
ナビゲーションセンタ
【課題】ナビゲーションセンタで経路探索するナビゲーションシステムにおいて、ナビゲーションセンタとナビゲーション装置との間で記憶している地図データが異なる場合であっても、ナビゲーション装置側で正しく経路案内できるようにする。
【解決手段】ナビゲーションセンタ1は、ナビゲーション装置21を搭載する車両2の位置情報をプローブ情報として受信し、受信した車両2の位置情報に基づいて位置情報の関数近似を行う。得られた近似関数に対応するリンクをナビゲーションセンタ1に記憶される地図データの中から選択し、そのリンクに対応させた場合の形状を算出する。そして、予めナビゲーションセンタ1で予め算出されたリンクの形状関数と、近似関数との差分を算出し、その差分に基づいてナビゲーションセンタ1が探索する経路を補正する。そして、補正した経路の点列を算出し、ナビゲーション装置21へ送信する。
【解決手段】ナビゲーションセンタ1は、ナビゲーション装置21を搭載する車両2の位置情報をプローブ情報として受信し、受信した車両2の位置情報に基づいて位置情報の関数近似を行う。得られた近似関数に対応するリンクをナビゲーションセンタ1に記憶される地図データの中から選択し、そのリンクに対応させた場合の形状を算出する。そして、予めナビゲーションセンタ1で予め算出されたリンクの形状関数と、近似関数との差分を算出し、その差分に基づいてナビゲーションセンタ1が探索する経路を補正する。そして、補正した経路の点列を算出し、ナビゲーション装置21へ送信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、経路を探索することができるナビゲーションセンタに関する。
【背景技術】
【0002】
ナビゲーション装置とナビゲーションセンタとからなるナビゲーションシステムにおいて、出発地から目的地までの経路をナビゲーションセンタにて探索し、ナビゲーション装置で経路案内を行うナビゲーションシステムが提案されている。(たとえば、特許文献1)
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−125429号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のようなナビゲーションシステムにおいて、ナビゲーションセンタとナビゲーション装置との間で記憶している地図データが異なる場合、ナビゲーション装置側での経路案内が正しく行えないという問題があった。
【課題を解決するための手段】
【0005】
本発明は、車両に搭載されるナビゲーション装置からの要請で出発地から目的地までの案内用経路を探索するナビゲーションセンタに適用され、車両の走行軌跡を少なくとも含むプローブ情報をナビゲーション装置から受信するプローブ情報受信手段と、プローブ情報受信手段により受信したプローブ情報を記憶するプローブ情報記憶手段と、リンクの始点および終点の位置情報を含む地図情報を記憶する地図情報記憶手段と、地図情報に記憶されるリンクを描画するための形状関数を記憶する形状関数記憶手段と、プローブ情報記憶手段に記憶されたプローブ情報に含まれる車両の走行軌跡に基づいて、車両の走行軌跡に対応する近似関数を算出する近似関数算出手段と、近似関数算出手段により算出された近似関数と、形状関数記憶手段に記憶された形状関数との差分を算出する差分算出手段と、出発地から目的地までの経路を探索する経路探索手段と、経路に含まれるリンクの形状関数を差分算出手段により算出された差分に基づいて補正する形状補正手段と、形状補正手段により補正された形状関数に基づいた経路の形状を案内用経路の形状としてナビゲーション装置へ送信する案内用経路形状送信手段とを備えることを特徴とする。
【発明の効果】
【0006】
ナビゲーション装置とナビゲーションセンタとの間で記憶している地図データが互いに異なる場合であっても正しく経路案内できる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態に係るナビゲーションセンタを備えるナビゲーションシステムの全体構成を示すブロック図である。
【図2】本発明の一実施形態に係るナビゲーションセンタの機能ブロック図の一例である。
【図3】位置情報の関数近似を説明するための図である。
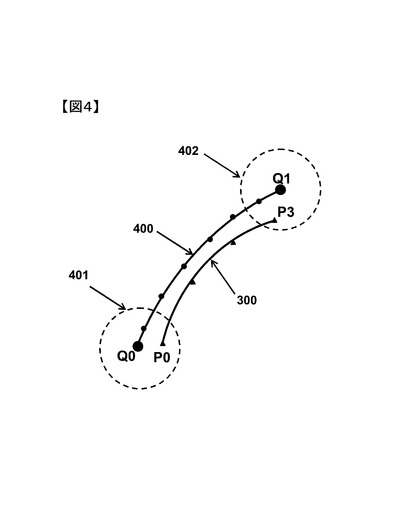
【図4】近似関数を算出された推定形状に対応するリンクの選択方法を説明するための図である。
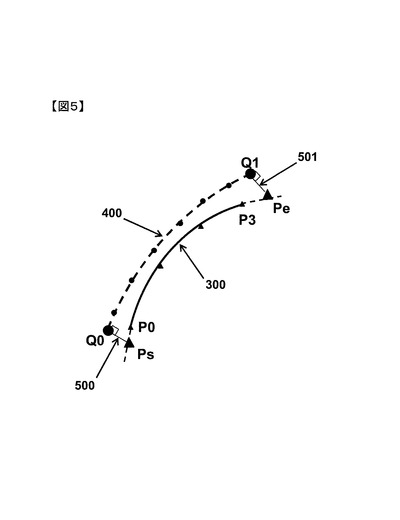
【図5】選択されたリンクの始点および終点に対応する点を再指定する方法を説明するための図である。
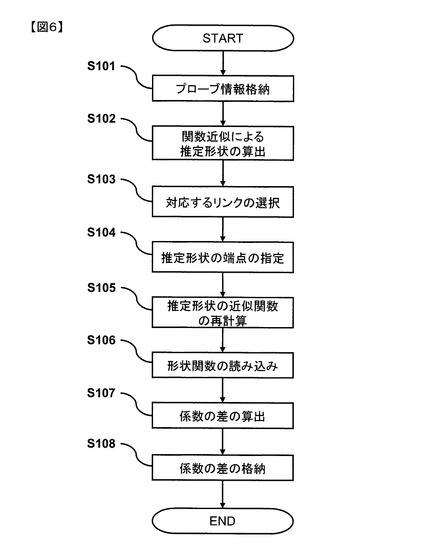
【図6】リンク形状推定部と差分抽出部とが行う処理に関するフローチャートの一例である。
【図7】経路探索部と経路補間部とが行う処理に関するフローチャートの一例である。
【発明を実施するための形態】
【0008】
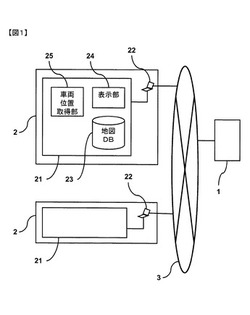
図1は、本発明の一実施形態に係るナビゲーションセンタを備えるナビゲーションシステムの全体構成を示した図である。図1のナビゲーションシステムは、ナビゲーションセンタ1と、複数台の車両2にそれぞれ搭載されたナビゲーション装置21とを備える。ナビゲーションセンタ1と複数のナビゲーション装置21とは、インターネット回線や携帯電話網などの通信回線網3を介して接続されている。複数のナビゲーション装置21は、携帯電話やPDAなどの通信端末22を介して通信回線網3に接続し、プローブ情報をナビゲーションセンタ1に送信する。
