
ナビゲーション装置、方法及びプログラム
【課題】車両が道路の分岐点に進入する直前においてもユーザが案内画像を視て分岐先の案内経路を認識することができるナビゲーション装置を提供する。
【解決手段】撮像部が撮像する実風景画像をリアルタイムで表示部の親画面に表示し、案内経路から得られ当該実風景画像上でユーザに提示すべき第1の経路オブジェクトを当該実風景画像に重畳表示する親画面表示制御部と、予め撮像された実風景画像である蓄積実風景画像を表示部の子画面に表示し、案内経路から得られ当該蓄積実風景画像上でユーザに提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示する子画面表示制御部とを備え、蓄積実風景画像は、移動体が現在位置よりも進んだ位置で予め撮像された画像である。
【解決手段】撮像部が撮像する実風景画像をリアルタイムで表示部の親画面に表示し、案内経路から得られ当該実風景画像上でユーザに提示すべき第1の経路オブジェクトを当該実風景画像に重畳表示する親画面表示制御部と、予め撮像された実風景画像である蓄積実風景画像を表示部の子画面に表示し、案内経路から得られ当該蓄積実風景画像上でユーザに提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示する子画面表示制御部とを備え、蓄積実風景画像は、移動体が現在位置よりも進んだ位置で予め撮像された画像である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置、方法及びプログラムに関し、より特定的には、実写画像等に経路オブジェクトを重畳表示するナビゲーション装置、方法及びプログラムに関する。
【背景技術】
【0002】
従来から、車両の前方の映像をビデオカメラ等の撮像手段で取得し、道路の分岐点等の経路案内対象地点に近づくと、取得した前方の映像に車両の進路を示す矢印画像である経路オブジェクトを重畳表示する車載用ナビゲーション装置が提案されている(例えば、特許文献1を参照)。このように実風景画像に経路オブジェクトを重畳した案内画像を表示する車載用ナビゲーション装置によれば、ユーザは実風景と案内画像との対比を取り易いので、ユーザに対して直感的な経路案内を行うことが可能となる。
【特許文献1】特開平7−63572号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記した従来の車載用ナビゲーション装置は、以下に説明する問題を有する。
【0004】
車両の前方映像を撮像するビデオカメラ等の撮像手段は視野角(画角)を有し、この視野角の大きさには限度がある。これは、撮像手段の視野角を大きくしすぎると、前方風景を肉眼で視認する場合と撮像手段が撮像した実風景画像を視認する場合とを比べて、ユーザの距離感覚(遠近感)に隔たりが生じるからである。つまり、広角で撮像された実風景画像には実際の奥行きが表れにくいので、ユーザは実風景と案内画像との対比を取りづらくなるからである。
【0005】
このことから、撮像手段の視野角は、広角にはできない。このため、車両が道路の分岐点に進入する直前において、分岐先の道路が案内画像に映りこまない場合が多い。この結果として、ユーザは案内画像を視ても分岐先の道路を認識することができないので、従来の車載用ナビゲーション装置では、経路案内が困難になるという問題を有している。
【0006】
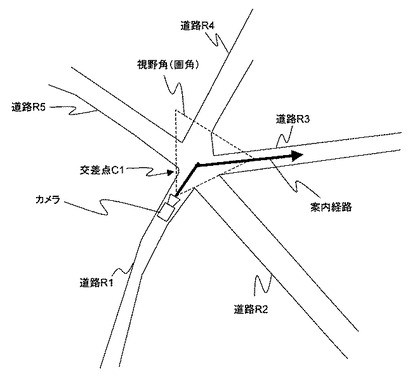
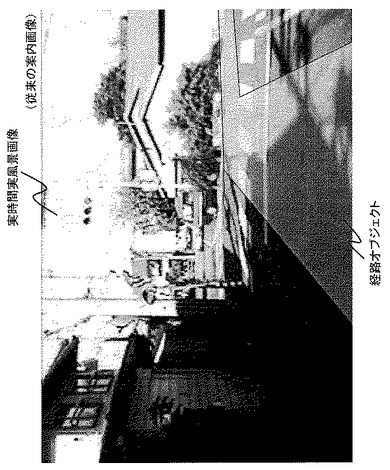
以下に、従来の車載用ナビゲーション装置が有する問題について、図14及び図15を用いて具体的に説明する。図14は、道路R1〜R5が交差する交差点C1を上空から視た模式図である。図14において、カメラを搭載した車両(カメラのみ図示している)は、道路R1から交差点C1に進入する直前の状態である。また、図14において、車両を目的地に案内するための案内経路は、道路R1から道路R3に続く経路である。また、図14には、カメラの視野角を示している。なお、図14は、実際の道路に即して作成したものである。図15は、図14のカメラ位置における、実時間実風景画像に経路オブジェクトが重畳された案内画像を表す図である。ここで、実時間実風景画像とは、カメラが撮像しているリアルタイムの実風景を示す画像である。図15において、経路オブジェクトは、帯形状の部分であり、道路R1から道路R3へ続く案内経路を示している(図14を参照)。図15に示すように、ユーザは、案内画像を視ることによって目前に迫った交差点が分岐点であることは認識できるが、分岐先の道路については認識できない。より具体的には、ユーザは、案内画像を視ることによって、交差点で右折することは認識できるが、図14に示す道路R2と道路R3のいずれが案内経路なのかは認識できない。
【0007】
それ故に本発明の目的は、上記した問題を解決することであり、撮像手段の視野角を広角にすることなく、車両が道路の分岐点に進入する直前においてもユーザが案内画像を視て分岐先の案内経路を認識することができるナビゲーション装置、方法及びプログラムを提供することである。
【課題を解決するための手段】
【0008】
本発明は、移動体に設置された撮像部によって撮像される実風景画像をリアルタイムで表示部に表示し、当該実風景画像に案内経路を示す経路オブジェクトを重畳表示するナビゲーション装置に向けられている。そして、上記目的を達成させるために、本発明のナビゲーション装置は、撮像部が撮像する実風景画像をリアルタイムで表示部の親画面に表示し、案内経路から得られ当該実風景画像上でユーザに提示すべき第1の経路オブジェクトを当該実風景画像に重畳表示する親画面表示制御部と、予め撮像された実風景画像である蓄積実風景画像を表示部の子画面に表示し、案内経路から得られ当該蓄積実風景画像上でユーザに提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示する子画面表示制御部とを備え、蓄積実風景画像は、移動体が現在位置よりも進んだ位置で予め撮像された画像であることを特徴とする。
【0009】
また、好ましくは、蓄積実風景画像は、案内経路における移動体の進行方向に存在する次の分岐点から脱出する時の画像である。
【0010】
また、蓄積実風景画像を蓄積する実風景画像蓄積部と、移動体が分岐点を通過する度に、撮像部が撮像する実風景画像を蓄積実風景画像として実風景画像蓄積部に蓄積させる蓄積制御部とを更に備えてもよい。
【0011】
また、蓄積実風景画像は、静止画像又は動画像である。
【0012】
また、好ましくは、子画面表示制御部は、子画面を、親画面上であって第1の経路オブジェクトと重ならない位置に配置する。
【0013】
また、好ましくは、子画面表示制御部は、子画面を、親画面上であって第1の経路オブジェクトの折れ曲がり先の位置と反対側の位置に配置する。
【0014】
また、好ましくは、子画面表示制御部は、更に、移動体から、案内経路における当該移動体の進行方向に存在する次の分岐点までの距離を検知し、当該検知した距離に応じたタイミングで子画面を表示し、当該検知した距離に応じて子画面の表示サイズを変更する。
【0015】
また、好ましくは、子画面表示制御部は、更に、移動体の走行状態を検知し、子画面表示制御部は、走行状態に応じて子画面に静止画像又は動画像のいずれかの蓄積実風景画像を表示する。
【0016】
ここで、走行状態は、移動体が停止中であるのか移動中であるのかを示す。
【0017】
また、好ましくは、親画面表示制御部は、更に、蓄積実風景画像が撮像された位置を示す撮像位置マークを実風景画像に重畳表示する。
【0018】
また、好ましくは、親画面表示制御部は、更に、撮像位置マークと子画面とを関連付ける引出し線を実風景画像に描画する。
【0019】
また、好ましくは、移動体から案内経路上の各位置までの距離に対応させて、第1の経路オブジェクト及び第2の経路オブジェクトの各部分の視覚効果を、段階的に変化させる。
【0020】
また、本発明は、移動体に設置された撮像部によって撮像される実風景画像をリアルタイムで表示部に表示し、当該実風景画像に案内経路を示す経路オブジェクトを重畳表示するナビゲーション方法にも向けられている。そして、上記目的を達成させるために、本発明のナビゲーション方法は、撮像部が撮像する実風景画像をリアルタイムで表示部の親画面に表示するステップと、案内経路から得られ実風景画像上でユーザに提示すべき第1の経路オブジェクトを当該実風景画像に重畳表示するステップと、予め撮像された実風景画像である蓄積実風景画像を表示部の子画面に表示するステップと、案内経路から得られ蓄積実風景画像上でユーザに提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示するステップとを備え、蓄積実風景画像は、移動体が現在位置よりも進んだ位置で予め撮像された画像である。
【0021】
また、本発明は、移動体に設置された撮像部によって撮像される実風景画像をリアルタイムで表示部に表示し、当該実風景画像に案内経路を示す経路オブジェクトを重畳表示するナビゲーション装置に用いられるプログラムにも向けられている。そして、上記目的を達成させるために、本発明のプログラムは、撮像部が撮像する実風景画像をリアルタイムで表示部の親画面に表示するステップと、案内経路から得られ実風景画像上でユーザに提示すべき第1の経路オブジェクトを当該実風景画像に重畳表示するステップと、予め撮像された実風景画像である蓄積実風景画像を表示部の子画面に表示するステップと、案内経路から得られ蓄積実風景画像上でユーザに提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示するステップとをナビゲーション装置に実行させ、蓄積実風景画像は、移動体が現在位置よりも進んだ位置で予め撮像された画像である。
【0022】
また、本発明は、移動体の運転者が目視する実風景を透過する表示部の有する透過面に、案内経路を示す経路オブジェクトを重畳表示するナビゲーション装置にも向けられている。そして、上記目的を達成させるために、本発明のナビゲーション装置は、案内経路から得られ透過面上で運転者に提示すべき第1の経路オブジェクトを当該透過面に重畳表示する親画面表示制御部と、予め撮像された実風景画像である蓄積実風景画像を透過面の一部の領域に表示し、案内経路から得られ当該蓄積実風景画像上で運転者に提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示する子画面表示制御部とを備え、蓄積実風景画像は、移動体が現在位置よりも進んだ位置で予め撮像された画像である。
【0023】
また、好ましくは、子画面表示制御部は、透過面の一部の領域を、第1の経路オブジェクトと重ならない位置に配置する。
【0024】
また、好ましくは、子画面表示制御部は、透過面の一部の領域を、第1の経路オブジェクトの折れ曲がり先の位置と反対側の位置に配置する。
【0025】
また、本発明は、移動体の運転者が目視する実風景を透過する第1の表示部の有する透過面に、案内経路を示す経路オブジェクトを重畳表示するナビゲーション装置にも向けられている。そして、上記目的を達成させるために、本発明のナビゲーション装置は、案内経路から得られ透過面上で運転者に提示すべき第1の経路オブジェクトを当該透過面に重畳表示する親画面表示制御部と、予め撮像された実風景画像である蓄積実風景画像を第2の表示部に表示し、案内経路から得られ当該蓄積実風景画像上で運転者に提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示する子画面表示制御部とを備え、蓄積実風景画像は、移動体が現在位置よりも進んだ位置で予め撮像された画像である。
【発明の効果】
【0026】
以上に説明したように、本発明のナビゲーション装置、方法及びプログラムによれば、リアルタイムの案内画像(親画像)が表示される親画面内に、車両がこれから進行する位置で予め撮像された案内画像(子画像)が子画面として表示される。このことによって、本発明のナビゲーション装置、方法及びプログラムによれば、撮像部の視野角を広角にすることなく、車両が道路の分岐点に進入する直前においてもユーザが案内画像を視て分岐先の案内経路を認識することができる。この結果として、本発明のナビゲーション装置、方法及びプログラムによれば、ユーザに対して、実風景と案内画面との対比が取り易く安全な経路案内を行うことができる。
【0027】
また、本発明のナビゲーション装置、方法及びプログラムによれば、表示部がウィンドシールドディスプレイ等である場合、表示部の透過面内に、車両がこれから進行する位置で予め撮像された案内画像(子画像)が子画面として表示される。このことによって、本発明のナビゲーション装置、方法及びプログラムによれば、車両が道路の分岐点に進入する前にユーザが案内画像を視て分岐先の案内経路を認識することができる。
