
ナビゲーション装置、プログラム、開発支援装置、通信制御方法
【課題】 従来、CANメッセージを組み立てる処理を行うハードウェア実装のCAN/CALモジュールに関する技術がある。しかし、CANネットワークに接続された車載ナビゲーション装置が上記のようなCAN/CALモジュールを搭載した場合であっても、車両のキーオフの間にCANメッセージの処理に使用する車載ナビゲーション装置のCPUの消費電力を抑えることは難しい。
本発明の目的は、車両のキーがオフである間に受信する車両の制御情報を効率よく処理する技術を提供することにある。
【解決手段】
本発明のナビゲーション装置は、メインとサブの2つのCPUを有し、車両のキーがオフである場合に、メインCPUが省電力状態でサブCPUが他のECUからのCANメッセージを処理し、所定のメッセージを受信するとメインCPUにメッセージを送信し、メインCPUはナビゲーション機能を起動させる。
本発明の目的は、車両のキーがオフである間に受信する車両の制御情報を効率よく処理する技術を提供することにある。
【解決手段】
本発明のナビゲーション装置は、メインとサブの2つのCPUを有し、車両のキーがオフである場合に、メインCPUが省電力状態でサブCPUが他のECUからのCANメッセージを処理し、所定のメッセージを受信するとメインCPUにメッセージを送信し、メインCPUはナビゲーション機能を起動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置の技術に関するものである。
【背景技術】
【0002】
従来、CAN(Controller Area Network)の通信に用いる複数のメッセージを組み合わせてCAL(CAN Application Layer)用のメッセージを組み立てる処理を行うハードウェア実装のCAN/CALモジュールに関する技術がある。
【0003】
特許文献1には、このような情報処理装置についての技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表2003−509764号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、CANネットワークに接続されたナビゲーション装置において、上記のようなCAN/CALモジュールを搭載した場合であっても、車両のキーがオフである間にCANネットワークに流れるCANメッセージの処理に使用する消費電力を抑えることは難しい。
【0006】
本発明の目的は、車載用ナビゲーション装置において、車両のキーがオフである間であっても車両の制御情報を効率よく処理する技術を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決すべく、本発明のナビゲーション装置は、第一の演算処理手段と、前記第一の演算処理手段に比較して消費する電力量が少ない第二の演算処理手段と、を備え、前記第二の演算処理手段は、ネットワークからデータを受信する受信手段と、前記受信手段を介して所定の内容を含むデータを受信すると、受信したデータのデータ構造と相違するデータ構造を有するデータに変換して前記第一の演算処理手段に転送する転送手段と、を備え、前記第一の演算処理手段は、前記転送手段により転送されたデータを受信する受信手段と、前記転送されたデータを前記第二の演算処理手段における変換前のデータ構造に変換する変換手段と、を備える、ことを特徴とする。
【0008】
また例えば、ナビゲーション装置のプログラムであって、前記ナビゲーション装置は、第一の演算処理手段と、前記第一の演算処理手段に比較して消費する電力量が少ない第二の演算処理手段と、を備え、前記第二の演算処理手段に、ネットワークからデータを受信する受信手順と、前記受信手順にて所定の内容を含むデータを受信すると、受信したデータのデータ構造と相違するデータ構造を有するデータに変換して前記第一の演算処理手段に転送する転送手順と、を実施させ、前記第一の演算処理手段に、前記転送手順により転送されたデータを受信する受信手順と、前記転送されたデータを前記第二の演算処理手段における変換前のデータ構造に変換する変換手順と、を実施させることを特徴とする。
【0009】
また例えば、ナビゲーション装置の演算処理手段を構築するためのプログラムの開発を支援する開発支援装置であって、前記ナビゲーション装置は、第一の演算処理手段と、前記第一の演算処理手段に比較して消費する電力量が少ない第二の演算処理手段と、ネットワークからデータを受信する受信手段と、を備え、前記ナビゲーション装置の第二の演算処理手段に、前記受信手段において所定の内容を含むデータを受信すると、受信したデータのデータ構造と相違するデータ構造を有するデータに変換して前記第一の演算処理手段に転送する転送手順を実施させる第一のプログラムと、前記ナビゲーション装置の第一の演算処理手段に、前記転送手順により転送されたデータを受信する受信手順を実施させる第二のプログラムと、前記ナビゲーション装置の第一の演算処理手段に、前記第二のプログラムにより実施された受信手順において受信したデータを前記第二の演算処理手段における変換前のデータ構造に変換する変換手順を実施させる第三のプログラムと、を生成するプログラム生成手段、を備えることを特徴とする。
【0010】
また例えば、ナビゲーション装置の通信制御方法であって、前記ナビゲーション装置は、第一の演算処理手段と、前記第一の演算処理手段に比較して消費する電力量が少ない第二の演算処理手段と、を備え、前記第二の演算処理手段は、ネットワークからデータを受信する受信ステップと、前記受信ステップにて所定の内容を含むデータを受信すると、受信したデータのデータ構造と相違するデータ構造を有するデータに変換して前記第一の演算処理手段に転送する転送ステップと、を実施し、前記第一の演算処理手段は、前記転送ステップにより転送されたデータを受信する受信ステップと、前記転送されたデータを前記第二の演算処理手段における変換前のデータ構造に変換する変換ステップと、を実施する、ことを特徴とする。
【発明の効果】
【0011】
本発明によると、車載用ナビゲーション装置において、車両のキーがオフである間であっても車両の制御情報を効率よく処理する技術を提供することができる。
【図面の簡単な説明】
【0012】
【図1】図1は、ナビゲーション装置の概略構成図である。
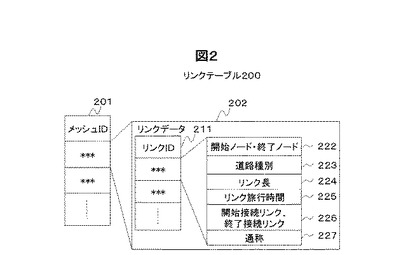
【図2】図2は、リンクテーブルの構成例を示す図である。
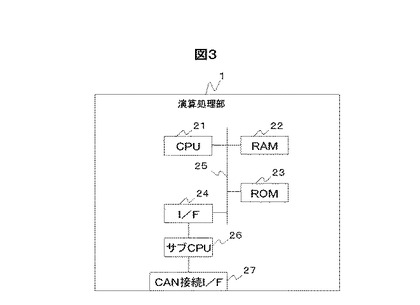
【図3】図3は、ナビゲーション装置の演算処理部の構成図である。
【図4】図4は、演算処理部の機能構成を示す図である。
【図5】図5は、CANデータフレームとUARTデータフレームの構成を示す図である。
【図6】図6は、CANデータ受信処理のフロー図である。
【図7】図7は、CANデータ送信処理のフロー図である。
【図8】図8は、開発支援装置の概略構成図である。
【図9】図9は、CAN方式テーブルの構成例を示す図である。
【図10】図10は、通信プログラムテーブルの構成例を示す図である。
【図11】図11は、生成プログラムテーブルの構成例を示す図である。
【図12】図12は、開発支援装置のハードウェア構成例を示す図である。
【図13】図13は、プログラム生成処理のフロー図である。
【発明を実施するための形態】
【0013】
以下に、本発明の一実施形態が適用された車載用ナビゲーション装置100について、図面を参照して説明する。
【0014】
図1は、本発明が適用された車載用ナビゲーション装置100の概略構成図である。図示するように、車載用ナビゲーション装置100は、演算処理部1と、ディスプレイ2と、記憶装置3と、音声入出力装置4(音声入力装置としてマイクロフォン41、音声出力装置としてスピーカ42)と、入力装置5と、ROM装置6と、車速センサ7と、ジャイロセンサ8と、GPS(Global Positioning System)受信装置9と、FM多重放送受信装置10と、ビーコン受信装置11と、車両ネットワーク接続装置12と、を備えている。
【0015】
演算処理部1は、様々な処理を行う中心的ユニットである。例えば各種センサ7,8やGPS受信装置9、FM多重放送受信装置10、またはビーコン受信装置11から出力される情報を基にして現在地を検出する。また、得られた現在地情報に基づいて、表示に必要な地図データを記憶装置3あるいはROM装置6から読み出す。また、読み出した地図データをグラフィックス展開し、そこに現在地を示すマークを重ねてディスプレイ2へ表示する。
【0016】
また、演算処理部1は、記憶装置3あるいはROM装置6に記憶されている地図データ等を用いて、ユーザから指示された出発地(現在地)と目的地とを結ぶ最適な経路(推奨経路)を探索する。また、スピーカ42やディスプレイ2を用いてユーザを誘導する。
【0017】
また、演算処理部1は、車両ネットワーク接続装置12から受信情報を取得して処理し、送信情報を作成して、車両ネットワーク接続装置12に送信させる。
【0018】
また、演算処理部1は、搭載された車両のキーがオフ(アクセサリー電源オフ)となっている間は、車両ネットワークとの通信のみを行う省電力モードで動作する。
【0019】
演算処理部1の詳細な構成については、後述する。
【0020】
ディスプレイ2は、演算処理部1で生成されたグラフィックス情報を表示するユニットである。ディスプレイ2は、液晶ディスプレイ、有機ELディスプレイなどで構成される。
【0021】
記憶装置3は、HDD(Hard Disk Drive)や不揮発性メモリカードといった、少なくとも読み書きが可能な記憶媒体で構成される。
【0022】
この記憶媒体には、通常の経路探索装置に必要な地図データ(地図上の道路を構成するリンクのリンクデータを含む)であるリンクテーブル200が記憶されている。
【0023】
図2は、リンクテーブル200の構成を示す図である。リンクテーブル200は、地図上の区画された領域であるメッシュの識別コード(メッシュID)201ごとに、そのメッシュ領域に含まれる道路を構成する各リンクのリンクデータ202を含んでいる。
【0024】
リンクデータ202は、リンクの識別子であるリンクID211ごとに、リンクを構成する2つのノード(開始ノード、終了ノード)の座標情報222、リンクを含む道路の種別を示す道路種別223、リンクの距離を示すリンク長224、リンク旅行時間225、リンクを構成する2つのノードにそれぞれ接続するリンクのリンクID(接続リンクID)である開始接続リンク、終了接続リンク226、リンクを含む道路の通称(例えば、「環八通り」等)を示す通称227、等を含んでいる。
【0025】
なお、ここでは、リンクを構成する2つのノードについて開始ノードと終了ノードとを区別することで、同じ道路の上り方向と下り方向とを、それぞれ別のリンクとして管理するようにしている。なお、リンク旅行時間225は、日時、天気などの条件ごとに対応付けられたリンク旅行時間であってもよい。
【0026】
図1に戻って説明する。音声入出力装置4は、音声入力装置としてマイクロフォン41と、音声出力装置としてスピーカ42と、を備える。
【0027】
マイクロフォン41は、使用者やその他の搭乗者が発した声などの車載用ナビゲーション装置100の外部の音声を取得する。
【0028】
スピーカ42は、演算処理部1で生成された使用者へのメッセージを音声として出力する。マイクロフォン41とスピーカ42は、車両の所定の部位に、別個に配されている。ただし、一体の筐体に収納されていても良い。車載用ナビゲーション装置100は、マイクロフォン41及びスピーカ42を、それぞれ複数備えることができる。
【0029】
入力装置5は、使用者からの指示を使用者による操作を介して受け付ける装置である。入力装置5は、タッチパネル51と、ダイヤルスイッチ52と、その他のハードスイッチ(図示しない)であるスクロールキー、縮尺変更キーなどで構成される。
【0030】
タッチパネル51は、ディスプレイ2の表示面側に搭載され、表示画面を透視可能である。タッチパネル51は、ディスプレイ2に表示された画像のXY座標と対応したタッチ位置を特定し、タッチ位置を座標に変換して出力する。タッチパネル51は、感圧式または静電式の入力検出素子などにより構成される。
【0031】
