
ナビゲーション装置、位置検出方法
【課題】自律航法による測位結果を修正してより精度よく移動体の位置を測位する測位装置を提供すること。
【解決手段】移動体の位置を検出するナビゲーション装置1において、地図データを記憶した地図データ記憶手段13と、移動体の挙動情報を検出する自律センサ12と、GPS等の電波航法測位手段11、10aによる測位結果に自律センサ12による検出情報を累積して移動体の慣性測位位置を検出する慣性測位手段10bと、特徴的な挙動を示した特徴的位置31を検出する特徴的走行位置検出手段10dと、特徴的位置31に基づき地図データ記憶手段13を参照し、当該特徴的位置31に対応する道路位置22の位置情報を抽出する補正量検出手段10eと、特徴的位置31が道路位置22に近接するという条件に基づき、カルマンフィルタにより特徴的位置31を補正する位置補正手段10fと、を有することを特徴とする。
【解決手段】移動体の位置を検出するナビゲーション装置1において、地図データを記憶した地図データ記憶手段13と、移動体の挙動情報を検出する自律センサ12と、GPS等の電波航法測位手段11、10aによる測位結果に自律センサ12による検出情報を累積して移動体の慣性測位位置を検出する慣性測位手段10bと、特徴的な挙動を示した特徴的位置31を検出する特徴的走行位置検出手段10dと、特徴的位置31に基づき地図データ記憶手段13を参照し、当該特徴的位置31に対応する道路位置22の位置情報を抽出する補正量検出手段10eと、特徴的位置31が道路位置22に近接するという条件に基づき、カルマンフィルタにより特徴的位置31を補正する位置補正手段10fと、を有することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は移動体の位置を検出するナビゲーション装置に関し、特に、自律航法により測位された移動体の位置を精度よく補正するナビゲーション装置に関する。
【背景技術】
【0002】
ナビゲーションシステムでは、GPS(Grobal Positioning System)衛星からの電波に基づき自車両の位置を測位して、車速センサ及びジャイロセンサ等を用いて走行距離及び走行方向を累積しながら車両の現在位置を精度よく推定する。
【0003】
しかしながら、GPS衛星からの電波を受信できない状態では、自律航法による測位に含まれる誤差が時間と共に増幅されるため徐々に位置の精度が低下する。
【0004】
このため、自律航法により測位した自車両の位置を補正する種々の方法が提案されている。例えば、マップマッチングでは、ナビゲーションシステムの地図データを利用して自律航法により測位した位置を補正する(例えば、特許文献1参照。)。特許文献1では、自律航法により測位された位置・方向に最も整合する位置及び方位を有する道路を地図データから選択して、該道路に対応づけて位置・方向を補正する方法が提案されている。
【0005】
しかしながら、一般に市販されているナビゲーションシステムの地図データはそれほど精度が高いものではなく、また、道路網を交差点(ノード)を結ぶ直線状のリンクにより表現するため実際の道路の形状と一致しない場合がある。このため、マップマッチングでは自車両の位置の修正を十分に修正できないことがある。
【0006】
また、車両の走行軌跡と地図データの道路パターンを比較して、その一致度に基づき近接している道路に車両の位置を対応づける位置の補正方法が提案されている(例えば、特許文献2参照。)。特許文献2記載の補正方法では、交差点やカーブなどを走行したことを走行軌跡から検出して、該走行軌跡に一致する該交差点やカーブの地図データをパターンマッチングにより検出し、自車両の位置を補正する。
【特許文献1】特開2002−213979号公報
【特許文献2】特開平8−61968号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、一般的な交差点はリンクが互いに90度になるように設計されていることから、交差点の走行軌跡と交差点の道路形状とをパターンマッチングしたのでは、ほとんどの交差点のリンクデータと一致してしまう。したがって、走行している交差点とは全く別の交差点とマッチングしてしまう可能性がある。また、上述のようにリンクデータは直線で形成されていることが多いため、カーブの走行軌跡と一致するリンクデータを検出することは困難である。また、パターンマッチングは処理に時間がかかるためナビゲーションシステムが行う処理としては適当でない。
【0008】
