
ナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラム
【課題】精度の高い地図データに基づいて最適な経路案内を行うことができるナビゲーション装置を提供する。
【解決手段】道路データを記憶する地図データ記憶部と、走行軌跡の道路データを生成する走行軌跡データ生成部と、記憶された道路データと生成した道路データとを比較して、地図データ記憶部に追加すべきか否かを判定する追加判定部と、追加すべきと判定した場合、走行軌跡の道路データに応じた最新の写真データを取得する写真データ取得部と、写真データから道路データを抽出する道路データ抽出部と、抽出した道路データと追加すべきと判定した道路データとを比較して、地図データ記憶部を更新すべきか否かを判定する更新判定部と、更新判定部が更新すべきと判定した場合、地図データ記憶部を更新する地図データ更新部と、地図データ更新部が更新した地図データに基づいて、経路案内を行う経路案内部とを備える。
【解決手段】道路データを記憶する地図データ記憶部と、走行軌跡の道路データを生成する走行軌跡データ生成部と、記憶された道路データと生成した道路データとを比較して、地図データ記憶部に追加すべきか否かを判定する追加判定部と、追加すべきと判定した場合、走行軌跡の道路データに応じた最新の写真データを取得する写真データ取得部と、写真データから道路データを抽出する道路データ抽出部と、抽出した道路データと追加すべきと判定した道路データとを比較して、地図データ記憶部を更新すべきか否かを判定する更新判定部と、更新判定部が更新すべきと判定した場合、地図データ記憶部を更新する地図データ更新部と、地図データ更新部が更新した地図データに基づいて、経路案内を行う経路案内部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムに関し、より特定的には、精度の高い地図データに基づいて最適な経路案内を行うことができるナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムに関する。
【背景技術】
【0002】
従来、ある所定の回数同じノード間を走行した場合において、複数ある道路の内全く通行しない道路が存在する場合に、何時も通行する道路以外の道路のデータを削除するナビゲーション装置が提案されている(例えば、特許文献1参照)。
【特許文献1】特開2003−130656号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来の技術では、何時も通行しないからといって、存在しない道路のデータとして削除することは、地図データの精度の高さに欠けるため、最適な経路案内を行うことができない。
【0004】
そこで、本発明は上記問題に鑑みてなされた。すなわち、精度の高い地図データに基づいて最適な経路案内を行うことができるナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムを提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の第1の局面は、精度の高い地図データに基づいて最適な経路案内を行うナビゲーション装置に向けられている。本発明は、道路データを含む地図データを記憶する地図データ記憶部と、車両の現在位置を計測する測位部と、測位部が計測した車両の現在位置に基づいて、走行軌跡の道路データを生成する走行軌跡データ生成部と、地図データ記憶部に記憶された道路データと走行軌跡データ生成部が生成した道路データとを比較して、走行軌跡データ生成部が生成した道路データを地図データ記憶部の道路データに追加すべきか否かを判定する追加判定部と、追加判定部が追加すべきと判定した場合、走行軌跡データ生成部が生成した走行軌跡の道路データに応じた最新の航空写真データ、又は衛星写真データを取得する写真データ取得部と、写真データ取得部が取得した航空写真データ、又は衛星写真データから道路データを抽出する道路データ抽出部と、道路データ抽出部が抽出した道路データと追加判定部が追加すべきと判定した道路データとを比較して、追加判定部が追加すべきと判定した道路データによって地図データ記憶部の道路データを更新すべきか否かを判定する更新判定部と、更新判定部が更新すべきと判定した場合、地図データ記憶部の道路データを更新する地図データ更新部と、地図データ更新部が更新した地図データに基づいて、経路案内を行う経路案内部とを備える。
【0006】
また、追加判定部は、地図データ記憶部に記憶された道路データと走行軌跡データ生成部が生成した道路データとの不一致の度合いを参照して、追加すべき道路データが新たに開通した道路の道路データか従来の道路を改修した道路の道路データかを判定することが好ましい。
【0007】
また、追加判定部が追加すべき道路データが新たに開通した道路の道路データであると判定し、更新判定部が更新すべきと判定した場合、地図データ更新部は、地図データ記憶部の道路データに、新たに開通した道路の道路データを追加する更新を行うことが好ましい。
【0008】
また、追加判定部が追加すべき道路データが従来の道路を改修した道路の道路データであると判定し、更新判定部が更新すべきと判定した場合、地図データ更新部は、地図データ記憶部の従来の道路の道路データを削除し、従来の道路を改修した道路の道路データを追加する更新を行うことが好ましい。
【0009】
また、更新判定部は、道路データ抽出部が抽出した道路データのリンクデータと追加判定部が追加すべきと判定した道路データのリンクデータとの一致率を算出し、算出された一致率が所定の値よりも大きい場合、更新すべきと判定することが好ましい。
【0010】
また、経路案内部は、地図データ更新部が更新した地図データの表す地図によって、経路案内を行うことが好ましい。
【0011】
また、経路案内部は、写真データ取得部が取得した航空写真データ、又は衛星写真データに、地図データ更新部が更新した地図データを重畳した地図データの表す地図によって、経路案内を行うことが好ましい。
【0012】
また、写真データ取得部は、走行軌跡データ生成部が生成した走行軌跡の道路データに応じた最新の基準範囲の航空写真データ、又は衛星写真データを取得することが好ましい。
【0013】
本発明の第2の局面は、精度の高い地図データに基づいて経路案内するナビゲーション方法に向けられている。本発明は、車両の現在位置を計測する測位ステップと、測位ステップで計測した車両の現在位置に基づいて、走行軌跡の道路データを生成する走行軌跡データ生成ステップと、地図データ記憶部に記憶された道路データと前記走行軌跡データ生成ステップで生成した道路データとを比較して、走行軌跡データ生成ステップで生成した道路データを当該地図データ記憶部の道路データに追加すべきか否かを判定する追加判定ステップと、追加判定ステップで追加すべきと判定された場合、走行軌跡データ生成ステップで生成した走行軌跡の道路データに応じた最新の航空写真データ、又は衛星写真データを取得する写真データ取得ステップと、写真データ取得ステップで取得した航空写真データ、又は衛星写真データから道路データを抽出する道路データ抽出ステップと、道路データ抽出ステップで抽出した道路データと追加判定ステップで追加すべきと判定された道路データとを比較して、追加判定ステップで追加すべきと判定された道路データによって地図データ記憶部の道路データを更新すべきか否かを判定する更新判定ステップと、更新判定ステップで更新すべきと判定された場合、地図データ記憶部の道路データを更新する地図データ更新ステップと、地図データ更新ステップで更新した地図データに基づいて、経路案内を行う経路案内ステップとを備える。
