
ナビゲーション装置、および、リモートコントローラを用いた施設の検索方法
【課題】ナビゲーション装置において、ユーザにとって直感的に理解しやすい操作で、
施設を検索することができるようにする技術を提供する。
【課題を解決するための手段】
本発明のナビゲーション装置100は、リモートコントローラ51からの入力を受け付けるナビゲーション装置100であって、施設の位置情報を記憶している記憶手段と、リモートコントローラ51が向けられている絶対方位θaを算出する絶対方位算出手段と、現在位置を算出する現在位置算出手段と、現在位置からみて、絶対方位θaが示す方向の所定の検索領域に位置する施設を、記憶手段から検索する施設検索手段と、検索した施設を表示する表示手段と、を備える。
施設を検索することができるようにする技術を提供する。
【課題を解決するための手段】
本発明のナビゲーション装置100は、リモートコントローラ51からの入力を受け付けるナビゲーション装置100であって、施設の位置情報を記憶している記憶手段と、リモートコントローラ51が向けられている絶対方位θaを算出する絶対方位算出手段と、現在位置を算出する現在位置算出手段と、現在位置からみて、絶対方位θaが示す方向の所定の検索領域に位置する施設を、記憶手段から検索する施設検索手段と、検索した施設を表示する表示手段と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置、および、リモートコントローラを用いた施設の検索方法に関する。
【背景技術】
【0002】
従来のナビゲーション装置は、ユーザによって指定されたジャンルに基づき自車位置周辺の施設を検索する施設検索機能を有している。例えば、特許文献1には、施設検索機能を有するナビゲーション装置において、施設の検索範囲を、車両方位に限定することについて記載されている。ここで、施設の検索範囲の指定は、タッチパネルにタッチする操作や、リモートコントローラ(以下では、「リモコン」とよぶ)に備えられたボタンを押す操作により行われる。
【特許文献1】特開2005−55259号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、目的の施設のおおよその方向を知っているユーザにとって、その施設を検索するために、ディスプレイに表示されている地図を見ながら、上述のような操作を行うことは、手間である。そして、自車位置周辺や、車両の進行方向にはない施設を検索するためには、さらに煩雑な操作を必要とする場合もある。
【0004】
本発明は、ナビゲーション装置において、ユーザにとって直感的に理解しやすい操作で、
施設を検索することができるようにする技術を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決するための本願発明のナビゲーション装置は、リモートコントローラからの入力を受け付けるナビゲーション装置であって、施設の位置情報を記憶している記憶手段と、前記リモートコントローラが向けられている絶対方位を算出する絶対方位算出手段と、現在位置を算出する現在位置算出手段と、前記現在位置から前記絶対方位が示す方向の所定の検索領域に位置する施設を、前記記憶手段から検索する施設検索手段と、検索した施設を表示する表示手段と、を備える。
【発明の効果】
【0006】
本発明のナビゲーション装置によれば、ユーザにとって直感的に理解しやすい操作で、
施設の検索を行うことができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の実施形態の一例を図面を参照して説明する。
【0008】
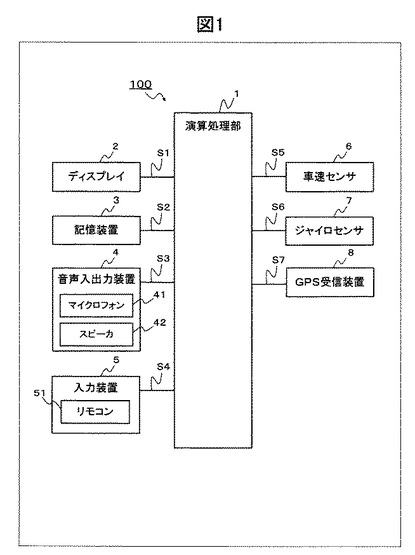
図1は、本発明の一実施形態が適用された車載用ナビゲーション装置100の概略構成図である。図示するように、車載用ナビゲーション装置100は、演算処理部1と、ディスプレイ2と、記憶装置3と、音声入出力装置4と、入力装置5と、車速センサ6と、ジャイロセンサ7と、GPS受信装置8と、を備えている。
【0009】
演算処理部1は、様々な処理を行う中心的ユニットである。例えば、各種センサ(6、7)やGPS受信装置8から出力される情報を基にして現在地を検出する。また、得られた現在地情報に基づいて、表示に必要な地図データを記憶装置3から読み出す。また、読み出した地図データをグラフィック展開し、そこに現在地を示すマークを重ねてディスプレイ2に表示する。また、記憶装置3に記憶されている地図データを用いて、ユーザから指示された出発地(現在地)と目的地とを結ぶ最適な経路(推奨経路)を探索する。また、音声入出力装置4やディスプレイ2を用いてユーザを誘導する。
また、演算処理部1は、後述するリモコン51の先端部分が向けられている絶対方位を算出する。絶対方位を算出する具体的な方法については、後述する。
【0010】
ディスプレイ2は、演算処理部1で生成されたグラフィックス情報を表示するユニットである。ディスプレイ2は、液晶ディスプレイや有機EL(Electro-Luminescence)ディスプレイなどで構成される。
【0011】
記憶装置3は、CD−ROMやDVD−ROMやHDDやICカードといった記憶媒体で構成されている。この記憶媒体には、例えば、地図データ310、周辺施設情報400等が記憶されている。
【0012】
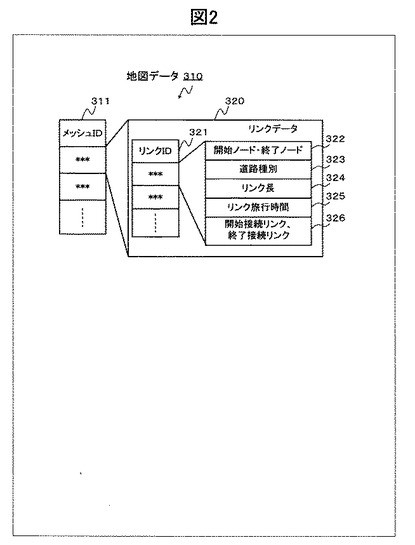
地図データ310の概略データ構造を図2に示す。地図データ310は、地図上の区画された領域であるメッシュの識別コード(メッシュID)311ごとに、そのメッシュ領域に含まれている道路を構成する各リンクのリンクデータ320を含んでいる。
【0013】
リンクデータ320は、リンクの識別コード(リンクID)321ごとに、リンクを構成する2つのノード(開始ノード、終了ノード)の座標情報322、リンクを含む道路の種別情報323、リンクの長さを示すリンク長情報324、リンク旅行時間325、2つのノードにそれぞれ接続するリンクの識別コード(接続リンクID)326、リンク周辺に位置する施設の識別コード(周辺施設ID)327、などを含んでいる。なお、ここでは、リンクを構成する2つのノードについて開始ノードと終了ノードとを区別することで、同じ道路の上り方向と下り方向とを、それぞれ別のリンクとして管理することができる。
【0014】
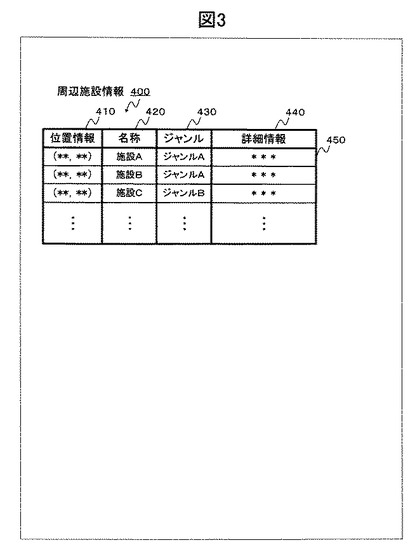
次に、周辺施設情報400の概略データ構造を図3に示す。周辺施設情報400は、施設の位置情報410ごとのレコード450からなる。各レコード450には、施設の位置情報410と、施設の名称420と、施設が属するジャンル430と、施設に関する詳細情報440と、が対応付けて格納されている。
【0015】
位置情報410は、施設の位置を特定するデータであり、例えば、(**,**)といった地図(地図データ310)上における位置を示す座標データである。
名称420は、施設の名称を示すデータであり、例えば、施設名、地名、住所、交差点名、道路名、等を表す文字列である。
ジャンル430は、施設が属するジャンルを示すデータであり、例えば、「飲食店」、「ガソリンスタンド」、「コンビニエンスストア」、等のデータである。
詳細情報440は、施設に関する詳細情報であり、ユーザにとって理解しやすい施設の説明等を示す文字列である。
【0016】
音声入出力装置4は、音声入力装置としてマイクロフォン41と、音声出力装置としてスピーカ42と、を備える。マイクロフォン41は、ユーザやその他の搭乗者から発された音声などの、車載器の外部の音声を取得する。スピーカ42は、演算処理部1で生成された音声信号を出力する。これらのマイクロフォン41とスピーカ42は、車両の所定の部位に、別個に配されている。
【0017】
入力装置5は、ユーザからの指示を受け付けるユニットである。入力装置5は、車載用ナビゲーション装置100の遠隔操作を可能にするリモコン51、ディスプレイ2の表示面に貼られた透過性のタッチパネル、その他のハードスイッチ(例えば、電源ボタン、スクロールキー、縮尺変更キー、等)、等で構成される。
【0018】
リモコン51は、一般的なナビゲーション装置に付属しているリモコンと同様に、各種指示を入力する機能を有してる。
【0019】
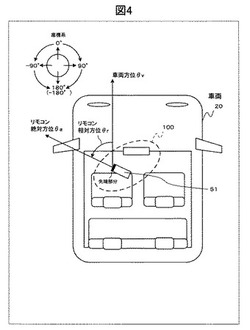
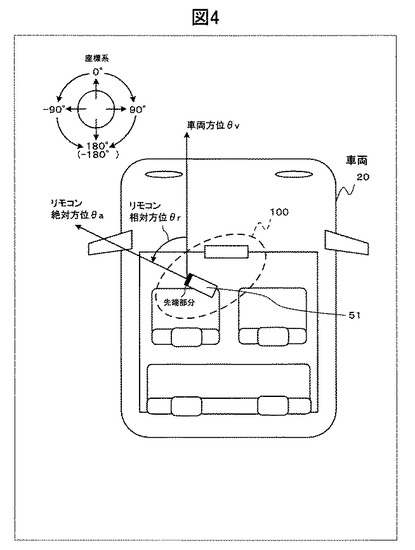
また、リモコン51は、所定のモードにおいて、リモコン51の先端部分を一方向に向けることにより、地図上の領域(以下では、「検索領域」とよぶ)を指定して、その検索領域に位置している施設を検索することができる。図4は、車両方位(車両20の進行方向)と、リモコン51の先端部分が向けられた方位と、の関係を示す図である。
