
ナビゲーションシステム
【課題】 交差点の近傍において自車のナビゲーション装置の表示部に表示される無駄な情報を削減して運転者の混乱を抑えることができ、ひいては安全で円滑な運転を行わしめることができる「ナビゲーションシステム」を提供すること。
【解決手段】 ナビゲーション装置8は、対向車線上の対向車両7を検出可能とされた検出手段5が、対向車線上に対向車両7を検出した場合に、監視カメラ3が撮影した画像を表示部15に表示する。
【解決手段】 ナビゲーション装置8は、対向車線上の対向車両7を検出可能とされた検出手段5が、対向車線上に対向車両7を検出した場合に、監視カメラ3が撮影した画像を表示部15に表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーションシステムに係り、特に、対向車線上の画像を表示部に表示するのに好適なナビゲーションシステムに関する。
【背景技術】
【0002】
近年、ITS(Intelligent Transport Systems)と称される最先端の情報通信技術を用いて人と道路と車両とを情報でネットワークすることにより、交通事故、渋滞などといった道路交通問題の解決手段を構築する新しい交通システムが採用されている。
【0003】
このような交通システムにおいては、交差点の近傍に設置された監視カメラによって、交差点に臨んだ自車に対する対向車線上の画像を撮影して無線で自車に送信する方法が知られている。
【0004】
このような方法によれば、例えば、自車の右折時において対向車線上の大型トラックの背後を走行する直進車両を、自車のナビ画面で確認することが可能とされていた。
【0005】
【特許文献1】特開2001−6094号公報
【特許文献2】特開2001−202577号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、従来は、対向車線上に車両が存在しないにも関わらず、右折の度にナビ画面に対向車線上の画像を表示していたため、運転者は、監視カメラ側から無駄な情報を提供されることにより、却って混乱してしまうといった問題が生じていた。
【0007】
そこで、本発明は、このような点に鑑みされたものであり、交差点の近傍において自車のナビゲーション装置の表示部に表示される無駄な情報を削減して運転者の混乱を抑えることができ、ひいては安全で円滑な運転を行わしめることができるナビゲーションシステムを提供することを目的とするものである。
【課題を解決するための手段】
【0008】
前述した目的を達成するため、本発明に係るナビゲーションシステムの特徴は、交差点の近傍における自車の対向車線上の画像を撮影する監視カメラを有し、この監視カメラが撮影した前記対向車線上の画像を受信して自車のナビゲーション装置の表示部に表示可能とされたナビゲーションシステムにおいて、前記対向車線上の対向車両を検出可能とされた検出手段を自車に備え、前記ナビゲーション装置は、前記検出手段が前記対向車線上に前記対向車両を検出した場合に、前記監視カメラが撮影した画像を前記表示部に表示する点にある。
【0009】
そして、このような構成によれば、検出手段による対向車両の検出を待って初めて監視カメラが撮影した対向車線上の画像を表示部に表示させることが可能となる。
【0010】
なお、対向車両における「車両」とは、自動車(四輪以外のもの含む)、原動機付自転車および軽車両等を含めた広義の概念とする。
【0011】
また、本発明に係るナビゲーションシステムの特徴は、ナビゲーション装置が、監視カメラが撮影した画像を交差点およびその周辺部の地図上に重ねて表示する点にある。
【0012】
そして、このような構成によれば、監視カメラが撮影した画像を表示部に表示する際に、地図表示から監視カメラが撮影した画像の表示に切替えることを要しないため、監視カメラが撮影した画像を表示部に違和感なく分かりやすく表示させることが可能となる。
【0013】
さらに、本発明に係るナビゲーションシステムの特徴は、ナビゲーション装置が、交差点において自車が右折する場合に、監視カメラが撮影した画像を表示部に表示する点にある。
【0014】
そして、このような構成によれば、対向車両に対して特に注意を要する右折時において、監視カメラが撮影した画像を表示部に表示させることが可能となる。
【0015】
さらにまた、本発明に係るナビゲーションシステムの特徴は、ナビゲーション装置が、自車のウインカまたは経路情報に基づいて自車が右折するか否かを判定する点にある。
【0016】
そして、このような構成によれば、自車が右折するか否かを簡便な手段によって判定することが可能となる。
【0017】
また、本発明に係るナビゲーションシステムの特徴は、監視カメラが撮影した画像を画像認識するための画像認識手段を、自車に備えた点にある。
【0018】
そして、このような構成によれば、監視カメラが撮影した画像を画像認識手段に認識させることによって、認識された画像を車両等のマークとして表示部に表示することが可能となる。
【0019】
さらに、本発明に係るナビゲーションシステムの特徴は、監視カメラが、撮影した画像を画像認識するための画像認識手段を備えた点にある。
【0020】
そして、このような構成によれば、監視カメラが撮影した画像を、監視カメラの画像認識手段に認識させた後に、自車側に送信させることが可能となる。
【0021】
さらにまた、本発明に係るナビゲーションシステムの特徴は、監視カメラが、交差点の近傍に設置されている点にある。
【0022】
そして、このような構成によれば、自車の対向車線上の画像を交差点の近傍に設置された監視カメラによって的確に撮影することが可能となる。
【0023】
また、本発明に係るナビゲーションシステムの特徴は、監視カメラが、対向車両に備えられている点にある。
【0024】
そして、このような構成によれば、対向車線上の対向車両に配置された監視カメラによって、当該対向車両の背後に存在する他の対向車両の画像を的確に撮影することが可能となる。
【0025】
さらに、本発明に係るナビゲーションシステムの特徴は、検出手段が、カメラである点にある。
【0026】
そして、このような構成によれば、カメラによって対向車線上の対向車両を自車側から的確に検出することが可能となる。
【発明の効果】
【0027】
