
ナビゲーション装置、ナビゲーション方法、ナビゲーションプログラム、および、自動車
【課題】車両側に余計な装備を持たず、インフラ整備に頼らずに、安価な構成で移動体にとって安全なルート探索を実現できるようにすることを課題とする。
【解決手段】リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別に記憶しておき、設定された2点間の経路計算を実行して、ノードの接続点に関して特別コストの存在有無を判断し、特別コストの存在が確認された場合、車種別対応表を参照してコストの修正を実行する。
【解決手段】リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別に記憶しておき、設定された2点間の経路計算を実行して、ノードの接続点に関して特別コストの存在有無を判断し、特別コストの存在が確認された場合、車種別対応表を参照してコストの修正を実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置、ナビゲーション方法、ナビゲーションプログラム、および、自動車に関する。
【背景技術】
【0002】
自動車のナビゲーション装置においては、利用者が設定する目的地までの経路を計算し、自動車の走行にしたがって現在位置とその経路との関係をディスプレイに可視的に表示することが一般的に行われている。
【0003】
ドライバは、この恩恵を受けて、フロントガラス越しに見える風景とカーナビゲーション装置のディスプレイに表示される立体地図とを見比べて現在位置を容易に把握できる。カーナビゲーション装置が普及する前は、ドライバにおいては、その都度紙媒体の地図冊子を見開いて、交差点、コンビニエンスストア、標識等の目印を頼りに現在位置を確認していた。そのような時代からは大きな進歩であることは確かである。
【0004】
今日、車両走行時において、位置検出器により検出される自車両位置がカーブ警告ポイントに近付いた場合には、減速指示を含む警告メッセージを音声出力装置から出力し、減速警告ポイントに近付いた場合には、車両速度について注意を喚起する内容の警告メッセージを出力する手法が提案されている(特許文献1)。また、カーナビゲーション装置により道路標識側に設置された発信器から発信された規制情報を受信して、規制情報、又は、規制情報と車両情報に基づいて車両が道路標識の設置された道路に進入可能であるかどうかを判断する手法が提案されている(特許文献2)。
【0005】
【特許文献1】特開2002−260191号公報
【特許文献2】特開2006−39928号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した従来例においては、特許文献1のようなケースの場合、警告メッセージを出力するために各種機器を装備する必要があり、装置構成の規模が大きくなったり、機器の点数が増えてコストが嵩む虞があった。また、特許文献2のようなケースの場合には、道路標識側に発信器が必要なことから、インフラ整備やシステム全体の規模が大きくなって目的達成に向けてコストの増大は避けられないものであった。
【0007】
本発明の目的は、車両側に余計な装備を持たず、インフラ整備に頼らずに、安価な構成で移動体にとって安全なルート探索を実現することが可能なナビゲーション装置、ナビゲーション方法、ナビゲーションプログラム、および、自動車を提供することにある。
【課題を解決するための手段】
【0008】
上述した課題を解決し、上記目的を達成するため、本発明の請求項1に係るナビゲーション装置は、現在位置を取得する慣性航法装置に接続され、移動体の現在位置を取得するナビゲーション装置であって、リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別に記憶する車種別記憶手段と、始点および終点に基づく2点間を設定する設定手段と、前記設定手段で設定された2点間の経路計算を実行する経路計算手段と、前記経路計算手段による経路計算を実行する際に、ノードの接続点に関して特別コストの存在有無を判断する判断手段と、前記判断手段により特別コストの存在が確認された場合、前記車種別記憶手段に記憶される対応表を参照してコストの修正を実行するコスト修正手段と、を備えたことを特徴とするものである。
【0009】
請求項2の発明は、請求項1において、前記コスト修正手段でコストの修正が実行された場合、移動体の安全ルートを可視的に提示する提示手段をさらに有したことを特徴とする。
【0010】
請求項3の発明は、請求項2において、前記ナビゲーション装置にディスプレイが接続されており、前記提示手段は、前記ディスプレイ上に表示態様により提示することを特徴とする。
【0011】
請求項4の発明は、請求項2において、前記ナビゲーション装置にスピーカが接続されており、前記提示手段は、前記スピーカより音声で提示することを特徴とする。
【0012】
請求項5の発明は、請求項1から4のいずれか1つにおいて、前記ナビゲーション装置に通信手段が接続されており、前記通信手段を用いて前記対応表を更新する更新手段をさらに有したことを特徴とする。
【0013】
請求項6の発明は、請求項1から5のいずれか1つにおいて、前記ナビゲーション装置に操作手段が接続されており、前記操作手段を用いて前記対応表を更新する手動更新手段をさらに備えたことを特徴とする。
【0014】
また、請求項7の発明に係るナビゲーション方法は、現在位置を取得する慣性航法装置に接続され、移動体の現在位置を取得するナビゲーション方法であって、始点および終点に基づく2点間を設定する第1ステップと、前記第1ステップで設定された2点間の経路計算を実行する第2ステップと、前記第2ステップによる経路計算を実行する際に、ノードの接続点に関して特別コストの存在有無を判断する第3ステップと、リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別に第2メモリに記憶しており、前記第3ステップにより特別コストの存在が確認された場合、前記メモリに記憶される対応表を参照してコストの修正を実行する第4ステップと、を含んだことを特徴とするものである。
【0015】
また、請求項8の発明に係るナビゲーションプログラムは、現在位置を取得する慣性航法装置に接続され、移動体の現在位置を取得する処理をコンピュータにより実行可能なナビゲーションプログラムであって、前記コンピュータに、始点および終点に基づく2点間を設定する第1ステップと、前記第1ステップで設定された2点間の経路計算を実行する第2ステップと、前記第2ステップによる経路計算を実行する際に、ノードの接続点に関して特別コストの存在有無を判断する第3ステップと、リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別にメモリに記憶しており、前記第3ステップにより特別コストの存在が確認された場合、前記メモリに記憶される対応表を参照してコストの修正を実行する第4ステップと、を含んだことを特徴とするものである。
【0016】
また、請求項9の発明に係る自動車は、自動車であって、ディスプレイと、慣性航法装置を用いて、少なくとも現在位置および進行情報を検出する位置検出ユニットと、ナビゲーション装置と、を備え、前記ナビゲーション装置は、リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別に記憶する車種別記憶手段と、始点および終点に基づく2点間を設定する設定手段と、前記設定手段で設定された2点間の経路計算を実行する経路計算手段と、前記経路計算手段による経路計算を実行する際に、ノードの接続点に関して特別コストの存在有無を判断する判断手段と、前記判断手段により特別コストの存在が確認された場合、前記車種別記憶手段に記憶される対応表を参照してコストの修正を実行するコスト修正手段と、前記コスト修正手段でコストの修正が実行された場合、移動体の安全ルートを可視的に提示する提示手段と、を備えたことを特徴とするものである。
