
ナビゲーション装置、及びナビゲーション用プログラム
【課題】いずれかの駐車場に、より確実に駐車するためにはどの領域が良いのかをユーザ認識できるようにする。
【解決手段】ナビゲーション装置は、目的地周辺の複数駐車場の駐車確率に基づいて目的地周囲を複数の領域に分け、ユーザによって指定された領域内の複数の駐車場を探索する。すなわち、目的地周辺の所定領域を複数の領域に分割し、各領域内に存在する駐車場毎の駐車確率から、各領域毎に、領域全体の駐車確率(合計駐車確率)を算出してユーザに案内する。合計駐車確率は、全ての駐車場を経由した場合にいずれかの駐車場に駐車できる確率P2である。ユーザは、案内された各領域毎の合計駐車確率を参考に、いずれの領域内で駐車場を探したらよいかを決定することができる。
【解決手段】ナビゲーション装置は、目的地周辺の複数駐車場の駐車確率に基づいて目的地周囲を複数の領域に分け、ユーザによって指定された領域内の複数の駐車場を探索する。すなわち、目的地周辺の所定領域を複数の領域に分割し、各領域内に存在する駐車場毎の駐車確率から、各領域毎に、領域全体の駐車確率(合計駐車確率)を算出してユーザに案内する。合計駐車確率は、全ての駐車場を経由した場合にいずれかの駐車場に駐車できる確率P2である。ユーザは、案内された各領域毎の合計駐車確率を参考に、いずれの領域内で駐車場を探したらよいかを決定することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はナビゲーション装置、及びナビゲーション用プログラムに係り、例えば、目的地周辺に存在する駐車場を案内する走行経路の探索に関する。
【背景技術】
【0002】
入力された目的地までの走行経路を探索や通信により取得して案内するナビゲーション装置が広く普及している。このナビゲーション装置では、目的地として駐車場を設定することで駐車場を案内する場合のほか、目的地周辺の駐車場を検索して駐車場までの走行経路を取得して案内するナビゲーション装置も提案されている。
例えば、特許文献1では、車両位置周辺に存在するオンストリートパーキング(路上駐車場)の位置と空車確率を現在位置とともに地図情報に表示する技術について記載されている。
しかし、表示される空車確率は各オンストリートパーキング個別の確率であり、いずれかの駐車場に駐車できる可能性を領域全体として知ることはできない。
このため、ユーザは表示されたいずれかのオンストリートパーキングを選択して移動するが、実際にそのオンストリートパーキングまで走行した場合に駐車できない可能性があり、この場合には、各オンストリートパーキングの空車確率を再度確認し、次に移動すべきオンストリートパーキングを選択する必要があり、ユーザにとってはわずらわしい。また、複数のオンストリートパーキングを移動する際、同じ道路を重複して走行する可能性があり、効率的な駐車を行えなくなる可能性がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−162529号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、いずれかの駐車場に、容易にかつ効率的に駐車できるようにすることを目的とする。
【課題を解決するための手段】
【0005】
(1)請求項1記載の発明では、目的地を取得する目的地取得手段と、前記取得した目的地を含む所定領域内に存在する駐車場を検索する駐車場検索手段と、前記検索した駐車場毎に駐車可能な駐車確率を取得する駐車確率取得手段と、前記所定領域を目的地からの距離に基づいて複数の領域に分割する分割手段と、前記分割した複数の領域について、各領域内に存在する駐車場の駐車確率を取得し、各領域毎に、領域全体の駐車確率を案内する案内手段と、を具備することを特徴とするナビゲーション装置を提供する。
(2)請求項2記載の発明では、前記分割手段は、前記所定領域と前記分割した複数の領域の中心は、車両位置に基づいて複数の領域に分割する、ことを特徴とする請求項1に記載のナビゲーション装置を提供する。
(3)請求項3記載の発明では、各領域内に存在する駐車場を経由する走行経路を探索する経路探索手段を備え、前記経路探索手段は、選択された領域内に存在する駐車場のうち、所定数の駐車場を前記目的地に近い順に経由する走行経路を探索する、ことを特徴とする請求項1に記載のナビゲーション装置を提供する。
(4)請求項4記載の発明では、前記探索した走行経路に従い、前記走行経路と経由する駐車場を案内する経路案内手段と、を具備することを特徴とする請求項3に記載のナビゲーション装置を提供する。
(5)請求項5記載の発明では、前記案内手段は、車両が前記走行経路上のいずれかの駐車場に到着した場合、到着した駐車場を除いた経由する駐車場全体の駐車確率を案内することを特徴とする請求項4に記載のナビゲーション装置を提供する。
(6)請求項6記載の発明では、目的地を取得する目的地取得機能と、前記取得した目的地を含む所定領域内に存在する駐車場を検索する駐車場検索機能と、前記検索した駐車場毎に駐車可能な駐車確率を取得する駐車確率取得機能と、前記所定領域を目的地からの距離に基づいて複数の領域に分割する分割機能と、前記分割した複数の領域について、各領域内に存在する駐車場の駐車確率を取得し、各領域毎に、領域全体の駐車確率を案内する案内機能と、をコンピュータに実現させることを特徴とするナビゲーション用プログラムを提供する。
【発明の効果】
【0006】
本発明では、取得した目的地を含む所定領域を目的地からの距離に基づいて複数の領域に分割し、各領域内に存在する駐車場の駐車確率を取得し、各領域毎に、領域全体の駐車確率を案内するので、ユーザは表示された領域全体の駐車確率に基づいてより適切な領域を認識することができる。
【図面の簡単な説明】
【0007】
【図1】本実施形態のナビゲーション装置のシステム構成図である。
【図2】合計駐車確率案内処理の内容を表したフローチャートである。
【図3】駐車領域とその合計駐車確率を案内する案内画面の表示例である。
【図4】経路探索処理の内容を表したフローチャートである。
【図5】経路案内処理の内容を表したフローチャートである。
【図6】駐車領域とその合計駐車確率を案内する他の案内画面の表示例である。
【発明を実施するための形態】
【0008】
以下、本発明のナビゲーション装置、及びナビゲーションプログラムにおける好適な実施の形態について、図1から図6を参照して詳細に説明する。
(1)実施形態の概要
本実施形態のナビゲーション装置は、目的地を含む所定領域を複数の領域に分割し、各領域内に存在する駐車場毎の駐車確率から、各領域毎に、領域全体の駐車確率(合計駐車確率という)を算出してユーザに案内する。
合計駐車確率は、各駐車場の駐車確率を加算した合計値P1でも良く、また、全ての駐車場を経由した場合にいずれかの駐車場に駐車できる確率P2や、全駐車場に対する駐車確率の平均値P3でもよい。
ユーザは、案内された各領域毎の合計駐車確率を参考に、いずれの領域内で駐車場を探したらよいかを決定することができる。
【0009】
また、いずれか1の領域を選択すると、選択された領域内に存在する複数の駐車場(全駐車場でも一部でもよい)を経由して目的地に到達する経路を探索し、各経路及び経由する駐車場を案内する。
経由する駐車場に到着すると、その駐車場を含めて到着済みの駐車場を除いた残りの経由する駐車場(未到着の経由する駐車場)を対象とする合計駐車確率を案内する。
このように経由する駐車場に到着する毎に未到着の経由する駐車場の合計駐車確率を表示することで、ユーザは、到着した駐車場に止めるか、他の駐車場に止めるかを判断することができる。
この場合、合計駐車確率だけでなく、到着した駐車場と他の駐車場の位置、及び目的地を地図上に表示することでユーザは到着した駐車場に駐車するか他の駐車場に駐車するかを目的地との位置関係も考慮して決定することができる。
さらにユーザの判断情報として、到着した駐車場の駐車確率も表示するようにしてもよい。
未到着の経由する駐車場の合計駐車確率については、いずれかの駐車場に到着する毎に計算しても良く、複数の駐車場を経由して目的地に到達する経路が探索された時点で算出しておいてもよい。
【0010】
なお、本実施形態では、M個の駐車場を順次経由していき、最初の空き駐車場に駐車することを前提としている。
【0011】
(2)実施形態の詳細
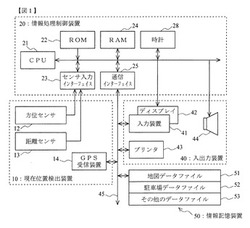
図1は本実施形態が適用されるナビゲーション装置のシステム構成図である。
このナビゲーション装置は、車両に搭載され、この図1に示すように、現在位置検出装置10、情報処理制御装置20、入出力装置40及び情報記憶装置50とを備えている。
【0012】
現在位置検出装置10は、以下のように構成されている。