本発明は、上記課題に鑑み、自律航法による測位結果を修正してより精度よく移動体の位置を測位する測位装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するため、本発明は、移動体の位置を検出するナビゲーション装置において、地図データを記憶した地図データ記憶手段と、移動体の挙動情報を検出する自律センサと、GPS等の電波航法測位手段による測位結果に自律センサによる検出情報を累積して移動体の慣性測位位置を検出する慣性測位手段と、特徴的な挙動を示した特徴的位置を検出する特徴的走行位置検出手段と、特徴的位置に基づき地図データ記憶手段を参照し、当該特徴的位置に対応する道路位置の位置情報を抽出する補正量検出手段と、特徴的位置が道路位置に近接するという条件に基づき、カルマンフィルタにより特徴的位置を補正する位置補正手段と、を有することを特徴とする。
【0010】
本発明によれば、交差点などを走行時の位置を対応する地図データ上の位置に近接するようにカルマンフィルタにより補正するので、自律航法による測位位置の誤差の大きさに応じて最適な補正を施すことができる。
【発明の効果】
【0011】
自律航法による測位結果を修正してより精度よく移動体の位置を測位する測位装置を提供することができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明を実施するための最良の形態について、図面を参照しながら説明する。
図1は、ナビゲーション装置1の概略構成図を示す。本実施の形態のナビゲーション装置10はGPS(Grobal Positioning System)衛星の捕捉が困難な状況やGPS測位の信頼性が低下した状況下で、自律航法による車両の位置を補正して精度よい測位を可能にする。ナビゲーション装置10は、GPS電波が遮断された場合、車両の挙動から交差点などを走行したことを検出し、該挙動が検出された位置に対応する交差点の地図データ上の位置に近接するように自律航法による位置を補正する。補正にはカルマンフィルタを用いるので、自律航法による測位位置の誤差の大きさに応じて最適な補正となる。このような補正により、交差点で右左折等する度に累積した誤差を縮小することができるので、GPS電波が遮断されてから長時間経過しても、精度のよい測位が可能になる。
【0013】
ナビゲーション装置1は、ナビゲーション装置1を制御するナビECU(Electrical Control Unit)10により制御される。ナビECU10は、プログラムを実行するCPU、プログラムを記憶した記憶装置(ハードディスクドライブ、ROM)、データやプログラムを一時的に記憶するRAM、データを入力及び出力する入出力装置、NV(Non Volatile)−RAM等がバスを介して接続されたコンピュータとして構成される。
【0014】
ナビECU10にはGPS衛星からの電波を受信するGPS受信装置11、走行距離、走行方向、車両のヨー、ロール、ピッチ等による進行方向に応じた信号(INS(Inertial Navigation Sensor)データ)を出力するINS装置12、地図データを記憶した地図データベース(以下、地図DBという)13、ナビゲーション装置1を操作するための入力装置14及び地図に現在位置を表示する表示装置15が接続されている。
【0015】
地図DB5は、ハードディスクやCD−ROM、DVD−ROM等で構成され、道路網や交差点などの道路地図情報が、緯度・経度に対応づけて格納されている。地図DB5には実際の道路網に対応づけて、ノード(道路と道路が交差する点、交差点から所定間隔毎に区切った点等)に関係する情報と、リンク(ノードとノードを接続する道路)に関係する情報とからなるテーブル状のデータベースに格納される。
【0016】
ノードテーブルは、ノードの番号、座標、そのノードから流出するリンク数、各リンクの方向及びそれらのリンク番号を有する。また、リンクテーブルは、リンクの番号、リンクを構成する始点ノードと終点ノード、リンク長を有する。ノード番号及びリンク番号は、互いに重複しないように定められている。したがって、ノード番号とリンク番号をそれぞれ辿ることで道路網が形成される。
【0017】
入力装置14は、タッチパネル、押下式のキーボード、ボタン、リモコン、十字キー等で構成される、運転者からの操作を入力するためのインターフェイスである。また、マイクを備え運転者の発する音声を音声認識回路で認識して操作を入力してもよい。目的地までのルート検索を行う場合、運転者は目的地を住所、地名、ランドマーク名、郵便番号等で入力することができる。
【0018】
表示装置15は、液晶や有機EL、HUD(Head Up Display)等により構成され、自車両周辺の道路地図や指定された地域の道路地図を、指定された縮尺に合わせ表示すると共に、必要に応じて、自車両の位置及び目的地までの経路等を道路地図に表示する。また、表示装置15はスピーカを備え、スピーカにより右左折する交差点など経路に沿った進行方向を音声により案内する。
【0019】
