
ナビゲーション装置、及びナビゲーション用プログラム
【課題】道路の勾配情報に基づく走行中の道路の特定処理の精度をより向上させること。
【解決手段】ナビゲーション装置には、道路ごとの勾配情報を示した道路情報、抑止区間の設定情報が予め記憶されている。抑止区間とは、道路の判定基準となる走行道路の実勾配を検出させない区間であり、例えば、分岐点から半径L1未満の区域に設定されている。ナビゲーション装置のCPUは、取付道路による分岐点の通過を検出すると、分岐点からの走行距離に基づいて車両が抑止区間を走行中であるか否かを判断する。車両が抑止区間を外れると、CPUは走行中の道路の実勾配を検出し、特定対象の候補道路(取付道路、一般道路)の勾配情報と検出された実勾配とを照合する。そして、走行道路の実勾配との相関の度合いがより小さい道路を候補道路から特定し、この特定結果に基づいて対応する地図上の道路に自車位置を表示する。
【解決手段】ナビゲーション装置には、道路ごとの勾配情報を示した道路情報、抑止区間の設定情報が予め記憶されている。抑止区間とは、道路の判定基準となる走行道路の実勾配を検出させない区間であり、例えば、分岐点から半径L1未満の区域に設定されている。ナビゲーション装置のCPUは、取付道路による分岐点の通過を検出すると、分岐点からの走行距離に基づいて車両が抑止区間を走行中であるか否かを判断する。車両が抑止区間を外れると、CPUは走行中の道路の実勾配を検出し、特定対象の候補道路(取付道路、一般道路)の勾配情報と検出された実勾配とを照合する。そして、走行道路の実勾配との相関の度合いがより小さい道路を候補道路から特定し、この特定結果に基づいて対応する地図上の道路に自車位置を表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置及びナビゲーション用プログラムに関し、例えば、地図上に自車位置を表示する技術に関する。
【背景技術】
【0002】
目的地までの走行経路を探索して経路誘導を行うナビゲーション装置が広く普及している。
ナビゲーション装置には、GPS(全地球測位システム)等を用いて算出された車両の位置情報と、地図データとに基づいてマップマッチング処理を行い、地図上の道路に自車位置を表示させる機能が設けられている。
このようなナビゲーション装置において、実際の車両の現在位置と、地図上に表示される自車位置とのマッチング精度を向上させるための技術が下記の特許文献に提案されている。
【特許文献1】特開平10−253373号公報
【0003】
特許文献1記載技術では、車両に設けられたセンサで走行中の道路の勾配を検出し、検出された道路の勾配と、地図データベースに格納されている道路の勾配情報との照合結果に基づいて、地図上に表示する自車位置の補正を行うようにしている。
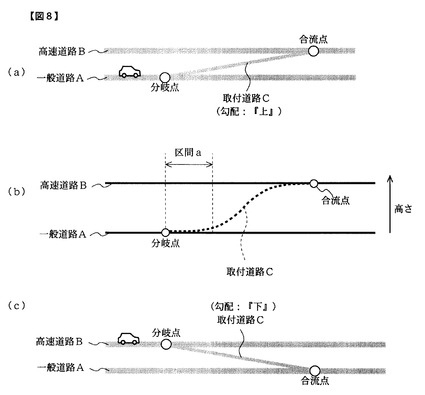
図8(a)は、取付道路の配置例を示した図である。
例えば、図8(a)に示すような一般道路Aと高速道路Bのように高低差のある道路間をつなぐ道路(以下、取付道路Cとする)へ進入したか否かの判別も、上述したような道路の勾配情報に基づいて行い、その判別結果に基づいて走行中の地図上の道路を特定する。
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、地図データベースに格納されている取付道路Cに対する勾配情報を、細分された区間ごとの情報として格納させると、データ収集の手間が掛かるうえデータ量の増大を引き起こす。そこで、地図データベースには、格納するデータ量を低減させるために、大まかな勾配情報として、分岐点から合流点まで同一の勾配情報を格納したものがある。例えば、一般道路Aと高速道路Bとをつなぐ取付道路Cの場合、一般道路Aの分岐点から高速道路Bの合流点までの勾配情報として『上』が設定されている。なお、勾配情報は、『上・平・下』の3段階で定義されている。
図8(b)は、取付道路の実勾配の一例を示した図である。
しかしながら実際の取付道路Cは、図8(b)に示すように分岐点の直後(区間a)には勾配のない平らな部分が存在する。
そのため、勾配情報『上』の取付道路Cに進入した車両であっても、区間aを走行する車両のセンサは、その区間の勾配を『平』と判断してしまう。
【0005】
このように地図データベースに格納されている取付道路Cの勾配情報『上』と、実際のセンサの検出結果『平』が一致しない場合、ナビゲーション装置は、センサの検出結果『平』に対応する道路(ここでは、一般道路A)を走行中の道路と特定し、該道路上に自車位置を表示してしまう。
つまり、実際に勾配が現れない区間aでは、誤った自車位置の特定がなされ、これにより地図上に表示される自車位置と実際の車両の現在位置とのマッチング精度が低下するおそれがあった。
【0006】
図8(c)は、取付道路の他の配置例を示した図である。
例えば、図8(c)に示す高速道路Bから取付道路Cに実際に進入した場合であっても、取付道路Cにおける実際に勾配が現れない区間で同様の誤判定がなされ、高速道路Bに自車位置が特定される場合があった。
【0007】
また、目的地までの案内経路に従って走行している途中で、上述したような誤った自車位置の特定がなされると、ナビゲーション装置は、車両が案内経路から外れたと判断する。
自車が案内経路を逸脱した時に目的地までの案内経路を再設定するリルート機能が有効である場合、ナビゲーション装置は、誤った自車位置から目的地までの案内経路を再設定してしまう。つまり、誤って特定された自車位置の影響が案内経路にまで及んでしまう。
【0008】
そこで本発明は、道路の勾配情報に基づく走行中の道路の特定処理の精度をより向上させることを目的とする。
【課題を解決するための手段】
【0009】
(1)前記目的を達成するために、請求項1に記載の発明では、道路と該道路の勾配情報とを関連付けた道路情報を有する地図データを記憶する地図データ記憶手段と、前記地図データに勾配情報が記憶された勾配道路との分岐点の通過を検出する分岐通過検出手段と、前記分岐点の通過を検出した後、前記分岐点に基づいて定められた所定の抑止区域外を走行中に走行道路の実勾配を検出する実勾配検出手段と、前記検出した走行道路の実勾配と前記道路情報とに基づいて、走行中の地図上の道路を特定する道路特定手段と、前記特定された道路上に自車両の現在位置を表示する自車位置表示手段と、を具備することを特徴とするナビゲーション装置を提供する。
(2)請求項2に記載の発明では、前記分岐点からの距離を測定する距離測定手段を備え、前記実勾配検出手段は、前記分岐点からの距離に基づいて設定された前記所定の抑止区域外を走行中に走行道路の実勾配を検出することを特徴とする請求項1記載のナビゲーション装置を提供する。
(3)請求項3に記載の発明では、前記所定の抑止区域は、前記勾配道路における前記分岐点及び他の道路との合流点のうち少なくとも一方から所定の距離の区間を含むことを特徴とする請求項1又は請求項2記載のナビゲーション装置を提供する。
(4)請求項4に記載の発明では、前記所定の抑止区域は、前記勾配道路との分岐点ごとに、該勾配道路に基づいて設定されていることを特徴とする請求項1から請求項3のいずれか1の請求項に記載のナビゲーション装置を提供する。
(5)請求項5に記載の発明では、前記勾配道路は、高低差のある道路間をつなぐ取付道路であることを特徴とする請求項1から請求項4のいずれか1の請求項に記載のナビゲーション装置を提供する。
(6)請求項6に記載の発明では、前記分岐点を基準とする走行高度を検出する高度検出手段を備え、前記道路特定手段は、さらに前記検出された走行高度に基づいて走行中の地図上の道路を特定することを特徴とする請求項1から請求項5のいずれか1の請求項に記載のナビゲーション装置を提供する。
(7)請求項7に記載の発明では、コンピュータを、前記地図データに勾配情報が記憶された勾配道路との分岐点の通過を検出する分岐通過検出手段と、前記分岐点の通過を検出した後、前記分岐点に基づいて定められた所定の抑止区域外を走行中に走行道路の実勾配を検出する実勾配検出手段と、地図データ記憶手段に記憶された道路と該道路の勾配情報とを関連付けた道路情報と、前記検出した走行道路の実勾配とに基づいて、走行中の地図上の道路を特定する道路特定手段と、前記特定された道路上に自車両の現在位置を表示する自車位置表示手段と、して機能させることを特徴とするナビゲーション用プログラムを提供する。
【発明の効果】
【0010】
本発明によれば、所定の抑止区域外において走行道路の実勾配を検出することにより、この検出された実勾配に基づいて、より精度の高い走行中の道路の特定処理を行うことができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明のナビゲーション装置における好適な実施の形態について、図1から図7を参照して詳細に説明する。
(1)実施形態の概要
ナビゲーション装置は、車両の位置情報や操作情報、環境情報等と地図データとに基づいて、車両が存在する道路を特定するマップマッチング機能を備えている。