方位センサ12は、基準角度(絶対方位)に対して、相対的に変化した角度を検出する手段であり、本実施形態では、角速度を利用して角度の変化を検出するジャイロセンサを使用している。なお、ハンドルの回転部に取り付けた光学的な回転センサや回転型の抵抗ボリューム或いは車輪部に取り付ける角度センサでもよい。また、方位センサ12として、例えば、磁石に基づいてN方向の検出から、車両がいずれの方向に位置するかを検出する地磁気センサであり、絶対方位を検出する手段であってもよい。
【0013】
距離センサ13は、車両の移動距離を計測できる手段であり、例えば、車輪の回転を検出して計数するものや、加速度を検出して2回積分するものを使用する。
GPS(グローバル・ポジショニング・システム)受信装置14は、人工衛星からの信号を受信する装置であり、信号の発信時刻、受信装置の位置情報、受信装置の移動速度、受信装置の進行方向など様々な情報を得ることができる。
【0014】
情報処理制御装置20は、現在位置検出装置10、入出力装置40から入力される情報及び情報記憶装置50に格納された情報に基づいて演算及び制御を行うとともに、演算結果をディスプレイ42、プリンタ43またはスピーカ44等の出力手段に出力するように制御する手段である。
【0015】
この情報処理制御装置20は、以下のように構成されている。
中央処理装置(CPU)21は、ナビゲーション装置全体の総括的な演算及び制御を行う。
ROM22は、目的地までの経路の探索、表示案内や音声案内等のナビゲーションに関する通常の目的地設定プログラムや経路探索処理プログラムや経路案内処理プログラムの他、本実施形態における合計駐車確率案内処理プログラムや経路探索処理プログラムや経路案内処理プログラム、等の各種プログラムを格納している。なお、ROM22を第1ROMと第2ROMの2つに分け、第2ROMに音声案内に関するナビゲーションプログラムを格納し、他のプログラムを第1ROMに格納するようにしてもよい。
センサ入力インターフェイス23は、現在位置検出装置10からの情報を受け取る手段である。
【0016】
RAM24は、入力装置41により入力された目的地の情報、通過地点の情報等の利用者が入力した情報を記憶すると共に、利用者の入力情報に基づいてCPU21により演算された結果や、経路探索された結果、または情報記憶装置50から読み込まれた地図情報を格納するための記憶手段である。
【0017】
通信インターフェイス25は、伝送路45を介して各種情報の入出力するための手段である。具体的には、伝送路45を介して、GPS受信装置14、入力装置41、プリンタ43、情報記憶装置50が接続される。
時計28は、例えば、水晶振動子などを用いて構成されており、時刻を刻んだり、発振によってナビゲーション装置の各部の動作タイミングを提供したりする。
その他、CPU21で処理されたベクトル情報を画像情報に処理するための画像処理専用の画像プロセッサ、画像プロセッサで処理された画像情報を格納する画像メモリ、情報記憶装置50から読み込まれた音声情報を処理しスピーカ44に出力する音声処理専用の音声プロセッサを配設するようにしてもよい。
【0018】
入出力装置40は、利用者により目的地、通過地点、探索条件等のデータを入力する入力装置41、画像を表示するディスプレイ42、情報を印刷するプリンタ43、音声を出力するスピーカ44より構成される。
入力装置41は、例えば、タッチパネル、タッチスイッチ、ジョイスティック、キースイッチ等で構成される。
ディスプレイ42には、現在地周辺の地図や、目的地までの走行経路が表示される。
なお、入出力装置40は、プリンタ43を有しない構成としてもよい。
【0019】
情報記憶装置50は、伝送路45を介して情報処理制御装置20に接続される。
情報記憶装置50は、地図データファイル51、駐車場データファイル52、その他のデータファイル53を格納している。
この情報記憶装置50は、一般的には、光学的記憶媒体であるDVD−ROM、CD−ROMや磁気的記憶媒体であるハードディスクなどで構成されるが、光磁気ディスク、各種半導体メモリなどの各種情報記憶媒体で構成してもよい。
なお、書き換えが必要な情報については、書き換え可能なハードディスク、フラッシュメモリなどで構成し、その他の固定的な情報についてはCD−ROM、DVD−ROMなどのROMを使用するようにしてもよい。
【0020】
地図データファイル51には、ナビゲーションにおける地図表示、経路探索、経路案内に必要な各種データとして、地図データ、道路データ、目的地データ、その他のデータが記憶されている。
地図データとしては、全国道路地図、各地域の道路地図または住宅地図等が記憶されている。道路地図は、主要幹線道路、高速道路、細街路等の各道路と地上目標物(施設等)から構成される。住宅地図は、地上建造物等の外形を表す図形及び、道路名称等が表示される市街図である。細街路とは、例えば、国道、県道以下の道幅が所定値以下の比較的狭い道路である。
地図データは、車両現在位置やユーザに指定された地点を含む、所定縮尺による一定範囲の地図がディスプレイ42に表示される。この地図上には、車両の現在位置や指定された地点が表示される。
【0021】
道路データは、各道路の位置と種類及び車線数及び各道路間の接続関係等の道路に関するデータで、ノードデータとリンクデータで構成される。この道路データは、経路探索やマップマッチングに使用されると共に、探索した走行経路を地図データ上に重ねて表示する場合にも使用される。
ノードデータは、地図上において経路探索に利用される各ノードの地理座標データ等を表したデータである。
例えば、交差点などの道路の接続点はノードにより表され、接続点の間の道路(即ち道路の内分岐しない領域)はリンクによって表される。このように、ノードデータ経路の接続関係を表した経路データとして機能している。
なお、進入禁止や一方通行など、交通規制により走行が制限されるものに関しては、これを表す属性が、各リンクに付与されているが、これらの属性については、交差点ノードに付与するようにしてもよい。
ノードデータは、各交差点に対して常に設定される交差点ノードと共に、各交差点間の特徴的な点(例えば、カーブの開始、中間、終了の各地点や、高度が変化する地点など)に補助的に設定される場合がある補助ノードが存在する。交差点ノードには、交差点の地理的位置座標や名称等の交差点に関する情報が含まれる。
【0022】
目的地データは、主要観光地や建物、電話帳に記載されている企業・事業所等の目的地になる可能性の高い場所や施設等の位置と名称等のデータである。
目的地データには、施設としての駐車場も含まれ、いずれかの目的地(駐車場を除く)がユーザにより設定されると、本実施形態の合計駐車確率案内処理の対象として、設定された目的地周辺の駐車場が検索される。
【0023】
駐車場データファイル52には、目的地データに含まれる各駐車場の満空情報が格納されている。表示における満空情報としては、各駐車場に駐車できる駐車確率が、曜日及び時間帯毎に保存されている。この満空情報は、リアルタイムに取得するものでも、また統計情報等による場合でも、その両者であってもよい。
統計による満空情報は、過去の駐車場の空き情報を曜日毎及び時間帯毎に累積記憶し、累積された空き情報の統計結果に基づいて曜日毎及び時間帯毎の満空情報が算出される。この満空情報は、各駐車場に設置された情報処理装置や情報センタが算出する。
なお、更に季節毎や月毎を加えたより詳細な分類で駐車確率を保存するようにしてもよい。
また、特定の行事日(例えば、元旦や祭日等)のように通常とは駐車量が異なる場合には、かかる特定の行事日における駐車確率を保存するようにしてもよい。この場合にも時間帯毎に駐車確率を保存するようにしてもよい。
【0024】
本実施形態における満空情報は、各駐車場についての満空情報を収集した特定のデータを、情報センタからの通信、またCD等の記憶媒体からの読み込み、その他各種方法により入手して駐車場データファイル52に保存する。
満空情報の収集については、所定の情報センタから逐次取得して更新するようにしても、個別に各駐車場から直接入手するようにしてもよい。
【0025】
その他のデータファイル53には、例えば、各種施設や観光地、または主要な交差点等の視覚的表示が要求される場所を写した写真の画像データや、設定した走行経路を音声により案内する場合の音声データ等が記憶されている。
【0026】
次に、以上のように構成された実施形態の動作について説明する。
なお、説明する合計駐車確率案内は、目的地が設定された場合に、その周辺に存在する複数の駐車場を、領域毎に分割し、各領域の合計駐車確率を算出して案内するものである。
この場合、地図画面等に本実施形態の駐車場経路探索を指示する駐車場キーを配置し、この駐車場キーが選択された場合に、以下説明する合計駐車確率案内を実行する。
【0027】
