
ナビゲーション・プロセッサ、該ナビゲーション・プロセッサを備えた処理構成、該ナビゲーション・プロセッサを備えた測定システム及び水中システムの位置及び姿勢を測定する方法

【課題】水中の装置の位置を測定するにつき、水中での音波の屈曲により測定値の不正確が生ずる。
【解決手段】音響アレイに音速メータを備え、音響アレイによる出力データを処理構成で計算して水中の装置の位置を求めるとともに、船の直下の流体層内の音の速度を音速メータで測定して、これにより、処理構成が水中の装置の位置の計算を補正して、正確な位置を検出する。
【解決手段】音響アレイに音速メータを備え、音響アレイによる出力データを処理構成で計算して水中の装置の位置を求めるとともに、船の直下の流体層内の音の速度を音速メータで測定して、これにより、処理構成が水中の装置の位置の計算を補正して、正確な位置を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はナビゲーション・プロセッサ、該ナビゲーション・プロセッサを備えた処理構成、該ナビゲーション・プロセッサを備えた測定システム、該ナビゲーション・プロセッサを用いて水中システムの位置及び姿勢を測定する方法に関する。
【背景技術】
【0002】
国際特許第99/61307号は、標的を水中標的位置に配備する装置に関し、装置には、音線を送信するビーコン、および水中標的位置に対して装置の配置を制御する複数のスラスタを設けた例を開示している。
【0003】
先行技術の装置が、例えば最大3,000メートル以上の深い海底で最大1000トン以上の負荷を配備および/または回収するのに使用されている。配備中に、装置は海面に浮かぶ船上の制御機器によって制御される。制御機器は、装置の正確な位置を可能な限り正確に知る必要がある。そのため、装置の板上にあるビーコンが、海水を通して船に音線を送信する。適切な音波受信器がこの音線を受信し、これを、船に対する装置の位置の計算に使用する電気信号に変換する。
【0004】
しかし、海水中で装置の深度が増加するにつれ、海水中での音波の屈曲により、位置測定の正確度が低下することが分かっている。
【発明の開示】
【発明が解決しようとする課題】
【0005】
したがって、本発明の目的は、海水中または他の流体中で使用中に、このような装置の位置測定の正確度をさらに向上させることである。さらに、このような位置測定がオンライン(実時間)で必要である。
【課題を解決するための手段】
【0006】
この目的を達成するため、本発明によれば、船舶上の、音響プロセッサ(224)と、表面位置決め機器DGPSにインターフェース接続されたナビゲーション・プロセッサ(202)であって、該ナビゲーション・プロセッサ(202)は、共通の座標系である第1の座標系における水中システム(50)の姿勢および絶対座標を計算するため、
i. 前記表面位置決め機器DGPSからの位置データ、
ii. 上下浮動、横揺れおよび縦揺れセンサを含む水中システム(50)上の光ファイバ・ジャイロコンパス(256)からのデータ、
iii. 水中システム(50)からの深度データ、
iv. 水中システム(50)上のドップラー・ログ・ユニット(266)に基づいての水中システム(50)の速度データ、
v. 前記音響プロセッサ(224)からの、システム(50)の距離及び方位データ
を受信するナビゲーション・プロセッサが提供される。
【0007】
また、本発明によれば、ナビゲーション・プロセッサ(202)と音響プロセッサ(224)を備え、該ナビゲーション・プロセッサ(202)は音響プロセッサ(224)と船舶(20)上の表面位置決め機器DGPSにインターフェース接続された処理構成で、
該ナビゲーション・プロセッサ(202)は、共通の座標系である第1の座標系における水中システム(50)の姿勢および絶対座標を計算するため、
i. 前記表面位置決め機器DGPSからの位置データ、
ii. 上下浮動、横揺れおよび縦揺れセンサを含む水中システム(50)上の光ファイバ・ジャイロコンパス(256)からのデータ、
iii. 水中システム(50)からの深度データ、
iv. 水中システム(50)上のドップラー・ログ・ユニット(266)に基づいての水中システム(50)の速度データ、
v. 前記音響プロセッサ(224)からの、システム(50)の距離及び方位データ
を受信し、前記ナビゲーション・プロセッサ(202)と音響プロセッサ(224)は1つ又は複数のコンピュータによって実現される、処理構成が提供される。
【0008】
また、本発明によれば、ナビゲーション・プロセッサ(202)と音響プロセッサ(224)と水中システム(50)を備える測定システムであって、該ナビゲーション・プロセッサ(202)は音響プロセッサ(224)と船舶(20)上の表面位置決め機器DGPSにインターフェース接続され、前記水中システム(50)は光ファイバ・ジャイロコンパスとドップラー・ログ・ユニットと深度センサを備え、前記光ファイバ・ジャイロコンパスは上下浮動、横揺れおよび縦揺れセンサを含み、該ナビゲーション・プロセッサ(202)は、共通の座標系である第1の座標系における水中システム(50)の姿勢および絶対座標を計算するため、
i. 前記表面位置決め機器DGPSからの位置データ、
ii. 上下浮動、横揺れおよび縦揺れセンサを含む水中システム(50)上の光ファイバ・ジャイロコンパス(256)からのデータ、
iii. 水中システム(50)からの深度データ、
iv. 水中システム(50)上のドップラー・ログ・ユニット(266)に基づいての水中システム(50)の速度データ、
v. 前記音響プロセッサ(224)からの、システム(50)の距離及び方位データ
を受信する測定システムが提供される。
【0009】
また、本発明によれば、船舶上の、ナビゲーション・プロセッサ(202)を用いて水中システム(50)の位置及び姿勢を測定する方法であって、共通の座標系である第1の座標系における水中システム(50)の姿勢および絶対座標を計算するため、
i. 前記表面位置決め機器DGPSからの位置データを受信するステップと、
ii. 上下浮動、横揺れおよび縦揺れセンサを含む水中システム(50)上の光ファイバ・ジャイロコンパス(256)からのデータを受信するステップと、
iii. 水中システム(50)からの深度データを受信するステップと、
iv. 水中システム(50)上のドップラー・ログ・ユニット(266)に基づいての水中システム(50)の速度データを受信するステップと、
v. 前記音響プロセッサ(224)からの、システム(50)の距離及び方位データ
を受信するステップとを備える方法が提供される。
【0010】
他の実施例は従属請求項に記載されている。
【0011】
以下で、図面を参照しながら本発明について詳細に説明する。図面は、本発明を例示するだけであって、その範囲を制限するものではなく、その範囲は添付の請求の範囲によってのみ規定される。
【0012】
(好ましい実施形態の説明)
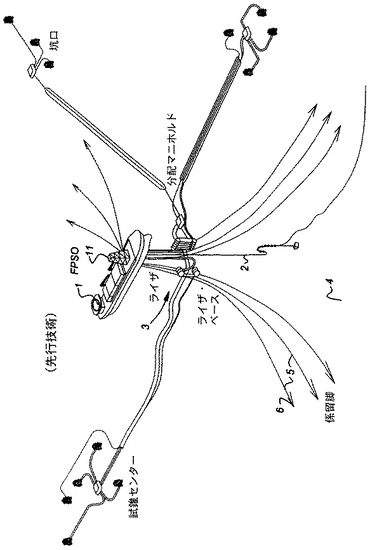
図1を参照すると、レイアウトは、ライザ2の起点である旋回式採集スタック11を伴うFPSO1を表し、前記ライザは海底4にあるライザ・ベース3に接続される。採集の寿命において、許容可能な動的偏位範囲内に留まることがFPSO1にとって最も重要であり、したがってFPSO1は、錨6によって、あるいはパイルによって保持される係留脚5によって海底4に係留される。
【0013】
採集船1によって石油またはガスを採掘するには、幾つかの比較的重い物体を高い正確度で海底4に配置する必要がある。
【0014】
係留脚5によって適切で安全な錨を固定するには、その係留脚5がほぼ同じ長さを有する必要がある。この用途では、実際には50トン以上の重量の錨を使用することができ、これを数メートル以内の正確度で海底4に配置する。さらに、錨6自体が非常に重いばかりでなく、錨6に取り付けた係留脚も、錨6自体の重量の数倍に等しい重量を有する。
【0015】
また、「テンプレート」、「重力ライザ・ベース」、「採集マニホルド」など、他の物体も、比較的高い正確度で海底4に配置する必要がある。
【0016】
図1に図示され、海で石油およびガスの採掘に必要であり、海底に配置しなければならない物体は、非常に重量があるばかりでなく、非常に高価でもある。
【0017】
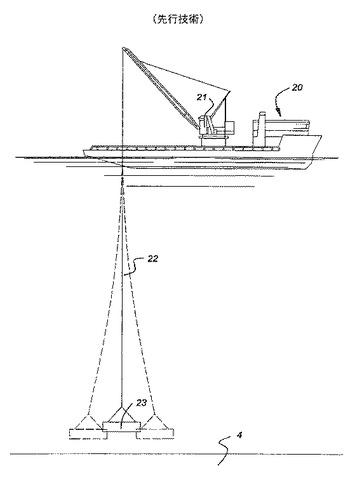
図2は、先行技術の船舶20を示し、自身上にクレーン21のような巻き上げ手段を有する。クレーン21には巻き上げワイヤ22を設け、これによって物体または負荷23を海底4に配置することができる。負荷23を配置するためには、表面支持体をクレーン21とともに移動させる必要がある。
【0018】
その結果、任意の時に負荷23の慣性が克服されるが、負荷23の加速のため、制御不可能な状況が発生し、それによって標的区域を飛び越してしまう。巻き上げワイヤ22および負荷23は海流などの影響を受けやすいという事実から、巻き上げワイヤ22を下降させた場合、負荷23は下方向に直線移動しない。船舶20の上下浮動、横揺れおよび縦揺れも、達成できる正確度にマイナスの影響を与える。
【0019】
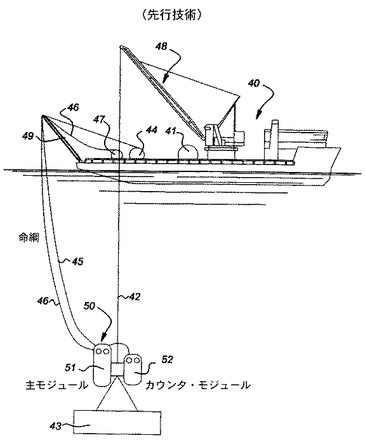
図3は、海底4に負荷43を配備する水中装置またはシステム50を設けたクレーン船40を示す。船舶40は、第1巻き上げワイヤ42を設けた第1巻き上げ手段、例えばウィンチ41を備える。この巻き上げワイヤ42によって、例えばテンプレートなどの負荷43を海底に配備し、配置することができる。
【0020】
上述したように、浮採集プラットフォームを使用する油田およびガス田の採掘では、海底4に幾つかの重い物体を配置する必要があり、さらに物体を非常に高い正確度で海底4に配置しなければならない。現今は採掘を深い所でしなければならず、最大で3000m以上にもなり、必要な正確度を達成することがさらに困難になっている。例えば、解決すべき問題の一つは、巻き上げワイヤ42が担持する負荷43に発生し得る回転である。
【0021】
配備時に負荷43の位置を制御し、必要な正確度以内で負荷43を海底4に配置できるようにするため、装置またはシステム50は吊り上げワイヤ42に固定されている。システム50の好ましい実施形態を、図4、図5、図6aおよび図6bに関して説明する。
【0022】
システム50は吊り上げワイヤ42の端部に係合してよい。あるいは、システム50は負荷43自体に直接係合してよい。システム50は、スラスタ56(i)(i=1、2、3・・・IでIは整数である)などの駆動手段を設けた第1または主モジュール51を備える(図4および図5)。システムはさらに第2またはカウンタ・モジュール52を備える。このカウンタ・モジュール52にもスラスタ56(i)を設ける。使用時には、主モジュール51およびカウンタ・モジュール52のスラスタを吊り上げワイヤ42の対向する側に配置する。
【0023】
システム50は第2吊り上げワイヤ45によって船舶40に結合される。このワイヤ45は例えば第2ウィンチ44などの第2巻き上げ手段を使用して操作することができる。第2巻き上げワイヤ45は、例えばAフレーム49によって船外へ設置される。第2ウィンチ44および第2巻き上げワイヤ45は通常、それぞれ第1巻き上げ手段48および第1巻き上げワイヤ42より軽量である。システム50はさらに命綱46によって船舶40に接続される。この命綱46は巻き上げワイヤ45に取り付けるか、第3ウィンチ47から別個に下降させることができる。システム50に動力を提供する供給電力配線、さらに電気配線または光ファイバを、例えば命綱に収容する。システム50には、通常、電力を流体動力に変換する手段を設ける。したがって、流体動力は、制御に、つまりスラスタ56(i)および補助工具の快適装備に使用される。
【0024】
最近、作業の深度が増加しているので、負荷43および長い巻き上げワイヤ42の捻れおよび回転の問題が重大になってくる。重い負荷43を巻き上げワイヤ42の下側に取り付けるので、このような捻れおよび回転が巻き上げワイヤをかなり摩耗させることになり、巻き上げワイヤに深刻な損傷が発生することがある。この摩耗は、巻き上げワイヤ42が破損し、負荷43が喪失するほど深刻になることがある。別の問題は、ワイヤの多大な捻れのため、船舶にあるワイヤがシーブから外れることがあることである。
【0025】
主モジュール51およびカウンタ・モジュール52それぞれのスラスタ56(i)を吊り上げワイヤ42の対向する側に配置するという事実から、巻き上げワイヤ42には両方向に逆トルクがかかる。この方法で、システムにより捻れ防止器具が形成される。この捻れ防止器具の能力を改善するため、主モジュール51とカウンタ・モジュール52間の距離を変更できることが好ましい。
【0026】
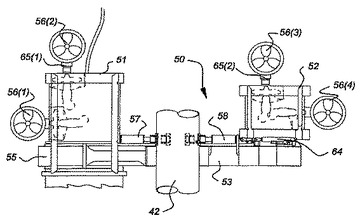
図4は、海底4に負荷43を配備するシステム50に可能な実施形態の詳細な概要図を示す。図5は、図4によるシステムを上から示す。
【0027】
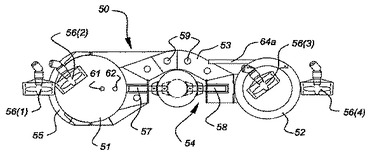
システム50は、主モジュール51、カウンタ・モジュール52およびアーム53を備える。アーム53は主モジュール51から取り外すことができる。つまり、主モジュール51はモジュール式システムとして別個に使用することもできる。アーム53には窪み54を設ける。この窪み54の対向する側に2つのジャッキ57、58を設け、その少なくとも一方は他方に対して移動することができる。これらのジャッキ57、58の端面の間で、負荷43のクレーン・ブロックなどの物体又はケーブル42を締め付けることができる。ジャッキ57、58と物体間の接触を改善するため、ジャッキの個々の端部に、専用ゴムなどの高い摩擦材料からの摩擦要素でライニングを施した締め付けシューを設ける。
【0028】
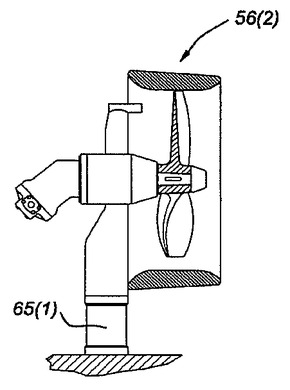
使用時には、スラスタ56(i)を使用して、海底4の標的区域に対してシステム50を配置することができる。スラスタ56(i)は、主にシステム50の内側にある第1位置から、スラスタがシステム50から突き出した位置へと順次作動させるようにすることができる。2つの上部スラスタ56(2)、56(3)は、水中システム50に対して回転可能である。これは、例えば個々の回転式アクチュエータ65(1)、65(2)に設置する。その目的については以下で説明する。スラスタ56(2)は、図4aでは拡大して図示されている。
【0029】
図5には、主モジュールを第2吊り上げワイヤ45および/または命綱46に接続するには、主モジュール52の頂部に2つの位置61、62があることが図示されている。主モジュール51を別個に使用する場合は、位置61を使用することができる。主モジュール61は、モジュール61を配備する時に、空中でも水中でもバランスをとる。
【0030】
システム50を使用する場合、船舶40とシステム50との接続は、システムを空中と水中の両方で平衡に維持するために位置62に固定される。システムのバランスを改善するため、補助釣合錘55をシステム50に固定することができる。
【0031】
使用時には、装置50には浮力がない。水中におけるシステムの可動性を改善するため、アーム53には、下降中に圧力増加による構造的損傷を回避し、採集段階では迅速な排水を保証するために穴59を設ける。