ダイヤルスイッチ52は、時計回り及び反時計回りに回転可能に構成され、所定の角度の回転ごとにパルス信号を発生し、演算処理部1に出力する。演算処理部1では、パルス信号の数から、回転角度を求める。
【0032】
ROM装置6は、CD-ROMやDVDなどのROM(Read Only Memory)やIC(Integrated Circuit)カードといった、少なくとも読み取りが可能な記憶媒体で構成されている。この記憶媒体には、例えば、地図描画用の画像データや、動画データや、音声データなどが記憶されている。
【0033】
車速センサ7,ジャイロセンサ8およびGPS受信装置9は、車載用ナビゲーション装置100において現在地(自車位置)を検出するために使用されるものである。
【0034】
車速センサ7は、車速を算出するのに用いる値を出力するセンサである。ジャイロセンサ8は、光ファイバジャイロや振動ジャイロ等で構成され、移動体の回転による角速度を検出するものである。GPS受信装置9は、GPS衛星からの信号を受信し移動体とGPS衛星間の距離と距離の変化率を3個以上の衛星に対して測定することで移動体の現在位置、進行速度および進行方位を測定し、演算処理部1に送信するものである。
【0035】
FM多重放送受信装置10は、FM多重放送局から送られてくるFM多重放送信号を受信する。FM多重放送には、VICS(Vehicle Information Communication System:登録商標)情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報などやFM多重一般情報としてラジオ局が提供する文字情報などがある。
【0036】
ビーコン受信装置11は、光ビーコン、電波ビーコン等の信号を受信する。ビーコン等の信号には、VICS情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報などがある。
【0037】
車両ネットワーク接続装置12は、車載用ナビゲーション装置100を、図示しない車両の制御ネットワーク規格であるCAN等に対応するネットワークに接続させ、ネットワークに接続された他の車両制御装置であるECU(Electronic control unit)とCANメッセージをやり取りすることで通信を行う装置である。
【0038】
図3に示すように、演算処理部1は、CPU(Central Processing Unit)21と、RAM(Random Access Memory)22と、ROM(Read Only Memory)23と、I/F24と、バス25と、サブCPU26と、CAN接続I/F27と、を有する。
【0039】
CPU21は、数値演算及び各デバイスを制御する等、車載用ナビゲーション装置100が行う様々な主たる処理を実行する。また、CPU21は、電力の消費量を抑えるため、省電力状態(通常状態よりも消費電力の少ない動作モード)として動作させることができる。
【0040】
RAM22は、記憶装置3から読み出した地図データや、演算データなどを格納する。
【0041】
ROM23は、プログラムやデータを格納する。
【0042】
I/F24は、各種ハードウェアを演算処理部1に接続するインターフェイスである。
【0043】
バス25は、CPU21と、RAM22と、ROM23と、I/F24と、を接続する。
【0044】
サブCPU26は、CANメッセージを処理して、CANメッセージの内容に応じて必要であればI/F24を介してCPU21へ情報を送信し、CPU21から出力された情報をCANメッセージに変換して送信する。
【0045】
例えば、CANメッセージの内容が、車両のドアロックが解除されたという内容等、CPU21が通常動作状態へ以降すべき内容であれば、サブCPU26は、CPU21へ情報を送信する。
【0046】
なお、CPU21の通常動作状態に比較して、サブCPU26の通常動作状態では、消費電力が低くなっており、CPU21の省電力状態に比較して、サブCPU26の省電力状態では、消費電力が低くなっている。また、CPU21が省電力状態にある場合でも、サブCPU26は単独で上記処理を実施することができる。
【0047】
CAN接続I/F27は、車両ネットワーク接続装置12とサブCPU26とを接続するインターフェイスである。
【0048】
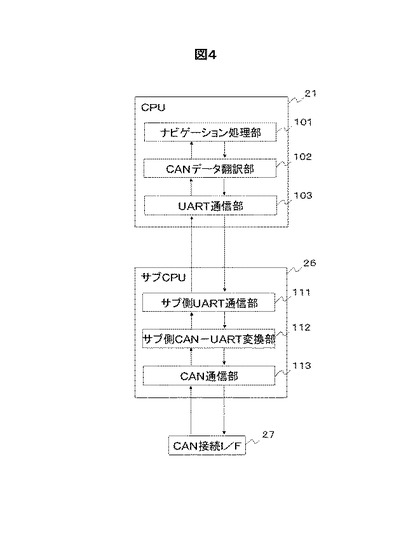
図4は、演算処理部1の機能ブロック図である。
【0049】
図示するように、演算処理部1は、CPU21に配置されたナビゲーション処理部101と、CANデータ翻訳部102と、UART通信部103と、サブCPU26に配置されたサブ側UART通信部111と、サブ側CAN−UART変換部112と、CAN通信部113と、CAN接続I/F27と、を有する。
【0050】
ナビゲーション処理部101は、様々な車載用ナビゲーション装置100に関する処理を行う中心的な機能部であり、処理内容に応じて、他の処理部を制御する。また、ナビゲーション処理部101は、車載用ナビゲーション装置100の基本動作であるナビゲーション処理(例えば、交通情報の表示、現在位置の表示、経路探索、経路誘導等)を実施する。
【0051】
また、ナビゲーション処理部101は、他のECUに対して送信するメッセージの情報をCANネットワークに向けて出力する。
【0052】
CANデータ翻訳部102は、ナビゲーション処理部101からCANネットワークへ送信するメッセージの情報を受け付けると、CANメッセージを生成し、UART(Universal Asynchronous Receiver-Transmitter)のメッセージに変換して、UART通信部103へ受け渡す。
【0053】
UART通信部103は、CANデータ翻訳部102から受け取ったUARTのメッセージをサブCPU26へ送信する。
【0054】
サブ側UART通信部111は、CPU21から送信されたUARTのメッセージを受信すると、サブ側CAN−UART変換部112へ受け渡す。
【0055】
サブ側CAN−UART変換部112は、サブ側UART通信部111から受け渡されたUARTのメッセージをCANのメッセージに変換し、CAN通信部113に受け渡す。
【0056】
CAN通信部113は、サブ側CAN−UART変換部112から受け取ったCANのメッセージを、CAN接続I/F27を介して車両制御ネットワークに送信する。
【0057】
また、これとは逆の流れとして、CAN通信部113は、CAN接続I/F27を介して車両制御ネットワークからCANのメッセージを受信すると、サブ側CAN−UART変換部112へ受け渡す。
【0058】
サブ側CAN−UART変換部112は、CAN通信部113から受け取ったCANのメッセージをUARTのメッセージに変換し、サブ側UART通信部111に受け渡す。
【0059】
サブ側UART通信部111は、サブ側CAN−UART変換部112から受け取ったUARTのメッセージを、CPU21へ送信する。
【0060】
UART通信部103は、サブCPU26からUARTのメッセージを受信すると、CANデータ翻訳部102へ送信する。
【0061】
CANデータ翻訳部102は、UART通信部103からUARTのメッセージを受け取ると、CANのメッセージに変換し、CANのメッセージからナビゲーション処理部101へ受け渡すメッセージを生成して、ナビゲーション処理部101へ受け渡す。
【0062】
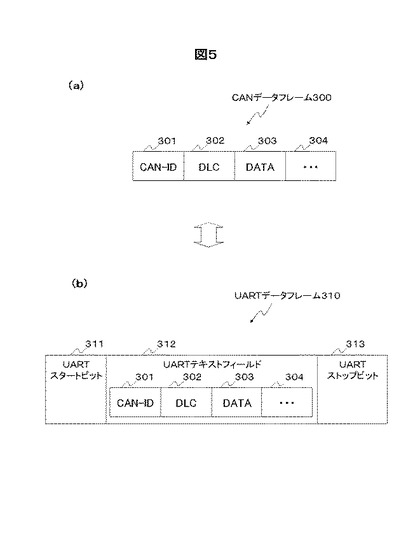
図5は、CANのメッセージであるCANデータフレーム300のデータ構造と、UARTのメッセージであるUARTデータフレーム310のデータ構造と、を示す図である。
【0063】
図5(a)に示すように、CANデータフレーム300は、CAN−ID301と、DLC302と、DATA303と、を少なくとも有している。
【0064】
CAN−ID301は、CANネットワークにおいてメッセージの衝突を防ぐためにCANのメッセージを識別する識別子である。
【0065】
DLC302は、CANメッセージのデータ長等の情報である。
【0066】
DATA303は、CANメッセージの本体の部分にあたる情報である。
【0067】
なお、CANの規格には車体の生産者(車両メーカ)に応じて複数の種類が存在するため、DATA303に格納される情報は、メッセージの内容と、車両メーカと、により様々に異なる。
【0068】
図5(b)に示すように、UARTデータフレーム310は、UARTスタートビット311と、UARTテキストフィールド312と、UARTストップビット313と、を少なくとも有している。
【0069】
UARTスタートビット311は、非同期で通信を行うUARTの特性に応じ、UARTメッセージの開始位置を示す情報である。
【0070】
UARTテキストフィールド312は、UARTメッセージの本体の部分にあたる情報である。なお、本実施形態においては、UARTテキストフィールド312には、CANデータフレーム300を格納する。
【0071】
UARTストップビット313は、UARTのメッセージの終了位置を示す情報である。
【0072】
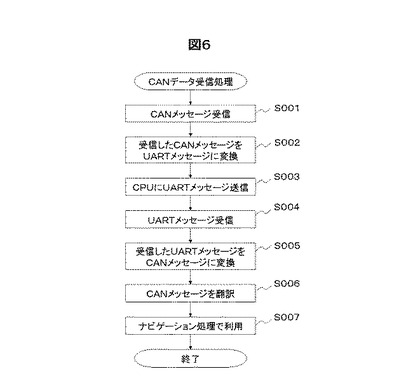
図6は、演算処理部1が、CANネットワークに接続された他のECUからCANデータを受信するCANデータ受信処理のフローを示す図である。
【0073】
まず、車載用ナビゲーション装置100が、車両ネットワーク接続装置12を介してCANメッセージを受信すると、サブCPU26のCAN通信部113は、CAN接続I/F27を介して受信したCANメッセージを受け付ける(ステップS001)。
【0074】
次に、CAN通信部113は、サブ側CAN−UART変換部112に受け付けたCANメッセージを受け渡し、サブ側CAN−UART変換部112は、受け渡されたCANメッセージをUARTのメッセージに変換する(ステップS002)。
【0075】
具体的には、サブ側CAN−UART変換部112は、受け渡されたCANメッセージに、UARTスタートビット311と、UARTストップビット313と、を付加して、UARTデータフレーム310に応じたUARTのメッセージを作成する。もちろん、これに限らず、予めサブ側CAN−UART変換部112に設定されたCANとUARTの各規格に即してCANメッセージとUARTメッセージとを互いに変換するための情報が格納されたテーブルをサブ側CAN−UART変換部112が参照して、受け渡されたCANメッセージをUARTメッセージに変換するようにしてもよい。
【0076】
次に、サブ側UART通信部111は、ステップS002にて作成されたUARTのメッセージを、CPU21に送信する(ステップS003)。
【0077】
次に、CPU21のUART通信部103は、ステップS003にて送信されたUARTのメッセージを受信する(ステップS004)。
【0078】
次に、CPU21のCANデータ翻訳部102は、ステップS004にて受信したUARTのメッセージを受け取り、CANのメッセージに変換する(ステップS005)。
【0079】
具体的には、CANデータ翻訳部102は、ステップS004にて受信したUARTのメッセージを受け取り、UARTメッセージからUARTスタートビット311とUARTストップビット313とを取り除いたUARTテキストフィールド312の情報を取得し、これをCANメッセージとする。もちろん、これに限らず、予めCANデータ翻訳部102に設定されたCANとUARTの各規格に即してCANメッセージとUARTメッセージとを互いに変換するための情報が格納されたテーブルをCANデータ翻訳部102が参照して、受け渡されたUARTメッセージをCANメッセージに変換するようにしてもよい。
【0080】
次に、CANデータ翻訳部102は、ステップS005において変換したCANメッセージを翻訳する(ステップS006)。
【0081】
具体的には、CANデータ翻訳部102は、CANメッセージをナビゲーション処理部101にて解釈可能な情報に変換する。例えば、あるCANメッセージを受信した場合には、CANメッセージの種類とCANメッセージの内容に応じてCANメッセージを解釈し、例えば「ドアのロックが解除された」等の車両制御の情報に変換する。
【0082】
次に、ナビゲーション処理部101は、ステップS006にて翻訳された情報を利用して処理を行う(ステップS007)。
【0083】
