
ナビゲーション装置、及び道路情報表示方法
【課題】自車が道路外に存在する場合であっても、測定した現在位置、或いは探索した経路等を確実に市街地図上の正確な場所に表示することが可能であるナビゲーション装置を提供する。
【解決手段】自車が特定の走行路を走行中に走行路を離脱したことをナビゲーション装置が検知すると、自車の現在位置を取得する。取得された現在位置が、道路地図データ上において、離脱先の建築物の範囲内に含まれているかどうかを確認し、含まれていない場合、離脱先建築物を示すポリゴン表示および市街地図画像内に自車位置を調整する。自車が離脱先建築物から前記走行路に復帰したことをナビゲーション装置の制御部が検知すると、自車位置を表示する手段を本発明の走行路外位置表示手段から、従来の現在位置表示手段に切り替える。
【解決手段】自車が特定の走行路を走行中に走行路を離脱したことをナビゲーション装置が検知すると、自車の現在位置を取得する。取得された現在位置が、道路地図データ上において、離脱先の建築物の範囲内に含まれているかどうかを確認し、含まれていない場合、離脱先建築物を示すポリゴン表示および市街地図画像内に自車位置を調整する。自車が離脱先建築物から前記走行路に復帰したことをナビゲーション装置の制御部が検知すると、自車位置を表示する手段を本発明の走行路外位置表示手段から、従来の現在位置表示手段に切り替える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載用のナビゲーション装置に関するものであり、特にナビゲーション装置が備える道路情報表示方法に関する。
【背景技術】
【0002】
近年、車載用のナビゲーション装置には多くの機能が設けられる傾向がある。特にユーザーにとって有用な機能としては、出発地から目的地までの経路を自動的に検索し、検索された経路を誘導経路として地図上に表示する経路検索機能が存在する。この機能を用いれば、出発地と目的地とを入力装置から入力することにより、出発地と目的地とを最適ルートで結ぶ誘導経路を自動的に検索し、LCD(液晶表示装置)等の表示装置に表示することが可能である。
【0003】
また、検索された誘導経路に従ってユーザーが走行を行う際に、誘導経路を地図上に表示し、併せて自車位置を表示することにより、ユーザーを目的地まで案内する誘導機能が存在する。この機能を用いれば、例えば走行中に交差点に近付いた際に、その交差点の拡大図(表示装置の所定の表示範囲内に表示される地図を、その表示要素数を減少させてデフォルメした図)を表示する等、走行中の経路に関する様々な情報をリアルタイムでユーザーに対して通知することが可能である。
【0004】
また、検索された誘導経路上に有料道路(高速道路等)が存在する場合において、有料道路の通行料金の決済をスムーズに行う為に、車両に設置した車載器と料金所に設けられた路側アンテナとの間で情報の送受信を行うことによりノンストップで料金決済を行うETC(Electronic Toll Collection System)と呼ばれる自動料金支払いシステムが存在する。ETCは、料金所等の決済場所に設けられた路側アンテナと、車両に設置された車載器との間で近距離無線通信を行うことにより、各種情報(車両ナンバー、通過時刻等)の送受信を行い、通行料金の決済を行うシステムである。
【0005】
上記のETC(自動料金支払いシステム)に於いて、車両に設置した車載器に専用のクレジットカード(通称、ETCカード)を挿入することで、車両が路側アンテナに接近すると自動的に近距離無線通信による通信を開始し、通行料金等の決済を行うことができる。そして、利用者が車両から降車する際には、ETCカードの盗難を防ぐ為に、車載器からETCカードを抜き取り保管することとなる。
【0006】
上記のような誘導経路表示機能を備えた従来のナビゲーション装置においては、自車位置の検出のために、例えば地磁気センサ、ジャイロスコープ、車速センサ、および衛星からの電波に基づいて車両の位置を検出するGPS(Global Positioning System)のためのGPS受信機等が用いられる。しかしながらGPSを用いた従来のナビゲーション装置では、自車位置は道路情報(道路を数値データとして表した処理用の情報)のノードやリンクの位置に完全に一致するように表示されるが、その上に市街地図を重ねて表示した場合、市街地図の道路や交差点上に自車位置が正確に表示される保証がないという問題があった。
【0007】
市街地図は、道路や建物等の輪郭を表した線分の集合にすぎない。このため、ナビゲーション装置は、市街地図においてどれが道路でどれが交差点であるかは認識していない。このため、道路情報に市街地図を重ねて表示した場合、単に緯度及び経度を一致させて重ね合わせることしかできず、市街地図の道路や交差点と、道路情報のリンクやノードとを一致させて重ねることができない。そのため、市街地図の道路や交差点と、道路情報の道路や交差点とが、位置的にずれて認識される可能性がある。結果として、自車位置が市街地図の道路や交差点からずれた位置、例えば道路外の建物内部などに表示されるケースが生じるという問題があった。
【0008】
上記の問題に関連して特許文献1においては、測定した現在位置、或いは探索した経路等を確実に市街地図の道路上に表示することを目的とした地図表示技術が開示されている。特許文献1の地図表示技術は、道路や建物の外枠形状が描かれた市街地図を表す市街地図データと、市街地図の道路及び交差点部分をポリゴンで表した道路ポリゴンデータとを読み出す地図データ読出し手段と、ユーザの現在位置を推定する位置推定手段とを備えている。また、推定した現在位置を道路ポリゴンの領域に入るように修正する自車位置調整手段と、市街地図データに基づいて市街地図画像を作成し、修正した現在位置を市街地図画像上に重ねて表示する現在位置表示手段を備えている。
【0009】
上記の特許文献1の発明によれば、ユーザー(例えば自動車)の推定現在位置を、市街地図の複雑な道路形状に精度良く一致した道路ポリゴンデータに対して位置調整する。従って、例外的な状況(自動車が広い駐車場に入る等)を除いて、常に市街地図の道路上に精度良くユーザの現在位置を表示することができる。
【0010】
しかしながら上記の特許文献1の地図表示技術においては、自車(ユーザー)が道路上に存在する場合は現在位置を高精度に表示することができるが、自車が道路から離れた場所(例えばサービスエリアやパーキングエリア等)に進入した場合、自車位置調整が行われず、従来と同様に自車位置が市街地図上の施設(サービスエリア等)からずれた位置に表示されてしまうという問題があった。また、仮に自車位置調整を行ったとしても、自車が道路外(サービスエリア等)に位置するにも関わらず、自車位置が道路上に補正されるため、実際の現在位置とズレが生じてしまうという問題があった。
【特許文献1】特開2001−41754号公報
【発明の開示】
【発明が解決しようとする課題】
【0011】
本発明は、上記の問題を解決するためになされたものであって、その目的は、自車が道路外に存在する場合であっても、測定した現在位置、或いは探索した経路等を確実に市街地図上の正確な場所に表示することが可能であるナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0012】