【0032】
上述したように、主モジュール51に対してカウンタ・モジュール52を移動できると有利である。これは、ジャック64aを使用することによって達成できる。
【0033】
モジュール51は外フレームおよび内フレーム(両方とも図示せず)を備える。内フレームは円筒形であることが好ましい。外フレームを内フレームに接続することにより、非常に強力な構造を達成することができる。構造の強度は、システムの時期尚早の疲労を回避するために必要である。
【0034】
モジュール51は、例えば部分的に高張力鋼で作成し、それによって第1巻き上げワイヤ42または第2巻き上げワイヤ45の一体部品として使用するよう設計される。つまり、モジュール52の上側が巻き上げワイヤ45の第1部分に接続され、モジュール51の下側が巻き上げワイヤ45の第2部分に接続されるか、モジュール51の下側が負荷に直接取り付けられる。この方法で、巻き上げワイヤにかかる負荷がモジュール51を通して伝達される。
【0035】
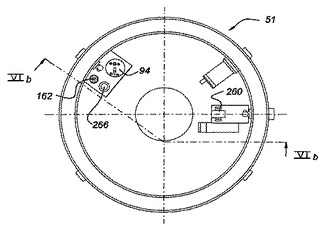
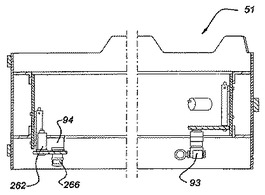
前述したように、モジュール51には、命綱46を通って送出された電力を流体動力に変換するため、スラスタ・ドライブ270を設ける。このスラスタ・ドライブ270はモータ、ポンプ、マニホルドおよび液圧リザーバを備えることができる。このような変換手段は当業者には知られ、本明細書でさらに説明する必要はない。絶対位置と他の物体に対する相対位置との両方で、その位置に関する該当データを制御システムおよび/または船舶40上のオペレータに通信するため、モジュール51は、さらに、以下で詳細に説明するセンサ手段および制御手段を備える。モジュール51は、センサ接続箱を装備する。さらに、モジュール51は光源87、上下浮動、横揺れおよび縦揺れセンサを含むジャイロコンパス256、パンあおりカラー・カメラ97、ディジクォーツ深度センサ253を含むUSBL応答器255、音速メータ258、およびソナーダイン・ミニ・ロヴナヴ264を備える。モジュール51の下側には、幾つかのプラットフォーム光源94、パンおよびS.I.T.カメラ93、高度計262、ドップラー・ログ・ユニット266、および二重ヘッド・スキャニング・ソナー260が装着される。これらは、使用時にその下に透明な海水のみがあるよう設置される。これらは、図6aおよび図6bに概略的に図示される。これはどこにでも、例えばモジュール52の下側にでも配置してよいことを理解されたい。さらに、ロード・セル268はシステム51の一部である。これらの構成要素は全て、図7bに概略的に図示される。
【0036】
上述したように、負荷が所期の深度に到達したら、必要な正確度を達成するには、高解像度のソナー機器260をドップラー・ログ・ユニット266で測定した距離ログとともに使用することが重要である。ソナー機器260は、海底に配置された少なくとも1つの物体に対する位置を判断するために使用される。距離ログを使用すると、大きい半径内でセンチメートルのオーダーの正確度を達成しながら、海上支援からの位置決め動作を、さらにLBL(長基線)アレイ(または他のUSBLなど)のような他の音響応答器装置からの位置決め動作から解離することが可能になる。
【0037】
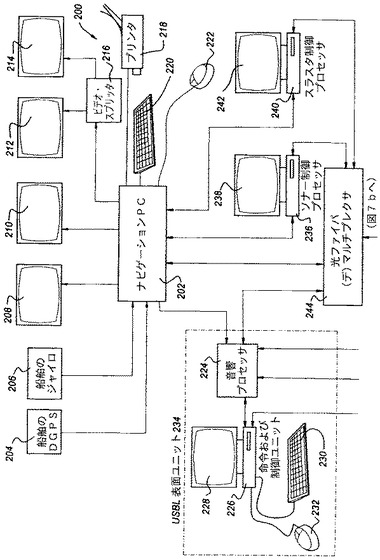
図7aは、船舶40に設置された電子機器200を示し、図7bは音速メータ248およびジャイロコンパス252を伴う配備可能な音響アレイ250を示す。図7bは、水中システム50に設置した水中電子機器249も示す。
【0038】
図7aに示す機器は4つのプロセッサを備える。つまりナビゲーション・プロセッサ202、音響プロセッサ224、ソナー制御プロセッサ236、およびスラスタ制御プロセッサ240である。ナビゲーション・プロセッサ202は、相互通信および相補性のために他の3つのプロセッサ224、236、240とインターフェースをとる。
【0039】
ナビゲーション・プロセッサ202は、表面位置決め機器DGPS(相対全地球測位システム)204、船舶のジャイロコンパス206、4つのディスプレイ・ユニット208、210、212、214、プリンタ・ユニット218、キーボード220、マウス222、光ファイバ・(デ)マルチプレクサ・ユニット244ともインターフェースをとる。必要に応じて、ナビゲーション・プロセッサ202の1つのSVGA信号出力を2つ以上のディスプレイ・ユニットに送信するため、ビデオ・スプリッタ216を設けてもよい。図7aでは、ディスプレイ・ユニット212、214はビデオ・スプリッタ216を介してナビゲーション・プロセッサ202に接続される。
【0040】
光ファイバ(デ)マルチプレクサ・ユニット244は、音響プロセッサ224、ソナー制御プロセッサ236、およびスラスタ制御プロセッサ240にも接続される。
【0041】
音響プロセッサ224はコマンドおよび制御ユニット226に接続され、これはキーボード230、マウス232およびディスプレイ・ユニット228に接続され、これが全てまとめてUSBL表面ユニット234を形成する。
【0042】
音響プロセッサ224は、運動センサ・ユニット252および速度メータ248を伴う配備可能な音響アレイ250に接続される。使用時には、音響アレイ250は船舶40のキールの2.5メートル下に装着することが好ましい。
【0043】
光ファイバ・(デ)マルチプレクサ・ユニット244が、さらに、水中システム50に設置された光ファイバ・(デ)マルチプレクサ246に接続される。両方の光ファイバ・(デ)マルチプレクサ244、246を相互接続する光ファイバは、命綱46に収容することが好ましい(図3)。
【0044】
ソナー制御プロセッサ236はディスプレイ・ユニット238に接続される。スラスタ制御プロセッサ240はディスプレイ・ユニット242に接続される。
【0045】
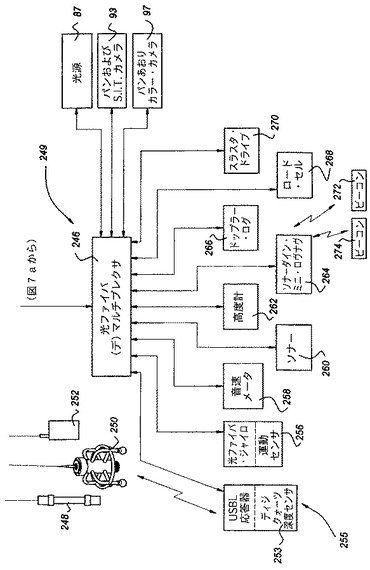
水中機器249は、図7bではブロック図の形態で図示される。ディジクォーツ深度センサ253を伴うUSBL応答器255、運動センサ256を伴うジャイロコンパス、(着脱式)音速メータ258、二重ヘッド・スキャニング・ソナー260、高度計262、ソナーダイン・ミニ・ロヴナヴ264、ドップラー・ログ266、ロード・セル268、およびスラスタ・ドライブ・コントロール270が全て光ファイバ・(デ)マルチプレクサ246に接続される。
【0046】
さらに、図7bは、海底に、または配備すべき負荷に(または海底に既にある構造に)設置できる2つのビーコン272、274を示す。これらのビーコン272、274は、例えばソナーダイン・ミニ・フォヴナヴ264(または同等の機器)により問い合わせるものであり、音響信号をシステム50に送り返すことができ、これをシステム50自体が使用して、これらのビーコンに対する距離および方位を判断し、測定することができる。このような音響遠隔測定リンクの結果、非常に高精度の相対位置測定ができる。このようなビーコンの数は、図7bに示す2個に制限されない。
【0047】
機能
図7aおよび図7bに示す構成要素の機能は次の通りである。
【0048】
ナビゲーション・プロセッサ202は、船舶の姿勢およびその固定オフセットを計算するため、海上の位置決め機器のデータ(DGPS受信器、DGPS補正、船舶のジャイロコンパスおよび船舶の運動センサ204および206)を収集する。
【0049】
ナビゲーション・プロセッサ202は、光ファイバ・(デ)マルチプレクサ244および246を介して、システム50のナビゲーション計器、つまりドップラー・ログ266、高度計262、およびジャイロコンパスおよび運動センサ256に様々な設定を送信する。設定後、これはこれらの計器からデータを受信し、さらに音響プロセッサ244を介してシステム50の距離/方位および深度データを受信し、システムの姿勢および絶対座標を計算して表示する。
【0050】
ナビゲーション・プロセッサ202の統合ソフトウェアが開発されており、これにはシステム50の初期の方向を決定し、多くの中間地点から選択して、初期の位置決めを実行するため、手動または自動モードで作業することができる動的位置決めコントローラ・ソフトウェアを含む。さらに、船上のオペレータは選択された中間地点に対するオフセットを入力することができ、オフセットは、システム50の方向に対するXY座標で入力される。位置を安定させ、フィルタリングするため、ディスプレイ・ユニット208〜214の画面(電子ページ)上にある特別設計のウィンドウの構成を介して幾つかの他のタイプの海中位置決め装置を選択するという、別の可能性もある。オペレータが最適な結果を獲得するために可能な限り多くの手段を有することを保証するため、ソフトウェアのその他の部分ではシステム50の位置をオンライン(実時間)で計算するために使用中の海中計器の様々な状態を示すようになっている。
【0051】
システム50上の上下浮動、横揺れおよび縦揺れセンサ88を含む搭載ジャイロコンパス256は、海底に設置されるシステム50および負荷43両方の正確な姿勢に関するデータを提供する。海面では、制御バン内でオペレータが、下降中に、しかし負荷43が最終検証のために海底に配置されてからも、これらの姿勢をオンライン(実時間)でチェックすることができる。
【0052】
船舶のジャイロコンパス206、さらに同じ機能のために使用できる音響アレイに設置した運動センサ252を伴うジャイロコンパスは、船舶の方向をナビゲーション・プロセッサ202に送信する。ナビゲーション・プロセッサ202はこの船舶の方向を使用して、様々なオフセットを計算する。
【0053】
ディスプレイ・ユニット208、210、212および214はそれぞれ、制御バン内でオペレータのためにおよび海洋部門オペレータ用船橋上にある別の人のために、ナビゲーションの設定、海底の眺め、海面の眺めを表示するよう構成される。
【0054】
USBL命令および制御ユニット226は、システムの制御および構成を提供し、オペレータが制御するためのマン・マシン・インターフェースを表示するパーソナル・コンピュータで構成される。
【0055】
音響プロセッサ224は、受信信号、深海速度測定および船舶の姿勢で相関プロセスを実行する1つのVMEラックで構成される。さらに、これは使用するビーコンの座標を計算する。音響プロセッサ224は、イーサネット(登録商標)を通してナビゲーション・プロセッサ202に連結される。
【0056】
音響アレイ250は、送信および受信手段を含む。また1つまたは複数のビーコンと音響通信する変換器として使用することができる。このような変換器のモードは、命綱46が故障し、呼び掛け信号をシステム50へと送信できない場合に有用である。これで、音響呼び掛け信号は海水を通して変換器から直接送信することができる。他の全てのケースで、音響アレイ250は受信モードで使用される。受信は、音響アレイ250に対するビーコンの距離および方位角を測定する2つの直交受信ベースで実行される。各受信ベースは2つの変換器を含む。各受信信号は、ディジタル信号処理のため、増幅され、フィルタリングされて、音響プロセッサ224に転送される。
【0057】
音響アレイ250に設置された音速メータ248は、船舶40のすぐ下にある重要で不安定な音速プロファイルを実時間で更新している。これは、船舶40のすぐ下にあるこれらの層では海水の乱流が非常に激しいようであるので非常に重要である。
【0058】
ジャイロコンパス252は、海中のシステム50の位置に関するデータを修正するため、音響プロセッサ224に音響アレイの姿勢を送信する運動センサ・ユニットとして使用することが好ましい。
【0059】
好ましい実施形態では、ビーコン274は応答器モードで作業し、以下の特徴を有する。
−音響プロセッサ224が生成する呼び掛け開始信号は音響信号ではなく電気信号で、船舶40とシステム50間のケーブル・リンクを通してビーコン274に送信される。
−呼び掛け頻度は、マン・マシン・インターフェースを通してオペレータにより遠隔制御される。
【0060】
上述したように、ビーコン274は応答器モードで使用することもできる。これで、ビーコン274は、音響アレイ250が送信した表面音響信号によって作動し、次にコード化音響信号を通して音響アレイ250に音響応答信号を送出する。
【0061】
ビーコン274に含まれるディジクォーツ深度センサ253によって、システム50の非常に正確な深度データを音響プロセッサ224に送信することができる。音響プロセッサ244はこれらのデータを使用し、システム50の海中位置およびその負荷の計算を改善する。
【0062】
海中システム50に搭載された音速メータ258は、下降および回収中に、海中システムの深度における海水中の音速に関するデータを音響プロセッサ224に送信する。音速データは、深度の関数として計算された海水中の音速プロファイルを更新して、海水中の深度の関数としてこれらのプロファイルから音線の屈曲を計算し、したがってシステム50の海中位置の計算を補正するために使用される。
【0063】
二重ヘッド・スキャニング・ソナー260は、海底の人工または天然の標的までのシステム50の距離および方向を測定し、対応するデータをディジタル値としてナビゲーション・プロセッサ202に出力するために使用される。このような人工または天然の標的の位置を予め画定するか、ナビゲーション・システムが選択された標的それぞれに座標を割り当てることができる。物体に座標を与えた後、これを局所座標系のナビゲーション基準として使用することができる。その結果、相対座標の正確度が0.1メートルになる。
【0064】
システム50に装着された高度計262は、水中システム50から海底までの垂直距離を測定し、出力測定データを音響プロセッサ224に送信する。
【0065】
ドップラー・ログ・ユニット266は、水中システム50の深度における海水流の値および方向に関するデータを提供する。これらのデータは2つの方法で使用される。
【0066】
まず第1に、ドップラー・ログ・ユニット266および運動センサ266付きジャイロコンパスから受信したデータは、音響プロセッサ224が、USBLの使用に関するランダム・ノイズをオンライン(実時間)で平滑化するのに使用する。このような平滑化を獲得するため、例えばカルマン・フィルタ、サロモンセン・フィルタ、サロモンセン光フィルタ、または他の適切なフィルタなど、フィルタを主プロセッサ・ユニット224内で使用する。このようなフィルタは当業者には知られている。付録Aに簡単な要約を示すことができる。
【0067】
第2に、海流の強度、海流の方向に関するドップラー・ログ・ユニット266の出力データは、水中システム50の現在の方向および所期の方向に関するデータとともに、ナビゲーション・プロセッサ202を介してスラスタ制御プロセッサ240に送信される。所期の方向に基づき、スラスタ・ドライブ・コントロール270は自動的に制御される。手動制御も提供することができる。
【0068】
非常に有利な実施形態では、ドップラー・ログ・ユニット266(または他の適切なセンサ)を使用して、システム50を取り巻く海水の温度および/または塩分を測定する。局所的温度および/または塩分に関するデータはナビゲーション・プロセッサ202に送信され、これは海水の深度の関数として温度および/または塩分を計算し、更新する。これらのデータは、海水を通る音波の屈折を判断し、したがってシステム50の位置の計算を補正するのにも使用される。
