
ナビゲーションシステム
【課題】自車両の前方を走行する他の車両を追い越す際、自車両及び前方の他車両に対して、追い越しのための適切な通知を行うことのできるナビゲーションシステムを提供する。
【解決手段】自車両の現在位置を検出する現在位置検出手段17と、現在位置及び地図情報に基づき、追い越し車線、登坂車線又は譲り車線である特定車線が自車両の走行方向前方の所定距離以内に接近したことを検出する特定車線接近検出手段14と、自車両に対して前記特定車線を案内する特定車線案内手段26,27と、自車両の走行方向前方に存在する他車両に追い越し通知を行う追い越し通知手段28と、を備えるナビゲーションシステムにおいて、特定車線接近検出手段14が特定車線の接近を検出したとき、特定車線案内手段26,27に前記特定車線を案内させる制御を行う一方、追い越し通知手段28による前記他車両への追い越し通知を禁止する制御を行う制御手段14を備える。
【解決手段】自車両の現在位置を検出する現在位置検出手段17と、現在位置及び地図情報に基づき、追い越し車線、登坂車線又は譲り車線である特定車線が自車両の走行方向前方の所定距離以内に接近したことを検出する特定車線接近検出手段14と、自車両に対して前記特定車線を案内する特定車線案内手段26,27と、自車両の走行方向前方に存在する他車両に追い越し通知を行う追い越し通知手段28と、を備えるナビゲーションシステムにおいて、特定車線接近検出手段14が特定車線の接近を検出したとき、特定車線案内手段26,27に前記特定車線を案内させる制御を行う一方、追い越し通知手段28による前記他車両への追い越し通知を禁止する制御を行う制御手段14を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーションシステムに関し、特に、前方を走行する車両を追い越す際に通知を行う車載型のナビゲーションシステムに関する。
【背景技術】
【0002】
従来から、GPS(Global Positioning System)等により車両の現在位置を検出し、その現在位置をディスプレイに道路地図とともに表示し、また、目的地までの経路を探索してディスプレイに表示することにより、利用者を目的地まで円滑に導くようにしたナビゲーションシステムが知られている。
【0003】
また、このようなナビゲーションシステムには、目的地までの経路を案内する機能に加えて、追い越し車線、登坂車線又は譲り車線が接近した場合に、その情報を表示又は音声によって案内することでドライバの運転を支援する機能を備えたものがある。
【0004】
しかしながら、例えば、前方に車両が存在していない場合や、走行路が渋滞していて追い越しのための車線変更が不可能な場合であるにも係わらず、これらの情報の案内を一律に行うことは、不必要なだけでなく、むしろ煩わしいものとなる。
【0005】
そこで、例えば、特許文献1(特開2007−240338号公報)には、走行路が渋滞しておらず、自車両に後方車両が接近したことを条件として、登坂車線又は譲り車線を案内し、また、走行路が渋滞しておらず、自車両が前方車両に近づいたことを条件として、追い越し車線を案内するようにしたナビゲーションシステムが開示されている。この場合、必要な情報を状況に応じてドライバに提供することにより、無駄な情報提供による煩わしさを回避しつつ、ドライバの利便性を向上させることが可能となる。
【0006】
ところで、このようにして提供される情報に従って前方車両を追い越そうとしても、前方車両の走行速度と自車両の走行速度との差が小さい場合や、前方車両が走行路を譲らない場合には、追い越しが困難となることがある。
【0007】
そこで、特許文献2(特開2005−135312号公報)には、後方車両が前方車両を追い越したいときに、後方車両のドライバが車両に備えられた追い越し通知スイッチを押下することにより、無線通信機能を利用して追い越し通知を前方車両に送信し、前方車両のアラームにブザー音を鳴らす指示を行うとともに、前方車両のモニタに追い越し通知を表示させる指示を行うようにした追い越し通知システムが開示されている。この場合、後方車両からの追い越し通知を受信した前方車両が、受信した追い越し通知に基づいて走行速度を落とし、あるいは、登坂車線や譲り車線に移動することにより、後方車両は、前方車両の追い越しを迅速且つ安全に行うことが可能となる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2007−240338号公報(段落[0016]〜[0018])
【特許文献2】特開2005−135312号公報(請求項1)
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、上記特許文献2の先行技術において、前方に追い越し車線や、登坂車線又は譲り車線があり、後方車両が当該車線に近づいている場合において、前方車両に対して追い越し通知を行うと、前方車両が煩わしい思いをするだけでなく、追い越し通知が原因でトラブルの発生するおそれがある。また、走行路が渋滞しているような場合には、追い越しのための車線変更等ができないため、追い越し通知自体が無意味なものとなる。さらに、前方車両が後方車両からの追い越し通知を受信して走行速度を落としたとしても、例えば、反対車線の前方から車両が近づいているような場合には、危険である。
【0010】
本発明は、上記の問題点を解消することを課題とするものであり、自車両の前方を走行する車両を追い越す際、自車両及び前方の車両に対して、追い越しのための適切な通知を行うことのできるナビゲーションシステムを提供することを目的とするものである。
【課題を解決するための手段】
【0011】
前記課題を解決するために、本願の請求項1にかかる発明は、
自車両の現在位置を検出する現在位置検出手段と、地図情報を記憶する地図情報記憶手段と、前記現在位置および前記地図情報に基づき、追い越し車線、登坂車線または譲り車線である特定車線が自車両の走行方向前方の所定距離以内に接近したことを検出する特定車線接近検出手段と、自車両に対して前記特定車線を案内する特定車線案内手段と、自車両の走行方向前方に存在する他車両に追い越し通知を行う追い越し通知手段と、を備えるナビゲーションシステムにおいて、
前記特定車線接近検出手段が前記特定車線への接近を検出したとき、前記特定車線案内手段に前記特定車線を案内させる制御を行う一方、前記追い越し通知手段による前記他車両への追い越し通知を禁止する制御を行う制御手段を備えることを特徴とする。
【0012】
本願の請求項2にかかる発明は、請求項1記載のナビゲーションシステムにおいて、自車両の走行方向前方に存在する他車両の位置情報を取得する車両位置情報取得手段を備え、
前記制御手段は、前記車線接近検出手段が前記特定車線への接近を検出し、且つ、前記車両位置情報取得手段により取得した前記他車両の位置情報に基づく自車両から前記他車両までの距離が所定距離以内であるとき、前記車線案内手段に前記特定車線を案内させる制御を行う一方、前記追い越し通知手段による前記他車両への追い越し通知を禁止する制御を行うことを特徴とする。
【0013】
本願の請求項3にかかる発明は、請求項2記載のナビゲーションシステムにおいて、前記車両位置情報取得手段は、前記他車両までの距離を測定する距離測定手段により構成されることを特徴とする。
【0014】
