
ナビゲーション衛星システムのチャネル間バイアス較正
【課題】ナビゲーション受信器のチャネル間バイアスを較正する装置および方法を提供すること。
【解決手段】ナビゲーション受信器のチャネル間バイアスを較正する装置であって、基準信号を生成する基準信号回路と、遅延基準信号を該基準信号と比較することによって、該ナビゲーション受信機のフロントエンド回路に関連するバイアス遅延を測定する測定ロジックであって、該遅延基準信号は、該フロントエンド回路を通る該基準信号の伝搬に基づいており、該フロントエンド回路は、該基準信号と受信衛星信号とを処理する、測定ロジックと、チャネル間バイアスを低減するために補正信号を生成する較正ロジックとを備えている、装置。
【解決手段】ナビゲーション受信器のチャネル間バイアスを較正する装置であって、基準信号を生成する基準信号回路と、遅延基準信号を該基準信号と比較することによって、該ナビゲーション受信機のフロントエンド回路に関連するバイアス遅延を測定する測定ロジックであって、該遅延基準信号は、該フロントエンド回路を通る該基準信号の伝搬に基づいており、該フロントエンド回路は、該基準信号と受信衛星信号とを処理する、測定ロジックと、チャネル間バイアスを低減するために補正信号を生成する較正ロジックとを備えている、装置。
【発明の詳細な説明】
【技術分野】
【0001】
1.分野
本発明は、ナビゲーション衛星システムのチャネル間バイアスの較正に関する。
【背景技術】
【0002】
2.関連技術
グローバルナビゲーション衛星システムGPSおよびGLONASSの信号を利用するナビゲーション受信器は、種々の位置決定タスクを非常に高い精度で可能にする。GLONASS受信器は、ナビゲーション衛星によって送信された無線信号を受信し、処理する。衛星信号は、キャリア高調波信号であり、擬似ランダムバイナリコードによって変調されており、擬似ランダムバイナリコードは、受信器側では、ローカル基準時計に対する遅延を測定するために使用される。これらの遅延測定は、受信器と衛星との間のいわゆる擬似距離を決定するのに使用される。擬似距離は、受信器のローカル時計が衛星搭載の時計とは異なっているので、真の幾何学的距離とは異なっている。視界にある衛星の数が4つ以上である場合、測定された擬似距離は、処理され、ユーザの単一点位置X=(x,y,z)T(すべてのベクトルは列ベクトルとして表され、記号Tは、行列/ベクトルの転置を表す)を決定し、そして受信器時計のオフセットに対して補償し得る。
【0003】
位置精度の改善に対する必要性は、最終的に「差動ナビゲーション/ポジショニング」の開発を導いた。このモードでは、ユーザの位置は、基地の座標が高い精度で知られていることを仮定して、基地受信器に接続されたアンテナに対して決定される。基地受信器は、その測定値(または、フル測定に対する補正)をモバイルナビゲーション受信器「Rover」に送信する。Rover受信器は、これらの補正を使用して、データ処理において、それ自体の測定値を精緻化する。これらのアプローチに対する合理性は、基地およびRover側の擬似距離および擬似位相測定誤差の大部分が、強力に相関しているので、差動測定を使用することが、実質的に位置決定精度を改善する。
【0004】
GLONASS受信器の基本的なタスクは、いくつかのGLONASS衛星への距離を測定し、受信器の座標を計算することである。衛星への距離は、衛星から、受信された信号が処理される受信器電子回路のコアまでの信号の進行時間を測定することによって、測定される。基地受信器(既知の点)からの使用されるデータは、Roverの共通誤差を除去し、正確な結果をもたらす。各衛星から受信器電子回路への信号経路は、2つの部分からなり、それらは、1)衛星から受信器アンテナへの空間における直接経路と、2)受信器アンテナから受信器電子回路までの部分とから構成される。第1の経路は、各衛星に一意的である。第2の経路は、すべての衛星に共通であり、アンテナ電子回路、アンテナケーブルを通って、受信器のアナログおよびデジタルセクションへ信号が進行する経路である。第2の経路を通る信号の進行時間は、「受信器バイアス」と言われる。受信器バイアスがすべての衛星で同じである限り、受信器バイアスは、受信器時計のオフセットの成分として働き、我々は、第4の未知数(x,y,zとともに)として解く。言い換えれば、受信器バイアスがすべての衛星に同一であるならば、位置計算に影響は与えない。
【0005】
受信器バイアスがすべての衛星に同一であるという仮定は、GPSでは真であるが、GLONASSでは真ではない。理由は、受信器バイアスは、衛星信号周波数に依存するからである。すべてのGPS衛星は、同一周波数で送信しており、それらはすべて同一の受信器バイアスを生成する。しかしながら、GLONASS衛星は、異なる周波数で送信し、各GLONASS衛星は異なる受信器バイアスを発生する。技術的用語では、GLONASS衛星は、チャネル間バイアスを起こし、このチャネル間バイアスを考慮にいれない場合、位置精度を著しく低下し得る。幸いなことに、基地受信器とRover受信器との間のすべての共通誤差は相殺される。それ故、基地受信器およびRover受信器におけるGLONASSチャネル間バイアスの受信器受信器大きさが同一である場合、これらのバイアスは相殺され、これらは位置精度を低下させない。そのようなケースでは、GLONASS衛星はGPS衛星と同じくらい良好に働く。しかしながら、このことはほとんど起こらない。このことは、チャネル間バイアスの大きさが受信器設計およびその電子構成要素のみでなく、温度および電子構成要素におけるわずかの変動にも依存する事実に起因する。基地受信器およびRover受信器が同一の製造者からのものであり全く同一の設計、構成要素構成要素および製造日を有する最良の場合でも、なおも温度およびささいな構成要素構成要素の差の問題がある。GLONASSチャネル間バイアスの大きさが、GLONASS衛星の正確な応用に対する使用を禁止し得る。
【0006】
目的がセンチメートルあるいはサブセンチメートルの精度を達成することである場合、GLONASSチャネル間バイアスを取り扱うのは容易なタスクではない。現在、数社の製造者は、GLONASSチャネル間バイアスを単に無視している。チャネル間バイアスが顕著な場合、1つの解決法は、GPSおよびGLONASSを使用して曖昧さを解決し、その後、GLONASS測定値を無視するか、またはGLONASS測定値に対してかなり弱い重み付けをすることである。いくつかの受信器によっては、基地とRoverとの間のチャネル間バイアスは許容できないものであり、受信器ファームウェアはGLONASS衛星を無視し、GPS衛星のみに基づく解を提供する。この方法の問題の取り扱いは、ユーザがなぜかれらのGPS+GLONASS受信器が、GPSのみの受信器に対してどんな改善も示さないのかを知ることができない。受信器ファームウェアが、高いチャネル間バイアスを有するGLONASS衛星を隔離できない場合、それは不正確な結果を提供する。これは、ユーザに誤った結果を受け入れさせる深刻な問題である。他の製造者は、GLONASSチャネル間バイアスを、プリプロダクション受信器のサンプルで測定し、これらのバイアスファームウェアにハードコードしようと試みている。これは、前向きなステップであるが、まだサンプルに比べて電子構成要素間に差があり、それらの特性が温度および時間によって変化するので、決して、問題を処置できるものではない。
【発明の概要】
【発明が解決しようとする課題】
【0007】
従って、受信器特定のチャネル間バイアスを動的に説明し、較正する解決法が必要とされる。
【課題を解決するための手段】
【0008】
本発明の実施形態は、GLONASSチャネル間バイアスの較正を対象にしている。実施形態は、基準信号を生成し、ナビゲーション受信器のフロントエンド回路に関連したバイアス遅延を、遅延基準信号を基準信号と比較することによって測定する。遅延基準信号は、ナビゲーション受信器のフロントエンド回路を通る、基準信号の伝搬に基づいている。フロントエンド回路は、基準信号および受信された衛星信号を処理する。較正モジュールは、補正信号を生成し、チャネル間バイアスを減少する。別の実施形態では、マイクロプロセッサが補正信号を生成し得る。
【0009】
実施形態は、補正信号を受信された衛星信号にさらに適用し得る。1つの例では、補正信号は、位相補正成分および距離補正成分を含み得る。
【0010】
別の例では、基準信号は、受信された衛星信号と同一の周波数を変調し得る。1つの例では、基準信号は、コード構造の違いによって、受信された衛星信号の疑似ランダムノイズ信号成分から分離可能である。さらに、フロントエンド回路は、受信された衛星信号および基準信号を下方変換するためのダウンコンバータを含み得る。
【0011】
本明細書に記載された多くの技術は、ハードウェア、ファームウェア、ソフトウェアあるいはそれらの組み合わせにおいて実装され得る。1つの例では、技術が、プログラム可能なコンピュータ上で実行するコンピュータプログラムに実装され得、プログラム可能なコンピュータは、それぞれ、プロセッサ、プロセッサによって読み取り可能な格納媒体(揮発性メモリ、不揮発性メモリ、あるいは格納構成要素を含む)および、適切な入力および出力デバイスを含む。プログラムコードが、記述された機能を実行する入力デバイスを用いて入力されたデータに適用され、出力情報を生成する。出力情報は、1つ以上の出力デバイスに適用される。さらに、各プログラムは好ましくは、高レベルの手続またはオブジェクト志向のプログラム言語に実装され得、コンピュータシステムと通信する。しかしながら、プログラムは、必要に応じて、アセンブリ言語あるいは機械言語に実装され得る。どの場合でも、言語はコンパイル言語あるいはインタープレット言語である。
【0012】
本発明は、さらに以下の手段を提供する。
(項目1)
ナビゲーション受信器のチャネル間バイアスを較正する装置であって、
基準信号を生成する基準信号回路と、
遅延基準信号を該基準信号と比較することによって、該ナビゲーション受信機のフロントエンド回路に関連するバイアス遅延を測定する測定ロジックであって、該遅延基準信号は、該フロントエンド回路を通る該基準信号の伝搬に基づいており、該フロントエンド回路は、該基準信号と受信衛星信号とを処理する、測定ロジックと、
チャネル間バイアスを低減するために補正信号を生成する較正ロジックと
を備えている、装置。
(項目2)
上記補正信号は、上記受信衛星信号に適用される、上記項目に記載の装置。
(項目3)
上記補正信号は、位相補正成分と距離補正成分とを含む、上記項目のいずれかに記載の装置。
(項目4)
上記基準信号は、上記受信衛星信号と同じ搬送波周波数を変調する、上記項目のいずれかに記載の装置。
(項目5)
上記基準信号は、異なるコード構造に起因して、上記受信衛星信号の擬似ランダムノイズ信号とは分離可能である、上記項目のいずれかに記載の装置。
(項目6)
上記フロントエンド回路は、上記受信衛星信号および上記基準信号を下方変換するダウンコンバータを含む、上記項目のいずれかに記載の装置。
(項目7)
ナビゲーション受信機のチャネル間バイアスを較正する方法であって、
基準信号を生成することと、
遅延基準信号を該基準信号と比較することによって、該ナビゲーション受信機のフロントエンド回路と関連するバイアス遅延を測定することであって、該遅延基準信号は、該ナビゲーション受信機の該フロントエンド回路を通る該基準信号の伝搬に基づき、該フロントエンド回路は該基準信号と受信衛星信号とに基づく、ことと、
チャネル間バイアスを低減するために補正信号を生成することと
を包含する、方法。
(項目8)
上記補正信号は、上記受信衛星信号に適用される、上記項目に記載の方法。
(項目9)
上記補正信号は、位相補正成分と距離補正成分とを含む、上記項目のいずれかに記載の方法。
(項目10)
上記基準信号は、上記受信衛星信号と同じ搬送波周波数を変調する、上記項目のいずれかに記載の方法。
(項目11)
上記基準信号は、異なるコード構造に起因して、上記受信衛星信号の擬似ランダムノイズ信号とは分離可能である、上記項目のいずれかに記載の方法。
(項目12)
上記フロントエンド回路は、上記受信衛星信号および上記基準信号を下方変換するダウンコンバータを含む、上記項目のいずれかに記載の方法。