【発明の効果】
【0017】
本発明は、車両側に余計な装備を持たず、インフラ整備に頼らずに、安価な構成で移動体にとって安全なルート探索を実現することが可能である。
【発明を実施するための最良の形態】
【0018】
以下、添付図面を参照して、本発明に係る一実施の形態について詳細に説明する。以下に説明する実施形態では、ナビゲーション装置において、慣性航法装置として、非接触慣性航法装置を例に挙げて説明するが、本発明はこれに限定されず、移動体の一例となる自動車の車速パルスセンサを利用するものにも適用可能であることはいうまでもない。
【0019】
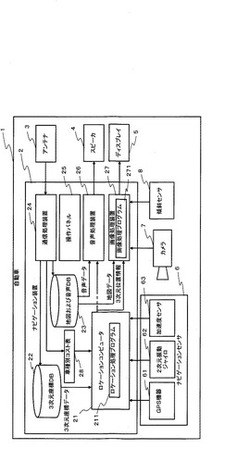
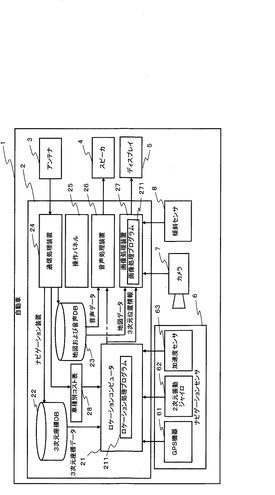
まず、全体の構成について説明する。図1は本発明の一実施形態による自動車の内部構成例を示すブロック図である。本実施形態の自動車1は、たとえば図1に示したように、以下に説明するが、本実施形態の3次元マップマッチングにより3次元位置情報の取得等を行うナビゲーション装置2、無線通信により各種の情報を授受するためのアンテナ3、音声を出力するスピーカ4、画像を表示するディスプレイ5、自車の現在位置を検出するGPS機器61、進行情報となる方位、移動量をそれぞれ検出する2次元振動ジャイロ62および加速度センサ63を具備しているナビゲーションセンサ6(非接触慣性航法装置を指す)、自車の前方景色を撮影して画像を入力するCCD等のカメラ7、自車の傾斜を検知する傾斜センサ8等により構成されている。自動車1の制御系、電気系、エンジン部位等の構成は、本発明の趣旨からその説明を省略する。なお、ナビゲーションセンサ6は、自車の現在位置と進行情報を検出できるものであればその他の構成であってもよい。
【0020】
ナビゲーション装置2は、以下に詳述するが、GPSからの測位が困難な場所(区間)でのナビゲーションセンサ6の誤差解消および3次元マップマッチングを実現するものであり、たとえば、ロケーションコンピュータ21、領域の一部もしくは全部の3次元座標データ(3次元折線形状データ)を蓄積する3次元座標データベース(3次元座標DB)22、領域の一部もしくは全部の2次元地図データおよび右左折等のポイントに応じて生成されるべき音声情報(音声データおよび生成ポイントの組み合わせ)を蓄積する地図および音声データベース(地図および音声DB)23、通信処理装置24、操作パネル25、音声処理装置26、画像処理装置27、車種別コスト表(記憶媒体としてテーブルメモリを指す)28等により構成されている。
【0021】
ロケーションコンピュータ21は、CPU、ROMおよびRAMによる制御ユニット、本実施形態のセンサ誤差解消および3次元マップマッチング処理等を実現するためのロケーション処理プログラム211、本実施形態による安全な走行ルートの探索プログラム等を具備している。このロケーションコンピュータ21は、ナビゲーションセンサ6に接続され、GPS機器61から現在位置情報、2次元振動ジャイロ62から方位、そして、加速度センサ63から移動量をそれぞれ入力してX−Y座標系の2次元マップマッチングを実行し、さらに、3次元座標DB22から3次元座標データを読み出してX−YZ座標系でのZ座標位置情報を算出する。
【0022】
このロケーションコンピュータ21は、Z座標位置情報に基づいて移動距離の補正を行ってから3次元位置情報を求めて画像処理装置27に供給するものである。とくに、GPSからの測位が困難なトンネル内、ビルの陰等の区間については、3次元座標DB22に記憶する座標に対してあらかじめGPS不能区間を示す道路属性をもたせておき、ナビゲーションセンサ6より想定以上の加速を検出した際は、坂道(上り・下り)、カーブ(・・・度)などの混在した道路形状を分別した道路属性の種類に応じて加速度のキャンセルを行い、正確な移動距離を求めるものである。
【0023】
通信処理装置24は、アンテナ3に接続され、無線通信によってアンテナ3を介して各種の情報(渋滞情報、2次元地図データ、3次元座標データ、音声情報等)を取得する。通信処理装置24は、アンテナ3を介して受信される2次元地図データや音声情報を地図および音声DB23に出力する。これにより、地図および音声DB23の更新処理が実行される。また、通信処理装置24は、アンテナ3を介して受信される3次元座標データを3次元座標DB22に出力する。これにより、3次元座標DB22の更新処理が実行される。
【0024】
操作パネル25においては、ここではナビゲーション装置自体に設けられている例が示されているが、本発明はこれに限定されるものではなく、ナビゲーション装置外に設けてナビゲーション装置に対して操作信号を送る構成としてもよい。操作パネル25は、出発地、目的地の入力により経路要求をしたり、候補として挙げられる経路の選択をしたり、本実施形態のカメラ撮影画像によるナビゲーション表示と2次元地図によるナビゲーション表示間の切り替えを指示するための操作ボタン等を備えている。
【0025】
音声処理装置26は、ロケーションコンピュータ21、地図および音声DB23等に接続され、地図および音声DB23を参照してロケーションコンピュータ2から供給される3次元位置情報に基づいて真の現在位置に応じたナビゲーションのための音声データを後段に接続されるスピーカ4に供給する。このナビゲーションにおいては、安全ルート探索の結果を音声によって報知することも含まれる。スピーカ4は、音声処理装置26から音声データを入力して音声を再生する。
【0026】
画像処理装置27は、ロケーションコンピュータ21、地図および音声DB23等に接続され、ロケーションコンピュータ21から供給される3次元位置情報に基づいて真の現在位置に応じた経路案内画像を生成し、その画像をカメラ7から供給される風景の画像に重畳して後段に接続されるディスプレイ5に供給する。この画像処理装置27は、傾斜センサ8にも接続され、その傾斜センサ8から供給される傾斜角度に応じて経路案内画像の角度をカメラ座標系に整合させる。ディスプレイ5は、画像処理装置27に接続され、そこから出力される画像情報に基づく画像を表示する。
【0027】
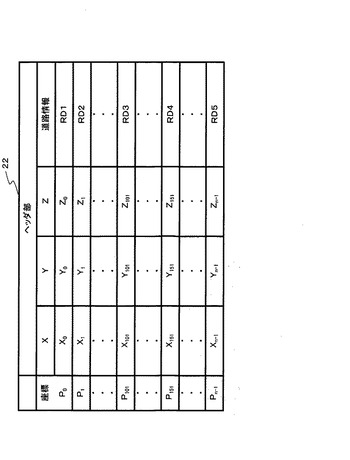
つぎに、主要なデータベースについて詳述する。図2は本実施形態による3次元座標DB22の一例を示す図である。3次元座標DB22は、たとえば図2に示したように、ヘッダ部を先頭にして座標ポイント毎にX,Y,Z座標データを対応付けて記憶している。一例として、座標ポイントP0(X0,Y0,Z0)、・・・、Pn-1(Xn-1,Yn-1,Zn-1)のように順に記憶されている。3次元座標データの計測手法にもよるが、座標ポイントは、たとえば1m間隔でもよいが、それ以上もしくはそれ以下の間隔でもよいことは言うまでもない。
【0028】
この3次元座標DB22は、本実施形態に必要な道路情報RD1,RD2・・・や、GPSからの測位が困難なトンネル内、ビルの陰等の区間については、各座標ポイントに対してあらかじめGPS不能区間を示す道路属性をもたせている。経路については、個々または組み合わせについて異なる道路属性を割り当て、このような座標ポイントを通過する際は、道路形状や走行上の環境から通常を超える加速度の発生を確認できるように補正処理が配慮される。これにより、通常を超える部分の加速度がキャンセルされ、正確な移動状態の把握、すなわち、誤差の累積を抑制した移動距離の算出が可能となる。