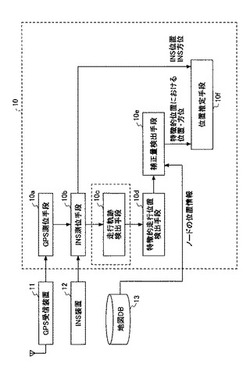
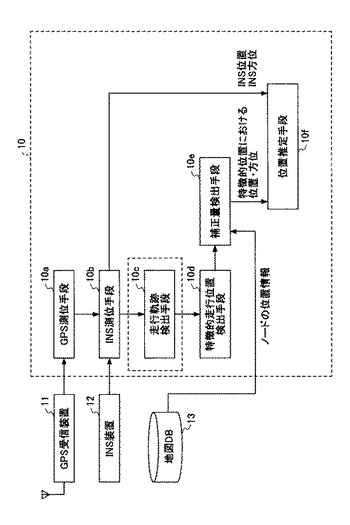
ナビECU10のCPUは、記憶装置に記憶されたプログラムを実行することで、本実施の形態で説明する測位を実現する。図2は、ナビECU10の機能ブロック図を示す。
【0020】
ナビECU10は、電波航法測位により自車両の位置を測位するGPS測位手段10a、INSデータを用いて自律航法により自車両の位置を測位するINS測位手段10b、GPS測位手段10b又はINS測位手段10bによる測位により得られた走行軌跡を検出する走行軌跡検出手段10c、自車両の挙動から交差点などの走行位置を検出する特徴的走行位置検出手段10d、地図DB13から交差点など走行位置に対応するノードの位置情報を抽出する補正量検出手段10e、及び、カルマンフィルタにより走行位置を交差点の位置に近接するよう補正する位置補正手段10f、を有する。以下、詳細に説明する。
【0021】
GPS測位手段10aは、周知の方法でGPS衛星からの電波に基づき自車両の位置を測位する。GPS測位手段10aは、GPS受信装置11が受信した複数のGPS衛星から発信される電波の到達時間に基づきGPS衛星までの距離を算出する。そして、3つのGPS衛星と自車両の距離が交差する1点を自車両の位置として測位する。GPS測位手段10aはGPS電波を受信している間は所定の時間毎に自車両の位置を測位する。
【0022】
GPS電波が遮断されると、INS測位手段10bは、INS装置12から車速、舵角、方位を検出して、それまでに計測されている位置及び方向に走行距離及び方向を累積して、自律航法による位置及び方向を推定する(以下、INS位置、INS方向という)。
【0023】
図3(a)は自律航法により検出されるINS位置とリンク及びノードの関係を示す図である。なお、図3(a)ではすでにGPS電波は遮断されている。自車両は、ノード21から22の方向にリンク24を走行しノード22で右折した。自律航法により検出された自車両のINS位置は三角形により、比較のために示した現実の位置は円形によりそれぞれ示した。リンクやノードはINS位置やINS方向に近いものを地図DB13から抽出する。図3(a)に示すように、現実の位置とINS位置、現実の方向と推定方向とは若干のズレを有する。
【0024】
なお、カルマンフィルタを適用するためにはINS位置の誤差分散を必要とするが、INS装置12の信号の誤差は速度やGPS電波遮断時間等に応じて既知であるため、これらに基づき累積したINS位置の誤差分散も既知である。
【0025】
特徴的走行位置検出手段10dは、自車両が特徴的な挙動を示した場合にこれを検出する。特徴的な挙動は、交差点、T字路等を走行した時に得られる、走行方向が短時間に変更される挙動、例えば、右左折やUターン等、約90度以上の方向変化量を示す挙動である。
【0026】
特徴的走行位置検出手段10dは、例えば、車両がウィンカを出した状態で、所定以上のヨーレートが検出された場合に特徴的な挙動があったと検出する。ウィンカが出されたことで右又は左方向に比較的大きな方向変化があることが予測され、所定以上のヨーレートが検出されることで実際に方向変化があったことが検出できる。図3(a)では特徴的走行位置検出手段10dが特徴的な走行を検出した位置を特徴的位置31で示した。
【0027】
なお、特徴的位置31は走行軌跡から求めてもよい。この場合、特徴的走行位置検出手段10dの前に、走行軌跡検出手段10cが走行軌跡を検出する。走行軌跡検出手段10cは、所定距離(例えば2m)毎の方向をINS装置12から取得する。
【0028】
特徴的走行位置検出手段10dは、走行軌跡を構成する所定距離毎の方向変化量Δθに基づき、自車両が特徴的な走行軌跡を走行した場合にこれを検出する。なお、長時間走行すれば徐々に90度以上の方向変化量が生じるので、所定走行距離以内で約90度以上の方向変化量が検出された場合に、自車両が特徴的な走行軌跡で走行したことを検出する。
【0029】
特徴点が検出されると補正量検出手段10eは、地図DB13から特徴的位置に対応するノードの位置情報を抽出する。対応するノードは例えば特徴的位置に最も近いノードである。
【0030】
特徴的位置31に対応するノードの位置情報が抽出されれば、ノードと特徴的位置31の距離及びその方位が検出されるが、理想的にはノードと特徴的位置31とは一致すべきものである。
【0031】
そこで、本実施形態のナビゲーション装置1は、このノードと特徴的位置31とが近接するようにINS位置を補正する。すなわち、「特徴的位置31は交差点と近接する」という条件を下に観測方程式を立て、カルマンフィルタによりINS位置を補正する。
【0032】
補正量検出手段10eは、
