
ナビゲーション装置、および、ナビゲーション装置における推奨経路表示方法
【課題】推奨経路上に自身の推奨経路と交差する「交差地点」が存在する場合であっても、「交差地点」から先の進むべき進行方向について、ユーザの把握を容易にする技術を提供する。
【課題を解決するための手段】
本発明のナビゲーション装置100は、表示処理部103を介して、推奨経路を地図とともに表示し、移動体の位置を示す移動体マークを推奨経路に沿って移動させることにより経路誘導する経路誘導部105と、推奨経路が自身の推奨経路と交差する「交差地点」を特定する交差地点特定部106と、移動体マークが「交差地点」を通過する前に、「交差地点」から進むべき進行方向を、表示処理部103を介して表示する進行方向特定部107と、を備える。
【課題を解決するための手段】
本発明のナビゲーション装置100は、表示処理部103を介して、推奨経路を地図とともに表示し、移動体の位置を示す移動体マークを推奨経路に沿って移動させることにより経路誘導する経路誘導部105と、推奨経路が自身の推奨経路と交差する「交差地点」を特定する交差地点特定部106と、移動体マークが「交差地点」を通過する前に、「交差地点」から進むべき進行方向を、表示処理部103を介して表示する進行方向特定部107と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置、および、ナビゲーション装置における推奨経路表示方法に関する。
【背景技術】
【0002】
一般的に、ナビゲーション装置は、出発地から目的地までの推奨経路を地図上に表示し、移動体の位置を示す移動体マークを推奨経路に沿って移動させて、経路誘導を行う。近年のナビゲーション装置のなかには、特定の地点を経由して目的地に至るような推奨経路を表示して、経路誘導を行うものもある。
【0003】
例えば、特許文献1には、ユーザに設定された特定の地点を経由する推奨経路をディスプレイに表示して、経路誘導を行うナビゲーション装置について記載されている。
【特許文献1】特開2003−214880号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特定の地点(経由地点)を経由する設定がされていると、その設定に基づいて探索した推奨経路が、1度通過した地点を再度通過する経路となっている場合がある。ここで、再度通過する地点は、推奨経路が自身の推奨経路と交差している地点であるため、以下では、「交差地点」とよぶ。
【0005】
そして、一般的に、地図上に表示する推奨経路は、出発地から目的地まで、同色、同形状の線などで強調されるため、推奨経路上に、上述した「交差地点」が存在すると、ユーザにとっては、推奨経路が分岐しているように見える。そのため、推奨経路に沿って移動させている移動体マークが「交差地点」を通過する手前で、ユーザが「交差地点」から先の進むべき進行方向を把握することは難しい。
【0006】
また、経由地点が設定されていなくても、推奨経路に「交差地点」が存在する場合もあり、そのような場合にも同様に、ユーザにとっては、「交差地点」から先の進むべき進行方向がわかりにくい。
【0007】
本発明は、ナビゲーション装置において、推奨経路上に、上述した「交差地点」が存在する場合であっても、「交差地点」から先の進むべき進行方向について、ユーザの把握を容易にする技術を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するための本願発明のナビゲーション装置は、推奨経路を表示する推奨経路表示手段と、前記推奨経路と、前記推奨経路と、が交差する交差地点を特定する交差地点特定手段と、移動体が前記交差地点特定手段により特定された交差地点に、所定距離近づいたかどうかを判断する判断手段と、前記判断手段により移動体と、前記交差地点と、の距離が、所定距離近づいたと判断されると、移動体の現在位置と、進行方向と、から、前記交差地点に進むべき進行方向を表示する進行方向表示手段と、を備える。
【発明の効果】
【0009】
本発明のナビゲーション装置によれば、推奨経路上に、上述した「交差地点」が存在する場合であっても、「交差地点」から先において進むべき進行方向を、ユーザが容易に把握することができるようになる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施形態の一例について図面を参照して説明する。
【0011】
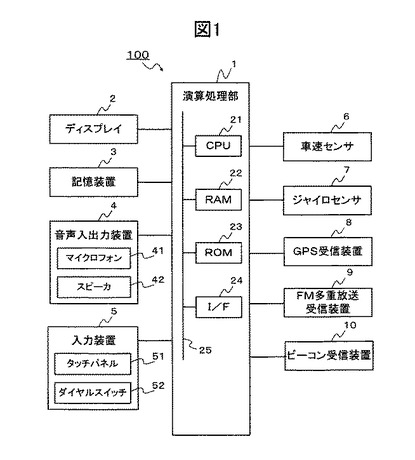
図1は、本発明の一実施形態が適用されたナビゲーション装置100の概略構成図である。図示するように、ナビゲーション装置100は、演算処理部1と、ディスプレイ2と、記憶装置3と、音声入出力装置4(マイクロフォン41、スピーカ42)と、入力装置5と、車速センサ6と、ジャイロセンサ7と、GPS受信装置8と、FM多重放送受信装置9と、ビーコン受信装置10と、を備えている。なお、ナビゲーション装置100は、車両に載置されている車載用ナビゲーション装置としてもよいし、携帯電話やPDAなどの携帯端末としてもよい。
【0012】
演算処理部1は、様々な処理を行う中心的ユニットである。例えば、演算処理部1は、数値演算及び各デバイスを制御するといった様々な処理を実行するCPU(Central Processing Unit)21と、記憶装置3から読み出した地図データ、演算データなどを格納するRAM(Random Access Memory)22と、プログラムやデータを格納するROM(Read Only Memory)23と、各種ハードウェアを演算処理部1に接続するためのI/F(インタフェース)24と、を有する。そして、演算処理部1は、各デバイスをバス25で相互に接続した構成からなる。そして、後述する各機能部(101〜107)は、CPU21がRAM22などのメモリに読み出したプログラムを実行することで実現される。
【0013】
例えば、演算処理部1は、各種センサ(6、7)やGPS受信装置8から出力される情報を基にして現在地を検出する。また、得られた現在地情報に基づいて、表示に必要な地図データを記憶装置3から読み出す。また、読み出した地図データをグラフィック展開し、そこに現在地を示すマーク(或いは、移動体の位置を示す移動体マーク)を重ねてディスプレイ2に表示する。また、記憶装置3に記憶されている地図データを用いて、ユーザから指示された出発地(現在地)と目的地とを結ぶ最適な経路(推奨経路)を探索する。また、音声入出力装置4のスピーカ42やディスプレイ2を用いてユーザを誘導する。
【0014】
ディスプレイ2は、演算処理部1で生成されたグラフィックス情報を表示するユニットである。ディスプレイ2は、液晶ディスプレイや有機EL(Electro-Luminescence)ディスプレイなどで構成される。
【0015】
記憶装置3は、CD−ROMやDVD−ROMやHDDやICカードといった記憶媒体で構成される。この記憶媒体には、例えば、地図データ310、音声データ、動画データ、等が記憶されている。
【0016】
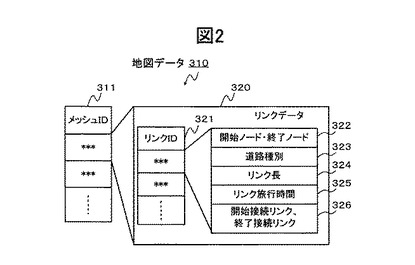
図2は、地図データ310の概略データ構造を示す図である。地図データ310は、地図上の区画された領域であるメッシュの識別コード(メッシュID)311ごとに、そのメッシュ領域に含まれている道路を構成する各リンクのリンクデータ320を含んでいる。
【0017】
リンクデータ320は、リンクの識別コード(リンクID)321ごとに、リンクを構成する2つのノード(開始ノード、終了ノード)の座標情報322、リンクを含む道路の種別情報323、リンクの長さを示すリンク長情報324、リンク旅行時間325、2つのノードにそれぞれ接続するリンクの識別コード(接続リンクID)326、などを含んでいる。なお、ここでは、リンクを構成する2つのノードについて開始ノードと終了ノードとを区別することで、道路の上り方向と下り方向とを、それぞれ別のリンクとして管理することができる。
【0018】
図1に戻り、音声入出力装置4は、音声入力装置としてマイクロフォン41と、音声出力装置としてスピーカ42と、を備える。マイクロフォン41は、ユーザやその他の搭乗者から発された音声などの、ナビゲーション装置100の外部の音声を取得する。スピーカ42は、演算処理部1で生成された音声信号を出力する。これらのマイクロフォン41とスピーカ42は、車両の所定の部位に、別個に配置されている。
【0019】
入力装置5は、ユーザからの指示を受け付けるユニットである。入力装置5は、タッチパネル51と、ダイヤルスイッチ52と、その他のハードスイッチ(図示せず)であるスクロールキー、縮尺変更キーなどで構成される。
【0020】
タッチパネル51は、ディスプレイ2の表示面に貼られた透過性のある操作パネルである。タッチパネル51は、ディスプレイ2に表示された画像のXY座標と対応したタッチ位置を特定し、タッチ位置を座標に変換して出力する。タッチパネル51は、感圧式または静電式の入力検出素子などにより構成される。
【0021】
ダイヤルスイッチ52は、時計回り及び反時計回りに回転可能に構成され、所定の角度の回転ごとにパルス信号を発生し、演算処理部1に出力する。演算処理部1では、パルス信号の数から、ダイヤルスイッチ52の回転角度を求める。
【0022】
車速センサ6、ジャイロセンサ7、及び、GPS受信装置8は、移動体(ナビゲーション装置100)の現在位置(自車位置)などを検出するために使用される。車速センサ6は、車速を算出するために用いる車速データを出力するセンサである。ジャイロセンサ7は、光ファイバジャイロや振動ジャイロ等で構成され、移動体の回転による角速度を検出するものである。GPS受信装置8は、GPS衛星からの信号を受信し、移動体とGPS衛星間の距離とその距離の変化率を3個以上の衛星に対して測定することで、移動体の現在位置や進行速度を測定する。
