
ナビゲーション装置、ナビゲーション方法、及びプログラム
【課題】トンネルの状況を直観的に把握すること。
【解決手段】
自車が走行する経路を含む地図画像を表示するナビゲーション装置において、自車が走行するトンネルの形態を表すトンネル案内画像P1が表示される。この例の場合、入口から出口までのトンネル全体を横から見たときの断面が模式的に描かれている画像を含むトンネル案内画像P1が表示される。
【解決手段】
自車が走行する経路を含む地図画像を表示するナビゲーション装置において、自車が走行するトンネルの形態を表すトンネル案内画像P1が表示される。この例の場合、入口から出口までのトンネル全体を横から見たときの断面が模式的に描かれている画像を含むトンネル案内画像P1が表示される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置、ナビゲーション方法、及びプログラムに関する。
【背景技術】
【0002】
近年、自動車等の移動時に、複数の人工衛星から地上に無線送信される航法電波を受信して現在位置を検出するGPS(global positional system)を利用して自車の位置を表示するナビゲーション装置が広く用いられている。
【0003】
またナビゲーション装置で表示されるナビゲーション画像についても、経路情報を効果的にユーザに提示する工夫が各種提案されている。例えばトンネルを走行する場合ドライバの緊張が高まることから、トンネル走行中に、トンネルの名称や、トンネル出口までの距離を表示する方法が提案されている(特許文献1)。
【0004】
【特許文献1】特開2001−33261号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら特許文献1の発明では、トンネルの名称や出口までの距離が、単に、テキストとして表示されるだけで、トンネルの状況を容易に把握できるものではない。
【0006】
トンネル内ではドライバは、例えば道路勾配を把握しづらく、上り勾配では速度低下しやすく、下り勾配では速度超過になりやすいといった問題がある。
【0007】
そこで、本発明は、このような状況に鑑みてなされたものであり、トンネルの状況を容易に把握することができるようにするものである。
【課題を解決するための手段】
【0008】
本発明のナビゲーション装置は、自車が走行する経路を含む地図画像を表示するナビゲーション装置において、自車が走行するトンネルの形態を表すトンネル案内画像と、トンネルの位置に対応するトンネルの外の様子を表す画像とを表示させる表示制御手段を有することを特徴とする。
【0009】
道路の勾配を検出する勾配検出手段をさらに有し、トンネル案内画像には、トンネルの形態が勾配に応じて描かれているようにすることができる。
【0010】
自車位置を検出する検出手段をさらに有し、表示制御手段は、トンネル案内画像上の、トンネル内の自車位置に応じた位置に、自車のアイコンを表示させることができる。
【0011】
自車がトンネル内を走行しているか否かを判定するトンネル判定手段をさらに有し、表示制御手段は、トンネル案内画像および地上画像がそれぞれ対応して表示される第1のモードと、他の第2のモードの表示モードを有し、トンネル判定手段により自車がトンネル内を走行していると判定された場合、表示モードを第1のモードに設定することができる。
【0012】
判定手段は、自車が所定の距離以上の長さのトンネルを走行している場合、自車がトンネル内を走行していると判定することができる。
【0013】
自車が走行している第1のトンネルの出口から、次の第2のトンネルの入口までの距離が所定の距離以下である場合、自車が第1のトンネルの出口から第2のトンネルの入口までの間を走行している間においても、第1のモードが維持されるようにすることができる。
【0014】
本発明のナビゲーション方法は、自車が走行する経路を含む地図画像を表示するナビゲーション装置のナビゲーション方法において、自車が走行するトンネルの形態を表すトンネル案内画像と、トンネルの位置に対応するトンネルの外の様子を表す画像とを表示させる表示制御ステップを含むことを特徴とする。
【0015】
本発明のプログラムは、自車が走行する経路を含む地図画像を表示する処理をコンピュータに実行させるプログラムにおいて、自車が走行するトンネルの形態を表すトンネル案内画像と、トンネルの位置に対応するトンネルの外の様子を表す画像とを表示させる表示制御ステップを含む処理をコンピュータに実行させることを特徴とする。
【発明の効果】
【0016】
本発明によれば、トンネルの状況を容易に把握することができる。
【発明を実施するための最良の形態】
【0017】
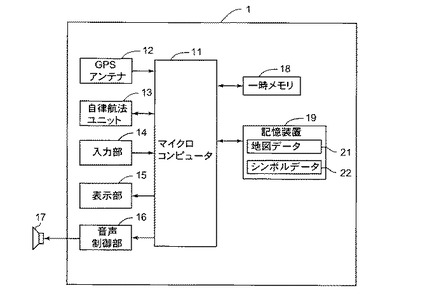
図1は、本発明を適用したナビゲーション装置1の内部構成例を示すブロック図である。この図1において、ナビゲーション装置1は、マイクロコンピュータ11、GPSアンテナ12、自律航法ユニット13、入力部14、表示部15、音声制御部16、スピーカ17、一時メモリ18、記憶装置19等を備えて構成されている。
【0018】
マイクロコンピュータ11は、図示せぬ、メモリ、CPU(Central Processing Unit)、入出力ポートなどを有する。入出力ポートには、GPSアンテナ12、自律航法ユニット13、入力部14、表示部15、音声制御部16、一時メモリ18、及び記憶装置19が接続される。マイクロコンピュータ11のCPUは、メモリや記憶装置19などから図示せぬ制御プログラムを読み込んで実行する。
【0019】
例えばマイクロコンピュータ11は、GPSアンテナ12、自律航法ユニット13、及び入力部14等を介して入力されるデータに基づいて、ナビゲーション装置1が搭載されている車両(以下、自車と称する)の地図上の位置を検出する。そしてマイクロコンピュータ11は、検出した自車位置を含む地図情報を、記憶装置19から検索し、検索した地図情報に対応する地図画像を含むナビゲーション画像を、表示部15に表示させる。
【0020】
またマイクロコンピュータ11は、詳細は後述するが、例えば自車がトンネル内の道路(以下、適宜、トンネルと略称する)上にあるとき、ナビゲーション画像の表示モードを、トンネルの状況を表す画像(以下、トンネル案内画像P1と称する)と、そのトンネルの地上の様子を表す画像(以下、地上画像P2と称する)とが表示されるモード(以下、トンネル案内モードと称する)にし、トンネル内の走行を案内する。
【0021】
