
ナビゲーション装置、ナビゲーション方法、およびプログラム
【課題】誘導経路として採用された経路が、誘導経路として採用されなかった他の経路と比較してより適切であったか否かを検証するために必要な情報を提供可能なナビゲーション装置20を提供する。
【解決手段】本発明のナビゲーション装置20は、渋滞レベル情報保持部200と、渋滞情報受信部201と、現在位置算出部206と、経路探索部207と、経路誘導部208と、車両が出発地点を出発してからの時間の経過に応じて、誘導経路以外のそれぞれの経路に含まれるそれぞれのリンクにおいて、当該リンクに車両が進入したと推定される時点での、当該リンクの最新の渋滞情報に含まれている所要時間に対する、当該リンクに車両が進入したと推定される時点からの経過時間の割合に応じて、当該リンク上に車両の仮想位置を推定する仮想位置推定部205と、それぞれの仮想位置を表示する仮想位置表示部204とを備える。
【解決手段】本発明のナビゲーション装置20は、渋滞レベル情報保持部200と、渋滞情報受信部201と、現在位置算出部206と、経路探索部207と、経路誘導部208と、車両が出発地点を出発してからの時間の経過に応じて、誘導経路以外のそれぞれの経路に含まれるそれぞれのリンクにおいて、当該リンクに車両が進入したと推定される時点での、当該リンクの最新の渋滞情報に含まれている所要時間に対する、当該リンクに車両が進入したと推定される時点からの経過時間の割合に応じて、当該リンク上に車両の仮想位置を推定する仮想位置推定部205と、それぞれの仮想位置を表示する仮想位置表示部204とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両等の移動体に搭載され、誘導経路以外の経路の走行をシミュレートする技術に関する。
【背景技術】
【0002】
下記の特許文献1には、複数の経路を探索し、出発前に、その時点での各経路の渋滞情報に基づいて、複数の経路のそれぞれについて走行シミュレーションを行う技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−24387号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記特許文献1に開示されている技術では、ある時点での渋滞情報を、経路上の全てのリンクに対して適用している。しかし、実際には、その経路を走行している間にも、その先の渋滞状況は時々刻々と変化しており、必ずしも正しいシミュレーション結果が得られない場合がある。
【0005】
また、経路探索時の渋滞状況等に基づいて、探索された複数の経路の1つを誘導経路として決定し、当該誘導経路を走行して目的地点に到達した場合であっても、その後の渋滞状況の変化により、採用されなかった他の経路の方が目的地点に早く到達することができた可能性もある。そのため、実際に誘導経路上を走行している最中に、その時々のリアルタイムの渋滞情報を使用して、他の経路を走行したと仮定した場合の車両の仮想位置を算出して車両の現在位置と共に表示することができれば、誘導経路として採用された経路が最適であったか否かをその都度あるいは目的地点に到着した後に検証することができる。
【0006】
本発明は上記事情を鑑みてなされたものであり、本発明の目的は、誘導経路として採用された経路が、誘導経路として採用されなかった他の経路と比較してより適切であったか否かをその都度あるいは目的地点に到着した後に検証するために必要な情報を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、第1の発明は、目的地までの経路を探索する経路探索手段と、経路探索手段で探索された経路の交通情報を取得する交通情報取得手段と、交通情報取得手段で取得した交通情報を利用し、所定の開始時点から実際の時間経過に応じて経路上を移動する仮想位置を推定する仮想位置推定手段と、経路および仮想位置を表示する表示手段とを備えることを特徴とするナビゲーション装置を提供する。
【0008】
また、第2の発明は、移動体の現在位置を検出する位置検出手段と、目的地までの複数の経路を探索する経路探索手段と、探索手段で探索された複数の経路のうち、位置検出手段で検出された現在位置が移動する誘導経路を選別する選別手段と、探索手段で探索された複数の経路のうち、誘導経路以外の経路の交通情報を取得する交通情報取得手段と、交通情報取得手段で取得した交通情報を利用し、現在位置が誘導経路上の移動を開始した時点から実際の時間経過に応じて誘導経路以外の経路上を移動する仮想位置を推定する仮想位置推定手段と、経路、現在位置、および仮想位置を表示する表示手段とを備えることを特徴とするナビゲーション装置を提供する。
【0009】
また、第3の発明は、移動体の現在位置を検出する位置検出ステップと、目的地までの複数の経路を探索する経路探索ステップと、探索ステップで探索された複数の経路のうち、位置検出手段で検出された現在位置が存在する誘導経路を選別する選別ステップと、探索ステップで探索された複数の経路のうち、誘導経路以外の経路の交通情報を取得する交通情報取得ステップと、現在位置が誘導経路上の移動を開始した時点から実際の時間経過に応じて、交通情報取得ステップで取得した交通情報を利用し、誘導経路以外の経路上を移動する仮想位置を推定する仮想位置推定ステップと、経路、現在位置、および仮想位置を表示する表示ステップとを備えることを特徴とするナビゲーション方法を提供する。
【0010】
また、第4の発明は、コンピュータをナビゲーション装置として機能させるプログラムであって、移動体の現在位置を検出する位置検出部と、目的地までの複数の経路を探索する経路探索部と、探索部で探索された複数の経路のうち、位置検出手段で検出された現在位置が存在する誘導経路を選別する選別部と、探索部で探索された複数の経路のうち、誘導経路以外の経路の交通情報を取得する交通情報取得部と、現在位置が誘導経路上の移動を開始した時点から実際の時間経過に応じて、交通情報取得部で取得した交通情報を利用し、誘導経路以外の経路上を移動する仮想位置を推定する仮想位置推定部と、経路、現在位置、および仮想位置を表示させる表示制御部とを備えることを特徴とするプログラムを提供する。
【発明の効果】
【0011】
本発明のナビゲーション装置によれば、誘導経路として採用された経路が、誘導経路として採用されなかった他の経路と比較してより適切であったか否かをその都度あるいは事後的に検証するために必要な情報を提供することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施形態にかかるナビゲーションシステム10の構成の一例を示すシステム構成図である。
【図2】リンクデータ保持部209に格納されるデータの構造の一例を示す図である。
【図3】渋滞レベル情報保持部200に格納されるデータの構造の一例を示す図である。
【図4】信頼度保持部203に格納されるデータの構造の一例を示す図である。
【図5】経路探索部207によって探索された複数の経路の一例を示す概念図である。
【図6】仮想位置推定部205による仮想位置の算出過程の一例を説明するための概念図である。
【図7】仮想位置推定部205による仮想位置の算出過程の一例を説明するための概念図である。
【図8】仮想位置推定部205による仮想位置の算出過程の一例を説明するための概念図である。
【図9】走行位置比較画面40の一例を示す概念図である。
【図10】仮想位置算出処理の一例を示すフローチャートである。
【図11】信頼度算出処理の一例を示すフローチャートである。
【図12】渋滞レベル情報表示処理の一例を示すフローチャートである。
【図13】ナビゲーション装置20の機能を実現するコンピュータ50の一例を示すハードウェア構成図である。
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態について説明する。
【0014】
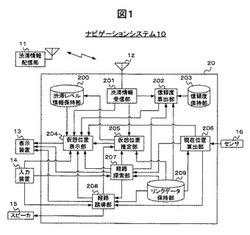
図1は、本発明の一実施形態にかかるナビゲーションシステム10の構成の一例を示すシステム構成図である。ナビゲーションシステム10は、アンテナ12、表示装置13、入力装置14、スピーカ15、センサ16、およびナビゲーション装置20を備える。ナビゲーション装置20は、渋滞レベル情報保持部200、渋滞情報受信部201、信頼度算出部202、信頼度保持部203、仮想位置表示部204、仮想位置推定部205、現在位置算出部206、経路探索部207、経路誘導部208、およびリンクデータ保持部209を有する。
【0015】
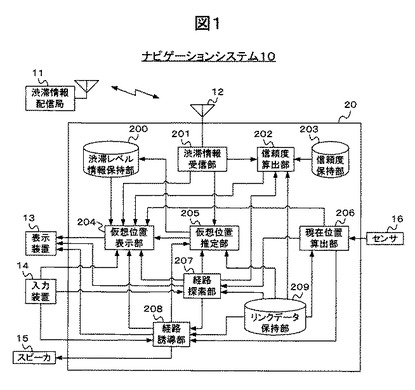
リンクデータ保持部209は、例えば図2に示すように、道路を示すリンクに関する情報を含むリンクテーブル2090が所定の地図領域を示すメッシュ毎に予め保持している。それぞれのリンクテーブル2090には、それぞれのメッシュを識別するメッシュID2091およびメッシュ内のリンクに関するデータであるリンクデータ2092等が含まれる。
【0016】
それぞれのリンクデータ2092には、それぞれのリンクを識別するリンクID2093、当該リンクの開始ノード座標2094、当該リンクの終了ノード座標2095、当該リンクの道路種別2096、当該リンクのリンク長2097、当該リンクの開始ノードに接続されている他のリンクの識別情報である開始接続リンク2098、当該リンクの終了ノードに接続されている他のリンクの識別情報である終了接続リンク2099、当該リンクの旅行時間2100、および当該リンクの法定速度2101等が格納されている。なお、リンクデータ保持部209は、リンクデータの他に、地図データも予め保持している。
【0017】
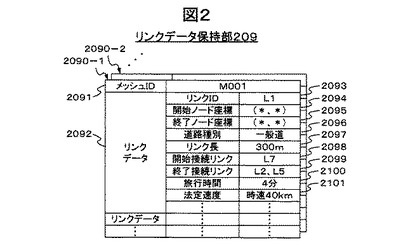
渋滞レベル情報保持部200は、例えば図3に示すように、リンクID2000毎に、当該リンクID2000に対応するリンクの少なくとも一部が含まれる経路を識別する経路ID2001、および、当該リンク上に後述する車両の仮想位置を算出する際に用いられた渋滞情報に含まれていた渋滞レベル情報2002を保持する。渋滞レベル情報としては、例えば、渋滞の程度に応じて、「渋滞」、「混雑」、および「渋滞なし」の3段階がある。
【0018】
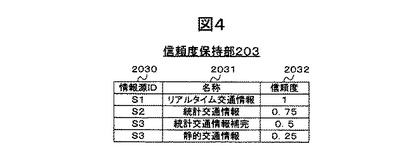
信頼度保持部203は、例えば図4に示すように、渋滞情報の情報源を識別する情報源ID2030毎に、当該情報源の名称2031、および、当該情報源の信頼度2032を予め保持している。本実施形態において、渋滞情報の情報源としては、例えば、プローブカーからの情報を基に渋滞情報配信局11側でリアルタイムに算出された交通情報(リアルタイム交通情報)、プローブカーからの情報以外の情報(道路に設置されたセンサからの情報等)を基に渋滞情報配信局11側で算出された交通情報(統計交通情報)、センサ等が設置されていない道路について他の道路の交通情報から渋滞情報配信局11側で算出された交通情報(統計交通情報補完)、および、ある時点までの交通量の変化の実測値や予測値に基づいて算出され、リンク毎にリンクデータ保持部209に格納されている交通情報(静的交通情報)の4種類を想定している。
【0019】
本実施形態では、「リアルタイム交通情報」の信頼度が最も高く、「統計交通情報」、「統計交通情報補完」、「静的交通情報」の順に信頼度が低くなっている。最も信頼度の高い「リアルタイム交通情報」を常に用いることができれば高い精度での経路予測が可能であるが、少なくとも1台のプローブカーが対象となるリンクを走行している必要がある等、必要な条件が多いため、どのリンクについても常に「リアルタイム交通情報」を用いることができるとは限らない。また、「統計交通情報」についても、全ての道路にセンサが設置されているとは限らないため、どのリンクについても常に「統計交通情報」を用いることができるとは限らない。そのため、ナビゲーション装置20は、対象となるリンクについて用いることができる交通情報の中で、最も信頼度の高い交通情報を用いることとしている。