本実施形態では、走行中の道路の実勾配と道路情報の有する勾配情報とに基づいて、車両が存在する道路を特定する方法について説明する。
ここでは、一般道路を走行中に取付道路との分岐点を通過した際、取付道路に進入したか、継続して一般道路を走行しているかを判断する場合について説明する。
ナビゲーション装置には、道路ごとの勾配情報を示した道路情報、抑止区間の設定情報が予め記憶されている。
抑止区間とは、道路の判定基準となる走行道路の実勾配を検出させない区間であり、例えば、分岐点から半径L1未満の区域に設定されている。
【0012】
ナビゲーション装置のCPUは、取付道路との分岐点の通過を検出すると、分岐点からの走行距離に基づいて車両が抑止区間を走行中であるか否かを判断する。
車両が抑止区間を外れると、CPUは走行中の道路の実勾配を検出し、特定対象の候補道路(取付道路、一般道路)の勾配情報と検出された実勾配とを照合する。そして、走行道路の実勾配との相関の度合いがより小さい道路を候補道路から特定し、この特定結果に基づいて対応する地図上の道路に自車位置を表示する。
本実施形態では、道路情報の勾配情報と合致しない実勾配が検出される可能がある区間を抑止区間として設定し、車両が抑止区間を走行中には走行道路の実勾配に基づくマップマッチング処理を行わない。
【0013】
(2)実施形態の詳細
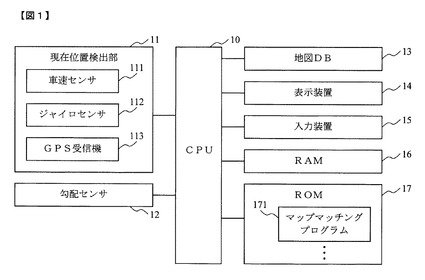
図1は、本実施形態におけるナビゲーション装置の構成を示した図である。
図1に示すように、ナビゲーション装置は、各種プログラムやデータに従ってナビゲーション装置全体を制御するCPU(中央演算処理装置)10を備えており、CPU10には現在位置検出部11、勾配センサ12、地図DB(データベース)13、表示装置14、入力装置15、RAM16、ROM17が接続されている。
【0014】
CPU10は、その内部に少量で高速な記憶装置であるレジスタを備え、このレジスタには、例えば、マップマッチング処理における条件の判定結果を示す上下道判定フラグ、抑止区間フラグの情報が格納される。
現在位置検出部11は、ナビゲーション装置が搭載される車両の現在位置を検出するための車速センサ111、ジャイロセンサ112、GPS受信機113を備えている。
車速センサ111は、例えば、車輪の回転速度に基づいて車速を検出する装置である。ナビゲーション装置では、この車速センサ111の検出結果に基づいて車両の移動距離を測定する。つまり車速センサ111は、車両の移動距離を測定する距離測定手段として機能する。本実施形態では、この車速センサ111を分岐点からの移動距離を測定する際にも用いる。
【0015】
ジャイロセンサ112は、車両の走行方向の変化を検出する装置であり、基準角度(絶対方位)に対して相対的に変化した角度を検出する方位検出手段として機能する。
GPS受信機113は、人工衛星を利用して位置を測定するGPS(グローバル・ポジショニング・システム)から情報を受信する装置である。
ナビゲーション装置では、車速センサ111とジャイロセンサ112を用いた自立航法と、GPS受信機113を用いた衛星航法とを併用して車両位置を検出するように構成されているが、自立航法又は衛星航法のいずれか一方を用いて車両位置を検出するようにしてもよい。
【0016】
勾配センサ12は、道路の勾配(傾斜角)を検出するセンサである。ナビゲーション装置では、勾配センサ12により検出された道路の傾斜角と所定の閾値とを比較することによって、走行中の道路の勾配状態を判定する。
詳しくは、検出された傾斜角θが閾値α未満の場合には下り勾配(『下』)と判定し、傾斜角θが閾値α以上閾値β未満である場合には平坦(『平』)と判定し、傾斜角θが閾値β以上である場合には上り勾配(『上』)と判定する。なお、勾配状態の判定基準となる閾値α、βは、任意の値に設定することができる。
【0017】
地図DB13は、地図表示に必要な地図データや、目的地までの経路探索やマップマッチング処理時などに用いられるノード情報、道路情報、抑止区間情報などを格納する記憶装置である。
ここで、地図DB13に格納される情報について説明する。
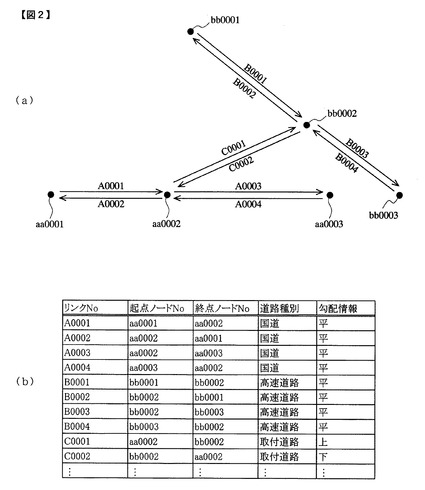
図2(a)は、ノード情報及び道路情報を説明するための図である。
ノード情報は、図2(a)に黒点で示した、交差点、分岐点、合流点、道路形状を示すための補間点などを示すノードに関する情報である。ノード情報には、例えば、ノードの位置情報や地図データの対応情報がノードの識別コード(ノードNo)ごとに示されている。
【0018】
道路情報は、図2(a)に矢印で示した、2点のノード間を結ぶ道路区間をベクトルで表したリンクに関する情報である。
図2(b)は、道路情報の一例を示した図である。
道路情報には、図2(b)に示すように、例えば、起点ノードNo、終点ノードNo、道路種別(高速道路、国道、都道府県道、市町村道、取付道路など)、勾配情報(上、平、下)などがリンクの識別コード(リンクNo)ごとに示されている。
なお、道路種別で示されている取付道路とは、一般道路(国道、県道など)と高速道路のように高低差のある道路間をつなぐ道路を示す。なお、この取付道路は、勾配情報を有する勾配道路である。
また、本実施形態では、ノード間のリンク情報として、方向の異なる2つのリンクベクトルを別々設定しているが、リンク情報の設定方法はこれに限定されるものではない。例えば、ノード間のリンクを1つのリンクベクトルで表し、そのリンクベクトルに対して正方向と逆方向の属性を付したものを道路情報として格納するようにしてもよい。
【0019】
次に、抑止区間情報について説明する。
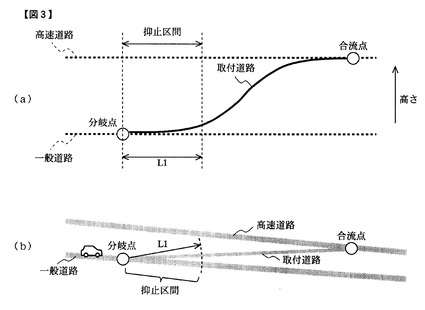
図3は、抑止区間を説明するための図である。
ナビゲーション装置では、取付道路との分岐点を通過した際に取付道路へ進入したか否かを判断するために、実勾配に基づく走行道路を特定する上下道判定処理を行う。
この上下道判定処理では、勾配センサ12で検出された走行道路の実勾配を、走行候補の道路(リンク)の勾配情報と照合し、実勾配と勾配情報が一致する候補道路、又は実勾配との相関値が最も小さい候補道路を走行中の道路に特定する。
しかし実際の取付道路では、図3(a)に示すように分岐点の近傍には勾配が現れない区間が存在する場合がある。そのため、実際に道路情報に記録されている勾配情報と一致する実勾配を検出するまでには、ある程度の距離を走行する必要がある。
【0020】
そこで本実施形態では、上下道判定処理の精度を上げるために実勾配を検出しない抑止区間(抑止区域)が設定されている。
本実施形態では、図3に示すように、取付道路との分岐点から半径L1未満の区間が抑止区間として設定されている。
抑止区間の判定基準となるL1の値は任意に設定可能であり、この設定値は全ての取付道路との分岐点で共通となっている。
地図DB13には、抑止区間情報として上述した抑止区間の設定情報が格納されている。
【0021】
表示装置14は、例えば、現在地周辺の地図画面(例えば、自車位置がマークされた画面)、自車位置情報、経路案内情報、目的地の設定画面、各種メニュー画面などCPU10の処理結果を表示する出力装置である。
入力装置15は、利用者により目的地、通過地点、探索条件等のデータを入力する装置である。
本実施形態では、表示装置14及び入力装置15は、表示・入力の両機能を有するタッチパネル(タッチスクリーン)で構成されているが、入力装置15は、ジョグダイアル等のリモートコントローラ等によって構成するようにしてもよい。
また、図示されていないが、出力装置として、経路案内を音声で出力するスピーカや処理データを印字出力するプリンタを別途設けるようにしてもよい。
【0022】
RAM16は、CPU10の作業領域として機能する記憶領域である。
ROM17は、ナビゲーション装置を機能させるための基本的なプログラムやパラメータなどが記憶された読み取り専用メモリである。ROM17には、例えば、現在走行中の道路及び該道路上の位置を特定するマップマッチングプログラム171、目的地までの経路を探索する経路探索プログラムなどが記憶されている。
なお、マッチングプログラム171は、CD−ROM、DVD−ROM、ハードディスク、フラッシュメモリなどの記憶媒体に保存されたプログラムを、RAM16にロードして実行させるようにしてもよい。
【0023】
次に、以上のように構成されたナビゲーション装置における、取付道路との分岐点の通過が検出された場合に実行する上下道判定処理について説明する。
本実施形態では、取付道路との分岐点の通過を検出した場合、実際の車両の走行位置(走行道路)と、地図上の道路に表示される自車位置とのマッチングを上下道判定処理により行う。上下道判定処理を実行するプログラムは、マップマッチングプログラム171の一部に含まれている。