なお通常は(即ち、例えば自車がトンネル内を走行していないときは)、マイクロコンピュータ11は、表示モードを、自車が位置する道路を含む一般的な地図画像が表示されるモード(以下、通常案内モードと称する)に設定する。
【0022】
またマイクロコンピュータ11は、ユーザからの要求に応じて、出発地から目的地までの誘導経路を検索する。マイクロコンピュータ11は、通常案内モード及びトンネル案内モードにおいて、ユーザからの要求に応じて、自車の誘導経路に対する走行に従い、例えば曲がるべき交差点に近づいた時に、その交差点の表示を拡大する等の誘導処理を実行する。
【0023】
GPS(Global Positioning System)アンテナ12は、地球低軌道に打ち上げられた複数のGPS衛星から送信されるGPS信号を受信する。GPSアンテナ12は、少なくとも3個のGPS衛星から送信されるGPS信号を受信し、マイクロコンピュータ11に出力する。
【0024】
自律航法ユニット13は、角度センサー、加速度センサー、距離センサー等を備えて構成される。角度センサーは、車の角速度(例えば、単位時間あたりの水平方向への回転角度)を検出して、移動方位の変化量を算出する。加速度センサーは、車の加速度を検出して、自車の前後方向の加速度を算出する。距離センサーは、車輪の回転に応じて出力されるパルス信号を検出して、自車の移動量を算出する。自律航法ユニット13は、これら角速度信号、加速度信号及び車速パルス信号を、マイクロコンピュータ11に出力する。
【0025】
入力部14は、文字キー、数字キー、検索キーの他、ナビゲーションを利用するための各種機能に対応付けられた各種キーを備え、操作されたキーに対する操作信号をマイクロコンピュータ11に出力する。また、入力部14は、カラー液晶ディスプレイ等により構成される表示部15を覆うように設けられたタッチパネルを備えてもよく、電磁誘導式、磁気歪式、感圧式等の座標読み取り原理でタッチ指示された座標を検出し、検出した座標を位置信号としてマイクロコンピュータ11に出力することもできる。あるいは、入力部14は、リモートコントローラ、マイクロフォン等の入力装置を備える構成としてもよい。
【0026】
表示部15は、カラー液晶ディスプレイ等により構成され、入力部14における入力内容や、マイクロコンピュータ11から入力されるナビゲーション用の表示情報を表示する。
【0027】
音声制御部16は、マイクロコンピュータ11から入力された信号に応じた音声信号をスピーカ17から出力させる。
【0028】
一時メモリ18は、RAM、ROM等から構成され、マイクロコンピュータ11によって実行される各種プログラムやこれら各種プログラムにかかるデータ等を一時的に記憶するワークエリアを形成する。
【0029】
記憶装置19は、例えばハードディスクドライバ等により構成され、マイクロコンピュータ11により実行されるナビゲーション装置1の各種アプリケーションを記憶している。記憶装置19はまた、過去に走行した経路、ナビゲーション装置1の動作に関する各種設定内容を記憶している。
【0030】
記憶装置19はまた、自車の現在位置の検出、目的地までの経路探索、及びナビゲーションの表示等に使用する地図データ21、並びに道路、施設、海、及び湖等の各種シンボルデータ22を記憶する。
【0031】
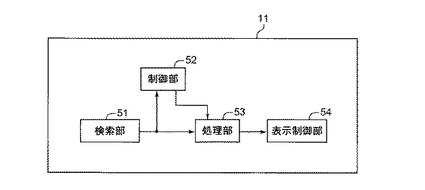
図2は、本発明の実施の形態としてのナビゲーション処理を実行するナビゲーション装置1の機能的構成例を示すブロック図である。この機能は、マイクロコンピュータ11のCPUが、メモリなどから図示せぬ制御プログラムを読み込んで実行することにより実現される。
【0032】
なお、マイクロコンピュータ11が実行する制御プログラムは、ナビゲーション装置1の出荷前に、マイクロコンピュータ11のメモリなどに記憶されたものであっても、ナビゲーション装置1の出荷後に、マイクロコンピュータ11のメモリなどに記憶されたものであってもよい。また、制御プログラムの一部が、ナビゲーション装置1の出荷後に、マイクロコンピュータ11のメモリなどに記憶されたものであってもよい。ナビゲーション装置1の出荷後に、マイクロコンピュータ11のメモリなどに記憶される制御プログラムは、例えばCD−ROMなどのコンピュータ読取可能な記録媒体に記憶されているものをインストールしたものであっても、インターネットなどの伝送媒体を介してダウンロードしたものをインストールしたものであってもよい。
【0033】
検索部51は、GPSアンテナ12により受信されたGPS信号、自律航法ユニット13により検出された角速度信号及び車速パルス信号に基づいて、自車の現在地を検出する。具体的には検索部51は、航法電波に含まれる複数のGPS人工衛星からの電波到着時刻、地球周回の軌道と受信電波の到達時刻とから各GPS人工衛星までの距離を計算し、自車位置を検出する。またトンネルや高架道路下等でGPS人工衛星からの航法電波が届かない場合、検索部51は、自律航法ユニット13からの出力である自車の速度と左右の傾きにより自車位置を検出する。
【0034】
検索部51はまた、自車の速度と加速度信号に基づいて、道路の勾配を検出する。
【0035】
検索部51はまた、ユーザによる入力部14に対する操作に応じて、記憶装置19に記憶されている地図データ21やシンボルデータ22を利用した、例えば自車の現在地からユーザにより指定された目的地までの誘導経路検索を実行する。
【0036】
制御部52は、表示モードを、通常案内モード又はトンネル案内モードに設定し(又は切り換えて)、処理部53を制御して、設定した表示モードでのナビゲーション画像を表示させる。
【0037】
例えば制御部52は、検索部51により検出された自車位置と地図データ21に基づいて、走行中の道路がトンネルであるか否かを判定し、トンネルであると判定した場合、表示モードを、トンネル案内モードに設定する。また走行中の道路がトンネルではなくなったと判定した場合、制御部52は、表示モードを、通常案内モードに設定する。
【0038】
処理部53は、制御部52の制御に従って、設定された表示モードに応じたナビゲーション画像の画像データを生成し、表示制御部54に供給する。
【0039】
表示制御部54は、処理部53から供給された画像データに対応する画像を、表示部15に表示させる。
【0040】
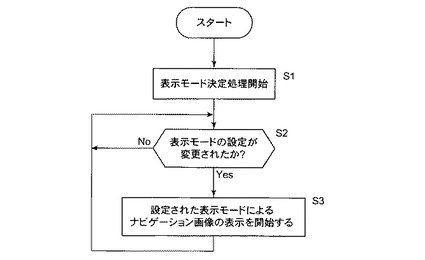
図3は、本発明の実施の形態としてのナビゲーション処理の流れを示すフローチャートである。
【0041】
