
ナビゲーション端末及びその位置の取得方法
【課題】設備コストを抑え且つ所定精度を確保して端末の位置を取得できるようにする。
【解決手段】ランドマーク距離決定部3はランドマークLMkからの測位信号で端末1との間の距離を決定し、代表位置設定部4はマップ情報より、ランドマークを中心とし決定距離に等しい円上にあり、且つ端末1が移動可能な通路区画上にある位置から、端末1の候補位置としての代表位置を設定する。自律航法位置推定部6は自律航法によりランドマークから移動してきた端末1の位置を推定する。端末位置補正部7は、推定位置と代表位置とに基づく補正処理により、端末1の位置を取得する。
【解決手段】ランドマーク距離決定部3はランドマークLMkからの測位信号で端末1との間の距離を決定し、代表位置設定部4はマップ情報より、ランドマークを中心とし決定距離に等しい円上にあり、且つ端末1が移動可能な通路区画上にある位置から、端末1の候補位置としての代表位置を設定する。自律航法位置推定部6は自律航法によりランドマークから移動してきた端末1の位置を推定する。端末位置補正部7は、推定位置と代表位置とに基づく補正処理により、端末1の位置を取得する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ランドマークからの測位信号、自律航法及びマップ情報を組み合わせて利用した、自身の位置を取得するナビゲーション端末及びその位置の取得方法に関する。
【背景技術】
【0002】
GPS(全地球測位システム;Global Positioning System)を用いた携帯端末での位置情報サービスの広がりに伴い、屋内でも利用可能な位置取得方式のニーズが高まっている。GPS信号が受信できない屋内等において現在位置を測定するのに適した方法の1つとして、非特許文献1〜3等に開示されたTDOA (到来時間差;Time Difference of Arrival)システム等が知られている。
【0003】
TDOAシステムにおいては、適当な間隔にて設置された複数のランドマーク装置が、周期的に距離測定のための信号、すなわち、音波信号と無線信号とを含む測位信号を送信する。この際、各ランドマーク装置は、ほぼ同時に測位信号を送信する様に制御されており、測位信号には、当該無線信号を送信したランドマーク装置の設置位置についての情報が含まれている。
【0004】
端末が、あるランドマーク装置からの無線信号を時刻t1に、このランドマーク装置から音波信号を時刻t2に受信したものとすると、端末と当該ランドマーク装置との距離は、音速×(t2−t1)で計算することができる。ランドマーク装置からの無線信号には、当該ランドマークの位置情報が含まれているため、端末は3つ以上のランドマーク装置との距離を測定することで、自身の現在位置を計算することができる。
【0005】
また、屋内利用可能な現在位置測定手法の1つとして、非特許文献4〜6等に開示された自律航法(慣性航法)がある。自律航法によれば、TDOAシステムにおけるランドマークのような環境側の設備を必要とせず、自律的に位置を推定することが可能である。自律航法は、ジャイロスコープや加速度センサ等を搭載した端末を用い、基準点からの移動方向と相対的な移動距離を累積的に求める方法である。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】Shinichi Minamimoto, Sae Fuji, Hirozumi Yamguchi and Teruo HIgashino, "Local Map Generation using Position and Communication History of Mobile node", IEEE percom 2010, p2-10, 2010.
【非特許文献2】S.Venkatesh, and R.M. Buehrer, "NLOS Mitigation Using Linear Programming in Ultrawideband Location-aware Networks," IEEE Trans. On vehicular technology, Vol.56, No.5, Sep.2007.
【非特許文献3】Lui, K.W.K., So, H.C., and Ma, W.-K. "Maximum A Posteriori Approach to Time-of-Arrival-Based Localization in Non-Line-of-Sight Environment," Vehicular Technology, IEEE Transactions on Vol.59, Issue.3, pp. 1517 - 1523, 2010.
【非特許文献4】Daisuke KAMISAKA, Shigeki MURAMATSU, Takeshi IWAMOTO and Hiroyuki YOKOYAMA, "Design and Implementation of Pedestrian Dead Reckoning System on a Mobile Phone", IEICE Transactions on Information and Systems, Vol.E94. No. 6, pp1137-1146, 2011.
【非特許文献5】U. Steinhoff and B.Schiele, "Dead reckoning from the pocket- An experimental study," In Proceedings of PerCom 2010.
【非特許文献6】Georg GARTNER & Andrew FRANK & Gunther RETSCHER, "Pedestrian Navigation System in Mixed Indoor/Outdoor Environment"
【発明の概要】
【発明が解決しようとする課題】
【0007】
TDOAシステムにおいて、位置検出装置を携帯して移動しながら位置を測定する場合、ランドマーク数は通常5個以上必要となり、当該5個以上のランドマークを用いて現在位置の推定を行い、推定値により補正した測定値を出力することが行われている。よって、特に大規模な屋内環境をカバーしようとすると、コスト面での導入障壁が大きいという課題がある。すなわち、当該大規模環境内の全ての位置で常に5個以上のランドマークから測位信号を受信できるようにランドマークを配置する必要があり、多数のランドマークが必要となるため、コストが高くなってしまう。
【0008】
また、自律航法には、屋内に長時間滞在している場合の精度の確保が困難になるという課題がある。すなわち、自律航法は角速度と加速度の積分を利用するため、航空機、船舶または自動車などのナビゲーションには適しているが、複雑な動作を伴う人間の歩行の場合は特に、累積されてくる誤差の大きさが無視できない。そのため、人間の歩行に適用するためには、端末保持の手法に厳しい制約を課すと共に、歩行によって発生したセンサデータの特徴を捉えて精度を高める必要があるが、それでも依然として誤差の累積は避けられない。
【0009】
本発明の目的は、上記の従来技術の課題を解決し、屋内でも利用可能であって設備導入コストが低く、かつ、所定の精度を確保して妥当な位置を取得することができる、ナビゲーション端末及びその端末の位置の取得方法を提供することにある。
【課題を解決するための手段】
【0010】
上記従来技術の課題を解決するため、本発明は、自身の位置を取得するナビゲーション端末であって、所定位置に配置されたランドマークからの測位信号を受信して該ランドマークと前記ナビゲーション端末との距離を決定するランドマーク距離決定部と、前記ランドマークの位置情報と、前記ランドマークの周辺における、前記ナビゲーション端末が移動可能な通路区画の情報を含んだマップ情報とを保持するマップ情報保持部と、センサ部と、前記センサ部からの出力に自律航法を適用して前記ナビゲーション端末の推定位置を求める自律航法位置推定部と、前記マップ情報を参照して、前記ランドマークを中心として前記決定された距離に等しい半径の円と前記通路区画との重なり部分として得られる円弧の各々から、前記ナビゲーション端末の代表位置を設定する代表位置設定部と、前記推定位置及び前記代表位置の各々並びに当該推定位置と代表位置の各々との距離に基づいて前記ナビゲーション端末の位置を取得する端末位置補正部とを備えることを特徴とする。
【0011】
また、上記従来技術の課題を解決するため、本発明は、端末の位置の取得方法であって、所定位置に配置されたランドマークが送信する測位信号を受信して、該ランドマークと前記端末との距離を決定するステップと、前記ランドマークの位置情報と、前記ランドマークの周辺における、前記端末が移動可能な通路区画の情報とを含んだマップ情報を取得するステップと、前記端末が備えるセンサからの出力に自律航法を適用して、前記端末の推定位置を求めるステップと、前記マップ情報を参照して、前記ランドマークを中心として前記決定された距離に等しい半径の円と前記通路区画との重なり部分として得られる円弧の各々から、前記端末の代表位置を設定するステップと、前記推定位置及び前記代表位置の各々並びに当該推定位置と代表位置の各々との距離に基づいて前記端末の位置を取得するステップとを備えることを特徴とする。
【発明の効果】
【0012】
本発明によれば、測位信号から定まる、端末が高精度でその上に位置していると判断されるランドマークを中心とする円と、マップ情報より定まる、端末が移動可能である領域としての通路区分との重なり部分より、端末が存在する候補位置としての代表位置を複数求め、精度が問題となる自律航法による端末の推定位置を当該複数の代表位置と照らし合わせることで端末の位置を取得する。
【0013】
よって、精度が問題となる自律航法の推定位置が、代表位置によって補正され、妥当な端末の位置を取得することができる。当該補正の際に、推定位置と代表位置との距離を考慮して、例えば当該距離が小さい方の代表位置により重みを付与することなどができる。かつ、当該取得に際しては、1つのランドマークの測位信号を用いて、当該ランドマークとの距離が利用できればよい。よって、端末が一度に複数のランドマークからの測位信号を利用する必要はないため、ランドマーク数が低減される。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態に係るナビゲーション端末の機能ブロック図である。
【図2】本発明の実施形態に係るナビゲーションシステムの概要構成を説明するための図である。
【図3】本発明の実施形態に係る端末の位置取得方法のフローチャートである。
【図4】端末の各機能ブロックが取得するデータを説明するための図である。
【図5】本発明の実施形態に係る位置補正などのフローチャートである。
【図6】位置設定部の設定する代表位置を説明するための図である。
【図7】図5のフローにおける場合(1)における暫定位置の計算例を示すための図である。
【図8】図5のフローにおける場合(1)における暫定位置に修正を加える例を説明するための図である。
【図9】図5のフローにおける場合(2)における暫定位置の決定の一実施例を説明するための図である。
【図10】図5のフローにおける場合(2)における暫定位置に修正を加える例を説明するための図である。
【図11】本発明におけるランドマークとその周囲の通路区画との配置の例を示すための図である。
【発明を実施するための形態】
【0015】
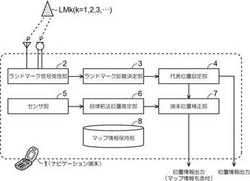
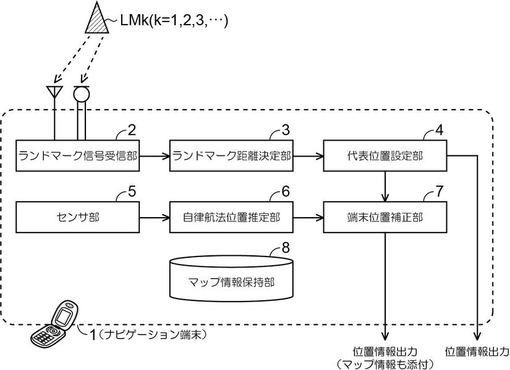
図1は、本発明の実施例に係る、自身の位置を取得するナビゲーション端末の機能ブロック図である。ナビゲーション端末1(端末1と略称する)はランドマーク信号受信部2、ランドマーク距離決定部3、代表位置設定部4、センサ部5、自律航法位置推定部6、端末位置補正部7及びマップ情報保持部8を備える。
【0016】
ランドマーク信号受信部2は、所定の参照位置に固定して配置されたランドマークLMk(k=1,2,3、…)のうち、いずれかからの測位信号(電波信号及び音波信号)を受信する。ランドマーク距離決定部3は、当該受信した測位信号より信号を送信したランドマークのID等を識別すると共に、TDOAの手法に従って受信信号を解析し、音波が到達するのに要した時間を求めて音速に乗算することで、端末1と当該ランドマークLMkとの距離を算出する。
【0017】
代表位置設定部4は、マップ情報保持部8にて保持されているマップ情報を利用することで、ランドマークLMkからの距離がランドマーク距離決定部3により決定された距離を満たす円上より、端末1の存在しうる候補位置としての、複数の代表位置を設定する。当該処理については後述する。
【0018】
センサ部5は各種の自律航法用のセンサ、例えば各々3軸の加速度センサ、地磁気センサ及びジャイロセンサなどを含む。自律航法位置推定部6は、センサ部5の出力に自律航法を適用して端末1の位置を推定すると共に、後述の推定距離を求める。当該推定は後述の所定タイミングにて開始され、当該開始時における位置を基準位置として端末1が移動した位置が、センサ出力に対する積算処理により推定される。