ここでは、一般道路Aを走行中の車両が、一般道路Aと高速道路Bをつなぐ取付道路Cとの分岐点を通過する場合を例に説明する。
なお、一般道路Aと取付道路Cとの分岐点は図2(a)に示すノードNo.aa0002に対応し、取付道路Cと高速道路Bとの合流点はノードNo.bb0002に対応し、分岐点から進入する取付道路CはリンクNo.C0001に対応する。
【0024】
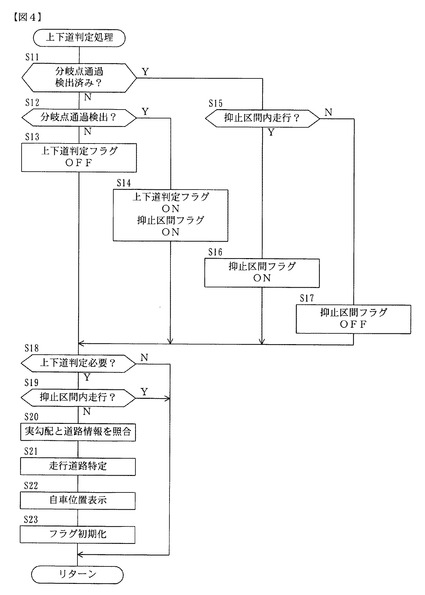
図4は、上下道判定処理の手順を示したフローチャートである。
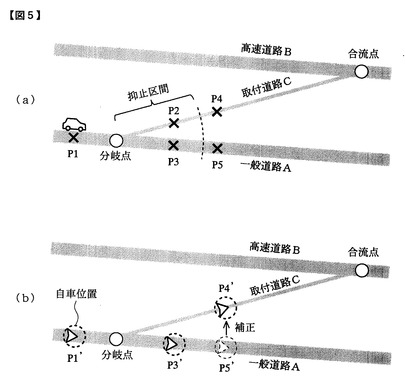
また、図5は、上下道判定処理を説明するための図である。
CPU10は、内蔵されているレジスタを読み出し、上下道判定フラグの状態に基づいて、取付道路との分岐点の通過が検出済みであるか否かを判断する(ステップ11)。詳しくはCPU10は、上下道判定フラグがON状態(立っている状態)である場合、分岐点の通過が検出済みと判断し、上下道判定フラグがOFF状態(立っていない状態)である場合、分岐点の通過が未検出と判断する。
分岐点の通過が未検出である場合(ステップ11;N)、CPU10は、当該車両が取付道路との分岐点を通過したか否かの判断を行う(ステップ12)。
ここでは、現在位置検出部11により検出された車両の位置情報と地図DB13に格納されている道路情報とに基づいて、取付道路に対応するリンクの起点となっているノードを車両が通過したか否かを判断する。
【0025】
例えば、図5(a)に示す分岐点の手前のP1を車両が走行中である場合には、取付道路との分岐点の通過が検出されない。
本実施形態では、取付道路との分岐点が存在しない区間を走行中は、道路の勾配を考慮しない、現在位置検出部11により検出された車両の位置情報と地図データに基づいて行われる通常のマップマッチング処理の結果に基づいて、地図上の道路に自車位置が表示される。
従って、P1の位置を車両が走行中である場合には、現在位置検出部11により検出されるP1の位置情報に基づいて、図5(b)に示す地図上の一般道路AのP1’に自車位置(自車位置マーク)が表示される。
【0026】
取付道路との分岐点の通過が検出されない場合(ステップ12;N)、CPU10は、レジスタの上下道判定フラグのOFF状態を維持する(ステップ13)。
取付道路との分岐点の通過が検出された場合(ステップ12;Y)、CPU10は、レジスタの上下道判定フラグをON状態に切り替え、さらに抑止区間フラグをON状態に切り替える(ステップ14)。
抑止区間フラグは、当該車両が抑止区間を走行中であることを示すフラグである。抑止区間は分岐点から始まるため、ここでは分岐点の通過が検出された時点で抑止区間フラグがON状態に切り替えられる設定となっている。
【0027】
ステップ11の処理において、取付道路との分岐点の通過が検出済みと判断された場合(ステップ11;Y)、CPU10は、車両が抑止区間内を走行中か否かを判断する(ステップ15)。
ここでは、車速センサ111の検出結果に基づいて分岐点からの移動距離を測定し、この測定結果に基づいて車両が抑止区間内を走行中か否かを判断する。
車両が抑止区間内を走行中である場合(ステップ15;Y)、CPU10は、レジスタの抑止区間フラグのON状態を維持する(ステップ16)。なお、ここではレジスタの上下道判定フラグのON状態も維持する。
車両が抑止区間内を走行中でない場合(ステップ15;N)、即ち、抑止区間を外れた場合、CPU10は、抑止区間フラグをOFF状態に切り替える(ステップ17)。なお、ここではレジスタの上下道判定フラグのON状態は維持する。
【0028】
例えば、図5(a)に示すP2又はP3を車両が走行中である場合には、車両が抑止区間内を走行中であると判断される。
本実施形態では、車両が抑止区間を走行中は、分岐点を通過する前に走行していた道路(ここでは一般道路A)に自車位置が表示される。
従って、P2又はP3の位置を車両が走行中である場合には、暫定的に図5(b)に示す地図上の一般道路AのP3’に自車位置が表示される。
但し、ナビゲーション装置は、P2及びP3の双方に対応する地図上の位置を、自車位置のマッチング候補として認識している。
【0029】
続いてCPU10は、内蔵されているレジスタを読み出し、上下道判定フラグの状態に基づいて、上下道判定によるマップマッチング処理が必要か否かを判断する(ステップ18)。CPU10は、上下道判定フラグがON状態である場合、上下道判定によるマップマッチング処理が必要と判断し、上下道判定フラグがOFF状態である場合、上下道判定によるマップマッチング処理が不要と判断する。
上下道判定によるマップマッチング処理が必要である場合(ステップ18;Y)、CPU10は、抑止区間フラグの状態に基づいて、抑止区間内を走行中であるか否かを判断する(ステップ19)。CPU10は、抑止区間フラグがON状態である場合、抑止区間内を走行中であると判断し、抑止区間フラグがOFF状態である場合、抑止区間外を走行中であると判断する。
【0030】
車両が抑止区間内を走行中でない場合(ステップ19;N)、CPU10は、現在走行中の道路の実勾配の状態を判定し、この判定結果と道路情報とを照合する(ステップ20)。詳しくは、CPU10は、勾配センサ12の検出した道路の傾斜角に基づいて現在走行中の道路の実勾配の状態を判定する。そして実勾配の判定結果と、ノードNo.aa0002から分岐するリンクの勾配情報とを照合する。ここでは、実勾配の判定結果をリンクNo.A0003(一般道路A)及びリンクNo.C0001(取付道路C)の勾配情報と照合する。
CPU10は、勾配情報との照合結果に基づいて走行中の地図上の道路を特定する(ステップ21)。ここでは、リンクNo.A0003及びリンクNo.C0001のうち、実勾配の判定結果(『上』、『平』又は『下』)と勾配情報が一致するリンクに対応する道路を、走行中の地図上の道路に特定する。
続いてCPU10は、道路の特定結果と分岐点からの走行距離に基づいて地図上の道路に自車位置を表示する(ステップ22)。
【0031】
例えば、図5(a)に示す抑止区間外のP4(取付道路C)を車両が走行中である場合には、勾配センサ12の検出した道路の傾斜角に基づいて勾配『上』が判定される。
リンクNo.A0003(一般道路A)の勾配情報は『平』であり、リンクNo.C0001(取付道路C)の勾配情報は『上』である。
従って、CPU10は、リンクNo.C0001(取付道路C)を走行中の地図上の道路に特定し、この特定結果に基づいて地図上の自車位置を、図5(b)に示すP5’(一般道路A)からP4’(取付道路C)に補正する。
また、例えば、図5(a)に示す抑止区間外のP5(一般道路A)を車両が走行中である場合には、勾配センサ12に基づいて勾配『平』が判定され、リンクNo.A0003(一般道路A)が走行中の地図上の道路に特定される。この場合には、一般道路A上での自車位置の表示を継続する。
【0032】
CPU10は、上下道判定フラグ及び抑止区間フラグの状態をOFFに切り替え、即ちフラグを初期化し(ステップ23)、ステップ11の処理にリターンする。
また、ステップ18の処理において、上下道判定によるマップマッチング処理が不要であると判断された場合(ステップ18;N)、及び、ステップ19の処理において、車両が抑止区間内を走行中であると判断された場合(ステップ19;Y)、CPU11はステップ11の処理にリターンする。
【0033】
このような道路の勾配を考慮したマップマッチング処理は、通常のマップマッチング処理と並行して行われる。そして、取付道路と他の候補道路とが通常のマップマッチング処理の誤差の範囲に存在する場合、即ち、取付道路が他の候補道路と近接している場合、上述した道路の勾配を考慮したマップマッチング処理に基づく地図上の自車位置を補正するように構成されている。
例えば、高速道路と該高速道路から分岐する取付道路とが並走している場合など、車両の位置情報に基づく通常のマップマッチング処理において正確な走行道路の判定が困難な場合に、上述した道路の勾配を考慮したマップマッチング処理を行う。
【0034】
このように本実施形態によれば、抑止区間外を走行中に検出された走行道路の実勾配と道路情報とに基づいて、走行中の地図上の道路を特定することにより、より精度の高い走行中の道路の特定処理を行うことができる。これにより誤った自車位置が地図上に表示されることを抑制できる。
また、本実施形態では、車両が抑止区間から外れたことを検出した時点で、実勾配に基づく自車位置を表示する道路の特定処理を一度だけ行い、その後は再度取付道路との分岐点の通過が検出されるまで実勾配に基づく道路の特定処理は行わない。
これにより、取付道路における合流点付近の平坦な区間を走行中に、誤った自車位置が特定されることを抑制できる。
【0035】
上述した実施形態では、抑止区間の設定距離(L1)が全ての取付道路との分岐点で共通となるように設定されている。