本発明に係るナビゲーションシステムによれば、検出手段による対向車両の検出を待ってはじめて監視カメラが撮影した対向車線上の画像を表示部に表示させることができる結果、交差点の近傍において自車のナビゲーション装置の表示部に表示される無駄な情報を削減して運転者の混乱を抑えることができ、ひいては安全で円滑な運転を行わしめることができる。
【0028】
また、本発明に係るナビゲーションシステムによれば、監視カメラが撮影した画像を表示部に表示する際に、地図表示から監視カメラが撮影した画像の表示に切替えることを要しないため、監視カメラが撮影した画像を表示部に違和感なく分かりやすく表示させることができる結果、運転者の混乱をさらに効果的に抑制してより安全で円滑な運転を行わしめることができる。
【0029】
さらに、本発明に係るナビゲーションシステムによれば、対向車両に対して特に注意を要する右折時において、監視カメラが撮影した画像を表示部に表示させることができる結果、必要最低限の情報のみを表示させることによって、運転者の混乱をさらに有効に抑えることができる。
【0030】
さらにまた、本発明に係るナビゲーションシステムによれば、自車が右折するか否かを簡便な手段によって判定することができる結果、コストをさらに削減することができる。
【0031】
また、本発明に係るナビゲーションシステムによれば、監視カメラが撮影した画像を画像認識手段に認識させることによって、認識された画像を車両等のマークとして描画することができる結果、監視カメラが撮影した対向車線上の画像をより分かりやすく表示させることができる。
【0032】
さらに、本発明に係るナビゲーションシステムによれば、監視カメラが撮影した画像を、監視カメラの画像認識手段に認識させた後に、自車側に送信させることができる結果、自車側の設備コストをさらに削減することができる。
【0033】
さらにまた、本発明に係るナビゲーションシステムによれば、自車の対向車線上の画像を交差点の近傍に設置された監視カメラによって的確に撮影することができる結果、従前から存在する監視カメラをそのまま利用することができ、設備コストを抑えることができる。
【0034】
また、本発明に係るナビゲーションシステムによれば、対向車両に備えられた監視カメラによって、当該対向車両の背後に存在する他の対向車両の画像を的確に撮影することができる結果、構成をよりコンパクトにすることができる。
【0035】
さらに、本発明に係るナビゲーションシステムによれば、カメラによって対向車線上の対向車両を自車側から的確に検出することができる結果、対向車線上の画像を必要なときに確実に表示させることができ、運転の安全性をさらに向上させることができる。
【発明を実施するための最良の形態】
【0036】
以下、本発明に係るナビゲーションシステムの実施形態について、図1乃至図6を参照して説明する。
【0037】
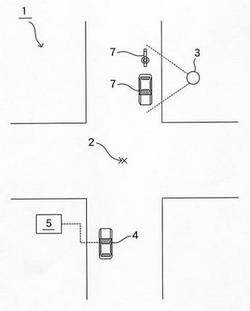
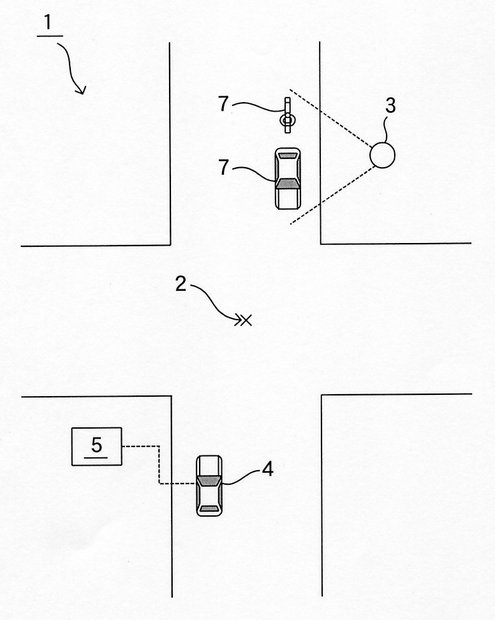
図1に示すように、本実施形態におけるナビゲーションシステム1は、交差点2の近傍位置に設置された監視カメラ3を有しており、この監視カメラ3は、自車4の対向車線上の画像を撮影することによって当該対向車線上の交通状況を監視可能とされている。そして、監視カメラ3は、撮影した画像の信号を送信可能とされている。
【0038】
また、本実施形態におけるナビゲーションシステム1は、自車4側に、検出手段としての検出部5を有しており、この検出部5は、自車4の対向車線上に存在する対向車両7を検出し、検出結果を検出信号として出力するようになっている。なお、検出部5としては、カメラやレーダ等の種々の手段を採用してもよいが、対向車両7を画像認識によって的確に検出する観点からは、カメラであることが好ましい。
【0039】
検出部5がカメラの場合には、検出信号には、カメラによる自車4の前方撮影画像が含まれることになる。
【0040】
さらに、本実施形態におけるナビゲーションシステム1は、自車4側に、図2に示すようなナビゲーション装置8を有しており、このナビゲーション装置8は、監視カメラ3が撮影した画像を受信して表示することができるようになっている。
【0041】
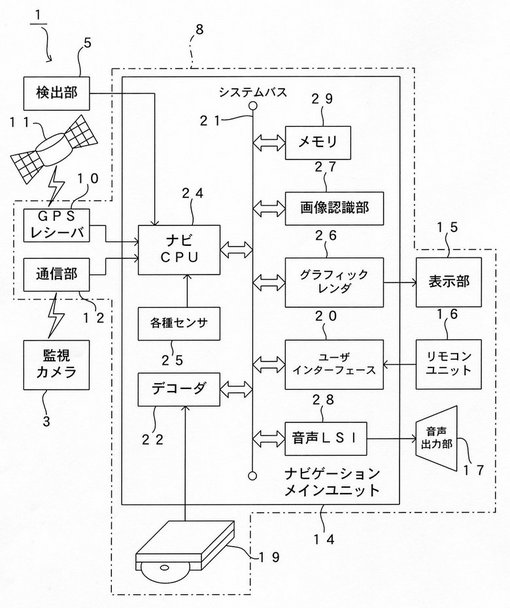
図2に示すように、ナビゲーション装置8は、GPSレシーバ10を有しており、このGPSレシーバ10は、GPS衛星11から軌道と時刻の情報を受信して受信結果を出力するようになっている。
【0042】
また、ナビゲーション装置8は、通信部12を有しており、この通信部12は、監視カメラ3が撮影した画像の信号を通信を介して受信するとともに、受信結果を出力するようになっている。
【0043】
GPSレシーバ10および通信部12には、ナビゲーションメインユニット14が接続されており、このナビゲーションメインユニット14は、自車を目的地まで案内するナビゲーションを行うための種々の制御を行うようになっている。
【0044】
ナビゲーションメインユニット14には、液晶パネル等の表示部15が接続されており、この表示部15は、ナビゲーションメインユニット14によって作成された描画データを表示するようになっている。
【0045】
また、ナビゲーションメインユニット14の入力側には、リモコンユニット16が接続されており、このリモコンユニット16は、操作者の操作によって目的地等の種々の入力情報をナビゲーションメインユニット14に入力するようになっている。
【0046】
さらに、ナビゲーションメインユニット14の出力側には、スピーカ等の音声出力部17が接続されており、この音声出力部17は、ナビゲーションメインユニット14によって作成された音声案内データにしたがって音声案内を行うようになっている。
【0047】
さらにまた、ナビゲーションメインユニット14の入力側には、ディスクドライブ19が接続されており、このディスクドライブ19には、地図データが格納されたCDやDVD等のディスクが搭載可能とされている。
【0048】
次に、ナビゲーションメインユニット14についてさらに詳述すると、このナビゲーションメインユニット14は、リモコンユニット16の出力側に、ユーザインターフェース20を有している。このユーザインターフェース20は、リモコンユニット16によって入力された入力情報をシステムバス21に出力するようになっている。
