
ナビゲーションデバイスの位置を決定すること
【課題】ナビゲーションデバイスの位置を決定するための方法を提供すること。
【解決手段】ナビゲーションデバイスは、複数の異なる位置決定手順に基づいてナビゲーションデバイスの位置を決定するように適合される。各位置決定手順は、所定のパラメータセットと共に作用する。複数の地理的エリアが提供され、各地理的エリアは、位置決定手順のうちの1つに関連付けられる。ナビゲーションデバイスの近似的位置が決定され、この近似的位置に基づいて、ナビゲーションデバイスが位置している地理的エリアが決定される。決定された地理的エリアに基づいて、複数の位置決定手順のうちの1つが選択され、選択された位置決定手順に基づいて、ナビゲーションデバイスの位置が決定される。
【解決手段】ナビゲーションデバイスは、複数の異なる位置決定手順に基づいてナビゲーションデバイスの位置を決定するように適合される。各位置決定手順は、所定のパラメータセットと共に作用する。複数の地理的エリアが提供され、各地理的エリアは、位置決定手順のうちの1つに関連付けられる。ナビゲーションデバイスの近似的位置が決定され、この近似的位置に基づいて、ナビゲーションデバイスが位置している地理的エリアが決定される。決定された地理的エリアに基づいて、複数の位置決定手順のうちの1つが選択され、選択された位置決定手順に基づいて、ナビゲーションデバイスの位置が決定される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーションデバイスの位置を決定する方法に関し、そして、上記方法を用いる対応するナビゲーションデバイスに関する。
【背景技術】
【0002】
(関連技術)
開始位置、例えば、ユーザーの現在位置から目的地位置までユーザーを案内するためのナビゲーションシステムまたはナビゲーションデバイスが、当該技術分野において周知である。開始位置から目的地位置までのルートを計算した後に、ユーザーの現在位置が、決定され、この現在位置に基づいて、計算されたルートの案内情報は、光学的および/または音響的手段によってユーザーに出力され得る。例えば、ユーザーの現在位置および計算されたルートを示すマップは、ナビゲーションデバイスのディスプレイ上に表示され得る。案内情報を決定するために、そして検出するために、ユーザーが計算されたルートから離れる場合に、ユーザーの現在位置の正確な決定が必要とされる。それゆえに、特にナビゲーションデバイスが乗り物にインストールされる場合に、ナビゲーションデバイスは、複数の情報ソース、例えば、GPSまたはGalileoのような全地球位置決定システムベースの衛星から、モバイル電気通信ネットワークベースの無線から、そして回転速度計のデータまたは速度のデータのような乗り物の遠隔測定データから現在位置を決定する。しかしながら、異なるソースからの提供された位置決定情報が不一致または不正確であり得るので、現在の位置の正確な決定が困難である多くの状況がある。例えば、大きな都市の街道の谷において、反射のために、または乱された受信のために、衛星から位置決定信号は、不正確であり得る。さらに、複数の車線を有する道路上に、乗り物がどちらの車線上に移動するのを決めることが難しくあり得る。しかしながら、このことは、ドライバーが計算されたルートを従うために、特定の出口を出なければならない場合に、正しい車線上に乗り物のドライバーを案内するのにとって重要であり得る。
【発明の概要】
【発明が解決しようとする課題】
【0003】
それゆえに、本発明の目的は、ナビゲーションデバイスの現在位置、特に、乗り物にインストールされるナビゲーションデバイスの現在位置を決定するための改善を提供することである。
【課題を解決するための手段】
【0004】
(本発明の要約)
この目的は、請求項1に規定されるナビゲーションの位置を決定する方法および請求項7に規定されるナビゲーションデバイスによって達成される。従属請求項は、本発明の好ましく、有益な実施形態を規定する。
【0005】
本発明に従って、ナビゲーションデバイスの位置を決定するための方法が提供される。ナビゲーションデバイスは、複数の異なる位置決定手順に基づいてナビゲーションデバイスの位置を決定するように適合される。方法に従って、複数の異なる位置決定手順が提供され、各位置決定手順は、所定のパラメータセットと共に作用する。さらに、複数の地理的エリアが提供され、各地理的エリアは、位置決定手順のうちの1つに関連付けられる。しかしながら、1つの位置決定手順は、1つ以上の地理的エリアに割り当てられ得る。さらに、ナビゲーションデバイスの近似的位置が決定される。近似的位置は、例えば、単一の位置決定情報ソース、例えば、衛星ベースの全地球位置決定システムまたはモバイル電気通信ネットワークに基づいて決定され得る。本発明の内容、近似的位置は、例えば、数100メートルの精度を用いて決定される位置を含み得る。近似的位置の必要とされた精度は、近似的位置に基づいてナビゲーションデバイスが位置している複数の地理的エリアのうちの1つが決定されるように、提供された地理的エリアの大きさに依存する。それゆえに、近似的位置の必要とされる精度は、ナビゲーションデバイスの位置に基づいて変化し得る。近似的位置の精度が地理的エリアのうちの1つを固有に識別するのに十分に高くない場合に、全部の方法は、仮定された近似的位置を用いて開始するように繰り返して行われ得る。決定された地理的エリアに基づいて、複数の位置決定手順の関連付けられた位置決定手順が選択され、そしてナビゲーションデバイスのより正確な位置を決定するために使用される。複数の異なる位置決定手順は、ナビゲーションデバイスの位置を決定するための異なる位置決定アルゴリズムおよび/または異なる所定のパラメータセットを含み得る。さらに、異なる位置決定手順は、同じアルゴリズムに頼り得、異なる位置決定手順の所定のパラメータセットのみが変えられ得る。従って、向上された位置決定は、異なる地理的エリアに対して達成され得る。位置決定手順においてある地理的エリアの典型的な位置決定問題の知識を利用することによって、向上された位置決定は、この地理的エリアに適合される位置決定手順を用いて提供され得る。
【0006】
実施形態に従って、所定のパラメータセットのうちの少なくとも1つのパラメータは、位置決定情報ソースに対する加重を規定する。位置決定情報ソースは、位置決定手順に位置決定情報を提供する。加重は、ナビゲーションデバイスの位置が、位置決定情報ソースの位置決定情報に基づいて決定される場合に、位置決定情報ソースから位置決定情報を調整するための加重を規定する。例えば、位置決定情報ソースは、衛星ベースの全地球位置決定デバイス、乗り物のステアリングホイールのステアリング角センサー、乗り物の回転速度計センサー、例えば、乗り物が坂で上へまたは下へ走行するかを示す乗り物の傾斜角センサー、乗り物の本体の回転を示すジャイロセンサー、無線ベースのモバイル通信ネットワークから位置決定情報を提供するモバイル通信ネットワークベースの位置決定デバイス、または乗り物が通過する電子料金収集ブリッジの位置の情報を提供する電子料金収集ベースの位置決定デバイスを含み得る。複数の前述のまたはさらなる位置決定情報ソースが位置決定情報を提供する場合に、複数の位置決定情報は、互いから逸脱し得、従って不一致し得る。異なる位置決定情報ソースから送出された位置決定情報の各々を加重することによって、位置決定情報ソースの各々の信頼性が考慮され得る。加重が異なる地理的エリアに対して異なる場合があり得るので、各位置決定情報ソースは、ナビゲーションデバイスの位置を決定するために、適切に考慮され得る。例えば、衛星ベースの全地球位置決定情報が街道の谷での反射のために壊され得、または良好でない受信品質を提供し得るエリアにおいて、衛星ベースの全地球位置決定情報の加重は、低くてあり得、その一方で、衛星ベースの全地球位置決定情報のよい受信が期待される他のエリアにおいて、加重は、高くてあり得る。