しかしながら、取付道路の長さや勾配が出現する位置などは取付道路ごとに異なるため、取付道路との分岐点ごとに抑止区間の距離を設定するようにしてもよい。
抑止区間の設定パターンを複数設定し、取付道路との分岐点ごとに取付道路の長さに応じて設定パターンを割り付けるようにしてもよい。例えば、取付道路長が500m未満の場合には設定パターンA(100m)を割り付け、取付道路長が500m以上1000m未満の場合には、設定パターンB(200m)を割り付けるようにする。
抑止区間の設定距離を取付道路の長さに対する割合(比率)で設定するようにしてもよい。例えば、取付道路の長さの20%を抑止区間の設定距離(L1)に設定するようにしてもよい。
なお、分岐点から実際に勾配が出現する位置までの距離の実測データが存在する取付道路との分岐点には、実測データに基づく抑止区間を設定することが好ましい。
【0036】
また、上述した本実施形態では、車両が抑止区間を走行中は、分岐点を通過する前に走行していた道路上に自車位置を表示するように構成されているが、車両が抑止区間を走行中の表示形態はこれに限定されるものではない。
例えば、車両が抑止区間を走行中は、地図上の抑止区間の開始点、取付道路Cとの分岐点上に自車位置を表示し、ステップ22で道路の特定結果と分岐点からの走行距離に基づいて地図上の道路に自車位置を表示する際に、自車位置を分岐点上から移動させるようにしてもよい。
【0037】
(変形例)
上述した本実施形態では、車両が抑止区間から外れたことを検出した時点で、実勾配に基づく自車位置を表示する道路の特定処理を一度だけ行う。そして一旦道路の特定処理が行われると、再度取付道路との分岐点の通過が検出されるまで実勾配に基づく道路の特定処理は行われない。
しかしながら、抑止区間外の実勾配に基づく道路の特定方法は、これに限定されるものではない。
そこで変形例では、一度だけでなく、抑止区間外を走行期間中に継続して実勾配に基づく道路の特定処理を行う方法について説明する。
【0038】
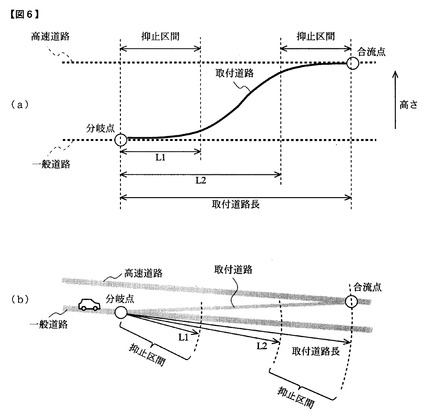
図6は、変形例における抑止区間を説明するための図である。
実際の取付道路では、図6(a)に示すように分岐点の近傍だけでなく、合流点の近傍にも勾配が現れない区間が存在する。
そこで変形例では、実勾配を検出しない抑止区間を、さらに合流点の近傍が含まれる領域に設定する。
詳しくは、図6に示すように抑止区間として、取付道路との分岐点から半径L1未満の区間、及び、分岐点から半径L2以上取付道路長以下の区間が設定されている。
即ち、分岐点から半径L1以上L2未満の区間が上下道判定処理の判定基準となる実勾配の検出区間に設定されている。
抑止区間の判定基準となるL1、L2の値は任意に設定可能であり、この設定値は全て取付道路との分岐点で共通となっているが、上述した本実施形態と同様に、取付道路との分岐点ごとに抑止区間の距離を設定するようにしてもよい。
【0039】
そして変形例では、CPU10は、車速センサ111の検出結果に基づいて分岐点からの移動距離を測定し、この測定結果に基づいて車両が分岐点から半径L1以上L2未満の区間(抑止区間外)を走行している期間を検出する。
CPU10は、検出された抑止区間外を走行している期間において、図4のステップ20〜22の一連の処理を継続して行う。
詳しくは、抑止区間外を走行している期間中、走行中の道路の実勾配の判定処理、判定結果と道路情報との照合処理、照合結果に基づく走行中の地図上の道路の特定処理、特定結果に基づく地図上の自車位置の表示処理(補正処理)、これら一連の処理を複数回行う。
なお、後半の抑止区間を走行中は、車両の位置情報に基づく通常のマップマッチング処理ではなく、抑止区間外を走行している期間に行われた地図上の道路の特定処理結果に基づいて地図上の道路に自車位置を表示させる。
【0040】
ここでは走行中の地図上の道路が特定される都度、この特定結果に基づく地図上の自車位置の表示処理(補正処理)が行われるようになっているが、自車位置の表示処理(補正処理)を行うタイミングはこれに限定されるものではない。
例えば、抑止区間外を走行している期間中における走行中の道路の特定結果を集計し、後半の抑止区間に進入した際に、集計結果に基づいて最終的に最も確からしいと判断される地図上の道路に自車位置を表示(補正)するようにしてもよい。
変形例によれば、さらに後半の抑止区間を設けることにより、道路の特定処理の基準となる実勾配の検出区間を適切に設定することができる。
【0041】
上述した実施形態及び変形例では、抑止区間外を走行中に勾配センサ12で検出された走行道路の実勾配と道路情報との照合結果に基づいて、走行中の地図上の道路を特定するように構成されている。走行中の地図上の道路の特定精度を高めるために、さらに走行中の車両の高度情報を考慮するようにしてもよい。
詳しくは、高度センサ(高度計)を用いて走行車両の分岐点を基準とする高度を検出し、検出された車両の高度情報と勾配センサ12の検出結果に基づいて走行中の道路の勾配状態を判定する。そして勾配状態の判定結果と道路情報との照合結果に基づいて走行中の地図上の道路を特定するようにしてもよい。
なお、走行車両の分岐点を基準とする高度は、取付道路との分岐点の通過が検出された後に、勾配センサ12により検出された傾斜角θと走行距離に基づいて算出するようにしてもよい。
【0042】
上述した本実施の形態では、走行中の道路の実勾配と道路情報の有する勾配情報とに基づいて、車両が存在する道路を特定する方法を、車両が取付道路との分岐点を通過した場合を例にとり説明した。しかしながら、上述したような抑止区間を考慮した自車位置の特定方法を適用可能な箇所は、取付道路との分岐点に限定されるものではない。
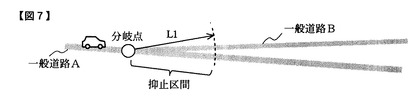
図7は、本実施の形態に係る自車位置の特定方法の他の適用箇所を示した図である。
例えば、図7に示すように、勾配情報を有する一般道路Bとの分岐点を通過した場合においても、抑止区間を考慮した自車位置の特定方法を適用するようにしてもよい。
また、上述した実施形態及び変形例では、取付道路によってつながれる一般道路と高速道路とが並行している場合を例に説明したが、取付道路の配置環境はこれに限定されるものではない。例えば、交差する一般道路と高速道路とをつなぐ取付道路であっても抑止区間を考慮した自車位置の特定方法を適用することは可能である。
【図面の簡単な説明】
【0043】
【図1】本実施形態におけるナビゲーション装置の構成を示した図である。
【図2】(a)はノード情報及び道路情報を説明するための図であり、(b)は道路情報の一例を示した図である。
【図3】抑止区間を説明するための図である。
【図4】上下道判定処理の手順を示したフローチャートである。
【図5】上下道判定処理を説明するための図である。
【図6】変形例における抑止区間を説明するための図である。
【図7】本実施の形態に係る自車位置の特定方法の他の適用箇所を示した図である。
【図8】(a)は取付道路の配置例を示した図であり、(b)は取付道路の実勾配の一例を示した図であり、(c)は取付道路の他の配置例を示した図である。
【符号の説明】
【0044】
10 CPU
11 現在位置検出部
12 勾配センサ
13 地図DB
14 表示装置
15 入力装置
16 RAM
17 ROM
111 車速センサ
112 ジャイロセンサ
113 GPS受信機
171 マップマッチングプログラム
【技術分野】
【0001】
本発明は、ナビゲーション装置及びナビゲーション用プログラムに関し、例えば、地図上に自車位置を表示する技術に関する。
【背景技術】
【0002】
目的地までの走行経路を探索して経路誘導を行うナビゲーション装置が広く普及している。
ナビゲーション装置には、GPS(全地球測位システム)等を用いて算出された車両の位置情報と、地図データとに基づいてマップマッチング処理を行い、地図上の道路に自車位置を表示させる機能が設けられている。
このようなナビゲーション装置において、実際の車両の現在位置と、地図上に表示される自車位置とのマッチング精度を向上させるための技術が下記の特許文献に提案されている。
【特許文献1】特開平10−253373号公報
【0003】
特許文献1記載技術では、車両に設けられたセンサで走行中の道路の勾配を検出し、検出された道路の勾配と、地図データベースに格納されている道路の勾配情報との照合結果に基づいて、地図上に表示する自車位置の補正を行うようにしている。
図8(a)は、取付道路の配置例を示した図である。
例えば、図8(a)に示すような一般道路Aと高速道路Bのように高低差のある道路間をつなぐ道路(以下、取付道路Cとする)へ進入したか否かの判別も、上述したような道路の勾配情報に基づいて行い、その判別結果に基づいて走行中の地図上の道路を特定する。