【0009】
複数の車両2にそれぞれ搭載されるナビゲーション装置21は、経路案内等に用いる地図データを記憶する地図DB23と、経路案内時に経路を表示モニタ等に表示する表示部24と、GPS信号などに基づいて車両2の位置情報を作成する車両位置取得部25とを少なくとも備える。ナビゲーション装置21は、通信端末22を介してプローブ情報を所定時間ごとに送信している。プローブ情報には、前回プローブ情報を送信してから所定時間経過するまでの間の車両2の位置情報(緯度経度など)の履歴と、地図DB23に記憶されている地図データの種類に関する情報とが含まれる。また、ナビゲーション装置21がナビゲーションセンタ1へ経路探索を依頼するときは、プローブ情報にナビゲーションセンタ1に探索させる経路の出発地および目的地がさらに含まれる。
【0010】
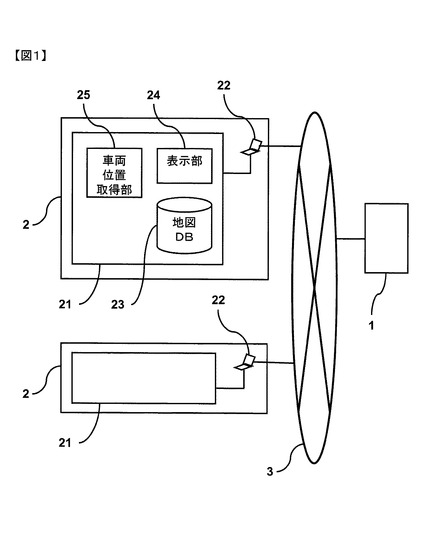
図2はナビゲーションセンタ1の機能ブロック図である。ナビゲーションセンタ1は、不図示のCPU、メモリ装置、ハードディスク装置などを備えるコンピュータを備える。ナビゲーションセンタ1は、通信処理部11と、リンク形状推定部12と、差分抽出部13と、経路探索部14と、経路補間部15と、プローブDB16と、地図DB17と、リンク関数DB18と、差分係数DB19とを有する。リンク形状推定部12は、その中に関数近似部121を有する。
【0011】
通信処理部11は、通信回線網3を介してナビゲーション装置21と通信する。通信処理部11は、ナビゲーション装置21が送信したプローブ情報を受信し、リンク形状推定部12へ送信する。また、通信処理部11は、経路補間部15の出力情報(後述)をナビゲーション装置21へ送信する。
【0012】
リンク形状推定部12は、車両2の走行軌跡を基に、車両2が走行した道路をナビゲーション装置21の地図DB23に記憶された地図データで表現したときのリンク形状を推定する。ナビゲーションセンタ1の地図DB17に記憶される地図データと、ナビゲーション装置21の地図DB23に記憶される地図データとは必ずしも一致しないためこのような処理を行う。まずリンク形状推定部12は、通信処理部11から入力されたプローブ情報をプローブDB16へ記憶する。また、リンク形状推定部12は、プローブDB16に記憶したプローブ情報から車両2の位置情報の履歴を読み出し、関数近似部121を用いてその位置情報の履歴に対する近似関数を算出し、車両2が走行した道路の推定形状を描く。そして、リンク形状推定部12は、地図DB17に含まれるリンクの中からリンクの始点と終点の近傍に道路の推定形状の端点があるリンクを選択する。さらに、リンク形状推定部12は、選択したリンクの始点と終点に基づいて道路の推定形状の端点を再指定し、再指定した端点に基づいて関数近似部121を用いて所望のリンク形状を表す近似関数を再計算する。この再計算した後の近似関数を推定形状関数と称する。リンク形状推定部12は、推定形状関数と、地図DB17から選択したリンクと、プローブ情報に含まれる地図データの種類に関する情報とを差分抽出部13に入力する。
【0013】
差分抽出部13は、リンク形状推定部12が地図DB17から選択したリンクについて、リンクの形状を表す形状関数をリンク関数DB18から読み出す。推定形状関数と形状関数とは共に下式(1)の近似関数で表され、共通の次数Nを有し、係数Ak(kは0から次数Nまでの整数)の値がそれぞれ異なる。差分抽出部13は、形状関数の係数Akと、リンク形状推定部12により算出された推定形状関数の係数Akとの差を各kごとに算出する。差分抽出部13は、算出した各係数Akの差を、プローブ情報に含まれる地図データの種類に関する情報とともに差分係数DB19へ記憶する。
【0014】
【数1】

…式(1)
【0015】
経路探索部14は、出発地と目的地に関する情報を含むプローブ情報がプローブDB16に記憶されると、その出発地と目的地に関する情報と、地図DB17に記憶される地図データとに基づいて、ダイクストラ法などの公知な方法により出発地から目的地までの経路探索を行う。経路探索部14は、探索した経路を表すリンク列と、プローブ情報に含まれる地図データの種類に関する情報とを経路補間部15へ出力する。
【0016】
経路補間部15は、経路探索部14から入力された経路を表すリンク列に含まれるリンクの形状関数をリンク関数DB18から読み出す。次に、経路補間部15は、プローブ情報に含まれる地図データの種類に関する情報に基づいて、差分係数DB19から差分抽出部13が算出した係数Akの差を読み出す。そして、経路補間部15は、差分係数DB19から読み出した係数Akの差を適用した各リンクの形状関数で描かれるリンク形状を、経路探索部14から入力された経路を表すリンク列に含まれるリンクの順番に基づいて接続し、経路の形状描画用の点列を算出する。
【0017】
プローブDB16には、通信処理部11で受信したプローブ情報が記憶される。地図DB17には地図データが記憶され、リンク関数DB18には地図DB17に記憶される地図データの各リンクの形状を表す形状関数が記憶されている。各形状関数は、地図DB17に記憶されている地図データに基づいて、予めオフラインで算出されている。差分係数DB19には、各地図データの種類ごとの係数Akの差が記憶されている。