【0007】
もう1つの実施形態に従って、所定のパラメータセットのうちの少なくとも1つは、ナビゲーションデバイスの位置を決定するために、位置決定手順によって使用されるべきである、例えば、車線の幅、車線の数、または転回角の閾値を規定する。1つの地理的エリア、例えば、第1の都市内の車線の幅は、もう1つの地理的エリア、例えば、第2の都市内の車線の幅に比べて異なる場合があり得る。それゆえに、ナビゲーションデバイスが位置している地理的エリアに依存する車線の幅を適合することによって、現在の位置または道路からの逸脱がより正確に決定され得る。さらに、いくつかのエリアにおいて、道路分岐は、典型的に、小さな角度を有し得、その一方で、他のエリアにおいて、道路分岐は、典型的に、より大きな角度を有し得る。それゆえに、異なる転回角の閾値は、乗り物が道路分岐において道路から逸脱しているか否かを決定するために、異なるエリアにおいて使用され得る。例えば、道路分岐においてより大きな角度を有するエリアにおいて、乗り物は、乗り物が道路分岐において道路を出ることを検出するために、大きく転回しなければならない。さらに、転回角の閾値は、車線の変更を検出するために使用され得る。いくつかのエリアにおいて、乗り物は、車線の変更を検出するために、著しく転回しなければならず、その一方で、他のエリアにおいて、若干の転回も車線の変更を検出するために考慮され得る。
【0008】
地理的エリアは、例えば、都市領域、村落領域、特定の都市、山の領域、平地領域、特定の国家、特定の地方領域、または特定の道路を含み得る。さらに、特に大きな都市内に、異なる地理的エリアは、1つの都市内に規定され得る。例えば、北京のようなリング構造を有する都市に対して、地理的エリアは、都市のリング、またはリングの道路自身にも関連付けられ得る。
【0009】
実施形態において、複数の異なる位置決定手順は、初期の位置決定手順を含み、ナビゲーションデバイスの近似的位置に基づいて決定され得る地理的エリアがない場合に、初期の位置決定手順は、ナビゲーションデバイスの位置を決定するために使用される。従って、近似的位置が決定され得る場合があらず、または現在の地理的位置に対して規定される特定の位置決定手順がない場合において、初期の位置決定手順が使用される。
【0010】
本発明に従って、ナビゲーションデバイスが提供される。ナビゲーションデバイスは、処理ユニット、メモリ、および位置決定ユニットを含む。メモリは、複数の位置決定手順を格納するように適合される。各位置決定手順は、メモリにも格納される所定のパラメータセットで働く。さらに、メモリは、複数の地理的エリアと、位置決定手順のうちの1つに地理的エリアの各々を関連付ける関連付けとを格納するように適合される。本発明の内容において複数の地理的エリアを格納することは、地理的エリアを説明する地理的情報を格納することに関する。例えば、地理的エリアの地理的情報は、地理的エリアの輪郭を説明し得る。位置決定ユニットは、ナビゲーションデバイスの近似的位置を決定するように適合される。位置決定ユニットは、例えば、例えば衛星ベースの全地球位置決定システムまたはモバイル通信ネットワークベースの位置決定システムに提供される絶対位置決定情報に基づいてナビゲーションデバイスの近似的位置を決定し得、または位置決定ユニットは、ナビゲーションデバイスの事前に決定された位置に基づいて近似的位置を決定し得、例えば、ステアリング角センサーまたはナビゲーションデバイスがインストールされる乗り物の回転速度計センサーまたは加速度センサーに基づいて位置の相対的変更を決定し得る。処理ユニットは、複数の位置決定手順に基づいてナビゲーションデバイスの位置を決定するように適合される。処理ユニットは、ナビゲーションデバイスの近似的位置に基づいて、ナビゲーションデバイスが位置している地理的エリアを決定し、決定された地理的エリアに基づいて複数の位置決定手順のうちの1つを選択する。選択された位置決定手順に基づいて、ナビゲーションデバイスの位置が、最終的により正確に決定される。
【0011】
実施形態に従って、ナビゲーションデバイスは、前述の方法およびそれらの実施形態を行うように適合され、それゆえに前述の利点も含む。ナビゲーションデバイスは、モバイルパーソナルナビゲーションデバイスまたは乗り物にインストールされる乗り物のナビゲーションデバイスを含む。モバイルパーソナルナビゲーションデバイスは、乗り物の内部または外部に使用され得る手持ちのデバイスであり得る。乗り物のナビゲーションデバイスは、乗り物にインストールされるナビゲーションデバイスを含み得、または乗り物のエンターテイメントシステムまたは制御システムの一部分であり得る。
【0012】
本発明は、例えば、以下の項目を提供する。
(項目1)
ナビゲーションデバイスの位置を決定する方法であって、該ナビゲーションデバイス(100)は、複数の異なる位置決定手順(301〜304)に基づいて該ナビゲーションデバイス(100)の位置を決定するように適合され、該方法は、
該複数の異なる位置決定手順(301〜304)を提供するステップであって、各位置決定手順(301〜304)は、所定のパラメータセットと共に作用する、ステップと、
複数の地理的エリア(A〜C)を提供するステップであって、各地理的エリア(A〜C)は、該位置決定手順(301〜304)のうちの1つの手順に関連付けられる、ステップと、
該ナビゲーションデバイス(100)の近似的位置を決定するステップと、
該ナビゲーションデバイス(100)の該近似的位置に基づいて、該複数の地理的エリア(A〜C)から、該ナビゲーションデバイス(100)が位置している地理的エリア(A〜C)を決定するステップと、
該決定された地理的エリア(A〜C)に基づいて、該複数の位置決定手順(301〜304)のうちの1つの手順を選択するステップと、
該選択された位置決定手順(301〜304)に基づいて、該ナビゲーションデバイス(100)の位置を決定するステップと
を含む、方法。
(項目2)
上記所定のパラメータセットのうちの少なくとも1つのパラメータは、上記位置決定手順に対する位置決定情報を提供する位置決定情報ソース(105〜107)の加重を規定し、該加重は、該位置決定情報ソース(105〜107)に基づいて上記ナビゲーションデバイス(100)の位置を決定するための加重を規定する、上記項目のいずれかに記載の方法。
(項目3)
上記位置決定情報ソース(105〜107)は、衛星ベースの全地球位置決定システム(105)、ステアリング角センサー、回転速度計センサー、傾斜角センサー、ジャイロセンサー、モバイル通信ネットワークベースの位置決定システム(106)、および電子料金収集ベースの位置決定システム(107)からなるグループのうちの少なくとも1つを含む、上記項目のいずれかに記載の方法。
(項目4)
上記所定のパラメータセットのうちの少なくとも1つは、上記ナビゲーションデバイス(100)の上記位置を決定するために、上記位置決定手順(301〜304)によって使用されるべきである車線の幅、車線の数、および転回角の閾値を含むグループのうちの少なくとも1つを規定する、上記項目のいずれかに記載の方法。
(項目5)
上記地理的エリア(A〜C)は、都市領域、村落領域、特定の都市、山の領域、平地領域、特定の国家、特定の地方領域、および特定の道路からなるグループのうちの少なくとも1つを含む、上記項目のいずれかに記載の方法。
(項目6)