【0023】
FM多重放送受信装置9は、FM多重放送局から送られてくるFM多重放送信号を受信する。FM多重放送には、VICS(Vehicle Information Communication System:登録商標)情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報などのFM多重一般情報としてラジオ局が提供する文字情報などがある。
【0024】
ビーコン受信装置10は、ビーコンから送られてくる渋滞情報、規制情報、SA/PA情報、駐車場情報などを受信する。
【0025】
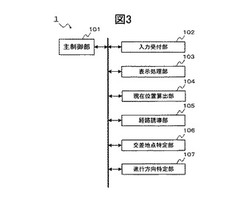
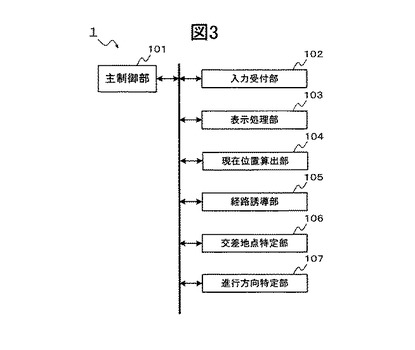
図3は、演算処理部1の機能ブロック図である。図示するように、演算処理部1は、主制御部101と、入力受付部102と、表示処理部103と、現在位置算出部104と、経路誘導部105と、交差地点特定部106と、進行方向特定部107と、を有する。
【0026】
主制御部101は、演算処理部1の各部を統括して制御する処理を行う。
【0027】
入力受付部102は、入力装置5に入力されたユーザからの要求を受け付け、その要求内容を解析する。入力受付部102は、解析結果に応じたデータを主制御部101に通知する。例えば、入力受付部102は、ナビゲーション装置100に、電源の供給、切断を指示する要求、等を受け付け、主制御部101に通知する。また、入力受付部102は、ナビゲーション装置100が有する各種機能の設定に関する入力データを受け付け、主制御部101に通知する。
【0028】
表示処理部103は、ディスプレイ2に、地図や、施設を示す施設アイコン、等を表示させる。具体的には、表示処理部103は、ディスプレイ2に表示させるための描画コマンドを生成して通知する。なお、表示処理部103は、地図をディスプレイ2に表示させる際には、表示が要求された領域(例えば、ナビゲーション装置100の現在位置付近の領域)にある地図データを記憶装置3から抽出し、指定された縮尺、描画方式で、道路、その他の地図構造物、現在位置、目的地、等を描画するように地図描画コマンドを生成する。また、表示処理部103は、ディスプレイ2に表示させた地図上に、移動体(自車両)の位置を示す移動体マーク(カーマーク)や各種設定画面などが表示させる。
【0029】
現在位置算出部104は、ナビゲーション装置100の現在位置を算出する。具体的には、現在位置算出部104は、車速センサ6で出力された車速データに基づいて算出した移動体(ナビゲーション装置100)の進行速度、および、ジャイロセンサ7で検出した角速度データを各々積分した結果得られる距離データおよび角度データを用い、そのデータを時間軸で積分していくことにより、初期位置(X,Y)から移動後(自車走行後)の位置(X’,Y’)を定期的に演算する。また、演算結果を用いて、マップマッチ処理することにより、形状の相関が最も高い道路(リンク)上に現在位置を合わせ込む。また、定期的にGPS受信装置8の出力データを用いて現在位置を修正する。なお、移動体(ナビゲーション装置100)が停止しているときには、GPS受信装置8の出力データだけを用いて現在位置を求めてもよい。
【0030】
経路誘導部105は、ダイクストラ法等を用いて、指定された2地点(現在地、目的地)間を結ぶ経路のコスト(例えば、総距離や総旅行時間)が最小となる経路を探索し、探索した経路(推奨経路)を用いて経路誘導を行う。このとき、経路誘導部105は、探索した推奨経路を構成する各リンクの識別コード(リンクID)321を、それぞれ対応付けてRAM22等のメモリに記憶しておく。また、経路誘導部105は、推奨経路の情報と、現在位置とを比較し、主要な交差点(上述した「交差地点」に該当する場合は除く)等を通過する前に直進すべきか、右左折すべきかを、ディスプレイ2に表示させるとともに、音声入出力装置4のスピーカ42を用いて音声でユーザに知らせる。また、経路誘導部105は、表示処理部103を介して、ディスプレイ2に表示された地図の範囲に含まれている推奨経路を表示(強調表示)する。このとき、経路誘導部105は、移動体(車両)の現在位置を示す移動体マーク(カーマーク)を推奨経路上(例えば、画面中心)に表示する。
【0031】
また、経路誘導部105は、ユーザの指示に従って、地図を推奨経路に沿ってスクロールする処理を行ってもよい。この場合には、経路誘導部105は、移動体の現在位置ではなく、地図上における移動体の仮想的な位置を示す移動体マークを、推奨経路上に表示する。
【0032】
交差地点特定部106は、経路誘導部105が探索した推奨経路が、自身の推奨経路と交差する「交差地点」を特定する処理を行う。交差地点特定部106は、例えば、以下に示す2種類の方法により、「交差地点」を特定する。
【0033】
<第1の特定方法>
第1の特定方法により、「交差地点」を特定する場合、交差地点特定部106は、RAM22等のメモリから、推奨経路を構成する全リンクのリンクID321を読み出す。そして、読み出した全リンクから2つのリンクを選択し、選択した両リンクが交差しているか否か(「交差地点」が存在するか否か)について判断する。ここで、交差地点特定部106は、交差しているか否かの判断を、全リンクから2つのリンクを選択し得る全ての組み合わせに対して行う。
【0034】
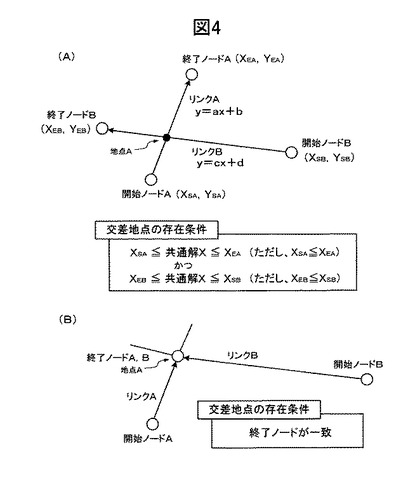
図4(A)は、第1の特定方法において、選択した両リンクが交差しているか否かを判断する処理を説明するための説明図である。図示するように、交差地点特定部106は、選択した両リンク(リンクA、リンクB)のそれぞれのリンクについて、開始ノードA、Bと、終了ノードA、Bと、を特定する。具体的には、交差地点特定部106は、両リンクのリンクID321に対応する座標情報322を参照して、リンクAの開始ノードAの座標(XSA,YSA)および終了ノードAの座標(XEA,YEA)と、リンクBの開始ノードBの座標(XSB,YSB)および終了ノードBの座標(XEB,YEB)を特定する。そして、交差地点特定部106は、リンクAの開始ノードAと終了ノードAを結ぶ直線を示す数式(例えば、「y=ax+b」)と、リンクBの開始ノードBと終了ノードBとを結ぶ直線を示す数式(例えば、「y=cx+d」)と、を求める。そして、交差地点特定部106は、求めた両リンクの直線が、両リンクの範囲において共通解を有するか否かを判別して、選択した両リンクが交差しているか否かを判断する。より具体的には、交差地点特定部106は、求めた両リンクの直線式を連立して、図示するような存在条件(XSA≦共通解のX座標≦XEA、かつ、XEB≦共通解のX座標≦XSB)を満たす共通解が存在する場合に、選択した両リンクが交差していると判定し、存在条件を満たす共通解が存在しない場合に、選択した両リンクは交差していないと判定する。
【0035】
交差地点特定部106は、選択した両リンクが交差していると判定した場合においては、両リンクが交差している「交差地点」(図示する例では、地点A)を特定するための情報をRAM22等のメモリに記憶する。具体的には、例えば、交差地点特定部106は、「交差地点」が存在すると判定した両リンクの直線式を連立して求めた共通解(X座標,Y座標)を、「交差地点」を特定する情報として記憶する。これとともに、交差地点特定部106は、両リンクのリンクID321を、「交差地点」を特定する情報に対応付けて記憶する。
【0036】
<第2の特定方法>
次に、第2の特定方法により、交差地点特定部106が「交差地点」を特定する処理について説明する。交差地点特定部106は、第1の特定方法と同様に、RAM22等のメモリから、推奨経路を構成する全リンクのリンクID321を読み出す。そして、読み出した全リンクから2つのリンクを選択し、選択した両リンクに「交差地点」が存在するか否かについて判断する。ここで、交差地点特定部106は、「交差地点」が存在するか否かの判断を、全リンクから2つのリンクを選択し得る全ての組み合わせに対して行う。
【0037】
図4(B)は、第2の特定方法において、選択した両リンクに「交差地点」が存在するか否かを判断する処理を説明するための説明図である。図示するように、交差地点特定部106は、選択した両リンク(リンクA、リンクB)のそれぞれのリンクについて、終了ノードA、Bを特定する。具体的には、交差地点特定部106は、両リンクのリンクID321に対応する座標情報322を参照して、リンクAの終了ノードAの座標(XEA,YEA)と、リンクBの終了ノードBの座標(XEB,YEB)を特定する。そして、交差地点特定部106は、リンクAの終了ノードAと、リンクBの終了ノードBと、が一致、或いは、ほぼ一致(所定の距離内に存在)するか否かを判別して、選択した両リンクに「交差地点」が存在するか否かを判断する。より具体的には、交差地点特定部106は、リンクAの終了ノードAと、リンクBの終了ノードBと、が一致、或いは、ほぼ一致する場合には、選択した両リンクに「交差地点」が存在すると判定し、それ以外の場合には、選択した両リンクに「交差地点」は存在しないと判定する。
【0038】
交差地点特定部106は、選択した両リンクに「交差地点」が存在していると判定した場合においては、両リンクが交差している「交差地点」(図示する例では、地点A)を特定するための情報をRAM22等のメモリに記憶する。例えば、交差地点特定部106は、「交差地点」が存在すると判定した両リンクの終了ノードの座標(座標情報322の終了ノード)を、「交差地点」を特定する情報として記憶する。
