
ナビゲーション装置、制御方法及びプログラム
【課題】実際の道路の状況を反映し、且つ、自車両の位置をユーザに容易に把握させることが可能なナビゲーション装置を提供する。
【解決手段】道路を含む地図データを記憶する記憶部(1)と、自車両の位置を検出する検出部(2)と、記憶部(1)に記憶された地図データと検出部(2)で検出した自車両の位置とを基に、自車両が走行している道路の画像を表示部(4)に表示する制御部(7)と、を有して構成し、制御部(7)は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に自車両が到達した場合は、その自車両が走行している道路の画像を、自車両が視認可能な視点から見た道路の画像に切り替えて表示部(4)に表示する。
【解決手段】道路を含む地図データを記憶する記憶部(1)と、自車両の位置を検出する検出部(2)と、記憶部(1)に記憶された地図データと検出部(2)で検出した自車両の位置とを基に、自車両が走行している道路の画像を表示部(4)に表示する制御部(7)と、を有して構成し、制御部(7)は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に自車両が到達した場合は、その自車両が走行している道路の画像を、自車両が視認可能な視点から見た道路の画像に切り替えて表示部(4)に表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、目的地に至る道路を案内するナビゲーション装置の技術に関する。
【背景技術】
【0002】
近年、実際の道路の映像を模した3次元画像を表示するナビゲーション装置がある。また、ルートの状況に応じて2次元画像と3次元画像とを自動的に切り替えて表示する技術もある(例えば、特許文献1:特開2005-292064号公報、特許文献2:特開平9-304106号公報参照)。
【0003】
しかし、例えば、地上道路と高架道路との関係のように、上方の視点から道路を見た際に上下に重なる位置関係となる道路の場合は、双方の道路が重ねられた状態で表示部に表示され、その重ねられた道路上に自車両位置マーク(自車両を特定するためのマーク)が表示されてしまう。このため、ユーザは、自車両位置マークを確認しても、自車両が上下どちらの道路を走行しているか判別し難いことになる。
【0004】
このようなことから、例えば、特許文献3(特開2009-264819号公報)には、自車両が目的地に至る道路に含まれる交差点を通過する際に、その交差点の上方に高架設備が存在する場合であっても、わかりやすい誘導情報を表示する技術について開示されている。
【0005】
上記特許文献3では、自車両が通過する交差点に対応づけられた誘導区間を含む判断領域の上方に高架設備が存在するか否かを判断し、判断領域の上方に高架設備が存在すると判断した場合は、その交差点の誘導区間を上方の視点から見た三次元動画像データから高架設備の画像が除かれた誘導動画像データを含む誘導情報を表示することにしている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−292064号公報
【特許文献2】特開平9−304106号公報
【特許文献2】特開2009−264819号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記特許文献3の発明は、自車両が走行している道路を把握することができる。しかし、上記特許文献3の発明は、高架設備が存在する場合は、その高架設備の画像を取り除いてしまうため、高架設備の画像が取り除かれた誘導動画像データは、実際の道路の状況と異なって表示されてしまう。このため、ユーザは、誘導動画像データが実際の道路の状況と異なると、その誘導動画像データを見ても、瞬時に実際の道路の状況を把握することができなくなることが多い。
【0008】
本発明は、上記事情に鑑みてなされたものであり、実際の道路の状況を反映し、且つ、自車両の位置をユーザに容易に把握させることが可能なナビゲーション装置、制御方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
かかる目的を達成するために、本発明は、以下の特徴を有することとする。
【0010】
<ナビゲーション装置>
本発明にかかるナビゲーション装置は、
道路を含む地図データを記憶する記憶手段と、
自車両の位置を検出する検出手段と、
前記地図データと前記自車両の位置とを基に、前記自車両が走行している道路の画像を表示手段に表示する制御手段と、を有し、
前記制御手段は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に前記自車両が到達した場合は、前記自車両が走行している前記道路の画像を、前記自車両が視認可能な視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とする。
【0011】
<制御方法>
本発明にかかる制御方法は、
道路を含む地図データを記憶する記憶手段を有するナビゲーション装置で行う制御方法であって、
自車両の位置を検出する検出工程と、
前記地図データと前記自車両の位置とを基に、前記自車両が走行している道路の画像を表示手段に表示する制御工程と、を有し、
前記制御工程は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に前記自車両が到達した場合は、前記自車両が走行している前記道路の画像を、前記自車両が視認可能な視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とする。
【0012】
<プログラム>
本発明にかかるプログラムは、
道路を含む地図データを記憶する記憶手段を有するナビゲーション装置のコンピュータに実行させるプログラムであって、
自車両の位置を検出する検出処理と、
前記地図データと前記自車両の位置とを基に、前記自車両が走行している道路を表示手段に表示する制御処理と、を前記コンピュータに実行させ、
前記制御処理は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に前記自車両が到達した場合は、前記自車両が走行している前記道路の画像を、前記自車両が視認可能な視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とする。
【発明の効果】
【0013】
本発明によれば、実際の道路の状況を反映し、且つ、自車両の位置をユーザに容易に把握させることができる。
【図面の簡単な説明】
【0014】
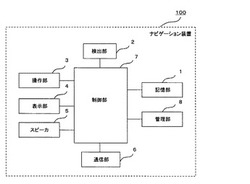
【図1】本実施形態のナビゲーション装置100の構成例を示す図である。
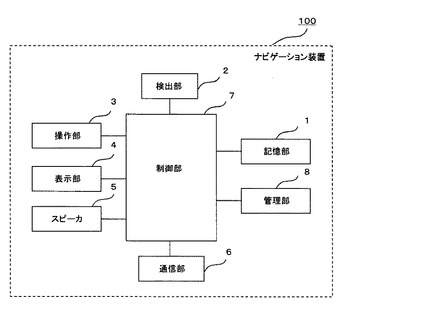
【図2】管理部8で管理するテーブル構成例を示す図である。
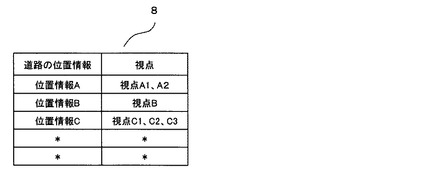
【図3】第1の実施形態のナビゲーション装置100の処理動作例を示す図である。
【図4】ナビゲーション装置100の具体的な処理動作例を説明するための第1の図である。
【図5】ナビゲーション装置100の具体的な処理動作例を説明するための第2の図である。
【図6】道路の3次元画像の表示例を説明するための図である。
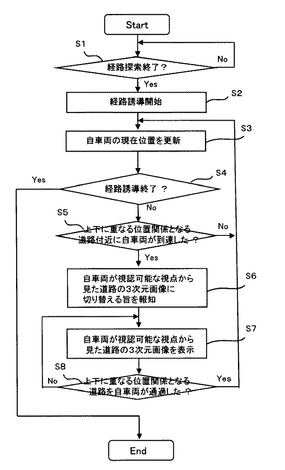
【図7】第2の実施形態のナビゲーション装置100の処理動作例を示す図である。
【発明を実施するための形態】
【0015】
<本実施形態のナビゲーション装置100の概要>
まず、図1、図2を参照しながら、本実施形態のナビゲーション装置100の概要について説明する。
【0016】
本実施形態のナビゲーション装置100は、道路を含む地図データを記憶する記憶部1と、自車両の位置を検出する検出部2と、記憶部1に記憶された地図データと検出部2で検出した自車両の位置とを基に、自車両が走行している道路の画像を表示部4に表示する制御部7と、を有して構成する。
【0017】
本実施形態の制御部7は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に自車両が到達した場合は、その自車両が走行している道路の画像を、自車両が視認可能な視点から見た道路の画像に切り替えて表示部4に表示する。
【0018】
具体的には、本実施形態のナビゲーション装置100は、図2に示すように、上方の視点から道路を見た際に上下に重なる位置関係となる『道路の位置情報』と、その道路の画像を表示部4に表示する際に使用する少なくとも1つの『視点』と、を対応付けて管理する管理部8を有し、制御部7は、記憶部1に記憶されている地図データと、検出部2で検出した自車両の位置と、管理部8で管理している道路の位置情報と、を基に、検出部2で検出した自車両の位置が管理部8で管理している道路の位置情報に該当する場合に、上下に重なる位置関係となる道路付近に自車両が到達したと判断し、その道路の位置情報に対応付けられた視点から見た道路の画像に切り替えて表示部4に表示する。これにより、本実施形態のナビゲーション装置100は、実際の道路の状況を反映し、且つ、自車両の位置をユーザに容易に把握させることができる。以下、添付図面を参照しながら、本実施形態のナビゲーション装置100について詳細に説明する。