本願の請求項4にかかる発明は、請求項2記載のナビゲーションシステムにおいて、前記他車両は、自車両に向かって前方から走行して来る対向車線の車両を含むことを特徴とする。
【0015】
本願の請求項5にかかる発明は、請求項1〜4のいずれか1項に記載のナビゲーションシステムにおいて、目的地を設定する目的地設定手段と、
前記地図情報に基づき、自車両の現在位置または任意の出発地から前記目的地までの経路を探索する経路探索手段と、を備え、
前記特定車線接近検出手段は、前記経路上における前記特定車線への接近を検出することを特徴とする。
【発明の効果】
【0016】
請求項1にかかる発明においては、自車両の現在位置を検出する現在位置検出手段と、地図情報を記憶する地図情報記憶手段と、前記現在位置および前記地図情報に基づき、追い越し車線、登坂車線または譲り車線である特定車線が自車両の走行方向前方の所定距離以内に接近したことを検出する特定車線接近検出手段と、自車両に対して前記特定車線を案内する特定車線案内手段と、自車両の走行方向前方に存在する他車両に追い越し通知を行う追い越し通知手段と、を備えるナビゲーションシステムにおいて、前記特定車線接近検出手段が前記特定車線の接近を検出したとき、前記特定車線案内手段に前記特定車線を案内させる制御を行う一方、前記追い越し通知手段による前記他車両への追い越し通知を禁止する制御を行う制御手段を備える。
【0017】
このような構成によれば、自車両の前方に存在する他車両に対して追い越しのための適切な通知を行うことができる。すなわち、前方の車両に対して無用な追い越し通知を行わないため、当該車両に不快感を与えることがなく、また、追い越しを容易に行うことのできる特定車線の接近をドライバに案内し、特定車線に到達した後、前方の車両の追い越し処理を安全に行うことができる。
【0018】
請求項2にかかる発明においては、請求項1にかかる発明において、自車両の走行方向前方に存在する他車両の位置情報を取得する車両位置情報取得手段を備え、前記制御手段は、前記車線接近検出手段が前記特定車線の接近を検出し、且つ、前記車両位置情報取得手段により取得した前記他車両の位置情報に基づく自車両から前記車両までの距離が所定距離以内であるとき、前記車線案内手段に前記特定車線を案内させる制御を行う一方、前記追い越し通知手段による前記他車両への追い越し通知を禁止する制御を行う。
【0019】
このような構成によれば、追い越しを容易に行うことのできる特定車線が近づいており、且つ、前方の他車両に接近しているときには、前方の他車両への追い越し通知よりも追い越し車線の通知を優先させることにより、特定車線に到達する前の無理な追い越し動作を抑制し、追い越しが容易な特定車線に到達した後、より安全に前方の他車両を追い越すことが可能となる。
【0020】
請求項3にかかる発明においては、請求項2にかかる発明において、前記車両位置情報取得手段は、前記他車両までの距離を測定する距離測定手段により構成することができる。
【0021】
請求項4にかかる発明においては、請求項2にかかる発明において、自車両に向かって前方から走行して来る対向車線の他車両がある場合においても、前方の車両を追い越すための適切な通知を行うことができる。
【0022】
請求項5にかかる発明においては、請求項1〜4のいずれか1項にかかる発明において、目的地を設定する目的地設定手段と、前記地図情報に基づき、自車両の現在位置または任意の出発地から前記目的地までの経路を探索する経路探索手段と、を備え、前記特定車線接近検出手段は、前記経路上における前記特定車線の接近を検出する。
【0023】
この場合、車両が探索された経路に沿って移動する際、その経路上において、前方の車両を追い越すための適切な通知を行うことができる。
【図面の簡単な説明】
【0024】
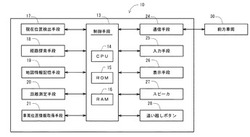
【図1】本発明の実施例にかかるナビゲーションシステムの要部構成を示すブロック図である。
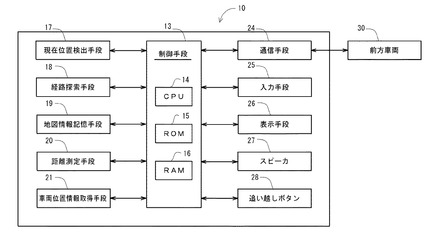
【図2】本発明の実施例にかかるナビゲーションシステムにおける処理のフローチャートである。
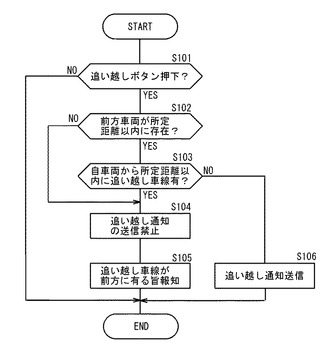
【図3】本発明の実施例にかかるナビゲーションシステムにおいて、車両が走行する道路を模式的に示す説明図である。
【発明を実施するための形態】
【0025】
以下、本発明の具体例を実施例及び図面を用いて詳細に説明する。但し、以下に示す実施形態は、本発明の技術的思想を具体化するためのナビゲーションシステムを例示するものであって、本発明をこのナビゲーションシステムに特定することを意図するものではなく、特許請求の範囲に含まれるその他の実施形態のナビゲーションシステムにも等しく適応し得るものである。
【実施例】
【0026】
図1は、本発明の実施例にかかるナビゲーションシステム10の要部構成を示すブロック図である。
【0027】
ナビゲーションシステム10は、車両に搭載され、現在位置又は任意の出発地から目的地までの経路を探索して利用者に最適な経路を案内する経路探索機能を備えるとともに、車両の移動中における道路状況の案内、例えば、交差点や右左折等の案内、追い越し車線、登坂車線又は譲り車線の有無の案内、その他、走行に必要な種々の案内を行う支援機能を備えている。
【0028】
ナビゲーションシステム10は、制御手段13を備える。制御手段13は、CPU14、ROM15、RAM16からなるプロセッサで構成され、ROM15、RAM16に記録された制御プログラムに従ってCPU14がナビゲーションシステム10の各部の動作を制御するものである。なお、CPU14を含む制御手段13は、後述する特定車線接近検出手段として機能する。
【0029】
現在位置検出手段17は、地球上空を周回している複数のGPS衛星から時刻情報及び位置情報を含む電波を受信するGPS受信機等で構成される。3個以上のGPS衛星からの電波を受信して処理することにより、ナビゲーションシステム10を搭載した車両の現在位置を算出することができる。なお、現在位置検出手段17は、車両が備える距離センサ、方位センサ、舵角センサ等からなる自立航法装置を併用して使用することもでき、また、各種の車両に設けられたセンサを用いることなく、加速度センサやジャイロを内蔵し自律航法手段として現在位置を測位してGPS受信機を用いた測位と併用することもできる。後者の構成とすれば、ナビゲーションシステム10を車載して使用し、また、必要に応じて車両から取り外して携帯型のナビゲーション装置として利用することができる。
【0030】
経路探索手段18は、利用者が入力手段25を用いて目的地を入力することにより、地図情報記憶手段19に記憶されている地図情報を参照し、現在位置又は利用者によって指定された出発地から目的地に至る最適な経路を探索するものである。
【0031】
なお、経路の探索は、現在位置又は出発地に対応するノードから目的地に対応するノードに至るリンクと、ノードとをダイクストラ法等の各種の手法によって探索し、リンク長(リンクコスト)や所要時間等を累積し、総リンク長(移動距離)又は総所要時間等が最短となる経路を探索し、当該経路に属するノードやリンクを経路データとして提供するものである。
【0032】