【0020】
検索領域を指定する場合において、リモコン51は、車両方位θvに対する、リモコン51の先端部分が向けられている相対方位θrを求めるための信号(以下では、「相対方位検出信号」とよぶ)を、演算処理部1に入力する。この相対方位検出信号は、リモコン51に備わる所定のボタンが押されたときに出力される。ここで、演算処理部1は、入力された相対方位検出信号から、車両方位に対する、リモコン51の相対方位θrを求める。そして、後述するGPS受信装置8から取得したデータに基づいて車両方位(絶対方位)θvを求め、求めた車両方位θvに、先に求めた相対方位θrを合成して、リモコン51の絶対方位θaを算出する。
【0021】
図1に戻り、車速センサ6、ジャイロセンサ7、及び、GPS受信装置8は、車載用ナビゲーション装置100で現在地(自車位置)を検出するために使用される。車速センサ6は、車輪の円周と計測される車輪の回転数の積から距離を測定し、さらに対となる車輪の回転数の差から移動体が曲がった角度を計測する。ジャイロセンサ7は、光ファイバジャイロや振動ジャイロ等で構成され、移動体が回転した角度を検出するものである。GPS受信装置8は、GPS衛星からの信号を受信し、移動体とGPS衛星間の距離とその距離の変化率を3個以上の衛星に対して測定することで、移動体の現在位置、進行速度を測定する。
【0022】
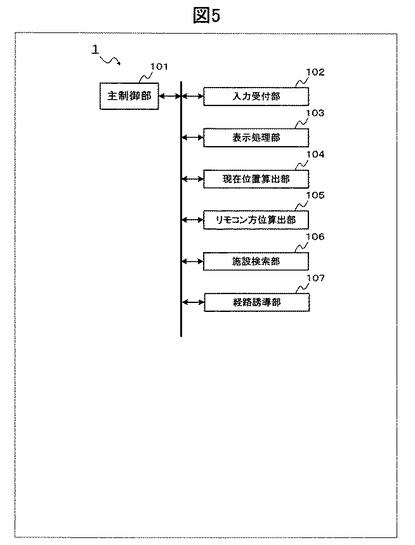
図5は、演算処理部1の機能ブロック図である。図示するように、演算処理部1は、主制御部101と、入力受付部102と、表示処理部103と、現在地算出部104と、リモコン方位算出部105と、施設検索部106と、経路誘導部107と、を有する。
【0023】
主制御部101は、演算処理部1の各部を統括して制御する処理を行う。
【0024】
入力受付部102は、入力装置5(リモコン51を含む)に入力されたユーザからの要求を受け付け、その要求内容を解析する。入力受付部102は、解析結果に応じたデータを主制御部101に通知する。例えば、入力受付部102は、車載用ナビゲーション装置100に電源を供給する要求、電源を切断する要求、施設の検索範囲(検索領域)を指定する要求、等を受け付け、主制御部101に通知する。また、入力受付部102は、車載用ナビゲーション装置100が有する各種機能の設定における入力データを受け付け、主制御部101に通知する。
【0025】
表示処理部103は、ディスプレイ2に、地図や、リモコン51の先端が向けられている絶対方位θaの方向等を表示させる。具体的には、表示処理部103は、ディスプレイ2に表示させるための描画コマンドを生成して通知する。なお、表示処理部103は、地図をディスプレイ2に表示させる際には、表示が要求された領域(例えば、車載用ナビゲーション装置100の現在位置付近の領域)にある地図データを記憶装置3から抽出し、指定された縮尺、描画方式で、道路、その他の地図構成物、現在位置、目的地、推奨経路のための矢印、リモコン51の絶対方位の方向を示す矢印といったマークを描画するように地図描画コマンドを生成する。また、表示処理部103は、ディスプレイ2に表示させた地図上に、自車両20の現在位置を示すカーマーク210や、各種設定画面や、推奨経路、等を表示させる。
【0026】
現在位置算出部104は、車載用ナビゲーション装置100の現在位置を算出する。具体的には、現在位置算出部104は、車速センサ6で計測される車両の進行速度(S5)およびジャイロセンサ7で計測される角加速度データ(S6)を各々積分した結果得られる距離データおよび角度データを用い、そのデータを時間軸で積分していくことにより、初期位置(X,Y)から自車走行後の位置である現在地(X’,Y’)を定期的に演算する。また、演算結果を用いて、マップマッチ処理することにより、形状の相関が最も高い道路(リンク)上に現在位置を合わせ込む。また、定期的にGPS受信装置8の出力(S7)を用いて現在位置を修正する。なお、車両が停止しているときには、GPS受信装置8の出力(S7)だけを用いて現在位置を求めてもよい。
【0027】
リモコン方位算出部105は、リモコン51の先端が向けられている絶対方位θaを算出する。絶対方位θaを算出する方法は、任意の方法でよいが、例えば、車両方位θvに対する、リモコン51の先端が向けられている相対方位θrを求め、求めた相対方位θrを、車両方位(絶対方位)θvに合成して、リモコン51の絶対方位θaを算出する。
【0028】
施設検索部106は、リモコン51の先端が向けられている絶対方位θaの方向に位置する施設を検索する。具体的には、施設検索部106は、現在位置からみて、リモコン方位算出部105が算出したリモコン51の絶対方位θaの方向に、施設の検索対象とする検索領域を求める。そして、求めた検索領域に位置する施設を、周辺施設情報400から検索する。
【0029】
経路誘導部107は、ダイクストラ法等を用いて、指定された2地点(現在地、目的地)間を結ぶ経路のコスト(例えば、距離や旅行時間)が最小となる経路を探索し、探索した経路(推奨経路)を用いて経路誘導を行う。指定する目的地は、施設検索部106が検索した施設(交差点や地名を含む)の中から選択される。また、経路誘導部107は、経路の情報と、現在位置の情報とを比較し、交差点等を通過する前に直進すべきか、右左折するべきかを、ディスプレイ2に表示させるとともに、音声入出力装置4を用いて音声でユーザに知らせる。また、経路誘導部107は、ディスプレイ2に表示された地図の範囲に含まれている推奨経路を表示する。このとき、経路誘導部107は、車両20の現在位置を示すカーマーク210を推奨経路上(例えば、画面中心)に表示する。
【0030】
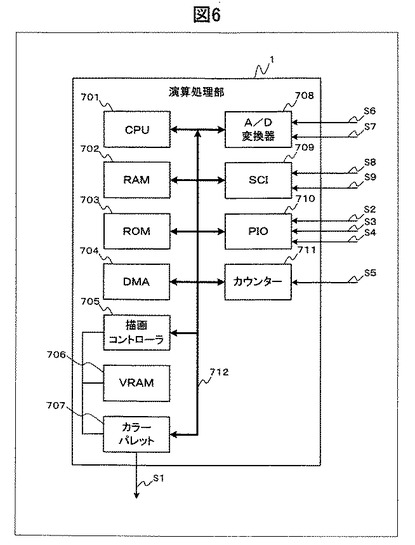
以上のような機能を有する演算処理部1は、例えば、図6に示すようなハードウェア構成で実現される。
【0031】
図示するように、演算処理部1は、各デバイス間をバス712で接続した構成としてある。演算処理部1は、数値演算及び各デバイスを制御するといった様々な処理を実行するCPU(Central Processing Unit)701と、記憶装置3から読み出した地図データ、演算データなどを一時的に格納するRAM(Random Access Memory)702と、プログラムやデータを格納するROM(Read Only Memory)703と、メモリ間及びメモリと各デバイスとの間のデータ転送を実行するDMA(Direct Memory Access)704と、グラフィックス描画を実行し且つ表示制御を行う描画コントローラ705と、グラフィックイメージデータを蓄積するVRAM(Video Random Access Memory)706と、イメージデータをRGB信号に変換するカラーパレット707と、アナログ信号をデジタル信号に変換するA/D変換器708と、シリアル信号をバス712に同期したパラレル信号に変換するSCI(Serial Communication Interface)709と、パラレル信号をバスに同期させてバス712にのせるPIO(Parallel Input/Output)710と、パルス信号を積分するカウンタ711と、を有する。
【0032】
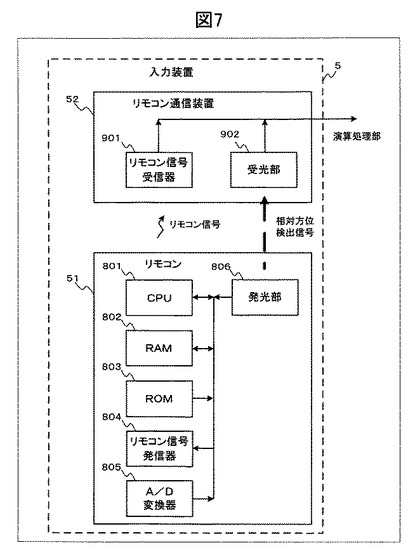
また、上述した入力装置5は、例えば、図7に示すようなハードウェア構成で実現される。
【0033】
図示するように、入力装置5は、リモコン51と、リモコン51から発信されたリモコン信号や相対方位信号を受信して演算処理部1に入力するリモコン通信装置52と、を含む。
【0034】
リモコン51は、数値演算及び各デバイスを制御するといった様々な処理を実行するCPU801と、演算データなどを一時的に格納するRAM802と、プログラムやデータを格納するROM803と、リモコン51の先端部分に設置され、リモコン信号を発信するリモコン信号発信器804と、ユーザが操作する入力ボタン(図示せず)に接続され、ユーザによる操作に応じて発生したアナログ信号をデジタル信号に変換するA/D変換器805と、相対方位検出信号(赤外線)を発光する赤外線LED等からなる発光部806と、を有する。
【0035】
リモコン通信装置52は、リモコン51から発信されたリモコン信号を受信するリモコン信号受信器901と、リモコン51から発光された相対方位検出信号(赤外線)を受光するイメージセンサ等からなる受光部902と、を有する。ここで、受光部902は、複数の受光部(例えば、4つの受光部)902からなり、いずれの受光部902が相対方位検出信号を受光したかに応じて、リモコン51の先端部分が向けられている相対方位θrを特定可能にする。