例えば、ナビゲーション処理部101は、「ドアのロックが解除された」旨の情報を受け取ると、その情報に応じた処理、例えば車両制御情報の記録を開始し、車載用ナビゲーション装置100のブート処理等を実施する。
【0084】
以上が、CANデータ受信処理のフローである。
【0085】
CANデータ受信処理によって、車載用ナビゲーション装置100は、CANのネットワークを流れるCANメッセージをサブCPU26によって受信処理することができるようになる。
【0086】
なお、このようなCANデータ受信処理のフローは、上記のフローに限られず、例えば、ステップS003において、サブ側CAN−UART変換部112が、所定の内容のCANメッセージを受信した場合のみUARTメッセージを作成してサブ側UART通信部111に受け渡すように変形したものであってもよい。
【0087】
このように変形することで、CANネットワークを流れるCANメッセージのうち、CPU21にて受信するメッセージを絞りこむことができるようになる。これにより、例えば、車載用ナビゲーション装置100が搭載された車両のキーがオフとなっている状態において、CPU21を省電力状態として動作する時間を長く確保できるようになる。
【0088】
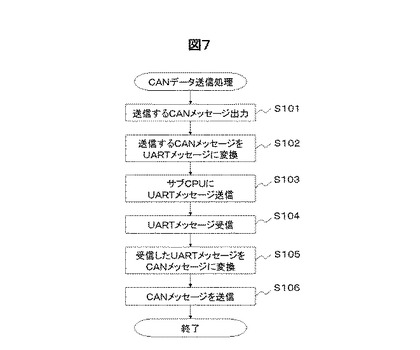
次に、図7のCANデータ送信処理のフローを説明する。
【0089】
CANデータ送信処理は、車載用ナビゲーション装置100が、CANネットワークに接続された他のECUに対してCANのメッセージを送信する際の処理である。
【0090】
まず、ナビゲーション処理部101が、CANネットワークへ送信するメッセージの情報を出力する(ステップS101)。
【0091】
次に、CANデータ翻訳部102は、ナビゲーション処理部101からCANネットワークへ送信するメッセージの情報を受け付けると、CANメッセージを生成し、UARTのメッセージに変換して、UART通信部103へ受け渡す(ステップS102)。
【0092】
具体的には、CANデータ翻訳部102は、CANメッセージを作成した後、UARTスタートビット311と、UARTストップビット313と、をCANメッセージの前後に付加してUARTデータフレーム310に沿うUARTのメッセージを作成し、UART通信部103へ受け渡す。もちろん、これに限らず、予めCANデータ翻訳部102に設定されたCANとUARTの各規格に即してCANメッセージとUARTメッセージとを互いに変換するための情報が格納されたテーブルをCANデータ翻訳部102が参照して、受け渡されたCANメッセージをUARTメッセージに変換するようにしてもよい。
【0093】
次に、UART通信部103は、CANデータ翻訳部102から受け取ったUARTのメッセージをサブCPU26へ送信する(ステップS103)。
【0094】
次に、サブCPU26のサブ側UART通信部111は、ステップS103にてCPU21から送信されたUARTのメッセージを受信すると、サブ側CAN−UART変換部112へ受け渡す(ステップS104)。
【0095】
次に、サブ側CAN−UART変換部112は、サブ側UART通信部111から受け渡されたUARTのメッセージをCANのメッセージに変換し、CAN通信部113に受け渡す(ステップS105)。
【0096】
具体的には、サブ側CAN−UART変換部112は、UARTのメッセージからUARTスタートビット311と、UARTストップビット313と、を取り除いたUARTテキストフィールド312の情報を取得し、これをCANメッセージとする。もちろん、これに限らず、予めサブ側CAN−UART変換部112に設定されたCANとUARTの各規格に即してCANメッセージとUARTメッセージとを互いに変換するための情報が格納されたテーブルをサブ側CAN−UART変換部112が参照して、受け渡されたUARTメッセージをCANメッセージに変換するようにしてもよい。
【0097】
次に、CAN通信部113は、サブ側CAN−UART変換部112から受け取ったCANのメッセージを、CAN接続I/F27を介して車両制御ネットワークに送信する(ステップS106)。
【0098】
以上が、CANデータ送信処理のフローである。
【0099】
CANデータ送信処理により、演算処理部1は、CANネットワークに接続された他のECUに対して、サブCPU26を介してCANメッセージを送信することができる。
【0100】
また、車載用ナビゲーション装置100が搭載された車両のアクセサリ電源がオフである場合に、CPU21の動作を停止させ、サブCPU26を省電力状態で起動させるようにすれば、消費電力の大きいCPU21を稼働させる時間を最小限度に留めることができるため、車両の電源を効率的に使用することができる。
【0101】
<プログラム開発支援装置>ここから、上記のCANデータ受信処理と、CANデータ送信処理と、を実現するCANデータ翻訳部102と、UART通信部103と、サブ側UART通信部111と、サブ側CAN−UART変換部112と、を構築するためのプログラムの開発を支援する開発支援装置について、図8〜図12を用いて説明する。
【0102】
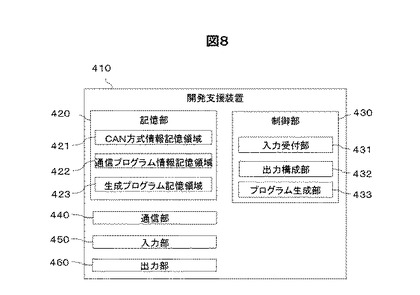
図8は、開発支援装置410の概略の構成を示す図である。
【0103】
図示するように、開発支援装置410は、記憶部420と、制御部430と、通信部440と、入力部450と、出力部460と、を有する。
【0104】
記憶部420は、CAN方式情報記憶領域421と、通信プログラム情報記憶領域422と、生成プログラム記憶領域423と、を備える。
【0105】
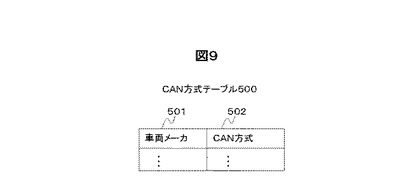
CAN方式情報記憶領域421には、CANの方式に関する情報を記憶するCAN方式テーブル500が記憶される。
【0106】
図9に、CAN方式テーブル500の構成例を示す。
【0107】
CAN方式テーブル500に格納されるレコードは、車両メーカ501と、車両メーカ501に対応付けられたCAN方式502と、を備える。
【0108】
車両メーカ501は、車両メーカを識別する情報である。
【0109】
CAN方式502は、車両メーカごとに採用されているCANの種類が異なるため、その異なるCAN方式を特定する情報である。
【0110】
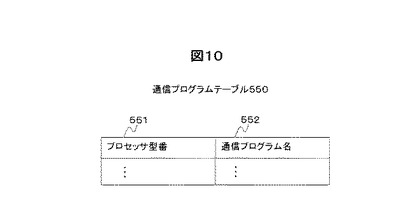
通信プログラム情報記憶領域422には、通信プログラムに関する情報を記憶する通信プログラムテーブル550が記憶される。
【0111】
図10に通信プログラムテーブル550の構成例を示す。
【0112】
通信プログラムテーブル550に格納されるレコードは、プロセッサ型番551と、通信プログラム名552と、を備える。
【0113】
プロセッサ型番551は、CPU21またはサブCPU26の型を識別する情報である。
【0114】
通信プログラム名552は、UART通信部103またはサブ側UART通信部111にて使用する通信プログラムの名称である。
【0115】
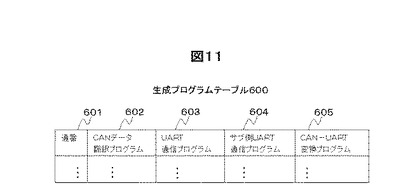
生成プログラム記憶領域423には、生成されたプログラムを記憶する生成プログラムテーブル600が記憶される。
【0116】
図11に生成プログラムテーブル600の構成例を示す。
【0117】
生成プログラムテーブル600に格納されるレコードは、通番601と、CANデータ翻訳プログラム602と、UART通信プログラム603と、サブ側UART通信プログラム604と、CAN−UART変換プログラム605と、を備える。
【0118】
通番601は、生成した一連のプログラムを識別する管理用の番号である。
【0119】
CANデータ翻訳プログラム602は、CANデータ翻訳部102として用いるプログラムである。
【0120】
UART通信プログラム603は、UART通信部103として用いるプログラムである。
【0121】
サブ側UART通信プログラム604は、サブ側UART通信部111として用いるプログラムである。
【0122】
CAN−UART変換プログラム605は、CAN−UART変換部112として用いるプログラムである。
【0123】
制御部430は、入力受付部431と、出力構成部432と、プログラム生成部433と、を有する。
【0124】
入力受付部431は、入力部450を介して使用者からの指示入力を受け付け、これを各処理部に受け渡す処理部である。
【0125】
出力構成部432は、出力する画面を構成し、出力部460に表示させる機能部である。出力部460への表示を要求される画面データと表示候補を受け取り、指定された描画方式で、画像やメッセージ情報などを描画するように画面描画コマンドを生成する。そして、生成したコマンドを、出力部460に送信する。
【0126】
プログラム生成部433は、CANデータ翻訳部102と、UART通信部103と、サブ側UART通信部111と、サブ側CAN−UART変換部112と、を構築するためのプログラムをソフトウェアプログラムとして生成し、開発支援装置410の記憶部420の生成プログラムテーブル600に記憶させる。
【0127】
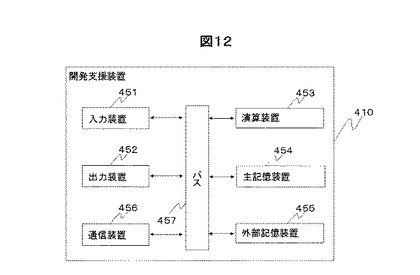
図12は、本実施形態の開発支援装置410のハードウェア構成を示す図である。
【0128】
本実施形態においては、開発支援装置410は、例えば、クライアントPC(パーソナルコンピュータ)や、ワークステーション、サーバ装置、各種携帯電話端末、PDA(Personal Digital Assistant)などの計算機である。
【0129】
開発支援装置410は、入力装置451と、出力装置452と、演算装置453と、主記憶装置454と、外部記憶装置455と、通信装置456と、それぞれの装置を互いに接続するバス457と、を有する。
【0130】
入力装置451は、例えばキーボードやマウス、あるいはタッチペン、その他ポインティングデバイスなどの入力を受け付ける装置である。
【0131】
出力装置452は、例えばディスプレイなどの、表示を行う装置である
演算装置453は、例えばCPU(Central Processing Unit)などの演算装置である。
【0132】
主記憶装置454は、例えばRAM(Random Access Memory)などのメモリ装置である。
【0133】
外部記憶装置455は、例えばハードディスク装置やフラッシュメモリなどの不揮発性記憶装置である。
【0134】
通信装置456は、アンテナを介して無線通信を行う無線通信ユニット等の通信装置である。
【0135】
開発支援装置410の入力受付部431と、出力構成部432と、プログラム生成部433とは、開発支援装置410の演算装置453に処理を行わせるプログラムによって実現される。
【0136】
このプログラムは、主記憶装置454または外部記憶装置455内に記憶され、実行にあたって主記憶装置454上にロードされ、演算装置453により実行される。
【0137】
また、検知情報処理装置410の記憶部420は、開発支援装置410の主記憶装置454または外部記憶装置455により実現される。
【0138】
開発支援装置410の通信部440は、開発支援装置410の通信装置456によって実現される。
【0139】
開発支援装置410の入力部450は、開発支援装置410の入力装置451によって実現される。
【0140】
開発支援装置410の出力部460は、開発支援装置410の出力装置452によって実現される。
【0141】
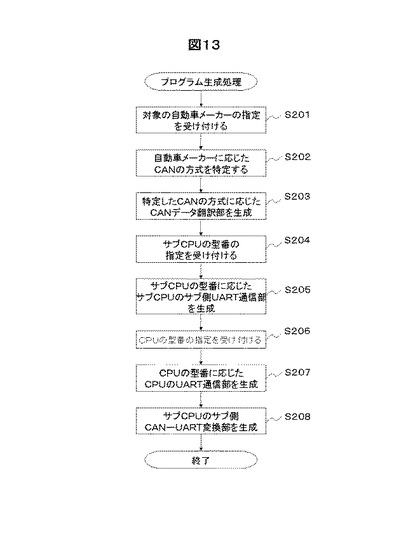
次に、本実施形態におけるプログラム生成処理のフローについて、図13に基づき説明する。
【0142】
図13は、プログラム生成処理の流れを示すフロー図である。
【0143】
まず、プログラム生成部433は、操作者から入力部450を介して対象の自動車メーカの指定を受け付ける(ステップS201)。
【0144】
次に、プログラム生成部433は、ステップS201にて受け付けた自動車メーカに応じたCANの方式を特定する(ステップS202)。
【0145】
具体的には、プログラム生成部433は、CAN方式テーブル500に格納されたレコードから、車両メーカ501の値がステップS201にて受け付けた自動車メーカと一致するレコードを特定する。そして、特定したレコードのCAN方式502を読み出し、CAN方式として特定する。