【0029】
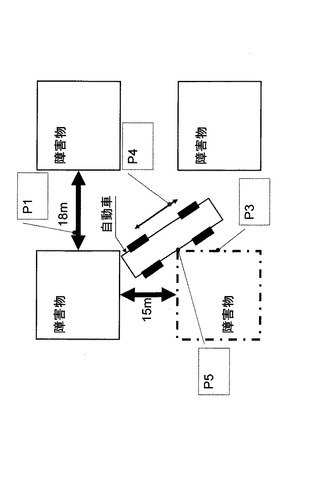
以下、図3、図4、および、図5を用いて本実施形態の仕組みについて説明する。図3は本実施形態による右左折時の仕組みを説明する図、図4は本実施形態による坂道の仕組みを説明する図、そして、図5は本実施形態による車両の寸法と重心データに基づく仕組みを説明する図である。
【0030】
本実施形態においては、トラック等の大きな車体を持った自動車に対して有効なルートを提供すること、十分には広くない道路同士の交差点において曲がりそこねを抑止すること、勾配の急激な変化による車底擦りを抑制すること、運転手のスキルを考慮することが目的となる。
【0031】
そして、現状は、カーナビゲーションのルート計算に関して車体の大きさが全く考慮されていないことや、ホイールベースの長いトラックなどは普通に引いたルートだと通れない可能性があるためカーナビのルート計算に頼らず独自で判断して太い道路を通るようにしていることが現実として挙げられる。また、経験に頼ったルートが選ばれるため必要以上に遠回りをしたルートを自動車が通っていることもあって、経済的にも良くなく、環境的にも良くないのが実情である。
【0032】
そこで、つぎの仕組みを検討する。すなわち、
(P1)道路データに幅員を持たせる。
(P2)道路に高さデータを持たせる。
(P3)両側に壁・溝があるかどうかも考慮する。
(P4)車種データを入力して、その車種から推測できる必要な寸法を取得する。
(P5)左右の内輪差を推測する。
(P6)坂道を上るとき下をこするかどうかを推測する。
その他に、重心によりカーブの進入速度を推測したり、Geometry情報を動的に考慮すると計算量が膨大になるので代表パラメータを用いてリンクコストに反映させる方式をとるものとする。また、ドライバーの技量をコストに反映させる点では、ドライバーの技量が低い場合には、見かけ上の車両ボリュームを大きくすることで対応する。
【0033】
ルート計算のアルゴリズムとしては、ノードの場合には、進入、流出の2つのリンクの接続コストパラメータを車種別コスト表から取得する。そして、最短経路を使用するアルゴリズムにて計算する。また、リンクの場合には、リンク中に存在する元交差点に関する情報を格納する。この場合、「元交差点」は複数存在し、通行困難と思われる交差点はなるべくノードとして残すとよい。コスト反映自体はノードと同じものとなる。
【0034】
図1に示す車種別コスト表28においては、幅員、接続角度、壁の有無等がわかれば理論計算は可能である。実際のアプリケーションでは計算機パワーを使いたくないので、これらをあらかじめ計算しておいて表にまとめておくものとする。
【0035】
その他として、細い道における電信柱の存在も重要な道路情報となる。
【0036】
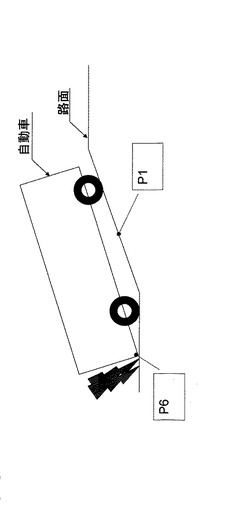
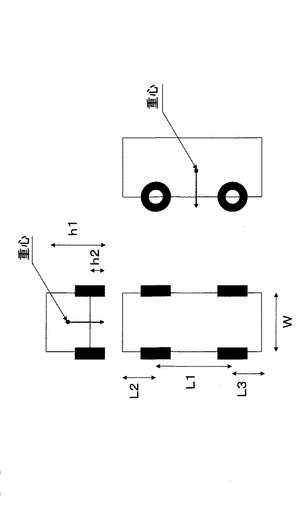
図3および図4の仕組み説明では、図5に示すように、自動車の寸法等がパラメータとして必要になる。すなわち、重心データ、各種寸法である。寸法として、車高h1、車輪半径h2、前後輪の間隔L1、先端と前輪中心との間隔L2、後端と後輪中心との間隔L3が必要となる。
【0037】
図3において、幅員が18mの道路から幅員15mの道路に左折する場合、まず計算上必要なパラメータは、前述の幅員情報(P1)、壁・溝情報(P3)、車種別寸法(P4)、内輪差(P5)で判断される。同様に、図4においては、傾斜のある道路に差し掛かるところやそこから平坦な道路に差し掛かるところで自動車の前部もしくは後部のこすりが問題となる。そのために、幅員情報(P1)およびこするかどうかを推測するための情報(P6)が必要となる。
【0038】
以上の対策を施すことにより、実際に通れる最も経済的なルートが引かれるようになり、スキル別(可能性、快適性)のルートを引くことができる。また、車ごとに通れるルートを分けることができ、車の底を擦らないように回避できる。また、車を擦りそうな度合いを通知することもできる。
【0039】
ここで、車種別コスト表28についてもう少し言及する。車種別コスト表はあらかじめ用意するものである。もちろん、ユーザが直接入力しなくてもよく、初期状態では代表的な車種だけをもつと容量上のメリットが得られる。また、初期状態で存在しない車種のパラメータをサーバに用意しておき、自動車との通信によりダウンロード対応で更新するようにしてもよい。また、特殊車両等を考慮して、ユーザの独自入力も機能として追加するとよい。
【0040】
車種別コスト表28の準備として、以下のパラメータを考慮して「リンク間コスト」を分類する。
(1)入出路の接続角度
(2)入出路の道路幅員
(3)入出路のおける壁、溝の有無
各分類に対してコストを対応させる表を作成する。このとき上記のパラメータに対してひとつの数値を対応させる。これは表引きを簡単にするためである。
【0041】
この車種別コスト表28は車種別に存在し、ユーザの設定に応じてたとえばダウンロードして使用する。主要な車種は最初から持っていてもよい。車種別パラメータをユーザ設定した場合にはサーバでそのパラメータを送付し再計算された表をダウンロードするものとする。
【0042】
そして、車種別コスト表28に基づく計算においては、ある交差点に対して入路と出路が決定した場合、その間に「特別コスト」が存在しているかどうかを調べる。これは経路データに格納されているものとする。また、存在しなければ通常のコスト計算を行うものとする。さらに、特別コストが存在していた場合にはその番号に対応するコストを表から取得し、コストに積算するもとする。ただし、「通行不可」のコスト(負の数字となると思われる)も存在することに注意する。
【0043】
データ構造としては、以下のパラメータを考慮して「リンク間コスト」を分類する。
(1)入出路の接続角度
(2)入出路の道路幅員
(3)入出路のおける壁、溝の有無
上記分類にて車種別コスト表28を作成する。もちろん、ユーザー設定の自由度を設けておくことも必要である。
【0044】
つづいて、動作について説明する。図6は本実施形態によるナビゲーション処理の一例を説明するフローチャートであり、図7は本実施形態による車両安全ルート優先ナビゲーション処理を説明するフローチャートである。以下に説明する動作は、主として、ナビゲーション装置2のロケーションコンピュータ21および画像処理装置23において、各制御ユニットおよびプログラムにより実現されるものである。
【0045】
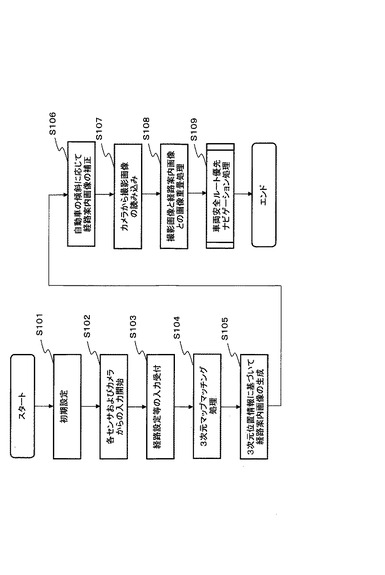
ナビゲーション装置2の電源が投入されると、初期設定が実行され(ステップS101)、ナビゲーションセンサ6および傾斜センサ8からそれぞれにおいて検知される情報の入力が開始される(ステップS102)。つづいて、ドライバもしくは同乗者から経路設定(出発地、目的地等)等の入力が受け付けられ、メモリに記憶される(ステップS103)。ここで、メモリは図示せぬがナビゲーション装置2全体を制御する制御ユニットの記憶装置でもよく、あるいは、ロケーションコンピュータ21や画像処理装置27のメモリでもよい。
【0046】
以上の準備が整い、自動車2が走行を開始すると、ロケーションコンピュータ21において、3次元マップマッチング処理が開始される(ステップS104)。この3次元マップマッチング処理により3次元位置情報が決定すると、画像処理装置27において、その3次元位置情報に基づいて経路案内画像(矢印で示すものであって右左折の案内、色等で示すものであって識別可能な坂道の案内、数字等で示すものであって車線数が多いときの走行ラインの案内等)が生成される(ステップS105)。