【0036】
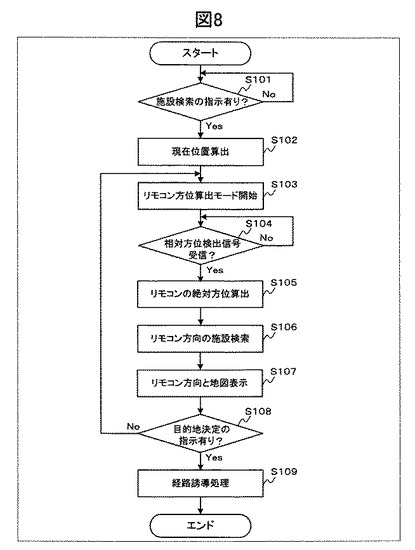
次に、上記構成からなる車載用ナビゲーション装置100の特徴的な動作について説明する。図8は、車載用ナビゲーション装置100の演算処理部1が行う施設の検索範囲指定処理を示すフローチャートである。
【0037】
演算処理部1の主制御部101は、入力受付部102を介して施設の検索範囲指定処理を開始する指示を受け付けるまで待機し(ステップS101;No)、指示を受け付けたときに(ステップS101;Yes)、施設の検索範囲指定処理を開始する。例えば、施設の検索範囲指定処理の開始を指示するためのボタンをメニュー画面(図示せず)上に表示しておき、そのボタンにタッチする操作がなされたときに施設の検索範囲指定処理を開始する。
【0038】
検索範囲指定処理を開始後、現在位置算出部104は、車載用ナビゲーション装置100の現在位置を算出する(ステップS102)。このとき、現在位置算出部104は、算出した現在位置をメモリ(例えば、RAM702)に記憶する。
【0039】
続いて、リモコン方位算出部105は、リモコン51の先端が向けられている絶対方位θaを求めるためのリモコン方位算出モードの処理を開始する(ステップS103)。そして、リモコン方位算出部105は、ステップS103でリモコン方位算出モードの処理を開始してから所定期間内に、リモコン51から発信された相対方位検出信号を受信するまで待機する(ステップS104;No)。所定期間内に、相対方位検出信号を受信した場合(ステップS104;Yes)、リモコン方位算出部105は、リモコン51の先端が向けられている絶対方位θaを算出する(ステップS105)。以下に、ステップS105において絶対方位を算出する処理手順について説明する。
【0040】
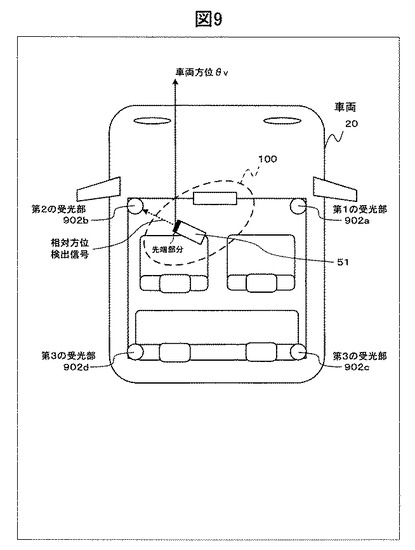
図9は、リモコン51の絶対方位を算出する処理手順を説明するための説明図である。
図示するように、車両20の車内の隅に、4つの受光部(第1の受光部902a、第2の受光部902b、第3の受光部902c、第4の受光部902d)が配置される。ユーザによって、リモコン51に備わる所定のボタンが押されたとき、リモコン51は、発光部806を介して、相対方位検出信号を出力する。このとき、リモコン方位算出部105は、いずれの受光部(902a〜d)で相対方位検出信号を受光したかによって、リモコン51の相対方位θrを求める。
【0041】
例えば、第1の受光部902aで相対方位検出信号を受光した場合には、リモコン方位算出部105は、リモコン51の相対方位θrを、45°とする。また、第2の受光部902b、第3の受光部902c、第4の受光部902dで、相対方位検出信号を受光した場合には、それぞれ、リモコン51の相対方位θrを、−45°、135°、−135°とする。このように、実際にユーザによって向けられたリモコン51の相対方位(以下では、「実際相対方位」とよぶ)が0°〜90°の範囲である場合には、相対方位θrを、代表値である45°に置き換えて求めることになる。このような置き換えを行っても、ユーザがリモコン51を指す方向というものは、そもそも、おおよその方向であるので、ユーザが求めている方向を検出することができる。同様に、実際相対方位が90°〜180°の範囲である場合には、相対方位θrを135°、実際相対方位が−90°〜0°の範囲である場合には、相対方位θrを−45°、実際相対方位が−180°〜−90°の範囲である場合には、相対方位θrを−135°といった代表値に置き換えて求める。
【0042】
次に、リモコン方位算出部105は、車両方位(絶対方位)θvを求める。具体的には、リモコン方位算出部105は、GPS受信装置8から連続して2つの現在位置を取得し、1回目に取得した現在位置を起点として、2回目に取得した現在位置の方位を求めることにより、車両方位(絶対方位)θvを求めることができる。
【0043】
続けて、リモコン方位算出部105は、車両方位に対する、リモコン51の相対方位θrを、車両方位(絶対方位)θvに合成して、リモコン51の先端が向けられている絶対方位θaを求める。
【0044】
以上のように、ステップS105において、リモコン方位算出部105は、リモコン51の先端が向けられている絶対方位θaを求めることができる。
【0045】
絶対方位θaを求めた後、リモコン方位算出部105は、リモコン方位算出モードの処理を終了する。
そして、施設検索部106は、リモコン51の先端が向けられている絶対方位θaの方向に位置する施設を検索する(ステップS106)。
【0046】
具体的には、施設検索部106は、最初に、ステップS102で現在位置算出部104が求めた現在位置を中心点とするおうぎ形の検索領域を求める。ここで、おうぎ形の検索領域は、中心角を、例えば、60°とし、半径を、例えば、1kmとする。そして、おうぎ形の検索領域は、中心角を2等分する直線が、ステップS105で求めたリモコン51の絶対方位θaに一致するように求められる。
【0047】
続いて、施設検索部106は、求めた検索領域に位置する施設を、周辺施設情報400から抽出する。このとき、ユーザによって検索する施設のジャンルが指定されていれば、検索領域に位置する施設の中から、指定されたジャンルに対応付けてられている施設のみを抽出する。
【0048】
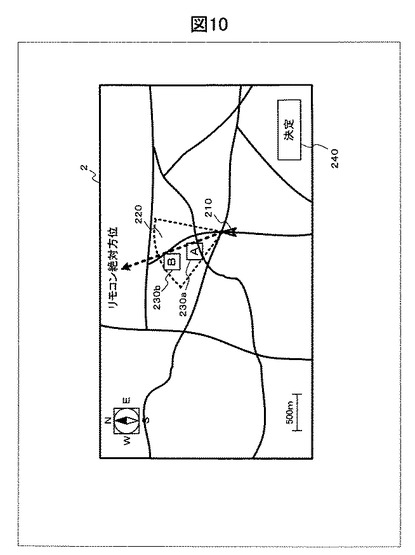
ステップS106での検索処理後、表示処理部103は、ディスプレイ2に、リモコンの先端が向けられている絶対方位θaと、地図と、を重ね合わせて表示する(ステップS107)。例えば、表示処理部103は、図10に示すような画面をディスプレイ2に表示する。図10は、現在位置周辺の地図と、カーマーク210と、ステップS205で求めた検索領域220と、検索領域220内に位置する施設(230a、230b)と、リモコン51の先端が向けられている方位θaと、をディスプレイ2に表示したときの画面例である。このように表示することにより、ユーザがリモコン51の先端を向けている絶対方位θaの方向に位置する施設の候補(一覧)を、ユーザに提供することができる。また、ユーザがリモコン51の先端を向けている絶対方位θaの地図上における方向を、現在位置とともに、ユーザに知らせることができるので、ユーザにとって、施設の候補からどの施設を選択すればよいか判断しやすい。
【0049】
ここで、経路誘導部107は、ディスプレイ2に表示された複数の施設(230a、230b)のうち、ユーザから選択された施設を、経路誘導部107が行う経路誘導の目的地とする。経路誘導部107は、施設(230a、230b)が表示されてから所定の期間内に、入力受付部(タッチパネル)102を介して、1つの施設(230a、230b)が選択され、画面に表示されている決定ボタン240がタッチされたか否かを判別する(ステップS108)。所定期間内に、決定ボタン240がタッチされた場合(ステップS108;Yes)、経路誘導部107は、選択された施設(230a、230b)を目的地に設定して、経路誘導処理を開始する(ステップS109)。一方、所定期間内に、決定ボタン240がタッチされなかった場合(ステップS108;No)、処理をステップS103に戻して、リモコン方位算出モードの処理を、再度、開始する。
【0050】
ステップS109において経路誘導処理を開始した後は、主制御部101は、検索範囲指定処理を終了する。
【0051】
以上の処理を、演算処理部1が行うことにより、ユーザがリモコン51の先端を向けている方向にある施設を検索することができる。
【0052】
以上、本発明の実施形態の一例について説明した。上記実施形態が適用された車載用ナビゲーション装置100によれば、ユーザにとって直感的に理解しやすい操作で、経路誘導の目的地に設定するための施設を検索することができる。
【0053】
なお、本発明は、上記実施形態に限定されず、種々の変形、応用が可能である。
【0054】
例えば、上記実施形態では、車両20の車内の隅に、4つの受光部(第1の受光部902a、第2の受光部902b、第3の受光部902c、第4の受光部902d)が配置される。しかしながら、これに限定されず、例えば、6個、8個、配置されてもよい。より多くの受光部902が車内に配置されるほど、リモコン51の先端部分が向けられている方位を、実際にユーザによって向けられている方位に近い値として検出することができる。
【0055】
また、上記実施形態では、表示処理部103は、検索された施設を、地図上の位置に対応させて表示している。しかしながら、これに限定されず、例えば、検索された施設(名称420)の一覧を表示するようにしてもよい。