【0039】
以上のように、交差地点特定部106は、第1の特定方法、第2の特定方法、或いは、第1の特定方法と第2の特定方法の併用、によって、推奨経路上に存在する「交差地点」を特定する。なお、本発明は、第1の特定方法、第2の特定方法に限定するものではなく、交差地点特定部106は、それ以外の方法を用いて、「交差地点」を特定してもよい。
【0040】
図3に戻り、進行方向特定部107は、交差地点特定部106が特定した「交差地点」から先の進行方向についてユーザが容易にわかるように、「交差地点」から先の進むべき進行方向を示すアイコンを、表示処理部103を介してディスプレイ2に表示する。具体的には、進行方向特定部107は、経路誘導部105によって推奨経路に沿って移動する移動体マークが、交差地点特定部106により特定された「交差地点」を通過する前に、「交差地点」から先の進行すべき進行方向(アイコン)を表示する。
【0041】
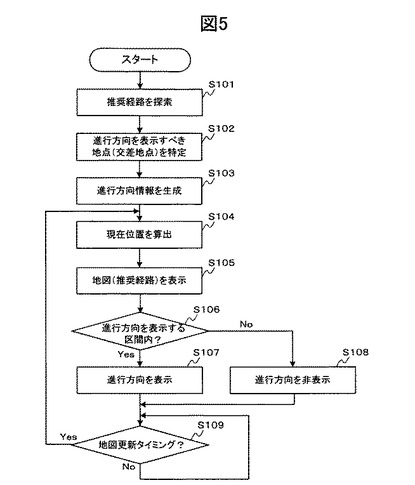
次に、上記構成からなるナビゲーション装置100の特徴的な動作について説明する。図5は、ナビゲーション装置100の演算処理部1が行う進行方向表示処理を示すフローチャートである。
【0042】
演算処理部1の主制御部101は、入力受付部102を介して推奨経路を表示する処理(例えば、経路誘導処理や、推奨経路に沿って地図をスクロールさせる処理、など)を開始する指示を受け付けると、進行方向表示処理を開始する。具体的には、例えば、表示処理部103が推奨経路を表示する処理の開始を指示するためのボタンを、メニュー画面(図示せず)に表示しておき、そのボタンにタッチする操作がタッチパネル51になされた場合に、進行方向表示処理を開始する。
【0043】
進行方向表示処理を開始後、経路誘導部105は、推奨経路を探索する(ステップS101)。具体的には、経路誘導部105は、入力受付部102を介して受け付けた条件(例えば、経由地の設定、など)を満たし、かつ、2地点(現在地、目的地)間を結ぶ経路、のコストが最小となる推奨経路を探索する。
【0044】
そして、経路誘導部105は、探索した推奨経路を構成する全リンクを特定するリンクID321を、RAM22に記憶する。
【0045】
続いて、交差地点特定部106は、ステップS101で探索した推奨経路において、上述した「交差地点」を特定する処理を行う(ステップS102)。具体的には、交差地点特定部106は、ステップS101でRAM22に記憶しておいたリンクID321(推奨経路を構成する全リンク)を読み出し、上述した第1の特定方向、或いは、第2の特定方法により、「交差地点」を特定する。そして、交差地点特定部106は、ステップS102において特定した「交差地点」について、「交差地点」を特定する情報(例えば、「交差地点」の座標など)を、RAM22に記憶する。また、交差地点特定部106は、「交差地点」で交差している両リンク(リンクA、リンクB)のリンクID321を、「交差地点」を特定する情報に対応付けてRAM22に記憶する。
【0046】
ただし、ステップS102において、「交差地点」が1つも特定できない場合には、交差地点特定部106は、推奨経路に「交差地点」が1つも存在しないことを示す情報を、RAM22に記憶する。
【0047】
また、ステップS102において、複数の「交差地点」を特定した場合には、交差地点特定部106は、それぞれの「交差地点」について、「交差地点」を特定する情報、および、交差している両リンクを特定する情報、をRAM22に記憶する。
【0048】
次に、進行方向特定部107は、移動体マークが「交差地点」を通過した後に進むべき進行方向を求めて、求めた進行方向を地図上に表示するために必要な進行方向特定情報400を生成する(ステップS103)。
【0049】
具体的には、ステップS102において交差地点特定部106が第1の特定方法で、「交差地点」を特定している場合、進行方向特定部107は、まず、「交差地点」で交差しているリンク(リンクA、リンクB)のリンクID321を、RAM22から読み出す。進行方向処理部107は、読み出したリンクを、移動体マークが「交差地点」を通過した後に移動するリンクとして特定し、特定したリンクのリンクID321に対応付けられている座標情報322(開始ノード及び終了ノード)を、地図データ310から読み出す。
【0050】
一方、ステップS102において交差地点特定部106が第2の特定方法で、「交差地点」を特定している場合、進行方向特定部107は、まず、「交差地点」を特定する情報(終了ノードの座標)を開始ノードとしているリンク(リンクID321)について、RAM22から検索する。進行方向処理部107は、検索したリンクを、移動体マークが「交差地点」を通過した後に移動するリンクとして特定し、特定したリンクのリンクID321に対応付けられている座標情報322(開始ノード及び終了ノード)を、地図データ310から読み出す。
【0051】
そして、どちらの特定方法(第1の特定方法、第2の特定方法)で「交差地点」を特定した場合においても、進行方向処理部107は、読み出した開始ノードから見た終了ノードの方向(方位)を求める。ここで、進行方向処理部107が求める方向(方位)は、例えば、開始ノードを始点とし、終了ノードを終点とする方位ベクトルでよい。そして、進行方向特定部107は、求めた方向(方位)を、移動体マークが「交差地点」を通過した後に進むべき進行方向450として、RAM22(進行方向特定情報400)に記憶する。なお、「交差地点」は、当然ながら複数のリンクが交差している地点であるため、1つの「交差地点」に対して、必ず複数の進行方向450が求まる。従って、進行方向特定部107は、求めた複数の進行方向450を、それぞれ、RAM22(進行方向特定情報400)に記憶する。また、進行方向特定部107は、求めた進行方向450と、「交差地点」を特定する情報と、をRAM22(進行方向特定情報400)に対応付けて記憶する。
【0052】
さらに、進行方向特定部107は、求めた進行方向450(アイコン)を地図上に表示すべき期間に、移動体マーク(カーマーク)が推奨経路上に位置している区間を特定する表示区間440を求める。なお、後述するステップS107において、ステップS103で求めた表示区間440に移動体マーク(カーマーク)が位置している間、進行方向450(アイコン)は、地図上に表示される。
【0053】
表示区間440を求める方法は任意であるが、例えば、進行方向特定部107は、交差地点410から所定の距離(例えば、300m)だけ、手前方向(進行方向450と逆方向)に離れた推奨経路上の位置と、交差地点410と、の間の区間の推奨経路を、表示区間440として求める。そして、進行方向特定部107は、求めた表示区間440を、進行方向特定情報400に記憶されている交差地点410及び進行方向450に対応付けて、RAM22(進行方向特定情報400)に記憶する。
【0054】
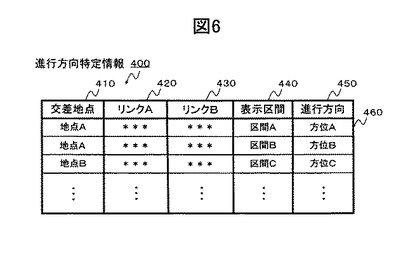
図6は、進行方向特定部107が求めた表示区間440及び進行方向450と、「交差地点」を特定する情報(交差地点410)と、を記憶する進行方向特定情報400の概略データ構造を示す図である。進行方向特定情報400は、交差地点410及び進行方向450の組み合わせごとのレコード460からなる。各レコード460には、交差地点410と、リンクAのリンクID420と、リンクBのリンクID430と、の表示区間440と、進行方向450と、が対応付けて格納される。
【0055】
交差地点410は、ステップS102において交差地点特定部106がRAM22に記憶した「交差地点」を特定する情報であり、例えば、上述した第1の特定方法を利用して求めた共通解(X座標,Y座標)データでもよいし、上述した第2の特定方法を利用して特定した座標データ(終了ノード)でもよい。
【0056】
リンクAのリンクID420は、「交差地点」で交差している両リンクのうち、一方のリンクAを特定する情報であり、例えば、リンクAのリンクID321に対応するデータとする。
【0057】
リンクBのリンクID430は、「交差地点」で交差している両リンクのうち、リンクAではない方のリンクBを特定する情報であり、例えば、リンクBのリンクID321に対応するデータとする。
【0058】
表示区間440は、推奨経路上で進行方向(アイコン)を表示する区間(或いは領域でもよい)を特定するデータであり、例えば、進行方向(アイコン)の表示開始座標と、表示終了座標である。ここで、表示開始座標は、例えば、「交差地点」から所定の距離(例えば、300m)だけ、手前方向(進行方向と逆方向)に離れた推奨経路上の位置を示す座標とし、表示終了座標は、例えば、「交差地点」の位置を示す座標とする。
【0059】
進行方向450は、移動体マークが「交差地点」を通過した後に進むべき進行方向を特定するデータであり、例えば、進行方向特定部107が求めた進行方向(方位ベクトルなど)である。
【0060】
図5に戻り、処理をステップS104に移行すると、現在位置算出部104は、ナビゲーション装置100の現在位置を算出する(ステップS104)。
【0061】
続いて、表示処理部103は、ディスプレイ2に、ステップS104で算出した現在位置付近の領域にある地図を表示する。そして、経路誘導部105は、ステップS101で探索した推奨経路を構成するリンクのうち、ディスプレイ2に表示された地図の範囲に含まれているリンク(経路)を表示(強調表示)する(ステップS105)。このとき、経路誘導部105は、移動体(車両)の現在位置を示す移動体マーク(カーマーク)を推奨経路上(例えば、画面中心)に表示する。