【0019】
<ナビゲーション装置100の構成例>
まず、図1を参照しながら、本実施形態のナビゲーション装置100の構成例について説明する。
【0020】
本実施形態のナビゲーション装置100は、記憶部1と、検出部2と、操作部3と、表示部4と、スピーカ5と、通信部6と、制御部7と、管理部8と、を有して構成する。
【0021】
記憶部1は、各種情報を記憶するものであり、HDD、ROM、RAMなどで構成する。記憶部1には、例えば、地図表示や経路検索などに必要な道路を含む地図データなどを記憶する。地図データは、1/12500、1/25000、1/50000、1/100000などの縮尺レベルに応じて適当な大きさの緯度幅及び経度幅に区切られており、道路などは緯度及び経度で表現された頂点(ノード)の座標集合として記憶する。道路は、2以上のノードの連結からなり、2つのノードを連結した部分をリンクという。地図データは、複数のレイヤで構成する。レイヤとしては、例えば、道路レイヤ、背景レイヤ、文字・記号レイヤなどが挙げられる。
【0022】
道路レイヤは、道路リスト、ノードテーブル、交差点構成ノードリストなどで構成する。背景レイヤは、地図画面上に道路、建築物、公園、河川などを表示するためのものである。文字・記号レイヤは、市区町村名などの行政区画名、道路名、交差点名などの文字や地図記号などを表示するためのものである。
【0023】
また、地図データには、建築物等を3次元表示するためのポリゴンデータが含まれている。このポリゴンデータにより描画される3次元ポリゴンモデルに対し、テクスチャ処理又は実際の建築物の画像を張り付けることで、リアル感のある3次元地図画像を描画することができる。
【0024】
検出部2は、自車両の現在位置及び自車両の向きなどを検出するものであり、GPS受信部、自立航法センサなどを有して構成する。GPS受信部は、GPS衛星から送られてくるGPS信号を受信して自車両の現在位置(緯度・経度)を検出する。自立航法センサは、自車両の相対位置を測定するセンサであり、自車両の方位角度を検出するジャイロセンサ、自車両の走行距離を検出する車速センサ、自車両の後進を検出するリバースセンサなどで構成する。なお、検出部2の構成は特に限定せず、自車両の現在位置及び自車両の向きを検出することが可能であれば、あらゆる機能を有して構成しても良い。
【0025】
操作部3は、ナビゲーション装置100を操作するためのものであり、各種の操作ボタンなどを設けて構成する。
【0026】
表示部4は、各種情報を表示するものであり、液晶パネルなどで構成する。本実施形態のナビゲーション装置100は、自車両の現在位置の周囲の地図画像を表示部4に表示したり、出発地から目的地までの誘導経路や自車両位置マーク及びその他の案内情報を表示部4に表示したりする。
【0027】
スピーカ5は、音声によりユーザに案内情報を提供する。
【0028】
通信部6は、マルチホップで他車両との間で無線通信を行い、他車両の状態(現在位置、移動速度、移動方向など)を特定するための他車両データを取得する。また、通信部6は、VICSセンタから光ビーコンや電波ビーコンなどを介して提供される交通情報を受信する。また、通信部6は、周辺の信号機との間で無線通信を行い、信号機の状態(信号機の点灯色など)を特定するための信号機データを取得する。
【0029】
制御部7は、ナビゲーション装置100を制御するものである。制御部7は、記憶部1から所定の範囲の地図データを読み出し、該読み出した地図データと、検出部2で検出した自車両の現在位置及び自車両の向きと、を用いて操作部3などから設定された探索条件で出発地から目的地までの誘導経路を探索するなどの種々の処理を行う。制御部7で検索した誘導経路は記憶部1に記憶する。なお、記憶部1には、制御部7によって探索された誘導経路の全ノードが出発地から目的地まで記憶される。また、制御部7は、記憶部1に記憶した誘導経路を描画する。なお、制御部7は、記憶部1から誘導経路情報(ノード列)を読み出し、他の道路とは異なる色及び太さで誘導経路を描画する。
【0030】
また、制御部7は、記憶部1から読み出した地図データを用いて地図画像を描画する。また、動作状況に応じた各種メニュー画面(操作画面)や自車両位置マーク及びカーソル等の各種マークを描画する。そして、地図画像に対し、各種マークや操作画面、又は誘導経路などを重ね合わせて表示部4に表示する。また、制御部7は、スピーカ5から音声により案内情報を報知するように制御する。
【0031】
管理部8は、図2に示すように、上方の視点から道路を見た際に上下に重なる位置関係となる『道路の位置情報』と、その道路の3次元画像を表示部4に表示する際に使用する『視点』と、を対応付けて管理する。上方の視点から道路を見た際に上下に重なる位置関係となる道路としては、例えば、地上道路と高架道路との関係がある道路、螺旋を描くようなループ橋となっている道路などが挙げられる。
【0032】
本実施形態の制御部7は、検出部2で検出した自車両の現在位置及び自車両の向きを基に、記憶部1から自車両の現在位置の周囲の地域の地図データを読み出す。そして、記憶部1から読み出した地図データを基に地図画像を生成し、自車両の現在位置の周囲の地図画像を表示部4に表示する。また、制御部7は、地図画像上の道路に自車両の現在位置を示す自車両位置マークを重ね合わせて表示し、自車両の移動に伴って地図画像上の自車両位置マ
ークを移動したり、地図画像をスクロールしたりする。
【0033】
また、ユーザが操作部3を操作して目的地を設定すると、制御部7は、自車両の現在位置を出発地とし、予め設定された条件で出発地から目的地までの経路を探索し、探索により得られた経路を記憶部1に記憶する。そして、制御部7は、自車両の走行に伴って適宜案内情報を出力し、自車両を目的地まで経路に沿って走行するように案内する。
【0034】
また、制御部7は、記憶部1から読み出した地図データと、検出部2で検出した自車両の現在位置及び自車両の向きと、管理部8で管理している道路の位置情報と、を基に、自車両が上下に重なる位置関係となる道路付近に到達したか否かを判断し、自車両が上下に重なる位置関係となる道路付近に到達した場合は、その道路の位置情報に対応付けられた視点から見た道路の3次元画像を描画し、その描画した道路の3次元画像を表示部4に表示する。これにより、制御部7は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に自車両が到達した場合は、その自車両が走行している道路を、自車両が視認可能な視点から見た道路の3次元画像に切り替えて表示部4に表示することができる。
【0035】
<ナビゲーション装置100の処理動作例>
次に、図3を参照しながら、本実施形態のナビゲーション装置100の処理動作例について説明する。
【0036】
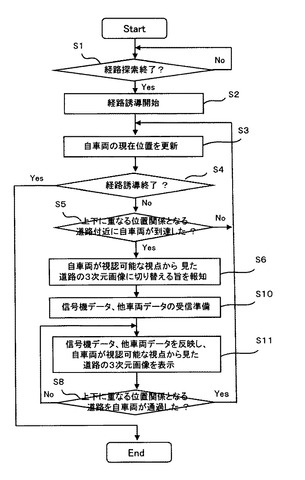
制御部7は、操作部3などから目的地が入力され、検出部2で検出した自車両の現在位置及び自車両の向きを基に、記億部1に記憶されている地図データを参照し、自車両から目的地に至る経路の探索処理が終了したか否かを判断する(ステップS1)。また、制御部7は、記憶部1から自車両の現在位置の周囲の地域の地図データを読み出し、その読み出した地図データを基に、自車両の現在位置の周囲の2次元地図画像を生成し、表示部4に表示する。ステップS1において経路探索処理が終了した場合は(ステップS1/Yes)、制御部7は、探索された経路の誘導を開始する(ステップS2)。次に、制御部7は、検出部2で検出した自車両の現在位置及び自車両の向きを基に、自車両の現在位置を更新する(ステップS3)。
【0037】
次に、制御部7は、経路誘導が終了したか否かを判断する(ステップS4)。経路誘導を終了したと判断する条件としては、例えば、操作部3などから経路誘導の終了指示を受け付けた場合や、自車両が目的地に到着した場合などが挙げられる。制御部7は、経路誘導が終了していない場合は(ステップS4/No)、自車両の現在位置及び自車両の向きの情報を検出部2から継続的に取得し、その検出部2で検出した自車両の現在位置及び自車両の向きの情報、記憶部1から読み出した地図データ、管理部8で管理している道路の位置情報を基に、上下に重なる位置関係となる道路付近に自車両が到達したか否かを判断する(ステップS5)。
【0038】
制御部7は、検出部2で検出した自車両の現在位置が管理部8で管理している道路の位置情報に該当する場合に、上下に重なる位置関係となる道路付近に自車両が到達したと判断する(ステップS5/Yes)。この場合、制御部7は、自車両が視認可能な視点から見た道路の3次元画像に切り替える旨を報知する(ステップS6)。報知の方法は特に限定せず、その旨を表示部4上に表示したり、スピーカ5から音声にて報知したりすることが考えられる。
【0039】
次に、制御部7は、上下に重なる位置関係となる道路の位置情報に対応付けられた視点を管理部8から読み出し、その読み出した視点から見た道路の3次元画像を生成し、その道路の3次元画像に切り替えて表示部4に表示する。これにより、自車両が視認可能な視点から見た道路の3次元画像を表示部4に表示することになる(ステップS7)。その結果