ステップS1において、マイクロコンピュータ11の制御部52は、表示モードを、通常案内モード又はトンネル案内モードに設定する処理を開始する。具体的には上述したように、制御部52は、検索部51により検出された自車位置と地図データ21に基づいて、走行中の道路がトンネルであるか否かを判定し、トンネルであると判定した場合、表示モードを、トンネル案内モードに設定する。また走行中の道路がトンネルではないと判定した場合、制御部52は、表示モードを、通常案内モードに設定する。
【0042】
ステップS2において、処理部53は、ステップS1の処理により、表示モードの設定が変更されたか否かを判定し、変更されたと判定した場合、ステップS3において、変更された表示モードでのナビゲーション画像の表示を開始する。
【0043】
例えば自車がトンネルから出て、表示モードがトンネル案内モードから通常案内モードに変更された場合、又はナビゲーション装置1の電源が投入され、表示モードが通常案内モードに初期設定された場合、通常案内モードでのナビゲーション画像を表示する処理が開始される。なおこの場合において誘導経路に対する誘導開始が設定されているとき、誘導経路に対する誘導処理が実行され、その誘導処理に応じた画像が表示される。
【0044】
一方、例えば自車がトンネルに入って、表示モードが通常案内モードからトンネル案内モードに変更された場合、トンネル案内モードでのナビゲーション画像を表示する処理が開始される。なおこの場合において誘導経路に対する誘導開始が設定されているとき、誘導経路に対する誘導処理が実行され、その誘導処理に応じた画像が表示させる。
【0045】
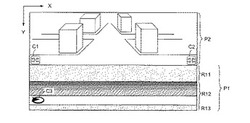
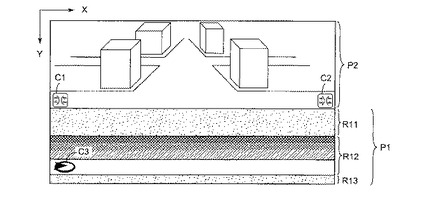
図4は、トンネル案内モードでのナビゲーション画像の表示例を示す図である。この例の場合、入口から出口までのトンネル全体を横から見たときの断面が模式的に描かれている画像を含むトンネル案内画像P1が表示される。図4の例では、トンネル案内画像P1のR11の領域には、地表からトンネルの上側までの地層部分の断面が示され、R12の領域には、トンネル部分の断面が示され、R13の領域には、トンネルの下側の地層部分の断面が示されている。
【0046】
またトンネルの地上の様子を模式的に示す地上画像P2が、トンネル案内画像P1に対応して表示される。例えば、ナビゲーション画像上のX軸上におけるトンネルと建物の位置関係が、実際の位置関係に対応するものとなっている。
【0047】
またこのトンネル案内モードでのナビゲーション画像には、トンネルの入口と出口に対応する位置に、トンネルの入口を表すアイコンC1と、出口を表すアイコンC2が表示される。
【0048】
またこのトンネル案内モードでのトンネル案内画像P1には、自車を表すアイコンC3が、自車の実際のトンネルの位置に応じた位置に表示される。
【0049】
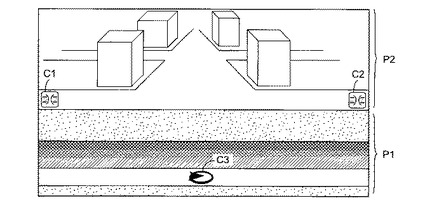
図5は、トンネル案内モードでのナビゲーション画像の他の表示例を示す図である。この例は、自車がトンネル内を走行しているときの表示例である。なお図4は、自車がトンネルに入った直後の表示例である。図5のトンネル案内画像P1の基本的な構成は図4の例の場合と同様であるが、この例の場合、トンネルのほぼ中央まで自車の位置が進み、自車を表すアイコンC3が、トンネル案内画像P1のほぼ中央に表示されている。
【0050】
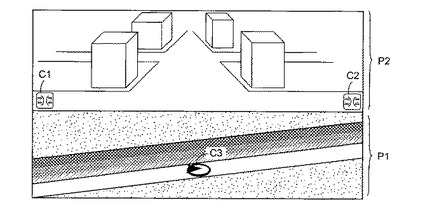
図6は、トンネル案内モードでのナビゲーション画像の他の表示例を示す図である。図6のトンネル案内画像P1の基本的な構成は図4の例の場合と同様であるが、この例の場合、トンネルの断面が、トンネルの実際の勾配に応じた一定の勾配を有して描かれている。
【0051】
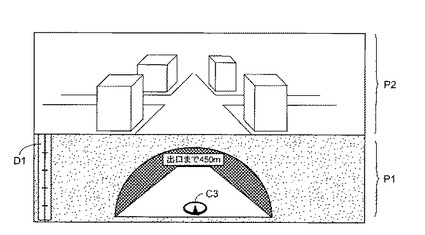
図7は、トンネル案内モードによるナビゲーション画像の他の表示例を示す図である。この例の場合、伸びる方向にトンネルを見たときの断面が描かれている画像を含むトンネル案内画像P1が表示されている。また、トンネル出口までの距離が示されている。図7の例では、「出口まで450m」となっているが、車の走行に応じてその数値は小さな値になる。また、トンネル内の標高を示すゲージD1が表示されている。
【0052】
なお図4から図7に示したようなトンネル案内モードでナビゲーション画像を表示する際においては、トンネルの出入り口の位置、全長、及び勾配を示す地図情報、並びにトンネルの地上の建物の地図情報が必要となるが、それらの地図情報は、例えば、記憶装置19に記録されている地図データ21に含まれており、処理部53は、地図データ21に含まれているそれらの情報を取得して、図4から図7に示したナビゲーション画像を生成する。
【0053】
また自車アイコンC3(例えば、図5又は図6)のトンネル案内画像P1上の位置は、トンネルの全長と、自車の現在位置からトンネル出口までの距離に基づいて算出される。また地上画像P2の縮尺は、トンネルの全長に基づいて算出される。
【0054】
このように、設定された表示モードによるナビゲーション画像の表示が開始されると、処理は、ステップS2に戻り、それ以降の処理が同様に行われる。
【0055】
以上のように、自車が走行するトンネルの形態(例えば、トンネルの断面)が描かれている画像を含むトンネル案内画像P1を表示するようにしたので、ドライバは、走行するトンネルの状況を直観的に把握することができる。
【0056】
また以上のように、トンネルの形態がその勾配に応じて描かれているので、トンネルの勾配を直観的に把握することができる。
【0057】
また以上のように、自車のアイコンC3を、自車の実際のトンネル内の位置に応じた位置に表示するようにしたので、トンネル内の自車の位置を容易に把握することができる。
【0058】
また以上のように、トンネル案内画像P1と、トンネルの地上の様子を表す地上画像P2をそれぞれ対応させて表示するようにしたので、ユーザは、トンネル内の状況とともに、地上の様子を容易に把握することができる。
【0059】
なお以上においては、トンネル案内画像P1と地上画像P2とがともに表示される場合を例として説明したが、例えばトンネル案内画像P1だけが表示されるようにすることもできる。
【0060】
また図4から図6においては、入口から出口までの全体が表示される縮尺でトンネルの形態を表示するようにしたが、ある範囲の部分(例えば、自車の前後十数メートルの範囲)が表示されるようにすることもできる。