【0018】
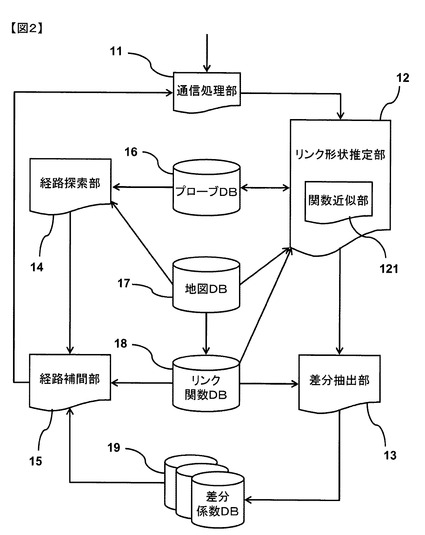
関数近似部121の動作について、図3を用いて説明する。関数近似部121は、入力された複数の位置情報の中から関数近似誤差が所定値を超えない位置情報のグループを特定し、そのときの近似関数を出力する。関数近似部121は、プローブ情報から車両2が一定時間ごとに連続して記録した位置情報を読み出し、リンク形状推定部12が再指定した推定形状の端点があればそれらも読み出す。図3の例では、位置P0から位置P10が読み出されている。関数近似部121は、これらの中から起点とする位置を決定する。たとえば、プローブ情報に含まれる位置情報の中で記録日時が最も古いものや、リンク形状推定部12が再指定した推定形状の始点を起点として指定する。図3の例では、位置P0を起点とするものとする。関数近似部121は、位置P0から順番に記録日時等が古い順に位置P10まで読み込み、位置を一つ読み込むたびに最小二乗法やスプライン法などの方法により上式(1)のような近似関数を算出し、さらに関数近似誤差を算出する。たとえば、最小二乗法で関数近似を行った場合は、関数近似誤差として最小二乗法における残差の二乗和を算出する。対応位置算出処理部12は、関数近似誤差が所定値以下である場合は算出した近似関数と、近似関数に対応する位置情報と、近似関数で推定形状を描画するための上式(1)の引数xの範囲とをナビゲーションセンタ1のメモリ装置等に記憶し、関数近似誤差が所定値を超える場合は新たにその位置を起点として関数近似を開始する。図3の例では、位置P0を起点とした関数近似において関数近似誤差が位置P4で所定値を超えている。そのため、位置P0からP3までの位置情報に基づいて算出された近似関数と、位置P0からP3までの位置情報と、推定形状300を描画するための引数xの範囲とをナビゲーションセンタ1のメモリ装置に記憶する。図3の例では、推定形状300の両端点は位置P0と位置P3とに一致している。なお、位置P5以降についても同様の処理が行われ、近似関数等がメモリ装置に記憶される。
【0019】
図4を用いて、リンク形状推定部12が行う処理のうち、地図DB17に含まれるリンクの中からリンクの始点と終点の近傍に推定形状の端点があるリンクを選択する処理について説明する。地図DB17に記憶されている地図データには、各リンクの始点と終点の情報が含まれている。リンク形状推定部12は、地図DB17に記憶されている各リンクの始点と終点について、所定の距離の範囲内に推定形状の端点があるか否かを判定する。図4の例では、図3で関数近似部121により近似関数等の情報が記憶された推定形状300について処理を行っており、地図DB17に記憶されるリンク400について判定が行われている。リンク400の始点は位置Q0、終点は位置Q1である。リンク形状推定部12は、まず始点の位置Q0から所定の距離の範囲401の内側に推定形状300の端点があるか否かを判定し、次に終点の位置Q1から所定の距離の範囲402の内側に推定形状の端点があるか否かを判定する。図4の例では、推定形状300の両端点であるP0とP3とがそれぞれ範囲401と範囲402との間に存在すると判定される。リンク形状推定部12は、推定形状の両端点が所定の距離の範囲内にあると判定されたリンクを、その推定形状に対応したリンクとして選択する。推定形状300に対してはリンク400が選択される。
【0020】
図5を用いて、リンク形状推定部12が行う処理のうち、選択したリンクの始点と終点に基づいて推定形状の端点を再指定する処理について説明する。リンク形状推定部12は、選択されたリンク(たとえば、リンク400)の始点および終点から法線を延ばし、推定形状を表す近似関数の線との交点を算出する。図5の例では、始点Q0と終点Q1からそれぞれ法線500と、法線501とが延ばされており、推定形状300の近似関数の線との交点Psと交点Peとが得られている。リンク形状推定部12は、これらの交点を推定形状300の新たな端点として再指定する。
【0021】
図6は、リンク形状推定部12と差分抽出部13とが行う処理の一例を示すフローチャートである。ステップS101では、通信処理部11が受信したプローブ情報を、リンク形状推定部12がプローブDB16へ記憶し、経路探索部14へもプローブ情報を出力する。ステップS102では、ステップS101でプローブDB16に記憶したプローブ情報から車両2の位置情報の履歴を読み出し、関数近似部121を用いてその位置情報の履歴に対する近似関数を算出し、車両2が走行した道路の推定形状を算出する。
【0022】
ステップS103では、図4のように地図DB17に含まれるリンクの中からリンクの始点と終点の近傍にステップS102で算出した推定形状の端点があるリンクを選択する。ステップS104では、図5のようにステップS103で選択したリンクの始点および終点の位置に基づいて、推定形状の端点を再指定する。ステップS105では、再指定された端点と、ステップS102で推定形状を算出したときの位置情報とを用いて関数近似部121が近似関数を再計算する。
【0023】
ステップS106では、差分抽出部13は、ステップS103で選択したリンクの形状関数をリンク関数DB18から読み込む。ステップS107では、差分抽出部13は、ステップS106で選択した形状関数と、ステップS105で再計算した近似関数との間の係数Akの差を算出する。ステップS108では、差分抽出部13は、ステップS107で算出した係数Akの差を差分係数DB19へ記憶する。
