
ナビゲーション装置、方法及びプログラム
【課題】与えられる立ち寄り先を経て出発地すなわち現在地等へ戻るルートを探索及びガイドするナビゲーション装置、方法及びプログラムを提供する。
【解決手段】目的地等指定部41において、目的地並びに立ち寄り先を指定する。経路設定部42は、指定された立ち寄り先を経て指定された目的地へ至る経路について、道路地図データに基く経路の探索及び設定を行う。目的地に到着したかの判定は、自車が出発地から所定距離走行するまでは行なわない。制御部47は、目的地到着判定部46が自車が目的地に到着したと判定した際に、案内部44による前記経路案内を終了させる。
【解決手段】目的地等指定部41において、目的地並びに立ち寄り先を指定する。経路設定部42は、指定された立ち寄り先を経て指定された目的地へ至る経路について、道路地図データに基く経路の探索及び設定を行う。目的地に到着したかの判定は、自車が出発地から所定距離走行するまでは行なわない。制御部47は、目的地到着判定部46が自車が目的地に到着したと判定した際に、案内部44による前記経路案内を終了させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、与えられる立ち寄り先を経て出発地すなわち現在地等へ戻るルートを探索及びガイドするナビゲーション装置、方法及びプログラムに関するものである。
【背景技術】
【0002】
近年、自動車の普及と情報処理技術の進展に伴い、ナビゲーション装置に関する技術が急速に進歩しつつある。ナビゲーション装置は、自動車等の移動体に関する経路誘導(単に「誘導」や「ガイド」、「ルートガイド」などとも呼ぶ)を行うもので、道路のネットワーク構造や周辺施設等を表す道路地図データを予め用意し、指定された目的地までの最適な経路(ルートとも呼ぶ)を前記データに基いて計算して誘導経路として設定(ルート設定とも呼ぶ)し、GPS等によりリアルタイムに判断する自車位置とその周辺地図を画面表示しながら、右左折などの誘導案内を合成音声や画面表示で出力するものである。
【0003】
上記のような従来技術で目的地を指定するには、例えば、画面表示中の地図をスクロールさせてカーソルで指定したり、店舗等の施設を住所・名称・電話番号・名称等で絞込み検索した候補から指定する。また、このように指定された目的地の所定距離以内まで自車位置が接近すると、それをもって目的地到着判定が行われ、目的地に到着したことを音声や画面表示でユーザに伝え、ルートガイドを終了する。
【0004】
すなわち、このように目的地が近い場合は、ルート設定をしてもすぐにルートガイドが終了することになって実益が乏しいため、従来では、ルート探索する際に画面表示によりその旨のメッセージを出した上で、ルート探索自体を行わないようにしていた。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−074486号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、実際の自動車利用の場面では、現在地からある程度離れた立ち寄り先にいったん立ち寄り、そのうえで再度、現在地やその近くに戻りたい場合も考えられる。しかしながら、このように指定された目的地が現在地から所定以内の近距離の場合や、例えば現在地と同一地点の場合、上記のように従来技術では、目的地到着判定により目的地に到着した事を音声または画面表示によりユーザに伝え、ルートガイド終了となってしまう。
【0007】
このため、従来技術では、立ち寄り先に基いたナビゲーションの利用が困難という問題があった。特に、どうしてもどこかに寄り道をしてまた現在地に戻りたい場合、まず立ち寄り先を目的地にしていったんルート探索をさせてルートガイドを利用し、その後で、その立ち寄り先から戻りたい位置を目的地にして再度ルート探索を行わねばならず、その操作も煩雑であった。
【0008】
本発明は、上記のような従来技術の問題点を解決するために提案されたもので、その目的は、与えられる立ち寄り先を経て出発地すなわち現在地等へ戻るルートを探索及びガイドするナビゲーション装置、方法及びプログラムを提供することである。
【課題を解決するための手段】
【0009】
上記の目的を達成するため、請求項1のナビゲーション装置は、目的地及び経由地を設定する手段と、車両の現在地を検出する手段と、出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定手段と、前記経路設定手段により設定された経路に基づき目的地までの経路案内を行う手段と、前記目的地が前記車両の現在地近傍に設定されている場合に、前記経路案内が行なわれないことを回避する手段と、を備えたことを特徴とする。
【0010】
請求項4のナビゲーション方法は、請求項1の発明を方法という見方からとらえたもので、コンピュータが、目的地及び経由地を設定する処理と、車両の現在地を検出する処理と、出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定処理と、前記経路設定処理により設定された経路に基づき目的地までの経路案内を行う処理と、前記目的地が前記車両の現在地近傍に設定されている場合に、前記経路案内が行なわれないことを回避する処理と、を実行することを特徴とする。
【0011】
請求項7のナビゲーションプログラムは、請求項1,4の発明をコンピュータプログラムという見方から捉えたもので、コンピュータに、目的地及び経由地を設定する機能と、車両の現在地を検出する機能と、出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定機能と、前記経路設定機能により設定された経路に基づき目的地までの経路案内を行う機能と、前記目的地が前記車両の現在地近傍に設定されている場合に、前記経路案内が行なわれないことを回避する機能と、を実現させることを特徴とする。
【0012】
これらの態様では、現在地から立ち寄り先を経由し、ふたたび現在地やその付近に戻るルートについて探索、案内を適切に受けられ、経路探索が行われなかったり、経路案内が開始後直ちに終了するなどの不都合が回避されるので、立ち寄り先から戻るルートを改めて別途探索するなどの手間を省きユーザの負担を軽減することができる。
【0013】
請求項2の発明は、請求項1記載のナビゲーション装置において、前記経路案内が行なわれないことを回避する手段は、前記車両が前記出発地から所定距離移動するまで機能することを特徴とする。
【0014】
請求項5の発明は、請求項4記載のナビゲーション方法において、前記経路案内が行なわれないことを回避する処理は、前記車両が前記出発地から所定距離移動するまで実行されることを特徴とする。
【0015】
請求項8の発明は、請求項7記載のナビゲーションプログラムにおいて、前記経路案内が行なわれないことを回避する機能は、前記車両が前記出発地から所定距離移動するまで実行される機能であることを特徴とする。
【0016】
これらの態様では、出発地から所定距離走行するまでは、経路案内の終了を禁止するので、立ち寄り先を通過したかを判定しなくても、経路探索が行われなかったり、経路案内が開始後直ちに終了するなどの不都合が回避され、立ち寄り先の前と後を分けて経路探索するといったユーザの操作回数を減らし、負担を軽減することができる。
【0017】
請求項3のナビゲーション装置は、目的地及び経由地を設定する手段と、車両の現在地を検出する手段と、出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定手段と、前記経路設定手段により設定された経路に基づき目的地までの経路案内を行う手段と、前記車両が前記目的地に到着したことを判定する判定手段と、前記判定手段により前記車両が目的地に到着したと判定された場合に、前記経路案内を終了させる手段と、を備え、前記判定手段は、前記車両が前記出発地から所定距離移動するまでは、前記経路案内の終了を禁止することを特徴とする。