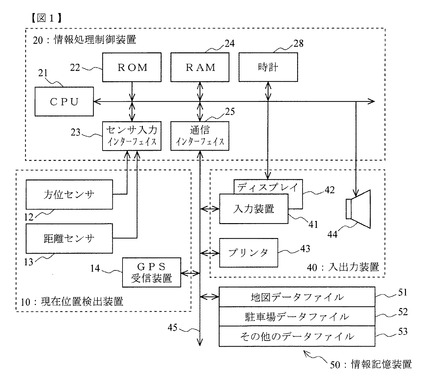
図2は、合計駐車確率案内処理の内容を表したフローチャートである。
まず情報処理制御装置20は、目的地を取得する(ステップ10)。この実施形態では、車両に搭載されたナビゲーション装置を前提としているため、目的地の取得はナビゲーション機能における目的地設定処理においてユーザが設定した目的地を取得することになる。
【0028】
次に情報処理制御装置20は、取得した目的地を含む所定領域、たとえば、目的地から所定距離Rmを半径とする領域内の駐車場を、地図データファイル51の目的地データに基づいて検索する。そして、駐車場が存在するか否かについて判断し(ステップ11)、存在しない場合には(ステップ11;N)メインルーチンにリターンする。
本実施形態において所定距離Rmは500mに設定されている。この所定距離は最も離れた地点に存在する駐車場から目的地まで徒歩で移動可能な距離として設定されている。なお、より長い距離、例えば、R=1km、2kmとしてもよく、ユーザの好みにより変更することができるようにしてもよい。
【0029】
一方、駐車場が存在する場合(ステップ11;Y)、情報処理制御装置20は、目的地の周囲Rmの領域を、半径rm毎の領域に分割する(ステップ12)。領域なお、半径Rをn(n=2又は3等)等分した領域に分割するようにしてもよい。
【0030】
次に情報処理制御装置20は、半径Rmの所定領域内に存在する駐車場毎の駐車確率を駐車場データファイル52の満空情報から取得する(ステップ13)。
【0031】
次に情報処理制御装置20は、分割した領域内に存在する駐車場の合計駐車確率(領域全体の駐車確率)を各領域毎に算出する(ステップ14)。
合計駐車確率は、各駐車場の駐車確率を加算した合計値P1でも良く、また、全ての駐車場を経由した場合にいずれかの駐車場に駐車できる確率P2や、全駐車場に対する駐車確率の平均値P3でもよいが、本実施形態では確率P2を採用している。
【0032】
いずれかの駐車場に駐車できる確率P2は、各駐車場に駐車できない確率から次のようにして求める。
ある駐車場mの駐車確率がpm(≦1)である場合、この駐車場mに駐車できない確率qmはqm=(1−pm)となる。
M個の駐車場のいずれにも駐車することができない確率Qは、Q=q1×q2×…×qmから求まる。
そして、M個の駐車場のいずれかに駐車できる確率P2は、P2=(1−Q)となる。
【0033】
情報処理制御装置20は、算出した領域毎の合計駐車確率P2を案内して(ステップ15)メインルーチンにリターンする。
領域毎の合計駐車確率P2はディスプレイ42の案内画面に表示される。
なお、情報処理制御装置20は、算出した領域毎の合計駐車確率については、案内画面表示のため、及び、後述の経路探索処理のためにRAM24に保存しておく。
【0034】
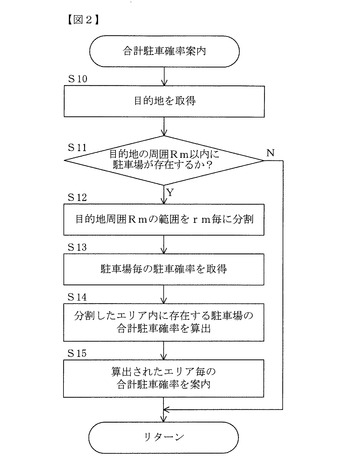
図3は、駐車領域とその合計駐車確率を案内する案内画面の表示例を示したものである。
この図3に示されるように情報処理制御装置20は、案内画面に目的地Gを中心にして半径Rmの所定領域を、目的地Gからの距離に応じてrm毎に分割した領域1と領域2を区別可能に表示する。図3(a)の例では、領域の境界線を表示することで区別している。
そして、情報処理制御装置20は、各領域に対して算出した合計駐車確率(領域全体の駐車確率)を各領域毎に表示する。図3(a)の例では、領域1の合計駐車確率として20%が、領域2の合計駐車確率として50%が表示されている。このように、算出した合計駐車確率0.2と0.5はユーザの認識を容易にするために百分率表示にしてある。
【0035】
一般にある施設周辺に存在する駐車場は、その施設に近いほど駐車してからの移動距離が短いことから個別の駐車確率は低くなる。逆に施設から離れるほど個別駐車確率は高くなるが駐車後の移動距離が長くなる。
本実施形態では、目的地を中心とした距離に基づいて領域を分割しているので、目的地に近い領域1は合計駐車確率が20%と低く、目的地から離れた領域2は合計駐車確率が50%と高くなっている。
ユーザは、各領域合計駐車確率と目的地Gからの距離関係を認識したうえで、自分が駐車したい領域を選択することができる。
【0036】
また図3(a)に示すように、各領域における目的地Gを中心とした位置関係に従って各駐車場Pが表示されている。
これによりユーザは各領域の駐車場が、領域内にどのように分散しているのかも併せて認識することができる。例えば、複数の駐車場が領域の一カ所に集中しているのか、全体に分散しているのか、目的地付近に多いのか少ないのか等を併せて認識することができる。
【0037】
さらに、ユーザが領域を選択する際の有用な情報として、駐車場の名称や駐車料金を表示し、又は/及び、個別の駐車確率を表示するようにしてもよい。
さらに、案内画面の表示は地図画面上に、目的地G、各領域1、2、各駐車場、及び各領域の合計駐車確率を表示するようにしてもよい。
【0038】
図3(b)は、合計駐車確率を表示する場合の他の例を表したものである。
図3(a)では合計駐車確率を百分率で20%、50%等と表示したが、図3(b)の例では、合計駐車確率を各領域全体の色で区別表示している。
例えば、合計駐車確率が20%以下の場合に赤色、20%を超え60%以下を黄色を、60%を超える場合を青で表す。
【0039】
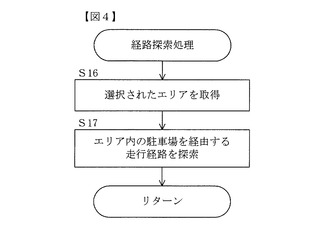
次に、所定領域を複数に分割した領域に基づく経路探索処理について、図4のフローチャートを参照して説明する。
情報処理制御装置20は、ユーザによって選択された領域を取得する(ステップ16)。
本実施形態においてユーザによる領域の選択は、合計駐車確率案内処理で合計駐車確率を表示した案内画面(図3)において、ユーザが選択した領域を取得する。
なお、案内画面においてユーザが領域を選択する場合には、その領域1、2の表示領域をタッチし、又は領域番号を併せて表示しテンキーなどから領域番号に対応する数字を入力する。情報処理制御装置20は、タッチされた位置がどの領域かを検出することで、又は入力された数字を取得することで選択された領域を認識する。
なお、案内画面を見て領域を選択するのではなく、より目的地に近い領域、合計駐車確率が高い領域等の領域選択基準をユーザに提示し、ユーザが領域選択基準を予め選択しておくことで領域を選択するようにしてもよい。この場合、情報処理制御装置20は、ユーザにより予め選択された選択基準に従い、分割した各領域のなかから1の領域を取得する。
【0040】
次に情報処理制御装置20は、取得した領域内の駐車場を経由する走行経路を探索し、探索した走行経路をRAM24に保存して(ステップ17)、メインルーチンにリターンする。
この走行経路の探索は、各駐車場を経由して設定された目的地Gまでの走行経路を探索しても、いずれかの駐車場まで他の駐車場を経由する走行経路を探索するようにしてもよく、またユーザがいずれかを選択するようにしてもよい。
【0041】
領域内に存在する各駐車場を経由する順序については、目的地Gに近い順、すなわち、目的地Gからの距離(直線距離でも、走行経路による距離でもよい)が小さい順に設定する。
なお、本実施形態では領域内に存在する全ての駐車場を経由対象としているが、個別の駐車確率が所定値以上である駐車場だけを経由対象とし、又は、駐車確率が高い上位所定数の駐車場を経由対象としてもよい。この場合においても、経由する順番は目的地Gに近い順番とする。
【0042】
以上の経路探索処理により走行経路が探索され、車両の走行が開始されると、情報処理制御装置20は、探索した走行経路に基づく経路案内処理を実行する。
なお、情報処理制御装置20は、通常の経路探索と同様に、複数の走行経路を探索してユーザに提示し、選択された走行経路を案内対象とするようにしてもよい。
【0043】
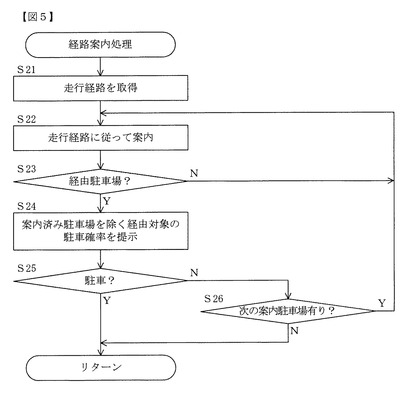
図5は、選択された領域内の駐車場を経由する経路案内処理を表したフローチャートである。
情報処理制御装置20は、車両が走行を開始すると、走行経路をRAM24から取得し(ステップ21)、取得した走行経路に従って案内を行う(ステップ22)。
この走行経路案内は、従来から行われている走行経路の案内と同様であり、例えば、次のようにして行われる。
すなわち、情報処理制御装置20は、現在位置検出装置10で現在位置を検出し、情報記憶装置50の地図データファイル51から現在位置周辺の地図情報を読み込みディスプレイ42に表示する。また、経由する各駐車場と案内対象の走行経路を地図表示に合わせてディスプレイ42に表示する。
そして、情報処理制御装置20は、現在位置検出装置10によって検出された現在位置を追跡することにより、経路案内を行う。