【0024】
図7は、経路探索部14と経路補間部15とが行う処理を表すフローチャートの一例である。ステップS201では、プローブDB16に記憶されるプローブ情報に含まれる出発地と目的地の情報に基づいて、経路探索を行う。ステップS202では、経路補間部15は、経路探索された経路に含まれるリンクについて、リンクの形状関数を地図関数DB18から読み出す。ステップS203では、経路補間部15は、差分関数DB19から係数Akの差を読み出す。ステップS204では、経路補間部15は、ステップS202で読み出した形状関数をステップS203で読み出した係数Akの差で補正する。ステップS205では、経路補間部15は、補正後の形状関数を接続し、経路の形状を作成する。ステップS206では、経路補間部15は、ステップS205で作成した経路の形状から形状描画用の点列を算出する。ステップS207では、経路補間部15は、ステップS206で算出した形状描画用の点列を、通信処理部11を介してナビゲーション装置21へ送信する。
【0025】
以上説明した各実施の形態によれば、次の作用効果を奏する。
本実施の形態のナビゲーションセンタは、車両2に搭載されるナビゲーション装置21からプローブ情報が送信されてきたときに通信処理部11が受信し、リンク形状推定部12へプローブ情報を出力し、リンク形状推定部12はそのプローブ情報をプローブDB16へ記憶する(ステップS101)。地図DB17はリンクの始点および終点の位置情報を含む地図データを記憶し、リンク関数DB18は地図情報に記憶されるリンクを描画するための形状関数を記憶している。リンク形状推定部12は、プローブ情報に含まれる車両の位置情報に対して関数近似部121を用いて近似関数を算出し推定形状を算出し(ステップS102)、地図DB17の地図データの中から対応するリンクを選択し(ステップS103)、選択したリンクの始点と終点とに対応する近似関数の線上に指定し(ステップS104)、関数近似部121を用いて近似関数を再計算する(ステップS105)。そして、差分抽出部13は、再計算した近似関数とリンク関数DB18に記憶されたリンクの形状関数との間で係数Akの差を算出する(ステップS106およびステップS107)。一方、経路探索部14は、出発地から目的地までの経路を探索し(ステップS201)、経路に含まれるリンクの形状関数をリンク関数DB18から読み込み(ステップS202)、その形状関数に係数Akの差を適用し経路の形状を補正し(ステップS203およびステップS204)、経路の形状を描画するための点列をナビゲーション装置21へ送信する(ステップS206およびステップS207)。このようにすることにより、ナビゲーション装置とナビゲーションセンタとの間で記憶している地図データが互いに異なる場合であっても正しく経路案内できる。
【0026】
以上の実施の形態は、以下のように変形して実施できる。
〔1〕上記の実施の形態では、リンク形状推定部12は、関数近似部121を利用して近似関数を2度計算したが、2度目の近似関数の算出は省略してもよい。差分抽出部13は、1度目の近似関数と、リンクの形状関数との比較を行ってもよい。
【0027】
〔2〕上記の実施の形態では、リンク形状推定部12は、近似関数に対応するリンクを選択するとき、リンク列を選択してもよい。この場合、リンク列の始点および終点から所定の距離の範囲に推定形状の両端があるか否かを判定すればよい。
【0028】
以上で説明した各実施の形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されない。
【符号の説明】
【0029】
1 ナビゲーションセンタ
2 車両
11 通信処理部
12 リンク形状推定部
13 差分抽出部
14 経路探索部
15 経路補間部
16 プローブDB
17、23 地図DB
18 リンク関数DB
19 差分係数DB
21 ナビゲーション装置
22 通信端末
24 表示部
25 車両位置取得部
【技術分野】
【0001】
本発明は、経路を探索することができるナビゲーションセンタに関する。
【背景技術】
【0002】
ナビゲーション装置とナビゲーションセンタとからなるナビゲーションシステムにおいて、出発地から目的地までの経路をナビゲーションセンタにて探索し、ナビゲーション装置で経路案内を行うナビゲーションシステムが提案されている。(たとえば、特許文献1)
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−125429号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のようなナビゲーションシステムにおいて、ナビゲーションセンタとナビゲーション装置との間で記憶している地図データが異なる場合、ナビゲーション装置側での経路案内が正しく行えないという問題があった。
【課題を解決するための手段】
【0005】