【0018】
請求項6のナビゲーション方法は、請求項3の発明を方法という見方から捉えたもので、コンピュータが、目的地及び経由地を設定する処理と、車両の現在地を検出する処理と、出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定処理と、前記経路設定処理により設定された経路に基づき目的地までの経路案内を行う処理と、前記車両が前記目的地に到着したことを判定する処理と、前記判定処理により前記車両が目的地に到着したと判定された場合に、前記経路案内を終了させる処理と、を実行するものであって、前記判定処理は、前記車両が前記出発地から所定距離移動するまでは、前記経路案内の終了を禁止することを特徴とする。
【0019】
請求項9のナビゲーションプログラムは、コンピュータに、目的地及び経由地を設定する機能と、車両の現在地を検出する機能と、出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定機能と、前記経路設定機能により設定された経路に基づき目的地までの経路案内を行う機能と、前記車両が前記目的地に到着したことを判定する機能と、前記判定機能により前記車両が目的地に到着したと判定された場合に、前記経路案内を終了させる機能と、を実現させるものであって、前記判定機能は、前記車両が前記出発地から所定距離移動するまでは、前記経路案内の終了を禁止する機能であることを特徴とする。
【0020】
これらの態様では、出発地から所定距離走行するまでは、前記経路案内の終了を禁止するので、立ち寄り先を通過したかを判定しなくても、経路探索が行われなかったり、経路案内が開始後直ちに終了するなどの不都合が回避され、立ち寄り先の前と後を分けて経路探索するといったユーザの操作回数を減らし、負担を軽減することができる。
【発明の効果】
【0021】
以上のように、この発明によれば、与えられる立ち寄り先を経て出発地すなわち現在地等へ戻るルートを探索及びガイドするナビゲーション装置、方法及びプログラムを提供することができる。
【図面の簡単な説明】
【0022】
【図1】本発明の実施形態の構成を示す機能ブロック図。
【図2】本発明の実施形態におけるプログラムの構成例を示す概念図。
【図3】本発明の実施形態における「立ち寄り先」の設定例を示す概念図。
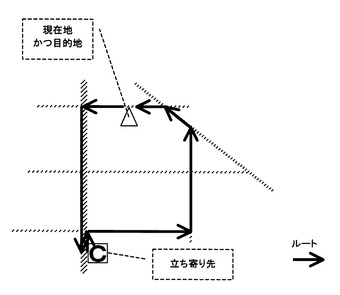
【図4】本発明の実施形態において、「立ち寄り先」を経由して戻るルートを示す概念図。
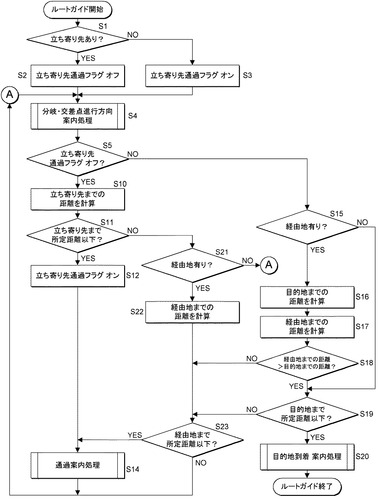
【図5】本発明の実施形態におけるルートガイドの処理手順を例示するフローチャート。
【発明を実施するための形態】
【0023】
次に、本発明の実施の形態(以下「実施形態」と呼ぶ)について図面を参照して具体的に説明する。なお、本実施形態は、周辺装置を備えたコンピュータをプログラムで制御することで実現できるが、この場合のハードウェアやプログラムの実現態様は各種変更可能であるから、以下の説明では、本発明及び本実施形態の各機能を実現する仮想的回路ブロックを用いる。
【0024】
〔1.構成〕
本実施形態は、本発明のナビゲーション装置(以下「本装置」と呼ぶ)であるが、本発明のナビゲーション方法及び(コンピュータ)プログラム、並びにそのようなコンピュータプログラムや、道路地図データを記録した記録媒体のカテゴリーでも把握可能であり、例えばそのようなプログラムや、道路地図データをインターネットや携帯電話網などの通信ネットワーク経由で各車両のナビゲーション装置にダウンロードして実行させることも本発明の一態様である。
【0025】
〔1−1.全体構成〕
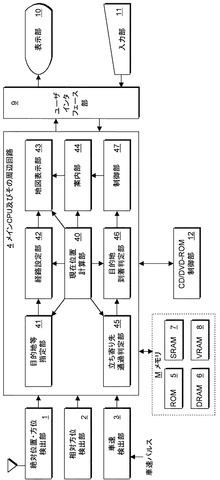
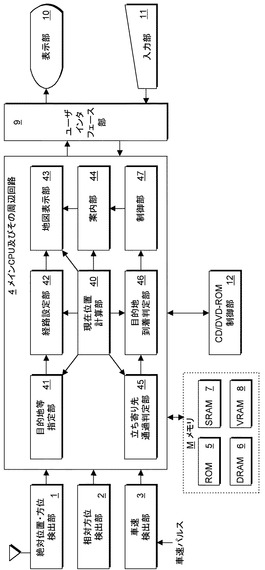
まず、本装置は、図1の機能ブロック図に示す下記の各要素を備えている。すなわち、絶対位置・方位検出部1は、本装置が搭載された自動車(自車と呼ぶ)の現在位置すなわち自車位置について、地表での絶対的な位置座標や方位を逐次検出すなわち計算するために、例えば、GPS衛星から送られてくるGPS電波をアンテナやレシーバなどで受信するための部分である。また、相対方位検出部2は、ジャイロなどを使って自車の相対的な方位を検出するための部分である。また、車速検出部3は、自動車より得られる車速パルスを処理することで自車の速度を計算する部分である。
【0026】
また、メインCPU及びその周辺回路4は、本装置全体を制御する制御回路の役割を果たす部分である。また、メモリ群Mは、本装置の動作に必要な各種のメモリで、例えば、プログラム格納用のROM5は本装置の起動時にメインCPUによりアクセスされる。また、ダイナミックRAM(DRAM)6は、メインプログラムのロード領域や、データ処理用のワークエリア提供などに用いられる。また、SRAM(スタティックRAM)7は、メイン電源がオフの間もバッテリーバックアップにより設定などの情報を保持し、再びオンになったときにメモリ内容を提供する。また、表示用のVRAM(ビデオRAM)8は表示部10に表示すべき画像のビットマップデータを格納する。
【0027】
また、表示部10は、地図や操作メニューなど各種の情報を、図示しない液晶表示画面や音声合成などで出力する部分である。また、入力部11は、ユーザがスイッチなどから命令などいろいろな情報を入力するための部分であり、タッチセンサ機能、リモコンユニット、赤外線送受信ユニットなどを備える。また、ユーザインタフェース部9は、I/O制御回路やデバイスドライバなどを使って、表示部10及び入力部11と、メインCPU及びその周辺回路4とを結ぶユーザインタフェースである。
【0028】
また、CD/DVD−ROM制御部12は、CD−ROMやDVD−ROMに記録された道路地図データなど各種データをデータベースから読み出す手段であり、道路のネットワーク構造や、施設等の情報を含む道路地図データを予め記憶した記憶手段である。
【0029】
〔1−2.メインCPU及びその周辺回路の役割〕
さらに、メインCPU及びその周辺回路4は、上記のようなプログラムの作用によって、図1に示す下記の各部分としての役割を果たすように構成されている。すなわち、現在位置検出部40は、自車の現在位置すなわち自車位置を計算するための手段であり、具体的には、GPS航法測位と自律航法測位とを組み合わせることで自車位置を計算するように構成される。
【0030】
ここで、GPS航法測位は、人工衛星からの電波に基づいて絶対位置・方位検出部1から得られる情報を使って現在位置を計算するものである。また、自律航法測位は、地磁気及び自車の速度に基づいて相対方位検出部2及び車速検出部3から得られる情報を使って現在位置を計算するものである。
【0031】
また、目的地等指定部41は、前記道路地図データに基いて表示される地図上からカーソルで指定したり、前記道路地図データに含まれる施設等からの選択などにより、目的地並びに立ち寄り先を指定する指定手段であり、立ち寄り先だけを指定した場合は現在地が自動的に目的地とみなされるようにしてもよい。
【0032】
また、経路設定部42は、指定された前記立ち寄り先を経て指定された前記目的地へ至る経路について、前記道路地図データに基く経路探索及び設定を行う手段である。また、地図表示部43は、前記道路地図データに基く現在位置周辺の地図上に、検出された現在位置を重ねて表示する手段であり、案内部44は、設定された前記経路に沿って画面表示や合成音声などにより経路案内を行う手段である。
