車速センサ13、外部記憶装置21、CPU31、メモリ32および表示制御装置33から構成されており、表示制御装置33には、表示デバイス41が接続されている。GPSセンサ11、ジャイロセンサ12および車速センサ13は、上述した入力装置1に対応し、外部記憶装置21は記憶装置2に対応する。また、CPU31、メモリ32および表示制御装置33は制御装置3に対応し、表示デバイス41は表示装置4に対応する。
【0018】
GPSセンサ11は、衛星軌道上に存在する複数のGPS衛星(図示しない)から送られてくる電波を受信することによって得られたGPS信号に基づいて所定の計算を行うことにより自車の現在位置を検出する。このGPSセンサ11で検出された現在位置(緯度、経度および高度)は、現在位置データとしてバス10を経由してCPU31に送られる。ジャイロセンサ12、自車が進行している方向の方位を検出する。このジャイロセンサ12で検出された進行方向の方位は、方位データとしてバス10を経由してCPU31に送られる。車速センサ13は、車両が所定距離だけ走行したことを検出するごとに車速パルスを発生し、車速データとして出力する。この車速センサ13から出力される車速データは、バス10を経由してCPU31に送られる。
【0019】
外部記憶装置21は、CD、DVDといった記憶媒体のドライブ装置またはHDD装置から構成されている。この外部記憶装置21には、カーナビゲーションプログラム22、山描画プログラム23、地図データ24およびオペレーティングシステム(OS)25が格納されている。なお、山描画プログラム23は、カーナビゲーションプログラム22の一部である。外部記憶装置21に記憶されている内容は、必要に応じてCPU31によって読み出される。
【0020】
CPU31は、GPSセンサ11、ジャイロセンサ12、車速センサ13、外部記憶装置21、メモリ32および表示制御装置33との間でバス10を経由してデータを送受することにより、このナビゲーションシステムの全体を制御する。メモリ32は、種々のデータを一時的に保持する。このメモリ32は、CPU31によってアクセスされる。表示制御装置33は、山を表示するための演算を行う専用演算器から構成されている。この表示制御装置33は、CPU31から送られてくる山描画データに基づいて山を表示するための表示データを生成し、表示デバイス41に送る。表示デバイス41は、例えば液晶ディスプレイ装置から構成されており、表示制御装置33から送られてくる表示データに従って、背景に山が含まれる乗員視点地図を表示する。
【0021】
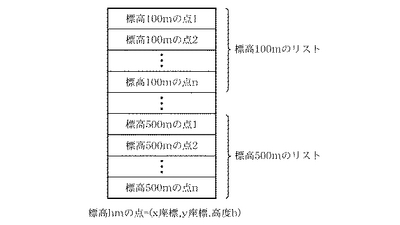
次に、この実施の形態1に係るナビゲーションシステムで使用される地図データに含まれる標高データ(等高線データ)の外部記憶装置21への格納形式を説明する。図3は、外部記憶装置21に格納されている地図データに含まれる標高データの格納形式を示す図である。標高データは、標高ごとに用意された標高リストから構成されており、各標高リストは、標高を表す複数の点から構成されている。複数の点の各々は座標値(座標x、座標y、高度h)で定義されており、また、複数の点の各々に対してはアドレスが割り振られている。各標高リストに含まれる複数の点を順次結ぶことにより1つの高度に対する等高線が形成される。
【0022】
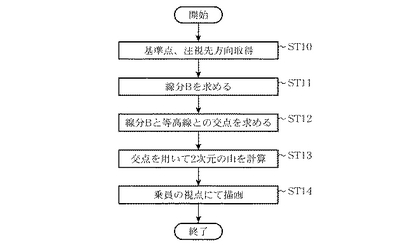
次に、上記のように構成される、この発明の実施の形態1に係るナビゲーションシステムの概略の動作を、山描画プログラム23によって実行される山描画処理を中心に、図4に示すフローチャートを参照しながら説明する。
【0023】
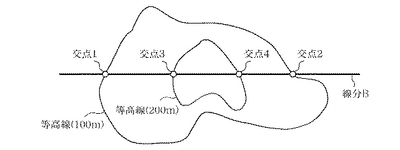
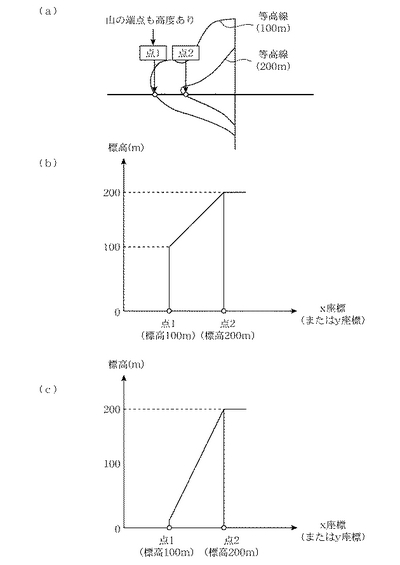
山描画処理では、まず、基準点および注視先方向が取得される(ステップST10)。具体的には、CPU31は、GPSセンサ11から取得した現在位置データ、ジャイロセンサ12から取得した方位データおよび車速センサ13から取得した車速データに基づき自車の現在位置を計算して基準点とするとともに、自車の進行方向の方位を計算して注視先方向の方位とする。図5は、自車の現在位置を基準点とし、自車の進行方向(注視先方向)に高度100mの等高線と高度200mの等高線を有する山が存在する状態を示している。なお、この実施の形態1では、基準点として自車の現在位置を用いているが、基準点としては自車の現在位置に限らず、ユーザが任意の位置を設定するように構成することもできる。例えば、基準点として、自車から後方に所定距離だけ離れた位置を設定するように構成できる。
【0024】
次いで、線分Bが求められる(ステップST11)。すなわち、図5に示すように、自車の現在位置(基準点)を始点として進行方向へ延びる半直線Aに直交し、自車の現在位置から所定の距離だけ離れた位置に存在する線分Bが求められる。なお、線分Bは半直線Aに対して厳密に直交する必要はなく、直交に近い角度で交差するように構成することもできる。この発明で言う交差には、直交および直交に近い角度で交差する場合を含む。
【0025】
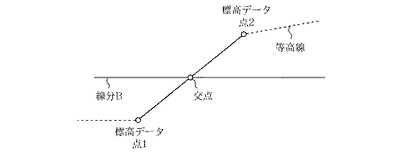
次いで、線分Bと等高線との交点が求められる(ステップST12)。図6は、線分Bと等高線との交点を求める方法を説明するための図である。交点は、以下のようにして算出される。まず、地図データに含まれる標高データから隣り合う2点(例えば、点1と点2)のxy座標が取得され、これら2点を結ぶ直線と線分Bとの交点の有無が調べられる。そして、交点が存在する場合は、その交点の3次元座標(x、y、h)の値が交点データとしてメモリ32に格納される。次いで、標高データから次の隣り合う2点(例えば、点2と点3)のxy座標が取得され、これら2点を結ぶ直線と線分Bとの交点の有無が調べられる。そして、交点が存在する場合は、その交点の3次元座標(x、y、h)が交点データとしてメモリ32に格納される。以下同様にして、1つの等高線に対する全ての隣り合う2点間について線分Bとの交点の有無が調べられて交点が求められる。1つの等高線に対する交点の算出が完了すると、次の等高線に対する交点が算出される。
【0026】
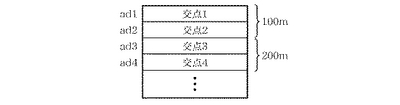
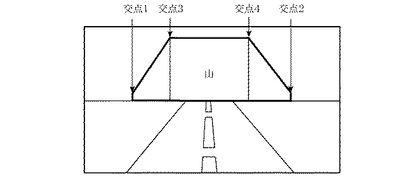
ステップST12の処理により、例えば図7に示すような、高度100mの等高線と高度200mの等高線を有する地図であれば、高度100mの等高線と線分Bとの交点として交点1および交点2が求められ、高度200mの等高線と線分Bとの交点として交点3および交点4が求められる。この場合、各等高線ごとに交点が計算されるので、メモリ32には、図8に示すように、交点1〜交点4の3次元座標(x、y、h)が、交点1→交点2→交点3→交点4の順番で格納される。
【0027】
次いで、ステップST12で求められた交点を用いて2次元の山が計算される(ステップST13)。すなわち、メモリ32に格納された複数の交点データのz軸の値(標高=h)をz座標上で結ぶことにより、厚みのない2次元の山を表す山描画データが生成される。この際、メモリ32に格納されている交点データが先頭から2つずつ順番に取得されて山の形状が描画される。
【0028】
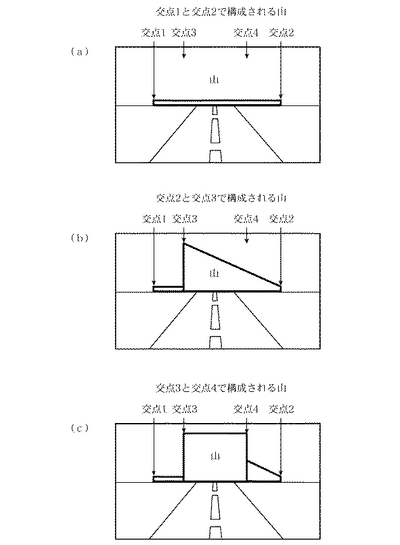
今、図8に示すような交点データがメモリ32に格納されているものとすると、まず、交点1と交点2の座標値をメモリ32から取得して山が描画される。これにより、図9(a)に示すような山の形状が得られる。次に、交点2と交点3の座標値をメモリ32から取得して山が描画される。これにより、図9(b)に示すような山の形状が得られる。次に、交点3と交点4の座標値をメモリから取得して山が描画される。これにより、図9(c)に示すような山の形状が得られ、これが最終的に描画される山の形状になる。従って、実際の山とはかけ離れた形状の山が描画されることになる。
【0029】
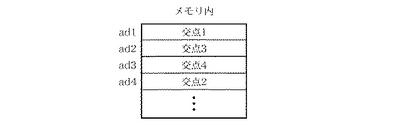
このような事態を回避するために、この実施の形態1では、等高線ごとにメモリ32に格納されている交点データが、x座標またはy座標の値に従って並び替えられる。この処理では、図10に示すように、東方向(方位)と自車の進行方向(方位)とがなす角θによって並び替えが行われる。すなわち、角θが0゜<θ<180゜または180゜<θ<360゜の時はx座標の値の大きい順または小さい順に並び替えが行われる。角θが0゜または180゜の時は、x座標の値がすべての点で同じであるので、y座標の値の大きい順または小さい順に並び替えられる。この処理により、メモリ32に格納されている交点データは、図11に示すように、交点1→交点3→交点4→交点2の順番に並び替えられる。
【0030】
次に、山の端点になる交点の高度が地表に近い高度に補正される。図12(a)に示すように、山の端点も高度を持っているので、その高度を用いて山を描画すると、図12(b)に示すように山の端がすべて崖として表示される。そこで、山の端点となる交点、すなわちメモリ32の最初に格納された交点と最後に格納された交点の高度を地表に近い所定の高度に置き換える処理が行われる。これにより、図12(c)に示すように、山の端をなだらかに描画することが可能となる。
【0031】
なお、山の端点となる交点の高度の補正は、山の端点の高度から自車の現在位置の高度を差し引くことによって行うこともできる。例えば、自車の現在位置の高度が80mであれば、図12(a)における点1の高度100mから80mを差し引いて、山の端点である点1の高度を20mに補正することができる。この場合、自車の現在位置の高度は、地図データまたはGPSセンサ11からのGPSデータに基づいて算出することができる。このように、山の端点の高度を補正することにより、描画される山の形状を、運転手が実際に見る形状に近づけることが可能になり、より自然な形状の山を描画することができる。
【0032】
次いで、乗員の視点で描画する処理が実行される(ステップST14)。すなわち、メモリ32に格納されている交点データを表示制御装置33にて描画用に加工し、表示デバイス41に表示させることにより、乗員の視点で山を表示することが可能になる。上述した処理により得られる交点は等高線と線分Bとが交わる点であるので、描画される山は、図13に示すように、奥行きのない2次元の板状の山となる。2次元の板状の山とは厚みの無い平面状の山の断面図を指す。自車進行方向横から見ると図13に示すような山となる。これを乗員の視点で画面に描画すると図14に示すように表示される。
【0033】
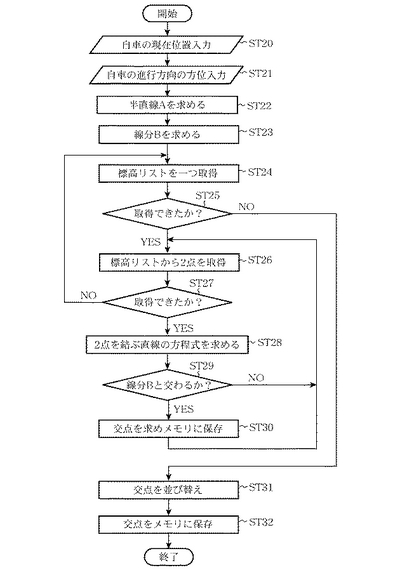
次に、上述した動作を実現するために山描画プログラム23によって行われる山描画処理の詳細を、図15に示すフローチャートを参照しながら説明する。山描画処理では、まず、自車の現在位置が入力される(ステップST20)。すなわち、CPU31は、GPSセンサ11から現在位置データを取得する。この現在位置データによって指定される自車の現在位置が基準点として決定される。次いで、自車の進行方向の方位が入力される(ステップST21)。すなわち、CPU31は、ジャイロセンサ12から取得した方位データと車速センサ13から取得した車速データとに基づき自車の進行方向(注視先方向)の方位を決定する。
【0034】
次いで、半直線Aが求められる(ステップST22)。具体的には、CPU31は、ステップST20で決定された基準点とステップST21で決定された自車の進行方向(注視先方向)の方位とに基づき、自車の現在位置を始点とし、自車の進行方向の方位へ伸びる半直線Aを求める。次いで線分Bが求められる(ステップST23)。すなわち、CPU31は、半直線Aと直交し、自車から所定の距離だけ離れた線分Bを求める。
【0035】
次いで、1つの標高リストの取得が試みられる(ステップST24)。具体的には、CPU31は、外部記憶装置21の地図データ24に含まれる標高データから、1つの標高リストの取得を試みる。次いで、標高リストを取得できたかどうかが調べられる(ステップST25)。ここで、標高リストを取得できたことが判断されると、次いで、標高リストから隣り合う2点の取得が試みられる(ステップST26)。次いで、2点を取得できたかどうかが調べられる(ステップST27)。ここで、2点を取得できたことが判断されると、これら2点を結ぶ直線の方程式が求められる(ステップST28)。
【0036】
次いで、ステップST28で求められた2点を結ぶ直線と線分Bとが交わるかどうかが調べられる(ステップST29)。ここで、交わることが判断されると、2点を結ぶ直線と線分Bとの交点が求められ、メモリ32に保存される(ステップST30)。その後、シーケンスはステップST26に戻り、以下同様の処理が繰り返される。上記ステップST29において2点を結ぶ直線と線分Bとが交わらないことが判断された場合もシーケンスはステップST26に戻る。
【0037】
これらステップST26〜ST30の繰り返し実行の途中で、ステップST27において、標高リストを取得できないことが判断されると、1つの等高線に対する処理は終了したものと認識され、シーケンスはステップST24に戻り、以下、上述した処理が繰り返される。そして、ステップST24〜ST30の繰り返し実行の途中で、ステップST25において、標高リストを取得できないことが判断されると、全ての標高リストに対する処理は完了したものと認識され、シーケンスはステップST31に進む。この時点で、例えば図8に示すように、全ての等高線に対する交点1〜交点4の3次元座標(x、y、h)が、メモリ32に、交点1→交点2→交点3→交点4の順番で格納される。
【0038】
ステップST31では、交点の並び替えが行われる。すなわち、CPU31は、メモリ32に格納されている交点データを、そのx座標またはy座標の値に従って並び替える(詳細は上述した通りである)。次いで、並び替えられた交点がメモリ32に保存される(ステップST32)。これにより、例えば図11に示すように、交点1→交点3→交点4→交点2の順番に並び替えられた交点データがメモリ32に得られる。このメモリ32に得られた交点データに基づき描画が行われることにより、背景に山を含む乗員視点地図が表示デバイス41に表示される。
【0039】
以上説明したように、この発明の実施の形態1に係るナビゲーションシステムによれば、自車の現在位置を始点として進行方向へ延びる半直線Aと直交する線分Bと等高線との交点を取得してメモリ32に格納し、このメモリ32に格納された最初の交点データと最後の交点データの高度を地表近くになるように補正し、それらの交点を用いて山を描画することにより、実際の背景に近い山を表示することができる。
【0040】
実施の形態2.