上記目的を達成するために本発明のナビゲーション装置は、
自車の現在位置を検出する自車位置検出手段と、
道路及び建築物の外枠形状を含んだ市街地図データを記憶する市街地図データ記憶手段と、
道路形状データをもとに道路及び建築物をポリゴン表示するポリゴン表示手段と、
前記自車位置検出手段により検出された自車位置周辺を前記ポリゴン表示手段を用いて表示する際に、道路を示すポリゴン上に前記自車位置が位置するように調整する自車位置調整手段と、
前記自車位置調整手段を用いて調整された自車位置の周辺を前記ポリゴン表示手段により表示するとともに、前記市街地図データを用いて作成された市街地図画像を重ねて表示する現在位置表示手段と、
を備えたナビゲーション装置において、
自車が特定走行路を走行中に、前記特定走行路より離脱したことを検知する離脱検知手段と、
前記離脱検知手段により離脱が検知された場合に、離脱先の建築物を示すポリゴン上に前記自車位置が位置するように調整し、調整した前記自車位置を前記市街地図画像上に重ねて表示する走行路外位置表示手段と、
を備えたことを特徴としている。
【0013】
この構成によると、
自車が特定の走行路(例えば有料道路等)を走行中に走行路を離脱したことをナビゲーション装置の制御部が検知すると、離脱先周辺の建築物(例えばサービスエリア等)をポリゴンデータおよび道路地図データを用いてを表示するとともに、自車の現在位置を取得する。取得された現在位置が、道路地図データ上において、離脱先の建築物の範囲内に含まれているかどうかを確認し、含まれていない場合、離脱先建築物を示すポリゴン表示および市街地図画像内に、自車の現在位置が含まれるように自車位置の調整を行う。
また、上記目的を達成するために本発明のナビゲーション装置は、
自車が前記離脱先建築物より前記特定走行路へ復帰したことを検知する復帰検知手段と、
前記復帰検知手段により特定走行路への復帰が検知された場合に、自車位置を表示する手段を前記走行路外位置表示手段から前記現在位置表示手段に切り替える切り替え手段と、
を備えたことを特徴としている。
【0014】
この構成によると、
自車が特定の走行路から離脱し、かつ離脱先から前記走行路に再び復帰したことをナビゲーション装置の制御部が検知すると、自車位置を表示する手段を本発明の走行路外位置表示手段から、従来の現在位置表示手段に切り替える。これにより、自車の現在位置を取得するとともに、取得された自車位置を従来の自車位置調整機能を用いて位置補正を行い、走行路上に自車位置を表示する。
【0015】
また、上記目的を達成するために本発明のナビゲーション装置は、
前記離脱検知手段において、予め自車の進行方向を記憶しておき、進行方向が一定時間内に一定角度以上変化したことを検知することにより、前記特定走行路から離脱したと判断することと、
前記復帰検知手段において、予め記憶された前記進行方向へ一定距離を走行したことを検知することにより、前記特定走行路への復帰が行われたと判断することと、
を備えたことを特徴としている。
【0016】
この構成によると、
自車両が特定走行路(有料道路等)を走行中に予め進行方向を記憶しておき、進行方向が急激に変化した(例えばサービスエリアに入るために90度の左折を行った)ことをきっかけに、自車が特定走行路から離脱したと判断する。また逆に、記憶された前記進行方向へ一定距離を走行したことを検知することにより、サービスエリア等を離脱し、もとの特定走行路へ復帰したことを判断する。
【0017】
また、上記目的を達成するために本発明のナビゲーション装置は、
前記特定走行路が有料道路に該当すること
を特徴としている。
【0018】
この構成によると、
有料道路を走行中に有料道路を離脱した場合、あるいは離脱先(サービスエリア等)から有料道路へ復帰した場合に、本発明の道路情報表示方法が用いられる。
【発明の効果】
【0019】
本発明の第一の構成によれば、
自車が特定の走行路から離脱した際に、離脱先周辺の建築物(例えばサービスエリア等)をポリゴンデータおよび道路地図データを用いてを表示する場合に、自車位置を離脱先建築物の領域内に含まれるように調整して表示する。これにより、自車が走行路から離脱した場合において、実際の現在位置と、ポリゴン表示および市街地図画像により示される自車位置との間にズレが生じることがない。走行路上にいる場合と同様に、所定の領域内(例えばサービスエリア内等)に正確に自車位置を表示することが可能となる。
【0020】
本発明の第二の構成によれば、
自車が特定の走行路から離脱し、かつ離脱先から前記走行路に再び復帰したことをナビゲーション装置の制御部が検知すると、自車位置を表示する手段を本発明の走行路外位置表示手段から、従来の現在位置表示手段に切り替える。このため、自車が走行路外から走行路に復帰した場合においても自車位置の調整が行われるため、引き続き正確な位置情報を表示することが可能である。
【0021】
本発明の第三の構成によれば、
自車両が特定走行路を走行中に予め進行方向を記憶しておき、進行方向が急激に変化したことをきっかけに、自車が特定走行路から離脱したと判断する。また逆に、記憶された前記進行方向へ一定距離を走行したことを検知することにより、サービスエリア等を離脱し、もとの特定走行路へ復帰したことを判断する。このため、自車の走行路外への離脱及び走行路への復帰を確実かつ容易に検知することが可能である。
【0022】
本発明の第四の構成によれば、
有料道路を走行中に有料道路を離脱した場合、あるいは離脱先から有料道路へ復帰した場合に、本発明の道路情報表示方法が用いられる。このため、一般道路のように比較的頻繁に走行路外へ離脱することが想定される道路においては本発明の道路情報表示方法は機能せず、比較的走行路外へ離脱することが少ない有料道路においてのみ本発明の道路情報表示方法が機能するため、誤作動を防止することが可能である。
【発明を実施するための最良の形態】
【0023】
本発明の実施の一形態について、図面に基づいて説明すれば、以下の通りである。
[実施の形態]
〈1.ナビゲーション装置の内部構成について〉
ここで、本発明の第一の実施形態におけるナビゲーション装置1の電気回路システムの要部構成を、図2のブロック図を用いながら説明する。
【0024】
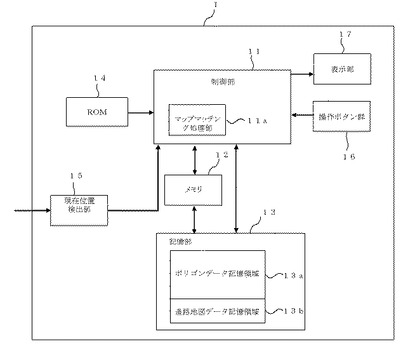
図2のブロック図に示すように、本発明のナビゲーション装置1は、少なくとも、制御部11、メモリ12、記憶部13、ROM14、現在位置検出部15、操作ボタン群16、および表示部17を含むように構成されている。
【0025】