、本実施形態のナビゲーション装置100は、実際の道路の状況を反映し、且つ、自車両の位置をユーザに容易に把握させることができる。
【0040】
例えば、上下に重なる位置関係となる道路の位置情報に対応付けられた視点が右斜め前方からの視点、左斜め前方からの視点の場合は、その視点を管理部8から読み出し、その読み出した視点を基に、右斜め前方の視点、または、左斜め前方の視点から見た道路の3次元画像を生成し、その道路の3次元画像に切り替えて表示部4に表示する。これにより、上下に重なってしまう道路表示を回避し、自車両の位置を判別し易い道路表示を行うことができる。
【0041】
次に、制御部7は、上下に重なる位置関係となる道路を自車両が通過したか否かを判断し(ステップS8)、上下に重なる位置関係となる道路を自車両が通過した場合は(ステップS8/Yes)、ステップS3へ移行し、制御部7は、検出部2で検出した自車両の現在位置及び自車両の向きを基に、自車両の現在位置を更新する(ステップS3)。
【0042】
次に、制御部7は、経路誘導を終了したか否かを判断し(ステップS4)、経路誘導を終了した場合は(ステップS4/Yes)、処理を終了する(End)。また、ステップS8において上下に重なる位置関係となる道路を自車両が通過していない場合は(ステップS8/No)、ステップS7へ移行し、自車両が視認可能な視点から見た道路の3次元画像を表示部4に表示する(ステップS7)。
【0043】
(具体例)
次に、図4、図5を参照しながら、上述したナビゲーション装置100の具体的な処理動作例について説明する。
【0044】
<地上道路と高架道路とが並走する地点で行う処理動作例>
まず、図4を参照しながら、地上道路と高架道路とが並走する地点で行う処理動作例について説明する。
【0045】
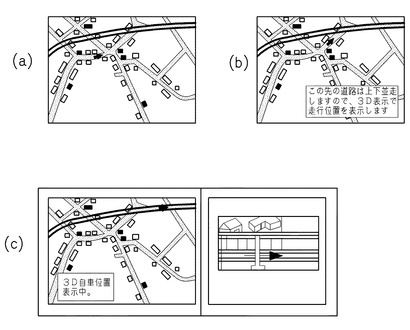
制御部7は、操作部3などから目的地が入力され、検出部2で検出した自車両の現在位置及び自車両の向きを基に、記億部1に記憶されている地図データを参照し、自車両から目的地に至る経路の探索処理が終了したか否かを判断する(ステップS1)。また、制御部7は、記憶部1から自車両の現在位置の周囲の地域の地図データを読み出し、その読み出した地図データを基に、自車両の現在位置の周囲の2次元地図画像を生成し、表示部4に表示する。これにより、制御部7は、図4(a)に示す2次元地図画像を表示部4に表示することができる。図4(a)は、自車両が一般道路(上下に重なる位置関係とならない道路)を走行している時の2次元地図画像例を示す。
【0046】
ステップS1において経路探索処理が終了した場合は(ステップS1/Yes)、制御部7は、探索された経路の誘導を開始する(ステップS2)。次に、制御部7は、検出部2で検出した自車両の現在位置及び自車両の向きを基に、自車両の現在位置を更新する(ステップS3)。
【0047】
次に、制御部7は、経路誘導が終了していない場合は(ステップS4/No)、自車両の現在位置及び自車両の向きの情報を検出部2から継続的に取得し、その検出部2で検出した自車両の現在位置及び自車両の向きの情報、記憶部1から読み出した地図データ、管理部8で管理している道路の位置情報を基に、上下に重なる位置関係となる道路付近に自車両が到達したか否かを判断する(ステップS5)。制御部7は、上下に重なる位置関係となる道路付近に自車両が到達した場合は(ステップS5/Yes)、自車両が視認可能な視点から見た道路の3次元画像に切り替える旨を報知する(ステップS6)。これにより、制御部7は、上下
に重なる位置関係となる道路付近に自車両が到達した場合は、図4(b)に示すように、自車両が視認可能な視点から見た道路の3次元画像に切り替える旨を2次元地図画像上に表示してユーザに報知することができる。
【0048】
次に、制御部7は、上下に重なる位置関係となる道路の位置情報に対応付けられた視点を管理部8から読み出し、その読み出した視点から見た道路の3次元画像を生成し、その道路の3次元画像に切り替えて表示部4に表示する(ステップS6)。これにより、制御部7は、図4(c)に示すように、自車両が視認可能な視点から見た道路の3次元画像を表示部4上に表示することができる。図4(c)では、別ウィンドウ(2画面)で道路の3次元画像を表示することにしている。その結果、ナビゲーション装置100は、上下に重なってしまう道路表示を回避し、自車両の位置を判別し易い道路表示を行うことができる。
【0049】
<螺旋を描くようなループ橋の道路地点で行う処理動作例>
次に、図5を参照しながら、螺旋を描くようなループ橋の道路地点で行う処理動作例について説明する。
【0050】
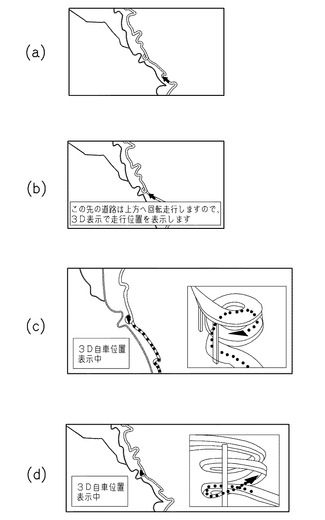
制御部7は、操作部3などから目的地が入力され、検出部2で検出した自車両の現在位置及び自車両の向きを基に、記億部1に記憶されている地図データを参照し、自車両から目的地に至る経路の探索処理が終了したか否かを判断する(ステップS1)。また、制御部7は、記憶部1から自車両の現在位置の周囲の地域の地図データを読み出し、その読み出した地図データを基に、自車両の現在位置の周囲の2次元地図画像を生成し、表示部4に表示する。これにより、制御部7は、図5(a)に示す2次元地図画像を表示部4に表示することができる。図5(a)は、自車両が一般道路(上下に重なる位置関係とならない道路)を走行している時の2次元地図画像例を示す。
【0051】
ステップS1において経路探索処理が終了した場合は(ステップS1/Yes)、制御部7は、探索された経路の誘導を開始する(ステップS2)。次に、制御部7は、検出部2で検出した自車両の現在位置及び自車両の向きを基に、自車両の現在位置を更新する(ステップS3)。
【0052】
次に、制御部7は、経路誘導が終了していない場合は(ステップS4/No)、自車両の現在位置及び自車両の向きの情報を検出部2から継続的に取得し、その検出部2で検出した自車両の現在位置及び自車両の向きの情報、記憶部1から読み出した地図データ、管理部8で管理している道路の位置情報を基に、上下に重なる位置関係となる道路付近に自車両が到達したか否かを判断する(ステップS5)。制御部7は、上下に重なる位置関係となる道路付近に自車両が到達した場合は(ステップS5/Yes)、自車両が視認可能な視点から見た道路の3次元画像に切り替える旨を報知する(ステップS6)。これにより、制御部7は、上下に重なる位置関係となる道路付近に自車両が到達した場合は、図5(b)に示すように、自車両が視認可能な視点から見た道路の3次元画像に切り替える旨を2次元地図画像上に表示してユーザに報知することができる。
【0053】
次に、制御部7は、上下に重なる位置関係となる道路の位置情報に対応付けられた視点を管理部8から読み出し、その読み出した視点から見た道路の3次元画像を生成し、その道路の3次元画像に切り替えて表示部4に表示する(ステップS6)。これにより、制御部7は、図5(c)に示すように、自車両が視認可能な視点から見た道路の3次元画像を表示部4上に表示することができる。図5(c)では、別ウィンドウ(2画面)で道路の3次元画像を表示することにしている。その結果、ナビゲーション装置100は、上下に重なってしまう道路表示を回避し、自車両の位置を判別し易い道路表示を行うことができる。なお、上下に重なる位置関係となる道路の位置情報に対応付けられた視点が複数ある場合は、操作部3からの操作により視点を選択し、その選択した視点から見た道路の3次元画像に
切り替えて表示部4に表示することも可能である。例えば、図5(c)に示す3次元画像を表示部4に表示した状態で、別の視点の選択操作が操作部3から行われた場合は、図5(d)に示す3次元画像を表示部4に表示するようにすることも可能である。また、予め定めた所定の視点から見た道路の3次元画像に切り替えて表示部4に表示することも可能である。この場合、操作部3からの操作により所定の視点を予め設定しておくことも可能である。
【0054】
<本実施形態のナビゲーション装置100の作用・効果>
このように、本実施形態のナビゲーション装置100は、図2に示すように、上方の視点から道路を見た際に上下に重なる位置関係となる道路の位置情報と、その道路の3次元画像を表示部4に表示する際に使用する少なくとも1つの視点と、を対応付けて管理する管理部8を有し、制御部7は、記憶部1に記憶されている地図データと、検出部2で検出した自車両の位置と、管理部8で管理している道路の位置情報と、を基に、上下に重なる位置関係となる道路付近に自車両が到達したと判断した場合は、その道路の位置情報に対応付けられた視点から見た道路の3次元画像に切り替えて表示部4に表示する。これにより、本実施形態のナビゲーション装置100は、実際の道路の状況を反映し、且つ、自車両の位置をユーザに容易に把握させることができる。
【0055】
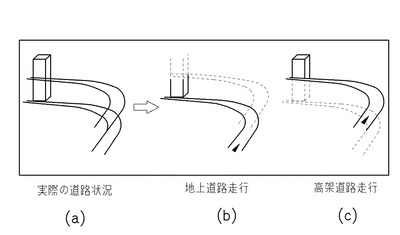