この発明の実施の形態2に係るナビゲーションシステムは、自車の現在位置から所定の距離に存在する山のみならず、さらに他の距離に存在する山をも表示するようにしたものである。この実施の形態2に係るナビゲーションシステムの機能的な構成およびハードウェア構成は、図1および図2に示した実施の形態1に係るナビゲーションシステムのそれらと同じである。
【0041】
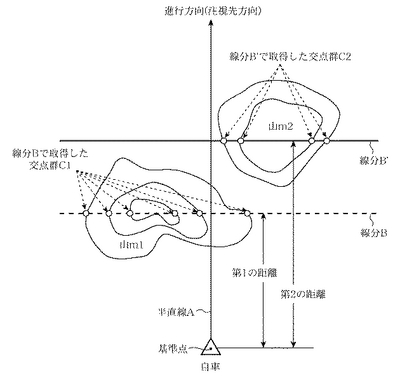
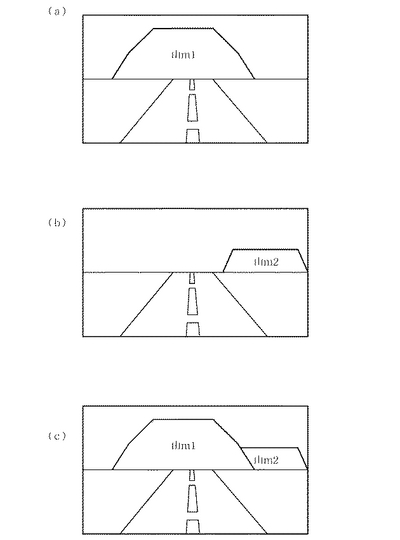
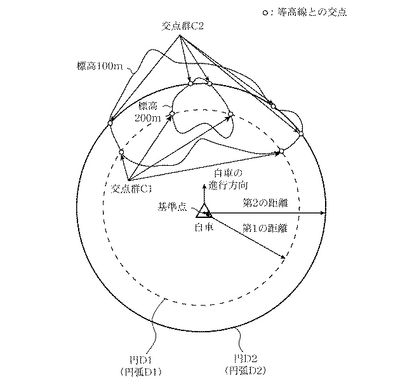
この発明の実施の形態2に係るナビゲーションシステムの動作を説明する。図16は、実施の形態2に係るナビゲーションシステムの山描画処理を説明するための図であり、自車の現在位置を基準点とし、自車の進行方向(注視先方向)に山m1と山m2が存在する状態を示している。実施の形態2に係るナビゲーションシステムの概略の動作は以下の通りである。すなわち、自車の現在位置(基準点)を始点として進行方向へ延びる半直線Aに直交し、自車の現在位置から第1の距離だけ離れた位置に存在する線分Bおよび第2の距離だけ離れた位置に存在する線分B’が求められる。そして、山m1と線分Bとの交点群c1および山m2と線分B’との交点群c2が取得される。
【0042】
その後、図17(a)に示すように、交点群c1を用いて山m1が描画される。次に、図17(b)に示すように、交点群c2を用いて山m2が描画される。次に、図17(c)に示すように、これら山m1および山m2が合成されて表示される。この場合、交点群c2は交点群c1より自車の現在位置から遠い位置に存在するので、交点群c2により形成される山m2は、交点群c1により形成される山m1の後方に存在するように表示される。すなわち、山m1と山m2とが重複する部分については、山m2の一部が山m1に隠れるように表示される。
【0043】
なお、図16および図17に示した例では、半直線Aに直交する2つの線分Bおよび線分B’を用いて山を描画する例について説明したが、半直線Aに直交する線分は2つに限らず、3つ以上の数とすることもできる。半直線Aに直交する線分の数を増加することによって、より実際の風景に近い山を描画することができる。
【0044】
次に、上述した動作を実現するために山描画プログラムによって行われる山描画処理の詳細を、図18に示すフローチャートを参照しながら説明する。なお、図15のフローチャートに示した実施の形態1に係るナビゲーションシステムにおける山描画処理と同一の処理を行うステップには同一の符号を付し、説明を簡略化する。
【0045】
山描画処理では、まず、自車の現在位置が入力される(ステップST20)。次いで、自車の進行方向の方位が入力される(ステップST21)。次いで、半直線Aが求められる(ステップST22)。次いで、カウンタのカウント値iがゼロに初期化される(ステップST40)。このカウンタは、CPU31の内部に設けられるものであり、半直線Aに直交する線分の数を計数するために使用される。次いで、カウント値iが設定された値を超えたかどうかが調べられる(ステップST41)。ここで、設定された値は、半直線Aに直交する線分の数を表し、ユーザがあらかじめ設定できるようになっている。
【0046】
次いで線分Bが求められる(ステップST23)。次いで、1つの標高リストの取得が試みられ(ステップST24)、標高リストを取得できたかどうかが調べられる(ステップST25)。ここで、標高リストを取得できたことが判断されると、次いで、標高リストから隣り合う2点の取得が試みられ(ステップST26)、2点を取得できたかどうかが調べられる(ステップST27)。ここで、2点を取得できたことが判断されると、これら2点を結ぶ直線の方程式が求められる(ステップST28)。
【0047】
次いで、ステップST28で求められた2点を結ぶ直線と線分Bとが交わるかどうかが調べられ(ステップST29)、交わることが判断されると、2点を結ぶ直線と線分Bとの交点が求められてメモリ32に保存される(ステップST30)。その後、シーケンスはステップST26に戻り、以下同様の処理が繰り返される。上記ステップST29において2点を結ぶ直線と線分Bとが交わらないことが判断された場合もシーケンスはステップST26に戻る。
【0048】
これらステップST26〜ST30の繰り返し実行の途中で、ステップST27において、標高リストを取得できないことが判断されると、1つの等高線に対する処理は終了したものと認識され、シーケンスはステップST24に戻り、以下、上述した処理が繰り返される。そして、ステップST24〜ST30の繰り返し実行の途中で、ステップST25において、標高リストを取得できないことが判断されると、全ての標高リストに対する処理は完了したものと認識され、シーケンスはステップST31に進む。この時点で、半直線Aに直交する1つの線分と全ての等高線との交点の3次元座標(x、y、h)が、メモリ32に格納される。
【0049】
ステップST31では、交点の並び替えが行われる。そして、並び替えられた交点がメモリ32に保存される(ステップST32)。次いで、線分Bが一定距離だけ遠ざけられる(ステップST42)。すなわち、CPU31は、線分Bを一定距離だけ移動させた線分(図16の線分B’)を算出する。次いで、カウント値iがインクリメント(+1)される(ステップST43)。その後、シーケンスはステップST41に戻り、上述した処理が繰り返される。これらステップST41〜ST43の繰り返し実行の途中で、ステップST41において、カウント値iが設定された値を超えたことが判断されると、あらかじめ設定された、半直線Aに直交する全ての線分に対する処理が完了したものと認識され、処理は終了する。以上の処理により、半直線Aに直交する複数の線分と山を表す等高線との交点群が取得される。
【0050】
その後、半直線Aに直交する複数の線分の各々について、交点群を結ぶことによって複数の山が描画され、これらが合成されて表示される。この合成の際には、遠くの山と近くの山が重複する部分については、遠くの山の一部が近くの山に隠れるように合成される。従って、遠くの山が近くの山に隠れる部分については、遠くの山を描画するための計算を省略することが可能となり、省略した場合、処理の高速化が可能となる。
【0051】
以上説明したように、この発明の実施の形態2に係るナビゲーションシステムによれば、自車の現在位置を始点とし、進行方向へ向いた半直線Aに直交する複数の線分と等高線との交点を求め、この求めた交点に基づき山を描画するように構成したので、自車が移動することによる山の形状の変化を抑えて、より実際の背景に近い形状を有する山を描画することができる。
【0052】
なお、この実施の形態2に係るナビゲーションシステムにおいては、半直線Aに直交する複数の線分の各々について描画される山の色を異なるように構成できる。例えば、近くの山は濃い色で描画し、遠くの山は薄い色で描画するように構成できる。この構成によれば、乗員視点地図に描画される山に遠近感を持たせることができるので、さらに実際の背景に近い山を描画することができる。
【0053】
実施の形態3.