制御部11は、ナビゲーション装置1の各部材の駆動を有機的に制御することによりナビゲーション処理(経路の検索、道路データの表示等)を統括制御するための中央処理装置である。また制御部11は、各装置(例えば記憶部13等)の制御やデータの計算、加工処理等を行なう中枢部分となっている。また制御部11は、マップマッチング(自車位置調整)処理部11aを含むように構成されている。マップマッチング処理部11aは、後述する現在位置検出部15により検出された現在位置と、道路地図データとの間のマップマッチングを行なう処理回路である。マップマッチング処理部11aは、現在位置検出部15からGPS位置データを受けると共に、自車の最近の速度、進行方向、軌跡等から現在の自車位置を推定し、経路情報等の表示処理の際に、地図上の自車位置が必ず道路上に位置するように補正する(推定位置が道路外であっても、強制的に近傍の道路上に修正する)機能を備えている。
【0026】
メモリ12は、ナビゲーション装置1が保持する各種データを一時的に記憶する媒体であり、例えば書込可能なRAM(Random Access Memory)等により構成されている。メモリ12は、例えば制御部11によって各種ナビゲーション処理が行われる際の処理データや、ユーザーから受けた指示命令等を一時的に記憶しておくためのバッファメモリとしての役割を持つ。
【0027】
記憶部13は、ナビゲーション装置1が保持する各種データ(道路データ、録音データ等)を記録するための記憶媒体である。なお、記憶部13は、複数の領域(パーティション)に物理的に分割されており、記憶するデータの種別に応じて領域別に記憶することがより望ましい。記憶部13は少なくとも、ポリゴンデータ(道路等の構成形状を立体的に示すためのデータ)を記憶する領域であるポリゴンデータ記憶領域13aと、道路地図データを記録する領域である道路地図データ記憶領域13bとを含むように構成されている。
【0028】
ROM(Read Only Memory)14は、例えば制御部11を用いた各種処理(例えば経路検索処理等)を行うためのプログラムデータを記憶するための媒体であり、ユーザーは情報の読み出しのみが可能となっている。
【0029】
現在位置検出部15は、ナビゲーション装置(ひいてはナビゲーション装置を搭載している車両)の現在位置を特定するための回路である。現在位置検出部15は、例えば地磁気センサ、ジャイロスコープ、車速センサ、および衛星からの電波に基づいて車両の位置を検出するGPS(Global Positioning System)のためのGPS受信機等からの情報を受信する。これらの装置により取得された情報をもとに、現在位置検出部15は車両の現在位置を特定する。
【0030】
操作ボタン群16は、ユーザーが道路検索の指示や道路情報の表示指示等をナビゲーション装置1に対して行なうための入力インターフェースである。表示部17は、ナビゲーション装置1の各種情報をユーザーに対して表示するための出力インタフェースである。
〈2.道路情報表示工程について〉
ここで、本発明のナビゲーション装置1における道路情報表示処理の処理工程を、図1のフロー図と、図2のブロック図とを用いながら説明する。
【0031】
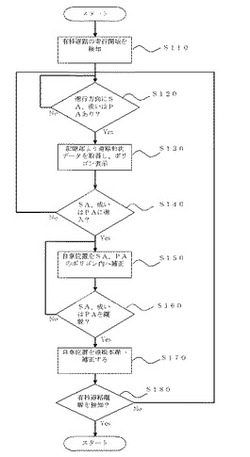
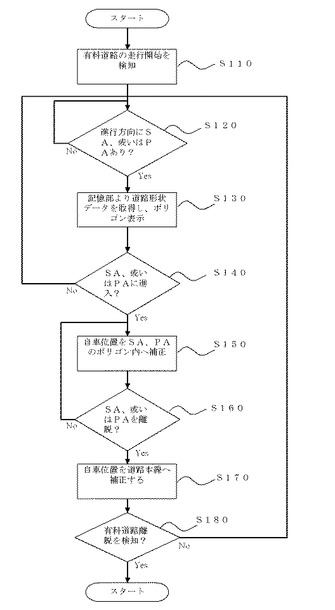
図1に示すように、例えば制御部11がユーザーによる有料道路(特定走行路)の走行開始を検知することにより、本発明の道路情報表示処理が開始される(S110)。なお、有料道路の走行検知は、例えば現在位置検知部15と記憶部13に記憶されている道路地図データとを用いて、走行経路を常時監視すること等により行われる。
【0032】
有料道路の走行を検知した制御部11は、経路情報を元に、進行方向にサービスエリア(以後SAと省略して記述する)或いはパーキングエリア(以後PAと省略して記述する)が存在するかどうかのチェックを行う(S120)。PA或いはSAが存在する場合は、次のS130の処理に移行する。PA或いはSAが存在しない場合は、引き続きPAおよびSAの監視を継続する。
【0033】
前記S120において経路上にPA或いはSAを検知した制御部11は、記憶部13のポリゴンデータ記憶領域13aに記憶されているポリゴンデータ(道路形状データ)を読み出し、読み出したデータをもとに自車周辺経路のポリゴン画像を作成し、表示部17を用いて表示する(S130)。
【0034】
制御部11は、前記S120において検知されたPA或いはSAに、自車が進入したかどうかのチェックを行う(S140)。自車が進入している場合は、次のS150の処理に進む。進入していない場合は、前記S120の処理に移行し、引き続きPAまたはSAの監視を行う。なお、自車がPAまたはSAへ進入したかどうかのチェック方法としては、例えば予め自車の進行方向を記憶しておき、進行方向が急激に変化(例えば進行方向が90度以上変化)した場合に、有料道路を外れてPAまたはSAに進入したと判断する方法が考えられる。また例えば、速度が急激に変化した(例えば時速20Kmを下回った)場合に、PAまたはSAに進入したと判断する方法であってもよい。
【0035】
前記S140において、自車がPA或いはSAに進入したと判断された場合、S130の処理において表示部17に表示されているポリゴン画像に対して、自車位置がPA或いはSA上に表示されるように、ポリゴン画像に対して補正を行う(S150)。例えば自車が道路から外れた場合、従来技術による位置補正機能(マップマッチング機能)が無効となるため、自車位置はGPSにより得られた大まかな位置情報をもとに表示されることとなる。GPSによる位置の特定は誤差が大きいため、得られた位置情報がPA或いはSA上ではなく、例えば平野や森林を指し示してしまう場合がある。このような場合においても、前記S140において自車がPA或いはSAに進入していることが明確となっているため、ポリゴン画像上の自車位置をPA或いはSA内に強制的に移動させ、表示部17を用いて表示する。
【0036】
自車がPA或いはSAに進入した後、制御部11は、自車がPA或いはSAを離脱したかどうかを一定周期で確認する(S160)。確認の結果、自車がPA或いはSAから離脱したと判断された場合は、次のS170の処理に移行する。逆に、依然として自車がPA或いはSAに存在していると判断された場合、前記S150の処理に移行する。なお、自車がPA或いはSAから離脱したかどうかの確認方法としては、例えばPA或いはSAに進入する直前における高速道路上の進行方向を記憶しておき、記憶しておいた進行方向と同一方向に一定距離を走行した場合にPA或いはSAを離脱したと判断する方法がある。また例えば、自車の速度が一定速度(例えば時速20km)を越えた場合に、PA或いはSAを離脱したと判断する方法であってもよい。
【0037】
前記S160において、自車がPA或いはSAを離脱したと判断された場合、制御部11は自車位置を有料道路内へ移動させ、有料道路上での位置補正処理を行う。なお、有料道路上での位置補正処理については従来技術と同様であるため、ここでは説明を省略する。
【0038】
制御部11は、例えば現在位置検知部15と、路地図データ記憶領域13bに記憶されている道路地図データとを用いて、自車が有料道路上を走行中であるかどうかの確認を行う(S180)。有料道路上を走行中である場合、前記S120の処理に移行する。逆に、有料道路からの離脱が検知された場合、本処理を終了する。
[その他の実施の形態]