【0049】
また、ナビゲーションメインユニット14は、ディスクドライブ19の出力側にデコーダ22を有しており、このデコーダ22は、ディスクドライブ19から入力された圧縮された地図データを符号化(解凍)するとともに、符号化した地図データをシステムバス21に出力するようになっている。このデコーダ22は、必要に応じて設けるようにすればよい。
【0050】
さらに、ナビゲーションメインユニット14は、GPSレシーバ10および通信部12の出力側に、ナビCPU24を有しており、このナビCPU24には、GPSレシーバ10の受信結果および通信部12の受信結果がそれぞれ入力されるようになっている。
【0051】
ナビCPU24の入力側には、車速センサやジャイロセンサ等の各種センサ25が接続されており、これら各種センサ25の検出結果が、ナビCPU24に入力されるようになっている。
【0052】
ナビCPU24は、システムバス21を介してリモコンユニット16からの入力情報を取得するとともに、取得した入力情報にしたがって目的地までのルート計算を行うようになっている。そして、ナビCPU24は、ルート計算によって求められたルートに沿って自車を案内するためのルート案内用描画データと、音声案内データを作成する旨の指令信号とを出力するようになっている。
【0053】
なお、ルート案内用描画データには、自車4が交差点に差しかかったときに交差点およびその周辺部の地図を拡大表示するための描画データも含まれている。
【0054】
また、本実施形態において、ナビCPU24は、検出部5の検出結果に基づいて、対向車線上に対向車両7が存在するか否かを判断するようになっている。
【0055】
さらに、ナビCPU24は、自車が右折するか否かを、ウインカの点灯状態またはルート計算によって設定された経路情報に基づいて簡便に判断するようになっている。
【0056】
そして、ナビCPU24は、自車が右折する場合であって、対向車線上に対向車両7が存在する場合にのみ、監視カメラ3に対して、監視カメラ3が撮影した画像を要求する対向車線画像要求信号を送信するようになっている。
【0057】
これにより、ナビCPU24は、監視カメラ3が撮影した画像の信号を通信部12を介して監視カメラ3から受信するようになっている。
【0058】
さらに、ナビCPU24は、監視カメラ3が撮影した画像の信号を受信すると、この画像の信号に対応する監視カメラ用描画データを作成する旨の指令信号を、監視カメラ3が撮影した画像の信号とともに出力するようになっている。
【0059】
なお、これに限らず、監視カメラ3が撮影した画像の信号をナビCPU24に常に受信させるようにし、実際に監視カメラ3が撮影した画像を表示させるか否かを、右折の有無および検出部5の検出結果に基づいてナビCPU24に判断させるようにしてもよい。
【0060】
ナビCPU24には、システムバス21を介してグラフィックレンダ26が接続されており、このグラフィックレンダ26は、ナビCPU24から出力されたルート案内用描画データを作成する旨の指令信号に基づいて、地図データを加工してルート案内用描画データを作成するようになっている。
【0061】
そして、グラフィックレンダ26は、作成したルート案内用描画データを表示部15に対して出力するようになっている。
【0062】
これによって、表示部15に、ルート案内を行うための地図(交差点2およびその周辺部の拡大地図を含む)や地図上の経路等が表示されるようになっている。
【0063】
さらに、グラフィックレンダ26は、ナビCPU24から出力された監視カメラ3が撮影した画像の信号と、監視カメラ用描画データを作成する旨の指令信号とに基づいて、監視カメラ用描画データを作成するようになっている。
【0064】
なお、検出部5がカメラの場合には、グラフィックレンダ26は、当該カメラによって撮影された自車の前方撮影画像と監視カメラ3が撮影した画像とを合成することによって、前記監視カメラ用描画データを作成することになる。
【0065】
そして、グラフィックレンダ26は、作成した監視カメラ用描画データを表示部15に対して出力するようになっている。これによって、表示部15に、監視カメラ3が撮影した対向車両7の画像が表示されるようになっている。
【0066】
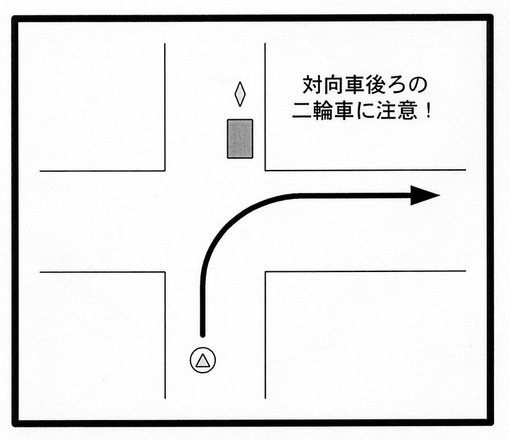
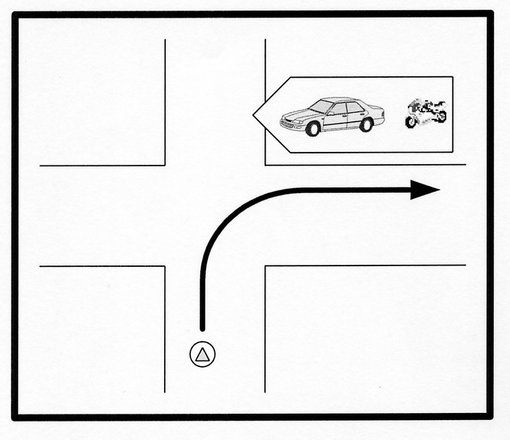
ここで、監視カメラ用描画データは、図3および図4に示すように、前述した交差点2およびその周辺部を示す拡大地図上に、監視カメラ3によって撮影された対向車両7の画像を位置を指定して重ねて表示することを内容としている。
【0067】
なお、図3は、交差点2およびその周辺部を示す拡大地図上における該当位置に、対向車両7をマークとして描画する場合における表示内容である。
【0068】
一方、図4は、監視カメラ3が撮影した対向車両7の画像そのものを縮小して地図上の該当位置に埋設表示する場合における表示内容である。
【0069】
このように、監視カメラ3の画像を拡大地図上に重ねて表示することによって、地図データによる地図表示画面と、監視カメラ3が撮影した画像の表示画面とを切替える必要がなく、交差点近傍における対向車線上の画像を違和感なく分かりやすい状態で表示させることができるようになっている。
【0070】
また、図3に示すように、「対向車両後ろの二輪車に注意!」等の対向車両7に関する注意メッセージを文字表示することによって運転者の注意を喚起するようにしてもよい。
【0071】
ナビCPU24およびグラフィックレンダ26には、システムバス21を介して画像認識部27が接続されており、この画像認識部27は、図3のように対向車両7をマークとして表示する場合に、監視カメラ3が撮影した画像の信号を、対向車両7のマークのデータに変換した後に、グラフィックレンダ26に対して出力するようになっている。これによって、対向車両7のマークを、交差点およびその周辺部の拡大地図上に的確に表示させることができるようになっている。
【0072】
ナビCPU24には、システムバス21を介して音声LSI28が接続されており、この音声LSI28は、ナビCPU24から出力された音声案内データを作成する旨の指令信号に基づいて音声案内データを作成するとともに、この音声案内データを音声出力部17に対して出力するようになっている。これによって、音声出力部17を介して適宜音声案内がなされるようになっている。