【0033】
また、立ち寄り先通過判定部45は、設定された前記経路において、自車が前記立ち寄り先を通過したかを判定する立ち寄り先通過判定手段であり、目的地到着判定部46は、自車が前記立ち寄り先を通過した後に、自車が前記目的地に到着したかを判定する目的地到着判定手段である。この目的地到着判定部46は、前記立ち寄り先の通過前は、前記目的地に到着したかの判定を行わない。また、制御部47は、目的地到着判定部46が自車が目的地に到着したと判定した際に、案内部44による前記経路案内を終了させる手段である。
【0034】
〔2.作用〕
上記のように構成された本実施形態は以下のように作用する。
〔2−1.概略〕
ユーザは、ドライブの開始にあたり、まず、目的地等指定部41において、道路地図データに基いて表示される地図上からカーソルで指定したり、道路地図データに含まれる施設等からの選択などにより、目的地並びに立ち寄り先を指定する。この際、例えば、立ち寄り先だけを指定した場合は現在地が自動的に目的地とみなされる。
【0035】
このように立ち寄り先と目的地が指定されると、経路設定部42は、指定された立ち寄り先を経て指定された目的地へ至る経路について、道路地図データに基く経路の探索及び設定を行う。その後、地図表示部43は、道路地図データに基く現在位置周辺の地図上に、検出された現在位置を重ねて表示する処理を開始し、案内部44は、設定された経路に沿って画面表示や合成音声などにより経路案内を行う。
【0036】
また、立ち寄り先通過判定部45は、設定された経路において、自車が立ち寄り先を通過したかを逐次判定し、目的地到着判定部46は、自車が立ち寄り先を通過した後に、自車が目的地に到着したかを逐次判定する。ただし、この目的地到着判定部46は、立ち寄り先の通過前は、目的地に到着したかの判定を行わない。また、制御部47は、目的地到着判定部46が自車が目的地に到着したと判定した際に、案内部44による前記経路案内を終了させる。
【0037】
〔2−2.プログラムの例〕
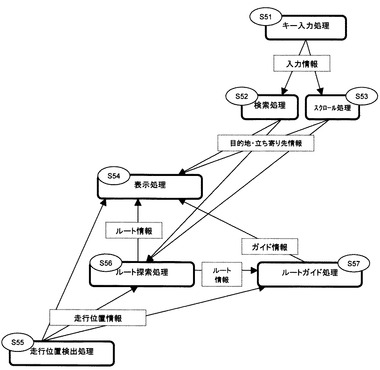
次に、上記のような本実施形態において、ROM5に格納されるプログラムの構成例を図2の概念図に示す。このなかで、キー入力処理(S51)は、ユーザの操作による入力部11からのキー入力を処理するもので、例えば、キー押下などの情報を検索処理(S52)あるいはスクロール処理(S53)へ出力する。
【0038】
検索処理(S52)は、CD/DVD−ROM制御部12からデータベースを読み取り、住所、業種名、電話番号等からの施設検索など必要な検索を行うものであり、スクロール処理(S53)は、スクロール操作に応じて地図やカーソルの移動を行う処理である。これら検索処理(S52)とスクロール処理(S53)は、検索あるいはスクロールにより得られた目的地・立ち寄り先に関する経度緯度などの情報を、ルート探索処理(S56)へ出力する。
【0039】
ルート探索処理(S56)は、このように情報を受け取ると、走行位置検出処理(S55)から現在の走行位置(現在位置や自車位置とも呼ぶ)を受け取り、現在位置から目的地へ到達するためのルートを探索する。ここで、走行位置検出処理(S55)は、所定時間経過または所定距離移動ごとに、絶対位置・方位検出部1、相対方位検出部2及び車速検出部3からの出力をもとに現在の走行位置を計算するものである。そして、ルート探索処理(S56)は、ルートを探索し終えると、表示処理(S54)とルートガイド処理(S57)へルート情報を出力する。
【0040】
このうちルートガイド処理(S57)は、交差点での右左折等を含むガイド情報を作成し、表示処理(S54)へ出力する。この表示処理(S54)は、ルート探索処理(S56)から出力されたルートの道路形状等を含むルート情報と、ルートガイド処理(S57)から出力されたガイド情報について、表示部10へ表示する処理である。
【0041】
〔2−3.立ち寄り先の設定例〕
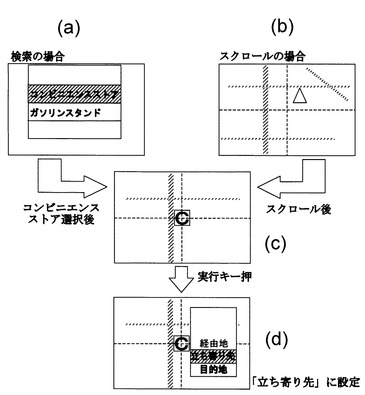
次に、図3は、立ち寄り先の設定方法を説明する概念図である。すなわち、ユーザは入力部11を操作することで、目的地等指定部41の作用により、立ち寄る先をCD/DVD−ROMに格納されたデータベースから、検索(図3(a))又は地図スクロール(図3(b))により探す。この際、それぞれに応じて、プログラムでは(図2)、検索処理(S52)又はスクロール処理(S53)が実行される。このうち、検索の場合は(図3(a))、施設を選択すると、検索結果としてその施設を含む地図が表示処理(S54)によって処理されることにより、表示部10に表示され、施設をカーソル(図中の十字点線)が指し示す状態となる(図3(c))。
【0042】
ここで入力部11に備えられた実行キーを押下すると、検索処理(S52)により作成されたメニューが表示部10に現れる(図3(d))。このメニューによりユーザは、カーソルが指し示している地点を経由地にするか、目的地にするか、立ち寄り先にするかを、入力部を操作することにより選ぶことができる。
【0043】
ここで、「経由地」は、経路計算(ルート探索)の条件としてユーザが指定するもので、立ち寄り先と違って、経由地から所定距離内を車両が通過しなくても車両が目的地付近に接近すると、目的地への案内に移行する。一方、「立ち寄り先」(立ち寄り地)は、通過が必須であり、立ち寄り先を通過しないと次の経由地または目的地案内に移行しない。
【0044】
図3(d)に例示したような画面で「目的地」を選ぶと、従来と同様に目的地としてルート探索処理(S56)に渡される。一方、「立ち寄り先」を選ぶと、その地点が立ち寄り先として設定される。また、「経由地」を選択した場合は、その地点が経由地として設定される。つまり、地点を地図スクロールで指定する場合は、実行キーが押下されたときのカーソルが示す位置について、図3(d)のようなメニューが現れ、その選択に応じてその地点が経由地、目的地あるいは立ち寄り先となる。
【0045】
上記のように立ち寄り先が設定されると、CPU4によって実現される経路設定部42は、ルート探索処理(S56)を開始する。その際、自動的に現在地を目的地とし、立ち寄り先を経由地(中継点)とみなすが、他の例として、目的地を別途指定できるようにしてもよい。例えば、立ち寄り先の指定後、カーソルが自動で現在地へ移動し、そのまま確認操作をすれば現在地が目的地となるが、カーソル移動操作で所望の位置を指定しなおせばそこが目的地となる。
【0046】
また、経由地を含むルート探索の基本的アルゴリズムは従来と同様でよく、例えば、経由地までと、そこから先とについて、相互に別個独立に、双方向探索等の経路探索アルゴリズムや経路ごとの区間コスト積算値比較などで探索する。ここで、図4は、立ち寄り先が設定された場合、表示部に表示されるルート探索結果を示している。
【0047】
このようにルート探索処理が終了したら、CPU4によって実現される案内部44は、ルートガイド処理(S57)を開始する。このルートガイド処理については、従来と同様の画面や音声出力による案内が可能であるが、本実施形態では、立ち寄り先通過判定部45及び目的地到着判定部46の作用により、立ち寄り先(経由地)を通過するまで、目的地到着の判定を行わない点が従来と異なる。
【0048】
〔2−4.ルートガイド処理手順の例〕
ここで、図5に、本実施形態におけるルートガイド処理のフローチャートを示す。このルートガイド処理においては、まず、その初期化時に(ステップ1〜3)、立ち寄り先がない場合は(ステップ1)立ち寄り先通過フラグをオンにするが(ステップ3)、立ち寄り先がある場合は(ステップ1)、立ち寄り先通過フラグをオフにする(ステップ2)。
【0049】