【0146】
次に、プログラム生成部433は、ステップS202にて特定したCANの方式に応じたCANデータ翻訳部102を構築するためのプログラムを生成する(ステップS203)。
【0147】
具体的には、プログラム生成部433は、ステップS202にて特定したCANの方式に応じて、CANのメッセージとCANのメッセージが示す情報との間の変換およびCANメッセージとUARTメッセージとの変換を行うソフトウェアプログラムとして、CANデータ翻訳部102を構築するプログラムを生成する。
【0148】
そして、プログラム生成部433は、生成したCANデータ翻訳部102を構築するプログラムを生成プログラムテーブル600のCANデータ翻訳プログラム602に格納する。
【0149】
次に、プログラム生成部433は、操作者から入力部450を介してサブCPU26の型番の指定を受けつける(ステップS204)。
【0150】
次に、プログラム生成部433は、ステップS204にて受け付けたサブCPUの型番に応じたサブCPU26のサブ側UART通信部111を構築するためのプログラムを生成する(ステップS205)。
【0151】
具体的には、プログラム生成部433は、通信プログラムテーブル550に格納されたレコードから、プロセッサ型番551の値がステップS204にて受け付けたサブCPUの型番と一致するレコードを特定する。そして、特定したレコードの通信プログラム名552を読み出し、そのプログラム名に該当するプログラムをサブ側UART通信部111を構築するプログラムとして特定する。
【0152】
そして、プログラム生成部433は、特定したプログラムを、CPU21とUART通信を行うためのサブ側UART通信部111を実現するソフトウェアプログラムとして生成する。そして、プログラム生成部433は、生成したサブ側UART通信部111のプログラムを生成プログラムテーブル600のサブ側UART通信プログラム604に格納する。
【0153】
次に、プログラム生成部433は、操作者から入力部450を介してCPU21の型番の指定を受けつける(ステップS206)。
【0154】
次に、プログラム生成部433は、ステップS206にて受け付けたCPUの型番に応じたCPU21のUART通信部103を構築するためのプログラムを生成する(ステップS207)。
【0155】
具体的には、プログラム生成部433は、通信プログラムテーブル550に格納されたレコードから、プロセッサ型番551の値がステップS206にて受け付けたCPUの型番と一致するレコードを特定する。そして、特定したレコードの通信プログラム名552を読み出し、そのプログラム名に該当するプログラムをUART通信部103を構築するためのプログラムとして特定する。
【0156】
そして、プログラム生成部433は、特定したプログラムを、サブCPU26とUART通信を行うためのUART通信部103を実現するソフトウェアプログラムとして生成する。そして、プログラム生成部433は、生成したUART通信部103のプログラムを生成プログラムテーブル600のUART通信プログラム603に格納する。
【0157】
次に、プログラム生成部433は、予め定められたサブ側CAN−UART変換部112を実現するソフトウェアプログラムを、生成プログラムテーブル600のCAN−UART変換プログラム605に格納する(ステップS208)。
【0158】
以上が、プログラム生成処理のフローである。
【0159】
開発支援装置410の使用者は、生成プログラムテーブル600のCANデータ翻訳プログラム602と、UART通信プログラム603と、サブ側UART通信プログラム604と、CAN−UART変換プログラム605と、に格納されたプログラムを読み出すことができる。
【0160】
そして開発支援装置410の使用者は、例えば、CANデータ翻訳プログラム602と、UART通信プログラム603とに格納されたプログラムを車載用ナビゲーション装置100の記憶装置3に記憶させ、サブ側UART通信プログラム604と、CAN−UART変換プログラム605とに格納されたプログラムをサブCPU26の内部にあるROMに記憶させることで、演算処理部1を実現することができる。
【0161】
つまり、このようなプログラム生成処理を実施することによって、開発支援装置100は、上記の車載用ナビゲーション装置100の演算処理部1が有するCANデータ翻訳部102と、UART通信部103と、サブ側UART通信部111と、サブ側CAN−UART変換部112と、を構築するためのプログラムを生成することができるようになるといえる。
【0162】
以上、本発明の一実施形態を説明した。
【0163】
本発明の上記実施形態によれば、車載用ナビゲーション装置100は、搭載された車両のキーがオフである時に、サブCPU26にCANネットワークを流れるメッセージの監視を委譲することができるようになる。具体的には、サブCPU26よりも消費電力の大きいCPU21を省電力モードで動作させることができるようになり、車両のキーオフ時の消費電力の節約を行うことができる。
【0164】
また、このような車載用ナビゲーション装置100を用いることで、例えば車両のドアロックが解除されたタイミング等、車両のアクセサリ電源が投入されるよりも以前の段階で車載用ナビゲーション装置100の起動処理を開始することができるようになり、車載用ナビゲーション装置の利用開始タイミングを早めることができるようになる。
【0165】
本発明は、上記実施形態に制限されない。上記実施形態は、本発明の技術的思想の範囲内で様々な変形が可能である。
【0166】
例えば、上記実施形態では開発支援装置410においてプログラム生成処理を行っているが、これに限らず、プログラム生成処理を車載用ナビゲーション装置100において実施できるようにしてもよい。
【0167】
このようにすることで、車載用ナビゲーション装置100が車両に搭載される際に、搭載される車両のメーカに応じたプログラム生成を行うことができるようになる。すなわち、車載用ナビゲーション装置100の搭載先の車両が買い替え等により変更された場合に、車載用ナビゲーション装置100を乗せかえることができるという効果を得ることができるようになる。
【0168】
また、上記実施形態においては、CPU21とサブCPU26との間の通信はUARTメッセージによって行っているが、これに限られない。
【0169】
例えば、CPU21とサブCPU26との間の通信は、他の通信規格、例えばUSART(Universal Synchronous Asynchronous Receiver Transmitter)や、RS−232C(正式名称はANSI/TIA/EIA-232-F-1997)等の通信であってもよい。
【0170】
このようにすることで、CPU21とサブCPU26との間の通信を柔軟に実現することができる。
【0171】
なお、上記の実施形態では、本発明を車載用ナビゲーション装置に適用した例について説明したが、本発明は車載用以外のナビゲーション装置にも適用することができる。
【符号の説明】
【0172】
1:演算処理部、2:ディスプレイ、3:記憶装置、4:音声出入力装置、5:入力装置、6:ROM装置、7:車速センサ、8:ジャイロセンサ、9:GPS受信機、10:FM多重放送受信装置、11:ビーコン受信装置、12:車両ネットワーク接続装置、21:CPU、22:RAM、23:ROM、24:I/F、25:バス、26:サブCPU、27:CAN接続I/F、41:マイクロフォン、42:スピーカ、51:タッチパネル、52:ダイヤルスイッチ、100:車載用ナビゲーション装置、101:ナビゲーション処理部、102:CANデータ翻訳部、103:UART通信部、111:サブ側UART通信部、112:サブ側CAN−UART変換部、113:CAN通信部、200:リンクテーブル、300:CANデータフレーム、310:UARTデータフレーム、410:開発支援装置、420:記憶部、430:制御部、440:通信部、450:入力部、451:入力装置、452:出力装置、453:演算装置、454:主記憶装置、455:外部記憶装置、456:通信装置、457:バス、460:出力部、500:CAN方式テーブル、550:通信プログラムテーブル、600:生成プログラムテーブル
【技術分野】
【0001】
本発明は、ナビゲーション装置の技術に関するものである。
【背景技術】
【0002】
従来、CAN(Controller Area Network)の通信に用いる複数のメッセージを組み合わせてCAL(CAN Application Layer)用のメッセージを組み立てる処理を行うハードウェア実装のCAN/CALモジュールに関する技術がある。
【0003】
特許文献1には、このような情報処理装置についての技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表2003−509764号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、CANネットワークに接続されたナビゲーション装置において、上記のようなCAN/CALモジュールを搭載した場合であっても、車両のキーがオフである間にCANネットワークに流れるCANメッセージの処理に使用する消費電力を抑えることは難しい。
【0006】
本発明の目的は、車載用ナビゲーション装置において、車両のキーがオフである間であっても車両の制御情報を効率よく処理する技術を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決すべく、本発明のナビゲーション装置は、第一の演算処理手段と、前記第一の演算処理手段に比較して消費する電力量が少ない第二の演算処理手段と、を備え、前記第二の演算処理手段は、ネットワークからデータを受信する受信手段と、前記受信手段を介して所定の内容を含むデータを受信すると、受信したデータのデータ構造と相違するデータ構造を有するデータに変換して前記第一の演算処理手段に転送する転送手段と、を備え、前記第一の演算処理手段は、前記転送手段により転送されたデータを受信する受信手段と、前記転送されたデータを前記第二の演算処理手段における変換前のデータ構造に変換する変換手段と、を備える、ことを特徴とする。
【0008】
また例えば、ナビゲーション装置のプログラムであって、前記ナビゲーション装置は、第一の演算処理手段と、前記第一の演算処理手段に比較して消費する電力量が少ない第二の演算処理手段と、を備え、前記第二の演算処理手段に、ネットワークからデータを受信する受信手順と、前記受信手順にて所定の内容を含むデータを受信すると、受信したデータのデータ構造と相違するデータ構造を有するデータに変換して前記第一の演算処理手段に転送する転送手順と、を実施させ、前記第一の演算処理手段に、前記転送手順により転送されたデータを受信する受信手順と、前記転送されたデータを前記第二の演算処理手段における変換前のデータ構造に変換する変換手順と、を実施させることを特徴とする。
【0009】
また例えば、ナビゲーション装置の演算処理手段を構築するためのプログラムの開発を支援する開発支援装置であって、前記ナビゲーション装置は、第一の演算処理手段と、前記第一の演算処理手段に比較して消費する電力量が少ない第二の演算処理手段と、ネットワークからデータを受信する受信手段と、を備え、前記ナビゲーション装置の第二の演算処理手段に、前記受信手段において所定の内容を含むデータを受信すると、受信したデータのデータ構造と相違するデータ構造を有するデータに変換して前記第一の演算処理手段に転送する転送手順を実施させる第一のプログラムと、前記ナビゲーション装置の第一の演算処理手段に、前記転送手順により転送されたデータを受信する受信手順を実施させる第二のプログラムと、前記ナビゲーション装置の第一の演算処理手段に、前記第二のプログラムにより実施された受信手順において受信したデータを前記第二の演算処理手段における変換前のデータ構造に変換する変換手順を実施させる第三のプログラムと、を生成するプログラム生成手段、を備えることを特徴とする。
【0010】