【0061】
また以上においては、トンネル案内モードの対象をすべてのトンネルとしたが、例えば所定の距離以上の長さのトンネルだけを対象とすることができる。即ち短いトンネル(即ち所定の距離より短いトンネル)を走行するときは、表示モードはトンネル案内モードに変更されず(即ち通常案内モードが維持され)、長いトンネル(即ち所定の距離以上の長さのトンネル)を走行するとき、表示モードが、トンネル案内モードに変更されるようにすることができる。
【0062】
また以上においては、トンネルから出たとき、走行中の道路がトンネルでないと判定され、表示モードは、通常案内モードに変更されるが、例えばあるトンネル(以下、第1のトンネルと称する)の出口から次のトンネル(以下、第2のトンネルと称する)の入口までの距離が所定の距離以下である場合(即ちトンネル間の間隔が短い場合)、第1のトンネルの出口から出た場合においても、表示モードが、通常案内モードに変更されずにトンネル案内モードに維持されるようにすることができる。例えば自車が走行している第1のトンネルの出口から、次の第2のトンネルの入口までの距離が所定の距離以下である場合、自車が上記第1のトンネルの出口から第2のトンネルの入口までの間を走行している間においても、自車がトンネル内を走行していると判定され、表示モードが、トンネル案内モードに維持される。
【0063】
また以上においては、勾配情報は、地図データ21に含まれているものとすることもできるし、加速度センサーによってトンネルの勾配を検出することもできる。
【0064】
また以上においては、走行中の道路がトンネルであると判定された場合、表示モードが、トンネル案内モードに変更されるものとしたが、例えばトンネルに一定距離以内に近づいたときは、走行中の道路がまだトンネルでなくても、トンネル案内モードに変更することもできる。また例えば、ユーザが入力部14を操作して地図上のトンネルを指定したとき、表示モードを、トンネル案内モードに変更するようにし、指定されたトンネルに対応するトンネル案内画像P1や地上画像P2が表示されるようにすることもできる。
【0065】
また図4から図6の表示例では、図7の表示例で示したような出口までの距離が示されていないが、図4から図6の表示例においても、出口までの距離が示されるようにすることもできる。
【0066】
また図4から図7の表示例における地上画像P2では、トンネルの上の地上にある建物等が模式的に示されていたが、トンネルの上の地上の様子を表すものであれば、他の画像でもよい。例えば建物の名称や地域名を表す文字、又は天気を表す文字や記号を含む画像とすることもできる。また地上に限らず、例えば、トンネルが海中にある場合は、その海中の様子を表すものであってもよい。さらにトンネルの上の様子に限らず、例えばトンネルの下にある地層等を表すものであってもよい。即ちトンネルの位置に対応するトンネルの外の様子を表すものであれば、トンネル案内画像P1とともに表示することができる。
【0067】
以上、本発明の一実施の形態について説明したが、本発明はこれ以外にも種々変形可能となっている。例えば自動車用の他、自転車用などのナビゲーションシステムに適用できる。
【産業上の利用可能性】
【0068】
本発明は、すべてのナビゲーションシステムに適用できる。
【図面の簡単な説明】
【0069】
【図1】本発明を適用したナビゲーション装置の構成例を示すブロック図である。
【図2】ナビゲーション処理を実行するためのナビゲーション装置の機能的構成例を示すブロック図である。
【図3】ナビゲーション処理の流れを示すフローチャートである。
【図4】トンネル案内モードでのナビゲーション画像の表示例を示す図である。
【図5】トンネル案内モードでのナビゲーション画像の他の表示例を示す図である。
【図6】トンネル案内モードでのナビゲーション画像の他の表示例を示す図である。
【図7】トンネル案内モードでのナビゲーション画像の他の表示例を示す図である。
【符号の説明】
【0070】
1 ナビゲーション装置, 11 マイクロコンピュータ, 12 GPSアンテナ, 13 自律航法ユニット, 14 入力部, 15 表示部, 16 音声制御部, 17 スピーカ, 18 一時メモリ, 19 記憶装置, 51 検索部, 52 制御部, 53 処理部, 54 表示制御部
【技術分野】
【0001】
本発明は、ナビゲーション装置、ナビゲーション方法、及びプログラムに関する。
【背景技術】
【0002】
近年、自動車等の移動時に、複数の人工衛星から地上に無線送信される航法電波を受信して現在位置を検出するGPS(global positional system)を利用して自車の位置を表示するナビゲーション装置が広く用いられている。
【0003】
またナビゲーション装置で表示されるナビゲーション画像についても、経路情報を効果的にユーザに提示する工夫が各種提案されている。例えばトンネルを走行する場合ドライバの緊張が高まることから、トンネル走行中に、トンネルの名称や、トンネル出口までの距離を表示する方法が提案されている(特許文献1)。
【0004】
【特許文献1】特開2001−33261号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら特許文献1の発明では、トンネルの名称や出口までの距離が、単に、テキストとして表示されるだけで、トンネルの状況を容易に把握できるものではない。
【0006】
トンネル内ではドライバは、例えば道路勾配を把握しづらく、上り勾配では速度低下しやすく、下り勾配では速度超過になりやすいといった問題がある。
【0007】
そこで、本発明は、このような状況に鑑みてなされたものであり、トンネルの状況を容易に把握することができるようにするものである。
【課題を解決するための手段】
【0008】
本発明のナビゲーション装置は、自車が走行する経路を含む地図画像を表示するナビゲーション装置において、自車が走行するトンネルの形態を表すトンネル案内画像と、トンネルの位置に対応するトンネルの外の様子を表す画像とを表示させる表示制御手段を有することを特徴とする。
【0009】
道路の勾配を検出する勾配検出手段をさらに有し、トンネル案内画像には、トンネルの形態が勾配に応じて描かれているようにすることができる。
【0010】
自車位置を検出する検出手段をさらに有し、表示制御手段は、トンネル案内画像上の、トンネル内の自車位置に応じた位置に、自車のアイコンを表示させることができる。