地図情報記憶手段19は、地図情報、施設情報等の各種情報を記憶する。地図情報には、交差点や合流点等の分岐点をノードとするノードデータ、それぞれのノード間を結ぶ経路をリンクとしたリンクデータ、地形図データが含まれる。
【0033】
ノードデータには、ノード番号、位置座標、接続リンク本数、分岐点名称、ノードが設定される建造物名称等が含まれる他、分岐点から所定距離だけ離れた案内地点において、右左折、直進、車線変更等の経路案内を行う経路案内データ及び案内地点の位置座標が記憶されている。
【0034】
リンクデータには、始点及び終点となるノード番号、道路種別データ(本線、追い越し車線、登坂車線、譲り車線等の特定車線、これらの特定車線の起点位置の情報を含む。)、ノード間の距離情報であるリンク長(リンクコスト)、所要時間等が含まれる。さらに、リンクデータには、リンク属性として橋、トンネル、踏切、料金所等のデータが付与される。
【0035】
地形図データには、海岸線、湖沼、河川形状などの水系データ、行政境界データ、駐車場をはじめとする施設位置、施設形状、施設名称を含む施設データからなる背景データが含まれる。
【0036】
距離測定手段20は、自車両の前方を走行している前方車両30までの距離を測定するものであり、例えば、ナンバープレートの部分に装着されたレーダ装置により構成することができる。レーダ装置は、車両前方に電磁波を放射し、前方車両によって反射された電磁波を受信し、その強度や波長に基づいて前方車両までの距離を測定することができる。
【0037】
車両位置情報取得手段21は、自車両の走行方向前方に存在する前方車両の位置情報を取得するものであり、例えば、自車両と他の車両との間で無線通信により位置情報を送受信する通信装置や、無線LANを介してインフラ設備としての交通情報配信システムにアクセスし、この交通情報配信システムに蓄積されている他の車両の位置情報や渋滞情報等を取得する装置として構成することができる。
【0038】
通信手段24は、自車両と、自車両の前方を走行する前方車両30との間で情報の送受信を行うものである。この場合、送受信する情報には、自車両から前方車両30に送信される追い越し通知信号が含まれる。なお、本実施例では、前方車両30が自車両から送信された追い越し通知信号を受信すると、後続の自車両が追い越しを希望している旨、前方車両30のドライバに報知される。報知の手段としては、前方車両30に搭載されているナビゲーションシステムの表示手段及び/又はスピーカ、あるいは、前方車両30のクラクションとすることができる。
【0039】
なお、本実施例では、車両位置情報取得手段21と通信手段24とを別々の構成として説明したが、通信手段24を車両位置情報取得手段21に含んだ構成とすることもできる。
【0040】
入力手段25は、ナビゲーションシステム10における操作入力や、出発地、目的地、情報を検索するための検索条件等を設定する各種キー、タッチパネル、リモートコントローラ等から構成される。
【0041】
表示手段26は、地図画像、探索した案内経路画像、車線情報等を利用者に表示するものであり、液晶ディスプレイから構成することができる。表示手段26は、ドライバに対して、追い越し車線、登坂車線又は譲り車線を案内する特定車線案内手段として機能する。
【0042】
スピーカ27は、表示手段26に表示される情報と連携した情報を音声データとして利用者に報知するものである。スピーカ27は、表示手段26と同じく、ドライバに対して、追い越し車線、登坂車線又は譲り車線を案内する特定車線案内手段として機能する。
【0043】
追い越しボタン28は、例えば、ハンドル部分等に配設され、ドライバが操作することにより、制御手段13に対して他車両に追い越し通知を出力させるための操作手段である。制御手段13は、追い越しボタン28が操作されたとき、所定の条件に基づき、通信手段24を介して他車両に追い越し通知を出力する追い越し通知手段として機能する。
【0044】
次に、ナビゲーションシステム10による経路探索処理について説明する。
【0045】
経路を探索する場合、利用者は、入力手段25を用いて目的地を設定するとともに、必要に応じて出発地を設定する。目的地等が設定されると、経路探索手段18は、現在位置検出手段17により検出された現在位置、又は、利用者が設定した出発地から、目的地までの経路を探索する。
【0046】
現在位置検出手段17は、GPS衛星から位置情報を含む電波を受信することにより、ナビゲーションシステム10の現在位置を検出する。経路探索手段18は、検出された現在位置に基づき、地図情報記憶手段19から対応する地図情報を抽出し、地図情報を構成するノードデータ及びリンクデータに基づき、例えば、目的地までの所要時間が最も短い経路、又は目的地までの距離が最も短い経路を最適な経路として探索する。
【0047】
探索された経路は、ナビゲーションシステム10の表示手段26に、地図情報とともに表示される。ドライバは、表示された経路に従い、目的地まで移動することができる。なお、ナビゲーションシステム10は、経路に従って移動する間、自車両の現在位置を逐次現在位置検出手段17により検出して表示手段26に表示させるとともに、分岐点や車線情報を含む必要な交通情報を表示手段26及びスピーカ27を用いてドライバに提供する。
【0048】
ここで、本実施例のナビゲーションシステム10では、探索された経路に沿って前方を走行する前方車両30に自車両が接近した場合において、追い越しのための適切な通知処理を行うように構成されている。そこで、追い越し通知を行う場合の処理について、図2に示すフローチャートに従って詳細に説明する。
【0049】
図3は、自車両32が走行する道路を例示したものである。この道路は、本線34とそれに対向する対向車線36とを有し、また、本線34には、途中から追い越し車線38が付設されているものとする。本線34に対する追い越し車線38の起点位置情報は、地図情報を構成するノードに設定されている。なお、図3では、前方車両30及び自車両32に加えて、対向車線36に自車両32の走行方向前方より対向車両40が近づいている状態を示している。
【0050】
図3の状態において、自車両32が本線34を走行している前方車両30に接近し、前方車両30を追い越すべく、自車両32のドライバが追い越しボタン28を押下すると(ステップS101、YES)、追い越し通知信号が制御手段13のCPU14に送信される。CPU14は、追い越し通知信号を受信すると、自車両32から前方車両30までの距離X1を算出する。距離X1は、例えば、レーダ装置から構成される距離測定手段20により測定することができる。
【0051】
測定した距離X1が所定距離以内であるとき(ステップS102、YES)、制御手段13は、現在位置検出手段17により検出された自車両32の現在位置と、地図情報記憶手段19から取得した車線情報に含まれる追い越し車線38の起点位置情報とを用いて、自車両32の現在位置から追い越し車線38の起点位置までの距離X2を算出する。そして、距離X2が所定距離以内であるか否かを判定する。なお、起点位置情報は、地図情報記憶手段19に記憶された道路種別データから得ることができる。
【0052】
距離X2が所定距離以内であり、自車両32から所定距離以内に追い越し車線38が有ると判定すると(ステップS103、YES)、制御手段13は、追い越しボタン28から送信された追い越し通知信号に基づく前方車両30に対する追い越し通知の送信を禁止する(ステップS104)。