【0014】
本発明の第3の局面は、精度の高い地図データに基づいて経路案内するナビゲーション装置のコンピュータで実行されるナビゲーションプログラムに向けられている。本発明は、コンピュータに、車両の現在位置を計測する測位ステップと、測位ステップで計測した車両の現在位置に基づいて、走行軌跡の道路データを生成する走行軌跡データ生成ステップと、地図データ記憶部に記憶された道路データと走行軌跡データ生成ステップで生成した道路データとを比較して、走行軌跡データ生成ステップで生成した道路データを当該地図データ記憶部の道路データに追加すべきか否かを判定する追加判定ステップと、追加判定ステップで追加すべきと判定された場合、走行軌跡データ生成ステップで生成した走行軌跡の道路データに応じた最新の航空写真データ、又は衛星写真データを取得する写真データ取得ステップと、写真データ取得ステップで取得した航空写真データ、又は衛星写真データから道路データを抽出する道路データ抽出ステップと、道路データ抽出ステップで抽出した道路データと追加判定ステップで追加すべきと判定された道路データとを比較して、追加判定ステップで追加すべきと判定された道路データによって地図データ記憶部の道路データを更新すべきか否かを判定する更新判定ステップと、更新判定ステップで更新すべきと判定された場合、地図データ記憶部の道路データを更新する地図データ更新ステップと、地図データ更新ステップで更新した地図データに基づいて、経路案内を行う経路案内ステップとを実行させる。
【発明の効果】
【0015】
以上説明したように、本発明の各局面によれば、精度の高い地図データに基づいて最適な経路案内を行うことができるナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムを提供することができる。
【発明を実施するための最良の形態】
【0016】
(実施の形態)
以下、本発明の実施の形態に係るナビゲーション装置について、図面に従って詳細に説明する。
【0017】
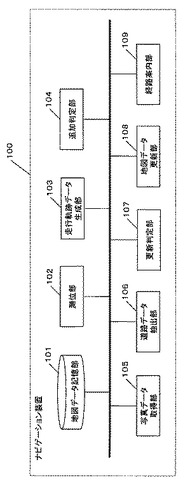
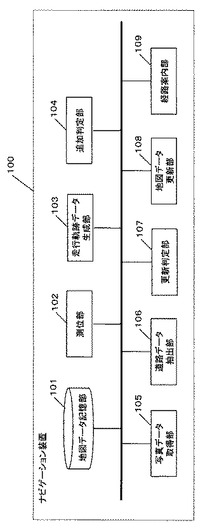
図1は、本発明の実施の形態に係るナビゲーション装置100の全体構成を示すブロック図である。図1において、ナビゲーション装置100は、地図データ記憶部101、測位部102、走行軌跡データ生成部103、追加判定部104、写真データ取得部105、道路データ抽出部106、更新判定部107、地図データ更新部108、及び経路案内部109を備える。
【0018】
地図データ記憶部101は、道路データ、交差点データ、シンボルデータ等の地図データが記憶される、例えば、HDD、DVD、又はフラッシュメモリである。
【0019】
測位部102は、GPS(Global Positioning System)受信機、ジャイロセンサ、及び速度センサから構成される。GPS受信機は、米国が管理するGPS衛星から送られる信号を4つ以上の衛星から受信して、その距離を求めることで、地球上での絶対位置、速度、方位等を算出する。ジャイロセンサは、物体の角速度を検出する。ナビゲーション装置では、コリオリの力を利用した振動ジャイロが広く用いられている。速度センサには車速パルスが用いられる。車速パルスは、タイヤの回転を検出するためのもので、ABS(Anti Lock Brake System)等の目的で車両に広く採用されており、ナビゲーション装置では出力されるパルスに一定の係数を掛けて速度(距離)に変換して利用する。自動車メーカーや車種によりパルスが出力される単位が異なる。更に、タイヤ径や空気圧によっても微妙に係数が異なるため、GPS受信機等の出力結果を用いて係数は修正する。GPS受信機は、地球上で絶対位置を特定することができるが、衛星からの伝播距離を測定するという測位原理から、受信環境の影響を大きく受ける。例えば、高層ビル街では衛星からの信号がビルに反射する影響を受けるため、大きく位置がずれてしまう可能性がある。そもそも、トンネルなどでは衛星からの信号を受信できないため、位置を算出することができない。一方ジャイロセンサや速度センサは、車両の相対的な動きを検出するセンサであり、外部環境の影響はほとんど受けない。従って、相対的な動きを積分して初期値に加えることにより、絶対位置を求めることができる。短時間であれば精度よい結果が期待されるが、角速度や速度を積分して位置として算出する必要があるため、誤差も積分され蓄積してしまう。そのため、ジャイロセンサや速度センサの出力を長時間使用することができない。測位部102においては、これらGPS受信機、ジャイロセンサ、及び速度センサの特徴を生かして、総合的に車両の現在位置を算出する。
【0020】
走行軌跡データ生成部103は、測位部102が順次取得した車両の現在位置を記憶し、順次記憶した車両の現在位置の表す走行履歴に基づいて、走行軌跡の道路データを生成する。
【0021】
追加判定部104は、走行軌跡データ生成部103が生成した道路データと地図データ記憶部101に記憶された道路データとを比較する。この比較の結果、それらの不一致率が所定値よりも大きいか否かを判定することによって、走行軌跡データ生成部103が生成した道路データを地図データ記憶部101の道路データに追加すべきか否かを判定する。このとき、不一致率が所定値よりも大きい場合、追加すべき道路データと判定する。
【0022】
写真データ取得部105は、追加判定部104が追加すると判定した走行軌跡データに対応する最新の航空写真、又は衛星写真データを取得する。写真データ取得部105は、例えば、無線LANやDSRC等の無線方式によって最新の航空写真、又は衛星写真データを取得してもよいし、DVDやメモリカード等の記憶媒体から最新の航空写真、又は衛星写真データを取得してもよい。なお、本実施の形態では、航空写真データを取得するものとして説明する。
【0023】
道路データ抽出部106は、写真データ取得部105が取得した航空写真データから道路データを抽出する。
【0024】
更新判定部107は、追加判定部104が追加すると判定した追加すべき道路データと道路データ抽出部106が抽出した道路データとを比較する。この比較の結果、一致率が所定値よりも大きいか否かを判定し、追加判定部104が追加すべきと判定した道路データによって地図データ記憶部101の道路データを更新すべきか否かを判定する。このとき、一致率が所定値よりも大きい場合、地図データ記憶部101の道路データを更新すべきと判定する。
【0025】
地図データ更新部108は、更新判定部107が更新すべきと判定した場合、追加判定部104が追加すべきと判定した道路データによって地図データ記憶部101の道路データを更新する。
【0026】
経路案内部109は、地図データ更新部108が更新した精度の高い地図データに基づいて、最適な経路案内を行う。
【0027】
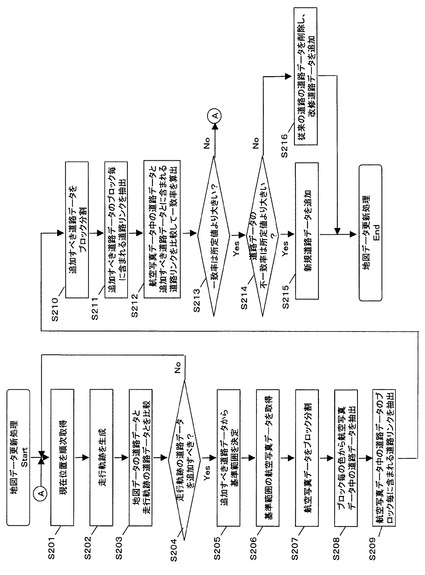
以下、経路案内部109の経路案内にない道路に車両が進入した場合のナビゲーション装置100の地図データ更新処理の動作について、図2に従って説明する。