【0062】
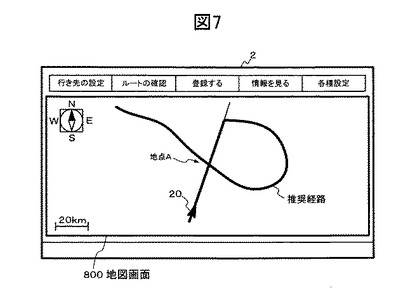
図7は、ステップS105において、推奨経路を地図上に表示したときの画面表示例を示す図である。図示するように、地図画面800には、移動体の現在位置付近の地図と、移動体の位置を示す移動体マーク20と、推奨経路(太線)と、が同一地図上に表示される。
【0063】
この時点(移動体と地点Aが遠距離)では、ドライバー(ユーザ)は、推奨経路が自身の推奨経路と交差する地点A(「交差地点」)において、地点Aを通過した後に、どちらの方向に進むべきか判断できない。
【0064】
図5に戻り、処理がステップS106に移行すると、進行方向特定部107は、移動体(移動体マーク)が、上記の「交差地点(地点A)」に所定距離近づいたかどうか判断する(ステップS106)。例えば、進行方向特定部107は、移動体(移動体マーク)が、ステップS103で求めた表示区間440内に位置しているか否か判別すればよい。具体的には、進行方向特定部107は、RAM22(進行方向特定情報400)にアクセスして、ステップS104で算出された現在位置を包含する表示区間440を検索する。検索した結果、包含する表示区間440がある場合には、処理をステップS107に移行する。一方、包含する表示区間440がない場合には、処理をステップS108に移行する。また、推奨経路上に「交差地点」が1つも存在しないことを示す情報がRAM22に記憶されている場合にも、処理をステップS108に移行する。
【0065】
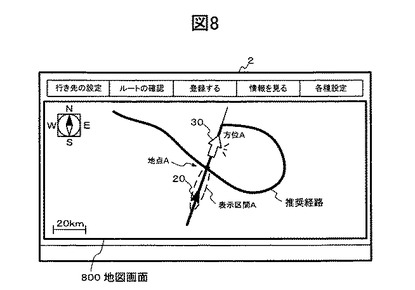
ステップS107に処理が移行すると、進行方向特定部107は、移動体マークが「交差地点」を通過した後に進むべき進行方向(アイコン)を地図上に表示する(ステップS107)。具体的には、進行方向特定部107は、RAM22(進行方向特定情報400)にアクセスして、ステップS106で検索した表示区間440(例えば、表示区間A)に対応付けて記憶されている進行方向450(例えば、方位A)を特定する。そして、進行方向特定部107は、特定した進行方向450を示す進行方向アイコン30を、地図上に表示する。ここで、進行方向特定部107は、矢印を象った進行方向アイコン30をROM23等のメモリに予め格納しておき、メモリから読み出した進行方向アイコン30を、特定した進行方向450に回転させて表示(点滅表示)する。なお、進行方向450ごとの進行方向アイコン30を予めメモリに格納しておき、特定した進行方向450に対応する進行方向アイコン30をメモリから読み出して、地図上に表示するようにしてもよい。
【0066】
図8は、ステップS107において、移動体マークが「交差地点」を通過した後に進むべき進行方向(アイコン)を地図上に表示したときの画面表示例を示す図である。図示するように、進行方向特定部107は、図7で示した地図画面800に、進行方向アイコン30を重ねて表示する。ここで表示する進行方向アイコン30は、ドライバー(ユーザ)の注意を引くために、点滅させて表示してもよいし、ドライバー(ユーザ)の注意を引く色で表示してもよい。また、進行方向特定部107は、進行方向アイコン30を、例えば、図示するような位置(「交差地点」付近、かつ、推奨経路上)に表示するようにする。
【0067】
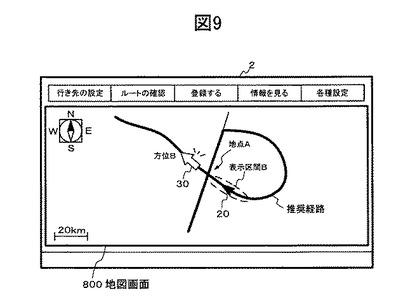
また、図9は、ステップS107において、移動体マーク20が、1度通過した地点A(「交差地点」)を再度通過する場合に、再度通過した後に進むべき進行方向(アイコン)を地図上に表示したときの画面表示例を示す図である。
【0068】
このとき、進行方向特定部107は、上述した処理と同様に、RAM22(進行方向特定情報400)にアクセスして、ステップS106で検索した表示区間440(例えば、表示区間B)に対応付けて記憶されている進行方向450(例えば、方位B)を特定する。そして、進行方向特定部107は、特定した進行方向450を示す進行方向アイコン30を、地図上に表示する。
【0069】
図5に戻り、処理がステップS108に移行すると、進行方向特定部107は、「交差地点」から先において進むべき進行方向(進行方向アイコン30)を地図上に表示しないようにする(ステップS108)。例えば、移動体マーク20が「交差地点」を通過した場合に、進むべき進行方向(進行方向アイコン30)を地図上に表示しないようにする。また、ステップS108に移行する前に、進むべき進行方向(進行方向アイコン30)が表示されていない場合は、進行方向特定部107は、そのまま、進むべき進行方向(進行方向アイコン30)を非表示とする。
【0070】
ステップS107、或いは、ステップS108の処理を終えて、処理がステップS109に移行すると、主制御部101は、ディスプレイ2に表示している地図(推奨経路を含む)を、更新するタイミングか否か判別する(ステップS109)。例えば、主制御部101は、前回に表示している地図を更新してから、移動体(自車両)が所定の距離(例えば、30m)だけ移動した場合に、地図を更新するタイミングと判定する。
【0071】
主制御部101は、地図を更新するタイミングと判定するまで待機する(ステップS109;No)。主制御部101は、地図を更新するタイミングと判定した場合には(ステップS109;Yes)、処理をステップS104、ステップS105に戻して、ディスプレイ2に表示している地図(推奨経路)を更新する。
【0072】
以上の処理を、演算処理部1が行うことにより、推奨経路上に「交差地点」が存在する場合に、「交差地点」から先において進むべき進行方向について、ユーザが容易に把握することができるようになる。
【0073】
なお、本発明は、上記実施形態に限定されず、種々の変形、応用が可能である。
【0074】
例えば、上記実施形態では、交差地点特定部106は、第1の特定方法を利用する場合、「交差地点」が存在すると判定した両リンクの直線式を連立して求めた共通解(X座標,Y座標)を、「交差地点」を特定する情報(位置情報)として記憶している。しかし、両リンクが実際に直線でないことがあり、必ずしも実際の「交差地点」が、求めた共通解と一致するわけではない。そこで、本発明では、例えば、交差地点特定部106は、両リンクの直線式を連立して求めた共通解(X座標,Y座標)に最も近い推奨経路上の位置を、「交差地点」を特定する情報(位置情報)として記憶してもよい。これにより、交差地点特定部106が特定する「交差地点」の位置を、実際の「交差地点」の位置に近づけることができる。
【0075】
また、上記実施形態では、「交差地点」を、推奨経路が自身の推奨経路と交差する地点として説明している。ここで、本発明の「交差地点」には、一般的な交差点だけでなく、立体交差なども含まれる。
【図面の簡単な説明】
【0076】
【図1】本発明の一実施形態が適用されたナビゲーション装置の概略構成図である。
【図2】地図データの構成例を示す図である。
【図3】演算処理部の機能構成を示す図である。
【図4】(A)第1の特定方法により「交差地点」を特定する方法を説明するための説明図である。(B)第2の特定方法により「交差地点」を特定する方法を説明するための説明図である。
【図5】進行方向表示処理のフロー図である。
【図6】進行方向特定情報の構成例を示す図である。
【図7】推奨経路を地図上に表示したときの画面表示例である。
【図8】「交差地点」から先の進むべき進行方向を表示したときの画面表示例である。
【図9】1度通過した「交差地点」を再度通過する場合に、「交差地点」から先の進むべき進行方向を表示したときの画面表示例である。
【符号の説明】
【0077】
1・・・演算処理部、2・・・ディスプレイ、3・・・記憶装置、4・・・音声入出力装置、5・・・入力装置、6・・・車速センサ、7・・・ジャイロセンサ、8・・・GPS受信装置、9・・・FM多重放送受信装置、10・・・ビーコン受信装置、20・・・移動体マーク、21・・・CPU、22・・・RAM、23・・・ROM、24・・・I/F、30・・・進行方向アイコン、41・・・マイクロフォン、42・・・スピーカ、100・・・ナビゲーション装置、101・・・主制御部、102・・・入力受付部、103・・・表示処理部、104・・・現在位置算出部、105・・・経路誘導部、106・・・交差地点特定部、107・・・進行方向特定部、310・・・地図データ、400・・・進行方向特定情報、410・・・交差地点、420・・・リンクA、430・・・リンクB、440・・・表示区間、450・・・進行方向、800・・・地図画面。
【技術分野】
【0001】
本発明は、ナビゲーション装置、および、ナビゲーション装置における推奨経路表示方法に関する。
【背景技術】
【0002】
一般的に、ナビゲーション装置は、出発地から目的地までの推奨経路を地図上に表示し、移動体の位置を示す移動体マークを推奨経路に沿って移動させて、経路誘導を行う。近年のナビゲーション装置のなかには、特定の地点を経由して目的地に至るような推奨経路を表示して、経路誘導を行うものもある。
【0003】
例えば、特許文献1には、ユーザに設定された特定の地点を経由する推奨経路をディスプレイに表示して、経路誘導を行うナビゲーション装置について記載されている。
【特許文献1】特開2003−214880号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特定の地点(経由地点)を経由する設定がされていると、その設定に基づいて探索した推奨経路が、1度通過した地点を再度通過する経路となっている場合がある。ここで、再度通過する地点は、推奨経路が自身の推奨経路と交差している地点であるため、以下では、「交差地点」とよぶ。