このような初期化後、ループに入り、従来どおりの分岐・交差点案内を実行する(ステップ4)。その後、立ち寄り先までの走行中位置からの距離を調べ(ステップ10)、所定値以下なら(ステップ11)立ち寄り先通過フラグをオンにする(ステップ12)。そして、このような処理を前提に、立ち寄り先通過フラグがオフの間は(ステップ5)、経由地の通過と目的地到着の判定及び案内(ステップ15〜23)はスキップされる。これにより出発地が目的地と同一でも、従来のように出発地にいる間に目的地到着と判定されることがなく、立ち寄り先へのルートガイドが可能となる。
【0050】
そして、立ち寄り先を通過し(ステップ11)、立ち寄り先通過フラグがオンになると(ステップ12)、処理の流れに目的地への到着判定が入り(ステップ5,19)、目的地到着の際は(ステップ19)その旨を案内し(ステップ20)、ルートガイド処理が終了する。
【0051】
経由地が設定されている場合、立ち寄り先通過前は(ステップ21)、経由地(ステップ22)まで所定距離以下になると(ステップ23)経由地の通過が案内され(ステップ14)、立ち寄り先通過後は(ステップ15)、目的地までの距離(ステップ16)が経由地までの距離(ステップ17)より小さければ(ステップ18)すなわち目的地の方が経由地より近ければ目的地到着の判定(ステップ19)と案内(ステップ20)が優先されるが、目的地より経由地が近ければ(ステップ18)、経由地通過の判定(ステップ23)と案内(ステップ14)が優先される。
【0052】
〔3.効果〕
以上説明したように、本実施形態では、所望の立ち寄り先を設定するだけで、現在地から立ち寄り先を経由し、ふたたび現在地やその付近に戻るルートについて探索、案内を受けられ、経路探索が行われなかったり、経路案内が開始後直ちに終了するなどの不都合が回避されるので、立ち寄り先から戻るルートを改めて別途探索するなどの手間を省きユーザの負担を軽減することができる。
【0053】
特に、本実施形態では、立ち寄り先通過までは目的地到着判定を行わず、立ち寄り先通過後は、経由地を通過したか否かを問わず目的地到着判定を行う。このため、経路探索が行われなかったり、経路案内が開始後直ちに終了するなどの不都合が回避され、立ち寄り先の前と後を分けて経路探索するといったユーザの操作回数を減らし、負担を軽減することができることに加え、通過必須の立ち寄り先とそうでない経由地との種類に応じたナビゲーション処理が実現される。
【0054】
〔4.他の実施形態〕
なお、本発明は上記実施形態に限定されるものではなく、次に例示するような他の実施形態も含むものである。例えば、図1に示した構成、図2に示したプログラム構成、図3に示した画面例、図4に示した実例、図5に示した処理手順の例はいずれも例示に過ぎず、他の態様も採用可能である。
【0055】
例えば、上記実施形態では、立ち寄り先の通過を判定後に目的地到着の判定を行うようにしたが、これに代え、出発地から所定距離走行するまでは、前記目的地に到着したかの判定を行なわないようにしてもよい。
【0056】
このようにすれば、出発地から所定距離走行するまでは、前記目的地に到着したかの判定を行なわないことにより、立ち寄り先を通過したかを判定しなくても、経路探索が行われなかったり、経路案内が開始後直ちに終了するなどの不都合が回避され、立ち寄り先の前と後を分けて経路探索するといったユーザの操作回数を減らし、負担を軽減することができる。
【符号の説明】
【0057】
1…絶対位置・方位検出部
2…相対方位検出部
3…車速検出部
4…メインCPU及びその周辺回路
5…ROM
6…DRAM
7…SRAM
8…VRAM
9…ユーザインタフェース部
10…表示部
11…入力部
12…CD/DVD−ROM制御部
40…現在位置検出部
41…目的地等指定部
42…経路設定部
43…地図表示部
44…案内部
45…立ち寄り先通過判定部
46…目的地到着判定部
47…制御部
M…メモリ群
【技術分野】
【0001】
本発明は、与えられる立ち寄り先を経て出発地すなわち現在地等へ戻るルートを探索及びガイドするナビゲーション装置、方法及びプログラムに関するものである。
【背景技術】
【0002】
近年、自動車の普及と情報処理技術の進展に伴い、ナビゲーション装置に関する技術が急速に進歩しつつある。ナビゲーション装置は、自動車等の移動体に関する経路誘導(単に「誘導」や「ガイド」、「ルートガイド」などとも呼ぶ)を行うもので、道路のネットワーク構造や周辺施設等を表す道路地図データを予め用意し、指定された目的地までの最適な経路(ルートとも呼ぶ)を前記データに基いて計算して誘導経路として設定(ルート設定とも呼ぶ)し、GPS等によりリアルタイムに判断する自車位置とその周辺地図を画面表示しながら、右左折などの誘導案内を合成音声や画面表示で出力するものである。
【0003】
上記のような従来技術で目的地を指定するには、例えば、画面表示中の地図をスクロールさせてカーソルで指定したり、店舗等の施設を住所・名称・電話番号・名称等で絞込み検索した候補から指定する。また、このように指定された目的地の所定距離以内まで自車位置が接近すると、それをもって目的地到着判定が行われ、目的地に到着したことを音声や画面表示でユーザに伝え、ルートガイドを終了する。
【0004】
すなわち、このように目的地が近い場合は、ルート設定をしてもすぐにルートガイドが終了することになって実益が乏しいため、従来では、ルート探索する際に画面表示によりその旨のメッセージを出した上で、ルート探索自体を行わないようにしていた。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−074486号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、実際の自動車利用の場面では、現在地からある程度離れた立ち寄り先にいったん立ち寄り、そのうえで再度、現在地やその近くに戻りたい場合も考えられる。しかしながら、このように指定された目的地が現在地から所定以内の近距離の場合や、例えば現在地と同一地点の場合、上記のように従来技術では、目的地到着判定により目的地に到着した事を音声または画面表示によりユーザに伝え、ルートガイド終了となってしまう。
【0007】
このため、従来技術では、立ち寄り先に基いたナビゲーションの利用が困難という問題があった。特に、どうしてもどこかに寄り道をしてまた現在地に戻りたい場合、まず立ち寄り先を目的地にしていったんルート探索をさせてルートガイドを利用し、その後で、その立ち寄り先から戻りたい位置を目的地にして再度ルート探索を行わねばならず、その操作も煩雑であった。
【0008】
本発明は、上記のような従来技術の問題点を解決するために提案されたもので、その目的は、与えられる立ち寄り先を経て出発地すなわち現在地等へ戻るルートを探索及びガイドするナビゲーション装置、方法及びプログラムを提供することである。
【課題を解決するための手段】
【0009】
上記の目的を達成するため、請求項1のナビゲーション装置は、目的地及び経由地を設定する手段と、車両の現在地を検出する手段と、出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定手段と、前記経路設定手段により設定された経路に基づき目的地までの経路案内を行う手段と、前記目的地が前記車両の現在地近傍に設定されている場合に、前記経路案内が行なわれないことを回避する手段と、を備えたことを特徴とする。
【0010】
請求項4のナビゲーション方法は、請求項1の発明を方法という見方からとらえたもので、コンピュータが、目的地及び経由地を設定する処理と、車両の現在地を検出する処理と、出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定処理と、前記経路設定処理により設定された経路に基づき目的地までの経路案内を行う処理と、前記目的地が前記車両の現在地近傍に設定されている場合に、前記経路案内が行なわれないことを回避する処理と、を実行することを特徴とする。