(項目13)
ナビゲーション受信器のチャネル間バイアスを較正するプログラムコードを含むコンピュータ読み取り可能格納媒体であって、該プログラムコードは、
基準信号を生成することと、
遅延基準信号を該基準信号と比較することによって、該ナビゲーション受信機のフロントエンド回路と関連するバイアス遅延を測定することであって、該遅延基準信号は、該ナビゲーション受信器の該フロントエンド回路を通る該基準信号の伝搬に基づき、該フロントエンド回路は該基準信号と受信衛星信号とに基づく、ことと、
チャネル間バイアスを低減するために補正信号を生成することと
を行う、コンピュータ読み取り可能格納媒体。
(項目14)
上記補正信号は、上記受信衛星信号に適用される、上記項目に記載のコンピュータ読み取り可能格納媒体。
(項目15)
上記補正信号は、位相補正成分と距離補正成分とを含む、上記項目のいずれかに記載のコンピュータ読み取り可能格納媒体。
(項目16)
上記基準信号は、上記受信衛星信号と同じ搬送波周波数を変調する、上記項目のいずれかに記載のコンピュータ読み取り可能格納媒体。
(項目17)
上記基準信号は、異なるコード構造に起因して、上記受信衛星信号の擬似ランダムノイズ信号とは分離可能である、上記項目のいずれかに記載のコンピュータ読み取り可能格納媒体。
(項目18)
上記フロントエンド回路は、上記受信衛星信号および上記基準信号を下方変換するダウンコンバータを含む、上記項目のいずれかに記載のコンピュータ読み取り可能格納媒体。
(摘要)
ナビゲーション受信機の動的なチャネル間バイアス較正が提供される。基準信号は、受信器のフロントエンド回路を介して伝搬される。フロントエンド回路を介した基準信号の伝搬によって起こされた遅延が、測定され得る。ナビゲーション受信機のチャネル間バイアスは、受信器のフロントエンド回路に関連する測定された遅延を用いて減少される。
【図面の簡単な説明】
【0013】
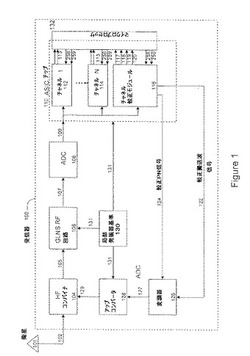
【図1】図1は、例示的チャネル間バイアス較正受信器の模式的ダイアグラムを例示している。
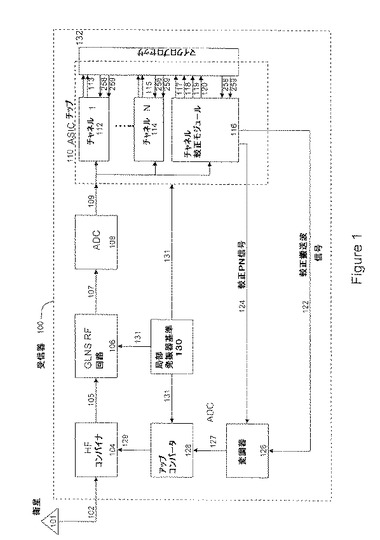
【図2】図2は、例示的較正モジュールの模式的ダイアグラムを例示している。
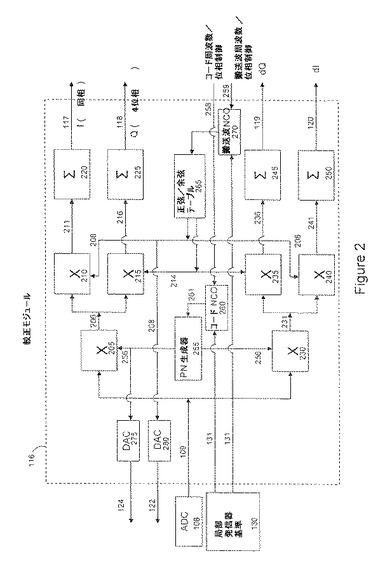
【図3】図3は、例示的GLONASS/GPSチャネルの模式的ダイアグラムを例示している。
【図4】図4は、本発明のある実施形態における、いくつかの処理機能あるいはすべての処理機能を実装するために採用され得る典型的なコンピュータシステムを例示している。
【発明を実施するための形態】
【0014】
以下の記述は、当業者が本発明を製造し使用することを可能にするように提示されており、特定の用途およびそれらの要件に関連して提供される。実施形態への種々の修正が、当業者には容易に明らかであり、本明細書において規定された一般的な原理は、本発明の精神および範囲を外れることなく他の実施形態および用途に適用され得る。さらに、以下の記述では、多くの詳細が、説明の目的で述べられている。しかしながら、当業者は、本発明がこれらの具体的な詳細の使用なしで実施され得ることを理解するであろう。他の例では、本発明の記述が不必要な詳細によって不明確にならないように、周知の構造およびデバイスは、ブロックダイアグラムの形で示されている。従って、本発明は示される実施形態に限定されないが、本明細書に開示された原理および特徴は、一貫しているもっとも広い範囲に従うべきである。
【0015】
本発明は特定の例および例示の図面に関して述べられているが、当業者は、本発明が例または記述された図に限定されないことを認識するであろう。当業者は、種々の実施形態の動作が、ハードウェア、ソフトウェア、ファームウェア、またはそれらの組み合わせを用いて、適切に実装され得ることを認識するであろう。例えば、いくつかのプロセスは、プロセッサまたは他のデジタル回路を用いて、ソフトウェア、ファームウェアあるいはハードワイヤロジックの制御の下で実行され得る。(用語「ロジック」は本明細書では、当業者に認識され得るような、引用された機能を実行する、固定されたハードウェア、プログラム可能なロジックあるいはそれらの適切な組み合わせを意味する)。ソフトウェア、およびファームウェアは、コンピュータ読み取り可能な格納媒体上に格納され得る。当業者に周知のように、いくつかの他のプロセスがアナログ回路を用いて実装され得る。さらに、メモリまたは他の格納が、通信構成要素構成要素と同じく本発明の実施形態に採用され得る。
【0016】
図1は、本明細書に開示された実施形態によるチャネル間バイアス較正受信器の一般的な構成を例示している。1つの例では、チャネル間バイアス較正受信器100は、GLONASS信号102を衛星101から受信する。GLONASS信号102は、2つの疑似ノイズ(「PN」)コード成分、直交搬送波成分上にある粗コードおよび密コードを含み得、較正受信器100によって使用され得、受信器の位置を決定する。例えば、典型的なGLONASS信号102は、2つのPNコード成分によって変調された搬送波信号を含む。搬送波信号の周波数は、衛星特有であり得、従って、各GLONASS衛星は、異なる周波数でGLONASS信号を送信し得る。
【0017】
チャネル間バイアス較正受信器100は、また、高周波コンバイナ104を含む。高周波コンバイナ104は、加算器として働き、2つ以上の信号を組み合わせる。1つの例では、高周波コンバイナ104は、GLONASS信号102を較正信号129と共に受信し、それらを組み合わせて組み合わせ信号105を生成する。
【0018】
チャネル間バイアス較正受信器100は、また、GLONASS RF回路106を含む。1つの例では、GLONASS RF回路106は、入力アナログ組合せ信号105を、アナログ−デジタル変換器によって処理され得る信号に変調し、その後、衛星信号検出回路が受信された衛星信号を検出する。GLONASS RF回路106は、例えば、フィルタ、増幅器、および入力信号をベースバンドに変換するダウンコンバータを含み得る。ダウンコンバータは、代わりに、全体の受信周波数計画設計および利用可能な電子構成要素に依存して、中間周波数に変換し得ることを理解すべきである。当業者は、追加回路がまた、含まれ得、アナログ信号を適切に変調することを認識するであろう。GLONASS RF回路106は、RF回路出力信号107を生成し、RF回路出力信号107は、アナログ−デジタル変換器(「ADC」)108によって、デジタル信号であるADC信号109に変換される。ADC信号109は、RF回路出力信号107の多重繰り返しサンプリングによって生成されたデジタル信号である。デジタル信号のスペクトルは、ベースバンドのアナログ信号のイメージを含み得るが、さらなるデジタル処理は、受信器のアーキテクチャに依存する。例えば、受信器は、複数のデジタルスペクトル画像のうちの1つをベースバンドに変換し得るか、または、ベースバンド画像自体を処理し得る。
【0019】
チャネル間バイアス較正受信器100は、また、チャネル112および114のような複数のGLONASSチャネルを含み得る。任意の数のチャネルが提供され得ることを理解すべきである。GLONASSチャネル112および114は、ADC信号109に含まれるGLONASS PNコードを復調する復調器、PNコード基準生成器、PNコード生成器に加えて搬送波周波数復調器(例えばフェーズロックループ−PLLの位相検出器)も駆動する数値制御発振器(コードNCO)、および、基準搬送波周波数および位相を形成する数値制御発振器(搬送波NCO)をそれぞれ含み得る。1つの例では、チャネル112およびチャネル114の数値制御発振器(コードNCO)は、コード周波数/位相制御信号258を入力として受信し得る。さらに、チャネル112およびチャネル114の数値制御発振器(搬送波NCO)は、搬送波周波数/位相制御信号259を入力として受信し得る。コード周波数/位相制御信号258および搬送波周波数/位相制御信号259が以下に詳細に記述される。
【0020】
1つの例では、GLONASSチャネルは、特定用途向け集積回路(「ASIC」)チップ110上に常駐し得る。対応する周波数が検出される場合、適切なGLONASSチャネルが埋め込まれたPNコードを使用し得、衛星からの受信器の距離を決定する。この情報はGLONASSチャネル112および114によって、チャネル出力ベクトル113および115をそれぞれ介して提供され得る。チャネル出力ベクトル113および115は、2つのベクトルを形成する4つの信号をそれぞれ含む。2つのベクトルは、同相Iおよび4位相Qであり、これらは、フェーズループ弁別器(復調器)出力の平均信号であり、同相dIおよび4位相dQであり、コードループ弁別器(復調器)出力平均信号である。
【0021】
ASICチップ110は、また、チャネル較正モジュール116を含み得る。1つの例では、チャネル較正モジュール116は、中間周波数に下方変換されたGLONASS衛星信号を含むADC信号109を受信し得る。1つの例では、チャネル較正モジュール116は、任意の下方変換された中間周波数に同調可能であり、中間周波数は、GLONASS衛星周波数に対応する。チャネル較正モジュール116は、任意の数のチャネル入力を含み、種々のGLONASSチャネルを監視する。例えば、各GLONASSチャネル専用のチャネル入力があり得、従って、チャネル較正モジュール116が任意のGLONASSチャネル周波数に同調可能である必要性を除いている。
【0022】
チャネル較正モジュール116は、較正搬送波信号122および基準信号(例えば、較正PN信号124)を生成する回路をさらに含む。搬送波信号122は、較正PN信号124によって較正モジュール116が較正しているチャネルに対応する周波数において変調される搬送波信号である。被変調搬送波信号122は、あたかも受信器と同一のタイムクロックで動作しているかのように、GLONASS衛星の距離信号を模擬する較正信号である。従って、「衛星」信号(被変調搬送波信号122)の送信時間が受信器において、受信された較正信号と送信された較正信号との間のコード遅延と位相シフトにおける差を計算することによって判る。
【0023】
1つの例では、較正PN信号124は、GLONASS信号102に含まれているPN信号成分から分離可能である。例えば、較正PN信号124は、GLONASS信号102のPN信号成分に直交していてもよい。基準信号(例えば、較正PN信号124)は通常ベースバンド信号として述べられるが、それがフロントエンド回路を通って通り過ぎる場合、それは、衛星信号の周波数に整合する周波数に上方変換された基準信号ということを、当業者は理解すべきである。
【0024】
1つの例では、較正PN信号124が受信器のフロントエンド回路を通って送信される場合、受信器のフロントエンド回路は、アンテナとGLONASSチャネル受信器との間の受信器の回路をいう。1つの例では、フロントエンド回路は高周波コンバイナ104、GLONASS RF回路106、およびADC108で構成されている。しかしながら、当業者は、さまざまな受信電子回路構成要素の構成に依存して、フロントエンド回路は、さらに多くの、あるいはより少ない構成要素で構成され得ることを認識するであろう。
【0025】
1つの例では、較正モジュール116は、各チャネルの連続した較正を確実にするために、GLONASSチャネルのそれぞれを通って連続して回転し得る。例えば、較正モジュール116は、所定の長さの時間の後で、時間をかけた受信器バイアスにおける変化を明確にするために、較正チャネルを切替得る。別の例では、較正モジュール116は、ユーザの選択によってチャネルを切替得る。
【0026】
チャネル較正モジュール116は、また、異なるチャネルの可変周波数に起因する受信器のチャネル間バイアスを決定し得る。チャネル較正モジュール116は、ADC信号109内に埋め込まれた受信された較正PN信号124をその内部PN信号と比較することによってこれを達成する。チャネル較正モジュール116は、また、較正モジュール出力信号117−120内に含まれる出力ベクトル生成する。較正モジュール出力信号117−120は、それらが2つのベクトル−同相Iおよび4相Q、同相dIおよび4相dQ−を形成する4つの信号を含むので、チャネル出力ベクトル113および115と同様である。