この発明の実施の形態3に係るナビゲーションシステムは、実施の形態2に係るナビゲーションシステムにおいて、半直線Aに直交する複数の線分の間隔を、自車の現在位置から所定の距離以内では狭くし、所定の距離以上では広くするようにしたものである。この実施の形態3に係るナビゲーションシステムの機能的な構成およびハードウェア構成は、図1および図2に示した実施の形態1に係るナビゲーションシステムのそれらと同じである。
【0054】
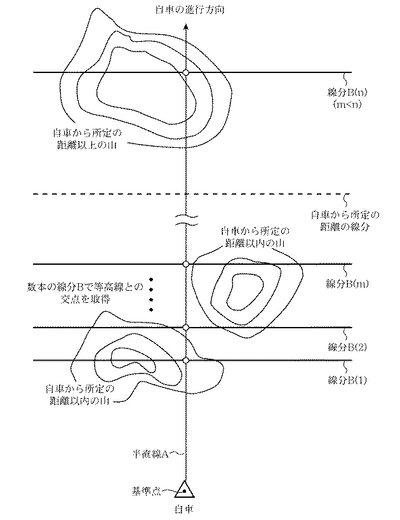
この発明の実施の形態3に係るナビゲーションシステムの動作を説明する。図19は、このナビゲーションシステムの山描画処理を説明するための図であり、自車の現在位置を基準点とし、自車の進行方向(注視先方向)に複数の山が存在する状態を示している。このナビゲーションシステムでは、自車の現在位置(基準点)を始点として進行方向へ延びる半直線Aに直交する線分として、自車の現在位置から所定の距離(図19では破線で示す)以内では狭い間隔の複数の線分B(1)、B(2)、・・・、B(m)が求められ、自車の現在位置から所定の距離以上では広い間隔の複数の線分B(n)が求められる。そして、これら複数の線分と等高線との交点群が取得される。
【0055】
その後、半直線Aに直交する複数の線分の各々について、交点群を結ぶことによって複数の山が描画され、これらが合成されて表示される。この合成の際には、遠くの山と近くの山が重複する部分については、遠くの山の一部が近くの山に隠れるように表示される。
【0056】
以上説明したように、この発明の実施の形態3に係るナビゲーションシステムによれば、自車の現在位置から所定の距離以内では、半直線Aに直交する複数の線分の間隔を狭くし、所定の距離以上では、半直線Aに直交する線分の間隔を広くするように構成したので、近くの山は詳細に描画されるが、遠くの山は粗に描画される。従って、遠くの山を描画するための処理時間を短縮することができ、全体としてナビゲーションシステムの処理速度を向上させることができる。
【0057】
実施の形態4.
この発明の実施の形態4に係るナビゲーションシステムは、実施の形態2に係るナビゲーションシステムにおいて、半直線Aに直交する複数の線分の間隔を、自車の現在位置から遠くになるに従って広くするようにしたものである。この実施の形態4に係るナビゲーションシステムの機能的な構成およびハードウェア構成は、図1および図2に示した実施の形態1に係るナビゲーションシステムのそれらと同じである。
【0058】
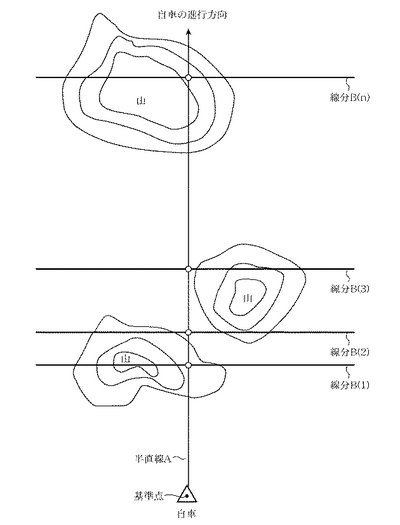
この発明の実施の形態4に係るナビゲーションシステムの動作を説明する。図20は、このナビゲーションシステムの山描画処理を説明するための図であり、自車の現在位置を基準点とし、自車の進行方向(注視先方向)に複数の山が存在する状態を示している。このナビゲーションシステムでは、自車の現在位置(基準点)を始点として進行方向へ延びる半直線Aに直交する線分として、自車の現在位置から離れるに連れて等比間隔で広がる複数の線分B(1)、B(2)、B(3)、・・・、B(n)が求められる。各線分B(1)、B(2)、B(3)、・・・、B(n)までの距離は、下記式(1)に従って求めることができる。
自車の現在位置から線分B(1)までの距離×rn-1・・・(1)
ここで、rは所定の公比、nは自車の現在位置から順番に付された線分Bの番号である。
【0059】
次いで、上記のようにして求められた複数の線分と等高線との交点群が取得される。その後、半直線Aに直交する複数の線分の各々について、交点群を結ぶことによって複数の山が描画され、これらが合成されて表示される。この合成の際には、遠くの山と近くの山が重複する部分については、遠くの山の一部が近くの山に隠れるように表示される。
【0060】
以上説明したように、この発明の実施の形態4に係るナビゲーションシステムによれば、自車の現在位置から離れるに連れて等比間隔で広がる複数の線分に基づいて山を描画するように構成したので、近くの山は詳細に描画されるが、遠くの山になるに連れて粗に描画される。従って、遠くの山を描画するための処理時間を短縮することができ、全体としてナビゲーションシステムの処理速度を向上させることができる。
【0061】
実施の形態5.
この発明の実施の形態5に係るナビゲーションシステムは、実施の形態2に係るナビゲーションシステムにおいて、半直線Aに直交する複数の線分として、山の頂上を通る線分を用いるようにしたものである。この実施の形態4に係るナビゲーションシステムの機能的な構成およびハードウェア構成は、図1および図2に示した実施の形態1に係るナビゲーションシステムのそれらと同じである。
【0062】
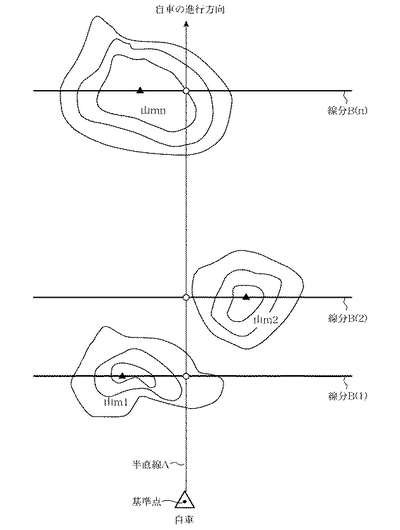
この発明の実施の形態5に係るナビゲーションシステムの動作を説明する。図21は、このナビゲーションシステムの山描画処理を説明するための図であり、自車の現在位置を基準点とし、自車の進行方向(注視先方向)に複数の山が存在する状態を示している。このナビゲーションシステムでは、自車の現在位置(基準点)を始点として進行方向へ延びる半直線Aに直交する線分として、自車の現在位置から近い順番に、山m1の山頂点を通る線分B(1)、山m2の山頂点を通る線分B(2)、・・・、山mnの山頂点を通る線分B(n)が求められる。
【0063】
次いで、上記のようにして求められた複数の線分と等高線との交点群が取得される。その後、半直線Aに直交する複数の線分の各々について、交点群および山頂点を結ぶことによって複数の山が描画され、これらが合成されて表示される。この合成の際には、遠くの山と近くの山が重複する部分については、遠くの山の一部が近くの山に隠れるように表示される。
【0064】
以上説明したように、この発明の実施の形態5に係るナビゲーションシステムによれば、自車の現在位置の進行方向に存在する山の山頂点を通る複数の線分に基づいて山頂が含まれる形状の山を描画するように構成したので、例えば図14に示すような山頂が存在しない平らな山ではなく、山頂を有する山が描画される。従って、より実際の背景に近い形状を有する山を描画することができる。また、「山頂を通る線分」と等高線との交点を求める事により、自車位置から山までの距離によらず、等高線との交点は同じ位置となるため、進行方向が同じであれば、常に同じ形状の山を描画することができる。
【0065】
実施の形態6.
この発明の実施の形態6に係るナビゲーションシステムは、実施の形態1に係るナビゲーションシステムにおいて、半直線Aに直交する直線の代わりに、自車の現在位置(基準点)を中心とする円または円弧を用いたものである。この実施の形態6に係るナビゲーションシステムの機能的な構成およびハードウェア構成は、図1および図2に示した実施の形態1に係るナビゲーションシステムのそれらと同じである。
【0066】
この発明の実施の形態6に係るナビゲーションシステムの概略の動作を、山描画プログラム23によって実行される山描画処理を中心に、図22に示す説明図を参照しながら説明する。山描画処理では、まず、実施の形態1の場合と同様の方法で、基準点が取得される。次いで、円または円弧が求められる。すなわち、図22に示すように、自車の現在位置(基準点)を中心として所定の距離を半径とする円または円弧が求められる。なお、円または円弧は厳密な円または円弧である必要はなく、例えば楕円または楕円弧であってもよい。この発明で言う曲線には、円および円弧の他に、楕円または楕円弧を含む。次いで、円または円弧と等高線との交点が求められ、この求められた交点に基づいて山が描画される。以下の処理は、実施の形態1の場合と同じである。
【0067】
以上説明したように、この発明の実施の形態6に係るナビゲーションシステムによれば、乗員から等距離にある山が平面に展開されて描画されるので、より実際の背景に近い山を描画することができる。
【0068】
実施の形態7.
この発明の実施の形態7に係るナビゲーションシステムは、自車の現在位置から所定の距離の半径位置に存在する山のみならず、さらに他の距離の半径位置に存在する山をも表示するようにしたものである。この実施の形態7に係るナビゲーションシステムの機能的な構成およびハードウェア構成は、図1および図2に示した実施の形態1に係るナビゲーションシステムのそれらと同じである。
【0069】
次に、この発明の実施の形態7に係るナビゲーションシステムの動作を説明する。図23は、このナビゲーションシステムの山描画処理を説明するための図であり、自車の現在位置を基準点とし、自車の進行方向に山が存在する状態を示している。このナビゲーションシステムでは、自車の現在位置(基準点)を中心として半径方向へ第1の距離だけ離れた位置に存在する円または円弧D1および第2の距離だけ離れた位置に存在する円または円弧D2が求められる。そして、山と円または円弧D1との交点群c1および山と円または円弧D2との交点群c2が取得される。その後、交点群c1を用いて山が描画される。次に、交点群c2を用いて山が描画される。次に、これら2つの山が合成されて表示される。
【0070】
なお、この実施の形態7では、円または円弧D1および円または円弧D2を用いて山を描画する例について説明したが、円または円弧の数は2つに限らず、3つ以上とすることもできる。円または円弧の数を増加することによって、より実際の風景に近い山を描画することができる。
【0071】
次に、上述した動作を実現するために山描画プログラムによって行われる山描画処理の詳細を、図24に示すフローチャートを参照しながら説明する。なお、図18のフローチャートに示した実施の形態2に係るナビゲーションシステムにおける山描画処理と同一の処理を行うステップには同一の符号を付し、説明を簡略化する。
【0072】
山描画処理では、まず、自車の現在位置が入力される(ステップST20)。次いで、自車の現在位置を中心とする所定の半径の円または円弧が求められる(ステップST50)。具体的には、CPU31は、ステップST20で決定された基準点を中心とし、半径が所定の距離にある円または円弧D1を求める。次いで、カウンタのカウント値iがゼロに初期化される(ステップST40)。次いで、カウント値iが設定された値を超えたかどうかが調べられる(ステップST41)。
【0073】
次いで、1つの標高リストの取得が試みられ(ステップST24)、標高リストを取得できたかどうかが調べられる(ステップST25)。ここで、標高リストを取得できたことが判断されると、次いで、標高リストから隣り合う2点の取得が試みられ(ステップST26)、2点を取得できたかどうかが調べられる(ステップST27)。ここで、2点を取得できたことが判断されると、これら2点を結ぶ直線の方程式が求められる(ステップST28)。
【0074】
次いで、ステップST28で求められた2点を結ぶ直線と円または円弧とが交わるかどうかが調べられ(ステップST51)、交わることが判断されると、2点を結ぶ直線と円または円弧との交点が求められてメモリ32に保存される(ステップST30)。その後、シーケンスはステップST26に戻り、以下同様の処理が繰り返される。上記ステップST29において2点を結ぶ直線と円または円弧とが交わらないことが判断された場合もシーケンスはステップST26に戻る。
【0075】
これらステップST26〜ST30の繰り返し実行の途中で、ステップST27において、標高リストを取得できないことが判断されると、1つの等高線に対する処理は終了したものと認識され、シーケンスはステップST24に戻り、以下、上述した処理が繰り返される。そして、ステップST24〜ST30の繰り返し実行の途中で、ステップST25において、標高リストを取得できないことが判断されると、全ての標高リストに対する処理は完了したものと認識され、シーケンスはステップST52に進む。この時点で、半直線Aに直交する1つの線分と全ての等高線との交点の3次元座標(x、y、h)が、メモリ32に格納される。
【0076】
ステップST52では、交点が存在するかどうかが調べられる。ここで、交点が存在することが判断されると、交点の並び替えが行われる(ステップST31)。そして、並び替えられた交点がメモリ32に保存される(ステップST32)。次いで、円または円弧の半径が所定距離だけ伸ばされる(ステップST53)。すなわち、CPU31は、円または円弧を一定距離だけ移動させた円または円弧(図16の円または円弧D2)を算出する。上記ステップST52において、交点が存在しないことが判断されると、ステップST31〜ST53の処理はスキップされる。次いで、カウント値iがインクリメント(+1)される(ステップST43)。その後、シーケンスはステップST41に戻り、上述した処理が繰り返される。
【0077】
これらステップST41〜ST43の繰り返し実行の途中で、ステップST41において、カウント値iが設定された値を超えたことが判断されると、あらかじめ設定された、全ての円または円弧に対する処理が完了したものと認識され、処理は終了する。以上の処理により、複数の円または円弧と山を表す等高線との交点群が取得される。その後、半直線Aに直交する複数の線分の各々について、交点群を結ぶことによって複数の山が描画され、これらが合成されて表示される。この合成の際には、遠くの山と近くの山が重複する部分については、遠くの山の一部が近くの山に隠れるように表示される。
【0078】
以上説明したように、この発明の実施の形態7に係るナビゲーションシステムによれば、自車の現在位置を中心とする複数の円または円弧と等高線との交点を求め、この求めた交点に基づき山を描画するように構成したので、自車が移動することによる山の形状の変化を抑えて、より実際の背景に近い形状を有する山を描画することができる。
【0079】
なお、この実施の形態2に係るナビゲーションシステムにおいては、円または円弧の各々について描画される山の色を異なるように構成できる。例えば、近くの山は濃い色で描画し、遠くの山は薄い色で描画するように構成できる。この構成によれば、乗員視点地図に描画される山に遠近感を持たせることができるので、さらに実際の背景に近い山を描画することができる。
【0080】
また、実施の形態5に係るナビゲーションシステムと同様に、等高線との交点を求めるための円または円弧として、山の頂上を通る円または円弧を用いることができる。この場合は、実施の形態5に係るナビゲーションシステムと同様の作用および効果を奏する。
【0081】
実施の形態8.