【0019】
端末位置補正部7は後述するように、代表位置設定部4が設定した代表位置と自律航法位置推定部6が推定した位置との両者を用いて補正を行うことで、最終結果としての端末1の位置情報を求め、必要に応じてマップ情報と共に、例えばマップ上で位置情報を表示するなどして、ユーザに提示する。当該補正は例えば、推定位置と代表位置との距離に基づいて、より近い側の代表位置に重みを付与することにより行われる。
【0020】
ユーザへの提示の際、端末1における不図示の入力部より予めユーザからの目的地の入力を受け付けておき、当該求められた端末1の位置情報を現在位置として、周知の経路案内技術を適用し、目的地までの経路と共にユーザに提示してもよい。マップ情報保持部8は、必要に応じて参照可能なようにマップ情報を保持する。
【0021】
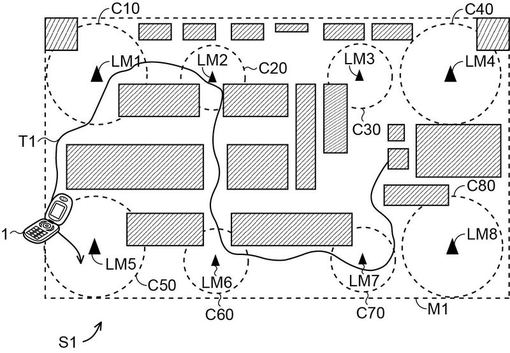
図2は、本発明の実施例に係る端末1の位置のナビゲーションシステムの構成を概要的に説明する図である。ナビゲーションシステムS1においては、各ランドマークLMk(ここでは例としてk=1,2,…,8)及び矩形の斜線領域で表記している複数の店舗等が、GPSの利用できない又は利用困難な屋内等の対象エリアに配置されている。当該所定の配置等の情報は、マップ情報保持部8で保持されるマップ情報M1に記載されている。当該配置構成された対象エリア内において、軌跡T1(端末1の実際の位置の軌跡)を描いて移動する端末1の妥当な位置が本発明により取得される。
【0022】
マップ情報M1には、各ランドマークLMkの位置情報と、ユーザ及び端末1が移動可能な領域としての通路等の情報と、壁などの存在によって当該通路等から直接ユーザ及び端末1が移動することができない領域としての店舗等の情報とが含まれる。すなわち、対象エリアにおける各領域の形状及び位置情報や、各領域のユーザ及び端末1の通行・移動可否の情報がマップ情報M1に含まれる。
【0023】
各ランドマークLMkには、送信したTDOAの測位信号を端末1において受信可能な所定の範囲Ci(ここではLMkにおけるk=1,2,…,8にそれぞれ対応する例としてi=10,20,…,80)が存在する。本発明においては信号の反射や干渉は考慮しないものとし、各範囲Ciは、各ランドマークLMk及び端末1の信号送受信性能によって定まる所定半径の円形領域である。
【0024】
ナビゲーションシステムS1は、上記の各範囲Ci同士が互いに重複することがないように構成され、当該構成はマップ情報M1に記録されている。すなわち、ナビゲーションシステムS1において端末1は、その位置に応じて測位信号を受信可能又は不可能であって、受信可能な場合は、常にランドマークLMkのうちの1個からのみ受信することとなり、2個以上から受信することはない。
【0025】
このように本発明では、従来技術におけるTDOAシステムで原理上少なくとも3つの、また、精度を考慮すれば5つのランドマークからの測位信号を端末において受信する必要があるのに比べて、測位信号は1つのみ利用できればよい。よって本発明では、同じ面積のエリアにナビゲーションシステムS1を構築する際のランドマークLMkの数が従来技術よりも低減され、コスト低減の効果がある。
【0026】
図3に、本発明の実施形態に係るナビゲーションシステムS1における、端末1の位置の取得方法のフローチャートを示す。図3を説明するためにまず、図4を用いて端末1を構成する各機能ブロックが取得するデータについて説明する。
【0027】
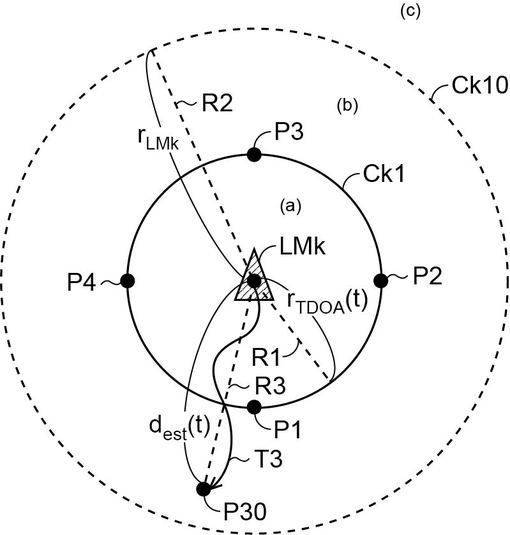
図4においては、あるランドマークLMkが図内中央に配置されている。図示するrTDOA(t)は、ランドマーク距離決定部3により決定されるLMkと端末1との距離であり、各時刻tにつき決定され、端末1の移動に応じてその値は適宜変化する。
【0028】
円Ck1は、ランドマークLMkの位置を中心とし、その半径R1の長さがrTDOA(t)となる円である。ここで本発明の前提として、次の事項がある。ランドマーク距離決定部3の決定する距離の精度は、誤差の累積が起こらないために、自律航法位置推定部5が推定する位置の精度より高い。そして端末1は、ランドマーク距離決定部3が距離を決定して定める当該円Ck1上のいずれかの点に、十分な精度で位置している。本発明の説明において特に、当該円Ck1を「決定円」と呼ぶこととする。
【0029】
代表位置設定部4は、当該端末1が位置していると判断される決定円Ck1の円周上から、マップ情報を利用して後述のように所定の代表位置を設定する。図4では代表位置の例として、決定円Ck1上の4点P1,P2,P3及びP4が示されている。なお、当該代表位置P1乃至P4は、半径の値rTDOA(t)と共に決定円Ck1が時刻tの経過に伴う端末1の移動に応じて大きさを変えるのに従って、決定円Ck1上に位置しながら移動することとなる。また代表位置はその個数を含めて、マップ情報より定まる。
【0030】
円Ck10はランドマークLMkの位置を中心とし、その半径R2の長さが図示するrLMkとなる円である。ここで長さrLMkはランドマークLMkからの測位信号を端末1が受信可能な最大長である。すなわち、円Ck10は図2においてランドマークLM1〜LM8に対して示した円C10〜C80と同様である。よって、円Ck10の外部に存在する場合、端末1はランドマークLM1からの距離rTDOA(t)を決定することができない。
【0031】
軌跡T3は、自律航法位置推定部6が推定する端末1の位置の軌跡である。また、当該時刻tにおける移動軌跡上の位置すなわち推定位置がP30である。距離dest(t)は、推定位置P30とランドマークLMkの位置とをつなぐ線分R3の長さに等しく、自律航法位置推定部6は当該距離を推定距離dest(t)として求める。
【0032】
自律航法位置推定部6の精度がランドマーク距離決定部3と同程度に十分に高ければ、推定位置P30は実際の端末1の位置を十分な精度で表すこととなり、従って、決定円Ck1上に存在することとなる。しかし、自律航法の精度には限度があるため、一般に推定位置P30は決定円Ck1上には存在せず、(a)に示すように決定円Ck1内部にある場合(R3<R1となる)も、(b)に示すように決定円Ck1外部で且つ円Ck10内部にある場合(R1<R3<R2;図4ではこの場合が描かれている)も、また(c)に示すように円Ck10外部にある場合(R3>R2となる)もありうる。なお、(c)の場合はもはや決定円Ck1は求められない。本発明においては、推定位置P30と、決定円Ck1上の代表位置(当該例においてはP1乃至P4)とを用いて、図3のフローに従って端末1の位置として妥当性の高い位置を決定する。
【0033】
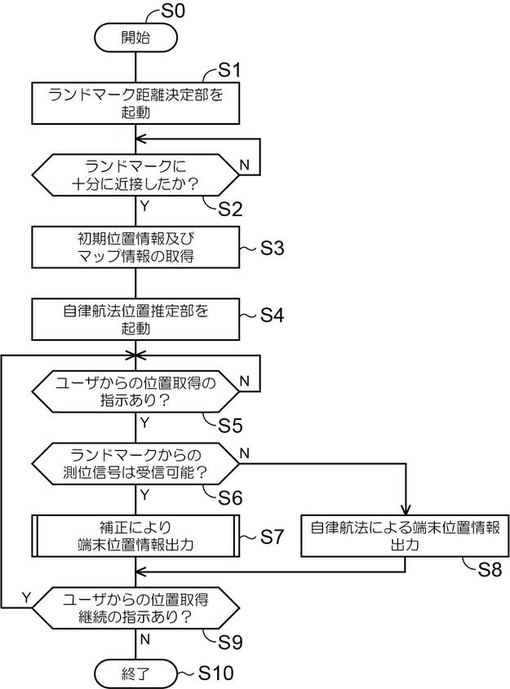
図3にて、フローがステップS0で開始されると、ステップS1ではランドマーク距離決定部3が起動され、いずれかのランドマークLMkからの測位信号の受信が開始される。
【0034】
ステップS2では、いずれかのランドマークLMkからの測位信号が受信できていて、且つランドマーク距離決定部3が決定する端末1とランドマークLMkとの距離rTDOA(t)が十分に小さいか、すなわちランドマークLMkに端末1が十分に近接しているかが判定される。なお、十分に近接しているか否かは、距離rTDOA(t)に所定の閾値を設けることで判定すればよい。
【0035】
ステップS2にて、そもそも測位信号が受信できていない場合を含めて、十分に近接していないと判定されれば、次の時刻ステップにて再度、当該ステップS2が繰り返される。このようにして以降ユーザと共に端末1が移動することで、十分に近接していると判定されるようになるまでステップS2が継続される。
【0036】
ステップS2にて十分に近接していると判定されれば、ステップS3にて初期位置情報としての当該ランドマークLMkの位置情報とマップ情報とを端末1が取得する。なおマップ情報は、インターネット等を経由して図2のマップ情報M1として示したような所定の情報を端末1が取得してマップ情報保持部8に格納され、当該マップ情報上においてランドマークLMkの位置情報が与えられる。この際、当該位置情報は、測位信号に含まれるランドマークLMkのIDの情報等を参照することで、マップ情報上に与えられる。説明のため、当該ランドマークLMkの位置情報を座標で(xk, yk)(ここでランドマーク識別子k=1,2,3、…)とする。
【0037】
次にステップS4にて、自律航法位置推定部6が起動され、ステップS3にて取得された位置情報(xk, yk)を初期値として、自律航法による位置の推定が開始される。説明のため、時刻tにおける当該推定位置(図4のP30の位置)を座標で(xest(t), yest(t))とする。また、ステップS3の直後ただちに(ほぼ同時に)、ステップS4が実行されるものとする。すなわち、当該ステップS3及びS4の実行される時刻を初期時刻t=0とすると、
(xest(0), yest(0))=(xk, yk) …[式1]
である。
【0038】
こうして、初期時刻t=0における端末1の位置すなわちランドマークLMkの位置を基準として、以降の時刻tにおける自律航法による位置の推定値(xest(t), yest(t))が与えられる。また、当該設定より明らかなように、図4で説明したランドマークLMkからの推定距離dest(t)は次のように与えられる。
dest(t)=sqrt{(xest(t)−xk)2+(yest(t)−yk)2} …[式2](ここでsqrt{}は平方根演算を表す)
【0039】
ステップS3及びS4で自律航法位置推定部6が位置推定を開始して以降、不図示のステップでユーザは端末1と共に移動している。ステップS5において、当該ユーザからの端末1の位置取得の指示があるかが判定される。指示がなければ、指示があるまでステップS5が繰り返されることで、端末1は指示を待つ状態となる。
【0040】
位置取得の指示があればステップS6に進み、端末位置補正部7が、当該指示を受けた時点において、ランドマークからの測位信号をランドマーク信号受信部2において受信可能であるかを判定する。なお、当該ランドマークとはステップS2で判定されたのと同一のランドマークLMkである。
【0041】
ステップS6において受信可能と判定されればステップS7へ進み、端末位置補正部7は、当該指示を受けた時点tにおける推定位置(xest(t), yest(t))と当該時点tにおける代表位置設定部4が設定した代表位置とに基づいて補正した位置として、当該時点tにおける端末1の位置を求めてユーザに提示する。詳細については後述する。
【0042】
ステップS6において受信可能ではないと判定されればステップS8へ進み、端末位置補正部7は、当該指示を受けた時点tにおける推定位置(xest(t), yest(t))を端末の位置として決定して、ユーザに提示する。なお、受信可能ではないと判定される場合には、ステップS2で判定されたランドマークLMkとは別のランドマークLMl(k≠l)からの測位信号を受信している場合も含む。
【0043】
なお、ステップS8へ進む場合はランドマークLMk中心の決定円が求められず代表位置が利用できない場合であって、本発明による補正(ステップS7)が適用できないため、推定位置(xest(t), yest(t))のみが利用されている。よって、ステップS8では別実施例として、当該推定位置に代えて、位置取得不能の旨の情報をユーザに提示してもよいし、あるいは当該推定位置の提示に際して、誤差が大きい可能性が高い旨の情報も添えてユーザに提示するようにしてもよい。
【0044】
以上、ステップS6からステップS7またはS8のいずれに進んだ場合も、その後にステップS9に進み、端末1はユーザからの位置取得継続の指示があるかを確認する。当該指示がある場合はステップS5へ戻り、その後さらにユーザと共に移動する端末1において各ステップが繰り返される。当該指示がない場合はステップS10でフローは終了する。なおステップS9では継続指示の確認の代わりに、位置取得の終了指示の有無を確認してもよい。
【0045】
なお、図3のフローにおける補足事項が次の通りである。すなわち、あるランドマークLMkにおいてステップS2で十分に近接したと判定されフローが進められたのち、いずれかのランドマークLMj(j=kの場合も含む)の測位信号における半径rTDOA(t)に対してステップS2と同じの、十分に近接する条件が満たされた瞬間に、不図示のフローによってステップS2にジャンプして戻る。そして、当該ランドマークLMjに対してステップS3以降からフローが継続されるものとする。
【0046】
当該ジャンプ処理により、特に、端末1があるランドマークLMkの周辺から別のランドマークLMjの周辺へと移動した際であっても、推定位置(xest(t), yest(t))が当該別のランドマークLMjを基準とする位置にリセットされ、フローが継続されることとなる。また、同じランドマークLMkに対する推定位置(xest(t), yest(t))も、ランドマークLMkに十分近接した際は、再度初期値にリセットされることで、誤差の累積もリセットされる。