以上、好ましい実施の形態及び実施例をあげて本発明を説明したが、本発明は必ずしも上記実施の形態及び実施例に限定されるものではなく、その技術的思想の範囲内において様々に変形して実施することができる。
【0039】
例えば前述した実施形態の機能を実現するソフトウェアのプログラムコードを記録した記憶媒体を、ナビゲーション装置1に供給し、そのナビゲーション装置1内のコンピュータ(例えばCPU)が記憶媒体に格納されたプログラムコードを読出し実行することによっても、達成されることは言うまでもない。
【0040】
この場合、記憶媒体から読出されたプログラムコード自体が、前述した実施形態の機能を実現することになり、そのプログラムコードを記憶した記憶媒体は本発明を構成することになる。
【0041】
なお、プログラムコードを供給するための記憶媒体としては、例えば、フロッピディスク、ハードディスク、光ディスク、光磁気ディスク、CD−ROM、CD−R、磁気テープ、不揮発性のメモリカード、ROMなどを用いることができる。
【0042】
また、コンピュータが読出したプログラムコードを実行することにより、前述した実施形態の機能が実現されるだけでなく、そのプログラムコードの指示に基づき、コンピュータ上で稼働しているOS(オペレーティングシステム)などが実際の処理の一部または全部を行い、その処理によって前述した実施形態の機能が実現される場合も含まれることは言うまでもない。
【0043】
さらに、記憶媒体から読出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書込まれた後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPUなどが実際の処理の一部または全部を行い、その処理によって前述した実施形態の機能が実現される場合も含まれることは言うまでもない。
【0044】
また、本実施形態では、有料道路の通行料金算出のための道路データとして記憶部13に記憶されているデータを用いているが、無線通信等の通信手段によって外部機関より得られたデータを用いて道路データの取得を行っても良い。
【0045】
また、本実施形態では、有料道路に進入した時点で本処理を開始しているが、有料道路以外の特定の道路(例えばトンネル、自動車専用道路等)において本発明の道路情報表示方法が用いられたとしても、同様の効果を発揮することは言うまでもない。また、有料道路から外れた際の進入先として、SAおよびPA以外の区画に自車が進入したとしても、本発明の道路情報表示方法を用いることができることは言うまでもない。
【0046】
また、本実施形態では、有料道路からSA或いはPAへの進入、およびSA或いはPAの離脱を検知する方法として、進行方向、或いは走行速度による検知方法を用いているが、上記以外の検知方法を用いてSA或いはPAへの進入および離脱を検知する方法を用いた場合においても、本発明と同様の効果が得られることは言うまでもない。
【図面の簡単な説明】
【0047】
【図1】本発明のナビゲーション装置による道路情報表示処理の処理フロー図である。
【図2】本発明のナビゲーション装置内部の要部構成を示したブロック図である。
【符号の説明】
【0048】
1 ナビゲーション装置
11 制御部
12 メモリ
13 記憶部
14 ROM
15 現在位置検出部
16 操作ボタン群
17 表示部
【技術分野】
【0001】
本発明は、車載用のナビゲーション装置に関するものであり、特にナビゲーション装置が備える道路情報表示方法に関する。
【背景技術】
【0002】
近年、車載用のナビゲーション装置には多くの機能が設けられる傾向がある。特にユーザーにとって有用な機能としては、出発地から目的地までの経路を自動的に検索し、検索された経路を誘導経路として地図上に表示する経路検索機能が存在する。この機能を用いれば、出発地と目的地とを入力装置から入力することにより、出発地と目的地とを最適ルートで結ぶ誘導経路を自動的に検索し、LCD(液晶表示装置)等の表示装置に表示することが可能である。
【0003】
また、検索された誘導経路に従ってユーザーが走行を行う際に、誘導経路を地図上に表示し、併せて自車位置を表示することにより、ユーザーを目的地まで案内する誘導機能が存在する。この機能を用いれば、例えば走行中に交差点に近付いた際に、その交差点の拡大図(表示装置の所定の表示範囲内に表示される地図を、その表示要素数を減少させてデフォルメした図)を表示する等、走行中の経路に関する様々な情報をリアルタイムでユーザーに対して通知することが可能である。
【0004】
また、検索された誘導経路上に有料道路(高速道路等)が存在する場合において、有料道路の通行料金の決済をスムーズに行う為に、車両に設置した車載器と料金所に設けられた路側アンテナとの間で情報の送受信を行うことによりノンストップで料金決済を行うETC(Electronic Toll Collection System)と呼ばれる自動料金支払いシステムが存在する。ETCは、料金所等の決済場所に設けられた路側アンテナと、車両に設置された車載器との間で近距離無線通信を行うことにより、各種情報(車両ナンバー、通過時刻等)の送受信を行い、通行料金の決済を行うシステムである。
【0005】
上記のETC(自動料金支払いシステム)に於いて、車両に設置した車載器に専用のクレジットカード(通称、ETCカード)を挿入することで、車両が路側アンテナに接近すると自動的に近距離無線通信による通信を開始し、通行料金等の決済を行うことができる。そして、利用者が車両から降車する際には、ETCカードの盗難を防ぐ為に、車載器からETCカードを抜き取り保管することとなる。
【0006】
上記のような誘導経路表示機能を備えた従来のナビゲーション装置においては、自車位置の検出のために、例えば地磁気センサ、ジャイロスコープ、車速センサ、および衛星からの電波に基づいて車両の位置を検出するGPS(Global Positioning System)のためのGPS受信機等が用いられる。しかしながらGPSを用いた従来のナビゲーション装置では、自車位置は道路情報(道路を数値データとして表した処理用の情報)のノードやリンクの位置に完全に一致するように表示されるが、その上に市街地図を重ねて表示した場合、市街地図の道路や交差点上に自車位置が正確に表示される保証がないという問題があった。
【0007】
市街地図は、道路や建物等の輪郭を表した線分の集合にすぎない。このため、ナビゲーション装置は、市街地図においてどれが道路でどれが交差点であるかは認識していない。このため、道路情報に市街地図を重ねて表示した場合、単に緯度及び経度を一致させて重ね合わせることしかできず、市街地図の道路や交差点と、道路情報のリンクやノードとを一致させて重ねることができない。そのため、市街地図の道路や交差点と、道路情報の道路や交差点とが、位置的にずれて認識される可能性がある。結果として、自車位置が市街地図の道路や交差点からずれた位置、例えば道路外の建物内部などに表示されるケースが生じるという問題があった。
【0008】