【0028】
また、子画面の配置位置は親画面上(又は透過面上)の邪魔にならない位置に配置されるので、視認性に優れた経路案内が可能となる。
【0029】
また、走行状態(分岐点までの距離、案内経路の道路幅)によって子画面のサイズを変更するので、子画面による経路案内の必要性が低いときに、親画面の視認性低下を抑制できる。
【0030】
また、走行状態(車両停止の有無)に応じて子画面に表示する画像を静止画像又は動画像に切替えるので、運転者の運転負荷に応じた経路案内が可能となり、案内経路の視認性と安全性との両立を図ることができる。
【0031】
また、親画面(又は透過面)に蓄積実風景画像撮像時の撮像位置マークを重畳する。更には、親画面(又は透過面)内に表示される蓄積実風景画像と撮像位置マークとを関連付ける引出し線を表示する。これにより、親画面(又は透過面を透過した実風景)と子画面との対応関係の把握がより容易となる。
【発明を実施するための最良の形態】
【0032】
以下に、本発明のナビゲーション装置について、各図面を参照して説明する。なお、各図面において、本発明に関係のない構成要素は、原則として省略する。
【0033】
(本発明の一実施形態)
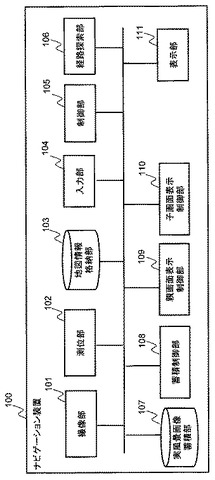
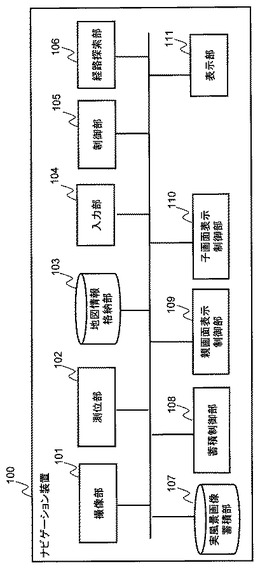
図1は、本発明の一実施形態に係るナビゲーション装置100の構成例を示すブロック図である。図1に示すように、ナビゲーション装置100は、撮像部101と、測位部102と、地図情報格納部103と、入力部104と、制御部105と、経路探索部106と、実風景画像蓄積部107と、蓄積制御部108と、親画面表示制御部109と、子画面表示制御部110と、表示部111とを備える。
【0034】
撮像部101は、例えばビデオカメラであり、車両等の移動体(以下、単に、車両という)の前方の風景を撮像する。撮像部101は、ルームミラー背面のウィンドシールド付近又は車両天井部等に設置される。
【0035】
測位部102は、車両の位置、速度、方位等を測位する。測位部102は、例えば、1つ以上のGNSS(Global Navigation Satellite System)受信機、車速センサ、1つ以上のジャイロ(角速度)センサ、1つ以上の加速度センサ等である。GNSS受信機は、例えば、GPS受信機であり、複数の衛星から電波を受信し、受信した電波を復調することでGPS受信機の絶対位置を計測する。なお、GNSS受信機は、搬送波位相を使用する測位方式(キネマティック測位)を用いるものでもよい。また、現在位置、速度、方位等の測位計算は、GNSS受信機や各種センサを単独又は複合利用して行う。また、測位部102で測位された車両位置に基づいて、後述する地図情報のリンク(道路)に対してマップマッチング処理を行うことができる。
【0036】
地図情報格納部103は、道路や交差点に関するデータ等である地図情報を格納する。地図情報格納部103は、例えば、HDD、DVD、フラッシュメモリ等である。なお、地図情報格納部103は、通信手段(図示しない携帯電話、モバイルWiMAX等)によって、センター設備(図示せず)から地図情報を適宜ダウンロードしてもよい。
【0037】
入力部104には、ユーザからの指示が入力される。入力部104は、例えば、押圧式スイッチを配列した入力装置、タッチパネル、リモコン、ユーザの音声を入力情報に変換する音声認識エンジン等である。ユーザからの指示は、施設や目的地等の検索、経由地設定、目的地設定、経路探索条件(高速道優先等)設定、経路探索実行、案内開始、縮尺変更(拡大/縮小)、表示モードを地図モード又は実写モードに切り替える設定等である。なお、地図モードとは、一般的なナビゲーション装置の地図モードと同様であって地図情報に経路情報等を重畳表示する表示モードである。実写モードとは、経路情報等が風景画像に重畳表示される表示モードである。常に実写モードであっても良いし、自動的に表示モードが切り替わってもよい。
【0038】
制御部105は、ナビゲーション装置100全体の動作を制御する。制御部105は、例えば、CPU又はMPU、ROM(Read Only Memory)及びRAM(Random Access Memory)で構成される。CPU又はMPUは、ROMに格納されるプログラムを実行することによって、図1に示す各機能ブロックの相互連携を実現する。また、CPU又はMPUは、プログラムの実行中、RAMを作業領域として使用する。
【0039】
経路探索部106は、地図情報格納部103に格納された地図情報と測位部102が測位した自車両の位置情報とに基づいて、入力部104に入力された目的地に至る最適経路(案内経路)を探索する。このような経路探索部106の動作は、好ましくは、演算回路がプログラムを実行することによって実現される。探索された最適経路にはいくつかの案内対象の交差点が含まれる。ここで、案内対象の交差点であるか否かの判定は、例えば、ノードに進入するリンクに対する当該ノードから脱出するリンクの角度に基づいて行われる。また、最適経路の探索には、ダイクストラ法、横型探索法等の公知の手法を用いることができ、最適経路は、典型的にはリンクデータ列として表現される。リンクデータ列として保持しておけば、リンクを構成するノードデータ、リンク形状データを取得することができる。なお、ノード及びリンクについては、後に説明する。なお、これには限られず、経路探索部106は、図示しない通信手段(例えば、携帯電話、モバイルWiMAX等)を用いて、経路情報をセンター設備等から適宜ダウンロードする構成としてもよい。
【0040】
実風景画像蓄積部107は、HDD、DVD、フラッシュメモリ等であり、撮像部101によって撮像された車両前方の実風景画像を静止画像又は動画像で蓄積する。詳細なデータ格納レコード形式等については、後に説明する。なお、これには限られず、実風景画像蓄積部107は、図示しない通信手段(例えば、携帯電話、モバイルWiMAX等)を用いて、予め撮像された車両前方の静止画像又は動画像をセンター設備等から適宜ダウンロードしてもよい。これにより、ナビゲーション装置100は、自車両が撮像して蓄積した画像だけではなく、他の車両が撮像した画像も蓄積して利用できる。
【0041】
蓄積制御部108は、実風景画像蓄積部107を制御して、実風景画像蓄積部107に静止画像又は動画像を蓄積させる。このような蓄積制御部108の動作は、好ましくは、演算回路がプログラムを実行することによって実現される。蓄積制御部108の詳細な動作については、後述する。なお、蓄積制御部108は、撮像部101が撮像した車両前方の静止画像又は動画像を、図示しない通信手段によってセンター設備等へアップロードしてもよい。これにより、ナビゲーション装置100は、自車両が撮像した画像を、他の車両に利用させることができる。
【0042】
親画面表示制御部109は、実写モードにおいて、撮像部101が撮像するリアルタイムの実風景画像(以下、実時間実風景画像という)を、親画像として表示部111の親画面に表示する。また、親画面表示制御部109は、実時間実風景画像の撮影条件に基づいて第1の視野空間を設定し、第1の視野空間を用いて実時間実風景画像に第1の経路オブジェクトの重畳を行う。このような親画面表示制御部109の動作は、好ましくは、演算回路がプログラムを実行することによって実現される。また、親画面表示制御部109は、親画面に表示する実時間実風景画像(親画像)上に、後述する子画面に表示する実風景静止画像又は動画像の撮影位置を表す撮像位置マークを重畳表示する機能を有する。親画面表示制御部109の詳細な動作については、後述する。
【0043】
子画面表示制御部110は、実風景画像蓄積部107が蓄積した静止画像又は動画像(以下、蓄積実風景画像という場合がある)を、実写モード時に子画像として子画面に表示する。また、子画面表示制御部110は、蓄積実風景画像の撮像条件に基づいて第2の視野空間を設定し、第2の視野空間を用いて蓄積実風景画像(子画像)に第2の経路オブジェクトの重畳を行う。このような子画面表示制御部110の動作は、好ましくは、演算回路がプログラムを実行することによって実現される。また、子画面表示制御部110は、親画面内であって、親画面に表示される第1の経路オブジェクトの視認を妨げない位置に子画面を配置する機能を有する。また、子画面表示制御部110は、車両の走行状態に応じて子画面を表示するタイミングを変更する機能を有する。また、子画面表示制御部110は、車両の走行状態に応じて、子画面に静止画像又は動画像のいずれを表示するのかを判断して表示する機能を有する。子画面表示制御部110の詳細な動作については、後述する。
【0044】
表示部111は、例えば、液晶ディスプレイ、有機ELディスプレイ等の表示デバイスである。なお、親画面表示制御部109及び子画面表示制御部110は、地図モードにおいて、必要に応じて、自車両位置周辺の地図画像を、自車両位置マークや最適経路情報等と共に表示部111に表示させる機能を有している。
【0045】
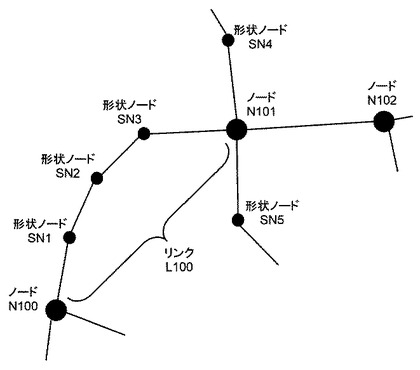
図2は、地図情報格納部103に格納される地図情報を用いて表現された道路ネットワークの一例を示す模式図である。地図情報格納部103に格納される地図情報は、ノード、リンク及び形状ノードのデータで構成される。ここで、ノードとは、交差点や合流地点等の道路が分岐する地点を示す点である。リンクとは、ノードとノードとを結ぶ道路を示す線である。形状ノードとは、曲がった道路形状をリンクで表現するために、リンクの曲折位置を表す点である。図2に示す通り、各ノードには3本以上のリンクが接続し、リンクによってノード同士は結ばれる。リンクL100は、形状ノードSN1〜SN3によって、ノードN100とノードN101とを結ぶ曲がった道路を示している。なお、直線の道路を示すリンク上には、形状ノードは存在しなくともよい。また、ノードが形状ノードを兼ねてもよい。この場合には、各ノードには1本以上のリンクが接続し、ノード同士は例えば5m間隔で高密度に配置される。以下の説明では、ノード及び形状ノードを総称して道路形状点と呼ぶことがある。なお、地図情報格納部103に格納される地図情報には、上記した情報だけではなく、例えば、背景情報(河川、緑地等の位置情報)、ファミリーレストランやガソリンスタンド等の施設位置の情報であるPOI(Point of Interest)情報等も含まれる。
【0046】
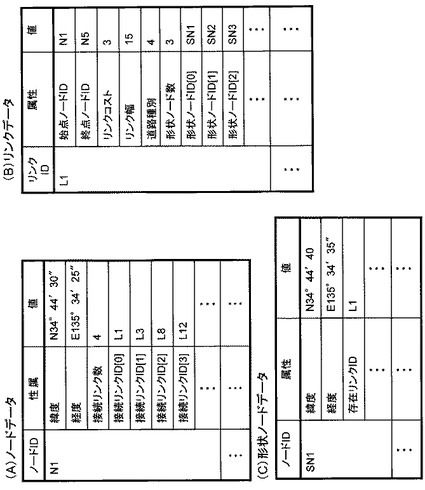
図3は、地図情報格納部103に格納される地図情報であるノードデータ、リンクデータ及び形状ノードデータの記録形式の一例を説明するための図である。図3(A)はノードデータであり、図3(B)はリンクデータであり、図3(C)は形状ノードデータである。以下では、図3を参照して、地図情報格納部103に格納さる地図情報について、説明する。
【0047】
図3(A)に示す通り、ノードデータは、ノードの緯度・経度等の位置情報、ノードに接続するリンクの数、及び接続するリンクのID等で構成される。なお、位置情報は、地図メッシュ(一定の緯度幅、経度幅を持った領域)の四隅のいずれかを始点とする正規化座標で表現されてもよい。
【0048】
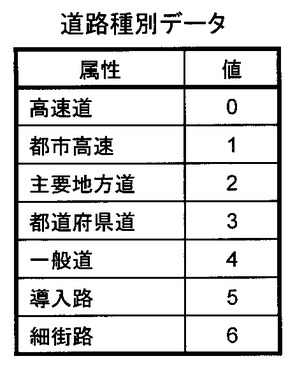
図3(B)に示す通り、リンクデータは、リンクの始点が接続するノードである始点ノード、リンクの終点が接続するノードである終点ノード、リンクコスト(例えば、リンクの距離であり、メートル、キロメートル、フィート等で表現される)、リンク幅(道路幅であり、メートル、フィート等で表現される)、道路種別、当該リンク上に存在する形状ノードの数、及び当該リンク上に存在する形状ノードのID等で構成される。なお、リンクコストは、経路探索部106が経路探索を行う際のコスト計算に用いられる。道路種別のデータは、高速道路や一般道路等の道路の種類を示す情報である。経路探索部106は、道路種別のデータを用いることによって、ユーザが指定した経路探索条件(一般道優先や高速道優先等)に従った経路探索を実行できる。図4に道路種別データの一例を示す。
【0049】
図3(C)に示す通り、形状ノードデータは、ノードの緯度・経度等の位置情報、ノードが存在するリンクのID等で構成される。なお、位置情報は、地図メッシュの四隅のいずれかを始点とする正規化座標で表現されてもよい。
【0050】
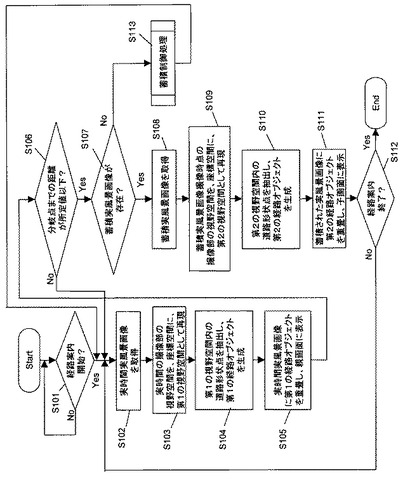
図5は、本発明の一実施形態に係るナビゲーション装置100の動作を説明するためのフローチャートである。以下では、図5を参照して、実写モード時のナビゲーション装置100の動作を説明する。なお、地図モード時のナビゲーション装置100の動作説明は、省略する。