【0011】
請求項7のナビゲーションプログラムは、請求項1,4の発明をコンピュータプログラムという見方から捉えたもので、コンピュータに、目的地及び経由地を設定する機能と、車両の現在地を検出する機能と、出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定機能と、前記経路設定機能により設定された経路に基づき目的地までの経路案内を行う機能と、前記目的地が前記車両の現在地近傍に設定されている場合に、前記経路案内が行なわれないことを回避する機能と、を実現させることを特徴とする。
【0012】
これらの態様では、現在地から立ち寄り先を経由し、ふたたび現在地やその付近に戻るルートについて探索、案内を適切に受けられ、経路探索が行われなかったり、経路案内が開始後直ちに終了するなどの不都合が回避されるので、立ち寄り先から戻るルートを改めて別途探索するなどの手間を省きユーザの負担を軽減することができる。
【0013】
請求項2の発明は、請求項1記載のナビゲーション装置において、前記経路案内が行なわれないことを回避する手段は、前記車両が前記出発地から所定距離移動するまで機能することを特徴とする。
【0014】
請求項5の発明は、請求項4記載のナビゲーション方法において、前記経路案内が行なわれないことを回避する処理は、前記車両が前記出発地から所定距離移動するまで実行されることを特徴とする。
【0015】
請求項8の発明は、請求項7記載のナビゲーションプログラムにおいて、前記経路案内が行なわれないことを回避する機能は、前記車両が前記出発地から所定距離移動するまで実行される機能であることを特徴とする。
【0016】
これらの態様では、出発地から所定距離走行するまでは、経路案内の終了を禁止するので、立ち寄り先を通過したかを判定しなくても、経路探索が行われなかったり、経路案内が開始後直ちに終了するなどの不都合が回避され、立ち寄り先の前と後を分けて経路探索するといったユーザの操作回数を減らし、負担を軽減することができる。
【0017】
請求項3のナビゲーション装置は、目的地及び経由地を設定する手段と、車両の現在地を検出する手段と、出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定手段と、前記経路設定手段により設定された経路に基づき目的地までの経路案内を行う手段と、前記車両が前記目的地に到着したことを判定する判定手段と、前記判定手段により前記車両が目的地に到着したと判定された場合に、前記経路案内を終了させる手段と、を備え、前記判定手段は、前記車両が前記出発地から所定距離移動するまでは、前記経路案内の終了を禁止することを特徴とする。
【0018】
請求項6のナビゲーション方法は、請求項3の発明を方法という見方から捉えたもので、コンピュータが、目的地及び経由地を設定する処理と、車両の現在地を検出する処理と、出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定処理と、前記経路設定処理により設定された経路に基づき目的地までの経路案内を行う処理と、前記車両が前記目的地に到着したことを判定する処理と、前記判定処理により前記車両が目的地に到着したと判定された場合に、前記経路案内を終了させる処理と、を実行するものであって、前記判定処理は、前記車両が前記出発地から所定距離移動するまでは、前記経路案内の終了を禁止することを特徴とする。
【0019】
請求項9のナビゲーションプログラムは、コンピュータに、目的地及び経由地を設定する機能と、車両の現在地を検出する機能と、出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定機能と、前記経路設定機能により設定された経路に基づき目的地までの経路案内を行う機能と、前記車両が前記目的地に到着したことを判定する機能と、前記判定機能により前記車両が目的地に到着したと判定された場合に、前記経路案内を終了させる機能と、を実現させるものであって、前記判定機能は、前記車両が前記出発地から所定距離移動するまでは、前記経路案内の終了を禁止する機能であることを特徴とする。
【0020】
これらの態様では、出発地から所定距離走行するまでは、前記経路案内の終了を禁止するので、立ち寄り先を通過したかを判定しなくても、経路探索が行われなかったり、経路案内が開始後直ちに終了するなどの不都合が回避され、立ち寄り先の前と後を分けて経路探索するといったユーザの操作回数を減らし、負担を軽減することができる。
【発明の効果】
【0021】
以上のように、この発明によれば、与えられる立ち寄り先を経て出発地すなわち現在地等へ戻るルートを探索及びガイドするナビゲーション装置、方法及びプログラムを提供することができる。
【図面の簡単な説明】
【0022】
【図1】本発明の実施形態の構成を示す機能ブロック図。
【図2】本発明の実施形態におけるプログラムの構成例を示す概念図。
【図3】本発明の実施形態における「立ち寄り先」の設定例を示す概念図。
【図4】本発明の実施形態において、「立ち寄り先」を経由して戻るルートを示す概念図。
【図5】本発明の実施形態におけるルートガイドの処理手順を例示するフローチャート。
【発明を実施するための形態】
【0023】
次に、本発明の実施の形態(以下「実施形態」と呼ぶ)について図面を参照して具体的に説明する。なお、本実施形態は、周辺装置を備えたコンピュータをプログラムで制御することで実現できるが、この場合のハードウェアやプログラムの実現態様は各種変更可能であるから、以下の説明では、本発明及び本実施形態の各機能を実現する仮想的回路ブロックを用いる。
【0024】
〔1.構成〕
本実施形態は、本発明のナビゲーション装置(以下「本装置」と呼ぶ)であるが、本発明のナビゲーション方法及び(コンピュータ)プログラム、並びにそのようなコンピュータプログラムや、道路地図データを記録した記録媒体のカテゴリーでも把握可能であり、例えばそのようなプログラムや、道路地図データをインターネットや携帯電話網などの通信ネットワーク経由で各車両のナビゲーション装置にダウンロードして実行させることも本発明の一態様である。
【0025】
〔1−1.全体構成〕
まず、本装置は、図1の機能ブロック図に示す下記の各要素を備えている。すなわち、絶対位置・方位検出部1は、本装置が搭載された自動車(自車と呼ぶ)の現在位置すなわち自車位置について、地表での絶対的な位置座標や方位を逐次検出すなわち計算するために、例えば、GPS衛星から送られてくるGPS電波をアンテナやレシーバなどで受信するための部分である。また、相対方位検出部2は、ジャイロなどを使って自車の相対的な方位を検出するための部分である。また、車速検出部3は、自動車より得られる車速パルスを処理することで自車の速度を計算する部分である。
【0026】
また、メインCPU及びその周辺回路4は、本装置全体を制御する制御回路の役割を果たす部分である。また、メモリ群Mは、本装置の動作に必要な各種のメモリで、例えば、プログラム格納用のROM5は本装置の起動時にメインCPUによりアクセスされる。また、ダイナミックRAM(DRAM)6は、メインプログラムのロード領域や、データ処理用のワークエリア提供などに用いられる。また、SRAM(スタティックRAM)7は、メイン電源がオフの間もバッテリーバックアップにより設定などの情報を保持し、再びオンになったときにメモリ内容を提供する。また、表示用のVRAM(ビデオRAM)8は表示部10に表示すべき画像のビットマップデータを格納する。
【0027】
