
ナビゲーション装置、その方法、そのプログラム及びその記録媒体
【課題】
正確なルート案内に要求される道路種別の判定を簡易な構成で行う。
【解決手段】
道路種別判定部210が、地図データ保持領域121内の地図データを参照することにより、走行中の車両が高速道路と一般道路との並行隣接区間に到達したか否かを判定する。この判定結果が肯定的であった場合に、走行時間計測部220が、並行隣接区間内に車両の走行時間を計測するための測定区間を設定して、車両が測定区間を走行するのに実際に要した時間を計測する。そして、道路種別判定部240が、その計測された走行時間と、測定区間における交通状況を考慮して設定された高速道路用設定値及び一般道路設定値とを利用して、車両が走行している道路種別が高速道路又は一般道路のいずれであるかを判定する。
正確なルート案内に要求される道路種別の判定を簡易な構成で行う。
【解決手段】
道路種別判定部210が、地図データ保持領域121内の地図データを参照することにより、走行中の車両が高速道路と一般道路との並行隣接区間に到達したか否かを判定する。この判定結果が肯定的であった場合に、走行時間計測部220が、並行隣接区間内に車両の走行時間を計測するための測定区間を設定して、車両が測定区間を走行するのに実際に要した時間を計測する。そして、道路種別判定部240が、その計測された走行時間と、測定区間における交通状況を考慮して設定された高速道路用設定値及び一般道路設定値とを利用して、車両が走行している道路種別が高速道路又は一般道路のいずれであるかを判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置、ナビゲーション方法、並びにナビゲーションプログラム及びその記録媒体に関する。
【背景技術】
【0002】
従来から、車両等の移動体に搭載され、移動経路の地図情報等のナビゲーション情報を提供するナビゲーション装置が広く普及している。こうしたナビゲーション装置の技術の進化は目覚しく、近年では、ルート案内の正確さを確保するため、例えば、高速道路が一般道路の直上に敷設された区間等、運用形態の異なる2種類の道路が上下又は左右に並行して隣接する区間(以下、「並行隣接区間」という)における誤ったマップマッチングを回避するための種々の技術が提案されている。この種の技術は、移動体が実際には高速道路を走行しているにもかかわらず、ナビゲーション装置が一般道路を走行しているものと誤認識する状況(その逆の状況を含む)を回避し、目的地までのルートを正確に案内するのに寄与するものである。
【0003】
かかる誤認識を回避して道路種別を正確に判定するためのナビゲーション装置として、例えば、(i)移動体に設置したレーダによりその上方の障害物を検出し、その検出状況から、移動体の現在位置が高架道路上の高速道路又は高架道路下の一般道路のいずれにあるかを判定するもの(特許文献1参照;以下、「第1従来例」という)、(ii)移動体に設置したカメラにより移動体外の景色を撮影し、その画像情報から、高速道路、一般道路それぞれに固有の対象物の有無を認識して道路種別を判定するもの(特許文献2参照;以下、「第2従来例」という)、(iii)移動体に設置した電波ビーコン受信機により、交通情報を提供するため高速道路上に専用に設置されたVICS(Vehicle Information and Communication System)の電波ビーコン信号を受信し、その電波ビーコン信号が検出された事実を以って、移動体が一般道路から高速道路に進入したことを判定するもの(特許文献3参照;以下、「第3従来例」という)等が提案されている。
【0004】
【特許文献1】特開2004−205418号公報
【特許文献2】特開2003−279363号公報
【特許文献3】特開2002−357435号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上述した第1〜第3従来例の技術は、そのいずれもが、ルート案内を行う際の誤認識を回避して道路種別を正確に判定し得るものである。しかしながら、これらの技術においては、所要の道路種別の判定のために、レーダ、カメラ、電波ビーコン受信機等といった、ナビゲーション装置としては特殊な外部機器を導入する必要があることが問題の一例として挙げられる。
【0006】
本発明は、上記のような事情を鑑みてなされたものであり、簡易な構成で、正確なルート案内に要求される道路種別の判定を行うことを目的とする。
【課題を解決するための手段】
【0007】
請求項1に記載の発明は、地図データを参照することにより、走行中の移動体が高速道路と一般道路との並行隣接区間に到達したか否かを判定する道路隣接判定手段と;前記道路隣接判定手段における判定結果が肯定的であった場合に、前記並行隣接区間内に前記移動体の走行時間を計測するための測定区間を設定し、前記移動体が前記測定区間を走行するのに実際に要した時間を計測する走行時間計測手段と;前記走行時間計測手段で計測された走行時間と、前記測定区間における交通状況を考慮して設定された少なくとも1つの事前設定値とを利用して、前記移動体が走行している道路種別が前記高速道路又は前記一般道路のいずれであるかを判定する第1の道路種別判定手段と;を備えることを特徴とするナビゲーション装置である。
【0008】
請求項13に記載の発明は、地図データを参照することにより、走行中の移動体が高速道路と一般道路との並行隣接区間に到達したか否かを判定する道路隣接判定工程と;前記道路隣接判定工程における判定結果が肯定的であった場合に、前記並行隣接区間内に前記移動体の走行時間を計測するための測定区間を設定し、前記移動体が前記測定区間を走行するのに実際に要した時間を計測する走行時間計測工程と;前記走行時間計測工程で計測された走行時間と、前記測定区間における交通状況を考慮して設定された少なくとも1つの事前設定値とを利用して、前記移動体が前記高速道路又は前記一般道路のいずれを走行しているかを判定する道路種別判定工程と;を備えることを特徴とするナビゲーション方法である。
【0009】
請求項14に記載の発明は、請求項13に記載のナビゲーション方法をナビゲーション装置の演算手段に実行させる、ことを特徴とするナビゲーションプログラムである。
【0010】
請求項15に記載の発明は、請求項14に記載のナビゲーションプログラムがナビゲーション装置の演算手段により読み取り可能に記録されている、ことを特徴とするナビゲーションプログラムを記録した記録媒体である。
【発明を実施するための最良の形態】
【0011】
以下、本発明の一実施形態を、図1〜図5Dを参照して説明する。本実施形態では、移動体である車両に搭載される車載型のナビゲーション装置を例示して説明する。
【0012】
[構成]
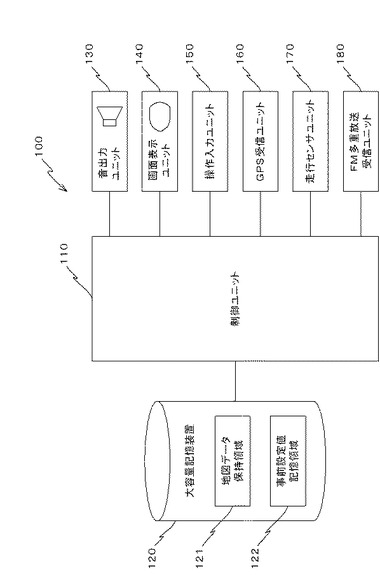
図1には、本実施形態に係るナビゲーション装置100の概略的な構成がブロック図にて示されている。図1に示されるように、このナビゲーション装置100は、演算手段としても機能する制御ユニット110と、大容量記憶装置120と、音出力ユニット130と、画面表示ユニット140と、操作入力ユニット150と、GPS(Global Positioning System)受信ユニット160と、走行センサユニット170と、FM(Frequency Modulation)多重放送受信ユニット180とを備えている。上記制御ユニット110以外の要素120〜180は、それぞれ制御ユニット110に接続されている。
【0013】
このうち、制御ユニット110は、ナビゲーション装置100全体を統括制御すると共に、演算手段としても機能してナビゲーション処理の全般を行う。この制御ユニット110は、中央処理装置(CPU:Central Processing Unit)、読出専用メモリ(ROM:Read Only Memory)、ランダムアクセスメモリ(RAM:Random Access Memory)等を備えて構成され、様々なプログラムが実行されるようになっている。なお、制御ユニット110において実行されるプログラム構成については、後述する。
【0014】
大容量記憶装置120は、ハードディスク装置等により構成され、地図データ、事前設定値、制御ユニット110で実行されるプログラム等の各種データを記憶する。制御ユニット110は、大容量記憶装置120の記憶領域にアクセス可能であり、当該記憶領域へのデータを書き込んだり、当該記憶領域からのデータを読み取ったりすることができるようになっている。
【0015】
大容量記憶装置120には、地図データ保持領域121と、事前設定値記憶領域122とが設けられている。地図データ保持領域121には、ナビゲーション装置100としての基本機能であるナビゲーション機能を実現するためのナビゲーション処理で利用される地図データが、DVD−ROM(Digital Video Disk - Read Only Memory)等の記録媒体から導入され保持される。また、事前設定値記憶領域122には、高速道路と一般道路との並行隣接区間内に設定される測定区間における車両の走行時間に基づいて、所要の道路種別の判定を行う際の時間に関する事前設定値(データ)として、(i)車両が上記測定区間を走行する際の道路種別を時間の大小により単純に判定するための固定データを与える閾値と、(ii)この閾値を基準としながら、上記測定区間における高速道路の交通状況(渋滞状況)に応じた可変データを与える高速道路用設定値(後の動作説明で「A」と表記)と、(iii)前記閾値を基準としながら、上記測定区間における一般道路の交通状況(渋滞状況及び信号機の設置地点数)に応じた可変データを与える一般道路用設定値(後の動作説明で「B」と表記)とが恒久的又は一時的に記憶される。
【0016】
音出力ユニット130は、(i)制御ユニット110から受信したデジタル音声データをアナログ信号に変換するDA変換器(Digital to Analog Converter)と、(ii)当該DA変換器から出力されたアナログ信号を増幅する増幅器と、(iii)増幅されたアナログ信号を音声に変換するスピーカとを備えて構成されている。この音出力ユニット130は、制御ユニット110による制御のもとで、車両の進行方向、走行状況、交通状況等の案内用音声、音楽等を出力する。
【0017】
画面表示ユニット140は、(i)液晶表示パネル、有機EL(Electro Luminescence)パネル、PDP(Plasma Display Panel)等の表示デバイスと、(ii)制御ユニット110から送出された表示制御データに基づいて、画面表示ユニット140全体の制御を行うグラフィックレンダラ等の表示コントローラと、(iii)表示画像データを記憶する表示画像メモリ等を備えて構成されている。この画面表示ユニット140は、制御ユニット110による制御のもとで、地図情報、経路情報、操作ガイダンス情報等を表示する。