上記複数の異なる位置決定手順(301〜304)は、初期の位置決定手順(304)を含み、上記ナビゲーションデバイス(100)の上記近似的位置に基づいて決定され得る地理的エリア(A〜C)がない場合に、該ナビゲーションデバイス(100)の上記位置は、該初期の位置決定手順(304)に基づいて決定される、上記項目のいずれかに記載の方法。
(項目7)
ナビゲーションデバイスであって、該ナビゲーションデバイスは、
複数の位置決定手順(301〜304)に基づいて該ナビゲーションデバイス(100)の位置を決定するように適合される処理ユニット(103)であって、各位置決定手順(301〜304)は、所定のパラメータセットと共に作用する、処理ユニットと、
該複数の位置決定手順(301〜304)、該所定のパラメータセット、および複数の地理的エリア(A〜C)を格納するためのメモリであって、各地理的エリア(A〜C)は、該位置決定手順(301〜304)のうちの1つに関連付けられる、メモリ(104)と、
該ナビゲーションデバイス(100)の近似的位置を決定するように適合される位置決定ユニット(101)と、
を含み、
該処理ユニット(103)はさらに、該ナビゲーションデバイス(100)の該近似的位置に基づいて該複数の地理的エリア(A〜C)から該ナビゲーションデバイス(100)が位置している地理的エリア(A〜C)を決定し、該決定された地理的エリア(A〜C)に基づいて該複数の位置決定手順(301〜304)のうちの1つを選択し、そして該選択された位置決定手順(301〜304)に基づいて該ナビゲーションデバイス(100)の該位置を決定するように適合される、ナビゲーションデバイス。
(項目8)
上記ナビゲーションデバイス(100)は、上記項目のいずれかに記載の方法を行うように適合される、上記項目のいずれかに記載のナビゲーションデバイス。
(項目9)
上記ナビゲーションデバイス(100)は、モバイルパーソナルナビゲーションデバイスまたは乗り物のナビゲーションデバイスを含む、上記項目のいずれかに記載のナビゲーションデバイス。
【0013】
(摘要)
本発明は、ナビゲーションデバイス(100)の位置を決定するための方法に関する。ナビゲーションデバイス(100)は、複数の異なる位置決定手順(301〜304)に基づいてナビゲーションデバイス(100)の位置を決定するように適合される。各位置決定手順(301〜304)は、所定のパラメータセットを用いて働く。複数の地理的エリア(A〜C)が提供され、各地理的エリア(A〜C)は、位置決定手順(301〜304)のうちの1つに関連付けられる。ナビゲーションデバイス(100)の近似的位置が決定され、この近似的位置に基づいて、ナビゲーションデバイス(100)が位置している地理的エリア(A〜C)が決定される。決定された地理的エリア(A〜C)に基づいて、複数の位置決定手順(301〜304)のうちの1つが選択され、選択された位置決定手順(301〜304)に基づいて、ナビゲーションデバイス(100)の位置が決定される。
【0014】
ここで、本発明の実施形態は、添付の図面を参照してより詳細に説明される。
【図面の簡単な説明】
【0015】
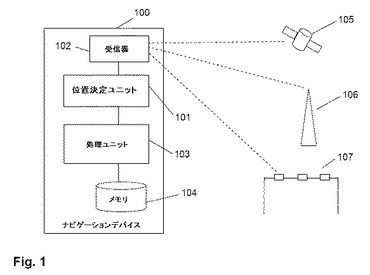
【図1】図1は、本発明の実施形態に従うナビゲーションデバイスの概略図を示す。
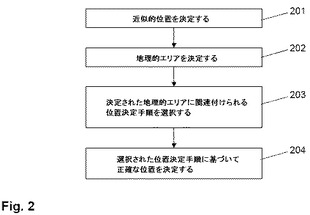
【図2】図2は、本発明の実施形態に従う方法のステップを含むフローチャートを示す。
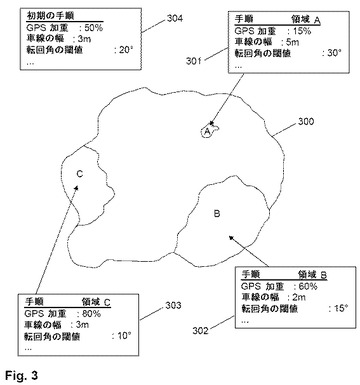
【図3】図3は、複数の地理的エリアおよび関連付けられた位置決定手順を示す。
【発明を実施するための形態】
【0016】
(好ましい実施形態の詳細な説明)
以下において、本発明の代表的な実施形態がより詳細に説明される。以下の説明が本発明の原理を例示する目的のみのために与えられ、限定の意味を取り入れるべきではないことが理解されなければならない。むしろ、本発明の範囲は、添付の請求範囲のみによって規定され、本明細書の後の代表的な実施形態によって限定されるように意図されない。
【0017】
他に特別に注意される以外に、本明細書において説明されるさまざまな代表的な実施形態の特徴が互いに組み合わせられ得ることが理解されるべきである。しかしながら、複数の特徴を有する実施形態を説明するのは、他の実施形態がより少ない特徴および/または代替的な特徴を含み得るので、その全部の特徴が本発明を実施するのに必要であることを示すように解釈されるべきではない。
【0018】
図1は、受信器102、処理ユニット103およびメモリ104と接続される位置決定ユニット101を含むナビゲーションシステム100を示す。ナビゲーションデバイス100はさらに、ディスプレイ、キーパッド、拡声器および簡潔の理由のために示されていない他の部品を含み得る。受信器102は、衛星ベースの位置決定システム105、モバイル通信ネットワークベースの位置決定システム106および/または電子料金収集ベースの位置決定システム107からの位置決定情報を受信するように適合され得る。位置決定ユニット101はさらに、ナビゲーションデバイス100が取り付けられる乗り物のセンサーに結合され得る。センサーは、例えば、乗り物の現在の速度または乗り物が移動する距離を示す回転速度計、乗り物の現在のステアリング角を示すステアリング角センサー、乗り物が上または下へ走行する傾斜角を示す傾斜角センサー、乗り物の本体の回転を示すジャイロセンサー、および乗り物の現在の加速度を示す加速度センサーを含み得る。
【0019】
ここで、ナビゲーションデバイス100の動作が、図2および図3に関連してより詳細に説明される。
【0020】
ステップ201において、ナビゲーションデバイス100の大まかまたは近似的位置が決定される。例えば、近似的位置は、衛星全地球位置決定システム(GPS)105、モバイル通信システム106、例えば乗り物が料金収集ブリッジを通過する場合の電子料金収集システム107に基づいて決定され得、または事前に決定された位置、および回転速度計の信号および/または乗り物のステアリング角の信号に基づいて、または乗り物またはナビゲーションデバイス100に提供される加速度センサーに基づいて決定されたオフセットに基づいて決定され得る。
【0021】
ステップ202において、決定された近似的位置は、ナビゲーションシステムが位置している地理的エリアを決定するために使用される。例えば、図3に示されるように、ナビゲーションデバイス100のルーティングエリア300のマップ、例えば、国家、大陸または全世界は、特定の地理的エリアA、BおよびCを提供し得る。もっと多くのエリアが提供されるが、しかしながら簡潔な理由のために、図3において、3つのエリアのみが示される。さらに、ルーティングエリア300のいくつかのエリアは、図3に書いていないエリアによって示されるような特定の地理的エリアに割り当てられない場合もある。従って、決定された近似的位置に基づいて、ステップ202において、ナビゲーションデバイスが、領域A、領域B、領域Cまたは領域A〜C以外に位置しているかを決定される。ステップ203において、決定された地理的エリアまたは領域に関連付けられる位置決定手順が選択される。図3に示されるように、4つの位置決定手順301〜304が提供される。位置決定手順301が地理的エリアAに関連付けられ、位置決定手順302が地理的エリアBに関連付けられ、そして位置決定手順303が地理的エリアCに関連付けられる。初期位置決定手順304が提供され、そしてルーティングエリア300の残りのエリアのために使用されるべきである。位置決定手順は、ナビゲーションシステムの位置を決定するために使用されなければならないソフトウェアの特定の部分を含み得、または市販のソフトウェアによって使用されなければならない特定のパラメータセットを含み得る。しかしながら、特定のソフトウェアおよび特定のパラメータセットさえが組み合わせて使用され得る。ステップ204において、近似的位置より正確であるナビゲーションデバイスの正確な位置は、選択された位置決定手順に基づいて決定される。