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、地図データベースに格納されている取付道路Cに対する勾配情報を、細分された区間ごとの情報として格納させると、データ収集の手間が掛かるうえデータ量の増大を引き起こす。そこで、地図データベースには、格納するデータ量を低減させるために、大まかな勾配情報として、分岐点から合流点まで同一の勾配情報を格納したものがある。例えば、一般道路Aと高速道路Bとをつなぐ取付道路Cの場合、一般道路Aの分岐点から高速道路Bの合流点までの勾配情報として『上』が設定されている。なお、勾配情報は、『上・平・下』の3段階で定義されている。
図8(b)は、取付道路の実勾配の一例を示した図である。
しかしながら実際の取付道路Cは、図8(b)に示すように分岐点の直後(区間a)には勾配のない平らな部分が存在する。
そのため、勾配情報『上』の取付道路Cに進入した車両であっても、区間aを走行する車両のセンサは、その区間の勾配を『平』と判断してしまう。
【0005】
このように地図データベースに格納されている取付道路Cの勾配情報『上』と、実際のセンサの検出結果『平』が一致しない場合、ナビゲーション装置は、センサの検出結果『平』に対応する道路(ここでは、一般道路A)を走行中の道路と特定し、該道路上に自車位置を表示してしまう。
つまり、実際に勾配が現れない区間aでは、誤った自車位置の特定がなされ、これにより地図上に表示される自車位置と実際の車両の現在位置とのマッチング精度が低下するおそれがあった。
【0006】
図8(c)は、取付道路の他の配置例を示した図である。
例えば、図8(c)に示す高速道路Bから取付道路Cに実際に進入した場合であっても、取付道路Cにおける実際に勾配が現れない区間で同様の誤判定がなされ、高速道路Bに自車位置が特定される場合があった。
【0007】
また、目的地までの案内経路に従って走行している途中で、上述したような誤った自車位置の特定がなされると、ナビゲーション装置は、車両が案内経路から外れたと判断する。
自車が案内経路を逸脱した時に目的地までの案内経路を再設定するリルート機能が有効である場合、ナビゲーション装置は、誤った自車位置から目的地までの案内経路を再設定してしまう。つまり、誤って特定された自車位置の影響が案内経路にまで及んでしまう。
【0008】
そこで本発明は、道路の勾配情報に基づく走行中の道路の特定処理の精度をより向上させることを目的とする。
【課題を解決するための手段】
【0009】
(1)前記目的を達成するために、請求項1に記載の発明では、道路と該道路の勾配情報とを関連付けた道路情報を有する地図データを記憶する地図データ記憶手段と、前記地図データに勾配情報が記憶された勾配道路との分岐点の通過を検出する分岐通過検出手段と、前記分岐点の通過を検出した後、前記分岐点に基づいて定められた所定の抑止区域外を走行中に走行道路の実勾配を検出する実勾配検出手段と、前記検出した走行道路の実勾配と前記道路情報とに基づいて、走行中の地図上の道路を特定する道路特定手段と、前記特定された道路上に自車両の現在位置を表示する自車位置表示手段と、を具備することを特徴とするナビゲーション装置を提供する。
(2)請求項2に記載の発明では、前記分岐点からの距離を測定する距離測定手段を備え、前記実勾配検出手段は、前記分岐点からの距離に基づいて設定された前記所定の抑止区域外を走行中に走行道路の実勾配を検出することを特徴とする請求項1記載のナビゲーション装置を提供する。
(3)請求項3に記載の発明では、前記所定の抑止区域は、前記勾配道路における前記分岐点及び他の道路との合流点のうち少なくとも一方から所定の距離の区間を含むことを特徴とする請求項1又は請求項2記載のナビゲーション装置を提供する。
(4)請求項4に記載の発明では、前記所定の抑止区域は、前記勾配道路との分岐点ごとに、該勾配道路に基づいて設定されていることを特徴とする請求項1から請求項3のいずれか1の請求項に記載のナビゲーション装置を提供する。
(5)請求項5に記載の発明では、前記勾配道路は、高低差のある道路間をつなぐ取付道路であることを特徴とする請求項1から請求項4のいずれか1の請求項に記載のナビゲーション装置を提供する。
(6)請求項6に記載の発明では、前記分岐点を基準とする走行高度を検出する高度検出手段を備え、前記道路特定手段は、さらに前記検出された走行高度に基づいて走行中の地図上の道路を特定することを特徴とする請求項1から請求項5のいずれか1の請求項に記載のナビゲーション装置を提供する。
(7)請求項7に記載の発明では、コンピュータを、前記地図データに勾配情報が記憶された勾配道路との分岐点の通過を検出する分岐通過検出手段と、前記分岐点の通過を検出した後、前記分岐点に基づいて定められた所定の抑止区域外を走行中に走行道路の実勾配を検出する実勾配検出手段と、地図データ記憶手段に記憶された道路と該道路の勾配情報とを関連付けた道路情報と、前記検出した走行道路の実勾配とに基づいて、走行中の地図上の道路を特定する道路特定手段と、前記特定された道路上に自車両の現在位置を表示する自車位置表示手段と、して機能させることを特徴とするナビゲーション用プログラムを提供する。
【発明の効果】
【0010】
本発明によれば、所定の抑止区域外において走行道路の実勾配を検出することにより、この検出された実勾配に基づいて、より精度の高い走行中の道路の特定処理を行うことができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明のナビゲーション装置における好適な実施の形態について、図1から図7を参照して詳細に説明する。
(1)実施形態の概要
ナビゲーション装置は、車両の位置情報や操作情報、環境情報等と地図データとに基づいて、車両が存在する道路を特定するマップマッチング機能を備えている。
本実施形態では、走行中の道路の実勾配と道路情報の有する勾配情報とに基づいて、車両が存在する道路を特定する方法について説明する。
ここでは、一般道路を走行中に取付道路との分岐点を通過した際、取付道路に進入したか、継続して一般道路を走行しているかを判断する場合について説明する。
ナビゲーション装置には、道路ごとの勾配情報を示した道路情報、抑止区間の設定情報が予め記憶されている。
抑止区間とは、道路の判定基準となる走行道路の実勾配を検出させない区間であり、例えば、分岐点から半径L1未満の区域に設定されている。
【0012】
ナビゲーション装置のCPUは、取付道路との分岐点の通過を検出すると、分岐点からの走行距離に基づいて車両が抑止区間を走行中であるか否かを判断する。
車両が抑止区間を外れると、CPUは走行中の道路の実勾配を検出し、特定対象の候補道路(取付道路、一般道路)の勾配情報と検出された実勾配とを照合する。そして、走行道路の実勾配との相関の度合いがより小さい道路を候補道路から特定し、この特定結果に基づいて対応する地図上の道路に自車位置を表示する。
本実施形態では、道路情報の勾配情報と合致しない実勾配が検出される可能がある区間を抑止区間として設定し、車両が抑止区間を走行中には走行道路の実勾配に基づくマップマッチング処理を行わない。
【0013】
(2)実施形態の詳細
図1は、本実施形態におけるナビゲーション装置の構成を示した図である。
図1に示すように、ナビゲーション装置は、各種プログラムやデータに従ってナビゲーション装置全体を制御するCPU(中央演算処理装置)10を備えており、CPU10には現在位置検出部11、勾配センサ12、地図DB(データベース)13、表示装置14、入力装置15、RAM16、ROM17が接続されている。
【0014】
CPU10は、その内部に少量で高速な記憶装置であるレジスタを備え、このレジスタには、例えば、マップマッチング処理における条件の判定結果を示す上下道判定フラグ、抑止区間フラグの情報が格納される。
現在位置検出部11は、ナビゲーション装置が搭載される車両の現在位置を検出するための車速センサ111、ジャイロセンサ112、GPS受信機113を備えている。
車速センサ111は、例えば、車輪の回転速度に基づいて車速を検出する装置である。ナビゲーション装置では、この車速センサ111の検出結果に基づいて車両の移動距離を測定する。つまり車速センサ111は、車両の移動距離を測定する距離測定手段として機能する。本実施形態では、この車速センサ111を分岐点からの移動距離を測定する際にも用いる。
【0015】
ジャイロセンサ112は、車両の走行方向の変化を検出する装置であり、基準角度(絶対方位)に対して相対的に変化した角度を検出する方位検出手段として機能する。
GPS受信機113は、人工衛星を利用して位置を測定するGPS(グローバル・ポジショニング・システム)から情報を受信する装置である。
ナビゲーション装置では、車速センサ111とジャイロセンサ112を用いた自立航法と、GPS受信機113を用いた衛星航法とを併用して車両位置を検出するように構成されているが、自立航法又は衛星航法のいずれか一方を用いて車両位置を検出するようにしてもよい。
【0016】
勾配センサ12は、道路の勾配(傾斜角)を検出するセンサである。ナビゲーション装置では、勾配センサ12により検出された道路の傾斜角と所定の閾値とを比較することによって、走行中の道路の勾配状態を判定する。