【0018】
操作入力ユニット150は、ナビゲーション装置110の本体部に設けられたキー部、あるいはキー部を備えるリモート入力装置等により構成される。ここで、本体部に設けられたキー部としては、画面表示ユニット140の表示デバイスに設けられたタッチパネルを用いることができる。なお、キー部を有する構成に代えて、音声入力する構成を採用することもできる。
【0019】
この操作入力ユニット150を利用者が操作することにより、ナビゲーション装置100の動作内容の設定が行われる。例えば、目的地の設定、情報の検索設定、車両の走行状況表示設定等を、利用者が操作入力ユニット150を利用して行う。こうした入力内容は、操作入力ユニット150から制御ユニット110へ送られる。
【0020】
GPS受信ユニット160は、複数のGPS衛星からの電波の受信結果に基づいて、車両の現在位置の擬似座標値を算出し、制御ユニット110へ報告する。また、GPS受信ユニット160は、GPS衛星から送出された時刻に基づいて、現在時刻を計時し、制御ユニット110へ送る。
【0021】
走行センサユニット170は、(i)車両の移動速度を検出する速度センサと、(ii)車両進行方向である方位角を検出する方位角センサと、(iii)車両に作用している加速度を検出する加速度センサとを備えている。ここで、速度センサは、例えば、車軸や車輪の回転により出力されるパルス信号や電圧値を検出する。また、方位角センサは、例えば、いわゆるジャイロセンサとして構成され、方位角を検出する。また、加速度センサは、例えば、重力加速度を検出する。こうした検出結果は、走行センサユニット170から制御ユニット110へ送られる。
【0022】
なお、本実施形態では、走行センサユニット170に含まれる上記各センサのうち、特に、速度センサから得られるパルス信号や電圧値から、並行隣接区間内に設定された測定区間を車両が走行するのに実際に要した時間を取得するようにしている。
【0023】
FM多重放送受信ユニット180は、FM放送局から放送されているVICSのFM多重放送を受信して、その放送電波に多重化されている高速道路及び一般道路の双方に関する渋滞情報を抽出し、制御ユニット110へ送る。
【0024】
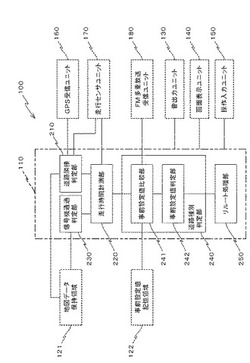
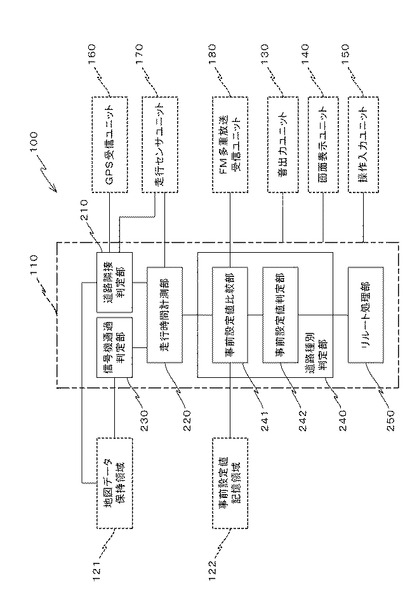
次に、制御ユニット110で実行されるプログラムの構成について、図2を参照して説明する。図2に示されるように、制御ユニット110で実行されるプログラムは、道路隣接判定部210と、走行時間計測部220と、信号機通過判定部230と、道路種別判定部240と、リルート処理部250とを備えている。
【0025】
このうち、道路隣接判定部210は、本発明にいう道路隣接判定手段を構成し、走行中の車両が高速道路と一般道路との並行隣接区間に至ったか否かを判定する機能を有する。この判定に際して、道路隣接判定部210は、大容量記憶装置120の地図データ保持領域121における地図データと、GPS受信ユニット160から報告された車両の現在位置の擬似座標値と、走行センサユニット170から送られた各種の検出結果とを参照する。そして、道路隣接判定部210は、これらの参照結果を利用して、走行中の車両が高速道路と一般道路との並行隣接区間に至ったか否かを判定する。
【0026】
走行時間計測部220は、本発明にいう走行時間計測手段を構成し、道路隣接判定部210における判定結果が肯定的であった場合に、車両が測定区間を走行するのに実際に要した時間を計測する機能を有する。この計測に際して、走行時間計測部220は、並行隣接区間内に車両の走行時間を計測するための測定区間を設定する。そして、走行時間計測部220は、走行センサユニット170内の速度センサから与えられるパルス信号や電圧値から、車両が測定区間を走行するのに実際に要した時間を計測する。
【0027】
信号機通過判定部230は、本発明にいう信号機通過判定手段を構成し、上記測定区間に関して、車両が所定数以上連続して停止せずに通過したか否かを判定する機能を有する。この判定に際して、信号機通過判定部230は、地図データ保持領域121に保持された地図データから取得される信号機位置情報に基づき、この信号機位置情報により示される画面表示ユニット140上の信号機の設置地点を、車両が所定数以上連続して停止せずに通過したか否かを判定する。
【0028】
道路種別判定部240は、本発明にいう第1及び第2の道路種別判定手段を構成し、(i)走行時間計測部220で計測された走行時間と、測定区間における交通状況を考慮して設定された少なくとも1つの事前設定値とを利用して、車両が走行している道路種別が高速道路又は一般道路のいずれであるかを判定する機能と、(ii)信号機通過判定部230における判定結果が肯定的であった場合に、車両が高速道路を走行中であると判定する機能とを有する。
【0029】
この道路種別判定部240は、上記の各機能を遂行するため、事前設定値比較部241と、事前設定値判定部242とを備える。
【0030】
事前設定値比較部241は、(i)測定区間で計測された走行時間と、大容量記憶装置120の事前設定値記憶領域122に恒久的に記憶されている固定データである閾値とに基づいて道路種別を判定する機能、すなわち、走行時間と閾値との大小関係を比較する機能(本発明にいう第1の道路種別判定手段における閾値比較手段)と、(ii)共に事前設定値記憶領域122に一時的に記憶される可変データである高速道路用設定値と一般道路用設定値との大小関係を比較する機能(本発明にいう第1の道路種別判定手段における第1の道路用設定値比較手段)と、(iii)上記大小関係の比較の結果、高速道路用設定値が一般道路用設定値以下であった場合に、測定区間で計測された走行時間と一般道路用設定値との大小関係を更に比較する機能(本発明にいう第1の道路種別判定手段における第2の道路用設定値比較手段)とを有する。
【0031】
事前設定値判定部242は、(i)事前設定値比較部241における比較の結果、計測された走行時間が閾値よりも小さかった場合には、車両が高速道路を走行中であると判定し、それが大きかった場合には、車両が一般道路を走行中であると判定する機能(本発明にいう第1の道路種別判定手段における閾値判定手段)と、(ii)事前設定値比較部241における比較の結果、計測された走行時間が一般道路用設定値よりも小さかった場合には、車両が高速道路を走行中であると判定し、それが大きかった場合には、車両が一般道路を走行中であると判定する機能(本発明にいう第1の道路種別判定手段における道路用設定値判定手段)とを有する。なお、この事前設定値判定部242は、事前設定値比較部241における比較の結果、高速道路用設定値が一般道路用設定値を超えた場合には、道路種別の判定を行わない。
【0032】
ここで、上述した高速道路用設定値は、上記測定区間に関して、FM多重放送受信ユニット180で受信されたFM多重放送から抽出され取得される高速道路の渋滞情報に基づき、この渋滞情報により示される渋滞状況を考慮した値などに設定される。また、一般道路用設定値は、(i)上記測定区間に関して、FM多重放送受信ユニット180で受信されたFM多重放送から抽出され取得される一般道路の渋滞情報に基づき、この渋滞情報により示される渋滞状況を考慮した値や、(ii)上記測定区間に関して、地図データ保持領域121に保持された地図データから取得される一般道路の信号機位置情報に基づき、この信号機位置情報により示される信号機の設置地点数を考慮した値などに設定される。
【0033】
そして、リルート処理部250は、本発明にいうリルート処理手段を構成し、その後に経由することが推奨される経路を再算出するリルート処理を実行する機能を有する。リルート処理部250は、道路種別判定部240における総合的な判定結果と、画面表示ユニット140のディスプレイ上における車両のマップマッチングの状態とが異なる場合に、リルート処理を実行する。
【0034】
なお、以上に説明したプログラムは、ナビゲーション装置100の演算手段としても機能する制御ユニット110により読み取りが可能な形態に、任意の種類の記録媒体に記録されることが可能である。
【0035】
[動作]
次に、以上のように構成されたナビゲーション装置100における道路種別判定処理及びリルート処理の動作について、説明する。
【0036】
ナビゲーション装置100の全体動作におけるナビゲーション処理は、制御ユニット110が、大容量記憶装置120にアクセスしつつ、上述した構成要素130〜180を利用して、利用者にナビゲーション情報を提供することにより行われる。すなわち、ナビゲーション処理における操作入力ユニット150からの指令入力結果、走行センサユニット170による検出結果及びGPS受信ユニット160における測位結果に対応して、制御ユニット110は、大容量記憶装置120に記憶されたナビゲーション用データを適宜読み出す。そして、制御ユニット110は、(a)利用者が指定する地域の地図を画面表示ユニット140のディスプレイに表示する地図表示、(b)自車が地図上のどこに位置するのか、また、どの方角に向かっているのかを算出し、画面表示ユニット140のディスプレイに表示して利用者に伝達するマップマッチング、(c)現在自車が存在位置から、利用者が指定する任意の位置までの推奨する経路を算出する推奨経路の算出、(d)設定された経路に沿って目的地まで運転するときに、進行すべき方向を的確にアドバイスするために、画面表示ユニット140のディスプレイに案内表示をしたり、音出力ユニット130から音声案内を出力するルート案内等を行う。
【0037】
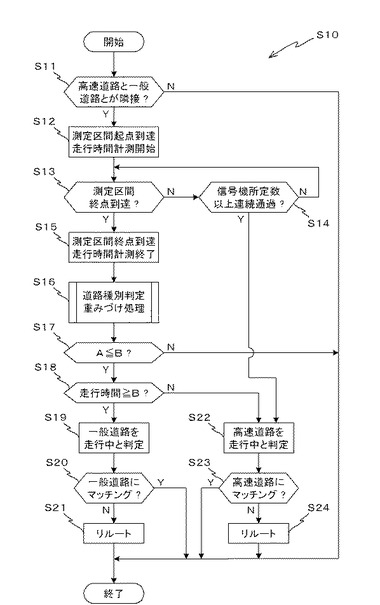
上記のようなナビゲーション処理の実行過程において、車両の走行中に高速道路と一般道路との並行隣接区間が接近し、正確なルート案内に要求される道路種別の判定を行う必要が生じると、制御ユニット110は、図3に示される道路種別判定/リルート処理S10を実行する。すなわち、道路隣接判定部210は、ステップS11において、地図データ保持領域121内の地図データと、GPS受信ユニット160から報告された車両の現在位置の擬似座標値と、走行センサユニット170から送られた各種の検出結果とを総合的に利用して、走行中の車両が高速道路と一般道路との並行隣接区間に到達したか否かを判定する。
【0038】