【0056】
また、上記実施形態では、おうぎ形の検索領域220の中心角、及び、半径を、固定している。しかしながら、これに限定されず、リモコン51の先端が向けられている方向に応じて、検索領域220の中心角、半径を変動できるようにしてもよい。
【0057】
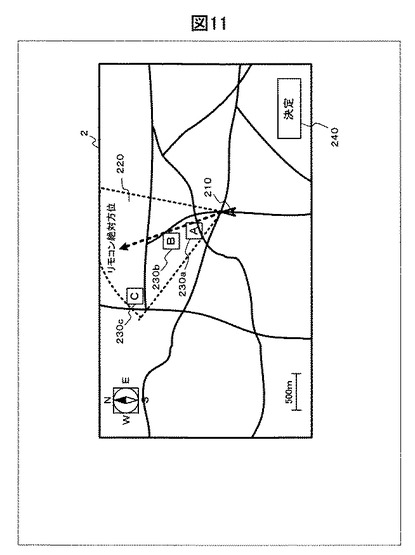
具体的には、リモコン51の先端が上方向(車両20の天井方向)に向けられたときには、検索領域220の半径を長くし、リモコン51の先端51が下方向(地面方向)に向けられたときには、検索領域220の半径を短くするようにしてもよい。また、リモコン51の先端が上方向に向けられたときには、ステップS107において、ディスプレイ2に表示する検索領域220の半径を長くして、図11に示すように表示する。図11は、おうぎ形の検索領域220の半径を長くして、ディスプレイ2に表示した場合の画面例である。また、検索領域220の半径を長くすると、検索領域220の面積は、現在位置から遠のく方向に大きくなる。そのため、標準の検索領域220から少し遠方に外れた位置にある施設230cを検索することができるようになる。
【0058】
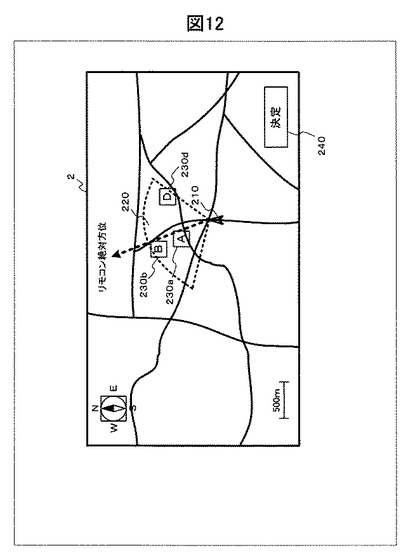
また、リモコン51の先端が左右方向に所定の速度以上の速度で振られるたびに、検索領域220の中心角を変動するようにしてもよい。すなわち、一度、リモコン51が左右方向に所定の速度以上の速度で振られると、検索領域220の中心角を広くし、再度、所定の速度以上の速度で振られると、検索領域220の中心角を狭くして標準の検索領域220に戻すようにする。また、検索領域220の中心角を広くするときには、表示処理部103は、検索領域220を、図12に示すように表示する。図12は、おうぎ形の検索領域220の中心角を広くして、ディスプレイ2に表示した場合の画面例である。また、検索領域220の中心角を広くすると、検索領域220の面積は、リモコン51の先端が向けられている絶対方位を中心として、左右方向に大きくなる。そのため、標準の検索領域220から少し左右方向に外れた位置にある施設230dを検索することができるようになる。
【0059】
また、上記実施形態では、検索領域220をおうぎ形としてる。しかしながら、この形状に限定されず、例えば、矩形、円形、といった形状でもよい。
【0060】
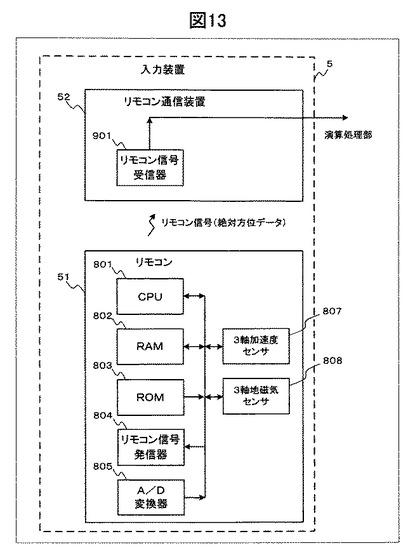
また、上記実施形態では、リモコン51の先端部分が向けられている絶対方位θaを算出する際に、リモコン方位算出部105が、車両方位θv、及び、リモコン51の先端が向けられている相対方位θrを求め、リモコン51の絶対方位θaを算出している。しかしながら、これに限定されず、リモコン51が、リモコン51の先端部分が向けられている絶対方位θaを求める機能を有するようにしてもよい。この場合、リモコン51は、例えば、図13に示すようなハードウェア構成で実現される。図示するように、リモコン51は、3軸加速度センサ807、3軸地磁気センサ808、等を備え、絶対方位θaを求める。そして、リモコン51は、求めた絶対方位θa(絶対方位データ)を、演算処理部1に入力する。
【0061】
上記の方法で、リモコン51の絶対方位θaを求める場合、ステップS105における処理では、まず、リモコン51のCPU801は、リモコン51に備わる特定のボタンが、ユーザによって押されたときに、3軸加速度センサ807、及び、3軸地磁気センサ808から取得したデータを用いて、リモコン51の先端が向けられている絶対方位θaを求める。
【0062】
続いて、リモコン51は、求めた絶対方位θaに対応するリモコン信号を出力する。このとき、リモコン方位算出部105は、リモコン通信装置52のリモコン信号受信器901を介して、そのリモコン信号を受信し、絶対方位θaを示すデータに変換する。
【0063】
これにより、リモコン方位算出部105は、リモコン51が求めた絶対方位データに基づいて、リモコン51の絶対方位θaを求めることができる。
【図面の簡単な説明】
【0064】
【図1】本発明の一実施形態が適用された車載用ナビゲーション装置の概略構成図である。
【図2】地図データの構成例を示す図である。
【図3】周辺施設情報の構成例を示す図である。
【図4】車両方位とリモコンが向けられた方位との関係を説明するための説明図である。
【図5】演算処理部の機能構成を示す図である。
【図6】演算処理部のハードウェア構成を示す図である。
【図7】リモコンの第1のハードウェア構成を示す図である。
【図8】検索範囲指定処理のフロー図である。
【図9】リモコンの絶対方位を算出する処理手順を説明するための説明図である。
【図10】施設の検索領域を表示する画面の画面表示例である。
【図11】半径が大きい施設の検索領域を表示する画面の画面表示例でる。
【図12】中心角が大きい施設の検索領域を表示する画面の画面表示例である。
【図13】リモコンの第2のハードウェア構成を示す図である。
【符号の説明】
【0065】
1・・・演算処理部、2・・・ディスプレイ、3・・・記憶装置、4・・・音声入出力装置、5・・・入力装置、6・・・車速センサ、7・・・ジャイロセンサ、8・・・GPS受信装置、20・・・車両、51・・・リモコン、52・・・リモコン通信装置、100・・・車載用ナビゲーション装置、101・・・主制御部、102・・・入力受付部、103・・・表示処理部、104・・・現在位置算出部、105・・・リモコン方位算出部、106・・・施設検索部、107・・・経路誘導部、210・・・カーマーク、220・・・検索領域、230(a〜d)・・・施設、240・・・決定ボタン、310・・・地図データ、400・・・周辺施設情報、410・・・位置情報、420・・・名称、430・・・ジャンル、701・・・CPU(演算処理部)、702・・・RAM(演算処理部)、801・・・CPU(リモコン)、802・・・RAM(リモコン)、803・・・ROM(リモコン)、804・・・リモコン信号発信器、805・・・A/D変換器、806・・・発光部、807・・・3軸加速度センサ、808・・・3軸地磁気センサ、901・・・リモコン信号受信器、902(a〜d)・・・受光部。
【技術分野】
【0001】
本発明は、ナビゲーション装置、および、リモートコントローラを用いた施設の検索方法に関する。
【背景技術】
【0002】
従来のナビゲーション装置は、ユーザによって指定されたジャンルに基づき自車位置周辺の施設を検索する施設検索機能を有している。例えば、特許文献1には、施設検索機能を有するナビゲーション装置において、施設の検索範囲を、車両方位に限定することについて記載されている。ここで、施設の検索範囲の指定は、タッチパネルにタッチする操作や、リモートコントローラ(以下では、「リモコン」とよぶ)に備えられたボタンを押す操作により行われる。
【特許文献1】特開2005−55259号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、目的の施設のおおよその方向を知っているユーザにとって、その施設を検索するために、ディスプレイに表示されている地図を見ながら、上述のような操作を行うことは、手間である。そして、自車位置周辺や、車両の進行方向にはない施設を検索するためには、さらに煩雑な操作を必要とする場合もある。
【0004】
本発明は、ナビゲーション装置において、ユーザにとって直感的に理解しやすい操作で、
施設を検索することができるようにする技術を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決するための本願発明のナビゲーション装置は、リモートコントローラからの入力を受け付けるナビゲーション装置であって、施設の位置情報を記憶している記憶手段と、前記リモートコントローラが向けられている絶対方位を算出する絶対方位算出手段と、現在位置を算出する現在位置算出手段と、前記現在位置から前記絶対方位が示す方向の所定の検索領域に位置する施設を、前記記憶手段から検索する施設検索手段と、検索した施設を表示する表示手段と、を備える。
【発明の効果】
【0006】
本発明のナビゲーション装置によれば、ユーザにとって直感的に理解しやすい操作で、
施設の検索を行うことができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の実施形態の一例を図面を参照して説明する。
【0008】