また例えば、ナビゲーション装置の通信制御方法であって、前記ナビゲーション装置は、第一の演算処理手段と、前記第一の演算処理手段に比較して消費する電力量が少ない第二の演算処理手段と、を備え、前記第二の演算処理手段は、ネットワークからデータを受信する受信ステップと、前記受信ステップにて所定の内容を含むデータを受信すると、受信したデータのデータ構造と相違するデータ構造を有するデータに変換して前記第一の演算処理手段に転送する転送ステップと、を実施し、前記第一の演算処理手段は、前記転送ステップにより転送されたデータを受信する受信ステップと、前記転送されたデータを前記第二の演算処理手段における変換前のデータ構造に変換する変換ステップと、を実施する、ことを特徴とする。
【発明の効果】
【0011】
本発明によると、車載用ナビゲーション装置において、車両のキーがオフである間であっても車両の制御情報を効率よく処理する技術を提供することができる。
【図面の簡単な説明】
【0012】
【図1】図1は、ナビゲーション装置の概略構成図である。
【図2】図2は、リンクテーブルの構成例を示す図である。
【図3】図3は、ナビゲーション装置の演算処理部の構成図である。
【図4】図4は、演算処理部の機能構成を示す図である。
【図5】図5は、CANデータフレームとUARTデータフレームの構成を示す図である。
【図6】図6は、CANデータ受信処理のフロー図である。
【図7】図7は、CANデータ送信処理のフロー図である。
【図8】図8は、開発支援装置の概略構成図である。
【図9】図9は、CAN方式テーブルの構成例を示す図である。
【図10】図10は、通信プログラムテーブルの構成例を示す図である。
【図11】図11は、生成プログラムテーブルの構成例を示す図である。
【図12】図12は、開発支援装置のハードウェア構成例を示す図である。
【図13】図13は、プログラム生成処理のフロー図である。
【発明を実施するための形態】
【0013】
以下に、本発明の一実施形態が適用された車載用ナビゲーション装置100について、図面を参照して説明する。
【0014】
図1は、本発明が適用された車載用ナビゲーション装置100の概略構成図である。図示するように、車載用ナビゲーション装置100は、演算処理部1と、ディスプレイ2と、記憶装置3と、音声入出力装置4(音声入力装置としてマイクロフォン41、音声出力装置としてスピーカ42)と、入力装置5と、ROM装置6と、車速センサ7と、ジャイロセンサ8と、GPS(Global Positioning System)受信装置9と、FM多重放送受信装置10と、ビーコン受信装置11と、車両ネットワーク接続装置12と、を備えている。
【0015】
演算処理部1は、様々な処理を行う中心的ユニットである。例えば各種センサ7,8やGPS受信装置9、FM多重放送受信装置10、またはビーコン受信装置11から出力される情報を基にして現在地を検出する。また、得られた現在地情報に基づいて、表示に必要な地図データを記憶装置3あるいはROM装置6から読み出す。また、読み出した地図データをグラフィックス展開し、そこに現在地を示すマークを重ねてディスプレイ2へ表示する。
【0016】
また、演算処理部1は、記憶装置3あるいはROM装置6に記憶されている地図データ等を用いて、ユーザから指示された出発地(現在地)と目的地とを結ぶ最適な経路(推奨経路)を探索する。また、スピーカ42やディスプレイ2を用いてユーザを誘導する。
【0017】
また、演算処理部1は、車両ネットワーク接続装置12から受信情報を取得して処理し、送信情報を作成して、車両ネットワーク接続装置12に送信させる。
【0018】
また、演算処理部1は、搭載された車両のキーがオフ(アクセサリー電源オフ)となっている間は、車両ネットワークとの通信のみを行う省電力モードで動作する。
【0019】
演算処理部1の詳細な構成については、後述する。
【0020】
ディスプレイ2は、演算処理部1で生成されたグラフィックス情報を表示するユニットである。ディスプレイ2は、液晶ディスプレイ、有機ELディスプレイなどで構成される。
【0021】
記憶装置3は、HDD(Hard Disk Drive)や不揮発性メモリカードといった、少なくとも読み書きが可能な記憶媒体で構成される。
【0022】
この記憶媒体には、通常の経路探索装置に必要な地図データ(地図上の道路を構成するリンクのリンクデータを含む)であるリンクテーブル200が記憶されている。
【0023】
図2は、リンクテーブル200の構成を示す図である。リンクテーブル200は、地図上の区画された領域であるメッシュの識別コード(メッシュID)201ごとに、そのメッシュ領域に含まれる道路を構成する各リンクのリンクデータ202を含んでいる。
【0024】
リンクデータ202は、リンクの識別子であるリンクID211ごとに、リンクを構成する2つのノード(開始ノード、終了ノード)の座標情報222、リンクを含む道路の種別を示す道路種別223、リンクの距離を示すリンク長224、リンク旅行時間225、リンクを構成する2つのノードにそれぞれ接続するリンクのリンクID(接続リンクID)である開始接続リンク、終了接続リンク226、リンクを含む道路の通称(例えば、「環八通り」等)を示す通称227、等を含んでいる。
【0025】
なお、ここでは、リンクを構成する2つのノードについて開始ノードと終了ノードとを区別することで、同じ道路の上り方向と下り方向とを、それぞれ別のリンクとして管理するようにしている。なお、リンク旅行時間225は、日時、天気などの条件ごとに対応付けられたリンク旅行時間であってもよい。
【0026】
図1に戻って説明する。音声入出力装置4は、音声入力装置としてマイクロフォン41と、音声出力装置としてスピーカ42と、を備える。
【0027】
マイクロフォン41は、使用者やその他の搭乗者が発した声などの車載用ナビゲーション装置100の外部の音声を取得する。
【0028】
スピーカ42は、演算処理部1で生成された使用者へのメッセージを音声として出力する。マイクロフォン41とスピーカ42は、車両の所定の部位に、別個に配されている。ただし、一体の筐体に収納されていても良い。車載用ナビゲーション装置100は、マイクロフォン41及びスピーカ42を、それぞれ複数備えることができる。
【0029】
入力装置5は、使用者からの指示を使用者による操作を介して受け付ける装置である。入力装置5は、タッチパネル51と、ダイヤルスイッチ52と、その他のハードスイッチ(図示しない)であるスクロールキー、縮尺変更キーなどで構成される。
【0030】
タッチパネル51は、ディスプレイ2の表示面側に搭載され、表示画面を透視可能である。タッチパネル51は、ディスプレイ2に表示された画像のXY座標と対応したタッチ位置を特定し、タッチ位置を座標に変換して出力する。タッチパネル51は、感圧式または静電式の入力検出素子などにより構成される。
【0031】
ダイヤルスイッチ52は、時計回り及び反時計回りに回転可能に構成され、所定の角度の回転ごとにパルス信号を発生し、演算処理部1に出力する。演算処理部1では、パルス信号の数から、回転角度を求める。
【0032】
ROM装置6は、CD-ROMやDVDなどのROM(Read Only Memory)やIC(Integrated Circuit)カードといった、少なくとも読み取りが可能な記憶媒体で構成されている。この記憶媒体には、例えば、地図描画用の画像データや、動画データや、音声データなどが記憶されている。
【0033】
車速センサ7,ジャイロセンサ8およびGPS受信装置9は、車載用ナビゲーション装置100において現在地(自車位置)を検出するために使用されるものである。
【0034】
車速センサ7は、車速を算出するのに用いる値を出力するセンサである。ジャイロセンサ8は、光ファイバジャイロや振動ジャイロ等で構成され、移動体の回転による角速度を検出するものである。GPS受信装置9は、GPS衛星からの信号を受信し移動体とGPS衛星間の距離と距離の変化率を3個以上の衛星に対して測定することで移動体の現在位置、進行速度および進行方位を測定し、演算処理部1に送信するものである。
【0035】
FM多重放送受信装置10は、FM多重放送局から送られてくるFM多重放送信号を受信する。FM多重放送には、VICS(Vehicle Information Communication System:登録商標)情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報などやFM多重一般情報としてラジオ局が提供する文字情報などがある。
【0036】
ビーコン受信装置11は、光ビーコン、電波ビーコン等の信号を受信する。ビーコン等の信号には、VICS情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報などがある。
【0037】
車両ネットワーク接続装置12は、車載用ナビゲーション装置100を、図示しない車両の制御ネットワーク規格であるCAN等に対応するネットワークに接続させ、ネットワークに接続された他の車両制御装置であるECU(Electronic control unit)とCANメッセージをやり取りすることで通信を行う装置である。
【0038】
図3に示すように、演算処理部1は、CPU(Central Processing Unit)21と、RAM(Random Access Memory)22と、ROM(Read Only Memory)23と、I/F24と、バス25と、サブCPU26と、CAN接続I/F27と、を有する。
【0039】
CPU21は、数値演算及び各デバイスを制御する等、車載用ナビゲーション装置100が行う様々な主たる処理を実行する。また、CPU21は、電力の消費量を抑えるため、省電力状態(通常状態よりも消費電力の少ない動作モード)として動作させることができる。
【0040】
RAM22は、記憶装置3から読み出した地図データや、演算データなどを格納する。
【0041】
ROM23は、プログラムやデータを格納する。
【0042】
I/F24は、各種ハードウェアを演算処理部1に接続するインターフェイスである。
【0043】
バス25は、CPU21と、RAM22と、ROM23と、I/F24と、を接続する。
【0044】
サブCPU26は、CANメッセージを処理して、CANメッセージの内容に応じて必要であればI/F24を介してCPU21へ情報を送信し、CPU21から出力された情報をCANメッセージに変換して送信する。
【0045】
例えば、CANメッセージの内容が、車両のドアロックが解除されたという内容等、CPU21が通常動作状態へ以降すべき内容であれば、サブCPU26は、CPU21へ情報を送信する。
【0046】
なお、CPU21の通常動作状態に比較して、サブCPU26の通常動作状態では、消費電力が低くなっており、CPU21の省電力状態に比較して、サブCPU26の省電力状態では、消費電力が低くなっている。また、CPU21が省電力状態にある場合でも、サブCPU26は単独で上記処理を実施することができる。
【0047】
CAN接続I/F27は、車両ネットワーク接続装置12とサブCPU26とを接続するインターフェイスである。
【0048】
図4は、演算処理部1の機能ブロック図である。
【0049】
図示するように、演算処理部1は、CPU21に配置されたナビゲーション処理部101と、CANデータ翻訳部102と、UART通信部103と、サブCPU26に配置されたサブ側UART通信部111と、サブ側CAN−UART変換部112と、CAN通信部113と、CAN接続I/F27と、を有する。
【0050】
ナビゲーション処理部101は、様々な車載用ナビゲーション装置100に関する処理を行う中心的な機能部であり、処理内容に応じて、他の処理部を制御する。また、ナビゲーション処理部101は、車載用ナビゲーション装置100の基本動作であるナビゲーション処理(例えば、交通情報の表示、現在位置の表示、経路探索、経路誘導等)を実施する。
【0051】
また、ナビゲーション処理部101は、他のECUに対して送信するメッセージの情報をCANネットワークに向けて出力する。
【0052】
CANデータ翻訳部102は、ナビゲーション処理部101からCANネットワークへ送信するメッセージの情報を受け付けると、CANメッセージを生成し、UART(Universal Asynchronous Receiver-Transmitter)のメッセージに変換して、UART通信部103へ受け渡す。
【0053】
UART通信部103は、CANデータ翻訳部102から受け取ったUARTのメッセージをサブCPU26へ送信する。
【0054】
サブ側UART通信部111は、CPU21から送信されたUARTのメッセージを受信すると、サブ側CAN−UART変換部112へ受け渡す。