上記の問題に関連して特許文献1においては、測定した現在位置、或いは探索した経路等を確実に市街地図の道路上に表示することを目的とした地図表示技術が開示されている。特許文献1の地図表示技術は、道路や建物の外枠形状が描かれた市街地図を表す市街地図データと、市街地図の道路及び交差点部分をポリゴンで表した道路ポリゴンデータとを読み出す地図データ読出し手段と、ユーザの現在位置を推定する位置推定手段とを備えている。また、推定した現在位置を道路ポリゴンの領域に入るように修正する自車位置調整手段と、市街地図データに基づいて市街地図画像を作成し、修正した現在位置を市街地図画像上に重ねて表示する現在位置表示手段を備えている。
【0009】
上記の特許文献1の発明によれば、ユーザー(例えば自動車)の推定現在位置を、市街地図の複雑な道路形状に精度良く一致した道路ポリゴンデータに対して位置調整する。従って、例外的な状況(自動車が広い駐車場に入る等)を除いて、常に市街地図の道路上に精度良くユーザの現在位置を表示することができる。
【0010】
しかしながら上記の特許文献1の地図表示技術においては、自車(ユーザー)が道路上に存在する場合は現在位置を高精度に表示することができるが、自車が道路から離れた場所(例えばサービスエリアやパーキングエリア等)に進入した場合、自車位置調整が行われず、従来と同様に自車位置が市街地図上の施設(サービスエリア等)からずれた位置に表示されてしまうという問題があった。また、仮に自車位置調整を行ったとしても、自車が道路外(サービスエリア等)に位置するにも関わらず、自車位置が道路上に補正されるため、実際の現在位置とズレが生じてしまうという問題があった。
【特許文献1】特開2001−41754号公報
【発明の開示】
【発明が解決しようとする課題】
【0011】
本発明は、上記の問題を解決するためになされたものであって、その目的は、自車が道路外に存在する場合であっても、測定した現在位置、或いは探索した経路等を確実に市街地図上の正確な場所に表示することが可能であるナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0012】
上記目的を達成するために本発明のナビゲーション装置は、
自車の現在位置を検出する自車位置検出手段と、
道路及び建築物の外枠形状を含んだ市街地図データを記憶する市街地図データ記憶手段と、
道路形状データをもとに道路及び建築物をポリゴン表示するポリゴン表示手段と、
前記自車位置検出手段により検出された自車位置周辺を前記ポリゴン表示手段を用いて表示する際に、道路を示すポリゴン上に前記自車位置が位置するように調整する自車位置調整手段と、
前記自車位置調整手段を用いて調整された自車位置の周辺を前記ポリゴン表示手段により表示するとともに、前記市街地図データを用いて作成された市街地図画像を重ねて表示する現在位置表示手段と、
を備えたナビゲーション装置において、
自車が特定走行路を走行中に、前記特定走行路より離脱したことを検知する離脱検知手段と、
前記離脱検知手段により離脱が検知された場合に、離脱先の建築物を示すポリゴン上に前記自車位置が位置するように調整し、調整した前記自車位置を前記市街地図画像上に重ねて表示する走行路外位置表示手段と、
を備えたことを特徴としている。
【0013】
この構成によると、
自車が特定の走行路(例えば有料道路等)を走行中に走行路を離脱したことをナビゲーション装置の制御部が検知すると、離脱先周辺の建築物(例えばサービスエリア等)をポリゴンデータおよび道路地図データを用いてを表示するとともに、自車の現在位置を取得する。取得された現在位置が、道路地図データ上において、離脱先の建築物の範囲内に含まれているかどうかを確認し、含まれていない場合、離脱先建築物を示すポリゴン表示および市街地図画像内に、自車の現在位置が含まれるように自車位置の調整を行う。
また、上記目的を達成するために本発明のナビゲーション装置は、
自車が前記離脱先建築物より前記特定走行路へ復帰したことを検知する復帰検知手段と、
前記復帰検知手段により特定走行路への復帰が検知された場合に、自車位置を表示する手段を前記走行路外位置表示手段から前記現在位置表示手段に切り替える切り替え手段と、
を備えたことを特徴としている。
【0014】
この構成によると、
自車が特定の走行路から離脱し、かつ離脱先から前記走行路に再び復帰したことをナビゲーション装置の制御部が検知すると、自車位置を表示する手段を本発明の走行路外位置表示手段から、従来の現在位置表示手段に切り替える。これにより、自車の現在位置を取得するとともに、取得された自車位置を従来の自車位置調整機能を用いて位置補正を行い、走行路上に自車位置を表示する。
【0015】
また、上記目的を達成するために本発明のナビゲーション装置は、
前記離脱検知手段において、予め自車の進行方向を記憶しておき、進行方向が一定時間内に一定角度以上変化したことを検知することにより、前記特定走行路から離脱したと判断することと、
前記復帰検知手段において、予め記憶された前記進行方向へ一定距離を走行したことを検知することにより、前記特定走行路への復帰が行われたと判断することと、
を備えたことを特徴としている。
【0016】
この構成によると、
自車両が特定走行路(有料道路等)を走行中に予め進行方向を記憶しておき、進行方向が急激に変化した(例えばサービスエリアに入るために90度の左折を行った)ことをきっかけに、自車が特定走行路から離脱したと判断する。また逆に、記憶された前記進行方向へ一定距離を走行したことを検知することにより、サービスエリア等を離脱し、もとの特定走行路へ復帰したことを判断する。
【0017】
また、上記目的を達成するために本発明のナビゲーション装置は、
前記特定走行路が有料道路に該当すること
を特徴としている。
【0018】
この構成によると、
有料道路を走行中に有料道路を離脱した場合、あるいは離脱先(サービスエリア等)から有料道路へ復帰した場合に、本発明の道路情報表示方法が用いられる。
【発明の効果】
【0019】
本発明の第一の構成によれば、
自車が特定の走行路から離脱した際に、離脱先周辺の建築物(例えばサービスエリア等)をポリゴンデータおよび道路地図データを用いてを表示する場合に、自車位置を離脱先建築物の領域内に含まれるように調整して表示する。これにより、自車が走行路から離脱した場合において、実際の現在位置と、ポリゴン表示および市街地図画像により示される自車位置との間にズレが生じることがない。走行路上にいる場合と同様に、所定の領域内(例えばサービスエリア内等)に正確に自車位置を表示することが可能となる。
【0020】
本発明の第二の構成によれば、
自車が特定の走行路から離脱し、かつ離脱先から前記走行路に再び復帰したことをナビゲーション装置の制御部が検知すると、自車位置を表示する手段を本発明の走行路外位置表示手段から、従来の現在位置表示手段に切り替える。このため、自車が走行路外から走行路に復帰した場合においても自車位置の調整が行われるため、引き続き正確な位置情報を表示することが可能である。
【0021】
本発明の第三の構成によれば、