【0005】
そして、一般的に、地図上に表示する推奨経路は、出発地から目的地まで、同色、同形状の線などで強調されるため、推奨経路上に、上述した「交差地点」が存在すると、ユーザにとっては、推奨経路が分岐しているように見える。そのため、推奨経路に沿って移動させている移動体マークが「交差地点」を通過する手前で、ユーザが「交差地点」から先の進むべき進行方向を把握することは難しい。
【0006】
また、経由地点が設定されていなくても、推奨経路に「交差地点」が存在する場合もあり、そのような場合にも同様に、ユーザにとっては、「交差地点」から先の進むべき進行方向がわかりにくい。
【0007】
本発明は、ナビゲーション装置において、推奨経路上に、上述した「交差地点」が存在する場合であっても、「交差地点」から先の進むべき進行方向について、ユーザの把握を容易にする技術を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するための本願発明のナビゲーション装置は、推奨経路を表示する推奨経路表示手段と、前記推奨経路と、前記推奨経路と、が交差する交差地点を特定する交差地点特定手段と、移動体が前記交差地点特定手段により特定された交差地点に、所定距離近づいたかどうかを判断する判断手段と、前記判断手段により移動体と、前記交差地点と、の距離が、所定距離近づいたと判断されると、移動体の現在位置と、進行方向と、から、前記交差地点に進むべき進行方向を表示する進行方向表示手段と、を備える。
【発明の効果】
【0009】
本発明のナビゲーション装置によれば、推奨経路上に、上述した「交差地点」が存在する場合であっても、「交差地点」から先において進むべき進行方向を、ユーザが容易に把握することができるようになる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施形態の一例について図面を参照して説明する。
【0011】
図1は、本発明の一実施形態が適用されたナビゲーション装置100の概略構成図である。図示するように、ナビゲーション装置100は、演算処理部1と、ディスプレイ2と、記憶装置3と、音声入出力装置4(マイクロフォン41、スピーカ42)と、入力装置5と、車速センサ6と、ジャイロセンサ7と、GPS受信装置8と、FM多重放送受信装置9と、ビーコン受信装置10と、を備えている。なお、ナビゲーション装置100は、車両に載置されている車載用ナビゲーション装置としてもよいし、携帯電話やPDAなどの携帯端末としてもよい。
【0012】
演算処理部1は、様々な処理を行う中心的ユニットである。例えば、演算処理部1は、数値演算及び各デバイスを制御するといった様々な処理を実行するCPU(Central Processing Unit)21と、記憶装置3から読み出した地図データ、演算データなどを格納するRAM(Random Access Memory)22と、プログラムやデータを格納するROM(Read Only Memory)23と、各種ハードウェアを演算処理部1に接続するためのI/F(インタフェース)24と、を有する。そして、演算処理部1は、各デバイスをバス25で相互に接続した構成からなる。そして、後述する各機能部(101〜107)は、CPU21がRAM22などのメモリに読み出したプログラムを実行することで実現される。
【0013】
例えば、演算処理部1は、各種センサ(6、7)やGPS受信装置8から出力される情報を基にして現在地を検出する。また、得られた現在地情報に基づいて、表示に必要な地図データを記憶装置3から読み出す。また、読み出した地図データをグラフィック展開し、そこに現在地を示すマーク(或いは、移動体の位置を示す移動体マーク)を重ねてディスプレイ2に表示する。また、記憶装置3に記憶されている地図データを用いて、ユーザから指示された出発地(現在地)と目的地とを結ぶ最適な経路(推奨経路)を探索する。また、音声入出力装置4のスピーカ42やディスプレイ2を用いてユーザを誘導する。
【0014】
ディスプレイ2は、演算処理部1で生成されたグラフィックス情報を表示するユニットである。ディスプレイ2は、液晶ディスプレイや有機EL(Electro-Luminescence)ディスプレイなどで構成される。
【0015】
記憶装置3は、CD−ROMやDVD−ROMやHDDやICカードといった記憶媒体で構成される。この記憶媒体には、例えば、地図データ310、音声データ、動画データ、等が記憶されている。
【0016】
図2は、地図データ310の概略データ構造を示す図である。地図データ310は、地図上の区画された領域であるメッシュの識別コード(メッシュID)311ごとに、そのメッシュ領域に含まれている道路を構成する各リンクのリンクデータ320を含んでいる。
【0017】
リンクデータ320は、リンクの識別コード(リンクID)321ごとに、リンクを構成する2つのノード(開始ノード、終了ノード)の座標情報322、リンクを含む道路の種別情報323、リンクの長さを示すリンク長情報324、リンク旅行時間325、2つのノードにそれぞれ接続するリンクの識別コード(接続リンクID)326、などを含んでいる。なお、ここでは、リンクを構成する2つのノードについて開始ノードと終了ノードとを区別することで、道路の上り方向と下り方向とを、それぞれ別のリンクとして管理することができる。
【0018】
図1に戻り、音声入出力装置4は、音声入力装置としてマイクロフォン41と、音声出力装置としてスピーカ42と、を備える。マイクロフォン41は、ユーザやその他の搭乗者から発された音声などの、ナビゲーション装置100の外部の音声を取得する。スピーカ42は、演算処理部1で生成された音声信号を出力する。これらのマイクロフォン41とスピーカ42は、車両の所定の部位に、別個に配置されている。
【0019】
入力装置5は、ユーザからの指示を受け付けるユニットである。入力装置5は、タッチパネル51と、ダイヤルスイッチ52と、その他のハードスイッチ(図示せず)であるスクロールキー、縮尺変更キーなどで構成される。
【0020】
タッチパネル51は、ディスプレイ2の表示面に貼られた透過性のある操作パネルである。タッチパネル51は、ディスプレイ2に表示された画像のXY座標と対応したタッチ位置を特定し、タッチ位置を座標に変換して出力する。タッチパネル51は、感圧式または静電式の入力検出素子などにより構成される。
【0021】
ダイヤルスイッチ52は、時計回り及び反時計回りに回転可能に構成され、所定の角度の回転ごとにパルス信号を発生し、演算処理部1に出力する。演算処理部1では、パルス信号の数から、ダイヤルスイッチ52の回転角度を求める。
【0022】
車速センサ6、ジャイロセンサ7、及び、GPS受信装置8は、移動体(ナビゲーション装置100)の現在位置(自車位置)などを検出するために使用される。車速センサ6は、車速を算出するために用いる車速データを出力するセンサである。ジャイロセンサ7は、光ファイバジャイロや振動ジャイロ等で構成され、移動体の回転による角速度を検出するものである。GPS受信装置8は、GPS衛星からの信号を受信し、移動体とGPS衛星間の距離とその距離の変化率を3個以上の衛星に対して測定することで、移動体の現在位置や進行速度を測定する。
【0023】
FM多重放送受信装置9は、FM多重放送局から送られてくるFM多重放送信号を受信する。FM多重放送には、VICS(Vehicle Information Communication System:登録商標)情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報などのFM多重一般情報としてラジオ局が提供する文字情報などがある。
【0024】
ビーコン受信装置10は、ビーコンから送られてくる渋滞情報、規制情報、SA/PA情報、駐車場情報などを受信する。
【0025】
図3は、演算処理部1の機能ブロック図である。図示するように、演算処理部1は、主制御部101と、入力受付部102と、表示処理部103と、現在位置算出部104と、経路誘導部105と、交差地点特定部106と、進行方向特定部107と、を有する。
【0026】
主制御部101は、演算処理部1の各部を統括して制御する処理を行う。
【0027】
入力受付部102は、入力装置5に入力されたユーザからの要求を受け付け、その要求内容を解析する。入力受付部102は、解析結果に応じたデータを主制御部101に通知する。例えば、入力受付部102は、ナビゲーション装置100に、電源の供給、切断を指示する要求、等を受け付け、主制御部101に通知する。また、入力受付部102は、ナビゲーション装置100が有する各種機能の設定に関する入力データを受け付け、主制御部101に通知する。
【0028】
表示処理部103は、ディスプレイ2に、地図や、施設を示す施設アイコン、等を表示させる。具体的には、表示処理部103は、ディスプレイ2に表示させるための描画コマンドを生成して通知する。なお、表示処理部103は、地図をディスプレイ2に表示させる際には、表示が要求された領域(例えば、ナビゲーション装置100の現在位置付近の領域)にある地図データを記憶装置3から抽出し、指定された縮尺、描画方式で、道路、その他の地図構造物、現在位置、目的地、等を描画するように地図描画コマンドを生成する。また、表示処理部103は、ディスプレイ2に表示させた地図上に、移動体(自車両)の位置を示す移動体マーク(カーマーク)や各種設定画面などが表示させる。
【0029】