【0020】
センサ16は、例えばGPS(Global Positioning System)受信機や方位センサ、距離センサ、車速センサ等であり、測地衛星から送信されたGPS信号や、車両の進行方位、車両の移動距離、車速等を測定し、測定情報を現在位置算出部206に供給する。
【0021】
現在位置算出部206は、センサ16から供給された測定情報およびリンクデータ保持部209に格納されたリンクデータに基づいて、ナビゲーション装置20が搭載された車両が所定距離(例えば10m)移動する毎に、例えばマップマッチング等により当該車両の現在位置を算出し、算出した車両の現在位置を示す情報を仮想位置表示部204、経路探索部207、および経路誘導部208に提供する。
【0022】
経路探索部207は、出発地点、目的地点、および経由地点の座標や、探索条件等を含む探索情報を、タッチパネル等の入力装置14を介してユーザから受け付けた場合に、リンクデータ保持部209内のリンクデータを参照し、当該探索情報に基づいて、例えばダイクストラ法等のアルゴリズムを用いて、経由地点を通り出発地点から目的地点へ至る経路を探索し、探索結果を表示装置13に表示する。
【0023】
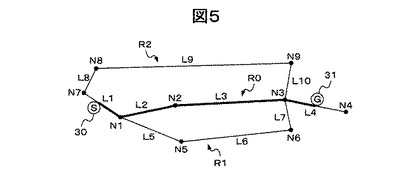
本実施形態では、例えば図5に示すように、出発地点30から目的地点31までの経路が経路探索部207によって3本探索されたものと仮定する。リンクL1の一部、リンクL2、リンクL3、およびリンクL4の一部を通る経路を経路R0とし、リンクL1の一部、リンクL5、リンクL6、リンクL7、およびリンクL4の一部を通る経路を経路R1とし、リンクL1の一部、リンクL8、リンクL9、リンクL10、およびリンクL4の一部を通る経路を経路R2とする。
【0024】
経路探索部207は、探索した経路の中で、入力装置14を介してユーザから指定された経路を誘導経路として、当該誘導経路を経路誘導部208へ送る。また、経路探索部207は、当該誘導経路と共に、誘導経路として採用されなかった他の経路をそれぞれの経路の経路IDに対応付けて信頼度算出部202、仮想位置表示部204、および仮想位置推定部205へ送る。本実施形態においては、例えば図5に示すように、経路R0が誘導経路として指定されたものと仮定する。なお、経路探索部207は、車両の現在位置を出発地点として経路探索を実行してもよい。
【0025】
経路誘導部208は、経路探索部207から誘導経路を示す情報を受け取った後に、車両の出発を検出した場合に、リンクデータ保持部209に格納されている、車両の現在位置付近の地図データを取得し、取得した地図データで示される地図上に車両の現在位置を示すカーマークを表示することにより、経路誘導を開始すると共に、経路誘導の開始を仮想位置推定部205に通知する。経路誘導部208は、例えば、経路探索部207から誘導経路を示す情報を受け取った後に、車両の現在位置が所定距離以上移動した場合に、車両が出発したと判定する。
【0026】
また、経路誘導部208は、車両が目的地点に到着した場合に、その旨を仮想位置表示部204に通知する。例えば、目的地点から所定距離(例えば100m)以内の範囲に車両の現在位置が進入した場合に、経路誘導部208は、車両が目的地点に到着したと判定する。
【0027】
また、経路誘導部208は、現在位置算出部206によって算出された車両の現在位置およびリンクデータ保持部209に格納されているリンクデータを参照して、誘導経路上において、車両の前方所定距離以内に、進行方向を指示すべき案内地点が存在する場合に、当該案内地点に関する画像を表示装置13に表示すると共に、誘導を示す音声をスピーカ15を介して再生することにより、進むべき方向を案内する。
【0028】
渋滞情報受信部201は、FM多重放送や電波ビーコン等を介して渋滞情報配信局11から配信される渋滞情報をアンテナ12を介して随時受信し、受信した最新の渋滞情報を保持する。そして、渋滞情報受信部201は、信頼度算出部202、仮想位置表示部204、または仮想位置推定部205から要求があった場合に、保持している最新の渋滞情報を提供する。渋滞情報には、リンクID毎に、当該リンクIDに対応するリンクの所要時間を示す情報、当該リンクにおける渋滞の程度を示す情報、および当該リンクにおける渋滞情報の情報源を示す情報源ID等が含まれている。
【0029】
仮想位置推定部205は、経路誘導部208から誘導経路の開始を通知された場合に、誘導経路R0以外のその他の経路R1およびR2のそれぞれについて、以下の処理を実行する。なお、仮想位置推定部205は、「9:00」に経路誘導部208から誘導経路の開始を通知された、すなわち、車両が実際に出発したものと仮定する。また、以下では、経路R1についての処理を例に説明する。他の経路R2においても同様の処理が行われる。
【0030】
まず、仮想位置推定部205は、出発地点が位置するリンクL1の渋滞情報を渋滞情報受信部201から取得し、取得した渋滞情報に含まれている渋滞レベル情報を、当該リンクL1のリンクIDおよび対象となる経路R1の経路IDに対応付けて渋滞レベル情報保持部200に登録する。
【0031】
なお、前述の「リアルタイム交通情報」、「統計交通情報」、または「統計交通情報補完」のいずれも提供されていないリンクについては、仮想位置推定部205は、例えば、当該リンクの法定速度および旅行時間をリンクデータ保持部209から抽出して、当該リンクの平均速度が法定速度の30%未満である場合には「渋滞」を、30%以上60%未満である場合には「混雑」を、60%以上である場合には「渋滞なし」を、それぞれ渋滞レベル情報として渋滞レベル情報保持部200に登録する。
【0032】
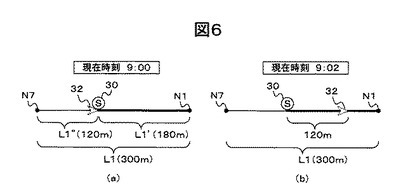
次に、仮想位置推定部205は、車両が出発してからの時間の経過に応じて、出発地点が位置するリンクL1上に、車両が経路R1を走行したと仮定した場合(実際には車両は誘導経路R0上を走行している)の車両の仮想位置32をL1上に算出する。具体的には、仮想位置推定部205は、例えば図6(a)に示すように、出発地点30から、当該出発地点30が位置するリンクL1のノードであって、対象となる経路R1上のノード(図6の例ではノードN1)までの距離L1’を算出する。図6の例では、L1’は180mである。
【0033】
そして、仮想位置推定部205は、出発地点30が位置するリンクL1の渋滞情報に含まれている(ノードN7からノードN1への)所要時間、および、リンクデータ保持部209に格納されているリンクL1のリンク長を参照して、L1’の所要時間を算出する。例えば、リンクL1の渋滞情報に含まれている所要時間が5分であり、リンクL1のリンク長が300mの場合、仮想位置推定部205は、L1’の所要時間を3分と算出する。なお、前述の「リアルタイム交通情報」、「統計交通情報」、または「統計交通情報補完」のいずれも提供されていないリンクについては、仮想位置推定部205は、リンクデータ保持部209内の旅行時間を当該リンクの所要時間として用いる。
【0034】
次に、仮想位置推定部205は、車両が出発してからの時間の経過に応じて、車両の仮想位置32をL1’上に算出する。出発してから2分が経過した「9:02」において、仮想位置推定部205は、例えば図6(b)に示すように、L1’上において出発地点から120mの位置に車両の仮想位置32を算出する。仮想位置推定部205は、各経路について算出した仮想位置の情報を仮想位置表示部204へ送る。
【0035】
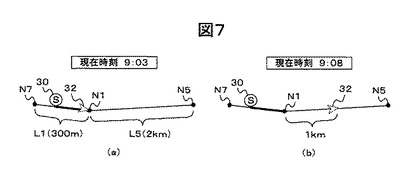
次に、仮想位置推定部205は、出発してから、L1’について算出した所要時間(3分)が経過した場合に(図7(a)参照)、対象となる経路R1上における次のリンクL5の渋滞情報を渋滞情報受信部201から取得する。そして、仮想位置推定部205は、取得した渋滞情報に含まれている渋滞レベル情報を、当該リンクL5のリンクIDおよび経路R1の経路IDに対応付けて渋滞レベル情報保持部200に登録する。
【0036】
そして、仮想位置推定部205は、リンクL5の渋滞情報に含まれている(ノードN1からノードN5への)所要時間、および、リンクデータ保持部209に格納されているリンクL5のリンク長を参照して、車両の仮想位置32がリンクL5に進入してからの時間の経過に応じて、車両の仮想位置32をリンクL5上に算出する。例えば、仮想位置32がリンクL5に進入してから5分が経過した「9:08」において、仮想位置推定部205は、図7(b)に示すように、リンクL5上においてノードN1から1kmの位置に車両の仮想位置32を算出する。この処理は、次のリンクが、目的地点が位置するリンクとなるまで繰り返される。
【0037】
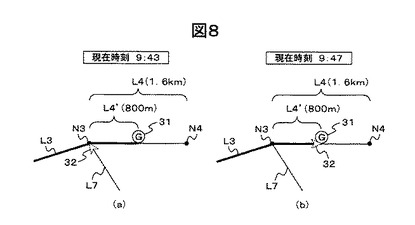
次のリンクに目的地点が位置する場合、仮想位置推定部205は、当該リンクにおいて、対象となる経路R1上のノードから目的地点までの距離を算出し、算出した距離、および、当該リンクの渋滞情報に基づいて、車両の仮想位置が当該リンクに進入してからの時間の経過に応じて、車両の仮想位置を当該リンク上に算出する。
【0038】
具体的には、仮想位置推定部205は、例えば図8(a)に示すように、目的地点31が位置するリンクL4について、ノードN3から目的地点31までの距離L4’を算出する。図8の例では、L4’は800mである。そして、仮想位置推定部205は、リンクL4の渋滞情報に含まれている(ノードN3からノードN4への)所要時間、および、リンクデータ保持部209に格納されているリンクL4のリンク長を参照して、L4’の所要時間を算出する。例えば、リンクL4の渋滞情報に含まれている所要時間が8分であり、リンクL4のリンク長が1.6kmの場合、仮想位置推定部205は、L4’の所要時間を4分と算出する。
【0039】
そして、仮想位置推定部205は、車両の仮想位置32がリンクL4に進入してからの時間の経過に応じて、車両の仮想位置32をL4’上に算出する。車両の仮想位置32がリンクL4に進入してから4分が経過した「9:47」において、仮想位置推定部205は、例えば図8(b)に示すように、目的地点31の位置に仮想位置32を算出する。いずれかの経路上の仮想位置32が目的地点31に到着した場合、仮想位置推定部205は、その旨を仮想位置表示部204に通知する。
【0040】
なお、仮想位置推定部205は、車両が走行中の誘導経路R0についても、車両が進入したリンクの渋滞情報を渋滞情報受信部201から取得し、取得した渋滞情報に含まれている渋滞レベル情報(渋滞情報が提供されていないリンクについてはリンクデータ保持部209の情報を用いて算出した渋滞レベル情報)を、それぞれのリンクのリンクIDに対応付けて渋滞レベル情報保持部200に登録する。
【0041】
信頼度算出部202は、誘導経路を示す情報、および、誘導経路として指定されなかった経路を示す情報を経路探索部207から受け取った場合に、それぞれの経路に少なくとも一部が含まれるリンクの渋滞情報を渋滞情報受信部201から取得する。このとき、信頼度算出部202は、それぞれのリンクについて、最も信頼度の高い情報源の渋滞情報を取得する。なお、渋滞情報が提供されないリンクについては、最も信頼度の低い「静的交通情報」が用いられる。
【0042】
そして、信頼度算出部202は、それぞれのリンクに用いられる渋滞情報の情報源IDに基づいて信頼度保持部203を参照し、それぞれのリンク上に仮想位置を算出する際に用いられる渋滞情報の信頼度を取得する。そして、信頼度保持部203は、それぞれの経路について、以下の処理を実行する。