【0028】
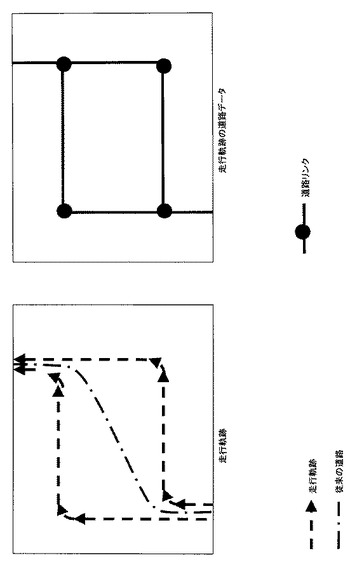
測位部102は、車両の現在位置を順次取得する(ステップS201)。次に、走行軌跡データ生成部103は、測位部102が順次取得した車両の現在位置が表す走行履歴に基づいて、図3に示すように、走行軌跡の道路データを生成する(ステップS202)。
【0029】
次に、追加判定部104は、走行軌跡データ生成部103が生成した道路データと地図データ記憶部101に記憶された道路データとを比較する(ステップS203)。追加判定部104は、この比較の結果、それらの不一致率が所定値よりも大きいか否かを判定することによって、走行軌跡データ生成部103が生成した道路データを地図データ記憶部101の道路データに追加すべきか否かを判定する(ステップS204)。
【0030】
ステップS204において、追加すべきでないと判定された場合、再度ステップS201に処理が戻り、測位部102は車両の現在位置を順次取得する。一方、ステップS204において、追加すべきと判定された場合、写真データ取得部105は、追加すべき道路データから基準範囲を決定する(ステップS205)。
【0031】
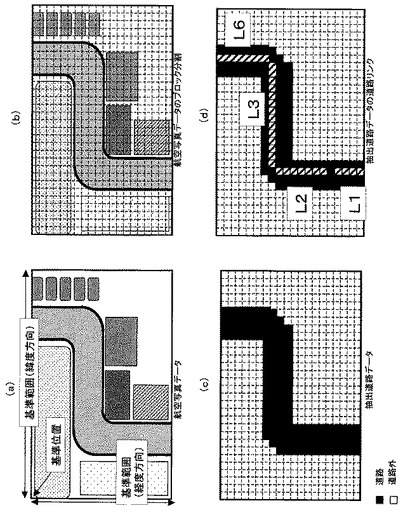
次に、写真データ取得部105は、図4(a)に示すように、決定した基準範囲の航空写真データを取得する(ステップS206)。次に、更新判定部107は、図4(b)に示すように、写真データ取得部105が取得した基準範囲の航空写真データをブロックに分割する(ステップS207)。
【0032】
次に、更新判定部107は、図4(c)に示すように、ブロックに分割した基準範囲の航空写真データをブロック毎に色判別し、道路データを抽出する(ステップS208)。次に、更新判定部107は、図4(d)に示すように、基準範囲の航空写真データ中の道路データのブロック毎に含まれる道路リンクを抽出する(ステップS209)。このとき抽出される道路リンクは、L1、L2、L3、及びL6である。
【0033】
更に、更新判定部107は、図5(b)に示すように、図5(a)に示す追加判定部104が追加すべきと判定した基準範囲の道路データをブロックに分割する(ステップS210)。
【0034】
次に、更新判定部107は、図5(c)に示すように、基準範囲の追加すべき道路データのブロック毎に含まれる道路リンクを抽出する(ステップS211)。このとき抽出される道路リンクは、L1、L2、L3、L4、L5、及びL6である。
【0035】
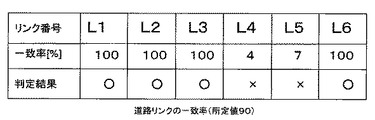
次に、更新判定部107は、基準範囲の航空写真中の道路データに含まれる道路リンクと基準範囲の追加すべき道路データに含まれる道路リンクを比較して、一致率を算出する(ステップS212)。このとき、一致率は、図6の例では、リンクL1が100、リンクL2が100、リンクL3が100、リンクL4が4、リンクL5が7、リンクL6が100となっており、一致率の所定値が90である。
【0036】
次に、更新判定部107は、一致率が所定値よりも大きいか否かを判定することによって、追加判定部104が追加すべきと判定した道路データによって地図データ記憶部101の道路データを更新すべきか否かを判定する(ステップS213)。
【0037】
ステップS213において、一致率が所定値よりも大きいと判定された場合、更新判定部107は、追加判定部104が追加すべきと判定した道路データによって地図データ記憶部101の道路データを更新すべきと判定する。図6の例では、一致率が所定値90よりも大きいリンクL1、リンクL2、リンクL3、及びリンクL6が更新すべき道路の道路データと判定される。
【0038】
一方、ステップS213において、一致率が所定値以下であると判定された場合、更新判定部107は、追加判定部104が追加すべきと判定した道路データによって地図データ記憶部101の道路データを更新すべきでないと判定し、再度ステップS201に処理が戻り、測位部102は車両の現在位置を順次取得する。図6の例では、一致率が所定値90以下のリンクL4、及びリンクL5が更新すべきでない道路の道路データと判定される。
【0039】
次に、更新判定部107は、更新すべき道路の道路データと地図データ記憶部101に記憶された従来の道路の道路データとの不一致率が所定値よりも大きいか否かを判定することによって、新たに開通した道路か、従来の道路を改修した道路かを判定する(ステップS214)。このとき、不一致率が所定値よりも大きい場合、新たに開通した道路と判定し、所定値以下であると判定した場合、従来の道路を改修した道路と判定する。
【0040】
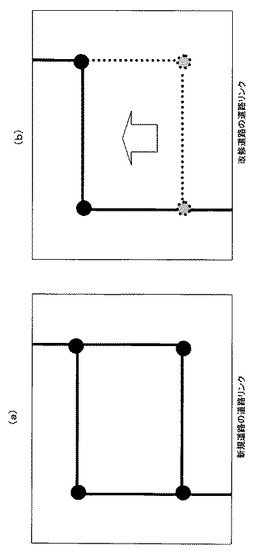
ステップS214において、不一致率が所定値よりも大きいと判定された場合、地図データ更新部108は、図7(a)に示すように、地図データ記憶部101の道路データに、新たに開通した道路の道路データを追加する更新を行う(ステップS215)。
【0041】
一方、ステップS214において、不一致率が所定値以下であると判定された場合、地図データ更新部108は、図7(b)に示すように、地図データ記憶部101の従来の道路の道路データを削除し、従来の道路を改修した道路の道路データを追加する更新を行う(ステップS216)。
【0042】
以下、ナビゲーション装置100の表示処理の動作について、図8に従って説明する。
【0043】
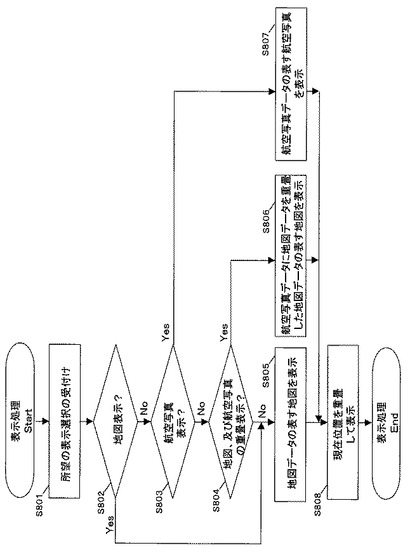
まず、経路案内部109は、ユーザから所望の表示方法の選択入力を受付ける(ステップS801)。
【0044】
ステップS801において、地図表示の選択が受付けられた場合、経路案内部109は、地図データ更新部108が更新した地図データの表す地図を表示すると共に、車両の現在位置を重畳表示して経路案内を行う(ステップS802→S805→S808)。
【0045】
ステップS801において、航空写真表示の選択が受付けられた場合、経路案内部109は、写真データ取得部105が取得した航空写真データの表す航空写真を表示すると共に、車両の現在位置を重畳表示して経路案内を行う(ステップ803→S807→S808)。
【0046】
ステップS801において、地図、及び航空写真の重畳表示の選択が受付けられた場合、経路案内部109は、写真データ取得部105が取得した航空写真データに地図データ更新部108が更新した地図データを重畳した地図データの表す地図を表示すると共に、車両の現在位置を重畳表示して経路案内を行う(ステップS804→S806→S808)。
【0047】
また、本発明は、上述した実施の形態を実現するソフトウェアのプログラム(実施の形態では図に示すフロー図に対応したプログラム)が装置に供給され、その装置のコンピュータが、供給されたプログラムを読出して、実行することによっても達成させる場合を含む。したがって、本発明の機能処理をコンピュータで実現するために、コンピュータにインストールされるプログラム自体も本発明を実現するものである。つまり、本発明は、本発明の機能処理を実現させるためのナビゲーションプログラムも含む。
【0048】