本発明は、車両に搭載されるナビゲーション装置からの要請で出発地から目的地までの案内用経路を探索するナビゲーションセンタに適用され、車両の走行軌跡を少なくとも含むプローブ情報をナビゲーション装置から受信するプローブ情報受信手段と、プローブ情報受信手段により受信したプローブ情報を記憶するプローブ情報記憶手段と、リンクの始点および終点の位置情報を含む地図情報を記憶する地図情報記憶手段と、地図情報に記憶されるリンクを描画するための形状関数を記憶する形状関数記憶手段と、プローブ情報記憶手段に記憶されたプローブ情報に含まれる車両の走行軌跡に基づいて、車両の走行軌跡に対応する近似関数を算出する近似関数算出手段と、近似関数算出手段により算出された近似関数と、形状関数記憶手段に記憶された形状関数との差分を算出する差分算出手段と、出発地から目的地までの経路を探索する経路探索手段と、経路に含まれるリンクの形状関数を差分算出手段により算出された差分に基づいて補正する形状補正手段と、形状補正手段により補正された形状関数に基づいた経路の形状を案内用経路の形状としてナビゲーション装置へ送信する案内用経路形状送信手段とを備えることを特徴とする。
【発明の効果】
【0006】
ナビゲーション装置とナビゲーションセンタとの間で記憶している地図データが互いに異なる場合であっても正しく経路案内できる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態に係るナビゲーションセンタを備えるナビゲーションシステムの全体構成を示すブロック図である。
【図2】本発明の一実施形態に係るナビゲーションセンタの機能ブロック図の一例である。
【図3】位置情報の関数近似を説明するための図である。
【図4】近似関数を算出された推定形状に対応するリンクの選択方法を説明するための図である。
【図5】選択されたリンクの始点および終点に対応する点を再指定する方法を説明するための図である。
【図6】リンク形状推定部と差分抽出部とが行う処理に関するフローチャートの一例である。
【図7】経路探索部と経路補間部とが行う処理に関するフローチャートの一例である。
【発明を実施するための形態】
【0008】
図1は、本発明の一実施形態に係るナビゲーションセンタを備えるナビゲーションシステムの全体構成を示した図である。図1のナビゲーションシステムは、ナビゲーションセンタ1と、複数台の車両2にそれぞれ搭載されたナビゲーション装置21とを備える。ナビゲーションセンタ1と複数のナビゲーション装置21とは、インターネット回線や携帯電話網などの通信回線網3を介して接続されている。複数のナビゲーション装置21は、携帯電話やPDAなどの通信端末22を介して通信回線網3に接続し、プローブ情報をナビゲーションセンタ1に送信する。
【0009】
複数の車両2にそれぞれ搭載されるナビゲーション装置21は、経路案内等に用いる地図データを記憶する地図DB23と、経路案内時に経路を表示モニタ等に表示する表示部24と、GPS信号などに基づいて車両2の位置情報を作成する車両位置取得部25とを少なくとも備える。ナビゲーション装置21は、通信端末22を介してプローブ情報を所定時間ごとに送信している。プローブ情報には、前回プローブ情報を送信してから所定時間経過するまでの間の車両2の位置情報(緯度経度など)の履歴と、地図DB23に記憶されている地図データの種類に関する情報とが含まれる。また、ナビゲーション装置21がナビゲーションセンタ1へ経路探索を依頼するときは、プローブ情報にナビゲーションセンタ1に探索させる経路の出発地および目的地がさらに含まれる。
【0010】
図2はナビゲーションセンタ1の機能ブロック図である。ナビゲーションセンタ1は、不図示のCPU、メモリ装置、ハードディスク装置などを備えるコンピュータを備える。ナビゲーションセンタ1は、通信処理部11と、リンク形状推定部12と、差分抽出部13と、経路探索部14と、経路補間部15と、プローブDB16と、地図DB17と、リンク関数DB18と、差分係数DB19とを有する。リンク形状推定部12は、その中に関数近似部121を有する。
【0011】
通信処理部11は、通信回線網3を介してナビゲーション装置21と通信する。通信処理部11は、ナビゲーション装置21が送信したプローブ情報を受信し、リンク形状推定部12へ送信する。また、通信処理部11は、経路補間部15の出力情報(後述)をナビゲーション装置21へ送信する。
【0012】
リンク形状推定部12は、車両2の走行軌跡を基に、車両2が走行した道路をナビゲーション装置21の地図DB23に記憶された地図データで表現したときのリンク形状を推定する。ナビゲーションセンタ1の地図DB17に記憶される地図データと、ナビゲーション装置21の地図DB23に記憶される地図データとは必ずしも一致しないためこのような処理を行う。まずリンク形状推定部12は、通信処理部11から入力されたプローブ情報をプローブDB16へ記憶する。また、リンク形状推定部12は、プローブDB16に記憶したプローブ情報から車両2の位置情報の履歴を読み出し、関数近似部121を用いてその位置情報の履歴に対する近似関数を算出し、車両2が走行した道路の推定形状を描く。そして、リンク形状推定部12は、地図DB17に含まれるリンクの中からリンクの始点と終点の近傍に道路の推定形状の端点があるリンクを選択する。さらに、リンク形状推定部12は、選択したリンクの始点と終点に基づいて道路の推定形状の端点を再指定し、再指定した端点に基づいて関数近似部121を用いて所望のリンク形状を表す近似関数を再計算する。この再計算した後の近似関数を推定形状関数と称する。リンク形状推定部12は、推定形状関数と、地図DB17から選択したリンクと、プローブ情報に含まれる地図データの種類に関する情報とを差分抽出部13に入力する。
【0013】