詳しくは、検出された傾斜角θが閾値α未満の場合には下り勾配(『下』)と判定し、傾斜角θが閾値α以上閾値β未満である場合には平坦(『平』)と判定し、傾斜角θが閾値β以上である場合には上り勾配(『上』)と判定する。なお、勾配状態の判定基準となる閾値α、βは、任意の値に設定することができる。
【0017】
地図DB13は、地図表示に必要な地図データや、目的地までの経路探索やマップマッチング処理時などに用いられるノード情報、道路情報、抑止区間情報などを格納する記憶装置である。
ここで、地図DB13に格納される情報について説明する。
図2(a)は、ノード情報及び道路情報を説明するための図である。
ノード情報は、図2(a)に黒点で示した、交差点、分岐点、合流点、道路形状を示すための補間点などを示すノードに関する情報である。ノード情報には、例えば、ノードの位置情報や地図データの対応情報がノードの識別コード(ノードNo)ごとに示されている。
【0018】
道路情報は、図2(a)に矢印で示した、2点のノード間を結ぶ道路区間をベクトルで表したリンクに関する情報である。
図2(b)は、道路情報の一例を示した図である。
道路情報には、図2(b)に示すように、例えば、起点ノードNo、終点ノードNo、道路種別(高速道路、国道、都道府県道、市町村道、取付道路など)、勾配情報(上、平、下)などがリンクの識別コード(リンクNo)ごとに示されている。
なお、道路種別で示されている取付道路とは、一般道路(国道、県道など)と高速道路のように高低差のある道路間をつなぐ道路を示す。なお、この取付道路は、勾配情報を有する勾配道路である。
また、本実施形態では、ノード間のリンク情報として、方向の異なる2つのリンクベクトルを別々設定しているが、リンク情報の設定方法はこれに限定されるものではない。例えば、ノード間のリンクを1つのリンクベクトルで表し、そのリンクベクトルに対して正方向と逆方向の属性を付したものを道路情報として格納するようにしてもよい。
【0019】
次に、抑止区間情報について説明する。
図3は、抑止区間を説明するための図である。
ナビゲーション装置では、取付道路との分岐点を通過した際に取付道路へ進入したか否かを判断するために、実勾配に基づく走行道路を特定する上下道判定処理を行う。
この上下道判定処理では、勾配センサ12で検出された走行道路の実勾配を、走行候補の道路(リンク)の勾配情報と照合し、実勾配と勾配情報が一致する候補道路、又は実勾配との相関値が最も小さい候補道路を走行中の道路に特定する。
しかし実際の取付道路では、図3(a)に示すように分岐点の近傍には勾配が現れない区間が存在する場合がある。そのため、実際に道路情報に記録されている勾配情報と一致する実勾配を検出するまでには、ある程度の距離を走行する必要がある。
【0020】
そこで本実施形態では、上下道判定処理の精度を上げるために実勾配を検出しない抑止区間(抑止区域)が設定されている。
本実施形態では、図3に示すように、取付道路との分岐点から半径L1未満の区間が抑止区間として設定されている。
抑止区間の判定基準となるL1の値は任意に設定可能であり、この設定値は全ての取付道路との分岐点で共通となっている。
地図DB13には、抑止区間情報として上述した抑止区間の設定情報が格納されている。
【0021】
表示装置14は、例えば、現在地周辺の地図画面(例えば、自車位置がマークされた画面)、自車位置情報、経路案内情報、目的地の設定画面、各種メニュー画面などCPU10の処理結果を表示する出力装置である。
入力装置15は、利用者により目的地、通過地点、探索条件等のデータを入力する装置である。
本実施形態では、表示装置14及び入力装置15は、表示・入力の両機能を有するタッチパネル(タッチスクリーン)で構成されているが、入力装置15は、ジョグダイアル等のリモートコントローラ等によって構成するようにしてもよい。
また、図示されていないが、出力装置として、経路案内を音声で出力するスピーカや処理データを印字出力するプリンタを別途設けるようにしてもよい。
【0022】
RAM16は、CPU10の作業領域として機能する記憶領域である。
ROM17は、ナビゲーション装置を機能させるための基本的なプログラムやパラメータなどが記憶された読み取り専用メモリである。ROM17には、例えば、現在走行中の道路及び該道路上の位置を特定するマップマッチングプログラム171、目的地までの経路を探索する経路探索プログラムなどが記憶されている。
なお、マッチングプログラム171は、CD−ROM、DVD−ROM、ハードディスク、フラッシュメモリなどの記憶媒体に保存されたプログラムを、RAM16にロードして実行させるようにしてもよい。
【0023】
次に、以上のように構成されたナビゲーション装置における、取付道路との分岐点の通過が検出された場合に実行する上下道判定処理について説明する。
本実施形態では、取付道路との分岐点の通過を検出した場合、実際の車両の走行位置(走行道路)と、地図上の道路に表示される自車位置とのマッチングを上下道判定処理により行う。上下道判定処理を実行するプログラムは、マップマッチングプログラム171の一部に含まれている。
ここでは、一般道路Aを走行中の車両が、一般道路Aと高速道路Bをつなぐ取付道路Cとの分岐点を通過する場合を例に説明する。
なお、一般道路Aと取付道路Cとの分岐点は図2(a)に示すノードNo.aa0002に対応し、取付道路Cと高速道路Bとの合流点はノードNo.bb0002に対応し、分岐点から進入する取付道路CはリンクNo.C0001に対応する。
【0024】
図4は、上下道判定処理の手順を示したフローチャートである。
また、図5は、上下道判定処理を説明するための図である。
CPU10は、内蔵されているレジスタを読み出し、上下道判定フラグの状態に基づいて、取付道路との分岐点の通過が検出済みであるか否かを判断する(ステップ11)。詳しくはCPU10は、上下道判定フラグがON状態(立っている状態)である場合、分岐点の通過が検出済みと判断し、上下道判定フラグがOFF状態(立っていない状態)である場合、分岐点の通過が未検出と判断する。
分岐点の通過が未検出である場合(ステップ11;N)、CPU10は、当該車両が取付道路との分岐点を通過したか否かの判断を行う(ステップ12)。
ここでは、現在位置検出部11により検出された車両の位置情報と地図DB13に格納されている道路情報とに基づいて、取付道路に対応するリンクの起点となっているノードを車両が通過したか否かを判断する。
【0025】
例えば、図5(a)に示す分岐点の手前のP1を車両が走行中である場合には、取付道路との分岐点の通過が検出されない。
本実施形態では、取付道路との分岐点が存在しない区間を走行中は、道路の勾配を考慮しない、現在位置検出部11により検出された車両の位置情報と地図データに基づいて行われる通常のマップマッチング処理の結果に基づいて、地図上の道路に自車位置が表示される。
従って、P1の位置を車両が走行中である場合には、現在位置検出部11により検出されるP1の位置情報に基づいて、図5(b)に示す地図上の一般道路AのP1’に自車位置(自車位置マーク)が表示される。
【0026】
取付道路との分岐点の通過が検出されない場合(ステップ12;N)、CPU10は、レジスタの上下道判定フラグのOFF状態を維持する(ステップ13)。
取付道路との分岐点の通過が検出された場合(ステップ12;Y)、CPU10は、レジスタの上下道判定フラグをON状態に切り替え、さらに抑止区間フラグをON状態に切り替える(ステップ14)。
抑止区間フラグは、当該車両が抑止区間を走行中であることを示すフラグである。抑止区間は分岐点から始まるため、ここでは分岐点の通過が検出された時点で抑止区間フラグがON状態に切り替えられる設定となっている。
【0027】
ステップ11の処理において、取付道路との分岐点の通過が検出済みと判断された場合(ステップ11;Y)、CPU10は、車両が抑止区間内を走行中か否かを判断する(ステップ15)。
ここでは、車速センサ111の検出結果に基づいて分岐点からの移動距離を測定し、この測定結果に基づいて車両が抑止区間内を走行中か否かを判断する。
車両が抑止区間内を走行中である場合(ステップ15;Y)、CPU10は、レジスタの抑止区間フラグのON状態を維持する(ステップ16)。なお、ここではレジスタの上下道判定フラグのON状態も維持する。
車両が抑止区間内を走行中でない場合(ステップ15;N)、即ち、抑止区間を外れた場合、CPU10は、抑止区間フラグをOFF状態に切り替える(ステップ17)。なお、ここではレジスタの上下道判定フラグのON状態は維持する。
【0028】
例えば、図5(a)に示すP2又はP3を車両が走行中である場合には、車両が抑止区間内を走行中であると判断される。
本実施形態では、車両が抑止区間を走行中は、分岐点を通過する前に走行していた道路(ここでは一般道路A)に自車位置が表示される。