【0051】
まず、ステップS101において、制御部105は、経路案内が開始されるまで待機し、経路案内が開始されるとステップS102に移る。
【0052】
ステップS102において、撮像部101は、車両前方の実風景を撮像してリアルタイムの実風景画像である実時間実風景画像を取得する。
【0053】
次に、ステップS103において、親画面表示制御部109は、現在(実時間風景画像撮像時)の撮像部101の撮像条件(以下、実時間の撮像条件という場合がある)に基づいて、座標空間に、現在の撮像部101の視野空間を第1の視野空間として再現する。ここで、現在の撮像部101の撮像条件とは、現在の撮像部101の位置、撮像方位、撮像範囲(画角)を定めるパラメータである焦点距離、撮像画像サイズ、設置高さ、取付け姿勢(水平角度や仰角等)等である。なお、以下では、撮像部101は、取付け姿勢が水平角度となる姿勢で車両に取付けられているものとして説明する。
【0054】
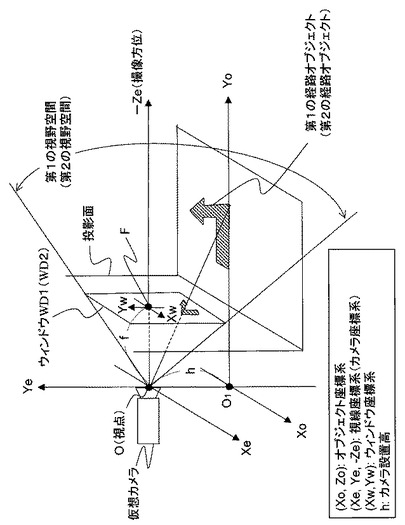
図6は、座標空間に再現された撮像部101の視野空間を説明するための図である。以下、図6を用いて説明する。まず、図6に示すように、Oを原点とする視線座標系(Xe,Ye,−Ze)が定義される。視線座標系(Xe,Ye,−Ze)は、右手座標系である。また、視線座標系の原点OからYe軸方向に距離−hシフトした点O1 を原点とするオブジェクト座標系(Xo,Yo)が定義される。オブジェクト座標系のYo軸は、視線座標系の−Ze軸と平行であり、視線座標系の−Ze軸と同じ方向を向く。オブジェクト座標系のXo軸は、視線座標系のXe軸と平行であり、視線座標系のXe軸と同じ方向を向く。
【0055】
オブジェクト座標系(Xo,Yo)には、地図情報格納部103に格納されている地図情報(道路形状点)が貼付けられる。このとき、地図情報は、測位部102が測位している自車両の現在位置に基づいて、オブジェクト座標系の原点O1 が撮像部101の現在位置に対応する座標に常に位置するように貼付けられる。なお、説明の便宜のために、図6には貼付けられた地図情報は示していない。視線座標系(Xe,Ye,−Ze)の原点Oには、座標空間において撮像部101に相当する仮想カメラが配置される。なお、オブジェクト座標系(Xo,Yo)の原点O1 から視線座標系(Xe,Ye,−Ze)の原点Oまでの距離hは、地面から撮像部101までの距離(高さ)に相当する。視線座標系の−Ze軸方向は、仮想カメラの撮像方位である。そして、地図情報は、仮想カメラの撮像方位と撮像部101の撮像方位とが一致する向きで、オブジェクト座標系に貼付けられる。以上のようにして、親画面表示制御部109は、自車両周辺の道路等と撮像部101との位置関係を、座標空間に再現する。
【0056】
次に、視線座標系(Xe,Ye,−Ze)の原点Oから−Ze軸方向に距離f移動した点Fを原点とするウィンドウ座標系(Xw,Yw)が定義される。ウィンドウ座標系(Xw,Yw)は、−Ze軸に常に直交する平面であるウィンドウWD1を設定する。ウィンドウWD1のサイズは、撮像部101が撮像する実時間実風景画像(親画像)のサイズと等しい。つまり、ウィンドウWD1のサイズは、親画面のサイズと等しい。このことから、距離fは、原点Oを視点としてウィンドウWD1を覗き視ることで定まる仮想カメラの画角と実時間実風景画像を撮像している撮像部101の画角とが等しくなる距離である。以上のようにして、親画面表示制御部109は、撮像部101が撮像する実時間実風景画像によって切取られる平面を、ウィンドウWD1として座標空間に再現する。このことによって、座標空間において原点Oを視点としてウィンドウWD1を覗き視た場合の視野空間(以下、第1の視野空間という)と撮像部101の実時間の視野空間とは、等しくなる。なお、図6において、ウィンドウWD1を含む平面を、投影面と呼んでもよい。
【0057】
以上のようにして、ステップS103において、親画面表示制御部109は、撮像部101の実時間の視野空間を、座標空間に第1の視野空間として再現する。
【0058】
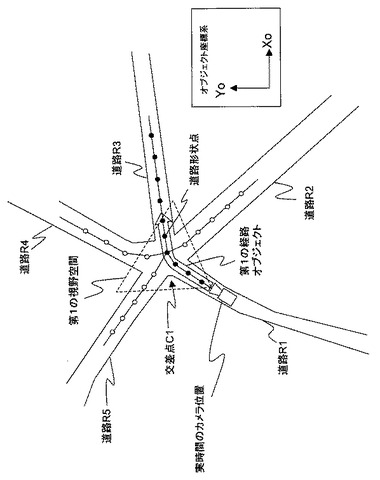
次に、ステップS104において、親画面表示制御部109は、第1の視野空間内に存在する案内経路上の道路形状点を抽出し、図6に示すように、座標空間に第1の経路オブジェクトを生成する。図7は、図6の座標空間を上空から見下ろした様子の一例を説明するための図である。なお、図7に示す道路形状は、図14に示した道路形状と同一である。また、図7では、説明の便宜のために、投影面及びウインドウWD1を省略している。図7に示すように、オブジェクト座標系において、地図情報を構成する道路形状点(図2を用いて説明したノード又は形状ノード)を、丸で示す。また、経路探索部106によって探索された案内経路上の道路形状点は黒丸で示し、他の道路形状点は白丸で示している。図7では、案内経路は、道路R1を直進して交差点C1で右折して道路R3に進入する経路である。
【0059】
親画面表示制御部109は、ステップS104において、経路探索部106によって探索された案内経路上の道路形状点(黒丸)のうち、第1の視野空間内に存在するものを抽出する。その後、図7に示すように、親画面表示制御部109は、抽出した道路形状点と重なり、所定幅を持つ矢印形状の第1の経路オブジェクトを生成する。なお、第1の経路オブジェクトの所定幅は、地図情報格納部103に格納されたリンクデータのリンク幅の情報に基づいて決められてもよい。なお、第1の経路オブジェクトの形状は、矢印図形に限らず、先端の三角形を除いた帯形状、一定の厚みを有する帯形状であってもよく、案内経路を示すことができれば任意の形状であってよい。また、マップマッチングした案内経路上の自車両位置を道路形状点として追加することで、自車両位置を起点とした第1の経路オブジェクトの生成が可能となる。なお、車両の移動と共に第1の視野空間内の道路形状点は、都度抽出される。
【0060】
次に、ステップS105において、親画面表示制御部109は、図6の座標空間において、原点Oを視点として用いて、ウインドウWD1に第1の経路オブジェクトを中心投影する。その後、親画面表示制御部109は、第1の経路オブジェクトが投影されたウインドウWD1を、撮像部101が取得した実時間実風景映像に重畳する。以下に、ステップS105について詳しく説明する。
【0061】
ステップS105において、まず、親画面表示制御部109は、図6の座標空間において、第1の経路オブジェクトを、オブジェクト座標系(Xo,Yo)から視線座標系(Xe,Ye,−Ze)に、式1を用いて変換する。
[数1]
Xe=Xo,Ye=−h,−Ze=Yo・・・(1)
【0062】
次に、親画面表示制御部109は、視線座標系(Xe,Ye,−Ze)で表された第1の経路オブジェクトを、式2を用いて、ウインドウ座標系(Xw,Yw)で示されるウインドウWD1に中心投影する。
[数2]
Xw=fXe/−Ze,Yw=fYe/−Ze・・・(2)
【0063】
以上の処理を行うことによって、親画面表示制御部109は、第1の経路オブジェクトが投影されたウインドウWD1を取得する。その後、親画面表示制御部109は、取得したウインドウWD1を撮像部101が取得した実時間実風景画像に重畳して、第1の経路オブジェクトが重畳された案内画像を作成する。この第1の経路オブジェクトが重畳された案内画像が、親画像であり、この親画像が表示される画面が親画面である。なお、上記の式1及び式2は一例であり、座標系の定義形式及び撮像部101特有のパラメータ等に応じた計算式を用いればよい。
【0064】
次に、ステップS106において、子画面表示制御部110は、自車両から分岐点までの距離が所定値以下になったか否かを判断する。ここで言う分岐点とは、自車両がこれから進入する案内経路上の分岐点である。また、子画面表示制御部110は、測位部102が側位した自車両の位置、地図情報格納部103が格納した地図情報、及び経路探索部106が検索した案内経路の情報等に基づいて、上記した分岐点までの距離を得る。また、上記した所定値は、例えば、700mとすることができる。ステップS106において、分岐点までの距離が所定値以下ではない場合は、ステップS102に戻る。ステップS106において、分岐点までの距離が所定値以下である場合は、ステップS107に移る。つまり、分岐点までの距離が所定値以下になるまでは、ステップS102〜S105までの処理が繰り返される。
【0065】
ステップS107において、蓄積制御部108は、ステップS106の分岐点の実風景画像(蓄積実風景画像)が実風景画像蓄積部107に蓄積されて存在するか否かを判断する。蓄積実風景画像が存在しない場合は、ステップS113に移る。蓄積実風景画像が存在する場合は、ステップS108に移る。ここで、蓄積実風景画像は、静止画像又は動画像である。なお、蓄積実風景画像については、ステップS110の説明で、詳細に説明する。
【0066】
ステップS108において、子画面表示制御部110は、実風景画像蓄積部107から蓄積実風景画像を取得する。
【0067】
次に、ステップS109において、子画面表示制御部110は、蓄積実風景画像が撮像された時点の撮像部101の撮像条件(以下、蓄積実風景画像撮像時の撮像条件という)に基づいて、座標空間に、蓄積実風景画像を撮像した時点の撮像部101の視野空間を第2の視野空間として再現する。ここで、蓄積実風景画像撮像時の撮像条件とは、蓄積実風景画像を撮像した時点の撮像部101の位置、撮像方位、撮像範囲(画角)を定めるパラメータである焦点距離、撮像画像サイズ、設置高さ、取付け姿勢(水平角度や仰角等)等である。子画面表示制御部110は、親画面表示制御部109が座標空間に第1の視野空間を再現する方法(ステップS103及び図6を参照)と同様の方法を用いて、蓄積実風景画像を撮像した時点の撮像部101の視野空間を第2の視野空間として再現する。従って、以下では、図6を流用して第2の視野空間の再現方法について説明する。なお、ステップS103での説明と同様の内容については、原則として説明を省略する。
【0068】
まず、視線座標系(Xe,Ye,−Ze)及びオブジェクト座標系(Xo,Yo)が、ステップS103と同様に定義される。オブジェクト座標系(Xo,Yo)には、地図情報格納部103に格納されている地図情報(道路形状点)が貼付けられる。このとき、地図情報は、オブジェクト座標系の原点O1 が、蓄積実風景画像を撮像した時点の撮像部101の位置に対応する座標に常に位置するように貼付けられる。視線座標系(Xe,Ye,−Ze)の原点Oには、座標空間において、蓄積実風景画像を撮像した時点の撮像部101に相当する仮想カメラが配置される。以上のようにして、子画面表示制御部110は、蓄積実風景画像を撮像した時点における、撮像部101と撮像部101周辺の道路等との位置関係を、座標空間に再現する。
【0069】
次に、ウィンドウ座標系(Xw,Yw)が、ステップS103と同様に定義され、ウィンドウWD2が設定される。ここで、ウィンドウWD2のサイズは、蓄積実風景画像のサイズと等しい。つまり、ウィンドウWD2のサイズは、子画面のサイズと等しい。このことから、図6の距離fは、原点Oを視点としてウィンドウWD2を覗き視ることで定まる仮想カメラの画角と蓄積実風景画像を撮像した撮像部101の画角とが等しくなる距離である。以上のようにして、子画面表示制御部110は、撮像部101が撮像した蓄積実風景画像によって切取られる平面を、ウィンドウWD2として座標空間に再現する。このことによって、座標空間において原点Oを視点としてウィンドウWD2を覗き視た場合の視野空間(以下、第2の視野空間という)と撮像部101が蓄積実風景画像を撮像した時点の視野空間とは、等しくなる。
【0070】
以上のようにして、ステップS109において、子画面表示制御部110は、撮像部101が蓄積実風景画像を撮像した時点の視野空間を、座標空間に第2の視野空間として再現する。
【0071】
次に、ステップS110において、子画面表示制御部110は、第2の視野空間内に存在する案内経路上の道路形状点を抽出し、第2の視野空間を再現した図6に示すように、座標空間に第2の経路オブジェクトを生成する。
【0072】
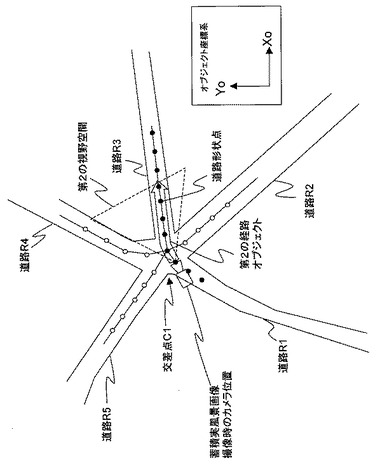