【0047】
また、図3のフローにおけるステップS5(位置取得指示の確認)及びS9(継続指示の確認)は、端末1をユーザが利用する場合の一実施例にすぎない。ステップS5及びS9をスキップして(常に図中Yで示す側へフローを進め)、端末1では端末位置情報を記録又は出力し続けるようにしてもよい。
【0048】
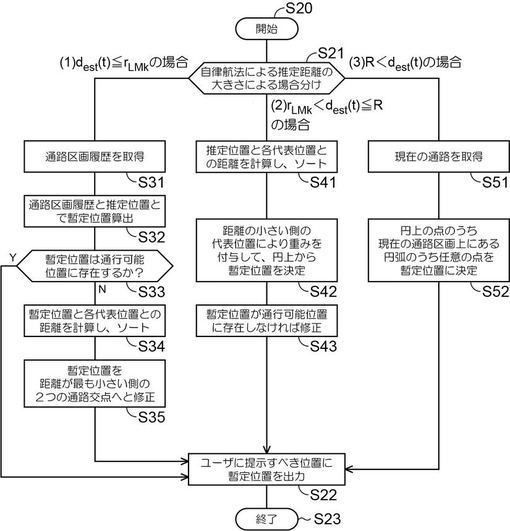
図5は、本発明における特徴的なステップである図3のステップS7、すなわち端末位置補正部7等による補正等の詳細なフローチャートである。ステップS20でフローが開始されると、ステップS21では端末位置補正部7が、自律航法位置推定部6が前述の[式2]で求める推定距離dest(t)の大きさを調べて、当該大きさに応じて以降の処理を切り替えるための場合分け判定を行う。
【0049】
図中にも示す通り、具体的には次の(1)〜(3)へと場合分け判定がなされる。
(1) dest(t)≦rLMk
(2) rLMk<dest(t)≦R
(3) dest(t)>R
ここで、RはランドマークLMkからの測位信号の利用可能半径rLMk(図4の半径R2)よりも大きい所定値であり、R≧2rLMkの条件を満たす所定値に予め設定される。なお、当該閾値としての利用可能半径rLMkの値および閾値のとしてのRの値は、マップ情報等と共に本発明で利用する基本データとして、前述のステップS3等で予め端末1が取得しておくものとする。
【0050】
図5では(1)〜(3)の各々の場合につき後述の暫定位置が算出され、当該暫定位置に適宜修正が加えられたものが、最終的にステップS22においてユーザに端末1の存在位置として提示すべきものとして決定され、ユーザに提示される。特に、(2)及び(3)の場合は、推定距離dest(t)が、当該図5のフローが実行されるに際して端末1の存在し得る範囲(ランドマークLMkの測位信号の利用可能範囲)の外部を示す値となっているので、推定位置に確実に誤差が含まれており、相応の算出処理がなされる。
【0051】
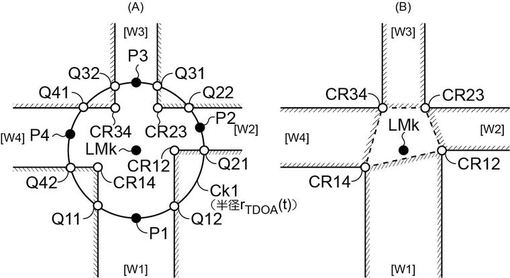
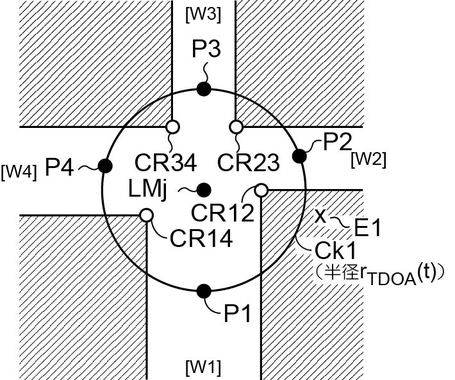
図5を説明するために、まず図6を参照して、代表位置設定部4の設定する代表位置について説明する。図6の(A)は、図4で説明したのと同様に、ランドマークLMk(ここではその位置を点で図示)を中心とし、当該時点tにおいて半径rTDOA(t)となる決定円Ck1及びその周辺のエリアを示している。前述の通り、端末1は当該決定円Ck1上のいずれかの位置に存在すると考えられる。
【0052】
(A)を例として、代表位置設定部4による代表位置P1〜P4の設定を説明する。同図の(B)は(A)と同様のエリアを、そのマップ情報を強調して示したものであり、ランドマークLMkの周囲にはユーザが通行可能な通路が配置され、当該通路はマップ情報において通路区画W1〜W4に分けられている。各通路区画W1〜W4はその境界に斜線を付して図示するように、ランドマークLMk付近に辺として形成される端部を有する矩形状ないし多角形状領域(ただし、ランドマークLMk付近に存在するその一部のみが図示されている)として、マップ情報においてその領域情報が与えられている。
【0053】
また、各通路区画の交点CR12〜CR14もマップ情報に含まれ、例えば交点CR12は通路区画W1とW2との交点として定義され、位置が与えられている。なお、ランドマークLMk周辺の当該4つの交点CR12〜CR14を頂点とする四角形の領域も、通路区画W1〜W4と連結する領域としてユーザが移動可能であるが、内部にランドマークLMkを含むという点で、通路区画とは区別された区画領域として、マップ情報に記載されている。
【0054】
逆に、(A)でその境界に斜線を付してあるW1〜W4等の通路区画及び区画領域以外の領域は、図2で説明した店舗などであって、壁等で遮られているために通路区画W1〜W4等から端末1のユーザが自由に移動してくることができない領域であり、その旨の情報もマップ情報M1に含まれる。
【0055】
(A)に示すように代表位置設定部4は、当該時点tでの決定円Ck1と、当該ランドマークLMk周辺の各通路区画W1〜W4との重なり部分として定義される複数の円弧(ここでは例として4個)の中点をそれぞれ代表位置P1〜P4として求める。当該中点は図示するように、円弧上の長さの中点であり、円弧上においてランドマークLMkからの角度が真ん中となる中点である。
【0056】
すなわち、マップ情報を参照することで、例えば決定円Ck1と通路区画W1との重なり部分である円弧Q11〜Q12が求められ、当該円弧上の中点として通路区画W1に対応する代表位置P1が求められる。同様にそれぞれ、通路区画W2,W3及びW4と決定円Ck1との重なり部分である円弧Q21〜Q22,Q31〜Q32及びQ41〜Q42が求められ、当該円弧上の中点として通路区画W2,W3及びW4に対応する代表位置P2,P3及びP4が求められる。
【0057】
説明のため、時刻tにおいてランドマークLMkの測位信号を受信している際に、決定円Ck1が通路区画Wj(前述の例ではj=1〜4)と重なる部分の円弧の中点として定まる代表位置の座標を、(x[j,k](t), y[j,k](t))とする([定義1])。例えば、図6の代表位置P1の座標は(x[1,k](t), y[1,k](t))となる。
【0058】
図5に戻り、ステップS21にて(1)の場合、ステップS31に進み、初期時刻以降、すなわち図3のステップS3及びS4以降に端末1が移動してきた通路区画履歴を、端末位置補正部7が取得する。通路区画履歴とは、初期時刻から当該現在時刻までの所定の時刻ステップt=t1, t2, t3,…, ti, ti+1,…,tN(tNは当該現在時刻)の各々における推定位置(xest(ti), yest(ti)) { i=1,2,3,…,N }が、例えば図6の通路区画W1〜W4のうちのいずれに該当するか、すなわちいずれの通路区画に存在していたかを履歴として表現したものである。
【0059】
ここで、マップ情報を参照することにより、
推定位置(xest(ti), yest(ti)) ∈通路区画Wj (図6の例であればj=1〜4のいずれか)…[式3]
であれば、時刻ステップtiにおいて通路Wjに端末1が存在したものとして通路区画履歴が構成される。
【0060】
また、いずれの通路区画についても[式3]が成立しない場合がありうる。例えば、精度等の問題で推定位置が通路区画以外の本来移動不可能な位置となってしまった場合等である。このような場合、同様にマップ情報を参照することにより、推定位置に最も近い通路区画に存在したものとして通路区画履歴を構成する。すなわち、推定位置(xest(ti), yest(ti))と各通路区画Wjとの距離Ljを求め、当該距離Ljを最小とするような通路区画Wjに端末1が存在したものとみなして、通路区画履歴を構成する。
【0061】
ここで、当該距離Ljは推定位置(xest(ti), yest(ti))より通路Wjの境界上へと至る線分の最小値として求めればよい。あるいはより好ましい別実施例として、当該距離Ljに、推定位置(xest(ti), yest(ti))と当該時刻ステップtiでの通路区画Wj上における代表位置(x[j,k](ti), y[j,k](ti))との距離などを用いてもよい。
【0062】
すなわち、原則として、各時刻ステップtiにおいて、端末1の推定位置(xest(ti), yest(ti))が属する通路区画を、または属する通路がない場合は当該推定位置が最も近い通路区画を、端末が存在していた通路区画Wj(ti)として、通路区画履歴{Wj(ti)|i=1,2,3,…,N}が得られる。なお、ここでは通路区画を特定するインデックスjが各時刻ステップtiに依存するので、Wj(ti)においてj(ti)と表記している。
【0063】
なお、ランドマークLMk自体を含む所定区画領域(通路区画とは区別される)内に推定位置が存在する場合も、上記距離Ljによる判定を行って、その周囲の通路区画Wjのいずれかのうちの最も近いものに端末1が存在するものとして、通路履歴を構成する。例えば図6のようにランドマークLMkが含まれる所定区画領域(交点CR12〜CR14を頂点とする四角形)内に推定位置があればその周囲の通路区画W1〜W4のうち最も近いものが通路履歴に選ばれる。
【0064】
以上のような通路履歴を構成する処理の例外処理として、次の処理がある。すなわち、決定円Ck1が小さく、対応するランドマークLMkの直近の周囲の通路区画の中に1個でも決定円Ck1と重ならない通路区画がある場合は、当該時刻ステップtiにおいては履歴を定義せず、通路区画履歴より当該時刻ステップtiの項を消去する。ここで、直近の周囲の通路区画とは、ランドマークLMkが属する所定区画領域に連結される通路区画である。図6の例であれば、四角形CR14〜CR14の所定区画に連結する通路区画W1〜W4が、ランドマークLMjの周囲の直近の通路区画である。
【0065】
例えば、時刻ステップ{t1, t2, t3, t4, t5}でそれぞれ該当通路区画が{W1, W1, (決定円Ck1が小さい), W4, W4}となった場合、時刻ステップt3の部分を消去して、時刻ステップ{t1, t2, t4, t5}で定義された通路区画履歴{W1, W1, W4, W4}を採用する。
【0066】
次にステップS32にて端末位置補正部7は、求めた通路区画履歴{Wj(ti)|i=1,2,3,…,N}と当該現在時刻tNでの推定位置とを用いて、当該現在時刻tNにおける端末の暫定位置(xout, yout)を次のように求める。
【0067】
【数1】

【0068】
【数2】
【0069】
[式4]および[式5]において、kは当該時点での測位信号を受信しているランドマークLMkの識別子であり、x[j(ti), k](tN)等については[定義1]の通りの、当該現在時刻tNにおける決定円と、履歴上に現れる各通路区画Wj(ti)とに対して定まる代表位置である。
【0070】
当該[式4]および[式5]による暫定位置はすなわち、当該現在時刻tNにおける決定円上のN個の代表位置(重複して数える場合を含む)と、当該現在時刻tNにおける推定位置(1個)との合計(N+1)個の位置の平均位置である。そして特に、代表位置を用いるのに際して、通路区画の履歴Wj(ti)[i=1,2,…,N]に現れる回数をそのまま重みとして付与して、平均位置を求めている。なお、当該重みの付与の手法は、[式4]および[式5]における手法に限定されず、履歴に現れた回数やその順位等に応じたその他所与の重み付与を採用してもよい。
【0071】
図7は、上記の[式4]及び[式5]の計算例を説明する図であり、ここではランドマークLMkの周囲に通路区画W1〜W4が与えられ、N=3であって時刻ステップは{t1, t2, t3}からなる。図7には各時刻ステップにおける半径rTDOA(ti)の決定円及び矢印で示す推定位置の軌跡が、例(A)及び(B)として示されている。現在時刻がt3である。例(A)は各時刻ステップ{t1, t2, t3}の通路履歴が{W1,W1,W1}の例である。
【0072】
よって(A)では、例えば式[4]は次のようになる。
xout={xest(t3)+3x[1,k](t3)}/4
すなわち、3回現れたW1の代表位置が3回加算され、1個の推定位置と3個の代表位置との計4個の平均位置(x座標)が求められる。また例(B)は、各時刻ステップ{t1, t2, t3}の通路履歴が{W1,W4,W4}の例である。よって(B)では、例えば式[4]は次のようになる。
xout={xest(t3)+x[1,k](t3)+2x[4,k](t3)}/4
すなわち、1回現れたW1の代表位置が1回加算され、2回現れたW4の代表位置が2回加算され、同じく、1個の推定位置と3個の代表位置との計4個の平均位置(x座標)が求められる。
【0073】
図5に戻り、ステップS33では、ステップS32で求めた暫定位置(xout, yout)が、マップ情報上において通行可能な位置、すなわち通路区画又はランドマーク直近の所定区画領域のいずれかの箇所に存在しているか否かを、端末位置補正部7が確認する。当該暫定位置が通行可能な位置に存在していれば、ステップS22へ進んで端末位置補正部7は、当該暫定位置を最終的にユーザに提示すべき位置とする。
【0074】
当該暫定位置が通行可能な位置に存在していなければ、修正を加えるべくステップS34及びステップS35へ進む。ステップS34にて端末位置補正部7は、当該暫定位置(xout, yout)と、当該現在時刻tNにおける各代表位置との距離を計算して、その距離の大きさの順にソートする。ステップS35にて端末位置補正部7はさらに、当該ソートされた距離が小さい側の上位2つの通路区画Wi(距離が最小の通路)及び通路区画Wj(距離が最小から2番目の通路)を選び、当該上位2つの通路区画の交点(xcross,ij ycross,ij)の値により、前記暫定位置(xout, yout)の値を上書きして修正する。そして、当該修正された暫定位置がステップS22においてユーザに提示すべき位置として決定される。