差分抽出部13は、リンク形状推定部12が地図DB17から選択したリンクについて、リンクの形状を表す形状関数をリンク関数DB18から読み出す。推定形状関数と形状関数とは共に下式(1)の近似関数で表され、共通の次数Nを有し、係数Ak(kは0から次数Nまでの整数)の値がそれぞれ異なる。差分抽出部13は、形状関数の係数Akと、リンク形状推定部12により算出された推定形状関数の係数Akとの差を各kごとに算出する。差分抽出部13は、算出した各係数Akの差を、プローブ情報に含まれる地図データの種類に関する情報とともに差分係数DB19へ記憶する。
【0014】
【数1】
…式(1)
【0015】
経路探索部14は、出発地と目的地に関する情報を含むプローブ情報がプローブDB16に記憶されると、その出発地と目的地に関する情報と、地図DB17に記憶される地図データとに基づいて、ダイクストラ法などの公知な方法により出発地から目的地までの経路探索を行う。経路探索部14は、探索した経路を表すリンク列と、プローブ情報に含まれる地図データの種類に関する情報とを経路補間部15へ出力する。
【0016】
経路補間部15は、経路探索部14から入力された経路を表すリンク列に含まれるリンクの形状関数をリンク関数DB18から読み出す。次に、経路補間部15は、プローブ情報に含まれる地図データの種類に関する情報に基づいて、差分係数DB19から差分抽出部13が算出した係数Akの差を読み出す。そして、経路補間部15は、差分係数DB19から読み出した係数Akの差を適用した各リンクの形状関数で描かれるリンク形状を、経路探索部14から入力された経路を表すリンク列に含まれるリンクの順番に基づいて接続し、経路の形状描画用の点列を算出する。
【0017】
プローブDB16には、通信処理部11で受信したプローブ情報が記憶される。地図DB17には地図データが記憶され、リンク関数DB18には地図DB17に記憶される地図データの各リンクの形状を表す形状関数が記憶されている。各形状関数は、地図DB17に記憶されている地図データに基づいて、予めオフラインで算出されている。差分係数DB19には、各地図データの種類ごとの係数Akの差が記憶されている。
【0018】
関数近似部121の動作について、図3を用いて説明する。関数近似部121は、入力された複数の位置情報の中から関数近似誤差が所定値を超えない位置情報のグループを特定し、そのときの近似関数を出力する。関数近似部121は、プローブ情報から車両2が一定時間ごとに連続して記録した位置情報を読み出し、リンク形状推定部12が再指定した推定形状の端点があればそれらも読み出す。図3の例では、位置P0から位置P10が読み出されている。関数近似部121は、これらの中から起点とする位置を決定する。たとえば、プローブ情報に含まれる位置情報の中で記録日時が最も古いものや、リンク形状推定部12が再指定した推定形状の始点を起点として指定する。図3の例では、位置P0を起点とするものとする。関数近似部121は、位置P0から順番に記録日時等が古い順に位置P10まで読み込み、位置を一つ読み込むたびに最小二乗法やスプライン法などの方法により上式(1)のような近似関数を算出し、さらに関数近似誤差を算出する。たとえば、最小二乗法で関数近似を行った場合は、関数近似誤差として最小二乗法における残差の二乗和を算出する。対応位置算出処理部12は、関数近似誤差が所定値以下である場合は算出した近似関数と、近似関数に対応する位置情報と、近似関数で推定形状を描画するための上式(1)の引数xの範囲とをナビゲーションセンタ1のメモリ装置等に記憶し、関数近似誤差が所定値を超える場合は新たにその位置を起点として関数近似を開始する。図3の例では、位置P0を起点とした関数近似において関数近似誤差が位置P4で所定値を超えている。そのため、位置P0からP3までの位置情報に基づいて算出された近似関数と、位置P0からP3までの位置情報と、推定形状300を描画するための引数xの範囲とをナビゲーションセンタ1のメモリ装置に記憶する。図3の例では、推定形状300の両端点は位置P0と位置P3とに一致している。なお、位置P5以降についても同様の処理が行われ、近似関数等がメモリ装置に記憶される。
【0019】
図4を用いて、リンク形状推定部12が行う処理のうち、地図DB17に含まれるリンクの中からリンクの始点と終点の近傍に推定形状の端点があるリンクを選択する処理について説明する。地図DB17に記憶されている地図データには、各リンクの始点と終点の情報が含まれている。リンク形状推定部12は、地図DB17に記憶されている各リンクの始点と終点について、所定の距離の範囲内に推定形状の端点があるか否かを判定する。図4の例では、図3で関数近似部121により近似関数等の情報が記憶された推定形状300について処理を行っており、地図DB17に記憶されるリンク400について判定が行われている。リンク400の始点は位置Q0、終点は位置Q1である。リンク形状推定部12は、まず始点の位置Q0から所定の距離の範囲401の内側に推定形状300の端点があるか否かを判定し、次に終点の位置Q1から所定の距離の範囲402の内側に推定形状の端点があるか否かを判定する。図4の例では、推定形状300の両端点であるP0とP3とがそれぞれ範囲401と範囲402との間に存在すると判定される。リンク形状推定部12は、推定形状の両端点が所定の距離の範囲内にあると判定されたリンクを、その推定形状に対応したリンクとして選択する。推定形状300に対してはリンク400が選択される。
【0020】