【0011】
自車がトンネル内を走行しているか否かを判定するトンネル判定手段をさらに有し、表示制御手段は、トンネル案内画像および地上画像がそれぞれ対応して表示される第1のモードと、他の第2のモードの表示モードを有し、トンネル判定手段により自車がトンネル内を走行していると判定された場合、表示モードを第1のモードに設定することができる。
【0012】
判定手段は、自車が所定の距離以上の長さのトンネルを走行している場合、自車がトンネル内を走行していると判定することができる。
【0013】
自車が走行している第1のトンネルの出口から、次の第2のトンネルの入口までの距離が所定の距離以下である場合、自車が第1のトンネルの出口から第2のトンネルの入口までの間を走行している間においても、第1のモードが維持されるようにすることができる。
【0014】
本発明のナビゲーション方法は、自車が走行する経路を含む地図画像を表示するナビゲーション装置のナビゲーション方法において、自車が走行するトンネルの形態を表すトンネル案内画像と、トンネルの位置に対応するトンネルの外の様子を表す画像とを表示させる表示制御ステップを含むことを特徴とする。
【0015】
本発明のプログラムは、自車が走行する経路を含む地図画像を表示する処理をコンピュータに実行させるプログラムにおいて、自車が走行するトンネルの形態を表すトンネル案内画像と、トンネルの位置に対応するトンネルの外の様子を表す画像とを表示させる表示制御ステップを含む処理をコンピュータに実行させることを特徴とする。
【発明の効果】
【0016】
本発明によれば、トンネルの状況を容易に把握することができる。
【発明を実施するための最良の形態】
【0017】
図1は、本発明を適用したナビゲーション装置1の内部構成例を示すブロック図である。この図1において、ナビゲーション装置1は、マイクロコンピュータ11、GPSアンテナ12、自律航法ユニット13、入力部14、表示部15、音声制御部16、スピーカ17、一時メモリ18、記憶装置19等を備えて構成されている。
【0018】
マイクロコンピュータ11は、図示せぬ、メモリ、CPU(Central Processing Unit)、入出力ポートなどを有する。入出力ポートには、GPSアンテナ12、自律航法ユニット13、入力部14、表示部15、音声制御部16、一時メモリ18、及び記憶装置19が接続される。マイクロコンピュータ11のCPUは、メモリや記憶装置19などから図示せぬ制御プログラムを読み込んで実行する。
【0019】
例えばマイクロコンピュータ11は、GPSアンテナ12、自律航法ユニット13、及び入力部14等を介して入力されるデータに基づいて、ナビゲーション装置1が搭載されている車両(以下、自車と称する)の地図上の位置を検出する。そしてマイクロコンピュータ11は、検出した自車位置を含む地図情報を、記憶装置19から検索し、検索した地図情報に対応する地図画像を含むナビゲーション画像を、表示部15に表示させる。
【0020】
またマイクロコンピュータ11は、詳細は後述するが、例えば自車がトンネル内の道路(以下、適宜、トンネルと略称する)上にあるとき、ナビゲーション画像の表示モードを、トンネルの状況を表す画像(以下、トンネル案内画像P1と称する)と、そのトンネルの地上の様子を表す画像(以下、地上画像P2と称する)とが表示されるモード(以下、トンネル案内モードと称する)にし、トンネル内の走行を案内する。
【0021】
なお通常は(即ち、例えば自車がトンネル内を走行していないときは)、マイクロコンピュータ11は、表示モードを、自車が位置する道路を含む一般的な地図画像が表示されるモード(以下、通常案内モードと称する)に設定する。
【0022】
またマイクロコンピュータ11は、ユーザからの要求に応じて、出発地から目的地までの誘導経路を検索する。マイクロコンピュータ11は、通常案内モード及びトンネル案内モードにおいて、ユーザからの要求に応じて、自車の誘導経路に対する走行に従い、例えば曲がるべき交差点に近づいた時に、その交差点の表示を拡大する等の誘導処理を実行する。
【0023】
GPS(Global Positioning System)アンテナ12は、地球低軌道に打ち上げられた複数のGPS衛星から送信されるGPS信号を受信する。GPSアンテナ12は、少なくとも3個のGPS衛星から送信されるGPS信号を受信し、マイクロコンピュータ11に出力する。
【0024】
自律航法ユニット13は、角度センサー、加速度センサー、距離センサー等を備えて構成される。角度センサーは、車の角速度(例えば、単位時間あたりの水平方向への回転角度)を検出して、移動方位の変化量を算出する。加速度センサーは、車の加速度を検出して、自車の前後方向の加速度を算出する。距離センサーは、車輪の回転に応じて出力されるパルス信号を検出して、自車の移動量を算出する。自律航法ユニット13は、これら角速度信号、加速度信号及び車速パルス信号を、マイクロコンピュータ11に出力する。
【0025】
入力部14は、文字キー、数字キー、検索キーの他、ナビゲーションを利用するための各種機能に対応付けられた各種キーを備え、操作されたキーに対する操作信号をマイクロコンピュータ11に出力する。また、入力部14は、カラー液晶ディスプレイ等により構成される表示部15を覆うように設けられたタッチパネルを備えてもよく、電磁誘導式、磁気歪式、感圧式等の座標読み取り原理でタッチ指示された座標を検出し、検出した座標を位置信号としてマイクロコンピュータ11に出力することもできる。あるいは、入力部14は、リモートコントローラ、マイクロフォン等の入力装置を備える構成としてもよい。
【0026】
表示部15は、カラー液晶ディスプレイ等により構成され、入力部14における入力内容や、マイクロコンピュータ11から入力されるナビゲーション用の表示情報を表示する。
【0027】
音声制御部16は、マイクロコンピュータ11から入力された信号に応じた音声信号をスピーカ17から出力させる。
【0028】
一時メモリ18は、RAM、ROM等から構成され、マイクロコンピュータ11によって実行される各種プログラムやこれら各種プログラムにかかるデータ等を一時的に記憶するワークエリアを形成する。
【0029】
記憶装置19は、例えばハードディスクドライバ等により構成され、マイクロコンピュータ11により実行されるナビゲーション装置1の各種アプリケーションを記憶している。記憶装置19はまた、過去に走行した経路、ナビゲーション装置1の動作に関する各種設定内容を記憶している。
【0030】