【0047】
この経路案内画像には、傾斜センサ8から供給される自車の傾斜角度に応じてカメラ座標系としての補正が施される(ステップS106)。そして、カメラ7から撮影画像が読み込まれて(ステップS107)、その撮影画像に傾斜補正された経路案内画像が重畳される(ステップS108)。このようにして得られた重畳画像データに基づく画像はディスプレイ5に出力されて表示される。そして、本実施形態の車両安全ルート優先ナビゲーション処理が実行される(ステップS109)。
【0048】
なお、音声処理装置26においては、ロケーションコンピュータ21から供給された3次元位置情報に基づいて地図および音声DB23から音声情報が抽出され、その音声情報のうち音声データに基づいて音声ガイダンスが生成される。この音声ガイダンスはスピーカ4から音声として出力されるようにしてもよい。
【0049】
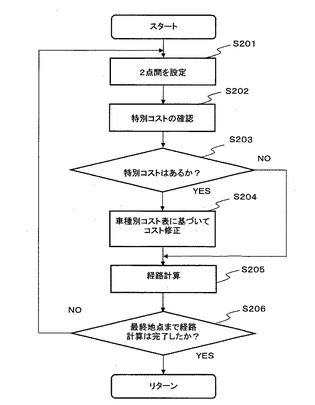
つづいて、図7を用いて車両安全ルート優先ナビゲーション処理について詳述する。まず、ルート探索として、ユーザの操作に応答して経路が設定される。そして、その経路上で最初の2点間が設定される(ステップS201)。そして、ノードの接続点に関して特別コストの存在が確認される(ステップS202)。特別コストがある場合には(ステップS203のYESルート)、車種別リンク表28によりコストが修正され、処理はステップS205に進む(ステップS204)。特別コストがない場合は(ステップS203のNOルート)、そのまま処理はステップS205に移行する。
【0050】
ステップS205においては、経路計算が実行され、つづいて最終地点(終点)まで計算が完了したのか判断される(ステップS206)。最終地点まで計算が完了した場合には(ステップS206のYESルート)、処理は図6に戻る。一方、まだ完了していない場合には(ステップS206のNOルート)、処理はステップS201に戻り、以上の処理が繰り返し実行される。
【0051】
以上説明したように、本実施形態によれば、車両側に余計な装備を持たず、インフラ整備に頼らずに、安価な構成で移動体にとって安全なルート探索を実現することが可能である。
【産業上の利用可能性】
【0052】
本発明は、船舶等の業種においても産業上有用であるとともに、位置情報を取得することが可能な携帯電話、携帯情報端末、万歩計(登録商標)、携帯ゲーム機等の電化製品市場においても有用である。
【図面の簡単な説明】
【0053】
【図1】本発明の一実施形態による自動車の内部構成例を示すブロック図である。
【図2】本実施形態による3次元座標DBの一例を示す図である。
【図3】本実施形態による右左折時の仕組みを説明する図である。
【図4】本実施形態による坂道の仕組みを説明する図である。
【図5】本実施形態による車両の寸法と重心データに基づく仕組みを説明する図である。
【図6】本実施形態によるナビゲーション処理の一例を説明するフローチャートである。
【図7】本実施形態による車両安全ルート優先ナビゲーション処理を説明するフローチャートである。
【符号の説明】
【0054】
1 自動車
2 ナビゲーション装置
3 アンテナ
4 スピーカ
5 ディスプレイ
6 ナビゲーションセンサ
7 カメラ
8 傾斜センサ
21 ロケーションコンピュータ
22 3次元座標DB
23 地図および音声DB
24 通信処理装置
25 操作パネル
26 音声処理装置
27 画像処理装置
28 車種別コスト表
61 GPS機器
62 2次元振動ジャイロ
63 加速度センサ
211 ロケーション処理プログラム
271 画像処理プログラム
【技術分野】
【0001】
本発明は、ナビゲーション装置、ナビゲーション方法、ナビゲーションプログラム、および、自動車に関する。
【背景技術】
【0002】
自動車のナビゲーション装置においては、利用者が設定する目的地までの経路を計算し、自動車の走行にしたがって現在位置とその経路との関係をディスプレイに可視的に表示することが一般的に行われている。
【0003】
ドライバは、この恩恵を受けて、フロントガラス越しに見える風景とカーナビゲーション装置のディスプレイに表示される立体地図とを見比べて現在位置を容易に把握できる。カーナビゲーション装置が普及する前は、ドライバにおいては、その都度紙媒体の地図冊子を見開いて、交差点、コンビニエンスストア、標識等の目印を頼りに現在位置を確認していた。そのような時代からは大きな進歩であることは確かである。
【0004】
今日、車両走行時において、位置検出器により検出される自車両位置がカーブ警告ポイントに近付いた場合には、減速指示を含む警告メッセージを音声出力装置から出力し、減速警告ポイントに近付いた場合には、車両速度について注意を喚起する内容の警告メッセージを出力する手法が提案されている(特許文献1)。また、カーナビゲーション装置により道路標識側に設置された発信器から発信された規制情報を受信して、規制情報、又は、規制情報と車両情報に基づいて車両が道路標識の設置された道路に進入可能であるかどうかを判断する手法が提案されている(特許文献2)。
【0005】
【特許文献1】特開2002−260191号公報
【特許文献2】特開2006−39928号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した従来例においては、特許文献1のようなケースの場合、警告メッセージを出力するために各種機器を装備する必要があり、装置構成の規模が大きくなったり、機器の点数が増えてコストが嵩む虞があった。また、特許文献2のようなケースの場合には、道路標識側に発信器が必要なことから、インフラ整備やシステム全体の規模が大きくなって目的達成に向けてコストの増大は避けられないものであった。
【0007】
本発明の目的は、車両側に余計な装備を持たず、インフラ整備に頼らずに、安価な構成で移動体にとって安全なルート探索を実現することが可能なナビゲーション装置、ナビゲーション方法、ナビゲーションプログラム、および、自動車を提供することにある。
【課題を解決するための手段】
【0008】
上述した課題を解決し、上記目的を達成するため、本発明の請求項1に係るナビゲーション装置は、現在位置を取得する慣性航法装置に接続され、移動体の現在位置を取得するナビゲーション装置であって、リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別に記憶する車種別記憶手段と、始点および終点に基づく2点間を設定する設定手段と、前記設定手段で設定された2点間の経路計算を実行する経路計算手段と、前記経路計算手段による経路計算を実行する際に、ノードの接続点に関して特別コストの存在有無を判断する判断手段と、前記判断手段により特別コストの存在が確認された場合、前記車種別記憶手段に記憶される対応表を参照してコストの修正を実行するコスト修正手段と、を備えたことを特徴とするものである。
【0009】
請求項2の発明は、請求項1において、前記コスト修正手段でコストの修正が実行された場合、移動体の安全ルートを可視的に提示する提示手段をさらに有したことを特徴とする。
【0010】
請求項3の発明は、請求項2において、前記ナビゲーション装置にディスプレイが接続されており、前記提示手段は、前記ディスプレイ上に表示態様により提示することを特徴とする。
【0011】
請求項4の発明は、請求項2において、前記ナビゲーション装置にスピーカが接続されており、前記提示手段は、前記スピーカより音声で提示することを特徴とする。
【0012】