経路案内は、探索した走行経路に対応する道路データと現在位置検出装置10で検出される現在位置とのマップマッチングにより地図上の車両位置を特定し、車両現在位置周辺の地図をディスプレイ42に表示し、探索した走行経路を地図上に表示すると共に、車両の現在位置を示す現在位置マーク(例えば、円内に進行方向を向いた△や矢印等で表示)を地図上に表示する。
また、探索した走行経路と現在位置との関係から、案内の必要性、すなわち直進が所定距離以上続く場合、所定の進路変更地点等の走行経路の案内、及び方面案内が必要か否か等について判断し、必要である場合にはディスプレイ42の表示及び音声による案内を実行する。
【0044】
情報処理制御装置20は、車両が経由する駐車場に到着したか否かを判断し(ステップ23)、駐車場でなければ(ステップ23;N)、ステップ22に戻って経路案内を継続する。
一方、経由する駐車場に到着した場合(ステップ23;Y)、情報処理制御装置20は、経由する駐車場のうち案内済みの駐車場を除いた残りの駐車場(以下、残駐車場という)に関する駐車確率をユーザに案内する(ステップ24)。
ここで案内する残駐車場に関する駐車確率は、残駐車場に対する合計駐車確率(P1、P2、又はP3)、又は/及び残駐車場の個別の駐車確率である。いずれの場合においても残駐車場に関する駐車確率は、地図、走行経路、目的地、経由駐車場(案内済みの駐車場を含めてもよい)、と共にディスプレイ42に表示する。
【0045】
残駐車場に関する駐車確率を表示した後、情報処理制御装置20は、案内(経由)した駐車場に駐車したか否かを判断する(ステップ25)。
ここで、案内した駐車場にユーザが駐車しない場合としては、満車のために駐車できない場合、及び、駐車可能であるが残駐車場に関する駐車確率の表示を確認することで駐車しなかった場合がある。
案内した駐車場を通過した場合や駐車場の中に入ったとしてもそのまま駐車場外に出てきた場合には駐車しない場合と判断する。
【0046】
案内した駐車場に駐車した場合には(ステップ25;Y)、メインルーチンにリターンする。
ここで、駐車場内でイグニッションオフや案内終了の入力がされた場合には駐車可能であったと判断する。
【0047】
案内した駐車場に駐車せずに走行を継続した場合(ステップ25;N)、情報処理制御装置20は、次の案内対象となっている経由駐車場が存在するか否かを確認する(ステップ26)。
次の案内対象となっている経由駐車場が存在する場合には(ステップ26;Y)、情報処理制御装置20は、ステップ22に戻り、次の駐車場までの経路案内を継続する。
【0048】
一方、次の案内駐車場が無い場合、すなわち、案内した駐車場が経由する最後の駐車場である場合(ステップ26;N)、情報処理制御装置20は、メインルーチンにリターンする。
【0049】
なお、次の案内駐車場が無い場合(ステップ26;N)、情報処理制御装置20は、他の領域についての経路探索及び案内を行うか否かを問い合わせ、肯定的入力である場合に、未案内の他領域についての経路探索及び経路案内を行うようにしてもよい。
他の領域が複数存在する場合には、問い合わせの際に他の複数領域毎に再度合計駐車確率を案内して次の領域をユーザに選択してもらうようにする。また、ユーザが予め選択基準を選択している場合には、当該選択基準に従った次の領域を自動選択するようにしてもよい。
【0050】
以上説明したように本実施形態によれば、次の各効果を得ることができる。
(1)目的地周辺を複数の領域に分割し、領域毎の合計駐車確率が案内されるので、ユーザは、案内された各領域毎の合計駐車確率を参考に、いずれの領域内で駐車場を探したらよいかを決定することができる。
(2)経由駐車場に着く毎に残駐車場に関する駐車確率が案内されるので、ユーザは、到着した駐車場に駐車するか、他の駐車場に止めるかを判断することができる。
【0051】
以上、本発明のナビゲーション装置及びナビゲーションプログラムにおける1実施形態について説明したが、本発明は説明した実施形態に限定されるものではなく、各請求項に記載した範囲において各種の変形を行うことが可能である。
例えば、説明した実施形態では車載のナビゲーション装置について説明したが、情報センタの情報処理サーバ等に説明した各ナビゲーション装置の機能を持たせるようにしてもよい。
この場合の情報センタでは、車載ナビゲーション装置から通信により目的地を取得し、取得した目的地周辺の駐車場を本実施形態で説明した合計駐車確率案内処理(図2)を行う。
但し情報処理制御装置20は、算出した領域毎の合計駐車確率の案内(ステップ15)として、図3に示す案内画面を車載ナビゲーション装置に送信することで行う。この場合も、図3で説明した案内画面に関する各種変形と同様の情報を車載ナビゲーション装置に送るようにしてもよい。
【0052】
また、情報センタが説明した実施形態のナビゲーション機能を備える場合、車載ナビゲーション装置のユーザから領域の選択情報を取得して経路探索処理(図4)を実行し、探索した走行経路を車載ナビゲーション装置に送信する。
【0053】
なお、経路案内処理(図5)は、車載ナビゲーション装置において実行することになるが、情報センタが、各駐車場に到着した場合に表示する残駐車場に関する駐車確率を、各駐車場毎に予め算出しておき、走行経路を探索して車載ナビゲーション装置に送信する際に併せて送信する。
但し、各経由駐車場に到着する毎に車載ナビゲーション装置が、到着した駐車場を情報センタに送信し、該送信を受けて情報センタが残駐車場に関する駐車確率を車載ナビゲーション装置に送信するようにしてもよい。
【0054】
また、経由途中の駐車場で駐車した場合、その駐車場から目的地までの歩行による移動経路を画面表示するようにしてもよい。
この場合、駐車時に目的地までの歩行移動経路を探索して表示するが、予め経路探索処理(図4)において、経由する各駐車場から目的地までの歩行移動経路のそれぞれを探索しておき、駐車時にその駐車場からの歩行移動経路を表示するようにしてもよい。
駐車するか否かは、例えば、音声や画面表示による問い合わせを行い、その回答(音声認識、肯定キーの選択)により判断する。
【0055】
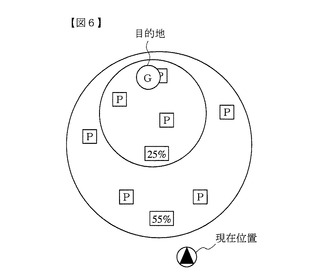
また、説明した実施形態では、所定領域、分割された領域の中心を目的地としたが、車両位置に基づいて中心位置を変更してもよい。
例えば、図3では半径rm、Rmの各中心点を目的地としたが、図6に示すように、各中心点を車両の現在位置側に移動させた領域としてもよい。すなわち、目的地Gと車両位置を結ぶ直線上で中心を目的地Gから車両側に移動する。この移動量は各半径以下とする。
このようにすることで、目的地よりも手前側で駐車しやすくなる。
【0056】
また説明した実施形態では、距離rm毎に領域を分割する場合について説明したが、駐車場の数により領域を分割するようにしてもよい。
例えば、目的地Gからの直線距離(又は走行経路による距離)が近い順に駐車場を並べ、上位s箇所(例えば、5カ所、10カ所等)毎に領域を分割する。
また、半径Rmの所定領域内に存在する全駐車場数をUとし、分割領域数をvとした場合に、目的地Gから近い順にU/v箇所の駐車場を含む領域に分割するようにしてもよい。
【符号の説明】
【0057】
10 現在位置検出装置
20 情報処理制御装置
21 CPU
40 入出力装置
50 情報記憶装置
51 地図データファイル
52 駐車場データファイル
【技術分野】
【0001】
本発明はナビゲーション装置、及びナビゲーション用プログラムに係り、例えば、目的地周辺に存在する駐車場を案内する走行経路の探索に関する。
【背景技術】
【0002】
入力された目的地までの走行経路を探索や通信により取得して案内するナビゲーション装置が広く普及している。このナビゲーション装置では、目的地として駐車場を設定することで駐車場を案内する場合のほか、目的地周辺の駐車場を検索して駐車場までの走行経路を取得して案内するナビゲーション装置も提案されている。
例えば、特許文献1では、車両位置周辺に存在するオンストリートパーキング(路上駐車場)の位置と空車確率を現在位置とともに地図情報に表示する技術について記載されている。
しかし、表示される空車確率は各オンストリートパーキング個別の確率であり、いずれかの駐車場に駐車できる可能性を領域全体として知ることはできない。
このため、ユーザは表示されたいずれかのオンストリートパーキングを選択して移動するが、実際にそのオンストリートパーキングまで走行した場合に駐車できない可能性があり、この場合には、各オンストリートパーキングの空車確率を再度確認し、次に移動すべきオンストリートパーキングを選択する必要があり、ユーザにとってはわずらわしい。また、複数のオンストリートパーキングを移動する際、同じ道路を重複して走行する可能性があり、効率的な駐車を行えなくなる可能性がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−162529号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、いずれかの駐車場に、容易にかつ効率的に駐車できるようにすることを目的とする。