なお、上下に重なる位置関係となる道路の3次元画像を表示部4に表示する際は、現在走行中の自車両位置から見た景観の道路の3次元画像を表示部4に表示することが好ましい。この場合は、自車両が走行している道路側を実線で描画し、自車両が走行していない道路側を点線で描画するようにすることも可能である。例えば、図6(a)に示すような複数道路の立体建造道路などの3次元画像を表示部4に表示する場合は、自車両が地上道路側を走行している場合は、図6(b)に示すように、地上道路側を実線で描画し、高架道路側を点線で描画する。また、自車両が高架道路側を走行している場合は、図6(c)に示すように、地上道路側を点線で描画し、高架道路側を実線で描画する。これにより、自車両が地上道路側を走行しているのか、または、高架道路側を走行しているのかをユーザに把握させることができると共に、その地点から見える状態で建築物、及び、看板の表示も行うことができる。
【0056】
(第2の実施形態)
次に、第2の実施形態について説明する。
【0057】
第2の実施形態は、上下に重なる位置関係となる道路の3次元画像に切り替えて表示部4に表示する際は、自車両の周囲に存在する信号機の状態や他車両の状態を反映させた3次元画像を表示する。これにより、自車両の周囲に存在する信号機の状態や他車両の状態をユーザにリアルタイムで把握させることができる。以下、図7を参照しながら、第2の実施形態について説明する。
【0058】
<ナビゲーション装置100の処理動作例>
まず、図7を参照しながら、本実施形態のナビゲーション装置100の処理動作例について説明する。
【0059】
制御部7は、図7に示すステップS1〜ステップS6までの処理を第1の実施形態と同様に行い、上下に重なる位置関係となる道路付近に自車両が到達した場合は(ステップS5/Yes)、自車両が視認可能な視点から見た道路の3次元画像に切り替える旨を報知する(ステップS6)。
【0060】
次に、制御部7は、信号機データ及び他車両データを通信部6で受信させるための準備を行う(ステップS10)。信号機データは、信号機の状態を特定するためのデータである。
他車両データは、他車両の状態を特定するためのデータである。
【0061】
次に、制御部7は、上下に重なる位置関係となる道路の位置情報に対応付けられた視点を管理部8から読み出し、その読み出した視点から見た道路の3次元画像を生成する。この時、制御部7は、通信部6で受信した信号機データ及び他車両データを道路の3次元画像に反映させて表示部4に表示する(ステップS11)。
【0062】
例えば、通信部6から受信した信号機データが赤の場合は、信号機の点灯に相当する箇所を赤色で描画し、実際の信号機の状態を3次元画像の信号機に反映させて表示する。なお、通信部6が信号機データを受信できていない状況の場合は、実際の信号機の状態とは異なる色を用いて3次元画像の信号機に反映させて表示する。例えば、信号機の点灯に相当する箇所を灰色で描画して表示する。これにより、通信部6が信号機データを受信した場合は、実際の信号機の状態を3次元画像の信号機に反映させて表示することができ、通信部6が信号機データを受信できない場合は、実際の信号機の状態を把握できていない状況を3次元画像に反映させて表示することができる。
【0063】
また、通信部6から受信した他車両データに含まれる他車両の現在位置、他車両の向きの情報、車速データの内容を基に、他車両を特定するための他車両位置マークを道路の3次元画像に反映させて表示する。但し、他車両位置マークの表示位置が3次元画像に含まれるビル等の構造物の影に隠れてしまう場合は、ビル等の構造物を透過させ、他車両位置マークを視認できるような形式で表示する。
【0064】
<本実施形態のナビゲーション装置100の作用・効果>
このように、本実施形態のナビゲーション装置100は、上下に重なる位置関係となる道路の3次元画像に切り替えて表示部4に表示する際は、自車両の周囲に存在する信号機の状態や他車両の状態を反映させた3次元画像を表示する。これにより、自車両の周囲に存在する信号機の状態や他車両の状態をユーザにリアルタイムで把握させることができる。
【0065】
なお、上述する実施形態は、本発明の好適な実施形態であり、上記実施形態のみに本発明の範囲を限定するものではなく、本発明の要旨を逸脱しない範囲において種々の変更を施した形態での実施が可能である。
【0066】
例えば、上述した実施形態では、制御部7は、図3、図7に示す一連の処理動作を行うことにした。しかし、図3、図7に示す一連の処理動作例を1つの制御部7だけで行う必要はなく、複数の制御部で行うように構成することも可能である。
【0067】
また、上述した本実施形態のナビゲーション装置100における制御動作は、ハードウェア、または、ソフトウェア、あるいは、両者の複合構成を用いて実行することも可能である。
【0068】
なお、ソフトウェアを用いて処理を実行する場合には、処理シーケンスを記録したプログラムを、専用のハードウェアに組み込まれているコンピュータ内のメモリにインストールして実行させることが可能である。あるいは、各種処理が実行可能な汎用コンピュータにプログラムをインストールして実行させることが可能である。
【0069】
例えば、プログラムは、記録媒体としてのハードディスクやROM(Read Only Memory)に予め記録しておくことが可能である。あるいは、プログラムは、リムーバブル記録媒体に、一時的、あるいは、永続的に格納(記録)しておくことが可能である。このようなリムーバブル記録媒体は、いわゆるパッケージソフトウエアとして提供することが可能である。なお、リムーバブル記録媒体としては、フロッピー(登録商標)ディスク、CD-ROM(
Compact Disc Read Only Memory)、MO(Magneto optical)ディスク、DVD(Digital Versatile Disc)、ブルーレイディスク、磁気ディスク、半導体メモリなどが挙げられる。
【0070】
なお、プログラムは、上述したようなリムーバブル記録媒体からコンピュータにインストールすることになる。また、ダウンロードサイトから、コンピュータに無線転送することになる。また、ネットワークを介して、コンピュータに有線で転送することになる。
【0071】
また、本実施形態におけるナビゲーション装置100は、上記実施形態で説明した処理動作に従って時系列的に実行されるのみならず、処理を実行する装置の処理能力、あるいは、必要に応じて並列的にあるいは個別に実行するように構築することも可能である。
【符号の説明】
【0072】
100 ナビゲーション装置
1 記憶部
2 検出部
3 操作部
4 表示部
5 スピーカ
6 通信部
7 制御部
8 管理部
【技術分野】
【0001】
本発明は、目的地に至る道路を案内するナビゲーション装置の技術に関する。
【背景技術】
【0002】
近年、実際の道路の映像を模した3次元画像を表示するナビゲーション装置がある。また、ルートの状況に応じて2次元画像と3次元画像とを自動的に切り替えて表示する技術もある(例えば、特許文献1:特開2005-292064号公報、特許文献2:特開平9-304106号公報参照)。
【0003】
しかし、例えば、地上道路と高架道路との関係のように、上方の視点から道路を見た際に上下に重なる位置関係となる道路の場合は、双方の道路が重ねられた状態で表示部に表示され、その重ねられた道路上に自車両位置マーク(自車両を特定するためのマーク)が表示されてしまう。このため、ユーザは、自車両位置マークを確認しても、自車両が上下どちらの道路を走行しているか判別し難いことになる。
【0004】
このようなことから、例えば、特許文献3(特開2009-264819号公報)には、自車両が目的地に至る道路に含まれる交差点を通過する際に、その交差点の上方に高架設備が存在する場合であっても、わかりやすい誘導情報を表示する技術について開示されている。
【0005】
上記特許文献3では、自車両が通過する交差点に対応づけられた誘導区間を含む判断領域の上方に高架設備が存在するか否かを判断し、判断領域の上方に高架設備が存在すると判断した場合は、その交差点の誘導区間を上方の視点から見た三次元動画像データから高架設備の画像が除かれた誘導動画像データを含む誘導情報を表示することにしている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−292064号公報
【特許文献2】特開平9−304106号公報
【特許文献2】特開2009−264819号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記特許文献3の発明は、自車両が走行している道路を把握することができる。しかし、上記特許文献3の発明は、高架設備が存在する場合は、その高架設備の画像を取り除いてしまうため、高架設備の画像が取り除かれた誘導動画像データは、実際の道路の状況と異なって表示されてしまう。このため、ユーザは、誘導動画像データが実際の道路の状況と異なると、その誘導動画像データを見ても、瞬時に実際の道路の状況を把握することができなくなることが多い。
【0008】
本発明は、上記事情に鑑みてなされたものであり、実際の道路の状況を反映し、且つ、自車両の位置をユーザに容易に把握させることが可能なナビゲーション装置、制御方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
かかる目的を達成するために、本発明は、以下の特徴を有することとする。
【0010】
<ナビゲーション装置>
本発明にかかるナビゲーション装置は、
道路を含む地図データを記憶する記憶手段と、