図5を用いて、リンク形状推定部12が行う処理のうち、選択したリンクの始点と終点に基づいて推定形状の端点を再指定する処理について説明する。リンク形状推定部12は、選択されたリンク(たとえば、リンク400)の始点および終点から法線を延ばし、推定形状を表す近似関数の線との交点を算出する。図5の例では、始点Q0と終点Q1からそれぞれ法線500と、法線501とが延ばされており、推定形状300の近似関数の線との交点Psと交点Peとが得られている。リンク形状推定部12は、これらの交点を推定形状300の新たな端点として再指定する。
【0021】
図6は、リンク形状推定部12と差分抽出部13とが行う処理の一例を示すフローチャートである。ステップS101では、通信処理部11が受信したプローブ情報を、リンク形状推定部12がプローブDB16へ記憶し、経路探索部14へもプローブ情報を出力する。ステップS102では、ステップS101でプローブDB16に記憶したプローブ情報から車両2の位置情報の履歴を読み出し、関数近似部121を用いてその位置情報の履歴に対する近似関数を算出し、車両2が走行した道路の推定形状を算出する。
【0022】
ステップS103では、図4のように地図DB17に含まれるリンクの中からリンクの始点と終点の近傍にステップS102で算出した推定形状の端点があるリンクを選択する。ステップS104では、図5のようにステップS103で選択したリンクの始点および終点の位置に基づいて、推定形状の端点を再指定する。ステップS105では、再指定された端点と、ステップS102で推定形状を算出したときの位置情報とを用いて関数近似部121が近似関数を再計算する。
【0023】
ステップS106では、差分抽出部13は、ステップS103で選択したリンクの形状関数をリンク関数DB18から読み込む。ステップS107では、差分抽出部13は、ステップS106で選択した形状関数と、ステップS105で再計算した近似関数との間の係数Akの差を算出する。ステップS108では、差分抽出部13は、ステップS107で算出した係数Akの差を差分係数DB19へ記憶する。
【0024】
図7は、経路探索部14と経路補間部15とが行う処理を表すフローチャートの一例である。ステップS201では、プローブDB16に記憶されるプローブ情報に含まれる出発地と目的地の情報に基づいて、経路探索を行う。ステップS202では、経路補間部15は、経路探索された経路に含まれるリンクについて、リンクの形状関数を地図関数DB18から読み出す。ステップS203では、経路補間部15は、差分関数DB19から係数Akの差を読み出す。ステップS204では、経路補間部15は、ステップS202で読み出した形状関数をステップS203で読み出した係数Akの差で補正する。ステップS205では、経路補間部15は、補正後の形状関数を接続し、経路の形状を作成する。ステップS206では、経路補間部15は、ステップS205で作成した経路の形状から形状描画用の点列を算出する。ステップS207では、経路補間部15は、ステップS206で算出した形状描画用の点列を、通信処理部11を介してナビゲーション装置21へ送信する。
【0025】
以上説明した各実施の形態によれば、次の作用効果を奏する。
本実施の形態のナビゲーションセンタは、車両2に搭載されるナビゲーション装置21からプローブ情報が送信されてきたときに通信処理部11が受信し、リンク形状推定部12へプローブ情報を出力し、リンク形状推定部12はそのプローブ情報をプローブDB16へ記憶する(ステップS101)。地図DB17はリンクの始点および終点の位置情報を含む地図データを記憶し、リンク関数DB18は地図情報に記憶されるリンクを描画するための形状関数を記憶している。リンク形状推定部12は、プローブ情報に含まれる車両の位置情報に対して関数近似部121を用いて近似関数を算出し推定形状を算出し(ステップS102)、地図DB17の地図データの中から対応するリンクを選択し(ステップS103)、選択したリンクの始点と終点とに対応する近似関数の線上に指定し(ステップS104)、関数近似部121を用いて近似関数を再計算する(ステップS105)。そして、差分抽出部13は、再計算した近似関数とリンク関数DB18に記憶されたリンクの形状関数との間で係数Akの差を算出する(ステップS106およびステップS107)。一方、経路探索部14は、出発地から目的地までの経路を探索し(ステップS201)、経路に含まれるリンクの形状関数をリンク関数DB18から読み込み(ステップS202)、その形状関数に係数Akの差を適用し経路の形状を補正し(ステップS203およびステップS204)、経路の形状を描画するための点列をナビゲーション装置21へ送信する(ステップS206およびステップS207)。このようにすることにより、ナビゲーション装置とナビゲーションセンタとの間で記憶している地図データが互いに異なる場合であっても正しく経路案内できる。
【0026】
以上の実施の形態は、以下のように変形して実施できる。
〔1〕上記の実施の形態では、リンク形状推定部12は、関数近似部121を利用して近似関数を2度計算したが、2度目の近似関数の算出は省略してもよい。差分抽出部13は、1度目の近似関数と、リンクの形状関数との比較を行ってもよい。
【0027】
〔2〕上記の実施の形態では、リンク形状推定部12は、近似関数に対応するリンクを選択するとき、リンク列を選択してもよい。この場合、リンク列の始点および終点から所定の距離の範囲に推定形状の両端があるか否かを判定すればよい。
【0028】
以上で説明した各実施の形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されない。
【符号の説明】
【0029】
1 ナビゲーションセンタ
2 車両
11 通信処理部