【0069】
ソナーダイン・ミニ・ロヴナヴ264はオプションであり、上記で説明したように海底の局所的ビーコンに対するシステム50の相対位置を提供するために使用することができる。例えば、長基線(LBL)アレイは、既に海底に設置し、その目的で使用することができる。
【0070】
ロード・セル268は、水中システム50と係合した状態の負荷43の重量を測定するのに使用される。この重量が減少した場合、これは負荷が現在、海底(または他の標的位置)に配置され、システム50を負荷43から取り外せることの指標である。ロード・セルからの出力データは、(デ)マルチプレクサ244、246を通してナビゲーション・プロセッサ202に送信される。
【0071】
スラスタ・ドライブ・コントロール270は、以下で詳細に説明するように、水中システム50を所望の位置に運ぶため、スラスタ56(i)を駆動するのに使用する。
【0072】
図7aでは、4つの異なるプロセッサ202、224、236および240が本発明によるシステムの機能を実行するよう図示されている。しかし、システムは代替的に、パラレルまたはマスター・スレーブ構成の1つのメイン・フレーム・コンピュータを含め、他の適切な数の協働するプロセッサで実行できることが理解される。遠方に配置したプロセッサを使用してもよい。機能の一部を実行するため、水中システム50上にプロセッサを設けてもよい。
【0073】
プロセッサは、ハード・ディスク、リード・オンリー・メモリ(ROM)、電気的に消去可能なプログラマブル・リード・オンリー・メモリ(EEPROM)およびランダム・アクセス・メモリ(RAM)などを含むメモリ・コンポーネントを含むが、積極的に図示していない。これらのメモリ・タイプの全てを必ずしも設ける必要はない。
【0074】
キーボード220、230およびマウス222、232の代わりに、またはそれに加えて、タッチ・スクリーンなどの当業者に知られた入力手段も設けることができる。
【0075】
図示の構成全体内の通信はいずれも無線でよい。
【0076】
図5には、上スラスタ56(2)および56(3)がスラスタ56(1)および56(4)とは別の方向に配向された状態が図示される。スラスタ56(2)、56(3)は回転式アクチュエータ65(1)、65(2)に装着され、それにより、スラスタ56(2)、56(3)を最大360°回転して、これを方向転換することができる。スラスタ56(2)、56(3)は、それぞれが異なる方向に配向できるよう、別個に制御できることが好ましい。
【0077】
スラスタ制御プロセッサ240が水中システム50を正確に配置できるため、ナビゲーション・プロセッサ202とスラスタ制御プロセッサ240の間に共通の座標系を確立しなければならない。まず第1に、ナビゲーション・プロセッサ202が使用する標準的な座標系がある。しかし、水中システム50には2つの他の座標基準系を確立することが好ましい。
【0078】
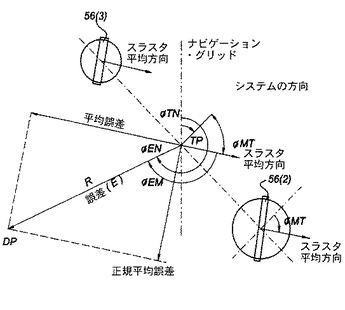
図8は3つの異なる座標系を示す。ナビゲーション・プロセッサ202に関する座標系は、「ナビゲーション・グリッド」で示される。この座標系はこの「ナビゲーション・グリッド」の方向およびその垂線を使用する。
【0079】
スラスタ56(2)、56(3)は、「スラスタ平均方向」と呼ばれる方向に駆動力を提供するよう制御される。この方向は垂線とともに第2座標系を画定する。
【0080】
第3座標系は「システム方向」に対して画定され、これはスラスタ56(1)、56(4)を相互接続する線に直角の方向として定義される。
【0081】
これで、水中システム50が辿る経路の誤差は、「平均誤差」と呼ばれるスラスタ中間方向に平行な1つの成分と、「垂線平均誤差」と呼ばれるスラスタ中間方向に直角の成分とに分割できる誤差ベクトルに関して定義することができる。水中システム50の適切なセンサは、ナビゲーション・プロセッサ202にスラスタ中間方向およびシステム方向を提供する。これらのデータから、ナビゲーション・プロセッサ202は図8に示すようなグリッドを生成する。
【0082】
誤差は、所望の位置DPからシステム位置TPを引いた値と定義され、したがってナビゲーション・グリッド基準に対してベクトルRΦENが生成される。つまり下式になる。
DP−TP=RΦEN
さらに、
ΦTNはシステム方向からナビゲーション・グリッドの方向を引いた値であり、
ΦMTは平均スラスタ方向からシステム方向を引いた値である。
これで次式になる。
DP−TP=RΦEM,ΦEM=ΦEN−(ΦTN+ΦMT)
これでRΦEMが分かるので、平均値および平均誤差の垂線を計算することができる。
【0083】
2つのスラスタ56(1)および56(4)を使用して、吊り上げケーブル42によって与えられた捻り力、機器の抗力および位置決め制御装置の方向転換によって誘発される回転モーメントを打ち消す。方向の制御ループには、ナビゲーション・プロセッサ202に実際のシステム方向および所望のシステム方向を提供する必要がある。実際のシステム方向は、ジャイロコンパス256によって測定される。所望の方向はオペレータが手動で入力する。これらの2つの方向から、ナビゲーション・プロセッサ202の制御ループが、必要な方向と実際の方向間の角距離を、さらにそれに従ってシステム50を移動するのに必要な回転方向を計算する。次に、スラスタ制御プロセッサ240が制御する単純な制御ループが、スラスタ56(1)および56(4)への動力を調節し、システム50を適切に回転する。
【0084】
システム50に電源投入すると、スラスタの平均方向がシステム方向に平行に配向されるよう、両方のスラスタ56(2)および56(3)を配向することが好ましい。次に、スラスタ56(2)、56(3)に、システム方向からの小さいベクトル角度偏差が与えられ、システム50の2つの面における位置決めを補助する。このベクトルのサイズは、好ましくは手動で調節可能であり、実際の海の状態に応じて異なる各作業に応じて構成する必要があることがある。スラスタ56(2)および56(3)をセンタリングし、方向転換したら、位置決めループがシステム50の制御を引き継ぐことができる。
【0085】
位置決めループはさらに2つの位相を備える。
【0086】
システム50がまだ海面付近にある間に実行される第1の次の位相では、海流方向がドップラー・ログ・ユニット266によって測定される。海流方向はナビゲーション・プロセッサ202に送信される。この方向を使用して、ナビゲーション・プロセッサ202から適切な命令を受信するスラスタ制御プロセッサ240は、スラスタ平均方向がほぼ海流方向と反対になるよう、回転式アクチュエータ65(1)、65(2)を駆動する。このように回転式アクチュエータ65(1)、65(2)が回転している間、スラスタ56(i)のいずれにも動力が供給されていない。システム方向は光ファイバ・ジャイロコンパス256によって測定される。深度はディジクォーツ深度センサ254によって、高度は高度計262によって絶えず測定される。次に、位置決めループが、上式にしたがって計算される平均誤差に対しての平均値および正規分布を使用し、スラスタ56(2)および56(3)に動力を提供して、システム50を所望の位置へと運ぶ。
【0087】
スラスタ56(2)、56(3)によって負荷43を伴うシステム50を所望の座標へ駆動する間、スラスタ56(1)、56(4)を使用して、システム50およびその負荷43の回転を打ち消す。これにより制御が向上する。というのは、特に重い負荷の場合に、回転運動の結果、負荷に他の望ましくない運動が生じることがあり、これは制御が困難だからである。負荷を伴うシステム50が、所望の座標上にある場合、負荷はシステム50とともに巻き上げワイヤ42によって下降する。負荷43の下降中、負荷43はシステム50によって絶えず制御され、これを回転させずに所望の位置に維持する。
【0088】
次の位相では、システム50は例えば海底4から約200m以下である。次に、ドップラー・ログ・ユニット266は底部トラック・モードに入る。これによって、作業は、海底4の標的位置への最終アプローチのため、より正確で高速な応答モードに変化する。次に、ドップラー・ログ・ユニット266および運動センサ256付きのジャイロコンパスを使用して、USBLのランダム・ノイズをフィルタリングする。フィルタリングしたら、正確なシステム50の速度を含むナビゲーション・データの良好な読取りによって、位置制御ループが極めて迅速化かつ安定する。数センチメートルまでの動作制御が獲得される高度に微調整された制御ループが、結果として生じる。次に、ソナー・ユニット260およびドップラー・ログ・ユニット266を使用して、標的ポイントの周囲に関する情報を提供し、したがって負荷43を適正な座標および適正な方向に配置することができる。次に、必要に応じて、スラスタ制御プロセッサ240によって制御されたとおり、スラスタ56(1)、56(4)により負荷43に回転を与えることができる。
【0089】
正規平均誤差を減少させるため、スラスタ56(2)、56(3)に2つの制御ループ、つまり平均誤差制御ループおよびさらなる制御ループを設ける。
【0090】
平均誤差制御ループは、平均誤差を減少させるよう、両方のスラスタ56(2)、56(3)に合わせて動力を等しく調節する。システム50が標的座標に到達するにつれ、スラスタ56(2)、56(3)への駆動出力は、システム50が海流中でその位置を移動できるようなレベルへと減少する。つまり、駆動出力は、最初は平均誤差に比例したレベルに設定された。しかし、システム50が標的座標に近づくにつれ、制御ループはスラスタ56(2)、56(3)に加わる駆動出力を徐々に減少させる。システム50が標的座標に到達するにつれ、スラスタ56(2)、56(3)への駆動出力が海流の強度を打ち消す平衡に到達する。平均誤差制御ループは、両方のスラスタ56(2)、56(3)に等しい記号の等しい力を提供する。
【0091】
正規平均誤差を減少させるため、さらなる制御ループを提供する。このさらなる制御ループは、海流に対して直角の運動が生成されるよう、スラスタ56(2)、56(3)に加えられる個々の力を調節する。さらなる制御ループは、このため、両方のスラスタ56(2)、56(3)に反対の記号の等しい力を加える。正規平均誤差を減少させるためにスラスタ56(2)、56(3)に加えられる力は、システム50が標的座標へと移動するにつれ、ゼロへと直線に減少することが好ましい。平均誤差の垂線がゼロに達したポイントで、海流方向が変化していないと仮定すると、システム50は正確に海底4の標的位置の上に位置し、スラスタ56(2)、56(3)に動力が供給されて、システム50を適正な座標上に維持し、海流を補正する。
【0092】
海流の方向が変化すると、上述した制御ループがスラスタに加わる力を調節し、最終的にシステムの方向を変化させる必要がある。新しい海流方向がシステム50に作用するので、システム50が標的座標から移動するにつれ、正規平均誤差が増加し始める。この効果を克服するため、正規平均誤差のサイズを再び制御して、ゼロへ減少させる。海流またはシステム50の自然のドリフトを打ち消すよう、システムの方向を変更する。
【0093】
回転式アクチュエータ65(1)、65(2)の回転方向は、垂線平均誤差の記号によって画定される。回転式アクチュエータ65(1)、65(2)を必要な位置に回転するのに必要な時間を短縮するため、スラスタ制御プロセッサ240がアルゴリズムを使用して、必要な方向への最短ルートを画定する。
【0094】
例えばナビゲーション・プロセッサ202に接続されたジョイスティック(図示せず)などによる手動制御も配置されることが想定される。
【0095】
システム50の位置決め中に、速度制御も加えることが好ましい。システム50が標的の座標に近づくにつれ、システム50の速度が低下することが好ましい。例えば、システム50と標的間の距離が所定の第1閾値より大きい場合、スラスタは、システム50に最大速度を提供するよう制御される。この第1閾値と標的座標への距離の第2閾値との間に、直線に減少する速度プロファイルを使用し、第2閾値は第1閾値より小さい。第2閾値より小さい距離以内で、システムはほぼゼロの速度に維持される。
【0096】
USBLの測定
USBLの測定原理は、2つの変換器間の正確な位相測定に基づく。1つの実施形態では、短基線(SBL)と超短基線(USBL)との組合せを使用し、それによって位相の曖昧さなく変換器間に大きい距離を使用することができる。USBLでは、正確度は信号対雑音比、および(干渉計測定法のように)変換器間の距離に依存する。次に、寸法に関して距離と流体力学的部品によって制限された周波数の兼ね合いをとる。
【0097】
曖昧さは、SBL測定値を相関データ処理と組み合わせて使用することにより、計算される。信号対雑音比は、このような相関処理の使用によって改善される。下式はUSBLの一般的正確度を画定する。

ここで、σθは標準角偏差、
Lは変換器の距離、
λは波長、
θは方位角である。
【0098】
上記で与えられた式は、変換器の距離Lを増加することによって、つまりアレイを増加させることによって改善されることを示す。さらに、周波数が高くなると正確度が向上する。流体力学的側面および位相の曖昧さがこれらのパラメータを減少させる。信号対雑音比は、相関データ処理を使用することにより増加する。
【0099】
距離および正確度を最適にするため、位相メータ測定には16kHzの周波数を使用することが好ましい。相関プロセスによって、多重通路の識別のために、狭いパルス長を維持しながら、距離範囲を増加させることができる。
【0100】
曖昧さの位相測定のため、システムはSBLで作動して、範囲セクタを判断し、セクタ内のUSBLで作動して、最高の正確さを達成する。
【0101】
範囲は、かなり低い周波数を使用することにより、8000mを上回る距離まで増加してもよい。
【0102】
付録A
カルマン・フィルタ
カルマン・フィルタは、恐らく海洋産業で最もよく知られた技術である。これは、最新の履歴に基づいて計算された予想値に向かう比較に基づいた高速のフィルタリング方法を与える。カルマン・フィルタリングについては詳細しないが、例えばM.S. GrewalおよびA.P. Andrews Prentice Hallによる「Kalman Filtering - Theory and Practice」(ISBN 0-13-211335-X)を参照されたい。
【0103】
位置トラックを速度データ(ドップラー・ログ)と組み合わせることができ、各ポイントは、隣接ポイント、時間の距離および実際の速度に基づいて改善される。カルマン値と改善される速度との間の重みは、ドップラー効率係数によって決定され、値が高いほど速度を考慮に入れる。
利点: 欠点:
非常に高速である かなり「平滑でない」結果
速度で改善できる 速度と位置の最善の組合せではない
【0104】
単純フィルタ
単純フィルタは、全ての位置を急いで調べ、最小の二乗誤差を与える平滑な曲線を計算する。つまりある種の最小二乗適合線である。
利点: 欠点:
高速である ドップラー・ログ・データを使用しない
結果が平滑である 曲線トラックに似ていない
【0105】
サロモンセン・フィルタ