【0027】
較正モジュール出力信号117−120は、マイクロプロセッサ132に送られ得、マイクロプロセッサ132は、種々のGLONASSチャネルによって決定された距離および位相を調整することによって、これらの信号がチャネル間バイアスを減少するように用いられ得る。当業者は、減少は、チャネル間バイアスを完全にあるいは部分的に除くことを意味し得ることを理解すべきである。較正モジュール出力信号117−120を用いると、マイクロプロセッサ132は、次の数式を用いて、距離および位相補正を計算できる。
【0028】
【数1】

上式において、ΔPは、マイクロプロセッサ132によって生成された補正信号の位相補正成分を表し、ΔRは距離補正成分を表す。Qは4相信号であり、Iは、同相信号であり、これらは、チャネル較正モジュール116によって生成されたフェーズループ弁別器(復調器)出力の平均された信号である。dIは同相信号、dQは4相信号であり、これらは、チャネル較正モジュール116によって生成されたコードループ弁別器(復調器)出力の平均信号である。添字「c」は、これらの信号がチャネル較正モジュール116から受信された信号であることを示す。添字「(I−N)」は、信号に対応するチャネル番号(例えば、Qc(3)は、較正モジュール116のチャネル3からの4相信号出力)を表し、チャネル較正モジュール116は、N個のチャネルを含んでいる。「Arc」は、三角関数、逆正接関数の省略記号である。Kは、スケールファクタ係数であり、加算器220、225、245、および250のゲインの差を説明するために使用され得る。Lを加算器220および225のゲインとし、Mを加算器245および250のゲインとすると、スケールファクタ係数はK=L/Mとなる。スケールファクタは、dIとΔRとの間の正比例を確実にする。
【0029】
上で検討したように、チャネル較正モジュール116は、受信器100と同じあるいは異なる数のチャネルを含み得る。従って、受信器100に関して、Nは、較正モジュール116のチャネル数ではなく、受信器100のチャネル数を表す。
【0030】
1つの例では、式1.1がマイクロプロセッサによって使用され、コード周波数/位相制御信号258を生成する。マイクロプロセッサ132は、また、式2.1を使用し得、搬送波周波数/位相制御信号259を生成する。本明細書で使用される「補正信号」は、コード周波数/位相制御信号258および搬送波周波数/位相制御信号259を言う。チャネル112および114が同じコード周波数/位相制御信号258および搬送波周波数/位相制御信号259を受信して示されているが、当業者には、各チャネルは、そのチャネルに特有の補正信号を受信し得ることが容易に理解されるべきである。例えば、チャネル112は、較正モジュール116がチャネル112の周波数に同調している間に生成された補正信号を受信し得る。また、較正モジュール116が後でチャネル114の周波数に同調された場合、チャネル112は、較正モジュール116が前にチャネル112の周波数に同調した間に受信された、同じ補正信号を受信し続ける。さらに、チャネル114は、較正モジュール116がチャネル114に同調されている間に生成された補正信号を受信し得る。
【0031】
トラッキングモードでは、上の式は、Q<<1である事実から、近似を用いて簡単にされ得る。簡単化した式は、
【0032】
【数2】
である。
【0033】
図1において、マイクロプロセッサ132が、ASIC110の境界に重なって図示されている。マイクロプロセッサ132はASIC110とは別のユニットであり得るあるいは、代わりに、ASIC110内に埋め込まれてもよい。1つの例では、上の計算はマイクロプロセッサ132で実行され得る。別の例では、上の計算は、代わりに、ASIC110で行われ得る。
【0034】
チャネル間バイアス較正受信器100は、また、変調器126を含み得る。変調器126は、較正搬送波信号122を較正PN信号124で変調することによって、被変調信号127を生成し得る。
【0035】
チャネル間バイアス較正受信器100は、また、アップコンバータ128を含み得る。アップコンバータ128は、被変調信号127の周波数をGLONASS信号102の周波数に変換する。1つの例では、被変調信号127はアップコンバータ128に送られ、ここでは、信号の周波数がGLONASS信号102に整合するように増加される。アップコンバータ信号は較正信号129である。較正信号129は、高周波コンバイナ104に送られ得、ここでは、GLONASS信号102を組み合わされ、組合せ信号105を生成する。較正信号129は、コード(グループ)遅延およびフロントエンド回路によって起こされる搬送波位相シフトを決定する較正ユニット116によって使用される、対応するGLONASS搬送波周波数上に重畳され、基準PNコードを提供する。
【0036】
チャネル間バイアス較正受信器100は、また、局部発振器基準130を含む。局部発振器基準130は、発振器基準信号131を生成し得る。1つの例では、発振器基準寝具緒131は、アップコンバータ128、GLONASS RF回路106、およびASICチップ110に送られ得る。当業者は、発振器基準信号131が、発振器基準を必要とするチャネル間バイアス較正受信器100の他の較正構成要素に送られ得ることを理解すべきである。1つの例では、局部発振器基準130は、周波数変換のためのすべてのRF回路に必要とされる安定な基準周波数を生成し、ASICおよび受信器時間計測のデジタル処理のための基準クロックを提供する。
【0037】
図2は、較正モジュール116の例示的な模式ダイアグラムを示している。1つの例では、較正モジュール116は、チャネル間バイアス較正受信器100のフロントエンド回路を通って伝搬される基準信号を生成する。較正モジュール116は、また、遅延した基準信号を送られた基準信号と比較することによって、フロントエンド回路に関連する遅延を測定し得る。較正モジュール116は、フロントエンド回路に関連する受信器のチャネル間バイアスを減少するために、測定された遅延を使用する。
【0038】
1つの例では、較正モジュール116は、デジタル乗算器205および230に送られ得るADC信号109を受信する。デジタル乗算器205および230は、ADC信号109をPNコード信号256と乗じて、相関器信号206および弁別器信号231をそれぞれ生成する。相関器信号206は、入力GLONASS信号とPN生成器255によって生成された基準信号との間の相関を表す。弁別器信号231は、ADC信号109内に埋め込まれた入力PNコードとPN生成器255によって生成された基準PNコードとの間のミスアライメント(誤差)を表す。
【0039】
1つの例では、相関器信号206は、デジタル乗算器210および215に送られ得る。デジタル乗算器210は、相関器信号206を正弦信号208と乗じ、信号211を生成する。信号211は、その後、加算器220、入力シーケンスの番号を前のクロックサイクルから事前に格納された値に加えることを意味する積算加算器に送られる。従って、加算器220は、相関器構成上のデジタルフィルタとして働き、入力信号をある期間に渡って平均する。1つの例では、期間は、1msであり得る。加算器220の出力は、較正モジュール出力117であり、較正モジュール出力117は、マイクロプロセッサ132に送られる較正モジュール出力信号のI(同相)成分である。
【0040】
1つの例では、相関器信号206は、また、デジタル乗算器215に送られ得る。デジタル乗算器215は、相関器信号206を余弦信号214と乗じ、信号216を生成する。信号216は、その後、加算器225、入力シーケンスの番号を前のクロックサイクルから事前に格納された値に加える積算加算器に送られる。従って、加算器225は、相関器構成上のデジタルフィルタとして働き、入力信号をある期間に渡って平均する。1つの例では、期間は、1msであり得る。加算器225の出力は、較正モジュール出力信号118であり、較正モジュール出力信号118は、マイクロプロセッサ132に送られる較正モジュール出力信号118のQ(4相)成分である。
【0041】
1つの例では、弁別器信号231は、デジタル乗算器235および240に送られ得る。デジタル乗算器235は、弁別器信号231を余弦信号214と乗じ、信号236を生成する。信号236は、その後、加算器245、入力シーケンスの番号を前のクロックサイクルからの前に格納された値を加えることを意味する積算加算器に送られる。従って、加算器245は、相関器構成上のデジタルフィルタとして働き、入力信号をある期間に渡って平均する。1つの例では、期間は、1msであり得る。加算器245の出力は、較正モジュール出力信号119であり、これは、マイクロプロセッサ132に送られた較正モジュール出力信号のdQ(4相の導関数)成分である。
【0042】
1つの例では、弁別器信号231は、また、デジタル乗算器240に送られる。デジタル乗算器240は、弁別器信号231を正弦信号208と乗じ、信号241を生成する。信号241は、その後、加算器250、入力シーケンスの番号を前のクロックサイクルから事前に格納された値に加える積算加算器に送られる。従って、加算器250は、弁別器構成上のデジタルフィルタとして働き、入力信号をある期間に渡って平均する。1つの例では、期間は、1msであり得る。加算器250の出力は、較正モジュール出力信号120であり、較正モジュール信号120は、マイクロプロセッサ132に送られた較正モジュール出力信号のdI(I相の導関数)成分である。
【0043】
1つの例では、較正モジュール116は、また、発振器基準信号131を入力として受信し得る。発振器基準信号131は、コードNCO260に送られ得る。コードNCO260は、発振器基準信号131およびコード周波数/位相制御信号258を受信する。コード周波数/位相制御信号258は、マイクロプロセッサ132によって、較正モジュール出力信号117−120および上にあげた式2.1を用いて生成される。コードNCO260は、発振器基準信号131およびコート周波数/位相制御信号258を使用し、コードNCO信号261を生成し、PN生成器255を駆動する。PN生成器は、NCO信号261を生成し、PNコード信号256を生成する。
【0044】
1つの例では、発振器基準信号131は、また、数値制御発振器270(搬送波NCO)に送られ得る。搬送波NCO270は、発振器基準131および搬送波周波数/位相制御信号259を受信する。搬送波周波数/位相制御信号259は、マイクロプロセッサ231によって、較正モジュール出力信号117−120および上記の式1.1を用いて生成される。搬送波NCO270は、発振器基準信号131および搬送波周波数/位相制御信号259を使用し、搬送波NCO信号258を生成する。搬送波NCO信号258は、正弦/余弦テーブル265に送られ、基準搬送波信号を所望の周波数と位相で生成する。正弦/余弦テーブル265は、正弦信号208および余弦信号214を生成する。
【0045】
1つの例では、較正モジュール116は、また、デジタル−アナログ変換器(DAC)275および280を含む。DAC275は、PNコード信号256をPN生成器255から受信する。DAC275は、デジタル入力信号を、アナログ信号である較正PN信号124に変換する。同様に、DAC280は、デジタル正弦信号208を受信し、それをアナログ信号である較正搬送波信号122に変換する。
【0046】
図3は、例示GLONASSチャネルの模式的ダイアグラムを図示している。1つの例では、チャネル112および114は図3によって図示された模式的ダイアグラムによって表される。図3の模式的ダイアグラムは、図3がDAC275、280、およびそれらのそれぞれの入力および出力信号を含まない点を除いて、図2のそれと同等である。
【0047】
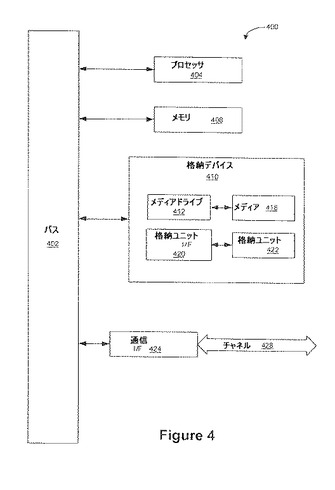