・特徴的位置31の位置情報(INS位置)
・ノードの位置と特徴的位置31の距離d及びその方位α
を位置補正手段10fに送出する。これらがカルマンフィルタに入力する観測量になる。
【0033】
図3(b)は、特徴的位置31をノードに近接させた場合のINS位置とリンク及びノードの関係を示す図である。位置補正手段10fは、カルマンフィルタによりノードの位置と特徴的位置31の距離dがゼロになるように特徴点位置31を補正する。カルマンフィルタにより、距離dが大きくてもそれがゼロになるように補正することができ、かつ、INS位置の誤差が大きくても誤差に応じた推定を行うので、特徴的位置31を最も確からしい位置を補正することができる。
【0034】
また、位置補正手段10fには、INS測位手段10bが測位した、特徴的位置31の前後のINS位置とINS方向とが入力されるので、特徴的位置31の補正量及び方向と同様にINS位置とINS方向を補正する。図3(b)では、特徴的位置31をノードに近接させたことに伴い、特徴的位置31の前後のINS位置を特徴点位置31と同様の距離及び方向に補正している。
【0035】
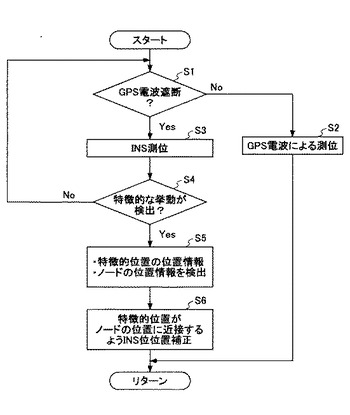
図4は、ナビゲーション装置1が自律航法及び特徴的位置を利用して自車両の位置を補正する手順を示すフローチャート図である。
【0036】
GPS測位手段10aは測位間隔毎にGPS電波が遮断されたか否かを判定する(S1)。GPS電波が遮断されていなければ(S1のNo)、GPS電波を利用して測位した位置が自車両の位置となる(S2)。
【0037】
GPS電波が遮断された場合(S1のYes)、INS測位手段10bはGPSによる測位位置、方向に、車速センサによる走行距離、INS装置12による走行方向を累積して自律航法によるINS位置及びINS方向を検出する(S3)。
【0038】
INS位置及びINS方向を検出しながら、特徴的走行位置検出手段10dは、自車両が特徴的な挙動を示した否かを判定する(S4)。すなわち、例えば、車両がウィンカを出した状態で、所定以上のヨーレートが検出されたか否かを判定する。特徴的な挙動が検出されない場合、ステップS1からの処理を繰り返す。
【0039】
特徴的な挙動が検出された場合(S4のYes)、補正量検出手段10eは特徴的位置31の位置情報をINS測位から検出すると共に、特徴的位置31に最寄りのノードの位置情報を地図DB13から検出する(S5)。
【0040】
位置補正手段10fは、特徴的位置31がノードの位置に近接するという条件の下カルマンフィルタにより特徴的位置31を補正する。そして、位置補正手段10fは、他のINS位置を特徴的位置31と同様に補正する(S5)。
【0041】
図5は、本実施形態のナビゲーション装置1による実際の測位結果を示す図である。図5の測位結果は、GPS電波が約350秒間遮断された間の測位結果である。細い実線は地図DB13から抽出した道路形状を、大きな黒丸は交差点を示す。また、三角形はINS位置を、四角形は特徴的位置に基づき補正した補正後の自車両の位置をそれぞれ示す。
【0042】
INS位置により特徴的位置31が検出されるので、補正量検出手段10eはその近くの交差点32の位置情報を地図DB13から抽出する。そして、位置補正手段10fは、特徴的位置31が交差点32に近接するように特徴的位置31の位置を補正し、前後のINS装置を同様に補正する。図5に示すように、GPS電波が遮断されてから時間が経過するほど真の位置(例えば、地図DB13の道路形状)とのズレが大きくなるINS位置を精度よく補正することができる。
【0043】
本実施携帯のナビゲーション装置によれば、カルマンフィルタによりノードの位置と特徴的位置31の距離dがゼロになるように補正することで、交差点で右左折等する度に、自律航法によるINS位置及びINS方向を最も確からしい位置・方向に補正することができる。
【図面の簡単な説明】
【0044】
【図1】ナビゲーション装置の概略構成図である。
【図2】ナビECUの機能ブロック図である。
【図3】自律航法により検出されるINS位置とリンク及びノードの関係を示す図である。
【図4】ナビゲーション装置が特徴的位置を利用して自車両の位置を補正する手順を示すフローチャート図である。
【図5】ナビゲーション装置による実際の測位結果を示す図である。
【符号の説明】
【0045】
1 ナビゲーション装置
11 GPS受信装置
12 INS装置
13 地図DB
14 入力装置
15 表示装置
【技術分野】
【0001】
本発明は移動体の位置を検出するナビゲーション装置に関し、特に、自律航法により測位された移動体の位置を精度よく補正するナビゲーション装置に関する。
【背景技術】
【0002】