【0075】
図8は、当該ステップS34及びS35の処理を、図6のエリアを例に説明する例である。図8では図6に描かれていない点として、修正すべき対象となった暫定位置(xout, yout)が点E1として×で示されている。斜線付与により図示する通り、点E1は端末1が存在し得ない位置にある。
【0076】
一般に点Xと点Yとの距離をdist(X,Y)と表記することにする([定義2])と、図8の例ではステップS34において、各代表位置P1〜P4との距離が計算され、以下のようにソートされる。
dist(E1,P2)<dist(E1,P1)<dist(E1,P3)<dist(E1,P4)
【0077】
上記ソート結果より、上位2つの通路は1位の代表位置P2に対応する通路区画W2及び2位の代表位置P1に対応する通路区画W1である。よって、ステップS35において通路区画W2及びW1の交点である点CR12が、暫定位置を修正すべき位置として決定される。すなわち、暫定位置(xout, yout)は点E1から点CR12へと修正される。
【0078】
以上の説明よりも明らかなように、図5における場合(1)は推定距離dest(t)自体が小さく、実際の位置に関しても同様に、端末1はランドマークLMkの近辺にあっていずれかの通路区画W1〜W4に少し入っている、あるいは端末1がいずれかの通路区画W1〜W4に少し入ってからまた別の通路区画へと入っているような場合等に該当し、本発明により妥当な位置が得られる。またステップS33の判定により、仮に移動不可能な場所が暫定位置として求まってしまったとしても、妥当な位置として直近の2つの通路区画の交点へと、暫定位置を修正することができる。
【0079】
すなわち、場合(1)は場合(2)及び(3)と比較すると推定距離dest(t)自体が小さいため、推定位置(xest(t), yest(t))の誤差も小さいと考えられる。本発明においてはその誤差を、マップ情報のために端末1の移動可能な箇所に制限が課せられることが反映された通路区画履歴を用いて、ある程度低減ないし調整させることで、妥当な位置を得る。
【0080】
なお、後述する場合(2)及び(3)は、推定距離dest(t)が端末1の実際の位置から算出され得る範囲を超えてしまっている場合であり、場合(1)よりも誤差の累積の影響が大きくなっている。よって場合(2)及び(3)では、通路区画履歴で定まる妥当な通路区画の情報をより重視することで、妥当な位置を得る。
【0081】
なおまた、上記場合(1)の考察より明らかなように、通路区画履歴{Wj(ti)|i=1,2,3,…,N}は当該暫定位置(xout, yout)を求める時刻tNの直近の所定数のみを用いて、[式4]及び[式5]を適用するようにしてもよい。当該適用と同様の効果は、履歴において現在時刻tNに近い側ほどその代表位置に大きな重みを付与することによっても得られる。
【0082】
例えば、図7のような例においてN=6であって時刻ステップ{t1, t2, t3, t4, t5, t6}に対して通路区画履歴が{W1,W1,W1,W1,W4,W4}であるような場合、端末1はW1からW4へと移ってきており、当該時刻t6における実際の位置はW4上である可能性が高い。よって、直近の3つの時刻ステップ{ t4, t5, t6}のみに限定した通路区画履歴{W1,W4,W4}で暫定位置(xout, yout)を求めるようにしてもよい。
【0083】
なお具体的には、[式4]及び[式5]において右辺の和をi=1〜Nで求める代わりに、i=M〜N(1<M<N)で求めて、右辺の分母(N+1)を(N−M+2)へと変更することで、直近の時刻ステップ{tM, tM+1, …, tN}における通路区画履歴で暫定位置を求めることができる。
【0084】
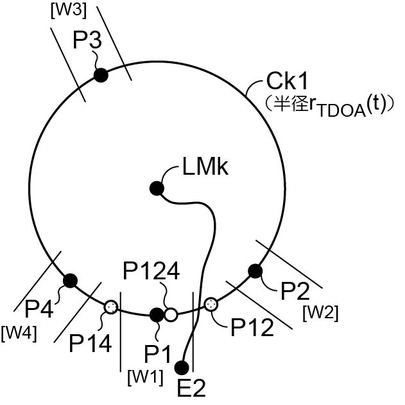
図5のステップS21の説明に戻り、ステップS21にて(2)の場合判定がなされると、ステップS41へ進み、端末位置補正部7は当該現在時刻tにおける推定位置(xest(t), yest(t))と、当該現在時刻tにおける各代表位置との距離を計算して、各距離をソートする。
【0085】
ステップS42にて端末位置補正部7は、ステップS41でソートされた距離が小さい側の代表位置により大きな重みを付与して、当該現在時刻tにおける半径rTDOA(t)の決定円上から所定の位置を選んで、暫定位置となす。すなわち当該暫定位置は、決定円上の点であって、ソートした距離の小さい方の代表位置により近くなるような所定の方式で定められた位置となる。
【0086】
図9を用いてステップS41及びS42の実施例を説明する。図9では、ランドマークLMkを中心とし当該時刻tの半径rTDOA(t)の決定円Ck1上に、通路区画W1〜W4(その一部のみを描く)上の円弧の中点として代表位置P1〜P4が与えられている。点E2は推定位置(xest(t), yest(t))の点である。ここで、前記の[定義2]の記号を用いると、ステップS41におけるソート結果は次の通りである。
dist(E2,P1)<dist(E2,P2)<dist(E2,P4)<dist(E2,P3)
【0087】
ステップS42の一実施例ではまず、当該距離を最小とする代表位置P1及び当該距離が2番目に小さい代表位置P2を両端となす円弧(P1〜P2)において、円弧上の中点P12が求められる。また、当該距離を最小とする代表位置P1及び当該距離が3番目に小さい代表位置P4を両端となす円弧(P1〜P4)において、円弧上の中点P14が求められる。そして、暫定位置として、当該中点P12及びP14を両端となす円弧(P12〜P14)の円弧上の中点P124が設定される。
【0088】
すなわち、決定円上での点Pの所定位置からの角度をθ(P)と表記すると、P124は、角度が{2θ(P1)+θ(P2)+θ(P4)}/4となる点である。当該実施例の他にも、ソートした距離に応じて所定の重みづけを付与して暫定位置を求めることができる。
【0089】
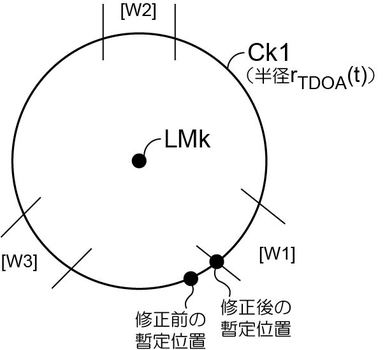
ステップS43にて端末位置補正部7は、ステップS42で設定された暫定位置が通行可能位置に存在するかをマップ情報M1より確認し、存在していればステップS22へ進み当該暫定位置がそのままユーザに提示すべき位置として設定される。存在していなければ当該ステップS43にて端末位置補正部7は暫定位置に修正を加え、修正された暫定位置がステップS22におけるユーザ提示位置とされる。
【0090】
当該ステップS43における修正は、ステップS34及びS35と同様の手法を利用してもよいし、図10に示すように、ステップS42で得た暫定位置から決定円Ck1の円周上において最も近い通路区画を横切る箇所へと修正してもよい。図10では、通行不可能な位置に存在した修正前の暫定位置が、最も近い通路区画W1を横切る箇所へと修正されている。
【0091】
以上のように場合(2)においては、端末1の実際の位置は場合(1)の想定と概ね同様又であるが、推定位置の誤差が場合(1)よりも大きいため、決定円上の通路区画の情報をより積極的に利用することで妥当な位置を決定する。
【0092】
図5のステップS21の説明に戻り、ステップS21にて(3)の場合判定がなされると、ステップS51へ進み、端末位置補正部7はまず、当該現在時点における端末1の存在する通路区画(Wjとする)を推定して取得する。当該取得は、ステップS31で説明した通路区画履歴を取得する手法と同様にすればよい。ただしこの際、履歴としてではなく当該現在時刻tにおいて該当する通路区画のみを取得すればよい。
【0093】
ステップS52で端末位置補正部7は、当該推定された通路区画Wjと当該時点での決定円との重なり部分の円弧上にある任意の点(xrandom, yrandom)を、暫定位置として決定し、ステップS22にて当該暫定位置がユーザに提示すべき位置として決定される。別実施例では任意の点の代わりに、同円弧上の代表点(x[j,k](t), y[j,k](t))を暫定位置及びユーザに提示する位置としてもよい。
【0094】
このように(3)の場合は(2)の場合よりもさらに誤差が大きいため、(2)の場合よりもさらに通路区画の情報に重点を置いて、妥当な位置を決定する。(3)の場合は、端末1の実際の位置も(1)や(2)で想定される位置よりもさらにランドマークLMkから離れて、いずれかの通路区画Wjにある程度入り込んでいる可能性が高い。推定位置はランドマークLMkからの方向に関する情報はある程度残していると考えられるので、最も妥当な所属通路区画を求めることで妥当な位置とする。
【0095】
なお、(2)及び(3)の場合には、図1に示すように、得られた結果を端末位置補正部7ではなく、代表位置設定部4から出力するようにしてもよい。
【0096】
以上のように、本発明では各ランドマークLMkがその周囲に通路区画の端部を配することで通路区画によって囲まれ、端末1及びユーザが通行可能な領域のコーナー部に予め配置されていることで端末1の位置の取得が可能となる。すなわち、各ランドマークLMkは端末1が移動可能な所定区画領域の内部にあり、該所定区画領域を囲むように通路区画が連結することで、ランドマークLMkの周辺に端末1が移動可能な領域とそうでない領域とが形成されることで、決定円上から代表位置の設定が可能となり、本発明が適用可能となる。
【0097】
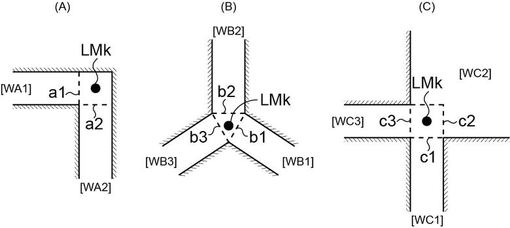
当該配置の一例は図6にて示した。その他の例を図11の(A)〜(C)に示す。ここでは、通行可能でない領域の境界部に斜線を付している。(A)では通路区画WA1及びWA2がランドマークLMkの周囲に端部a1及びa2を配して配置されている。(B)では通路区画WB1〜WB3がランドマークLMkの周辺に端部b1〜b3を配して配置されている。(C)では通路区画WC1〜WC3がランドマークLMkの周辺に端部c1〜c3を配して配置されている(c3は逆L字型の端部となっている)。
【0098】
図11の例に示すように、通路区画のランドマークLMkの周辺への配置は任意個数及び任意角度をもって配置してよい。また、通路区画の形状は典型的には矩形ないし多角形であるが、決定円上において代表位置が定義できれば、曲線状などを含む任意の形状であってよい。また、当該形状は、現実の通路等と店舗等との境界に概ね一致していればよい。
【符号の説明】
【0099】
1…端末、2…ランドマーク信号受信部、3…ランドマーク距離決定部、4…代表位置設定部、5…センサ部、6…自律航法位置推定部、7…端末位置補正部
【技術分野】
【0001】
本発明は、ランドマークからの測位信号、自律航法及びマップ情報を組み合わせて利用した、自身の位置を取得するナビゲーション端末及びその位置の取得方法に関する。
【背景技術】
【0002】
GPS(全地球測位システム;Global Positioning System)を用いた携帯端末での位置情報サービスの広がりに伴い、屋内でも利用可能な位置取得方式のニーズが高まっている。GPS信号が受信できない屋内等において現在位置を測定するのに適した方法の1つとして、非特許文献1〜3等に開示されたTDOA (到来時間差;Time Difference of Arrival)システム等が知られている。
【0003】
TDOAシステムにおいては、適当な間隔にて設置された複数のランドマーク装置が、周期的に距離測定のための信号、すなわち、音波信号と無線信号とを含む測位信号を送信する。この際、各ランドマーク装置は、ほぼ同時に測位信号を送信する様に制御されており、測位信号には、当該無線信号を送信したランドマーク装置の設置位置についての情報が含まれている。
【0004】
端末が、あるランドマーク装置からの無線信号を時刻t1に、このランドマーク装置から音波信号を時刻t2に受信したものとすると、端末と当該ランドマーク装置との距離は、音速×(t2−t1)で計算することができる。ランドマーク装置からの無線信号には、当該ランドマークの位置情報が含まれているため、端末は3つ以上のランドマーク装置との距離を測定することで、自身の現在位置を計算することができる。
【0005】
また、屋内利用可能な現在位置測定手法の1つとして、非特許文献4〜6等に開示された自律航法(慣性航法)がある。自律航法によれば、TDOAシステムにおけるランドマークのような環境側の設備を必要とせず、自律的に位置を推定することが可能である。自律航法は、ジャイロスコープや加速度センサ等を搭載した端末を用い、基準点からの移動方向と相対的な移動距離を累積的に求める方法である。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】Shinichi Minamimoto, Sae Fuji, Hirozumi Yamguchi and Teruo HIgashino, "Local Map Generation using Position and Communication History of Mobile node", IEEE percom 2010, p2-10, 2010.