【0055】
サブ側CAN−UART変換部112は、サブ側UART通信部111から受け渡されたUARTのメッセージをCANのメッセージに変換し、CAN通信部113に受け渡す。
【0056】
CAN通信部113は、サブ側CAN−UART変換部112から受け取ったCANのメッセージを、CAN接続I/F27を介して車両制御ネットワークに送信する。
【0057】
また、これとは逆の流れとして、CAN通信部113は、CAN接続I/F27を介して車両制御ネットワークからCANのメッセージを受信すると、サブ側CAN−UART変換部112へ受け渡す。
【0058】
サブ側CAN−UART変換部112は、CAN通信部113から受け取ったCANのメッセージをUARTのメッセージに変換し、サブ側UART通信部111に受け渡す。
【0059】
サブ側UART通信部111は、サブ側CAN−UART変換部112から受け取ったUARTのメッセージを、CPU21へ送信する。
【0060】
UART通信部103は、サブCPU26からUARTのメッセージを受信すると、CANデータ翻訳部102へ送信する。
【0061】
CANデータ翻訳部102は、UART通信部103からUARTのメッセージを受け取ると、CANのメッセージに変換し、CANのメッセージからナビゲーション処理部101へ受け渡すメッセージを生成して、ナビゲーション処理部101へ受け渡す。
【0062】
図5は、CANのメッセージであるCANデータフレーム300のデータ構造と、UARTのメッセージであるUARTデータフレーム310のデータ構造と、を示す図である。
【0063】
図5(a)に示すように、CANデータフレーム300は、CAN−ID301と、DLC302と、DATA303と、を少なくとも有している。
【0064】
CAN−ID301は、CANネットワークにおいてメッセージの衝突を防ぐためにCANのメッセージを識別する識別子である。
【0065】
DLC302は、CANメッセージのデータ長等の情報である。
【0066】
DATA303は、CANメッセージの本体の部分にあたる情報である。
【0067】
なお、CANの規格には車体の生産者(車両メーカ)に応じて複数の種類が存在するため、DATA303に格納される情報は、メッセージの内容と、車両メーカと、により様々に異なる。
【0068】
図5(b)に示すように、UARTデータフレーム310は、UARTスタートビット311と、UARTテキストフィールド312と、UARTストップビット313と、を少なくとも有している。
【0069】
UARTスタートビット311は、非同期で通信を行うUARTの特性に応じ、UARTメッセージの開始位置を示す情報である。
【0070】
UARTテキストフィールド312は、UARTメッセージの本体の部分にあたる情報である。なお、本実施形態においては、UARTテキストフィールド312には、CANデータフレーム300を格納する。
【0071】
UARTストップビット313は、UARTのメッセージの終了位置を示す情報である。
【0072】
図6は、演算処理部1が、CANネットワークに接続された他のECUからCANデータを受信するCANデータ受信処理のフローを示す図である。
【0073】
まず、車載用ナビゲーション装置100が、車両ネットワーク接続装置12を介してCANメッセージを受信すると、サブCPU26のCAN通信部113は、CAN接続I/F27を介して受信したCANメッセージを受け付ける(ステップS001)。
【0074】
次に、CAN通信部113は、サブ側CAN−UART変換部112に受け付けたCANメッセージを受け渡し、サブ側CAN−UART変換部112は、受け渡されたCANメッセージをUARTのメッセージに変換する(ステップS002)。
【0075】
具体的には、サブ側CAN−UART変換部112は、受け渡されたCANメッセージに、UARTスタートビット311と、UARTストップビット313と、を付加して、UARTデータフレーム310に応じたUARTのメッセージを作成する。もちろん、これに限らず、予めサブ側CAN−UART変換部112に設定されたCANとUARTの各規格に即してCANメッセージとUARTメッセージとを互いに変換するための情報が格納されたテーブルをサブ側CAN−UART変換部112が参照して、受け渡されたCANメッセージをUARTメッセージに変換するようにしてもよい。
【0076】
次に、サブ側UART通信部111は、ステップS002にて作成されたUARTのメッセージを、CPU21に送信する(ステップS003)。
【0077】
次に、CPU21のUART通信部103は、ステップS003にて送信されたUARTのメッセージを受信する(ステップS004)。
【0078】
次に、CPU21のCANデータ翻訳部102は、ステップS004にて受信したUARTのメッセージを受け取り、CANのメッセージに変換する(ステップS005)。
【0079】
具体的には、CANデータ翻訳部102は、ステップS004にて受信したUARTのメッセージを受け取り、UARTメッセージからUARTスタートビット311とUARTストップビット313とを取り除いたUARTテキストフィールド312の情報を取得し、これをCANメッセージとする。もちろん、これに限らず、予めCANデータ翻訳部102に設定されたCANとUARTの各規格に即してCANメッセージとUARTメッセージとを互いに変換するための情報が格納されたテーブルをCANデータ翻訳部102が参照して、受け渡されたUARTメッセージをCANメッセージに変換するようにしてもよい。
【0080】
次に、CANデータ翻訳部102は、ステップS005において変換したCANメッセージを翻訳する(ステップS006)。
【0081】
具体的には、CANデータ翻訳部102は、CANメッセージをナビゲーション処理部101にて解釈可能な情報に変換する。例えば、あるCANメッセージを受信した場合には、CANメッセージの種類とCANメッセージの内容に応じてCANメッセージを解釈し、例えば「ドアのロックが解除された」等の車両制御の情報に変換する。
【0082】
次に、ナビゲーション処理部101は、ステップS006にて翻訳された情報を利用して処理を行う(ステップS007)。
【0083】
例えば、ナビゲーション処理部101は、「ドアのロックが解除された」旨の情報を受け取ると、その情報に応じた処理、例えば車両制御情報の記録を開始し、車載用ナビゲーション装置100のブート処理等を実施する。
【0084】
以上が、CANデータ受信処理のフローである。
【0085】
CANデータ受信処理によって、車載用ナビゲーション装置100は、CANのネットワークを流れるCANメッセージをサブCPU26によって受信処理することができるようになる。
【0086】
なお、このようなCANデータ受信処理のフローは、上記のフローに限られず、例えば、ステップS003において、サブ側CAN−UART変換部112が、所定の内容のCANメッセージを受信した場合のみUARTメッセージを作成してサブ側UART通信部111に受け渡すように変形したものであってもよい。
【0087】
このように変形することで、CANネットワークを流れるCANメッセージのうち、CPU21にて受信するメッセージを絞りこむことができるようになる。これにより、例えば、車載用ナビゲーション装置100が搭載された車両のキーがオフとなっている状態において、CPU21を省電力状態として動作する時間を長く確保できるようになる。
【0088】
次に、図7のCANデータ送信処理のフローを説明する。
【0089】
CANデータ送信処理は、車載用ナビゲーション装置100が、CANネットワークに接続された他のECUに対してCANのメッセージを送信する際の処理である。
【0090】
まず、ナビゲーション処理部101が、CANネットワークへ送信するメッセージの情報を出力する(ステップS101)。
【0091】
次に、CANデータ翻訳部102は、ナビゲーション処理部101からCANネットワークへ送信するメッセージの情報を受け付けると、CANメッセージを生成し、UARTのメッセージに変換して、UART通信部103へ受け渡す(ステップS102)。
【0092】
具体的には、CANデータ翻訳部102は、CANメッセージを作成した後、UARTスタートビット311と、UARTストップビット313と、をCANメッセージの前後に付加してUARTデータフレーム310に沿うUARTのメッセージを作成し、UART通信部103へ受け渡す。もちろん、これに限らず、予めCANデータ翻訳部102に設定されたCANとUARTの各規格に即してCANメッセージとUARTメッセージとを互いに変換するための情報が格納されたテーブルをCANデータ翻訳部102が参照して、受け渡されたCANメッセージをUARTメッセージに変換するようにしてもよい。
【0093】
次に、UART通信部103は、CANデータ翻訳部102から受け取ったUARTのメッセージをサブCPU26へ送信する(ステップS103)。
【0094】
次に、サブCPU26のサブ側UART通信部111は、ステップS103にてCPU21から送信されたUARTのメッセージを受信すると、サブ側CAN−UART変換部112へ受け渡す(ステップS104)。
【0095】
次に、サブ側CAN−UART変換部112は、サブ側UART通信部111から受け渡されたUARTのメッセージをCANのメッセージに変換し、CAN通信部113に受け渡す(ステップS105)。
【0096】
具体的には、サブ側CAN−UART変換部112は、UARTのメッセージからUARTスタートビット311と、UARTストップビット313と、を取り除いたUARTテキストフィールド312の情報を取得し、これをCANメッセージとする。もちろん、これに限らず、予めサブ側CAN−UART変換部112に設定されたCANとUARTの各規格に即してCANメッセージとUARTメッセージとを互いに変換するための情報が格納されたテーブルをサブ側CAN−UART変換部112が参照して、受け渡されたUARTメッセージをCANメッセージに変換するようにしてもよい。
【0097】
次に、CAN通信部113は、サブ側CAN−UART変換部112から受け取ったCANのメッセージを、CAN接続I/F27を介して車両制御ネットワークに送信する(ステップS106)。
【0098】
以上が、CANデータ送信処理のフローである。
【0099】
CANデータ送信処理により、演算処理部1は、CANネットワークに接続された他のECUに対して、サブCPU26を介してCANメッセージを送信することができる。
【0100】
また、車載用ナビゲーション装置100が搭載された車両のアクセサリ電源がオフである場合に、CPU21の動作を停止させ、サブCPU26を省電力状態で起動させるようにすれば、消費電力の大きいCPU21を稼働させる時間を最小限度に留めることができるため、車両の電源を効率的に使用することができる。
【0101】
<プログラム開発支援装置>ここから、上記のCANデータ受信処理と、CANデータ送信処理と、を実現するCANデータ翻訳部102と、UART通信部103と、サブ側UART通信部111と、サブ側CAN−UART変換部112と、を構築するためのプログラムの開発を支援する開発支援装置について、図8〜図12を用いて説明する。
【0102】
図8は、開発支援装置410の概略の構成を示す図である。
【0103】
図示するように、開発支援装置410は、記憶部420と、制御部430と、通信部440と、入力部450と、出力部460と、を有する。
【0104】
記憶部420は、CAN方式情報記憶領域421と、通信プログラム情報記憶領域422と、生成プログラム記憶領域423と、を備える。
【0105】
CAN方式情報記憶領域421には、CANの方式に関する情報を記憶するCAN方式テーブル500が記憶される。
【0106】
図9に、CAN方式テーブル500の構成例を示す。
【0107】
CAN方式テーブル500に格納されるレコードは、車両メーカ501と、車両メーカ501に対応付けられたCAN方式502と、を備える。
【0108】
車両メーカ501は、車両メーカを識別する情報である。
【0109】
CAN方式502は、車両メーカごとに採用されているCANの種類が異なるため、その異なるCAN方式を特定する情報である。
【0110】