このように、本発明によれば、精度の高い地図データに基づいて最適な経路案内を行うことができるナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムを提供することができる。
【0049】
上記実施の形態で説明した構成は、単に具体例を示すものであり、本願発明の技術的範囲を制限するものではない。本願の効果を奏する範囲において、任意の構成を採用することが可能である。
【産業上の利用可能性】
【0050】
本発明は、精度の高い地図データに基づいて最適な経路案内を行うことができるナビゲーション装置等として有用である。
【図面の簡単な説明】
【0051】
【図1】本発明の実施の形態に係るナビゲーション装置の全体構成を示すブロック図
【図2】本発明の実施の形態に係るナビゲーション装置の地図データ更新処理を示すフロー図
【図3】走行軌跡の一例を示す模式図
【図4】航空写真データから道路データのリンクを抽出する様子を示す模式図
【図5】追加すべき道路データのリンクを抽出する様子を示す模式図
【図6】リンクの一致率と更新判定結果との一例を示す図
【図7】新規道路の追加、及び改修道路の追加の一例を示す模式図
【図8】本発明の実施の形態に係るナビゲーション装置の表示処理を示すフロー図
【符号の説明】
【0052】
100 ナビゲーション装置
101 地図データ記憶部
102 測位部
103 走行軌跡データ生成部
104 追加判定部
105 写真データ取得部
106 道路データ抽出部
107 更新判定部
108 地図データ更新部
109 経路案内部
【技術分野】
【0001】
本発明は、ナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムに関し、より特定的には、精度の高い地図データに基づいて最適な経路案内を行うことができるナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムに関する。
【背景技術】
【0002】
従来、ある所定の回数同じノード間を走行した場合において、複数ある道路の内全く通行しない道路が存在する場合に、何時も通行する道路以外の道路のデータを削除するナビゲーション装置が提案されている(例えば、特許文献1参照)。
【特許文献1】特開2003−130656号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来の技術では、何時も通行しないからといって、存在しない道路のデータとして削除することは、地図データの精度の高さに欠けるため、最適な経路案内を行うことができない。
【0004】
そこで、本発明は上記問題に鑑みてなされた。すなわち、精度の高い地図データに基づいて最適な経路案内を行うことができるナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムを提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の第1の局面は、精度の高い地図データに基づいて最適な経路案内を行うナビゲーション装置に向けられている。本発明は、道路データを含む地図データを記憶する地図データ記憶部と、車両の現在位置を計測する測位部と、測位部が計測した車両の現在位置に基づいて、走行軌跡の道路データを生成する走行軌跡データ生成部と、地図データ記憶部に記憶された道路データと走行軌跡データ生成部が生成した道路データとを比較して、走行軌跡データ生成部が生成した道路データを地図データ記憶部の道路データに追加すべきか否かを判定する追加判定部と、追加判定部が追加すべきと判定した場合、走行軌跡データ生成部が生成した走行軌跡の道路データに応じた最新の航空写真データ、又は衛星写真データを取得する写真データ取得部と、写真データ取得部が取得した航空写真データ、又は衛星写真データから道路データを抽出する道路データ抽出部と、道路データ抽出部が抽出した道路データと追加判定部が追加すべきと判定した道路データとを比較して、追加判定部が追加すべきと判定した道路データによって地図データ記憶部の道路データを更新すべきか否かを判定する更新判定部と、更新判定部が更新すべきと判定した場合、地図データ記憶部の道路データを更新する地図データ更新部と、地図データ更新部が更新した地図データに基づいて、経路案内を行う経路案内部とを備える。
【0006】
また、追加判定部は、地図データ記憶部に記憶された道路データと走行軌跡データ生成部が生成した道路データとの不一致の度合いを参照して、追加すべき道路データが新たに開通した道路の道路データか従来の道路を改修した道路の道路データかを判定することが好ましい。
【0007】
また、追加判定部が追加すべき道路データが新たに開通した道路の道路データであると判定し、更新判定部が更新すべきと判定した場合、地図データ更新部は、地図データ記憶部の道路データに、新たに開通した道路の道路データを追加する更新を行うことが好ましい。
【0008】
また、追加判定部が追加すべき道路データが従来の道路を改修した道路の道路データであると判定し、更新判定部が更新すべきと判定した場合、地図データ更新部は、地図データ記憶部の従来の道路の道路データを削除し、従来の道路を改修した道路の道路データを追加する更新を行うことが好ましい。
【0009】
また、更新判定部は、道路データ抽出部が抽出した道路データのリンクデータと追加判定部が追加すべきと判定した道路データのリンクデータとの一致率を算出し、算出された一致率が所定の値よりも大きい場合、更新すべきと判定することが好ましい。
【0010】
また、経路案内部は、地図データ更新部が更新した地図データの表す地図によって、経路案内を行うことが好ましい。
【0011】
また、経路案内部は、写真データ取得部が取得した航空写真データ、又は衛星写真データに、地図データ更新部が更新した地図データを重畳した地図データの表す地図によって、経路案内を行うことが好ましい。
【0012】
また、写真データ取得部は、走行軌跡データ生成部が生成した走行軌跡の道路データに応じた最新の基準範囲の航空写真データ、又は衛星写真データを取得することが好ましい。
【0013】
本発明の第2の局面は、精度の高い地図データに基づいて経路案内するナビゲーション方法に向けられている。本発明は、車両の現在位置を計測する測位ステップと、測位ステップで計測した車両の現在位置に基づいて、走行軌跡の道路データを生成する走行軌跡データ生成ステップと、地図データ記憶部に記憶された道路データと前記走行軌跡データ生成ステップで生成した道路データとを比較して、走行軌跡データ生成ステップで生成した道路データを当該地図データ記憶部の道路データに追加すべきか否かを判定する追加判定ステップと、追加判定ステップで追加すべきと判定された場合、走行軌跡データ生成ステップで生成した走行軌跡の道路データに応じた最新の航空写真データ、又は衛星写真データを取得する写真データ取得ステップと、写真データ取得ステップで取得した航空写真データ、又は衛星写真データから道路データを抽出する道路データ抽出ステップと、道路データ抽出ステップで抽出した道路データと追加判定ステップで追加すべきと判定された道路データとを比較して、追加判定ステップで追加すべきと判定された道路データによって地図データ記憶部の道路データを更新すべきか否かを判定する更新判定ステップと、更新判定ステップで更新すべきと判定された場合、地図データ記憶部の道路データを更新する地図データ更新ステップと、地図データ更新ステップで更新した地図データに基づいて、経路案内を行う経路案内ステップとを備える。