この発明の実施の形態8に係るナビゲーションシステムは、実施の形態7に係るナビゲーションシステムにおいて、円または円弧の間隔を、自車の現在位置から所定の距離以内では小さくし、所定の距離以上では大きくするようにしたものである。この実施の形態8に係るナビゲーションシステムの機能的な構成およびハードウェア構成は、図1および図2に示した実施の形態1に係るナビゲーションシステムのそれらと同じである。
【0082】
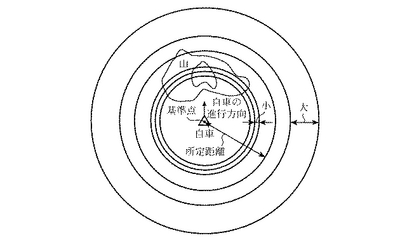
この発明の実施の形態8に係るナビゲーションシステムの動作を説明する。図25は、このナビゲーションシステムの山描画処理を説明するための図であり、自車の現在位置を基準点とし、自車の進行方向に山が存在する状態を示している。このナビゲーションシステムでは、自車の現在位置(基準点)を中心として半径が所定距離以内では狭い間隔の複数の円または円弧が求められ、自車の現在位置から所定の距離以上では広い間隔の複数の円または円弧が求められる。そして、これら複数の円または円弧と等高線との交点群が取得される。
【0083】
その後、複数の円または円弧の各々について、交点群を結ぶことによって複数の山が描画され、これらが合成されて表示される。この合成の際には、遠くの山と近くの山が重複する部分については、遠くの山の一部が近くの山に隠れるように表示される。
【0084】
以上説明したように、この発明の実施の形態8に係るナビゲーションシステムによれば、自車の現在位置から所定の距離以内では、複数の円または円弧の間隔を狭くし、所定の距離以上では、円または円弧の間隔を広くするように構成したので、近くの山は詳細に描画されるが、遠くの山は粗に描画される。従って、遠くの山を描画するための処理時間を短縮することができ、全体としてナビゲーションシステムの処理速度を向上させることができる。
【0085】
実施の形態9.
この発明の実施の形態9に係るナビゲーションシステムは、実施の形態7に係るナビゲーションシステムにおいて、複数の円または円弧の間隔を、自車の現在位置から遠くになるに従って広くするようにしたものである。この実施の形態9に係るナビゲーションシステムの機能的な構成およびハードウェア構成は、図1および図2に示した実施の形態1に係るナビゲーションシステムのそれらと同じである。
【0086】
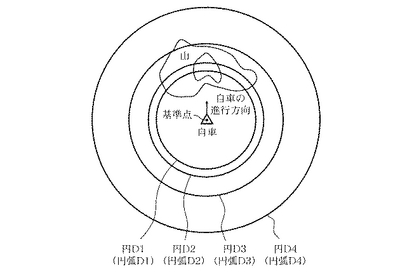
この発明の実施の形態4に係るナビゲーションシステムの動作を説明する。図26は、このナビゲーションシステムの山描画処理を説明するための図であり、自車の現在位置を基準点とし、自車の進行方向に山が存在する状態を示している。このナビゲーションシステムでは、自車の現在位置(基準点)を中心とする円または円弧として、自車の現在位置から離れるに連れて等比間隔で広がる複数の円または円弧D1、D2、D3およびD4が求められる。基準点から各円または円弧D1、D2、D3およびD4までの距離は、下記した式(2)に従って求めることができる。
円D1の半径×rn-1・・・(2)
ここで、rは所定の公比、nは自車の現在位置から順番に付された円または円弧の番号である。
【0087】
次いで、上記のようにして求められた複数の円または円弧と等高線との交点群が取得される。その後、複数の円または円弧の各々について、交点群を結ぶことによって複数の山が描画され、これらが合成されて表示される。この合成の際には、遠くの山と近くの山が重複する部分については、遠くの山の一部が近くの山に隠れるように表示される。
【0088】
以上説明したように、この発明の実施の形態9に係るナビゲーションシステムによれば、自車の現在位置から離れるに連れて等比間隔で広がる複数の円または円弧に基づいて山を描画するように構成したので、近くの山は詳細に描画されるが、遠くの山になるに連れて粗に描画される。従って、遠くの山を描画するための処理時間を短縮することができ、全体としてナビゲーションシステムの処理速度を向上させることができる。
【図面の簡単な説明】
【0089】
【図1】この発明の実施の形態1に係るナビゲーションシステムの機能的な構成を示すブロック図である。
【図2】この発明の実施の形態1に係るナビゲーションシステムの詳細なハードウェア構成を示すブロック図である。
【図3】この発明の実施の形態1に係るナビゲーションシステムで使用される標高データの格納形式を示す図である。
【図4】この発明の実施の形態1に係るナビゲーションシステムの概略の動作を示すフローチャートである。
【図5】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理を説明するための図である。
【図6】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理で行われる等高線と線分との交点を求める方法を説明するための図である。
【図7】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理において求められる交点を示す図である。
【図8】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理で求められた交点データがメモリに格納される様子を示す図である。
【図9】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理において山を描画する順序を説明するための図である。
【図10】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理において行われる交点の並び替えを説明するための図である。
【図11】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理において交点の並び替後の交点データがメモリに格納される様子を示す図である。
【図12】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理において行われる山の端点の高度を補正する処理を説明するための図である。
【図13】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理において描画される山を自車の進行方向の横から見た図である。
【図14】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理において画面に表示される山を示す図である。
【図15】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理の詳細を示すフローチャートである。
【図16】この発明の実施の形態2に係るナビゲーションシステムで実行される山描画処理を説明するための図である。
【図17】この発明の実施の形態2に係るナビゲーションシステムで実行される山描画処理において山を描画する順序を説明するための図である。
【図18】この発明の実施の形態2に係るナビゲーションシステムで実行される山描画処理の詳細を示すフローチャートである。
【図19】この発明の実施の形態3に係るナビゲーションシステムで実行される山描画処理を説明するための図である。
【図20】この発明の実施の形態4に係るナビゲーションシステムで実行される山描画処理を説明するための図である。
【図21】この発明の実施の形態5に係るナビゲーションシステムで実行される山描画処理を説明するための図である。
【図22】この発明の実施の形態6に係るナビゲーションシステムで実行される山描画処理を説明するための図である。
【図23】この発明の実施の形態7に係るナビゲーションシステムで実行される山描画処理を説明するための図である。
【図24】この発明の実施の形態7に係るナビゲーションシステムで実行される山描画処理の詳細を示すフローチャートである。
【図25】この発明の実施の形態8に係るナビゲーションシステムで実行される山描画処理を説明するための図である。
【図26】この発明の実施の形態9に係るナビゲーションシステムで実行される山描画処理を説明するための図である。
【符号の説明】
【0090】
1 入力装置、2 記憶装置、3 制御装置、4 表示装置、11 GPSセンサ、12 ジャイロセンサ、13 車速センサ、21 外部記憶装置、22 カーナビゲーションプログラム、23 山描画プログラム、24 地図データ、25 オペレーティングシステム(OS)、31 CPU、32 メモリ、33 表示制御装置、41 表示デバイス。
【技術分野】
【0001】
この発明は、自己の現在位置、案内経路、渋滞予測情報等を地図とともに表示するナビゲーションシステムに関し、特に車両の乗員の視点で自車の進行方向の景観を表示する技術に関する。
【背景技術】
【0002】
従来、ナビゲーションシステムの1つとして、運転手が目的地に容易に到着できるように支援を行うカーナビゲーション装置が知られている。このカーナビゲーション装置は、CD(Compact Disc)、DVD(Digital Versatile Disk)といった記憶媒体やHDD(Hard Disk Drive)装置に格納された2次元座標の地図データを取得し、この取得した地図データに基づいて表示装置の画面上に道路、建物、空等を含む地図を表示するとともに、GPS(Global Positioning System)やジャイロを用いて自車の現在位置や自車が向いている方向を検出して地図上に表示し、さらに、VICS(Vehicle information and Communication System)情報等を用いて渋滞予測情報を地図上に表示する。
【0003】
カーナビゲーション装置で表示される地図の種類としては、2D地図、鳥瞰図、乗員視点地図などが知られている。2D地図は、上空から地面を垂直に見下ろしたように描かれた2次元の地図である。鳥瞰図は、恰も上空の鳥が見ているように、運転手の斜め手前上空から自車の進行方向の地面を見下ろしたように描かれた3次元の地図である。さらに、乗員視点地図は、運転手または助手席の乗員の視点で進行方向を見たように描かれた3次元の地図である。乗員視点地図は、運転手の視点で見た実際の景色に近い景色が表示されるので、地図と実際の道路との対応が直感的に理解できるという特徴を有する。
【0004】
なお、3次元の地図を表示する技術として、特許文献1は、山並み表示を行うことのできるナビゲーション装置における地図情報表示装置を開示している。この地図情報表示装置では、地図データとして、標高データを予め記憶させておき、鳥瞰図表示した際の所定の遠方領域に設けた擬似地平線上よりも、奧側の標高データを、地平面上の視点からの視線方向ごとに取得する。そして、それらのうち、最も大きな値の標高データを擬似地平線上のデータとして、鳥瞰図変換を行って、地図表示を行う。
【0005】
また、特許文献2は、地形・道路等の三次元の地図情報に基づいて立体的な地図を表示するナビゲーション装置において、走行道路に起伏が存在しても、自車の移動に伴って視点高度や視線を再設定することにより、スムーズに景観を更新するナビゲーション装置を開示している。このナビゲーション装置は、現在位置検出部により自車の現在位置が更新されると、自車付近の地図データを、データ読み込み部を介して地図データベースから読み込み、該地図データに含まれている自車周辺の地形高度データを参照し、視点設定部により地形高度よりも高い位置に視点を再設定した後、表示処理部により座標変換を行って、設定した視点から眺めた透視地図を表示する。
【0006】
また、地図データに基づき地形を解析する技術として、特許文献3は、対象領域における情報分布を適正化して、地形解析などの精度を向上させることができる地形情報処理方法および装置を開示している。この地形情報の処理装置は、多種の地形情報を複数の縮尺で蓄積する大容量記憶手段から処理情報を入力する地形入力手段、入力された情報を記憶するメモリ、地形情報を表示情報に変換する地形表示手段、指定された解析処理をする地形解析手段、解析結果を表示情報に変換する解析結果表示手段及び処理内容の指示や結果の表示を行う入出力手段を備える。地形解析手段は解析領域での地形情報の分布を求め、情報量の少ない(多い)ところは他の縮尺の地形情報などにより適正化し、目的の解析を行う。これにより、地形情報処理の均質化、特に地形解析の精度を向上させることができ、ユーザの望む好適な情報を提供できる。また、この特許文献3には、ナビゲーションシステムとしては実現されていないが、地図データから等高線を取得し、ユーザが設定する任意の2点を結ぶ線分で等高線との交点を求め、線分が分断する地面の断面図を表示する技術も開示されている。
【0007】
【特許文献1】特開平10−307034号公報
【特許文献2】特開平10−143066号公報
【特許文献3】特許第2644935号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところで、運転手は、自車の現在位置や方角を認識する場合、周りの建物の配置や特定施設(例えば東京タワー等)を見て確認する。従って、山岳地帯などといった周りに建物や特定施設が少ない場所では、自車の現在位置や方角を認識することができない。また、カーナビゲーション装置は、ハードウェアやソフトウェアの制限もあることから、情報量の多い地図データを備えることができず、また、描画モデルもデフォルメする必要がある。このため、3次元地図を画面に表示をした際には、実際の背景に近い絵にはなるものの、建物の位置や壁の模様といった詳細な部分が異なるため、運転手は、自車の現在位置、進行方向を認識することが容易ではない。
【0009】
このような問題を解消するために、背景に山を描画する方法が知られている。この方法は、運転手の視点での景観を表示する乗員視点地図では実現されていないが、運転手の視点より高い視点での景観を表示する鳥瞰図において実現されている。鳥瞰図では、上述した特許文献1に示されているように、地図上に存在する自車の現在位置から一定距離だけ離れた地形メッシュの標高を取得し、背景として描画している。この方法だと、山の起伏を詳細に表現できず、実際の山と大きく異なるので、現在地の確認が容易にできない。
【0010】
この発明は、上述した問題を解消するためになされたものであり、その目的は、運転手が自車の現在位置や進行方向を容易に理解することのできるナビゲーションシステムを提供することにある。
【課題を解決するための手段】
【0011】
この発明に係るナビゲーションシステムは、上記課題を達成するために、地図を表示する表示装置と、車両の乗員の視点で描画された進行方向の景観である乗員視点地図上に山を描画して表示装置に表示させる制御装置とを備えている。
【発明の効果】
【0012】
この発明によれば、車両の乗員の視点で描画された進行方向の景観である乗員視点地図上に山を描画して表示するように構成したので、運転手は、自車の現在位置や進行方向を容易に理解することができる。
【発明を実施するための最良の形態】
【0013】
以下、この発明の実施の形態を、図面を参照しながら詳細に説明する。
実施の形態1.