【0053】
次いで、制御手段13は、表示手段26及びスピーカ27を制御し、自車両32が追い越し車線38に接近している旨をドライバに報知する(ステップS105)。この場合、ドライバは、報知された追い越し車線38の情報に従い、前方車両30が追い越し車線38に移動するまで本線34の走行を継続する。
【0054】
このように、ドライバが前方車両30の追い越しをしようとする際、走行方向の前方に追い越し車線38が接近しているとき、前方車両30に対する追い越し通知の送信を禁止し、自車両32のナビゲーションシステム10に追い越し車線38に近づいていることを優先して報知することにより、前方車両30が追い越し車線38に移動し、自車両32が追い越し車線38に到達した後、安全に前方車両30を追い越すことができる。また、前方車両30には、自車両32から追い越しをする旨の追い越し通知が送信されないため、前方車両30のドライバが煩わしい思いをすることもない。さらに、自車両32のドライバが前方車両30を無理に追い越すことを抑制できることが期待されるため、走行の安全性も向上する。
【0055】
一方、追い越しボタン28が押下された場合であっても(ステップS101、YES)、自車両32から前方車両30までの距離X1が所定距離を超えているときには(ステップS102、NO)、自車両32が前方車両30に接近するまで追い越し通知を送信しない。これにより、前方車両30は、後方の車両から無用な追い越し通知を受信することがないため、それによる煩わしさを回避することができる。
【0056】
また、追い越しボタン28が押下された場合において、自車両32から前方車両30までの距離X1が所定距離以内であるが(ステップS102、YES)、自車両32から所定距離以内に追い越し車線38が無いときには(ステップS103、NO)、制御手段14は、通信手段24を介して前方車両30に追い越し通知を送信する(ステップS106)。後方の自車両32から追い越し通知を受信した前方車両30は、後方の自車両32が追い越しの意思表示を行っていることをナビゲーションシステムの表示手段及び/又はスピーカを用いてドライバに報知することにより、例えば、減速し、あるいは、路肩に車両を寄せる等の動作を促して追い越しを容易に行わせることができる。また、前方車両30は、送信された追い越し通知に基づき、後方の自車両32が追い越しの意思表示を行っていることを認識し、追い越す車両に注意することができる。
【0057】
なお、前方車両30までの距離X1及び追い越し車線38までの距離X2に従って所定の追い越し通知を行うのに加え、対向車線36を走行して接近する対向車両40までの距離X3を測定し、この距離X3を条件に加えて適切な追い越しのための通知を行うようにしてもよい。
【0058】
例えば、対向車両40までの距離X3が所定距離以上離れている場合には、ゆとりを持って前方車両30を追い越すことができるため、前方車両30が所定距離以内であり、且つ、追い越し車線38が所定距離以内にある場合であっても、前方車両30に対して追い越し通知を送信し、後方の自車両32が追い越す意思があることを認識させ、迅速に追い越し動作を行わせることができる。また、自車両32から対向車両40までの距離X3が所定距離以内の場合には、危険であるため、追い越しをかけないよう、前方車両30への追い越し通知信号の送信を禁止し、追い越し車線38の案内を優先させるようにすることが望ましい。
【0059】
この場合、距離X3は、前方車両30までの距離X1を測定する場合と同様に、距離測定手段20を用いて対向車両40までの距離X3を直接測定して得ることが可能である。また、車両位置情報取得手段21を用いて、対向車両40との間で無線通信により位置情報を取得し、あるいは、交通情報配信システムから対向車両40の位置情報を取得することもできる。
【0060】
なお、本発明は、上述した実施例に限定されるものではなく、本発明の要旨を逸脱しない範囲で変更することが可能である。
【0061】
例えば、特定車線として、登坂車線又は譲り車線が接近していることを自車両32のドライバに案内し、前方車両30への追い越し通知の送信を禁止することにより、前方車両30が登坂車線又は譲り車線に移動するまで、追い越し処理を抑制するようにしてもよい。
【0062】
また、ドライバが追い越しボタン28を押下して前方車両30の追い越しの意思表示を行ったとき、前方車両30が自車両32から所定距離以内にない場合であっても、自車両32から所定距離以内に追い越し車線38、登坂車線又は譲り車線がある場合には、自車両32のドライバにこれらの車線が接近していることを案内する一方、前方車両30に対する追い越し通知信号の送信を禁止することにより、無理な追い越し動作を抑制して、走行の安全を図ることが可能となる。
【0063】
また、上述した実施例では、自車両32の走行方向と同じ方向に走行する前方車両30に対して追い越し通知を送信するものとして説明したが、対向車線36を接近してくる対向車両40に対しても、追い越し通知を送信するものであってもよい。
【0064】
さらに、追い越し車線38の案内、追い越し通知の送信又は禁止を判定するための各距離X1、X2、X3は、前方車両30、自車両32及び対向車両40の移動速度の関数からなる変数として設定することもできる。
【符号の説明】
【0065】
10・・・ナビゲーションシステム
13・・・制御手段
14・・・CPU
15・・・ROM
16・・・RAM
17・・・現在位置検出手段
18・・・経路探索手段
19・・・地図情報記憶手段
20・・・距離測定手段
21・・・車両位置情報取得手段
24・・・通信手段
25・・・入力手段
26・・・表示手段
27・・・スピーカ
28・・・追い越しボタン
30・・・前方車両
32・・・自車両
34・・・本線
36・・・対向車線
38・・・追い越し車線
40・・・対向車両
【技術分野】
【0001】
本発明は、ナビゲーションシステムに関し、特に、前方を走行する車両を追い越す際に通知を行う車載型のナビゲーションシステムに関する。
【背景技術】
【0002】
従来から、GPS(Global Positioning System)等により車両の現在位置を検出し、その現在位置をディスプレイに道路地図とともに表示し、また、目的地までの経路を探索してディスプレイに表示することにより、利用者を目的地まで円滑に導くようにしたナビゲーションシステムが知られている。
【0003】
また、このようなナビゲーションシステムには、目的地までの経路を案内する機能に加えて、追い越し車線、登坂車線又は譲り車線が接近した場合に、その情報を表示又は音声によって案内することでドライバの運転を支援する機能を備えたものがある。
【0004】
しかしながら、例えば、前方に車両が存在していない場合や、走行路が渋滞していて追い越しのための車線変更が不可能な場合であるにも係わらず、これらの情報の案内を一律に行うことは、不必要なだけでなく、むしろ煩わしいものとなる。
【0005】
そこで、例えば、特許文献1(特開2007−240338号公報)には、走行路が渋滞しておらず、自車両に後方車両が接近したことを条件として、登坂車線又は譲り車線を案内し、また、走行路が渋滞しておらず、自車両が前方車両に近づいたことを条件として、追い越し車線を案内するようにしたナビゲーションシステムが開示されている。この場合、必要な情報を状況に応じてドライバに提供することにより、無駄な情報提供による煩わしさを回避しつつ、ドライバの利便性を向上させることが可能となる。