【0014】
本発明の第3の局面は、精度の高い地図データに基づいて経路案内するナビゲーション装置のコンピュータで実行されるナビゲーションプログラムに向けられている。本発明は、コンピュータに、車両の現在位置を計測する測位ステップと、測位ステップで計測した車両の現在位置に基づいて、走行軌跡の道路データを生成する走行軌跡データ生成ステップと、地図データ記憶部に記憶された道路データと走行軌跡データ生成ステップで生成した道路データとを比較して、走行軌跡データ生成ステップで生成した道路データを当該地図データ記憶部の道路データに追加すべきか否かを判定する追加判定ステップと、追加判定ステップで追加すべきと判定された場合、走行軌跡データ生成ステップで生成した走行軌跡の道路データに応じた最新の航空写真データ、又は衛星写真データを取得する写真データ取得ステップと、写真データ取得ステップで取得した航空写真データ、又は衛星写真データから道路データを抽出する道路データ抽出ステップと、道路データ抽出ステップで抽出した道路データと追加判定ステップで追加すべきと判定された道路データとを比較して、追加判定ステップで追加すべきと判定された道路データによって地図データ記憶部の道路データを更新すべきか否かを判定する更新判定ステップと、更新判定ステップで更新すべきと判定された場合、地図データ記憶部の道路データを更新する地図データ更新ステップと、地図データ更新ステップで更新した地図データに基づいて、経路案内を行う経路案内ステップとを実行させる。
【発明の効果】
【0015】
以上説明したように、本発明の各局面によれば、精度の高い地図データに基づいて最適な経路案内を行うことができるナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムを提供することができる。
【発明を実施するための最良の形態】
【0016】
(実施の形態)
以下、本発明の実施の形態に係るナビゲーション装置について、図面に従って詳細に説明する。
【0017】
図1は、本発明の実施の形態に係るナビゲーション装置100の全体構成を示すブロック図である。図1において、ナビゲーション装置100は、地図データ記憶部101、測位部102、走行軌跡データ生成部103、追加判定部104、写真データ取得部105、道路データ抽出部106、更新判定部107、地図データ更新部108、及び経路案内部109を備える。
【0018】
地図データ記憶部101は、道路データ、交差点データ、シンボルデータ等の地図データが記憶される、例えば、HDD、DVD、又はフラッシュメモリである。
【0019】
測位部102は、GPS(Global Positioning System)受信機、ジャイロセンサ、及び速度センサから構成される。GPS受信機は、米国が管理するGPS衛星から送られる信号を4つ以上の衛星から受信して、その距離を求めることで、地球上での絶対位置、速度、方位等を算出する。ジャイロセンサは、物体の角速度を検出する。ナビゲーション装置では、コリオリの力を利用した振動ジャイロが広く用いられている。速度センサには車速パルスが用いられる。車速パルスは、タイヤの回転を検出するためのもので、ABS(Anti Lock Brake System)等の目的で車両に広く採用されており、ナビゲーション装置では出力されるパルスに一定の係数を掛けて速度(距離)に変換して利用する。自動車メーカーや車種によりパルスが出力される単位が異なる。更に、タイヤ径や空気圧によっても微妙に係数が異なるため、GPS受信機等の出力結果を用いて係数は修正する。GPS受信機は、地球上で絶対位置を特定することができるが、衛星からの伝播距離を測定するという測位原理から、受信環境の影響を大きく受ける。例えば、高層ビル街では衛星からの信号がビルに反射する影響を受けるため、大きく位置がずれてしまう可能性がある。そもそも、トンネルなどでは衛星からの信号を受信できないため、位置を算出することができない。一方ジャイロセンサや速度センサは、車両の相対的な動きを検出するセンサであり、外部環境の影響はほとんど受けない。従って、相対的な動きを積分して初期値に加えることにより、絶対位置を求めることができる。短時間であれば精度よい結果が期待されるが、角速度や速度を積分して位置として算出する必要があるため、誤差も積分され蓄積してしまう。そのため、ジャイロセンサや速度センサの出力を長時間使用することができない。測位部102においては、これらGPS受信機、ジャイロセンサ、及び速度センサの特徴を生かして、総合的に車両の現在位置を算出する。
【0020】
走行軌跡データ生成部103は、測位部102が順次取得した車両の現在位置を記憶し、順次記憶した車両の現在位置の表す走行履歴に基づいて、走行軌跡の道路データを生成する。
【0021】
追加判定部104は、走行軌跡データ生成部103が生成した道路データと地図データ記憶部101に記憶された道路データとを比較する。この比較の結果、それらの不一致率が所定値よりも大きいか否かを判定することによって、走行軌跡データ生成部103が生成した道路データを地図データ記憶部101の道路データに追加すべきか否かを判定する。このとき、不一致率が所定値よりも大きい場合、追加すべき道路データと判定する。
【0022】
写真データ取得部105は、追加判定部104が追加すると判定した走行軌跡データに対応する最新の航空写真、又は衛星写真データを取得する。写真データ取得部105は、例えば、無線LANやDSRC等の無線方式によって最新の航空写真、又は衛星写真データを取得してもよいし、DVDやメモリカード等の記憶媒体から最新の航空写真、又は衛星写真データを取得してもよい。なお、本実施の形態では、航空写真データを取得するものとして説明する。
【0023】
道路データ抽出部106は、写真データ取得部105が取得した航空写真データから道路データを抽出する。
【0024】
更新判定部107は、追加判定部104が追加すると判定した追加すべき道路データと道路データ抽出部106が抽出した道路データとを比較する。この比較の結果、一致率が所定値よりも大きいか否かを判定し、追加判定部104が追加すべきと判定した道路データによって地図データ記憶部101の道路データを更新すべきか否かを判定する。このとき、一致率が所定値よりも大きい場合、地図データ記憶部101の道路データを更新すべきと判定する。
【0025】
地図データ更新部108は、更新判定部107が更新すべきと判定した場合、追加判定部104が追加すべきと判定した道路データによって地図データ記憶部101の道路データを更新する。
【0026】
経路案内部109は、地図データ更新部108が更新した精度の高い地図データに基づいて、最適な経路案内を行う。
【0027】
以下、経路案内部109の経路案内にない道路に車両が進入した場合のナビゲーション装置100の地図データ更新処理の動作について、図2に従って説明する。
【0028】
測位部102は、車両の現在位置を順次取得する(ステップS201)。次に、走行軌跡データ生成部103は、測位部102が順次取得した車両の現在位置が表す走行履歴に基づいて、図3に示すように、走行軌跡の道路データを生成する(ステップS202)。
【0029】