図8は、第2の視野空間を再現した図6の座標空間を上空から見下ろした様子の一例を説明するための図である。なお、図8に示す道路と図7に示す道路とは、同一の道路である。つまり、図8には蓄積実風景画像が撮像された時点(過去の時点)の道路形状が表され、図7には現時点の道路形状が表されている。ここで、蓄積実風景画像を撮像した時点のカメラの位置は、第2の視野空間に、分岐点から脱出する案内経路が入る位置である。具体的には、図8に示すように、蓄積実風景画像を撮像した時点のカメラの位置は、第2の視野空間に、交差点C1から脱出する案内経路である道路R3が入る位置である。このことから、図8に示す蓄積実風景画像を撮像した時点のカメラは、図7に示す実時間のカメラよりも車両前方に位置し、案内経路である道路R3を撮像している。なお、図8では、説明の便宜のために、投影面及びウインドウWD2は省略している。また、図8に示すように、オブジェクト座標系において、地図情報を構成する道路形状点(図2を用いて説明したノード又は形状ノード)を、丸で示す。また、経路探索部106によって探索された案内経路上の道路形状点は黒丸で示し、他の道路形状点は白丸で示している。
【0073】
子画面表示制御部110は、ステップS110において、経路探索部106によって探索された案内経路上の道路形状点(黒丸)のうち、第2の視野空間内に存在するものを抽出する。その後、図8に示すように、子画面表示制御部110は、抽出した道路形状点と重なり、所定幅を持つ矢印形状の第2の経路オブジェクトを生成する。なお、第2の経路オブジェクトの所定幅は、地図情報格納部103に格納されたリンクデータのリンク幅の情報に基づいて決められてもよい。なお、第2の経路オブジェクトの形状は、矢印図形に限らず、先端の三角形を除いた帯形状、一定の厚みを有する帯形状であってもよく、案内経路を示すことができれば任意の形状であってよい。また、マップマッチングした案内経路上の自車両位置を道路形状点として追加することで、自車両位置を起点とた第2の経路オブジェクトの生成が可能となる。
【0074】
次に、ステップS111において、子画面表示制御部110は、ステップS105での処理と同様に(式1)及び(式2)を用いて、第2の視野空間を示す図6の座標空間において、原点Oを視点として用いて、ウインドウWD2に第2の経路オブジェクトを中心投影する。このことによって、子画面表示制御部110は、第2の経路オブジェクトが投影されたウインドウWD2を取得する。その後、子画面表示制御部110は、第2の経路オブジェクトが投影されたウインドウWD2を蓄積実風景画像に重畳して、第2の経路オブジェクトが重畳された案内画像を作成する。この第2の経路オブジェクトが重畳された案内画像が子画像であり、この子画像が表示される画面が子画面である。子画面表示制御部110は、作成した子画像を、表示部111に表示させる。
【0075】
次に、ステップS112において、制御部105は、自車両が目的地付近に到達したことを理由に経路案内を終了するか否かを判定する。経路案内を終了すると判断した場合は、ナビゲーション装置100は、経路案内を終了する。経路案内を終了しないと判断した場合は、ステップS102に戻り、経路案内処理は継続する。
【0076】
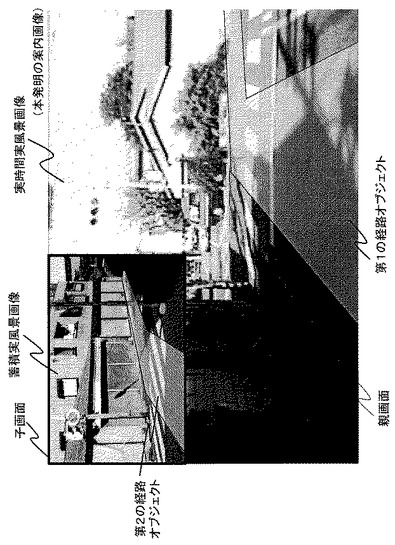
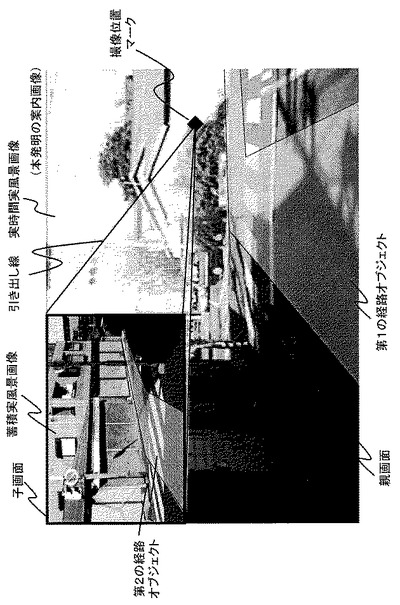
図9は、表示部111が表示する案内画像の一例を示す図である。図9に示すように、親画面表示制御部109が作成した親画像は表示部111の表示画面全体に親画面として表示され、子画面表示制御部110が作成した子画像は親画像上に重ねられて子画面として表示される。また、既に説明したように、親画像は、実時間実風景画像に第1の経路オブジェクトが重畳された案内画像である。また、図9に示す親画像は、図15に示す従来の案内画像と全く同一の条件で撮像されたものである。より具体的には、図9に示す親画像は、図14に示す道路において、図15の従来の案内画像の撮像条件(カメラの位置、方向、画角等)と同一の撮像条件、及び同一の案内経路(道路R1から道路R3に続く経路)の場合の案内画像である(図7及び図14を参照)。また、既に説明したように、子画像は、蓄積実風景画像に第2の経路オブジェクトが重畳された案内画像である。また、図9に示す子画像は、図8に示すように、交差点C1内部から、案内経路である道路R3を撮像した実風景画像である。このように、表示部111が表示する案内画像には、親画像では確認できない分岐先の案内経路である道路R3の実風景画像に、第2の経路オブジェクトが重畳されて、子画像として表示される。このことによって、ナビゲーション装置100によれば、撮像部101の視野角を広角にすることなく、車両が道路の分岐点に進入する直前においてもユーザが案内画像を視て分岐先の案内経路を認識することができる。
【0077】
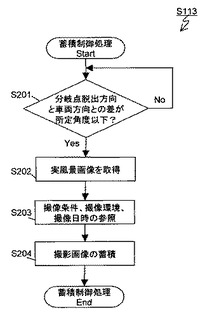
以下では、図5のステップS113において、蓄積制御部108が行う動作について、図10を用いて説明する。図10は、図5のステップS113の蓄積制御処理を詳しく説明するためのフローチャートである。
【0078】
まず、ステップS201において、蓄積制御部108は、ステップS106の分岐点の脱出方向と自車両の方向(撮像部101の撮像方位と同等)との差が所定角度以下になるまで待機する。この所定角度は、撮像部101の視野空間に、分岐点から脱出する案内経路が少なくとも入る角度であり、具体的には、図8に示したカメラの状況となる角度である。なお、この所定角度は、例えば、0〜20度程度の範囲内で任意に設定されるとよい。更には、この所定角度は、分岐点の複雑度(交差する道路の数等)によって、可変としてもよい。所定角度以下になると、ステップS202に移る。
【0079】
ステップS202において、蓄積制御部108は、撮像部101が撮像している実風景画像を、静止画像又は動画像として取得する。
【0080】
次に、ステップS203において、蓄積制御部108は、撮像部101が撮像している実風景画像の撮像条件、撮像環境、撮像日時を参照する。ここで、撮影条件とは、撮像部101の位置、撮像方位、撮像範囲(画角)を定めるパラメータである焦点距離、撮像画像サイズ、設置高さ、取付け姿勢(水平角度や仰角等)等である。この撮像条件は、既に説明したように、図5のステップS109において座標空間に第2の視野空間を再現する際に利用される。撮像環境とは、撮像時の天気や道路の渋滞状況等であり、図示しない通信手段、センサ等を介して取得される。撮像日時は、GPS受信機(測位部102)等から得られる。なお、撮像条件である撮像部101の位置は、地図情報(ノード又はリンク)と対応付けてもよい。
【0081】
次に、ステップS204において、蓄積制御部108は、ステップS202で取得した実風景画像を、ステップS203で参照した撮像条件、撮像環境、撮像日時と関連づけて、実風景画像蓄積部107に蓄積する。
【0082】
図11は、蓄積制御部108が参照する撮像条件、撮像環境、撮像日時のデータレコード形式等を示す図である。これらのデータは、例えば、蓄積制御部108に格納されてもよいし、実風景画像蓄積部107に格納されてもよい。また、これらのデータのうち、第2の視野空間を再現するのに直接関係しないものは、省略してもよい。図11に示す画像IDは、蓄積された画像を識別するためのファイル名等である。また、図11に示す画像先頭アドレスは、蓄積手段(メモリ等)において画像が蓄積されている物理的位置を示すアドレス情報である。このようにして実風景画像を蓄積することによって、図5のステップS108において子画面表示制御部110は、親画像の撮像環境又は/及び撮像日時に近い最適な蓄積実風景画像を取得することが可能となる。例えば、昼間に走行しているために親画像が昼間の画像の場合は、昼間の蓄積風景画像を選択して取得することができる。また、例えば、道路が渋滞している場合には、道路が渋滞しているときの蓄積風景画像を選択して取得することができる。このことによって、ユーザに違和感を与えない子画像を子画面に表示することができる。また、このようにして実風景画像を蓄積することによって、子画面表示制御部110は、図5のステップS109において蓄積実風景画像撮像時の撮像条件を用いて第2の視野空間を正確に再現できるので、図5のステップS111において第2の経路オブジェクトを正確に蓄積実風景画像に重畳できる。
【0083】
以上に説明したように、本発明のナビゲーション装置100は、リアルタイムの案内画像(親画像)が表示される親画面内に、車両がこれから進行する位置で予め撮像された案内画像(子画像)が子画面として表示される。このことによって、本発明のナビゲーション装置100によれば、撮像部101の視野角を広角にすることなく、車両が道路の分岐点に進入する直前においてもユーザが案内画像を視て分岐先の案内経路を認識することができる。この結果として、本発明のナビゲーション装置100によれば、ユーザに対して、実風景と案内画面との対比が取り易く安全な経路案内を行うことができる。
【0084】
なお、以上では、経路オブジェクトの実風景画像への重畳を投影処理を用いて行った(図5のステップS103〜S105、S109〜S111及び図6を参照)。しかし、経路オブジェクトの実風景画像への重畳方法は、これには限られず、他の方法を用いてもよい。
【0085】
また、以上では、第1及び第2の経路オブジェクトは、模様が無く全体が同一色であるものとして説明した(図9を参照)。しかし、自車両から案内経路上の各位置までの距離に対応させて、第1及び第2の経路オブジェクトの各部分の視覚効果を、段階的に変化させてもよい。例えば、第1及び第2の経路オブジェクトの色の濃さを、自車両から案内経路上の各位置までの距離に対応させて、段階的に濃くしてもよい。このことによって、第1の経路オブジェクトにおいて案内経路の近くの位置に対応する部分の色は薄く、案内経路の遠くの位置に対応する部分の色は濃くなり、また、案内経路の遠くの位置に対応する第2の経路オブジェクトの部分の色は濃くなる。この結果として、ユーザは、第1の経路オブジェクトと第2の経路オブジェクトとの連続性を直感的に認識することができる。また、段階的に変化させる視覚効果は、色の濃淡に限らず、色彩、模様、模様の動き等であってもよい。
【0086】
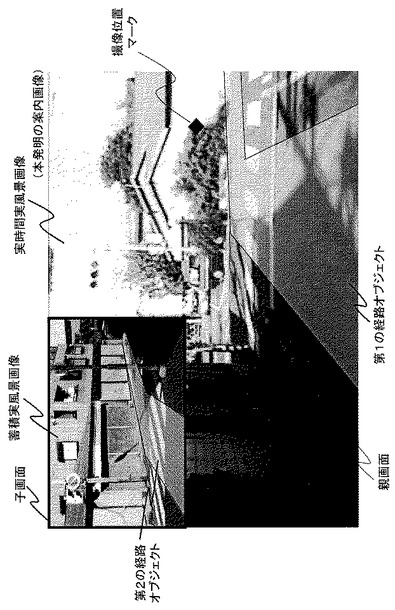
また、親画面表示制御部109は、図12に示すように、親画面に表示する実時間実風景画像上に、子画面に表示する蓄積実風景静止画像の撮影位置を表す撮像位置マークを重畳表示することができる。なお、図12は、表示部111が表示する案内画像の別の例を示す図である。図12において、菱形で示したマークが撮像位置マークである。撮像位置マークは、菱形には限らず、任意のものを使用できる。また、親画面表示制御部109は、更に、図13に示すように、撮像位置マークと子画面とを関連づける引出し線を、親画面に表示してもよい。なお、図13は、表示部111が表示する案内画像の別の例を示す図である。このように、図12及び図13に示すような表示を行うことにより、ユーザは、親画面と子画面との対応関係をより直感的に認識できる。
【0087】
また、子画面表示制御部110は、親画面上の第1の経路オブジェクトの視認を妨げない位置に、子画面の配置位置を配置するのが好ましい。つまり、子画面は、第1の経路オブジェクトと重ならない位置に配置されるのが好ましい。より具体的には、図9に示すように、案内経路の分岐先が右方向である場合には、子画面を親画面上の左側に配置する。逆に案内経路の分岐先が左方向である場合には、子画面を親画面上の右側に配置する。これにより、視認性に優れた経路案内が可能となる。
【0088】
また、子画面表示制御部110は、走行状態に応じて、親画面上に表示される子画面のサイズを変化させてもよい。ここでいう走行状態とは、自車両から案内経路上の次の分岐点までの距離である。例えば、子画面表示制御部110は、案内経路上の次の分岐点に近づくにつれて子画面のサイズを徐々に大きくしてもよい。より具体的には、案内経路上の次の分岐点までの距離が700mのときは子画面のサイズを親画面の1/9程度とし、子画面のサイズを連続的に変化させて、案内経路上の次の分岐点までの距離が0mのときには子画面のサイズを親画面の1/4程度としてもよい。これにより、子画面による経路案内の必要性が低いときには子画面を小さくするので、子画面を表示することによる親画面の視認性低下を抑制することができる。なお、例外的に、子画面サイズを、案内経路上の次の分岐点に近づくにつれて小さくすることもできる。
【0089】
また、子画面表示制御部110は、案内経路の道路幅に応じて、親画面上に表示される子画面のサイズを変化させてもよい。具体的には、子画面表示制御部110は、案内経路の道路幅が大きいときは子画面のサイズを小さくし、案内経路の道路幅が小さいときは子画面のサイズを大きくしてもよい。これにより、親画面の視認性低下を抑制することができる。
【0090】