【非特許文献2】S.Venkatesh, and R.M. Buehrer, "NLOS Mitigation Using Linear Programming in Ultrawideband Location-aware Networks," IEEE Trans. On vehicular technology, Vol.56, No.5, Sep.2007.
【非特許文献3】Lui, K.W.K., So, H.C., and Ma, W.-K. "Maximum A Posteriori Approach to Time-of-Arrival-Based Localization in Non-Line-of-Sight Environment," Vehicular Technology, IEEE Transactions on Vol.59, Issue.3, pp. 1517 - 1523, 2010.
【非特許文献4】Daisuke KAMISAKA, Shigeki MURAMATSU, Takeshi IWAMOTO and Hiroyuki YOKOYAMA, "Design and Implementation of Pedestrian Dead Reckoning System on a Mobile Phone", IEICE Transactions on Information and Systems, Vol.E94. No. 6, pp1137-1146, 2011.
【非特許文献5】U. Steinhoff and B.Schiele, "Dead reckoning from the pocket- An experimental study," In Proceedings of PerCom 2010.
【非特許文献6】Georg GARTNER & Andrew FRANK & Gunther RETSCHER, "Pedestrian Navigation System in Mixed Indoor/Outdoor Environment"
【発明の概要】
【発明が解決しようとする課題】
【0007】
TDOAシステムにおいて、位置検出装置を携帯して移動しながら位置を測定する場合、ランドマーク数は通常5個以上必要となり、当該5個以上のランドマークを用いて現在位置の推定を行い、推定値により補正した測定値を出力することが行われている。よって、特に大規模な屋内環境をカバーしようとすると、コスト面での導入障壁が大きいという課題がある。すなわち、当該大規模環境内の全ての位置で常に5個以上のランドマークから測位信号を受信できるようにランドマークを配置する必要があり、多数のランドマークが必要となるため、コストが高くなってしまう。
【0008】
また、自律航法には、屋内に長時間滞在している場合の精度の確保が困難になるという課題がある。すなわち、自律航法は角速度と加速度の積分を利用するため、航空機、船舶または自動車などのナビゲーションには適しているが、複雑な動作を伴う人間の歩行の場合は特に、累積されてくる誤差の大きさが無視できない。そのため、人間の歩行に適用するためには、端末保持の手法に厳しい制約を課すと共に、歩行によって発生したセンサデータの特徴を捉えて精度を高める必要があるが、それでも依然として誤差の累積は避けられない。
【0009】
本発明の目的は、上記の従来技術の課題を解決し、屋内でも利用可能であって設備導入コストが低く、かつ、所定の精度を確保して妥当な位置を取得することができる、ナビゲーション端末及びその端末の位置の取得方法を提供することにある。
【課題を解決するための手段】
【0010】
上記従来技術の課題を解決するため、本発明は、自身の位置を取得するナビゲーション端末であって、所定位置に配置されたランドマークからの測位信号を受信して該ランドマークと前記ナビゲーション端末との距離を決定するランドマーク距離決定部と、前記ランドマークの位置情報と、前記ランドマークの周辺における、前記ナビゲーション端末が移動可能な通路区画の情報を含んだマップ情報とを保持するマップ情報保持部と、センサ部と、前記センサ部からの出力に自律航法を適用して前記ナビゲーション端末の推定位置を求める自律航法位置推定部と、前記マップ情報を参照して、前記ランドマークを中心として前記決定された距離に等しい半径の円と前記通路区画との重なり部分として得られる円弧の各々から、前記ナビゲーション端末の代表位置を設定する代表位置設定部と、前記推定位置及び前記代表位置の各々並びに当該推定位置と代表位置の各々との距離に基づいて前記ナビゲーション端末の位置を取得する端末位置補正部とを備えることを特徴とする。
【0011】
また、上記従来技術の課題を解決するため、本発明は、端末の位置の取得方法であって、所定位置に配置されたランドマークが送信する測位信号を受信して、該ランドマークと前記端末との距離を決定するステップと、前記ランドマークの位置情報と、前記ランドマークの周辺における、前記端末が移動可能な通路区画の情報とを含んだマップ情報を取得するステップと、前記端末が備えるセンサからの出力に自律航法を適用して、前記端末の推定位置を求めるステップと、前記マップ情報を参照して、前記ランドマークを中心として前記決定された距離に等しい半径の円と前記通路区画との重なり部分として得られる円弧の各々から、前記端末の代表位置を設定するステップと、前記推定位置及び前記代表位置の各々並びに当該推定位置と代表位置の各々との距離に基づいて前記端末の位置を取得するステップとを備えることを特徴とする。
【発明の効果】
【0012】
本発明によれば、測位信号から定まる、端末が高精度でその上に位置していると判断されるランドマークを中心とする円と、マップ情報より定まる、端末が移動可能である領域としての通路区分との重なり部分より、端末が存在する候補位置としての代表位置を複数求め、精度が問題となる自律航法による端末の推定位置を当該複数の代表位置と照らし合わせることで端末の位置を取得する。
【0013】
よって、精度が問題となる自律航法の推定位置が、代表位置によって補正され、妥当な端末の位置を取得することができる。当該補正の際に、推定位置と代表位置との距離を考慮して、例えば当該距離が小さい方の代表位置により重みを付与することなどができる。かつ、当該取得に際しては、1つのランドマークの測位信号を用いて、当該ランドマークとの距離が利用できればよい。よって、端末が一度に複数のランドマークからの測位信号を利用する必要はないため、ランドマーク数が低減される。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態に係るナビゲーション端末の機能ブロック図である。
【図2】本発明の実施形態に係るナビゲーションシステムの概要構成を説明するための図である。
【図3】本発明の実施形態に係る端末の位置取得方法のフローチャートである。
【図4】端末の各機能ブロックが取得するデータを説明するための図である。
【図5】本発明の実施形態に係る位置補正などのフローチャートである。
【図6】位置設定部の設定する代表位置を説明するための図である。
【図7】図5のフローにおける場合(1)における暫定位置の計算例を示すための図である。
【図8】図5のフローにおける場合(1)における暫定位置に修正を加える例を説明するための図である。
【図9】図5のフローにおける場合(2)における暫定位置の決定の一実施例を説明するための図である。
【図10】図5のフローにおける場合(2)における暫定位置に修正を加える例を説明するための図である。
【図11】本発明におけるランドマークとその周囲の通路区画との配置の例を示すための図である。
【発明を実施するための形態】
【0015】
図1は、本発明の実施例に係る、自身の位置を取得するナビゲーション端末の機能ブロック図である。ナビゲーション端末1(端末1と略称する)はランドマーク信号受信部2、ランドマーク距離決定部3、代表位置設定部4、センサ部5、自律航法位置推定部6、端末位置補正部7及びマップ情報保持部8を備える。
【0016】
ランドマーク信号受信部2は、所定の参照位置に固定して配置されたランドマークLMk(k=1,2,3、…)のうち、いずれかからの測位信号(電波信号及び音波信号)を受信する。ランドマーク距離決定部3は、当該受信した測位信号より信号を送信したランドマークのID等を識別すると共に、TDOAの手法に従って受信信号を解析し、音波が到達するのに要した時間を求めて音速に乗算することで、端末1と当該ランドマークLMkとの距離を算出する。
【0017】
代表位置設定部4は、マップ情報保持部8にて保持されているマップ情報を利用することで、ランドマークLMkからの距離がランドマーク距離決定部3により決定された距離を満たす円上より、端末1の存在しうる候補位置としての、複数の代表位置を設定する。当該処理については後述する。
【0018】
センサ部5は各種の自律航法用のセンサ、例えば各々3軸の加速度センサ、地磁気センサ及びジャイロセンサなどを含む。自律航法位置推定部6は、センサ部5の出力に自律航法を適用して端末1の位置を推定すると共に、後述の推定距離を求める。当該推定は後述の所定タイミングにて開始され、当該開始時における位置を基準位置として端末1が移動した位置が、センサ出力に対する積算処理により推定される。
【0019】
端末位置補正部7は後述するように、代表位置設定部4が設定した代表位置と自律航法位置推定部6が推定した位置との両者を用いて補正を行うことで、最終結果としての端末1の位置情報を求め、必要に応じてマップ情報と共に、例えばマップ上で位置情報を表示するなどして、ユーザに提示する。当該補正は例えば、推定位置と代表位置との距離に基づいて、より近い側の代表位置に重みを付与することにより行われる。
【0020】
ユーザへの提示の際、端末1における不図示の入力部より予めユーザからの目的地の入力を受け付けておき、当該求められた端末1の位置情報を現在位置として、周知の経路案内技術を適用し、目的地までの経路と共にユーザに提示してもよい。マップ情報保持部8は、必要に応じて参照可能なようにマップ情報を保持する。
【0021】
図2は、本発明の実施例に係る端末1の位置のナビゲーションシステムの構成を概要的に説明する図である。ナビゲーションシステムS1においては、各ランドマークLMk(ここでは例としてk=1,2,…,8)及び矩形の斜線領域で表記している複数の店舗等が、GPSの利用できない又は利用困難な屋内等の対象エリアに配置されている。当該所定の配置等の情報は、マップ情報保持部8で保持されるマップ情報M1に記載されている。当該配置構成された対象エリア内において、軌跡T1(端末1の実際の位置の軌跡)を描いて移動する端末1の妥当な位置が本発明により取得される。
【0022】
マップ情報M1には、各ランドマークLMkの位置情報と、ユーザ及び端末1が移動可能な領域としての通路等の情報と、壁などの存在によって当該通路等から直接ユーザ及び端末1が移動することができない領域としての店舗等の情報とが含まれる。すなわち、対象エリアにおける各領域の形状及び位置情報や、各領域のユーザ及び端末1の通行・移動可否の情報がマップ情報M1に含まれる。
【0023】
各ランドマークLMkには、送信したTDOAの測位信号を端末1において受信可能な所定の範囲Ci(ここではLMkにおけるk=1,2,…,8にそれぞれ対応する例としてi=10,20,…,80)が存在する。本発明においては信号の反射や干渉は考慮しないものとし、各範囲Ciは、各ランドマークLMk及び端末1の信号送受信性能によって定まる所定半径の円形領域である。
【0024】
ナビゲーションシステムS1は、上記の各範囲Ci同士が互いに重複することがないように構成され、当該構成はマップ情報M1に記録されている。すなわち、ナビゲーションシステムS1において端末1は、その位置に応じて測位信号を受信可能又は不可能であって、受信可能な場合は、常にランドマークLMkのうちの1個からのみ受信することとなり、2個以上から受信することはない。
【0025】
このように本発明では、従来技術におけるTDOAシステムで原理上少なくとも3つの、また、精度を考慮すれば5つのランドマークからの測位信号を端末において受信する必要があるのに比べて、測位信号は1つのみ利用できればよい。よって本発明では、同じ面積のエリアにナビゲーションシステムS1を構築する際のランドマークLMkの数が従来技術よりも低減され、コスト低減の効果がある。
【0026】
図3に、本発明の実施形態に係るナビゲーションシステムS1における、端末1の位置の取得方法のフローチャートを示す。図3を説明するためにまず、図4を用いて端末1を構成する各機能ブロックが取得するデータについて説明する。
【0027】
図4においては、あるランドマークLMkが図内中央に配置されている。図示するrTDOA(t)は、ランドマーク距離決定部3により決定されるLMkと端末1との距離であり、各時刻tにつき決定され、端末1の移動に応じてその値は適宜変化する。
【0028】
円Ck1は、ランドマークLMkの位置を中心とし、その半径R1の長さがrTDOA(t)となる円である。ここで本発明の前提として、次の事項がある。ランドマーク距離決定部3の決定する距離の精度は、誤差の累積が起こらないために、自律航法位置推定部5が推定する位置の精度より高い。そして端末1は、ランドマーク距離決定部3が距離を決定して定める当該円Ck1上のいずれかの点に、十分な精度で位置している。本発明の説明において特に、当該円Ck1を「決定円」と呼ぶこととする。
【0029】
代表位置設定部4は、当該端末1が位置していると判断される決定円Ck1の円周上から、マップ情報を利用して後述のように所定の代表位置を設定する。図4では代表位置の例として、決定円Ck1上の4点P1,P2,P3及びP4が示されている。なお、当該代表位置P1乃至P4は、半径の値rTDOA(t)と共に決定円Ck1が時刻tの経過に伴う端末1の移動に応じて大きさを変えるのに従って、決定円Ck1上に位置しながら移動することとなる。また代表位置はその個数を含めて、マップ情報より定まる。