次に、追加判定部104は、走行軌跡データ生成部103が生成した道路データと地図データ記憶部101に記憶された道路データとを比較する(ステップS203)。追加判定部104は、この比較の結果、それらの不一致率が所定値よりも大きいか否かを判定することによって、走行軌跡データ生成部103が生成した道路データを地図データ記憶部101の道路データに追加すべきか否かを判定する(ステップS204)。
【0030】
ステップS204において、追加すべきでないと判定された場合、再度ステップS201に処理が戻り、測位部102は車両の現在位置を順次取得する。一方、ステップS204において、追加すべきと判定された場合、写真データ取得部105は、追加すべき道路データから基準範囲を決定する(ステップS205)。
【0031】
次に、写真データ取得部105は、図4(a)に示すように、決定した基準範囲の航空写真データを取得する(ステップS206)。次に、更新判定部107は、図4(b)に示すように、写真データ取得部105が取得した基準範囲の航空写真データをブロックに分割する(ステップS207)。
【0032】
次に、更新判定部107は、図4(c)に示すように、ブロックに分割した基準範囲の航空写真データをブロック毎に色判別し、道路データを抽出する(ステップS208)。次に、更新判定部107は、図4(d)に示すように、基準範囲の航空写真データ中の道路データのブロック毎に含まれる道路リンクを抽出する(ステップS209)。このとき抽出される道路リンクは、L1、L2、L3、及びL6である。
【0033】
更に、更新判定部107は、図5(b)に示すように、図5(a)に示す追加判定部104が追加すべきと判定した基準範囲の道路データをブロックに分割する(ステップS210)。
【0034】
次に、更新判定部107は、図5(c)に示すように、基準範囲の追加すべき道路データのブロック毎に含まれる道路リンクを抽出する(ステップS211)。このとき抽出される道路リンクは、L1、L2、L3、L4、L5、及びL6である。
【0035】
次に、更新判定部107は、基準範囲の航空写真中の道路データに含まれる道路リンクと基準範囲の追加すべき道路データに含まれる道路リンクを比較して、一致率を算出する(ステップS212)。このとき、一致率は、図6の例では、リンクL1が100、リンクL2が100、リンクL3が100、リンクL4が4、リンクL5が7、リンクL6が100となっており、一致率の所定値が90である。
【0036】
次に、更新判定部107は、一致率が所定値よりも大きいか否かを判定することによって、追加判定部104が追加すべきと判定した道路データによって地図データ記憶部101の道路データを更新すべきか否かを判定する(ステップS213)。
【0037】
ステップS213において、一致率が所定値よりも大きいと判定された場合、更新判定部107は、追加判定部104が追加すべきと判定した道路データによって地図データ記憶部101の道路データを更新すべきと判定する。図6の例では、一致率が所定値90よりも大きいリンクL1、リンクL2、リンクL3、及びリンクL6が更新すべき道路の道路データと判定される。
【0038】
一方、ステップS213において、一致率が所定値以下であると判定された場合、更新判定部107は、追加判定部104が追加すべきと判定した道路データによって地図データ記憶部101の道路データを更新すべきでないと判定し、再度ステップS201に処理が戻り、測位部102は車両の現在位置を順次取得する。図6の例では、一致率が所定値90以下のリンクL4、及びリンクL5が更新すべきでない道路の道路データと判定される。
【0039】
次に、更新判定部107は、更新すべき道路の道路データと地図データ記憶部101に記憶された従来の道路の道路データとの不一致率が所定値よりも大きいか否かを判定することによって、新たに開通した道路か、従来の道路を改修した道路かを判定する(ステップS214)。このとき、不一致率が所定値よりも大きい場合、新たに開通した道路と判定し、所定値以下であると判定した場合、従来の道路を改修した道路と判定する。
【0040】
ステップS214において、不一致率が所定値よりも大きいと判定された場合、地図データ更新部108は、図7(a)に示すように、地図データ記憶部101の道路データに、新たに開通した道路の道路データを追加する更新を行う(ステップS215)。
【0041】
一方、ステップS214において、不一致率が所定値以下であると判定された場合、地図データ更新部108は、図7(b)に示すように、地図データ記憶部101の従来の道路の道路データを削除し、従来の道路を改修した道路の道路データを追加する更新を行う(ステップS216)。
【0042】
以下、ナビゲーション装置100の表示処理の動作について、図8に従って説明する。
【0043】
まず、経路案内部109は、ユーザから所望の表示方法の選択入力を受付ける(ステップS801)。
【0044】
ステップS801において、地図表示の選択が受付けられた場合、経路案内部109は、地図データ更新部108が更新した地図データの表す地図を表示すると共に、車両の現在位置を重畳表示して経路案内を行う(ステップS802→S805→S808)。
【0045】
ステップS801において、航空写真表示の選択が受付けられた場合、経路案内部109は、写真データ取得部105が取得した航空写真データの表す航空写真を表示すると共に、車両の現在位置を重畳表示して経路案内を行う(ステップ803→S807→S808)。
【0046】
ステップS801において、地図、及び航空写真の重畳表示の選択が受付けられた場合、経路案内部109は、写真データ取得部105が取得した航空写真データに地図データ更新部108が更新した地図データを重畳した地図データの表す地図を表示すると共に、車両の現在位置を重畳表示して経路案内を行う(ステップS804→S806→S808)。
【0047】
また、本発明は、上述した実施の形態を実現するソフトウェアのプログラム(実施の形態では図に示すフロー図に対応したプログラム)が装置に供給され、その装置のコンピュータが、供給されたプログラムを読出して、実行することによっても達成させる場合を含む。したがって、本発明の機能処理をコンピュータで実現するために、コンピュータにインストールされるプログラム自体も本発明を実現するものである。つまり、本発明は、本発明の機能処理を実現させるためのナビゲーションプログラムも含む。
【0048】
このように、本発明によれば、精度の高い地図データに基づいて最適な経路案内を行うことができるナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムを提供することができる。
【0049】
上記実施の形態で説明した構成は、単に具体例を示すものであり、本願発明の技術的範囲を制限するものではない。本願の効果を奏する範囲において、任意の構成を採用することが可能である。
【産業上の利用可能性】
【0050】
本発明は、精度の高い地図データに基づいて最適な経路案内を行うことができるナビゲーション装置等として有用である。
【図面の簡単な説明】
【0051】
【図1】本発明の実施の形態に係るナビゲーション装置の全体構成を示すブロック図
【図2】本発明の実施の形態に係るナビゲーション装置の地図データ更新処理を示すフロー図
【図3】走行軌跡の一例を示す模式図
【図4】航空写真データから道路データのリンクを抽出する様子を示す模式図