図1は、この発明の実施の形態1に係るナビゲーションシステムの機能的な構成を示すブロック図である。このナビゲーションシステムは、入力装置1、記憶装置2、制御装置3および表示装置4から構成されている。
【0014】
入力装置1は、自車の現在位置、走行速度、進行方向の方位などを制御装置3に入力する。記憶装置2は、地図データを格納する。地図データには、標高データ(等高線データ)、建物データ、道路データなどが含まれる。この記憶装置2に格納されている地図データは、制御装置3によって読み出される。
【0015】
制御装置3は、この発明の山描画データ作成手段に対応し、ナビゲーションシステムの全体を制御する。例えば、制御装置3は、入力装置1から自車の現在位置および進行方向の方位が入力されると、記憶装置2から自車の現在位置の周辺の地図データを読み出し、この読み出した地図データに含まれる標高データに基づき山を描画するための山描画データを生成して表示装置4に送る。表示装置4は、制御装置3から送られてくる山描画データに基づき背景に山を有する乗員視点地図を表示する。
【0016】
図2は、図1に示したナビゲーションシステムの詳細なハードウェア構成を示すブロック図である。なお、この実施の形態1に係るナビゲーションシステムでは、制御装置3をCPU(Central Processing Unit)を用いて構成しているが、CPUの代わりに、ハードウェアロジックで構成することもできる。
【0017】
このナビゲーションシステムは、バス10によって接続されたGPSセンサ11、ジャイロセンサ12、車速センサ13、外部記憶装置21、CPU31、メモリ32および表示制御装置33から構成されており、表示制御装置33には、表示デバイス41が接続されている。GPSセンサ11、ジャイロセンサ12および車速センサ13は、上述した入力装置1に対応し、外部記憶装置21は記憶装置2に対応する。また、CPU31、メモリ32および表示制御装置33は制御装置3に対応し、表示デバイス41は表示装置4に対応する。
【0018】
GPSセンサ11は、衛星軌道上に存在する複数のGPS衛星(図示しない)から送られてくる電波を受信することによって得られたGPS信号に基づいて所定の計算を行うことにより自車の現在位置を検出する。このGPSセンサ11で検出された現在位置(緯度、経度および高度)は、現在位置データとしてバス10を経由してCPU31に送られる。ジャイロセンサ12、自車が進行している方向の方位を検出する。このジャイロセンサ12で検出された進行方向の方位は、方位データとしてバス10を経由してCPU31に送られる。車速センサ13は、車両が所定距離だけ走行したことを検出するごとに車速パルスを発生し、車速データとして出力する。この車速センサ13から出力される車速データは、バス10を経由してCPU31に送られる。
【0019】
外部記憶装置21は、CD、DVDといった記憶媒体のドライブ装置またはHDD装置から構成されている。この外部記憶装置21には、カーナビゲーションプログラム22、山描画プログラム23、地図データ24およびオペレーティングシステム(OS)25が格納されている。なお、山描画プログラム23は、カーナビゲーションプログラム22の一部である。外部記憶装置21に記憶されている内容は、必要に応じてCPU31によって読み出される。
【0020】
CPU31は、GPSセンサ11、ジャイロセンサ12、車速センサ13、外部記憶装置21、メモリ32および表示制御装置33との間でバス10を経由してデータを送受することにより、このナビゲーションシステムの全体を制御する。メモリ32は、種々のデータを一時的に保持する。このメモリ32は、CPU31によってアクセスされる。表示制御装置33は、山を表示するための演算を行う専用演算器から構成されている。この表示制御装置33は、CPU31から送られてくる山描画データに基づいて山を表示するための表示データを生成し、表示デバイス41に送る。表示デバイス41は、例えば液晶ディスプレイ装置から構成されており、表示制御装置33から送られてくる表示データに従って、背景に山が含まれる乗員視点地図を表示する。
【0021】
次に、この実施の形態1に係るナビゲーションシステムで使用される地図データに含まれる標高データ(等高線データ)の外部記憶装置21への格納形式を説明する。図3は、外部記憶装置21に格納されている地図データに含まれる標高データの格納形式を示す図である。標高データは、標高ごとに用意された標高リストから構成されており、各標高リストは、標高を表す複数の点から構成されている。複数の点の各々は座標値(座標x、座標y、高度h)で定義されており、また、複数の点の各々に対してはアドレスが割り振られている。各標高リストに含まれる複数の点を順次結ぶことにより1つの高度に対する等高線が形成される。
【0022】
次に、上記のように構成される、この発明の実施の形態1に係るナビゲーションシステムの概略の動作を、山描画プログラム23によって実行される山描画処理を中心に、図4に示すフローチャートを参照しながら説明する。
【0023】
山描画処理では、まず、基準点および注視先方向が取得される(ステップST10)。具体的には、CPU31は、GPSセンサ11から取得した現在位置データ、ジャイロセンサ12から取得した方位データおよび車速センサ13から取得した車速データに基づき自車の現在位置を計算して基準点とするとともに、自車の進行方向の方位を計算して注視先方向の方位とする。図5は、自車の現在位置を基準点とし、自車の進行方向(注視先方向)に高度100mの等高線と高度200mの等高線を有する山が存在する状態を示している。なお、この実施の形態1では、基準点として自車の現在位置を用いているが、基準点としては自車の現在位置に限らず、ユーザが任意の位置を設定するように構成することもできる。例えば、基準点として、自車から後方に所定距離だけ離れた位置を設定するように構成できる。
【0024】
次いで、線分Bが求められる(ステップST11)。すなわち、図5に示すように、自車の現在位置(基準点)を始点として進行方向へ延びる半直線Aに直交し、自車の現在位置から所定の距離だけ離れた位置に存在する線分Bが求められる。なお、線分Bは半直線Aに対して厳密に直交する必要はなく、直交に近い角度で交差するように構成することもできる。この発明で言う交差には、直交および直交に近い角度で交差する場合を含む。
【0025】
次いで、線分Bと等高線との交点が求められる(ステップST12)。図6は、線分Bと等高線との交点を求める方法を説明するための図である。交点は、以下のようにして算出される。まず、地図データに含まれる標高データから隣り合う2点(例えば、点1と点2)のxy座標が取得され、これら2点を結ぶ直線と線分Bとの交点の有無が調べられる。そして、交点が存在する場合は、その交点の3次元座標(x、y、h)の値が交点データとしてメモリ32に格納される。次いで、標高データから次の隣り合う2点(例えば、点2と点3)のxy座標が取得され、これら2点を結ぶ直線と線分Bとの交点の有無が調べられる。そして、交点が存在する場合は、その交点の3次元座標(x、y、h)が交点データとしてメモリ32に格納される。以下同様にして、1つの等高線に対する全ての隣り合う2点間について線分Bとの交点の有無が調べられて交点が求められる。1つの等高線に対する交点の算出が完了すると、次の等高線に対する交点が算出される。
【0026】
ステップST12の処理により、例えば図7に示すような、高度100mの等高線と高度200mの等高線を有する地図であれば、高度100mの等高線と線分Bとの交点として交点1および交点2が求められ、高度200mの等高線と線分Bとの交点として交点3および交点4が求められる。この場合、各等高線ごとに交点が計算されるので、メモリ32には、図8に示すように、交点1〜交点4の3次元座標(x、y、h)が、交点1→交点2→交点3→交点4の順番で格納される。
【0027】
次いで、ステップST12で求められた交点を用いて2次元の山が計算される(ステップST13)。すなわち、メモリ32に格納された複数の交点データのz軸の値(標高=h)をz座標上で結ぶことにより、厚みのない2次元の山を表す山描画データが生成される。この際、メモリ32に格納されている交点データが先頭から2つずつ順番に取得されて山の形状が描画される。
【0028】
今、図8に示すような交点データがメモリ32に格納されているものとすると、まず、交点1と交点2の座標値をメモリ32から取得して山が描画される。これにより、図9(a)に示すような山の形状が得られる。次に、交点2と交点3の座標値をメモリ32から取得して山が描画される。これにより、図9(b)に示すような山の形状が得られる。次に、交点3と交点4の座標値をメモリから取得して山が描画される。これにより、図9(c)に示すような山の形状が得られ、これが最終的に描画される山の形状になる。従って、実際の山とはかけ離れた形状の山が描画されることになる。
【0029】
このような事態を回避するために、この実施の形態1では、等高線ごとにメモリ32に格納されている交点データが、x座標またはy座標の値に従って並び替えられる。この処理では、図10に示すように、東方向(方位)と自車の進行方向(方位)とがなす角θによって並び替えが行われる。すなわち、角θが0゜<θ<180゜または180゜<θ<360゜の時はx座標の値の大きい順または小さい順に並び替えが行われる。角θが0゜または180゜の時は、x座標の値がすべての点で同じであるので、y座標の値の大きい順または小さい順に並び替えられる。この処理により、メモリ32に格納されている交点データは、図11に示すように、交点1→交点3→交点4→交点2の順番に並び替えられる。
【0030】
次に、山の端点になる交点の高度が地表に近い高度に補正される。図12(a)に示すように、山の端点も高度を持っているので、その高度を用いて山を描画すると、図12(b)に示すように山の端がすべて崖として表示される。そこで、山の端点となる交点、すなわちメモリ32の最初に格納された交点と最後に格納された交点の高度を地表に近い所定の高度に置き換える処理が行われる。これにより、図12(c)に示すように、山の端をなだらかに描画することが可能となる。
【0031】
なお、山の端点となる交点の高度の補正は、山の端点の高度から自車の現在位置の高度を差し引くことによって行うこともできる。例えば、自車の現在位置の高度が80mであれば、図12(a)における点1の高度100mから80mを差し引いて、山の端点である点1の高度を20mに補正することができる。この場合、自車の現在位置の高度は、地図データまたはGPSセンサ11からのGPSデータに基づいて算出することができる。このように、山の端点の高度を補正することにより、描画される山の形状を、運転手が実際に見る形状に近づけることが可能になり、より自然な形状の山を描画することができる。
【0032】
次いで、乗員の視点で描画する処理が実行される(ステップST14)。すなわち、メモリ32に格納されている交点データを表示制御装置33にて描画用に加工し、表示デバイス41に表示させることにより、乗員の視点で山を表示することが可能になる。上述した処理により得られる交点は等高線と線分Bとが交わる点であるので、描画される山は、図13に示すように、奥行きのない2次元の板状の山となる。2次元の板状の山とは厚みの無い平面状の山の断面図を指す。自車進行方向横から見ると図13に示すような山となる。これを乗員の視点で画面に描画すると図14に示すように表示される。
【0033】
次に、上述した動作を実現するために山描画プログラム23によって行われる山描画処理の詳細を、図15に示すフローチャートを参照しながら説明する。山描画処理では、まず、自車の現在位置が入力される(ステップST20)。すなわち、CPU31は、GPSセンサ11から現在位置データを取得する。この現在位置データによって指定される自車の現在位置が基準点として決定される。次いで、自車の進行方向の方位が入力される(ステップST21)。すなわち、CPU31は、ジャイロセンサ12から取得した方位データと車速センサ13から取得した車速データとに基づき自車の進行方向(注視先方向)の方位を決定する。
【0034】
次いで、半直線Aが求められる(ステップST22)。具体的には、CPU31は、ステップST20で決定された基準点とステップST21で決定された自車の進行方向(注視先方向)の方位とに基づき、自車の現在位置を始点とし、自車の進行方向の方位へ伸びる半直線Aを求める。次いで線分Bが求められる(ステップST23)。すなわち、CPU31は、半直線Aと直交し、自車から所定の距離だけ離れた線分Bを求める。
【0035】
次いで、1つの標高リストの取得が試みられる(ステップST24)。具体的には、CPU31は、外部記憶装置21の地図データ24に含まれる標高データから、1つの標高リストの取得を試みる。次いで、標高リストを取得できたかどうかが調べられる(ステップST25)。ここで、標高リストを取得できたことが判断されると、次いで、標高リストから隣り合う2点の取得が試みられる(ステップST26)。次いで、2点を取得できたかどうかが調べられる(ステップST27)。ここで、2点を取得できたことが判断されると、これら2点を結ぶ直線の方程式が求められる(ステップST28)。
【0036】
次いで、ステップST28で求められた2点を結ぶ直線と線分Bとが交わるかどうかが調べられる(ステップST29)。ここで、交わることが判断されると、2点を結ぶ直線と線分Bとの交点が求められ、メモリ32に保存される(ステップST30)。その後、シーケンスはステップST26に戻り、以下同様の処理が繰り返される。上記ステップST29において2点を結ぶ直線と線分Bとが交わらないことが判断された場合もシーケンスはステップST26に戻る。
【0037】
これらステップST26〜ST30の繰り返し実行の途中で、ステップST27において、標高リストを取得できないことが判断されると、1つの等高線に対する処理は終了したものと認識され、シーケンスはステップST24に戻り、以下、上述した処理が繰り返される。そして、ステップST24〜ST30の繰り返し実行の途中で、ステップST25において、標高リストを取得できないことが判断されると、全ての標高リストに対する処理は完了したものと認識され、シーケンスはステップST31に進む。この時点で、例えば図8に示すように、全ての等高線に対する交点1〜交点4の3次元座標(x、y、h)が、メモリ32に、交点1→交点2→交点3→交点4の順番で格納される。
【0038】
ステップST31では、交点の並び替えが行われる。すなわち、CPU31は、メモリ32に格納されている交点データを、そのx座標またはy座標の値に従って並び替える(詳細は上述した通りである)。次いで、並び替えられた交点がメモリ32に保存される(ステップST32)。これにより、例えば図11に示すように、交点1→交点3→交点4→交点2の順番に並び替えられた交点データがメモリ32に得られる。このメモリ32に得られた交点データに基づき描画が行われることにより、背景に山を含む乗員視点地図が表示デバイス41に表示される。
【0039】
以上説明したように、この発明の実施の形態1に係るナビゲーションシステムによれば、自車の現在位置を始点として進行方向へ延びる半直線Aと直交する線分Bと等高線との交点を取得してメモリ32に格納し、このメモリ32に格納された最初の交点データと最後の交点データの高度を地表近くになるように補正し、それらの交点を用いて山を描画することにより、実際の背景に近い山を表示することができる。
【0040】
実施の形態2.