【0006】
ところで、このようにして提供される情報に従って前方車両を追い越そうとしても、前方車両の走行速度と自車両の走行速度との差が小さい場合や、前方車両が走行路を譲らない場合には、追い越しが困難となることがある。
【0007】
そこで、特許文献2(特開2005−135312号公報)には、後方車両が前方車両を追い越したいときに、後方車両のドライバが車両に備えられた追い越し通知スイッチを押下することにより、無線通信機能を利用して追い越し通知を前方車両に送信し、前方車両のアラームにブザー音を鳴らす指示を行うとともに、前方車両のモニタに追い越し通知を表示させる指示を行うようにした追い越し通知システムが開示されている。この場合、後方車両からの追い越し通知を受信した前方車両が、受信した追い越し通知に基づいて走行速度を落とし、あるいは、登坂車線や譲り車線に移動することにより、後方車両は、前方車両の追い越しを迅速且つ安全に行うことが可能となる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2007−240338号公報(段落[0016]〜[0018])
【特許文献2】特開2005−135312号公報(請求項1)
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、上記特許文献2の先行技術において、前方に追い越し車線や、登坂車線又は譲り車線があり、後方車両が当該車線に近づいている場合において、前方車両に対して追い越し通知を行うと、前方車両が煩わしい思いをするだけでなく、追い越し通知が原因でトラブルの発生するおそれがある。また、走行路が渋滞しているような場合には、追い越しのための車線変更等ができないため、追い越し通知自体が無意味なものとなる。さらに、前方車両が後方車両からの追い越し通知を受信して走行速度を落としたとしても、例えば、反対車線の前方から車両が近づいているような場合には、危険である。
【0010】
本発明は、上記の問題点を解消することを課題とするものであり、自車両の前方を走行する車両を追い越す際、自車両及び前方の車両に対して、追い越しのための適切な通知を行うことのできるナビゲーションシステムを提供することを目的とするものである。
【課題を解決するための手段】
【0011】
前記課題を解決するために、本願の請求項1にかかる発明は、
自車両の現在位置を検出する現在位置検出手段と、地図情報を記憶する地図情報記憶手段と、前記現在位置および前記地図情報に基づき、追い越し車線、登坂車線または譲り車線である特定車線が自車両の走行方向前方の所定距離以内に接近したことを検出する特定車線接近検出手段と、自車両に対して前記特定車線を案内する特定車線案内手段と、自車両の走行方向前方に存在する他車両に追い越し通知を行う追い越し通知手段と、を備えるナビゲーションシステムにおいて、
前記特定車線接近検出手段が前記特定車線への接近を検出したとき、前記特定車線案内手段に前記特定車線を案内させる制御を行う一方、前記追い越し通知手段による前記他車両への追い越し通知を禁止する制御を行う制御手段を備えることを特徴とする。
【0012】
本願の請求項2にかかる発明は、請求項1記載のナビゲーションシステムにおいて、自車両の走行方向前方に存在する他車両の位置情報を取得する車両位置情報取得手段を備え、
前記制御手段は、前記車線接近検出手段が前記特定車線への接近を検出し、且つ、前記車両位置情報取得手段により取得した前記他車両の位置情報に基づく自車両から前記他車両までの距離が所定距離以内であるとき、前記車線案内手段に前記特定車線を案内させる制御を行う一方、前記追い越し通知手段による前記他車両への追い越し通知を禁止する制御を行うことを特徴とする。
【0013】
本願の請求項3にかかる発明は、請求項2記載のナビゲーションシステムにおいて、前記車両位置情報取得手段は、前記他車両までの距離を測定する距離測定手段により構成されることを特徴とする。
【0014】
本願の請求項4にかかる発明は、請求項2記載のナビゲーションシステムにおいて、前記他車両は、自車両に向かって前方から走行して来る対向車線の車両を含むことを特徴とする。
【0015】
本願の請求項5にかかる発明は、請求項1〜4のいずれか1項に記載のナビゲーションシステムにおいて、目的地を設定する目的地設定手段と、
前記地図情報に基づき、自車両の現在位置または任意の出発地から前記目的地までの経路を探索する経路探索手段と、を備え、
前記特定車線接近検出手段は、前記経路上における前記特定車線への接近を検出することを特徴とする。
【発明の効果】
【0016】
請求項1にかかる発明においては、自車両の現在位置を検出する現在位置検出手段と、地図情報を記憶する地図情報記憶手段と、前記現在位置および前記地図情報に基づき、追い越し車線、登坂車線または譲り車線である特定車線が自車両の走行方向前方の所定距離以内に接近したことを検出する特定車線接近検出手段と、自車両に対して前記特定車線を案内する特定車線案内手段と、自車両の走行方向前方に存在する他車両に追い越し通知を行う追い越し通知手段と、を備えるナビゲーションシステムにおいて、前記特定車線接近検出手段が前記特定車線の接近を検出したとき、前記特定車線案内手段に前記特定車線を案内させる制御を行う一方、前記追い越し通知手段による前記他車両への追い越し通知を禁止する制御を行う制御手段を備える。
【0017】
このような構成によれば、自車両の前方に存在する他車両に対して追い越しのための適切な通知を行うことができる。すなわち、前方の車両に対して無用な追い越し通知を行わないため、当該車両に不快感を与えることがなく、また、追い越しを容易に行うことのできる特定車線の接近をドライバに案内し、特定車線に到達した後、前方の車両の追い越し処理を安全に行うことができる。
【0018】
請求項2にかかる発明においては、請求項1にかかる発明において、自車両の走行方向前方に存在する他車両の位置情報を取得する車両位置情報取得手段を備え、前記制御手段は、前記車線接近検出手段が前記特定車線の接近を検出し、且つ、前記車両位置情報取得手段により取得した前記他車両の位置情報に基づく自車両から前記車両までの距離が所定距離以内であるとき、前記車線案内手段に前記特定車線を案内させる制御を行う一方、前記追い越し通知手段による前記他車両への追い越し通知を禁止する制御を行う。
【0019】
このような構成によれば、追い越しを容易に行うことのできる特定車線が近づいており、且つ、前方の他車両に接近しているときには、前方の他車両への追い越し通知よりも追い越し車線の通知を優先させることにより、特定車線に到達する前の無理な追い越し動作を抑制し、追い越しが容易な特定車線に到達した後、より安全に前方の他車両を追い越すことが可能となる。
【0020】
請求項3にかかる発明においては、請求項2にかかる発明において、前記車両位置情報取得手段は、前記他車両までの距離を測定する距離測定手段により構成することができる。
【0021】
請求項4にかかる発明においては、請求項2にかかる発明において、自車両に向かって前方から走行して来る対向車線の他車両がある場合においても、前方の車両を追い越すための適切な通知を行うことができる。