現在位置算出部104は、ナビゲーション装置100の現在位置を算出する。具体的には、現在位置算出部104は、車速センサ6で出力された車速データに基づいて算出した移動体(ナビゲーション装置100)の進行速度、および、ジャイロセンサ7で検出した角速度データを各々積分した結果得られる距離データおよび角度データを用い、そのデータを時間軸で積分していくことにより、初期位置(X,Y)から移動後(自車走行後)の位置(X’,Y’)を定期的に演算する。また、演算結果を用いて、マップマッチ処理することにより、形状の相関が最も高い道路(リンク)上に現在位置を合わせ込む。また、定期的にGPS受信装置8の出力データを用いて現在位置を修正する。なお、移動体(ナビゲーション装置100)が停止しているときには、GPS受信装置8の出力データだけを用いて現在位置を求めてもよい。
【0030】
経路誘導部105は、ダイクストラ法等を用いて、指定された2地点(現在地、目的地)間を結ぶ経路のコスト(例えば、総距離や総旅行時間)が最小となる経路を探索し、探索した経路(推奨経路)を用いて経路誘導を行う。このとき、経路誘導部105は、探索した推奨経路を構成する各リンクの識別コード(リンクID)321を、それぞれ対応付けてRAM22等のメモリに記憶しておく。また、経路誘導部105は、推奨経路の情報と、現在位置とを比較し、主要な交差点(上述した「交差地点」に該当する場合は除く)等を通過する前に直進すべきか、右左折すべきかを、ディスプレイ2に表示させるとともに、音声入出力装置4のスピーカ42を用いて音声でユーザに知らせる。また、経路誘導部105は、表示処理部103を介して、ディスプレイ2に表示された地図の範囲に含まれている推奨経路を表示(強調表示)する。このとき、経路誘導部105は、移動体(車両)の現在位置を示す移動体マーク(カーマーク)を推奨経路上(例えば、画面中心)に表示する。
【0031】
また、経路誘導部105は、ユーザの指示に従って、地図を推奨経路に沿ってスクロールする処理を行ってもよい。この場合には、経路誘導部105は、移動体の現在位置ではなく、地図上における移動体の仮想的な位置を示す移動体マークを、推奨経路上に表示する。
【0032】
交差地点特定部106は、経路誘導部105が探索した推奨経路が、自身の推奨経路と交差する「交差地点」を特定する処理を行う。交差地点特定部106は、例えば、以下に示す2種類の方法により、「交差地点」を特定する。
【0033】
<第1の特定方法>
第1の特定方法により、「交差地点」を特定する場合、交差地点特定部106は、RAM22等のメモリから、推奨経路を構成する全リンクのリンクID321を読み出す。そして、読み出した全リンクから2つのリンクを選択し、選択した両リンクが交差しているか否か(「交差地点」が存在するか否か)について判断する。ここで、交差地点特定部106は、交差しているか否かの判断を、全リンクから2つのリンクを選択し得る全ての組み合わせに対して行う。
【0034】
図4(A)は、第1の特定方法において、選択した両リンクが交差しているか否かを判断する処理を説明するための説明図である。図示するように、交差地点特定部106は、選択した両リンク(リンクA、リンクB)のそれぞれのリンクについて、開始ノードA、Bと、終了ノードA、Bと、を特定する。具体的には、交差地点特定部106は、両リンクのリンクID321に対応する座標情報322を参照して、リンクAの開始ノードAの座標(XSA,YSA)および終了ノードAの座標(XEA,YEA)と、リンクBの開始ノードBの座標(XSB,YSB)および終了ノードBの座標(XEB,YEB)を特定する。そして、交差地点特定部106は、リンクAの開始ノードAと終了ノードAを結ぶ直線を示す数式(例えば、「y=ax+b」)と、リンクBの開始ノードBと終了ノードBとを結ぶ直線を示す数式(例えば、「y=cx+d」)と、を求める。そして、交差地点特定部106は、求めた両リンクの直線が、両リンクの範囲において共通解を有するか否かを判別して、選択した両リンクが交差しているか否かを判断する。より具体的には、交差地点特定部106は、求めた両リンクの直線式を連立して、図示するような存在条件(XSA≦共通解のX座標≦XEA、かつ、XEB≦共通解のX座標≦XSB)を満たす共通解が存在する場合に、選択した両リンクが交差していると判定し、存在条件を満たす共通解が存在しない場合に、選択した両リンクは交差していないと判定する。
【0035】
交差地点特定部106は、選択した両リンクが交差していると判定した場合においては、両リンクが交差している「交差地点」(図示する例では、地点A)を特定するための情報をRAM22等のメモリに記憶する。具体的には、例えば、交差地点特定部106は、「交差地点」が存在すると判定した両リンクの直線式を連立して求めた共通解(X座標,Y座標)を、「交差地点」を特定する情報として記憶する。これとともに、交差地点特定部106は、両リンクのリンクID321を、「交差地点」を特定する情報に対応付けて記憶する。
【0036】
<第2の特定方法>
次に、第2の特定方法により、交差地点特定部106が「交差地点」を特定する処理について説明する。交差地点特定部106は、第1の特定方法と同様に、RAM22等のメモリから、推奨経路を構成する全リンクのリンクID321を読み出す。そして、読み出した全リンクから2つのリンクを選択し、選択した両リンクに「交差地点」が存在するか否かについて判断する。ここで、交差地点特定部106は、「交差地点」が存在するか否かの判断を、全リンクから2つのリンクを選択し得る全ての組み合わせに対して行う。
【0037】
図4(B)は、第2の特定方法において、選択した両リンクに「交差地点」が存在するか否かを判断する処理を説明するための説明図である。図示するように、交差地点特定部106は、選択した両リンク(リンクA、リンクB)のそれぞれのリンクについて、終了ノードA、Bを特定する。具体的には、交差地点特定部106は、両リンクのリンクID321に対応する座標情報322を参照して、リンクAの終了ノードAの座標(XEA,YEA)と、リンクBの終了ノードBの座標(XEB,YEB)を特定する。そして、交差地点特定部106は、リンクAの終了ノードAと、リンクBの終了ノードBと、が一致、或いは、ほぼ一致(所定の距離内に存在)するか否かを判別して、選択した両リンクに「交差地点」が存在するか否かを判断する。より具体的には、交差地点特定部106は、リンクAの終了ノードAと、リンクBの終了ノードBと、が一致、或いは、ほぼ一致する場合には、選択した両リンクに「交差地点」が存在すると判定し、それ以外の場合には、選択した両リンクに「交差地点」は存在しないと判定する。
【0038】
交差地点特定部106は、選択した両リンクに「交差地点」が存在していると判定した場合においては、両リンクが交差している「交差地点」(図示する例では、地点A)を特定するための情報をRAM22等のメモリに記憶する。例えば、交差地点特定部106は、「交差地点」が存在すると判定した両リンクの終了ノードの座標(座標情報322の終了ノード)を、「交差地点」を特定する情報として記憶する。
【0039】
以上のように、交差地点特定部106は、第1の特定方法、第2の特定方法、或いは、第1の特定方法と第2の特定方法の併用、によって、推奨経路上に存在する「交差地点」を特定する。なお、本発明は、第1の特定方法、第2の特定方法に限定するものではなく、交差地点特定部106は、それ以外の方法を用いて、「交差地点」を特定してもよい。
【0040】
図3に戻り、進行方向特定部107は、交差地点特定部106が特定した「交差地点」から先の進行方向についてユーザが容易にわかるように、「交差地点」から先の進むべき進行方向を示すアイコンを、表示処理部103を介してディスプレイ2に表示する。具体的には、進行方向特定部107は、経路誘導部105によって推奨経路に沿って移動する移動体マークが、交差地点特定部106により特定された「交差地点」を通過する前に、「交差地点」から先の進行すべき進行方向(アイコン)を表示する。
【0041】
次に、上記構成からなるナビゲーション装置100の特徴的な動作について説明する。図5は、ナビゲーション装置100の演算処理部1が行う進行方向表示処理を示すフローチャートである。
【0042】
演算処理部1の主制御部101は、入力受付部102を介して推奨経路を表示する処理(例えば、経路誘導処理や、推奨経路に沿って地図をスクロールさせる処理、など)を開始する指示を受け付けると、進行方向表示処理を開始する。具体的には、例えば、表示処理部103が推奨経路を表示する処理の開始を指示するためのボタンを、メニュー画面(図示せず)に表示しておき、そのボタンにタッチする操作がタッチパネル51になされた場合に、進行方向表示処理を開始する。
【0043】
進行方向表示処理を開始後、経路誘導部105は、推奨経路を探索する(ステップS101)。具体的には、経路誘導部105は、入力受付部102を介して受け付けた条件(例えば、経由地の設定、など)を満たし、かつ、2地点(現在地、目的地)間を結ぶ経路、のコストが最小となる推奨経路を探索する。
【0044】
そして、経路誘導部105は、探索した推奨経路を構成する全リンクを特定するリンクID321を、RAM22に記憶する。
【0045】
続いて、交差地点特定部106は、ステップS101で探索した推奨経路において、上述した「交差地点」を特定する処理を行う(ステップS102)。具体的には、交差地点特定部106は、ステップS101でRAM22に記憶しておいたリンクID321(推奨経路を構成する全リンク)を読み出し、上述した第1の特定方向、或いは、第2の特定方法により、「交差地点」を特定する。そして、交差地点特定部106は、ステップS102において特定した「交差地点」について、「交差地点」を特定する情報(例えば、「交差地点」の座標など)を、RAM22に記憶する。また、交差地点特定部106は、「交差地点」で交差している両リンク(リンクA、リンクB)のリンクID321を、「交差地点」を特定する情報に対応付けてRAM22に記憶する。