この発明の実施の形態2に係るナビゲーションシステムは、自車の現在位置から所定の距離に存在する山のみならず、さらに他の距離に存在する山をも表示するようにしたものである。この実施の形態2に係るナビゲーションシステムの機能的な構成およびハードウェア構成は、図1および図2に示した実施の形態1に係るナビゲーションシステムのそれらと同じである。
【0041】
この発明の実施の形態2に係るナビゲーションシステムの動作を説明する。図16は、実施の形態2に係るナビゲーションシステムの山描画処理を説明するための図であり、自車の現在位置を基準点とし、自車の進行方向(注視先方向)に山m1と山m2が存在する状態を示している。実施の形態2に係るナビゲーションシステムの概略の動作は以下の通りである。すなわち、自車の現在位置(基準点)を始点として進行方向へ延びる半直線Aに直交し、自車の現在位置から第1の距離だけ離れた位置に存在する線分Bおよび第2の距離だけ離れた位置に存在する線分B’が求められる。そして、山m1と線分Bとの交点群c1および山m2と線分B’との交点群c2が取得される。
【0042】
その後、図17(a)に示すように、交点群c1を用いて山m1が描画される。次に、図17(b)に示すように、交点群c2を用いて山m2が描画される。次に、図17(c)に示すように、これら山m1および山m2が合成されて表示される。この場合、交点群c2は交点群c1より自車の現在位置から遠い位置に存在するので、交点群c2により形成される山m2は、交点群c1により形成される山m1の後方に存在するように表示される。すなわち、山m1と山m2とが重複する部分については、山m2の一部が山m1に隠れるように表示される。
【0043】
なお、図16および図17に示した例では、半直線Aに直交する2つの線分Bおよび線分B’を用いて山を描画する例について説明したが、半直線Aに直交する線分は2つに限らず、3つ以上の数とすることもできる。半直線Aに直交する線分の数を増加することによって、より実際の風景に近い山を描画することができる。
【0044】
次に、上述した動作を実現するために山描画プログラムによって行われる山描画処理の詳細を、図18に示すフローチャートを参照しながら説明する。なお、図15のフローチャートに示した実施の形態1に係るナビゲーションシステムにおける山描画処理と同一の処理を行うステップには同一の符号を付し、説明を簡略化する。
【0045】
山描画処理では、まず、自車の現在位置が入力される(ステップST20)。次いで、自車の進行方向の方位が入力される(ステップST21)。次いで、半直線Aが求められる(ステップST22)。次いで、カウンタのカウント値iがゼロに初期化される(ステップST40)。このカウンタは、CPU31の内部に設けられるものであり、半直線Aに直交する線分の数を計数するために使用される。次いで、カウント値iが設定された値を超えたかどうかが調べられる(ステップST41)。ここで、設定された値は、半直線Aに直交する線分の数を表し、ユーザがあらかじめ設定できるようになっている。
【0046】
次いで線分Bが求められる(ステップST23)。次いで、1つの標高リストの取得が試みられ(ステップST24)、標高リストを取得できたかどうかが調べられる(ステップST25)。ここで、標高リストを取得できたことが判断されると、次いで、標高リストから隣り合う2点の取得が試みられ(ステップST26)、2点を取得できたかどうかが調べられる(ステップST27)。ここで、2点を取得できたことが判断されると、これら2点を結ぶ直線の方程式が求められる(ステップST28)。
【0047】
次いで、ステップST28で求められた2点を結ぶ直線と線分Bとが交わるかどうかが調べられ(ステップST29)、交わることが判断されると、2点を結ぶ直線と線分Bとの交点が求められてメモリ32に保存される(ステップST30)。その後、シーケンスはステップST26に戻り、以下同様の処理が繰り返される。上記ステップST29において2点を結ぶ直線と線分Bとが交わらないことが判断された場合もシーケンスはステップST26に戻る。
【0048】
これらステップST26〜ST30の繰り返し実行の途中で、ステップST27において、標高リストを取得できないことが判断されると、1つの等高線に対する処理は終了したものと認識され、シーケンスはステップST24に戻り、以下、上述した処理が繰り返される。そして、ステップST24〜ST30の繰り返し実行の途中で、ステップST25において、標高リストを取得できないことが判断されると、全ての標高リストに対する処理は完了したものと認識され、シーケンスはステップST31に進む。この時点で、半直線Aに直交する1つの線分と全ての等高線との交点の3次元座標(x、y、h)が、メモリ32に格納される。
【0049】
ステップST31では、交点の並び替えが行われる。そして、並び替えられた交点がメモリ32に保存される(ステップST32)。次いで、線分Bが一定距離だけ遠ざけられる(ステップST42)。すなわち、CPU31は、線分Bを一定距離だけ移動させた線分(図16の線分B’)を算出する。次いで、カウント値iがインクリメント(+1)される(ステップST43)。その後、シーケンスはステップST41に戻り、上述した処理が繰り返される。これらステップST41〜ST43の繰り返し実行の途中で、ステップST41において、カウント値iが設定された値を超えたことが判断されると、あらかじめ設定された、半直線Aに直交する全ての線分に対する処理が完了したものと認識され、処理は終了する。以上の処理により、半直線Aに直交する複数の線分と山を表す等高線との交点群が取得される。
【0050】
その後、半直線Aに直交する複数の線分の各々について、交点群を結ぶことによって複数の山が描画され、これらが合成されて表示される。この合成の際には、遠くの山と近くの山が重複する部分については、遠くの山の一部が近くの山に隠れるように合成される。従って、遠くの山が近くの山に隠れる部分については、遠くの山を描画するための計算を省略することが可能となり、省略した場合、処理の高速化が可能となる。
【0051】
以上説明したように、この発明の実施の形態2に係るナビゲーションシステムによれば、自車の現在位置を始点とし、進行方向へ向いた半直線Aに直交する複数の線分と等高線との交点を求め、この求めた交点に基づき山を描画するように構成したので、自車が移動することによる山の形状の変化を抑えて、より実際の背景に近い形状を有する山を描画することができる。
【0052】
なお、この実施の形態2に係るナビゲーションシステムにおいては、半直線Aに直交する複数の線分の各々について描画される山の色を異なるように構成できる。例えば、近くの山は濃い色で描画し、遠くの山は薄い色で描画するように構成できる。この構成によれば、乗員視点地図に描画される山に遠近感を持たせることができるので、さらに実際の背景に近い山を描画することができる。
【0053】
実施の形態3.
この発明の実施の形態3に係るナビゲーションシステムは、実施の形態2に係るナビゲーションシステムにおいて、半直線Aに直交する複数の線分の間隔を、自車の現在位置から所定の距離以内では狭くし、所定の距離以上では広くするようにしたものである。この実施の形態3に係るナビゲーションシステムの機能的な構成およびハードウェア構成は、図1および図2に示した実施の形態1に係るナビゲーションシステムのそれらと同じである。
【0054】
この発明の実施の形態3に係るナビゲーションシステムの動作を説明する。図19は、このナビゲーションシステムの山描画処理を説明するための図であり、自車の現在位置を基準点とし、自車の進行方向(注視先方向)に複数の山が存在する状態を示している。このナビゲーションシステムでは、自車の現在位置(基準点)を始点として進行方向へ延びる半直線Aに直交する線分として、自車の現在位置から所定の距離(図19では破線で示す)以内では狭い間隔の複数の線分B(1)、B(2)、・・・、B(m)が求められ、自車の現在位置から所定の距離以上では広い間隔の複数の線分B(n)が求められる。そして、これら複数の線分と等高線との交点群が取得される。
【0055】
その後、半直線Aに直交する複数の線分の各々について、交点群を結ぶことによって複数の山が描画され、これらが合成されて表示される。この合成の際には、遠くの山と近くの山が重複する部分については、遠くの山の一部が近くの山に隠れるように表示される。
【0056】
以上説明したように、この発明の実施の形態3に係るナビゲーションシステムによれば、自車の現在位置から所定の距離以内では、半直線Aに直交する複数の線分の間隔を狭くし、所定の距離以上では、半直線Aに直交する線分の間隔を広くするように構成したので、近くの山は詳細に描画されるが、遠くの山は粗に描画される。従って、遠くの山を描画するための処理時間を短縮することができ、全体としてナビゲーションシステムの処理速度を向上させることができる。
【0057】
実施の形態4.
この発明の実施の形態4に係るナビゲーションシステムは、実施の形態2に係るナビゲーションシステムにおいて、半直線Aに直交する複数の線分の間隔を、自車の現在位置から遠くになるに従って広くするようにしたものである。この実施の形態4に係るナビゲーションシステムの機能的な構成およびハードウェア構成は、図1および図2に示した実施の形態1に係るナビゲーションシステムのそれらと同じである。
【0058】
この発明の実施の形態4に係るナビゲーションシステムの動作を説明する。図20は、このナビゲーションシステムの山描画処理を説明するための図であり、自車の現在位置を基準点とし、自車の進行方向(注視先方向)に複数の山が存在する状態を示している。このナビゲーションシステムでは、自車の現在位置(基準点)を始点として進行方向へ延びる半直線Aに直交する線分として、自車の現在位置から離れるに連れて等比間隔で広がる複数の線分B(1)、B(2)、B(3)、・・・、B(n)が求められる。各線分B(1)、B(2)、B(3)、・・・、B(n)までの距離は、下記式(1)に従って求めることができる。
自車の現在位置から線分B(1)までの距離×rn-1・・・(1)
ここで、rは所定の公比、nは自車の現在位置から順番に付された線分Bの番号である。
【0059】
次いで、上記のようにして求められた複数の線分と等高線との交点群が取得される。その後、半直線Aに直交する複数の線分の各々について、交点群を結ぶことによって複数の山が描画され、これらが合成されて表示される。この合成の際には、遠くの山と近くの山が重複する部分については、遠くの山の一部が近くの山に隠れるように表示される。
【0060】
以上説明したように、この発明の実施の形態4に係るナビゲーションシステムによれば、自車の現在位置から離れるに連れて等比間隔で広がる複数の線分に基づいて山を描画するように構成したので、近くの山は詳細に描画されるが、遠くの山になるに連れて粗に描画される。従って、遠くの山を描画するための処理時間を短縮することができ、全体としてナビゲーションシステムの処理速度を向上させることができる。
【0061】
実施の形態5.