自車両の位置を検出する検出手段と、
前記地図データと前記自車両の位置とを基に、前記自車両が走行している道路の画像を表示手段に表示する制御手段と、を有し、
前記制御手段は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に前記自車両が到達した場合は、前記自車両が走行している前記道路の画像を、前記自車両が視認可能な視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とする。
【0011】
<制御方法>
本発明にかかる制御方法は、
道路を含む地図データを記憶する記憶手段を有するナビゲーション装置で行う制御方法であって、
自車両の位置を検出する検出工程と、
前記地図データと前記自車両の位置とを基に、前記自車両が走行している道路の画像を表示手段に表示する制御工程と、を有し、
前記制御工程は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に前記自車両が到達した場合は、前記自車両が走行している前記道路の画像を、前記自車両が視認可能な視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とする。
【0012】
<プログラム>
本発明にかかるプログラムは、
道路を含む地図データを記憶する記憶手段を有するナビゲーション装置のコンピュータに実行させるプログラムであって、
自車両の位置を検出する検出処理と、
前記地図データと前記自車両の位置とを基に、前記自車両が走行している道路を表示手段に表示する制御処理と、を前記コンピュータに実行させ、
前記制御処理は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に前記自車両が到達した場合は、前記自車両が走行している前記道路の画像を、前記自車両が視認可能な視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とする。
【発明の効果】
【0013】
本発明によれば、実際の道路の状況を反映し、且つ、自車両の位置をユーザに容易に把握させることができる。
【図面の簡単な説明】
【0014】
【図1】本実施形態のナビゲーション装置100の構成例を示す図である。
【図2】管理部8で管理するテーブル構成例を示す図である。
【図3】第1の実施形態のナビゲーション装置100の処理動作例を示す図である。
【図4】ナビゲーション装置100の具体的な処理動作例を説明するための第1の図である。
【図5】ナビゲーション装置100の具体的な処理動作例を説明するための第2の図である。
【図6】道路の3次元画像の表示例を説明するための図である。
【図7】第2の実施形態のナビゲーション装置100の処理動作例を示す図である。
【発明を実施するための形態】
【0015】
<本実施形態のナビゲーション装置100の概要>
まず、図1、図2を参照しながら、本実施形態のナビゲーション装置100の概要について説明する。
【0016】
本実施形態のナビゲーション装置100は、道路を含む地図データを記憶する記憶部1と、自車両の位置を検出する検出部2と、記憶部1に記憶された地図データと検出部2で検出した自車両の位置とを基に、自車両が走行している道路の画像を表示部4に表示する制御部7と、を有して構成する。
【0017】
本実施形態の制御部7は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に自車両が到達した場合は、その自車両が走行している道路の画像を、自車両が視認可能な視点から見た道路の画像に切り替えて表示部4に表示する。
【0018】
具体的には、本実施形態のナビゲーション装置100は、図2に示すように、上方の視点から道路を見た際に上下に重なる位置関係となる『道路の位置情報』と、その道路の画像を表示部4に表示する際に使用する少なくとも1つの『視点』と、を対応付けて管理する管理部8を有し、制御部7は、記憶部1に記憶されている地図データと、検出部2で検出した自車両の位置と、管理部8で管理している道路の位置情報と、を基に、検出部2で検出した自車両の位置が管理部8で管理している道路の位置情報に該当する場合に、上下に重なる位置関係となる道路付近に自車両が到達したと判断し、その道路の位置情報に対応付けられた視点から見た道路の画像に切り替えて表示部4に表示する。これにより、本実施形態のナビゲーション装置100は、実際の道路の状況を反映し、且つ、自車両の位置をユーザに容易に把握させることができる。以下、添付図面を参照しながら、本実施形態のナビゲーション装置100について詳細に説明する。
【0019】
<ナビゲーション装置100の構成例>
まず、図1を参照しながら、本実施形態のナビゲーション装置100の構成例について説明する。
【0020】
本実施形態のナビゲーション装置100は、記憶部1と、検出部2と、操作部3と、表示部4と、スピーカ5と、通信部6と、制御部7と、管理部8と、を有して構成する。
【0021】
記憶部1は、各種情報を記憶するものであり、HDD、ROM、RAMなどで構成する。記憶部1には、例えば、地図表示や経路検索などに必要な道路を含む地図データなどを記憶する。地図データは、1/12500、1/25000、1/50000、1/100000などの縮尺レベルに応じて適当な大きさの緯度幅及び経度幅に区切られており、道路などは緯度及び経度で表現された頂点(ノード)の座標集合として記憶する。道路は、2以上のノードの連結からなり、2つのノードを連結した部分をリンクという。地図データは、複数のレイヤで構成する。レイヤとしては、例えば、道路レイヤ、背景レイヤ、文字・記号レイヤなどが挙げられる。
【0022】
道路レイヤは、道路リスト、ノードテーブル、交差点構成ノードリストなどで構成する。背景レイヤは、地図画面上に道路、建築物、公園、河川などを表示するためのものである。文字・記号レイヤは、市区町村名などの行政区画名、道路名、交差点名などの文字や地図記号などを表示するためのものである。
【0023】
また、地図データには、建築物等を3次元表示するためのポリゴンデータが含まれている。このポリゴンデータにより描画される3次元ポリゴンモデルに対し、テクスチャ処理又は実際の建築物の画像を張り付けることで、リアル感のある3次元地図画像を描画することができる。
【0024】
検出部2は、自車両の現在位置及び自車両の向きなどを検出するものであり、GPS受信部、自立航法センサなどを有して構成する。GPS受信部は、GPS衛星から送られてくるGPS信号を受信して自車両の現在位置(緯度・経度)を検出する。自立航法センサは、自車両の相対位置を測定するセンサであり、自車両の方位角度を検出するジャイロセンサ、自車両の走行距離を検出する車速センサ、自車両の後進を検出するリバースセンサなどで構成する。なお、検出部2の構成は特に限定せず、自車両の現在位置及び自車両の向きを検出することが可能であれば、あらゆる機能を有して構成しても良い。
【0025】
操作部3は、ナビゲーション装置100を操作するためのものであり、各種の操作ボタンなどを設けて構成する。
【0026】
表示部4は、各種情報を表示するものであり、液晶パネルなどで構成する。本実施形態のナビゲーション装置100は、自車両の現在位置の周囲の地図画像を表示部4に表示したり、出発地から目的地までの誘導経路や自車両位置マーク及びその他の案内情報を表示部4に表示したりする。
【0027】
スピーカ5は、音声によりユーザに案内情報を提供する。
【0028】
通信部6は、マルチホップで他車両との間で無線通信を行い、他車両の状態(現在位置、移動速度、移動方向など)を特定するための他車両データを取得する。また、通信部6は、VICSセンタから光ビーコンや電波ビーコンなどを介して提供される交通情報を受信する。また、通信部6は、周辺の信号機との間で無線通信を行い、信号機の状態(信号機の点灯色など)を特定するための信号機データを取得する。
【0029】
制御部7は、ナビゲーション装置100を制御するものである。制御部7は、記憶部1から所定の範囲の地図データを読み出し、該読み出した地図データと、検出部2で検出した自車両の現在位置及び自車両の向きと、を用いて操作部3などから設定された探索条件で出発地から目的地までの誘導経路を探索するなどの種々の処理を行う。制御部7で検索した誘導経路は記憶部1に記憶する。なお、記憶部1には、制御部7によって探索された誘導経路の全ノードが出発地から目的地まで記憶される。また、制御部7は、記憶部1に記憶した誘導経路を描画する。なお、制御部7は、記憶部1から誘導経路情報(ノード列)を読み出し、他の道路とは異なる色及び太さで誘導経路を描画する。
【0030】
また、制御部7は、記憶部1から読み出した地図データを用いて地図画像を描画する。また、動作状況に応じた各種メニュー画面(操作画面)や自車両位置マーク及びカーソル等の各種マークを描画する。そして、地図画像に対し、各種マークや操作画面、又は誘導経路などを重ね合わせて表示部4に表示する。また、制御部7は、スピーカ5から音声により案内情報を報知するように制御する。
【0031】