【0022】
請求項5にかかる発明においては、請求項1〜4のいずれか1項にかかる発明において、目的地を設定する目的地設定手段と、前記地図情報に基づき、自車両の現在位置または任意の出発地から前記目的地までの経路を探索する経路探索手段と、を備え、前記特定車線接近検出手段は、前記経路上における前記特定車線の接近を検出する。
【0023】
この場合、車両が探索された経路に沿って移動する際、その経路上において、前方の車両を追い越すための適切な通知を行うことができる。
【図面の簡単な説明】
【0024】
【図1】本発明の実施例にかかるナビゲーションシステムの要部構成を示すブロック図である。
【図2】本発明の実施例にかかるナビゲーションシステムにおける処理のフローチャートである。
【図3】本発明の実施例にかかるナビゲーションシステムにおいて、車両が走行する道路を模式的に示す説明図である。
【発明を実施するための形態】
【0025】
以下、本発明の具体例を実施例及び図面を用いて詳細に説明する。但し、以下に示す実施形態は、本発明の技術的思想を具体化するためのナビゲーションシステムを例示するものであって、本発明をこのナビゲーションシステムに特定することを意図するものではなく、特許請求の範囲に含まれるその他の実施形態のナビゲーションシステムにも等しく適応し得るものである。
【実施例】
【0026】
図1は、本発明の実施例にかかるナビゲーションシステム10の要部構成を示すブロック図である。
【0027】
ナビゲーションシステム10は、車両に搭載され、現在位置又は任意の出発地から目的地までの経路を探索して利用者に最適な経路を案内する経路探索機能を備えるとともに、車両の移動中における道路状況の案内、例えば、交差点や右左折等の案内、追い越し車線、登坂車線又は譲り車線の有無の案内、その他、走行に必要な種々の案内を行う支援機能を備えている。
【0028】
ナビゲーションシステム10は、制御手段13を備える。制御手段13は、CPU14、ROM15、RAM16からなるプロセッサで構成され、ROM15、RAM16に記録された制御プログラムに従ってCPU14がナビゲーションシステム10の各部の動作を制御するものである。なお、CPU14を含む制御手段13は、後述する特定車線接近検出手段として機能する。
【0029】
現在位置検出手段17は、地球上空を周回している複数のGPS衛星から時刻情報及び位置情報を含む電波を受信するGPS受信機等で構成される。3個以上のGPS衛星からの電波を受信して処理することにより、ナビゲーションシステム10を搭載した車両の現在位置を算出することができる。なお、現在位置検出手段17は、車両が備える距離センサ、方位センサ、舵角センサ等からなる自立航法装置を併用して使用することもでき、また、各種の車両に設けられたセンサを用いることなく、加速度センサやジャイロを内蔵し自律航法手段として現在位置を測位してGPS受信機を用いた測位と併用することもできる。後者の構成とすれば、ナビゲーションシステム10を車載して使用し、また、必要に応じて車両から取り外して携帯型のナビゲーション装置として利用することができる。
【0030】
経路探索手段18は、利用者が入力手段25を用いて目的地を入力することにより、地図情報記憶手段19に記憶されている地図情報を参照し、現在位置又は利用者によって指定された出発地から目的地に至る最適な経路を探索するものである。
【0031】
なお、経路の探索は、現在位置又は出発地に対応するノードから目的地に対応するノードに至るリンクと、ノードとをダイクストラ法等の各種の手法によって探索し、リンク長(リンクコスト)や所要時間等を累積し、総リンク長(移動距離)又は総所要時間等が最短となる経路を探索し、当該経路に属するノードやリンクを経路データとして提供するものである。
【0032】
地図情報記憶手段19は、地図情報、施設情報等の各種情報を記憶する。地図情報には、交差点や合流点等の分岐点をノードとするノードデータ、それぞれのノード間を結ぶ経路をリンクとしたリンクデータ、地形図データが含まれる。
【0033】
ノードデータには、ノード番号、位置座標、接続リンク本数、分岐点名称、ノードが設定される建造物名称等が含まれる他、分岐点から所定距離だけ離れた案内地点において、右左折、直進、車線変更等の経路案内を行う経路案内データ及び案内地点の位置座標が記憶されている。
【0034】
リンクデータには、始点及び終点となるノード番号、道路種別データ(本線、追い越し車線、登坂車線、譲り車線等の特定車線、これらの特定車線の起点位置の情報を含む。)、ノード間の距離情報であるリンク長(リンクコスト)、所要時間等が含まれる。さらに、リンクデータには、リンク属性として橋、トンネル、踏切、料金所等のデータが付与される。
【0035】
地形図データには、海岸線、湖沼、河川形状などの水系データ、行政境界データ、駐車場をはじめとする施設位置、施設形状、施設名称を含む施設データからなる背景データが含まれる。
【0036】
距離測定手段20は、自車両の前方を走行している前方車両30までの距離を測定するものであり、例えば、ナンバープレートの部分に装着されたレーダ装置により構成することができる。レーダ装置は、車両前方に電磁波を放射し、前方車両によって反射された電磁波を受信し、その強度や波長に基づいて前方車両までの距離を測定することができる。
【0037】
車両位置情報取得手段21は、自車両の走行方向前方に存在する前方車両の位置情報を取得するものであり、例えば、自車両と他の車両との間で無線通信により位置情報を送受信する通信装置や、無線LANを介してインフラ設備としての交通情報配信システムにアクセスし、この交通情報配信システムに蓄積されている他の車両の位置情報や渋滞情報等を取得する装置として構成することができる。
【0038】
通信手段24は、自車両と、自車両の前方を走行する前方車両30との間で情報の送受信を行うものである。この場合、送受信する情報には、自車両から前方車両30に送信される追い越し通知信号が含まれる。なお、本実施例では、前方車両30が自車両から送信された追い越し通知信号を受信すると、後続の自車両が追い越しを希望している旨、前方車両30のドライバに報知される。報知の手段としては、前方車両30に搭載されているナビゲーションシステムの表示手段及び/又はスピーカ、あるいは、前方車両30のクラクションとすることができる。
【0039】
なお、本実施例では、車両位置情報取得手段21と通信手段24とを別々の構成として説明したが、通信手段24を車両位置情報取得手段21に含んだ構成とすることもできる。
【0040】
入力手段25は、ナビゲーションシステム10における操作入力や、出発地、目的地、情報を検索するための検索条件等を設定する各種キー、タッチパネル、リモートコントローラ等から構成される。
【0041】
表示手段26は、地図画像、探索した案内経路画像、車線情報等を利用者に表示するものであり、液晶ディスプレイから構成することができる。表示手段26は、ドライバに対して、追い越し車線、登坂車線又は譲り車線を案内する特定車線案内手段として機能する。
【0042】
スピーカ27は、表示手段26に表示される情報と連携した情報を音声データとして利用者に報知するものである。スピーカ27は、表示手段26と同じく、ドライバに対して、追い越し車線、登坂車線又は譲り車線を案内する特定車線案内手段として機能する。