【課題を解決するための手段】
【0005】
(1)請求項1記載の発明では、目的地を取得する目的地取得手段と、前記取得した目的地を含む所定領域内に存在する駐車場を検索する駐車場検索手段と、前記検索した駐車場毎に駐車可能な駐車確率を取得する駐車確率取得手段と、前記所定領域を目的地からの距離に基づいて複数の領域に分割する分割手段と、前記分割した複数の領域について、各領域内に存在する駐車場の駐車確率を取得し、各領域毎に、領域全体の駐車確率を案内する案内手段と、を具備することを特徴とするナビゲーション装置を提供する。
(2)請求項2記載の発明では、前記分割手段は、前記所定領域と前記分割した複数の領域の中心は、車両位置に基づいて複数の領域に分割する、ことを特徴とする請求項1に記載のナビゲーション装置を提供する。
(3)請求項3記載の発明では、各領域内に存在する駐車場を経由する走行経路を探索する経路探索手段を備え、前記経路探索手段は、選択された領域内に存在する駐車場のうち、所定数の駐車場を前記目的地に近い順に経由する走行経路を探索する、ことを特徴とする請求項1に記載のナビゲーション装置を提供する。
(4)請求項4記載の発明では、前記探索した走行経路に従い、前記走行経路と経由する駐車場を案内する経路案内手段と、を具備することを特徴とする請求項3に記載のナビゲーション装置を提供する。
(5)請求項5記載の発明では、前記案内手段は、車両が前記走行経路上のいずれかの駐車場に到着した場合、到着した駐車場を除いた経由する駐車場全体の駐車確率を案内することを特徴とする請求項4に記載のナビゲーション装置を提供する。
(6)請求項6記載の発明では、目的地を取得する目的地取得機能と、前記取得した目的地を含む所定領域内に存在する駐車場を検索する駐車場検索機能と、前記検索した駐車場毎に駐車可能な駐車確率を取得する駐車確率取得機能と、前記所定領域を目的地からの距離に基づいて複数の領域に分割する分割機能と、前記分割した複数の領域について、各領域内に存在する駐車場の駐車確率を取得し、各領域毎に、領域全体の駐車確率を案内する案内機能と、をコンピュータに実現させることを特徴とするナビゲーション用プログラムを提供する。
【発明の効果】
【0006】
本発明では、取得した目的地を含む所定領域を目的地からの距離に基づいて複数の領域に分割し、各領域内に存在する駐車場の駐車確率を取得し、各領域毎に、領域全体の駐車確率を案内するので、ユーザは表示された領域全体の駐車確率に基づいてより適切な領域を認識することができる。
【図面の簡単な説明】
【0007】
【図1】本実施形態のナビゲーション装置のシステム構成図である。
【図2】合計駐車確率案内処理の内容を表したフローチャートである。
【図3】駐車領域とその合計駐車確率を案内する案内画面の表示例である。
【図4】経路探索処理の内容を表したフローチャートである。
【図5】経路案内処理の内容を表したフローチャートである。
【図6】駐車領域とその合計駐車確率を案内する他の案内画面の表示例である。
【発明を実施するための形態】
【0008】
以下、本発明のナビゲーション装置、及びナビゲーションプログラムにおける好適な実施の形態について、図1から図6を参照して詳細に説明する。
(1)実施形態の概要
本実施形態のナビゲーション装置は、目的地を含む所定領域を複数の領域に分割し、各領域内に存在する駐車場毎の駐車確率から、各領域毎に、領域全体の駐車確率(合計駐車確率という)を算出してユーザに案内する。
合計駐車確率は、各駐車場の駐車確率を加算した合計値P1でも良く、また、全ての駐車場を経由した場合にいずれかの駐車場に駐車できる確率P2や、全駐車場に対する駐車確率の平均値P3でもよい。
ユーザは、案内された各領域毎の合計駐車確率を参考に、いずれの領域内で駐車場を探したらよいかを決定することができる。
【0009】
また、いずれか1の領域を選択すると、選択された領域内に存在する複数の駐車場(全駐車場でも一部でもよい)を経由して目的地に到達する経路を探索し、各経路及び経由する駐車場を案内する。
経由する駐車場に到着すると、その駐車場を含めて到着済みの駐車場を除いた残りの経由する駐車場(未到着の経由する駐車場)を対象とする合計駐車確率を案内する。
このように経由する駐車場に到着する毎に未到着の経由する駐車場の合計駐車確率を表示することで、ユーザは、到着した駐車場に止めるか、他の駐車場に止めるかを判断することができる。
この場合、合計駐車確率だけでなく、到着した駐車場と他の駐車場の位置、及び目的地を地図上に表示することでユーザは到着した駐車場に駐車するか他の駐車場に駐車するかを目的地との位置関係も考慮して決定することができる。
さらにユーザの判断情報として、到着した駐車場の駐車確率も表示するようにしてもよい。
未到着の経由する駐車場の合計駐車確率については、いずれかの駐車場に到着する毎に計算しても良く、複数の駐車場を経由して目的地に到達する経路が探索された時点で算出しておいてもよい。
【0010】
なお、本実施形態では、M個の駐車場を順次経由していき、最初の空き駐車場に駐車することを前提としている。
【0011】
(2)実施形態の詳細
図1は本実施形態が適用されるナビゲーション装置のシステム構成図である。
このナビゲーション装置は、車両に搭載され、この図1に示すように、現在位置検出装置10、情報処理制御装置20、入出力装置40及び情報記憶装置50とを備えている。
【0012】
現在位置検出装置10は、以下のように構成されている。
方位センサ12は、基準角度(絶対方位)に対して、相対的に変化した角度を検出する手段であり、本実施形態では、角速度を利用して角度の変化を検出するジャイロセンサを使用している。なお、ハンドルの回転部に取り付けた光学的な回転センサや回転型の抵抗ボリューム或いは車輪部に取り付ける角度センサでもよい。また、方位センサ12として、例えば、磁石に基づいてN方向の検出から、車両がいずれの方向に位置するかを検出する地磁気センサであり、絶対方位を検出する手段であってもよい。
【0013】
距離センサ13は、車両の移動距離を計測できる手段であり、例えば、車輪の回転を検出して計数するものや、加速度を検出して2回積分するものを使用する。
GPS(グローバル・ポジショニング・システム)受信装置14は、人工衛星からの信号を受信する装置であり、信号の発信時刻、受信装置の位置情報、受信装置の移動速度、受信装置の進行方向など様々な情報を得ることができる。
【0014】
情報処理制御装置20は、現在位置検出装置10、入出力装置40から入力される情報及び情報記憶装置50に格納された情報に基づいて演算及び制御を行うとともに、演算結果をディスプレイ42、プリンタ43またはスピーカ44等の出力手段に出力するように制御する手段である。
【0015】
この情報処理制御装置20は、以下のように構成されている。
中央処理装置(CPU)21は、ナビゲーション装置全体の総括的な演算及び制御を行う。
ROM22は、目的地までの経路の探索、表示案内や音声案内等のナビゲーションに関する通常の目的地設定プログラムや経路探索処理プログラムや経路案内処理プログラムの他、本実施形態における合計駐車確率案内処理プログラムや経路探索処理プログラムや経路案内処理プログラム、等の各種プログラムを格納している。なお、ROM22を第1ROMと第2ROMの2つに分け、第2ROMに音声案内に関するナビゲーションプログラムを格納し、他のプログラムを第1ROMに格納するようにしてもよい。
センサ入力インターフェイス23は、現在位置検出装置10からの情報を受け取る手段である。
【0016】
RAM24は、入力装置41により入力された目的地の情報、通過地点の情報等の利用者が入力した情報を記憶すると共に、利用者の入力情報に基づいてCPU21により演算された結果や、経路探索された結果、または情報記憶装置50から読み込まれた地図情報を格納するための記憶手段である。
【0017】
通信インターフェイス25は、伝送路45を介して各種情報の入出力するための手段である。具体的には、伝送路45を介して、GPS受信装置14、入力装置41、プリンタ43、情報記憶装置50が接続される。
時計28は、例えば、水晶振動子などを用いて構成されており、時刻を刻んだり、発振によってナビゲーション装置の各部の動作タイミングを提供したりする。
その他、CPU21で処理されたベクトル情報を画像情報に処理するための画像処理専用の画像プロセッサ、画像プロセッサで処理された画像情報を格納する画像メモリ、情報記憶装置50から読み込まれた音声情報を処理しスピーカ44に出力する音声処理専用の音声プロセッサを配設するようにしてもよい。