図4は、本発明の実施形態に処理機能を実装するために採用され得る、典型的なコンピュータシステム400を例示している。このタイプのコンピュータシステムは、例えば、クライアントおよびサーバにおいて使用され得る。当業者は、また、他のコンピュータシステムあるいはアーキテクチャを用いて、本発明の実装する方法を認識するであろう。コンピュータシステム400は、例えば、所与の用途または環境にとって望ましいか、あるいは適切であり得るような、デスクトップ、ラップトップまたはノートブックコンピュータ、携帯型コンピュータデバイス(PDA、セルフォン、パームトップ等)、メインフレーム、サーバ、クライアント、あるいは、任意の他のタイプの特別な目的のコンピュータデバイス、または汎用目的のコンピュータデバイスを示す。コンピュータシステム400は、プロセッサ404のような1つ以上のプロセッサを含み得る。プロセッサ404は、例えば、マイクロプロセッサ、マイクロコントローラあるいは、他の制御ロジックのような、汎用目的の処理エンジンまたは特別な目的の処理エンジンを用いて実装され得る。この例では、プロセッサ404は、バス402あるいは他の通信媒体に接続されている。
【0048】
コンピュータシステム400は、また、情報およびプロセッサ404によって実行される命令を格納する、ランダムアクセスメモリ(RAM)または他のダイナミックメモリのようなメインメモリ408を含み得る。メインメモリ408は、また、プロセッサ404によって実行されるべき命令の実行の間、一時的な変数あるいは他の中間的な情報を格納するために使用され得る。コンピュータシステム400は、同様に、読み取り専用メモリ(「ROM」)またはスタティック情報およびプロセッサ404のための命令を格納するために、バス402に結合された他のスタティック格納デバイスを含む。
【0049】
コンピュータシステム400は、また、情報格納システム410を含み得る、情報格納システム410は、例えば、メディアドライブ412および取り外し可能な格納媒体インターフェイス420を含み得る。メディアドライブ412は、固定のあるいは取り外し可能な格納媒体(例えば、ハードディスクドライブ、フロッピー(登録商標)ディスクドライブ、磁気テープドライブ、光学ディスクドライブ、CDまたはDVDドライブ(RまたはRW)、あるいは他の取り外し可能なメディアドライブまたは固定のメディアドライブ)を支持するドライブまたは他の機構を含み得る。格納媒体418は、例えば、ハードディスク、フロッピー(登録商標)ディスク、磁気テープ、光学ディスク、CDまたはDVD、あるいはメディアドライブ412によって読まれ、書き込める固定の媒体または取り外し可能な媒体を含み得る。これらの例が示すように、格納媒体418は、媒体内に特定のコンピュータソフトウェアまたはデータが格納されたコンピュータ読み取り可能な格納媒体を含み得る。
【0050】
代替の実施形態では、情報格納システム410は、他の同様な構成要素を含み得、コンピュータプログラムあるいは他の命令あるいはデータが、コンピュータシステム400の中にロードされることを可能にする。そのような構成要素は、例えば、プログラムカートリッジおよびカートリッジインターフェイス、取り外し可能メモリ(例えば、フラッシュメモリあるいは他の取り外し可能メモリモジュール)およびメモリスロットのような、取り外し可能な格納ユニット422およびインターフェイス420を含み得、ソフトウェアおよびデータが取り外し可能格納ユニット418からコンピュータシステム400に転送されることを可能にする。
【0051】
コンピュータシステム400は、また、通信インターフェイス424を含む。通信インターフェイス424は、ソフトウェアおよびデータがコンピュータシステム400と外部デバイスとの間で転送されることを可能にするように使用され得る。通信インターフェイス424の例は、モデム、ネットワークインターフェイス(イーサーネット、あるいは、他のN1Cカード)、通信ポート(例えば、USBポート)、PCMCIAスロットおよびカード等を含み得る。通信インターフェイス424を介するソフトウェアおよびデータ転送は、電子的、電磁的、光学的あるいは、通信インターフェイス424によって受信される互換性のある他の信号であり得る信号の形である。これらの信号は、チャネル428を介して通信インターフェイス424に提供される。このチャネル428は、信号を保持し得、無線媒体、ワイヤまたはケーブル、光ファイバ、あるいは他の通信媒体を用いて実装され得る。チャネルのいくつかの例は、電話回線、セルラーフォンリンク、RFリンク、ネットワークインターフェイス、ローカルネットワークまたは広域ネットワーク、および他の通信チャネルを含む。
【0052】
本文書において、用語「コンピュータプログラム製品」、「コンピュータ読み取り可能な格納媒体」および同様なものは、例えば、メモリ408、格納媒体418、あるいは格納ユニット422のような、物理的、具体的、媒体を一般に指すように使用され得る。これらのおよび他の形式のコンピュータ読み取り可能な格納媒体は、プロセッサ404によって使用されプロセッサに特定の動作を実行させる1つ以上の命令に含まれる。そのような命令は、通常「コンピュータプログラムコード」(コンピュータプログラムの形式でグループに分類されるか、または他のグループに分類される)と言われ、実行される場合、コンピュータシステム400が本発明の実施形態の特徴あるいは機能を実行する。コードは、プロセッサに特定の動作を直接実行させ、動作を実行するようにコンパイルされ、または、他のソフトウェア、ハードウェア、もしくはファームウェア要素(例えば、標準機能を実行するためのライブラリ)と動作するように組み合わされることに留意が必要である。
【0053】
要素がソフトウェアを使用して実装される実施形態では、ソフトウェアは、コンピュータ読み取り可能な格納媒体に格納され得、例えば、取り外し可能格納媒体418、ドライブ412、あるいは、通信インターフェイス424を用いて、コンピュータシステム400に、ロードされる。制御ロジック(この例では、ソフトウェア命令あるいはコンピュータプログラムコード)は、プロセッサ404によって実行される場合、プロセッサ404に本明細書に記載されたような本発明の機能を実行させる。
【0054】
上記の明確性のための記載が、異なる機能ユニットを参照して本発明の実施形態を記述してきたことが容易に理解されるであろう。しかしながら、異なる機能ユニットの間の機能の任意で適切な分散が、本発明から外れることなく使用され得ることは明白であろう。従って、本発明の具体的な機能ユニットへの言及は、厳密な論理あるいは物理的構造あるいは構成よりも、単に、記載された機能を提供するための適切な手段への参照として見られるべきである。
【0055】
本発明は、ハードウェア、ソフトウェア、ファームウェア、あるいは、それらの任意の組合せを含む任意の適切な形で実装され得る。本発明の異なる態様が、1つ以上のデータプロセッサあるいは、デジタル信号プロセッサ上で動作するコンピュータソフトウェアあるいはファームウェアとして少なくとも部分的に実装され得る。本発明の実施形態の要素および構成要素は、任意の適切な方法で物理的に、機能的に、あるいは論理的に実装され得る。実際、機能は、単一のユニットに、複数のユニットに、あるいは、他の機能ユニットの一部分として実装され得る。そのように、本発明は、単一のユニットに実装され得、あるいは、異なるユニットおよびプロセッサの間に、物理的におよび機能的に分散され得る。
【0056】
本発明がいくつかの実施形態に関連して記述されてきたが、本明細書に述べた特定の形に限定されることは意図していない。むしろ、本発明の態様は、特許請求の範囲によってのみ制限される。さらに、特徴は特定の実施形態に関して記述されたように見え得るが、当業者は、記載された実施形態の種々の特徴が本発明に従って組合され得ることを認識するであろう。さらに、実施形態に関して記述された本発明の態様は、発明として独立であり得る。
【0057】
さらに、個別に上げられた、複数の手段、要素あるいは方法のステップは、例えば、単一ユニットあるいはプロセッサによって実装され得る。さらに、有利に組み合わせた、異なる特許請求範囲の包含は、特徴の組合せが実際的でない、あるいは有利ではないことを示唆しない。また、特許請求項の1つのカテゴリの特徴の包含は、このカテゴリへの制限を意味しなく、特徴が、他の特許請求項のカテゴリに等しく、適切なように応用可能であり得る。
【0058】
さらに、種々の修正および代替が、本発明の精神および範囲から外れることなく、当業者によってなされ得ることが容易に理解されるであろう。本発明は、前述例示的詳細によって制限されるのではなく、特許請求の範囲に従って定められるべきものである。
【符号の説明】
【0059】
100 チャネル間バイアス較正受信器
101 衛星
102 GLONASS信号
104 高周波コンバイナ
129 較正信号
106 GLONASS RF回路
107 RF回路出力信号
108 アナログ−デジタル変換器(ADC)
109 ADC信号
【技術分野】
【0001】
1.分野
本発明は、ナビゲーション衛星システムのチャネル間バイアスの較正に関する。
【背景技術】
【0002】
2.関連技術
グローバルナビゲーション衛星システムGPSおよびGLONASSの信号を利用するナビゲーション受信器は、種々の位置決定タスクを非常に高い精度で可能にする。GLONASS受信器は、ナビゲーション衛星によって送信された無線信号を受信し、処理する。衛星信号は、キャリア高調波信号であり、擬似ランダムバイナリコードによって変調されており、擬似ランダムバイナリコードは、受信器側では、ローカル基準時計に対する遅延を測定するために使用される。これらの遅延測定は、受信器と衛星との間のいわゆる擬似距離を決定するのに使用される。擬似距離は、受信器のローカル時計が衛星搭載の時計とは異なっているので、真の幾何学的距離とは異なっている。視界にある衛星の数が4つ以上である場合、測定された擬似距離は、処理され、ユーザの単一点位置X=(x,y,z)T(すべてのベクトルは列ベクトルとして表され、記号Tは、行列/ベクトルの転置を表す)を決定し、そして受信器時計のオフセットに対して補償し得る。
【0003】
位置精度の改善に対する必要性は、最終的に「差動ナビゲーション/ポジショニング」の開発を導いた。このモードでは、ユーザの位置は、基地の座標が高い精度で知られていることを仮定して、基地受信器に接続されたアンテナに対して決定される。基地受信器は、その測定値(または、フル測定に対する補正)をモバイルナビゲーション受信器「Rover」に送信する。Rover受信器は、これらの補正を使用して、データ処理において、それ自体の測定値を精緻化する。これらのアプローチに対する合理性は、基地およびRover側の擬似距離および擬似位相測定誤差の大部分が、強力に相関しているので、差動測定を使用することが、実質的に位置決定精度を改善する。
【0004】
GLONASS受信器の基本的なタスクは、いくつかのGLONASS衛星への距離を測定し、受信器の座標を計算することである。衛星への距離は、衛星から、受信された信号が処理される受信器電子回路のコアまでの信号の進行時間を測定することによって、測定される。基地受信器(既知の点)からの使用されるデータは、Roverの共通誤差を除去し、正確な結果をもたらす。各衛星から受信器電子回路への信号経路は、2つの部分からなり、それらは、1)衛星から受信器アンテナへの空間における直接経路と、2)受信器アンテナから受信器電子回路までの部分とから構成される。第1の経路は、各衛星に一意的である。第2の経路は、すべての衛星に共通であり、アンテナ電子回路、アンテナケーブルを通って、受信器のアナログおよびデジタルセクションへ信号が進行する経路である。第2の経路を通る信号の進行時間は、「受信器バイアス」と言われる。受信器バイアスがすべての衛星で同じである限り、受信器バイアスは、受信器時計のオフセットの成分として働き、我々は、第4の未知数(x,y,zとともに)として解く。言い換えれば、受信器バイアスがすべての衛星に同一であるならば、位置計算に影響は与えない。
【0005】