【0030】
円Ck10はランドマークLMkの位置を中心とし、その半径R2の長さが図示するrLMkとなる円である。ここで長さrLMkはランドマークLMkからの測位信号を端末1が受信可能な最大長である。すなわち、円Ck10は図2においてランドマークLM1〜LM8に対して示した円C10〜C80と同様である。よって、円Ck10の外部に存在する場合、端末1はランドマークLM1からの距離rTDOA(t)を決定することができない。
【0031】
軌跡T3は、自律航法位置推定部6が推定する端末1の位置の軌跡である。また、当該時刻tにおける移動軌跡上の位置すなわち推定位置がP30である。距離dest(t)は、推定位置P30とランドマークLMkの位置とをつなぐ線分R3の長さに等しく、自律航法位置推定部6は当該距離を推定距離dest(t)として求める。
【0032】
自律航法位置推定部6の精度がランドマーク距離決定部3と同程度に十分に高ければ、推定位置P30は実際の端末1の位置を十分な精度で表すこととなり、従って、決定円Ck1上に存在することとなる。しかし、自律航法の精度には限度があるため、一般に推定位置P30は決定円Ck1上には存在せず、(a)に示すように決定円Ck1内部にある場合(R3<R1となる)も、(b)に示すように決定円Ck1外部で且つ円Ck10内部にある場合(R1<R3<R2;図4ではこの場合が描かれている)も、また(c)に示すように円Ck10外部にある場合(R3>R2となる)もありうる。なお、(c)の場合はもはや決定円Ck1は求められない。本発明においては、推定位置P30と、決定円Ck1上の代表位置(当該例においてはP1乃至P4)とを用いて、図3のフローに従って端末1の位置として妥当性の高い位置を決定する。
【0033】
図3にて、フローがステップS0で開始されると、ステップS1ではランドマーク距離決定部3が起動され、いずれかのランドマークLMkからの測位信号の受信が開始される。
【0034】
ステップS2では、いずれかのランドマークLMkからの測位信号が受信できていて、且つランドマーク距離決定部3が決定する端末1とランドマークLMkとの距離rTDOA(t)が十分に小さいか、すなわちランドマークLMkに端末1が十分に近接しているかが判定される。なお、十分に近接しているか否かは、距離rTDOA(t)に所定の閾値を設けることで判定すればよい。
【0035】
ステップS2にて、そもそも測位信号が受信できていない場合を含めて、十分に近接していないと判定されれば、次の時刻ステップにて再度、当該ステップS2が繰り返される。このようにして以降ユーザと共に端末1が移動することで、十分に近接していると判定されるようになるまでステップS2が継続される。
【0036】
ステップS2にて十分に近接していると判定されれば、ステップS3にて初期位置情報としての当該ランドマークLMkの位置情報とマップ情報とを端末1が取得する。なおマップ情報は、インターネット等を経由して図2のマップ情報M1として示したような所定の情報を端末1が取得してマップ情報保持部8に格納され、当該マップ情報上においてランドマークLMkの位置情報が与えられる。この際、当該位置情報は、測位信号に含まれるランドマークLMkのIDの情報等を参照することで、マップ情報上に与えられる。説明のため、当該ランドマークLMkの位置情報を座標で(xk, yk)(ここでランドマーク識別子k=1,2,3、…)とする。
【0037】
次にステップS4にて、自律航法位置推定部6が起動され、ステップS3にて取得された位置情報(xk, yk)を初期値として、自律航法による位置の推定が開始される。説明のため、時刻tにおける当該推定位置(図4のP30の位置)を座標で(xest(t), yest(t))とする。また、ステップS3の直後ただちに(ほぼ同時に)、ステップS4が実行されるものとする。すなわち、当該ステップS3及びS4の実行される時刻を初期時刻t=0とすると、
(xest(0), yest(0))=(xk, yk) …[式1]
である。
【0038】
こうして、初期時刻t=0における端末1の位置すなわちランドマークLMkの位置を基準として、以降の時刻tにおける自律航法による位置の推定値(xest(t), yest(t))が与えられる。また、当該設定より明らかなように、図4で説明したランドマークLMkからの推定距離dest(t)は次のように与えられる。
dest(t)=sqrt{(xest(t)−xk)2+(yest(t)−yk)2} …[式2](ここでsqrt{}は平方根演算を表す)
【0039】
ステップS3及びS4で自律航法位置推定部6が位置推定を開始して以降、不図示のステップでユーザは端末1と共に移動している。ステップS5において、当該ユーザからの端末1の位置取得の指示があるかが判定される。指示がなければ、指示があるまでステップS5が繰り返されることで、端末1は指示を待つ状態となる。
【0040】
位置取得の指示があればステップS6に進み、端末位置補正部7が、当該指示を受けた時点において、ランドマークからの測位信号をランドマーク信号受信部2において受信可能であるかを判定する。なお、当該ランドマークとはステップS2で判定されたのと同一のランドマークLMkである。
【0041】
ステップS6において受信可能と判定されればステップS7へ進み、端末位置補正部7は、当該指示を受けた時点tにおける推定位置(xest(t), yest(t))と当該時点tにおける代表位置設定部4が設定した代表位置とに基づいて補正した位置として、当該時点tにおける端末1の位置を求めてユーザに提示する。詳細については後述する。
【0042】
ステップS6において受信可能ではないと判定されればステップS8へ進み、端末位置補正部7は、当該指示を受けた時点tにおける推定位置(xest(t), yest(t))を端末の位置として決定して、ユーザに提示する。なお、受信可能ではないと判定される場合には、ステップS2で判定されたランドマークLMkとは別のランドマークLMl(k≠l)からの測位信号を受信している場合も含む。
【0043】
なお、ステップS8へ進む場合はランドマークLMk中心の決定円が求められず代表位置が利用できない場合であって、本発明による補正(ステップS7)が適用できないため、推定位置(xest(t), yest(t))のみが利用されている。よって、ステップS8では別実施例として、当該推定位置に代えて、位置取得不能の旨の情報をユーザに提示してもよいし、あるいは当該推定位置の提示に際して、誤差が大きい可能性が高い旨の情報も添えてユーザに提示するようにしてもよい。
【0044】
以上、ステップS6からステップS7またはS8のいずれに進んだ場合も、その後にステップS9に進み、端末1はユーザからの位置取得継続の指示があるかを確認する。当該指示がある場合はステップS5へ戻り、その後さらにユーザと共に移動する端末1において各ステップが繰り返される。当該指示がない場合はステップS10でフローは終了する。なおステップS9では継続指示の確認の代わりに、位置取得の終了指示の有無を確認してもよい。
【0045】
なお、図3のフローにおける補足事項が次の通りである。すなわち、あるランドマークLMkにおいてステップS2で十分に近接したと判定されフローが進められたのち、いずれかのランドマークLMj(j=kの場合も含む)の測位信号における半径rTDOA(t)に対してステップS2と同じの、十分に近接する条件が満たされた瞬間に、不図示のフローによってステップS2にジャンプして戻る。そして、当該ランドマークLMjに対してステップS3以降からフローが継続されるものとする。
【0046】
当該ジャンプ処理により、特に、端末1があるランドマークLMkの周辺から別のランドマークLMjの周辺へと移動した際であっても、推定位置(xest(t), yest(t))が当該別のランドマークLMjを基準とする位置にリセットされ、フローが継続されることとなる。また、同じランドマークLMkに対する推定位置(xest(t), yest(t))も、ランドマークLMkに十分近接した際は、再度初期値にリセットされることで、誤差の累積もリセットされる。
【0047】
また、図3のフローにおけるステップS5(位置取得指示の確認)及びS9(継続指示の確認)は、端末1をユーザが利用する場合の一実施例にすぎない。ステップS5及びS9をスキップして(常に図中Yで示す側へフローを進め)、端末1では端末位置情報を記録又は出力し続けるようにしてもよい。
【0048】
図5は、本発明における特徴的なステップである図3のステップS7、すなわち端末位置補正部7等による補正等の詳細なフローチャートである。ステップS20でフローが開始されると、ステップS21では端末位置補正部7が、自律航法位置推定部6が前述の[式2]で求める推定距離dest(t)の大きさを調べて、当該大きさに応じて以降の処理を切り替えるための場合分け判定を行う。
【0049】
図中にも示す通り、具体的には次の(1)〜(3)へと場合分け判定がなされる。
(1) dest(t)≦rLMk
(2) rLMk<dest(t)≦R
(3) dest(t)>R
ここで、RはランドマークLMkからの測位信号の利用可能半径rLMk(図4の半径R2)よりも大きい所定値であり、R≧2rLMkの条件を満たす所定値に予め設定される。なお、当該閾値としての利用可能半径rLMkの値および閾値のとしてのRの値は、マップ情報等と共に本発明で利用する基本データとして、前述のステップS3等で予め端末1が取得しておくものとする。
【0050】
図5では(1)〜(3)の各々の場合につき後述の暫定位置が算出され、当該暫定位置に適宜修正が加えられたものが、最終的にステップS22においてユーザに端末1の存在位置として提示すべきものとして決定され、ユーザに提示される。特に、(2)及び(3)の場合は、推定距離dest(t)が、当該図5のフローが実行されるに際して端末1の存在し得る範囲(ランドマークLMkの測位信号の利用可能範囲)の外部を示す値となっているので、推定位置に確実に誤差が含まれており、相応の算出処理がなされる。
【0051】
図5を説明するために、まず図6を参照して、代表位置設定部4の設定する代表位置について説明する。図6の(A)は、図4で説明したのと同様に、ランドマークLMk(ここではその位置を点で図示)を中心とし、当該時点tにおいて半径rTDOA(t)となる決定円Ck1及びその周辺のエリアを示している。前述の通り、端末1は当該決定円Ck1上のいずれかの位置に存在すると考えられる。
【0052】
(A)を例として、代表位置設定部4による代表位置P1〜P4の設定を説明する。同図の(B)は(A)と同様のエリアを、そのマップ情報を強調して示したものであり、ランドマークLMkの周囲にはユーザが通行可能な通路が配置され、当該通路はマップ情報において通路区画W1〜W4に分けられている。各通路区画W1〜W4はその境界に斜線を付して図示するように、ランドマークLMk付近に辺として形成される端部を有する矩形状ないし多角形状領域(ただし、ランドマークLMk付近に存在するその一部のみが図示されている)として、マップ情報においてその領域情報が与えられている。
【0053】
また、各通路区画の交点CR12〜CR14もマップ情報に含まれ、例えば交点CR12は通路区画W1とW2との交点として定義され、位置が与えられている。なお、ランドマークLMk周辺の当該4つの交点CR12〜CR14を頂点とする四角形の領域も、通路区画W1〜W4と連結する領域としてユーザが移動可能であるが、内部にランドマークLMkを含むという点で、通路区画とは区別された区画領域として、マップ情報に記載されている。
【0054】
逆に、(A)でその境界に斜線を付してあるW1〜W4等の通路区画及び区画領域以外の領域は、図2で説明した店舗などであって、壁等で遮られているために通路区画W1〜W4等から端末1のユーザが自由に移動してくることができない領域であり、その旨の情報もマップ情報M1に含まれる。
【0055】
(A)に示すように代表位置設定部4は、当該時点tでの決定円Ck1と、当該ランドマークLMk周辺の各通路区画W1〜W4との重なり部分として定義される複数の円弧(ここでは例として4個)の中点をそれぞれ代表位置P1〜P4として求める。当該中点は図示するように、円弧上の長さの中点であり、円弧上においてランドマークLMkからの角度が真ん中となる中点である。
【0056】
すなわち、マップ情報を参照することで、例えば決定円Ck1と通路区画W1との重なり部分である円弧Q11〜Q12が求められ、当該円弧上の中点として通路区画W1に対応する代表位置P1が求められる。同様にそれぞれ、通路区画W2,W3及びW4と決定円Ck1との重なり部分である円弧Q21〜Q22,Q31〜Q32及びQ41〜Q42が求められ、当該円弧上の中点として通路区画W2,W3及びW4に対応する代表位置P2,P3及びP4が求められる。
【0057】
説明のため、時刻tにおいてランドマークLMkの測位信号を受信している際に、決定円Ck1が通路区画Wj(前述の例ではj=1〜4)と重なる部分の円弧の中点として定まる代表位置の座標を、(x[j,k](t), y[j,k](t))とする([定義1])。例えば、図6の代表位置P1の座標は(x[1,k](t), y[1,k](t))となる。
【0058】
図5に戻り、ステップS21にて(1)の場合、ステップS31に進み、初期時刻以降、すなわち図3のステップS3及びS4以降に端末1が移動してきた通路区画履歴を、端末位置補正部7が取得する。通路区画履歴とは、初期時刻から当該現在時刻までの所定の時刻ステップt=t1, t2, t3,…, ti, ti+1,…,tN(tNは当該現在時刻)の各々における推定位置(xest(ti), yest(ti)) { i=1,2,3,…,N }が、例えば図6の通路区画W1〜W4のうちのいずれに該当するか、すなわちいずれの通路区画に存在していたかを履歴として表現したものである。
【0059】
ここで、マップ情報を参照することにより、