【0073】
なお、音声出力部17により、対向車両7の背後に他の対向車両が存在する旨の音声案内を適宜行うことによって、運転者の注意をさらに喚起するようにしてもよい。
【0074】
また、システムバス21には、メモリ29が接続されており、このメモリ29には、ナビゲーション装置8内を行き交う各種のデータや信号の内容が一時的に格納されるようになっている。
【0075】
このように、本実施形態においては、対向車両7に対して特に注意を要する右折時において、自車4側に備えられた検出部5による対向車両7の検出を待ってはじめて監視カメラ3が撮影した対向車線上の画像を表示部15に表示させることができるようになっている。
【0076】
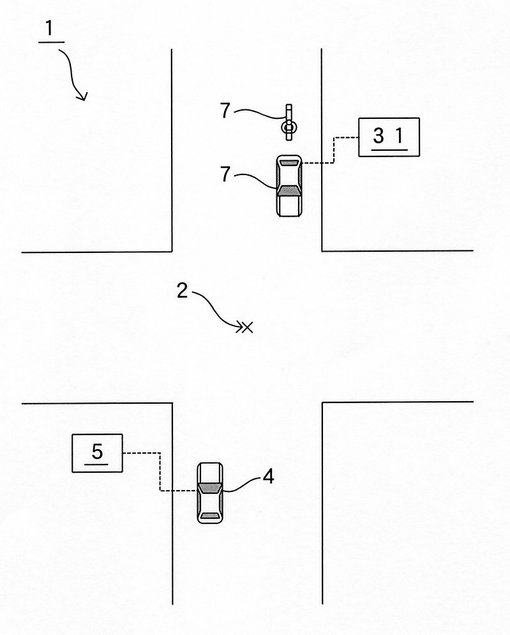
なお、図1および図2に示した構成に限らず、例えば、図5に示すように、監視カメラが、対向車両7に備えられた後方監視カメラ31であってもよい。
【0077】
この場合には、後方監視カメラ31によって、当該対向車両7の背後に存在する二輪車等の他の対向車両7の画像を的確に撮影することができ、自車4側から目視することが困難な対向車両7を表示部15に的確に表示させることができる。
【0078】
なお、ナビゲーションシステムが、交差点2側の監視カメラ3と後方監視カメラ31とを併有し、両者を適宜使い分けるようにしてもよいことは勿論である。
【0079】
さらに、画像認識部27を、ナビゲーション装置8側ではなく監視カメラ3側に備えるようにしてもよい。その場合には、監視カメラ3側において、対向車両7のマークのデータを画像認識によって作成することができる。
【0080】
次に、本実施形態の作用について図6を参照して説明する。
【0081】
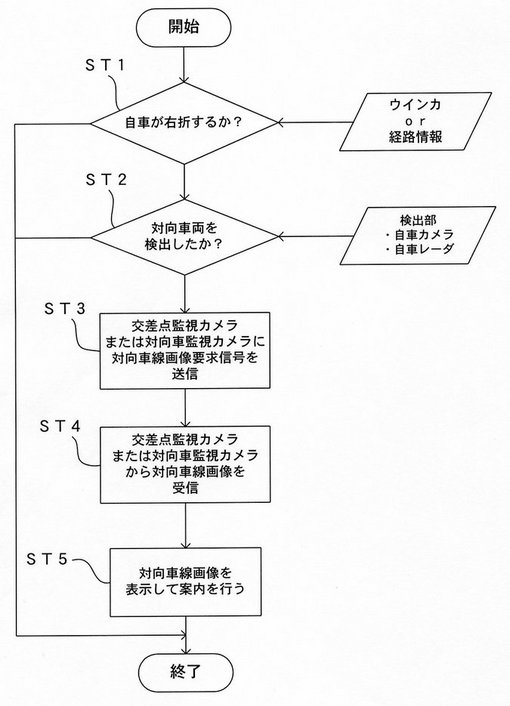
本実施形態においては、対向車両7の表示処理を開始した後、まず、図6のステップ1(ST1)において、ナビCPU24によって自車4が右折するか否かをウインカの点灯状態または経路情報に基づいて判断する。そして、自車4が右折する場合には、ステップ2(ST2)に進み、右折しない場合には、監視カメラ3が撮影した画像は表示せずに処理を終了する。
【0082】
次いで、ステップ2(ST2)においては、ナビCPU24によって、検出部5が対向車線上に対向車両7を検出したか否かを検出部5からの検出結果に基づいて判断し、対向車両7を検出した場合には、ステップ3(ST3)に進み、検出していない場合には、処理を終了する。
【0083】
ステップ3(ST3)においては、ナビCPU24によって、交差点2の監視カメラ3または対向車両7の後方監視カメラ31に対して対向車線画像要求信号を送信する。
【0084】
次いで、ステップ4(ST4)において、ナビCPU24は、交差点2の監視カメラ3または対向車両7の後方監視カメラ31から、対向車線の画像を受信する。
【0085】
最後に、ステップ5(ST5)において、対向車線上の画像を表示部15に表示することによって、交差点2の右折時における自車4の案内を行う。
【0086】
したがって、本実施形態によれば、検出部5による対向車両7の検出を待ってはじめて監視カメラ3が撮影した対向車線7上の画像を表示部15に表示させることができる。この結果、交差点2の近傍において自車4のナビゲーション装置8の表示部15に表示される無駄な情報を削減して運転者の混乱を抑えることができ、ひいては安全で円滑な運転を行わしめることができる。
【0087】
なお、本発明は、前述した実施の形態に限定されるものではなく、必要に応じて種々の変更が可能である。
【図面の簡単な説明】
【0088】
【図1】本発明に係るナビゲーションシステムの実施形態を示す構成図
【図2】本発明に係るナビゲーションシステムの実施形態を示すブロック図
【図3】本発明に係るナビゲーションシステムの実施形態において、表示部の表示内容の一例を示す図
【図4】本発明に係るナビゲーションシステムの実施形態において、表示部の表示内容の図3と異なる他の一例を示す図
【図5】本発明に係るナビゲーションシステムの実施形態において、図1および図2と異なる他の実施形態を示す構成図
【図6】本発明に係るナビゲーションシステムの実施形態を示すフローチャート
【符号の説明】
【0089】
1 ナビゲーションシステム
2 交差点
3 監視カメラ
4 自車
5 検出部
7 対向車両
8 ナビゲーション装置
15 表示部
24 ナビCPU
26 グラフィックレンダ
27 画像認識部
31 後方監視カメラ
【技術分野】
【0001】
本発明は、ナビゲーションシステムに係り、特に、対向車線上の画像を表示部に表示するのに好適なナビゲーションシステムに関する。
【背景技術】
【0002】
近年、ITS(Intelligent Transport Systems)と称される最先端の情報通信技術を用いて人と道路と車両とを情報でネットワークすることにより、交通事故、渋滞などといった道路交通問題の解決手段を構築する新しい交通システムが採用されている。
【0003】
このような交通システムにおいては、交差点の近傍に設置された監視カメラによって、交差点に臨んだ自車に対する対向車線上の画像を撮影して無線で自車に送信する方法が知られている。
【0004】
このような方法によれば、例えば、自車の右折時において対向車線上の大型トラックの背後を走行する直進車両を、自車のナビ画面で確認することが可能とされていた。
【0005】
【特許文献1】特開2001−6094号公報
【特許文献2】特開2001−202577号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、従来は、対向車線上に車両が存在しないにも関わらず、右折の度にナビ画面に対向車線上の画像を表示していたため、運転者は、監視カメラ側から無駄な情報を提供されることにより、却って混乱してしまうといった問題が生じていた。
【0007】
そこで、本発明は、このような点に鑑みされたものであり、交差点の近傍において自車のナビゲーション装置の表示部に表示される無駄な情報を削減して運転者の混乱を抑えることができ、ひいては安全で円滑な運転を行わしめることができるナビゲーションシステムを提供することを目的とするものである。