管理部8は、図2に示すように、上方の視点から道路を見た際に上下に重なる位置関係となる『道路の位置情報』と、その道路の3次元画像を表示部4に表示する際に使用する『視点』と、を対応付けて管理する。上方の視点から道路を見た際に上下に重なる位置関係となる道路としては、例えば、地上道路と高架道路との関係がある道路、螺旋を描くようなループ橋となっている道路などが挙げられる。
【0032】
本実施形態の制御部7は、検出部2で検出した自車両の現在位置及び自車両の向きを基に、記憶部1から自車両の現在位置の周囲の地域の地図データを読み出す。そして、記憶部1から読み出した地図データを基に地図画像を生成し、自車両の現在位置の周囲の地図画像を表示部4に表示する。また、制御部7は、地図画像上の道路に自車両の現在位置を示す自車両位置マークを重ね合わせて表示し、自車両の移動に伴って地図画像上の自車両位置マ
ークを移動したり、地図画像をスクロールしたりする。
【0033】
また、ユーザが操作部3を操作して目的地を設定すると、制御部7は、自車両の現在位置を出発地とし、予め設定された条件で出発地から目的地までの経路を探索し、探索により得られた経路を記憶部1に記憶する。そして、制御部7は、自車両の走行に伴って適宜案内情報を出力し、自車両を目的地まで経路に沿って走行するように案内する。
【0034】
また、制御部7は、記憶部1から読み出した地図データと、検出部2で検出した自車両の現在位置及び自車両の向きと、管理部8で管理している道路の位置情報と、を基に、自車両が上下に重なる位置関係となる道路付近に到達したか否かを判断し、自車両が上下に重なる位置関係となる道路付近に到達した場合は、その道路の位置情報に対応付けられた視点から見た道路の3次元画像を描画し、その描画した道路の3次元画像を表示部4に表示する。これにより、制御部7は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に自車両が到達した場合は、その自車両が走行している道路を、自車両が視認可能な視点から見た道路の3次元画像に切り替えて表示部4に表示することができる。
【0035】
<ナビゲーション装置100の処理動作例>
次に、図3を参照しながら、本実施形態のナビゲーション装置100の処理動作例について説明する。
【0036】
制御部7は、操作部3などから目的地が入力され、検出部2で検出した自車両の現在位置及び自車両の向きを基に、記億部1に記憶されている地図データを参照し、自車両から目的地に至る経路の探索処理が終了したか否かを判断する(ステップS1)。また、制御部7は、記憶部1から自車両の現在位置の周囲の地域の地図データを読み出し、その読み出した地図データを基に、自車両の現在位置の周囲の2次元地図画像を生成し、表示部4に表示する。ステップS1において経路探索処理が終了した場合は(ステップS1/Yes)、制御部7は、探索された経路の誘導を開始する(ステップS2)。次に、制御部7は、検出部2で検出した自車両の現在位置及び自車両の向きを基に、自車両の現在位置を更新する(ステップS3)。
【0037】
次に、制御部7は、経路誘導が終了したか否かを判断する(ステップS4)。経路誘導を終了したと判断する条件としては、例えば、操作部3などから経路誘導の終了指示を受け付けた場合や、自車両が目的地に到着した場合などが挙げられる。制御部7は、経路誘導が終了していない場合は(ステップS4/No)、自車両の現在位置及び自車両の向きの情報を検出部2から継続的に取得し、その検出部2で検出した自車両の現在位置及び自車両の向きの情報、記憶部1から読み出した地図データ、管理部8で管理している道路の位置情報を基に、上下に重なる位置関係となる道路付近に自車両が到達したか否かを判断する(ステップS5)。
【0038】
制御部7は、検出部2で検出した自車両の現在位置が管理部8で管理している道路の位置情報に該当する場合に、上下に重なる位置関係となる道路付近に自車両が到達したと判断する(ステップS5/Yes)。この場合、制御部7は、自車両が視認可能な視点から見た道路の3次元画像に切り替える旨を報知する(ステップS6)。報知の方法は特に限定せず、その旨を表示部4上に表示したり、スピーカ5から音声にて報知したりすることが考えられる。
【0039】
次に、制御部7は、上下に重なる位置関係となる道路の位置情報に対応付けられた視点を管理部8から読み出し、その読み出した視点から見た道路の3次元画像を生成し、その道路の3次元画像に切り替えて表示部4に表示する。これにより、自車両が視認可能な視点から見た道路の3次元画像を表示部4に表示することになる(ステップS7)。その結果
、本実施形態のナビゲーション装置100は、実際の道路の状況を反映し、且つ、自車両の位置をユーザに容易に把握させることができる。
【0040】
例えば、上下に重なる位置関係となる道路の位置情報に対応付けられた視点が右斜め前方からの視点、左斜め前方からの視点の場合は、その視点を管理部8から読み出し、その読み出した視点を基に、右斜め前方の視点、または、左斜め前方の視点から見た道路の3次元画像を生成し、その道路の3次元画像に切り替えて表示部4に表示する。これにより、上下に重なってしまう道路表示を回避し、自車両の位置を判別し易い道路表示を行うことができる。
【0041】
次に、制御部7は、上下に重なる位置関係となる道路を自車両が通過したか否かを判断し(ステップS8)、上下に重なる位置関係となる道路を自車両が通過した場合は(ステップS8/Yes)、ステップS3へ移行し、制御部7は、検出部2で検出した自車両の現在位置及び自車両の向きを基に、自車両の現在位置を更新する(ステップS3)。
【0042】
次に、制御部7は、経路誘導を終了したか否かを判断し(ステップS4)、経路誘導を終了した場合は(ステップS4/Yes)、処理を終了する(End)。また、ステップS8において上下に重なる位置関係となる道路を自車両が通過していない場合は(ステップS8/No)、ステップS7へ移行し、自車両が視認可能な視点から見た道路の3次元画像を表示部4に表示する(ステップS7)。
【0043】
(具体例)
次に、図4、図5を参照しながら、上述したナビゲーション装置100の具体的な処理動作例について説明する。
【0044】
<地上道路と高架道路とが並走する地点で行う処理動作例>
まず、図4を参照しながら、地上道路と高架道路とが並走する地点で行う処理動作例について説明する。
【0045】
制御部7は、操作部3などから目的地が入力され、検出部2で検出した自車両の現在位置及び自車両の向きを基に、記億部1に記憶されている地図データを参照し、自車両から目的地に至る経路の探索処理が終了したか否かを判断する(ステップS1)。また、制御部7は、記憶部1から自車両の現在位置の周囲の地域の地図データを読み出し、その読み出した地図データを基に、自車両の現在位置の周囲の2次元地図画像を生成し、表示部4に表示する。これにより、制御部7は、図4(a)に示す2次元地図画像を表示部4に表示することができる。図4(a)は、自車両が一般道路(上下に重なる位置関係とならない道路)を走行している時の2次元地図画像例を示す。
【0046】
ステップS1において経路探索処理が終了した場合は(ステップS1/Yes)、制御部7は、探索された経路の誘導を開始する(ステップS2)。次に、制御部7は、検出部2で検出した自車両の現在位置及び自車両の向きを基に、自車両の現在位置を更新する(ステップS3)。
【0047】
次に、制御部7は、経路誘導が終了していない場合は(ステップS4/No)、自車両の現在位置及び自車両の向きの情報を検出部2から継続的に取得し、その検出部2で検出した自車両の現在位置及び自車両の向きの情報、記憶部1から読み出した地図データ、管理部8で管理している道路の位置情報を基に、上下に重なる位置関係となる道路付近に自車両が到達したか否かを判断する(ステップS5)。制御部7は、上下に重なる位置関係となる道路付近に自車両が到達した場合は(ステップS5/Yes)、自車両が視認可能な視点から見た道路の3次元画像に切り替える旨を報知する(ステップS6)。これにより、制御部7は、上下
に重なる位置関係となる道路付近に自車両が到達した場合は、図4(b)に示すように、自車両が視認可能な視点から見た道路の3次元画像に切り替える旨を2次元地図画像上に表示してユーザに報知することができる。
【0048】
次に、制御部7は、上下に重なる位置関係となる道路の位置情報に対応付けられた視点を管理部8から読み出し、その読み出した視点から見た道路の3次元画像を生成し、その道路の3次元画像に切り替えて表示部4に表示する(ステップS6)。これにより、制御部7は、図4(c)に示すように、自車両が視認可能な視点から見た道路の3次元画像を表示部4上に表示することができる。図4(c)では、別ウィンドウ(2画面)で道路の3次元画像を表示することにしている。その結果、ナビゲーション装置100は、上下に重なってしまう道路表示を回避し、自車両の位置を判別し易い道路表示を行うことができる。
【0049】
<螺旋を描くようなループ橋の道路地点で行う処理動作例>
次に、図5を参照しながら、螺旋を描くようなループ橋の道路地点で行う処理動作例について説明する。
【0050】