図1は、本発明の一実施形態が適用された車載用ナビゲーション装置100の概略構成図である。図示するように、車載用ナビゲーション装置100は、演算処理部1と、ディスプレイ2と、記憶装置3と、音声入出力装置4と、入力装置5と、車速センサ6と、ジャイロセンサ7と、GPS受信装置8と、を備えている。
【0009】
演算処理部1は、様々な処理を行う中心的ユニットである。例えば、各種センサ(6、7)やGPS受信装置8から出力される情報を基にして現在地を検出する。また、得られた現在地情報に基づいて、表示に必要な地図データを記憶装置3から読み出す。また、読み出した地図データをグラフィック展開し、そこに現在地を示すマークを重ねてディスプレイ2に表示する。また、記憶装置3に記憶されている地図データを用いて、ユーザから指示された出発地(現在地)と目的地とを結ぶ最適な経路(推奨経路)を探索する。また、音声入出力装置4やディスプレイ2を用いてユーザを誘導する。
また、演算処理部1は、後述するリモコン51の先端部分が向けられている絶対方位を算出する。絶対方位を算出する具体的な方法については、後述する。
【0010】
ディスプレイ2は、演算処理部1で生成されたグラフィックス情報を表示するユニットである。ディスプレイ2は、液晶ディスプレイや有機EL(Electro-Luminescence)ディスプレイなどで構成される。
【0011】
記憶装置3は、CD−ROMやDVD−ROMやHDDやICカードといった記憶媒体で構成されている。この記憶媒体には、例えば、地図データ310、周辺施設情報400等が記憶されている。
【0012】
地図データ310の概略データ構造を図2に示す。地図データ310は、地図上の区画された領域であるメッシュの識別コード(メッシュID)311ごとに、そのメッシュ領域に含まれている道路を構成する各リンクのリンクデータ320を含んでいる。
【0013】
リンクデータ320は、リンクの識別コード(リンクID)321ごとに、リンクを構成する2つのノード(開始ノード、終了ノード)の座標情報322、リンクを含む道路の種別情報323、リンクの長さを示すリンク長情報324、リンク旅行時間325、2つのノードにそれぞれ接続するリンクの識別コード(接続リンクID)326、リンク周辺に位置する施設の識別コード(周辺施設ID)327、などを含んでいる。なお、ここでは、リンクを構成する2つのノードについて開始ノードと終了ノードとを区別することで、同じ道路の上り方向と下り方向とを、それぞれ別のリンクとして管理することができる。
【0014】
次に、周辺施設情報400の概略データ構造を図3に示す。周辺施設情報400は、施設の位置情報410ごとのレコード450からなる。各レコード450には、施設の位置情報410と、施設の名称420と、施設が属するジャンル430と、施設に関する詳細情報440と、が対応付けて格納されている。
【0015】
位置情報410は、施設の位置を特定するデータであり、例えば、(**,**)といった地図(地図データ310)上における位置を示す座標データである。
名称420は、施設の名称を示すデータであり、例えば、施設名、地名、住所、交差点名、道路名、等を表す文字列である。
ジャンル430は、施設が属するジャンルを示すデータであり、例えば、「飲食店」、「ガソリンスタンド」、「コンビニエンスストア」、等のデータである。
詳細情報440は、施設に関する詳細情報であり、ユーザにとって理解しやすい施設の説明等を示す文字列である。
【0016】
音声入出力装置4は、音声入力装置としてマイクロフォン41と、音声出力装置としてスピーカ42と、を備える。マイクロフォン41は、ユーザやその他の搭乗者から発された音声などの、車載器の外部の音声を取得する。スピーカ42は、演算処理部1で生成された音声信号を出力する。これらのマイクロフォン41とスピーカ42は、車両の所定の部位に、別個に配されている。
【0017】
入力装置5は、ユーザからの指示を受け付けるユニットである。入力装置5は、車載用ナビゲーション装置100の遠隔操作を可能にするリモコン51、ディスプレイ2の表示面に貼られた透過性のタッチパネル、その他のハードスイッチ(例えば、電源ボタン、スクロールキー、縮尺変更キー、等)、等で構成される。
【0018】
リモコン51は、一般的なナビゲーション装置に付属しているリモコンと同様に、各種指示を入力する機能を有してる。
【0019】
また、リモコン51は、所定のモードにおいて、リモコン51の先端部分を一方向に向けることにより、地図上の領域(以下では、「検索領域」とよぶ)を指定して、その検索領域に位置している施設を検索することができる。図4は、車両方位(車両20の進行方向)と、リモコン51の先端部分が向けられた方位と、の関係を示す図である。
【0020】
検索領域を指定する場合において、リモコン51は、車両方位θvに対する、リモコン51の先端部分が向けられている相対方位θrを求めるための信号(以下では、「相対方位検出信号」とよぶ)を、演算処理部1に入力する。この相対方位検出信号は、リモコン51に備わる所定のボタンが押されたときに出力される。ここで、演算処理部1は、入力された相対方位検出信号から、車両方位に対する、リモコン51の相対方位θrを求める。そして、後述するGPS受信装置8から取得したデータに基づいて車両方位(絶対方位)θvを求め、求めた車両方位θvに、先に求めた相対方位θrを合成して、リモコン51の絶対方位θaを算出する。
【0021】
図1に戻り、車速センサ6、ジャイロセンサ7、及び、GPS受信装置8は、車載用ナビゲーション装置100で現在地(自車位置)を検出するために使用される。車速センサ6は、車輪の円周と計測される車輪の回転数の積から距離を測定し、さらに対となる車輪の回転数の差から移動体が曲がった角度を計測する。ジャイロセンサ7は、光ファイバジャイロや振動ジャイロ等で構成され、移動体が回転した角度を検出するものである。GPS受信装置8は、GPS衛星からの信号を受信し、移動体とGPS衛星間の距離とその距離の変化率を3個以上の衛星に対して測定することで、移動体の現在位置、進行速度を測定する。
【0022】
図5は、演算処理部1の機能ブロック図である。図示するように、演算処理部1は、主制御部101と、入力受付部102と、表示処理部103と、現在地算出部104と、リモコン方位算出部105と、施設検索部106と、経路誘導部107と、を有する。
【0023】
主制御部101は、演算処理部1の各部を統括して制御する処理を行う。
【0024】
入力受付部102は、入力装置5(リモコン51を含む)に入力されたユーザからの要求を受け付け、その要求内容を解析する。入力受付部102は、解析結果に応じたデータを主制御部101に通知する。例えば、入力受付部102は、車載用ナビゲーション装置100に電源を供給する要求、電源を切断する要求、施設の検索範囲(検索領域)を指定する要求、等を受け付け、主制御部101に通知する。また、入力受付部102は、車載用ナビゲーション装置100が有する各種機能の設定における入力データを受け付け、主制御部101に通知する。
【0025】
表示処理部103は、ディスプレイ2に、地図や、リモコン51の先端が向けられている絶対方位θaの方向等を表示させる。具体的には、表示処理部103は、ディスプレイ2に表示させるための描画コマンドを生成して通知する。なお、表示処理部103は、地図をディスプレイ2に表示させる際には、表示が要求された領域(例えば、車載用ナビゲーション装置100の現在位置付近の領域)にある地図データを記憶装置3から抽出し、指定された縮尺、描画方式で、道路、その他の地図構成物、現在位置、目的地、推奨経路のための矢印、リモコン51の絶対方位の方向を示す矢印といったマークを描画するように地図描画コマンドを生成する。また、表示処理部103は、ディスプレイ2に表示させた地図上に、自車両20の現在位置を示すカーマーク210や、各種設定画面や、推奨経路、等を表示させる。
【0026】
現在位置算出部104は、車載用ナビゲーション装置100の現在位置を算出する。具体的には、現在位置算出部104は、車速センサ6で計測される車両の進行速度(S5)およびジャイロセンサ7で計測される角加速度データ(S6)を各々積分した結果得られる距離データおよび角度データを用い、そのデータを時間軸で積分していくことにより、初期位置(X,Y)から自車走行後の位置である現在地(X’,Y’)を定期的に演算する。また、演算結果を用いて、マップマッチ処理することにより、形状の相関が最も高い道路(リンク)上に現在位置を合わせ込む。また、定期的にGPS受信装置8の出力(S7)を用いて現在位置を修正する。なお、車両が停止しているときには、GPS受信装置8の出力(S7)だけを用いて現在位置を求めてもよい。
【0027】