記憶装置19はまた、自車の現在位置の検出、目的地までの経路探索、及びナビゲーションの表示等に使用する地図データ21、並びに道路、施設、海、及び湖等の各種シンボルデータ22を記憶する。
【0031】
図2は、本発明の実施の形態としてのナビゲーション処理を実行するナビゲーション装置1の機能的構成例を示すブロック図である。この機能は、マイクロコンピュータ11のCPUが、メモリなどから図示せぬ制御プログラムを読み込んで実行することにより実現される。
【0032】
なお、マイクロコンピュータ11が実行する制御プログラムは、ナビゲーション装置1の出荷前に、マイクロコンピュータ11のメモリなどに記憶されたものであっても、ナビゲーション装置1の出荷後に、マイクロコンピュータ11のメモリなどに記憶されたものであってもよい。また、制御プログラムの一部が、ナビゲーション装置1の出荷後に、マイクロコンピュータ11のメモリなどに記憶されたものであってもよい。ナビゲーション装置1の出荷後に、マイクロコンピュータ11のメモリなどに記憶される制御プログラムは、例えばCD−ROMなどのコンピュータ読取可能な記録媒体に記憶されているものをインストールしたものであっても、インターネットなどの伝送媒体を介してダウンロードしたものをインストールしたものであってもよい。
【0033】
検索部51は、GPSアンテナ12により受信されたGPS信号、自律航法ユニット13により検出された角速度信号及び車速パルス信号に基づいて、自車の現在地を検出する。具体的には検索部51は、航法電波に含まれる複数のGPS人工衛星からの電波到着時刻、地球周回の軌道と受信電波の到達時刻とから各GPS人工衛星までの距離を計算し、自車位置を検出する。またトンネルや高架道路下等でGPS人工衛星からの航法電波が届かない場合、検索部51は、自律航法ユニット13からの出力である自車の速度と左右の傾きにより自車位置を検出する。
【0034】
検索部51はまた、自車の速度と加速度信号に基づいて、道路の勾配を検出する。
【0035】
検索部51はまた、ユーザによる入力部14に対する操作に応じて、記憶装置19に記憶されている地図データ21やシンボルデータ22を利用した、例えば自車の現在地からユーザにより指定された目的地までの誘導経路検索を実行する。
【0036】
制御部52は、表示モードを、通常案内モード又はトンネル案内モードに設定し(又は切り換えて)、処理部53を制御して、設定した表示モードでのナビゲーション画像を表示させる。
【0037】
例えば制御部52は、検索部51により検出された自車位置と地図データ21に基づいて、走行中の道路がトンネルであるか否かを判定し、トンネルであると判定した場合、表示モードを、トンネル案内モードに設定する。また走行中の道路がトンネルではなくなったと判定した場合、制御部52は、表示モードを、通常案内モードに設定する。
【0038】
処理部53は、制御部52の制御に従って、設定された表示モードに応じたナビゲーション画像の画像データを生成し、表示制御部54に供給する。
【0039】
表示制御部54は、処理部53から供給された画像データに対応する画像を、表示部15に表示させる。
【0040】
図3は、本発明の実施の形態としてのナビゲーション処理の流れを示すフローチャートである。
【0041】
ステップS1において、マイクロコンピュータ11の制御部52は、表示モードを、通常案内モード又はトンネル案内モードに設定する処理を開始する。具体的には上述したように、制御部52は、検索部51により検出された自車位置と地図データ21に基づいて、走行中の道路がトンネルであるか否かを判定し、トンネルであると判定した場合、表示モードを、トンネル案内モードに設定する。また走行中の道路がトンネルではないと判定した場合、制御部52は、表示モードを、通常案内モードに設定する。
【0042】
ステップS2において、処理部53は、ステップS1の処理により、表示モードの設定が変更されたか否かを判定し、変更されたと判定した場合、ステップS3において、変更された表示モードでのナビゲーション画像の表示を開始する。
【0043】
例えば自車がトンネルから出て、表示モードがトンネル案内モードから通常案内モードに変更された場合、又はナビゲーション装置1の電源が投入され、表示モードが通常案内モードに初期設定された場合、通常案内モードでのナビゲーション画像を表示する処理が開始される。なおこの場合において誘導経路に対する誘導開始が設定されているとき、誘導経路に対する誘導処理が実行され、その誘導処理に応じた画像が表示される。
【0044】
一方、例えば自車がトンネルに入って、表示モードが通常案内モードからトンネル案内モードに変更された場合、トンネル案内モードでのナビゲーション画像を表示する処理が開始される。なおこの場合において誘導経路に対する誘導開始が設定されているとき、誘導経路に対する誘導処理が実行され、その誘導処理に応じた画像が表示させる。
【0045】
図4は、トンネル案内モードでのナビゲーション画像の表示例を示す図である。この例の場合、入口から出口までのトンネル全体を横から見たときの断面が模式的に描かれている画像を含むトンネル案内画像P1が表示される。図4の例では、トンネル案内画像P1のR11の領域には、地表からトンネルの上側までの地層部分の断面が示され、R12の領域には、トンネル部分の断面が示され、R13の領域には、トンネルの下側の地層部分の断面が示されている。
【0046】
またトンネルの地上の様子を模式的に示す地上画像P2が、トンネル案内画像P1に対応して表示される。例えば、ナビゲーション画像上のX軸上におけるトンネルと建物の位置関係が、実際の位置関係に対応するものとなっている。
【0047】
またこのトンネル案内モードでのナビゲーション画像には、トンネルの入口と出口に対応する位置に、トンネルの入口を表すアイコンC1と、出口を表すアイコンC2が表示される。
【0048】
またこのトンネル案内モードでのトンネル案内画像P1には、自車を表すアイコンC3が、自車の実際のトンネルの位置に応じた位置に表示される。
【0049】
図5は、トンネル案内モードでのナビゲーション画像の他の表示例を示す図である。この例は、自車がトンネル内を走行しているときの表示例である。なお図4は、自車がトンネルに入った直後の表示例である。図5のトンネル案内画像P1の基本的な構成は図4の例の場合と同様であるが、この例の場合、トンネルのほぼ中央まで自車の位置が進み、自車を表すアイコンC3が、トンネル案内画像P1のほぼ中央に表示されている。
【0050】