自車両が特定走行路を走行中に予め進行方向を記憶しておき、進行方向が急激に変化したことをきっかけに、自車が特定走行路から離脱したと判断する。また逆に、記憶された前記進行方向へ一定距離を走行したことを検知することにより、サービスエリア等を離脱し、もとの特定走行路へ復帰したことを判断する。このため、自車の走行路外への離脱及び走行路への復帰を確実かつ容易に検知することが可能である。
【0022】
本発明の第四の構成によれば、
有料道路を走行中に有料道路を離脱した場合、あるいは離脱先から有料道路へ復帰した場合に、本発明の道路情報表示方法が用いられる。このため、一般道路のように比較的頻繁に走行路外へ離脱することが想定される道路においては本発明の道路情報表示方法は機能せず、比較的走行路外へ離脱することが少ない有料道路においてのみ本発明の道路情報表示方法が機能するため、誤作動を防止することが可能である。
【発明を実施するための最良の形態】
【0023】
本発明の実施の一形態について、図面に基づいて説明すれば、以下の通りである。
[実施の形態]
〈1.ナビゲーション装置の内部構成について〉
ここで、本発明の第一の実施形態におけるナビゲーション装置1の電気回路システムの要部構成を、図2のブロック図を用いながら説明する。
【0024】
図2のブロック図に示すように、本発明のナビゲーション装置1は、少なくとも、制御部11、メモリ12、記憶部13、ROM14、現在位置検出部15、操作ボタン群16、および表示部17を含むように構成されている。
【0025】
制御部11は、ナビゲーション装置1の各部材の駆動を有機的に制御することによりナビゲーション処理(経路の検索、道路データの表示等)を統括制御するための中央処理装置である。また制御部11は、各装置(例えば記憶部13等)の制御やデータの計算、加工処理等を行なう中枢部分となっている。また制御部11は、マップマッチング(自車位置調整)処理部11aを含むように構成されている。マップマッチング処理部11aは、後述する現在位置検出部15により検出された現在位置と、道路地図データとの間のマップマッチングを行なう処理回路である。マップマッチング処理部11aは、現在位置検出部15からGPS位置データを受けると共に、自車の最近の速度、進行方向、軌跡等から現在の自車位置を推定し、経路情報等の表示処理の際に、地図上の自車位置が必ず道路上に位置するように補正する(推定位置が道路外であっても、強制的に近傍の道路上に修正する)機能を備えている。
【0026】
メモリ12は、ナビゲーション装置1が保持する各種データを一時的に記憶する媒体であり、例えば書込可能なRAM(Random Access Memory)等により構成されている。メモリ12は、例えば制御部11によって各種ナビゲーション処理が行われる際の処理データや、ユーザーから受けた指示命令等を一時的に記憶しておくためのバッファメモリとしての役割を持つ。
【0027】
記憶部13は、ナビゲーション装置1が保持する各種データ(道路データ、録音データ等)を記録するための記憶媒体である。なお、記憶部13は、複数の領域(パーティション)に物理的に分割されており、記憶するデータの種別に応じて領域別に記憶することがより望ましい。記憶部13は少なくとも、ポリゴンデータ(道路等の構成形状を立体的に示すためのデータ)を記憶する領域であるポリゴンデータ記憶領域13aと、道路地図データを記録する領域である道路地図データ記憶領域13bとを含むように構成されている。
【0028】
ROM(Read Only Memory)14は、例えば制御部11を用いた各種処理(例えば経路検索処理等)を行うためのプログラムデータを記憶するための媒体であり、ユーザーは情報の読み出しのみが可能となっている。
【0029】
現在位置検出部15は、ナビゲーション装置(ひいてはナビゲーション装置を搭載している車両)の現在位置を特定するための回路である。現在位置検出部15は、例えば地磁気センサ、ジャイロスコープ、車速センサ、および衛星からの電波に基づいて車両の位置を検出するGPS(Global Positioning System)のためのGPS受信機等からの情報を受信する。これらの装置により取得された情報をもとに、現在位置検出部15は車両の現在位置を特定する。
【0030】
操作ボタン群16は、ユーザーが道路検索の指示や道路情報の表示指示等をナビゲーション装置1に対して行なうための入力インターフェースである。表示部17は、ナビゲーション装置1の各種情報をユーザーに対して表示するための出力インタフェースである。
〈2.道路情報表示工程について〉
ここで、本発明のナビゲーション装置1における道路情報表示処理の処理工程を、図1のフロー図と、図2のブロック図とを用いながら説明する。
【0031】
図1に示すように、例えば制御部11がユーザーによる有料道路(特定走行路)の走行開始を検知することにより、本発明の道路情報表示処理が開始される(S110)。なお、有料道路の走行検知は、例えば現在位置検知部15と記憶部13に記憶されている道路地図データとを用いて、走行経路を常時監視すること等により行われる。
【0032】
有料道路の走行を検知した制御部11は、経路情報を元に、進行方向にサービスエリア(以後SAと省略して記述する)或いはパーキングエリア(以後PAと省略して記述する)が存在するかどうかのチェックを行う(S120)。PA或いはSAが存在する場合は、次のS130の処理に移行する。PA或いはSAが存在しない場合は、引き続きPAおよびSAの監視を継続する。
【0033】
前記S120において経路上にPA或いはSAを検知した制御部11は、記憶部13のポリゴンデータ記憶領域13aに記憶されているポリゴンデータ(道路形状データ)を読み出し、読み出したデータをもとに自車周辺経路のポリゴン画像を作成し、表示部17を用いて表示する(S130)。
【0034】
制御部11は、前記S120において検知されたPA或いはSAに、自車が進入したかどうかのチェックを行う(S140)。自車が進入している場合は、次のS150の処理に進む。進入していない場合は、前記S120の処理に移行し、引き続きPAまたはSAの監視を行う。なお、自車がPAまたはSAへ進入したかどうかのチェック方法としては、例えば予め自車の進行方向を記憶しておき、進行方向が急激に変化(例えば進行方向が90度以上変化)した場合に、有料道路を外れてPAまたはSAに進入したと判断する方法が考えられる。また例えば、速度が急激に変化した(例えば時速20Kmを下回った)場合に、PAまたはSAに進入したと判断する方法であってもよい。
【0035】
前記S140において、自車がPA或いはSAに進入したと判断された場合、S130の処理において表示部17に表示されているポリゴン画像に対して、自車位置がPA或いはSA上に表示されるように、ポリゴン画像に対して補正を行う(S150)。例えば自車が道路から外れた場合、従来技術による位置補正機能(マップマッチング機能)が無効となるため、自車位置はGPSにより得られた大まかな位置情報をもとに表示されることとなる。GPSによる位置の特定は誤差が大きいため、得られた位置情報がPA或いはSA上ではなく、例えば平野や森林を指し示してしまう場合がある。このような場合においても、前記S140において自車がPA或いはSAに進入していることが明確となっているため、ポリゴン画像上の自車位置をPA或いはSA内に強制的に移動させ、表示部17を用いて表示する。