【0022】
図3に示されるように、乗り物が、例えば、領域Aに位置している場合に、選択された位置決定手順は、15%のGPS加重を使用し、5メートルのこの領域に対して車線幅を仮定し、そして30°の転回角度閾値を使用する。さらに、パラメータは、位置決定手順、例えば、位置決定システム、例えば、Galileoに基づいて他の衛星の位置決定情報を使用するための加重、モバイル電気通信ネットワークに基づいて位置決定情報を使用するための加重、または電子料金収集システムに基づいて位置決定情報を使用するための加重によって規定され得る。さらに、傾斜角センサーのための加重は、位置決定手順の部分であり得る。傾斜角に基づいて、2つの車線がごく平行に走っており、1つの車線が上へ行き、もう1つの車線が下へ行く場合に、乗り物がどちらの車線に走行するのを決定され得る。さらに、料金収集ブリッジを有する有料道路に走行する場合に、乗り物を監視し、かつ料金を収集するために、乗り物の正確な位置は、乗り物が料金収集ブリッジを通過する場合に決定され得る。さらに、2つの道路がごく平行に走っており、1つの道路が料金道路であり、もう1つの道路が料金フリーの道路である場合に、料金収集システムに基づいて乗り物が料金道路または料金フリー道路に走行するのかが決定され得る。
【0023】
ステップ202において、決定され得る特定の地理的エリアがあらず、図3の例において乗り物がエリアA〜Cにないことを意味する場合に、ステップ203において、初期位置決定手順304は、ステップ204において乗り物の正確な位置を決定するために選択される。
【0024】
従って、異なるエリア、特に都市において異なる位置決定手順およびパラメータを使用することによって、あるエリアにおいて典型的な位置決定問題に関する知識が、位置決定を向上するために利用され得る。例えば、1つの都市において、多くの車線に対して入口および出口を正しく検出するのが問題であり得、その一方で、他の都市において、分岐および付加の回り道において乗り物の正しい位置を検出するのが問題であり得る。車線の幅、車線の数、転回角の閾値、および前述のさらなるパラメータを考慮することによって、位置決定の精度が向上され得る。
【0025】
代表的な実施形態が上に説明されたが、さまざまな変更が他の実施形態においてインプリメントされ得る。例えば、ジャイロセンサーおよび傾斜センサーが、ナビゲーションデバイス100によって含まれ得、従って、向上された位置決定はまた、歩きまたはハイキングのために使用される手持ちのナビゲーションデバイス、または乗り物のセンサーに接続されていない乗り物において達成され得る。
【0026】
最後、前述の全部の実施形態は、添付の請求項によって規定されるので、本発明によって含まれるように考慮されることが理解されるべきである。既に強調されるように、前述の実施形態は、例示的な例としてのみ役に立ち、本出願の範囲は、これらの実施形態に限定されず、むしろ、本出願の範囲は、添付の請求項およびそれらの同等物によってのみ限定されることが意図される。
【符号の説明】
【0027】
A〜C 地理的エリア
300 ルーティングエリア
301〜304 位置決定手順
【技術分野】
【0001】
本発明は、ナビゲーションデバイスの位置を決定する方法に関し、そして、上記方法を用いる対応するナビゲーションデバイスに関する。
【背景技術】
【0002】
(関連技術)
開始位置、例えば、ユーザーの現在位置から目的地位置までユーザーを案内するためのナビゲーションシステムまたはナビゲーションデバイスが、当該技術分野において周知である。開始位置から目的地位置までのルートを計算した後に、ユーザーの現在位置が、決定され、この現在位置に基づいて、計算されたルートの案内情報は、光学的および/または音響的手段によってユーザーに出力され得る。例えば、ユーザーの現在位置および計算されたルートを示すマップは、ナビゲーションデバイスのディスプレイ上に表示され得る。案内情報を決定するために、そして検出するために、ユーザーが計算されたルートから離れる場合に、ユーザーの現在位置の正確な決定が必要とされる。それゆえに、特にナビゲーションデバイスが乗り物にインストールされる場合に、ナビゲーションデバイスは、複数の情報ソース、例えば、GPSまたはGalileoのような全地球位置決定システムベースの衛星から、モバイル電気通信ネットワークベースの無線から、そして回転速度計のデータまたは速度のデータのような乗り物の遠隔測定データから現在位置を決定する。しかしながら、異なるソースからの提供された位置決定情報が不一致または不正確であり得るので、現在の位置の正確な決定が困難である多くの状況がある。例えば、大きな都市の街道の谷において、反射のために、または乱された受信のために、衛星から位置決定信号は、不正確であり得る。さらに、複数の車線を有する道路上に、乗り物がどちらの車線上に移動するのを決めることが難しくあり得る。しかしながら、このことは、ドライバーが計算されたルートを従うために、特定の出口を出なければならない場合に、正しい車線上に乗り物のドライバーを案内するのにとって重要であり得る。
【発明の概要】
【発明が解決しようとする課題】
【0003】
それゆえに、本発明の目的は、ナビゲーションデバイスの現在位置、特に、乗り物にインストールされるナビゲーションデバイスの現在位置を決定するための改善を提供することである。
【課題を解決するための手段】
【0004】
(本発明の要約)
この目的は、請求項1に規定されるナビゲーションの位置を決定する方法および請求項7に規定されるナビゲーションデバイスによって達成される。従属請求項は、本発明の好ましく、有益な実施形態を規定する。
【0005】
本発明に従って、ナビゲーションデバイスの位置を決定するための方法が提供される。ナビゲーションデバイスは、複数の異なる位置決定手順に基づいてナビゲーションデバイスの位置を決定するように適合される。方法に従って、複数の異なる位置決定手順が提供され、各位置決定手順は、所定のパラメータセットと共に作用する。さらに、複数の地理的エリアが提供され、各地理的エリアは、位置決定手順のうちの1つに関連付けられる。しかしながら、1つの位置決定手順は、1つ以上の地理的エリアに割り当てられ得る。さらに、ナビゲーションデバイスの近似的位置が決定される。近似的位置は、例えば、単一の位置決定情報ソース、例えば、衛星ベースの全地球位置決定システムまたはモバイル電気通信ネットワークに基づいて決定され得る。本発明の内容、近似的位置は、例えば、数100メートルの精度を用いて決定される位置を含み得る。近似的位置の必要とされた精度は、近似的位置に基づいてナビゲーションデバイスが位置している複数の地理的エリアのうちの1つが決定されるように、提供された地理的エリアの大きさに依存する。それゆえに、近似的位置の必要とされる精度は、ナビゲーションデバイスの位置に基づいて変化し得る。近似的位置の精度が地理的エリアのうちの1つを固有に識別するのに十分に高くない場合に、全部の方法は、仮定された近似的位置を用いて開始するように繰り返して行われ得る。決定された地理的エリアに基づいて、複数の位置決定手順の関連付けられた位置決定手順が選択され、そしてナビゲーションデバイスのより正確な位置を決定するために使用される。複数の異なる位置決定手順は、ナビゲーションデバイスの位置を決定するための異なる位置決定アルゴリズムおよび/または異なる所定のパラメータセットを含み得る。さらに、異なる位置決定手順は、同じアルゴリズムに頼り得、異なる位置決定手順の所定のパラメータセットのみが変えられ得る。従って、向上された位置決定は、異なる地理的エリアに対して達成され得る。位置決定手順においてある地理的エリアの典型的な位置決定問題の知識を利用することによって、向上された位置決定は、この地理的エリアに適合される位置決定手順を用いて提供され得る。