【0043】
追い越しボタン28は、例えば、ハンドル部分等に配設され、ドライバが操作することにより、制御手段13に対して他車両に追い越し通知を出力させるための操作手段である。制御手段13は、追い越しボタン28が操作されたとき、所定の条件に基づき、通信手段24を介して他車両に追い越し通知を出力する追い越し通知手段として機能する。
【0044】
次に、ナビゲーションシステム10による経路探索処理について説明する。
【0045】
経路を探索する場合、利用者は、入力手段25を用いて目的地を設定するとともに、必要に応じて出発地を設定する。目的地等が設定されると、経路探索手段18は、現在位置検出手段17により検出された現在位置、又は、利用者が設定した出発地から、目的地までの経路を探索する。
【0046】
現在位置検出手段17は、GPS衛星から位置情報を含む電波を受信することにより、ナビゲーションシステム10の現在位置を検出する。経路探索手段18は、検出された現在位置に基づき、地図情報記憶手段19から対応する地図情報を抽出し、地図情報を構成するノードデータ及びリンクデータに基づき、例えば、目的地までの所要時間が最も短い経路、又は目的地までの距離が最も短い経路を最適な経路として探索する。
【0047】
探索された経路は、ナビゲーションシステム10の表示手段26に、地図情報とともに表示される。ドライバは、表示された経路に従い、目的地まで移動することができる。なお、ナビゲーションシステム10は、経路に従って移動する間、自車両の現在位置を逐次現在位置検出手段17により検出して表示手段26に表示させるとともに、分岐点や車線情報を含む必要な交通情報を表示手段26及びスピーカ27を用いてドライバに提供する。
【0048】
ここで、本実施例のナビゲーションシステム10では、探索された経路に沿って前方を走行する前方車両30に自車両が接近した場合において、追い越しのための適切な通知処理を行うように構成されている。そこで、追い越し通知を行う場合の処理について、図2に示すフローチャートに従って詳細に説明する。
【0049】
図3は、自車両32が走行する道路を例示したものである。この道路は、本線34とそれに対向する対向車線36とを有し、また、本線34には、途中から追い越し車線38が付設されているものとする。本線34に対する追い越し車線38の起点位置情報は、地図情報を構成するノードに設定されている。なお、図3では、前方車両30及び自車両32に加えて、対向車線36に自車両32の走行方向前方より対向車両40が近づいている状態を示している。
【0050】
図3の状態において、自車両32が本線34を走行している前方車両30に接近し、前方車両30を追い越すべく、自車両32のドライバが追い越しボタン28を押下すると(ステップS101、YES)、追い越し通知信号が制御手段13のCPU14に送信される。CPU14は、追い越し通知信号を受信すると、自車両32から前方車両30までの距離X1を算出する。距離X1は、例えば、レーダ装置から構成される距離測定手段20により測定することができる。
【0051】
測定した距離X1が所定距離以内であるとき(ステップS102、YES)、制御手段13は、現在位置検出手段17により検出された自車両32の現在位置と、地図情報記憶手段19から取得した車線情報に含まれる追い越し車線38の起点位置情報とを用いて、自車両32の現在位置から追い越し車線38の起点位置までの距離X2を算出する。そして、距離X2が所定距離以内であるか否かを判定する。なお、起点位置情報は、地図情報記憶手段19に記憶された道路種別データから得ることができる。
【0052】
距離X2が所定距離以内であり、自車両32から所定距離以内に追い越し車線38が有ると判定すると(ステップS103、YES)、制御手段13は、追い越しボタン28から送信された追い越し通知信号に基づく前方車両30に対する追い越し通知の送信を禁止する(ステップS104)。
【0053】
次いで、制御手段13は、表示手段26及びスピーカ27を制御し、自車両32が追い越し車線38に接近している旨をドライバに報知する(ステップS105)。この場合、ドライバは、報知された追い越し車線38の情報に従い、前方車両30が追い越し車線38に移動するまで本線34の走行を継続する。
【0054】
このように、ドライバが前方車両30の追い越しをしようとする際、走行方向の前方に追い越し車線38が接近しているとき、前方車両30に対する追い越し通知の送信を禁止し、自車両32のナビゲーションシステム10に追い越し車線38に近づいていることを優先して報知することにより、前方車両30が追い越し車線38に移動し、自車両32が追い越し車線38に到達した後、安全に前方車両30を追い越すことができる。また、前方車両30には、自車両32から追い越しをする旨の追い越し通知が送信されないため、前方車両30のドライバが煩わしい思いをすることもない。さらに、自車両32のドライバが前方車両30を無理に追い越すことを抑制できることが期待されるため、走行の安全性も向上する。
【0055】
一方、追い越しボタン28が押下された場合であっても(ステップS101、YES)、自車両32から前方車両30までの距離X1が所定距離を超えているときには(ステップS102、NO)、自車両32が前方車両30に接近するまで追い越し通知を送信しない。これにより、前方車両30は、後方の車両から無用な追い越し通知を受信することがないため、それによる煩わしさを回避することができる。
【0056】
また、追い越しボタン28が押下された場合において、自車両32から前方車両30までの距離X1が所定距離以内であるが(ステップS102、YES)、自車両32から所定距離以内に追い越し車線38が無いときには(ステップS103、NO)、制御手段14は、通信手段24を介して前方車両30に追い越し通知を送信する(ステップS106)。後方の自車両32から追い越し通知を受信した前方車両30は、後方の自車両32が追い越しの意思表示を行っていることをナビゲーションシステムの表示手段及び/又はスピーカを用いてドライバに報知することにより、例えば、減速し、あるいは、路肩に車両を寄せる等の動作を促して追い越しを容易に行わせることができる。また、前方車両30は、送信された追い越し通知に基づき、後方の自車両32が追い越しの意思表示を行っていることを認識し、追い越す車両に注意することができる。
【0057】
なお、前方車両30までの距離X1及び追い越し車線38までの距離X2に従って所定の追い越し通知を行うのに加え、対向車線36を走行して接近する対向車両40までの距離X3を測定し、この距離X3を条件に加えて適切な追い越しのための通知を行うようにしてもよい。
【0058】
例えば、対向車両40までの距離X3が所定距離以上離れている場合には、ゆとりを持って前方車両30を追い越すことができるため、前方車両30が所定距離以内であり、且つ、追い越し車線38が所定距離以内にある場合であっても、前方車両30に対して追い越し通知を送信し、後方の自車両32が追い越す意思があることを認識させ、迅速に追い越し動作を行わせることができる。また、自車両32から対向車両40までの距離X3が所定距離以内の場合には、危険であるため、追い越しをかけないよう、前方車両30への追い越し通知信号の送信を禁止し、追い越し車線38の案内を優先させるようにすることが望ましい。