サロモンセン・フィルタはデンマークの数学者でオルフス大学の教授兼博士であるHans Anton Salomonsenにちなんで命名され、高統合フィルタである。これはドップラー・トラックの短期間の安定性を利用し、これを位置トラックの長期の耐性と組み合わせる。
【0106】
説明
フィルタは、トラックに沿って時間を付加した位置データ、さらにドップラー・データがある状況で使用する。ドップラー・データは、通常は非常に精密であるが、絶対位置に関する情報は一切与えない。これに対して、位置データは絶対位置であるが、通常はそれほど精密でない。
【0107】
フィルタは2組のデータを組み合わせて、絶対位置を有する精密なトラックを生成する。これは以下のように実行する。
1.ドップラー・データを使用して、トラック、つまり三次式近似として形成されるトラックの形状を構築する。
2.起点(0,0)から開始し、ドップラー・データによって画定された通りの速度を使用する。
3.次に、位置データを使用してトラックを正確に位置決めする。トラックは、最小二乗技術を使用して可能な限り良好に、位置データに適合するよう並進、回転、および直線に延伸/圧縮される。
4.主に並進となる。しかし、他の変形も、ドップラー・データにあり得る系統的誤差を補正する働きをする。
【0108】
位置データは、2での修正でのみ使用するという事実は、位置データがかなり平均化を課されることを意味する。これは、位置測定の不確定さを減少させる。したがって、多くの位置データがある場合は、トラックの絶対位置が単独の各位置測定よりはるかに精密になると予想される。
H.A.サロモンセン
【0109】
数学的説明
アルゴリズムは5つのステップに分割される
ステップ1:
各ポイントの加速度を計算する
1/2hk+1(X1”+Xk+1”)=Xk+1’−Xk’
ここで
hk=tk−tk−1
tk=速度測定のタイムスタンプ
Xk’=tkにおける速度測定値
Xk”=tkにおける加速度測定値
ステップ2:
加速度および速度、および(以前の速度測定値および加速度に基づいて)以前に計算した位置に基づき、次の位置を計算する。
Xk+1=Sqr(hk+1)/6(2Xk”+Xk+1’)+hk+1Xk’+Xk
ここでXk=tkにおいて計算した位置(速度タイムスタンプ)
ステップ3:
(第1速度測定値を使用して)実際のタイムスタンプで位置を計算する
X(t)=1/2hk+1{((hk+1)^2(t-tk)+1/3(tk+1-t)^3-1/3(hk+1)^3)Xk+1”/3(t-tk)^3Xk+1"}
ここで
X(t)=時間tにおける位置
ステップ4:
第1速度測定値の位置を位置計算値に加算する
ステップ5:
位置計算値を現実の位置線の適合度に合わせて移動、回転、延伸または圧縮する
利点: 欠点
最高のドップラーと位置を組み合わせる 複雑なマトリクスのために遅くなる
全データを考慮に入れる 良好なドップラー・ログに依存する
結果が平滑である
【0110】
サロモンセン光
サロモンセン・フィルタの光バージョンは、NaviBatオンライン・プログラムで最初に導入され、解決の高速化を2つの方法の良い方と組み合わせるよう考案された。
【0111】
オンラインの性質のため、フィルタ・ポイントの決定に履歴を使用するだけである。したがって、結果は線の開始時に比較的粗く、移動するにつれ良好になる。
【0112】
基本操作
フィルタは、リセット・コールから開始して、フィルタを初期化する。リセットは、第1速度測定値を使用して実行される。フィルタは速度と位置のデータ両方を使用する。三次式近似曲線は、速度記録を使用し、位置をこの曲線に可能な限り良好に適合させて生成する。
【0113】
フィルタは、後に処理するため、保存した位置記録を読みとる。
【0114】
速度記録を読み取ったら、「ノット」を作成する。以前の速度記録と現在の速度記録(単位は時間)との間に位置読取り値がある場合は、それを調節して曲線に適合させる。
【0115】
履歴
フィルタ利得パラメータは0から1の値で、ドップラー・ログ・データおよび履歴が流ポイントに及ぼす影響を制御する。
【0116】
1の値では、ライン上にあるドップラー・ログ・データおよび履歴はより大きい重みを有する。値が小さくなるのは、有効な速度記録より多くの位置記録がある場合のみである。
【0117】
有用な値は0.9から1の範囲、例えば0.99である。
【0118】
誤差補正
位置および速度記録は、以前のデータを使用して予測した値と比較することができる。いつデータを拒否するか、制限を設定してもよい。
【0119】
リセット
多くの誤ったデータ・ポイントがある場合は、フィルタがトラックを失う危険がある。オペレータはフィルタを手動でリセットする、つまり履歴を抹殺することができる(自動リセットを設計するために試みられる)。
利点: 欠点
最善のドップラーと位置を組み合わせる ライン開始時に「平滑でない」
高速である
全体的結果が平滑である
ノイズの多いドップラー・データを扱える
【図面の簡単な説明】
【0120】
【図1】沖合石油化学採収専用のFPSO(浮遊、採集、貯蔵および荷下ろしシステム)の略図を示す。
【図2】先行技術によるクレーン船を示し、比較的長いワイヤ・ロープでクレーン・ブロックに装備された負荷を表し、それによって大きい深度では負荷の制御が事実上不可能であることを理解することができる。
【図3】先行技術により海底との間で負荷を配備および/または回収するクレーン船および水中システムを示す。
【図4】水中システムの可能な実施形態の詳細な概要図を示す。
【図4a】回転式スラスタの1つの詳細な概要図を示す。
【図5】上から見た水中システムを示す。
【図6a】幾つかの検出器を伴う主要モジュールの下側を示す。
【図6b】幾つかの検出器を伴う主要モジュールの下側を示す。
【図7a】船舶上の電子機器の略ブロック図を示す。
【図7b】音線に関する、および水中システムに関する電子機器の略ブロック図を示す。
【図8】水中システムをその標的位置へと駆動する間に使用する3つの異なる座標系の定義を示す。
【符号の説明】
【0121】
50 水中システム
51 主モジュール
52 カウンタ・モジュール
56 スラスタ
57 ジャッキ
58 ジャッキ
200 電子機器
249 水中電子機器
250 音響アレイ
252 ジャイロコンパス
258 音速メータ
260 ソナー機器
266 トップラー・ログ
【技術分野】
【0001】
本発明はナビゲーション・プロセッサ、該ナビゲーション・プロセッサを備えた処理構成、該ナビゲーション・プロセッサを備えた測定システム、該ナビゲーション・プロセッサを用いて水中システムの位置及び姿勢を測定する方法に関する。
【背景技術】
【0002】
国際特許第99/61307号は、標的を水中標的位置に配備する装置に関し、装置には、音線を送信するビーコン、および水中標的位置に対して装置の配置を制御する複数のスラスタを設けた例を開示している。
【0003】
先行技術の装置が、例えば最大3,000メートル以上の深い海底で最大1000トン以上の負荷を配備および/または回収するのに使用されている。配備中に、装置は海面に浮かぶ船上の制御機器によって制御される。制御機器は、装置の正確な位置を可能な限り正確に知る必要がある。そのため、装置の板上にあるビーコンが、海水を通して船に音線を送信する。適切な音波受信器がこの音線を受信し、これを、船に対する装置の位置の計算に使用する電気信号に変換する。
【0004】
しかし、海水中で装置の深度が増加するにつれ、海水中での音波の屈曲により、位置測定の正確度が低下することが分かっている。
【発明の開示】
【発明が解決しようとする課題】
【0005】
したがって、本発明の目的は、海水中または他の流体中で使用中に、このような装置の位置測定の正確度をさらに向上させることである。さらに、このような位置測定がオンライン(実時間)で必要である。
【課題を解決するための手段】
【0006】
この目的を達成するため、本発明によれば、船舶上の、音響プロセッサ(224)と、表面位置決め機器DGPSにインターフェース接続されたナビゲーション・プロセッサ(202)であって、該ナビゲーション・プロセッサ(202)は、共通の座標系である第1の座標系における水中システム(50)の姿勢および絶対座標を計算するため、
i. 前記表面位置決め機器DGPSからの位置データ、
ii. 上下浮動、横揺れおよび縦揺れセンサを含む水中システム(50)上の光ファイバ・ジャイロコンパス(256)からのデータ、
iii. 水中システム(50)からの深度データ、
iv. 水中システム(50)上のドップラー・ログ・ユニット(266)に基づいての水中システム(50)の速度データ、
v. 前記音響プロセッサ(224)からの、システム(50)の距離及び方位データ
を受信するナビゲーション・プロセッサが提供される。
【0007】
また、本発明によれば、ナビゲーション・プロセッサ(202)と音響プロセッサ(224)を備え、該ナビゲーション・プロセッサ(202)は音響プロセッサ(224)と船舶(20)上の表面位置決め機器DGPSにインターフェース接続された処理構成で、
該ナビゲーション・プロセッサ(202)は、共通の座標系である第1の座標系における水中システム(50)の姿勢および絶対座標を計算するため、
i. 前記表面位置決め機器DGPSからの位置データ、
ii. 上下浮動、横揺れおよび縦揺れセンサを含む水中システム(50)上の光ファイバ・ジャイロコンパス(256)からのデータ、
iii. 水中システム(50)からの深度データ、
iv. 水中システム(50)上のドップラー・ログ・ユニット(266)に基づいての水中システム(50)の速度データ、
v. 前記音響プロセッサ(224)からの、システム(50)の距離及び方位データ
を受信し、前記ナビゲーション・プロセッサ(202)と音響プロセッサ(224)は1つ又は複数のコンピュータによって実現される、処理構成が提供される。
【0008】
また、本発明によれば、ナビゲーション・プロセッサ(202)と音響プロセッサ(224)と水中システム(50)を備える測定システムであって、該ナビゲーション・プロセッサ(202)は音響プロセッサ(224)と船舶(20)上の表面位置決め機器DGPSにインターフェース接続され、前記水中システム(50)は光ファイバ・ジャイロコンパスとドップラー・ログ・ユニットと深度センサを備え、前記光ファイバ・ジャイロコンパスは上下浮動、横揺れおよび縦揺れセンサを含み、該ナビゲーション・プロセッサ(202)は、共通の座標系である第1の座標系における水中システム(50)の姿勢および絶対座標を計算するため、
i. 前記表面位置決め機器DGPSからの位置データ、
ii. 上下浮動、横揺れおよび縦揺れセンサを含む水中システム(50)上の光ファイバ・ジャイロコンパス(256)からのデータ、
iii. 水中システム(50)からの深度データ、
iv. 水中システム(50)上のドップラー・ログ・ユニット(266)に基づいての水中システム(50)の速度データ、
v. 前記音響プロセッサ(224)からの、システム(50)の距離及び方位データ
を受信する測定システムが提供される。
【0009】
また、本発明によれば、船舶上の、ナビゲーション・プロセッサ(202)を用いて水中システム(50)の位置及び姿勢を測定する方法であって、共通の座標系である第1の座標系における水中システム(50)の姿勢および絶対座標を計算するため、
i. 前記表面位置決め機器DGPSからの位置データを受信するステップと、
ii. 上下浮動、横揺れおよび縦揺れセンサを含む水中システム(50)上の光ファイバ・ジャイロコンパス(256)からのデータを受信するステップと、
iii. 水中システム(50)からの深度データを受信するステップと、
iv. 水中システム(50)上のドップラー・ログ・ユニット(266)に基づいての水中システム(50)の速度データを受信するステップと、
v. 前記音響プロセッサ(224)からの、システム(50)の距離及び方位データ
を受信するステップとを備える方法が提供される。
【0010】
他の実施例は従属請求項に記載されている。
【0011】
以下で、図面を参照しながら本発明について詳細に説明する。図面は、本発明を例示するだけであって、その範囲を制限するものではなく、その範囲は添付の請求の範囲によってのみ規定される。
【0012】
(好ましい実施形態の説明)
図1を参照すると、レイアウトは、ライザ2の起点である旋回式採集スタック11を伴うFPSO1を表し、前記ライザは海底4にあるライザ・ベース3に接続される。採集の寿命において、許容可能な動的偏位範囲内に留まることがFPSO1にとって最も重要であり、したがってFPSO1は、錨6によって、あるいはパイルによって保持される係留脚5によって海底4に係留される。
【0013】
採集船1によって石油またはガスを採掘するには、幾つかの比較的重い物体を高い正確度で海底4に配置する必要がある。
【0014】
係留脚5によって適切で安全な錨を固定するには、その係留脚5がほぼ同じ長さを有する必要がある。この用途では、実際には50トン以上の重量の錨を使用することができ、これを数メートル以内の正確度で海底4に配置する。さらに、錨6自体が非常に重いばかりでなく、錨6に取り付けた係留脚も、錨6自体の重量の数倍に等しい重量を有する。
【0015】
また、「テンプレート」、「重力ライザ・ベース」、「採集マニホルド」など、他の物体も、比較的高い正確度で海底4に配置する必要がある。
【0016】
図1に図示され、海で石油およびガスの採掘に必要であり、海底に配置しなければならない物体は、非常に重量があるばかりでなく、非常に高価でもある。
【0017】
図2は、先行技術の船舶20を示し、自身上にクレーン21のような巻き上げ手段を有する。クレーン21には巻き上げワイヤ22を設け、これによって物体または負荷23を海底4に配置することができる。負荷23を配置するためには、表面支持体をクレーン21とともに移動させる必要がある。
【0018】
その結果、任意の時に負荷23の慣性が克服されるが、負荷23の加速のため、制御不可能な状況が発生し、それによって標的区域を飛び越してしまう。巻き上げワイヤ22および負荷23は海流などの影響を受けやすいという事実から、巻き上げワイヤ22を下降させた場合、負荷23は下方向に直線移動しない。船舶20の上下浮動、横揺れおよび縦揺れも、達成できる正確度にマイナスの影響を与える。
【0019】
図3は、海底4に負荷43を配備する水中装置またはシステム50を設けたクレーン船40を示す。船舶40は、第1巻き上げワイヤ42を設けた第1巻き上げ手段、例えばウィンチ41を備える。この巻き上げワイヤ42によって、例えばテンプレートなどの負荷43を海底に配備し、配置することができる。
【0020】
上述したように、浮採集プラットフォームを使用する油田およびガス田の採掘では、海底4に幾つかの重い物体を配置する必要があり、さらに物体を非常に高い正確度で海底4に配置しなければならない。現今は採掘を深い所でしなければならず、最大で3000m以上にもなり、必要な正確度を達成することがさらに困難になっている。例えば、解決すべき問題の一つは、巻き上げワイヤ42が担持する負荷43に発生し得る回転である。
【0021】
配備時に負荷43の位置を制御し、必要な正確度以内で負荷43を海底4に配置できるようにするため、装置またはシステム50は吊り上げワイヤ42に固定されている。システム50の好ましい実施形態を、図4、図5、図6aおよび図6bに関して説明する。