【図5】追加すべき道路データのリンクを抽出する様子を示す模式図
【図6】リンクの一致率と更新判定結果との一例を示す図
【図7】新規道路の追加、及び改修道路の追加の一例を示す模式図
【図8】本発明の実施の形態に係るナビゲーション装置の表示処理を示すフロー図
【符号の説明】
【0052】
100 ナビゲーション装置
101 地図データ記憶部
102 測位部
103 走行軌跡データ生成部
104 追加判定部
105 写真データ取得部
106 道路データ抽出部
107 更新判定部
108 地図データ更新部
109 経路案内部
【特許請求の範囲】
【請求項1】
精度の高い地図データに基づいて最適な経路案内を行うナビゲーション装置であって、
道路データを含む地図データを記憶する地図データ記憶部と、
車両の現在位置を計測する測位部と、
前記測位部が計測した車両の現在位置に基づいて、走行軌跡の道路データを生成する走行軌跡データ生成部と、
前記地図データ記憶部に記憶された道路データと前記走行軌跡データ生成部が生成した道路データとを比較して、前記走行軌跡データ生成部が生成した道路データを前記地図データ記憶部の道路データに追加すべきか否かを判定する追加判定部と、
前記追加判定部が追加すべきと判定した場合、前記走行軌跡データ生成部が生成した走行軌跡の道路データに応じた最新の航空写真データ、又は衛星写真データを取得する写真データ取得部と、
前記写真データ取得部が取得した航空写真データ、又は衛星写真データから道路データを抽出する道路データ抽出部と、
前記道路データ抽出部が抽出した道路データと前記追加判定部が追加すべきと判定した道路データとを比較して、前記追加判定部が追加すべきと判定した道路データによって前記地図データ記憶部の道路データを更新すべきか否かを判定する更新判定部と、
前記更新判定部が更新すべきと判定した場合、前記地図データ記憶部の道路データを更新する地図データ更新部と、
前記地図データ更新部が更新した地図データに基づいて、経路案内を行う経路案内部とを備える、ナビゲーション装置。
【請求項2】
前記追加判定部は、前記地図データ記憶部に記憶された道路データと前記走行軌跡データ生成部が生成した道路データとの不一致の度合いを参照して、追加すべき道路データが新たに開通した道路の道路データか従来の道路を改修した道路の道路データかを判定することを特徴とする、請求項1に記載のナビゲーション装置。
【請求項3】
前記追加判定部が追加すべき道路データが新たに開通した道路の道路データであると判定し、前記更新判定部が更新すべきと判定した場合、前記地図データ更新部は、前記地図データ記憶部の道路データに、新たに開通した道路の道路データを追加する更新を行うことを特徴とする、請求項2に記載のナビゲーション装置。
【請求項4】
前記追加判定部が追加すべき道路データが従来の道路を改修した道路の道路データであると判定し、前記更新判定部が更新すべきと判定した場合、前記地図データ更新部は、前記地図データ記憶部の従来の道路の道路データを削除し、従来の道路を改修した道路の道路データを追加する更新を行うことを特徴とする、請求項2に記載のナビゲーション装置。
【請求項5】
前記更新判定部は、前記道路データ抽出部が抽出した道路データのリンクデータと前記追加判定部が追加すべきと判定した道路データのリンクデータとの一致率を算出し、算出された一致率が所定の値よりも大きい場合、更新すべきと判定することを特徴とする、請求項1〜4のいずれかに記載のナビゲーション装置。
【請求項6】
前記経路案内部は、前記地図データ更新部が更新した地図データの表す地図によって、経路案内を行うことを特徴とする、請求項1〜5のいずれかに記載のナビゲーション装置。
【請求項7】
前記経路案内部は、前記写真データ取得部が取得した航空写真データ、又は衛星写真データに、前記地図データ更新部が更新した地図データを重畳した地図データの表す地図によって、経路案内を行うことを特徴とする、請求項1〜5のいずれかに記載のナビゲーション装置。
【請求項8】
前記写真データ取得部は、前記走行軌跡データ生成部が生成した走行軌跡の道路データに応じた最新の基準範囲の航空写真データ、又は衛星写真データを取得することを特徴とする、請求項1〜7のいずれかに記載のナビゲーション装置。
【請求項9】
精度の高い地図データに基づいて経路案内するナビゲーション方法であって、
車両の現在位置を計測する測位ステップと、
前記測位ステップで計測した車両の現在位置に基づいて、走行軌跡の道路データを生成する走行軌跡データ生成ステップと、
地図データ記憶部に記憶された道路データと前記走行軌跡データ生成ステップで生成した道路データとを比較して、前記走行軌跡データ生成ステップで生成した道路データを当該地図データ記憶部の道路データに追加すべきか否かを判定する追加判定ステップと、
前記追加判定ステップで追加すべきと判定された場合、前記走行軌跡データ生成ステップで生成した走行軌跡の道路データに応じた最新の航空写真データ、又は衛星写真データを取得する写真データ取得ステップと、
前記写真データ取得ステップで取得した航空写真データ、又は衛星写真データから道路データを抽出する道路データ抽出ステップと、
前記道路データ抽出ステップで抽出した道路データと前記追加判定ステップで追加すべきと判定された道路データとを比較して、前記追加判定ステップで追加すべきと判定された道路データによって前記地図データ記憶部の道路データを更新すべきか否かを判定する更新判定ステップと、
前記更新判定ステップで更新すべきと判定された場合、前記地図データ記憶部の道路データを更新する地図データ更新ステップと、
前記地図データ更新ステップで更新した地図データに基づいて、経路案内を行う経路案内ステップとを備える、ナビゲーション方法。
【請求項10】
精度の高い地図データに基づいて経路案内するナビゲーション装置のコンピュータで実行されるナビゲーションプログラムであって、
前記コンピュータに、
車両の現在位置を計測する測位ステップと、
前記測位ステップで計測した車両の現在位置に基づいて、走行軌跡の道路データを生成する走行軌跡データ生成ステップと、
地図データ記憶部に記憶された道路データと前記走行軌跡データ生成ステップで生成した道路データとを比較して、前記走行軌跡データ生成ステップで生成した道路データを当該地図データ記憶部の道路データに追加すべきか否かを判定する追加判定ステップと、
前記追加判定ステップで追加すべきと判定された場合、前記走行軌跡データ生成ステップで生成した走行軌跡の道路データに応じた最新の航空写真データ、又は衛星写真データを取得する写真データ取得ステップと、
前記写真データ取得ステップで取得した航空写真データ、又は衛星写真データから道路データを抽出する道路データ抽出ステップと、
前記道路データ抽出ステップで抽出した道路データと前記追加判定ステップで追加すべきと判定された道路データとを比較して、前記追加判定ステップで追加すべきと判定された道路データによって前記地図データ記憶部の道路データを更新すべきか否かを判定する更新判定ステップと、
前記更新判定ステップで更新すべきと判定された場合、前記地図データ記憶部の道路データを更新する地図データ更新ステップと、
前記地図データ更新ステップで更新した地図データに基づいて、経路案内を行う経路案内ステップとを実行させる、ナビゲーションプログラム。
【請求項1】
精度の高い地図データに基づいて最適な経路案内を行うナビゲーション装置であって、