車両が未だ並行隣接区間に到達しておらず、ステップS11における判定結果が否定的であった場合には、道路種別の判定及びリルートを共に行うことなく道路種別判定/リルート処理S10が終了する。
【0039】
これに対し、車両が実際に並行隣接区間に到達し、ステップS11における判定結果が肯定的な状態となると、走行時間計測部220が、ステップS12において、並行隣接区間内に車両の走行時間を計測するための測定区間を設定し、この測定区間における車両の走行時間の計測を開始する。なお、この測定区間としては、事前に設定された固定的な距離(例えば1km)を定義することができるが、このほかにも、道路沿線において目標点となりうる任意の対象物(例えば信号機)同士の距離(地点間距離)などを定義することができる。
【0040】
測定区間における車両の走行時間の計測が開始されると、ステップS13において、車両が測定区間の終点に到達したか否かが判定される。このステップS13における判定結果が否定的であった場合には、処理がステップS14へ移行する。このステップS14においては、信号機通過判定部230が、測定区間に関して地図データ保持領域121内の地図データから取得される信号機位置情報に基づき、この信号機位置情報により示される信号機の設置地点を、車両が所定数以上連続して停止せずに通過したか否かを判定する。
【0041】
ステップS14における判定の結果が肯定的であった場合、車両は信号機の設置されていない方の道路を走行中であると判定できるため、道路種別判定部240が、ステップS22において、一般に信号機が設置されていない高速道路を車両が走行中であると判定する。引き続き、ステップS23において、道路種別判定部240が、車両のマップマッチングが実際に高速道路に対して行われているか否かを判定する。
【0042】
ステップS23における判定の結果が肯定的であった場合、リルート処理を行うことなく道路種別判定/リルート処理S10が終了する。一方、ステップS23における判定の結果が否定的であった場合には、リルート処理部250が、ステップS24において、現在の車両の位置が高速道路上にあることを前提としたリルート処理を行う。その後に、道路種別判定/リルート処理S10が終了する。
【0043】
ステップS14における判定の結果が否定的であった場合には、処理は、ステップS13へ移行する。その後、車両が測定区間の終点に到達するまで、又は、ステップS14における判定の結果が肯定的となるまで、ステップS13とステップS14との処理が繰り返される。
【0044】
そして、車両が測定区間の終点に到達すると、ステップS13における判定結果が肯定的な状態になり、処理がステップS15へ移行する。このステップS15においては、走行時間計測部220が、車両が測定区間の終点に到達して走行時間の計測を終了し、車両が測定区間を走行するのに実際に要した時間である走行時間を得る。こうして走行時間の取得が終了すると、道路種別判定部240の事前設定値比較部241が、道路種別判定重みづけ処理S16を実行する。
【0045】
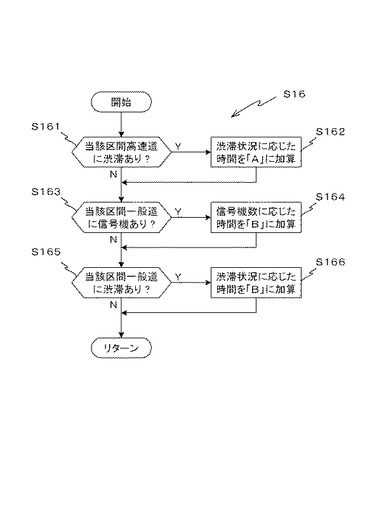
道路種別判定重みづけ処理S16では、図4に示されるように、まず、事前設定値比較部241は、ステップS161において、FM多重放送受信ユニット180を通じて取得される高速道路の渋滞情報から、当該区間(測定区間)における高速道路(図中、「高速道」と略記)に渋滞があるか否を判定する。このステップS161における判定の結果が否定的であった場合には、処理はステップS163へ移行する。一方、ステップS161における判定の結果が肯定的であった場合には、ステップS162において、その渋滞情報により示される具体的な渋滞状況に応じた時間を、事前設定値記憶領域122に記憶されている高速道路用設定値「A」に加算し、新たな高速道路用設定値「A」とする。この後、処理はステップS163へ移行する。
【0046】
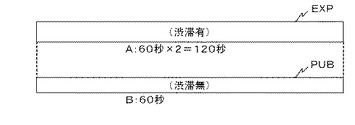
なお、上述の高速道路用設定値「A」は、後述する一般道路用設定値「B」と共に、事前設定値記憶領域122に固定データとして記憶されている閾値によって初期値(例えば60秒)を与えられ、その加算値が、可変データとして再び事前設定値記憶領域122に記憶されるようになっている(すなわち、初期状態において、閾値=高速道路用設定値「A」=一般道路用設定値「B」)。図5Aには、高速道路EXPの実際の渋滞状況に応じて、高速道路用設定値「A」が通常の2倍の120秒に設定された場合の例が示されている(一般道路PUBに関する一般道路用設定値「B」は初期値の60秒)。
【0047】
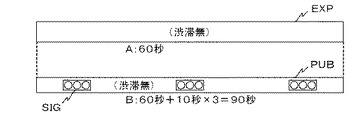
図4に戻り、次に、事前設定値比較部241は、ステップS163において、地図データ保持領域121内の地図データから取得される一般道路の信号機位置情報から、当該区間(測定区間)における一般道路(図中、「一般道」と略記)に信号機があるか否を判定する。このステップS163における判定の結果が否定的であった場合には、処理はステップS165へ移行する。一方、ステップS163における判定の結果が肯定的であった場合には、ステップS164において、事前設定値比較部241は、信号機位置情報により示される具体的な信号機の設置地点数に応じた時間を、事前設定値記憶領域122に記憶されている一般道路用設定値「B」に加算し、新たな一般道路用設定値「B」とする。この後、処理はステップS163へ移行する。図5Bには、一般道路PUBの実際の信号機の設置地点数(3地点)に応じて、一般道路用設定値「B」が90秒(1地点あたり10秒加算)に設定された場合の例が示されている(高速道路EXPに関する高速道路用設定値「A」は初期値の60秒)。
【0048】
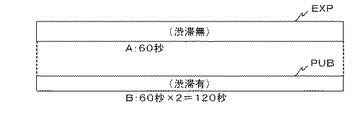
図4に戻り、次に、事前設定値比較部241は、ステップS165において、FM多重放送受信ユニット180を通じて取得される高速道路の渋滞情報から、当該区間(測定区間)における一般道路(図中、「一般道」と略記)に渋滞があるか否を判定する。このステップS165における判定の結果が否定的であった場合には、道路種別判定重みづけ処理S16の処理が終了する。一方、ステップS165における判定の結果が肯定的であった場合には、ステップS166において、事前設定値比較部241は、渋滞情報により示される具体的な渋滞状況に応じた時間を、事前設定値記憶領域122に記憶されている一般道路用設定値「B」に加算して、新たな一般道路用設定値「B」とする。この後、道路種別判定重みづけ処理S16の処理が終了する。図5Cには、一般道路PUBの実際の渋滞状況に応じて、一般道路用設定値「B」が通常の2倍の120秒に設定された場合の例が示されている(高速道路EXPに関する一般道路用設定値「A」は初期値の60秒)。
【0049】
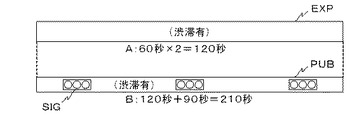
以上のステップS161(S162)、S163(S164)及びS165(S166)の実行順序は任意である。なお、図5Dには、上記各例に示した状況が全て生じた場合の例が示されている。
【0050】
そして、以上のステップS161〜S166の実行により、道路種別判定重みづけ処理S16が完遂すると、処理は道路種別判定/リルート処理S10に復帰する。引き続き、図3に示されるステップS17において、事前設定値比較部241が、事前設定値記憶領域122に記憶された高速道路用設定値「A」が一般道路用設定値「B」以下(A≦B)であるか否かを判定する。
【0051】
ステップS17における判定の結果が否定的であり、事前設定値記憶領域122に記憶された高速道路用設定値「A」が一般道路用設定値「B」を超えていた(A>B)場合、高速道路における予想される走行時間が一般道路のそれよりも大きく(時間がかかり)、道路種別の判定が事実上困難であると判断する。そして、所要の道路種別の判定及びリルート処理を共に行うことなく道路種別判定/リルート処理S10が終了する。
【0052】
一方、ステップS17における判定の結果が肯定的であり、高速道路用設定値「A」が一般道路用設定値「B」以下であった場合には、処理はステップS18へ移行する。このステップS18において、事前設定値比較部241は、測定区間における車両の走行時間が一般道路用設定値「B」以上(走行時間≧B)であるか否かを更に判定する。
【0053】
ステップS18における判定の結果が否定的であり、車両の走行時間が一般道路用設定値「B」未満であった(走行時間<B)場合、事前設定値判定部242は、ステップS22において、車両が高速道路を走行中であると判定する。引き続き、前述のステップS23以降の処理が実行される。この後、道路種別判定/リルート処理S10が終了する。
【0054】
一方、ステップS18における判定の結果が肯定的であり、車両の走行時間が一般道路用設定値「B」以上であった場合には、処理はステップS19へ移行する。このステップS19において、事前設定値判定部242は、車両が一般道路を走行中であると判定する。引き続き、事前設定値判定部242は、ステップS20において、車両のマップマッチングが実際に一般道路に対して行われているか否かを判定する。
【0055】
ステップS20における判定の結果が肯定的であった場合には、リルート処理を行うことなく道路種別判定/リルート処理S10が終了する。一方、ステップS20における判定の結果が否定的であった場合には、処理は、ステップS21へ移行する。このステップS21において、リルート処理部250は、現在の車両の位置が一般道路上にあることを前提としたリルート処理を行った後に、道路種別判定/リルート処理S10が終了する。
【0056】
以上、道路種別判定/リルート処理S10を説明したが、本説明では、道路種別判定重みづけ処理S16において高速道路用設定値「A」及び一般道路用設定値「B」が、道路状況や交通状況により変化する場合を想定した。これに対し、これら高速道路用設定値「A」及び一般道路用設定値「B」を初期値(閾値)から変化させずに、すなわち、道路状況や交通状況を考慮せずに道路種別の判定を行ってもよい。この場合、ステップS15において車両が測定区間の終点に到達したと判断すると、ステップS16における道路種別判定重みづけ処理を行わずにステップS17へ移行する。すなわち、高速道路用設定値「A」及び一般道路用設定値「B」は初期値(閾値)から変化することなくステップS17へ移行する。従って、ステップS18において走行時間との比較の対象とされる一般道路用設定値「B」は、自ずと閾値(例えば60秒)に等しくなり(高速道路用設定値「A」も同様)、ステップS19及びS22における道路種別の判定は、ステップS18において、走行時間と閾値との大小関係のみに基づいて行われることになる。