通信プログラム情報記憶領域422には、通信プログラムに関する情報を記憶する通信プログラムテーブル550が記憶される。
【0111】
図10に通信プログラムテーブル550の構成例を示す。
【0112】
通信プログラムテーブル550に格納されるレコードは、プロセッサ型番551と、通信プログラム名552と、を備える。
【0113】
プロセッサ型番551は、CPU21またはサブCPU26の型を識別する情報である。
【0114】
通信プログラム名552は、UART通信部103またはサブ側UART通信部111にて使用する通信プログラムの名称である。
【0115】
生成プログラム記憶領域423には、生成されたプログラムを記憶する生成プログラムテーブル600が記憶される。
【0116】
図11に生成プログラムテーブル600の構成例を示す。
【0117】
生成プログラムテーブル600に格納されるレコードは、通番601と、CANデータ翻訳プログラム602と、UART通信プログラム603と、サブ側UART通信プログラム604と、CAN−UART変換プログラム605と、を備える。
【0118】
通番601は、生成した一連のプログラムを識別する管理用の番号である。
【0119】
CANデータ翻訳プログラム602は、CANデータ翻訳部102として用いるプログラムである。
【0120】
UART通信プログラム603は、UART通信部103として用いるプログラムである。
【0121】
サブ側UART通信プログラム604は、サブ側UART通信部111として用いるプログラムである。
【0122】
CAN−UART変換プログラム605は、CAN−UART変換部112として用いるプログラムである。
【0123】
制御部430は、入力受付部431と、出力構成部432と、プログラム生成部433と、を有する。
【0124】
入力受付部431は、入力部450を介して使用者からの指示入力を受け付け、これを各処理部に受け渡す処理部である。
【0125】
出力構成部432は、出力する画面を構成し、出力部460に表示させる機能部である。出力部460への表示を要求される画面データと表示候補を受け取り、指定された描画方式で、画像やメッセージ情報などを描画するように画面描画コマンドを生成する。そして、生成したコマンドを、出力部460に送信する。
【0126】
プログラム生成部433は、CANデータ翻訳部102と、UART通信部103と、サブ側UART通信部111と、サブ側CAN−UART変換部112と、を構築するためのプログラムをソフトウェアプログラムとして生成し、開発支援装置410の記憶部420の生成プログラムテーブル600に記憶させる。
【0127】
図12は、本実施形態の開発支援装置410のハードウェア構成を示す図である。
【0128】
本実施形態においては、開発支援装置410は、例えば、クライアントPC(パーソナルコンピュータ)や、ワークステーション、サーバ装置、各種携帯電話端末、PDA(Personal Digital Assistant)などの計算機である。
【0129】
開発支援装置410は、入力装置451と、出力装置452と、演算装置453と、主記憶装置454と、外部記憶装置455と、通信装置456と、それぞれの装置を互いに接続するバス457と、を有する。
【0130】
入力装置451は、例えばキーボードやマウス、あるいはタッチペン、その他ポインティングデバイスなどの入力を受け付ける装置である。
【0131】
出力装置452は、例えばディスプレイなどの、表示を行う装置である
演算装置453は、例えばCPU(Central Processing Unit)などの演算装置である。
【0132】
主記憶装置454は、例えばRAM(Random Access Memory)などのメモリ装置である。
【0133】
外部記憶装置455は、例えばハードディスク装置やフラッシュメモリなどの不揮発性記憶装置である。
【0134】
通信装置456は、アンテナを介して無線通信を行う無線通信ユニット等の通信装置である。
【0135】
開発支援装置410の入力受付部431と、出力構成部432と、プログラム生成部433とは、開発支援装置410の演算装置453に処理を行わせるプログラムによって実現される。
【0136】
このプログラムは、主記憶装置454または外部記憶装置455内に記憶され、実行にあたって主記憶装置454上にロードされ、演算装置453により実行される。
【0137】
また、検知情報処理装置410の記憶部420は、開発支援装置410の主記憶装置454または外部記憶装置455により実現される。
【0138】
開発支援装置410の通信部440は、開発支援装置410の通信装置456によって実現される。
【0139】
開発支援装置410の入力部450は、開発支援装置410の入力装置451によって実現される。
【0140】
開発支援装置410の出力部460は、開発支援装置410の出力装置452によって実現される。
【0141】
次に、本実施形態におけるプログラム生成処理のフローについて、図13に基づき説明する。
【0142】
図13は、プログラム生成処理の流れを示すフロー図である。
【0143】
まず、プログラム生成部433は、操作者から入力部450を介して対象の自動車メーカの指定を受け付ける(ステップS201)。
【0144】
次に、プログラム生成部433は、ステップS201にて受け付けた自動車メーカに応じたCANの方式を特定する(ステップS202)。
【0145】
具体的には、プログラム生成部433は、CAN方式テーブル500に格納されたレコードから、車両メーカ501の値がステップS201にて受け付けた自動車メーカと一致するレコードを特定する。そして、特定したレコードのCAN方式502を読み出し、CAN方式として特定する。
【0146】
次に、プログラム生成部433は、ステップS202にて特定したCANの方式に応じたCANデータ翻訳部102を構築するためのプログラムを生成する(ステップS203)。
【0147】
具体的には、プログラム生成部433は、ステップS202にて特定したCANの方式に応じて、CANのメッセージとCANのメッセージが示す情報との間の変換およびCANメッセージとUARTメッセージとの変換を行うソフトウェアプログラムとして、CANデータ翻訳部102を構築するプログラムを生成する。
【0148】
そして、プログラム生成部433は、生成したCANデータ翻訳部102を構築するプログラムを生成プログラムテーブル600のCANデータ翻訳プログラム602に格納する。
【0149】
次に、プログラム生成部433は、操作者から入力部450を介してサブCPU26の型番の指定を受けつける(ステップS204)。
【0150】
次に、プログラム生成部433は、ステップS204にて受け付けたサブCPUの型番に応じたサブCPU26のサブ側UART通信部111を構築するためのプログラムを生成する(ステップS205)。
【0151】
具体的には、プログラム生成部433は、通信プログラムテーブル550に格納されたレコードから、プロセッサ型番551の値がステップS204にて受け付けたサブCPUの型番と一致するレコードを特定する。そして、特定したレコードの通信プログラム名552を読み出し、そのプログラム名に該当するプログラムをサブ側UART通信部111を構築するプログラムとして特定する。
【0152】
そして、プログラム生成部433は、特定したプログラムを、CPU21とUART通信を行うためのサブ側UART通信部111を実現するソフトウェアプログラムとして生成する。そして、プログラム生成部433は、生成したサブ側UART通信部111のプログラムを生成プログラムテーブル600のサブ側UART通信プログラム604に格納する。
【0153】
次に、プログラム生成部433は、操作者から入力部450を介してCPU21の型番の指定を受けつける(ステップS206)。
【0154】
次に、プログラム生成部433は、ステップS206にて受け付けたCPUの型番に応じたCPU21のUART通信部103を構築するためのプログラムを生成する(ステップS207)。
【0155】
具体的には、プログラム生成部433は、通信プログラムテーブル550に格納されたレコードから、プロセッサ型番551の値がステップS206にて受け付けたCPUの型番と一致するレコードを特定する。そして、特定したレコードの通信プログラム名552を読み出し、そのプログラム名に該当するプログラムをUART通信部103を構築するためのプログラムとして特定する。
【0156】
そして、プログラム生成部433は、特定したプログラムを、サブCPU26とUART通信を行うためのUART通信部103を実現するソフトウェアプログラムとして生成する。そして、プログラム生成部433は、生成したUART通信部103のプログラムを生成プログラムテーブル600のUART通信プログラム603に格納する。
【0157】
次に、プログラム生成部433は、予め定められたサブ側CAN−UART変換部112を実現するソフトウェアプログラムを、生成プログラムテーブル600のCAN−UART変換プログラム605に格納する(ステップS208)。
【0158】
以上が、プログラム生成処理のフローである。
【0159】
開発支援装置410の使用者は、生成プログラムテーブル600のCANデータ翻訳プログラム602と、UART通信プログラム603と、サブ側UART通信プログラム604と、CAN−UART変換プログラム605と、に格納されたプログラムを読み出すことができる。
【0160】
そして開発支援装置410の使用者は、例えば、CANデータ翻訳プログラム602と、UART通信プログラム603とに格納されたプログラムを車載用ナビゲーション装置100の記憶装置3に記憶させ、サブ側UART通信プログラム604と、CAN−UART変換プログラム605とに格納されたプログラムをサブCPU26の内部にあるROMに記憶させることで、演算処理部1を実現することができる。
【0161】
つまり、このようなプログラム生成処理を実施することによって、開発支援装置100は、上記の車載用ナビゲーション装置100の演算処理部1が有するCANデータ翻訳部102と、UART通信部103と、サブ側UART通信部111と、サブ側CAN−UART変換部112と、を構築するためのプログラムを生成することができるようになるといえる。
【0162】
以上、本発明の一実施形態を説明した。
【0163】
本発明の上記実施形態によれば、車載用ナビゲーション装置100は、搭載された車両のキーがオフである時に、サブCPU26にCANネットワークを流れるメッセージの監視を委譲することができるようになる。具体的には、サブCPU26よりも消費電力の大きいCPU21を省電力モードで動作させることができるようになり、車両のキーオフ時の消費電力の節約を行うことができる。
【0164】
また、このような車載用ナビゲーション装置100を用いることで、例えば車両のドアロックが解除されたタイミング等、車両のアクセサリ電源が投入されるよりも以前の段階で車載用ナビゲーション装置100の起動処理を開始することができるようになり、車載用ナビゲーション装置の利用開始タイミングを早めることができるようになる。
【0165】
本発明は、上記実施形態に制限されない。上記実施形態は、本発明の技術的思想の範囲内で様々な変形が可能である。
【0166】
例えば、上記実施形態では開発支援装置410においてプログラム生成処理を行っているが、これに限らず、プログラム生成処理を車載用ナビゲーション装置100において実施できるようにしてもよい。
【0167】
このようにすることで、車載用ナビゲーション装置100が車両に搭載される際に、搭載される車両のメーカに応じたプログラム生成を行うことができるようになる。すなわち、車載用ナビゲーション装置100の搭載先の車両が買い替え等により変更された場合に、車載用ナビゲーション装置100を乗せかえることができるという効果を得ることができるようになる。
【0168】
また、上記実施形態においては、CPU21とサブCPU26との間の通信はUARTメッセージによって行っているが、これに限られない。
【0169】
例えば、CPU21とサブCPU26との間の通信は、他の通信規格、例えばUSART(Universal Synchronous Asynchronous Receiver Transmitter)や、RS−232C(正式名称はANSI/TIA/EIA-232-F-1997)等の通信であってもよい。
【0170】