リモコン方位算出部105は、リモコン51の先端が向けられている絶対方位θaを算出する。絶対方位θaを算出する方法は、任意の方法でよいが、例えば、車両方位θvに対する、リモコン51の先端が向けられている相対方位θrを求め、求めた相対方位θrを、車両方位(絶対方位)θvに合成して、リモコン51の絶対方位θaを算出する。
【0028】
施設検索部106は、リモコン51の先端が向けられている絶対方位θaの方向に位置する施設を検索する。具体的には、施設検索部106は、現在位置からみて、リモコン方位算出部105が算出したリモコン51の絶対方位θaの方向に、施設の検索対象とする検索領域を求める。そして、求めた検索領域に位置する施設を、周辺施設情報400から検索する。
【0029】
経路誘導部107は、ダイクストラ法等を用いて、指定された2地点(現在地、目的地)間を結ぶ経路のコスト(例えば、距離や旅行時間)が最小となる経路を探索し、探索した経路(推奨経路)を用いて経路誘導を行う。指定する目的地は、施設検索部106が検索した施設(交差点や地名を含む)の中から選択される。また、経路誘導部107は、経路の情報と、現在位置の情報とを比較し、交差点等を通過する前に直進すべきか、右左折するべきかを、ディスプレイ2に表示させるとともに、音声入出力装置4を用いて音声でユーザに知らせる。また、経路誘導部107は、ディスプレイ2に表示された地図の範囲に含まれている推奨経路を表示する。このとき、経路誘導部107は、車両20の現在位置を示すカーマーク210を推奨経路上(例えば、画面中心)に表示する。
【0030】
以上のような機能を有する演算処理部1は、例えば、図6に示すようなハードウェア構成で実現される。
【0031】
図示するように、演算処理部1は、各デバイス間をバス712で接続した構成としてある。演算処理部1は、数値演算及び各デバイスを制御するといった様々な処理を実行するCPU(Central Processing Unit)701と、記憶装置3から読み出した地図データ、演算データなどを一時的に格納するRAM(Random Access Memory)702と、プログラムやデータを格納するROM(Read Only Memory)703と、メモリ間及びメモリと各デバイスとの間のデータ転送を実行するDMA(Direct Memory Access)704と、グラフィックス描画を実行し且つ表示制御を行う描画コントローラ705と、グラフィックイメージデータを蓄積するVRAM(Video Random Access Memory)706と、イメージデータをRGB信号に変換するカラーパレット707と、アナログ信号をデジタル信号に変換するA/D変換器708と、シリアル信号をバス712に同期したパラレル信号に変換するSCI(Serial Communication Interface)709と、パラレル信号をバスに同期させてバス712にのせるPIO(Parallel Input/Output)710と、パルス信号を積分するカウンタ711と、を有する。
【0032】
また、上述した入力装置5は、例えば、図7に示すようなハードウェア構成で実現される。
【0033】
図示するように、入力装置5は、リモコン51と、リモコン51から発信されたリモコン信号や相対方位信号を受信して演算処理部1に入力するリモコン通信装置52と、を含む。
【0034】
リモコン51は、数値演算及び各デバイスを制御するといった様々な処理を実行するCPU801と、演算データなどを一時的に格納するRAM802と、プログラムやデータを格納するROM803と、リモコン51の先端部分に設置され、リモコン信号を発信するリモコン信号発信器804と、ユーザが操作する入力ボタン(図示せず)に接続され、ユーザによる操作に応じて発生したアナログ信号をデジタル信号に変換するA/D変換器805と、相対方位検出信号(赤外線)を発光する赤外線LED等からなる発光部806と、を有する。
【0035】
リモコン通信装置52は、リモコン51から発信されたリモコン信号を受信するリモコン信号受信器901と、リモコン51から発光された相対方位検出信号(赤外線)を受光するイメージセンサ等からなる受光部902と、を有する。ここで、受光部902は、複数の受光部(例えば、4つの受光部)902からなり、いずれの受光部902が相対方位検出信号を受光したかに応じて、リモコン51の先端部分が向けられている相対方位θrを特定可能にする。
【0036】
次に、上記構成からなる車載用ナビゲーション装置100の特徴的な動作について説明する。図8は、車載用ナビゲーション装置100の演算処理部1が行う施設の検索範囲指定処理を示すフローチャートである。
【0037】
演算処理部1の主制御部101は、入力受付部102を介して施設の検索範囲指定処理を開始する指示を受け付けるまで待機し(ステップS101;No)、指示を受け付けたときに(ステップS101;Yes)、施設の検索範囲指定処理を開始する。例えば、施設の検索範囲指定処理の開始を指示するためのボタンをメニュー画面(図示せず)上に表示しておき、そのボタンにタッチする操作がなされたときに施設の検索範囲指定処理を開始する。
【0038】
検索範囲指定処理を開始後、現在位置算出部104は、車載用ナビゲーション装置100の現在位置を算出する(ステップS102)。このとき、現在位置算出部104は、算出した現在位置をメモリ(例えば、RAM702)に記憶する。
【0039】
続いて、リモコン方位算出部105は、リモコン51の先端が向けられている絶対方位θaを求めるためのリモコン方位算出モードの処理を開始する(ステップS103)。そして、リモコン方位算出部105は、ステップS103でリモコン方位算出モードの処理を開始してから所定期間内に、リモコン51から発信された相対方位検出信号を受信するまで待機する(ステップS104;No)。所定期間内に、相対方位検出信号を受信した場合(ステップS104;Yes)、リモコン方位算出部105は、リモコン51の先端が向けられている絶対方位θaを算出する(ステップS105)。以下に、ステップS105において絶対方位を算出する処理手順について説明する。
【0040】
図9は、リモコン51の絶対方位を算出する処理手順を説明するための説明図である。
図示するように、車両20の車内の隅に、4つの受光部(第1の受光部902a、第2の受光部902b、第3の受光部902c、第4の受光部902d)が配置される。ユーザによって、リモコン51に備わる所定のボタンが押されたとき、リモコン51は、発光部806を介して、相対方位検出信号を出力する。このとき、リモコン方位算出部105は、いずれの受光部(902a〜d)で相対方位検出信号を受光したかによって、リモコン51の相対方位θrを求める。
【0041】
例えば、第1の受光部902aで相対方位検出信号を受光した場合には、リモコン方位算出部105は、リモコン51の相対方位θrを、45°とする。また、第2の受光部902b、第3の受光部902c、第4の受光部902dで、相対方位検出信号を受光した場合には、それぞれ、リモコン51の相対方位θrを、−45°、135°、−135°とする。このように、実際にユーザによって向けられたリモコン51の相対方位(以下では、「実際相対方位」とよぶ)が0°〜90°の範囲である場合には、相対方位θrを、代表値である45°に置き換えて求めることになる。このような置き換えを行っても、ユーザがリモコン51を指す方向というものは、そもそも、おおよその方向であるので、ユーザが求めている方向を検出することができる。同様に、実際相対方位が90°〜180°の範囲である場合には、相対方位θrを135°、実際相対方位が−90°〜0°の範囲である場合には、相対方位θrを−45°、実際相対方位が−180°〜−90°の範囲である場合には、相対方位θrを−135°といった代表値に置き換えて求める。
【0042】
次に、リモコン方位算出部105は、車両方位(絶対方位)θvを求める。具体的には、リモコン方位算出部105は、GPS受信装置8から連続して2つの現在位置を取得し、1回目に取得した現在位置を起点として、2回目に取得した現在位置の方位を求めることにより、車両方位(絶対方位)θvを求めることができる。
【0043】
続けて、リモコン方位算出部105は、車両方位に対する、リモコン51の相対方位θrを、車両方位(絶対方位)θvに合成して、リモコン51の先端が向けられている絶対方位θaを求める。
【0044】
以上のように、ステップS105において、リモコン方位算出部105は、リモコン51の先端が向けられている絶対方位θaを求めることができる。
【0045】
絶対方位θaを求めた後、リモコン方位算出部105は、リモコン方位算出モードの処理を終了する。
そして、施設検索部106は、リモコン51の先端が向けられている絶対方位θaの方向に位置する施設を検索する(ステップS106)。