【0018】
入出力装置40は、利用者により目的地、通過地点、探索条件等のデータを入力する入力装置41、画像を表示するディスプレイ42、情報を印刷するプリンタ43、音声を出力するスピーカ44より構成される。
入力装置41は、例えば、タッチパネル、タッチスイッチ、ジョイスティック、キースイッチ等で構成される。
ディスプレイ42には、現在地周辺の地図や、目的地までの走行経路が表示される。
なお、入出力装置40は、プリンタ43を有しない構成としてもよい。
【0019】
情報記憶装置50は、伝送路45を介して情報処理制御装置20に接続される。
情報記憶装置50は、地図データファイル51、駐車場データファイル52、その他のデータファイル53を格納している。
この情報記憶装置50は、一般的には、光学的記憶媒体であるDVD−ROM、CD−ROMや磁気的記憶媒体であるハードディスクなどで構成されるが、光磁気ディスク、各種半導体メモリなどの各種情報記憶媒体で構成してもよい。
なお、書き換えが必要な情報については、書き換え可能なハードディスク、フラッシュメモリなどで構成し、その他の固定的な情報についてはCD−ROM、DVD−ROMなどのROMを使用するようにしてもよい。
【0020】
地図データファイル51には、ナビゲーションにおける地図表示、経路探索、経路案内に必要な各種データとして、地図データ、道路データ、目的地データ、その他のデータが記憶されている。
地図データとしては、全国道路地図、各地域の道路地図または住宅地図等が記憶されている。道路地図は、主要幹線道路、高速道路、細街路等の各道路と地上目標物(施設等)から構成される。住宅地図は、地上建造物等の外形を表す図形及び、道路名称等が表示される市街図である。細街路とは、例えば、国道、県道以下の道幅が所定値以下の比較的狭い道路である。
地図データは、車両現在位置やユーザに指定された地点を含む、所定縮尺による一定範囲の地図がディスプレイ42に表示される。この地図上には、車両の現在位置や指定された地点が表示される。
【0021】
道路データは、各道路の位置と種類及び車線数及び各道路間の接続関係等の道路に関するデータで、ノードデータとリンクデータで構成される。この道路データは、経路探索やマップマッチングに使用されると共に、探索した走行経路を地図データ上に重ねて表示する場合にも使用される。
ノードデータは、地図上において経路探索に利用される各ノードの地理座標データ等を表したデータである。
例えば、交差点などの道路の接続点はノードにより表され、接続点の間の道路(即ち道路の内分岐しない領域)はリンクによって表される。このように、ノードデータ経路の接続関係を表した経路データとして機能している。
なお、進入禁止や一方通行など、交通規制により走行が制限されるものに関しては、これを表す属性が、各リンクに付与されているが、これらの属性については、交差点ノードに付与するようにしてもよい。
ノードデータは、各交差点に対して常に設定される交差点ノードと共に、各交差点間の特徴的な点(例えば、カーブの開始、中間、終了の各地点や、高度が変化する地点など)に補助的に設定される場合がある補助ノードが存在する。交差点ノードには、交差点の地理的位置座標や名称等の交差点に関する情報が含まれる。
【0022】
目的地データは、主要観光地や建物、電話帳に記載されている企業・事業所等の目的地になる可能性の高い場所や施設等の位置と名称等のデータである。
目的地データには、施設としての駐車場も含まれ、いずれかの目的地(駐車場を除く)がユーザにより設定されると、本実施形態の合計駐車確率案内処理の対象として、設定された目的地周辺の駐車場が検索される。
【0023】
駐車場データファイル52には、目的地データに含まれる各駐車場の満空情報が格納されている。表示における満空情報としては、各駐車場に駐車できる駐車確率が、曜日及び時間帯毎に保存されている。この満空情報は、リアルタイムに取得するものでも、また統計情報等による場合でも、その両者であってもよい。
統計による満空情報は、過去の駐車場の空き情報を曜日毎及び時間帯毎に累積記憶し、累積された空き情報の統計結果に基づいて曜日毎及び時間帯毎の満空情報が算出される。この満空情報は、各駐車場に設置された情報処理装置や情報センタが算出する。
なお、更に季節毎や月毎を加えたより詳細な分類で駐車確率を保存するようにしてもよい。
また、特定の行事日(例えば、元旦や祭日等)のように通常とは駐車量が異なる場合には、かかる特定の行事日における駐車確率を保存するようにしてもよい。この場合にも時間帯毎に駐車確率を保存するようにしてもよい。
【0024】
本実施形態における満空情報は、各駐車場についての満空情報を収集した特定のデータを、情報センタからの通信、またCD等の記憶媒体からの読み込み、その他各種方法により入手して駐車場データファイル52に保存する。
満空情報の収集については、所定の情報センタから逐次取得して更新するようにしても、個別に各駐車場から直接入手するようにしてもよい。
【0025】
その他のデータファイル53には、例えば、各種施設や観光地、または主要な交差点等の視覚的表示が要求される場所を写した写真の画像データや、設定した走行経路を音声により案内する場合の音声データ等が記憶されている。
【0026】
次に、以上のように構成された実施形態の動作について説明する。
なお、説明する合計駐車確率案内は、目的地が設定された場合に、その周辺に存在する複数の駐車場を、領域毎に分割し、各領域の合計駐車確率を算出して案内するものである。
この場合、地図画面等に本実施形態の駐車場経路探索を指示する駐車場キーを配置し、この駐車場キーが選択された場合に、以下説明する合計駐車確率案内を実行する。
【0027】
図2は、合計駐車確率案内処理の内容を表したフローチャートである。
まず情報処理制御装置20は、目的地を取得する(ステップ10)。この実施形態では、車両に搭載されたナビゲーション装置を前提としているため、目的地の取得はナビゲーション機能における目的地設定処理においてユーザが設定した目的地を取得することになる。
【0028】
次に情報処理制御装置20は、取得した目的地を含む所定領域、たとえば、目的地から所定距離Rmを半径とする領域内の駐車場を、地図データファイル51の目的地データに基づいて検索する。そして、駐車場が存在するか否かについて判断し(ステップ11)、存在しない場合には(ステップ11;N)メインルーチンにリターンする。
本実施形態において所定距離Rmは500mに設定されている。この所定距離は最も離れた地点に存在する駐車場から目的地まで徒歩で移動可能な距離として設定されている。なお、より長い距離、例えば、R=1km、2kmとしてもよく、ユーザの好みにより変更することができるようにしてもよい。
【0029】
一方、駐車場が存在する場合(ステップ11;Y)、情報処理制御装置20は、目的地の周囲Rmの領域を、半径rm毎の領域に分割する(ステップ12)。領域なお、半径Rをn(n=2又は3等)等分した領域に分割するようにしてもよい。
【0030】
次に情報処理制御装置20は、半径Rmの所定領域内に存在する駐車場毎の駐車確率を駐車場データファイル52の満空情報から取得する(ステップ13)。
【0031】
次に情報処理制御装置20は、分割した領域内に存在する駐車場の合計駐車確率(領域全体の駐車確率)を各領域毎に算出する(ステップ14)。
合計駐車確率は、各駐車場の駐車確率を加算した合計値P1でも良く、また、全ての駐車場を経由した場合にいずれかの駐車場に駐車できる確率P2や、全駐車場に対する駐車確率の平均値P3でもよいが、本実施形態では確率P2を採用している。
【0032】
いずれかの駐車場に駐車できる確率P2は、各駐車場に駐車できない確率から次のようにして求める。
ある駐車場mの駐車確率がpm(≦1)である場合、この駐車場mに駐車できない確率qmはqm=(1−pm)となる。
M個の駐車場のいずれにも駐車することができない確率Qは、Q=q1×q2×…×qmから求まる。
そして、M個の駐車場のいずれかに駐車できる確率P2は、P2=(1−Q)となる。
【0033】
情報処理制御装置20は、算出した領域毎の合計駐車確率P2を案内して(ステップ15)メインルーチンにリターンする。
領域毎の合計駐車確率P2はディスプレイ42の案内画面に表示される。
なお、情報処理制御装置20は、算出した領域毎の合計駐車確率については、案内画面表示のため、及び、後述の経路探索処理のためにRAM24に保存しておく。
【0034】
図3は、駐車領域とその合計駐車確率を案内する案内画面の表示例を示したものである。
この図3に示されるように情報処理制御装置20は、案内画面に目的地Gを中心にして半径Rmの所定領域を、目的地Gからの距離に応じてrm毎に分割した領域1と領域2を区別可能に表示する。図3(a)の例では、領域の境界線を表示することで区別している。