また、表示部10は、地図や操作メニューなど各種の情報を、図示しない液晶表示画面や音声合成などで出力する部分である。また、入力部11は、ユーザがスイッチなどから命令などいろいろな情報を入力するための部分であり、タッチセンサ機能、リモコンユニット、赤外線送受信ユニットなどを備える。また、ユーザインタフェース部9は、I/O制御回路やデバイスドライバなどを使って、表示部10及び入力部11と、メインCPU及びその周辺回路4とを結ぶユーザインタフェースである。
【0028】
また、CD/DVD−ROM制御部12は、CD−ROMやDVD−ROMに記録された道路地図データなど各種データをデータベースから読み出す手段であり、道路のネットワーク構造や、施設等の情報を含む道路地図データを予め記憶した記憶手段である。
【0029】
〔1−2.メインCPU及びその周辺回路の役割〕
さらに、メインCPU及びその周辺回路4は、上記のようなプログラムの作用によって、図1に示す下記の各部分としての役割を果たすように構成されている。すなわち、現在位置検出部40は、自車の現在位置すなわち自車位置を計算するための手段であり、具体的には、GPS航法測位と自律航法測位とを組み合わせることで自車位置を計算するように構成される。
【0030】
ここで、GPS航法測位は、人工衛星からの電波に基づいて絶対位置・方位検出部1から得られる情報を使って現在位置を計算するものである。また、自律航法測位は、地磁気及び自車の速度に基づいて相対方位検出部2及び車速検出部3から得られる情報を使って現在位置を計算するものである。
【0031】
また、目的地等指定部41は、前記道路地図データに基いて表示される地図上からカーソルで指定したり、前記道路地図データに含まれる施設等からの選択などにより、目的地並びに立ち寄り先を指定する指定手段であり、立ち寄り先だけを指定した場合は現在地が自動的に目的地とみなされるようにしてもよい。
【0032】
また、経路設定部42は、指定された前記立ち寄り先を経て指定された前記目的地へ至る経路について、前記道路地図データに基く経路探索及び設定を行う手段である。また、地図表示部43は、前記道路地図データに基く現在位置周辺の地図上に、検出された現在位置を重ねて表示する手段であり、案内部44は、設定された前記経路に沿って画面表示や合成音声などにより経路案内を行う手段である。
【0033】
また、立ち寄り先通過判定部45は、設定された前記経路において、自車が前記立ち寄り先を通過したかを判定する立ち寄り先通過判定手段であり、目的地到着判定部46は、自車が前記立ち寄り先を通過した後に、自車が前記目的地に到着したかを判定する目的地到着判定手段である。この目的地到着判定部46は、前記立ち寄り先の通過前は、前記目的地に到着したかの判定を行わない。また、制御部47は、目的地到着判定部46が自車が目的地に到着したと判定した際に、案内部44による前記経路案内を終了させる手段である。
【0034】
〔2.作用〕
上記のように構成された本実施形態は以下のように作用する。
〔2−1.概略〕
ユーザは、ドライブの開始にあたり、まず、目的地等指定部41において、道路地図データに基いて表示される地図上からカーソルで指定したり、道路地図データに含まれる施設等からの選択などにより、目的地並びに立ち寄り先を指定する。この際、例えば、立ち寄り先だけを指定した場合は現在地が自動的に目的地とみなされる。
【0035】
このように立ち寄り先と目的地が指定されると、経路設定部42は、指定された立ち寄り先を経て指定された目的地へ至る経路について、道路地図データに基く経路の探索及び設定を行う。その後、地図表示部43は、道路地図データに基く現在位置周辺の地図上に、検出された現在位置を重ねて表示する処理を開始し、案内部44は、設定された経路に沿って画面表示や合成音声などにより経路案内を行う。
【0036】
また、立ち寄り先通過判定部45は、設定された経路において、自車が立ち寄り先を通過したかを逐次判定し、目的地到着判定部46は、自車が立ち寄り先を通過した後に、自車が目的地に到着したかを逐次判定する。ただし、この目的地到着判定部46は、立ち寄り先の通過前は、目的地に到着したかの判定を行わない。また、制御部47は、目的地到着判定部46が自車が目的地に到着したと判定した際に、案内部44による前記経路案内を終了させる。
【0037】
〔2−2.プログラムの例〕
次に、上記のような本実施形態において、ROM5に格納されるプログラムの構成例を図2の概念図に示す。このなかで、キー入力処理(S51)は、ユーザの操作による入力部11からのキー入力を処理するもので、例えば、キー押下などの情報を検索処理(S52)あるいはスクロール処理(S53)へ出力する。
【0038】
検索処理(S52)は、CD/DVD−ROM制御部12からデータベースを読み取り、住所、業種名、電話番号等からの施設検索など必要な検索を行うものであり、スクロール処理(S53)は、スクロール操作に応じて地図やカーソルの移動を行う処理である。これら検索処理(S52)とスクロール処理(S53)は、検索あるいはスクロールにより得られた目的地・立ち寄り先に関する経度緯度などの情報を、ルート探索処理(S56)へ出力する。
【0039】
ルート探索処理(S56)は、このように情報を受け取ると、走行位置検出処理(S55)から現在の走行位置(現在位置や自車位置とも呼ぶ)を受け取り、現在位置から目的地へ到達するためのルートを探索する。ここで、走行位置検出処理(S55)は、所定時間経過または所定距離移動ごとに、絶対位置・方位検出部1、相対方位検出部2及び車速検出部3からの出力をもとに現在の走行位置を計算するものである。そして、ルート探索処理(S56)は、ルートを探索し終えると、表示処理(S54)とルートガイド処理(S57)へルート情報を出力する。
【0040】
このうちルートガイド処理(S57)は、交差点での右左折等を含むガイド情報を作成し、表示処理(S54)へ出力する。この表示処理(S54)は、ルート探索処理(S56)から出力されたルートの道路形状等を含むルート情報と、ルートガイド処理(S57)から出力されたガイド情報について、表示部10へ表示する処理である。
【0041】
〔2−3.立ち寄り先の設定例〕
次に、図3は、立ち寄り先の設定方法を説明する概念図である。すなわち、ユーザは入力部11を操作することで、目的地等指定部41の作用により、立ち寄る先をCD/DVD−ROMに格納されたデータベースから、検索(図3(a))又は地図スクロール(図3(b))により探す。この際、それぞれに応じて、プログラムでは(図2)、検索処理(S52)又はスクロール処理(S53)が実行される。このうち、検索の場合は(図3(a))、施設を選択すると、検索結果としてその施設を含む地図が表示処理(S54)によって処理されることにより、表示部10に表示され、施設をカーソル(図中の十字点線)が指し示す状態となる(図3(c))。
【0042】
ここで入力部11に備えられた実行キーを押下すると、検索処理(S52)により作成されたメニューが表示部10に現れる(図3(d))。このメニューによりユーザは、カーソルが指し示している地点を経由地にするか、目的地にするか、立ち寄り先にするかを、入力部を操作することにより選ぶことができる。
【0043】
ここで、「経由地」は、経路計算(ルート探索)の条件としてユーザが指定するもので、立ち寄り先と違って、経由地から所定距離内を車両が通過しなくても車両が目的地付近に接近すると、目的地への案内に移行する。一方、「立ち寄り先」(立ち寄り地)は、通過が必須であり、立ち寄り先を通過しないと次の経由地または目的地案内に移行しない。
【0044】