請求項5の発明は、請求項1から4のいずれか1つにおいて、前記ナビゲーション装置に通信手段が接続されており、前記通信手段を用いて前記対応表を更新する更新手段をさらに有したことを特徴とする。
【0013】
請求項6の発明は、請求項1から5のいずれか1つにおいて、前記ナビゲーション装置に操作手段が接続されており、前記操作手段を用いて前記対応表を更新する手動更新手段をさらに備えたことを特徴とする。
【0014】
また、請求項7の発明に係るナビゲーション方法は、現在位置を取得する慣性航法装置に接続され、移動体の現在位置を取得するナビゲーション方法であって、始点および終点に基づく2点間を設定する第1ステップと、前記第1ステップで設定された2点間の経路計算を実行する第2ステップと、前記第2ステップによる経路計算を実行する際に、ノードの接続点に関して特別コストの存在有無を判断する第3ステップと、リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別に第2メモリに記憶しており、前記第3ステップにより特別コストの存在が確認された場合、前記メモリに記憶される対応表を参照してコストの修正を実行する第4ステップと、を含んだことを特徴とするものである。
【0015】
また、請求項8の発明に係るナビゲーションプログラムは、現在位置を取得する慣性航法装置に接続され、移動体の現在位置を取得する処理をコンピュータにより実行可能なナビゲーションプログラムであって、前記コンピュータに、始点および終点に基づく2点間を設定する第1ステップと、前記第1ステップで設定された2点間の経路計算を実行する第2ステップと、前記第2ステップによる経路計算を実行する際に、ノードの接続点に関して特別コストの存在有無を判断する第3ステップと、リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別にメモリに記憶しており、前記第3ステップにより特別コストの存在が確認された場合、前記メモリに記憶される対応表を参照してコストの修正を実行する第4ステップと、を含んだことを特徴とするものである。
【0016】
また、請求項9の発明に係る自動車は、自動車であって、ディスプレイと、慣性航法装置を用いて、少なくとも現在位置および進行情報を検出する位置検出ユニットと、ナビゲーション装置と、を備え、前記ナビゲーション装置は、リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別に記憶する車種別記憶手段と、始点および終点に基づく2点間を設定する設定手段と、前記設定手段で設定された2点間の経路計算を実行する経路計算手段と、前記経路計算手段による経路計算を実行する際に、ノードの接続点に関して特別コストの存在有無を判断する判断手段と、前記判断手段により特別コストの存在が確認された場合、前記車種別記憶手段に記憶される対応表を参照してコストの修正を実行するコスト修正手段と、前記コスト修正手段でコストの修正が実行された場合、移動体の安全ルートを可視的に提示する提示手段と、を備えたことを特徴とするものである。
【発明の効果】
【0017】
本発明は、車両側に余計な装備を持たず、インフラ整備に頼らずに、安価な構成で移動体にとって安全なルート探索を実現することが可能である。
【発明を実施するための最良の形態】
【0018】
以下、添付図面を参照して、本発明に係る一実施の形態について詳細に説明する。以下に説明する実施形態では、ナビゲーション装置において、慣性航法装置として、非接触慣性航法装置を例に挙げて説明するが、本発明はこれに限定されず、移動体の一例となる自動車の車速パルスセンサを利用するものにも適用可能であることはいうまでもない。
【0019】
まず、全体の構成について説明する。図1は本発明の一実施形態による自動車の内部構成例を示すブロック図である。本実施形態の自動車1は、たとえば図1に示したように、以下に説明するが、本実施形態の3次元マップマッチングにより3次元位置情報の取得等を行うナビゲーション装置2、無線通信により各種の情報を授受するためのアンテナ3、音声を出力するスピーカ4、画像を表示するディスプレイ5、自車の現在位置を検出するGPS機器61、進行情報となる方位、移動量をそれぞれ検出する2次元振動ジャイロ62および加速度センサ63を具備しているナビゲーションセンサ6(非接触慣性航法装置を指す)、自車の前方景色を撮影して画像を入力するCCD等のカメラ7、自車の傾斜を検知する傾斜センサ8等により構成されている。自動車1の制御系、電気系、エンジン部位等の構成は、本発明の趣旨からその説明を省略する。なお、ナビゲーションセンサ6は、自車の現在位置と進行情報を検出できるものであればその他の構成であってもよい。
【0020】
ナビゲーション装置2は、以下に詳述するが、GPSからの測位が困難な場所(区間)でのナビゲーションセンサ6の誤差解消および3次元マップマッチングを実現するものであり、たとえば、ロケーションコンピュータ21、領域の一部もしくは全部の3次元座標データ(3次元折線形状データ)を蓄積する3次元座標データベース(3次元座標DB)22、領域の一部もしくは全部の2次元地図データおよび右左折等のポイントに応じて生成されるべき音声情報(音声データおよび生成ポイントの組み合わせ)を蓄積する地図および音声データベース(地図および音声DB)23、通信処理装置24、操作パネル25、音声処理装置26、画像処理装置27、車種別コスト表(記憶媒体としてテーブルメモリを指す)28等により構成されている。
【0021】
ロケーションコンピュータ21は、CPU、ROMおよびRAMによる制御ユニット、本実施形態のセンサ誤差解消および3次元マップマッチング処理等を実現するためのロケーション処理プログラム211、本実施形態による安全な走行ルートの探索プログラム等を具備している。このロケーションコンピュータ21は、ナビゲーションセンサ6に接続され、GPS機器61から現在位置情報、2次元振動ジャイロ62から方位、そして、加速度センサ63から移動量をそれぞれ入力してX−Y座標系の2次元マップマッチングを実行し、さらに、3次元座標DB22から3次元座標データを読み出してX−YZ座標系でのZ座標位置情報を算出する。
【0022】
このロケーションコンピュータ21は、Z座標位置情報に基づいて移動距離の補正を行ってから3次元位置情報を求めて画像処理装置27に供給するものである。とくに、GPSからの測位が困難なトンネル内、ビルの陰等の区間については、3次元座標DB22に記憶する座標に対してあらかじめGPS不能区間を示す道路属性をもたせておき、ナビゲーションセンサ6より想定以上の加速を検出した際は、坂道(上り・下り)、カーブ(・・・度)などの混在した道路形状を分別した道路属性の種類に応じて加速度のキャンセルを行い、正確な移動距離を求めるものである。
【0023】
通信処理装置24は、アンテナ3に接続され、無線通信によってアンテナ3を介して各種の情報(渋滞情報、2次元地図データ、3次元座標データ、音声情報等)を取得する。通信処理装置24は、アンテナ3を介して受信される2次元地図データや音声情報を地図および音声DB23に出力する。これにより、地図および音声DB23の更新処理が実行される。また、通信処理装置24は、アンテナ3を介して受信される3次元座標データを3次元座標DB22に出力する。これにより、3次元座標DB22の更新処理が実行される。
【0024】
操作パネル25においては、ここではナビゲーション装置自体に設けられている例が示されているが、本発明はこれに限定されるものではなく、ナビゲーション装置外に設けてナビゲーション装置に対して操作信号を送る構成としてもよい。操作パネル25は、出発地、目的地の入力により経路要求をしたり、候補として挙げられる経路の選択をしたり、本実施形態のカメラ撮影画像によるナビゲーション表示と2次元地図によるナビゲーション表示間の切り替えを指示するための操作ボタン等を備えている。