制御部7は、操作部3などから目的地が入力され、検出部2で検出した自車両の現在位置及び自車両の向きを基に、記億部1に記憶されている地図データを参照し、自車両から目的地に至る経路の探索処理が終了したか否かを判断する(ステップS1)。また、制御部7は、記憶部1から自車両の現在位置の周囲の地域の地図データを読み出し、その読み出した地図データを基に、自車両の現在位置の周囲の2次元地図画像を生成し、表示部4に表示する。これにより、制御部7は、図5(a)に示す2次元地図画像を表示部4に表示することができる。図5(a)は、自車両が一般道路(上下に重なる位置関係とならない道路)を走行している時の2次元地図画像例を示す。
【0051】
ステップS1において経路探索処理が終了した場合は(ステップS1/Yes)、制御部7は、探索された経路の誘導を開始する(ステップS2)。次に、制御部7は、検出部2で検出した自車両の現在位置及び自車両の向きを基に、自車両の現在位置を更新する(ステップS3)。
【0052】
次に、制御部7は、経路誘導が終了していない場合は(ステップS4/No)、自車両の現在位置及び自車両の向きの情報を検出部2から継続的に取得し、その検出部2で検出した自車両の現在位置及び自車両の向きの情報、記憶部1から読み出した地図データ、管理部8で管理している道路の位置情報を基に、上下に重なる位置関係となる道路付近に自車両が到達したか否かを判断する(ステップS5)。制御部7は、上下に重なる位置関係となる道路付近に自車両が到達した場合は(ステップS5/Yes)、自車両が視認可能な視点から見た道路の3次元画像に切り替える旨を報知する(ステップS6)。これにより、制御部7は、上下に重なる位置関係となる道路付近に自車両が到達した場合は、図5(b)に示すように、自車両が視認可能な視点から見た道路の3次元画像に切り替える旨を2次元地図画像上に表示してユーザに報知することができる。
【0053】
次に、制御部7は、上下に重なる位置関係となる道路の位置情報に対応付けられた視点を管理部8から読み出し、その読み出した視点から見た道路の3次元画像を生成し、その道路の3次元画像に切り替えて表示部4に表示する(ステップS6)。これにより、制御部7は、図5(c)に示すように、自車両が視認可能な視点から見た道路の3次元画像を表示部4上に表示することができる。図5(c)では、別ウィンドウ(2画面)で道路の3次元画像を表示することにしている。その結果、ナビゲーション装置100は、上下に重なってしまう道路表示を回避し、自車両の位置を判別し易い道路表示を行うことができる。なお、上下に重なる位置関係となる道路の位置情報に対応付けられた視点が複数ある場合は、操作部3からの操作により視点を選択し、その選択した視点から見た道路の3次元画像に
切り替えて表示部4に表示することも可能である。例えば、図5(c)に示す3次元画像を表示部4に表示した状態で、別の視点の選択操作が操作部3から行われた場合は、図5(d)に示す3次元画像を表示部4に表示するようにすることも可能である。また、予め定めた所定の視点から見た道路の3次元画像に切り替えて表示部4に表示することも可能である。この場合、操作部3からの操作により所定の視点を予め設定しておくことも可能である。
【0054】
<本実施形態のナビゲーション装置100の作用・効果>
このように、本実施形態のナビゲーション装置100は、図2に示すように、上方の視点から道路を見た際に上下に重なる位置関係となる道路の位置情報と、その道路の3次元画像を表示部4に表示する際に使用する少なくとも1つの視点と、を対応付けて管理する管理部8を有し、制御部7は、記憶部1に記憶されている地図データと、検出部2で検出した自車両の位置と、管理部8で管理している道路の位置情報と、を基に、上下に重なる位置関係となる道路付近に自車両が到達したと判断した場合は、その道路の位置情報に対応付けられた視点から見た道路の3次元画像に切り替えて表示部4に表示する。これにより、本実施形態のナビゲーション装置100は、実際の道路の状況を反映し、且つ、自車両の位置をユーザに容易に把握させることができる。
【0055】
なお、上下に重なる位置関係となる道路の3次元画像を表示部4に表示する際は、現在走行中の自車両位置から見た景観の道路の3次元画像を表示部4に表示することが好ましい。この場合は、自車両が走行している道路側を実線で描画し、自車両が走行していない道路側を点線で描画するようにすることも可能である。例えば、図6(a)に示すような複数道路の立体建造道路などの3次元画像を表示部4に表示する場合は、自車両が地上道路側を走行している場合は、図6(b)に示すように、地上道路側を実線で描画し、高架道路側を点線で描画する。また、自車両が高架道路側を走行している場合は、図6(c)に示すように、地上道路側を点線で描画し、高架道路側を実線で描画する。これにより、自車両が地上道路側を走行しているのか、または、高架道路側を走行しているのかをユーザに把握させることができると共に、その地点から見える状態で建築物、及び、看板の表示も行うことができる。
【0056】
(第2の実施形態)
次に、第2の実施形態について説明する。
【0057】
第2の実施形態は、上下に重なる位置関係となる道路の3次元画像に切り替えて表示部4に表示する際は、自車両の周囲に存在する信号機の状態や他車両の状態を反映させた3次元画像を表示する。これにより、自車両の周囲に存在する信号機の状態や他車両の状態をユーザにリアルタイムで把握させることができる。以下、図7を参照しながら、第2の実施形態について説明する。
【0058】
<ナビゲーション装置100の処理動作例>
まず、図7を参照しながら、本実施形態のナビゲーション装置100の処理動作例について説明する。
【0059】
制御部7は、図7に示すステップS1〜ステップS6までの処理を第1の実施形態と同様に行い、上下に重なる位置関係となる道路付近に自車両が到達した場合は(ステップS5/Yes)、自車両が視認可能な視点から見た道路の3次元画像に切り替える旨を報知する(ステップS6)。
【0060】
次に、制御部7は、信号機データ及び他車両データを通信部6で受信させるための準備を行う(ステップS10)。信号機データは、信号機の状態を特定するためのデータである。
他車両データは、他車両の状態を特定するためのデータである。
【0061】
次に、制御部7は、上下に重なる位置関係となる道路の位置情報に対応付けられた視点を管理部8から読み出し、その読み出した視点から見た道路の3次元画像を生成する。この時、制御部7は、通信部6で受信した信号機データ及び他車両データを道路の3次元画像に反映させて表示部4に表示する(ステップS11)。
【0062】
例えば、通信部6から受信した信号機データが赤の場合は、信号機の点灯に相当する箇所を赤色で描画し、実際の信号機の状態を3次元画像の信号機に反映させて表示する。なお、通信部6が信号機データを受信できていない状況の場合は、実際の信号機の状態とは異なる色を用いて3次元画像の信号機に反映させて表示する。例えば、信号機の点灯に相当する箇所を灰色で描画して表示する。これにより、通信部6が信号機データを受信した場合は、実際の信号機の状態を3次元画像の信号機に反映させて表示することができ、通信部6が信号機データを受信できない場合は、実際の信号機の状態を把握できていない状況を3次元画像に反映させて表示することができる。
【0063】
また、通信部6から受信した他車両データに含まれる他車両の現在位置、他車両の向きの情報、車速データの内容を基に、他車両を特定するための他車両位置マークを道路の3次元画像に反映させて表示する。但し、他車両位置マークの表示位置が3次元画像に含まれるビル等の構造物の影に隠れてしまう場合は、ビル等の構造物を透過させ、他車両位置マークを視認できるような形式で表示する。
【0064】
<本実施形態のナビゲーション装置100の作用・効果>
このように、本実施形態のナビゲーション装置100は、上下に重なる位置関係となる道路の3次元画像に切り替えて表示部4に表示する際は、自車両の周囲に存在する信号機の状態や他車両の状態を反映させた3次元画像を表示する。これにより、自車両の周囲に存在する信号機の状態や他車両の状態をユーザにリアルタイムで把握させることができる。
【0065】
なお、上述する実施形態は、本発明の好適な実施形態であり、上記実施形態のみに本発明の範囲を限定するものではなく、本発明の要旨を逸脱しない範囲において種々の変更を施した形態での実施が可能である。
【0066】
例えば、上述した実施形態では、制御部7は、図3、図7に示す一連の処理動作を行うことにした。しかし、図3、図7に示す一連の処理動作例を1つの制御部7だけで行う必要はなく、複数の制御部で行うように構成することも可能である。
【0067】
また、上述した本実施形態のナビゲーション装置100における制御動作は、ハードウェア、または、ソフトウェア、あるいは、両者の複合構成を用いて実行することも可能である。
【0068】
なお、ソフトウェアを用いて処理を実行する場合には、処理シーケンスを記録したプログラムを、専用のハードウェアに組み込まれているコンピュータ内のメモリにインストールして実行させることが可能である。あるいは、各種処理が実行可能な汎用コンピュータにプログラムをインストールして実行させることが可能である。
【0069】
例えば、プログラムは、記録媒体としてのハードディスクやROM(Read Only Memory)に予め記録しておくことが可能である。あるいは、プログラムは、リムーバブル記録媒体に、一時的、あるいは、永続的に格納(記録)しておくことが可能である。このようなリムーバブル記録媒体は、いわゆるパッケージソフトウエアとして提供することが可能である。なお、リムーバブル記録媒体としては、フロッピー(登録商標)ディスク、CD-ROM(