図3(d)に例示したような画面で「目的地」を選ぶと、従来と同様に目的地としてルート探索処理(S56)に渡される。一方、「立ち寄り先」を選ぶと、その地点が立ち寄り先として設定される。また、「経由地」を選択した場合は、その地点が経由地として設定される。つまり、地点を地図スクロールで指定する場合は、実行キーが押下されたときのカーソルが示す位置について、図3(d)のようなメニューが現れ、その選択に応じてその地点が経由地、目的地あるいは立ち寄り先となる。
【0045】
上記のように立ち寄り先が設定されると、CPU4によって実現される経路設定部42は、ルート探索処理(S56)を開始する。その際、自動的に現在地を目的地とし、立ち寄り先を経由地(中継点)とみなすが、他の例として、目的地を別途指定できるようにしてもよい。例えば、立ち寄り先の指定後、カーソルが自動で現在地へ移動し、そのまま確認操作をすれば現在地が目的地となるが、カーソル移動操作で所望の位置を指定しなおせばそこが目的地となる。
【0046】
また、経由地を含むルート探索の基本的アルゴリズムは従来と同様でよく、例えば、経由地までと、そこから先とについて、相互に別個独立に、双方向探索等の経路探索アルゴリズムや経路ごとの区間コスト積算値比較などで探索する。ここで、図4は、立ち寄り先が設定された場合、表示部に表示されるルート探索結果を示している。
【0047】
このようにルート探索処理が終了したら、CPU4によって実現される案内部44は、ルートガイド処理(S57)を開始する。このルートガイド処理については、従来と同様の画面や音声出力による案内が可能であるが、本実施形態では、立ち寄り先通過判定部45及び目的地到着判定部46の作用により、立ち寄り先(経由地)を通過するまで、目的地到着の判定を行わない点が従来と異なる。
【0048】
〔2−4.ルートガイド処理手順の例〕
ここで、図5に、本実施形態におけるルートガイド処理のフローチャートを示す。このルートガイド処理においては、まず、その初期化時に(ステップ1〜3)、立ち寄り先がない場合は(ステップ1)立ち寄り先通過フラグをオンにするが(ステップ3)、立ち寄り先がある場合は(ステップ1)、立ち寄り先通過フラグをオフにする(ステップ2)。
【0049】
このような初期化後、ループに入り、従来どおりの分岐・交差点案内を実行する(ステップ4)。その後、立ち寄り先までの走行中位置からの距離を調べ(ステップ10)、所定値以下なら(ステップ11)立ち寄り先通過フラグをオンにする(ステップ12)。そして、このような処理を前提に、立ち寄り先通過フラグがオフの間は(ステップ5)、経由地の通過と目的地到着の判定及び案内(ステップ15〜23)はスキップされる。これにより出発地が目的地と同一でも、従来のように出発地にいる間に目的地到着と判定されることがなく、立ち寄り先へのルートガイドが可能となる。
【0050】
そして、立ち寄り先を通過し(ステップ11)、立ち寄り先通過フラグがオンになると(ステップ12)、処理の流れに目的地への到着判定が入り(ステップ5,19)、目的地到着の際は(ステップ19)その旨を案内し(ステップ20)、ルートガイド処理が終了する。
【0051】
経由地が設定されている場合、立ち寄り先通過前は(ステップ21)、経由地(ステップ22)まで所定距離以下になると(ステップ23)経由地の通過が案内され(ステップ14)、立ち寄り先通過後は(ステップ15)、目的地までの距離(ステップ16)が経由地までの距離(ステップ17)より小さければ(ステップ18)すなわち目的地の方が経由地より近ければ目的地到着の判定(ステップ19)と案内(ステップ20)が優先されるが、目的地より経由地が近ければ(ステップ18)、経由地通過の判定(ステップ23)と案内(ステップ14)が優先される。
【0052】
〔3.効果〕
以上説明したように、本実施形態では、所望の立ち寄り先を設定するだけで、現在地から立ち寄り先を経由し、ふたたび現在地やその付近に戻るルートについて探索、案内を受けられ、経路探索が行われなかったり、経路案内が開始後直ちに終了するなどの不都合が回避されるので、立ち寄り先から戻るルートを改めて別途探索するなどの手間を省きユーザの負担を軽減することができる。
【0053】
特に、本実施形態では、立ち寄り先通過までは目的地到着判定を行わず、立ち寄り先通過後は、経由地を通過したか否かを問わず目的地到着判定を行う。このため、経路探索が行われなかったり、経路案内が開始後直ちに終了するなどの不都合が回避され、立ち寄り先の前と後を分けて経路探索するといったユーザの操作回数を減らし、負担を軽減することができることに加え、通過必須の立ち寄り先とそうでない経由地との種類に応じたナビゲーション処理が実現される。
【0054】
〔4.他の実施形態〕
なお、本発明は上記実施形態に限定されるものではなく、次に例示するような他の実施形態も含むものである。例えば、図1に示した構成、図2に示したプログラム構成、図3に示した画面例、図4に示した実例、図5に示した処理手順の例はいずれも例示に過ぎず、他の態様も採用可能である。
【0055】
例えば、上記実施形態では、立ち寄り先の通過を判定後に目的地到着の判定を行うようにしたが、これに代え、出発地から所定距離走行するまでは、前記目的地に到着したかの判定を行なわないようにしてもよい。
【0056】
このようにすれば、出発地から所定距離走行するまでは、前記目的地に到着したかの判定を行なわないことにより、立ち寄り先を通過したかを判定しなくても、経路探索が行われなかったり、経路案内が開始後直ちに終了するなどの不都合が回避され、立ち寄り先の前と後を分けて経路探索するといったユーザの操作回数を減らし、負担を軽減することができる。
【符号の説明】
【0057】
1…絶対位置・方位検出部
2…相対方位検出部
3…車速検出部
4…メインCPU及びその周辺回路
5…ROM
6…DRAM
7…SRAM
8…VRAM
9…ユーザインタフェース部
10…表示部
11…入力部
12…CD/DVD−ROM制御部
40…現在位置検出部
41…目的地等指定部
42…経路設定部
43…地図表示部
44…案内部
45…立ち寄り先通過判定部
46…目的地到着判定部
47…制御部
M…メモリ群
【特許請求の範囲】
【請求項1】
目的地及び経由地を設定する手段と、
車両の現在地を検出する手段と、
出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定手段と、
前記経路設定手段により設定された経路に基づき目的地までの経路案内を行う手段と、
前記目的地が前記車両の現在地近傍に設定されている場合に、前記経路案内が行なわれないことを回避する手段と、
を備えたことを特徴とするナビゲーション装置。
【請求項2】
前記経路案内が行なわれないことを回避する手段は、前記車両が前記出発地から所定距離移動するまで機能することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
目的地及び経由地を設定する手段と、
車両の現在地を検出する手段と、
出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定手段と、
前記経路設定手段により設定された経路に基づき目的地までの経路案内を行う手段と、
前記車両が前記目的地に到着したことを判定する判定手段と、
前記判定手段により前記車両が目的地に到着したと判定された場合に、前記経路案内を終了させる手段と、を備え、
前記判定手段は、前記車両が前記出発地から所定距離移動するまでは、前記経路案内の終了を禁止することを特徴とするナビゲーション装置。
【請求項4】
コンピュータが、
目的地及び経由地を設定する処理と、
車両の現在地を検出する処理と、
出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定処理と、
前記経路設定処理により設定された経路に基づき目的地までの経路案内を行う処理と、