この発明の実施の形態5に係るナビゲーションシステムは、実施の形態2に係るナビゲーションシステムにおいて、半直線Aに直交する複数の線分として、山の頂上を通る線分を用いるようにしたものである。この実施の形態4に係るナビゲーションシステムの機能的な構成およびハードウェア構成は、図1および図2に示した実施の形態1に係るナビゲーションシステムのそれらと同じである。
【0062】
この発明の実施の形態5に係るナビゲーションシステムの動作を説明する。図21は、このナビゲーションシステムの山描画処理を説明するための図であり、自車の現在位置を基準点とし、自車の進行方向(注視先方向)に複数の山が存在する状態を示している。このナビゲーションシステムでは、自車の現在位置(基準点)を始点として進行方向へ延びる半直線Aに直交する線分として、自車の現在位置から近い順番に、山m1の山頂点を通る線分B(1)、山m2の山頂点を通る線分B(2)、・・・、山mnの山頂点を通る線分B(n)が求められる。
【0063】
次いで、上記のようにして求められた複数の線分と等高線との交点群が取得される。その後、半直線Aに直交する複数の線分の各々について、交点群および山頂点を結ぶことによって複数の山が描画され、これらが合成されて表示される。この合成の際には、遠くの山と近くの山が重複する部分については、遠くの山の一部が近くの山に隠れるように表示される。
【0064】
以上説明したように、この発明の実施の形態5に係るナビゲーションシステムによれば、自車の現在位置の進行方向に存在する山の山頂点を通る複数の線分に基づいて山頂が含まれる形状の山を描画するように構成したので、例えば図14に示すような山頂が存在しない平らな山ではなく、山頂を有する山が描画される。従って、より実際の背景に近い形状を有する山を描画することができる。また、「山頂を通る線分」と等高線との交点を求める事により、自車位置から山までの距離によらず、等高線との交点は同じ位置となるため、進行方向が同じであれば、常に同じ形状の山を描画することができる。
【0065】
実施の形態6.
この発明の実施の形態6に係るナビゲーションシステムは、実施の形態1に係るナビゲーションシステムにおいて、半直線Aに直交する直線の代わりに、自車の現在位置(基準点)を中心とする円または円弧を用いたものである。この実施の形態6に係るナビゲーションシステムの機能的な構成およびハードウェア構成は、図1および図2に示した実施の形態1に係るナビゲーションシステムのそれらと同じである。
【0066】
この発明の実施の形態6に係るナビゲーションシステムの概略の動作を、山描画プログラム23によって実行される山描画処理を中心に、図22に示す説明図を参照しながら説明する。山描画処理では、まず、実施の形態1の場合と同様の方法で、基準点が取得される。次いで、円または円弧が求められる。すなわち、図22に示すように、自車の現在位置(基準点)を中心として所定の距離を半径とする円または円弧が求められる。なお、円または円弧は厳密な円または円弧である必要はなく、例えば楕円または楕円弧であってもよい。この発明で言う曲線には、円および円弧の他に、楕円または楕円弧を含む。次いで、円または円弧と等高線との交点が求められ、この求められた交点に基づいて山が描画される。以下の処理は、実施の形態1の場合と同じである。
【0067】
以上説明したように、この発明の実施の形態6に係るナビゲーションシステムによれば、乗員から等距離にある山が平面に展開されて描画されるので、より実際の背景に近い山を描画することができる。
【0068】
実施の形態7.
この発明の実施の形態7に係るナビゲーションシステムは、自車の現在位置から所定の距離の半径位置に存在する山のみならず、さらに他の距離の半径位置に存在する山をも表示するようにしたものである。この実施の形態7に係るナビゲーションシステムの機能的な構成およびハードウェア構成は、図1および図2に示した実施の形態1に係るナビゲーションシステムのそれらと同じである。
【0069】
次に、この発明の実施の形態7に係るナビゲーションシステムの動作を説明する。図23は、このナビゲーションシステムの山描画処理を説明するための図であり、自車の現在位置を基準点とし、自車の進行方向に山が存在する状態を示している。このナビゲーションシステムでは、自車の現在位置(基準点)を中心として半径方向へ第1の距離だけ離れた位置に存在する円または円弧D1および第2の距離だけ離れた位置に存在する円または円弧D2が求められる。そして、山と円または円弧D1との交点群c1および山と円または円弧D2との交点群c2が取得される。その後、交点群c1を用いて山が描画される。次に、交点群c2を用いて山が描画される。次に、これら2つの山が合成されて表示される。
【0070】
なお、この実施の形態7では、円または円弧D1および円または円弧D2を用いて山を描画する例について説明したが、円または円弧の数は2つに限らず、3つ以上とすることもできる。円または円弧の数を増加することによって、より実際の風景に近い山を描画することができる。
【0071】
次に、上述した動作を実現するために山描画プログラムによって行われる山描画処理の詳細を、図24に示すフローチャートを参照しながら説明する。なお、図18のフローチャートに示した実施の形態2に係るナビゲーションシステムにおける山描画処理と同一の処理を行うステップには同一の符号を付し、説明を簡略化する。
【0072】
山描画処理では、まず、自車の現在位置が入力される(ステップST20)。次いで、自車の現在位置を中心とする所定の半径の円または円弧が求められる(ステップST50)。具体的には、CPU31は、ステップST20で決定された基準点を中心とし、半径が所定の距離にある円または円弧D1を求める。次いで、カウンタのカウント値iがゼロに初期化される(ステップST40)。次いで、カウント値iが設定された値を超えたかどうかが調べられる(ステップST41)。
【0073】
次いで、1つの標高リストの取得が試みられ(ステップST24)、標高リストを取得できたかどうかが調べられる(ステップST25)。ここで、標高リストを取得できたことが判断されると、次いで、標高リストから隣り合う2点の取得が試みられ(ステップST26)、2点を取得できたかどうかが調べられる(ステップST27)。ここで、2点を取得できたことが判断されると、これら2点を結ぶ直線の方程式が求められる(ステップST28)。
【0074】
次いで、ステップST28で求められた2点を結ぶ直線と円または円弧とが交わるかどうかが調べられ(ステップST51)、交わることが判断されると、2点を結ぶ直線と円または円弧との交点が求められてメモリ32に保存される(ステップST30)。その後、シーケンスはステップST26に戻り、以下同様の処理が繰り返される。上記ステップST29において2点を結ぶ直線と円または円弧とが交わらないことが判断された場合もシーケンスはステップST26に戻る。
【0075】
これらステップST26〜ST30の繰り返し実行の途中で、ステップST27において、標高リストを取得できないことが判断されると、1つの等高線に対する処理は終了したものと認識され、シーケンスはステップST24に戻り、以下、上述した処理が繰り返される。そして、ステップST24〜ST30の繰り返し実行の途中で、ステップST25において、標高リストを取得できないことが判断されると、全ての標高リストに対する処理は完了したものと認識され、シーケンスはステップST52に進む。この時点で、半直線Aに直交する1つの線分と全ての等高線との交点の3次元座標(x、y、h)が、メモリ32に格納される。
【0076】
ステップST52では、交点が存在するかどうかが調べられる。ここで、交点が存在することが判断されると、交点の並び替えが行われる(ステップST31)。そして、並び替えられた交点がメモリ32に保存される(ステップST32)。次いで、円または円弧の半径が所定距離だけ伸ばされる(ステップST53)。すなわち、CPU31は、円または円弧を一定距離だけ移動させた円または円弧(図16の円または円弧D2)を算出する。上記ステップST52において、交点が存在しないことが判断されると、ステップST31〜ST53の処理はスキップされる。次いで、カウント値iがインクリメント(+1)される(ステップST43)。その後、シーケンスはステップST41に戻り、上述した処理が繰り返される。
【0077】
これらステップST41〜ST43の繰り返し実行の途中で、ステップST41において、カウント値iが設定された値を超えたことが判断されると、あらかじめ設定された、全ての円または円弧に対する処理が完了したものと認識され、処理は終了する。以上の処理により、複数の円または円弧と山を表す等高線との交点群が取得される。その後、半直線Aに直交する複数の線分の各々について、交点群を結ぶことによって複数の山が描画され、これらが合成されて表示される。この合成の際には、遠くの山と近くの山が重複する部分については、遠くの山の一部が近くの山に隠れるように表示される。
【0078】
以上説明したように、この発明の実施の形態7に係るナビゲーションシステムによれば、自車の現在位置を中心とする複数の円または円弧と等高線との交点を求め、この求めた交点に基づき山を描画するように構成したので、自車が移動することによる山の形状の変化を抑えて、より実際の背景に近い形状を有する山を描画することができる。
【0079】
なお、この実施の形態2に係るナビゲーションシステムにおいては、円または円弧の各々について描画される山の色を異なるように構成できる。例えば、近くの山は濃い色で描画し、遠くの山は薄い色で描画するように構成できる。この構成によれば、乗員視点地図に描画される山に遠近感を持たせることができるので、さらに実際の背景に近い山を描画することができる。
【0080】
また、実施の形態5に係るナビゲーションシステムと同様に、等高線との交点を求めるための円または円弧として、山の頂上を通る円または円弧を用いることができる。この場合は、実施の形態5に係るナビゲーションシステムと同様の作用および効果を奏する。
【0081】
実施の形態8.
この発明の実施の形態8に係るナビゲーションシステムは、実施の形態7に係るナビゲーションシステムにおいて、円または円弧の間隔を、自車の現在位置から所定の距離以内では小さくし、所定の距離以上では大きくするようにしたものである。この実施の形態8に係るナビゲーションシステムの機能的な構成およびハードウェア構成は、図1および図2に示した実施の形態1に係るナビゲーションシステムのそれらと同じである。
【0082】
この発明の実施の形態8に係るナビゲーションシステムの動作を説明する。図25は、このナビゲーションシステムの山描画処理を説明するための図であり、自車の現在位置を基準点とし、自車の進行方向に山が存在する状態を示している。このナビゲーションシステムでは、自車の現在位置(基準点)を中心として半径が所定距離以内では狭い間隔の複数の円または円弧が求められ、自車の現在位置から所定の距離以上では広い間隔の複数の円または円弧が求められる。そして、これら複数の円または円弧と等高線との交点群が取得される。
【0083】
その後、複数の円または円弧の各々について、交点群を結ぶことによって複数の山が描画され、これらが合成されて表示される。この合成の際には、遠くの山と近くの山が重複する部分については、遠くの山の一部が近くの山に隠れるように表示される。
【0084】
以上説明したように、この発明の実施の形態8に係るナビゲーションシステムによれば、自車の現在位置から所定の距離以内では、複数の円または円弧の間隔を狭くし、所定の距離以上では、円または円弧の間隔を広くするように構成したので、近くの山は詳細に描画されるが、遠くの山は粗に描画される。従って、遠くの山を描画するための処理時間を短縮することができ、全体としてナビゲーションシステムの処理速度を向上させることができる。
【0085】
実施の形態9.