従って、P2又はP3の位置を車両が走行中である場合には、暫定的に図5(b)に示す地図上の一般道路AのP3’に自車位置が表示される。
但し、ナビゲーション装置は、P2及びP3の双方に対応する地図上の位置を、自車位置のマッチング候補として認識している。
【0029】
続いてCPU10は、内蔵されているレジスタを読み出し、上下道判定フラグの状態に基づいて、上下道判定によるマップマッチング処理が必要か否かを判断する(ステップ18)。CPU10は、上下道判定フラグがON状態である場合、上下道判定によるマップマッチング処理が必要と判断し、上下道判定フラグがOFF状態である場合、上下道判定によるマップマッチング処理が不要と判断する。
上下道判定によるマップマッチング処理が必要である場合(ステップ18;Y)、CPU10は、抑止区間フラグの状態に基づいて、抑止区間内を走行中であるか否かを判断する(ステップ19)。CPU10は、抑止区間フラグがON状態である場合、抑止区間内を走行中であると判断し、抑止区間フラグがOFF状態である場合、抑止区間外を走行中であると判断する。
【0030】
車両が抑止区間内を走行中でない場合(ステップ19;N)、CPU10は、現在走行中の道路の実勾配の状態を判定し、この判定結果と道路情報とを照合する(ステップ20)。詳しくは、CPU10は、勾配センサ12の検出した道路の傾斜角に基づいて現在走行中の道路の実勾配の状態を判定する。そして実勾配の判定結果と、ノードNo.aa0002から分岐するリンクの勾配情報とを照合する。ここでは、実勾配の判定結果をリンクNo.A0003(一般道路A)及びリンクNo.C0001(取付道路C)の勾配情報と照合する。
CPU10は、勾配情報との照合結果に基づいて走行中の地図上の道路を特定する(ステップ21)。ここでは、リンクNo.A0003及びリンクNo.C0001のうち、実勾配の判定結果(『上』、『平』又は『下』)と勾配情報が一致するリンクに対応する道路を、走行中の地図上の道路に特定する。
続いてCPU10は、道路の特定結果と分岐点からの走行距離に基づいて地図上の道路に自車位置を表示する(ステップ22)。
【0031】
例えば、図5(a)に示す抑止区間外のP4(取付道路C)を車両が走行中である場合には、勾配センサ12の検出した道路の傾斜角に基づいて勾配『上』が判定される。
リンクNo.A0003(一般道路A)の勾配情報は『平』であり、リンクNo.C0001(取付道路C)の勾配情報は『上』である。
従って、CPU10は、リンクNo.C0001(取付道路C)を走行中の地図上の道路に特定し、この特定結果に基づいて地図上の自車位置を、図5(b)に示すP5’(一般道路A)からP4’(取付道路C)に補正する。
また、例えば、図5(a)に示す抑止区間外のP5(一般道路A)を車両が走行中である場合には、勾配センサ12に基づいて勾配『平』が判定され、リンクNo.A0003(一般道路A)が走行中の地図上の道路に特定される。この場合には、一般道路A上での自車位置の表示を継続する。
【0032】
CPU10は、上下道判定フラグ及び抑止区間フラグの状態をOFFに切り替え、即ちフラグを初期化し(ステップ23)、ステップ11の処理にリターンする。
また、ステップ18の処理において、上下道判定によるマップマッチング処理が不要であると判断された場合(ステップ18;N)、及び、ステップ19の処理において、車両が抑止区間内を走行中であると判断された場合(ステップ19;Y)、CPU11はステップ11の処理にリターンする。
【0033】
このような道路の勾配を考慮したマップマッチング処理は、通常のマップマッチング処理と並行して行われる。そして、取付道路と他の候補道路とが通常のマップマッチング処理の誤差の範囲に存在する場合、即ち、取付道路が他の候補道路と近接している場合、上述した道路の勾配を考慮したマップマッチング処理に基づく地図上の自車位置を補正するように構成されている。
例えば、高速道路と該高速道路から分岐する取付道路とが並走している場合など、車両の位置情報に基づく通常のマップマッチング処理において正確な走行道路の判定が困難な場合に、上述した道路の勾配を考慮したマップマッチング処理を行う。
【0034】
このように本実施形態によれば、抑止区間外を走行中に検出された走行道路の実勾配と道路情報とに基づいて、走行中の地図上の道路を特定することにより、より精度の高い走行中の道路の特定処理を行うことができる。これにより誤った自車位置が地図上に表示されることを抑制できる。
また、本実施形態では、車両が抑止区間から外れたことを検出した時点で、実勾配に基づく自車位置を表示する道路の特定処理を一度だけ行い、その後は再度取付道路との分岐点の通過が検出されるまで実勾配に基づく道路の特定処理は行わない。
これにより、取付道路における合流点付近の平坦な区間を走行中に、誤った自車位置が特定されることを抑制できる。
【0035】
上述した実施形態では、抑止区間の設定距離(L1)が全ての取付道路との分岐点で共通となるように設定されている。
しかしながら、取付道路の長さや勾配が出現する位置などは取付道路ごとに異なるため、取付道路との分岐点ごとに抑止区間の距離を設定するようにしてもよい。
抑止区間の設定パターンを複数設定し、取付道路との分岐点ごとに取付道路の長さに応じて設定パターンを割り付けるようにしてもよい。例えば、取付道路長が500m未満の場合には設定パターンA(100m)を割り付け、取付道路長が500m以上1000m未満の場合には、設定パターンB(200m)を割り付けるようにする。
抑止区間の設定距離を取付道路の長さに対する割合(比率)で設定するようにしてもよい。例えば、取付道路の長さの20%を抑止区間の設定距離(L1)に設定するようにしてもよい。
なお、分岐点から実際に勾配が出現する位置までの距離の実測データが存在する取付道路との分岐点には、実測データに基づく抑止区間を設定することが好ましい。
【0036】
また、上述した本実施形態では、車両が抑止区間を走行中は、分岐点を通過する前に走行していた道路上に自車位置を表示するように構成されているが、車両が抑止区間を走行中の表示形態はこれに限定されるものではない。
例えば、車両が抑止区間を走行中は、地図上の抑止区間の開始点、取付道路Cとの分岐点上に自車位置を表示し、ステップ22で道路の特定結果と分岐点からの走行距離に基づいて地図上の道路に自車位置を表示する際に、自車位置を分岐点上から移動させるようにしてもよい。
【0037】
(変形例)
上述した本実施形態では、車両が抑止区間から外れたことを検出した時点で、実勾配に基づく自車位置を表示する道路の特定処理を一度だけ行う。そして一旦道路の特定処理が行われると、再度取付道路との分岐点の通過が検出されるまで実勾配に基づく道路の特定処理は行われない。
しかしながら、抑止区間外の実勾配に基づく道路の特定方法は、これに限定されるものではない。
そこで変形例では、一度だけでなく、抑止区間外を走行期間中に継続して実勾配に基づく道路の特定処理を行う方法について説明する。
【0038】
図6は、変形例における抑止区間を説明するための図である。
実際の取付道路では、図6(a)に示すように分岐点の近傍だけでなく、合流点の近傍にも勾配が現れない区間が存在する。
そこで変形例では、実勾配を検出しない抑止区間を、さらに合流点の近傍が含まれる領域に設定する。
詳しくは、図6に示すように抑止区間として、取付道路との分岐点から半径L1未満の区間、及び、分岐点から半径L2以上取付道路長以下の区間が設定されている。
即ち、分岐点から半径L1以上L2未満の区間が上下道判定処理の判定基準となる実勾配の検出区間に設定されている。
抑止区間の判定基準となるL1、L2の値は任意に設定可能であり、この設定値は全て取付道路との分岐点で共通となっているが、上述した本実施形態と同様に、取付道路との分岐点ごとに抑止区間の距離を設定するようにしてもよい。
【0039】
そして変形例では、CPU10は、車速センサ111の検出結果に基づいて分岐点からの移動距離を測定し、この測定結果に基づいて車両が分岐点から半径L1以上L2未満の区間(抑止区間外)を走行している期間を検出する。
CPU10は、検出された抑止区間外を走行している期間において、図4のステップ20〜22の一連の処理を継続して行う。
詳しくは、抑止区間外を走行している期間中、走行中の道路の実勾配の判定処理、判定結果と道路情報との照合処理、照合結果に基づく走行中の地図上の道路の特定処理、特定結果に基づく地図上の自車位置の表示処理(補正処理)、これら一連の処理を複数回行う。
なお、後半の抑止区間を走行中は、車両の位置情報に基づく通常のマップマッチング処理ではなく、抑止区間外を走行している期間に行われた地図上の道路の特定処理結果に基づいて地図上の道路に自車位置を表示させる。
【0040】
ここでは走行中の地図上の道路が特定される都度、この特定結果に基づく地図上の自車位置の表示処理(補正処理)が行われるようになっているが、自車位置の表示処理(補正処理)を行うタイミングはこれに限定されるものではない。