推定位置(xest(ti), yest(ti)) ∈通路区画Wj (図6の例であればj=1〜4のいずれか)…[式3]
であれば、時刻ステップtiにおいて通路Wjに端末1が存在したものとして通路区画履歴が構成される。
【0060】
また、いずれの通路区画についても[式3]が成立しない場合がありうる。例えば、精度等の問題で推定位置が通路区画以外の本来移動不可能な位置となってしまった場合等である。このような場合、同様にマップ情報を参照することにより、推定位置に最も近い通路区画に存在したものとして通路区画履歴を構成する。すなわち、推定位置(xest(ti), yest(ti))と各通路区画Wjとの距離Ljを求め、当該距離Ljを最小とするような通路区画Wjに端末1が存在したものとみなして、通路区画履歴を構成する。
【0061】
ここで、当該距離Ljは推定位置(xest(ti), yest(ti))より通路Wjの境界上へと至る線分の最小値として求めればよい。あるいはより好ましい別実施例として、当該距離Ljに、推定位置(xest(ti), yest(ti))と当該時刻ステップtiでの通路区画Wj上における代表位置(x[j,k](ti), y[j,k](ti))との距離などを用いてもよい。
【0062】
すなわち、原則として、各時刻ステップtiにおいて、端末1の推定位置(xest(ti), yest(ti))が属する通路区画を、または属する通路がない場合は当該推定位置が最も近い通路区画を、端末が存在していた通路区画Wj(ti)として、通路区画履歴{Wj(ti)|i=1,2,3,…,N}が得られる。なお、ここでは通路区画を特定するインデックスjが各時刻ステップtiに依存するので、Wj(ti)においてj(ti)と表記している。
【0063】
なお、ランドマークLMk自体を含む所定区画領域(通路区画とは区別される)内に推定位置が存在する場合も、上記距離Ljによる判定を行って、その周囲の通路区画Wjのいずれかのうちの最も近いものに端末1が存在するものとして、通路履歴を構成する。例えば図6のようにランドマークLMkが含まれる所定区画領域(交点CR12〜CR14を頂点とする四角形)内に推定位置があればその周囲の通路区画W1〜W4のうち最も近いものが通路履歴に選ばれる。
【0064】
以上のような通路履歴を構成する処理の例外処理として、次の処理がある。すなわち、決定円Ck1が小さく、対応するランドマークLMkの直近の周囲の通路区画の中に1個でも決定円Ck1と重ならない通路区画がある場合は、当該時刻ステップtiにおいては履歴を定義せず、通路区画履歴より当該時刻ステップtiの項を消去する。ここで、直近の周囲の通路区画とは、ランドマークLMkが属する所定区画領域に連結される通路区画である。図6の例であれば、四角形CR14〜CR14の所定区画に連結する通路区画W1〜W4が、ランドマークLMjの周囲の直近の通路区画である。
【0065】
例えば、時刻ステップ{t1, t2, t3, t4, t5}でそれぞれ該当通路区画が{W1, W1, (決定円Ck1が小さい), W4, W4}となった場合、時刻ステップt3の部分を消去して、時刻ステップ{t1, t2, t4, t5}で定義された通路区画履歴{W1, W1, W4, W4}を採用する。
【0066】
次にステップS32にて端末位置補正部7は、求めた通路区画履歴{Wj(ti)|i=1,2,3,…,N}と当該現在時刻tNでの推定位置とを用いて、当該現在時刻tNにおける端末の暫定位置(xout, yout)を次のように求める。
【0067】
【数1】
【0068】
【数2】
【0069】
[式4]および[式5]において、kは当該時点での測位信号を受信しているランドマークLMkの識別子であり、x[j(ti), k](tN)等については[定義1]の通りの、当該現在時刻tNにおける決定円と、履歴上に現れる各通路区画Wj(ti)とに対して定まる代表位置である。
【0070】
当該[式4]および[式5]による暫定位置はすなわち、当該現在時刻tNにおける決定円上のN個の代表位置(重複して数える場合を含む)と、当該現在時刻tNにおける推定位置(1個)との合計(N+1)個の位置の平均位置である。そして特に、代表位置を用いるのに際して、通路区画の履歴Wj(ti)[i=1,2,…,N]に現れる回数をそのまま重みとして付与して、平均位置を求めている。なお、当該重みの付与の手法は、[式4]および[式5]における手法に限定されず、履歴に現れた回数やその順位等に応じたその他所与の重み付与を採用してもよい。
【0071】
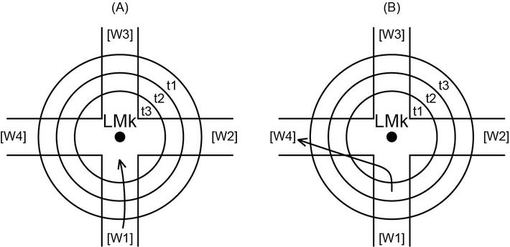
図7は、上記の[式4]及び[式5]の計算例を説明する図であり、ここではランドマークLMkの周囲に通路区画W1〜W4が与えられ、N=3であって時刻ステップは{t1, t2, t3}からなる。図7には各時刻ステップにおける半径rTDOA(ti)の決定円及び矢印で示す推定位置の軌跡が、例(A)及び(B)として示されている。現在時刻がt3である。例(A)は各時刻ステップ{t1, t2, t3}の通路履歴が{W1,W1,W1}の例である。
【0072】
よって(A)では、例えば式[4]は次のようになる。
xout={xest(t3)+3x[1,k](t3)}/4
すなわち、3回現れたW1の代表位置が3回加算され、1個の推定位置と3個の代表位置との計4個の平均位置(x座標)が求められる。また例(B)は、各時刻ステップ{t1, t2, t3}の通路履歴が{W1,W4,W4}の例である。よって(B)では、例えば式[4]は次のようになる。
xout={xest(t3)+x[1,k](t3)+2x[4,k](t3)}/4
すなわち、1回現れたW1の代表位置が1回加算され、2回現れたW4の代表位置が2回加算され、同じく、1個の推定位置と3個の代表位置との計4個の平均位置(x座標)が求められる。
【0073】
図5に戻り、ステップS33では、ステップS32で求めた暫定位置(xout, yout)が、マップ情報上において通行可能な位置、すなわち通路区画又はランドマーク直近の所定区画領域のいずれかの箇所に存在しているか否かを、端末位置補正部7が確認する。当該暫定位置が通行可能な位置に存在していれば、ステップS22へ進んで端末位置補正部7は、当該暫定位置を最終的にユーザに提示すべき位置とする。
【0074】
当該暫定位置が通行可能な位置に存在していなければ、修正を加えるべくステップS34及びステップS35へ進む。ステップS34にて端末位置補正部7は、当該暫定位置(xout, yout)と、当該現在時刻tNにおける各代表位置との距離を計算して、その距離の大きさの順にソートする。ステップS35にて端末位置補正部7はさらに、当該ソートされた距離が小さい側の上位2つの通路区画Wi(距離が最小の通路)及び通路区画Wj(距離が最小から2番目の通路)を選び、当該上位2つの通路区画の交点(xcross,ij ycross,ij)の値により、前記暫定位置(xout, yout)の値を上書きして修正する。そして、当該修正された暫定位置がステップS22においてユーザに提示すべき位置として決定される。
【0075】
図8は、当該ステップS34及びS35の処理を、図6のエリアを例に説明する例である。図8では図6に描かれていない点として、修正すべき対象となった暫定位置(xout, yout)が点E1として×で示されている。斜線付与により図示する通り、点E1は端末1が存在し得ない位置にある。
【0076】
一般に点Xと点Yとの距離をdist(X,Y)と表記することにする([定義2])と、図8の例ではステップS34において、各代表位置P1〜P4との距離が計算され、以下のようにソートされる。
dist(E1,P2)<dist(E1,P1)<dist(E1,P3)<dist(E1,P4)
【0077】
上記ソート結果より、上位2つの通路は1位の代表位置P2に対応する通路区画W2及び2位の代表位置P1に対応する通路区画W1である。よって、ステップS35において通路区画W2及びW1の交点である点CR12が、暫定位置を修正すべき位置として決定される。すなわち、暫定位置(xout, yout)は点E1から点CR12へと修正される。
【0078】
以上の説明よりも明らかなように、図5における場合(1)は推定距離dest(t)自体が小さく、実際の位置に関しても同様に、端末1はランドマークLMkの近辺にあっていずれかの通路区画W1〜W4に少し入っている、あるいは端末1がいずれかの通路区画W1〜W4に少し入ってからまた別の通路区画へと入っているような場合等に該当し、本発明により妥当な位置が得られる。またステップS33の判定により、仮に移動不可能な場所が暫定位置として求まってしまったとしても、妥当な位置として直近の2つの通路区画の交点へと、暫定位置を修正することができる。
【0079】
すなわち、場合(1)は場合(2)及び(3)と比較すると推定距離dest(t)自体が小さいため、推定位置(xest(t), yest(t))の誤差も小さいと考えられる。本発明においてはその誤差を、マップ情報のために端末1の移動可能な箇所に制限が課せられることが反映された通路区画履歴を用いて、ある程度低減ないし調整させることで、妥当な位置を得る。
【0080】
なお、後述する場合(2)及び(3)は、推定距離dest(t)が端末1の実際の位置から算出され得る範囲を超えてしまっている場合であり、場合(1)よりも誤差の累積の影響が大きくなっている。よって場合(2)及び(3)では、通路区画履歴で定まる妥当な通路区画の情報をより重視することで、妥当な位置を得る。
【0081】
なおまた、上記場合(1)の考察より明らかなように、通路区画履歴{Wj(ti)|i=1,2,3,…,N}は当該暫定位置(xout, yout)を求める時刻tNの直近の所定数のみを用いて、[式4]及び[式5]を適用するようにしてもよい。当該適用と同様の効果は、履歴において現在時刻tNに近い側ほどその代表位置に大きな重みを付与することによっても得られる。
【0082】
例えば、図7のような例においてN=6であって時刻ステップ{t1, t2, t3, t4, t5, t6}に対して通路区画履歴が{W1,W1,W1,W1,W4,W4}であるような場合、端末1はW1からW4へと移ってきており、当該時刻t6における実際の位置はW4上である可能性が高い。よって、直近の3つの時刻ステップ{ t4, t5, t6}のみに限定した通路区画履歴{W1,W4,W4}で暫定位置(xout, yout)を求めるようにしてもよい。
【0083】
なお具体的には、[式4]及び[式5]において右辺の和をi=1〜Nで求める代わりに、i=M〜N(1<M<N)で求めて、右辺の分母(N+1)を(N−M+2)へと変更することで、直近の時刻ステップ{tM, tM+1, …, tN}における通路区画履歴で暫定位置を求めることができる。
【0084】
図5のステップS21の説明に戻り、ステップS21にて(2)の場合判定がなされると、ステップS41へ進み、端末位置補正部7は当該現在時刻tにおける推定位置(xest(t), yest(t))と、当該現在時刻tにおける各代表位置との距離を計算して、各距離をソートする。
【0085】
ステップS42にて端末位置補正部7は、ステップS41でソートされた距離が小さい側の代表位置により大きな重みを付与して、当該現在時刻tにおける半径rTDOA(t)の決定円上から所定の位置を選んで、暫定位置となす。すなわち当該暫定位置は、決定円上の点であって、ソートした距離の小さい方の代表位置により近くなるような所定の方式で定められた位置となる。
【0086】
図9を用いてステップS41及びS42の実施例を説明する。図9では、ランドマークLMkを中心とし当該時刻tの半径rTDOA(t)の決定円Ck1上に、通路区画W1〜W4(その一部のみを描く)上の円弧の中点として代表位置P1〜P4が与えられている。点E2は推定位置(xest(t), yest(t))の点である。ここで、前記の[定義2]の記号を用いると、ステップS41におけるソート結果は次の通りである。
dist(E2,P1)<dist(E2,P2)<dist(E2,P4)<dist(E2,P3)
【0087】
ステップS42の一実施例ではまず、当該距離を最小とする代表位置P1及び当該距離が2番目に小さい代表位置P2を両端となす円弧(P1〜P2)において、円弧上の中点P12が求められる。また、当該距離を最小とする代表位置P1及び当該距離が3番目に小さい代表位置P4を両端となす円弧(P1〜P4)において、円弧上の中点P14が求められる。そして、暫定位置として、当該中点P12及びP14を両端となす円弧(P12〜P14)の円弧上の中点P124が設定される。
【0088】
すなわち、決定円上での点Pの所定位置からの角度をθ(P)と表記すると、P124は、角度が{2θ(P1)+θ(P2)+θ(P4)}/4となる点である。当該実施例の他にも、ソートした距離に応じて所定の重みづけを付与して暫定位置を求めることができる。
【0089】
ステップS43にて端末位置補正部7は、ステップS42で設定された暫定位置が通行可能位置に存在するかをマップ情報M1より確認し、存在していればステップS22へ進み当該暫定位置がそのままユーザに提示すべき位置として設定される。存在していなければ当該ステップS43にて端末位置補正部7は暫定位置に修正を加え、修正された暫定位置がステップS22におけるユーザ提示位置とされる。
【0090】
当該ステップS43における修正は、ステップS34及びS35と同様の手法を利用してもよいし、図10に示すように、ステップS42で得た暫定位置から決定円Ck1の円周上において最も近い通路区画を横切る箇所へと修正してもよい。図10では、通行不可能な位置に存在した修正前の暫定位置が、最も近い通路区画W1を横切る箇所へと修正されている。
【0091】
以上のように場合(2)においては、端末1の実際の位置は場合(1)の想定と概ね同様又であるが、推定位置の誤差が場合(1)よりも大きいため、決定円上の通路区画の情報をより積極的に利用することで妥当な位置を決定する。
【0092】