【課題を解決するための手段】
【0008】
前述した目的を達成するため、本発明に係るナビゲーションシステムの特徴は、交差点の近傍における自車の対向車線上の画像を撮影する監視カメラを有し、この監視カメラが撮影した前記対向車線上の画像を受信して自車のナビゲーション装置の表示部に表示可能とされたナビゲーションシステムにおいて、前記対向車線上の対向車両を検出可能とされた検出手段を自車に備え、前記ナビゲーション装置は、前記検出手段が前記対向車線上に前記対向車両を検出した場合に、前記監視カメラが撮影した画像を前記表示部に表示する点にある。
【0009】
そして、このような構成によれば、検出手段による対向車両の検出を待って初めて監視カメラが撮影した対向車線上の画像を表示部に表示させることが可能となる。
【0010】
なお、対向車両における「車両」とは、自動車(四輪以外のもの含む)、原動機付自転車および軽車両等を含めた広義の概念とする。
【0011】
また、本発明に係るナビゲーションシステムの特徴は、ナビゲーション装置が、監視カメラが撮影した画像を交差点およびその周辺部の地図上に重ねて表示する点にある。
【0012】
そして、このような構成によれば、監視カメラが撮影した画像を表示部に表示する際に、地図表示から監視カメラが撮影した画像の表示に切替えることを要しないため、監視カメラが撮影した画像を表示部に違和感なく分かりやすく表示させることが可能となる。
【0013】
さらに、本発明に係るナビゲーションシステムの特徴は、ナビゲーション装置が、交差点において自車が右折する場合に、監視カメラが撮影した画像を表示部に表示する点にある。
【0014】
そして、このような構成によれば、対向車両に対して特に注意を要する右折時において、監視カメラが撮影した画像を表示部に表示させることが可能となる。
【0015】
さらにまた、本発明に係るナビゲーションシステムの特徴は、ナビゲーション装置が、自車のウインカまたは経路情報に基づいて自車が右折するか否かを判定する点にある。
【0016】
そして、このような構成によれば、自車が右折するか否かを簡便な手段によって判定することが可能となる。
【0017】
また、本発明に係るナビゲーションシステムの特徴は、監視カメラが撮影した画像を画像認識するための画像認識手段を、自車に備えた点にある。
【0018】
そして、このような構成によれば、監視カメラが撮影した画像を画像認識手段に認識させることによって、認識された画像を車両等のマークとして表示部に表示することが可能となる。
【0019】
さらに、本発明に係るナビゲーションシステムの特徴は、監視カメラが、撮影した画像を画像認識するための画像認識手段を備えた点にある。
【0020】
そして、このような構成によれば、監視カメラが撮影した画像を、監視カメラの画像認識手段に認識させた後に、自車側に送信させることが可能となる。
【0021】
さらにまた、本発明に係るナビゲーションシステムの特徴は、監視カメラが、交差点の近傍に設置されている点にある。
【0022】
そして、このような構成によれば、自車の対向車線上の画像を交差点の近傍に設置された監視カメラによって的確に撮影することが可能となる。
【0023】
また、本発明に係るナビゲーションシステムの特徴は、監視カメラが、対向車両に備えられている点にある。
【0024】
そして、このような構成によれば、対向車線上の対向車両に配置された監視カメラによって、当該対向車両の背後に存在する他の対向車両の画像を的確に撮影することが可能となる。
【0025】
さらに、本発明に係るナビゲーションシステムの特徴は、検出手段が、カメラである点にある。
【0026】
そして、このような構成によれば、カメラによって対向車線上の対向車両を自車側から的確に検出することが可能となる。
【発明の効果】
【0027】
本発明に係るナビゲーションシステムによれば、検出手段による対向車両の検出を待ってはじめて監視カメラが撮影した対向車線上の画像を表示部に表示させることができる結果、交差点の近傍において自車のナビゲーション装置の表示部に表示される無駄な情報を削減して運転者の混乱を抑えることができ、ひいては安全で円滑な運転を行わしめることができる。
【0028】
また、本発明に係るナビゲーションシステムによれば、監視カメラが撮影した画像を表示部に表示する際に、地図表示から監視カメラが撮影した画像の表示に切替えることを要しないため、監視カメラが撮影した画像を表示部に違和感なく分かりやすく表示させることができる結果、運転者の混乱をさらに効果的に抑制してより安全で円滑な運転を行わしめることができる。
【0029】
さらに、本発明に係るナビゲーションシステムによれば、対向車両に対して特に注意を要する右折時において、監視カメラが撮影した画像を表示部に表示させることができる結果、必要最低限の情報のみを表示させることによって、運転者の混乱をさらに有効に抑えることができる。
【0030】
さらにまた、本発明に係るナビゲーションシステムによれば、自車が右折するか否かを簡便な手段によって判定することができる結果、コストをさらに削減することができる。
【0031】
また、本発明に係るナビゲーションシステムによれば、監視カメラが撮影した画像を画像認識手段に認識させることによって、認識された画像を車両等のマークとして描画することができる結果、監視カメラが撮影した対向車線上の画像をより分かりやすく表示させることができる。
【0032】
さらに、本発明に係るナビゲーションシステムによれば、監視カメラが撮影した画像を、監視カメラの画像認識手段に認識させた後に、自車側に送信させることができる結果、自車側の設備コストをさらに削減することができる。
【0033】
さらにまた、本発明に係るナビゲーションシステムによれば、自車の対向車線上の画像を交差点の近傍に設置された監視カメラによって的確に撮影することができる結果、従前から存在する監視カメラをそのまま利用することができ、設備コストを抑えることができる。
【0034】
また、本発明に係るナビゲーションシステムによれば、対向車両に備えられた監視カメラによって、当該対向車両の背後に存在する他の対向車両の画像を的確に撮影することができる結果、構成をよりコンパクトにすることができる。
【0035】