受信器バイアスがすべての衛星に同一であるという仮定は、GPSでは真であるが、GLONASSでは真ではない。理由は、受信器バイアスは、衛星信号周波数に依存するからである。すべてのGPS衛星は、同一周波数で送信しており、それらはすべて同一の受信器バイアスを生成する。しかしながら、GLONASS衛星は、異なる周波数で送信し、各GLONASS衛星は異なる受信器バイアスを発生する。技術的用語では、GLONASS衛星は、チャネル間バイアスを起こし、このチャネル間バイアスを考慮にいれない場合、位置精度を著しく低下し得る。幸いなことに、基地受信器とRover受信器との間のすべての共通誤差は相殺される。それ故、基地受信器およびRover受信器におけるGLONASSチャネル間バイアスの受信器受信器大きさが同一である場合、これらのバイアスは相殺され、これらは位置精度を低下させない。そのようなケースでは、GLONASS衛星はGPS衛星と同じくらい良好に働く。しかしながら、このことはほとんど起こらない。このことは、チャネル間バイアスの大きさが受信器設計およびその電子構成要素のみでなく、温度および電子構成要素におけるわずかの変動にも依存する事実に起因する。基地受信器およびRover受信器が同一の製造者からのものであり全く同一の設計、構成要素構成要素および製造日を有する最良の場合でも、なおも温度およびささいな構成要素構成要素の差の問題がある。GLONASSチャネル間バイアスの大きさが、GLONASS衛星の正確な応用に対する使用を禁止し得る。
【0006】
目的がセンチメートルあるいはサブセンチメートルの精度を達成することである場合、GLONASSチャネル間バイアスを取り扱うのは容易なタスクではない。現在、数社の製造者は、GLONASSチャネル間バイアスを単に無視している。チャネル間バイアスが顕著な場合、1つの解決法は、GPSおよびGLONASSを使用して曖昧さを解決し、その後、GLONASS測定値を無視するか、またはGLONASS測定値に対してかなり弱い重み付けをすることである。いくつかの受信器によっては、基地とRoverとの間のチャネル間バイアスは許容できないものであり、受信器ファームウェアはGLONASS衛星を無視し、GPS衛星のみに基づく解を提供する。この方法の問題の取り扱いは、ユーザがなぜかれらのGPS+GLONASS受信器が、GPSのみの受信器に対してどんな改善も示さないのかを知ることができない。受信器ファームウェアが、高いチャネル間バイアスを有するGLONASS衛星を隔離できない場合、それは不正確な結果を提供する。これは、ユーザに誤った結果を受け入れさせる深刻な問題である。他の製造者は、GLONASSチャネル間バイアスを、プリプロダクション受信器のサンプルで測定し、これらのバイアスファームウェアにハードコードしようと試みている。これは、前向きなステップであるが、まだサンプルに比べて電子構成要素間に差があり、それらの特性が温度および時間によって変化するので、決して、問題を処置できるものではない。
【発明の概要】
【発明が解決しようとする課題】
【0007】
従って、受信器特定のチャネル間バイアスを動的に説明し、較正する解決法が必要とされる。
【課題を解決するための手段】
【0008】
本発明の実施形態は、GLONASSチャネル間バイアスの較正を対象にしている。実施形態は、基準信号を生成し、ナビゲーション受信器のフロントエンド回路に関連したバイアス遅延を、遅延基準信号を基準信号と比較することによって測定する。遅延基準信号は、ナビゲーション受信器のフロントエンド回路を通る、基準信号の伝搬に基づいている。フロントエンド回路は、基準信号および受信された衛星信号を処理する。較正モジュールは、補正信号を生成し、チャネル間バイアスを減少する。別の実施形態では、マイクロプロセッサが補正信号を生成し得る。
【0009】
実施形態は、補正信号を受信された衛星信号にさらに適用し得る。1つの例では、補正信号は、位相補正成分および距離補正成分を含み得る。
【0010】
別の例では、基準信号は、受信された衛星信号と同一の周波数を変調し得る。1つの例では、基準信号は、コード構造の違いによって、受信された衛星信号の疑似ランダムノイズ信号成分から分離可能である。さらに、フロントエンド回路は、受信された衛星信号および基準信号を下方変換するためのダウンコンバータを含み得る。
【0011】
本明細書に記載された多くの技術は、ハードウェア、ファームウェア、ソフトウェアあるいはそれらの組み合わせにおいて実装され得る。1つの例では、技術が、プログラム可能なコンピュータ上で実行するコンピュータプログラムに実装され得、プログラム可能なコンピュータは、それぞれ、プロセッサ、プロセッサによって読み取り可能な格納媒体(揮発性メモリ、不揮発性メモリ、あるいは格納構成要素を含む)および、適切な入力および出力デバイスを含む。プログラムコードが、記述された機能を実行する入力デバイスを用いて入力されたデータに適用され、出力情報を生成する。出力情報は、1つ以上の出力デバイスに適用される。さらに、各プログラムは好ましくは、高レベルの手続またはオブジェクト志向のプログラム言語に実装され得、コンピュータシステムと通信する。しかしながら、プログラムは、必要に応じて、アセンブリ言語あるいは機械言語に実装され得る。どの場合でも、言語はコンパイル言語あるいはインタープレット言語である。
【0012】
本発明は、さらに以下の手段を提供する。
(項目1)
ナビゲーション受信器のチャネル間バイアスを較正する装置であって、
基準信号を生成する基準信号回路と、
遅延基準信号を該基準信号と比較することによって、該ナビゲーション受信機のフロントエンド回路に関連するバイアス遅延を測定する測定ロジックであって、該遅延基準信号は、該フロントエンド回路を通る該基準信号の伝搬に基づいており、該フロントエンド回路は、該基準信号と受信衛星信号とを処理する、測定ロジックと、
チャネル間バイアスを低減するために補正信号を生成する較正ロジックと
を備えている、装置。
(項目2)
上記補正信号は、上記受信衛星信号に適用される、上記項目に記載の装置。
(項目3)
上記補正信号は、位相補正成分と距離補正成分とを含む、上記項目のいずれかに記載の装置。
(項目4)
上記基準信号は、上記受信衛星信号と同じ搬送波周波数を変調する、上記項目のいずれかに記載の装置。
(項目5)
上記基準信号は、異なるコード構造に起因して、上記受信衛星信号の擬似ランダムノイズ信号とは分離可能である、上記項目のいずれかに記載の装置。
(項目6)
上記フロントエンド回路は、上記受信衛星信号および上記基準信号を下方変換するダウンコンバータを含む、上記項目のいずれかに記載の装置。
(項目7)
ナビゲーション受信機のチャネル間バイアスを較正する方法であって、
基準信号を生成することと、
遅延基準信号を該基準信号と比較することによって、該ナビゲーション受信機のフロントエンド回路と関連するバイアス遅延を測定することであって、該遅延基準信号は、該ナビゲーション受信機の該フロントエンド回路を通る該基準信号の伝搬に基づき、該フロントエンド回路は該基準信号と受信衛星信号とに基づく、ことと、
チャネル間バイアスを低減するために補正信号を生成することと
を包含する、方法。
(項目8)
上記補正信号は、上記受信衛星信号に適用される、上記項目に記載の方法。
(項目9)
上記補正信号は、位相補正成分と距離補正成分とを含む、上記項目のいずれかに記載の方法。
(項目10)
上記基準信号は、上記受信衛星信号と同じ搬送波周波数を変調する、上記項目のいずれかに記載の方法。
(項目11)
上記基準信号は、異なるコード構造に起因して、上記受信衛星信号の擬似ランダムノイズ信号とは分離可能である、上記項目のいずれかに記載の方法。
(項目12)
上記フロントエンド回路は、上記受信衛星信号および上記基準信号を下方変換するダウンコンバータを含む、上記項目のいずれかに記載の方法。
(項目13)
ナビゲーション受信器のチャネル間バイアスを較正するプログラムコードを含むコンピュータ読み取り可能格納媒体であって、該プログラムコードは、
基準信号を生成することと、
遅延基準信号を該基準信号と比較することによって、該ナビゲーション受信機のフロントエンド回路と関連するバイアス遅延を測定することであって、該遅延基準信号は、該ナビゲーション受信器の該フロントエンド回路を通る該基準信号の伝搬に基づき、該フロントエンド回路は該基準信号と受信衛星信号とに基づく、ことと、
チャネル間バイアスを低減するために補正信号を生成することと
を行う、コンピュータ読み取り可能格納媒体。
(項目14)
上記補正信号は、上記受信衛星信号に適用される、上記項目に記載のコンピュータ読み取り可能格納媒体。
(項目15)
上記補正信号は、位相補正成分と距離補正成分とを含む、上記項目のいずれかに記載のコンピュータ読み取り可能格納媒体。
(項目16)
上記基準信号は、上記受信衛星信号と同じ搬送波周波数を変調する、上記項目のいずれかに記載のコンピュータ読み取り可能格納媒体。
(項目17)
上記基準信号は、異なるコード構造に起因して、上記受信衛星信号の擬似ランダムノイズ信号とは分離可能である、上記項目のいずれかに記載のコンピュータ読み取り可能格納媒体。
(項目18)
上記フロントエンド回路は、上記受信衛星信号および上記基準信号を下方変換するダウンコンバータを含む、上記項目のいずれかに記載のコンピュータ読み取り可能格納媒体。
(摘要)
ナビゲーション受信機の動的なチャネル間バイアス較正が提供される。基準信号は、受信器のフロントエンド回路を介して伝搬される。フロントエンド回路を介した基準信号の伝搬によって起こされた遅延が、測定され得る。ナビゲーション受信機のチャネル間バイアスは、受信器のフロントエンド回路に関連する測定された遅延を用いて減少される。
【図面の簡単な説明】
【0013】
【図1】図1は、例示的チャネル間バイアス較正受信器の模式的ダイアグラムを例示している。
【図2】図2は、例示的較正モジュールの模式的ダイアグラムを例示している。
【図3】図3は、例示的GLONASS/GPSチャネルの模式的ダイアグラムを例示している。
【図4】図4は、本発明のある実施形態における、いくつかの処理機能あるいはすべての処理機能を実装するために採用され得る典型的なコンピュータシステムを例示している。
【発明を実施するための形態】
【0014】
以下の記述は、当業者が本発明を製造し使用することを可能にするように提示されており、特定の用途およびそれらの要件に関連して提供される。実施形態への種々の修正が、当業者には容易に明らかであり、本明細書において規定された一般的な原理は、本発明の精神および範囲を外れることなく他の実施形態および用途に適用され得る。さらに、以下の記述では、多くの詳細が、説明の目的で述べられている。しかしながら、当業者は、本発明がこれらの具体的な詳細の使用なしで実施され得ることを理解するであろう。他の例では、本発明の記述が不必要な詳細によって不明確にならないように、周知の構造およびデバイスは、ブロックダイアグラムの形で示されている。従って、本発明は示される実施形態に限定されないが、本明細書に開示された原理および特徴は、一貫しているもっとも広い範囲に従うべきである。
【0015】
本発明は特定の例および例示の図面に関して述べられているが、当業者は、本発明が例または記述された図に限定されないことを認識するであろう。当業者は、種々の実施形態の動作が、ハードウェア、ソフトウェア、ファームウェア、またはそれらの組み合わせを用いて、適切に実装され得ることを認識するであろう。例えば、いくつかのプロセスは、プロセッサまたは他のデジタル回路を用いて、ソフトウェア、ファームウェアあるいはハードワイヤロジックの制御の下で実行され得る。(用語「ロジック」は本明細書では、当業者に認識され得るような、引用された機能を実行する、固定されたハードウェア、プログラム可能なロジックあるいはそれらの適切な組み合わせを意味する)。ソフトウェア、およびファームウェアは、コンピュータ読み取り可能な格納媒体上に格納され得る。当業者に周知のように、いくつかの他のプロセスがアナログ回路を用いて実装され得る。さらに、メモリまたは他の格納が、通信構成要素構成要素と同じく本発明の実施形態に採用され得る。
【0016】
図1は、本明細書に開示された実施形態によるチャネル間バイアス較正受信器の一般的な構成を例示している。1つの例では、チャネル間バイアス較正受信器100は、GLONASS信号102を衛星101から受信する。GLONASS信号102は、2つの疑似ノイズ(「PN」)コード成分、直交搬送波成分上にある粗コードおよび密コードを含み得、較正受信器100によって使用され得、受信器の位置を決定する。例えば、典型的なGLONASS信号102は、2つのPNコード成分によって変調された搬送波信号を含む。搬送波信号の周波数は、衛星特有であり得、従って、各GLONASS衛星は、異なる周波数でGLONASS信号を送信し得る。