【0006】
実施形態に従って、所定のパラメータセットのうちの少なくとも1つのパラメータは、位置決定情報ソースに対する加重を規定する。位置決定情報ソースは、位置決定手順に位置決定情報を提供する。加重は、ナビゲーションデバイスの位置が、位置決定情報ソースの位置決定情報に基づいて決定される場合に、位置決定情報ソースから位置決定情報を調整するための加重を規定する。例えば、位置決定情報ソースは、衛星ベースの全地球位置決定デバイス、乗り物のステアリングホイールのステアリング角センサー、乗り物の回転速度計センサー、例えば、乗り物が坂で上へまたは下へ走行するかを示す乗り物の傾斜角センサー、乗り物の本体の回転を示すジャイロセンサー、無線ベースのモバイル通信ネットワークから位置決定情報を提供するモバイル通信ネットワークベースの位置決定デバイス、または乗り物が通過する電子料金収集ブリッジの位置の情報を提供する電子料金収集ベースの位置決定デバイスを含み得る。複数の前述のまたはさらなる位置決定情報ソースが位置決定情報を提供する場合に、複数の位置決定情報は、互いから逸脱し得、従って不一致し得る。異なる位置決定情報ソースから送出された位置決定情報の各々を加重することによって、位置決定情報ソースの各々の信頼性が考慮され得る。加重が異なる地理的エリアに対して異なる場合があり得るので、各位置決定情報ソースは、ナビゲーションデバイスの位置を決定するために、適切に考慮され得る。例えば、衛星ベースの全地球位置決定情報が街道の谷での反射のために壊され得、または良好でない受信品質を提供し得るエリアにおいて、衛星ベースの全地球位置決定情報の加重は、低くてあり得、その一方で、衛星ベースの全地球位置決定情報のよい受信が期待される他のエリアにおいて、加重は、高くてあり得る。
【0007】
もう1つの実施形態に従って、所定のパラメータセットのうちの少なくとも1つは、ナビゲーションデバイスの位置を決定するために、位置決定手順によって使用されるべきである、例えば、車線の幅、車線の数、または転回角の閾値を規定する。1つの地理的エリア、例えば、第1の都市内の車線の幅は、もう1つの地理的エリア、例えば、第2の都市内の車線の幅に比べて異なる場合があり得る。それゆえに、ナビゲーションデバイスが位置している地理的エリアに依存する車線の幅を適合することによって、現在の位置または道路からの逸脱がより正確に決定され得る。さらに、いくつかのエリアにおいて、道路分岐は、典型的に、小さな角度を有し得、その一方で、他のエリアにおいて、道路分岐は、典型的に、より大きな角度を有し得る。それゆえに、異なる転回角の閾値は、乗り物が道路分岐において道路から逸脱しているか否かを決定するために、異なるエリアにおいて使用され得る。例えば、道路分岐においてより大きな角度を有するエリアにおいて、乗り物は、乗り物が道路分岐において道路を出ることを検出するために、大きく転回しなければならない。さらに、転回角の閾値は、車線の変更を検出するために使用され得る。いくつかのエリアにおいて、乗り物は、車線の変更を検出するために、著しく転回しなければならず、その一方で、他のエリアにおいて、若干の転回も車線の変更を検出するために考慮され得る。
【0008】
地理的エリアは、例えば、都市領域、村落領域、特定の都市、山の領域、平地領域、特定の国家、特定の地方領域、または特定の道路を含み得る。さらに、特に大きな都市内に、異なる地理的エリアは、1つの都市内に規定され得る。例えば、北京のようなリング構造を有する都市に対して、地理的エリアは、都市のリング、またはリングの道路自身にも関連付けられ得る。
【0009】
実施形態において、複数の異なる位置決定手順は、初期の位置決定手順を含み、ナビゲーションデバイスの近似的位置に基づいて決定され得る地理的エリアがない場合に、初期の位置決定手順は、ナビゲーションデバイスの位置を決定するために使用される。従って、近似的位置が決定され得る場合があらず、または現在の地理的位置に対して規定される特定の位置決定手順がない場合において、初期の位置決定手順が使用される。
【0010】
本発明に従って、ナビゲーションデバイスが提供される。ナビゲーションデバイスは、処理ユニット、メモリ、および位置決定ユニットを含む。メモリは、複数の位置決定手順を格納するように適合される。各位置決定手順は、メモリにも格納される所定のパラメータセットで働く。さらに、メモリは、複数の地理的エリアと、位置決定手順のうちの1つに地理的エリアの各々を関連付ける関連付けとを格納するように適合される。本発明の内容において複数の地理的エリアを格納することは、地理的エリアを説明する地理的情報を格納することに関する。例えば、地理的エリアの地理的情報は、地理的エリアの輪郭を説明し得る。位置決定ユニットは、ナビゲーションデバイスの近似的位置を決定するように適合される。位置決定ユニットは、例えば、例えば衛星ベースの全地球位置決定システムまたはモバイル通信ネットワークベースの位置決定システムに提供される絶対位置決定情報に基づいてナビゲーションデバイスの近似的位置を決定し得、または位置決定ユニットは、ナビゲーションデバイスの事前に決定された位置に基づいて近似的位置を決定し得、例えば、ステアリング角センサーまたはナビゲーションデバイスがインストールされる乗り物の回転速度計センサーまたは加速度センサーに基づいて位置の相対的変更を決定し得る。処理ユニットは、複数の位置決定手順に基づいてナビゲーションデバイスの位置を決定するように適合される。処理ユニットは、ナビゲーションデバイスの近似的位置に基づいて、ナビゲーションデバイスが位置している地理的エリアを決定し、決定された地理的エリアに基づいて複数の位置決定手順のうちの1つを選択する。選択された位置決定手順に基づいて、ナビゲーションデバイスの位置が、最終的により正確に決定される。
【0011】
実施形態に従って、ナビゲーションデバイスは、前述の方法およびそれらの実施形態を行うように適合され、それゆえに前述の利点も含む。ナビゲーションデバイスは、モバイルパーソナルナビゲーションデバイスまたは乗り物にインストールされる乗り物のナビゲーションデバイスを含む。モバイルパーソナルナビゲーションデバイスは、乗り物の内部または外部に使用され得る手持ちのデバイスであり得る。乗り物のナビゲーションデバイスは、乗り物にインストールされるナビゲーションデバイスを含み得、または乗り物のエンターテイメントシステムまたは制御システムの一部分であり得る。
【0012】
本発明は、例えば、以下の項目を提供する。
(項目1)
ナビゲーションデバイスの位置を決定する方法であって、該ナビゲーションデバイス(100)は、複数の異なる位置決定手順(301〜304)に基づいて該ナビゲーションデバイス(100)の位置を決定するように適合され、該方法は、
該複数の異なる位置決定手順(301〜304)を提供するステップであって、各位置決定手順(301〜304)は、所定のパラメータセットと共に作用する、ステップと、
複数の地理的エリア(A〜C)を提供するステップであって、各地理的エリア(A〜C)は、該位置決定手順(301〜304)のうちの1つの手順に関連付けられる、ステップと、
該ナビゲーションデバイス(100)の近似的位置を決定するステップと、
該ナビゲーションデバイス(100)の該近似的位置に基づいて、該複数の地理的エリア(A〜C)から、該ナビゲーションデバイス(100)が位置している地理的エリア(A〜C)を決定するステップと、