【0022】
システム50は吊り上げワイヤ42の端部に係合してよい。あるいは、システム50は負荷43自体に直接係合してよい。システム50は、スラスタ56(i)(i=1、2、3・・・IでIは整数である)などの駆動手段を設けた第1または主モジュール51を備える(図4および図5)。システムはさらに第2またはカウンタ・モジュール52を備える。このカウンタ・モジュール52にもスラスタ56(i)を設ける。使用時には、主モジュール51およびカウンタ・モジュール52のスラスタを吊り上げワイヤ42の対向する側に配置する。
【0023】
システム50は第2吊り上げワイヤ45によって船舶40に結合される。このワイヤ45は例えば第2ウィンチ44などの第2巻き上げ手段を使用して操作することができる。第2巻き上げワイヤ45は、例えばAフレーム49によって船外へ設置される。第2ウィンチ44および第2巻き上げワイヤ45は通常、それぞれ第1巻き上げ手段48および第1巻き上げワイヤ42より軽量である。システム50はさらに命綱46によって船舶40に接続される。この命綱46は巻き上げワイヤ45に取り付けるか、第3ウィンチ47から別個に下降させることができる。システム50に動力を提供する供給電力配線、さらに電気配線または光ファイバを、例えば命綱に収容する。システム50には、通常、電力を流体動力に変換する手段を設ける。したがって、流体動力は、制御に、つまりスラスタ56(i)および補助工具の快適装備に使用される。
【0024】
最近、作業の深度が増加しているので、負荷43および長い巻き上げワイヤ42の捻れおよび回転の問題が重大になってくる。重い負荷43を巻き上げワイヤ42の下側に取り付けるので、このような捻れおよび回転が巻き上げワイヤをかなり摩耗させることになり、巻き上げワイヤに深刻な損傷が発生することがある。この摩耗は、巻き上げワイヤ42が破損し、負荷43が喪失するほど深刻になることがある。別の問題は、ワイヤの多大な捻れのため、船舶にあるワイヤがシーブから外れることがあることである。
【0025】
主モジュール51およびカウンタ・モジュール52それぞれのスラスタ56(i)を吊り上げワイヤ42の対向する側に配置するという事実から、巻き上げワイヤ42には両方向に逆トルクがかかる。この方法で、システムにより捻れ防止器具が形成される。この捻れ防止器具の能力を改善するため、主モジュール51とカウンタ・モジュール52間の距離を変更できることが好ましい。
【0026】
図4は、海底4に負荷43を配備するシステム50に可能な実施形態の詳細な概要図を示す。図5は、図4によるシステムを上から示す。
【0027】
システム50は、主モジュール51、カウンタ・モジュール52およびアーム53を備える。アーム53は主モジュール51から取り外すことができる。つまり、主モジュール51はモジュール式システムとして別個に使用することもできる。アーム53には窪み54を設ける。この窪み54の対向する側に2つのジャッキ57、58を設け、その少なくとも一方は他方に対して移動することができる。これらのジャッキ57、58の端面の間で、負荷43のクレーン・ブロックなどの物体又はケーブル42を締め付けることができる。ジャッキ57、58と物体間の接触を改善するため、ジャッキの個々の端部に、専用ゴムなどの高い摩擦材料からの摩擦要素でライニングを施した締め付けシューを設ける。
【0028】
使用時には、スラスタ56(i)を使用して、海底4の標的区域に対してシステム50を配置することができる。スラスタ56(i)は、主にシステム50の内側にある第1位置から、スラスタがシステム50から突き出した位置へと順次作動させるようにすることができる。2つの上部スラスタ56(2)、56(3)は、水中システム50に対して回転可能である。これは、例えば個々の回転式アクチュエータ65(1)、65(2)に設置する。その目的については以下で説明する。スラスタ56(2)は、図4aでは拡大して図示されている。
【0029】
図5には、主モジュールを第2吊り上げワイヤ45および/または命綱46に接続するには、主モジュール52の頂部に2つの位置61、62があることが図示されている。主モジュール51を別個に使用する場合は、位置61を使用することができる。主モジュール61は、モジュール61を配備する時に、空中でも水中でもバランスをとる。
【0030】
システム50を使用する場合、船舶40とシステム50との接続は、システムを空中と水中の両方で平衡に維持するために位置62に固定される。システムのバランスを改善するため、補助釣合錘55をシステム50に固定することができる。
【0031】
使用時には、装置50には浮力がない。水中におけるシステムの可動性を改善するため、アーム53には、下降中に圧力増加による構造的損傷を回避し、採集段階では迅速な排水を保証するために穴59を設ける。
【0032】
上述したように、主モジュール51に対してカウンタ・モジュール52を移動できると有利である。これは、ジャック64aを使用することによって達成できる。
【0033】
モジュール51は外フレームおよび内フレーム(両方とも図示せず)を備える。内フレームは円筒形であることが好ましい。外フレームを内フレームに接続することにより、非常に強力な構造を達成することができる。構造の強度は、システムの時期尚早の疲労を回避するために必要である。
【0034】
モジュール51は、例えば部分的に高張力鋼で作成し、それによって第1巻き上げワイヤ42または第2巻き上げワイヤ45の一体部品として使用するよう設計される。つまり、モジュール52の上側が巻き上げワイヤ45の第1部分に接続され、モジュール51の下側が巻き上げワイヤ45の第2部分に接続されるか、モジュール51の下側が負荷に直接取り付けられる。この方法で、巻き上げワイヤにかかる負荷がモジュール51を通して伝達される。
【0035】
前述したように、モジュール51には、命綱46を通って送出された電力を流体動力に変換するため、スラスタ・ドライブ270を設ける。このスラスタ・ドライブ270はモータ、ポンプ、マニホルドおよび液圧リザーバを備えることができる。このような変換手段は当業者には知られ、本明細書でさらに説明する必要はない。絶対位置と他の物体に対する相対位置との両方で、その位置に関する該当データを制御システムおよび/または船舶40上のオペレータに通信するため、モジュール51は、さらに、以下で詳細に説明するセンサ手段および制御手段を備える。モジュール51は、センサ接続箱を装備する。さらに、モジュール51は光源87、上下浮動、横揺れおよび縦揺れセンサを含むジャイロコンパス256、パンあおりカラー・カメラ97、ディジクォーツ深度センサ253を含むUSBL応答器255、音速メータ258、およびソナーダイン・ミニ・ロヴナヴ264を備える。モジュール51の下側には、幾つかのプラットフォーム光源94、パンおよびS.I.T.カメラ93、高度計262、ドップラー・ログ・ユニット266、および二重ヘッド・スキャニング・ソナー260が装着される。これらは、使用時にその下に透明な海水のみがあるよう設置される。これらは、図6aおよび図6bに概略的に図示される。これはどこにでも、例えばモジュール52の下側にでも配置してよいことを理解されたい。さらに、ロード・セル268はシステム51の一部である。これらの構成要素は全て、図7bに概略的に図示される。
【0036】
上述したように、負荷が所期の深度に到達したら、必要な正確度を達成するには、高解像度のソナー機器260をドップラー・ログ・ユニット266で測定した距離ログとともに使用することが重要である。ソナー機器260は、海底に配置された少なくとも1つの物体に対する位置を判断するために使用される。距離ログを使用すると、大きい半径内でセンチメートルのオーダーの正確度を達成しながら、海上支援からの位置決め動作を、さらにLBL(長基線)アレイ(または他のUSBLなど)のような他の音響応答器装置からの位置決め動作から解離することが可能になる。
【0037】
図7aは、船舶40に設置された電子機器200を示し、図7bは音速メータ248およびジャイロコンパス252を伴う配備可能な音響アレイ250を示す。図7bは、水中システム50に設置した水中電子機器249も示す。
【0038】
図7aに示す機器は4つのプロセッサを備える。つまりナビゲーション・プロセッサ202、音響プロセッサ224、ソナー制御プロセッサ236、およびスラスタ制御プロセッサ240である。ナビゲーション・プロセッサ202は、相互通信および相補性のために他の3つのプロセッサ224、236、240とインターフェースをとる。
【0039】
ナビゲーション・プロセッサ202は、表面位置決め機器DGPS(相対全地球測位システム)204、船舶のジャイロコンパス206、4つのディスプレイ・ユニット208、210、212、214、プリンタ・ユニット218、キーボード220、マウス222、光ファイバ・(デ)マルチプレクサ・ユニット244ともインターフェースをとる。必要に応じて、ナビゲーション・プロセッサ202の1つのSVGA信号出力を2つ以上のディスプレイ・ユニットに送信するため、ビデオ・スプリッタ216を設けてもよい。図7aでは、ディスプレイ・ユニット212、214はビデオ・スプリッタ216を介してナビゲーション・プロセッサ202に接続される。
【0040】
光ファイバ(デ)マルチプレクサ・ユニット244は、音響プロセッサ224、ソナー制御プロセッサ236、およびスラスタ制御プロセッサ240にも接続される。
【0041】
音響プロセッサ224はコマンドおよび制御ユニット226に接続され、これはキーボード230、マウス232およびディスプレイ・ユニット228に接続され、これが全てまとめてUSBL表面ユニット234を形成する。
【0042】
音響プロセッサ224は、運動センサ・ユニット252および速度メータ248を伴う配備可能な音響アレイ250に接続される。使用時には、音響アレイ250は船舶40のキールの2.5メートル下に装着することが好ましい。
【0043】
光ファイバ・(デ)マルチプレクサ・ユニット244が、さらに、水中システム50に設置された光ファイバ・(デ)マルチプレクサ246に接続される。両方の光ファイバ・(デ)マルチプレクサ244、246を相互接続する光ファイバは、命綱46に収容することが好ましい(図3)。
【0044】
ソナー制御プロセッサ236はディスプレイ・ユニット238に接続される。スラスタ制御プロセッサ240はディスプレイ・ユニット242に接続される。
【0045】
水中機器249は、図7bではブロック図の形態で図示される。ディジクォーツ深度センサ253を伴うUSBL応答器255、運動センサ256を伴うジャイロコンパス、(着脱式)音速メータ258、二重ヘッド・スキャニング・ソナー260、高度計262、ソナーダイン・ミニ・ロヴナヴ264、ドップラー・ログ266、ロード・セル268、およびスラスタ・ドライブ・コントロール270が全て光ファイバ・(デ)マルチプレクサ246に接続される。
【0046】
さらに、図7bは、海底に、または配備すべき負荷に(または海底に既にある構造に)設置できる2つのビーコン272、274を示す。これらのビーコン272、274は、例えばソナーダイン・ミニ・フォヴナヴ264(または同等の機器)により問い合わせるものであり、音響信号をシステム50に送り返すことができ、これをシステム50自体が使用して、これらのビーコンに対する距離および方位を判断し、測定することができる。このような音響遠隔測定リンクの結果、非常に高精度の相対位置測定ができる。このようなビーコンの数は、図7bに示す2個に制限されない。
【0047】
機能
図7aおよび図7bに示す構成要素の機能は次の通りである。
【0048】
ナビゲーション・プロセッサ202は、船舶の姿勢およびその固定オフセットを計算するため、海上の位置決め機器のデータ(DGPS受信器、DGPS補正、船舶のジャイロコンパスおよび船舶の運動センサ204および206)を収集する。
【0049】
ナビゲーション・プロセッサ202は、光ファイバ・(デ)マルチプレクサ244および246を介して、システム50のナビゲーション計器、つまりドップラー・ログ266、高度計262、およびジャイロコンパスおよび運動センサ256に様々な設定を送信する。設定後、これはこれらの計器からデータを受信し、さらに音響プロセッサ244を介してシステム50の距離/方位および深度データを受信し、システムの姿勢および絶対座標を計算して表示する。
【0050】
ナビゲーション・プロセッサ202の統合ソフトウェアが開発されており、これにはシステム50の初期の方向を決定し、多くの中間地点から選択して、初期の位置決めを実行するため、手動または自動モードで作業することができる動的位置決めコントローラ・ソフトウェアを含む。さらに、船上のオペレータは選択された中間地点に対するオフセットを入力することができ、オフセットは、システム50の方向に対するXY座標で入力される。位置を安定させ、フィルタリングするため、ディスプレイ・ユニット208〜214の画面(電子ページ)上にある特別設計のウィンドウの構成を介して幾つかの他のタイプの海中位置決め装置を選択するという、別の可能性もある。オペレータが最適な結果を獲得するために可能な限り多くの手段を有することを保証するため、ソフトウェアのその他の部分ではシステム50の位置をオンライン(実時間)で計算するために使用中の海中計器の様々な状態を示すようになっている。
【0051】
システム50上の上下浮動、横揺れおよび縦揺れセンサ88を含む搭載ジャイロコンパス256は、海底に設置されるシステム50および負荷43両方の正確な姿勢に関するデータを提供する。海面では、制御バン内でオペレータが、下降中に、しかし負荷43が最終検証のために海底に配置されてからも、これらの姿勢をオンライン(実時間)でチェックすることができる。
【0052】
船舶のジャイロコンパス206、さらに同じ機能のために使用できる音響アレイに設置した運動センサ252を伴うジャイロコンパスは、船舶の方向をナビゲーション・プロセッサ202に送信する。ナビゲーション・プロセッサ202はこの船舶の方向を使用して、様々なオフセットを計算する。
【0053】
ディスプレイ・ユニット208、210、212および214はそれぞれ、制御バン内でオペレータのためにおよび海洋部門オペレータ用船橋上にある別の人のために、ナビゲーションの設定、海底の眺め、海面の眺めを表示するよう構成される。
【0054】
USBL命令および制御ユニット226は、システムの制御および構成を提供し、オペレータが制御するためのマン・マシン・インターフェースを表示するパーソナル・コンピュータで構成される。
【0055】
音響プロセッサ224は、受信信号、深海速度測定および船舶の姿勢で相関プロセスを実行する1つのVMEラックで構成される。さらに、これは使用するビーコンの座標を計算する。音響プロセッサ224は、イーサネット(登録商標)を通してナビゲーション・プロセッサ202に連結される。
【0056】
音響アレイ250は、送信および受信手段を含む。また1つまたは複数のビーコンと音響通信する変換器として使用することができる。このような変換器のモードは、命綱46が故障し、呼び掛け信号をシステム50へと送信できない場合に有用である。これで、音響呼び掛け信号は海水を通して変換器から直接送信することができる。他の全てのケースで、音響アレイ250は受信モードで使用される。受信は、音響アレイ250に対するビーコンの距離および方位角を測定する2つの直交受信ベースで実行される。各受信ベースは2つの変換器を含む。各受信信号は、ディジタル信号処理のため、増幅され、フィルタリングされて、音響プロセッサ224に転送される。