【0057】
[作用効果]
以上説明したように、本実施形態では、道路隣接判定部210が、地図データ保持領域121内の地図データを参照することにより、走行中の車両が高速道路と一般道路との並行隣接区間に到達したか否かを判定し、その判定結果が肯定的であった場合に、走行時間計測部220が、並行隣接区間内に車両の走行時間を計測するための測定区間を設定して、車両が測定区間を走行するのに実際に要した時間を計測し、道路種別判定部240が、その計測された走行時間と、測定区間における交通状況、すなわち、(i)地図データから取得可能な一般道路における信号機位置情報(信号機の設置地点数)、及び(ii)FM多重放送受信ユニット180から取得可能な高速道路及び一般道路における渋滞情報(渋滞状況)を考慮して設定された高速道路用設定値「A」及び一般道路設定値「B」とを利用して、車両が走行している道路種別が高速道路又は一般道路のいずれであるかを判定するようにしている。
【0058】
このため、正確なルート案内に要求される道路種別の判定が、従来のように、レーダ、カメラ、電波ビーコン受信機等といった特殊な外部機器を使用することなく、ナビゲーション装置100の必須構成要素とされている「地図データ検索表示機能」及び「FM多重放送受信機能」のみにより行うことが可能となり、その結果、主にプログラム構成を変更するだけで、所要のナビゲーション装置100を構成する際に大幅なコストダウンを図ることが可能となる。
【0059】
[実施形態の変形]
本発明は、上記の実施形態に限定されるものではなく、様々な変形が可能である。
【0060】
例えば、上記の実施形態では、道路種別判定/リルート処理S10の道路種別判定重みづけ処理S16において、高速道路用設定値「A」及び一般道路用設定値「B」が変化しない状況があり得ることを考慮し、ステップS18において走行時間との比較の対象とされる事前設定値として一般道路用設定値「B」を選定したが、場合によっては、高速道路用設定値「A」を比較対象とすることも可能である。この場合、事前設定値比較部241に、測定区間における車両の走行時間が高速道路用設定値「A」以上(走行時間≧A)であるか否かを判定させるようにすればよい(A〜Bの範囲に含まれる任意値を比較対象値とすることも可能)。
【0061】
また、上記の実施形態では、閾値を固定データとして扱ったが、道路種別判定重みづけ処理S16において高速道路用設定値「A」及び一般道路用設定値「B」を変化させるのではなく、場合により、その閾値自身を、FM多重放送受信ユニット180で受信されたFM多重放送から抽出され取得される一般道路の渋滞情報に基づき、この渋滞情報により示される渋滞状況を考慮した値に直接設定したり、あるいは、地図データ保持領域121に保持された地図データから取得される一般道路の信号機位置情報に基づき、この信号機位置情報により示される信号機の設置地点数を考慮した値に直接設定することなども可能である。
【0062】
また、上記の実施形態では、制御ユニット110における各機能を、対応するプログラムを実行することにより実現したが、その一部又は全てを、ファームウエアの実装等をしたハードウエアによって実現することもできる。
【0063】
また、上記の実施形態では、車載のナビゲーション装置に本発明を適用した例を挙げて説明したが、車両に乗車する利用者が携帯することができる携帯型装置であるPDA(Personal Digital Assistant)、携帯電話端末、PHS(Personal Handyphone System)端末、携帯型パーソナルコンピュータ等に搭載されるナビゲーション装置にも本発明を適用することができる。
【図面の簡単な説明】
【0064】
【図1】本発明の一実施形態に係るナビゲーション装置の構成を概略的に示すブロック図である。
【図2】図1の制御ユニットにおいて実行されるプログラムの構成を説明するためのブロック図である。
【図3】一実施形態に適用される道路種別判定/リルート処理を説明するためのフローチャートである。
【図4】図3の道路種別判定重みづけ処理を説明するためのフローチャートである。
【図5A】図4の道路種別判定重みづけ処理における高速道路用設定値及び一般道路用設定値への重みづけの例(その1)を示す図である。
【図5B】図4の道路種別判定重みづけ処理における高速道路用設定値及び一般道路用設定値への重みづけの例(その2)を示す図である。
【図5C】図4の道路種別判定重みづけ処理における高速道路用設定値及び一般道路用設定値への重みづけの例(その3)を示す図である。
【図5D】図4の道路種別判定重みづけ処理における高速道路用設定値及び一般道路用設定値への重みづけの例(その4)を示す図である。
【符号の説明】
【0065】
100…ナビゲーション装置
110…制御ユニット(演算手段)
121…地図データ保持領域
122…事前設定値記憶領域
180…FM多重放送受信ユニット
210…道路隣接判定部(道路隣接判定手段)
220…走行時間計測部(走行時間計測手段)
230…信号機通過判定部(信号機通過判定手段)
240…道路種別判定部(第1及び第2の道路種別判定手段)
241…事前設定値比較部(閾値比較手段、第1及び第2の道路用設定値比較手段)
242…事前設定値判定部(閾値判定手段、道路用設定値判定手段)
250…リルート処理部(リルート処理手段)
【技術分野】
【0001】
本発明は、ナビゲーション装置、ナビゲーション方法、並びにナビゲーションプログラム及びその記録媒体に関する。
【背景技術】
【0002】
従来から、車両等の移動体に搭載され、移動経路の地図情報等のナビゲーション情報を提供するナビゲーション装置が広く普及している。こうしたナビゲーション装置の技術の進化は目覚しく、近年では、ルート案内の正確さを確保するため、例えば、高速道路が一般道路の直上に敷設された区間等、運用形態の異なる2種類の道路が上下又は左右に並行して隣接する区間(以下、「並行隣接区間」という)における誤ったマップマッチングを回避するための種々の技術が提案されている。この種の技術は、移動体が実際には高速道路を走行しているにもかかわらず、ナビゲーション装置が一般道路を走行しているものと誤認識する状況(その逆の状況を含む)を回避し、目的地までのルートを正確に案内するのに寄与するものである。
【0003】
かかる誤認識を回避して道路種別を正確に判定するためのナビゲーション装置として、例えば、(i)移動体に設置したレーダによりその上方の障害物を検出し、その検出状況から、移動体の現在位置が高架道路上の高速道路又は高架道路下の一般道路のいずれにあるかを判定するもの(特許文献1参照;以下、「第1従来例」という)、(ii)移動体に設置したカメラにより移動体外の景色を撮影し、その画像情報から、高速道路、一般道路それぞれに固有の対象物の有無を認識して道路種別を判定するもの(特許文献2参照;以下、「第2従来例」という)、(iii)移動体に設置した電波ビーコン受信機により、交通情報を提供するため高速道路上に専用に設置されたVICS(Vehicle Information and Communication System)の電波ビーコン信号を受信し、その電波ビーコン信号が検出された事実を以って、移動体が一般道路から高速道路に進入したことを判定するもの(特許文献3参照;以下、「第3従来例」という)等が提案されている。
【0004】
【特許文献1】特開2004−205418号公報
【特許文献2】特開2003−279363号公報
【特許文献3】特開2002−357435号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上述した第1〜第3従来例の技術は、そのいずれもが、ルート案内を行う際の誤認識を回避して道路種別を正確に判定し得るものである。しかしながら、これらの技術においては、所要の道路種別の判定のために、レーダ、カメラ、電波ビーコン受信機等といった、ナビゲーション装置としては特殊な外部機器を導入する必要があることが問題の一例として挙げられる。
【0006】
本発明は、上記のような事情を鑑みてなされたものであり、簡易な構成で、正確なルート案内に要求される道路種別の判定を行うことを目的とする。
【課題を解決するための手段】
【0007】
請求項1に記載の発明は、地図データを参照することにより、走行中の移動体が高速道路と一般道路との並行隣接区間に到達したか否かを判定する道路隣接判定手段と;前記道路隣接判定手段における判定結果が肯定的であった場合に、前記並行隣接区間内に前記移動体の走行時間を計測するための測定区間を設定し、前記移動体が前記測定区間を走行するのに実際に要した時間を計測する走行時間計測手段と;前記走行時間計測手段で計測された走行時間と、前記測定区間における交通状況を考慮して設定された少なくとも1つの事前設定値とを利用して、前記移動体が走行している道路種別が前記高速道路又は前記一般道路のいずれであるかを判定する第1の道路種別判定手段と;を備えることを特徴とするナビゲーション装置である。
【0008】
請求項13に記載の発明は、地図データを参照することにより、走行中の移動体が高速道路と一般道路との並行隣接区間に到達したか否かを判定する道路隣接判定工程と;前記道路隣接判定工程における判定結果が肯定的であった場合に、前記並行隣接区間内に前記移動体の走行時間を計測するための測定区間を設定し、前記移動体が前記測定区間を走行するのに実際に要した時間を計測する走行時間計測工程と;前記走行時間計測工程で計測された走行時間と、前記測定区間における交通状況を考慮して設定された少なくとも1つの事前設定値とを利用して、前記移動体が前記高速道路又は前記一般道路のいずれを走行しているかを判定する道路種別判定工程と;を備えることを特徴とするナビゲーション方法である。
【0009】
請求項14に記載の発明は、請求項13に記載のナビゲーション方法をナビゲーション装置の演算手段に実行させる、ことを特徴とするナビゲーションプログラムである。
【0010】
請求項15に記載の発明は、請求項14に記載のナビゲーションプログラムがナビゲーション装置の演算手段により読み取り可能に記録されている、ことを特徴とするナビゲーションプログラムを記録した記録媒体である。
【発明を実施するための最良の形態】
【0011】
以下、本発明の一実施形態を、図1〜図5Dを参照して説明する。本実施形態では、移動体である車両に搭載される車載型のナビゲーション装置を例示して説明する。
【0012】
[構成]