また、子画面表示制御部110は、走行状態に応じて、子画面に表示する蓄積実風景画像を、静止画像と動画像とで切替えてもよい。ここでいう走行状態とは、自車両が停止中なのか、走行中なのかの状態である。例えば、自車両が交差点の信号待ちで停止しているときは、子画面表示制御部110は、子画面に表示する蓄積実風景画像を動画像とする。この場合、動画像はリピート再生される。逆に、自車両が停止せず交差点に進入するときには、子画面表示制御部110は、子画面に表示する蓄積実風景画像を静止画像とする。これにより、ユーザの運転負荷に応じた経路案内が可能となり、経路案内の認識性と安全性との両立を図ることができる。
【0091】
また、以上では、図5を用いて、自車両が自ら実風景画像を撮像して実風景画像蓄積部107に蓄積し、蓄積した実風景画像を後に利用する場合について、主に説明した。しかし、例えば、蓄積制御部108は、通信手段を用いて自車両の外部のセンター設備等から蓄積実風景画像を取得して、実風景画像蓄積部107に蓄積してもよい。更には、蓄積制御部108は、自車両の撮像部101が撮像した実風景画像を、ナビゲーション装置100を備える他の車両が利用する蓄積実風景画像として、通信手段を用いて自車両の外部のセンター設備等に送信してもよい。このことによって、ナビゲーション装置100は、自車両の撮像部101が撮像した実風景画像に加えて、他の車両の撮像部101が撮像した実風景画像も、蓄積実風景画像として利用できる。
【0092】
また、以上では、図5で説明したように、蓄積制御部108は、経路案内が行われているときにだけ、実風景画像を撮像部101に撮像させて蓄積実風景画像として実風景画像蓄積部107に蓄積した。しかし、蓄積制御部108は、経路案内が行われていないときにも、蓄積実風景画像を蓄積していない分岐点を通過する度に、実風景画像を撮像部101に撮像させて蓄積実風景画像として実風景画像蓄積部107に蓄積してもよい。この場合には、地図情報に撮影ポイント(分岐点)の情報が含まれており、蓄積制御部108は、この撮影ポイントの情報を参照して自動的に蓄積実風景画像を取得することとなる。
【0093】
また、以上では、案内経路を示すオブジェクトである第1及び第2の経路オブジェクトを親画面及び子画面に表示することについて説明した。しかし、第1及び第2の経路オブジェクトに加えて、POI等を案内するオブジェクトを親画面及び子画面に表示してもよい。
【0094】
また、以上では、親画面上に1つの子画面が表示される場合について説明した。しかし、親画面上に表示される子画面は、2つ以上であってもよい。このことによって、例えば、案内経路上の次の分岐点と、その次の分岐点との距離が近接する場合には、1つ目の子画面に次の分岐点についての案内画像を表示し、2つ目の子画面にその次の分岐点についての案内画像を表示することができる。この結果として、ユーザは、案内経路が連続分岐する場合であっても、連続分岐の様子を的確に認識できる。なお、この場合には、1つ目の子画面の案内画像にのみ、経路オブジェクトが表示されてもよい。
【0095】
また、音声報知によって、子画面に表示される画像が蓄積実風景画像である旨のメッセージ等がユーザに報知されてもよい。これにより、ユーザは、どの画像が実時間実風景画像であって、どの画像が蓄積実風景画像であるのかをより容易に認識できる。
【0096】
また、以上では、表示部111が、液晶ディスプレイや有機ELディスプレイ等である場合について説明した。しかし、表示部111は、実風景を透過する透過面を有し、当該透過面を介して運転者に実風景を目視させるウィンドシールドディスプレイやヘッドアップディスプレイ等であってもよい。この場合には、図9に示す親画面は、ヘッドアップディスプレイ等の透過面となり、図9に示すように、この透過面の一部の領域に子画面が表示される。そして、この場合には、ナビゲーション装置100は実時間実風景画像を取得する必要はなく、このことから、図5のステップS102は不要となる。また、親画面表示制御部109は、図5のステップS103において、撮像部101の視野空間を座標空間に再現するのではなく、運転者の視野空間を座標空間に再現する。具体的には、図6の座標空間において、原点Oは、運転者の目の位置に対応する座標に設定される。また、図6の座標空間において、ウインドウWD1は、表示部111の透過面と同形状かつ同サイズの面として設定され、また、運転者が表示部111の透過面を介して実風景を目視するときの視野空間とウインドウWD1を原点O(視点)から視た視野空間とが等しい位置に設定される。また、親画面表示制御部109は、図5のステップS105において、実時間実風景画像にウインドウWD1を重畳するのではなく、表示部111の透過面に、第1の経路オブジェクトが投影されたウインドウWD1を重畳させて表示させる。なお、撮像部101は、図5のステップS113の蓄積制御処理を実行するために用いられる。このようにすることによって、表示部111がウィンドシールドディスプレイやヘッドアップディスプレイ等である場合であっても、ナビゲーション装置100は、上記した効果を得ることができる。
【0097】
また、上記したように、表示部111がウィンドシールドディスプレイやヘッドアップディスプレイ等である場合には、液晶ディスプレイや有機ELディスプレイ等である新たな表示部を別に設けて、この新たな表示部に子画像(第2の経路オブジェクトが重畳された蓄積実風景画像)が表示されてもよい。この場合には、ヘッドアップディスプレイ等の透過面上には、子画面(子画像)は表示されない。
【0098】
また、上記した本発明の一実施形態で説明したナビゲーション装置100は、一般的なコンピュータシステム等の情報処理装置で実現可能である。この場合、以上に説明した処理をコンピュータに実行させるプログラムを所定の情報記録媒体に格納し、当該情報記録媒体に格納されたプログラムをコンピュータが読み出して実行することによって、本発明の一実施形態で説明したナビゲーション装置100が実現される。また、上記プログラムを格納する情報記録媒体は、例えば、ROMまたはフラッシュメモリのような不揮発性半導体メモリやCD−ROM、DVD、あるいはそれらに類する光学式ディスク状記録媒体等である。また、上記プログラムを他の媒体や通信回線を通じて上記情報処理装置に供給してもかまわない。
【0099】
また、上記した実施形態で説明した構成は、単に具体例を示すものであり、本発明の技術的範囲を制限するものではない。また、本発明の効果を奏する範囲において、任意の構成を採用することが可能である。
【産業上の利用可能性】
【0100】
本発明はナビゲーション装置等に利用可能であり、特に、分岐先の案内経路の認識性を大幅に向上させたい場合等に有用である。
【図面の簡単な説明】
【0101】
【図1】本発明の一実施形態に係るナビゲーション装置100の構成例を示すブロック図
【図2】地図情報格納部103に格納される地図情報を用いて表現された道路ネットワークの一例を示す模式図
【図3】地図情報格納部103に格納される地図情報であるノードデータ、リンクデータ及び形状ノードデータの記録形式の一例を説明するための図
【図4】道路種別データの一例を示す図
【図5】本発明の一実施形態に係るナビゲーション装置100の動作を説明するためのフローチャート
【図6】座標空間に再現された撮像部101の視野空間を説明するための図
【図7】本発明の一実施形態に係るナビゲーション装置100の第1の視野空間を再現した図6の座標空間を上空から見下ろした様子の一例を説明するための図
【図8】本発明の一実施形態に係るナビゲーション装置100の第2の視野空間を再現した図6の座標空間を上空から見下ろした様子の一例を説明するための図
【図9】本発明の一実施形態に係るナビゲーション装置100の表示部111が表示する案内画像の一例を示す図
【図10】本発明の一実施形態に係るナビゲーション装置100の図5のステップS113の蓄積制御処理を詳しく説明するためのフローチャート
【図11】本発明の一実施形態に係るナビゲーション装置100の蓄積制御部108が参照する撮像条件、撮像環境、撮像日時のデータレコード形式等を示す図
【図12】本発明の一実施形態に係るナビゲーション装置100の表示部111が表示する案内画像の別の例を示す図
【図13】本発明の一実施形態に係るナビゲーション装置100の表示部111が表示する案内画像の別の例を示す図
【図14】道路R1〜R5が交差する交差点C1を上空から視た模式図
【図15】図14のカメラ位置における、実時間実風景画像に経路オブジェクトが重畳された従来のナビゲーション装置の案内画像を表す図
【符号の説明】
【0102】
100 ナビゲーション装置
101 撮像部
102 測位部
103 地図情報格納部
104 入力部
105 制御部
106 経路探索部
107 実風景画像蓄積部
108 蓄積制御部
109 親画面表示制御部
110 子画面表示制御部
111 表示部
【技術分野】
【0001】
本発明は、ナビゲーション装置、方法及びプログラムに関し、より特定的には、実写画像等に経路オブジェクトを重畳表示するナビゲーション装置、方法及びプログラムに関する。
【背景技術】
【0002】
従来から、車両の前方の映像をビデオカメラ等の撮像手段で取得し、道路の分岐点等の経路案内対象地点に近づくと、取得した前方の映像に車両の進路を示す矢印画像である経路オブジェクトを重畳表示する車載用ナビゲーション装置が提案されている(例えば、特許文献1を参照)。このように実風景画像に経路オブジェクトを重畳した案内画像を表示する車載用ナビゲーション装置によれば、ユーザは実風景と案内画像との対比を取り易いので、ユーザに対して直感的な経路案内を行うことが可能となる。
【特許文献1】特開平7−63572号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記した従来の車載用ナビゲーション装置は、以下に説明する問題を有する。
【0004】
車両の前方映像を撮像するビデオカメラ等の撮像手段は視野角(画角)を有し、この視野角の大きさには限度がある。これは、撮像手段の視野角を大きくしすぎると、前方風景を肉眼で視認する場合と撮像手段が撮像した実風景画像を視認する場合とを比べて、ユーザの距離感覚(遠近感)に隔たりが生じるからである。つまり、広角で撮像された実風景画像には実際の奥行きが表れにくいので、ユーザは実風景と案内画像との対比を取りづらくなるからである。
【0005】
このことから、撮像手段の視野角は、広角にはできない。このため、車両が道路の分岐点に進入する直前において、分岐先の道路が案内画像に映りこまない場合が多い。この結果として、ユーザは案内画像を視ても分岐先の道路を認識することができないので、従来の車載用ナビゲーション装置では、経路案内が困難になるという問題を有している。
【0006】
以下に、従来の車載用ナビゲーション装置が有する問題について、図14及び図15を用いて具体的に説明する。図14は、道路R1〜R5が交差する交差点C1を上空から視た模式図である。図14において、カメラを搭載した車両(カメラのみ図示している)は、道路R1から交差点C1に進入する直前の状態である。また、図14において、車両を目的地に案内するための案内経路は、道路R1から道路R3に続く経路である。また、図14には、カメラの視野角を示している。なお、図14は、実際の道路に即して作成したものである。図15は、図14のカメラ位置における、実時間実風景画像に経路オブジェクトが重畳された案内画像を表す図である。ここで、実時間実風景画像とは、カメラが撮像しているリアルタイムの実風景を示す画像である。図15において、経路オブジェクトは、帯形状の部分であり、道路R1から道路R3へ続く案内経路を示している(図14を参照)。図15に示すように、ユーザは、案内画像を視ることによって目前に迫った交差点が分岐点であることは認識できるが、分岐先の道路については認識できない。より具体的には、ユーザは、案内画像を視ることによって、交差点で右折することは認識できるが、図14に示す道路R2と道路R3のいずれが案内経路なのかは認識できない。
【0007】
それ故に本発明の目的は、上記した問題を解決することであり、撮像手段の視野角を広角にすることなく、車両が道路の分岐点に進入する直前においてもユーザが案内画像を視て分岐先の案内経路を認識することができるナビゲーション装置、方法及びプログラムを提供することである。
【課題を解決するための手段】
【0008】
本発明は、移動体に設置された撮像部によって撮像される実風景画像をリアルタイムで表示部に表示し、当該実風景画像に案内経路を示す経路オブジェクトを重畳表示するナビゲーション装置に向けられている。そして、上記目的を達成させるために、本発明のナビゲーション装置は、撮像部が撮像する実風景画像をリアルタイムで表示部の親画面に表示し、案内経路から得られ当該実風景画像上でユーザに提示すべき第1の経路オブジェクトを当該実風景画像に重畳表示する親画面表示制御部と、予め撮像された実風景画像である蓄積実風景画像を表示部の子画面に表示し、案内経路から得られ当該蓄積実風景画像上でユーザに提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示する子画面表示制御部とを備え、蓄積実風景画像は、移動体が現在位置よりも進んだ位置で予め撮像された画像であることを特徴とする。