この発明の実施の形態9に係るナビゲーションシステムは、実施の形態7に係るナビゲーションシステムにおいて、複数の円または円弧の間隔を、自車の現在位置から遠くになるに従って広くするようにしたものである。この実施の形態9に係るナビゲーションシステムの機能的な構成およびハードウェア構成は、図1および図2に示した実施の形態1に係るナビゲーションシステムのそれらと同じである。
【0086】
この発明の実施の形態4に係るナビゲーションシステムの動作を説明する。図26は、このナビゲーションシステムの山描画処理を説明するための図であり、自車の現在位置を基準点とし、自車の進行方向に山が存在する状態を示している。このナビゲーションシステムでは、自車の現在位置(基準点)を中心とする円または円弧として、自車の現在位置から離れるに連れて等比間隔で広がる複数の円または円弧D1、D2、D3およびD4が求められる。基準点から各円または円弧D1、D2、D3およびD4までの距離は、下記した式(2)に従って求めることができる。
円D1の半径×rn-1・・・(2)
ここで、rは所定の公比、nは自車の現在位置から順番に付された円または円弧の番号である。
【0087】
次いで、上記のようにして求められた複数の円または円弧と等高線との交点群が取得される。その後、複数の円または円弧の各々について、交点群を結ぶことによって複数の山が描画され、これらが合成されて表示される。この合成の際には、遠くの山と近くの山が重複する部分については、遠くの山の一部が近くの山に隠れるように表示される。
【0088】
以上説明したように、この発明の実施の形態9に係るナビゲーションシステムによれば、自車の現在位置から離れるに連れて等比間隔で広がる複数の円または円弧に基づいて山を描画するように構成したので、近くの山は詳細に描画されるが、遠くの山になるに連れて粗に描画される。従って、遠くの山を描画するための処理時間を短縮することができ、全体としてナビゲーションシステムの処理速度を向上させることができる。
【図面の簡単な説明】
【0089】
【図1】この発明の実施の形態1に係るナビゲーションシステムの機能的な構成を示すブロック図である。
【図2】この発明の実施の形態1に係るナビゲーションシステムの詳細なハードウェア構成を示すブロック図である。
【図3】この発明の実施の形態1に係るナビゲーションシステムで使用される標高データの格納形式を示す図である。
【図4】この発明の実施の形態1に係るナビゲーションシステムの概略の動作を示すフローチャートである。
【図5】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理を説明するための図である。
【図6】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理で行われる等高線と線分との交点を求める方法を説明するための図である。
【図7】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理において求められる交点を示す図である。
【図8】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理で求められた交点データがメモリに格納される様子を示す図である。
【図9】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理において山を描画する順序を説明するための図である。
【図10】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理において行われる交点の並び替えを説明するための図である。
【図11】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理において交点の並び替後の交点データがメモリに格納される様子を示す図である。
【図12】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理において行われる山の端点の高度を補正する処理を説明するための図である。
【図13】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理において描画される山を自車の進行方向の横から見た図である。
【図14】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理において画面に表示される山を示す図である。
【図15】この発明の実施の形態1に係るナビゲーションシステムにおける山描画処理の詳細を示すフローチャートである。
【図16】この発明の実施の形態2に係るナビゲーションシステムで実行される山描画処理を説明するための図である。
【図17】この発明の実施の形態2に係るナビゲーションシステムで実行される山描画処理において山を描画する順序を説明するための図である。
【図18】この発明の実施の形態2に係るナビゲーションシステムで実行される山描画処理の詳細を示すフローチャートである。
【図19】この発明の実施の形態3に係るナビゲーションシステムで実行される山描画処理を説明するための図である。
【図20】この発明の実施の形態4に係るナビゲーションシステムで実行される山描画処理を説明するための図である。
【図21】この発明の実施の形態5に係るナビゲーションシステムで実行される山描画処理を説明するための図である。
【図22】この発明の実施の形態6に係るナビゲーションシステムで実行される山描画処理を説明するための図である。
【図23】この発明の実施の形態7に係るナビゲーションシステムで実行される山描画処理を説明するための図である。
【図24】この発明の実施の形態7に係るナビゲーションシステムで実行される山描画処理の詳細を示すフローチャートである。
【図25】この発明の実施の形態8に係るナビゲーションシステムで実行される山描画処理を説明するための図である。
【図26】この発明の実施の形態9に係るナビゲーションシステムで実行される山描画処理を説明するための図である。
【符号の説明】
【0090】
1 入力装置、2 記憶装置、3 制御装置、4 表示装置、11 GPSセンサ、12 ジャイロセンサ、13 車速センサ、21 外部記憶装置、22 カーナビゲーションプログラム、23 山描画プログラム、24 地図データ、25 オペレーティングシステム(OS)、31 CPU、32 メモリ、33 表示制御装置、41 表示デバイス。
【特許請求の範囲】
【請求項1】
地図を表示する表示装置と、
車両の乗員の視点で描画された進行方向の景観である乗員視点地図上に山を描画して前記表示装置に表示させる制御装置
とを備えたナビゲーションシステム。
【請求項2】
地図上での視点の位置を表す基準点および進行方向を入力する入力装置と、
標高データを含む地図データを記憶する記憶装置とを備え、
制御装置は、
前記入力装置から入力された基準点を含む地図データを前記記憶装置から取得し、該取得した地図データに含まれる標高データに基づき、前記入力装置から入力された進行方向に存在する山を描画するための山描画データを作成する山描画データ作成手段と、
前記記憶装置から取得した地図データに基づき作成した乗員視点地図上に、前記山描画データ作成手段で作成された山描画データに基づいて山を描画して表示装置に表示させる表示制御装置
とを備えたことを特徴とする請求項1記載のナビゲーションシステム。
【請求項3】
山描画データ作成手段は、
入力装置から入力された基準点に対して所定の関係を有する線と前記記憶装置から取得した地図データに含まれる標高データによって表される等高線との交点を算出し、該算出した交点の標高を結ぶことによって得られる2次元の山を描画するための山描画データを作成することを特徴とする請求項2記載のナビゲーションシステム。
【請求項4】
所定の関係を有する線は、基準点から進行方向に所定の距離だけ離れた点で該進行方向と交差する直線であることを特徴とする請求項3記載のナビゲーションシステム。
【請求項5】
進行方向と交差する直線は、基準点から進行方向に所定の距離だけ離れた点で該進行方向と交差する第1の直線と前記所定の距離からさらに離れた点で該進行方向と交差する第2の直線とを含み、
山描画データ作成手段は、
前記第1の直線と等高線との交点の標高を結ぶことによって得られる第1の2次元の山と、前記第2の直線と前記等高線との交点の標高を結ぶことによって得られる第2の2次元の山とを合成して山描画データを作成することを特徴とする請求項4記載のナビゲーションシステム。
【請求項6】
進行方向と交差する直線は、基準点から進行方向に所定の距離以内において該進行方向と所定間隔で交差する複数の直線と前記所定の距離以上において該進行方向と前記所定間隔より広い間隔で交差する複数の直線とを含み、
山描画データ作成手段は、
前記進行方向と交差する複数の直線の各々と等高線との交点の標高を直線ごとに結ぶことによって得られる複数の2次元の山を合成して山描画データを作成することを特徴とする請求項4記載のナビゲーションシステム。
【請求項7】
進行方向と交差する直線は、基準点から進行方向に向けて等比間隔で広がるように配置された複数の直線を含み、
山描画データ作成手段は、
前記進行方向と交差する複数の直線の各々と等高線との交点の標高を直線ごとに結ぶことによって得られる複数の2次元の山を合成して描画するための山描画データを作成することを特徴とする請求項4記載のナビゲーションシステム。
【請求項8】
所定の関係を有する線は、記憶装置から取得した地図データに含まれる標高データによって表される山頂を通り、進行方向と交差する直線であることを特徴とする請求項3記載のナビゲーションシステム。
【請求項9】
所定の関係を有する線は、基準点から所定の距離だけ離れた点で進行方向と交差する曲線であることを特徴とする請求項3記載のナビゲーションシステム。
【請求項10】
進行方向と交差する曲線は、基準点から所定の距離だけ離れた点で進行方向と交差する第1の曲線と前記所定の距離からさらに離れた点で該進行方向と交差する第2の曲線とを含み、
山描画データ作成手段は、
前記第1の曲線と等高線との交点の標高を結ぶことによって得られる第1の2次元の山と、前記第2の曲線と前記等高線との交点の標高を結ぶことによって得られる第2の2次元の山とを合成して山描画データを作成することを特徴とする請求項9記載のナビゲーションシステム。
【請求項11】
進行方向と交差する曲線は、基準点から所定の距離以内において所定間隔で配置された複数の曲線と前記所定の距離以上において前記所定間隔より広い間隔で配置された複数の曲線とを含み、
山描画データ作成手段は、
前記複数の曲線の各々と等高線との交点の標高を曲線ごとに結ぶことによって得られる複数の2次元の山を合成して山描画データを作成することを特徴とする請求項9記載のナビゲーションシステム。
【請求項12】
進行方向と交差する曲線は、基準点から進行方向に向けて等比間隔で広がるように配置された複数の曲線を含み、
山描画データ作成手段は、
前記複数の曲線の各々と等高線との交点の標高を曲線ごとに結ぶことによって得られる複数の2次元の山を合成して山描画データを作成することを特徴とする請求項9記載のナビゲーションシステム。
【請求項13】
所定の関係を有する線は、記憶装置から取得した地図データに含まれる標高データによって表される山頂を通り、進行方向と交差する曲線であることを特徴とする請求項3記載のナビゲーションシステム。
【請求項14】
山描画データ作成手段は、
前記第1の2次元の山と前記第2の2次元の山とを異なる色で描画するための山描画データを作成することを特徴とする請求項5または請求項10記載のナビゲーションシステム。
【請求項1】
地図を表示する表示装置と、
車両の乗員の視点で描画された進行方向の景観である乗員視点地図上に山を描画して前記表示装置に表示させる制御装置
とを備えたナビゲーションシステム。
【請求項2】
地図上での視点の位置を表す基準点および進行方向を入力する入力装置と、
標高データを含む地図データを記憶する記憶装置とを備え、
制御装置は、
前記入力装置から入力された基準点を含む地図データを前記記憶装置から取得し、該取得した地図データに含まれる標高データに基づき、前記入力装置から入力された進行方向に存在する山を描画するための山描画データを作成する山描画データ作成手段と、
前記記憶装置から取得した地図データに基づき作成した乗員視点地図上に、前記山描画データ作成手段で作成された山描画データに基づいて山を描画して表示装置に表示させる表示制御装置
とを備えたことを特徴とする請求項1記載のナビゲーションシステム。
【請求項3】
山描画データ作成手段は、
入力装置から入力された基準点に対して所定の関係を有する線と前記記憶装置から取得した地図データに含まれる標高データによって表される等高線との交点を算出し、該算出した交点の標高を結ぶことによって得られる2次元の山を描画するための山描画データを作成することを特徴とする請求項2記載のナビゲーションシステム。
【請求項4】
所定の関係を有する線は、基準点から進行方向に所定の距離だけ離れた点で該進行方向と交差する直線であることを特徴とする請求項3記載のナビゲーションシステム。
【請求項5】
進行方向と交差する直線は、基準点から進行方向に所定の距離だけ離れた点で該進行方向と交差する第1の直線と前記所定の距離からさらに離れた点で該進行方向と交差する第2の直線とを含み、
山描画データ作成手段は、
前記第1の直線と等高線との交点の標高を結ぶことによって得られる第1の2次元の山と、前記第2の直線と前記等高線との交点の標高を結ぶことによって得られる第2の2次元の山とを合成して山描画データを作成することを特徴とする請求項4記載のナビゲーションシステム。
【請求項6】
進行方向と交差する直線は、基準点から進行方向に所定の距離以内において該進行方向と所定間隔で交差する複数の直線と前記所定の距離以上において該進行方向と前記所定間隔より広い間隔で交差する複数の直線とを含み、
山描画データ作成手段は、
前記進行方向と交差する複数の直線の各々と等高線との交点の標高を直線ごとに結ぶことによって得られる複数の2次元の山を合成して山描画データを作成することを特徴とする請求項4記載のナビゲーションシステム。
【請求項7】
進行方向と交差する直線は、基準点から進行方向に向けて等比間隔で広がるように配置された複数の直線を含み、
山描画データ作成手段は、
前記進行方向と交差する複数の直線の各々と等高線との交点の標高を直線ごとに結ぶことによって得られる複数の2次元の山を合成して描画するための山描画データを作成することを特徴とする請求項4記載のナビゲーションシステム。
【請求項8】
所定の関係を有する線は、記憶装置から取得した地図データに含まれる標高データによって表される山頂を通り、進行方向と交差する直線であることを特徴とする請求項3記載のナビゲーションシステム。
【請求項9】
所定の関係を有する線は、基準点から所定の距離だけ離れた点で進行方向と交差する曲線であることを特徴とする請求項3記載のナビゲーションシステム。
【請求項10】
進行方向と交差する曲線は、基準点から所定の距離だけ離れた点で進行方向と交差する第1の曲線と前記所定の距離からさらに離れた点で該進行方向と交差する第2の曲線とを含み、
山描画データ作成手段は、
前記第1の曲線と等高線との交点の標高を結ぶことによって得られる第1の2次元の山と、前記第2の曲線と前記等高線との交点の標高を結ぶことによって得られる第2の2次元の山とを合成して山描画データを作成することを特徴とする請求項9記載のナビゲーションシステム。
【請求項11】
進行方向と交差する曲線は、基準点から所定の距離以内において所定間隔で配置された複数の曲線と前記所定の距離以上において前記所定間隔より広い間隔で配置された複数の曲線とを含み、
山描画データ作成手段は、
前記複数の曲線の各々と等高線との交点の標高を曲線ごとに結ぶことによって得られる複数の2次元の山を合成して山描画データを作成することを特徴とする請求項9記載のナビゲーションシステム。
【請求項12】
進行方向と交差する曲線は、基準点から進行方向に向けて等比間隔で広がるように配置された複数の曲線を含み、
山描画データ作成手段は、
前記複数の曲線の各々と等高線との交点の標高を曲線ごとに結ぶことによって得られる複数の2次元の山を合成して山描画データを作成することを特徴とする請求項9記載のナビゲーションシステム。
【請求項13】
所定の関係を有する線は、記憶装置から取得した地図データに含まれる標高データによって表される山頂を通り、進行方向と交差する曲線であることを特徴とする請求項3記載のナビゲーションシステム。
【請求項14】
山描画データ作成手段は、
前記第1の2次元の山と前記第2の2次元の山とを異なる色で描画するための山描画データを作成することを特徴とする請求項5または請求項10記載のナビゲーションシステム。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】

【図14】
【図15】
【図16】
【図17】
【図18】

【図19】
【図20】
【図21】
【図22】

【図23】
【図24】

【図25】
【図26】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【公開番号】特開2006−208816(P2006−208816A)
【公開日】平成18年8月10日(2006.8.10)
【国際特許分類】
【出願番号】特願2005−21843(P2005−21843)
【出願日】平成17年1月28日(2005.1.28)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成18年8月10日(2006.8.10)
【国際特許分類】
【出願日】平成17年1月28日(2005.1.28)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]