図1には、本実施形態に係るナビゲーション装置100の概略的な構成がブロック図にて示されている。図1に示されるように、このナビゲーション装置100は、演算手段としても機能する制御ユニット110と、大容量記憶装置120と、音出力ユニット130と、画面表示ユニット140と、操作入力ユニット150と、GPS(Global Positioning System)受信ユニット160と、走行センサユニット170と、FM(Frequency Modulation)多重放送受信ユニット180とを備えている。上記制御ユニット110以外の要素120〜180は、それぞれ制御ユニット110に接続されている。
【0013】
このうち、制御ユニット110は、ナビゲーション装置100全体を統括制御すると共に、演算手段としても機能してナビゲーション処理の全般を行う。この制御ユニット110は、中央処理装置(CPU:Central Processing Unit)、読出専用メモリ(ROM:Read Only Memory)、ランダムアクセスメモリ(RAM:Random Access Memory)等を備えて構成され、様々なプログラムが実行されるようになっている。なお、制御ユニット110において実行されるプログラム構成については、後述する。
【0014】
大容量記憶装置120は、ハードディスク装置等により構成され、地図データ、事前設定値、制御ユニット110で実行されるプログラム等の各種データを記憶する。制御ユニット110は、大容量記憶装置120の記憶領域にアクセス可能であり、当該記憶領域へのデータを書き込んだり、当該記憶領域からのデータを読み取ったりすることができるようになっている。
【0015】
大容量記憶装置120には、地図データ保持領域121と、事前設定値記憶領域122とが設けられている。地図データ保持領域121には、ナビゲーション装置100としての基本機能であるナビゲーション機能を実現するためのナビゲーション処理で利用される地図データが、DVD−ROM(Digital Video Disk - Read Only Memory)等の記録媒体から導入され保持される。また、事前設定値記憶領域122には、高速道路と一般道路との並行隣接区間内に設定される測定区間における車両の走行時間に基づいて、所要の道路種別の判定を行う際の時間に関する事前設定値(データ)として、(i)車両が上記測定区間を走行する際の道路種別を時間の大小により単純に判定するための固定データを与える閾値と、(ii)この閾値を基準としながら、上記測定区間における高速道路の交通状況(渋滞状況)に応じた可変データを与える高速道路用設定値(後の動作説明で「A」と表記)と、(iii)前記閾値を基準としながら、上記測定区間における一般道路の交通状況(渋滞状況及び信号機の設置地点数)に応じた可変データを与える一般道路用設定値(後の動作説明で「B」と表記)とが恒久的又は一時的に記憶される。
【0016】
音出力ユニット130は、(i)制御ユニット110から受信したデジタル音声データをアナログ信号に変換するDA変換器(Digital to Analog Converter)と、(ii)当該DA変換器から出力されたアナログ信号を増幅する増幅器と、(iii)増幅されたアナログ信号を音声に変換するスピーカとを備えて構成されている。この音出力ユニット130は、制御ユニット110による制御のもとで、車両の進行方向、走行状況、交通状況等の案内用音声、音楽等を出力する。
【0017】
画面表示ユニット140は、(i)液晶表示パネル、有機EL(Electro Luminescence)パネル、PDP(Plasma Display Panel)等の表示デバイスと、(ii)制御ユニット110から送出された表示制御データに基づいて、画面表示ユニット140全体の制御を行うグラフィックレンダラ等の表示コントローラと、(iii)表示画像データを記憶する表示画像メモリ等を備えて構成されている。この画面表示ユニット140は、制御ユニット110による制御のもとで、地図情報、経路情報、操作ガイダンス情報等を表示する。
【0018】
操作入力ユニット150は、ナビゲーション装置110の本体部に設けられたキー部、あるいはキー部を備えるリモート入力装置等により構成される。ここで、本体部に設けられたキー部としては、画面表示ユニット140の表示デバイスに設けられたタッチパネルを用いることができる。なお、キー部を有する構成に代えて、音声入力する構成を採用することもできる。
【0019】
この操作入力ユニット150を利用者が操作することにより、ナビゲーション装置100の動作内容の設定が行われる。例えば、目的地の設定、情報の検索設定、車両の走行状況表示設定等を、利用者が操作入力ユニット150を利用して行う。こうした入力内容は、操作入力ユニット150から制御ユニット110へ送られる。
【0020】
GPS受信ユニット160は、複数のGPS衛星からの電波の受信結果に基づいて、車両の現在位置の擬似座標値を算出し、制御ユニット110へ報告する。また、GPS受信ユニット160は、GPS衛星から送出された時刻に基づいて、現在時刻を計時し、制御ユニット110へ送る。
【0021】
走行センサユニット170は、(i)車両の移動速度を検出する速度センサと、(ii)車両進行方向である方位角を検出する方位角センサと、(iii)車両に作用している加速度を検出する加速度センサとを備えている。ここで、速度センサは、例えば、車軸や車輪の回転により出力されるパルス信号や電圧値を検出する。また、方位角センサは、例えば、いわゆるジャイロセンサとして構成され、方位角を検出する。また、加速度センサは、例えば、重力加速度を検出する。こうした検出結果は、走行センサユニット170から制御ユニット110へ送られる。
【0022】
なお、本実施形態では、走行センサユニット170に含まれる上記各センサのうち、特に、速度センサから得られるパルス信号や電圧値から、並行隣接区間内に設定された測定区間を車両が走行するのに実際に要した時間を取得するようにしている。
【0023】
FM多重放送受信ユニット180は、FM放送局から放送されているVICSのFM多重放送を受信して、その放送電波に多重化されている高速道路及び一般道路の双方に関する渋滞情報を抽出し、制御ユニット110へ送る。
【0024】
次に、制御ユニット110で実行されるプログラムの構成について、図2を参照して説明する。図2に示されるように、制御ユニット110で実行されるプログラムは、道路隣接判定部210と、走行時間計測部220と、信号機通過判定部230と、道路種別判定部240と、リルート処理部250とを備えている。
【0025】
このうち、道路隣接判定部210は、本発明にいう道路隣接判定手段を構成し、走行中の車両が高速道路と一般道路との並行隣接区間に至ったか否かを判定する機能を有する。この判定に際して、道路隣接判定部210は、大容量記憶装置120の地図データ保持領域121における地図データと、GPS受信ユニット160から報告された車両の現在位置の擬似座標値と、走行センサユニット170から送られた各種の検出結果とを参照する。そして、道路隣接判定部210は、これらの参照結果を利用して、走行中の車両が高速道路と一般道路との並行隣接区間に至ったか否かを判定する。
【0026】
走行時間計測部220は、本発明にいう走行時間計測手段を構成し、道路隣接判定部210における判定結果が肯定的であった場合に、車両が測定区間を走行するのに実際に要した時間を計測する機能を有する。この計測に際して、走行時間計測部220は、並行隣接区間内に車両の走行時間を計測するための測定区間を設定する。そして、走行時間計測部220は、走行センサユニット170内の速度センサから与えられるパルス信号や電圧値から、車両が測定区間を走行するのに実際に要した時間を計測する。
【0027】
信号機通過判定部230は、本発明にいう信号機通過判定手段を構成し、上記測定区間に関して、車両が所定数以上連続して停止せずに通過したか否かを判定する機能を有する。この判定に際して、信号機通過判定部230は、地図データ保持領域121に保持された地図データから取得される信号機位置情報に基づき、この信号機位置情報により示される画面表示ユニット140上の信号機の設置地点を、車両が所定数以上連続して停止せずに通過したか否かを判定する。
【0028】
道路種別判定部240は、本発明にいう第1及び第2の道路種別判定手段を構成し、(i)走行時間計測部220で計測された走行時間と、測定区間における交通状況を考慮して設定された少なくとも1つの事前設定値とを利用して、車両が走行している道路種別が高速道路又は一般道路のいずれであるかを判定する機能と、(ii)信号機通過判定部230における判定結果が肯定的であった場合に、車両が高速道路を走行中であると判定する機能とを有する。
【0029】
この道路種別判定部240は、上記の各機能を遂行するため、事前設定値比較部241と、事前設定値判定部242とを備える。
【0030】
事前設定値比較部241は、(i)測定区間で計測された走行時間と、大容量記憶装置120の事前設定値記憶領域122に恒久的に記憶されている固定データである閾値とに基づいて道路種別を判定する機能、すなわち、走行時間と閾値との大小関係を比較する機能(本発明にいう第1の道路種別判定手段における閾値比較手段)と、(ii)共に事前設定値記憶領域122に一時的に記憶される可変データである高速道路用設定値と一般道路用設定値との大小関係を比較する機能(本発明にいう第1の道路種別判定手段における第1の道路用設定値比較手段)と、(iii)上記大小関係の比較の結果、高速道路用設定値が一般道路用設定値以下であった場合に、測定区間で計測された走行時間と一般道路用設定値との大小関係を更に比較する機能(本発明にいう第1の道路種別判定手段における第2の道路用設定値比較手段)とを有する。
【0031】
事前設定値判定部242は、(i)事前設定値比較部241における比較の結果、計測された走行時間が閾値よりも小さかった場合には、車両が高速道路を走行中であると判定し、それが大きかった場合には、車両が一般道路を走行中であると判定する機能(本発明にいう第1の道路種別判定手段における閾値判定手段)と、(ii)事前設定値比較部241における比較の結果、計測された走行時間が一般道路用設定値よりも小さかった場合には、車両が高速道路を走行中であると判定し、それが大きかった場合には、車両が一般道路を走行中であると判定する機能(本発明にいう第1の道路種別判定手段における道路用設定値判定手段)とを有する。なお、この事前設定値判定部242は、事前設定値比較部241における比較の結果、高速道路用設定値が一般道路用設定値を超えた場合には、道路種別の判定を行わない。
【0032】