さらに、本発明に係るナビゲーションシステムによれば、カメラによって対向車線上の対向車両を自車側から的確に検出することができる結果、対向車線上の画像を必要なときに確実に表示させることができ、運転の安全性をさらに向上させることができる。
【発明を実施するための最良の形態】
【0036】
以下、本発明に係るナビゲーションシステムの実施形態について、図1乃至図6を参照して説明する。
【0037】
図1に示すように、本実施形態におけるナビゲーションシステム1は、交差点2の近傍位置に設置された監視カメラ3を有しており、この監視カメラ3は、自車4の対向車線上の画像を撮影することによって当該対向車線上の交通状況を監視可能とされている。そして、監視カメラ3は、撮影した画像の信号を送信可能とされている。
【0038】
また、本実施形態におけるナビゲーションシステム1は、自車4側に、検出手段としての検出部5を有しており、この検出部5は、自車4の対向車線上に存在する対向車両7を検出し、検出結果を検出信号として出力するようになっている。なお、検出部5としては、カメラやレーダ等の種々の手段を採用してもよいが、対向車両7を画像認識によって的確に検出する観点からは、カメラであることが好ましい。
【0039】
検出部5がカメラの場合には、検出信号には、カメラによる自車4の前方撮影画像が含まれることになる。
【0040】
さらに、本実施形態におけるナビゲーションシステム1は、自車4側に、図2に示すようなナビゲーション装置8を有しており、このナビゲーション装置8は、監視カメラ3が撮影した画像を受信して表示することができるようになっている。
【0041】
図2に示すように、ナビゲーション装置8は、GPSレシーバ10を有しており、このGPSレシーバ10は、GPS衛星11から軌道と時刻の情報を受信して受信結果を出力するようになっている。
【0042】
また、ナビゲーション装置8は、通信部12を有しており、この通信部12は、監視カメラ3が撮影した画像の信号を通信を介して受信するとともに、受信結果を出力するようになっている。
【0043】
GPSレシーバ10および通信部12には、ナビゲーションメインユニット14が接続されており、このナビゲーションメインユニット14は、自車を目的地まで案内するナビゲーションを行うための種々の制御を行うようになっている。
【0044】
ナビゲーションメインユニット14には、液晶パネル等の表示部15が接続されており、この表示部15は、ナビゲーションメインユニット14によって作成された描画データを表示するようになっている。
【0045】
また、ナビゲーションメインユニット14の入力側には、リモコンユニット16が接続されており、このリモコンユニット16は、操作者の操作によって目的地等の種々の入力情報をナビゲーションメインユニット14に入力するようになっている。
【0046】
さらに、ナビゲーションメインユニット14の出力側には、スピーカ等の音声出力部17が接続されており、この音声出力部17は、ナビゲーションメインユニット14によって作成された音声案内データにしたがって音声案内を行うようになっている。
【0047】
さらにまた、ナビゲーションメインユニット14の入力側には、ディスクドライブ19が接続されており、このディスクドライブ19には、地図データが格納されたCDやDVD等のディスクが搭載可能とされている。
【0048】
次に、ナビゲーションメインユニット14についてさらに詳述すると、このナビゲーションメインユニット14は、リモコンユニット16の出力側に、ユーザインターフェース20を有している。このユーザインターフェース20は、リモコンユニット16によって入力された入力情報をシステムバス21に出力するようになっている。
【0049】
また、ナビゲーションメインユニット14は、ディスクドライブ19の出力側にデコーダ22を有しており、このデコーダ22は、ディスクドライブ19から入力された圧縮された地図データを符号化(解凍)するとともに、符号化した地図データをシステムバス21に出力するようになっている。このデコーダ22は、必要に応じて設けるようにすればよい。
【0050】
さらに、ナビゲーションメインユニット14は、GPSレシーバ10および通信部12の出力側に、ナビCPU24を有しており、このナビCPU24には、GPSレシーバ10の受信結果および通信部12の受信結果がそれぞれ入力されるようになっている。
【0051】
ナビCPU24の入力側には、車速センサやジャイロセンサ等の各種センサ25が接続されており、これら各種センサ25の検出結果が、ナビCPU24に入力されるようになっている。
【0052】
ナビCPU24は、システムバス21を介してリモコンユニット16からの入力情報を取得するとともに、取得した入力情報にしたがって目的地までのルート計算を行うようになっている。そして、ナビCPU24は、ルート計算によって求められたルートに沿って自車を案内するためのルート案内用描画データと、音声案内データを作成する旨の指令信号とを出力するようになっている。
【0053】
なお、ルート案内用描画データには、自車4が交差点に差しかかったときに交差点およびその周辺部の地図を拡大表示するための描画データも含まれている。
【0054】
また、本実施形態において、ナビCPU24は、検出部5の検出結果に基づいて、対向車線上に対向車両7が存在するか否かを判断するようになっている。
【0055】
さらに、ナビCPU24は、自車が右折するか否かを、ウインカの点灯状態またはルート計算によって設定された経路情報に基づいて簡便に判断するようになっている。
【0056】
そして、ナビCPU24は、自車が右折する場合であって、対向車線上に対向車両7が存在する場合にのみ、監視カメラ3に対して、監視カメラ3が撮影した画像を要求する対向車線画像要求信号を送信するようになっている。
【0057】
これにより、ナビCPU24は、監視カメラ3が撮影した画像の信号を通信部12を介して監視カメラ3から受信するようになっている。
【0058】
さらに、ナビCPU24は、監視カメラ3が撮影した画像の信号を受信すると、この画像の信号に対応する監視カメラ用描画データを作成する旨の指令信号を、監視カメラ3が撮影した画像の信号とともに出力するようになっている。
【0059】
なお、これに限らず、監視カメラ3が撮影した画像の信号をナビCPU24に常に受信させるようにし、実際に監視カメラ3が撮影した画像を表示させるか否かを、右折の有無および検出部5の検出結果に基づいてナビCPU24に判断させるようにしてもよい。