該決定された地理的エリア(A〜C)に基づいて、該複数の位置決定手順(301〜304)のうちの1つの手順を選択するステップと、
該選択された位置決定手順(301〜304)に基づいて、該ナビゲーションデバイス(100)の位置を決定するステップと
を含む、方法。
(項目2)
上記所定のパラメータセットのうちの少なくとも1つのパラメータは、上記位置決定手順に対する位置決定情報を提供する位置決定情報ソース(105〜107)の加重を規定し、該加重は、該位置決定情報ソース(105〜107)に基づいて上記ナビゲーションデバイス(100)の位置を決定するための加重を規定する、上記項目のいずれかに記載の方法。
(項目3)
上記位置決定情報ソース(105〜107)は、衛星ベースの全地球位置決定システム(105)、ステアリング角センサー、回転速度計センサー、傾斜角センサー、ジャイロセンサー、モバイル通信ネットワークベースの位置決定システム(106)、および電子料金収集ベースの位置決定システム(107)からなるグループのうちの少なくとも1つを含む、上記項目のいずれかに記載の方法。
(項目4)
上記所定のパラメータセットのうちの少なくとも1つは、上記ナビゲーションデバイス(100)の上記位置を決定するために、上記位置決定手順(301〜304)によって使用されるべきである車線の幅、車線の数、および転回角の閾値を含むグループのうちの少なくとも1つを規定する、上記項目のいずれかに記載の方法。
(項目5)
上記地理的エリア(A〜C)は、都市領域、村落領域、特定の都市、山の領域、平地領域、特定の国家、特定の地方領域、および特定の道路からなるグループのうちの少なくとも1つを含む、上記項目のいずれかに記載の方法。
(項目6)
上記複数の異なる位置決定手順(301〜304)は、初期の位置決定手順(304)を含み、上記ナビゲーションデバイス(100)の上記近似的位置に基づいて決定され得る地理的エリア(A〜C)がない場合に、該ナビゲーションデバイス(100)の上記位置は、該初期の位置決定手順(304)に基づいて決定される、上記項目のいずれかに記載の方法。
(項目7)
ナビゲーションデバイスであって、該ナビゲーションデバイスは、
複数の位置決定手順(301〜304)に基づいて該ナビゲーションデバイス(100)の位置を決定するように適合される処理ユニット(103)であって、各位置決定手順(301〜304)は、所定のパラメータセットと共に作用する、処理ユニットと、
該複数の位置決定手順(301〜304)、該所定のパラメータセット、および複数の地理的エリア(A〜C)を格納するためのメモリであって、各地理的エリア(A〜C)は、該位置決定手順(301〜304)のうちの1つに関連付けられる、メモリ(104)と、
該ナビゲーションデバイス(100)の近似的位置を決定するように適合される位置決定ユニット(101)と、
を含み、
該処理ユニット(103)はさらに、該ナビゲーションデバイス(100)の該近似的位置に基づいて該複数の地理的エリア(A〜C)から該ナビゲーションデバイス(100)が位置している地理的エリア(A〜C)を決定し、該決定された地理的エリア(A〜C)に基づいて該複数の位置決定手順(301〜304)のうちの1つを選択し、そして該選択された位置決定手順(301〜304)に基づいて該ナビゲーションデバイス(100)の該位置を決定するように適合される、ナビゲーションデバイス。
(項目8)
上記ナビゲーションデバイス(100)は、上記項目のいずれかに記載の方法を行うように適合される、上記項目のいずれかに記載のナビゲーションデバイス。
(項目9)
上記ナビゲーションデバイス(100)は、モバイルパーソナルナビゲーションデバイスまたは乗り物のナビゲーションデバイスを含む、上記項目のいずれかに記載のナビゲーションデバイス。
【0013】
(摘要)
本発明は、ナビゲーションデバイス(100)の位置を決定するための方法に関する。ナビゲーションデバイス(100)は、複数の異なる位置決定手順(301〜304)に基づいてナビゲーションデバイス(100)の位置を決定するように適合される。各位置決定手順(301〜304)は、所定のパラメータセットを用いて働く。複数の地理的エリア(A〜C)が提供され、各地理的エリア(A〜C)は、位置決定手順(301〜304)のうちの1つに関連付けられる。ナビゲーションデバイス(100)の近似的位置が決定され、この近似的位置に基づいて、ナビゲーションデバイス(100)が位置している地理的エリア(A〜C)が決定される。決定された地理的エリア(A〜C)に基づいて、複数の位置決定手順(301〜304)のうちの1つが選択され、選択された位置決定手順(301〜304)に基づいて、ナビゲーションデバイス(100)の位置が決定される。
【0014】
ここで、本発明の実施形態は、添付の図面を参照してより詳細に説明される。
【図面の簡単な説明】
【0015】
【図1】図1は、本発明の実施形態に従うナビゲーションデバイスの概略図を示す。
【図2】図2は、本発明の実施形態に従う方法のステップを含むフローチャートを示す。
【図3】図3は、複数の地理的エリアおよび関連付けられた位置決定手順を示す。
【発明を実施するための形態】
【0016】
(好ましい実施形態の詳細な説明)
以下において、本発明の代表的な実施形態がより詳細に説明される。以下の説明が本発明の原理を例示する目的のみのために与えられ、限定の意味を取り入れるべきではないことが理解されなければならない。むしろ、本発明の範囲は、添付の請求範囲のみによって規定され、本明細書の後の代表的な実施形態によって限定されるように意図されない。
【0017】
他に特別に注意される以外に、本明細書において説明されるさまざまな代表的な実施形態の特徴が互いに組み合わせられ得ることが理解されるべきである。しかしながら、複数の特徴を有する実施形態を説明するのは、他の実施形態がより少ない特徴および/または代替的な特徴を含み得るので、その全部の特徴が本発明を実施するのに必要であることを示すように解釈されるべきではない。
【0018】
図1は、受信器102、処理ユニット103およびメモリ104と接続される位置決定ユニット101を含むナビゲーションシステム100を示す。ナビゲーションデバイス100はさらに、ディスプレイ、キーパッド、拡声器および簡潔の理由のために示されていない他の部品を含み得る。受信器102は、衛星ベースの位置決定システム105、モバイル通信ネットワークベースの位置決定システム106および/または電子料金収集ベースの位置決定システム107からの位置決定情報を受信するように適合され得る。位置決定ユニット101はさらに、ナビゲーションデバイス100が取り付けられる乗り物のセンサーに結合され得る。センサーは、例えば、乗り物の現在の速度または乗り物が移動する距離を示す回転速度計、乗り物の現在のステアリング角を示すステアリング角センサー、乗り物が上または下へ走行する傾斜角を示す傾斜角センサー、乗り物の本体の回転を示すジャイロセンサー、および乗り物の現在の加速度を示す加速度センサーを含み得る。
【0019】
ここで、ナビゲーションデバイス100の動作が、図2および図3に関連してより詳細に説明される。
【0020】
ステップ201において、ナビゲーションデバイス100の大まかまたは近似的位置が決定される。例えば、近似的位置は、衛星全地球位置決定システム(GPS)105、モバイル通信システム106、例えば乗り物が料金収集ブリッジを通過する場合の電子料金収集システム107に基づいて決定され得、または事前に決定された位置、および回転速度計の信号および/または乗り物のステアリング角の信号に基づいて、または乗り物またはナビゲーションデバイス100に提供される加速度センサーに基づいて決定されたオフセットに基づいて決定され得る。