【0009】
また、好ましくは、蓄積実風景画像は、案内経路における移動体の進行方向に存在する次の分岐点から脱出する時の画像である。
【0010】
また、蓄積実風景画像を蓄積する実風景画像蓄積部と、移動体が分岐点を通過する度に、撮像部が撮像する実風景画像を蓄積実風景画像として実風景画像蓄積部に蓄積させる蓄積制御部とを更に備えてもよい。
【0011】
また、蓄積実風景画像は、静止画像又は動画像である。
【0012】
また、好ましくは、子画面表示制御部は、子画面を、親画面上であって第1の経路オブジェクトと重ならない位置に配置する。
【0013】
また、好ましくは、子画面表示制御部は、子画面を、親画面上であって第1の経路オブジェクトの折れ曲がり先の位置と反対側の位置に配置する。
【0014】
また、好ましくは、子画面表示制御部は、更に、移動体から、案内経路における当該移動体の進行方向に存在する次の分岐点までの距離を検知し、当該検知した距離に応じたタイミングで子画面を表示し、当該検知した距離に応じて子画面の表示サイズを変更する。
【0015】
また、好ましくは、子画面表示制御部は、更に、移動体の走行状態を検知し、子画面表示制御部は、走行状態に応じて子画面に静止画像又は動画像のいずれかの蓄積実風景画像を表示する。
【0016】
ここで、走行状態は、移動体が停止中であるのか移動中であるのかを示す。
【0017】
また、好ましくは、親画面表示制御部は、更に、蓄積実風景画像が撮像された位置を示す撮像位置マークを実風景画像に重畳表示する。
【0018】
また、好ましくは、親画面表示制御部は、更に、撮像位置マークと子画面とを関連付ける引出し線を実風景画像に描画する。
【0019】
また、好ましくは、移動体から案内経路上の各位置までの距離に対応させて、第1の経路オブジェクト及び第2の経路オブジェクトの各部分の視覚効果を、段階的に変化させる。
【0020】
また、本発明は、移動体に設置された撮像部によって撮像される実風景画像をリアルタイムで表示部に表示し、当該実風景画像に案内経路を示す経路オブジェクトを重畳表示するナビゲーション方法にも向けられている。そして、上記目的を達成させるために、本発明のナビゲーション方法は、撮像部が撮像する実風景画像をリアルタイムで表示部の親画面に表示するステップと、案内経路から得られ実風景画像上でユーザに提示すべき第1の経路オブジェクトを当該実風景画像に重畳表示するステップと、予め撮像された実風景画像である蓄積実風景画像を表示部の子画面に表示するステップと、案内経路から得られ蓄積実風景画像上でユーザに提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示するステップとを備え、蓄積実風景画像は、移動体が現在位置よりも進んだ位置で予め撮像された画像である。
【0021】
また、本発明は、移動体に設置された撮像部によって撮像される実風景画像をリアルタイムで表示部に表示し、当該実風景画像に案内経路を示す経路オブジェクトを重畳表示するナビゲーション装置に用いられるプログラムにも向けられている。そして、上記目的を達成させるために、本発明のプログラムは、撮像部が撮像する実風景画像をリアルタイムで表示部の親画面に表示するステップと、案内経路から得られ実風景画像上でユーザに提示すべき第1の経路オブジェクトを当該実風景画像に重畳表示するステップと、予め撮像された実風景画像である蓄積実風景画像を表示部の子画面に表示するステップと、案内経路から得られ蓄積実風景画像上でユーザに提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示するステップとをナビゲーション装置に実行させ、蓄積実風景画像は、移動体が現在位置よりも進んだ位置で予め撮像された画像である。
【0022】
また、本発明は、移動体の運転者が目視する実風景を透過する表示部の有する透過面に、案内経路を示す経路オブジェクトを重畳表示するナビゲーション装置にも向けられている。そして、上記目的を達成させるために、本発明のナビゲーション装置は、案内経路から得られ透過面上で運転者に提示すべき第1の経路オブジェクトを当該透過面に重畳表示する親画面表示制御部と、予め撮像された実風景画像である蓄積実風景画像を透過面の一部の領域に表示し、案内経路から得られ当該蓄積実風景画像上で運転者に提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示する子画面表示制御部とを備え、蓄積実風景画像は、移動体が現在位置よりも進んだ位置で予め撮像された画像である。
【0023】
また、好ましくは、子画面表示制御部は、透過面の一部の領域を、第1の経路オブジェクトと重ならない位置に配置する。
【0024】
また、好ましくは、子画面表示制御部は、透過面の一部の領域を、第1の経路オブジェクトの折れ曲がり先の位置と反対側の位置に配置する。
【0025】
また、本発明は、移動体の運転者が目視する実風景を透過する第1の表示部の有する透過面に、案内経路を示す経路オブジェクトを重畳表示するナビゲーション装置にも向けられている。そして、上記目的を達成させるために、本発明のナビゲーション装置は、案内経路から得られ透過面上で運転者に提示すべき第1の経路オブジェクトを当該透過面に重畳表示する親画面表示制御部と、予め撮像された実風景画像である蓄積実風景画像を第2の表示部に表示し、案内経路から得られ当該蓄積実風景画像上で運転者に提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示する子画面表示制御部とを備え、蓄積実風景画像は、移動体が現在位置よりも進んだ位置で予め撮像された画像である。
【発明の効果】
【0026】
以上に説明したように、本発明のナビゲーション装置、方法及びプログラムによれば、リアルタイムの案内画像(親画像)が表示される親画面内に、車両がこれから進行する位置で予め撮像された案内画像(子画像)が子画面として表示される。このことによって、本発明のナビゲーション装置、方法及びプログラムによれば、撮像部の視野角を広角にすることなく、車両が道路の分岐点に進入する直前においてもユーザが案内画像を視て分岐先の案内経路を認識することができる。この結果として、本発明のナビゲーション装置、方法及びプログラムによれば、ユーザに対して、実風景と案内画面との対比が取り易く安全な経路案内を行うことができる。
【0027】
また、本発明のナビゲーション装置、方法及びプログラムによれば、表示部がウィンドシールドディスプレイ等である場合、表示部の透過面内に、車両がこれから進行する位置で予め撮像された案内画像(子画像)が子画面として表示される。このことによって、本発明のナビゲーション装置、方法及びプログラムによれば、車両が道路の分岐点に進入する前にユーザが案内画像を視て分岐先の案内経路を認識することができる。
【0028】
また、子画面の配置位置は親画面上(又は透過面上)の邪魔にならない位置に配置されるので、視認性に優れた経路案内が可能となる。
【0029】
また、走行状態(分岐点までの距離、案内経路の道路幅)によって子画面のサイズを変更するので、子画面による経路案内の必要性が低いときに、親画面の視認性低下を抑制できる。
【0030】
また、走行状態(車両停止の有無)に応じて子画面に表示する画像を静止画像又は動画像に切替えるので、運転者の運転負荷に応じた経路案内が可能となり、案内経路の視認性と安全性との両立を図ることができる。
【0031】
また、親画面(又は透過面)に蓄積実風景画像撮像時の撮像位置マークを重畳する。更には、親画面(又は透過面)内に表示される蓄積実風景画像と撮像位置マークとを関連付ける引出し線を表示する。これにより、親画面(又は透過面を透過した実風景)と子画面との対応関係の把握がより容易となる。
【発明を実施するための最良の形態】
【0032】
以下に、本発明のナビゲーション装置について、各図面を参照して説明する。なお、各図面において、本発明に関係のない構成要素は、原則として省略する。
【0033】
(本発明の一実施形態)
図1は、本発明の一実施形態に係るナビゲーション装置100の構成例を示すブロック図である。図1に示すように、ナビゲーション装置100は、撮像部101と、測位部102と、地図情報格納部103と、入力部104と、制御部105と、経路探索部106と、実風景画像蓄積部107と、蓄積制御部108と、親画面表示制御部109と、子画面表示制御部110と、表示部111とを備える。
【0034】
撮像部101は、例えばビデオカメラであり、車両等の移動体(以下、単に、車両という)の前方の風景を撮像する。撮像部101は、ルームミラー背面のウィンドシールド付近又は車両天井部等に設置される。
【0035】
測位部102は、車両の位置、速度、方位等を測位する。測位部102は、例えば、1つ以上のGNSS(Global Navigation Satellite System)受信機、車速センサ、1つ以上のジャイロ(角速度)センサ、1つ以上の加速度センサ等である。GNSS受信機は、例えば、GPS受信機であり、複数の衛星から電波を受信し、受信した電波を復調することでGPS受信機の絶対位置を計測する。なお、GNSS受信機は、搬送波位相を使用する測位方式(キネマティック測位)を用いるものでもよい。また、現在位置、速度、方位等の測位計算は、GNSS受信機や各種センサを単独又は複合利用して行う。また、測位部102で測位された車両位置に基づいて、後述する地図情報のリンク(道路)に対してマップマッチング処理を行うことができる。
【0036】
地図情報格納部103は、道路や交差点に関するデータ等である地図情報を格納する。地図情報格納部103は、例えば、HDD、DVD、フラッシュメモリ等である。なお、地図情報格納部103は、通信手段(図示しない携帯電話、モバイルWiMAX等)によって、センター設備(図示せず)から地図情報を適宜ダウンロードしてもよい。
【0037】
入力部104には、ユーザからの指示が入力される。入力部104は、例えば、押圧式スイッチを配列した入力装置、タッチパネル、リモコン、ユーザの音声を入力情報に変換する音声認識エンジン等である。ユーザからの指示は、施設や目的地等の検索、経由地設定、目的地設定、経路探索条件(高速道優先等)設定、経路探索実行、案内開始、縮尺変更(拡大/縮小)、表示モードを地図モード又は実写モードに切り替える設定等である。なお、地図モードとは、一般的なナビゲーション装置の地図モードと同様であって地図情報に経路情報等を重畳表示する表示モードである。実写モードとは、経路情報等が風景画像に重畳表示される表示モードである。常に実写モードであっても良いし、自動的に表示モードが切り替わってもよい。
【0038】
制御部105は、ナビゲーション装置100全体の動作を制御する。制御部105は、例えば、CPU又はMPU、ROM(Read Only Memory)及びRAM(Random Access Memory)で構成される。CPU又はMPUは、ROMに格納されるプログラムを実行することによって、図1に示す各機能ブロックの相互連携を実現する。また、CPU又はMPUは、プログラムの実行中、RAMを作業領域として使用する。
【0039】
経路探索部106は、地図情報格納部103に格納された地図情報と測位部102が測位した自車両の位置情報とに基づいて、入力部104に入力された目的地に至る最適経路(案内経路)を探索する。このような経路探索部106の動作は、好ましくは、演算回路がプログラムを実行することによって実現される。探索された最適経路にはいくつかの案内対象の交差点が含まれる。ここで、案内対象の交差点であるか否かの判定は、例えば、ノードに進入するリンクに対する当該ノードから脱出するリンクの角度に基づいて行われる。また、最適経路の探索には、ダイクストラ法、横型探索法等の公知の手法を用いることができ、最適経路は、典型的にはリンクデータ列として表現される。リンクデータ列として保持しておけば、リンクを構成するノードデータ、リンク形状データを取得することができる。なお、ノード及びリンクについては、後に説明する。なお、これには限られず、経路探索部106は、図示しない通信手段(例えば、携帯電話、モバイルWiMAX等)を用いて、経路情報をセンター設備等から適宜ダウンロードする構成としてもよい。
【0040】
実風景画像蓄積部107は、HDD、DVD、フラッシュメモリ等であり、撮像部101によって撮像された車両前方の実風景画像を静止画像又は動画像で蓄積する。詳細なデータ格納レコード形式等については、後に説明する。なお、これには限られず、実風景画像蓄積部107は、図示しない通信手段(例えば、携帯電話、モバイルWiMAX等)を用いて、予め撮像された車両前方の静止画像又は動画像をセンター設備等から適宜ダウンロードしてもよい。これにより、ナビゲーション装置100は、自車両が撮像して蓄積した画像だけではなく、他の車両が撮像した画像も蓄積して利用できる。