【0017】
チャネル間バイアス較正受信器100は、また、高周波コンバイナ104を含む。高周波コンバイナ104は、加算器として働き、2つ以上の信号を組み合わせる。1つの例では、高周波コンバイナ104は、GLONASS信号102を較正信号129と共に受信し、それらを組み合わせて組み合わせ信号105を生成する。
【0018】
チャネル間バイアス較正受信器100は、また、GLONASS RF回路106を含む。1つの例では、GLONASS RF回路106は、入力アナログ組合せ信号105を、アナログ−デジタル変換器によって処理され得る信号に変調し、その後、衛星信号検出回路が受信された衛星信号を検出する。GLONASS RF回路106は、例えば、フィルタ、増幅器、および入力信号をベースバンドに変換するダウンコンバータを含み得る。ダウンコンバータは、代わりに、全体の受信周波数計画設計および利用可能な電子構成要素に依存して、中間周波数に変換し得ることを理解すべきである。当業者は、追加回路がまた、含まれ得、アナログ信号を適切に変調することを認識するであろう。GLONASS RF回路106は、RF回路出力信号107を生成し、RF回路出力信号107は、アナログ−デジタル変換器(「ADC」)108によって、デジタル信号であるADC信号109に変換される。ADC信号109は、RF回路出力信号107の多重繰り返しサンプリングによって生成されたデジタル信号である。デジタル信号のスペクトルは、ベースバンドのアナログ信号のイメージを含み得るが、さらなるデジタル処理は、受信器のアーキテクチャに依存する。例えば、受信器は、複数のデジタルスペクトル画像のうちの1つをベースバンドに変換し得るか、または、ベースバンド画像自体を処理し得る。
【0019】
チャネル間バイアス較正受信器100は、また、チャネル112および114のような複数のGLONASSチャネルを含み得る。任意の数のチャネルが提供され得ることを理解すべきである。GLONASSチャネル112および114は、ADC信号109に含まれるGLONASS PNコードを復調する復調器、PNコード基準生成器、PNコード生成器に加えて搬送波周波数復調器(例えばフェーズロックループ−PLLの位相検出器)も駆動する数値制御発振器(コードNCO)、および、基準搬送波周波数および位相を形成する数値制御発振器(搬送波NCO)をそれぞれ含み得る。1つの例では、チャネル112およびチャネル114の数値制御発振器(コードNCO)は、コード周波数/位相制御信号258を入力として受信し得る。さらに、チャネル112およびチャネル114の数値制御発振器(搬送波NCO)は、搬送波周波数/位相制御信号259を入力として受信し得る。コード周波数/位相制御信号258および搬送波周波数/位相制御信号259が以下に詳細に記述される。
【0020】
1つの例では、GLONASSチャネルは、特定用途向け集積回路(「ASIC」)チップ110上に常駐し得る。対応する周波数が検出される場合、適切なGLONASSチャネルが埋め込まれたPNコードを使用し得、衛星からの受信器の距離を決定する。この情報はGLONASSチャネル112および114によって、チャネル出力ベクトル113および115をそれぞれ介して提供され得る。チャネル出力ベクトル113および115は、2つのベクトルを形成する4つの信号をそれぞれ含む。2つのベクトルは、同相Iおよび4位相Qであり、これらは、フェーズループ弁別器(復調器)出力の平均信号であり、同相dIおよび4位相dQであり、コードループ弁別器(復調器)出力平均信号である。
【0021】
ASICチップ110は、また、チャネル較正モジュール116を含み得る。1つの例では、チャネル較正モジュール116は、中間周波数に下方変換されたGLONASS衛星信号を含むADC信号109を受信し得る。1つの例では、チャネル較正モジュール116は、任意の下方変換された中間周波数に同調可能であり、中間周波数は、GLONASS衛星周波数に対応する。チャネル較正モジュール116は、任意の数のチャネル入力を含み、種々のGLONASSチャネルを監視する。例えば、各GLONASSチャネル専用のチャネル入力があり得、従って、チャネル較正モジュール116が任意のGLONASSチャネル周波数に同調可能である必要性を除いている。
【0022】
チャネル較正モジュール116は、較正搬送波信号122および基準信号(例えば、較正PN信号124)を生成する回路をさらに含む。搬送波信号122は、較正PN信号124によって較正モジュール116が較正しているチャネルに対応する周波数において変調される搬送波信号である。被変調搬送波信号122は、あたかも受信器と同一のタイムクロックで動作しているかのように、GLONASS衛星の距離信号を模擬する較正信号である。従って、「衛星」信号(被変調搬送波信号122)の送信時間が受信器において、受信された較正信号と送信された較正信号との間のコード遅延と位相シフトにおける差を計算することによって判る。
【0023】
1つの例では、較正PN信号124は、GLONASS信号102に含まれているPN信号成分から分離可能である。例えば、較正PN信号124は、GLONASS信号102のPN信号成分に直交していてもよい。基準信号(例えば、較正PN信号124)は通常ベースバンド信号として述べられるが、それがフロントエンド回路を通って通り過ぎる場合、それは、衛星信号の周波数に整合する周波数に上方変換された基準信号ということを、当業者は理解すべきである。
【0024】
1つの例では、較正PN信号124が受信器のフロントエンド回路を通って送信される場合、受信器のフロントエンド回路は、アンテナとGLONASSチャネル受信器との間の受信器の回路をいう。1つの例では、フロントエンド回路は高周波コンバイナ104、GLONASS RF回路106、およびADC108で構成されている。しかしながら、当業者は、さまざまな受信電子回路構成要素の構成に依存して、フロントエンド回路は、さらに多くの、あるいはより少ない構成要素で構成され得ることを認識するであろう。
【0025】
1つの例では、較正モジュール116は、各チャネルの連続した較正を確実にするために、GLONASSチャネルのそれぞれを通って連続して回転し得る。例えば、較正モジュール116は、所定の長さの時間の後で、時間をかけた受信器バイアスにおける変化を明確にするために、較正チャネルを切替得る。別の例では、較正モジュール116は、ユーザの選択によってチャネルを切替得る。
【0026】
チャネル較正モジュール116は、また、異なるチャネルの可変周波数に起因する受信器のチャネル間バイアスを決定し得る。チャネル較正モジュール116は、ADC信号109内に埋め込まれた受信された較正PN信号124をその内部PN信号と比較することによってこれを達成する。チャネル較正モジュール116は、また、較正モジュール出力信号117−120内に含まれる出力ベクトル生成する。較正モジュール出力信号117−120は、それらが2つのベクトル−同相Iおよび4相Q、同相dIおよび4相dQ−を形成する4つの信号を含むので、チャネル出力ベクトル113および115と同様である。
【0027】
較正モジュール出力信号117−120は、マイクロプロセッサ132に送られ得、マイクロプロセッサ132は、種々のGLONASSチャネルによって決定された距離および位相を調整することによって、これらの信号がチャネル間バイアスを減少するように用いられ得る。当業者は、減少は、チャネル間バイアスを完全にあるいは部分的に除くことを意味し得ることを理解すべきである。較正モジュール出力信号117−120を用いると、マイクロプロセッサ132は、次の数式を用いて、距離および位相補正を計算できる。
【0028】
【数1】
上式において、ΔPは、マイクロプロセッサ132によって生成された補正信号の位相補正成分を表し、ΔRは距離補正成分を表す。Qは4相信号であり、Iは、同相信号であり、これらは、チャネル較正モジュール116によって生成されたフェーズループ弁別器(復調器)出力の平均された信号である。dIは同相信号、dQは4相信号であり、これらは、チャネル較正モジュール116によって生成されたコードループ弁別器(復調器)出力の平均信号である。添字「c」は、これらの信号がチャネル較正モジュール116から受信された信号であることを示す。添字「(I−N)」は、信号に対応するチャネル番号(例えば、Qc(3)は、較正モジュール116のチャネル3からの4相信号出力)を表し、チャネル較正モジュール116は、N個のチャネルを含んでいる。「Arc」は、三角関数、逆正接関数の省略記号である。Kは、スケールファクタ係数であり、加算器220、225、245、および250のゲインの差を説明するために使用され得る。Lを加算器220および225のゲインとし、Mを加算器245および250のゲインとすると、スケールファクタ係数はK=L/Mとなる。スケールファクタは、dIとΔRとの間の正比例を確実にする。
【0029】
上で検討したように、チャネル較正モジュール116は、受信器100と同じあるいは異なる数のチャネルを含み得る。従って、受信器100に関して、Nは、較正モジュール116のチャネル数ではなく、受信器100のチャネル数を表す。
【0030】
1つの例では、式1.1がマイクロプロセッサによって使用され、コード周波数/位相制御信号258を生成する。マイクロプロセッサ132は、また、式2.1を使用し得、搬送波周波数/位相制御信号259を生成する。本明細書で使用される「補正信号」は、コード周波数/位相制御信号258および搬送波周波数/位相制御信号259を言う。チャネル112および114が同じコード周波数/位相制御信号258および搬送波周波数/位相制御信号259を受信して示されているが、当業者には、各チャネルは、そのチャネルに特有の補正信号を受信し得ることが容易に理解されるべきである。例えば、チャネル112は、較正モジュール116がチャネル112の周波数に同調している間に生成された補正信号を受信し得る。また、較正モジュール116が後でチャネル114の周波数に同調された場合、チャネル112は、較正モジュール116が前にチャネル112の周波数に同調した間に受信された、同じ補正信号を受信し続ける。さらに、チャネル114は、較正モジュール116がチャネル114に同調されている間に生成された補正信号を受信し得る。
【0031】
トラッキングモードでは、上の式は、Q<<1である事実から、近似を用いて簡単にされ得る。簡単化した式は、
【0032】
【数2】
である。
【0033】
図1において、マイクロプロセッサ132が、ASIC110の境界に重なって図示されている。マイクロプロセッサ132はASIC110とは別のユニットであり得るあるいは、代わりに、ASIC110内に埋め込まれてもよい。1つの例では、上の計算はマイクロプロセッサ132で実行され得る。別の例では、上の計算は、代わりに、ASIC110で行われ得る。
【0034】
チャネル間バイアス較正受信器100は、また、変調器126を含み得る。変調器126は、較正搬送波信号122を較正PN信号124で変調することによって、被変調信号127を生成し得る。
【0035】
チャネル間バイアス較正受信器100は、また、アップコンバータ128を含み得る。アップコンバータ128は、被変調信号127の周波数をGLONASS信号102の周波数に変換する。1つの例では、被変調信号127はアップコンバータ128に送られ、ここでは、信号の周波数がGLONASS信号102に整合するように増加される。アップコンバータ信号は較正信号129である。較正信号129は、高周波コンバイナ104に送られ得、ここでは、GLONASS信号102を組み合わされ、組合せ信号105を生成する。較正信号129は、コード(グループ)遅延およびフロントエンド回路によって起こされる搬送波位相シフトを決定する較正ユニット116によって使用される、対応するGLONASS搬送波周波数上に重畳され、基準PNコードを提供する。
【0036】