ここで、上述した高速道路用設定値は、上記測定区間に関して、FM多重放送受信ユニット180で受信されたFM多重放送から抽出され取得される高速道路の渋滞情報に基づき、この渋滞情報により示される渋滞状況を考慮した値などに設定される。また、一般道路用設定値は、(i)上記測定区間に関して、FM多重放送受信ユニット180で受信されたFM多重放送から抽出され取得される一般道路の渋滞情報に基づき、この渋滞情報により示される渋滞状況を考慮した値や、(ii)上記測定区間に関して、地図データ保持領域121に保持された地図データから取得される一般道路の信号機位置情報に基づき、この信号機位置情報により示される信号機の設置地点数を考慮した値などに設定される。
【0033】
そして、リルート処理部250は、本発明にいうリルート処理手段を構成し、その後に経由することが推奨される経路を再算出するリルート処理を実行する機能を有する。リルート処理部250は、道路種別判定部240における総合的な判定結果と、画面表示ユニット140のディスプレイ上における車両のマップマッチングの状態とが異なる場合に、リルート処理を実行する。
【0034】
なお、以上に説明したプログラムは、ナビゲーション装置100の演算手段としても機能する制御ユニット110により読み取りが可能な形態に、任意の種類の記録媒体に記録されることが可能である。
【0035】
[動作]
次に、以上のように構成されたナビゲーション装置100における道路種別判定処理及びリルート処理の動作について、説明する。
【0036】
ナビゲーション装置100の全体動作におけるナビゲーション処理は、制御ユニット110が、大容量記憶装置120にアクセスしつつ、上述した構成要素130〜180を利用して、利用者にナビゲーション情報を提供することにより行われる。すなわち、ナビゲーション処理における操作入力ユニット150からの指令入力結果、走行センサユニット170による検出結果及びGPS受信ユニット160における測位結果に対応して、制御ユニット110は、大容量記憶装置120に記憶されたナビゲーション用データを適宜読み出す。そして、制御ユニット110は、(a)利用者が指定する地域の地図を画面表示ユニット140のディスプレイに表示する地図表示、(b)自車が地図上のどこに位置するのか、また、どの方角に向かっているのかを算出し、画面表示ユニット140のディスプレイに表示して利用者に伝達するマップマッチング、(c)現在自車が存在位置から、利用者が指定する任意の位置までの推奨する経路を算出する推奨経路の算出、(d)設定された経路に沿って目的地まで運転するときに、進行すべき方向を的確にアドバイスするために、画面表示ユニット140のディスプレイに案内表示をしたり、音出力ユニット130から音声案内を出力するルート案内等を行う。
【0037】
上記のようなナビゲーション処理の実行過程において、車両の走行中に高速道路と一般道路との並行隣接区間が接近し、正確なルート案内に要求される道路種別の判定を行う必要が生じると、制御ユニット110は、図3に示される道路種別判定/リルート処理S10を実行する。すなわち、道路隣接判定部210は、ステップS11において、地図データ保持領域121内の地図データと、GPS受信ユニット160から報告された車両の現在位置の擬似座標値と、走行センサユニット170から送られた各種の検出結果とを総合的に利用して、走行中の車両が高速道路と一般道路との並行隣接区間に到達したか否かを判定する。
【0038】
車両が未だ並行隣接区間に到達しておらず、ステップS11における判定結果が否定的であった場合には、道路種別の判定及びリルートを共に行うことなく道路種別判定/リルート処理S10が終了する。
【0039】
これに対し、車両が実際に並行隣接区間に到達し、ステップS11における判定結果が肯定的な状態となると、走行時間計測部220が、ステップS12において、並行隣接区間内に車両の走行時間を計測するための測定区間を設定し、この測定区間における車両の走行時間の計測を開始する。なお、この測定区間としては、事前に設定された固定的な距離(例えば1km)を定義することができるが、このほかにも、道路沿線において目標点となりうる任意の対象物(例えば信号機)同士の距離(地点間距離)などを定義することができる。
【0040】
測定区間における車両の走行時間の計測が開始されると、ステップS13において、車両が測定区間の終点に到達したか否かが判定される。このステップS13における判定結果が否定的であった場合には、処理がステップS14へ移行する。このステップS14においては、信号機通過判定部230が、測定区間に関して地図データ保持領域121内の地図データから取得される信号機位置情報に基づき、この信号機位置情報により示される信号機の設置地点を、車両が所定数以上連続して停止せずに通過したか否かを判定する。
【0041】
ステップS14における判定の結果が肯定的であった場合、車両は信号機の設置されていない方の道路を走行中であると判定できるため、道路種別判定部240が、ステップS22において、一般に信号機が設置されていない高速道路を車両が走行中であると判定する。引き続き、ステップS23において、道路種別判定部240が、車両のマップマッチングが実際に高速道路に対して行われているか否かを判定する。
【0042】
ステップS23における判定の結果が肯定的であった場合、リルート処理を行うことなく道路種別判定/リルート処理S10が終了する。一方、ステップS23における判定の結果が否定的であった場合には、リルート処理部250が、ステップS24において、現在の車両の位置が高速道路上にあることを前提としたリルート処理を行う。その後に、道路種別判定/リルート処理S10が終了する。
【0043】
ステップS14における判定の結果が否定的であった場合には、処理は、ステップS13へ移行する。その後、車両が測定区間の終点に到達するまで、又は、ステップS14における判定の結果が肯定的となるまで、ステップS13とステップS14との処理が繰り返される。
【0044】
そして、車両が測定区間の終点に到達すると、ステップS13における判定結果が肯定的な状態になり、処理がステップS15へ移行する。このステップS15においては、走行時間計測部220が、車両が測定区間の終点に到達して走行時間の計測を終了し、車両が測定区間を走行するのに実際に要した時間である走行時間を得る。こうして走行時間の取得が終了すると、道路種別判定部240の事前設定値比較部241が、道路種別判定重みづけ処理S16を実行する。
【0045】
道路種別判定重みづけ処理S16では、図4に示されるように、まず、事前設定値比較部241は、ステップS161において、FM多重放送受信ユニット180を通じて取得される高速道路の渋滞情報から、当該区間(測定区間)における高速道路(図中、「高速道」と略記)に渋滞があるか否を判定する。このステップS161における判定の結果が否定的であった場合には、処理はステップS163へ移行する。一方、ステップS161における判定の結果が肯定的であった場合には、ステップS162において、その渋滞情報により示される具体的な渋滞状況に応じた時間を、事前設定値記憶領域122に記憶されている高速道路用設定値「A」に加算し、新たな高速道路用設定値「A」とする。この後、処理はステップS163へ移行する。
【0046】
なお、上述の高速道路用設定値「A」は、後述する一般道路用設定値「B」と共に、事前設定値記憶領域122に固定データとして記憶されている閾値によって初期値(例えば60秒)を与えられ、その加算値が、可変データとして再び事前設定値記憶領域122に記憶されるようになっている(すなわち、初期状態において、閾値=高速道路用設定値「A」=一般道路用設定値「B」)。図5Aには、高速道路EXPの実際の渋滞状況に応じて、高速道路用設定値「A」が通常の2倍の120秒に設定された場合の例が示されている(一般道路PUBに関する一般道路用設定値「B」は初期値の60秒)。
【0047】
図4に戻り、次に、事前設定値比較部241は、ステップS163において、地図データ保持領域121内の地図データから取得される一般道路の信号機位置情報から、当該区間(測定区間)における一般道路(図中、「一般道」と略記)に信号機があるか否を判定する。このステップS163における判定の結果が否定的であった場合には、処理はステップS165へ移行する。一方、ステップS163における判定の結果が肯定的であった場合には、ステップS164において、事前設定値比較部241は、信号機位置情報により示される具体的な信号機の設置地点数に応じた時間を、事前設定値記憶領域122に記憶されている一般道路用設定値「B」に加算し、新たな一般道路用設定値「B」とする。この後、処理はステップS163へ移行する。図5Bには、一般道路PUBの実際の信号機の設置地点数(3地点)に応じて、一般道路用設定値「B」が90秒(1地点あたり10秒加算)に設定された場合の例が示されている(高速道路EXPに関する高速道路用設定値「A」は初期値の60秒)。
【0048】
図4に戻り、次に、事前設定値比較部241は、ステップS165において、FM多重放送受信ユニット180を通じて取得される高速道路の渋滞情報から、当該区間(測定区間)における一般道路(図中、「一般道」と略記)に渋滞があるか否を判定する。このステップS165における判定の結果が否定的であった場合には、道路種別判定重みづけ処理S16の処理が終了する。一方、ステップS165における判定の結果が肯定的であった場合には、ステップS166において、事前設定値比較部241は、渋滞情報により示される具体的な渋滞状況に応じた時間を、事前設定値記憶領域122に記憶されている一般道路用設定値「B」に加算して、新たな一般道路用設定値「B」とする。この後、道路種別判定重みづけ処理S16の処理が終了する。図5Cには、一般道路PUBの実際の渋滞状況に応じて、一般道路用設定値「B」が通常の2倍の120秒に設定された場合の例が示されている(高速道路EXPに関する一般道路用設定値「A」は初期値の60秒)。
【0049】
以上のステップS161(S162)、S163(S164)及びS165(S166)の実行順序は任意である。なお、図5Dには、上記各例に示した状況が全て生じた場合の例が示されている。
【0050】
そして、以上のステップS161〜S166の実行により、道路種別判定重みづけ処理S16が完遂すると、処理は道路種別判定/リルート処理S10に復帰する。引き続き、図3に示されるステップS17において、事前設定値比較部241が、事前設定値記憶領域122に記憶された高速道路用設定値「A」が一般道路用設定値「B」以下(A≦B)であるか否かを判定する。
【0051】