【0043】
まず、信頼度算出部202は、出発地点が位置しているリンクの渋滞情報に含まれる情報源IDに基づいて信頼度保持部203を参照し、当該リンクの信頼度を抽出する。そして、信頼度算出部202は、出発地点が位置しているリンクにおいて、出発地点から、対象となる経路に含まれる当該リンクのノードまでの当該リンク上の距離を求め、求めた距離と、当該リンクの信頼度とを乗算する。
【0044】
次に、信頼度算出部202は、目的地点が位置しているリンクの渋滞情報に含まれる情報源IDに基づいて信頼度保持部203を参照し、当該リンクの信頼度を抽出する。そして、信頼度算出部202は、目的地点が位置しているリンクにおいて、対象となる経路に含まれる当該リンクのノードから目的地点までの当該リンク上の距離を求め、求めた距離と、当該リンクの信頼度とを乗算する。
【0045】
次に、信頼度算出部202は、出発地点または目的地点のいずれも位置していないリンクであって、対象となる経路に含まれるそれぞれのリンクについて、渋滞情報に含まれる情報源IDに基づいて信頼度保持部203を参照し、当該リンクの信頼度を抽出する。そして、信頼度算出部202は、それぞれのリンクについて長さと信頼度とを乗算する。
【0046】
次に、信頼度算出部202は、各リンクの乗算結果を合計し、合計値を、出発地点から目的地点までの旅行距離で割ることにより、対象となる経路上において仮想位置を算出する際に用いられる渋滞情報の信頼度を算出する。信頼度算出部202は、経路毎に算出した渋滞情報の信頼度を仮想位置表示部204へ送る。
【0047】
なお、それぞれのリンクにおいて用いることができる渋滞情報の情報源が短い期間に変更されることは少ないため、信頼度算出部202は、経路探索部207から誘導経路として指定されなかった経路を示す情報を受け取った後、仮想位置表示部204によって当該信頼度が表示装置13に表示される前であれば、当該経路毎の渋滞情報の信頼度をいつ算出してもよい。
【0048】
仮想位置表示部204は、車両が目的地点に到着した旨を経路誘導部208から通知された場合、いずれかの経路の仮想位置が目的地点に到着した旨を仮想位置推定部205から通知された場合等に、それぞれの経路について、出発地点から仮想位置点までのそれぞれのリンクの渋滞レベル情報を渋滞レベル情報保持部200から取得すると共に、仮想位置から目的地点までのそれぞれのリンクの渋滞レベル情報を渋滞情報受信部201から取得、あるいは、リンクデータ保持部209内の情報から算出する。
【0049】
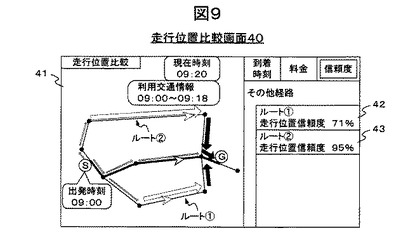
そして、仮想位置表示部204は、車両の現在位置、各仮想位置、誘導経路、および誘導経路として指定されなかった経路を、例えば図9に示すような走行位置比較画面40として表示装置13に表示する。このとき、仮想位置表示部204は、出発地点から仮想位置点までのそれぞれのリンクの渋滞レベル情報を、仮想位置から目的地点までのそれぞれのリンクの渋滞レベル情報とは異なる形態で表示する。異なる形態とは、例えば、異なる色の矢印を用いる、異なる線種(実線と点線等)の矢印を用いる、太さの異なる矢印を用いる、異なるハッチングパターンの矢印を用いる、一方の矢印を点灯させて他方を点滅させる等が考えられる。
【0050】
図9の走行位置比較画面40において、領域41には、出発地点、目的地点、各経路、車両の現在位置、および各仮想位置が、渋滞レベル情報と共に表示される。領域42や領域43には、信頼度算出部202によって算出された、各経路における渋滞情報の信頼度が表示される。図9の走行位置比較画面40では、出発地点から仮想位置点までの渋滞レベル情報を白抜きの矢印で表し、仮想位置から目的地点までの渋滞レベル情報を塗りつぶしの矢印で表示しており、いずれも太さで渋滞の程度を表している。
【0051】
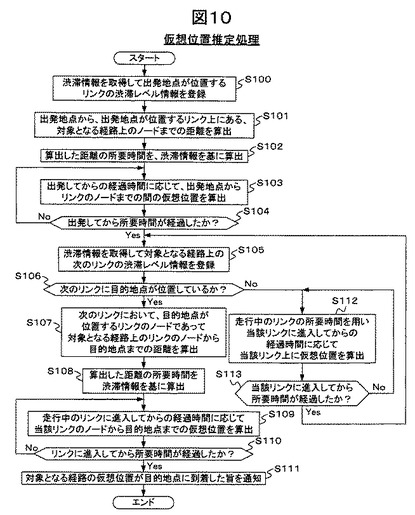
図10は、仮想位置推定部205によって実行される仮想位置推定処理の一例を示すフローチャートである。車両が出発した旨を経路誘導部208から通知された場合に、仮想位置推定部205は、誘導経路以外のそれぞれの経路について本フローチャートに示す仮想位置推定処理を開始する。
【0052】
まず、仮想位置推定部205は、出発地点が位置するリンクの渋滞情報を渋滞情報受信部201から取得し、取得した渋滞情報に含まれている渋滞レベル情報を、当該リンクのリンクIDおよび対象となる経路の経路IDに対応付けて渋滞レベル情報保持部200に登録する(S100)。
【0053】
次に、仮想位置推定部205は、図6(a)で説明したように、出発地点30から、当該出発地点30が位置するリンクL1のノードであって、対象となる経路上のノードN1までの距離L1’を算出する(S101)。そして、仮想位置推定部205は、出発地点30が位置するリンクL1の渋滞情報に含まれているリンクL1の所要時間、および、リンクデータ保持部209に格納されているリンクL1のリンク長を参照して、L1’の所要時間を算出する(S102)。
【0054】
次に、仮想位置推定部205は、車両が出発してからの時間の経過に応じて、車両の仮想位置32をL1’上に算出する(S103)。そして、仮想位置推定部205は、出発してから、L1’について算出した所要時間が経過したか否かを判定する(S104)。出発してから、L1’について算出した所要時間が経過していない場合(S104:No)、仮想位置推定部205は、再びステップS103に示した処理を実行する。
【0055】
図7(a)で説明したように、出発してから、L1’について算出した所要時間が経過した場合(S104:Yes)、仮想位置推定部205は、対象となる経路上における次のリンクの渋滞情報を渋滞情報受信部201から取得し、取得した渋滞情報に含まれている渋滞レベル情報を、当該次のリンクのリンクIDおよび対象となる経路の経路IDに対応付けて渋滞レベル情報保持部200に登録する(S105)。
【0056】
次に、仮想位置推定部205は、当該次のリンクに目的地点が位置しているか否かを判定する(S106)。当該次のリンクに目的地点が位置していない場合(S106:No)、仮想位置推定部205は、当該次のリンクを走行中のリンクとする。そして、仮想位置推定部205は、当該走行中のリンクの渋滞情報に含まれている所要時間、および、リンクデータ保持部209に格納されている当該走行中のリンクのリンク長に基づいて、車両の仮想位置が当該走行中のリンクに進入してからの時間の経過に応じて、車両の仮想位置を当該走行中のリンク上に算出する(S112)。
【0057】
次に、仮想位置推定部205は、走行中のリンクに進入してから、当該走行中のリンクの所要時間が経過したか否かを判定する(S113)。走行中のリンクに進入してから、当該走行中のリンクの所要時間が経過していない場合(S113:No)、仮想位置推定部205は、再びステップS112に示した処理を実行する。走行中のリンクに進入してから、当該走行中のリンクの所要時間が経過した場合(S113:Yes)、仮想位置推定部205は、再びステップS105に示した処理を実行する。
【0058】
ステップS106において、次のリンクに目的地点が位置している場合(S106:Yes)、仮想位置推定部205は、当該次のリンクを走行中のリンクとする。そして、仮想位置推定部205は、図8で説明したように、当該走行中のリンクにおいて、対象となる経路上のノードから目的地点までの、当該走行中のリンク上の距離を算出する(S107)。そして、仮想位置推定部205は、算出した距離、および、当該走行中のリンクの渋滞情報に基づいて、目的地点までの所要時間を算出する(S108)。
【0059】
次に、仮想位置推定部205は、車両の仮想位置が当該走行中のリンクに進入してからの時間の経過に応じて、車両の仮想位置を当該走行中のリンク上に算出する(S109)。そして、仮想位置推定部205は、走行中のリンクに進入してから、当該走行中のリンクの所要時間が経過したか否かを判定する(S110)。走行中のリンクに進入してから、当該走行中のリンクの所要時間が経過していない場合(S110:No)、仮想位置推定部205は、再びステップS109に示した処理を実行する。
【0060】
走行中のリンクに進入してから、当該走行中のリンクの所要時間が経過した場合(S110:Yes)、仮想位置推定部205は、仮想位置が目的地点に到着した旨を、当該仮想位置が通過した経路の経路IDと共に仮想位置表示部204に通知し(S111)、ナビゲーション装置20は、本フローチャートに示した仮想位置推定処理を終了する。
【0061】
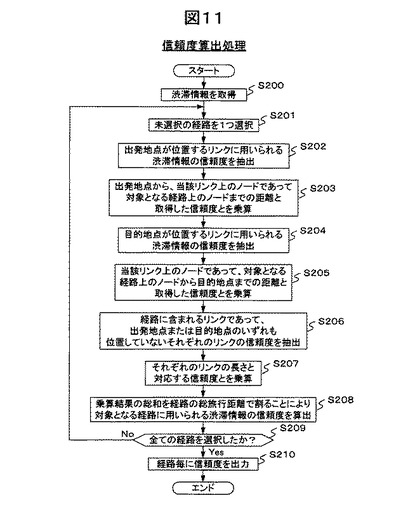
図11は、信頼度算出部202によって実行される信頼度算出処理の一例を示すフローチャートである。例えば、誘導経路を示す情報、および、誘導経路として指定されなかった経路を示す情報を経路探索部207から受け取った場合に、信頼度算出部202は、本フローチャートに示す信頼度算出処理を開始する。
【0062】
まず、信頼度算出部202は、それぞれの経路に少なくとも一部が含まれるリンクの渋滞情報を渋滞情報受信部201から取得する(S200)。そして、信頼度算出部202は、経路探索部207から通知された経路の中で、未選択の経路を1つ選択する(S201)。
【0063】
次に、信頼度算出部202は、選択中の経路に少なくとも一部が含まれるリンクの中で出発地点が位置しているリンクについて、当該リンクの渋滞情報に含まれる情報源IDに基づいて信頼度保持部203を参照し、当該リンクの信頼度を抽出する(S202)。そして、信頼度算出部202は、当該リンクにおいて、出発地点から、選択中の経路に含まれる当該リンクのノードまでの当該リンク上の距離を求め、求めた距離と、当該リンクの信頼度とを乗算する(S203)。
【0064】
次に、信頼度算出部202は、選択中の経路に少なくとも一部が含まれるリンクの中で目的地点が位置しているリンクについて、当該リンクの渋滞情報に含まれる情報源IDに基づいて信頼度保持部203を参照し、当該リンクの信頼度を抽出する(S204)。そして、信頼度算出部202は、当該リンクにおいて、対象となる経路に含まれる当該リンクのノードから目的地点までの当該リンク上の距離を求め、求めた距離と、当該リンクの信頼度とを乗算する(S205)。
【0065】
次に、信頼度算出部202は、選択中の経路に含まれるリンクの中で出発地点または目的地点のいずれも位置していないそれぞれのリンクについて、当該リンクの渋滞情報に含まれる情報源IDに基づいて信頼度保持部203を参照し、当該リンクの信頼度を抽出する(S206)。そして、信頼度算出部202は、それぞれのリンクについて長さと信頼度とを乗算する(S207)。
【0066】
次に、信頼度算出部202は、ステップS203、S205、およびS207において算出された乗算結果を合計し、合計値を、選択中の経路の旅行距離で割ることにより、選択中の経路上において仮想位置を算出する際に用いられる渋滞情報の信頼度を算出する(S208)。
【0067】
次に、信頼度算出部202は、経路探索部207から通知された経路を全て選択したか否かを判定する(S209)。未選択の経路が存在する場合(S209:No)、信頼度算出部202は、再びステップS201に示した処理を実行する。経路探索部207から通知された経路を全て選択した場合(S209:Yes)、信頼度算出部202は、経路毎に算出した渋滞情報の信頼度を仮想位置表示部204へ送り(S210)、信頼度算出部202は、本フローチャートに示した信頼度算出処理を終了する。
【0068】
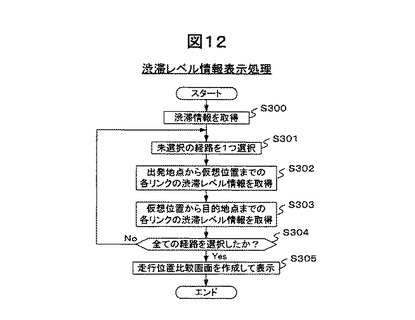