【0021】
ステップ202において、決定された近似的位置は、ナビゲーションシステムが位置している地理的エリアを決定するために使用される。例えば、図3に示されるように、ナビゲーションデバイス100のルーティングエリア300のマップ、例えば、国家、大陸または全世界は、特定の地理的エリアA、BおよびCを提供し得る。もっと多くのエリアが提供されるが、しかしながら簡潔な理由のために、図3において、3つのエリアのみが示される。さらに、ルーティングエリア300のいくつかのエリアは、図3に書いていないエリアによって示されるような特定の地理的エリアに割り当てられない場合もある。従って、決定された近似的位置に基づいて、ステップ202において、ナビゲーションデバイスが、領域A、領域B、領域Cまたは領域A〜C以外に位置しているかを決定される。ステップ203において、決定された地理的エリアまたは領域に関連付けられる位置決定手順が選択される。図3に示されるように、4つの位置決定手順301〜304が提供される。位置決定手順301が地理的エリアAに関連付けられ、位置決定手順302が地理的エリアBに関連付けられ、そして位置決定手順303が地理的エリアCに関連付けられる。初期位置決定手順304が提供され、そしてルーティングエリア300の残りのエリアのために使用されるべきである。位置決定手順は、ナビゲーションシステムの位置を決定するために使用されなければならないソフトウェアの特定の部分を含み得、または市販のソフトウェアによって使用されなければならない特定のパラメータセットを含み得る。しかしながら、特定のソフトウェアおよび特定のパラメータセットさえが組み合わせて使用され得る。ステップ204において、近似的位置より正確であるナビゲーションデバイスの正確な位置は、選択された位置決定手順に基づいて決定される。
【0022】
図3に示されるように、乗り物が、例えば、領域Aに位置している場合に、選択された位置決定手順は、15%のGPS加重を使用し、5メートルのこの領域に対して車線幅を仮定し、そして30°の転回角度閾値を使用する。さらに、パラメータは、位置決定手順、例えば、位置決定システム、例えば、Galileoに基づいて他の衛星の位置決定情報を使用するための加重、モバイル電気通信ネットワークに基づいて位置決定情報を使用するための加重、または電子料金収集システムに基づいて位置決定情報を使用するための加重によって規定され得る。さらに、傾斜角センサーのための加重は、位置決定手順の部分であり得る。傾斜角に基づいて、2つの車線がごく平行に走っており、1つの車線が上へ行き、もう1つの車線が下へ行く場合に、乗り物がどちらの車線に走行するのを決定され得る。さらに、料金収集ブリッジを有する有料道路に走行する場合に、乗り物を監視し、かつ料金を収集するために、乗り物の正確な位置は、乗り物が料金収集ブリッジを通過する場合に決定され得る。さらに、2つの道路がごく平行に走っており、1つの道路が料金道路であり、もう1つの道路が料金フリーの道路である場合に、料金収集システムに基づいて乗り物が料金道路または料金フリー道路に走行するのかが決定され得る。
【0023】
ステップ202において、決定され得る特定の地理的エリアがあらず、図3の例において乗り物がエリアA〜Cにないことを意味する場合に、ステップ203において、初期位置決定手順304は、ステップ204において乗り物の正確な位置を決定するために選択される。
【0024】
従って、異なるエリア、特に都市において異なる位置決定手順およびパラメータを使用することによって、あるエリアにおいて典型的な位置決定問題に関する知識が、位置決定を向上するために利用され得る。例えば、1つの都市において、多くの車線に対して入口および出口を正しく検出するのが問題であり得、その一方で、他の都市において、分岐および付加の回り道において乗り物の正しい位置を検出するのが問題であり得る。車線の幅、車線の数、転回角の閾値、および前述のさらなるパラメータを考慮することによって、位置決定の精度が向上され得る。
【0025】
代表的な実施形態が上に説明されたが、さまざまな変更が他の実施形態においてインプリメントされ得る。例えば、ジャイロセンサーおよび傾斜センサーが、ナビゲーションデバイス100によって含まれ得、従って、向上された位置決定はまた、歩きまたはハイキングのために使用される手持ちのナビゲーションデバイス、または乗り物のセンサーに接続されていない乗り物において達成され得る。
【0026】
最後、前述の全部の実施形態は、添付の請求項によって規定されるので、本発明によって含まれるように考慮されることが理解されるべきである。既に強調されるように、前述の実施形態は、例示的な例としてのみ役に立ち、本出願の範囲は、これらの実施形態に限定されず、むしろ、本出願の範囲は、添付の請求項およびそれらの同等物によってのみ限定されることが意図される。
【符号の説明】
【0027】
A〜C 地理的エリア
300 ルーティングエリア
301〜304 位置決定手順
【特許請求の範囲】
【請求項1】
ナビゲーションデバイスの位置を決定する方法であって、該ナビゲーションデバイス(100)は、複数の異なる位置決定手順(301〜304)に基づいて該ナビゲーションデバイス(100)の位置を決定するように適合され、該方法は、
該複数の異なる位置決定手順(301〜304)を提供するステップであって、各位置決定手順(301〜304)は、所定のパラメータセットと共に作用する、ステップと、
複数の地理的エリア(A〜C)を提供するステップであって、各地理的エリア(A〜C)は、該位置決定手順(301〜304)のうちの1つの手順に関連付けられる、ステップと、
該ナビゲーションデバイス(100)の近似的位置を決定するステップと、
該ナビゲーションデバイス(100)の該近似的位置に基づいて、該複数の地理的エリア(A〜C)から、該ナビゲーションデバイス(100)が位置している地理的エリア(A〜C)を決定するステップと、
該決定された地理的エリア(A〜C)に基づいて、該複数の位置決定手順(301〜304)のうちの1つの手順を選択するステップと、
該選択された位置決定手順(301〜304)に基づいて、該ナビゲーションデバイス(100)の位置を決定するステップと
を含む、方法。
【請求項2】
前記所定のパラメータセットのうちの少なくとも1つのパラメータは、前記位置決定手順に対する位置決定情報を提供する位置決定情報ソース(105〜107)の加重を規定し、該加重は、該位置決定情報ソース(105〜107)に基づいて前記ナビゲーションデバイス(100)の位置を決定するための加重を規定する、請求項1に記載の方法。
【請求項3】
前記位置決定情報ソース(105〜107)は、衛星ベースの全地球位置決定システム(105)、ステアリング角センサー、回転速度計センサー、傾斜角センサー、ジャイロセンサー、モバイル通信ネットワークベースの位置決定システム(106)、および電子料金収集ベースの位置決定システム(107)からなるグループのうちの少なくとも1つを含む、請求項2に記載の方法。
【請求項4】
前記所定のパラメータセットのうちの少なくとも1つは、前記ナビゲーションデバイス(100)の前記位置を決定するために、前記位置決定手順(301〜304)によって使用されるべきである車線の幅、車線の数、および転回角の閾値を含むグループのうちの少なくとも1つを規定する、請求項1〜3のうちのいずれか一項に記載の方法。
【請求項5】
前記地理的エリア(A〜C)は、都市領域、村落領域、特定の都市、山の領域、平地領域、特定の国家、特定の地方領域、および特定の道路からなるグループのうちの少なくとも1つを含む、請求項1〜4のうちのいずれか一項に記載の方法。
【請求項6】