【0059】
この場合、距離X3は、前方車両30までの距離X1を測定する場合と同様に、距離測定手段20を用いて対向車両40までの距離X3を直接測定して得ることが可能である。また、車両位置情報取得手段21を用いて、対向車両40との間で無線通信により位置情報を取得し、あるいは、交通情報配信システムから対向車両40の位置情報を取得することもできる。
【0060】
なお、本発明は、上述した実施例に限定されるものではなく、本発明の要旨を逸脱しない範囲で変更することが可能である。
【0061】
例えば、特定車線として、登坂車線又は譲り車線が接近していることを自車両32のドライバに案内し、前方車両30への追い越し通知の送信を禁止することにより、前方車両30が登坂車線又は譲り車線に移動するまで、追い越し処理を抑制するようにしてもよい。
【0062】
また、ドライバが追い越しボタン28を押下して前方車両30の追い越しの意思表示を行ったとき、前方車両30が自車両32から所定距離以内にない場合であっても、自車両32から所定距離以内に追い越し車線38、登坂車線又は譲り車線がある場合には、自車両32のドライバにこれらの車線が接近していることを案内する一方、前方車両30に対する追い越し通知信号の送信を禁止することにより、無理な追い越し動作を抑制して、走行の安全を図ることが可能となる。
【0063】
また、上述した実施例では、自車両32の走行方向と同じ方向に走行する前方車両30に対して追い越し通知を送信するものとして説明したが、対向車線36を接近してくる対向車両40に対しても、追い越し通知を送信するものであってもよい。
【0064】
さらに、追い越し車線38の案内、追い越し通知の送信又は禁止を判定するための各距離X1、X2、X3は、前方車両30、自車両32及び対向車両40の移動速度の関数からなる変数として設定することもできる。
【符号の説明】
【0065】
10・・・ナビゲーションシステム
13・・・制御手段
14・・・CPU
15・・・ROM
16・・・RAM
17・・・現在位置検出手段
18・・・経路探索手段
19・・・地図情報記憶手段
20・・・距離測定手段
21・・・車両位置情報取得手段
24・・・通信手段
25・・・入力手段
26・・・表示手段
27・・・スピーカ
28・・・追い越しボタン
30・・・前方車両
32・・・自車両
34・・・本線
36・・・対向車線
38・・・追い越し車線
40・・・対向車両
【特許請求の範囲】
【請求項1】
自車両の現在位置を検出する現在位置検出手段と、地図情報を記憶する地図情報記憶手段と、前記現在位置及び前記地図情報に基づき、追い越し車線、登坂車線又は譲り車線である特定車線が自車両の走行方向前方の所定距離以内に接近したことを検出する特定車線接近検出手段と、自車両に対して前記特定車線を案内する特定車線案内手段と、自車両の走行方向前方に存在する他車両に追い越し通知を行う追い越し通知手段と、を備えるナビゲーションシステムにおいて、
前記特定車線接近検出手段が前記特定車線への接近を検出したとき、前記特定車線案内手段に前記特定車線を案内させる制御を行う一方、前記追い越し通知手段による前記他車両への追い越し通知を禁止する制御を行う制御手段を備えることを特徴とするナビゲーションシステム。
【請求項2】
自車両の走行方向前方に存在する他車両の位置情報を取得する車両位置情報取得手段を備え、
前記制御手段は、前記車線接近検出手段が前記特定車線への接近を検出し、且つ、前記車両位置情報取得手段により取得した前記他車両の位置情報に基づく自車両から前記他車両までの距離が所定距離以内であるとき、前記車線案内手段に前記特定車線を案内させる制御を行う一方、前記追い越し通知手段による前記他車両への追い越し通知を禁止する制御を行うことを特徴とする請求項1記載のナビゲーションシステム。
【請求項3】
前記車両位置情報取得手段は、前記他車両までの距離を測定する距離測定手段により構成されることを特徴とする請求項2記載のナビゲーションシステム。
【請求項4】
前記他車両は、自車両に向かって前方から走行して来る対向車線の車両を含むことを特徴とする請求項2記載のナビゲーションシステム。
【請求項5】
目的地を設定する目的地設定手段と、
前記地図情報に基づき、自車両の現在位置又は任意の出発地から前記目的地までの経路を探索する経路探索手段と、を備え、
前記特定車線接近検出手段は、前記経路上における前記特定車線への接近を検出することを特徴とする請求項1〜4のいずれか1項に記載のナビゲーションシステム。
【請求項1】
自車両の現在位置を検出する現在位置検出手段と、地図情報を記憶する地図情報記憶手段と、前記現在位置及び前記地図情報に基づき、追い越し車線、登坂車線又は譲り車線である特定車線が自車両の走行方向前方の所定距離以内に接近したことを検出する特定車線接近検出手段と、自車両に対して前記特定車線を案内する特定車線案内手段と、自車両の走行方向前方に存在する他車両に追い越し通知を行う追い越し通知手段と、を備えるナビゲーションシステムにおいて、
前記特定車線接近検出手段が前記特定車線への接近を検出したとき、前記特定車線案内手段に前記特定車線を案内させる制御を行う一方、前記追い越し通知手段による前記他車両への追い越し通知を禁止する制御を行う制御手段を備えることを特徴とするナビゲーションシステム。
【請求項2】
自車両の走行方向前方に存在する他車両の位置情報を取得する車両位置情報取得手段を備え、
前記制御手段は、前記車線接近検出手段が前記特定車線への接近を検出し、且つ、前記車両位置情報取得手段により取得した前記他車両の位置情報に基づく自車両から前記他車両までの距離が所定距離以内であるとき、前記車線案内手段に前記特定車線を案内させる制御を行う一方、前記追い越し通知手段による前記他車両への追い越し通知を禁止する制御を行うことを特徴とする請求項1記載のナビゲーションシステム。
【請求項3】
前記車両位置情報取得手段は、前記他車両までの距離を測定する距離測定手段により構成されることを特徴とする請求項2記載のナビゲーションシステム。
【請求項4】
前記他車両は、自車両に向かって前方から走行して来る対向車線の車両を含むことを特徴とする請求項2記載のナビゲーションシステム。
【請求項5】
目的地を設定する目的地設定手段と、
前記地図情報に基づき、自車両の現在位置又は任意の出発地から前記目的地までの経路を探索する経路探索手段と、を備え、
前記特定車線接近検出手段は、前記経路上における前記特定車線への接近を検出することを特徴とする請求項1〜4のいずれか1項に記載のナビゲーションシステム。
【図1】


【図2】
【図3】

【図2】
【図3】
【公開番号】特開2011−247741(P2011−247741A)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願番号】特願2010−121104(P2010−121104)
【出願日】平成22年5月27日(2010.5.27)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願日】平成22年5月27日(2010.5.27)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
[ Back to top ]