図12は、仮想位置表示部204によって実行される渋滞レベル情報表示処理の一例を示すフローチャートである。例えば、車両が目的地点に到着した旨を経路誘導部208から通知された場合、いずれかの経路の仮想位置が目的地点に到着した旨を仮想位置推定部205から通知された場合等に、仮想位置表示部204は、本フローチャートに示す渋滞レベル情報表示処理を開始する。
【0069】
まず、仮想位置表示部204は、それぞれの経路に少なくとも一部が含まれるリンクの渋滞情報を渋滞情報受信部201から取得する(S300)。そして、仮想位置表示部204は、経路探索部207から通知された経路の中で、未選択の経路を1つ選択する(S301)。
【0070】
次に、仮想位置表示部204は、選択中の経路において、出発地点から車両の現在位置または仮想位置までの間のそれぞれのリンクの渋滞レベル情報を渋滞レベル情報保持部200から取得し(S302)、仮想位置から目的地点までのそれぞれのリンクの渋滞レベル情報を渋滞情報受信部201から取得する(S303)。なお、仮想位置から目的地点までの間において渋滞情報が提供されていないリンクについては、仮想位置表示部204は、当該リンクの渋滞レベル情報をリンクデータ保持部209内の情報から算出する。
【0071】
次に、仮想位置表示部204は、経路探索部207から通知された経路を全て選択したか否かを判定する(S304)。未選択の経路が存在する場合(S304:No)、仮想位置表示部204は、再びステップS301に示した処理を実行する。経路探索部207から通知された経路を全て選択した場合(S304:Yes)、仮想位置表示部204は、図9において説明した走行位置比較画面40を作成して表示装置13に表示し(S305)、本フローチャートに示した渋滞レベル情報表示処理を終了する。
【0072】
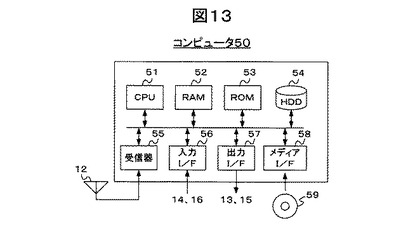
図13は、ナビゲーション装置20の機能を実現するコンピュータ50の一例を示すハードウェア構成図である。コンピュータ50は、CPU(Central Processing Unit)51、RAM(Random Access Memory)52、ROM(Read Only Memory)53、HDD(Hard Disk Drive)54、受信器55、入力インターフェイス(I/F)56、出力インターフェイス(I/F)57、およびメディアインターフェイス(I/F)58を備える。
【0073】
CPU51は、ROM53またはHDD54に格納されたプログラムに基づいて動作し、各部の制御を行う。ROM53は、コンピュータ50の起動時にCPU51によって実行されるブートプログラムや、コンピュータ50のハードウェアに依存するプログラム等を格納する。HDD54は、CPU51によって実行されるプログラムやデータ等を格納する。受信器55は、アンテナ12を介して受信した渋滞情報をCPU51に提供する。
【0074】
入力インターフェイス56は、入力装置14またはセンサ16からの信号を受信してCPU51へ送る。CPU51は、入力インターフェイス56を介して、入力装置14およびセンサ16を制御し、入力インターフェイス56を介して、入力装置14またはセンサ16から信号を取得する。出力インターフェイス57は、CPU51から取得したデータを、表示装置13またはスピーカ15へ出力する。CPU51は、出力インターフェイス57を介して、表示装置13およびスピーカ15を制御し、生成したデータを、出力インターフェイス57を介して表示装置13またはスピーカ15へ出力する。
【0075】
メディアインターフェイス58は、記録媒体59に格納されたプログラムまたはデータを読み取り、RAM52を介してCPU51に提供する。CPU51は、当該プログラムを、メディアインターフェイス58を介して記録媒体59からRAM52上にロードし、ロードしたプログラムを実行する。記録媒体59は、例えばDVD(Digital Versatile Disk)、PD(Phase change rewritable Disk)等の光学記録媒体、MO(Magneto-Optical disk)等の光磁気記録媒体、テープ媒体、磁気記録媒体、または半導体メモリ等である。
【0076】
コンピュータ50のCPU51は、RAM52上にロードされたプログラムを実行することにより、渋滞レベル情報保持部200、渋滞情報受信部201、信頼度算出部202、信頼度保持部203、仮想位置表示部204、仮想位置推定部205、現在位置算出部206、経路探索部207、経路誘導部208、およびリンクデータ保持部209の各機能を実現する。また、ROM53またはHDD54には、渋滞レベル情報保持部200、信頼度保持部203、またはリンクデータ保持部209内のデータが格納される。
【0077】
コンピュータ50は、これらのプログラムを、記録媒体59から読み取って実行するが、他の例として、コンピュータ50に通信機能を設け、コンピュータ50は、有線または無線の通信回線を介してこれらのプログラムを取得するようにしてもよい。
【0078】
以上、本発明の実施の形態について説明した。
【0079】
上記説明から明らかなように、本実施形態のナビゲーション装置20によれば、誘導経路として採用された経路が、誘導経路として採用されなかった他の経路と比較してより適切であったか否かをその都度あるいは目的地点に到着した後に検証するために必要な情報を提供することができる。
【0080】
なお、本発明は、上記した実施形態に限定されるものではなく、その要旨の範囲内で数々の変形が可能である。
【0081】
例えば、上記した実施形態において、ナビゲーション装置20は、設定された1つの目的地点に至る複数の経路について、車両の現在位置および仮想位置を、車両の実際の走行に応じて表示したが、他の形態として、異なる目的地点に至る複数の経路について、そのいずれかを誘導経路として、車両の現在位置および仮想位置を、車両の実際の走行に応じて表示するようにしてもよい。
【0082】
これにより、ナビゲーション装置20は、同一の目的が達成可能な目的地点(コンビニエンスストア、ショッピングセンタ、レストラン、病院等)が複数存在する場合に、そのいずれかを目的地点として走行を開始した後に、他の目的地点に向けて走行した場合の方がより早く目的地点に到達できたか否かを、その都度あるいは目的地点に到着した後に検証するために必要な情報を提供することができる。
【0083】
また、上記した実施形態において、ナビゲーション装置20は、車両が誘導経路を走行中に施設に立ち寄ったり、停車した場合であても、他の経路上においては車両が走行を続けているものとして仮想位置を算出するが、本発明はこれに限られない。他の形態として、ナビゲーション装置20は、例えば、車両の停車を検出した場合(ギアがパーキングに入ったことを検出した場合や、時速0kmが所定時間以上継続した場合等)に、他の経路上における仮想位置の進行を、車両が再び走行を開始するまで停止するようにしてもよい。これにより、より実際の車両の走行状況に沿ったシミュレーション結果を得ることができる。
【符号の説明】
【0084】
10・・・ナビゲーションシステム、11・・・渋滞情報配信局、12・・・アンテナ、13・・・表示装置、14・・・入力装置、15・・・スピーカ、16・・・センサ、20・・・ナビゲーション装置、200・・・渋滞レベル情報保持部、201・・・渋滞情報受信部、202・・・信頼度算出部、203・・・信頼度保持部、204・・・仮想位置表示部、205・・・仮想位置推定部、206・・・現在位置算出部、207・・・経路探索部、208・・・経路誘導部、209・・・リンクデータ保持部、30・・・出発地点、31・・・目的地点、32・・・仮想位置、40・・・走行位置比較画面、50・・・コンピュータ、51・・・CPU、52・・・RAM、53・・・ROM、54・・・HDD、55・・・受信器、56・・・入力インターフェイス、57・・・出力インターフェイス、58・・・メディアインターフェイス、59・・・記録媒体
【技術分野】
【0001】
本発明は、車両等の移動体に搭載され、誘導経路以外の経路の走行をシミュレートする技術に関する。
【背景技術】
【0002】
下記の特許文献1には、複数の経路を探索し、出発前に、その時点での各経路の渋滞情報に基づいて、複数の経路のそれぞれについて走行シミュレーションを行う技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−24387号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記特許文献1に開示されている技術では、ある時点での渋滞情報を、経路上の全てのリンクに対して適用している。しかし、実際には、その経路を走行している間にも、その先の渋滞状況は時々刻々と変化しており、必ずしも正しいシミュレーション結果が得られない場合がある。
【0005】
また、経路探索時の渋滞状況等に基づいて、探索された複数の経路の1つを誘導経路として決定し、当該誘導経路を走行して目的地点に到達した場合であっても、その後の渋滞状況の変化により、採用されなかった他の経路の方が目的地点に早く到達することができた可能性もある。そのため、実際に誘導経路上を走行している最中に、その時々のリアルタイムの渋滞情報を使用して、他の経路を走行したと仮定した場合の車両の仮想位置を算出して車両の現在位置と共に表示することができれば、誘導経路として採用された経路が最適であったか否かをその都度あるいは目的地点に到着した後に検証することができる。
【0006】
本発明は上記事情を鑑みてなされたものであり、本発明の目的は、誘導経路として採用された経路が、誘導経路として採用されなかった他の経路と比較してより適切であったか否かをその都度あるいは目的地点に到着した後に検証するために必要な情報を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、第1の発明は、目的地までの経路を探索する経路探索手段と、経路探索手段で探索された経路の交通情報を取得する交通情報取得手段と、交通情報取得手段で取得した交通情報を利用し、所定の開始時点から実際の時間経過に応じて経路上を移動する仮想位置を推定する仮想位置推定手段と、経路および仮想位置を表示する表示手段とを備えることを特徴とするナビゲーション装置を提供する。
【0008】
また、第2の発明は、移動体の現在位置を検出する位置検出手段と、目的地までの複数の経路を探索する経路探索手段と、探索手段で探索された複数の経路のうち、位置検出手段で検出された現在位置が移動する誘導経路を選別する選別手段と、探索手段で探索された複数の経路のうち、誘導経路以外の経路の交通情報を取得する交通情報取得手段と、交通情報取得手段で取得した交通情報を利用し、現在位置が誘導経路上の移動を開始した時点から実際の時間経過に応じて誘導経路以外の経路上を移動する仮想位置を推定する仮想位置推定手段と、経路、現在位置、および仮想位置を表示する表示手段とを備えることを特徴とするナビゲーション装置を提供する。
【0009】
また、第3の発明は、移動体の現在位置を検出する位置検出ステップと、目的地までの複数の経路を探索する経路探索ステップと、探索ステップで探索された複数の経路のうち、位置検出手段で検出された現在位置が存在する誘導経路を選別する選別ステップと、探索ステップで探索された複数の経路のうち、誘導経路以外の経路の交通情報を取得する交通情報取得ステップと、現在位置が誘導経路上の移動を開始した時点から実際の時間経過に応じて、交通情報取得ステップで取得した交通情報を利用し、誘導経路以外の経路上を移動する仮想位置を推定する仮想位置推定ステップと、経路、現在位置、および仮想位置を表示する表示ステップとを備えることを特徴とするナビゲーション方法を提供する。
【0010】