図6は、トンネル案内モードでのナビゲーション画像の他の表示例を示す図である。図6のトンネル案内画像P1の基本的な構成は図4の例の場合と同様であるが、この例の場合、トンネルの断面が、トンネルの実際の勾配に応じた一定の勾配を有して描かれている。
【0051】
図7は、トンネル案内モードによるナビゲーション画像の他の表示例を示す図である。この例の場合、伸びる方向にトンネルを見たときの断面が描かれている画像を含むトンネル案内画像P1が表示されている。また、トンネル出口までの距離が示されている。図7の例では、「出口まで450m」となっているが、車の走行に応じてその数値は小さな値になる。また、トンネル内の標高を示すゲージD1が表示されている。
【0052】
なお図4から図7に示したようなトンネル案内モードでナビゲーション画像を表示する際においては、トンネルの出入り口の位置、全長、及び勾配を示す地図情報、並びにトンネルの地上の建物の地図情報が必要となるが、それらの地図情報は、例えば、記憶装置19に記録されている地図データ21に含まれており、処理部53は、地図データ21に含まれているそれらの情報を取得して、図4から図7に示したナビゲーション画像を生成する。
【0053】
また自車アイコンC3(例えば、図5又は図6)のトンネル案内画像P1上の位置は、トンネルの全長と、自車の現在位置からトンネル出口までの距離に基づいて算出される。また地上画像P2の縮尺は、トンネルの全長に基づいて算出される。
【0054】
このように、設定された表示モードによるナビゲーション画像の表示が開始されると、処理は、ステップS2に戻り、それ以降の処理が同様に行われる。
【0055】
以上のように、自車が走行するトンネルの形態(例えば、トンネルの断面)が描かれている画像を含むトンネル案内画像P1を表示するようにしたので、ドライバは、走行するトンネルの状況を直観的に把握することができる。
【0056】
また以上のように、トンネルの形態がその勾配に応じて描かれているので、トンネルの勾配を直観的に把握することができる。
【0057】
また以上のように、自車のアイコンC3を、自車の実際のトンネル内の位置に応じた位置に表示するようにしたので、トンネル内の自車の位置を容易に把握することができる。
【0058】
また以上のように、トンネル案内画像P1と、トンネルの地上の様子を表す地上画像P2をそれぞれ対応させて表示するようにしたので、ユーザは、トンネル内の状況とともに、地上の様子を容易に把握することができる。
【0059】
なお以上においては、トンネル案内画像P1と地上画像P2とがともに表示される場合を例として説明したが、例えばトンネル案内画像P1だけが表示されるようにすることもできる。
【0060】
また図4から図6においては、入口から出口までの全体が表示される縮尺でトンネルの形態を表示するようにしたが、ある範囲の部分(例えば、自車の前後十数メートルの範囲)が表示されるようにすることもできる。
【0061】
また以上においては、トンネル案内モードの対象をすべてのトンネルとしたが、例えば所定の距離以上の長さのトンネルだけを対象とすることができる。即ち短いトンネル(即ち所定の距離より短いトンネル)を走行するときは、表示モードはトンネル案内モードに変更されず(即ち通常案内モードが維持され)、長いトンネル(即ち所定の距離以上の長さのトンネル)を走行するとき、表示モードが、トンネル案内モードに変更されるようにすることができる。
【0062】
また以上においては、トンネルから出たとき、走行中の道路がトンネルでないと判定され、表示モードは、通常案内モードに変更されるが、例えばあるトンネル(以下、第1のトンネルと称する)の出口から次のトンネル(以下、第2のトンネルと称する)の入口までの距離が所定の距離以下である場合(即ちトンネル間の間隔が短い場合)、第1のトンネルの出口から出た場合においても、表示モードが、通常案内モードに変更されずにトンネル案内モードに維持されるようにすることができる。例えば自車が走行している第1のトンネルの出口から、次の第2のトンネルの入口までの距離が所定の距離以下である場合、自車が上記第1のトンネルの出口から第2のトンネルの入口までの間を走行している間においても、自車がトンネル内を走行していると判定され、表示モードが、トンネル案内モードに維持される。
【0063】
また以上においては、勾配情報は、地図データ21に含まれているものとすることもできるし、加速度センサーによってトンネルの勾配を検出することもできる。
【0064】
また以上においては、走行中の道路がトンネルであると判定された場合、表示モードが、トンネル案内モードに変更されるものとしたが、例えばトンネルに一定距離以内に近づいたときは、走行中の道路がまだトンネルでなくても、トンネル案内モードに変更することもできる。また例えば、ユーザが入力部14を操作して地図上のトンネルを指定したとき、表示モードを、トンネル案内モードに変更するようにし、指定されたトンネルに対応するトンネル案内画像P1や地上画像P2が表示されるようにすることもできる。
【0065】
また図4から図6の表示例では、図7の表示例で示したような出口までの距離が示されていないが、図4から図6の表示例においても、出口までの距離が示されるようにすることもできる。
【0066】
また図4から図7の表示例における地上画像P2では、トンネルの上の地上にある建物等が模式的に示されていたが、トンネルの上の地上の様子を表すものであれば、他の画像でもよい。例えば建物の名称や地域名を表す文字、又は天気を表す文字や記号を含む画像とすることもできる。また地上に限らず、例えば、トンネルが海中にある場合は、その海中の様子を表すものであってもよい。さらにトンネルの上の様子に限らず、例えばトンネルの下にある地層等を表すものであってもよい。即ちトンネルの位置に対応するトンネルの外の様子を表すものであれば、トンネル案内画像P1とともに表示することができる。
【0067】
以上、本発明の一実施の形態について説明したが、本発明はこれ以外にも種々変形可能となっている。例えば自動車用の他、自転車用などのナビゲーションシステムに適用できる。
【産業上の利用可能性】
【0068】
本発明は、すべてのナビゲーションシステムに適用できる。
【図面の簡単な説明】
【0069】
【図1】本発明を適用したナビゲーション装置の構成例を示すブロック図である。
【図2】ナビゲーション処理を実行するためのナビゲーション装置の機能的構成例を示すブロック図である。
【図3】ナビゲーション処理の流れを示すフローチャートである。