【0060】
ナビCPU24には、システムバス21を介してグラフィックレンダ26が接続されており、このグラフィックレンダ26は、ナビCPU24から出力されたルート案内用描画データを作成する旨の指令信号に基づいて、地図データを加工してルート案内用描画データを作成するようになっている。
【0061】
そして、グラフィックレンダ26は、作成したルート案内用描画データを表示部15に対して出力するようになっている。
【0062】
これによって、表示部15に、ルート案内を行うための地図(交差点2およびその周辺部の拡大地図を含む)や地図上の経路等が表示されるようになっている。
【0063】
さらに、グラフィックレンダ26は、ナビCPU24から出力された監視カメラ3が撮影した画像の信号と、監視カメラ用描画データを作成する旨の指令信号とに基づいて、監視カメラ用描画データを作成するようになっている。
【0064】
なお、検出部5がカメラの場合には、グラフィックレンダ26は、当該カメラによって撮影された自車の前方撮影画像と監視カメラ3が撮影した画像とを合成することによって、前記監視カメラ用描画データを作成することになる。
【0065】
そして、グラフィックレンダ26は、作成した監視カメラ用描画データを表示部15に対して出力するようになっている。これによって、表示部15に、監視カメラ3が撮影した対向車両7の画像が表示されるようになっている。
【0066】
ここで、監視カメラ用描画データは、図3および図4に示すように、前述した交差点2およびその周辺部を示す拡大地図上に、監視カメラ3によって撮影された対向車両7の画像を位置を指定して重ねて表示することを内容としている。
【0067】
なお、図3は、交差点2およびその周辺部を示す拡大地図上における該当位置に、対向車両7をマークとして描画する場合における表示内容である。
【0068】
一方、図4は、監視カメラ3が撮影した対向車両7の画像そのものを縮小して地図上の該当位置に埋設表示する場合における表示内容である。
【0069】
このように、監視カメラ3の画像を拡大地図上に重ねて表示することによって、地図データによる地図表示画面と、監視カメラ3が撮影した画像の表示画面とを切替える必要がなく、交差点近傍における対向車線上の画像を違和感なく分かりやすい状態で表示させることができるようになっている。
【0070】
また、図3に示すように、「対向車両後ろの二輪車に注意!」等の対向車両7に関する注意メッセージを文字表示することによって運転者の注意を喚起するようにしてもよい。
【0071】
ナビCPU24およびグラフィックレンダ26には、システムバス21を介して画像認識部27が接続されており、この画像認識部27は、図3のように対向車両7をマークとして表示する場合に、監視カメラ3が撮影した画像の信号を、対向車両7のマークのデータに変換した後に、グラフィックレンダ26に対して出力するようになっている。これによって、対向車両7のマークを、交差点およびその周辺部の拡大地図上に的確に表示させることができるようになっている。
【0072】
ナビCPU24には、システムバス21を介して音声LSI28が接続されており、この音声LSI28は、ナビCPU24から出力された音声案内データを作成する旨の指令信号に基づいて音声案内データを作成するとともに、この音声案内データを音声出力部17に対して出力するようになっている。これによって、音声出力部17を介して適宜音声案内がなされるようになっている。
【0073】
なお、音声出力部17により、対向車両7の背後に他の対向車両が存在する旨の音声案内を適宜行うことによって、運転者の注意をさらに喚起するようにしてもよい。
【0074】
また、システムバス21には、メモリ29が接続されており、このメモリ29には、ナビゲーション装置8内を行き交う各種のデータや信号の内容が一時的に格納されるようになっている。
【0075】
このように、本実施形態においては、対向車両7に対して特に注意を要する右折時において、自車4側に備えられた検出部5による対向車両7の検出を待ってはじめて監視カメラ3が撮影した対向車線上の画像を表示部15に表示させることができるようになっている。
【0076】
なお、図1および図2に示した構成に限らず、例えば、図5に示すように、監視カメラが、対向車両7に備えられた後方監視カメラ31であってもよい。
【0077】
この場合には、後方監視カメラ31によって、当該対向車両7の背後に存在する二輪車等の他の対向車両7の画像を的確に撮影することができ、自車4側から目視することが困難な対向車両7を表示部15に的確に表示させることができる。
【0078】
なお、ナビゲーションシステムが、交差点2側の監視カメラ3と後方監視カメラ31とを併有し、両者を適宜使い分けるようにしてもよいことは勿論である。
【0079】
さらに、画像認識部27を、ナビゲーション装置8側ではなく監視カメラ3側に備えるようにしてもよい。その場合には、監視カメラ3側において、対向車両7のマークのデータを画像認識によって作成することができる。
【0080】
次に、本実施形態の作用について図6を参照して説明する。
【0081】
本実施形態においては、対向車両7の表示処理を開始した後、まず、図6のステップ1(ST1)において、ナビCPU24によって自車4が右折するか否かをウインカの点灯状態または経路情報に基づいて判断する。そして、自車4が右折する場合には、ステップ2(ST2)に進み、右折しない場合には、監視カメラ3が撮影した画像は表示せずに処理を終了する。
【0082】
次いで、ステップ2(ST2)においては、ナビCPU24によって、検出部5が対向車線上に対向車両7を検出したか否かを検出部5からの検出結果に基づいて判断し、対向車両7を検出した場合には、ステップ3(ST3)に進み、検出していない場合には、処理を終了する。
【0083】
ステップ3(ST3)においては、ナビCPU24によって、交差点2の監視カメラ3または対向車両7の後方監視カメラ31に対して対向車線画像要求信号を送信する。
【0084】
次いで、ステップ4(ST4)において、ナビCPU24は、交差点2の監視カメラ3または対向車両7の後方監視カメラ31から、対向車線の画像を受信する。
【0085】