12 リンク形状推定部
13 差分抽出部
14 経路探索部
15 経路補間部
16 プローブDB
17、23 地図DB
18 リンク関数DB
19 差分係数DB
21 ナビゲーション装置
22 通信端末
24 表示部
25 車両位置取得部
【特許請求の範囲】
【請求項1】
車両に搭載されるナビゲーション装置からの要請で出発地から目的地までの案内用経路を探索するナビゲーションセンタにおいて、
前記車両の走行軌跡を少なくとも含むプローブ情報を前記ナビゲーション装置から受信するプローブ情報受信手段と、
前記プローブ情報受信手段により受信したプローブ情報を記憶するプローブ情報記憶手段と、
リンクの始点および終点の位置情報を含む地図情報を記憶する地図情報記憶手段と、
前記地図情報に記憶されるリンクを描画するための形状関数を記憶する形状関数記憶手段と、
前記プローブ情報記憶手段に記憶されたプローブ情報に含まれる前記車両の走行軌跡に基づいて、前記車両の走行軌跡に対応する近似関数を算出する近似関数算出手段と、
前記近似関数算出手段により算出された近似関数と、前記形状関数記憶手段に記憶された形状関数との差分を算出する差分算出手段と、
前記出発地から前記目的地までの経路を探索する経路探索手段と、
前記経路に含まれるリンクの形状関数を前記差分算出手段により算出された差分に基づいて補正する形状補正手段と、
前記形状補正手段により補正された形状関数に基づいた経路の形状を前記案内用経路の形状として前記ナビゲーション装置へ送信する案内用経路形状送信手段と、
を備えることを特徴とするナビゲーションセンタ。
【請求項2】
請求項1に記載のナビゲーションセンタにおいて、
前記近似関数算出手段は、
所定範囲における前記車両の走行軌跡に対応する線分の近似関数を算出し、
前記地図情報に含まれるリンクのうち、前記線分に対応するリンクを選択し、
選択されたリンクの始点と終点にそれぞれ対応する前記線分上または前記線分の延長線上の2点の位置を算出し、
前記線分の両端点を算出した2点の位置に基づいて補正することを特徴とするナビゲーションセンタ。
【請求項3】
請求項1または2に記載のナビゲーションセンタにおいて、
前記近似関数算出手段により算出された近似関数と、前記形状関数記憶手段に記憶された形状関数とは、次数が同一の関数であって、
前記差分算出手段は、
前記近似関数算出手段により算出された近似関数と、前記形状関数記憶手段に記憶された形状関数との各次の係数の差を前記差分として算出することを特徴とするナビゲーションセンタ。
【請求項1】
車両に搭載されるナビゲーション装置からの要請で出発地から目的地までの案内用経路を探索するナビゲーションセンタにおいて、
前記車両の走行軌跡を少なくとも含むプローブ情報を前記ナビゲーション装置から受信するプローブ情報受信手段と、
前記プローブ情報受信手段により受信したプローブ情報を記憶するプローブ情報記憶手段と、
リンクの始点および終点の位置情報を含む地図情報を記憶する地図情報記憶手段と、
前記地図情報に記憶されるリンクを描画するための形状関数を記憶する形状関数記憶手段と、
前記プローブ情報記憶手段に記憶されたプローブ情報に含まれる前記車両の走行軌跡に基づいて、前記車両の走行軌跡に対応する近似関数を算出する近似関数算出手段と、
前記近似関数算出手段により算出された近似関数と、前記形状関数記憶手段に記憶された形状関数との差分を算出する差分算出手段と、
前記出発地から前記目的地までの経路を探索する経路探索手段と、
前記経路に含まれるリンクの形状関数を前記差分算出手段により算出された差分に基づいて補正する形状補正手段と、
前記形状補正手段により補正された形状関数に基づいた経路の形状を前記案内用経路の形状として前記ナビゲーション装置へ送信する案内用経路形状送信手段と、
を備えることを特徴とするナビゲーションセンタ。
【請求項2】
請求項1に記載のナビゲーションセンタにおいて、
前記近似関数算出手段は、
所定範囲における前記車両の走行軌跡に対応する線分の近似関数を算出し、
前記地図情報に含まれるリンクのうち、前記線分に対応するリンクを選択し、
選択されたリンクの始点と終点にそれぞれ対応する前記線分上または前記線分の延長線上の2点の位置を算出し、
前記線分の両端点を算出した2点の位置に基づいて補正することを特徴とするナビゲーションセンタ。
【請求項3】
請求項1または2に記載のナビゲーションセンタにおいて、
前記近似関数算出手段により算出された近似関数と、前記形状関数記憶手段に記憶された形状関数とは、次数が同一の関数であって、
前記差分算出手段は、
前記近似関数算出手段により算出された近似関数と、前記形状関数記憶手段に記憶された形状関数との各次の係数の差を前記差分として算出することを特徴とするナビゲーションセンタ。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−145536(P2012−145536A)
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願番号】特願2011−5942(P2011−5942)
【出願日】平成23年1月14日(2011.1.14)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願日】平成23年1月14日(2011.1.14)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
[ Back to top ]