ナビゲーションシステムでは、GPS(Grobal Positioning System)衛星からの電波に基づき自車両の位置を測位して、車速センサ及びジャイロセンサ等を用いて走行距離及び走行方向を累積しながら車両の現在位置を精度よく推定する。
【0003】
しかしながら、GPS衛星からの電波を受信できない状態では、自律航法による測位に含まれる誤差が時間と共に増幅されるため徐々に位置の精度が低下する。
【0004】
このため、自律航法により測位した自車両の位置を補正する種々の方法が提案されている。例えば、マップマッチングでは、ナビゲーションシステムの地図データを利用して自律航法により測位した位置を補正する(例えば、特許文献1参照。)。特許文献1では、自律航法により測位された位置・方向に最も整合する位置及び方位を有する道路を地図データから選択して、該道路に対応づけて位置・方向を補正する方法が提案されている。
【0005】
しかしながら、一般に市販されているナビゲーションシステムの地図データはそれほど精度が高いものではなく、また、道路網を交差点(ノード)を結ぶ直線状のリンクにより表現するため実際の道路の形状と一致しない場合がある。このため、マップマッチングでは自車両の位置の修正を十分に修正できないことがある。
【0006】
また、車両の走行軌跡と地図データの道路パターンを比較して、その一致度に基づき近接している道路に車両の位置を対応づける位置の補正方法が提案されている(例えば、特許文献2参照。)。特許文献2記載の補正方法では、交差点やカーブなどを走行したことを走行軌跡から検出して、該走行軌跡に一致する該交差点やカーブの地図データをパターンマッチングにより検出し、自車両の位置を補正する。
【特許文献1】特開2002−213979号公報
【特許文献2】特開平8−61968号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、一般的な交差点はリンクが互いに90度になるように設計されていることから、交差点の走行軌跡と交差点の道路形状とをパターンマッチングしたのでは、ほとんどの交差点のリンクデータと一致してしまう。したがって、走行している交差点とは全く別の交差点とマッチングしてしまう可能性がある。また、上述のようにリンクデータは直線で形成されていることが多いため、カーブの走行軌跡と一致するリンクデータを検出することは困難である。また、パターンマッチングは処理に時間がかかるためナビゲーションシステムが行う処理としては適当でない。
【0008】
本発明は、上記課題に鑑み、自律航法による測位結果を修正してより精度よく移動体の位置を測位する測位装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するため、本発明は、移動体の位置を検出するナビゲーション装置において、地図データを記憶した地図データ記憶手段と、移動体の挙動情報を検出する自律センサと、GPS等の電波航法測位手段による測位結果に自律センサによる検出情報を累積して移動体の慣性測位位置を検出する慣性測位手段と、特徴的な挙動を示した特徴的位置を検出する特徴的走行位置検出手段と、特徴的位置に基づき地図データ記憶手段を参照し、当該特徴的位置に対応する道路位置の位置情報を抽出する補正量検出手段と、特徴的位置が道路位置に近接するという条件に基づき、カルマンフィルタにより特徴的位置を補正する位置補正手段と、を有することを特徴とする。
【0010】
本発明によれば、交差点などを走行時の位置を対応する地図データ上の位置に近接するようにカルマンフィルタにより補正するので、自律航法による測位位置の誤差の大きさに応じて最適な補正を施すことができる。
【発明の効果】
【0011】
自律航法による測位結果を修正してより精度よく移動体の位置を測位する測位装置を提供することができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明を実施するための最良の形態について、図面を参照しながら説明する。
図1は、ナビゲーション装置1の概略構成図を示す。本実施の形態のナビゲーション装置10はGPS(Grobal Positioning System)衛星の捕捉が困難な状況やGPS測位の信頼性が低下した状況下で、自律航法による車両の位置を補正して精度よい測位を可能にする。ナビゲーション装置10は、GPS電波が遮断された場合、車両の挙動から交差点などを走行したことを検出し、該挙動が検出された位置に対応する交差点の地図データ上の位置に近接するように自律航法による位置を補正する。補正にはカルマンフィルタを用いるので、自律航法による測位位置の誤差の大きさに応じて最適な補正となる。このような補正により、交差点で右左折等する度に累積した誤差を縮小することができるので、GPS電波が遮断されてから長時間経過しても、精度のよい測位が可能になる。