【0025】
音声処理装置26は、ロケーションコンピュータ21、地図および音声DB23等に接続され、地図および音声DB23を参照してロケーションコンピュータ2から供給される3次元位置情報に基づいて真の現在位置に応じたナビゲーションのための音声データを後段に接続されるスピーカ4に供給する。このナビゲーションにおいては、安全ルート探索の結果を音声によって報知することも含まれる。スピーカ4は、音声処理装置26から音声データを入力して音声を再生する。
【0026】
画像処理装置27は、ロケーションコンピュータ21、地図および音声DB23等に接続され、ロケーションコンピュータ21から供給される3次元位置情報に基づいて真の現在位置に応じた経路案内画像を生成し、その画像をカメラ7から供給される風景の画像に重畳して後段に接続されるディスプレイ5に供給する。この画像処理装置27は、傾斜センサ8にも接続され、その傾斜センサ8から供給される傾斜角度に応じて経路案内画像の角度をカメラ座標系に整合させる。ディスプレイ5は、画像処理装置27に接続され、そこから出力される画像情報に基づく画像を表示する。
【0027】
つぎに、主要なデータベースについて詳述する。図2は本実施形態による3次元座標DB22の一例を示す図である。3次元座標DB22は、たとえば図2に示したように、ヘッダ部を先頭にして座標ポイント毎にX,Y,Z座標データを対応付けて記憶している。一例として、座標ポイントP0(X0,Y0,Z0)、・・・、Pn-1(Xn-1,Yn-1,Zn-1)のように順に記憶されている。3次元座標データの計測手法にもよるが、座標ポイントは、たとえば1m間隔でもよいが、それ以上もしくはそれ以下の間隔でもよいことは言うまでもない。
【0028】
この3次元座標DB22は、本実施形態に必要な道路情報RD1,RD2・・・や、GPSからの測位が困難なトンネル内、ビルの陰等の区間については、各座標ポイントに対してあらかじめGPS不能区間を示す道路属性をもたせている。経路については、個々または組み合わせについて異なる道路属性を割り当て、このような座標ポイントを通過する際は、道路形状や走行上の環境から通常を超える加速度の発生を確認できるように補正処理が配慮される。これにより、通常を超える部分の加速度がキャンセルされ、正確な移動状態の把握、すなわち、誤差の累積を抑制した移動距離の算出が可能となる。
【0029】
以下、図3、図4、および、図5を用いて本実施形態の仕組みについて説明する。図3は本実施形態による右左折時の仕組みを説明する図、図4は本実施形態による坂道の仕組みを説明する図、そして、図5は本実施形態による車両の寸法と重心データに基づく仕組みを説明する図である。
【0030】
本実施形態においては、トラック等の大きな車体を持った自動車に対して有効なルートを提供すること、十分には広くない道路同士の交差点において曲がりそこねを抑止すること、勾配の急激な変化による車底擦りを抑制すること、運転手のスキルを考慮することが目的となる。
【0031】
そして、現状は、カーナビゲーションのルート計算に関して車体の大きさが全く考慮されていないことや、ホイールベースの長いトラックなどは普通に引いたルートだと通れない可能性があるためカーナビのルート計算に頼らず独自で判断して太い道路を通るようにしていることが現実として挙げられる。また、経験に頼ったルートが選ばれるため必要以上に遠回りをしたルートを自動車が通っていることもあって、経済的にも良くなく、環境的にも良くないのが実情である。
【0032】
そこで、つぎの仕組みを検討する。すなわち、
(P1)道路データに幅員を持たせる。
(P2)道路に高さデータを持たせる。
(P3)両側に壁・溝があるかどうかも考慮する。
(P4)車種データを入力して、その車種から推測できる必要な寸法を取得する。
(P5)左右の内輪差を推測する。
(P6)坂道を上るとき下をこするかどうかを推測する。
その他に、重心によりカーブの進入速度を推測したり、Geometry情報を動的に考慮すると計算量が膨大になるので代表パラメータを用いてリンクコストに反映させる方式をとるものとする。また、ドライバーの技量をコストに反映させる点では、ドライバーの技量が低い場合には、見かけ上の車両ボリュームを大きくすることで対応する。
【0033】
ルート計算のアルゴリズムとしては、ノードの場合には、進入、流出の2つのリンクの接続コストパラメータを車種別コスト表から取得する。そして、最短経路を使用するアルゴリズムにて計算する。また、リンクの場合には、リンク中に存在する元交差点に関する情報を格納する。この場合、「元交差点」は複数存在し、通行困難と思われる交差点はなるべくノードとして残すとよい。コスト反映自体はノードと同じものとなる。
【0034】
図1に示す車種別コスト表28においては、幅員、接続角度、壁の有無等がわかれば理論計算は可能である。実際のアプリケーションでは計算機パワーを使いたくないので、これらをあらかじめ計算しておいて表にまとめておくものとする。
【0035】
その他として、細い道における電信柱の存在も重要な道路情報となる。
【0036】
図3および図4の仕組み説明では、図5に示すように、自動車の寸法等がパラメータとして必要になる。すなわち、重心データ、各種寸法である。寸法として、車高h1、車輪半径h2、前後輪の間隔L1、先端と前輪中心との間隔L2、後端と後輪中心との間隔L3が必要となる。
【0037】
図3において、幅員が18mの道路から幅員15mの道路に左折する場合、まず計算上必要なパラメータは、前述の幅員情報(P1)、壁・溝情報(P3)、車種別寸法(P4)、内輪差(P5)で判断される。同様に、図4においては、傾斜のある道路に差し掛かるところやそこから平坦な道路に差し掛かるところで自動車の前部もしくは後部のこすりが問題となる。そのために、幅員情報(P1)およびこするかどうかを推測するための情報(P6)が必要となる。
【0038】
以上の対策を施すことにより、実際に通れる最も経済的なルートが引かれるようになり、スキル別(可能性、快適性)のルートを引くことができる。また、車ごとに通れるルートを分けることができ、車の底を擦らないように回避できる。また、車を擦りそうな度合いを通知することもできる。
【0039】
ここで、車種別コスト表28についてもう少し言及する。車種別コスト表はあらかじめ用意するものである。もちろん、ユーザが直接入力しなくてもよく、初期状態では代表的な車種だけをもつと容量上のメリットが得られる。また、初期状態で存在しない車種のパラメータをサーバに用意しておき、自動車との通信によりダウンロード対応で更新するようにしてもよい。また、特殊車両等を考慮して、ユーザの独自入力も機能として追加するとよい。
【0040】
車種別コスト表28の準備として、以下のパラメータを考慮して「リンク間コスト」を分類する。
(1)入出路の接続角度
(2)入出路の道路幅員
(3)入出路のおける壁、溝の有無
各分類に対してコストを対応させる表を作成する。このとき上記のパラメータに対してひとつの数値を対応させる。これは表引きを簡単にするためである。
【0041】
この車種別コスト表28は車種別に存在し、ユーザの設定に応じてたとえばダウンロードして使用する。主要な車種は最初から持っていてもよい。車種別パラメータをユーザ設定した場合にはサーバでそのパラメータを送付し再計算された表をダウンロードするものとする。
【0042】