ステップS17における判定の結果が否定的であり、事前設定値記憶領域122に記憶された高速道路用設定値「A」が一般道路用設定値「B」を超えていた(A>B)場合、高速道路における予想される走行時間が一般道路のそれよりも大きく(時間がかかり)、道路種別の判定が事実上困難であると判断する。そして、所要の道路種別の判定及びリルート処理を共に行うことなく道路種別判定/リルート処理S10が終了する。
【0052】
一方、ステップS17における判定の結果が肯定的であり、高速道路用設定値「A」が一般道路用設定値「B」以下であった場合には、処理はステップS18へ移行する。このステップS18において、事前設定値比較部241は、測定区間における車両の走行時間が一般道路用設定値「B」以上(走行時間≧B)であるか否かを更に判定する。
【0053】
ステップS18における判定の結果が否定的であり、車両の走行時間が一般道路用設定値「B」未満であった(走行時間<B)場合、事前設定値判定部242は、ステップS22において、車両が高速道路を走行中であると判定する。引き続き、前述のステップS23以降の処理が実行される。この後、道路種別判定/リルート処理S10が終了する。
【0054】
一方、ステップS18における判定の結果が肯定的であり、車両の走行時間が一般道路用設定値「B」以上であった場合には、処理はステップS19へ移行する。このステップS19において、事前設定値判定部242は、車両が一般道路を走行中であると判定する。引き続き、事前設定値判定部242は、ステップS20において、車両のマップマッチングが実際に一般道路に対して行われているか否かを判定する。
【0055】
ステップS20における判定の結果が肯定的であった場合には、リルート処理を行うことなく道路種別判定/リルート処理S10が終了する。一方、ステップS20における判定の結果が否定的であった場合には、処理は、ステップS21へ移行する。このステップS21において、リルート処理部250は、現在の車両の位置が一般道路上にあることを前提としたリルート処理を行った後に、道路種別判定/リルート処理S10が終了する。
【0056】
以上、道路種別判定/リルート処理S10を説明したが、本説明では、道路種別判定重みづけ処理S16において高速道路用設定値「A」及び一般道路用設定値「B」が、道路状況や交通状況により変化する場合を想定した。これに対し、これら高速道路用設定値「A」及び一般道路用設定値「B」を初期値(閾値)から変化させずに、すなわち、道路状況や交通状況を考慮せずに道路種別の判定を行ってもよい。この場合、ステップS15において車両が測定区間の終点に到達したと判断すると、ステップS16における道路種別判定重みづけ処理を行わずにステップS17へ移行する。すなわち、高速道路用設定値「A」及び一般道路用設定値「B」は初期値(閾値)から変化することなくステップS17へ移行する。従って、ステップS18において走行時間との比較の対象とされる一般道路用設定値「B」は、自ずと閾値(例えば60秒)に等しくなり(高速道路用設定値「A」も同様)、ステップS19及びS22における道路種別の判定は、ステップS18において、走行時間と閾値との大小関係のみに基づいて行われることになる。
【0057】
[作用効果]
以上説明したように、本実施形態では、道路隣接判定部210が、地図データ保持領域121内の地図データを参照することにより、走行中の車両が高速道路と一般道路との並行隣接区間に到達したか否かを判定し、その判定結果が肯定的であった場合に、走行時間計測部220が、並行隣接区間内に車両の走行時間を計測するための測定区間を設定して、車両が測定区間を走行するのに実際に要した時間を計測し、道路種別判定部240が、その計測された走行時間と、測定区間における交通状況、すなわち、(i)地図データから取得可能な一般道路における信号機位置情報(信号機の設置地点数)、及び(ii)FM多重放送受信ユニット180から取得可能な高速道路及び一般道路における渋滞情報(渋滞状況)を考慮して設定された高速道路用設定値「A」及び一般道路設定値「B」とを利用して、車両が走行している道路種別が高速道路又は一般道路のいずれであるかを判定するようにしている。
【0058】
このため、正確なルート案内に要求される道路種別の判定が、従来のように、レーダ、カメラ、電波ビーコン受信機等といった特殊な外部機器を使用することなく、ナビゲーション装置100の必須構成要素とされている「地図データ検索表示機能」及び「FM多重放送受信機能」のみにより行うことが可能となり、その結果、主にプログラム構成を変更するだけで、所要のナビゲーション装置100を構成する際に大幅なコストダウンを図ることが可能となる。
【0059】
[実施形態の変形]
本発明は、上記の実施形態に限定されるものではなく、様々な変形が可能である。
【0060】
例えば、上記の実施形態では、道路種別判定/リルート処理S10の道路種別判定重みづけ処理S16において、高速道路用設定値「A」及び一般道路用設定値「B」が変化しない状況があり得ることを考慮し、ステップS18において走行時間との比較の対象とされる事前設定値として一般道路用設定値「B」を選定したが、場合によっては、高速道路用設定値「A」を比較対象とすることも可能である。この場合、事前設定値比較部241に、測定区間における車両の走行時間が高速道路用設定値「A」以上(走行時間≧A)であるか否かを判定させるようにすればよい(A〜Bの範囲に含まれる任意値を比較対象値とすることも可能)。
【0061】
また、上記の実施形態では、閾値を固定データとして扱ったが、道路種別判定重みづけ処理S16において高速道路用設定値「A」及び一般道路用設定値「B」を変化させるのではなく、場合により、その閾値自身を、FM多重放送受信ユニット180で受信されたFM多重放送から抽出され取得される一般道路の渋滞情報に基づき、この渋滞情報により示される渋滞状況を考慮した値に直接設定したり、あるいは、地図データ保持領域121に保持された地図データから取得される一般道路の信号機位置情報に基づき、この信号機位置情報により示される信号機の設置地点数を考慮した値に直接設定することなども可能である。
【0062】
また、上記の実施形態では、制御ユニット110における各機能を、対応するプログラムを実行することにより実現したが、その一部又は全てを、ファームウエアの実装等をしたハードウエアによって実現することもできる。
【0063】
また、上記の実施形態では、車載のナビゲーション装置に本発明を適用した例を挙げて説明したが、車両に乗車する利用者が携帯することができる携帯型装置であるPDA(Personal Digital Assistant)、携帯電話端末、PHS(Personal Handyphone System)端末、携帯型パーソナルコンピュータ等に搭載されるナビゲーション装置にも本発明を適用することができる。
【図面の簡単な説明】
【0064】
【図1】本発明の一実施形態に係るナビゲーション装置の構成を概略的に示すブロック図である。
【図2】図1の制御ユニットにおいて実行されるプログラムの構成を説明するためのブロック図である。
【図3】一実施形態に適用される道路種別判定/リルート処理を説明するためのフローチャートである。
【図4】図3の道路種別判定重みづけ処理を説明するためのフローチャートである。
【図5A】図4の道路種別判定重みづけ処理における高速道路用設定値及び一般道路用設定値への重みづけの例(その1)を示す図である。
【図5B】図4の道路種別判定重みづけ処理における高速道路用設定値及び一般道路用設定値への重みづけの例(その2)を示す図である。
【図5C】図4の道路種別判定重みづけ処理における高速道路用設定値及び一般道路用設定値への重みづけの例(その3)を示す図である。
【図5D】図4の道路種別判定重みづけ処理における高速道路用設定値及び一般道路用設定値への重みづけの例(その4)を示す図である。
【符号の説明】
【0065】
100…ナビゲーション装置
110…制御ユニット(演算手段)
121…地図データ保持領域
122…事前設定値記憶領域
180…FM多重放送受信ユニット
210…道路隣接判定部(道路隣接判定手段)
220…走行時間計測部(走行時間計測手段)
230…信号機通過判定部(信号機通過判定手段)
240…道路種別判定部(第1及び第2の道路種別判定手段)
241…事前設定値比較部(閾値比較手段、第1及び第2の道路用設定値比較手段)
242…事前設定値判定部(閾値判定手段、道路用設定値判定手段)
250…リルート処理部(リルート処理手段)
【特許請求の範囲】
【請求項1】
地図データを参照することにより、走行中の移動体が高速道路と一般道路との並行隣接区間に到達したか否かを判定する道路隣接判定手段と;
前記道路隣接判定手段における判定結果が肯定的であった場合に、前記並行隣接区間内に前記移動体の走行時間を計測するための測定区間を設定し、前記移動体が前記測定区間を走行するのに実際に要した時間を計測する走行時間計測手段と;
前記走行時間計測手段で計測された走行時間と、前記測定区間における交通状況を考慮して設定された少なくとも1つの事前設定値とを利用して、前記移動体が走行している道路種別が前記高速道路又は前記一般道路のいずれであるかを判定する第1の道路種別判定手段と;を備えることを特徴とするナビゲーション装置。
【請求項2】
前記少なくとも1つの事前設定値には、前記道路種別を判定するための閾値が含まれ、
前記第1の道路種別判定手段は、前記走行時間と前記閾値とに基づいて前記道路種別を判定する、ことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記第1の道路種別判定手段は、
前記走行時間と前記閾値との大小関係を比較する閾値比較手段と;
前記閾値比較手段による比較の結果、前記走行時間が前記閾値よりも小さかった場合には、前記移動体が前記高速道路を走行中であると判定し、大きかった場合には、前記移動体が前記一般道路を走行中であると判定する閾値判定手段と;を備えることを特徴とする請求項2に記載のナビゲーション装置。
【請求項4】
前記閾値は、前記測定区間に関してFM多重放送を通じて取得される前記一般道路の渋滞情報に基づき、前記渋滞情報により示される渋滞状況を考慮した値に設定される、ことを特徴とする請求項2又は3に記載のナビゲーション装置。
【請求項5】
前記閾値は、前記測定区間に関して前記地図データから取得される前記一般道路の信号機位置情報に基づき、前記信号機位置情報により示される信号機の設置地点数を考慮した値に設定される、ことを特徴とする請求項2〜4のいずれか一項に記載のナビゲーション装置。
【請求項6】
前記少なくとも1つの事前設定値には、前記測定区間における前記高速道路及び前記一般道路の各交通状況に応じてそれぞれ可変的に設定された高速道路用設定値及び一般道路用設定値が含まれ、