【0013】
ナビゲーション装置1は、ナビゲーション装置1を制御するナビECU(Electrical Control Unit)10により制御される。ナビECU10は、プログラムを実行するCPU、プログラムを記憶した記憶装置(ハードディスクドライブ、ROM)、データやプログラムを一時的に記憶するRAM、データを入力及び出力する入出力装置、NV(Non Volatile)−RAM等がバスを介して接続されたコンピュータとして構成される。
【0014】
ナビECU10にはGPS衛星からの電波を受信するGPS受信装置11、走行距離、走行方向、車両のヨー、ロール、ピッチ等による進行方向に応じた信号(INS(Inertial Navigation Sensor)データ)を出力するINS装置12、地図データを記憶した地図データベース(以下、地図DBという)13、ナビゲーション装置1を操作するための入力装置14及び地図に現在位置を表示する表示装置15が接続されている。
【0015】
地図DB5は、ハードディスクやCD−ROM、DVD−ROM等で構成され、道路網や交差点などの道路地図情報が、緯度・経度に対応づけて格納されている。地図DB5には実際の道路網に対応づけて、ノード(道路と道路が交差する点、交差点から所定間隔毎に区切った点等)に関係する情報と、リンク(ノードとノードを接続する道路)に関係する情報とからなるテーブル状のデータベースに格納される。
【0016】
ノードテーブルは、ノードの番号、座標、そのノードから流出するリンク数、各リンクの方向及びそれらのリンク番号を有する。また、リンクテーブルは、リンクの番号、リンクを構成する始点ノードと終点ノード、リンク長を有する。ノード番号及びリンク番号は、互いに重複しないように定められている。したがって、ノード番号とリンク番号をそれぞれ辿ることで道路網が形成される。
【0017】
入力装置14は、タッチパネル、押下式のキーボード、ボタン、リモコン、十字キー等で構成される、運転者からの操作を入力するためのインターフェイスである。また、マイクを備え運転者の発する音声を音声認識回路で認識して操作を入力してもよい。目的地までのルート検索を行う場合、運転者は目的地を住所、地名、ランドマーク名、郵便番号等で入力することができる。
【0018】
表示装置15は、液晶や有機EL、HUD(Head Up Display)等により構成され、自車両周辺の道路地図や指定された地域の道路地図を、指定された縮尺に合わせ表示すると共に、必要に応じて、自車両の位置及び目的地までの経路等を道路地図に表示する。また、表示装置15はスピーカを備え、スピーカにより右左折する交差点など経路に沿った進行方向を音声により案内する。
【0019】
ナビECU10のCPUは、記憶装置に記憶されたプログラムを実行することで、本実施の形態で説明する測位を実現する。図2は、ナビECU10の機能ブロック図を示す。
【0020】
ナビECU10は、電波航法測位により自車両の位置を測位するGPS測位手段10a、INSデータを用いて自律航法により自車両の位置を測位するINS測位手段10b、GPS測位手段10b又はINS測位手段10bによる測位により得られた走行軌跡を検出する走行軌跡検出手段10c、自車両の挙動から交差点などの走行位置を検出する特徴的走行位置検出手段10d、地図DB13から交差点など走行位置に対応するノードの位置情報を抽出する補正量検出手段10e、及び、カルマンフィルタにより走行位置を交差点の位置に近接するよう補正する位置補正手段10f、を有する。以下、詳細に説明する。
【0021】
GPS測位手段10aは、周知の方法でGPS衛星からの電波に基づき自車両の位置を測位する。GPS測位手段10aは、GPS受信装置11が受信した複数のGPS衛星から発信される電波の到達時間に基づきGPS衛星までの距離を算出する。そして、3つのGPS衛星と自車両の距離が交差する1点を自車両の位置として測位する。GPS測位手段10aはGPS電波を受信している間は所定の時間毎に自車両の位置を測位する。
【0022】
GPS電波が遮断されると、INS測位手段10bは、INS装置12から車速、舵角、方位を検出して、それまでに計測されている位置及び方向に走行距離及び方向を累積して、自律航法による位置及び方向を推定する(以下、INS位置、INS方向という)。
【0023】
図3(a)は自律航法により検出されるINS位置とリンク及びノードの関係を示す図である。なお、図3(a)ではすでにGPS電波は遮断されている。自車両は、ノード21から22の方向にリンク24を走行しノード22で右折した。自律航法により検出された自車両のINS位置は三角形により、比較のために示した現実の位置は円形によりそれぞれ示した。リンクやノードはINS位置やINS方向に近いものを地図DB13から抽出する。図3(a)に示すように、現実の位置とINS位置、現実の方向と推定方向とは若干のズレを有する。