そして、情報処理制御装置20は、各領域に対して算出した合計駐車確率(領域全体の駐車確率)を各領域毎に表示する。図3(a)の例では、領域1の合計駐車確率として20%が、領域2の合計駐車確率として50%が表示されている。このように、算出した合計駐車確率0.2と0.5はユーザの認識を容易にするために百分率表示にしてある。
【0035】
一般にある施設周辺に存在する駐車場は、その施設に近いほど駐車してからの移動距離が短いことから個別の駐車確率は低くなる。逆に施設から離れるほど個別駐車確率は高くなるが駐車後の移動距離が長くなる。
本実施形態では、目的地を中心とした距離に基づいて領域を分割しているので、目的地に近い領域1は合計駐車確率が20%と低く、目的地から離れた領域2は合計駐車確率が50%と高くなっている。
ユーザは、各領域合計駐車確率と目的地Gからの距離関係を認識したうえで、自分が駐車したい領域を選択することができる。
【0036】
また図3(a)に示すように、各領域における目的地Gを中心とした位置関係に従って各駐車場Pが表示されている。
これによりユーザは各領域の駐車場が、領域内にどのように分散しているのかも併せて認識することができる。例えば、複数の駐車場が領域の一カ所に集中しているのか、全体に分散しているのか、目的地付近に多いのか少ないのか等を併せて認識することができる。
【0037】
さらに、ユーザが領域を選択する際の有用な情報として、駐車場の名称や駐車料金を表示し、又は/及び、個別の駐車確率を表示するようにしてもよい。
さらに、案内画面の表示は地図画面上に、目的地G、各領域1、2、各駐車場、及び各領域の合計駐車確率を表示するようにしてもよい。
【0038】
図3(b)は、合計駐車確率を表示する場合の他の例を表したものである。
図3(a)では合計駐車確率を百分率で20%、50%等と表示したが、図3(b)の例では、合計駐車確率を各領域全体の色で区別表示している。
例えば、合計駐車確率が20%以下の場合に赤色、20%を超え60%以下を黄色を、60%を超える場合を青で表す。
【0039】
次に、所定領域を複数に分割した領域に基づく経路探索処理について、図4のフローチャートを参照して説明する。
情報処理制御装置20は、ユーザによって選択された領域を取得する(ステップ16)。
本実施形態においてユーザによる領域の選択は、合計駐車確率案内処理で合計駐車確率を表示した案内画面(図3)において、ユーザが選択した領域を取得する。
なお、案内画面においてユーザが領域を選択する場合には、その領域1、2の表示領域をタッチし、又は領域番号を併せて表示しテンキーなどから領域番号に対応する数字を入力する。情報処理制御装置20は、タッチされた位置がどの領域かを検出することで、又は入力された数字を取得することで選択された領域を認識する。
なお、案内画面を見て領域を選択するのではなく、より目的地に近い領域、合計駐車確率が高い領域等の領域選択基準をユーザに提示し、ユーザが領域選択基準を予め選択しておくことで領域を選択するようにしてもよい。この場合、情報処理制御装置20は、ユーザにより予め選択された選択基準に従い、分割した各領域のなかから1の領域を取得する。
【0040】
次に情報処理制御装置20は、取得した領域内の駐車場を経由する走行経路を探索し、探索した走行経路をRAM24に保存して(ステップ17)、メインルーチンにリターンする。
この走行経路の探索は、各駐車場を経由して設定された目的地Gまでの走行経路を探索しても、いずれかの駐車場まで他の駐車場を経由する走行経路を探索するようにしてもよく、またユーザがいずれかを選択するようにしてもよい。
【0041】
領域内に存在する各駐車場を経由する順序については、目的地Gに近い順、すなわち、目的地Gからの距離(直線距離でも、走行経路による距離でもよい)が小さい順に設定する。
なお、本実施形態では領域内に存在する全ての駐車場を経由対象としているが、個別の駐車確率が所定値以上である駐車場だけを経由対象とし、又は、駐車確率が高い上位所定数の駐車場を経由対象としてもよい。この場合においても、経由する順番は目的地Gに近い順番とする。
【0042】
以上の経路探索処理により走行経路が探索され、車両の走行が開始されると、情報処理制御装置20は、探索した走行経路に基づく経路案内処理を実行する。
なお、情報処理制御装置20は、通常の経路探索と同様に、複数の走行経路を探索してユーザに提示し、選択された走行経路を案内対象とするようにしてもよい。
【0043】
図5は、選択された領域内の駐車場を経由する経路案内処理を表したフローチャートである。
情報処理制御装置20は、車両が走行を開始すると、走行経路をRAM24から取得し(ステップ21)、取得した走行経路に従って案内を行う(ステップ22)。
この走行経路案内は、従来から行われている走行経路の案内と同様であり、例えば、次のようにして行われる。
すなわち、情報処理制御装置20は、現在位置検出装置10で現在位置を検出し、情報記憶装置50の地図データファイル51から現在位置周辺の地図情報を読み込みディスプレイ42に表示する。また、経由する各駐車場と案内対象の走行経路を地図表示に合わせてディスプレイ42に表示する。
そして、情報処理制御装置20は、現在位置検出装置10によって検出された現在位置を追跡することにより、経路案内を行う。
経路案内は、探索した走行経路に対応する道路データと現在位置検出装置10で検出される現在位置とのマップマッチングにより地図上の車両位置を特定し、車両現在位置周辺の地図をディスプレイ42に表示し、探索した走行経路を地図上に表示すると共に、車両の現在位置を示す現在位置マーク(例えば、円内に進行方向を向いた△や矢印等で表示)を地図上に表示する。
また、探索した走行経路と現在位置との関係から、案内の必要性、すなわち直進が所定距離以上続く場合、所定の進路変更地点等の走行経路の案内、及び方面案内が必要か否か等について判断し、必要である場合にはディスプレイ42の表示及び音声による案内を実行する。
【0044】
情報処理制御装置20は、車両が経由する駐車場に到着したか否かを判断し(ステップ23)、駐車場でなければ(ステップ23;N)、ステップ22に戻って経路案内を継続する。
一方、経由する駐車場に到着した場合(ステップ23;Y)、情報処理制御装置20は、経由する駐車場のうち案内済みの駐車場を除いた残りの駐車場(以下、残駐車場という)に関する駐車確率をユーザに案内する(ステップ24)。
ここで案内する残駐車場に関する駐車確率は、残駐車場に対する合計駐車確率(P1、P2、又はP3)、又は/及び残駐車場の個別の駐車確率である。いずれの場合においても残駐車場に関する駐車確率は、地図、走行経路、目的地、経由駐車場(案内済みの駐車場を含めてもよい)、と共にディスプレイ42に表示する。
【0045】
残駐車場に関する駐車確率を表示した後、情報処理制御装置20は、案内(経由)した駐車場に駐車したか否かを判断する(ステップ25)。
ここで、案内した駐車場にユーザが駐車しない場合としては、満車のために駐車できない場合、及び、駐車可能であるが残駐車場に関する駐車確率の表示を確認することで駐車しなかった場合がある。
案内した駐車場を通過した場合や駐車場の中に入ったとしてもそのまま駐車場外に出てきた場合には駐車しない場合と判断する。
【0046】
案内した駐車場に駐車した場合には(ステップ25;Y)、メインルーチンにリターンする。
ここで、駐車場内でイグニッションオフや案内終了の入力がされた場合には駐車可能であったと判断する。
【0047】
案内した駐車場に駐車せずに走行を継続した場合(ステップ25;N)、情報処理制御装置20は、次の案内対象となっている経由駐車場が存在するか否かを確認する(ステップ26)。
次の案内対象となっている経由駐車場が存在する場合には(ステップ26;Y)、情報処理制御装置20は、ステップ22に戻り、次の駐車場までの経路案内を継続する。
【0048】
一方、次の案内駐車場が無い場合、すなわち、案内した駐車場が経由する最後の駐車場である場合(ステップ26;N)、情報処理制御装置20は、メインルーチンにリターンする。
【0049】
なお、次の案内駐車場が無い場合(ステップ26;N)、情報処理制御装置20は、他の領域についての経路探索及び案内を行うか否かを問い合わせ、肯定的入力である場合に、未案内の他領域についての経路探索及び経路案内を行うようにしてもよい。
他の領域が複数存在する場合には、問い合わせの際に他の複数領域毎に再度合計駐車確率を案内して次の領域をユーザに選択してもらうようにする。また、ユーザが予め選択基準を選択している場合には、当該選択基準に従った次の領域を自動選択するようにしてもよい。
【0050】