【図4】トンネル案内モードでのナビゲーション画像の表示例を示す図である。
【図5】トンネル案内モードでのナビゲーション画像の他の表示例を示す図である。
【図6】トンネル案内モードでのナビゲーション画像の他の表示例を示す図である。
【図7】トンネル案内モードでのナビゲーション画像の他の表示例を示す図である。
【符号の説明】
【0070】
1 ナビゲーション装置, 11 マイクロコンピュータ, 12 GPSアンテナ, 13 自律航法ユニット, 14 入力部, 15 表示部, 16 音声制御部, 17 スピーカ, 18 一時メモリ, 19 記憶装置, 51 検索部, 52 制御部, 53 処理部, 54 表示制御部
【特許請求の範囲】
【請求項1】
自車が走行する経路を含む地図画像を表示するナビゲーション装置において、
自車が走行するトンネルの形態を表すトンネル案内画像と、上記トンネルの位置に対応する上記トンネルの外の様子を表す画像とを表示させる表示制御手段
を有することを特徴とするナビゲーション装置。
【請求項2】
トンネル内の勾配を検出する勾配検出手段をさらに有し、
前記トンネル案内画像には、前記トンネルの形態が勾配に応じて描かれている
ことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
自車位置を検出する検出手段をさらに有し、
前記表示制御手段は、前記トンネル案内画像上の、前記トンネル内の自車位置に応じた位置に、自車のアイコンを表示させる
ことを特徴とする請求項1又は2に記載のナビゲーション装置。
【請求項4】
自車がトンネル内を走行しているか否かを判定するトンネル判定手段をさらに有し、
前記表示制御手段は、前記トンネル案内画像および前記地上画像がそれぞれ対応して表示される第1のモードと、他の第2のモードの表示モードを有し、前記トンネル判定手段により自車がトンネル内を走行していると判定された場合、表示モードを上記第1のモードに設定する
ことを特徴とする請求項1に記載のナビゲーション装置。
【請求項5】
前記判定手段は、自車が所定の距離以上の長さのトンネルを走行している場合、自車がトンネル内を走行していると判定する
ことを特徴とする請求項4に記載のナビゲーション装置。
【請求項6】
自車が走行している第1のトンネルの出口から、次の第2のトンネルの入口までの距離が所定の距離以下である場合、自車が上記第1のトンネルの出口から上記第2のトンネルの入口までの間を走行している間においても、前記第1のモードが維持される
ことを特徴とする請求項4に記載のナビゲーション装置。
【請求項7】
自車が走行する経路を含む地図画像を表示するナビゲーション装置のナビゲーション方法において、
自車が走行するトンネルの形態を表すトンネル案内画像と、上記トンネルの位置に対応する上記トンネルの外の様子を表す画像とを表示させる表示制御ステップ
を含むことを特徴とするナビゲーション方法。
【請求項8】
自車が走行する経路を含む地図画像を表示する処理をコンピュータに実行させるプログラムにおいて、
自車が走行するトンネルの形態を表すトンネル案内画像と、上記トンネルの位置に対応する上記トンネルの外の様子を表す画像とを表示させる表示制御ステップ
を含む処理をコンピュータに実行させることを特徴とするプログラム。
【請求項1】
自車が走行する経路を含む地図画像を表示するナビゲーション装置において、
自車が走行するトンネルの形態を表すトンネル案内画像と、上記トンネルの位置に対応する上記トンネルの外の様子を表す画像とを表示させる表示制御手段
を有することを特徴とするナビゲーション装置。
【請求項2】
トンネル内の勾配を検出する勾配検出手段をさらに有し、
前記トンネル案内画像には、前記トンネルの形態が勾配に応じて描かれている
ことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
自車位置を検出する検出手段をさらに有し、
前記表示制御手段は、前記トンネル案内画像上の、前記トンネル内の自車位置に応じた位置に、自車のアイコンを表示させる
ことを特徴とする請求項1又は2に記載のナビゲーション装置。
【請求項4】
自車がトンネル内を走行しているか否かを判定するトンネル判定手段をさらに有し、
前記表示制御手段は、前記トンネル案内画像および前記地上画像がそれぞれ対応して表示される第1のモードと、他の第2のモードの表示モードを有し、前記トンネル判定手段により自車がトンネル内を走行していると判定された場合、表示モードを上記第1のモードに設定する
ことを特徴とする請求項1に記載のナビゲーション装置。
【請求項5】
前記判定手段は、自車が所定の距離以上の長さのトンネルを走行している場合、自車がトンネル内を走行していると判定する
ことを特徴とする請求項4に記載のナビゲーション装置。
【請求項6】
自車が走行している第1のトンネルの出口から、次の第2のトンネルの入口までの距離が所定の距離以下である場合、自車が上記第1のトンネルの出口から上記第2のトンネルの入口までの間を走行している間においても、前記第1のモードが維持される
ことを特徴とする請求項4に記載のナビゲーション装置。
【請求項7】
自車が走行する経路を含む地図画像を表示するナビゲーション装置のナビゲーション方法において、
自車が走行するトンネルの形態を表すトンネル案内画像と、上記トンネルの位置に対応する上記トンネルの外の様子を表す画像とを表示させる表示制御ステップ
を含むことを特徴とするナビゲーション方法。
【請求項8】
自車が走行する経路を含む地図画像を表示する処理をコンピュータに実行させるプログラムにおいて、
自車が走行するトンネルの形態を表すトンネル案内画像と、上記トンネルの位置に対応する上記トンネルの外の様子を表す画像とを表示させる表示制御ステップ
を含む処理をコンピュータに実行させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−25741(P2010−25741A)
【公開日】平成22年2月4日(2010.2.4)
【国際特許分類】
【出願番号】特願2008−187275(P2008−187275)
【出願日】平成20年7月18日(2008.7.18)
【出願人】(000003595)株式会社ケンウッド (1,981)
【Fターム(参考)】
【公開日】平成22年2月4日(2010.2.4)
【国際特許分類】
【出願日】平成20年7月18日(2008.7.18)
【出願人】(000003595)株式会社ケンウッド (1,981)
【Fターム(参考)】
[ Back to top ]