【0046】
具体的には、施設検索部106は、最初に、ステップS102で現在位置算出部104が求めた現在位置を中心点とするおうぎ形の検索領域を求める。ここで、おうぎ形の検索領域は、中心角を、例えば、60°とし、半径を、例えば、1kmとする。そして、おうぎ形の検索領域は、中心角を2等分する直線が、ステップS105で求めたリモコン51の絶対方位θaに一致するように求められる。
【0047】
続いて、施設検索部106は、求めた検索領域に位置する施設を、周辺施設情報400から抽出する。このとき、ユーザによって検索する施設のジャンルが指定されていれば、検索領域に位置する施設の中から、指定されたジャンルに対応付けてられている施設のみを抽出する。
【0048】
ステップS106での検索処理後、表示処理部103は、ディスプレイ2に、リモコンの先端が向けられている絶対方位θaと、地図と、を重ね合わせて表示する(ステップS107)。例えば、表示処理部103は、図10に示すような画面をディスプレイ2に表示する。図10は、現在位置周辺の地図と、カーマーク210と、ステップS205で求めた検索領域220と、検索領域220内に位置する施設(230a、230b)と、リモコン51の先端が向けられている方位θaと、をディスプレイ2に表示したときの画面例である。このように表示することにより、ユーザがリモコン51の先端を向けている絶対方位θaの方向に位置する施設の候補(一覧)を、ユーザに提供することができる。また、ユーザがリモコン51の先端を向けている絶対方位θaの地図上における方向を、現在位置とともに、ユーザに知らせることができるので、ユーザにとって、施設の候補からどの施設を選択すればよいか判断しやすい。
【0049】
ここで、経路誘導部107は、ディスプレイ2に表示された複数の施設(230a、230b)のうち、ユーザから選択された施設を、経路誘導部107が行う経路誘導の目的地とする。経路誘導部107は、施設(230a、230b)が表示されてから所定の期間内に、入力受付部(タッチパネル)102を介して、1つの施設(230a、230b)が選択され、画面に表示されている決定ボタン240がタッチされたか否かを判別する(ステップS108)。所定期間内に、決定ボタン240がタッチされた場合(ステップS108;Yes)、経路誘導部107は、選択された施設(230a、230b)を目的地に設定して、経路誘導処理を開始する(ステップS109)。一方、所定期間内に、決定ボタン240がタッチされなかった場合(ステップS108;No)、処理をステップS103に戻して、リモコン方位算出モードの処理を、再度、開始する。
【0050】
ステップS109において経路誘導処理を開始した後は、主制御部101は、検索範囲指定処理を終了する。
【0051】
以上の処理を、演算処理部1が行うことにより、ユーザがリモコン51の先端を向けている方向にある施設を検索することができる。
【0052】
以上、本発明の実施形態の一例について説明した。上記実施形態が適用された車載用ナビゲーション装置100によれば、ユーザにとって直感的に理解しやすい操作で、経路誘導の目的地に設定するための施設を検索することができる。
【0053】
なお、本発明は、上記実施形態に限定されず、種々の変形、応用が可能である。
【0054】
例えば、上記実施形態では、車両20の車内の隅に、4つの受光部(第1の受光部902a、第2の受光部902b、第3の受光部902c、第4の受光部902d)が配置される。しかしながら、これに限定されず、例えば、6個、8個、配置されてもよい。より多くの受光部902が車内に配置されるほど、リモコン51の先端部分が向けられている方位を、実際にユーザによって向けられている方位に近い値として検出することができる。
【0055】
また、上記実施形態では、表示処理部103は、検索された施設を、地図上の位置に対応させて表示している。しかしながら、これに限定されず、例えば、検索された施設(名称420)の一覧を表示するようにしてもよい。
【0056】
また、上記実施形態では、おうぎ形の検索領域220の中心角、及び、半径を、固定している。しかしながら、これに限定されず、リモコン51の先端が向けられている方向に応じて、検索領域220の中心角、半径を変動できるようにしてもよい。
【0057】
具体的には、リモコン51の先端が上方向(車両20の天井方向)に向けられたときには、検索領域220の半径を長くし、リモコン51の先端51が下方向(地面方向)に向けられたときには、検索領域220の半径を短くするようにしてもよい。また、リモコン51の先端が上方向に向けられたときには、ステップS107において、ディスプレイ2に表示する検索領域220の半径を長くして、図11に示すように表示する。図11は、おうぎ形の検索領域220の半径を長くして、ディスプレイ2に表示した場合の画面例である。また、検索領域220の半径を長くすると、検索領域220の面積は、現在位置から遠のく方向に大きくなる。そのため、標準の検索領域220から少し遠方に外れた位置にある施設230cを検索することができるようになる。
【0058】
また、リモコン51の先端が左右方向に所定の速度以上の速度で振られるたびに、検索領域220の中心角を変動するようにしてもよい。すなわち、一度、リモコン51が左右方向に所定の速度以上の速度で振られると、検索領域220の中心角を広くし、再度、所定の速度以上の速度で振られると、検索領域220の中心角を狭くして標準の検索領域220に戻すようにする。また、検索領域220の中心角を広くするときには、表示処理部103は、検索領域220を、図12に示すように表示する。図12は、おうぎ形の検索領域220の中心角を広くして、ディスプレイ2に表示した場合の画面例である。また、検索領域220の中心角を広くすると、検索領域220の面積は、リモコン51の先端が向けられている絶対方位を中心として、左右方向に大きくなる。そのため、標準の検索領域220から少し左右方向に外れた位置にある施設230dを検索することができるようになる。
【0059】
また、上記実施形態では、検索領域220をおうぎ形としてる。しかしながら、この形状に限定されず、例えば、矩形、円形、といった形状でもよい。
【0060】
また、上記実施形態では、リモコン51の先端部分が向けられている絶対方位θaを算出する際に、リモコン方位算出部105が、車両方位θv、及び、リモコン51の先端が向けられている相対方位θrを求め、リモコン51の絶対方位θaを算出している。しかしながら、これに限定されず、リモコン51が、リモコン51の先端部分が向けられている絶対方位θaを求める機能を有するようにしてもよい。この場合、リモコン51は、例えば、図13に示すようなハードウェア構成で実現される。図示するように、リモコン51は、3軸加速度センサ807、3軸地磁気センサ808、等を備え、絶対方位θaを求める。そして、リモコン51は、求めた絶対方位θa(絶対方位データ)を、演算処理部1に入力する。
【0061】
上記の方法で、リモコン51の絶対方位θaを求める場合、ステップS105における処理では、まず、リモコン51のCPU801は、リモコン51に備わる特定のボタンが、ユーザによって押されたときに、3軸加速度センサ807、及び、3軸地磁気センサ808から取得したデータを用いて、リモコン51の先端が向けられている絶対方位θaを求める。
【0062】
続いて、リモコン51は、求めた絶対方位θaに対応するリモコン信号を出力する。このとき、リモコン方位算出部105は、リモコン通信装置52のリモコン信号受信器901を介して、そのリモコン信号を受信し、絶対方位θaを示すデータに変換する。
【0063】
これにより、リモコン方位算出部105は、リモコン51が求めた絶対方位データに基づいて、リモコン51の絶対方位θaを求めることができる。
【図面の簡単な説明】
【0064】
【図1】本発明の一実施形態が適用された車載用ナビゲーション装置の概略構成図である。
【図2】地図データの構成例を示す図である。
【図3】周辺施設情報の構成例を示す図である。
【図4】車両方位とリモコンが向けられた方位との関係を説明するための説明図である。
【図5】演算処理部の機能構成を示す図である。
【図6】演算処理部のハードウェア構成を示す図である。
【図7】リモコンの第1のハードウェア構成を示す図である。
【図8】検索範囲指定処理のフロー図である。
【図9】リモコンの絶対方位を算出する処理手順を説明するための説明図である。
【図10】施設の検索領域を表示する画面の画面表示例である。
【図11】半径が大きい施設の検索領域を表示する画面の画面表示例でる。
【図12】中心角が大きい施設の検索領域を表示する画面の画面表示例である。