図5のステップS21の説明に戻り、ステップS21にて(3)の場合判定がなされると、ステップS51へ進み、端末位置補正部7はまず、当該現在時点における端末1の存在する通路区画(Wjとする)を推定して取得する。当該取得は、ステップS31で説明した通路区画履歴を取得する手法と同様にすればよい。ただしこの際、履歴としてではなく当該現在時刻tにおいて該当する通路区画のみを取得すればよい。
【0093】
ステップS52で端末位置補正部7は、当該推定された通路区画Wjと当該時点での決定円との重なり部分の円弧上にある任意の点(xrandom, yrandom)を、暫定位置として決定し、ステップS22にて当該暫定位置がユーザに提示すべき位置として決定される。別実施例では任意の点の代わりに、同円弧上の代表点(x[j,k](t), y[j,k](t))を暫定位置及びユーザに提示する位置としてもよい。
【0094】
このように(3)の場合は(2)の場合よりもさらに誤差が大きいため、(2)の場合よりもさらに通路区画の情報に重点を置いて、妥当な位置を決定する。(3)の場合は、端末1の実際の位置も(1)や(2)で想定される位置よりもさらにランドマークLMkから離れて、いずれかの通路区画Wjにある程度入り込んでいる可能性が高い。推定位置はランドマークLMkからの方向に関する情報はある程度残していると考えられるので、最も妥当な所属通路区画を求めることで妥当な位置とする。
【0095】
なお、(2)及び(3)の場合には、図1に示すように、得られた結果を端末位置補正部7ではなく、代表位置設定部4から出力するようにしてもよい。
【0096】
以上のように、本発明では各ランドマークLMkがその周囲に通路区画の端部を配することで通路区画によって囲まれ、端末1及びユーザが通行可能な領域のコーナー部に予め配置されていることで端末1の位置の取得が可能となる。すなわち、各ランドマークLMkは端末1が移動可能な所定区画領域の内部にあり、該所定区画領域を囲むように通路区画が連結することで、ランドマークLMkの周辺に端末1が移動可能な領域とそうでない領域とが形成されることで、決定円上から代表位置の設定が可能となり、本発明が適用可能となる。
【0097】
当該配置の一例は図6にて示した。その他の例を図11の(A)〜(C)に示す。ここでは、通行可能でない領域の境界部に斜線を付している。(A)では通路区画WA1及びWA2がランドマークLMkの周囲に端部a1及びa2を配して配置されている。(B)では通路区画WB1〜WB3がランドマークLMkの周辺に端部b1〜b3を配して配置されている。(C)では通路区画WC1〜WC3がランドマークLMkの周辺に端部c1〜c3を配して配置されている(c3は逆L字型の端部となっている)。
【0098】
図11の例に示すように、通路区画のランドマークLMkの周辺への配置は任意個数及び任意角度をもって配置してよい。また、通路区画の形状は典型的には矩形ないし多角形であるが、決定円上において代表位置が定義できれば、曲線状などを含む任意の形状であってよい。また、当該形状は、現実の通路等と店舗等との境界に概ね一致していればよい。
【符号の説明】
【0099】
1…端末、2…ランドマーク信号受信部、3…ランドマーク距離決定部、4…代表位置設定部、5…センサ部、6…自律航法位置推定部、7…端末位置補正部
【特許請求の範囲】
【請求項1】
自身の位置を取得するナビゲーション端末であって、
所定位置に配置されたランドマークからの測位信号を受信して該ランドマークと前記ナビゲーション端末との距離を決定するランドマーク距離決定部と、
前記ランドマークの位置情報と、前記ランドマークの周辺における、前記ナビゲーション端末が移動可能な通路区画の情報とを含んだマップ情報を保持するマップ情報保持部と、
センサ部と、
前記センサ部からの出力に自律航法を適用して前記ナビゲーション端末の推定位置を求める自律航法位置推定部と、
前記マップ情報を参照して、前記ランドマークを中心として前記決定された距離に等しい半径の円と前記通路区画との重なり部分として得られる円弧の各々から、前記ナビゲーション端末の代表位置を設定する代表位置設定部と、
前記推定位置及び前記代表位置の各々並びに当該推定位置と代表位置の各々との距離に基づいて前記ナビゲーション端末の位置を取得する端末位置補正部とを備えることを特徴とするナビゲーション端末。
【請求項2】
前記自律航法位置推定部は、前記測位信号より決定される距離が所定条件を満たして小さくなった時点において、前記マップ情報より得られる前記ランドマークの位置を初期位置に設定して、前記自律航法の適用を開始することを特徴とする請求項1に記載のナビゲーション端末。
【請求項3】
前記端末位置補正部は、前記推定位置の履歴と前記マップ情報における各通路区画の場所の情報とにより、前記ナビゲーション端末が位置したと推定される通路区画の履歴を取得し、
前記ナビゲーション端末の位置を取得するに際して、当該取得する時点における前記代表位置のうち、前記通路区画の履歴に現れた通路区画に対応する代表位置と、当該取得する時点における前記推定位置との平均位置を前記ナビゲーション端末の位置として取得し、
当該平均位置を求めるに際して、当該代表位置の各々に対して当該通路区画の履歴に現れた回数に応じた所与の重みを付与することを特徴とする請求項1または2のいずれかに記載のナビゲーション端末。
【請求項4】
前記端末位置補正部は、前記推定位置の前記ランドマークからの距離が小さい側の第一の閾値内に収まる場合に、前記平均位置を前記ナビゲーション端末の位置として取得し、収まらない場合には、当該取得する時点における前記推定位置と前記代表位置の各々との距離を算出し、前記円の円周上より、当該算出された距離がより小さい代表位置により近くなるような所与の重み付けによって、前記ナビゲーション端末の位置を取得することを特徴とする請求項3に記載のナビゲーション端末。
【請求項5】
前記端末位置補正部は、前記推定位置の前記ランドマークからの距離が前記第一の閾値よりも大きい第二の閾値内に収まる場合に前記重み付けによって前記ナビゲーション端末の位置を取得し、収まらない場合には、当該取得する時点における前記推定位置と前記代表位置の各々との距離を算出し、前記円と、当該算出された距離が最小となる代表位置に対応する通路区画との重なり部分として得られる円弧上の位置からランダムに選出した位置を、前記ナビゲーション端末の位置として取得することを特徴とする請求項4に記載のナビゲーション端末。
【請求項6】
前記端末位置補正部は、当該取得する時点において前記ランドマークからの測位信号が受信できない場合には、前記推定位置及び前記代表位置の各々並びに当該推定位置と代表位置の各々との距離に基づいて前記ナビゲーション端末の位置を取得するのに代えて、当該取得する時点における前記推定位置を前記ナビゲーション端末の位置として取得することを特徴とする請求項1ないし5のいずれかに記載のナビゲーション端末。
【請求項7】
端末の位置の取得方法であって、
所定位置に配置されたランドマークが送信する測位信号を受信して、該ランドマークと前記端末との距離を決定するステップと、
前記ランドマークの位置情報と、前記ランドマークの周辺における、前記端末が移動可能な通路区画の情報とを含んだマップ情報を取得するステップと、
前記端末が備えるセンサからの出力に自律航法を適用して、前記端末の推定位置を求めるステップと、
前記マップ情報を参照して、前記ランドマークを中心として前記決定された距離に等しい半径の円と前記通路区画との重なり部分として得られる円弧の各々から、前記端末の代表位置を設定するステップと、
前記推定位置及び前記代表位置の各々並びに当該推定位置と代表位置の各々との距離に基づいて前記端末の位置を取得するステップとを備えることを特徴とする端末の位置の取得方法。
【請求項8】
前記ランドマークの各々が、前記端末が2つ以上のランドマークから同時に測位信号を受信することがないように、各々離れて所定位置に配置されることを特徴とする請求項7に記載の端末の位置の取得方法。
【請求項9】
前記ランドマークは前記端末が移動可能な所定区画領域の内部に配置され、該所定区画領域に通路区画が連結することで、前記ランドマークの周辺に前記端末が移動可能な領域と移動可能ではない領域とが形成されていることを特徴とする請求項7または8に記載の端末の位置の取得方法。
【請求項1】
自身の位置を取得するナビゲーション端末であって、
所定位置に配置されたランドマークからの測位信号を受信して該ランドマークと前記ナビゲーション端末との距離を決定するランドマーク距離決定部と、
前記ランドマークの位置情報と、前記ランドマークの周辺における、前記ナビゲーション端末が移動可能な通路区画の情報とを含んだマップ情報を保持するマップ情報保持部と、
センサ部と、
前記センサ部からの出力に自律航法を適用して前記ナビゲーション端末の推定位置を求める自律航法位置推定部と、
前記マップ情報を参照して、前記ランドマークを中心として前記決定された距離に等しい半径の円と前記通路区画との重なり部分として得られる円弧の各々から、前記ナビゲーション端末の代表位置を設定する代表位置設定部と、
前記推定位置及び前記代表位置の各々並びに当該推定位置と代表位置の各々との距離に基づいて前記ナビゲーション端末の位置を取得する端末位置補正部とを備えることを特徴とするナビゲーション端末。
【請求項2】
前記自律航法位置推定部は、前記測位信号より決定される距離が所定条件を満たして小さくなった時点において、前記マップ情報より得られる前記ランドマークの位置を初期位置に設定して、前記自律航法の適用を開始することを特徴とする請求項1に記載のナビゲーション端末。
【請求項3】
前記端末位置補正部は、前記推定位置の履歴と前記マップ情報における各通路区画の場所の情報とにより、前記ナビゲーション端末が位置したと推定される通路区画の履歴を取得し、
前記ナビゲーション端末の位置を取得するに際して、当該取得する時点における前記代表位置のうち、前記通路区画の履歴に現れた通路区画に対応する代表位置と、当該取得する時点における前記推定位置との平均位置を前記ナビゲーション端末の位置として取得し、
当該平均位置を求めるに際して、当該代表位置の各々に対して当該通路区画の履歴に現れた回数に応じた所与の重みを付与することを特徴とする請求項1または2のいずれかに記載のナビゲーション端末。
【請求項4】
前記端末位置補正部は、前記推定位置の前記ランドマークからの距離が小さい側の第一の閾値内に収まる場合に、前記平均位置を前記ナビゲーション端末の位置として取得し、収まらない場合には、当該取得する時点における前記推定位置と前記代表位置の各々との距離を算出し、前記円の円周上より、当該算出された距離がより小さい代表位置により近くなるような所与の重み付けによって、前記ナビゲーション端末の位置を取得することを特徴とする請求項3に記載のナビゲーション端末。
【請求項5】
前記端末位置補正部は、前記推定位置の前記ランドマークからの距離が前記第一の閾値よりも大きい第二の閾値内に収まる場合に前記重み付けによって前記ナビゲーション端末の位置を取得し、収まらない場合には、当該取得する時点における前記推定位置と前記代表位置の各々との距離を算出し、前記円と、当該算出された距離が最小となる代表位置に対応する通路区画との重なり部分として得られる円弧上の位置からランダムに選出した位置を、前記ナビゲーション端末の位置として取得することを特徴とする請求項4に記載のナビゲーション端末。
【請求項6】
前記端末位置補正部は、当該取得する時点において前記ランドマークからの測位信号が受信できない場合には、前記推定位置及び前記代表位置の各々並びに当該推定位置と代表位置の各々との距離に基づいて前記ナビゲーション端末の位置を取得するのに代えて、当該取得する時点における前記推定位置を前記ナビゲーション端末の位置として取得することを特徴とする請求項1ないし5のいずれかに記載のナビゲーション端末。
【請求項7】
端末の位置の取得方法であって、
所定位置に配置されたランドマークが送信する測位信号を受信して、該ランドマークと前記端末との距離を決定するステップと、
前記ランドマークの位置情報と、前記ランドマークの周辺における、前記端末が移動可能な通路区画の情報とを含んだマップ情報を取得するステップと、
前記端末が備えるセンサからの出力に自律航法を適用して、前記端末の推定位置を求めるステップと、
前記マップ情報を参照して、前記ランドマークを中心として前記決定された距離に等しい半径の円と前記通路区画との重なり部分として得られる円弧の各々から、前記端末の代表位置を設定するステップと、
前記推定位置及び前記代表位置の各々並びに当該推定位置と代表位置の各々との距離に基づいて前記端末の位置を取得するステップとを備えることを特徴とする端末の位置の取得方法。
【請求項8】
前記ランドマークの各々が、前記端末が2つ以上のランドマークから同時に測位信号を受信することがないように、各々離れて所定位置に配置されることを特徴とする請求項7に記載の端末の位置の取得方法。
【請求項9】
前記ランドマークは前記端末が移動可能な所定区画領域の内部に配置され、該所定区画領域に通路区画が連結することで、前記ランドマークの周辺に前記端末が移動可能な領域と移動可能ではない領域とが形成されていることを特徴とする請求項7または8に記載の端末の位置の取得方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−88348(P2013−88348A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−230771(P2011−230771)
【出願日】平成23年10月20日(2011.10.20)
【出願人】(000208891)KDDI株式会社 (2,700)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月20日(2011.10.20)
【出願人】(000208891)KDDI株式会社 (2,700)
【Fターム(参考)】
[ Back to top ]