最後に、ステップ5(ST5)において、対向車線上の画像を表示部15に表示することによって、交差点2の右折時における自車4の案内を行う。
【0086】
したがって、本実施形態によれば、検出部5による対向車両7の検出を待ってはじめて監視カメラ3が撮影した対向車線7上の画像を表示部15に表示させることができる。この結果、交差点2の近傍において自車4のナビゲーション装置8の表示部15に表示される無駄な情報を削減して運転者の混乱を抑えることができ、ひいては安全で円滑な運転を行わしめることができる。
【0087】
なお、本発明は、前述した実施の形態に限定されるものではなく、必要に応じて種々の変更が可能である。
【図面の簡単な説明】
【0088】
【図1】本発明に係るナビゲーションシステムの実施形態を示す構成図
【図2】本発明に係るナビゲーションシステムの実施形態を示すブロック図
【図3】本発明に係るナビゲーションシステムの実施形態において、表示部の表示内容の一例を示す図
【図4】本発明に係るナビゲーションシステムの実施形態において、表示部の表示内容の図3と異なる他の一例を示す図
【図5】本発明に係るナビゲーションシステムの実施形態において、図1および図2と異なる他の実施形態を示す構成図
【図6】本発明に係るナビゲーションシステムの実施形態を示すフローチャート
【符号の説明】
【0089】
1 ナビゲーションシステム
2 交差点
3 監視カメラ
4 自車
5 検出部
7 対向車両
8 ナビゲーション装置
15 表示部
24 ナビCPU
26 グラフィックレンダ
27 画像認識部
31 後方監視カメラ
【特許請求の範囲】
【請求項1】
交差点の近傍における自車の対向車線上の画像を撮影する監視カメラを有し、この監視カメラが撮影した前記対向車線上の画像を受信して自車のナビゲーション装置の表示部に表示可能とされたナビゲーションシステムにおいて、
前記対向車線上の対向車両を検出可能とされた検出手段を自車に備え、
前記ナビゲーション装置は、前記検出手段が前記対向車線上の対向車両を検出した場合に、前記監視カメラが撮影した画像を前記表示部に表示することを特徴とするナビゲーションシステム。
【請求項2】
前記ナビゲーション装置は、前記監視カメラが撮影した画像を、交差点およびその周辺部の地図上に重ねて表示することを特徴とする請求項1に記載のナビゲーションシステム。
【請求項3】
前記ナビゲーション装置は、交差点において自車が右折する場合に、前記監視カメラが撮影した画像を表示部に表示することを特徴とする請求項1または請求項2に記載のナビゲーションシステム。
【請求項4】
前記ナビゲーション装置は、自車のウインカまたは経路情報に基づいて自車が右折するか否かを判定することを特徴とする請求項3に記載のナビゲーションシステム。
【請求項5】
前記監視カメラが撮影した画像を画像認識するための画像認識手段を、自車に備えたことを特徴とする請求項1乃至請求項4のいずれか1項に記載のナビゲーションシステム。
【請求項6】
前記監視カメラが、撮影した画像を画像認識するための画像認識手段を備えたことを特徴とする請求項1乃至請求項4のいずれか1項に記載のナビゲーションシステム。
【請求項7】
前記監視カメラが、前記交差点の近傍に設置されていることを特徴とする請求項1乃至請求項6のいずれか1項に記載のナビゲーションシステム。
【請求項8】
前記監視カメラが、前記対向車両に備えられていることを特徴とする請求項1乃至請求項6のいずれか1項に記載のナビゲーションシステム。
【請求項9】
前記検出手段が、カメラであることを特徴とする請求項1乃至請求項8のいずれか1項に記載のナビゲーションシステム。
【請求項1】
交差点の近傍における自車の対向車線上の画像を撮影する監視カメラを有し、この監視カメラが撮影した前記対向車線上の画像を受信して自車のナビゲーション装置の表示部に表示可能とされたナビゲーションシステムにおいて、
前記対向車線上の対向車両を検出可能とされた検出手段を自車に備え、
前記ナビゲーション装置は、前記検出手段が前記対向車線上の対向車両を検出した場合に、前記監視カメラが撮影した画像を前記表示部に表示することを特徴とするナビゲーションシステム。
【請求項2】
前記ナビゲーション装置は、前記監視カメラが撮影した画像を、交差点およびその周辺部の地図上に重ねて表示することを特徴とする請求項1に記載のナビゲーションシステム。
【請求項3】
前記ナビゲーション装置は、交差点において自車が右折する場合に、前記監視カメラが撮影した画像を表示部に表示することを特徴とする請求項1または請求項2に記載のナビゲーションシステム。
【請求項4】
前記ナビゲーション装置は、自車のウインカまたは経路情報に基づいて自車が右折するか否かを判定することを特徴とする請求項3に記載のナビゲーションシステム。
【請求項5】
前記監視カメラが撮影した画像を画像認識するための画像認識手段を、自車に備えたことを特徴とする請求項1乃至請求項4のいずれか1項に記載のナビゲーションシステム。
【請求項6】
前記監視カメラが、撮影した画像を画像認識するための画像認識手段を備えたことを特徴とする請求項1乃至請求項4のいずれか1項に記載のナビゲーションシステム。
【請求項7】
前記監視カメラが、前記交差点の近傍に設置されていることを特徴とする請求項1乃至請求項6のいずれか1項に記載のナビゲーションシステム。
【請求項8】
前記監視カメラが、前記対向車両に備えられていることを特徴とする請求項1乃至請求項6のいずれか1項に記載のナビゲーションシステム。
【請求項9】
前記検出手段が、カメラであることを特徴とする請求項1乃至請求項8のいずれか1項に記載のナビゲーションシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2006−4217(P2006−4217A)
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願番号】特願2004−180489(P2004−180489)
【出願日】平成16年6月18日(2004.6.18)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願日】平成16年6月18日(2004.6.18)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]