【0057】
音響アレイ250に設置された音速メータ248は、船舶40のすぐ下にある重要で不安定な音速プロファイルを実時間で更新している。これは、船舶40のすぐ下にあるこれらの層では海水の乱流が非常に激しいようであるので非常に重要である。
【0058】
ジャイロコンパス252は、海中のシステム50の位置に関するデータを修正するため、音響プロセッサ224に音響アレイの姿勢を送信する運動センサ・ユニットとして使用することが好ましい。
【0059】
好ましい実施形態では、ビーコン274は応答器モードで作業し、以下の特徴を有する。
−音響プロセッサ224が生成する呼び掛け開始信号は音響信号ではなく電気信号で、船舶40とシステム50間のケーブル・リンクを通してビーコン274に送信される。
−呼び掛け頻度は、マン・マシン・インターフェースを通してオペレータにより遠隔制御される。
【0060】
上述したように、ビーコン274は応答器モードで使用することもできる。これで、ビーコン274は、音響アレイ250が送信した表面音響信号によって作動し、次にコード化音響信号を通して音響アレイ250に音響応答信号を送出する。
【0061】
ビーコン274に含まれるディジクォーツ深度センサ253によって、システム50の非常に正確な深度データを音響プロセッサ224に送信することができる。音響プロセッサ244はこれらのデータを使用し、システム50の海中位置およびその負荷の計算を改善する。
【0062】
海中システム50に搭載された音速メータ258は、下降および回収中に、海中システムの深度における海水中の音速に関するデータを音響プロセッサ224に送信する。音速データは、深度の関数として計算された海水中の音速プロファイルを更新して、海水中の深度の関数としてこれらのプロファイルから音線の屈曲を計算し、したがってシステム50の海中位置の計算を補正するために使用される。
【0063】
二重ヘッド・スキャニング・ソナー260は、海底の人工または天然の標的までのシステム50の距離および方向を測定し、対応するデータをディジタル値としてナビゲーション・プロセッサ202に出力するために使用される。このような人工または天然の標的の位置を予め画定するか、ナビゲーション・システムが選択された標的それぞれに座標を割り当てることができる。物体に座標を与えた後、これを局所座標系のナビゲーション基準として使用することができる。その結果、相対座標の正確度が0.1メートルになる。
【0064】
システム50に装着された高度計262は、水中システム50から海底までの垂直距離を測定し、出力測定データを音響プロセッサ224に送信する。
【0065】
ドップラー・ログ・ユニット266は、水中システム50の深度における海水流の値および方向に関するデータを提供する。これらのデータは2つの方法で使用される。
【0066】
まず第1に、ドップラー・ログ・ユニット266および運動センサ266付きジャイロコンパスから受信したデータは、音響プロセッサ224が、USBLの使用に関するランダム・ノイズをオンライン(実時間)で平滑化するのに使用する。このような平滑化を獲得するため、例えばカルマン・フィルタ、サロモンセン・フィルタ、サロモンセン光フィルタ、または他の適切なフィルタなど、フィルタを主プロセッサ・ユニット224内で使用する。このようなフィルタは当業者には知られている。付録Aに簡単な要約を示すことができる。
【0067】
第2に、海流の強度、海流の方向に関するドップラー・ログ・ユニット266の出力データは、水中システム50の現在の方向および所期の方向に関するデータとともに、ナビゲーション・プロセッサ202を介してスラスタ制御プロセッサ240に送信される。所期の方向に基づき、スラスタ・ドライブ・コントロール270は自動的に制御される。手動制御も提供することができる。
【0068】
非常に有利な実施形態では、ドップラー・ログ・ユニット266(または他の適切なセンサ)を使用して、システム50を取り巻く海水の温度および/または塩分を測定する。局所的温度および/または塩分に関するデータはナビゲーション・プロセッサ202に送信され、これは海水の深度の関数として温度および/または塩分を計算し、更新する。これらのデータは、海水を通る音波の屈折を判断し、したがってシステム50の位置の計算を補正するのにも使用される。
【0069】
ソナーダイン・ミニ・ロヴナヴ264はオプションであり、上記で説明したように海底の局所的ビーコンに対するシステム50の相対位置を提供するために使用することができる。例えば、長基線(LBL)アレイは、既に海底に設置し、その目的で使用することができる。
【0070】
ロード・セル268は、水中システム50と係合した状態の負荷43の重量を測定するのに使用される。この重量が減少した場合、これは負荷が現在、海底(または他の標的位置)に配置され、システム50を負荷43から取り外せることの指標である。ロード・セルからの出力データは、(デ)マルチプレクサ244、246を通してナビゲーション・プロセッサ202に送信される。
【0071】
スラスタ・ドライブ・コントロール270は、以下で詳細に説明するように、水中システム50を所望の位置に運ぶため、スラスタ56(i)を駆動するのに使用する。
【0072】
図7aでは、4つの異なるプロセッサ202、224、236および240が本発明によるシステムの機能を実行するよう図示されている。しかし、システムは代替的に、パラレルまたはマスター・スレーブ構成の1つのメイン・フレーム・コンピュータを含め、他の適切な数の協働するプロセッサで実行できることが理解される。遠方に配置したプロセッサを使用してもよい。機能の一部を実行するため、水中システム50上にプロセッサを設けてもよい。
【0073】
プロセッサは、ハード・ディスク、リード・オンリー・メモリ(ROM)、電気的に消去可能なプログラマブル・リード・オンリー・メモリ(EEPROM)およびランダム・アクセス・メモリ(RAM)などを含むメモリ・コンポーネントを含むが、積極的に図示していない。これらのメモリ・タイプの全てを必ずしも設ける必要はない。
【0074】
キーボード220、230およびマウス222、232の代わりに、またはそれに加えて、タッチ・スクリーンなどの当業者に知られた入力手段も設けることができる。
【0075】
図示の構成全体内の通信はいずれも無線でよい。
【0076】
図5には、上スラスタ56(2)および56(3)がスラスタ56(1)および56(4)とは別の方向に配向された状態が図示される。スラスタ56(2)、56(3)は回転式アクチュエータ65(1)、65(2)に装着され、それにより、スラスタ56(2)、56(3)を最大360°回転して、これを方向転換することができる。スラスタ56(2)、56(3)は、それぞれが異なる方向に配向できるよう、別個に制御できることが好ましい。
【0077】
スラスタ制御プロセッサ240が水中システム50を正確に配置できるため、ナビゲーション・プロセッサ202とスラスタ制御プロセッサ240の間に共通の座標系を確立しなければならない。まず第1に、ナビゲーション・プロセッサ202が使用する標準的な座標系がある。しかし、水中システム50には2つの他の座標基準系を確立することが好ましい。
【0078】
図8は3つの異なる座標系を示す。ナビゲーション・プロセッサ202に関する座標系は、「ナビゲーション・グリッド」で示される。この座標系はこの「ナビゲーション・グリッド」の方向およびその垂線を使用する。
【0079】
スラスタ56(2)、56(3)は、「スラスタ平均方向」と呼ばれる方向に駆動力を提供するよう制御される。この方向は垂線とともに第2座標系を画定する。
【0080】
第3座標系は「システム方向」に対して画定され、これはスラスタ56(1)、56(4)を相互接続する線に直角の方向として定義される。
【0081】
これで、水中システム50が辿る経路の誤差は、「平均誤差」と呼ばれるスラスタ中間方向に平行な1つの成分と、「垂線平均誤差」と呼ばれるスラスタ中間方向に直角の成分とに分割できる誤差ベクトルに関して定義することができる。水中システム50の適切なセンサは、ナビゲーション・プロセッサ202にスラスタ中間方向およびシステム方向を提供する。これらのデータから、ナビゲーション・プロセッサ202は図8に示すようなグリッドを生成する。
【0082】
誤差は、所望の位置DPからシステム位置TPを引いた値と定義され、したがってナビゲーション・グリッド基準に対してベクトルRΦENが生成される。つまり下式になる。
DP−TP=RΦEN
さらに、
ΦTNはシステム方向からナビゲーション・グリッドの方向を引いた値であり、
ΦMTは平均スラスタ方向からシステム方向を引いた値である。
これで次式になる。
DP−TP=RΦEM,ΦEM=ΦEN−(ΦTN+ΦMT)
これでRΦEMが分かるので、平均値および平均誤差の垂線を計算することができる。
【0083】
2つのスラスタ56(1)および56(4)を使用して、吊り上げケーブル42によって与えられた捻り力、機器の抗力および位置決め制御装置の方向転換によって誘発される回転モーメントを打ち消す。方向の制御ループには、ナビゲーション・プロセッサ202に実際のシステム方向および所望のシステム方向を提供する必要がある。実際のシステム方向は、ジャイロコンパス256によって測定される。所望の方向はオペレータが手動で入力する。これらの2つの方向から、ナビゲーション・プロセッサ202の制御ループが、必要な方向と実際の方向間の角距離を、さらにそれに従ってシステム50を移動するのに必要な回転方向を計算する。次に、スラスタ制御プロセッサ240が制御する単純な制御ループが、スラスタ56(1)および56(4)への動力を調節し、システム50を適切に回転する。
【0084】
システム50に電源投入すると、スラスタの平均方向がシステム方向に平行に配向されるよう、両方のスラスタ56(2)および56(3)を配向することが好ましい。次に、スラスタ56(2)、56(3)に、システム方向からの小さいベクトル角度偏差が与えられ、システム50の2つの面における位置決めを補助する。このベクトルのサイズは、好ましくは手動で調節可能であり、実際の海の状態に応じて異なる各作業に応じて構成する必要があることがある。スラスタ56(2)および56(3)をセンタリングし、方向転換したら、位置決めループがシステム50の制御を引き継ぐことができる。
【0085】
位置決めループはさらに2つの位相を備える。
【0086】
システム50がまだ海面付近にある間に実行される第1の次の位相では、海流方向がドップラー・ログ・ユニット266によって測定される。海流方向はナビゲーション・プロセッサ202に送信される。この方向を使用して、ナビゲーション・プロセッサ202から適切な命令を受信するスラスタ制御プロセッサ240は、スラスタ平均方向がほぼ海流方向と反対になるよう、回転式アクチュエータ65(1)、65(2)を駆動する。このように回転式アクチュエータ65(1)、65(2)が回転している間、スラスタ56(i)のいずれにも動力が供給されていない。システム方向は光ファイバ・ジャイロコンパス256によって測定される。深度はディジクォーツ深度センサ254によって、高度は高度計262によって絶えず測定される。次に、位置決めループが、上式にしたがって計算される平均誤差に対しての平均値および正規分布を使用し、スラスタ56(2)および56(3)に動力を提供して、システム50を所望の位置へと運ぶ。
【0087】
スラスタ56(2)、56(3)によって負荷43を伴うシステム50を所望の座標へ駆動する間、スラスタ56(1)、56(4)を使用して、システム50およびその負荷43の回転を打ち消す。これにより制御が向上する。というのは、特に重い負荷の場合に、回転運動の結果、負荷に他の望ましくない運動が生じることがあり、これは制御が困難だからである。負荷を伴うシステム50が、所望の座標上にある場合、負荷はシステム50とともに巻き上げワイヤ42によって下降する。負荷43の下降中、負荷43はシステム50によって絶えず制御され、これを回転させずに所望の位置に維持する。
【0088】
次の位相では、システム50は例えば海底4から約200m以下である。次に、ドップラー・ログ・ユニット266は底部トラック・モードに入る。これによって、作業は、海底4の標的位置への最終アプローチのため、より正確で高速な応答モードに変化する。次に、ドップラー・ログ・ユニット266および運動センサ256付きのジャイロコンパスを使用して、USBLのランダム・ノイズをフィルタリングする。フィルタリングしたら、正確なシステム50の速度を含むナビゲーション・データの良好な読取りによって、位置制御ループが極めて迅速化かつ安定する。数センチメートルまでの動作制御が獲得される高度に微調整された制御ループが、結果として生じる。次に、ソナー・ユニット260およびドップラー・ログ・ユニット266を使用して、標的ポイントの周囲に関する情報を提供し、したがって負荷43を適正な座標および適正な方向に配置することができる。次に、必要に応じて、スラスタ制御プロセッサ240によって制御されたとおり、スラスタ56(1)、56(4)により負荷43に回転を与えることができる。
【0089】
正規平均誤差を減少させるため、スラスタ56(2)、56(3)に2つの制御ループ、つまり平均誤差制御ループおよびさらなる制御ループを設ける。
【0090】
平均誤差制御ループは、平均誤差を減少させるよう、両方のスラスタ56(2)、56(3)に合わせて動力を等しく調節する。システム50が標的座標に到達するにつれ、スラスタ56(2)、56(3)への駆動出力は、システム50が海流中でその位置を移動できるようなレベルへと減少する。つまり、駆動出力は、最初は平均誤差に比例したレベルに設定された。しかし、システム50が標的座標に近づくにつれ、制御ループはスラスタ56(2)、56(3)に加わる駆動出力を徐々に減少させる。システム50が標的座標に到達するにつれ、スラスタ56(2)、56(3)への駆動出力が海流の強度を打ち消す平衡に到達する。平均誤差制御ループは、両方のスラスタ56(2)、56(3)に等しい記号の等しい力を提供する。
【0091】
正規平均誤差を減少させるため、さらなる制御ループを提供する。このさらなる制御ループは、海流に対して直角の運動が生成されるよう、スラスタ56(2)、56(3)に加えられる個々の力を調節する。さらなる制御ループは、このため、両方のスラスタ56(2)、56(3)に反対の記号の等しい力を加える。正規平均誤差を減少させるためにスラスタ56(2)、56(3)に加えられる力は、システム50が標的座標へと移動するにつれ、ゼロへと直線に減少することが好ましい。平均誤差の垂線がゼロに達したポイントで、海流方向が変化していないと仮定すると、システム50は正確に海底4の標的位置の上に位置し、スラスタ56(2)、56(3)に動力が供給されて、システム50を適正な座標上に維持し、海流を補正する。
【0092】