前記目的地が前記車両の現在地近傍に設定されている場合に、前記経路案内が行なわれないことを回避する処理と、
を実行することを特徴とするナビゲーション方法。
【請求項5】
前記経路案内が行なわれないことを回避する処理は、前記車両が前記出発地から所定距離移動するまで実行されることを特徴とする請求項4に記載のナビゲーション方法。
【請求項6】
コンピュータが、
目的地及び経由地を設定する処理と、
車両の現在地を検出する処理と、
出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定処理と、
前記経路設定処理により設定された経路に基づき目的地までの経路案内を行う処理と、
前記車両が前記目的地に到着したことを判定する処理と、
前記判定処理により前記車両が目的地に到着したと判定された場合に、前記経路案内を終了させる処理と、を実行するものであって、
前記判定処理は、前記車両が前記出発地から所定距離移動するまでは、前記経路案内の終了を禁止することを特徴とするナビゲーション方法。
【請求項7】
コンピュータに、
目的地及び経由地を設定する機能と、
車両の現在地を検出する機能と、
出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定機能と、
前記経路設定機能により設定された経路に基づき目的地までの経路案内を行う機能と、
前記目的地が前記車両の現在地近傍に設定されている場合に、前記経路案内が行なわれないことを回避する機能と、
を実現させることを特徴とするナビゲーションプログラム。
【請求項8】
前記経路案内が行なわれないことを回避する機能は、前記車両が前記出発地から所定距離移動するまで実行される機能であることを特徴とする請求項7に記載のナビゲーションプログラム。
【請求項9】
コンピュータに、
目的地及び経由地を設定する機能と、
車両の現在地を検出する機能と、
出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定機能と、
前記経路設定機能により設定された経路に基づき目的地までの経路案内を行う機能と、
前記車両が前記目的地に到着したことを判定する機能と、
前記判定機能により前記車両が目的地に到着したと判定された場合に、前記経路案内を終了させる機能と、を実現させるものであって、
前記判定機能は、前記車両が前記出発地から所定距離移動するまでは、前記経路案内の終了を禁止する機能であることを特徴とするナビゲーションプログラム。
【請求項1】
目的地及び経由地を設定する手段と、
車両の現在地を検出する手段と、
出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定手段と、
前記経路設定手段により設定された経路に基づき目的地までの経路案内を行う手段と、
前記目的地が前記車両の現在地近傍に設定されている場合に、前記経路案内が行なわれないことを回避する手段と、
を備えたことを特徴とするナビゲーション装置。
【請求項2】
前記経路案内が行なわれないことを回避する手段は、前記車両が前記出発地から所定距離移動するまで機能することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
目的地及び経由地を設定する手段と、
車両の現在地を検出する手段と、
出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定手段と、
前記経路設定手段により設定された経路に基づき目的地までの経路案内を行う手段と、
前記車両が前記目的地に到着したことを判定する判定手段と、
前記判定手段により前記車両が目的地に到着したと判定された場合に、前記経路案内を終了させる手段と、を備え、
前記判定手段は、前記車両が前記出発地から所定距離移動するまでは、前記経路案内の終了を禁止することを特徴とするナビゲーション装置。
【請求項4】
コンピュータが、
目的地及び経由地を設定する処理と、
車両の現在地を検出する処理と、
出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定処理と、
前記経路設定処理により設定された経路に基づき目的地までの経路案内を行う処理と、
前記目的地が前記車両の現在地近傍に設定されている場合に、前記経路案内が行なわれないことを回避する処理と、
を実行することを特徴とするナビゲーション方法。
【請求項5】
前記経路案内が行なわれないことを回避する処理は、前記車両が前記出発地から所定距離移動するまで実行されることを特徴とする請求項4に記載のナビゲーション方法。
【請求項6】
コンピュータが、
目的地及び経由地を設定する処理と、
車両の現在地を検出する処理と、
出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定処理と、
前記経路設定処理により設定された経路に基づき目的地までの経路案内を行う処理と、
前記車両が前記目的地に到着したことを判定する処理と、
前記判定処理により前記車両が目的地に到着したと判定された場合に、前記経路案内を終了させる処理と、を実行するものであって、
前記判定処理は、前記車両が前記出発地から所定距離移動するまでは、前記経路案内の終了を禁止することを特徴とするナビゲーション方法。
【請求項7】
コンピュータに、
目的地及び経由地を設定する機能と、
車両の現在地を検出する機能と、
出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定機能と、
前記経路設定機能により設定された経路に基づき目的地までの経路案内を行う機能と、
前記目的地が前記車両の現在地近傍に設定されている場合に、前記経路案内が行なわれないことを回避する機能と、
を実現させることを特徴とするナビゲーションプログラム。
【請求項8】
前記経路案内が行なわれないことを回避する機能は、前記車両が前記出発地から所定距離移動するまで実行される機能であることを特徴とする請求項7に記載のナビゲーションプログラム。
【請求項9】
コンピュータに、
目的地及び経由地を設定する機能と、
車両の現在地を検出する機能と、
出発地から前記経由地を経由して前記目的地に至る経路の設定を行なう経路設定機能と、
前記経路設定機能により設定された経路に基づき目的地までの経路案内を行う機能と、
前記車両が前記目的地に到着したことを判定する機能と、
前記判定機能により前記車両が目的地に到着したと判定された場合に、前記経路案内を終了させる機能と、を実現させるものであって、
前記判定機能は、前記車両が前記出発地から所定距離移動するまでは、前記経路案内の終了を禁止する機能であることを特徴とするナビゲーションプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2009−198520(P2009−198520A)
【公開日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願番号】特願2009−137696(P2009−137696)
【出願日】平成21年6月8日(2009.6.8)
【分割の表示】特願2003−173862(P2003−173862)の分割
【原出願日】平成15年6月18日(2003.6.18)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願日】平成21年6月8日(2009.6.8)
【分割の表示】特願2003−173862(P2003−173862)の分割
【原出願日】平成15年6月18日(2003.6.18)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]