【0046】
ただし、ステップS102において、「交差地点」が1つも特定できない場合には、交差地点特定部106は、推奨経路に「交差地点」が1つも存在しないことを示す情報を、RAM22に記憶する。
【0047】
また、ステップS102において、複数の「交差地点」を特定した場合には、交差地点特定部106は、それぞれの「交差地点」について、「交差地点」を特定する情報、および、交差している両リンクを特定する情報、をRAM22に記憶する。
【0048】
次に、進行方向特定部107は、移動体マークが「交差地点」を通過した後に進むべき進行方向を求めて、求めた進行方向を地図上に表示するために必要な進行方向特定情報400を生成する(ステップS103)。
【0049】
具体的には、ステップS102において交差地点特定部106が第1の特定方法で、「交差地点」を特定している場合、進行方向特定部107は、まず、「交差地点」で交差しているリンク(リンクA、リンクB)のリンクID321を、RAM22から読み出す。進行方向処理部107は、読み出したリンクを、移動体マークが「交差地点」を通過した後に移動するリンクとして特定し、特定したリンクのリンクID321に対応付けられている座標情報322(開始ノード及び終了ノード)を、地図データ310から読み出す。
【0050】
一方、ステップS102において交差地点特定部106が第2の特定方法で、「交差地点」を特定している場合、進行方向特定部107は、まず、「交差地点」を特定する情報(終了ノードの座標)を開始ノードとしているリンク(リンクID321)について、RAM22から検索する。進行方向処理部107は、検索したリンクを、移動体マークが「交差地点」を通過した後に移動するリンクとして特定し、特定したリンクのリンクID321に対応付けられている座標情報322(開始ノード及び終了ノード)を、地図データ310から読み出す。
【0051】
そして、どちらの特定方法(第1の特定方法、第2の特定方法)で「交差地点」を特定した場合においても、進行方向処理部107は、読み出した開始ノードから見た終了ノードの方向(方位)を求める。ここで、進行方向処理部107が求める方向(方位)は、例えば、開始ノードを始点とし、終了ノードを終点とする方位ベクトルでよい。そして、進行方向特定部107は、求めた方向(方位)を、移動体マークが「交差地点」を通過した後に進むべき進行方向450として、RAM22(進行方向特定情報400)に記憶する。なお、「交差地点」は、当然ながら複数のリンクが交差している地点であるため、1つの「交差地点」に対して、必ず複数の進行方向450が求まる。従って、進行方向特定部107は、求めた複数の進行方向450を、それぞれ、RAM22(進行方向特定情報400)に記憶する。また、進行方向特定部107は、求めた進行方向450と、「交差地点」を特定する情報と、をRAM22(進行方向特定情報400)に対応付けて記憶する。
【0052】
さらに、進行方向特定部107は、求めた進行方向450(アイコン)を地図上に表示すべき期間に、移動体マーク(カーマーク)が推奨経路上に位置している区間を特定する表示区間440を求める。なお、後述するステップS107において、ステップS103で求めた表示区間440に移動体マーク(カーマーク)が位置している間、進行方向450(アイコン)は、地図上に表示される。
【0053】
表示区間440を求める方法は任意であるが、例えば、進行方向特定部107は、交差地点410から所定の距離(例えば、300m)だけ、手前方向(進行方向450と逆方向)に離れた推奨経路上の位置と、交差地点410と、の間の区間の推奨経路を、表示区間440として求める。そして、進行方向特定部107は、求めた表示区間440を、進行方向特定情報400に記憶されている交差地点410及び進行方向450に対応付けて、RAM22(進行方向特定情報400)に記憶する。
【0054】
図6は、進行方向特定部107が求めた表示区間440及び進行方向450と、「交差地点」を特定する情報(交差地点410)と、を記憶する進行方向特定情報400の概略データ構造を示す図である。進行方向特定情報400は、交差地点410及び進行方向450の組み合わせごとのレコード460からなる。各レコード460には、交差地点410と、リンクAのリンクID420と、リンクBのリンクID430と、の表示区間440と、進行方向450と、が対応付けて格納される。
【0055】
交差地点410は、ステップS102において交差地点特定部106がRAM22に記憶した「交差地点」を特定する情報であり、例えば、上述した第1の特定方法を利用して求めた共通解(X座標,Y座標)データでもよいし、上述した第2の特定方法を利用して特定した座標データ(終了ノード)でもよい。
【0056】
リンクAのリンクID420は、「交差地点」で交差している両リンクのうち、一方のリンクAを特定する情報であり、例えば、リンクAのリンクID321に対応するデータとする。
【0057】
リンクBのリンクID430は、「交差地点」で交差している両リンクのうち、リンクAではない方のリンクBを特定する情報であり、例えば、リンクBのリンクID321に対応するデータとする。
【0058】
表示区間440は、推奨経路上で進行方向(アイコン)を表示する区間(或いは領域でもよい)を特定するデータであり、例えば、進行方向(アイコン)の表示開始座標と、表示終了座標である。ここで、表示開始座標は、例えば、「交差地点」から所定の距離(例えば、300m)だけ、手前方向(進行方向と逆方向)に離れた推奨経路上の位置を示す座標とし、表示終了座標は、例えば、「交差地点」の位置を示す座標とする。
【0059】
進行方向450は、移動体マークが「交差地点」を通過した後に進むべき進行方向を特定するデータであり、例えば、進行方向特定部107が求めた進行方向(方位ベクトルなど)である。
【0060】
図5に戻り、処理をステップS104に移行すると、現在位置算出部104は、ナビゲーション装置100の現在位置を算出する(ステップS104)。
【0061】
続いて、表示処理部103は、ディスプレイ2に、ステップS104で算出した現在位置付近の領域にある地図を表示する。そして、経路誘導部105は、ステップS101で探索した推奨経路を構成するリンクのうち、ディスプレイ2に表示された地図の範囲に含まれているリンク(経路)を表示(強調表示)する(ステップS105)。このとき、経路誘導部105は、移動体(車両)の現在位置を示す移動体マーク(カーマーク)を推奨経路上(例えば、画面中心)に表示する。
【0062】
図7は、ステップS105において、推奨経路を地図上に表示したときの画面表示例を示す図である。図示するように、地図画面800には、移動体の現在位置付近の地図と、移動体の位置を示す移動体マーク20と、推奨経路(太線)と、が同一地図上に表示される。
【0063】
この時点(移動体と地点Aが遠距離)では、ドライバー(ユーザ)は、推奨経路が自身の推奨経路と交差する地点A(「交差地点」)において、地点Aを通過した後に、どちらの方向に進むべきか判断できない。
【0064】
図5に戻り、処理がステップS106に移行すると、進行方向特定部107は、移動体(移動体マーク)が、上記の「交差地点(地点A)」に所定距離近づいたかどうか判断する(ステップS106)。例えば、進行方向特定部107は、移動体(移動体マーク)が、ステップS103で求めた表示区間440内に位置しているか否か判別すればよい。具体的には、進行方向特定部107は、RAM22(進行方向特定情報400)にアクセスして、ステップS104で算出された現在位置を包含する表示区間440を検索する。検索した結果、包含する表示区間440がある場合には、処理をステップS107に移行する。一方、包含する表示区間440がない場合には、処理をステップS108に移行する。また、推奨経路上に「交差地点」が1つも存在しないことを示す情報がRAM22に記憶されている場合にも、処理をステップS108に移行する。
【0065】
ステップS107に処理が移行すると、進行方向特定部107は、移動体マークが「交差地点」を通過した後に進むべき進行方向(アイコン)を地図上に表示する(ステップS107)。具体的には、進行方向特定部107は、RAM22(進行方向特定情報400)にアクセスして、ステップS106で検索した表示区間440(例えば、表示区間A)に対応付けて記憶されている進行方向450(例えば、方位A)を特定する。そして、進行方向特定部107は、特定した進行方向450を示す進行方向アイコン30を、地図上に表示する。ここで、進行方向特定部107は、矢印を象った進行方向アイコン30をROM23等のメモリに予め格納しておき、メモリから読み出した進行方向アイコン30を、特定した進行方向450に回転させて表示(点滅表示)する。なお、進行方向450ごとの進行方向アイコン30を予めメモリに格納しておき、特定した進行方向450に対応する進行方向アイコン30をメモリから読み出して、地図上に表示するようにしてもよい。
【0066】
図8は、ステップS107において、移動体マークが「交差地点」を通過した後に進むべき進行方向(アイコン)を地図上に表示したときの画面表示例を示す図である。図示するように、進行方向特定部107は、図7で示した地図画面800に、進行方向アイコン30を重ねて表示する。ここで表示する進行方向アイコン30は、ドライバー(ユーザ)の注意を引くために、点滅させて表示してもよいし、ドライバー(ユーザ)の注意を引く色で表示してもよい。また、進行方向特定部107は、進行方向アイコン30を、例えば、図示するような位置(「交差地点」付近、かつ、推奨経路上)に表示するようにする。
【0067】