【0041】
蓄積制御部108は、実風景画像蓄積部107を制御して、実風景画像蓄積部107に静止画像又は動画像を蓄積させる。このような蓄積制御部108の動作は、好ましくは、演算回路がプログラムを実行することによって実現される。蓄積制御部108の詳細な動作については、後述する。なお、蓄積制御部108は、撮像部101が撮像した車両前方の静止画像又は動画像を、図示しない通信手段によってセンター設備等へアップロードしてもよい。これにより、ナビゲーション装置100は、自車両が撮像した画像を、他の車両に利用させることができる。
【0042】
親画面表示制御部109は、実写モードにおいて、撮像部101が撮像するリアルタイムの実風景画像(以下、実時間実風景画像という)を、親画像として表示部111の親画面に表示する。また、親画面表示制御部109は、実時間実風景画像の撮影条件に基づいて第1の視野空間を設定し、第1の視野空間を用いて実時間実風景画像に第1の経路オブジェクトの重畳を行う。このような親画面表示制御部109の動作は、好ましくは、演算回路がプログラムを実行することによって実現される。また、親画面表示制御部109は、親画面に表示する実時間実風景画像(親画像)上に、後述する子画面に表示する実風景静止画像又は動画像の撮影位置を表す撮像位置マークを重畳表示する機能を有する。親画面表示制御部109の詳細な動作については、後述する。
【0043】
子画面表示制御部110は、実風景画像蓄積部107が蓄積した静止画像又は動画像(以下、蓄積実風景画像という場合がある)を、実写モード時に子画像として子画面に表示する。また、子画面表示制御部110は、蓄積実風景画像の撮像条件に基づいて第2の視野空間を設定し、第2の視野空間を用いて蓄積実風景画像(子画像)に第2の経路オブジェクトの重畳を行う。このような子画面表示制御部110の動作は、好ましくは、演算回路がプログラムを実行することによって実現される。また、子画面表示制御部110は、親画面内であって、親画面に表示される第1の経路オブジェクトの視認を妨げない位置に子画面を配置する機能を有する。また、子画面表示制御部110は、車両の走行状態に応じて子画面を表示するタイミングを変更する機能を有する。また、子画面表示制御部110は、車両の走行状態に応じて、子画面に静止画像又は動画像のいずれを表示するのかを判断して表示する機能を有する。子画面表示制御部110の詳細な動作については、後述する。
【0044】
表示部111は、例えば、液晶ディスプレイ、有機ELディスプレイ等の表示デバイスである。なお、親画面表示制御部109及び子画面表示制御部110は、地図モードにおいて、必要に応じて、自車両位置周辺の地図画像を、自車両位置マークや最適経路情報等と共に表示部111に表示させる機能を有している。
【0045】
図2は、地図情報格納部103に格納される地図情報を用いて表現された道路ネットワークの一例を示す模式図である。地図情報格納部103に格納される地図情報は、ノード、リンク及び形状ノードのデータで構成される。ここで、ノードとは、交差点や合流地点等の道路が分岐する地点を示す点である。リンクとは、ノードとノードとを結ぶ道路を示す線である。形状ノードとは、曲がった道路形状をリンクで表現するために、リンクの曲折位置を表す点である。図2に示す通り、各ノードには3本以上のリンクが接続し、リンクによってノード同士は結ばれる。リンクL100は、形状ノードSN1〜SN3によって、ノードN100とノードN101とを結ぶ曲がった道路を示している。なお、直線の道路を示すリンク上には、形状ノードは存在しなくともよい。また、ノードが形状ノードを兼ねてもよい。この場合には、各ノードには1本以上のリンクが接続し、ノード同士は例えば5m間隔で高密度に配置される。以下の説明では、ノード及び形状ノードを総称して道路形状点と呼ぶことがある。なお、地図情報格納部103に格納される地図情報には、上記した情報だけではなく、例えば、背景情報(河川、緑地等の位置情報)、ファミリーレストランやガソリンスタンド等の施設位置の情報であるPOI(Point of Interest)情報等も含まれる。
【0046】
図3は、地図情報格納部103に格納される地図情報であるノードデータ、リンクデータ及び形状ノードデータの記録形式の一例を説明するための図である。図3(A)はノードデータであり、図3(B)はリンクデータであり、図3(C)は形状ノードデータである。以下では、図3を参照して、地図情報格納部103に格納さる地図情報について、説明する。
【0047】
図3(A)に示す通り、ノードデータは、ノードの緯度・経度等の位置情報、ノードに接続するリンクの数、及び接続するリンクのID等で構成される。なお、位置情報は、地図メッシュ(一定の緯度幅、経度幅を持った領域)の四隅のいずれかを始点とする正規化座標で表現されてもよい。
【0048】
図3(B)に示す通り、リンクデータは、リンクの始点が接続するノードである始点ノード、リンクの終点が接続するノードである終点ノード、リンクコスト(例えば、リンクの距離であり、メートル、キロメートル、フィート等で表現される)、リンク幅(道路幅であり、メートル、フィート等で表現される)、道路種別、当該リンク上に存在する形状ノードの数、及び当該リンク上に存在する形状ノードのID等で構成される。なお、リンクコストは、経路探索部106が経路探索を行う際のコスト計算に用いられる。道路種別のデータは、高速道路や一般道路等の道路の種類を示す情報である。経路探索部106は、道路種別のデータを用いることによって、ユーザが指定した経路探索条件(一般道優先や高速道優先等)に従った経路探索を実行できる。図4に道路種別データの一例を示す。
【0049】
図3(C)に示す通り、形状ノードデータは、ノードの緯度・経度等の位置情報、ノードが存在するリンクのID等で構成される。なお、位置情報は、地図メッシュの四隅のいずれかを始点とする正規化座標で表現されてもよい。
【0050】
図5は、本発明の一実施形態に係るナビゲーション装置100の動作を説明するためのフローチャートである。以下では、図5を参照して、実写モード時のナビゲーション装置100の動作を説明する。なお、地図モード時のナビゲーション装置100の動作説明は、省略する。
【0051】
まず、ステップS101において、制御部105は、経路案内が開始されるまで待機し、経路案内が開始されるとステップS102に移る。
【0052】
ステップS102において、撮像部101は、車両前方の実風景を撮像してリアルタイムの実風景画像である実時間実風景画像を取得する。
【0053】
次に、ステップS103において、親画面表示制御部109は、現在(実時間風景画像撮像時)の撮像部101の撮像条件(以下、実時間の撮像条件という場合がある)に基づいて、座標空間に、現在の撮像部101の視野空間を第1の視野空間として再現する。ここで、現在の撮像部101の撮像条件とは、現在の撮像部101の位置、撮像方位、撮像範囲(画角)を定めるパラメータである焦点距離、撮像画像サイズ、設置高さ、取付け姿勢(水平角度や仰角等)等である。なお、以下では、撮像部101は、取付け姿勢が水平角度となる姿勢で車両に取付けられているものとして説明する。
【0054】
図6は、座標空間に再現された撮像部101の視野空間を説明するための図である。以下、図6を用いて説明する。まず、図6に示すように、Oを原点とする視線座標系(Xe,Ye,−Ze)が定義される。視線座標系(Xe,Ye,−Ze)は、右手座標系である。また、視線座標系の原点OからYe軸方向に距離−hシフトした点O1 を原点とするオブジェクト座標系(Xo,Yo)が定義される。オブジェクト座標系のYo軸は、視線座標系の−Ze軸と平行であり、視線座標系の−Ze軸と同じ方向を向く。オブジェクト座標系のXo軸は、視線座標系のXe軸と平行であり、視線座標系のXe軸と同じ方向を向く。
【0055】
オブジェクト座標系(Xo,Yo)には、地図情報格納部103に格納されている地図情報(道路形状点)が貼付けられる。このとき、地図情報は、測位部102が測位している自車両の現在位置に基づいて、オブジェクト座標系の原点O1 が撮像部101の現在位置に対応する座標に常に位置するように貼付けられる。なお、説明の便宜のために、図6には貼付けられた地図情報は示していない。視線座標系(Xe,Ye,−Ze)の原点Oには、座標空間において撮像部101に相当する仮想カメラが配置される。なお、オブジェクト座標系(Xo,Yo)の原点O1 から視線座標系(Xe,Ye,−Ze)の原点Oまでの距離hは、地面から撮像部101までの距離(高さ)に相当する。視線座標系の−Ze軸方向は、仮想カメラの撮像方位である。そして、地図情報は、仮想カメラの撮像方位と撮像部101の撮像方位とが一致する向きで、オブジェクト座標系に貼付けられる。以上のようにして、親画面表示制御部109は、自車両周辺の道路等と撮像部101との位置関係を、座標空間に再現する。
【0056】
次に、視線座標系(Xe,Ye,−Ze)の原点Oから−Ze軸方向に距離f移動した点Fを原点とするウィンドウ座標系(Xw,Yw)が定義される。ウィンドウ座標系(Xw,Yw)は、−Ze軸に常に直交する平面であるウィンドウWD1を設定する。ウィンドウWD1のサイズは、撮像部101が撮像する実時間実風景画像(親画像)のサイズと等しい。つまり、ウィンドウWD1のサイズは、親画面のサイズと等しい。このことから、距離fは、原点Oを視点としてウィンドウWD1を覗き視ることで定まる仮想カメラの画角と実時間実風景画像を撮像している撮像部101の画角とが等しくなる距離である。以上のようにして、親画面表示制御部109は、撮像部101が撮像する実時間実風景画像によって切取られる平面を、ウィンドウWD1として座標空間に再現する。このことによって、座標空間において原点Oを視点としてウィンドウWD1を覗き視た場合の視野空間(以下、第1の視野空間という)と撮像部101の実時間の視野空間とは、等しくなる。なお、図6において、ウィンドウWD1を含む平面を、投影面と呼んでもよい。
【0057】
以上のようにして、ステップS103において、親画面表示制御部109は、撮像部101の実時間の視野空間を、座標空間に第1の視野空間として再現する。
【0058】
次に、ステップS104において、親画面表示制御部109は、第1の視野空間内に存在する案内経路上の道路形状点を抽出し、図6に示すように、座標空間に第1の経路オブジェクトを生成する。図7は、図6の座標空間を上空から見下ろした様子の一例を説明するための図である。なお、図7に示す道路形状は、図14に示した道路形状と同一である。また、図7では、説明の便宜のために、投影面及びウインドウWD1を省略している。図7に示すように、オブジェクト座標系において、地図情報を構成する道路形状点(図2を用いて説明したノード又は形状ノード)を、丸で示す。また、経路探索部106によって探索された案内経路上の道路形状点は黒丸で示し、他の道路形状点は白丸で示している。図7では、案内経路は、道路R1を直進して交差点C1で右折して道路R3に進入する経路である。
【0059】
親画面表示制御部109は、ステップS104において、経路探索部106によって探索された案内経路上の道路形状点(黒丸)のうち、第1の視野空間内に存在するものを抽出する。その後、図7に示すように、親画面表示制御部109は、抽出した道路形状点と重なり、所定幅を持つ矢印形状の第1の経路オブジェクトを生成する。なお、第1の経路オブジェクトの所定幅は、地図情報格納部103に格納されたリンクデータのリンク幅の情報に基づいて決められてもよい。なお、第1の経路オブジェクトの形状は、矢印図形に限らず、先端の三角形を除いた帯形状、一定の厚みを有する帯形状であってもよく、案内経路を示すことができれば任意の形状であってよい。また、マップマッチングした案内経路上の自車両位置を道路形状点として追加することで、自車両位置を起点とした第1の経路オブジェクトの生成が可能となる。なお、車両の移動と共に第1の視野空間内の道路形状点は、都度抽出される。
【0060】
次に、ステップS105において、親画面表示制御部109は、図6の座標空間において、原点Oを視点として用いて、ウインドウWD1に第1の経路オブジェクトを中心投影する。その後、親画面表示制御部109は、第1の経路オブジェクトが投影されたウインドウWD1を、撮像部101が取得した実時間実風景映像に重畳する。以下に、ステップS105について詳しく説明する。
【0061】
ステップS105において、まず、親画面表示制御部109は、図6の座標空間において、第1の経路オブジェクトを、オブジェクト座標系(Xo,Yo)から視線座標系(Xe,Ye,−Ze)に、式1を用いて変換する。