チャネル間バイアス較正受信器100は、また、局部発振器基準130を含む。局部発振器基準130は、発振器基準信号131を生成し得る。1つの例では、発振器基準寝具緒131は、アップコンバータ128、GLONASS RF回路106、およびASICチップ110に送られ得る。当業者は、発振器基準信号131が、発振器基準を必要とするチャネル間バイアス較正受信器100の他の較正構成要素に送られ得ることを理解すべきである。1つの例では、局部発振器基準130は、周波数変換のためのすべてのRF回路に必要とされる安定な基準周波数を生成し、ASICおよび受信器時間計測のデジタル処理のための基準クロックを提供する。
【0037】
図2は、較正モジュール116の例示的な模式ダイアグラムを示している。1つの例では、較正モジュール116は、チャネル間バイアス較正受信器100のフロントエンド回路を通って伝搬される基準信号を生成する。較正モジュール116は、また、遅延した基準信号を送られた基準信号と比較することによって、フロントエンド回路に関連する遅延を測定し得る。較正モジュール116は、フロントエンド回路に関連する受信器のチャネル間バイアスを減少するために、測定された遅延を使用する。
【0038】
1つの例では、較正モジュール116は、デジタル乗算器205および230に送られ得るADC信号109を受信する。デジタル乗算器205および230は、ADC信号109をPNコード信号256と乗じて、相関器信号206および弁別器信号231をそれぞれ生成する。相関器信号206は、入力GLONASS信号とPN生成器255によって生成された基準信号との間の相関を表す。弁別器信号231は、ADC信号109内に埋め込まれた入力PNコードとPN生成器255によって生成された基準PNコードとの間のミスアライメント(誤差)を表す。
【0039】
1つの例では、相関器信号206は、デジタル乗算器210および215に送られ得る。デジタル乗算器210は、相関器信号206を正弦信号208と乗じ、信号211を生成する。信号211は、その後、加算器220、入力シーケンスの番号を前のクロックサイクルから事前に格納された値に加えることを意味する積算加算器に送られる。従って、加算器220は、相関器構成上のデジタルフィルタとして働き、入力信号をある期間に渡って平均する。1つの例では、期間は、1msであり得る。加算器220の出力は、較正モジュール出力117であり、較正モジュール出力117は、マイクロプロセッサ132に送られる較正モジュール出力信号のI(同相)成分である。
【0040】
1つの例では、相関器信号206は、また、デジタル乗算器215に送られ得る。デジタル乗算器215は、相関器信号206を余弦信号214と乗じ、信号216を生成する。信号216は、その後、加算器225、入力シーケンスの番号を前のクロックサイクルから事前に格納された値に加える積算加算器に送られる。従って、加算器225は、相関器構成上のデジタルフィルタとして働き、入力信号をある期間に渡って平均する。1つの例では、期間は、1msであり得る。加算器225の出力は、較正モジュール出力信号118であり、較正モジュール出力信号118は、マイクロプロセッサ132に送られる較正モジュール出力信号118のQ(4相)成分である。
【0041】
1つの例では、弁別器信号231は、デジタル乗算器235および240に送られ得る。デジタル乗算器235は、弁別器信号231を余弦信号214と乗じ、信号236を生成する。信号236は、その後、加算器245、入力シーケンスの番号を前のクロックサイクルからの前に格納された値を加えることを意味する積算加算器に送られる。従って、加算器245は、相関器構成上のデジタルフィルタとして働き、入力信号をある期間に渡って平均する。1つの例では、期間は、1msであり得る。加算器245の出力は、較正モジュール出力信号119であり、これは、マイクロプロセッサ132に送られた較正モジュール出力信号のdQ(4相の導関数)成分である。
【0042】
1つの例では、弁別器信号231は、また、デジタル乗算器240に送られる。デジタル乗算器240は、弁別器信号231を正弦信号208と乗じ、信号241を生成する。信号241は、その後、加算器250、入力シーケンスの番号を前のクロックサイクルから事前に格納された値に加える積算加算器に送られる。従って、加算器250は、弁別器構成上のデジタルフィルタとして働き、入力信号をある期間に渡って平均する。1つの例では、期間は、1msであり得る。加算器250の出力は、較正モジュール出力信号120であり、較正モジュール信号120は、マイクロプロセッサ132に送られた較正モジュール出力信号のdI(I相の導関数)成分である。
【0043】
1つの例では、較正モジュール116は、また、発振器基準信号131を入力として受信し得る。発振器基準信号131は、コードNCO260に送られ得る。コードNCO260は、発振器基準信号131およびコード周波数/位相制御信号258を受信する。コード周波数/位相制御信号258は、マイクロプロセッサ132によって、較正モジュール出力信号117−120および上にあげた式2.1を用いて生成される。コードNCO260は、発振器基準信号131およびコート周波数/位相制御信号258を使用し、コードNCO信号261を生成し、PN生成器255を駆動する。PN生成器は、NCO信号261を生成し、PNコード信号256を生成する。
【0044】
1つの例では、発振器基準信号131は、また、数値制御発振器270(搬送波NCO)に送られ得る。搬送波NCO270は、発振器基準131および搬送波周波数/位相制御信号259を受信する。搬送波周波数/位相制御信号259は、マイクロプロセッサ231によって、較正モジュール出力信号117−120および上記の式1.1を用いて生成される。搬送波NCO270は、発振器基準信号131および搬送波周波数/位相制御信号259を使用し、搬送波NCO信号258を生成する。搬送波NCO信号258は、正弦/余弦テーブル265に送られ、基準搬送波信号を所望の周波数と位相で生成する。正弦/余弦テーブル265は、正弦信号208および余弦信号214を生成する。
【0045】
1つの例では、較正モジュール116は、また、デジタル−アナログ変換器(DAC)275および280を含む。DAC275は、PNコード信号256をPN生成器255から受信する。DAC275は、デジタル入力信号を、アナログ信号である較正PN信号124に変換する。同様に、DAC280は、デジタル正弦信号208を受信し、それをアナログ信号である較正搬送波信号122に変換する。
【0046】
図3は、例示GLONASSチャネルの模式的ダイアグラムを図示している。1つの例では、チャネル112および114は図3によって図示された模式的ダイアグラムによって表される。図3の模式的ダイアグラムは、図3がDAC275、280、およびそれらのそれぞれの入力および出力信号を含まない点を除いて、図2のそれと同等である。
【0047】
図4は、本発明の実施形態に処理機能を実装するために採用され得る、典型的なコンピュータシステム400を例示している。このタイプのコンピュータシステムは、例えば、クライアントおよびサーバにおいて使用され得る。当業者は、また、他のコンピュータシステムあるいはアーキテクチャを用いて、本発明の実装する方法を認識するであろう。コンピュータシステム400は、例えば、所与の用途または環境にとって望ましいか、あるいは適切であり得るような、デスクトップ、ラップトップまたはノートブックコンピュータ、携帯型コンピュータデバイス(PDA、セルフォン、パームトップ等)、メインフレーム、サーバ、クライアント、あるいは、任意の他のタイプの特別な目的のコンピュータデバイス、または汎用目的のコンピュータデバイスを示す。コンピュータシステム400は、プロセッサ404のような1つ以上のプロセッサを含み得る。プロセッサ404は、例えば、マイクロプロセッサ、マイクロコントローラあるいは、他の制御ロジックのような、汎用目的の処理エンジンまたは特別な目的の処理エンジンを用いて実装され得る。この例では、プロセッサ404は、バス402あるいは他の通信媒体に接続されている。
【0048】
コンピュータシステム400は、また、情報およびプロセッサ404によって実行される命令を格納する、ランダムアクセスメモリ(RAM)または他のダイナミックメモリのようなメインメモリ408を含み得る。メインメモリ408は、また、プロセッサ404によって実行されるべき命令の実行の間、一時的な変数あるいは他の中間的な情報を格納するために使用され得る。コンピュータシステム400は、同様に、読み取り専用メモリ(「ROM」)またはスタティック情報およびプロセッサ404のための命令を格納するために、バス402に結合された他のスタティック格納デバイスを含む。
【0049】
コンピュータシステム400は、また、情報格納システム410を含み得る、情報格納システム410は、例えば、メディアドライブ412および取り外し可能な格納媒体インターフェイス420を含み得る。メディアドライブ412は、固定のあるいは取り外し可能な格納媒体(例えば、ハードディスクドライブ、フロッピー(登録商標)ディスクドライブ、磁気テープドライブ、光学ディスクドライブ、CDまたはDVDドライブ(RまたはRW)、あるいは他の取り外し可能なメディアドライブまたは固定のメディアドライブ)を支持するドライブまたは他の機構を含み得る。格納媒体418は、例えば、ハードディスク、フロッピー(登録商標)ディスク、磁気テープ、光学ディスク、CDまたはDVD、あるいはメディアドライブ412によって読まれ、書き込める固定の媒体または取り外し可能な媒体を含み得る。これらの例が示すように、格納媒体418は、媒体内に特定のコンピュータソフトウェアまたはデータが格納されたコンピュータ読み取り可能な格納媒体を含み得る。
【0050】
代替の実施形態では、情報格納システム410は、他の同様な構成要素を含み得、コンピュータプログラムあるいは他の命令あるいはデータが、コンピュータシステム400の中にロードされることを可能にする。そのような構成要素は、例えば、プログラムカートリッジおよびカートリッジインターフェイス、取り外し可能メモリ(例えば、フラッシュメモリあるいは他の取り外し可能メモリモジュール)およびメモリスロットのような、取り外し可能な格納ユニット422およびインターフェイス420を含み得、ソフトウェアおよびデータが取り外し可能格納ユニット418からコンピュータシステム400に転送されることを可能にする。
【0051】
コンピュータシステム400は、また、通信インターフェイス424を含む。通信インターフェイス424は、ソフトウェアおよびデータがコンピュータシステム400と外部デバイスとの間で転送されることを可能にするように使用され得る。通信インターフェイス424の例は、モデム、ネットワークインターフェイス(イーサーネット、あるいは、他のN1Cカード)、通信ポート(例えば、USBポート)、PCMCIAスロットおよびカード等を含み得る。通信インターフェイス424を介するソフトウェアおよびデータ転送は、電子的、電磁的、光学的あるいは、通信インターフェイス424によって受信される互換性のある他の信号であり得る信号の形である。これらの信号は、チャネル428を介して通信インターフェイス424に提供される。このチャネル428は、信号を保持し得、無線媒体、ワイヤまたはケーブル、光ファイバ、あるいは他の通信媒体を用いて実装され得る。チャネルのいくつかの例は、電話回線、セルラーフォンリンク、RFリンク、ネットワークインターフェイス、ローカルネットワークまたは広域ネットワーク、および他の通信チャネルを含む。
【0052】
本文書において、用語「コンピュータプログラム製品」、「コンピュータ読み取り可能な格納媒体」および同様なものは、例えば、メモリ408、格納媒体418、あるいは格納ユニット422のような、物理的、具体的、媒体を一般に指すように使用され得る。これらのおよび他の形式のコンピュータ読み取り可能な格納媒体は、プロセッサ404によって使用されプロセッサに特定の動作を実行させる1つ以上の命令に含まれる。そのような命令は、通常「コンピュータプログラムコード」(コンピュータプログラムの形式でグループに分類されるか、または他のグループに分類される)と言われ、実行される場合、コンピュータシステム400が本発明の実施形態の特徴あるいは機能を実行する。コードは、プロセッサに特定の動作を直接実行させ、動作を実行するようにコンパイルされ、または、他のソフトウェア、ハードウェア、もしくはファームウェア要素(例えば、標準機能を実行するためのライブラリ)と動作するように組み合わされることに留意が必要である。