【図13】リモコンの第2のハードウェア構成を示す図である。
【符号の説明】
【0065】
1・・・演算処理部、2・・・ディスプレイ、3・・・記憶装置、4・・・音声入出力装置、5・・・入力装置、6・・・車速センサ、7・・・ジャイロセンサ、8・・・GPS受信装置、20・・・車両、51・・・リモコン、52・・・リモコン通信装置、100・・・車載用ナビゲーション装置、101・・・主制御部、102・・・入力受付部、103・・・表示処理部、104・・・現在位置算出部、105・・・リモコン方位算出部、106・・・施設検索部、107・・・経路誘導部、210・・・カーマーク、220・・・検索領域、230(a〜d)・・・施設、240・・・決定ボタン、310・・・地図データ、400・・・周辺施設情報、410・・・位置情報、420・・・名称、430・・・ジャンル、701・・・CPU(演算処理部)、702・・・RAM(演算処理部)、801・・・CPU(リモコン)、802・・・RAM(リモコン)、803・・・ROM(リモコン)、804・・・リモコン信号発信器、805・・・A/D変換器、806・・・発光部、807・・・3軸加速度センサ、808・・・3軸地磁気センサ、901・・・リモコン信号受信器、902(a〜d)・・・受光部。
【特許請求の範囲】
【請求項1】
リモートコントローラからの入力を受け付けるナビゲーション装置であって、
施設の位置情報を記憶している記憶手段と、
前記リモートコントローラが向けられている絶対方位を算出する絶対方位算出手段と、
現在位置を算出する現在位置算出手段と、
前記現在位置から前記絶対方位が示す方向の所定の検索領域に位置する施設を、前記記憶手段から検索する施設検索手段と、
検索した施設を表示する表示手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置であって、
前記絶対方位算出手段は、
車両が向いている方位を求める車両方位算出手段と、
前記車両が向いている方位に対して、前記リモートコントローラが向けられている相対方位を特定する相対方位データを、前記リモートコントローラから受信する相対方位受信手段と、
受信した前記相対方位データに対応する前記相対方位を算出する相対方位算出手段と、
前記車両方位に前記相対方位を合成して、前記絶対方位を算出する合成手段と、を備える、
ことを特徴とするナビゲーション装置。
【請求項3】
請求項1に記載のナビゲーション装置であって、
前記絶対方位算出手段は、
前記リモートコントローラが向けられている絶対方位を特定する絶対方位データを、前記リモートコントローラから受信する絶対方位受信手段、を備え、
受信した前記絶対方位データに基づいて、前記絶対方位を算出する、
ことを特徴とするナビゲーション装置。
【請求項4】
請求項1乃至3のいずれか1項に記載のナビゲーション装置であって、
前記施設検索手段は、
施設が属するジャンルの指定を受け付け、
指定されたジャンルに属する施設のうち、前記絶対方位が示す方向の所定の検索領域に位置する施設を検索する、
ことを特徴とするナビゲーション装置。
【請求項5】
請求項1乃至4のいずれか1項に記載のナビゲーション装置であって、
前記所定領域は、前記現在位置を中心点とし、所定の中心角、所定の半径のおうぎ形である、
ことを特徴とするナビゲーション装置。
【請求項6】
請求項5に記載のナビゲーション装置であって、
前記リモートコントローラが向けられた方向に応じて、前記検索領域の前記半径を変更する、
ことを特徴とするナビゲーション装置。
【請求項7】
請求項5に記載のナビゲーション装置であって、
前記リモートコントローラが向けられる方位の変位速度に応じて、前記検索領域の前記中心角を変更する、
ことを特徴とするナビゲーション装置。
【請求項8】
請求項1乃至8のいずれか1項に記載のナビゲーション装置であって、
前記表示手段が表示した施設の中から、1つの施設を選択する指示を受け付ける選択受付手段と、
選択された前記施設を目的地として経路誘導する経路誘導手段と、
を備えることを特徴とするナビゲーション装置。
【請求項9】
ナビゲーション装置におけるリモートコントローラを用いた施設検索方法であって、
施設の位置情報を記憶している記憶部と、制御部と、を有し、
前記制御部は、
前記リモートコントローラが向けられている絶対方位を算出する絶対方位算出ステップと、
現在位置を算出する現在位置算出ステップと、
前記現在位置から前記絶対方位が示す方向の所定の検索領域に位置する施設を、前記記憶部から検索する施設検索ステップと、
検索した施設を表示する表示ステップと、
を行うことを特徴とする施設検索方法。
【請求項1】
リモートコントローラからの入力を受け付けるナビゲーション装置であって、
施設の位置情報を記憶している記憶手段と、
前記リモートコントローラが向けられている絶対方位を算出する絶対方位算出手段と、
現在位置を算出する現在位置算出手段と、
前記現在位置から前記絶対方位が示す方向の所定の検索領域に位置する施設を、前記記憶手段から検索する施設検索手段と、
検索した施設を表示する表示手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置であって、
前記絶対方位算出手段は、
車両が向いている方位を求める車両方位算出手段と、
前記車両が向いている方位に対して、前記リモートコントローラが向けられている相対方位を特定する相対方位データを、前記リモートコントローラから受信する相対方位受信手段と、
受信した前記相対方位データに対応する前記相対方位を算出する相対方位算出手段と、
前記車両方位に前記相対方位を合成して、前記絶対方位を算出する合成手段と、を備える、
ことを特徴とするナビゲーション装置。
【請求項3】
請求項1に記載のナビゲーション装置であって、
前記絶対方位算出手段は、
前記リモートコントローラが向けられている絶対方位を特定する絶対方位データを、前記リモートコントローラから受信する絶対方位受信手段、を備え、
受信した前記絶対方位データに基づいて、前記絶対方位を算出する、
ことを特徴とするナビゲーション装置。
【請求項4】
請求項1乃至3のいずれか1項に記載のナビゲーション装置であって、
前記施設検索手段は、
施設が属するジャンルの指定を受け付け、
指定されたジャンルに属する施設のうち、前記絶対方位が示す方向の所定の検索領域に位置する施設を検索する、
ことを特徴とするナビゲーション装置。
【請求項5】
請求項1乃至4のいずれか1項に記載のナビゲーション装置であって、
前記所定領域は、前記現在位置を中心点とし、所定の中心角、所定の半径のおうぎ形である、
ことを特徴とするナビゲーション装置。
【請求項6】
請求項5に記載のナビゲーション装置であって、
前記リモートコントローラが向けられた方向に応じて、前記検索領域の前記半径を変更する、
ことを特徴とするナビゲーション装置。
【請求項7】
請求項5に記載のナビゲーション装置であって、
前記リモートコントローラが向けられる方位の変位速度に応じて、前記検索領域の前記中心角を変更する、
ことを特徴とするナビゲーション装置。
【請求項8】
請求項1乃至8のいずれか1項に記載のナビゲーション装置であって、
前記表示手段が表示した施設の中から、1つの施設を選択する指示を受け付ける選択受付手段と、
選択された前記施設を目的地として経路誘導する経路誘導手段と、
を備えることを特徴とするナビゲーション装置。
【請求項9】
ナビゲーション装置におけるリモートコントローラを用いた施設検索方法であって、
施設の位置情報を記憶している記憶部と、制御部と、を有し、
前記制御部は、
前記リモートコントローラが向けられている絶対方位を算出する絶対方位算出ステップと、
現在位置を算出する現在位置算出ステップと、
前記現在位置から前記絶対方位が示す方向の所定の検索領域に位置する施設を、前記記憶部から検索する施設検索ステップと、
検索した施設を表示する表示ステップと、
を行うことを特徴とする施設検索方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−48739(P2010−48739A)
【公開日】平成22年3月4日(2010.3.4)
【国際特許分類】
【出願番号】特願2008−214969(P2008−214969)
【出願日】平成20年8月25日(2008.8.25)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
【公開日】平成22年3月4日(2010.3.4)
【国際特許分類】
【出願日】平成20年8月25日(2008.8.25)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
[ Back to top ]