例えば、抑止区間外を走行している期間中における走行中の道路の特定結果を集計し、後半の抑止区間に進入した際に、集計結果に基づいて最終的に最も確からしいと判断される地図上の道路に自車位置を表示(補正)するようにしてもよい。
変形例によれば、さらに後半の抑止区間を設けることにより、道路の特定処理の基準となる実勾配の検出区間を適切に設定することができる。
【0041】
上述した実施形態及び変形例では、抑止区間外を走行中に勾配センサ12で検出された走行道路の実勾配と道路情報との照合結果に基づいて、走行中の地図上の道路を特定するように構成されている。走行中の地図上の道路の特定精度を高めるために、さらに走行中の車両の高度情報を考慮するようにしてもよい。
詳しくは、高度センサ(高度計)を用いて走行車両の分岐点を基準とする高度を検出し、検出された車両の高度情報と勾配センサ12の検出結果に基づいて走行中の道路の勾配状態を判定する。そして勾配状態の判定結果と道路情報との照合結果に基づいて走行中の地図上の道路を特定するようにしてもよい。
なお、走行車両の分岐点を基準とする高度は、取付道路との分岐点の通過が検出された後に、勾配センサ12により検出された傾斜角θと走行距離に基づいて算出するようにしてもよい。
【0042】
上述した本実施の形態では、走行中の道路の実勾配と道路情報の有する勾配情報とに基づいて、車両が存在する道路を特定する方法を、車両が取付道路との分岐点を通過した場合を例にとり説明した。しかしながら、上述したような抑止区間を考慮した自車位置の特定方法を適用可能な箇所は、取付道路との分岐点に限定されるものではない。
図7は、本実施の形態に係る自車位置の特定方法の他の適用箇所を示した図である。
例えば、図7に示すように、勾配情報を有する一般道路Bとの分岐点を通過した場合においても、抑止区間を考慮した自車位置の特定方法を適用するようにしてもよい。
また、上述した実施形態及び変形例では、取付道路によってつながれる一般道路と高速道路とが並行している場合を例に説明したが、取付道路の配置環境はこれに限定されるものではない。例えば、交差する一般道路と高速道路とをつなぐ取付道路であっても抑止区間を考慮した自車位置の特定方法を適用することは可能である。
【図面の簡単な説明】
【0043】
【図1】本実施形態におけるナビゲーション装置の構成を示した図である。
【図2】(a)はノード情報及び道路情報を説明するための図であり、(b)は道路情報の一例を示した図である。
【図3】抑止区間を説明するための図である。
【図4】上下道判定処理の手順を示したフローチャートである。
【図5】上下道判定処理を説明するための図である。
【図6】変形例における抑止区間を説明するための図である。
【図7】本実施の形態に係る自車位置の特定方法の他の適用箇所を示した図である。
【図8】(a)は取付道路の配置例を示した図であり、(b)は取付道路の実勾配の一例を示した図であり、(c)は取付道路の他の配置例を示した図である。
【符号の説明】
【0044】
10 CPU
11 現在位置検出部
12 勾配センサ
13 地図DB
14 表示装置
15 入力装置
16 RAM
17 ROM
111 車速センサ
112 ジャイロセンサ
113 GPS受信機
171 マップマッチングプログラム
【特許請求の範囲】
【請求項1】
道路と該道路の勾配情報とを関連付けた道路情報を有する地図データを記憶する地図データ記憶手段と、
前記地図データに勾配情報が記憶された勾配道路との分岐点の通過を検出する分岐通過検出手段と、
前記分岐点の通過を検出した後、前記分岐点に基づいて定められた所定の抑止区域外を走行中に走行道路の実勾配を検出する実勾配検出手段と、
前記検出した走行道路の実勾配と前記道路情報とに基づいて、走行中の地図上の道路を特定する道路特定手段と、
前記特定された道路上に自車両の現在位置を表示する自車位置表示手段と、
を具備することを特徴とするナビゲーション装置。
【請求項2】
前記分岐点からの距離を測定する距離測定手段を備え、
前記実勾配検出手段は、前記分岐点からの距離に基づいて設定された前記所定の抑止区域外を走行中に走行道路の実勾配を検出することを特徴とする請求項1記載のナビゲーション装置。
【請求項3】
前記所定の抑止区域は、前記勾配道路における前記分岐点及び他の道路との合流点のうち少なくとも一方から所定の距離の区間を含むことを特徴とする請求項1または請求項2記載のナビゲーション装置。
【請求項4】
前記所定の抑止区域は、前記勾配道路との分岐点ごとに、該勾配道路に基づいて設定されていることを特徴とする請求項1から請求項3のいずれか1の請求項に記載のナビゲーション装置。
【請求項5】
前記勾配道路は、高低差のある道路間をつなぐ取付道路であることを特徴とする請求項1から請求項4のいずれか1の請求項に記載のナビゲーション装置。
【請求項6】
前記分岐点を基準とする走行高度を検出する高度検出手段を備え、
前記道路特定手段は、更に前記検出された走行高度に基づいて走行中の地図上の道路を特定することを特徴とする請求項1から請求項5のいずれか1の請求項に記載のナビゲーション装置。
【請求項7】
コンピュータを、
前記地図データに勾配情報が記憶された勾配道路との分岐点の通過を検出する分岐通過検出手段と、
前記分岐点の通過を検出した後、前記分岐点に基づいて定められた所定の抑止区域外を走行中に走行道路の実勾配を検出する実勾配検出手段と、
地図データ記憶手段に記憶された、道路と該道路の勾配情報とを関連付けた道路情報と、前記検出した走行道路の実勾配とに基づいて、走行中の地図上の道路を特定する道路特定手段と、
前記特定された道路上に自車両の現在位置を表示する自車位置表示手段と、
して機能させることを特徴とするナビゲーション用プログラム。
【請求項1】
道路と該道路の勾配情報とを関連付けた道路情報を有する地図データを記憶する地図データ記憶手段と、
前記地図データに勾配情報が記憶された勾配道路との分岐点の通過を検出する分岐通過検出手段と、
前記分岐点の通過を検出した後、前記分岐点に基づいて定められた所定の抑止区域外を走行中に走行道路の実勾配を検出する実勾配検出手段と、
前記検出した走行道路の実勾配と前記道路情報とに基づいて、走行中の地図上の道路を特定する道路特定手段と、
前記特定された道路上に自車両の現在位置を表示する自車位置表示手段と、
を具備することを特徴とするナビゲーション装置。
【請求項2】
前記分岐点からの距離を測定する距離測定手段を備え、
前記実勾配検出手段は、前記分岐点からの距離に基づいて設定された前記所定の抑止区域外を走行中に走行道路の実勾配を検出することを特徴とする請求項1記載のナビゲーション装置。
【請求項3】
前記所定の抑止区域は、前記勾配道路における前記分岐点及び他の道路との合流点のうち少なくとも一方から所定の距離の区間を含むことを特徴とする請求項1または請求項2記載のナビゲーション装置。
【請求項4】
前記所定の抑止区域は、前記勾配道路との分岐点ごとに、該勾配道路に基づいて設定されていることを特徴とする請求項1から請求項3のいずれか1の請求項に記載のナビゲーション装置。
【請求項5】
前記勾配道路は、高低差のある道路間をつなぐ取付道路であることを特徴とする請求項1から請求項4のいずれか1の請求項に記載のナビゲーション装置。
【請求項6】
前記分岐点を基準とする走行高度を検出する高度検出手段を備え、
前記道路特定手段は、更に前記検出された走行高度に基づいて走行中の地図上の道路を特定することを特徴とする請求項1から請求項5のいずれか1の請求項に記載のナビゲーション装置。
【請求項7】
コンピュータを、
前記地図データに勾配情報が記憶された勾配道路との分岐点の通過を検出する分岐通過検出手段と、
前記分岐点の通過を検出した後、前記分岐点に基づいて定められた所定の抑止区域外を走行中に走行道路の実勾配を検出する実勾配検出手段と、
地図データ記憶手段に記憶された、道路と該道路の勾配情報とを関連付けた道路情報と、前記検出した走行道路の実勾配とに基づいて、走行中の地図上の道路を特定する道路特定手段と、
前記特定された道路上に自車両の現在位置を表示する自車位置表示手段と、
して機能させることを特徴とするナビゲーション用プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−25178(P2009−25178A)
【公開日】平成21年2月5日(2009.2.5)
【国際特許分類】
【出願番号】特願2007−189384(P2007−189384)
【出願日】平成19年7月20日(2007.7.20)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成21年2月5日(2009.2.5)
【国際特許分類】
【出願日】平成19年7月20日(2007.7.20)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]