また、第4の発明は、コンピュータをナビゲーション装置として機能させるプログラムであって、移動体の現在位置を検出する位置検出部と、目的地までの複数の経路を探索する経路探索部と、探索部で探索された複数の経路のうち、位置検出手段で検出された現在位置が存在する誘導経路を選別する選別部と、探索部で探索された複数の経路のうち、誘導経路以外の経路の交通情報を取得する交通情報取得部と、現在位置が誘導経路上の移動を開始した時点から実際の時間経過に応じて、交通情報取得部で取得した交通情報を利用し、誘導経路以外の経路上を移動する仮想位置を推定する仮想位置推定部と、経路、現在位置、および仮想位置を表示させる表示制御部とを備えることを特徴とするプログラムを提供する。
【発明の効果】
【0011】
本発明のナビゲーション装置によれば、誘導経路として採用された経路が、誘導経路として採用されなかった他の経路と比較してより適切であったか否かをその都度あるいは事後的に検証するために必要な情報を提供することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施形態にかかるナビゲーションシステム10の構成の一例を示すシステム構成図である。
【図2】リンクデータ保持部209に格納されるデータの構造の一例を示す図である。
【図3】渋滞レベル情報保持部200に格納されるデータの構造の一例を示す図である。
【図4】信頼度保持部203に格納されるデータの構造の一例を示す図である。
【図5】経路探索部207によって探索された複数の経路の一例を示す概念図である。
【図6】仮想位置推定部205による仮想位置の算出過程の一例を説明するための概念図である。
【図7】仮想位置推定部205による仮想位置の算出過程の一例を説明するための概念図である。
【図8】仮想位置推定部205による仮想位置の算出過程の一例を説明するための概念図である。
【図9】走行位置比較画面40の一例を示す概念図である。
【図10】仮想位置算出処理の一例を示すフローチャートである。
【図11】信頼度算出処理の一例を示すフローチャートである。
【図12】渋滞レベル情報表示処理の一例を示すフローチャートである。
【図13】ナビゲーション装置20の機能を実現するコンピュータ50の一例を示すハードウェア構成図である。
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態について説明する。
【0014】
図1は、本発明の一実施形態にかかるナビゲーションシステム10の構成の一例を示すシステム構成図である。ナビゲーションシステム10は、アンテナ12、表示装置13、入力装置14、スピーカ15、センサ16、およびナビゲーション装置20を備える。ナビゲーション装置20は、渋滞レベル情報保持部200、渋滞情報受信部201、信頼度算出部202、信頼度保持部203、仮想位置表示部204、仮想位置推定部205、現在位置算出部206、経路探索部207、経路誘導部208、およびリンクデータ保持部209を有する。
【0015】
リンクデータ保持部209は、例えば図2に示すように、道路を示すリンクに関する情報を含むリンクテーブル2090が所定の地図領域を示すメッシュ毎に予め保持している。それぞれのリンクテーブル2090には、それぞれのメッシュを識別するメッシュID2091およびメッシュ内のリンクに関するデータであるリンクデータ2092等が含まれる。
【0016】
それぞれのリンクデータ2092には、それぞれのリンクを識別するリンクID2093、当該リンクの開始ノード座標2094、当該リンクの終了ノード座標2095、当該リンクの道路種別2096、当該リンクのリンク長2097、当該リンクの開始ノードに接続されている他のリンクの識別情報である開始接続リンク2098、当該リンクの終了ノードに接続されている他のリンクの識別情報である終了接続リンク2099、当該リンクの旅行時間2100、および当該リンクの法定速度2101等が格納されている。なお、リンクデータ保持部209は、リンクデータの他に、地図データも予め保持している。
【0017】
渋滞レベル情報保持部200は、例えば図3に示すように、リンクID2000毎に、当該リンクID2000に対応するリンクの少なくとも一部が含まれる経路を識別する経路ID2001、および、当該リンク上に後述する車両の仮想位置を算出する際に用いられた渋滞情報に含まれていた渋滞レベル情報2002を保持する。渋滞レベル情報としては、例えば、渋滞の程度に応じて、「渋滞」、「混雑」、および「渋滞なし」の3段階がある。
【0018】
信頼度保持部203は、例えば図4に示すように、渋滞情報の情報源を識別する情報源ID2030毎に、当該情報源の名称2031、および、当該情報源の信頼度2032を予め保持している。本実施形態において、渋滞情報の情報源としては、例えば、プローブカーからの情報を基に渋滞情報配信局11側でリアルタイムに算出された交通情報(リアルタイム交通情報)、プローブカーからの情報以外の情報(道路に設置されたセンサからの情報等)を基に渋滞情報配信局11側で算出された交通情報(統計交通情報)、センサ等が設置されていない道路について他の道路の交通情報から渋滞情報配信局11側で算出された交通情報(統計交通情報補完)、および、ある時点までの交通量の変化の実測値や予測値に基づいて算出され、リンク毎にリンクデータ保持部209に格納されている交通情報(静的交通情報)の4種類を想定している。
【0019】
本実施形態では、「リアルタイム交通情報」の信頼度が最も高く、「統計交通情報」、「統計交通情報補完」、「静的交通情報」の順に信頼度が低くなっている。最も信頼度の高い「リアルタイム交通情報」を常に用いることができれば高い精度での経路予測が可能であるが、少なくとも1台のプローブカーが対象となるリンクを走行している必要がある等、必要な条件が多いため、どのリンクについても常に「リアルタイム交通情報」を用いることができるとは限らない。また、「統計交通情報」についても、全ての道路にセンサが設置されているとは限らないため、どのリンクについても常に「統計交通情報」を用いることができるとは限らない。そのため、ナビゲーション装置20は、対象となるリンクについて用いることができる交通情報の中で、最も信頼度の高い交通情報を用いることとしている。
【0020】
センサ16は、例えばGPS(Global Positioning System)受信機や方位センサ、距離センサ、車速センサ等であり、測地衛星から送信されたGPS信号や、車両の進行方位、車両の移動距離、車速等を測定し、測定情報を現在位置算出部206に供給する。
【0021】
現在位置算出部206は、センサ16から供給された測定情報およびリンクデータ保持部209に格納されたリンクデータに基づいて、ナビゲーション装置20が搭載された車両が所定距離(例えば10m)移動する毎に、例えばマップマッチング等により当該車両の現在位置を算出し、算出した車両の現在位置を示す情報を仮想位置表示部204、経路探索部207、および経路誘導部208に提供する。
【0022】
経路探索部207は、出発地点、目的地点、および経由地点の座標や、探索条件等を含む探索情報を、タッチパネル等の入力装置14を介してユーザから受け付けた場合に、リンクデータ保持部209内のリンクデータを参照し、当該探索情報に基づいて、例えばダイクストラ法等のアルゴリズムを用いて、経由地点を通り出発地点から目的地点へ至る経路を探索し、探索結果を表示装置13に表示する。
【0023】
本実施形態では、例えば図5に示すように、出発地点30から目的地点31までの経路が経路探索部207によって3本探索されたものと仮定する。リンクL1の一部、リンクL2、リンクL3、およびリンクL4の一部を通る経路を経路R0とし、リンクL1の一部、リンクL5、リンクL6、リンクL7、およびリンクL4の一部を通る経路を経路R1とし、リンクL1の一部、リンクL8、リンクL9、リンクL10、およびリンクL4の一部を通る経路を経路R2とする。
【0024】
経路探索部207は、探索した経路の中で、入力装置14を介してユーザから指定された経路を誘導経路として、当該誘導経路を経路誘導部208へ送る。また、経路探索部207は、当該誘導経路と共に、誘導経路として採用されなかった他の経路をそれぞれの経路の経路IDに対応付けて信頼度算出部202、仮想位置表示部204、および仮想位置推定部205へ送る。本実施形態においては、例えば図5に示すように、経路R0が誘導経路として指定されたものと仮定する。なお、経路探索部207は、車両の現在位置を出発地点として経路探索を実行してもよい。
【0025】
経路誘導部208は、経路探索部207から誘導経路を示す情報を受け取った後に、車両の出発を検出した場合に、リンクデータ保持部209に格納されている、車両の現在位置付近の地図データを取得し、取得した地図データで示される地図上に車両の現在位置を示すカーマークを表示することにより、経路誘導を開始すると共に、経路誘導の開始を仮想位置推定部205に通知する。経路誘導部208は、例えば、経路探索部207から誘導経路を示す情報を受け取った後に、車両の現在位置が所定距離以上移動した場合に、車両が出発したと判定する。
【0026】
また、経路誘導部208は、車両が目的地点に到着した場合に、その旨を仮想位置表示部204に通知する。例えば、目的地点から所定距離(例えば100m)以内の範囲に車両の現在位置が進入した場合に、経路誘導部208は、車両が目的地点に到着したと判定する。
【0027】
また、経路誘導部208は、現在位置算出部206によって算出された車両の現在位置およびリンクデータ保持部209に格納されているリンクデータを参照して、誘導経路上において、車両の前方所定距離以内に、進行方向を指示すべき案内地点が存在する場合に、当該案内地点に関する画像を表示装置13に表示すると共に、誘導を示す音声をスピーカ15を介して再生することにより、進むべき方向を案内する。
【0028】
渋滞情報受信部201は、FM多重放送や電波ビーコン等を介して渋滞情報配信局11から配信される渋滞情報をアンテナ12を介して随時受信し、受信した最新の渋滞情報を保持する。そして、渋滞情報受信部201は、信頼度算出部202、仮想位置表示部204、または仮想位置推定部205から要求があった場合に、保持している最新の渋滞情報を提供する。渋滞情報には、リンクID毎に、当該リンクIDに対応するリンクの所要時間を示す情報、当該リンクにおける渋滞の程度を示す情報、および当該リンクにおける渋滞情報の情報源を示す情報源ID等が含まれている。
【0029】
仮想位置推定部205は、経路誘導部208から誘導経路の開始を通知された場合に、誘導経路R0以外のその他の経路R1およびR2のそれぞれについて、以下の処理を実行する。なお、仮想位置推定部205は、「9:00」に経路誘導部208から誘導経路の開始を通知された、すなわち、車両が実際に出発したものと仮定する。また、以下では、経路R1についての処理を例に説明する。他の経路R2においても同様の処理が行われる。
【0030】
まず、仮想位置推定部205は、出発地点が位置するリンクL1の渋滞情報を渋滞情報受信部201から取得し、取得した渋滞情報に含まれている渋滞レベル情報を、当該リンクL1のリンクIDおよび対象となる経路R1の経路IDに対応付けて渋滞レベル情報保持部200に登録する。
【0031】
なお、前述の「リアルタイム交通情報」、「統計交通情報」、または「統計交通情報補完」のいずれも提供されていないリンクについては、仮想位置推定部205は、例えば、当該リンクの法定速度および旅行時間をリンクデータ保持部209から抽出して、当該リンクの平均速度が法定速度の30%未満である場合には「渋滞」を、30%以上60%未満である場合には「混雑」を、60%以上である場合には「渋滞なし」を、それぞれ渋滞レベル情報として渋滞レベル情報保持部200に登録する。
【0032】