【0036】
自車がPA或いはSAに進入した後、制御部11は、自車がPA或いはSAを離脱したかどうかを一定周期で確認する(S160)。確認の結果、自車がPA或いはSAから離脱したと判断された場合は、次のS170の処理に移行する。逆に、依然として自車がPA或いはSAに存在していると判断された場合、前記S150の処理に移行する。なお、自車がPA或いはSAから離脱したかどうかの確認方法としては、例えばPA或いはSAに進入する直前における高速道路上の進行方向を記憶しておき、記憶しておいた進行方向と同一方向に一定距離を走行した場合にPA或いはSAを離脱したと判断する方法がある。また例えば、自車の速度が一定速度(例えば時速20km)を越えた場合に、PA或いはSAを離脱したと判断する方法であってもよい。
【0037】
前記S160において、自車がPA或いはSAを離脱したと判断された場合、制御部11は自車位置を有料道路内へ移動させ、有料道路上での位置補正処理を行う。なお、有料道路上での位置補正処理については従来技術と同様であるため、ここでは説明を省略する。
【0038】
制御部11は、例えば現在位置検知部15と、路地図データ記憶領域13bに記憶されている道路地図データとを用いて、自車が有料道路上を走行中であるかどうかの確認を行う(S180)。有料道路上を走行中である場合、前記S120の処理に移行する。逆に、有料道路からの離脱が検知された場合、本処理を終了する。
[その他の実施の形態]
以上、好ましい実施の形態及び実施例をあげて本発明を説明したが、本発明は必ずしも上記実施の形態及び実施例に限定されるものではなく、その技術的思想の範囲内において様々に変形して実施することができる。
【0039】
例えば前述した実施形態の機能を実現するソフトウェアのプログラムコードを記録した記憶媒体を、ナビゲーション装置1に供給し、そのナビゲーション装置1内のコンピュータ(例えばCPU)が記憶媒体に格納されたプログラムコードを読出し実行することによっても、達成されることは言うまでもない。
【0040】
この場合、記憶媒体から読出されたプログラムコード自体が、前述した実施形態の機能を実現することになり、そのプログラムコードを記憶した記憶媒体は本発明を構成することになる。
【0041】
なお、プログラムコードを供給するための記憶媒体としては、例えば、フロッピディスク、ハードディスク、光ディスク、光磁気ディスク、CD−ROM、CD−R、磁気テープ、不揮発性のメモリカード、ROMなどを用いることができる。
【0042】
また、コンピュータが読出したプログラムコードを実行することにより、前述した実施形態の機能が実現されるだけでなく、そのプログラムコードの指示に基づき、コンピュータ上で稼働しているOS(オペレーティングシステム)などが実際の処理の一部または全部を行い、その処理によって前述した実施形態の機能が実現される場合も含まれることは言うまでもない。
【0043】
さらに、記憶媒体から読出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書込まれた後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPUなどが実際の処理の一部または全部を行い、その処理によって前述した実施形態の機能が実現される場合も含まれることは言うまでもない。
【0044】
また、本実施形態では、有料道路の通行料金算出のための道路データとして記憶部13に記憶されているデータを用いているが、無線通信等の通信手段によって外部機関より得られたデータを用いて道路データの取得を行っても良い。
【0045】
また、本実施形態では、有料道路に進入した時点で本処理を開始しているが、有料道路以外の特定の道路(例えばトンネル、自動車専用道路等)において本発明の道路情報表示方法が用いられたとしても、同様の効果を発揮することは言うまでもない。また、有料道路から外れた際の進入先として、SAおよびPA以外の区画に自車が進入したとしても、本発明の道路情報表示方法を用いることができることは言うまでもない。
【0046】
また、本実施形態では、有料道路からSA或いはPAへの進入、およびSA或いはPAの離脱を検知する方法として、進行方向、或いは走行速度による検知方法を用いているが、上記以外の検知方法を用いてSA或いはPAへの進入および離脱を検知する方法を用いた場合においても、本発明と同様の効果が得られることは言うまでもない。
【図面の簡単な説明】
【0047】
【図1】本発明のナビゲーション装置による道路情報表示処理の処理フロー図である。
【図2】本発明のナビゲーション装置内部の要部構成を示したブロック図である。
【符号の説明】
【0048】
1 ナビゲーション装置
11 制御部
12 メモリ
13 記憶部
14 ROM
15 現在位置検出部
16 操作ボタン群
17 表示部
【特許請求の範囲】
【請求項1】
自車の現在位置を検出する自車位置検出手段と、
道路及び建築物の外枠形状を含んだ市街地図データを記憶する市街地図データ記憶手段と、
道路形状データをもとに道路及び建築物をポリゴン表示するポリゴン表示手段と、
前記自車位置検出手段により検出された自車位置周辺を前記ポリゴン表示手段を用いて表示する際に、道路を示すポリゴン上に前記自車位置が位置するように調整する自車位置調整手段と、
前記自車位置調整手段を用いて調整された自車位置の周辺を前記ポリゴン表示手段により表示するとともに、前記市街地図データを用いて作成された市街地図画像を重ねて表示する現在位置表示手段と、
を備えたナビゲーション装置において、
自車が特定走行路を走行中に、前記特定走行路より離脱したことを検知する離脱検知手段と、
前記離脱検知手段により離脱が検知された場合に、離脱先の建築物を示すポリゴン上に前記自車位置が位置するように調整し、調整した前記自車位置を前記市街地図画像上に重ねて表示する走行路外位置表示手段と、
を備えたことを特徴とするナビゲーション装置。
【請求項2】
自車が前記離脱先建築物より前記特定走行路へ復帰したことを検知する復帰検知手段と、
前記復帰検知手段により特定走行路への復帰が検知された場合に、自車位置を表示する手段を前記走行路外位置表示手段から前記現在位置表示手段に切り替える切り替え手段と、
を備えたことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記離脱検知手段において、予め自車の進行方向を記憶しておき、進行方向が一定時間内に一定角度以上変化したことを検知することにより、前記特定走行路から離脱したと判断することと、
前記復帰検知手段において、予め記憶された前記進行方向へ一定距離を走行したことを検知することにより、前記特定走行路への復帰が行われたと判断することと、
を特徴とする請求項1または請求項2に記載のナビゲーション装置。
【請求項4】
前記特定走行路が有料道路に該当すること
を特徴とする請求項1乃至請求項3のいずれかに記載のナビゲーション装置。