そして、車種別コスト表28に基づく計算においては、ある交差点に対して入路と出路が決定した場合、その間に「特別コスト」が存在しているかどうかを調べる。これは経路データに格納されているものとする。また、存在しなければ通常のコスト計算を行うものとする。さらに、特別コストが存在していた場合にはその番号に対応するコストを表から取得し、コストに積算するもとする。ただし、「通行不可」のコスト(負の数字となると思われる)も存在することに注意する。
【0043】
データ構造としては、以下のパラメータを考慮して「リンク間コスト」を分類する。
(1)入出路の接続角度
(2)入出路の道路幅員
(3)入出路のおける壁、溝の有無
上記分類にて車種別コスト表28を作成する。もちろん、ユーザー設定の自由度を設けておくことも必要である。
【0044】
つづいて、動作について説明する。図6は本実施形態によるナビゲーション処理の一例を説明するフローチャートであり、図7は本実施形態による車両安全ルート優先ナビゲーション処理を説明するフローチャートである。以下に説明する動作は、主として、ナビゲーション装置2のロケーションコンピュータ21および画像処理装置23において、各制御ユニットおよびプログラムにより実現されるものである。
【0045】
ナビゲーション装置2の電源が投入されると、初期設定が実行され(ステップS101)、ナビゲーションセンサ6および傾斜センサ8からそれぞれにおいて検知される情報の入力が開始される(ステップS102)。つづいて、ドライバもしくは同乗者から経路設定(出発地、目的地等)等の入力が受け付けられ、メモリに記憶される(ステップS103)。ここで、メモリは図示せぬがナビゲーション装置2全体を制御する制御ユニットの記憶装置でもよく、あるいは、ロケーションコンピュータ21や画像処理装置27のメモリでもよい。
【0046】
以上の準備が整い、自動車2が走行を開始すると、ロケーションコンピュータ21において、3次元マップマッチング処理が開始される(ステップS104)。この3次元マップマッチング処理により3次元位置情報が決定すると、画像処理装置27において、その3次元位置情報に基づいて経路案内画像(矢印で示すものであって右左折の案内、色等で示すものであって識別可能な坂道の案内、数字等で示すものであって車線数が多いときの走行ラインの案内等)が生成される(ステップS105)。
【0047】
この経路案内画像には、傾斜センサ8から供給される自車の傾斜角度に応じてカメラ座標系としての補正が施される(ステップS106)。そして、カメラ7から撮影画像が読み込まれて(ステップS107)、その撮影画像に傾斜補正された経路案内画像が重畳される(ステップS108)。このようにして得られた重畳画像データに基づく画像はディスプレイ5に出力されて表示される。そして、本実施形態の車両安全ルート優先ナビゲーション処理が実行される(ステップS109)。
【0048】
なお、音声処理装置26においては、ロケーションコンピュータ21から供給された3次元位置情報に基づいて地図および音声DB23から音声情報が抽出され、その音声情報のうち音声データに基づいて音声ガイダンスが生成される。この音声ガイダンスはスピーカ4から音声として出力されるようにしてもよい。
【0049】
つづいて、図7を用いて車両安全ルート優先ナビゲーション処理について詳述する。まず、ルート探索として、ユーザの操作に応答して経路が設定される。そして、その経路上で最初の2点間が設定される(ステップS201)。そして、ノードの接続点に関して特別コストの存在が確認される(ステップS202)。特別コストがある場合には(ステップS203のYESルート)、車種別リンク表28によりコストが修正され、処理はステップS205に進む(ステップS204)。特別コストがない場合は(ステップS203のNOルート)、そのまま処理はステップS205に移行する。
【0050】
ステップS205においては、経路計算が実行され、つづいて最終地点(終点)まで計算が完了したのか判断される(ステップS206)。最終地点まで計算が完了した場合には(ステップS206のYESルート)、処理は図6に戻る。一方、まだ完了していない場合には(ステップS206のNOルート)、処理はステップS201に戻り、以上の処理が繰り返し実行される。
【0051】
以上説明したように、本実施形態によれば、車両側に余計な装備を持たず、インフラ整備に頼らずに、安価な構成で移動体にとって安全なルート探索を実現することが可能である。
【産業上の利用可能性】
【0052】
本発明は、船舶等の業種においても産業上有用であるとともに、位置情報を取得することが可能な携帯電話、携帯情報端末、万歩計(登録商標)、携帯ゲーム機等の電化製品市場においても有用である。
【図面の簡単な説明】
【0053】
【図1】本発明の一実施形態による自動車の内部構成例を示すブロック図である。
【図2】本実施形態による3次元座標DBの一例を示す図である。
【図3】本実施形態による右左折時の仕組みを説明する図である。
【図4】本実施形態による坂道の仕組みを説明する図である。
【図5】本実施形態による車両の寸法と重心データに基づく仕組みを説明する図である。
【図6】本実施形態によるナビゲーション処理の一例を説明するフローチャートである。
【図7】本実施形態による車両安全ルート優先ナビゲーション処理を説明するフローチャートである。
【符号の説明】
【0054】
1 自動車
2 ナビゲーション装置
3 アンテナ
4 スピーカ
5 ディスプレイ
6 ナビゲーションセンサ
7 カメラ
8 傾斜センサ
21 ロケーションコンピュータ
22 3次元座標DB
23 地図および音声DB
24 通信処理装置
25 操作パネル
26 音声処理装置
27 画像処理装置
28 車種別コスト表
61 GPS機器
62 2次元振動ジャイロ
63 加速度センサ
211 ロケーション処理プログラム
271 画像処理プログラム
【特許請求の範囲】
【請求項1】
現在位置を取得する慣性航法装置に接続され、移動体の現在位置を取得するナビゲーション装置であって、
リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別に記憶する車種別記憶手段と、
始点および終点に基づく2点間を設定する設定手段と、
前記設定手段で設定された2点間の経路計算を実行する経路計算手段と、
前記経路計算手段による経路計算を実行する際に、ノードの接続点に関して特別コストの存在有無を判断する判断手段と、
前記判断手段により特別コストの存在が確認された場合、前記車種別記憶手段に記憶される対応表を参照してコストの修正を実行するコスト修正手段と、
を備えたことを特徴とするナビゲーション装置。
【請求項2】
前記コスト修正手段でコストの修正が実行された場合、移動体の安全ルートを可視的に提示する提示手段をさらに有したことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記ナビゲーション装置にディスプレイが接続されており、前記提示手段は、前記ディスプレイ上に表示態様により提示することを特徴とする請求項2に記載のナビゲーション装置。
【請求項4】
前記ナビゲーション装置にスピーカが接続されており、前記提示手段は、前記スピーカより音声で提示することを特徴とする請求項2に記載のナビゲーション装置。
【請求項5】
前記ナビゲーション装置に通信手段が接続されており、前記通信手段を用いて前記対応表を更新する更新手段をさらに有したことを特徴とする請求項1から4のいずれか1つに記載のナビゲーション装置。
【請求項6】
前記ナビゲーション装置に操作手段が接続されており、前記操作手段を用いて前記対応表を更新する手動更新手段をさらに備えたことを特徴とする請求項1から5のいずれか1つに記載のナビゲーション装置。
【請求項7】
現在位置を取得する慣性航法装置に接続され、移動体の現在位置を取得するナビゲーション方法であって、