前記第1の道路種別判定手段は、
前記高速道路用設定値と前記一般道路用設定値との大小関係を比較する第1の道路用設定値比較手段と;
前記第1の道路用設定値比較手段による比較の結果、前記高速道路用設定値が前記一般道路用設定値以下であった場合に、前記走行時間と前記一般道路用設定値との大小関係を更に比較する第2の道路用設定値比較手段と;
前記第2の道路用設定値比較手段による比較の結果、前記走行時間が前記一般道路用設定値よりも小さかった場合には、前記移動体が前記高速道路を走行中であると判定し、大きかった場合には、前記移動体が前記一般道路を走行中であると判定する道路用設定値判定手段と;を備えることを特徴とする請求項1又は2に記載のナビゲーション装置。
【請求項7】
前記第1の道路種別判定手段は、前記第1の道路用設定値比較手段による比較の結果、前記高速道路用設定値が前記一般道路用設定値を超えた場合には、前記道路種別の判定を行わない、ことを特徴とする請求項6に記載のナビゲーション装置。
【請求項8】
前記高速道路用設定値は、前記測定区間に関してFM多重放送を通じて取得される前記高速道路の渋滞情報に基づき、前記渋滞情報により示される渋滞状況を考慮した値に設定される、ことを特徴とする請求項6又は7に記載のナビゲーション装置。
【請求項9】
前記一般道路用設定値は、前記測定区間に関してFM多重放送を通じて取得される前記一般道路の渋滞情報に基づき、前記渋滞情報により示される渋滞状況を考慮した値に設定される、ことを特徴とする請求項6〜8のいずれか一項に記載のナビゲーション装置。
【請求項10】
前記一般道路用設定値は、前記測定区間に関して前記地図データから取得される前記一般道路の信号機位置情報に基づき、前記信号機位置情報により示される信号機の設置地点数を考慮した値に設定される、ことを特徴とする請求項6〜9のいずれか一項に記載のナビゲーション装置。
【請求項11】
前記測定区間に関して前記地図データから取得される信号機位置情報に基づき、前記信号機位置情報により示される信号機の設置地点を前記移動体が所定数以上連続して停止せず通過したか否かを判定する信号機通過判定手段と;
前記信号機通過判定手段における判定結果が肯定的であった場合に、前記移動体が前記高速道路を走行中であると判定する第2の道路種別判定手段と;を更に備えることを特徴とする請求項1〜10のいずれか一項に記載のナビゲーション装置。
【請求項12】
前記第1又は第2の道路種別判定手段における判定結果と前記移動体のマップマッチングの状態とが異なる場合に、リルート処理を実行するリルート処理手段を更に備える、ことを特徴とする請求項1〜11のいずれか一項に記載のナビゲーション装置。
【請求項13】
地図データを参照することにより、走行中の移動体が高速道路と一般道路との並行隣接区間に到達したか否かを判定する道路隣接判定工程と;
前記道路隣接判定工程における判定結果が肯定的であった場合に、前記並行隣接区間内に前記移動体の走行時間を計測するための測定区間を設定し、前記移動体が前記測定区間を走行するのに実際に要した時間を計測する走行時間計測工程と;
前記走行時間計測工程で計測された走行時間と、前記測定区間における交通状況を考慮して設定された少なくとも1つの事前設定値とを利用して、前記移動体が前記高速道路又は前記一般道路のいずれを走行しているかを判定する道路種別判定工程と;を備えることを特徴とするナビゲーション方法。
【請求項14】
請求項13に記載のナビゲーション方法をナビゲーション装置の演算手段に実行させる、ことを特徴とするナビゲーションプログラム。
【請求項15】
請求項14に記載のナビゲーションプログラムがナビゲーション装置の演算手段により読み取り可能に記録されている、ことを特徴とするナビゲーションプログラムを記録した記録媒体。
【請求項1】
地図データを参照することにより、走行中の移動体が高速道路と一般道路との並行隣接区間に到達したか否かを判定する道路隣接判定手段と;
前記道路隣接判定手段における判定結果が肯定的であった場合に、前記並行隣接区間内に前記移動体の走行時間を計測するための測定区間を設定し、前記移動体が前記測定区間を走行するのに実際に要した時間を計測する走行時間計測手段と;
前記走行時間計測手段で計測された走行時間と、前記測定区間における交通状況を考慮して設定された少なくとも1つの事前設定値とを利用して、前記移動体が走行している道路種別が前記高速道路又は前記一般道路のいずれであるかを判定する第1の道路種別判定手段と;を備えることを特徴とするナビゲーション装置。
【請求項2】
前記少なくとも1つの事前設定値には、前記道路種別を判定するための閾値が含まれ、
前記第1の道路種別判定手段は、前記走行時間と前記閾値とに基づいて前記道路種別を判定する、ことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記第1の道路種別判定手段は、
前記走行時間と前記閾値との大小関係を比較する閾値比較手段と;
前記閾値比較手段による比較の結果、前記走行時間が前記閾値よりも小さかった場合には、前記移動体が前記高速道路を走行中であると判定し、大きかった場合には、前記移動体が前記一般道路を走行中であると判定する閾値判定手段と;を備えることを特徴とする請求項2に記載のナビゲーション装置。
【請求項4】
前記閾値は、前記測定区間に関してFM多重放送を通じて取得される前記一般道路の渋滞情報に基づき、前記渋滞情報により示される渋滞状況を考慮した値に設定される、ことを特徴とする請求項2又は3に記載のナビゲーション装置。
【請求項5】
前記閾値は、前記測定区間に関して前記地図データから取得される前記一般道路の信号機位置情報に基づき、前記信号機位置情報により示される信号機の設置地点数を考慮した値に設定される、ことを特徴とする請求項2〜4のいずれか一項に記載のナビゲーション装置。
【請求項6】
前記少なくとも1つの事前設定値には、前記測定区間における前記高速道路及び前記一般道路の各交通状況に応じてそれぞれ可変的に設定された高速道路用設定値及び一般道路用設定値が含まれ、
前記第1の道路種別判定手段は、
前記高速道路用設定値と前記一般道路用設定値との大小関係を比較する第1の道路用設定値比較手段と;
前記第1の道路用設定値比較手段による比較の結果、前記高速道路用設定値が前記一般道路用設定値以下であった場合に、前記走行時間と前記一般道路用設定値との大小関係を更に比較する第2の道路用設定値比較手段と;
前記第2の道路用設定値比較手段による比較の結果、前記走行時間が前記一般道路用設定値よりも小さかった場合には、前記移動体が前記高速道路を走行中であると判定し、大きかった場合には、前記移動体が前記一般道路を走行中であると判定する道路用設定値判定手段と;を備えることを特徴とする請求項1又は2に記載のナビゲーション装置。
【請求項7】
前記第1の道路種別判定手段は、前記第1の道路用設定値比較手段による比較の結果、前記高速道路用設定値が前記一般道路用設定値を超えた場合には、前記道路種別の判定を行わない、ことを特徴とする請求項6に記載のナビゲーション装置。
【請求項8】
前記高速道路用設定値は、前記測定区間に関してFM多重放送を通じて取得される前記高速道路の渋滞情報に基づき、前記渋滞情報により示される渋滞状況を考慮した値に設定される、ことを特徴とする請求項6又は7に記載のナビゲーション装置。
【請求項9】
前記一般道路用設定値は、前記測定区間に関してFM多重放送を通じて取得される前記一般道路の渋滞情報に基づき、前記渋滞情報により示される渋滞状況を考慮した値に設定される、ことを特徴とする請求項6〜8のいずれか一項に記載のナビゲーション装置。
【請求項10】
前記一般道路用設定値は、前記測定区間に関して前記地図データから取得される前記一般道路の信号機位置情報に基づき、前記信号機位置情報により示される信号機の設置地点数を考慮した値に設定される、ことを特徴とする請求項6〜9のいずれか一項に記載のナビゲーション装置。
【請求項11】
前記測定区間に関して前記地図データから取得される信号機位置情報に基づき、前記信号機位置情報により示される信号機の設置地点を前記移動体が所定数以上連続して停止せず通過したか否かを判定する信号機通過判定手段と;
前記信号機通過判定手段における判定結果が肯定的であった場合に、前記移動体が前記高速道路を走行中であると判定する第2の道路種別判定手段と;を更に備えることを特徴とする請求項1〜10のいずれか一項に記載のナビゲーション装置。
【請求項12】
前記第1又は第2の道路種別判定手段における判定結果と前記移動体のマップマッチングの状態とが異なる場合に、リルート処理を実行するリルート処理手段を更に備える、ことを特徴とする請求項1〜11のいずれか一項に記載のナビゲーション装置。
【請求項13】
地図データを参照することにより、走行中の移動体が高速道路と一般道路との並行隣接区間に到達したか否かを判定する道路隣接判定工程と;
前記道路隣接判定工程における判定結果が肯定的であった場合に、前記並行隣接区間内に前記移動体の走行時間を計測するための測定区間を設定し、前記移動体が前記測定区間を走行するのに実際に要した時間を計測する走行時間計測工程と;
前記走行時間計測工程で計測された走行時間と、前記測定区間における交通状況を考慮して設定された少なくとも1つの事前設定値とを利用して、前記移動体が前記高速道路又は前記一般道路のいずれを走行しているかを判定する道路種別判定工程と;を備えることを特徴とするナビゲーション方法。
【請求項14】
請求項13に記載のナビゲーション方法をナビゲーション装置の演算手段に実行させる、ことを特徴とするナビゲーションプログラム。
【請求項15】
請求項14に記載のナビゲーションプログラムがナビゲーション装置の演算手段により読み取り可能に記録されている、ことを特徴とするナビゲーションプログラムを記録した記録媒体。
【図1】


【図2】
【図3】
【図4】
【図5A】
【図5B】
【図5C】
【図5D】
【図2】
【図3】
【図4】
【図5A】
【図5B】
【図5C】
【図5D】
【公開番号】特開2007−93393(P2007−93393A)
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願番号】特願2005−283350(P2005−283350)
【出願日】平成17年9月29日(2005.9.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願日】平成17年9月29日(2005.9.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
[ Back to top ]