【請求項5】
自車の現在位置を検出する自車位置検出工程と、
道路及び建築物の外枠形状を含んだ市街地図データを記憶する市街地図データ記憶工程と、
道路形状データをもとに道路及び建築物をポリゴン表示するポリゴン表示工程と、
前記自車位置検出工程により検出された自車位置周辺を前記ポリゴン表示工程を用いて表示する際に、道路を示すポリゴン上に前記自車位置が位置するように調整する自車位置調整工程と、
前記自車位置調整工程により調整された自車位置の周辺を前記ポリゴン表示工程により表示するとともに、前記市街地図データを用いて作成された市街地図画像を重ねて表示する現在位置表示工程と、
を有する道路情報表示方法において、
自車が特定走行路を走行中に、前記特定走行路より離脱したことを検知する離脱検知工程と、
前記離脱検知工程により離脱が検知された場合に、離脱先の建築物を示すポリゴン上に前記自車位置が位置するように調整し、調整した前記自車位置を前記市街地図画像上に重ねて表示する走行路外位置表示工程と、
を有することを特徴とする道路情報表示方法。
【請求項6】
自車が前記離脱先建築物より前記特定走行路へ復帰したことを検知する復帰検知工程と、
前記復帰検知工程により特定走行路への復帰が検知された場合に、自車位置を表示する工程を前記走行路外位置表示工程から前記現在位置表示工程に切り替える切り替え工程と、
を有することを特徴とする請求項5に記載の道路情報表示方法。
【請求項7】
前記離脱検知工程において、予め自車の進行方向を記憶しておき、進行方向が一定時間内に一定角度以上変化したことを検知することにより、前記特定走行路から離脱したと判断することと、
前記復帰検知工程において、予め記憶された前記進行方向へ一定距離を走行したことを検知することにより、前記特定走行路への復帰が行われたと判断することと、
を特徴とする請求項5または請求項6に記載の道路情報表示方法。
【請求項8】
前記特定走行路が有料道路に該当すること
を特徴とする請求項5乃至請求項7のいずれかに記載の道路情報表示方法。
【請求項1】
自車の現在位置を検出する自車位置検出手段と、
道路及び建築物の外枠形状を含んだ市街地図データを記憶する市街地図データ記憶手段と、
道路形状データをもとに道路及び建築物をポリゴン表示するポリゴン表示手段と、
前記自車位置検出手段により検出された自車位置周辺を前記ポリゴン表示手段を用いて表示する際に、道路を示すポリゴン上に前記自車位置が位置するように調整する自車位置調整手段と、
前記自車位置調整手段を用いて調整された自車位置の周辺を前記ポリゴン表示手段により表示するとともに、前記市街地図データを用いて作成された市街地図画像を重ねて表示する現在位置表示手段と、
を備えたナビゲーション装置において、
自車が特定走行路を走行中に、前記特定走行路より離脱したことを検知する離脱検知手段と、
前記離脱検知手段により離脱が検知された場合に、離脱先の建築物を示すポリゴン上に前記自車位置が位置するように調整し、調整した前記自車位置を前記市街地図画像上に重ねて表示する走行路外位置表示手段と、
を備えたことを特徴とするナビゲーション装置。
【請求項2】
自車が前記離脱先建築物より前記特定走行路へ復帰したことを検知する復帰検知手段と、
前記復帰検知手段により特定走行路への復帰が検知された場合に、自車位置を表示する手段を前記走行路外位置表示手段から前記現在位置表示手段に切り替える切り替え手段と、
を備えたことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記離脱検知手段において、予め自車の進行方向を記憶しておき、進行方向が一定時間内に一定角度以上変化したことを検知することにより、前記特定走行路から離脱したと判断することと、
前記復帰検知手段において、予め記憶された前記進行方向へ一定距離を走行したことを検知することにより、前記特定走行路への復帰が行われたと判断することと、
を特徴とする請求項1または請求項2に記載のナビゲーション装置。
【請求項4】
前記特定走行路が有料道路に該当すること
を特徴とする請求項1乃至請求項3のいずれかに記載のナビゲーション装置。
【請求項5】
自車の現在位置を検出する自車位置検出工程と、
道路及び建築物の外枠形状を含んだ市街地図データを記憶する市街地図データ記憶工程と、
道路形状データをもとに道路及び建築物をポリゴン表示するポリゴン表示工程と、
前記自車位置検出工程により検出された自車位置周辺を前記ポリゴン表示工程を用いて表示する際に、道路を示すポリゴン上に前記自車位置が位置するように調整する自車位置調整工程と、
前記自車位置調整工程により調整された自車位置の周辺を前記ポリゴン表示工程により表示するとともに、前記市街地図データを用いて作成された市街地図画像を重ねて表示する現在位置表示工程と、
を有する道路情報表示方法において、
自車が特定走行路を走行中に、前記特定走行路より離脱したことを検知する離脱検知工程と、
前記離脱検知工程により離脱が検知された場合に、離脱先の建築物を示すポリゴン上に前記自車位置が位置するように調整し、調整した前記自車位置を前記市街地図画像上に重ねて表示する走行路外位置表示工程と、
を有することを特徴とする道路情報表示方法。
【請求項6】
自車が前記離脱先建築物より前記特定走行路へ復帰したことを検知する復帰検知工程と、
前記復帰検知工程により特定走行路への復帰が検知された場合に、自車位置を表示する工程を前記走行路外位置表示工程から前記現在位置表示工程に切り替える切り替え工程と、
を有することを特徴とする請求項5に記載の道路情報表示方法。
【請求項7】
前記離脱検知工程において、予め自車の進行方向を記憶しておき、進行方向が一定時間内に一定角度以上変化したことを検知することにより、前記特定走行路から離脱したと判断することと、
前記復帰検知工程において、予め記憶された前記進行方向へ一定距離を走行したことを検知することにより、前記特定走行路への復帰が行われたと判断することと、
を特徴とする請求項5または請求項6に記載の道路情報表示方法。
【請求項8】
前記特定走行路が有料道路に該当すること
を特徴とする請求項5乃至請求項7のいずれかに記載の道路情報表示方法。
【図1】


【図2】
【図2】
【公開番号】特開2007−93455(P2007−93455A)
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願番号】特願2005−284670(P2005−284670)
【出願日】平成17年9月29日(2005.9.29)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)鳥取三洋電機株式会社 (1,582)
【Fターム(参考)】
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願日】平成17年9月29日(2005.9.29)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)鳥取三洋電機株式会社 (1,582)
【Fターム(参考)】
[ Back to top ]