次に、仮想位置推定部205は、車両が出発してからの時間の経過に応じて、出発地点が位置するリンクL1上に、車両が経路R1を走行したと仮定した場合(実際には車両は誘導経路R0上を走行している)の車両の仮想位置32をL1上に算出する。具体的には、仮想位置推定部205は、例えば図6(a)に示すように、出発地点30から、当該出発地点30が位置するリンクL1のノードであって、対象となる経路R1上のノード(図6の例ではノードN1)までの距離L1’を算出する。図6の例では、L1’は180mである。
【0033】
そして、仮想位置推定部205は、出発地点30が位置するリンクL1の渋滞情報に含まれている(ノードN7からノードN1への)所要時間、および、リンクデータ保持部209に格納されているリンクL1のリンク長を参照して、L1’の所要時間を算出する。例えば、リンクL1の渋滞情報に含まれている所要時間が5分であり、リンクL1のリンク長が300mの場合、仮想位置推定部205は、L1’の所要時間を3分と算出する。なお、前述の「リアルタイム交通情報」、「統計交通情報」、または「統計交通情報補完」のいずれも提供されていないリンクについては、仮想位置推定部205は、リンクデータ保持部209内の旅行時間を当該リンクの所要時間として用いる。
【0034】
次に、仮想位置推定部205は、車両が出発してからの時間の経過に応じて、車両の仮想位置32をL1’上に算出する。出発してから2分が経過した「9:02」において、仮想位置推定部205は、例えば図6(b)に示すように、L1’上において出発地点から120mの位置に車両の仮想位置32を算出する。仮想位置推定部205は、各経路について算出した仮想位置の情報を仮想位置表示部204へ送る。
【0035】
次に、仮想位置推定部205は、出発してから、L1’について算出した所要時間(3分)が経過した場合に(図7(a)参照)、対象となる経路R1上における次のリンクL5の渋滞情報を渋滞情報受信部201から取得する。そして、仮想位置推定部205は、取得した渋滞情報に含まれている渋滞レベル情報を、当該リンクL5のリンクIDおよび経路R1の経路IDに対応付けて渋滞レベル情報保持部200に登録する。
【0036】
そして、仮想位置推定部205は、リンクL5の渋滞情報に含まれている(ノードN1からノードN5への)所要時間、および、リンクデータ保持部209に格納されているリンクL5のリンク長を参照して、車両の仮想位置32がリンクL5に進入してからの時間の経過に応じて、車両の仮想位置32をリンクL5上に算出する。例えば、仮想位置32がリンクL5に進入してから5分が経過した「9:08」において、仮想位置推定部205は、図7(b)に示すように、リンクL5上においてノードN1から1kmの位置に車両の仮想位置32を算出する。この処理は、次のリンクが、目的地点が位置するリンクとなるまで繰り返される。
【0037】
次のリンクに目的地点が位置する場合、仮想位置推定部205は、当該リンクにおいて、対象となる経路R1上のノードから目的地点までの距離を算出し、算出した距離、および、当該リンクの渋滞情報に基づいて、車両の仮想位置が当該リンクに進入してからの時間の経過に応じて、車両の仮想位置を当該リンク上に算出する。
【0038】
具体的には、仮想位置推定部205は、例えば図8(a)に示すように、目的地点31が位置するリンクL4について、ノードN3から目的地点31までの距離L4’を算出する。図8の例では、L4’は800mである。そして、仮想位置推定部205は、リンクL4の渋滞情報に含まれている(ノードN3からノードN4への)所要時間、および、リンクデータ保持部209に格納されているリンクL4のリンク長を参照して、L4’の所要時間を算出する。例えば、リンクL4の渋滞情報に含まれている所要時間が8分であり、リンクL4のリンク長が1.6kmの場合、仮想位置推定部205は、L4’の所要時間を4分と算出する。
【0039】
そして、仮想位置推定部205は、車両の仮想位置32がリンクL4に進入してからの時間の経過に応じて、車両の仮想位置32をL4’上に算出する。車両の仮想位置32がリンクL4に進入してから4分が経過した「9:47」において、仮想位置推定部205は、例えば図8(b)に示すように、目的地点31の位置に仮想位置32を算出する。いずれかの経路上の仮想位置32が目的地点31に到着した場合、仮想位置推定部205は、その旨を仮想位置表示部204に通知する。
【0040】
なお、仮想位置推定部205は、車両が走行中の誘導経路R0についても、車両が進入したリンクの渋滞情報を渋滞情報受信部201から取得し、取得した渋滞情報に含まれている渋滞レベル情報(渋滞情報が提供されていないリンクについてはリンクデータ保持部209の情報を用いて算出した渋滞レベル情報)を、それぞれのリンクのリンクIDに対応付けて渋滞レベル情報保持部200に登録する。
【0041】
信頼度算出部202は、誘導経路を示す情報、および、誘導経路として指定されなかった経路を示す情報を経路探索部207から受け取った場合に、それぞれの経路に少なくとも一部が含まれるリンクの渋滞情報を渋滞情報受信部201から取得する。このとき、信頼度算出部202は、それぞれのリンクについて、最も信頼度の高い情報源の渋滞情報を取得する。なお、渋滞情報が提供されないリンクについては、最も信頼度の低い「静的交通情報」が用いられる。
【0042】
そして、信頼度算出部202は、それぞれのリンクに用いられる渋滞情報の情報源IDに基づいて信頼度保持部203を参照し、それぞれのリンク上に仮想位置を算出する際に用いられる渋滞情報の信頼度を取得する。そして、信頼度保持部203は、それぞれの経路について、以下の処理を実行する。
【0043】
まず、信頼度算出部202は、出発地点が位置しているリンクの渋滞情報に含まれる情報源IDに基づいて信頼度保持部203を参照し、当該リンクの信頼度を抽出する。そして、信頼度算出部202は、出発地点が位置しているリンクにおいて、出発地点から、対象となる経路に含まれる当該リンクのノードまでの当該リンク上の距離を求め、求めた距離と、当該リンクの信頼度とを乗算する。
【0044】
次に、信頼度算出部202は、目的地点が位置しているリンクの渋滞情報に含まれる情報源IDに基づいて信頼度保持部203を参照し、当該リンクの信頼度を抽出する。そして、信頼度算出部202は、目的地点が位置しているリンクにおいて、対象となる経路に含まれる当該リンクのノードから目的地点までの当該リンク上の距離を求め、求めた距離と、当該リンクの信頼度とを乗算する。
【0045】
次に、信頼度算出部202は、出発地点または目的地点のいずれも位置していないリンクであって、対象となる経路に含まれるそれぞれのリンクについて、渋滞情報に含まれる情報源IDに基づいて信頼度保持部203を参照し、当該リンクの信頼度を抽出する。そして、信頼度算出部202は、それぞれのリンクについて長さと信頼度とを乗算する。
【0046】
次に、信頼度算出部202は、各リンクの乗算結果を合計し、合計値を、出発地点から目的地点までの旅行距離で割ることにより、対象となる経路上において仮想位置を算出する際に用いられる渋滞情報の信頼度を算出する。信頼度算出部202は、経路毎に算出した渋滞情報の信頼度を仮想位置表示部204へ送る。
【0047】
なお、それぞれのリンクにおいて用いることができる渋滞情報の情報源が短い期間に変更されることは少ないため、信頼度算出部202は、経路探索部207から誘導経路として指定されなかった経路を示す情報を受け取った後、仮想位置表示部204によって当該信頼度が表示装置13に表示される前であれば、当該経路毎の渋滞情報の信頼度をいつ算出してもよい。
【0048】
仮想位置表示部204は、車両が目的地点に到着した旨を経路誘導部208から通知された場合、いずれかの経路の仮想位置が目的地点に到着した旨を仮想位置推定部205から通知された場合等に、それぞれの経路について、出発地点から仮想位置点までのそれぞれのリンクの渋滞レベル情報を渋滞レベル情報保持部200から取得すると共に、仮想位置から目的地点までのそれぞれのリンクの渋滞レベル情報を渋滞情報受信部201から取得、あるいは、リンクデータ保持部209内の情報から算出する。
【0049】
そして、仮想位置表示部204は、車両の現在位置、各仮想位置、誘導経路、および誘導経路として指定されなかった経路を、例えば図9に示すような走行位置比較画面40として表示装置13に表示する。このとき、仮想位置表示部204は、出発地点から仮想位置点までのそれぞれのリンクの渋滞レベル情報を、仮想位置から目的地点までのそれぞれのリンクの渋滞レベル情報とは異なる形態で表示する。異なる形態とは、例えば、異なる色の矢印を用いる、異なる線種(実線と点線等)の矢印を用いる、太さの異なる矢印を用いる、異なるハッチングパターンの矢印を用いる、一方の矢印を点灯させて他方を点滅させる等が考えられる。
【0050】
図9の走行位置比較画面40において、領域41には、出発地点、目的地点、各経路、車両の現在位置、および各仮想位置が、渋滞レベル情報と共に表示される。領域42や領域43には、信頼度算出部202によって算出された、各経路における渋滞情報の信頼度が表示される。図9の走行位置比較画面40では、出発地点から仮想位置点までの渋滞レベル情報を白抜きの矢印で表し、仮想位置から目的地点までの渋滞レベル情報を塗りつぶしの矢印で表示しており、いずれも太さで渋滞の程度を表している。
【0051】
図10は、仮想位置推定部205によって実行される仮想位置推定処理の一例を示すフローチャートである。車両が出発した旨を経路誘導部208から通知された場合に、仮想位置推定部205は、誘導経路以外のそれぞれの経路について本フローチャートに示す仮想位置推定処理を開始する。
【0052】
まず、仮想位置推定部205は、出発地点が位置するリンクの渋滞情報を渋滞情報受信部201から取得し、取得した渋滞情報に含まれている渋滞レベル情報を、当該リンクのリンクIDおよび対象となる経路の経路IDに対応付けて渋滞レベル情報保持部200に登録する(S100)。
【0053】
次に、仮想位置推定部205は、図6(a)で説明したように、出発地点30から、当該出発地点30が位置するリンクL1のノードであって、対象となる経路上のノードN1までの距離L1’を算出する(S101)。そして、仮想位置推定部205は、出発地点30が位置するリンクL1の渋滞情報に含まれているリンクL1の所要時間、および、リンクデータ保持部209に格納されているリンクL1のリンク長を参照して、L1’の所要時間を算出する(S102)。
【0054】
次に、仮想位置推定部205は、車両が出発してからの時間の経過に応じて、車両の仮想位置32をL1’上に算出する(S103)。そして、仮想位置推定部205は、出発してから、L1’について算出した所要時間が経過したか否かを判定する(S104)。出発してから、L1’について算出した所要時間が経過していない場合(S104:No)、仮想位置推定部205は、再びステップS103に示した処理を実行する。
【0055】
図7(a)で説明したように、出発してから、L1’について算出した所要時間が経過した場合(S104:Yes)、仮想位置推定部205は、対象となる経路上における次のリンクの渋滞情報を渋滞情報受信部201から取得し、取得した渋滞情報に含まれている渋滞レベル情報を、当該次のリンクのリンクIDおよび対象となる経路の経路IDに対応付けて渋滞レベル情報保持部200に登録する(S105)。
【0056】
次に、仮想位置推定部205は、当該次のリンクに目的地点が位置しているか否かを判定する(S106)。当該次のリンクに目的地点が位置していない場合(S106:No)、仮想位置推定部205は、当該次のリンクを走行中のリンクとする。そして、仮想位置推定部205は、当該走行中のリンクの渋滞情報に含まれている所要時間、および、リンクデータ保持部209に格納されている当該走行中のリンクのリンク長に基づいて、車両の仮想位置が当該走行中のリンクに進入してからの時間の経過に応じて、車両の仮想位置を当該走行中のリンク上に算出する(S112)。
【0057】