Compact Disc Read Only Memory)、MO(Magneto optical)ディスク、DVD(Digital Versatile Disc)、ブルーレイディスク、磁気ディスク、半導体メモリなどが挙げられる。
【0070】
なお、プログラムは、上述したようなリムーバブル記録媒体からコンピュータにインストールすることになる。また、ダウンロードサイトから、コンピュータに無線転送することになる。また、ネットワークを介して、コンピュータに有線で転送することになる。
【0071】
また、本実施形態におけるナビゲーション装置100は、上記実施形態で説明した処理動作に従って時系列的に実行されるのみならず、処理を実行する装置の処理能力、あるいは、必要に応じて並列的にあるいは個別に実行するように構築することも可能である。
【符号の説明】
【0072】
100 ナビゲーション装置
1 記憶部
2 検出部
3 操作部
4 表示部
5 スピーカ
6 通信部
7 制御部
8 管理部
【特許請求の範囲】
【請求項1】
道路を含む地図データを記憶する記憶手段と、
自車両の位置を検出する検出手段と、
前記地図データと前記自車両の位置とを基に、前記自車両が走行している道路の画像を表示手段に表示する制御手段と、を有し、
前記制御手段は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に前記自車両が到達した場合は、前記自車両が走行している前記道路の画像を、前記自車両が視認可能な視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とするナビゲーション装置。
【請求項2】
上方の視点から道路を見た際に上下に重なる位置関係となる道路の位置情報と、前記道路の画像を表示する際に使用する少なくとも1つの前記視点と、を対応付けて管理する管理手段を有し、
前記制御手段は、前記自車両の位置が前記道路の位置情報に該当する場合に、上下に重なる位置関係となる道路付近に前記自車両が到達したと判断し、前記道路の位置情報に対応付けられた前記視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とする請求項1記載のナビゲーション装置。
【請求項3】
前記制御手段は、前記道路の位置情報に対応付けられた前記視点が複数存在する場合は、所定の前記視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とする請求項2記載のナビゲーション装置。
【請求項4】
前記道路の位置情報に対応付けられた前記視点を選択する操作手段を有し、
前記制御手段は、前記操作手段により前記視点が選択された場合は、該選択された前記視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とする請求項2または3記載のナビゲーション装置。
【請求項5】
信号機の状態を特定するための信号機データと、他車両の状態を特定するための他車両データと、の少なくとも1つのデータを取得する通信手段を有し、
前記制御手段は、前記通信手段が取得した前記信号機データに応じた信号機の状態と、前記他車両データに応じた他車両の状態と、の少なくとも1つの状態を前記道路の画像に反映させて前記表示手段に表示することを特徴とする請求項1から4のいずれか1項に記載のナビゲーション装置。
【請求項6】
道路を含む地図データを記憶する記憶手段を有するナビゲーション装置で行う制御方法であって、
自車両の位置を検出する検出工程と、
前記地図データと前記自車両の位置とを基に、前記自車両が走行している道路の画像を表示手段に表示する制御工程と、を有し、
前記制御工程は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に前記自車両が到達した場合は、前記自車両が走行している前記道路の画像を、前記自車両が視認可能な視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とする制御方法。
【請求項7】
道路を含む地図データを記憶する記憶手段を有するナビゲーション装置のコンピュータに実行させるプログラムであって、
自車両の位置を検出する検出処理と、
前記地図データと前記自車両の位置とを基に、前記自車両が走行している道路を表示手段に表示する制御処理と、を前記コンピュータに実行させ、
前記制御処理は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に前記自車両が到達した場合は、前記自車両が走行している前記道路の画像を、前記自車両が視認可能な視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とするプログラム。
【請求項1】
道路を含む地図データを記憶する記憶手段と、
自車両の位置を検出する検出手段と、
前記地図データと前記自車両の位置とを基に、前記自車両が走行している道路の画像を表示手段に表示する制御手段と、を有し、
前記制御手段は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に前記自車両が到達した場合は、前記自車両が走行している前記道路の画像を、前記自車両が視認可能な視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とするナビゲーション装置。
【請求項2】
上方の視点から道路を見た際に上下に重なる位置関係となる道路の位置情報と、前記道路の画像を表示する際に使用する少なくとも1つの前記視点と、を対応付けて管理する管理手段を有し、
前記制御手段は、前記自車両の位置が前記道路の位置情報に該当する場合に、上下に重なる位置関係となる道路付近に前記自車両が到達したと判断し、前記道路の位置情報に対応付けられた前記視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とする請求項1記載のナビゲーション装置。
【請求項3】
前記制御手段は、前記道路の位置情報に対応付けられた前記視点が複数存在する場合は、所定の前記視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とする請求項2記載のナビゲーション装置。
【請求項4】
前記道路の位置情報に対応付けられた前記視点を選択する操作手段を有し、
前記制御手段は、前記操作手段により前記視点が選択された場合は、該選択された前記視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とする請求項2または3記載のナビゲーション装置。
【請求項5】
信号機の状態を特定するための信号機データと、他車両の状態を特定するための他車両データと、の少なくとも1つのデータを取得する通信手段を有し、
前記制御手段は、前記通信手段が取得した前記信号機データに応じた信号機の状態と、前記他車両データに応じた他車両の状態と、の少なくとも1つの状態を前記道路の画像に反映させて前記表示手段に表示することを特徴とする請求項1から4のいずれか1項に記載のナビゲーション装置。
【請求項6】
道路を含む地図データを記憶する記憶手段を有するナビゲーション装置で行う制御方法であって、
自車両の位置を検出する検出工程と、
前記地図データと前記自車両の位置とを基に、前記自車両が走行している道路の画像を表示手段に表示する制御工程と、を有し、
前記制御工程は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に前記自車両が到達した場合は、前記自車両が走行している前記道路の画像を、前記自車両が視認可能な視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とする制御方法。
【請求項7】
道路を含む地図データを記憶する記憶手段を有するナビゲーション装置のコンピュータに実行させるプログラムであって、
自車両の位置を検出する検出処理と、
前記地図データと前記自車両の位置とを基に、前記自車両が走行している道路を表示手段に表示する制御処理と、を前記コンピュータに実行させ、
前記制御処理は、上方の視点から道路を見た際に上下に重なる位置関係となる道路付近に前記自車両が到達した場合は、前記自車両が走行している前記道路の画像を、前記自車両が視認可能な視点から見た前記道路の画像に切り替えて前記表示手段に表示することを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−242292(P2012−242292A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−113856(P2011−113856)
【出願日】平成23年5月20日(2011.5.20)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月20日(2011.5.20)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]