【0024】
なお、カルマンフィルタを適用するためにはINS位置の誤差分散を必要とするが、INS装置12の信号の誤差は速度やGPS電波遮断時間等に応じて既知であるため、これらに基づき累積したINS位置の誤差分散も既知である。
【0025】
特徴的走行位置検出手段10dは、自車両が特徴的な挙動を示した場合にこれを検出する。特徴的な挙動は、交差点、T字路等を走行した時に得られる、走行方向が短時間に変更される挙動、例えば、右左折やUターン等、約90度以上の方向変化量を示す挙動である。
【0026】
特徴的走行位置検出手段10dは、例えば、車両がウィンカを出した状態で、所定以上のヨーレートが検出された場合に特徴的な挙動があったと検出する。ウィンカが出されたことで右又は左方向に比較的大きな方向変化があることが予測され、所定以上のヨーレートが検出されることで実際に方向変化があったことが検出できる。図3(a)では特徴的走行位置検出手段10dが特徴的な走行を検出した位置を特徴的位置31で示した。
【0027】
なお、特徴的位置31は走行軌跡から求めてもよい。この場合、特徴的走行位置検出手段10dの前に、走行軌跡検出手段10cが走行軌跡を検出する。走行軌跡検出手段10cは、所定距離(例えば2m)毎の方向をINS装置12から取得する。
【0028】
特徴的走行位置検出手段10dは、走行軌跡を構成する所定距離毎の方向変化量Δθに基づき、自車両が特徴的な走行軌跡を走行した場合にこれを検出する。なお、長時間走行すれば徐々に90度以上の方向変化量が生じるので、所定走行距離以内で約90度以上の方向変化量が検出された場合に、自車両が特徴的な走行軌跡で走行したことを検出する。
【0029】
特徴点が検出されると補正量検出手段10eは、地図DB13から特徴的位置に対応するノードの位置情報を抽出する。対応するノードは例えば特徴的位置に最も近いノードである。
【0030】
特徴的位置31に対応するノードの位置情報が抽出されれば、ノードと特徴的位置31の距離及びその方位が検出されるが、理想的にはノードと特徴的位置31とは一致すべきものである。
【0031】
そこで、本実施形態のナビゲーション装置1は、このノードと特徴的位置31とが近接するようにINS位置を補正する。すなわち、「特徴的位置31は交差点と近接する」という条件を下に観測方程式を立て、カルマンフィルタによりINS位置を補正する。
【0032】
補正量検出手段10eは、
・特徴的位置31の位置情報(INS位置)
・ノードの位置と特徴的位置31の距離d及びその方位α
を位置補正手段10fに送出する。これらがカルマンフィルタに入力する観測量になる。
【0033】
図3(b)は、特徴的位置31をノードに近接させた場合のINS位置とリンク及びノードの関係を示す図である。位置補正手段10fは、カルマンフィルタによりノードの位置と特徴的位置31の距離dがゼロになるように特徴点位置31を補正する。カルマンフィルタにより、距離dが大きくてもそれがゼロになるように補正することができ、かつ、INS位置の誤差が大きくても誤差に応じた推定を行うので、特徴的位置31を最も確からしい位置を補正することができる。
【0034】
また、位置補正手段10fには、INS測位手段10bが測位した、特徴的位置31の前後のINS位置とINS方向とが入力されるので、特徴的位置31の補正量及び方向と同様にINS位置とINS方向を補正する。図3(b)では、特徴的位置31をノードに近接させたことに伴い、特徴的位置31の前後のINS位置を特徴点位置31と同様の距離及び方向に補正している。
【0035】
図4は、ナビゲーション装置1が自律航法及び特徴的位置を利用して自車両の位置を補正する手順を示すフローチャート図である。
【0036】
GPS測位手段10aは測位間隔毎にGPS電波が遮断されたか否かを判定する(S1)。GPS電波が遮断されていなければ(S1のNo)、GPS電波を利用して測位した位置が自車両の位置となる(S2)。
【0037】
GPS電波が遮断された場合(S1のYes)、INS測位手段10bはGPSによる測位位置、方向に、車速センサによる走行距離、INS装置12による走行方向を累積して自律航法によるINS位置及びINS方向を検出する(S3)。
【0038】
INS位置及びINS方向を検出しながら、特徴的走行位置検出手段10dは、自車両が特徴的な挙動を示した否かを判定する(S4)。すなわち、例えば、車両がウィンカを出した状態で、所定以上のヨーレートが検出されたか否かを判定する。特徴的な挙動が検出されない場合、ステップS1からの処理を繰り返す。
【0039】