海流の方向が変化すると、上述した制御ループがスラスタに加わる力を調節し、最終的にシステムの方向を変化させる必要がある。新しい海流方向がシステム50に作用するので、システム50が標的座標から移動するにつれ、正規平均誤差が増加し始める。この効果を克服するため、正規平均誤差のサイズを再び制御して、ゼロへ減少させる。海流またはシステム50の自然のドリフトを打ち消すよう、システムの方向を変更する。
【0093】
回転式アクチュエータ65(1)、65(2)の回転方向は、垂線平均誤差の記号によって画定される。回転式アクチュエータ65(1)、65(2)を必要な位置に回転するのに必要な時間を短縮するため、スラスタ制御プロセッサ240がアルゴリズムを使用して、必要な方向への最短ルートを画定する。
【0094】
例えばナビゲーション・プロセッサ202に接続されたジョイスティック(図示せず)などによる手動制御も配置されることが想定される。
【0095】
システム50の位置決め中に、速度制御も加えることが好ましい。システム50が標的の座標に近づくにつれ、システム50の速度が低下することが好ましい。例えば、システム50と標的間の距離が所定の第1閾値より大きい場合、スラスタは、システム50に最大速度を提供するよう制御される。この第1閾値と標的座標への距離の第2閾値との間に、直線に減少する速度プロファイルを使用し、第2閾値は第1閾値より小さい。第2閾値より小さい距離以内で、システムはほぼゼロの速度に維持される。
【0096】
USBLの測定
USBLの測定原理は、2つの変換器間の正確な位相測定に基づく。1つの実施形態では、短基線(SBL)と超短基線(USBL)との組合せを使用し、それによって位相の曖昧さなく変換器間に大きい距離を使用することができる。USBLでは、正確度は信号対雑音比、および(干渉計測定法のように)変換器間の距離に依存する。次に、寸法に関して距離と流体力学的部品によって制限された周波数の兼ね合いをとる。
【0097】
曖昧さは、SBL測定値を相関データ処理と組み合わせて使用することにより、計算される。信号対雑音比は、このような相関処理の使用によって改善される。下式はUSBLの一般的正確度を画定する。
ここで、σθは標準角偏差、
Lは変換器の距離、
λは波長、
θは方位角である。
【0098】
上記で与えられた式は、変換器の距離Lを増加することによって、つまりアレイを増加させることによって改善されることを示す。さらに、周波数が高くなると正確度が向上する。流体力学的側面および位相の曖昧さがこれらのパラメータを減少させる。信号対雑音比は、相関データ処理を使用することにより増加する。
【0099】
距離および正確度を最適にするため、位相メータ測定には16kHzの周波数を使用することが好ましい。相関プロセスによって、多重通路の識別のために、狭いパルス長を維持しながら、距離範囲を増加させることができる。
【0100】
曖昧さの位相測定のため、システムはSBLで作動して、範囲セクタを判断し、セクタ内のUSBLで作動して、最高の正確さを達成する。
【0101】
範囲は、かなり低い周波数を使用することにより、8000mを上回る距離まで増加してもよい。
【0102】
付録A
カルマン・フィルタ
カルマン・フィルタは、恐らく海洋産業で最もよく知られた技術である。これは、最新の履歴に基づいて計算された予想値に向かう比較に基づいた高速のフィルタリング方法を与える。カルマン・フィルタリングについては詳細しないが、例えばM.S. GrewalおよびA.P. Andrews Prentice Hallによる「Kalman Filtering - Theory and Practice」(ISBN 0-13-211335-X)を参照されたい。
【0103】
位置トラックを速度データ(ドップラー・ログ)と組み合わせることができ、各ポイントは、隣接ポイント、時間の距離および実際の速度に基づいて改善される。カルマン値と改善される速度との間の重みは、ドップラー効率係数によって決定され、値が高いほど速度を考慮に入れる。
利点: 欠点:
非常に高速である かなり「平滑でない」結果
速度で改善できる 速度と位置の最善の組合せではない
【0104】
単純フィルタ
単純フィルタは、全ての位置を急いで調べ、最小の二乗誤差を与える平滑な曲線を計算する。つまりある種の最小二乗適合線である。
利点: 欠点:
高速である ドップラー・ログ・データを使用しない
結果が平滑である 曲線トラックに似ていない
【0105】
サロモンセン・フィルタ
サロモンセン・フィルタはデンマークの数学者でオルフス大学の教授兼博士であるHans Anton Salomonsenにちなんで命名され、高統合フィルタである。これはドップラー・トラックの短期間の安定性を利用し、これを位置トラックの長期の耐性と組み合わせる。
【0106】
説明
フィルタは、トラックに沿って時間を付加した位置データ、さらにドップラー・データがある状況で使用する。ドップラー・データは、通常は非常に精密であるが、絶対位置に関する情報は一切与えない。これに対して、位置データは絶対位置であるが、通常はそれほど精密でない。
【0107】
フィルタは2組のデータを組み合わせて、絶対位置を有する精密なトラックを生成する。これは以下のように実行する。
1.ドップラー・データを使用して、トラック、つまり三次式近似として形成されるトラックの形状を構築する。
2.起点(0,0)から開始し、ドップラー・データによって画定された通りの速度を使用する。
3.次に、位置データを使用してトラックを正確に位置決めする。トラックは、最小二乗技術を使用して可能な限り良好に、位置データに適合するよう並進、回転、および直線に延伸/圧縮される。
4.主に並進となる。しかし、他の変形も、ドップラー・データにあり得る系統的誤差を補正する働きをする。
【0108】
位置データは、2での修正でのみ使用するという事実は、位置データがかなり平均化を課されることを意味する。これは、位置測定の不確定さを減少させる。したがって、多くの位置データがある場合は、トラックの絶対位置が単独の各位置測定よりはるかに精密になると予想される。
H.A.サロモンセン
【0109】
数学的説明
アルゴリズムは5つのステップに分割される
ステップ1:
各ポイントの加速度を計算する
1/2hk+1(X1”+Xk+1”)=Xk+1’−Xk’
ここで
hk=tk−tk−1
tk=速度測定のタイムスタンプ
Xk’=tkにおける速度測定値
Xk”=tkにおける加速度測定値
ステップ2:
加速度および速度、および(以前の速度測定値および加速度に基づいて)以前に計算した位置に基づき、次の位置を計算する。
Xk+1=Sqr(hk+1)/6(2Xk”+Xk+1’)+hk+1Xk’+Xk
ここでXk=tkにおいて計算した位置(速度タイムスタンプ)
ステップ3:
(第1速度測定値を使用して)実際のタイムスタンプで位置を計算する
X(t)=1/2hk+1{((hk+1)^2(t-tk)+1/3(tk+1-t)^3-1/3(hk+1)^3)Xk+1”/3(t-tk)^3Xk+1"}
ここで
X(t)=時間tにおける位置
ステップ4:
第1速度測定値の位置を位置計算値に加算する
ステップ5:
位置計算値を現実の位置線の適合度に合わせて移動、回転、延伸または圧縮する
利点: 欠点
最高のドップラーと位置を組み合わせる 複雑なマトリクスのために遅くなる
全データを考慮に入れる 良好なドップラー・ログに依存する
結果が平滑である
【0110】
サロモンセン光
サロモンセン・フィルタの光バージョンは、NaviBatオンライン・プログラムで最初に導入され、解決の高速化を2つの方法の良い方と組み合わせるよう考案された。
【0111】
オンラインの性質のため、フィルタ・ポイントの決定に履歴を使用するだけである。したがって、結果は線の開始時に比較的粗く、移動するにつれ良好になる。
【0112】
基本操作
フィルタは、リセット・コールから開始して、フィルタを初期化する。リセットは、第1速度測定値を使用して実行される。フィルタは速度と位置のデータ両方を使用する。三次式近似曲線は、速度記録を使用し、位置をこの曲線に可能な限り良好に適合させて生成する。
【0113】
フィルタは、後に処理するため、保存した位置記録を読みとる。
【0114】
速度記録を読み取ったら、「ノット」を作成する。以前の速度記録と現在の速度記録(単位は時間)との間に位置読取り値がある場合は、それを調節して曲線に適合させる。
【0115】
履歴
フィルタ利得パラメータは0から1の値で、ドップラー・ログ・データおよび履歴が流ポイントに及ぼす影響を制御する。
【0116】
1の値では、ライン上にあるドップラー・ログ・データおよび履歴はより大きい重みを有する。値が小さくなるのは、有効な速度記録より多くの位置記録がある場合のみである。
【0117】
有用な値は0.9から1の範囲、例えば0.99である。
【0118】
誤差補正
位置および速度記録は、以前のデータを使用して予測した値と比較することができる。いつデータを拒否するか、制限を設定してもよい。
【0119】
リセット
多くの誤ったデータ・ポイントがある場合は、フィルタがトラックを失う危険がある。オペレータはフィルタを手動でリセットする、つまり履歴を抹殺することができる(自動リセットを設計するために試みられる)。
利点: 欠点
最善のドップラーと位置を組み合わせる ライン開始時に「平滑でない」
高速である
全体的結果が平滑である
ノイズの多いドップラー・データを扱える
【図面の簡単な説明】
【0120】
【図1】沖合石油化学採収専用のFPSO(浮遊、採集、貯蔵および荷下ろしシステム)の略図を示す。
【図2】先行技術によるクレーン船を示し、比較的長いワイヤ・ロープでクレーン・ブロックに装備された負荷を表し、それによって大きい深度では負荷の制御が事実上不可能であることを理解することができる。
【図3】先行技術により海底との間で負荷を配備および/または回収するクレーン船および水中システムを示す。
【図4】水中システムの可能な実施形態の詳細な概要図を示す。
【図4a】回転式スラスタの1つの詳細な概要図を示す。
【図5】上から見た水中システムを示す。
【図6a】幾つかの検出器を伴う主要モジュールの下側を示す。
【図6b】幾つかの検出器を伴う主要モジュールの下側を示す。
【図7a】船舶上の電子機器の略ブロック図を示す。
【図7b】音線に関する、および水中システムに関する電子機器の略ブロック図を示す。
【図8】水中システムをその標的位置へと駆動する間に使用する3つの異なる座標系の定義を示す。
【符号の説明】
【0121】
50 水中システム
51 主モジュール
52 カウンタ・モジュール
56 スラスタ
57 ジャッキ
58 ジャッキ
200 電子機器
249 水中電子機器
250 音響アレイ
252 ジャイロコンパス
258 音速メータ
260 ソナー機器
266 トップラー・ログ
【特許請求の範囲】
【請求項1】
船舶上の、音響プロセッサ(224)と、表面位置決め機器DGPSにインターフェース接続されたナビゲーション・プロセッサ(202)であって、
該ナビゲーション・プロセッサ(202)は、共通の座標系である第1の座標系における水中システム(50)の姿勢および絶対座標を計算するため、
i. 前記表面位置決め機器DGPSからの位置データ、
ii. 上下浮動、横揺れおよび縦揺れセンサを含む水中システム(50)上の光ファイバ・ジャイロコンパス(256)からのデータ、
iii. 水中システム(50)からの深度データ、
iv. 水中システム(50)上のドップラー・ログ・ユニット(266)に基づいての水中システム(50)の速度データ、
v. 前記音響プロセッサ(224)からの、システム(50)の距離及び方位データ
を受信するナビゲーション・プロセッサ。
【請求項2】
前記共通の座標系は前記ナビゲーション・プロセッサ(202)とスラスタ制御プロセッサ(240)の間に確立され、該スラスタ制御プロセッサは該ナビゲーション・プロセッサ(202)とインターフェース接続され、水中システム(50)上のスラスタを制御する、請求項1に記載のナビゲーション・プロセッサ(202)。
【請求項3】
前記ナビゲーション・プロセッサは、前記表面位置決め機器DGPSからの位置データに基づいて船舶の姿勢を計算する、請求項1に記載のナビゲーション・プロセッサ(202)。
【請求項4】
前記ナビゲーション・プロセッサは、前記表面位置決め機器DGPSからの位置データに基づいて船舶の固定オフセットを計算する、請求項1に記載のナビゲーション・プロセッサ(202)。
【請求項5】
前記水中システム(50)は少なくとも2つのスラスタを備え、前記ナビゲーション・プロセッサ(202)は、該少なくとも2つのスラスタにより、スラスタ平均方向への駆動力を制御するように構成され、このスラスタ平均方向は垂線とともに第2座標系を画定する、請求項2に記載のナビゲーション・プロセッサ(202)。
【請求項6】
スラスタを相互接続する線に直角の方向として定義されるシステム方向に対して画定される第3座標系を用いるように構成される、請求項5に記載のナビゲーション・プロセッサ(202)。
【請求項7】
平均誤差方向に平行な第1の成分と、該平均誤差方向に直角の成分とに分割できる誤差ベクトルに関して定義することができる水中システム(50)が辿る経路の誤差を計算できるように構成される、請求項5に記載のナビゲーション・プロセッサ(202)。
【請求項8】
船舶のジャイロコンパス(206)から船舶の方向を受信されるように構成される、請求項1記載のナビゲーション・プロセッサ(202)。
【請求項9】
制御ループを実行して前記水中システム(50)の方向及び位置を制御するとともに所望の方向及び位置をオペレータから受け取るように構成される、請求項2に記載のナビゲーション・プロセッサ(202)。
【請求項10】
前記音響プロセッサ(224)が、前記水中システム(50)を取り巻く海水の局所的温度と塩分のうちの少なくとも1つのデータ及び該温度と塩分のうちの少なくとも1つ海水の深度の関数としてのデータを受け取り、そして、これらのデータを、海水を通る音波の屈折を判断し、したがってシステム(50)の位置の計算を補正するためにも使用するように構成される、請求項1に記載のナビゲーション・プロセッサ(202)。
【請求項11】
前記音響プロセッサ(224)が、カルマン・フィルタ及びサロモンセン・フィルタを含む群から選択された平滑用フィルタを用いるようにされる、請求項1に記載のナビゲーション・プロセッサ(202)。
【請求項12】
ナビゲーション・プロセッサ(202)と音響プロセッサ(224)を備え、該ナビゲーション・プロセッサ(202)は音響プロセッサ(224)と船舶(20)上の表面位置決め機器DGPSにインターフェース接続された処理構成で、
該ナビゲーション・プロセッサ(202)は、共通の座標系である第1の座標系における水中システム(50)の姿勢および絶対座標を計算するため、
i. 前記表面位置決め機器DGPSからの位置データ、
ii. 上下浮動、横揺れおよび縦揺れセンサを含む水中システム(50)上の光ファイバ・ジャイロコンパス(256)からのデータ、
iii. 水中システム(50)からの深度データ、
iv. 水中システム(50)上のドップラー・ログ・ユニット(266)に基づいての水中システム(50)の速度データ、
v. 前記音響プロセッサ(224)からの、システム(50)の距離及び方位データ
を受信し、前記ナビゲーション・プロセッサ(202)と音響プロセッサ(224)は1つ又は複数のコンピュータによって実現される、処理構成。
【請求項13】