このようにすることで、CPU21とサブCPU26との間の通信を柔軟に実現することができる。
【0171】
なお、上記の実施形態では、本発明を車載用ナビゲーション装置に適用した例について説明したが、本発明は車載用以外のナビゲーション装置にも適用することができる。
【符号の説明】
【0172】
1:演算処理部、2:ディスプレイ、3:記憶装置、4:音声出入力装置、5:入力装置、6:ROM装置、7:車速センサ、8:ジャイロセンサ、9:GPS受信機、10:FM多重放送受信装置、11:ビーコン受信装置、12:車両ネットワーク接続装置、21:CPU、22:RAM、23:ROM、24:I/F、25:バス、26:サブCPU、27:CAN接続I/F、41:マイクロフォン、42:スピーカ、51:タッチパネル、52:ダイヤルスイッチ、100:車載用ナビゲーション装置、101:ナビゲーション処理部、102:CANデータ翻訳部、103:UART通信部、111:サブ側UART通信部、112:サブ側CAN−UART変換部、113:CAN通信部、200:リンクテーブル、300:CANデータフレーム、310:UARTデータフレーム、410:開発支援装置、420:記憶部、430:制御部、440:通信部、450:入力部、451:入力装置、452:出力装置、453:演算装置、454:主記憶装置、455:外部記憶装置、456:通信装置、457:バス、460:出力部、500:CAN方式テーブル、550:通信プログラムテーブル、600:生成プログラムテーブル
【特許請求の範囲】
【請求項1】
第一の演算処理手段と、
前記第一の演算処理手段に比較して消費する電力量が少ない第二の演算処理手段と、
を備え、
前記第二の演算処理手段は、
ネットワークからデータを受信する受信手段と、
前記受信手段を介して所定の内容を含むデータを受信すると、受信したデータのデータ構造と相違するデータ構造を有するデータに変換して前記第一の演算処理手段に転送する転送手段と、を備え、
前記第一の演算処理手段は、
前記転送手段により転送されたデータを受信する受信手段と、
前記転送されたデータを前記第二の演算処理手段における変換前のデータ構造に変換する変換手段と、を備える、
ことを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置であって、
前記第一の演算処理手段は、さらに、
前記転送されたデータを受信すると、ナビゲーション装置の起動処理を開始する、
ことを特徴とするナビゲーション装置。
【請求項3】
請求項2に記載のナビゲーション装置であって、
前記ナビゲーション装置は、車両に搭載され、
前記受信手段により受信したデータに含まれる所定の内容は、前記車両のドアのロックが解除されたことを通知する内容である、
ことを特徴とするナビゲーション装置。
【請求項4】
ナビゲーション装置のプログラムであって、
前記ナビゲーション装置は、第一の演算処理手段と、前記第一の演算処理手段に比較して消費する電力量が少ない第二の演算処理手段と、を備え、
前記第二の演算処理手段に、
ネットワークからデータを受信する受信手順と、
前記受信手順にて所定の内容を含むデータを受信すると、受信したデータのデータ構造と相違するデータ構造を有するデータに変換して前記第一の演算処理手段に転送する転送手順と、を実施させ、
前記第一の演算処理手段に、
前記転送手順により転送されたデータを受信する受信手順と、
前記転送されたデータを前記第二の演算処理手段における変換前のデータ構造に変換する変換手順と、
を実施させることを特徴とするプログラム。
【請求項5】
請求項4に記載のプログラムであって、さらに、
前記第一の演算処理手段に、前記転送されたデータを受信すると、ナビゲーション装置の起動処理を開始させる、
ことを特徴とするプログラム。
【請求項6】
請求項5に記載のプログラムであって、
前記ナビゲーション装置は、車両に搭載され、
前記第位置の演算処理手段が実施する受信手順により受信したデータに含まれる所定の内容は、前記車両のドアのロックが解除されたことを通知する内容である、
ことを特徴とするプログラム。
【請求項7】
ナビゲーション装置の演算処理手段を構築するためのプログラムの開発を支援する開発支援装置であって、
前記ナビゲーション装置は、第一の演算処理手段と、前記第一の演算処理手段に比較して消費する電力量が少ない第二の演算処理手段と、ネットワークからデータを受信する受信手段と、を備え、
前記ナビゲーション装置の第二の演算処理手段に、前記受信手段において所定の内容を含むデータを受信すると、受信したデータのデータ構造と相違するデータ構造を有するデータに変換して前記第一の演算処理手段に転送する転送手順を実施させる第一のプログラムと、
前記ナビゲーション装置の第一の演算処理手段に、前記転送手順により転送されたデータを受信する受信手順を実施させる第二のプログラムと、
前記ナビゲーション装置の第一の演算処理手段に、前記第二のプログラムにより実施された受信手順において受信したデータを前記第二の演算処理手段における変換前のデータ構造に変換する変換手順を実施させる第三のプログラムと、
を生成するプログラム生成手段、
を備えることを特徴とする開発支援装置。
【請求項8】
請求項7に記載の開発支援装置であって、さらに、
前記ナビゲーション装置の第二の演算処理手段の種類を特定する情報を受け付ける受付手段を備え、
前記プログラム生成手段は、前記受付手段により受け付けた前記情報に応じて、前記第一のプログラムを生成する、
ことを特徴とする開発支援装置。
【請求項9】
請求項7に記載の開発支援装置であって、さらに、
前記ナビゲーション装置の第一の演算処理手段の種類を特定する情報を受け付ける受付手段を備え、
前記プログラム生成手段は、前記受付手段により受け付けた前記情報に応じて、前記第二のプログラムを生成する、
ことを特徴とする開発支援装置。
【請求項10】
ナビゲーション装置の通信制御方法であって、
前記ナビゲーション装置は、第一の演算処理手段と、前記第一の演算処理手段に比較して消費する電力量が少ない第二の演算処理手段と、を備え、
前記第二の演算処理手段は、
ネットワークからデータを受信する受信ステップと、
前記受信ステップにて所定の内容を含むデータを受信すると、受信したデータのデータ構造と相違するデータ構造を有するデータに変換して前記第一の演算処理手段に転送する転送ステップと、を実施し、
前記第一の演算処理手段は、
前記転送ステップにより転送されたデータを受信する受信ステップと、
前記転送されたデータを前記第二の演算処理手段における変換前のデータ構造に変換する変換ステップと、を実施する、
ことを特徴とする通信制御方法。
【請求項1】
第一の演算処理手段と、
前記第一の演算処理手段に比較して消費する電力量が少ない第二の演算処理手段と、
を備え、
前記第二の演算処理手段は、
ネットワークからデータを受信する受信手段と、
前記受信手段を介して所定の内容を含むデータを受信すると、受信したデータのデータ構造と相違するデータ構造を有するデータに変換して前記第一の演算処理手段に転送する転送手段と、を備え、
前記第一の演算処理手段は、
前記転送手段により転送されたデータを受信する受信手段と、
前記転送されたデータを前記第二の演算処理手段における変換前のデータ構造に変換する変換手段と、を備える、
ことを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置であって、
前記第一の演算処理手段は、さらに、
前記転送されたデータを受信すると、ナビゲーション装置の起動処理を開始する、
ことを特徴とするナビゲーション装置。
【請求項3】
請求項2に記載のナビゲーション装置であって、
前記ナビゲーション装置は、車両に搭載され、
前記受信手段により受信したデータに含まれる所定の内容は、前記車両のドアのロックが解除されたことを通知する内容である、
ことを特徴とするナビゲーション装置。
【請求項4】
ナビゲーション装置のプログラムであって、
前記ナビゲーション装置は、第一の演算処理手段と、前記第一の演算処理手段に比較して消費する電力量が少ない第二の演算処理手段と、を備え、
前記第二の演算処理手段に、
ネットワークからデータを受信する受信手順と、
前記受信手順にて所定の内容を含むデータを受信すると、受信したデータのデータ構造と相違するデータ構造を有するデータに変換して前記第一の演算処理手段に転送する転送手順と、を実施させ、
前記第一の演算処理手段に、
前記転送手順により転送されたデータを受信する受信手順と、
前記転送されたデータを前記第二の演算処理手段における変換前のデータ構造に変換する変換手順と、
を実施させることを特徴とするプログラム。
【請求項5】
請求項4に記載のプログラムであって、さらに、
前記第一の演算処理手段に、前記転送されたデータを受信すると、ナビゲーション装置の起動処理を開始させる、
ことを特徴とするプログラム。
【請求項6】
請求項5に記載のプログラムであって、
前記ナビゲーション装置は、車両に搭載され、
前記第位置の演算処理手段が実施する受信手順により受信したデータに含まれる所定の内容は、前記車両のドアのロックが解除されたことを通知する内容である、
ことを特徴とするプログラム。
【請求項7】
ナビゲーション装置の演算処理手段を構築するためのプログラムの開発を支援する開発支援装置であって、
前記ナビゲーション装置は、第一の演算処理手段と、前記第一の演算処理手段に比較して消費する電力量が少ない第二の演算処理手段と、ネットワークからデータを受信する受信手段と、を備え、
前記ナビゲーション装置の第二の演算処理手段に、前記受信手段において所定の内容を含むデータを受信すると、受信したデータのデータ構造と相違するデータ構造を有するデータに変換して前記第一の演算処理手段に転送する転送手順を実施させる第一のプログラムと、
前記ナビゲーション装置の第一の演算処理手段に、前記転送手順により転送されたデータを受信する受信手順を実施させる第二のプログラムと、
前記ナビゲーション装置の第一の演算処理手段に、前記第二のプログラムにより実施された受信手順において受信したデータを前記第二の演算処理手段における変換前のデータ構造に変換する変換手順を実施させる第三のプログラムと、
を生成するプログラム生成手段、
を備えることを特徴とする開発支援装置。
【請求項8】
請求項7に記載の開発支援装置であって、さらに、
前記ナビゲーション装置の第二の演算処理手段の種類を特定する情報を受け付ける受付手段を備え、
前記プログラム生成手段は、前記受付手段により受け付けた前記情報に応じて、前記第一のプログラムを生成する、
ことを特徴とする開発支援装置。
【請求項9】
請求項7に記載の開発支援装置であって、さらに、
前記ナビゲーション装置の第一の演算処理手段の種類を特定する情報を受け付ける受付手段を備え、
前記プログラム生成手段は、前記受付手段により受け付けた前記情報に応じて、前記第二のプログラムを生成する、
ことを特徴とする開発支援装置。
【請求項10】
ナビゲーション装置の通信制御方法であって、
前記ナビゲーション装置は、第一の演算処理手段と、前記第一の演算処理手段に比較して消費する電力量が少ない第二の演算処理手段と、を備え、
前記第二の演算処理手段は、
ネットワークからデータを受信する受信ステップと、
前記受信ステップにて所定の内容を含むデータを受信すると、受信したデータのデータ構造と相違するデータ構造を有するデータに変換して前記第一の演算処理手段に転送する転送ステップと、を実施し、
前記第一の演算処理手段は、
前記転送ステップにより転送されたデータを受信する受信ステップと、
前記転送されたデータを前記第二の演算処理手段における変換前のデータ構造に変換する変換ステップと、を実施する、
ことを特徴とする通信制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−116175(P2011−116175A)
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願番号】特願2009−273191(P2009−273191)
【出願日】平成21年12月1日(2009.12.1)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願日】平成21年12月1日(2009.12.1)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]