特徴的な挙動が検出された場合(S4のYes)、補正量検出手段10eは特徴的位置31の位置情報をINS測位から検出すると共に、特徴的位置31に最寄りのノードの位置情報を地図DB13から検出する(S5)。
【0040】
位置補正手段10fは、特徴的位置31がノードの位置に近接するという条件の下カルマンフィルタにより特徴的位置31を補正する。そして、位置補正手段10fは、他のINS位置を特徴的位置31と同様に補正する(S5)。
【0041】
図5は、本実施形態のナビゲーション装置1による実際の測位結果を示す図である。図5の測位結果は、GPS電波が約350秒間遮断された間の測位結果である。細い実線は地図DB13から抽出した道路形状を、大きな黒丸は交差点を示す。また、三角形はINS位置を、四角形は特徴的位置に基づき補正した補正後の自車両の位置をそれぞれ示す。
【0042】
INS位置により特徴的位置31が検出されるので、補正量検出手段10eはその近くの交差点32の位置情報を地図DB13から抽出する。そして、位置補正手段10fは、特徴的位置31が交差点32に近接するように特徴的位置31の位置を補正し、前後のINS装置を同様に補正する。図5に示すように、GPS電波が遮断されてから時間が経過するほど真の位置(例えば、地図DB13の道路形状)とのズレが大きくなるINS位置を精度よく補正することができる。
【0043】
本実施携帯のナビゲーション装置によれば、カルマンフィルタによりノードの位置と特徴的位置31の距離dがゼロになるように補正することで、交差点で右左折等する度に、自律航法によるINS位置及びINS方向を最も確からしい位置・方向に補正することができる。
【図面の簡単な説明】
【0044】
【図1】ナビゲーション装置の概略構成図である。
【図2】ナビECUの機能ブロック図である。
【図3】自律航法により検出されるINS位置とリンク及びノードの関係を示す図である。
【図4】ナビゲーション装置が特徴的位置を利用して自車両の位置を補正する手順を示すフローチャート図である。
【図5】ナビゲーション装置による実際の測位結果を示す図である。
【符号の説明】
【0045】
1 ナビゲーション装置
11 GPS受信装置
12 INS装置
13 地図DB
14 入力装置
15 表示装置
【特許請求の範囲】
【請求項1】
移動体の位置を検出するナビゲーション装置において、
地図データを記憶した地図データ記憶手段と、
移動体の挙動情報を検出する自律センサと、
GPS等の電波航法測位手段による測位結果に前記自律センサによる検出情報を累積して前記移動体の慣性測位位置を検出する慣性測位手段と、
特徴的な挙動を示した特徴的位置を検出する特徴的走行位置検出手段と、
前記特徴的位置に基づき前記地図データ記憶手段を参照し、当該特徴的位置に対応する道路位置の位置情報を抽出する補正量検出手段と、
前記特徴的位置が前記道路位置に近接するという条件に基づき、カルマンフィルタにより前記特徴的位置を補正する位置補正手段と、
を有することを特徴とするナビゲーション装置。
【請求項1】
移動体の位置を検出するナビゲーション装置において、
地図データを記憶した地図データ記憶手段と、
移動体の挙動情報を検出する自律センサと、
GPS等の電波航法測位手段による測位結果に前記自律センサによる検出情報を累積して前記移動体の慣性測位位置を検出する慣性測位手段と、
特徴的な挙動を示した特徴的位置を検出する特徴的走行位置検出手段と、
前記特徴的位置に基づき前記地図データ記憶手段を参照し、当該特徴的位置に対応する道路位置の位置情報を抽出する補正量検出手段と、
前記特徴的位置が前記道路位置に近接するという条件に基づき、カルマンフィルタにより前記特徴的位置を補正する位置補正手段と、
を有することを特徴とするナビゲーション装置。
【図1】



【図2】
【図3】

【図4】
【図5】

【図2】
【図3】
【図4】
【図5】
【公開番号】特開2008−20307(P2008−20307A)
【公開日】平成20年1月31日(2008.1.31)
【国際特許分類】
【出願番号】特願2006−192048(P2006−192048)
【出願日】平成18年7月12日(2006.7.12)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.INS
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成20年1月31日(2008.1.31)
【国際特許分類】
【出願日】平成18年7月12日(2006.7.12)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.INS
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]