次に、仮想位置推定部205は、走行中のリンクに進入してから、当該走行中のリンクの所要時間が経過したか否かを判定する(S113)。走行中のリンクに進入してから、当該走行中のリンクの所要時間が経過していない場合(S113:No)、仮想位置推定部205は、再びステップS112に示した処理を実行する。走行中のリンクに進入してから、当該走行中のリンクの所要時間が経過した場合(S113:Yes)、仮想位置推定部205は、再びステップS105に示した処理を実行する。
【0058】
ステップS106において、次のリンクに目的地点が位置している場合(S106:Yes)、仮想位置推定部205は、当該次のリンクを走行中のリンクとする。そして、仮想位置推定部205は、図8で説明したように、当該走行中のリンクにおいて、対象となる経路上のノードから目的地点までの、当該走行中のリンク上の距離を算出する(S107)。そして、仮想位置推定部205は、算出した距離、および、当該走行中のリンクの渋滞情報に基づいて、目的地点までの所要時間を算出する(S108)。
【0059】
次に、仮想位置推定部205は、車両の仮想位置が当該走行中のリンクに進入してからの時間の経過に応じて、車両の仮想位置を当該走行中のリンク上に算出する(S109)。そして、仮想位置推定部205は、走行中のリンクに進入してから、当該走行中のリンクの所要時間が経過したか否かを判定する(S110)。走行中のリンクに進入してから、当該走行中のリンクの所要時間が経過していない場合(S110:No)、仮想位置推定部205は、再びステップS109に示した処理を実行する。
【0060】
走行中のリンクに進入してから、当該走行中のリンクの所要時間が経過した場合(S110:Yes)、仮想位置推定部205は、仮想位置が目的地点に到着した旨を、当該仮想位置が通過した経路の経路IDと共に仮想位置表示部204に通知し(S111)、ナビゲーション装置20は、本フローチャートに示した仮想位置推定処理を終了する。
【0061】
図11は、信頼度算出部202によって実行される信頼度算出処理の一例を示すフローチャートである。例えば、誘導経路を示す情報、および、誘導経路として指定されなかった経路を示す情報を経路探索部207から受け取った場合に、信頼度算出部202は、本フローチャートに示す信頼度算出処理を開始する。
【0062】
まず、信頼度算出部202は、それぞれの経路に少なくとも一部が含まれるリンクの渋滞情報を渋滞情報受信部201から取得する(S200)。そして、信頼度算出部202は、経路探索部207から通知された経路の中で、未選択の経路を1つ選択する(S201)。
【0063】
次に、信頼度算出部202は、選択中の経路に少なくとも一部が含まれるリンクの中で出発地点が位置しているリンクについて、当該リンクの渋滞情報に含まれる情報源IDに基づいて信頼度保持部203を参照し、当該リンクの信頼度を抽出する(S202)。そして、信頼度算出部202は、当該リンクにおいて、出発地点から、選択中の経路に含まれる当該リンクのノードまでの当該リンク上の距離を求め、求めた距離と、当該リンクの信頼度とを乗算する(S203)。
【0064】
次に、信頼度算出部202は、選択中の経路に少なくとも一部が含まれるリンクの中で目的地点が位置しているリンクについて、当該リンクの渋滞情報に含まれる情報源IDに基づいて信頼度保持部203を参照し、当該リンクの信頼度を抽出する(S204)。そして、信頼度算出部202は、当該リンクにおいて、対象となる経路に含まれる当該リンクのノードから目的地点までの当該リンク上の距離を求め、求めた距離と、当該リンクの信頼度とを乗算する(S205)。
【0065】
次に、信頼度算出部202は、選択中の経路に含まれるリンクの中で出発地点または目的地点のいずれも位置していないそれぞれのリンクについて、当該リンクの渋滞情報に含まれる情報源IDに基づいて信頼度保持部203を参照し、当該リンクの信頼度を抽出する(S206)。そして、信頼度算出部202は、それぞれのリンクについて長さと信頼度とを乗算する(S207)。
【0066】
次に、信頼度算出部202は、ステップS203、S205、およびS207において算出された乗算結果を合計し、合計値を、選択中の経路の旅行距離で割ることにより、選択中の経路上において仮想位置を算出する際に用いられる渋滞情報の信頼度を算出する(S208)。
【0067】
次に、信頼度算出部202は、経路探索部207から通知された経路を全て選択したか否かを判定する(S209)。未選択の経路が存在する場合(S209:No)、信頼度算出部202は、再びステップS201に示した処理を実行する。経路探索部207から通知された経路を全て選択した場合(S209:Yes)、信頼度算出部202は、経路毎に算出した渋滞情報の信頼度を仮想位置表示部204へ送り(S210)、信頼度算出部202は、本フローチャートに示した信頼度算出処理を終了する。
【0068】
図12は、仮想位置表示部204によって実行される渋滞レベル情報表示処理の一例を示すフローチャートである。例えば、車両が目的地点に到着した旨を経路誘導部208から通知された場合、いずれかの経路の仮想位置が目的地点に到着した旨を仮想位置推定部205から通知された場合等に、仮想位置表示部204は、本フローチャートに示す渋滞レベル情報表示処理を開始する。
【0069】
まず、仮想位置表示部204は、それぞれの経路に少なくとも一部が含まれるリンクの渋滞情報を渋滞情報受信部201から取得する(S300)。そして、仮想位置表示部204は、経路探索部207から通知された経路の中で、未選択の経路を1つ選択する(S301)。
【0070】
次に、仮想位置表示部204は、選択中の経路において、出発地点から車両の現在位置または仮想位置までの間のそれぞれのリンクの渋滞レベル情報を渋滞レベル情報保持部200から取得し(S302)、仮想位置から目的地点までのそれぞれのリンクの渋滞レベル情報を渋滞情報受信部201から取得する(S303)。なお、仮想位置から目的地点までの間において渋滞情報が提供されていないリンクについては、仮想位置表示部204は、当該リンクの渋滞レベル情報をリンクデータ保持部209内の情報から算出する。
【0071】
次に、仮想位置表示部204は、経路探索部207から通知された経路を全て選択したか否かを判定する(S304)。未選択の経路が存在する場合(S304:No)、仮想位置表示部204は、再びステップS301に示した処理を実行する。経路探索部207から通知された経路を全て選択した場合(S304:Yes)、仮想位置表示部204は、図9において説明した走行位置比較画面40を作成して表示装置13に表示し(S305)、本フローチャートに示した渋滞レベル情報表示処理を終了する。
【0072】
図13は、ナビゲーション装置20の機能を実現するコンピュータ50の一例を示すハードウェア構成図である。コンピュータ50は、CPU(Central Processing Unit)51、RAM(Random Access Memory)52、ROM(Read Only Memory)53、HDD(Hard Disk Drive)54、受信器55、入力インターフェイス(I/F)56、出力インターフェイス(I/F)57、およびメディアインターフェイス(I/F)58を備える。
【0073】
CPU51は、ROM53またはHDD54に格納されたプログラムに基づいて動作し、各部の制御を行う。ROM53は、コンピュータ50の起動時にCPU51によって実行されるブートプログラムや、コンピュータ50のハードウェアに依存するプログラム等を格納する。HDD54は、CPU51によって実行されるプログラムやデータ等を格納する。受信器55は、アンテナ12を介して受信した渋滞情報をCPU51に提供する。
【0074】
入力インターフェイス56は、入力装置14またはセンサ16からの信号を受信してCPU51へ送る。CPU51は、入力インターフェイス56を介して、入力装置14およびセンサ16を制御し、入力インターフェイス56を介して、入力装置14またはセンサ16から信号を取得する。出力インターフェイス57は、CPU51から取得したデータを、表示装置13またはスピーカ15へ出力する。CPU51は、出力インターフェイス57を介して、表示装置13およびスピーカ15を制御し、生成したデータを、出力インターフェイス57を介して表示装置13またはスピーカ15へ出力する。
【0075】
メディアインターフェイス58は、記録媒体59に格納されたプログラムまたはデータを読み取り、RAM52を介してCPU51に提供する。CPU51は、当該プログラムを、メディアインターフェイス58を介して記録媒体59からRAM52上にロードし、ロードしたプログラムを実行する。記録媒体59は、例えばDVD(Digital Versatile Disk)、PD(Phase change rewritable Disk)等の光学記録媒体、MO(Magneto-Optical disk)等の光磁気記録媒体、テープ媒体、磁気記録媒体、または半導体メモリ等である。
【0076】
コンピュータ50のCPU51は、RAM52上にロードされたプログラムを実行することにより、渋滞レベル情報保持部200、渋滞情報受信部201、信頼度算出部202、信頼度保持部203、仮想位置表示部204、仮想位置推定部205、現在位置算出部206、経路探索部207、経路誘導部208、およびリンクデータ保持部209の各機能を実現する。また、ROM53またはHDD54には、渋滞レベル情報保持部200、信頼度保持部203、またはリンクデータ保持部209内のデータが格納される。
【0077】
コンピュータ50は、これらのプログラムを、記録媒体59から読み取って実行するが、他の例として、コンピュータ50に通信機能を設け、コンピュータ50は、有線または無線の通信回線を介してこれらのプログラムを取得するようにしてもよい。
【0078】
以上、本発明の実施の形態について説明した。
【0079】
上記説明から明らかなように、本実施形態のナビゲーション装置20によれば、誘導経路として採用された経路が、誘導経路として採用されなかった他の経路と比較してより適切であったか否かをその都度あるいは目的地点に到着した後に検証するために必要な情報を提供することができる。
【0080】
なお、本発明は、上記した実施形態に限定されるものではなく、その要旨の範囲内で数々の変形が可能である。
【0081】
例えば、上記した実施形態において、ナビゲーション装置20は、設定された1つの目的地点に至る複数の経路について、車両の現在位置および仮想位置を、車両の実際の走行に応じて表示したが、他の形態として、異なる目的地点に至る複数の経路について、そのいずれかを誘導経路として、車両の現在位置および仮想位置を、車両の実際の走行に応じて表示するようにしてもよい。
【0082】
これにより、ナビゲーション装置20は、同一の目的が達成可能な目的地点(コンビニエンスストア、ショッピングセンタ、レストラン、病院等)が複数存在する場合に、そのいずれかを目的地点として走行を開始した後に、他の目的地点に向けて走行した場合の方がより早く目的地点に到達できたか否かを、その都度あるいは目的地点に到着した後に検証するために必要な情報を提供することができる。
【0083】
また、上記した実施形態において、ナビゲーション装置20は、車両が誘導経路を走行中に施設に立ち寄ったり、停車した場合であても、他の経路上においては車両が走行を続けているものとして仮想位置を算出するが、本発明はこれに限られない。他の形態として、ナビゲーション装置20は、例えば、車両の停車を検出した場合(ギアがパーキングに入ったことを検出した場合や、時速0kmが所定時間以上継続した場合等)に、他の経路上における仮想位置の進行を、車両が再び走行を開始するまで停止するようにしてもよい。これにより、より実際の車両の走行状況に沿ったシミュレーション結果を得ることができる。