また、図9は、ステップS107において、移動体マーク20が、1度通過した地点A(「交差地点」)を再度通過する場合に、再度通過した後に進むべき進行方向(アイコン)を地図上に表示したときの画面表示例を示す図である。
【0068】
このとき、進行方向特定部107は、上述した処理と同様に、RAM22(進行方向特定情報400)にアクセスして、ステップS106で検索した表示区間440(例えば、表示区間B)に対応付けて記憶されている進行方向450(例えば、方位B)を特定する。そして、進行方向特定部107は、特定した進行方向450を示す進行方向アイコン30を、地図上に表示する。
【0069】
図5に戻り、処理がステップS108に移行すると、進行方向特定部107は、「交差地点」から先において進むべき進行方向(進行方向アイコン30)を地図上に表示しないようにする(ステップS108)。例えば、移動体マーク20が「交差地点」を通過した場合に、進むべき進行方向(進行方向アイコン30)を地図上に表示しないようにする。また、ステップS108に移行する前に、進むべき進行方向(進行方向アイコン30)が表示されていない場合は、進行方向特定部107は、そのまま、進むべき進行方向(進行方向アイコン30)を非表示とする。
【0070】
ステップS107、或いは、ステップS108の処理を終えて、処理がステップS109に移行すると、主制御部101は、ディスプレイ2に表示している地図(推奨経路を含む)を、更新するタイミングか否か判別する(ステップS109)。例えば、主制御部101は、前回に表示している地図を更新してから、移動体(自車両)が所定の距離(例えば、30m)だけ移動した場合に、地図を更新するタイミングと判定する。
【0071】
主制御部101は、地図を更新するタイミングと判定するまで待機する(ステップS109;No)。主制御部101は、地図を更新するタイミングと判定した場合には(ステップS109;Yes)、処理をステップS104、ステップS105に戻して、ディスプレイ2に表示している地図(推奨経路)を更新する。
【0072】
以上の処理を、演算処理部1が行うことにより、推奨経路上に「交差地点」が存在する場合に、「交差地点」から先において進むべき進行方向について、ユーザが容易に把握することができるようになる。
【0073】
なお、本発明は、上記実施形態に限定されず、種々の変形、応用が可能である。
【0074】
例えば、上記実施形態では、交差地点特定部106は、第1の特定方法を利用する場合、「交差地点」が存在すると判定した両リンクの直線式を連立して求めた共通解(X座標,Y座標)を、「交差地点」を特定する情報(位置情報)として記憶している。しかし、両リンクが実際に直線でないことがあり、必ずしも実際の「交差地点」が、求めた共通解と一致するわけではない。そこで、本発明では、例えば、交差地点特定部106は、両リンクの直線式を連立して求めた共通解(X座標,Y座標)に最も近い推奨経路上の位置を、「交差地点」を特定する情報(位置情報)として記憶してもよい。これにより、交差地点特定部106が特定する「交差地点」の位置を、実際の「交差地点」の位置に近づけることができる。
【0075】
また、上記実施形態では、「交差地点」を、推奨経路が自身の推奨経路と交差する地点として説明している。ここで、本発明の「交差地点」には、一般的な交差点だけでなく、立体交差なども含まれる。
【図面の簡単な説明】
【0076】
【図1】本発明の一実施形態が適用されたナビゲーション装置の概略構成図である。
【図2】地図データの構成例を示す図である。
【図3】演算処理部の機能構成を示す図である。
【図4】(A)第1の特定方法により「交差地点」を特定する方法を説明するための説明図である。(B)第2の特定方法により「交差地点」を特定する方法を説明するための説明図である。
【図5】進行方向表示処理のフロー図である。
【図6】進行方向特定情報の構成例を示す図である。
【図7】推奨経路を地図上に表示したときの画面表示例である。
【図8】「交差地点」から先の進むべき進行方向を表示したときの画面表示例である。
【図9】1度通過した「交差地点」を再度通過する場合に、「交差地点」から先の進むべき進行方向を表示したときの画面表示例である。
【符号の説明】
【0077】
1・・・演算処理部、2・・・ディスプレイ、3・・・記憶装置、4・・・音声入出力装置、5・・・入力装置、6・・・車速センサ、7・・・ジャイロセンサ、8・・・GPS受信装置、9・・・FM多重放送受信装置、10・・・ビーコン受信装置、20・・・移動体マーク、21・・・CPU、22・・・RAM、23・・・ROM、24・・・I/F、30・・・進行方向アイコン、41・・・マイクロフォン、42・・・スピーカ、100・・・ナビゲーション装置、101・・・主制御部、102・・・入力受付部、103・・・表示処理部、104・・・現在位置算出部、105・・・経路誘導部、106・・・交差地点特定部、107・・・進行方向特定部、310・・・地図データ、400・・・進行方向特定情報、410・・・交差地点、420・・・リンクA、430・・・リンクB、440・・・表示区間、450・・・進行方向、800・・・地図画面。
【特許請求の範囲】
【請求項1】
ナビゲーション装置であって、
推奨経路を表示する推奨経路表示手段と、
前記推奨経路と、前記推奨経路と、が交差する交差地点を特定する交差地点特定手段と、
移動体が前記交差地点特定手段により特定された交差地点に、所定距離近づいたかどうかを判断する判断手段と、
前記判断手段により移動体と、前記交差地点と、の距離が、所定距離近づいたと判断されると、移動体の現在位置と、進行方向と、から、前記交差地点に進むべき進行方向を表示する進行方向表示手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置であって、
前記進行方向表示手段は、
前記移動体が、前記交差地点から所定の距離手前の位置に到達してから、前記交差地点を通過するまでの間、前記交差地点から進むべき進行方向を表示し続ける、
ことを特徴とするナビゲーション装置。
【請求項3】
請求項1又は2に記載のナビゲーション装置であって、
前記交差地点特定手段は、
前記推奨経路と、前記推奨経路と、が交差する交差点、及び、前記推奨経路と、前記推奨経路と、が立体交差する立体交差点、を特定する、
ことを特徴とするナビゲーション装置。
【請求項4】
ナビゲーション装置における推奨経路表示方法であって、
前記ナビゲーション装置は、制御部を有し、
前記制御部が、
推奨経路を表示する推奨経路表示ステップと、
前記推奨経路と、前記推奨経路と、が交差する交差地点を特定する交差地点特定ステップと、
移動体が前記交差地点特定ステップで特定された交差地点に、所定距離近づいたかどうかを判断する判断ステップと、
前記判断ステップで移動体と、前記交差地点と、の距離が、所定距離近づいたと判断されると、移動体の現在位置と、進行方向と、から、前記交差地点に進むべき進行方向を表示する進行方向表示ステップと、
を行うことを特徴とする推奨経路表示方法。
【請求項1】
ナビゲーション装置であって、
推奨経路を表示する推奨経路表示手段と、
前記推奨経路と、前記推奨経路と、が交差する交差地点を特定する交差地点特定手段と、
移動体が前記交差地点特定手段により特定された交差地点に、所定距離近づいたかどうかを判断する判断手段と、
前記判断手段により移動体と、前記交差地点と、の距離が、所定距離近づいたと判断されると、移動体の現在位置と、進行方向と、から、前記交差地点に進むべき進行方向を表示する進行方向表示手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置であって、
前記進行方向表示手段は、
前記移動体が、前記交差地点から所定の距離手前の位置に到達してから、前記交差地点を通過するまでの間、前記交差地点から進むべき進行方向を表示し続ける、
ことを特徴とするナビゲーション装置。
【請求項3】
請求項1又は2に記載のナビゲーション装置であって、
前記交差地点特定手段は、
前記推奨経路と、前記推奨経路と、が交差する交差点、及び、前記推奨経路と、前記推奨経路と、が立体交差する立体交差点、を特定する、
ことを特徴とするナビゲーション装置。
【請求項4】
ナビゲーション装置における推奨経路表示方法であって、
前記ナビゲーション装置は、制御部を有し、
前記制御部が、
推奨経路を表示する推奨経路表示ステップと、
前記推奨経路と、前記推奨経路と、が交差する交差地点を特定する交差地点特定ステップと、
移動体が前記交差地点特定ステップで特定された交差地点に、所定距離近づいたかどうかを判断する判断ステップと、
前記判断ステップで移動体と、前記交差地点と、の距離が、所定距離近づいたと判断されると、移動体の現在位置と、進行方向と、から、前記交差地点に進むべき進行方向を表示する進行方向表示ステップと、
を行うことを特徴とする推奨経路表示方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−122066(P2010−122066A)
【公開日】平成22年6月3日(2010.6.3)
【国際特許分類】
【出願番号】特願2008−295998(P2008−295998)
【出願日】平成20年11月19日(2008.11.19)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
【公開日】平成22年6月3日(2010.6.3)
【国際特許分類】
【出願日】平成20年11月19日(2008.11.19)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
[ Back to top ]