前記複数の異なる位置決定手順(301〜304)は、初期の位置決定手順(304)を含み、前記ナビゲーションデバイス(100)の前記近似的位置に基づいて決定され得る地理的エリア(A〜C)がない場合に、該ナビゲーションデバイス(100)の前記位置は、該初期の位置決定手順(304)に基づいて決定される、請求項1〜5のうちのいずれか一項に記載の方法。
【請求項7】
ナビゲーションデバイスであって、該ナビゲーションデバイスは、
複数の位置決定手順(301〜304)に基づいて該ナビゲーションデバイス(100)の位置を決定するように適合される処理ユニット(103)であって、各位置決定手順(301〜304)は、所定のパラメータセットと共に作用する、処理ユニットと、
該複数の位置決定手順(301〜304)、該所定のパラメータセット、および複数の地理的エリア(A〜C)を格納するためのメモリであって、各地理的エリア(A〜C)は、該位置決定手順(301〜304)のうちの1つに関連付けられる、メモリ(104)と、
該ナビゲーションデバイス(100)の近似的位置を決定するように適合される位置決定ユニット(101)と、
を含み、
該処理ユニット(103)はさらに、該ナビゲーションデバイス(100)の該近似的位置に基づいて該複数の地理的エリア(A〜C)から該ナビゲーションデバイス(100)が位置している地理的エリア(A〜C)を決定し、該決定された地理的エリア(A〜C)に基づいて該複数の位置決定手順(301〜304)のうちの1つを選択し、そして該選択された位置決定手順(301〜304)に基づいて該ナビゲーションデバイス(100)の該位置を決定するように適合される、ナビゲーションデバイス。
【請求項8】
前記ナビゲーションデバイス(100)は、請求項2〜6のうちのいずれか一項に記載の方法を行うように適合される、請求項7に記載のナビゲーションデバイス。
【請求項9】
前記ナビゲーションデバイス(100)は、モバイルパーソナルナビゲーションデバイスまたは乗り物のナビゲーションデバイスを含む、請求項7または8に記載のナビゲーションデバイス。
【請求項1】
ナビゲーションデバイスの位置を決定する方法であって、該ナビゲーションデバイス(100)は、複数の異なる位置決定手順(301〜304)に基づいて該ナビゲーションデバイス(100)の位置を決定するように適合され、該方法は、
該複数の異なる位置決定手順(301〜304)を提供するステップであって、各位置決定手順(301〜304)は、所定のパラメータセットと共に作用する、ステップと、
複数の地理的エリア(A〜C)を提供するステップであって、各地理的エリア(A〜C)は、該位置決定手順(301〜304)のうちの1つの手順に関連付けられる、ステップと、
該ナビゲーションデバイス(100)の近似的位置を決定するステップと、
該ナビゲーションデバイス(100)の該近似的位置に基づいて、該複数の地理的エリア(A〜C)から、該ナビゲーションデバイス(100)が位置している地理的エリア(A〜C)を決定するステップと、
該決定された地理的エリア(A〜C)に基づいて、該複数の位置決定手順(301〜304)のうちの1つの手順を選択するステップと、
該選択された位置決定手順(301〜304)に基づいて、該ナビゲーションデバイス(100)の位置を決定するステップと
を含む、方法。
【請求項2】
前記所定のパラメータセットのうちの少なくとも1つのパラメータは、前記位置決定手順に対する位置決定情報を提供する位置決定情報ソース(105〜107)の加重を規定し、該加重は、該位置決定情報ソース(105〜107)に基づいて前記ナビゲーションデバイス(100)の位置を決定するための加重を規定する、請求項1に記載の方法。
【請求項3】
前記位置決定情報ソース(105〜107)は、衛星ベースの全地球位置決定システム(105)、ステアリング角センサー、回転速度計センサー、傾斜角センサー、ジャイロセンサー、モバイル通信ネットワークベースの位置決定システム(106)、および電子料金収集ベースの位置決定システム(107)からなるグループのうちの少なくとも1つを含む、請求項2に記載の方法。
【請求項4】
前記所定のパラメータセットのうちの少なくとも1つは、前記ナビゲーションデバイス(100)の前記位置を決定するために、前記位置決定手順(301〜304)によって使用されるべきである車線の幅、車線の数、および転回角の閾値を含むグループのうちの少なくとも1つを規定する、請求項1〜3のうちのいずれか一項に記載の方法。
【請求項5】
前記地理的エリア(A〜C)は、都市領域、村落領域、特定の都市、山の領域、平地領域、特定の国家、特定の地方領域、および特定の道路からなるグループのうちの少なくとも1つを含む、請求項1〜4のうちのいずれか一項に記載の方法。
【請求項6】
前記複数の異なる位置決定手順(301〜304)は、初期の位置決定手順(304)を含み、前記ナビゲーションデバイス(100)の前記近似的位置に基づいて決定され得る地理的エリア(A〜C)がない場合に、該ナビゲーションデバイス(100)の前記位置は、該初期の位置決定手順(304)に基づいて決定される、請求項1〜5のうちのいずれか一項に記載の方法。
【請求項7】
ナビゲーションデバイスであって、該ナビゲーションデバイスは、
複数の位置決定手順(301〜304)に基づいて該ナビゲーションデバイス(100)の位置を決定するように適合される処理ユニット(103)であって、各位置決定手順(301〜304)は、所定のパラメータセットと共に作用する、処理ユニットと、
該複数の位置決定手順(301〜304)、該所定のパラメータセット、および複数の地理的エリア(A〜C)を格納するためのメモリであって、各地理的エリア(A〜C)は、該位置決定手順(301〜304)のうちの1つに関連付けられる、メモリ(104)と、
該ナビゲーションデバイス(100)の近似的位置を決定するように適合される位置決定ユニット(101)と、
を含み、
該処理ユニット(103)はさらに、該ナビゲーションデバイス(100)の該近似的位置に基づいて該複数の地理的エリア(A〜C)から該ナビゲーションデバイス(100)が位置している地理的エリア(A〜C)を決定し、該決定された地理的エリア(A〜C)に基づいて該複数の位置決定手順(301〜304)のうちの1つを選択し、そして該選択された位置決定手順(301〜304)に基づいて該ナビゲーションデバイス(100)の該位置を決定するように適合される、ナビゲーションデバイス。
【請求項8】
前記ナビゲーションデバイス(100)は、請求項2〜6のうちのいずれか一項に記載の方法を行うように適合される、請求項7に記載のナビゲーションデバイス。
【請求項9】
前記ナビゲーションデバイス(100)は、モバイルパーソナルナビゲーションデバイスまたは乗り物のナビゲーションデバイスを含む、請求項7または8に記載のナビゲーションデバイス。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−225900(P2012−225900A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2012−25689(P2012−25689)
【出願日】平成24年2月9日(2012.2.9)
【出願人】(504147933)ハーマン ベッカー オートモーティブ システムズ ゲーエムベーハー (165)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成24年2月9日(2012.2.9)
【出願人】(504147933)ハーマン ベッカー オートモーティブ システムズ ゲーエムベーハー (165)
【Fターム(参考)】
[ Back to top ]