道路データを含む地図データを記憶する地図データ記憶部と、
車両の現在位置を計測する測位部と、
前記測位部が計測した車両の現在位置に基づいて、走行軌跡の道路データを生成する走行軌跡データ生成部と、
前記地図データ記憶部に記憶された道路データと前記走行軌跡データ生成部が生成した道路データとを比較して、前記走行軌跡データ生成部が生成した道路データを前記地図データ記憶部の道路データに追加すべきか否かを判定する追加判定部と、
前記追加判定部が追加すべきと判定した場合、前記走行軌跡データ生成部が生成した走行軌跡の道路データに応じた最新の航空写真データ、又は衛星写真データを取得する写真データ取得部と、
前記写真データ取得部が取得した航空写真データ、又は衛星写真データから道路データを抽出する道路データ抽出部と、
前記道路データ抽出部が抽出した道路データと前記追加判定部が追加すべきと判定した道路データとを比較して、前記追加判定部が追加すべきと判定した道路データによって前記地図データ記憶部の道路データを更新すべきか否かを判定する更新判定部と、
前記更新判定部が更新すべきと判定した場合、前記地図データ記憶部の道路データを更新する地図データ更新部と、
前記地図データ更新部が更新した地図データに基づいて、経路案内を行う経路案内部とを備える、ナビゲーション装置。
【請求項2】
前記追加判定部は、前記地図データ記憶部に記憶された道路データと前記走行軌跡データ生成部が生成した道路データとの不一致の度合いを参照して、追加すべき道路データが新たに開通した道路の道路データか従来の道路を改修した道路の道路データかを判定することを特徴とする、請求項1に記載のナビゲーション装置。
【請求項3】
前記追加判定部が追加すべき道路データが新たに開通した道路の道路データであると判定し、前記更新判定部が更新すべきと判定した場合、前記地図データ更新部は、前記地図データ記憶部の道路データに、新たに開通した道路の道路データを追加する更新を行うことを特徴とする、請求項2に記載のナビゲーション装置。
【請求項4】
前記追加判定部が追加すべき道路データが従来の道路を改修した道路の道路データであると判定し、前記更新判定部が更新すべきと判定した場合、前記地図データ更新部は、前記地図データ記憶部の従来の道路の道路データを削除し、従来の道路を改修した道路の道路データを追加する更新を行うことを特徴とする、請求項2に記載のナビゲーション装置。
【請求項5】
前記更新判定部は、前記道路データ抽出部が抽出した道路データのリンクデータと前記追加判定部が追加すべきと判定した道路データのリンクデータとの一致率を算出し、算出された一致率が所定の値よりも大きい場合、更新すべきと判定することを特徴とする、請求項1〜4のいずれかに記載のナビゲーション装置。
【請求項6】
前記経路案内部は、前記地図データ更新部が更新した地図データの表す地図によって、経路案内を行うことを特徴とする、請求項1〜5のいずれかに記載のナビゲーション装置。
【請求項7】
前記経路案内部は、前記写真データ取得部が取得した航空写真データ、又は衛星写真データに、前記地図データ更新部が更新した地図データを重畳した地図データの表す地図によって、経路案内を行うことを特徴とする、請求項1〜5のいずれかに記載のナビゲーション装置。
【請求項8】
前記写真データ取得部は、前記走行軌跡データ生成部が生成した走行軌跡の道路データに応じた最新の基準範囲の航空写真データ、又は衛星写真データを取得することを特徴とする、請求項1〜7のいずれかに記載のナビゲーション装置。
【請求項9】
精度の高い地図データに基づいて経路案内するナビゲーション方法であって、
車両の現在位置を計測する測位ステップと、
前記測位ステップで計測した車両の現在位置に基づいて、走行軌跡の道路データを生成する走行軌跡データ生成ステップと、
地図データ記憶部に記憶された道路データと前記走行軌跡データ生成ステップで生成した道路データとを比較して、前記走行軌跡データ生成ステップで生成した道路データを当該地図データ記憶部の道路データに追加すべきか否かを判定する追加判定ステップと、
前記追加判定ステップで追加すべきと判定された場合、前記走行軌跡データ生成ステップで生成した走行軌跡の道路データに応じた最新の航空写真データ、又は衛星写真データを取得する写真データ取得ステップと、
前記写真データ取得ステップで取得した航空写真データ、又は衛星写真データから道路データを抽出する道路データ抽出ステップと、
前記道路データ抽出ステップで抽出した道路データと前記追加判定ステップで追加すべきと判定された道路データとを比較して、前記追加判定ステップで追加すべきと判定された道路データによって前記地図データ記憶部の道路データを更新すべきか否かを判定する更新判定ステップと、
前記更新判定ステップで更新すべきと判定された場合、前記地図データ記憶部の道路データを更新する地図データ更新ステップと、
前記地図データ更新ステップで更新した地図データに基づいて、経路案内を行う経路案内ステップとを備える、ナビゲーション方法。
【請求項10】
精度の高い地図データに基づいて経路案内するナビゲーション装置のコンピュータで実行されるナビゲーションプログラムであって、
前記コンピュータに、
車両の現在位置を計測する測位ステップと、
前記測位ステップで計測した車両の現在位置に基づいて、走行軌跡の道路データを生成する走行軌跡データ生成ステップと、
地図データ記憶部に記憶された道路データと前記走行軌跡データ生成ステップで生成した道路データとを比較して、前記走行軌跡データ生成ステップで生成した道路データを当該地図データ記憶部の道路データに追加すべきか否かを判定する追加判定ステップと、
前記追加判定ステップで追加すべきと判定された場合、前記走行軌跡データ生成ステップで生成した走行軌跡の道路データに応じた最新の航空写真データ、又は衛星写真データを取得する写真データ取得ステップと、
前記写真データ取得ステップで取得した航空写真データ、又は衛星写真データから道路データを抽出する道路データ抽出ステップと、
前記道路データ抽出ステップで抽出した道路データと前記追加判定ステップで追加すべきと判定された道路データとを比較して、前記追加判定ステップで追加すべきと判定された道路データによって前記地図データ記憶部の道路データを更新すべきか否かを判定する更新判定ステップと、
前記更新判定ステップで更新すべきと判定された場合、前記地図データ記憶部の道路データを更新する地図データ更新ステップと、
前記地図データ更新ステップで更新した地図データに基づいて、経路案内を行う経路案内ステップとを実行させる、ナビゲーションプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2008−241418(P2008−241418A)
【公開日】平成20年10月9日(2008.10.9)
【国際特許分類】
【出願番号】特願2007−81346(P2007−81346)
【出願日】平成19年3月27日(2007.3.27)
【出願人】(000005821)松下電器産業株式会社 (73,050)
【Fターム(参考)】
【公開日】平成20年10月9日(2008.10.9)
【国際特許分類】
【出願日】平成19年3月27日(2007.3.27)
【出願人】(000005821)松下電器産業株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]