ナビゲーション・プロセッサ(202)と音響プロセッサ(224)と水中システム(50)を備える測定システムであって、該ナビゲーション・プロセッサ(202)は音響プロセッサ(224)と船舶(20)上の表面位置決め機器DGPSにインターフェース接続され、前記水中システム(50)は光ファイバ・ジャイロコンパスとドップラー・ログ・ユニットと深度センサを備え、前記光ファイバ・ジャイロコンパスは上下浮動、横揺れおよび縦揺れセンサを含み、該ナビゲーション・プロセッサ(202)は、共通の座標系である第1の座標系における水中システム(50)の姿勢および絶対座標を計算するため、
i. 前記表面位置決め機器DGPSからの位置データ、
ii. 上下浮動、横揺れおよび縦揺れセンサを含む水中システム(50)上の光ファイバ・ジャイロコンパス(256)からのデータ、
iii. 水中システム(50)からの深度データ、
iv. 水中システム(50)上のドップラー・ログ・ユニット(266)に基づいての水中システム(50)の速度データ、
v. 前記音響プロセッサ(224)からの、システム(50)の距離及び方位データ
を受信する測定システム。
【請求項14】
前記深度センサはディジクォーツ深度センサである、請求項13に記載の測定システム。
【請求項15】
前記共通の座標系は前記ナビゲーション・プロセッサ(202)とスラスタ制御プロセッサの間に確立され、該スラスタ制御プロセッサは該ナビゲーション・プロセッサ(202)とインターフェース接続され、水中システム(50)上のスラスタを制御する、請求項13に記載の測定システム。
【請求項16】
前記水中システム(50)は少なくとも2つのスラスタを備え、前記ナビゲーション・プロセッサ(202)は、該少なくとも2つのスラスタにより、スラスタ平均方向への駆動力を制御するように構成され、このスラスタ平均方向は垂線とともに第2座標系を画定する、請求項15に記載の測定システム。
【請求項17】
前記ナビゲーション・プロセッサ(202)は、スラスタを相互接続する線に直角の方向として定義されるシステム方向に対して画定される第3座標系を用いるように構成されている、請求項16に記載の測定システム。
【請求項18】
前記ナビゲーション・プロセッサ(202)は、平均誤差方向に平行な第1の成分と、該平均誤差方向に直角の成分とに分割できる誤差ベクトルに関して定義することができる水中システム(50)が辿る経路の誤差を計算できるように構成されている、請求項17に記載の測定システム。
【請求項19】
前記ナビゲーション・プロセッサ(202)は、船舶のジャイロコンパス(206)から船舶の方向を受信されるように構成される、請求項13に記載の測定システム。
【請求項20】
前記ナビゲーション・プロセッサ(202)は、制御ループを実行して前記水中システム(50)の方向及び位置を制御するとともに所望の方向及び位置をオペレータから受け取るように構成される、請求項13に記載の測定システム。
【請求項21】
前記音響プロセッサ(224)が、前記水中システム(50)を取り巻く海水の局所的温度と塩分のうちの少なくとも1つのデータ及び該温度と塩分のうちの少なくとも1つ海水の深度の関数としてのデータを受け取り、そして、これらのデータを、海水を通る音波の屈折を判断し、したがってシステム(50)の位置の計算を補正するためにも使用するように構成される、請求項13に記載の測定システム。
【請求項22】
前記音響プロセッサ(224)が、カルマン・フィルタ及びサロモンセン・フィルタを含む群から選択された平滑用フィルタを用いるようにされる、請求項21に記載の測定システム。
【請求項23】
船舶上の、ナビゲーション・プロセッサ(202)を用いて水中システム(50)の位置及び姿勢を測定する方法であって、共通の座標系である第1の座標系における水中システム(50)の姿勢および絶対座標を計算するため、
i. 前記表面位置決め機器DGPSからの位置データを受信するステップと、
ii. 上下浮動、横揺れおよび縦揺れセンサを含む水中システム(50)上の光ファイバ・ジャイロコンパス(256)からのデータを受信するステップと、
iii. 水中システム(50)からの深度データを受信するステップと、
iv. 水中システム(50)上のドップラー・ログ・ユニット(266)に基づいての水中システム(50)の速度データを受信するステップと、
v. 前記音響プロセッサ(224)からの、システム(50)の距離及び方位データ
を受信するステップと
を備える方法。
【請求項24】
前記共通の座標系は前記ナビゲーション・プロセッサ(202)とスラスタ制御プロセッサ(240)の間に確立され、該スラスタ制御プロセッサは該ナビゲーション・プロセッサ(202)とインターフェース接続され、水中システム(50)上のスラスタを制御する、請求項23に記載の方法。
【請求項1】
船舶上の、音響プロセッサ(224)と、表面位置決め機器DGPSにインターフェース接続されたナビゲーション・プロセッサ(202)であって、
該ナビゲーション・プロセッサ(202)は、共通の座標系である第1の座標系における水中システム(50)の姿勢および絶対座標を計算するため、
i. 前記表面位置決め機器DGPSからの位置データ、
ii. 上下浮動、横揺れおよび縦揺れセンサを含む水中システム(50)上の光ファイバ・ジャイロコンパス(256)からのデータ、
iii. 水中システム(50)からの深度データ、
iv. 水中システム(50)上のドップラー・ログ・ユニット(266)に基づいての水中システム(50)の速度データ、
v. 前記音響プロセッサ(224)からの、システム(50)の距離及び方位データ
を受信するナビゲーション・プロセッサ。
【請求項2】
前記共通の座標系は前記ナビゲーション・プロセッサ(202)とスラスタ制御プロセッサ(240)の間に確立され、該スラスタ制御プロセッサは該ナビゲーション・プロセッサ(202)とインターフェース接続され、水中システム(50)上のスラスタを制御する、請求項1に記載のナビゲーション・プロセッサ(202)。
【請求項3】
前記ナビゲーション・プロセッサは、前記表面位置決め機器DGPSからの位置データに基づいて船舶の姿勢を計算する、請求項1に記載のナビゲーション・プロセッサ(202)。
【請求項4】
前記ナビゲーション・プロセッサは、前記表面位置決め機器DGPSからの位置データに基づいて船舶の固定オフセットを計算する、請求項1に記載のナビゲーション・プロセッサ(202)。
【請求項5】
前記水中システム(50)は少なくとも2つのスラスタを備え、前記ナビゲーション・プロセッサ(202)は、該少なくとも2つのスラスタにより、スラスタ平均方向への駆動力を制御するように構成され、このスラスタ平均方向は垂線とともに第2座標系を画定する、請求項2に記載のナビゲーション・プロセッサ(202)。
【請求項6】
スラスタを相互接続する線に直角の方向として定義されるシステム方向に対して画定される第3座標系を用いるように構成される、請求項5に記載のナビゲーション・プロセッサ(202)。
【請求項7】
平均誤差方向に平行な第1の成分と、該平均誤差方向に直角の成分とに分割できる誤差ベクトルに関して定義することができる水中システム(50)が辿る経路の誤差を計算できるように構成される、請求項5に記載のナビゲーション・プロセッサ(202)。
【請求項8】
船舶のジャイロコンパス(206)から船舶の方向を受信されるように構成される、請求項1記載のナビゲーション・プロセッサ(202)。
【請求項9】
制御ループを実行して前記水中システム(50)の方向及び位置を制御するとともに所望の方向及び位置をオペレータから受け取るように構成される、請求項2に記載のナビゲーション・プロセッサ(202)。
【請求項10】
前記音響プロセッサ(224)が、前記水中システム(50)を取り巻く海水の局所的温度と塩分のうちの少なくとも1つのデータ及び該温度と塩分のうちの少なくとも1つ海水の深度の関数としてのデータを受け取り、そして、これらのデータを、海水を通る音波の屈折を判断し、したがってシステム(50)の位置の計算を補正するためにも使用するように構成される、請求項1に記載のナビゲーション・プロセッサ(202)。
【請求項11】
前記音響プロセッサ(224)が、カルマン・フィルタ及びサロモンセン・フィルタを含む群から選択された平滑用フィルタを用いるようにされる、請求項1に記載のナビゲーション・プロセッサ(202)。
【請求項12】
ナビゲーション・プロセッサ(202)と音響プロセッサ(224)を備え、該ナビゲーション・プロセッサ(202)は音響プロセッサ(224)と船舶(20)上の表面位置決め機器DGPSにインターフェース接続された処理構成で、
該ナビゲーション・プロセッサ(202)は、共通の座標系である第1の座標系における水中システム(50)の姿勢および絶対座標を計算するため、
i. 前記表面位置決め機器DGPSからの位置データ、
ii. 上下浮動、横揺れおよび縦揺れセンサを含む水中システム(50)上の光ファイバ・ジャイロコンパス(256)からのデータ、
iii. 水中システム(50)からの深度データ、
iv. 水中システム(50)上のドップラー・ログ・ユニット(266)に基づいての水中システム(50)の速度データ、
v. 前記音響プロセッサ(224)からの、システム(50)の距離及び方位データ
を受信し、前記ナビゲーション・プロセッサ(202)と音響プロセッサ(224)は1つ又は複数のコンピュータによって実現される、処理構成。
【請求項13】
ナビゲーション・プロセッサ(202)と音響プロセッサ(224)と水中システム(50)を備える測定システムであって、該ナビゲーション・プロセッサ(202)は音響プロセッサ(224)と船舶(20)上の表面位置決め機器DGPSにインターフェース接続され、前記水中システム(50)は光ファイバ・ジャイロコンパスとドップラー・ログ・ユニットと深度センサを備え、前記光ファイバ・ジャイロコンパスは上下浮動、横揺れおよび縦揺れセンサを含み、該ナビゲーション・プロセッサ(202)は、共通の座標系である第1の座標系における水中システム(50)の姿勢および絶対座標を計算するため、
i. 前記表面位置決め機器DGPSからの位置データ、
ii. 上下浮動、横揺れおよび縦揺れセンサを含む水中システム(50)上の光ファイバ・ジャイロコンパス(256)からのデータ、
iii. 水中システム(50)からの深度データ、
iv. 水中システム(50)上のドップラー・ログ・ユニット(266)に基づいての水中システム(50)の速度データ、
v. 前記音響プロセッサ(224)からの、システム(50)の距離及び方位データ
を受信する測定システム。
【請求項14】
前記深度センサはディジクォーツ深度センサである、請求項13に記載の測定システム。
【請求項15】
前記共通の座標系は前記ナビゲーション・プロセッサ(202)とスラスタ制御プロセッサの間に確立され、該スラスタ制御プロセッサは該ナビゲーション・プロセッサ(202)とインターフェース接続され、水中システム(50)上のスラスタを制御する、請求項13に記載の測定システム。
【請求項16】
前記水中システム(50)は少なくとも2つのスラスタを備え、前記ナビゲーション・プロセッサ(202)は、該少なくとも2つのスラスタにより、スラスタ平均方向への駆動力を制御するように構成され、このスラスタ平均方向は垂線とともに第2座標系を画定する、請求項15に記載の測定システム。
【請求項17】
前記ナビゲーション・プロセッサ(202)は、スラスタを相互接続する線に直角の方向として定義されるシステム方向に対して画定される第3座標系を用いるように構成されている、請求項16に記載の測定システム。
【請求項18】
前記ナビゲーション・プロセッサ(202)は、平均誤差方向に平行な第1の成分と、該平均誤差方向に直角の成分とに分割できる誤差ベクトルに関して定義することができる水中システム(50)が辿る経路の誤差を計算できるように構成されている、請求項17に記載の測定システム。
【請求項19】
前記ナビゲーション・プロセッサ(202)は、船舶のジャイロコンパス(206)から船舶の方向を受信されるように構成される、請求項13に記載の測定システム。
【請求項20】
前記ナビゲーション・プロセッサ(202)は、制御ループを実行して前記水中システム(50)の方向及び位置を制御するとともに所望の方向及び位置をオペレータから受け取るように構成される、請求項13に記載の測定システム。
【請求項21】
前記音響プロセッサ(224)が、前記水中システム(50)を取り巻く海水の局所的温度と塩分のうちの少なくとも1つのデータ及び該温度と塩分のうちの少なくとも1つ海水の深度の関数としてのデータを受け取り、そして、これらのデータを、海水を通る音波の屈折を判断し、したがってシステム(50)の位置の計算を補正するためにも使用するように構成される、請求項13に記載の測定システム。
【請求項22】
前記音響プロセッサ(224)が、カルマン・フィルタ及びサロモンセン・フィルタを含む群から選択された平滑用フィルタを用いるようにされる、請求項21に記載の測定システム。
【請求項23】
船舶上の、ナビゲーション・プロセッサ(202)を用いて水中システム(50)の位置及び姿勢を測定する方法であって、共通の座標系である第1の座標系における水中システム(50)の姿勢および絶対座標を計算するため、
i. 前記表面位置決め機器DGPSからの位置データを受信するステップと、
ii. 上下浮動、横揺れおよび縦揺れセンサを含む水中システム(50)上の光ファイバ・ジャイロコンパス(256)からのデータを受信するステップと、
iii. 水中システム(50)からの深度データを受信するステップと、
iv. 水中システム(50)上のドップラー・ログ・ユニット(266)に基づいての水中システム(50)の速度データを受信するステップと、
v. 前記音響プロセッサ(224)からの、システム(50)の距離及び方位データ
を受信するステップと
を備える方法。
【請求項24】
前記共通の座標系は前記ナビゲーション・プロセッサ(202)とスラスタ制御プロセッサ(240)の間に確立され、該スラスタ制御プロセッサは該ナビゲーション・プロセッサ(202)とインターフェース接続され、水中システム(50)上のスラスタを制御する、請求項23に記載の方法。
【図1】

【図2】
【図3】
【図4】
【図4a】
【図5】
【図6a】
【図6b】
【図7a】
【図7b】
【図8】
【図2】
【図3】
【図4】
【図4a】
【図5】
【図6a】
【図6b】
【図7a】
【図7b】
【図8】
【公開番号】特開2009−47699(P2009−47699A)
【公開日】平成21年3月5日(2009.3.5)
【国際特許分類】
【出願番号】特願2008−209115(P2008−209115)
【出願日】平成20年8月15日(2008.8.15)
【分割の表示】特願2001−568789(P2001−568789)の分割
【原出願日】平成12年3月20日(2000.3.20)
【出願人】(500543731)
【Fターム(参考)】
【公開日】平成21年3月5日(2009.3.5)
【国際特許分類】
【出願日】平成20年8月15日(2008.8.15)
【分割の表示】特願2001−568789(P2001−568789)の分割
【原出願日】平成12年3月20日(2000.3.20)
【出願人】(500543731)
【Fターム(参考)】
[ Back to top ]