以上説明したように本実施形態によれば、次の各効果を得ることができる。
(1)目的地周辺を複数の領域に分割し、領域毎の合計駐車確率が案内されるので、ユーザは、案内された各領域毎の合計駐車確率を参考に、いずれの領域内で駐車場を探したらよいかを決定することができる。
(2)経由駐車場に着く毎に残駐車場に関する駐車確率が案内されるので、ユーザは、到着した駐車場に駐車するか、他の駐車場に止めるかを判断することができる。
【0051】
以上、本発明のナビゲーション装置及びナビゲーションプログラムにおける1実施形態について説明したが、本発明は説明した実施形態に限定されるものではなく、各請求項に記載した範囲において各種の変形を行うことが可能である。
例えば、説明した実施形態では車載のナビゲーション装置について説明したが、情報センタの情報処理サーバ等に説明した各ナビゲーション装置の機能を持たせるようにしてもよい。
この場合の情報センタでは、車載ナビゲーション装置から通信により目的地を取得し、取得した目的地周辺の駐車場を本実施形態で説明した合計駐車確率案内処理(図2)を行う。
但し情報処理制御装置20は、算出した領域毎の合計駐車確率の案内(ステップ15)として、図3に示す案内画面を車載ナビゲーション装置に送信することで行う。この場合も、図3で説明した案内画面に関する各種変形と同様の情報を車載ナビゲーション装置に送るようにしてもよい。
【0052】
また、情報センタが説明した実施形態のナビゲーション機能を備える場合、車載ナビゲーション装置のユーザから領域の選択情報を取得して経路探索処理(図4)を実行し、探索した走行経路を車載ナビゲーション装置に送信する。
【0053】
なお、経路案内処理(図5)は、車載ナビゲーション装置において実行することになるが、情報センタが、各駐車場に到着した場合に表示する残駐車場に関する駐車確率を、各駐車場毎に予め算出しておき、走行経路を探索して車載ナビゲーション装置に送信する際に併せて送信する。
但し、各経由駐車場に到着する毎に車載ナビゲーション装置が、到着した駐車場を情報センタに送信し、該送信を受けて情報センタが残駐車場に関する駐車確率を車載ナビゲーション装置に送信するようにしてもよい。
【0054】
また、経由途中の駐車場で駐車した場合、その駐車場から目的地までの歩行による移動経路を画面表示するようにしてもよい。
この場合、駐車時に目的地までの歩行移動経路を探索して表示するが、予め経路探索処理(図4)において、経由する各駐車場から目的地までの歩行移動経路のそれぞれを探索しておき、駐車時にその駐車場からの歩行移動経路を表示するようにしてもよい。
駐車するか否かは、例えば、音声や画面表示による問い合わせを行い、その回答(音声認識、肯定キーの選択)により判断する。
【0055】
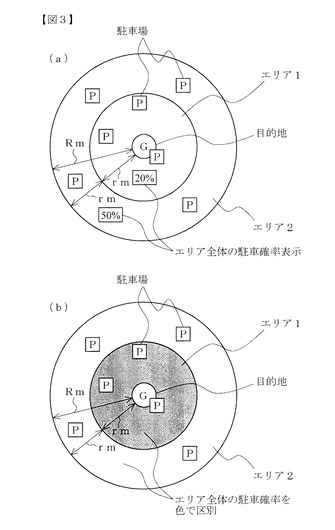
また、説明した実施形態では、所定領域、分割された領域の中心を目的地としたが、車両位置に基づいて中心位置を変更してもよい。
例えば、図3では半径rm、Rmの各中心点を目的地としたが、図6に示すように、各中心点を車両の現在位置側に移動させた領域としてもよい。すなわち、目的地Gと車両位置を結ぶ直線上で中心を目的地Gから車両側に移動する。この移動量は各半径以下とする。
このようにすることで、目的地よりも手前側で駐車しやすくなる。
【0056】
また説明した実施形態では、距離rm毎に領域を分割する場合について説明したが、駐車場の数により領域を分割するようにしてもよい。
例えば、目的地Gからの直線距離(又は走行経路による距離)が近い順に駐車場を並べ、上位s箇所(例えば、5カ所、10カ所等)毎に領域を分割する。
また、半径Rmの所定領域内に存在する全駐車場数をUとし、分割領域数をvとした場合に、目的地Gから近い順にU/v箇所の駐車場を含む領域に分割するようにしてもよい。
【符号の説明】
【0057】
10 現在位置検出装置
20 情報処理制御装置
21 CPU
40 入出力装置
50 情報記憶装置
51 地図データファイル
52 駐車場データファイル
【特許請求の範囲】
【請求項1】
目的地を取得する目的地取得手段と、
前記取得した目的地を含む所定領域内に存在する駐車場を検索する駐車場検索手段と、
前記検索した駐車場毎に駐車可能な駐車確率を取得する駐車確率取得手段と、
前記所定領域を目的地からの距離に基づいて複数の領域に分割する分割手段と、
前記分割した複数の領域について、各領域内に存在する駐車場の駐車確率を取得し、各領域毎に、領域全体の駐車確率を案内する案内手段と、
を具備することを特徴とするナビゲーション装置。
【請求項2】
前記分割手段は、前記所定領域と前記分割した複数の領域の中心は、車両位置に基づいて複数の領域に分割する、
ことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
各領域内に存在する駐車場を経由する走行経路を探索する経路探索手段を備え、
前記経路探索手段は、選択された領域内に存在する駐車場のうち、所定数の駐車場を前記目的地に近い順に経由する走行経路を探索する、
ことを特徴とする請求項1に記載のナビゲーション装置。
【請求項4】
前記探索した走行経路に従い、前記走行経路と経由する駐車場を案内する経路案内手段と、
を具備することを特徴とする請求項3に記載のナビゲーション装置。
【請求項5】
前記案内手段は、車両が前記走行経路上のいずれかの駐車場に到着した場合、到着した駐車場を除いた経由する駐車場全体の駐車確率を案内することを特徴とする請求項4に記載のナビゲーション装置。
【請求項6】
目的地を取得する目的地取得機能と、
前記取得した目的地を含む所定領域内に存在する駐車場を検索する駐車場検索機能と、
前記検索した駐車場毎に駐車可能な駐車確率を取得する駐車確率取得機能と、
前記所定領域を目的地からの距離に基づいて複数の領域に分割する分割機能と、
前記分割した複数の領域について、各領域内に存在する駐車場の駐車確率を取得し、各領域毎に、領域全体の駐車確率を案内する案内機能と、
をコンピュータに実現させることを特徴とするナビゲーション用プログラム。
【請求項1】
目的地を取得する目的地取得手段と、
前記取得した目的地を含む所定領域内に存在する駐車場を検索する駐車場検索手段と、
前記検索した駐車場毎に駐車可能な駐車確率を取得する駐車確率取得手段と、
前記所定領域を目的地からの距離に基づいて複数の領域に分割する分割手段と、
前記分割した複数の領域について、各領域内に存在する駐車場の駐車確率を取得し、各領域毎に、領域全体の駐車確率を案内する案内手段と、
を具備することを特徴とするナビゲーション装置。
【請求項2】
前記分割手段は、前記所定領域と前記分割した複数の領域の中心は、車両位置に基づいて複数の領域に分割する、
ことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
各領域内に存在する駐車場を経由する走行経路を探索する経路探索手段を備え、
前記経路探索手段は、選択された領域内に存在する駐車場のうち、所定数の駐車場を前記目的地に近い順に経由する走行経路を探索する、
ことを特徴とする請求項1に記載のナビゲーション装置。
【請求項4】
前記探索した走行経路に従い、前記走行経路と経由する駐車場を案内する経路案内手段と、
を具備することを特徴とする請求項3に記載のナビゲーション装置。
【請求項5】
前記案内手段は、車両が前記走行経路上のいずれかの駐車場に到着した場合、到着した駐車場を除いた経由する駐車場全体の駐車確率を案内することを特徴とする請求項4に記載のナビゲーション装置。
【請求項6】
目的地を取得する目的地取得機能と、
前記取得した目的地を含む所定領域内に存在する駐車場を検索する駐車場検索機能と、
前記検索した駐車場毎に駐車可能な駐車確率を取得する駐車確率取得機能と、
前記所定領域を目的地からの距離に基づいて複数の領域に分割する分割機能と、
前記分割した複数の領域について、各領域内に存在する駐車場の駐車確率を取得し、各領域毎に、領域全体の駐車確率を案内する案内機能と、
をコンピュータに実現させることを特徴とするナビゲーション用プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−179933(P2011−179933A)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願番号】特願2010−43585(P2010−43585)
【出願日】平成22年2月26日(2010.2.26)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願日】平成22年2月26日(2010.2.26)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]