始点および終点に基づく2点間を設定する第1ステップと、
前記第1ステップで設定された2点間の経路計算を実行する第2ステップと、
前記第2ステップによる経路計算を実行する際に、ノードの接続点に関して特別コストの存在有無を判断する第3ステップと、
リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別に第2メモリに記憶しており、前記第3ステップにより特別コストの存在が確認された場合、前記メモリに記憶される対応表を参照してコストの修正を実行する第4ステップと、
を含んだことを特徴とするナビゲーション方法。
【請求項8】
現在位置を取得する慣性航法装置に接続され、移動体の現在位置を取得する処理をコンピュータにより実行可能なナビゲーションプログラムであって、
前記コンピュータに、
始点および終点に基づく2点間を設定する第1ステップと、
前記第1ステップで設定された2点間の経路計算を実行する第2ステップと、
前記第2ステップによる経路計算を実行する際に、ノードの接続点に関して特別コストの存在有無を判断する第3ステップと、
リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別にメモリに記憶しており、前記第3ステップにより特別コストの存在が確認された場合、前記メモリに記憶される対応表を参照してコストの修正を実行する第4ステップと、
を含んだことを特徴とするナビゲーション方法。
【請求項9】
自動車であって、
ディスプレイと、
慣性航法装置を用いて、少なくとも現在位置および進行情報を検出する位置検出ユニットと、
ナビゲーション装置と、
を備え、
前記ナビゲーション装置は、
リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別に記憶する車種別記憶手段と、
始点および終点に基づく2点間を設定する設定手段と、
前記設定手段で設定された2点間の経路計算を実行する経路計算手段と、
前記経路計算手段による経路計算を実行する際に、ノードの接続点に関して特別コストの存在有無を判断する判断手段と、
前記判断手段により特別コストの存在が確認された場合、前記車種別記憶手段に記憶される対応表を参照してコストの修正を実行するコスト修正手段と、
前記コスト修正手段でコストの修正が実行された場合、移動体の安全ルートを可視的に提示する提示手段と、
を備えたことを特徴とする自動車。
【請求項1】
現在位置を取得する慣性航法装置に接続され、移動体の現在位置を取得するナビゲーション装置であって、
リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別に記憶する車種別記憶手段と、
始点および終点に基づく2点間を設定する設定手段と、
前記設定手段で設定された2点間の経路計算を実行する経路計算手段と、
前記経路計算手段による経路計算を実行する際に、ノードの接続点に関して特別コストの存在有無を判断する判断手段と、
前記判断手段により特別コストの存在が確認された場合、前記車種別記憶手段に記憶される対応表を参照してコストの修正を実行するコスト修正手段と、
を備えたことを特徴とするナビゲーション装置。
【請求項2】
前記コスト修正手段でコストの修正が実行された場合、移動体の安全ルートを可視的に提示する提示手段をさらに有したことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記ナビゲーション装置にディスプレイが接続されており、前記提示手段は、前記ディスプレイ上に表示態様により提示することを特徴とする請求項2に記載のナビゲーション装置。
【請求項4】
前記ナビゲーション装置にスピーカが接続されており、前記提示手段は、前記スピーカより音声で提示することを特徴とする請求項2に記載のナビゲーション装置。
【請求項5】
前記ナビゲーション装置に通信手段が接続されており、前記通信手段を用いて前記対応表を更新する更新手段をさらに有したことを特徴とする請求項1から4のいずれか1つに記載のナビゲーション装置。
【請求項6】
前記ナビゲーション装置に操作手段が接続されており、前記操作手段を用いて前記対応表を更新する手動更新手段をさらに備えたことを特徴とする請求項1から5のいずれか1つに記載のナビゲーション装置。
【請求項7】
現在位置を取得する慣性航法装置に接続され、移動体の現在位置を取得するナビゲーション方法であって、
始点および終点に基づく2点間を設定する第1ステップと、
前記第1ステップで設定された2点間の経路計算を実行する第2ステップと、
前記第2ステップによる経路計算を実行する際に、ノードの接続点に関して特別コストの存在有無を判断する第3ステップと、
リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別に第2メモリに記憶しており、前記第3ステップにより特別コストの存在が確認された場合、前記メモリに記憶される対応表を参照してコストの修正を実行する第4ステップと、
を含んだことを特徴とするナビゲーション方法。
【請求項8】
現在位置を取得する慣性航法装置に接続され、移動体の現在位置を取得する処理をコンピュータにより実行可能なナビゲーションプログラムであって、
前記コンピュータに、
始点および終点に基づく2点間を設定する第1ステップと、
前記第1ステップで設定された2点間の経路計算を実行する第2ステップと、
前記第2ステップによる経路計算を実行する際に、ノードの接続点に関して特別コストの存在有無を判断する第3ステップと、
リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別にメモリに記憶しており、前記第3ステップにより特別コストの存在が確認された場合、前記メモリに記憶される対応表を参照してコストの修正を実行する第4ステップと、
を含んだことを特徴とするナビゲーション方法。
【請求項9】
自動車であって、
ディスプレイと、
慣性航法装置を用いて、少なくとも現在位置および進行情報を検出する位置検出ユニットと、
ナビゲーション装置と、
を備え、
前記ナビゲーション装置は、
リンク間コストとして、少なくとも、入出路の接続角度、入出路の道路幅員、入出力における壁、および、溝等の有無を分類として、各分類に対してコストを対応させた対応表を車種別に記憶する車種別記憶手段と、
始点および終点に基づく2点間を設定する設定手段と、
前記設定手段で設定された2点間の経路計算を実行する経路計算手段と、
前記経路計算手段による経路計算を実行する際に、ノードの接続点に関して特別コストの存在有無を判断する判断手段と、
前記判断手段により特別コストの存在が確認された場合、前記車種別記憶手段に記憶される対応表を参照してコストの修正を実行するコスト修正手段と、
前記コスト修正手段でコストの修正が実行された場合、移動体の安全ルートを可視的に提示する提示手段と、
を備えたことを特徴とする自動車。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−203160(P2008−203160A)
【公開日】平成20年9月4日(2008.9.4)
【国際特許分類】
【出願番号】特願2007−41518(P2007−41518)
【出願日】平成19年2月21日(2007.2.21)
【出願人】(507052430)キャンバスマップル株式会社 (77)
【Fターム(参考)】
【公開日】平成20年9月4日(2008.9.4)
【国際特許分類】
【出願日】平成19年2月21日(2007.2.21)
【出願人】(507052430)キャンバスマップル株式会社 (77)
【Fターム(参考)】
[ Back to top ]