【符号の説明】
【0084】
10・・・ナビゲーションシステム、11・・・渋滞情報配信局、12・・・アンテナ、13・・・表示装置、14・・・入力装置、15・・・スピーカ、16・・・センサ、20・・・ナビゲーション装置、200・・・渋滞レベル情報保持部、201・・・渋滞情報受信部、202・・・信頼度算出部、203・・・信頼度保持部、204・・・仮想位置表示部、205・・・仮想位置推定部、206・・・現在位置算出部、207・・・経路探索部、208・・・経路誘導部、209・・・リンクデータ保持部、30・・・出発地点、31・・・目的地点、32・・・仮想位置、40・・・走行位置比較画面、50・・・コンピュータ、51・・・CPU、52・・・RAM、53・・・ROM、54・・・HDD、55・・・受信器、56・・・入力インターフェイス、57・・・出力インターフェイス、58・・・メディアインターフェイス、59・・・記録媒体
【特許請求の範囲】
【請求項1】
目的地までの経路を探索する経路探索手段と、
前記経路探索手段で探索された前記経路の交通情報を取得する交通情報取得手段と、
前記交通情報取得手段で取得した前記交通情報を利用し、所定の開始時点から実際の時間経過に応じて前記経路上を移動する仮想位置を推定する仮想位置推定手段と、
前記経路および前記仮想位置を表示する表示手段と、
を、備えることを特徴とするナビゲーション装置。
【請求項2】
移動体の現在位置を検出する位置検出手段と、
目的地までの複数の経路を探索する経路探索手段と、
前記探索手段で探索された前記複数の経路のうち、前記位置検出手段で検出された前記現在位置が移動する誘導経路を選別する選別手段と、
前記探索手段で探索された前記複数の経路のうち、前記誘導経路以外の経路の交通情報を取得する交通情報取得手段と、
前記交通情報取得手段で取得した前記交通情報を利用し、前記現在位置が前記誘導経路上の移動を開始した時点から実際の時間経過に応じて前記誘導経路以外の経路上を移動する仮想位置を推定する仮想位置推定手段と、
前記経路、前記現在位置、および前記仮想位置を表示する表示手段と、
を、備えることを特徴とするナビゲーション装置。
【請求項3】
請求項1または2に記載されたナビゲーション装置において、
前記交通情報取得手段は、前記交通情報として渋滞情報を取得する
ことを特徴とするナビゲーション装置。
【請求項4】
請求項1または2に記載されたナビゲーション装置において、
前記交通情報取得手段は、前記交通情報として渋滞の程度を示す渋滞レベル情報を含む渋滞情報を取得する
ことを特徴とするナビゲーション装置。
【請求項5】
請求項1または2に記載されたナビゲーション装置において、
前記交通情報取得手段は、前記交通情報の情報源ごとに前記交通情報の信頼度を算出する信頼度算出手段、
を備えることを特徴とするナビゲーション装置。
【請求項6】
請求項1または2に記載されたナビゲーション装置において、
前記仮想位置の目的地への到達予想時間を算定する予想手段
を備え、
前記表示手段は前記予想手段によって算定された前記仮想位置の到達予想時間を表示する
ことを特徴とするナビゲーション装置。
【請求項7】
請求項2に記載されたナビゲーション装置において、
前記現在位置が前記目的地に到達したことを検出する現在位置到達検出手段、
を備え、
前記表示手段は、前記現在位置到達検出手段により現在位置が目的地に到達したことが検出されたとき、前記仮想位置を表示する
ことを特徴とするナビゲーション装置。
【請求項8】
請求項2に記載されたナビゲーション装置において、
前記仮想位置が前記目的地に到達したことを検出する仮想位置到達検出手段、
を備え、
前記表示手段は、前記仮想位置到達検出手段により仮想位置が目的地に到達したことが検出されたとき、前記現在位置または他の仮想位置を表示する
ことを特徴とするナビゲーション装置。
【請求項9】
請求項2に記載されたナビゲーション装置において、
前記交通情報取得手段は、
前記交通情報を保持する保持手段と、
前記保持手段によって保持された前記交通情報の内容と、新しく取得した交通情報の内容とを比較する比較手段と、
前記比較手段により、前記保持された交通情報の内容と前記新しく取得した交通情報の内容との間に変更の有無を判断する変更判断手段と、
を備え、
前記表示手段は、
前記変更判断手段によって、交通情報の内容に変更があった場合、前記仮想位置を表示する
ことを特徴とするナビゲーション装置。
【請求項10】
移動体の現在位置を検出する位置検出ステップと、
目的地までの複数の経路を探索する経路探索ステップと、
前記探索ステップで探索された前記複数の経路のうち、前記位置検出手段で検出された前記現在位置が存在する誘導経路を選別する選別ステップと、
前記探索ステップで探索された前記複数の経路のうち、前記誘導経路以外の経路の交通情報を取得する交通情報取得ステップと、
前記現在位置が前記誘導経路上の移動を開始した時点から実際の時間経過に応じて、前記交通情報取得ステップで取得した前記交通情報を利用し、前記誘導経路以外の経路上を移動する仮想位置を推定する仮想位置推定ステップと、
前記経路、前記現在位置、および前記仮想位置を表示する表示ステップと、
を、備えることを特徴とするナビゲーション方法。
【請求項11】
コンピュータをナビゲーション装置として機能させるプログラムであって、
移動体の現在位置を検出する位置検出部と、
目的地までの複数の経路を探索する経路探索部と、
前記探索部で探索された前記複数の経路のうち、前記位置検出手段で検出された前記現在位置が存在する誘導経路を選別する選別部と、
前記探索部で探索された前記複数の経路のうち、前記誘導経路以外の経路の交通情報を取得する交通情報取得部と、
前記現在位置が前記誘導経路上の移動を開始した時点から実際の時間経過に応じて、前記交通情報取得部で取得した前記交通情報を利用し、前記誘導経路以外の経路上を移動する仮想位置を推定する仮想位置推定部と、
前記経路、前記現在位置、および前記仮想位置を表示させる表示制御部と、
を、備えることを特徴とするプログラム。
【請求項1】
目的地までの経路を探索する経路探索手段と、
前記経路探索手段で探索された前記経路の交通情報を取得する交通情報取得手段と、
前記交通情報取得手段で取得した前記交通情報を利用し、所定の開始時点から実際の時間経過に応じて前記経路上を移動する仮想位置を推定する仮想位置推定手段と、
前記経路および前記仮想位置を表示する表示手段と、
を、備えることを特徴とするナビゲーション装置。
【請求項2】
移動体の現在位置を検出する位置検出手段と、
目的地までの複数の経路を探索する経路探索手段と、
前記探索手段で探索された前記複数の経路のうち、前記位置検出手段で検出された前記現在位置が移動する誘導経路を選別する選別手段と、
前記探索手段で探索された前記複数の経路のうち、前記誘導経路以外の経路の交通情報を取得する交通情報取得手段と、
前記交通情報取得手段で取得した前記交通情報を利用し、前記現在位置が前記誘導経路上の移動を開始した時点から実際の時間経過に応じて前記誘導経路以外の経路上を移動する仮想位置を推定する仮想位置推定手段と、
前記経路、前記現在位置、および前記仮想位置を表示する表示手段と、
を、備えることを特徴とするナビゲーション装置。
【請求項3】
請求項1または2に記載されたナビゲーション装置において、
前記交通情報取得手段は、前記交通情報として渋滞情報を取得する
ことを特徴とするナビゲーション装置。
【請求項4】
請求項1または2に記載されたナビゲーション装置において、
前記交通情報取得手段は、前記交通情報として渋滞の程度を示す渋滞レベル情報を含む渋滞情報を取得する
ことを特徴とするナビゲーション装置。
【請求項5】
請求項1または2に記載されたナビゲーション装置において、
前記交通情報取得手段は、前記交通情報の情報源ごとに前記交通情報の信頼度を算出する信頼度算出手段、
を備えることを特徴とするナビゲーション装置。
【請求項6】
請求項1または2に記載されたナビゲーション装置において、
前記仮想位置の目的地への到達予想時間を算定する予想手段
を備え、
前記表示手段は前記予想手段によって算定された前記仮想位置の到達予想時間を表示する
ことを特徴とするナビゲーション装置。
【請求項7】
請求項2に記載されたナビゲーション装置において、
前記現在位置が前記目的地に到達したことを検出する現在位置到達検出手段、
を備え、
前記表示手段は、前記現在位置到達検出手段により現在位置が目的地に到達したことが検出されたとき、前記仮想位置を表示する
ことを特徴とするナビゲーション装置。
【請求項8】
請求項2に記載されたナビゲーション装置において、
前記仮想位置が前記目的地に到達したことを検出する仮想位置到達検出手段、
を備え、
前記表示手段は、前記仮想位置到達検出手段により仮想位置が目的地に到達したことが検出されたとき、前記現在位置または他の仮想位置を表示する
ことを特徴とするナビゲーション装置。
【請求項9】
請求項2に記載されたナビゲーション装置において、
前記交通情報取得手段は、
前記交通情報を保持する保持手段と、
前記保持手段によって保持された前記交通情報の内容と、新しく取得した交通情報の内容とを比較する比較手段と、
前記比較手段により、前記保持された交通情報の内容と前記新しく取得した交通情報の内容との間に変更の有無を判断する変更判断手段と、
を備え、
前記表示手段は、
前記変更判断手段によって、交通情報の内容に変更があった場合、前記仮想位置を表示する
ことを特徴とするナビゲーション装置。
【請求項10】
移動体の現在位置を検出する位置検出ステップと、
目的地までの複数の経路を探索する経路探索ステップと、
前記探索ステップで探索された前記複数の経路のうち、前記位置検出手段で検出された前記現在位置が存在する誘導経路を選別する選別ステップと、
前記探索ステップで探索された前記複数の経路のうち、前記誘導経路以外の経路の交通情報を取得する交通情報取得ステップと、
前記現在位置が前記誘導経路上の移動を開始した時点から実際の時間経過に応じて、前記交通情報取得ステップで取得した前記交通情報を利用し、前記誘導経路以外の経路上を移動する仮想位置を推定する仮想位置推定ステップと、
前記経路、前記現在位置、および前記仮想位置を表示する表示ステップと、
を、備えることを特徴とするナビゲーション方法。
【請求項11】
コンピュータをナビゲーション装置として機能させるプログラムであって、
移動体の現在位置を検出する位置検出部と、
目的地までの複数の経路を探索する経路探索部と、
前記探索部で探索された前記複数の経路のうち、前記位置検出手段で検出された前記現在位置が存在する誘導経路を選別する選別部と、
前記探索部で探索された前記複数の経路のうち、前記誘導経路以外の経路の交通情報を取得する交通情報取得部と、
前記現在位置が前記誘導経路上の移動を開始した時点から実際の時間経過に応じて、前記交通情報取得部で取得した前記交通情報を利用し、前記誘導経路以外の経路上を移動する仮想位置を推定する仮想位置推定部と、
前記経路、前記現在位置、および前記仮想位置を表示させる表示制御部と、
を、備えることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−203797(P2010−203797A)
【公開日】平成22年9月16日(2010.9.16)
【国際特許分類】
【出願番号】特願2009−46714(P2009−46714)
【出願日】平成21年2月27日(2009.2.27)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
【公開日】平成22年9月16日(2010.9.16)
【国際特許分類】
【出願日】平成21年2月27日(2009.2.27)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
[ Back to top ]