【0053】
要素がソフトウェアを使用して実装される実施形態では、ソフトウェアは、コンピュータ読み取り可能な格納媒体に格納され得、例えば、取り外し可能格納媒体418、ドライブ412、あるいは、通信インターフェイス424を用いて、コンピュータシステム400に、ロードされる。制御ロジック(この例では、ソフトウェア命令あるいはコンピュータプログラムコード)は、プロセッサ404によって実行される場合、プロセッサ404に本明細書に記載されたような本発明の機能を実行させる。
【0054】
上記の明確性のための記載が、異なる機能ユニットを参照して本発明の実施形態を記述してきたことが容易に理解されるであろう。しかしながら、異なる機能ユニットの間の機能の任意で適切な分散が、本発明から外れることなく使用され得ることは明白であろう。従って、本発明の具体的な機能ユニットへの言及は、厳密な論理あるいは物理的構造あるいは構成よりも、単に、記載された機能を提供するための適切な手段への参照として見られるべきである。
【0055】
本発明は、ハードウェア、ソフトウェア、ファームウェア、あるいは、それらの任意の組合せを含む任意の適切な形で実装され得る。本発明の異なる態様が、1つ以上のデータプロセッサあるいは、デジタル信号プロセッサ上で動作するコンピュータソフトウェアあるいはファームウェアとして少なくとも部分的に実装され得る。本発明の実施形態の要素および構成要素は、任意の適切な方法で物理的に、機能的に、あるいは論理的に実装され得る。実際、機能は、単一のユニットに、複数のユニットに、あるいは、他の機能ユニットの一部分として実装され得る。そのように、本発明は、単一のユニットに実装され得、あるいは、異なるユニットおよびプロセッサの間に、物理的におよび機能的に分散され得る。
【0056】
本発明がいくつかの実施形態に関連して記述されてきたが、本明細書に述べた特定の形に限定されることは意図していない。むしろ、本発明の態様は、特許請求の範囲によってのみ制限される。さらに、特徴は特定の実施形態に関して記述されたように見え得るが、当業者は、記載された実施形態の種々の特徴が本発明に従って組合され得ることを認識するであろう。さらに、実施形態に関して記述された本発明の態様は、発明として独立であり得る。
【0057】
さらに、個別に上げられた、複数の手段、要素あるいは方法のステップは、例えば、単一ユニットあるいはプロセッサによって実装され得る。さらに、有利に組み合わせた、異なる特許請求範囲の包含は、特徴の組合せが実際的でない、あるいは有利ではないことを示唆しない。また、特許請求項の1つのカテゴリの特徴の包含は、このカテゴリへの制限を意味しなく、特徴が、他の特許請求項のカテゴリに等しく、適切なように応用可能であり得る。
【0058】
さらに、種々の修正および代替が、本発明の精神および範囲から外れることなく、当業者によってなされ得ることが容易に理解されるであろう。本発明は、前述例示的詳細によって制限されるのではなく、特許請求の範囲に従って定められるべきものである。
【符号の説明】
【0059】
100 チャネル間バイアス較正受信器
101 衛星
102 GLONASS信号
104 高周波コンバイナ
129 較正信号
106 GLONASS RF回路
107 RF回路出力信号
108 アナログ−デジタル変換器(ADC)
109 ADC信号
【特許請求の範囲】
【請求項1】
ナビゲーション受信器のチャネル間バイアスを較正する装置であって、
基準信号を生成する基準信号回路と、
遅延基準信号を該基準信号と比較することによって、該ナビゲーション受信機のフロントエンド回路に関連するバイアス遅延を測定する測定ロジックであって、該遅延基準信号は、該フロントエンド回路を通る該基準信号の伝搬に基づいており、該フロントエンド回路は、該基準信号と受信衛星信号とを処理する、測定ロジックと、
チャネル間バイアスを低減するために補正信号を生成する較正ロジックと
を備えている、装置。
【請求項2】
前記補正信号は、前記受信衛星信号に適用される、請求項1に記載の装置。
【請求項3】
前記補正信号は、位相補正成分と距離補正成分とを含む、請求項1に記載の装置。
【請求項4】
前記基準信号は、前記受信衛星信号と同じ搬送波周波数を変調する、請求項1に記載の装置。
【請求項5】
前記基準信号は、異なるコード構造に起因して、前記受信衛星信号の擬似ランダムノイズ信号とは分離可能である、請求項1に記載の装置。
【請求項6】
前記フロントエンド回路は、前記受信衛星信号および前記基準信号を下方変換するダウンコンバータを含む、請求項1に記載の装置。
【請求項7】
ナビゲーション受信機のチャネル間バイアスを較正する方法であって、
基準信号を生成することと、
遅延基準信号を該基準信号と比較することによって、該ナビゲーション受信機のフロントエンド回路と関連するバイアス遅延を測定することであって、該遅延基準信号は、該ナビゲーション受信機の該フロントエンド回路を通る該基準信号の伝搬に基づき、該フロントエンド回路は該基準信号と受信衛星信号とに基づく、ことと、
チャネル間バイアスを低減するために補正信号を生成することと
を包含する、方法。
【請求項8】
前記補正信号は、前記受信衛星信号に適用される、請求項7に記載の方法。
【請求項9】
前記補正信号は、位相補正成分と距離補正成分とを含む、請求項7に記載の方法。
【請求項10】
前記基準信号は、前記受信衛星信号と同じ搬送波周波数を変調する、請求項7に記載の方法。
【請求項11】
前記基準信号は、異なるコード構造に起因して、前記受信衛星信号の擬似ランダムノイズ信号とは分離可能である、請求項7に記載の方法。
【請求項12】
前記フロントエンド回路は、前記受信衛星信号および前記基準信号を下方変換するダウンコンバータを含む、請求項7に記載の方法。
【請求項13】
ナビゲーション受信器のチャネル間バイアスを較正するプログラムコードを含むコンピュータ読み取り可能格納媒体であって、該プログラムコードは、
基準信号を生成することと、
遅延基準信号を該基準信号と比較することによって、該ナビゲーション受信機のフロントエンド回路と関連するバイアス遅延を測定することであって、該遅延基準信号は、該ナビゲーション受信器の該フロントエンド回路を通る該基準信号の伝搬に基づき、該フロントエンド回路は該基準信号と受信衛星信号とに基づく、ことと、
チャネル間バイアスを低減するために補正信号を生成することと
を行う、コンピュータ読み取り可能格納媒体。
【請求項14】
前記補正信号は、前記受信衛星信号に適用される、請求項13に記載のコンピュータ読み取り可能格納媒体。
【請求項15】
前記補正信号は、位相補正成分と距離補正成分とを含む、請求項13に記載のコンピュータ読み取り可能格納媒体。
【請求項16】
前記基準信号は、前記受信衛星信号と同じ搬送波周波数を変調する、請求項13に記載のコンピュータ読み取り可能格納媒体。
【請求項17】
前記基準信号は、異なるコード構造に起因して、前記受信衛星信号の擬似ランダムノイズ信号とは分離可能である、請求項13に記載のコンピュータ読み取り可能格納媒体。
【請求項18】
前記フロントエンド回路は、前記受信衛星信号および前記基準信号を下方変換するダウンコンバータを含む、請求項13に記載のコンピュータ読み取り可能格納媒体。
【請求項1】
ナビゲーション受信器のチャネル間バイアスを較正する装置であって、
基準信号を生成する基準信号回路と、
遅延基準信号を該基準信号と比較することによって、該ナビゲーション受信機のフロントエンド回路に関連するバイアス遅延を測定する測定ロジックであって、該遅延基準信号は、該フロントエンド回路を通る該基準信号の伝搬に基づいており、該フロントエンド回路は、該基準信号と受信衛星信号とを処理する、測定ロジックと、
チャネル間バイアスを低減するために補正信号を生成する較正ロジックと
を備えている、装置。
【請求項2】
前記補正信号は、前記受信衛星信号に適用される、請求項1に記載の装置。
【請求項3】
前記補正信号は、位相補正成分と距離補正成分とを含む、請求項1に記載の装置。
【請求項4】
前記基準信号は、前記受信衛星信号と同じ搬送波周波数を変調する、請求項1に記載の装置。
【請求項5】
前記基準信号は、異なるコード構造に起因して、前記受信衛星信号の擬似ランダムノイズ信号とは分離可能である、請求項1に記載の装置。
【請求項6】
前記フロントエンド回路は、前記受信衛星信号および前記基準信号を下方変換するダウンコンバータを含む、請求項1に記載の装置。
【請求項7】
ナビゲーション受信機のチャネル間バイアスを較正する方法であって、
基準信号を生成することと、
遅延基準信号を該基準信号と比較することによって、該ナビゲーション受信機のフロントエンド回路と関連するバイアス遅延を測定することであって、該遅延基準信号は、該ナビゲーション受信機の該フロントエンド回路を通る該基準信号の伝搬に基づき、該フロントエンド回路は該基準信号と受信衛星信号とに基づく、ことと、
チャネル間バイアスを低減するために補正信号を生成することと
を包含する、方法。
【請求項8】
前記補正信号は、前記受信衛星信号に適用される、請求項7に記載の方法。
【請求項9】
前記補正信号は、位相補正成分と距離補正成分とを含む、請求項7に記載の方法。
【請求項10】
前記基準信号は、前記受信衛星信号と同じ搬送波周波数を変調する、請求項7に記載の方法。
【請求項11】
前記基準信号は、異なるコード構造に起因して、前記受信衛星信号の擬似ランダムノイズ信号とは分離可能である、請求項7に記載の方法。
【請求項12】
前記フロントエンド回路は、前記受信衛星信号および前記基準信号を下方変換するダウンコンバータを含む、請求項7に記載の方法。
【請求項13】
ナビゲーション受信器のチャネル間バイアスを較正するプログラムコードを含むコンピュータ読み取り可能格納媒体であって、該プログラムコードは、
基準信号を生成することと、
遅延基準信号を該基準信号と比較することによって、該ナビゲーション受信機のフロントエンド回路と関連するバイアス遅延を測定することであって、該遅延基準信号は、該ナビゲーション受信器の該フロントエンド回路を通る該基準信号の伝搬に基づき、該フロントエンド回路は該基準信号と受信衛星信号とに基づく、ことと、
チャネル間バイアスを低減するために補正信号を生成することと
を行う、コンピュータ読み取り可能格納媒体。
【請求項14】
前記補正信号は、前記受信衛星信号に適用される、請求項13に記載のコンピュータ読み取り可能格納媒体。
【請求項15】
前記補正信号は、位相補正成分と距離補正成分とを含む、請求項13に記載のコンピュータ読み取り可能格納媒体。
【請求項16】
前記基準信号は、前記受信衛星信号と同じ搬送波周波数を変調する、請求項13に記載のコンピュータ読み取り可能格納媒体。
【請求項17】
前記基準信号は、異なるコード構造に起因して、前記受信衛星信号の擬似ランダムノイズ信号とは分離可能である、請求項13に記載のコンピュータ読み取り可能格納媒体。
【請求項18】
前記フロントエンド回路は、前記受信衛星信号および前記基準信号を下方変換するダウンコンバータを含む、請求項13に記載のコンピュータ読み取り可能格納媒体。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−156693(P2010−156693A)
【公開日】平成22年7月15日(2010.7.15)
【国際特許分類】
【出願番号】特願2009−296098(P2009−296098)
【出願日】平成21年12月25日(2009.12.25)
【出願人】(510001320)ジャバド ジーエヌエスエス, インコーポレイテッド (8)
【Fターム(参考)】
【公開日】平成22年7月15日(2010.7.15)
【国際特許分類】
【出願日】平成21年12月25日(2009.12.25)
【出願人】(510001320)ジャバド ジーエヌエスエス, インコーポレイテッド (8)
【Fターム(参考)】
[ Back to top ]