[数1]
Xe=Xo,Ye=−h,−Ze=Yo・・・(1)
【0062】
次に、親画面表示制御部109は、視線座標系(Xe,Ye,−Ze)で表された第1の経路オブジェクトを、式2を用いて、ウインドウ座標系(Xw,Yw)で示されるウインドウWD1に中心投影する。
[数2]
Xw=fXe/−Ze,Yw=fYe/−Ze・・・(2)
【0063】
以上の処理を行うことによって、親画面表示制御部109は、第1の経路オブジェクトが投影されたウインドウWD1を取得する。その後、親画面表示制御部109は、取得したウインドウWD1を撮像部101が取得した実時間実風景画像に重畳して、第1の経路オブジェクトが重畳された案内画像を作成する。この第1の経路オブジェクトが重畳された案内画像が、親画像であり、この親画像が表示される画面が親画面である。なお、上記の式1及び式2は一例であり、座標系の定義形式及び撮像部101特有のパラメータ等に応じた計算式を用いればよい。
【0064】
次に、ステップS106において、子画面表示制御部110は、自車両から分岐点までの距離が所定値以下になったか否かを判断する。ここで言う分岐点とは、自車両がこれから進入する案内経路上の分岐点である。また、子画面表示制御部110は、測位部102が側位した自車両の位置、地図情報格納部103が格納した地図情報、及び経路探索部106が検索した案内経路の情報等に基づいて、上記した分岐点までの距離を得る。また、上記した所定値は、例えば、700mとすることができる。ステップS106において、分岐点までの距離が所定値以下ではない場合は、ステップS102に戻る。ステップS106において、分岐点までの距離が所定値以下である場合は、ステップS107に移る。つまり、分岐点までの距離が所定値以下になるまでは、ステップS102〜S105までの処理が繰り返される。
【0065】
ステップS107において、蓄積制御部108は、ステップS106の分岐点の実風景画像(蓄積実風景画像)が実風景画像蓄積部107に蓄積されて存在するか否かを判断する。蓄積実風景画像が存在しない場合は、ステップS113に移る。蓄積実風景画像が存在する場合は、ステップS108に移る。ここで、蓄積実風景画像は、静止画像又は動画像である。なお、蓄積実風景画像については、ステップS110の説明で、詳細に説明する。
【0066】
ステップS108において、子画面表示制御部110は、実風景画像蓄積部107から蓄積実風景画像を取得する。
【0067】
次に、ステップS109において、子画面表示制御部110は、蓄積実風景画像が撮像された時点の撮像部101の撮像条件(以下、蓄積実風景画像撮像時の撮像条件という)に基づいて、座標空間に、蓄積実風景画像を撮像した時点の撮像部101の視野空間を第2の視野空間として再現する。ここで、蓄積実風景画像撮像時の撮像条件とは、蓄積実風景画像を撮像した時点の撮像部101の位置、撮像方位、撮像範囲(画角)を定めるパラメータである焦点距離、撮像画像サイズ、設置高さ、取付け姿勢(水平角度や仰角等)等である。子画面表示制御部110は、親画面表示制御部109が座標空間に第1の視野空間を再現する方法(ステップS103及び図6を参照)と同様の方法を用いて、蓄積実風景画像を撮像した時点の撮像部101の視野空間を第2の視野空間として再現する。従って、以下では、図6を流用して第2の視野空間の再現方法について説明する。なお、ステップS103での説明と同様の内容については、原則として説明を省略する。
【0068】
まず、視線座標系(Xe,Ye,−Ze)及びオブジェクト座標系(Xo,Yo)が、ステップS103と同様に定義される。オブジェクト座標系(Xo,Yo)には、地図情報格納部103に格納されている地図情報(道路形状点)が貼付けられる。このとき、地図情報は、オブジェクト座標系の原点O1 が、蓄積実風景画像を撮像した時点の撮像部101の位置に対応する座標に常に位置するように貼付けられる。視線座標系(Xe,Ye,−Ze)の原点Oには、座標空間において、蓄積実風景画像を撮像した時点の撮像部101に相当する仮想カメラが配置される。以上のようにして、子画面表示制御部110は、蓄積実風景画像を撮像した時点における、撮像部101と撮像部101周辺の道路等との位置関係を、座標空間に再現する。
【0069】
次に、ウィンドウ座標系(Xw,Yw)が、ステップS103と同様に定義され、ウィンドウWD2が設定される。ここで、ウィンドウWD2のサイズは、蓄積実風景画像のサイズと等しい。つまり、ウィンドウWD2のサイズは、子画面のサイズと等しい。このことから、図6の距離fは、原点Oを視点としてウィンドウWD2を覗き視ることで定まる仮想カメラの画角と蓄積実風景画像を撮像した撮像部101の画角とが等しくなる距離である。以上のようにして、子画面表示制御部110は、撮像部101が撮像した蓄積実風景画像によって切取られる平面を、ウィンドウWD2として座標空間に再現する。このことによって、座標空間において原点Oを視点としてウィンドウWD2を覗き視た場合の視野空間(以下、第2の視野空間という)と撮像部101が蓄積実風景画像を撮像した時点の視野空間とは、等しくなる。
【0070】
以上のようにして、ステップS109において、子画面表示制御部110は、撮像部101が蓄積実風景画像を撮像した時点の視野空間を、座標空間に第2の視野空間として再現する。
【0071】
次に、ステップS110において、子画面表示制御部110は、第2の視野空間内に存在する案内経路上の道路形状点を抽出し、第2の視野空間を再現した図6に示すように、座標空間に第2の経路オブジェクトを生成する。
【0072】
図8は、第2の視野空間を再現した図6の座標空間を上空から見下ろした様子の一例を説明するための図である。なお、図8に示す道路と図7に示す道路とは、同一の道路である。つまり、図8には蓄積実風景画像が撮像された時点(過去の時点)の道路形状が表され、図7には現時点の道路形状が表されている。ここで、蓄積実風景画像を撮像した時点のカメラの位置は、第2の視野空間に、分岐点から脱出する案内経路が入る位置である。具体的には、図8に示すように、蓄積実風景画像を撮像した時点のカメラの位置は、第2の視野空間に、交差点C1から脱出する案内経路である道路R3が入る位置である。このことから、図8に示す蓄積実風景画像を撮像した時点のカメラは、図7に示す実時間のカメラよりも車両前方に位置し、案内経路である道路R3を撮像している。なお、図8では、説明の便宜のために、投影面及びウインドウWD2は省略している。また、図8に示すように、オブジェクト座標系において、地図情報を構成する道路形状点(図2を用いて説明したノード又は形状ノード)を、丸で示す。また、経路探索部106によって探索された案内経路上の道路形状点は黒丸で示し、他の道路形状点は白丸で示している。
【0073】
子画面表示制御部110は、ステップS110において、経路探索部106によって探索された案内経路上の道路形状点(黒丸)のうち、第2の視野空間内に存在するものを抽出する。その後、図8に示すように、子画面表示制御部110は、抽出した道路形状点と重なり、所定幅を持つ矢印形状の第2の経路オブジェクトを生成する。なお、第2の経路オブジェクトの所定幅は、地図情報格納部103に格納されたリンクデータのリンク幅の情報に基づいて決められてもよい。なお、第2の経路オブジェクトの形状は、矢印図形に限らず、先端の三角形を除いた帯形状、一定の厚みを有する帯形状であってもよく、案内経路を示すことができれば任意の形状であってよい。また、マップマッチングした案内経路上の自車両位置を道路形状点として追加することで、自車両位置を起点とた第2の経路オブジェクトの生成が可能となる。
【0074】
次に、ステップS111において、子画面表示制御部110は、ステップS105での処理と同様に(式1)及び(式2)を用いて、第2の視野空間を示す図6の座標空間において、原点Oを視点として用いて、ウインドウWD2に第2の経路オブジェクトを中心投影する。このことによって、子画面表示制御部110は、第2の経路オブジェクトが投影されたウインドウWD2を取得する。その後、子画面表示制御部110は、第2の経路オブジェクトが投影されたウインドウWD2を蓄積実風景画像に重畳して、第2の経路オブジェクトが重畳された案内画像を作成する。この第2の経路オブジェクトが重畳された案内画像が子画像であり、この子画像が表示される画面が子画面である。子画面表示制御部110は、作成した子画像を、表示部111に表示させる。
【0075】
次に、ステップS112において、制御部105は、自車両が目的地付近に到達したことを理由に経路案内を終了するか否かを判定する。経路案内を終了すると判断した場合は、ナビゲーション装置100は、経路案内を終了する。経路案内を終了しないと判断した場合は、ステップS102に戻り、経路案内処理は継続する。
【0076】
図9は、表示部111が表示する案内画像の一例を示す図である。図9に示すように、親画面表示制御部109が作成した親画像は表示部111の表示画面全体に親画面として表示され、子画面表示制御部110が作成した子画像は親画像上に重ねられて子画面として表示される。また、既に説明したように、親画像は、実時間実風景画像に第1の経路オブジェクトが重畳された案内画像である。また、図9に示す親画像は、図15に示す従来の案内画像と全く同一の条件で撮像されたものである。より具体的には、図9に示す親画像は、図14に示す道路において、図15の従来の案内画像の撮像条件(カメラの位置、方向、画角等)と同一の撮像条件、及び同一の案内経路(道路R1から道路R3に続く経路)の場合の案内画像である(図7及び図14を参照)。また、既に説明したように、子画像は、蓄積実風景画像に第2の経路オブジェクトが重畳された案内画像である。また、図9に示す子画像は、図8に示すように、交差点C1内部から、案内経路である道路R3を撮像した実風景画像である。このように、表示部111が表示する案内画像には、親画像では確認できない分岐先の案内経路である道路R3の実風景画像に、第2の経路オブジェクトが重畳されて、子画像として表示される。このことによって、ナビゲーション装置100によれば、撮像部101の視野角を広角にすることなく、車両が道路の分岐点に進入する直前においてもユーザが案内画像を視て分岐先の案内経路を認識することができる。
【0077】
以下では、図5のステップS113において、蓄積制御部108が行う動作について、図10を用いて説明する。図10は、図5のステップS113の蓄積制御処理を詳しく説明するためのフローチャートである。
【0078】
まず、ステップS201において、蓄積制御部108は、ステップS106の分岐点の脱出方向と自車両の方向(撮像部101の撮像方位と同等)との差が所定角度以下になるまで待機する。この所定角度は、撮像部101の視野空間に、分岐点から脱出する案内経路が少なくとも入る角度であり、具体的には、図8に示したカメラの状況となる角度である。なお、この所定角度は、例えば、0〜20度程度の範囲内で任意に設定されるとよい。更には、この所定角度は、分岐点の複雑度(交差する道路の数等)によって、可変としてもよい。所定角度以下になると、ステップS202に移る。
【0079】
ステップS202において、蓄積制御部108は、撮像部101が撮像している実風景画像を、静止画像又は動画像として取得する。
【0080】
次に、ステップS203において、蓄積制御部108は、撮像部101が撮像している実風景画像の撮像条件、撮像環境、撮像日時を参照する。ここで、撮影条件とは、撮像部101の位置、撮像方位、撮像範囲(画角)を定めるパラメータである焦点距離、撮像画像サイズ、設置高さ、取付け姿勢(水平角度や仰角等)等である。この撮像条件は、既に説明したように、図5のステップS109において座標空間に第2の視野空間を再現する際に利用される。撮像環境とは、撮像時の天気や道路の渋滞状況等であり、図示しない通信手段、センサ等を介して取得される。撮像日時は、GPS受信機(測位部102)等から得られる。なお、撮像条件である撮像部101の位置は、地図情報(ノード又はリンク)と対応付けてもよい。
【0081】
次に、ステップS204において、蓄積制御部108は、ステップS202で取得した実風景画像を、ステップS203で参照した撮像条件、撮像環境、撮像日時と関連づけて、実風景画像蓄積部107に蓄積する。
【0082】
図11は、蓄積制御部108が参照する撮像条件、撮像環境、撮像日時のデータレコード形式等を示す図である。これらのデータは、例えば、蓄積制御部108に格納されてもよいし、実風景画像蓄積部107に格納されてもよい。また、これらのデータのうち、第2の視野空間を再現するのに直接関係しないものは、省略してもよい。図11に示す画像IDは、蓄積された画像を識別するためのファイル名等である。また、図11に示す画像先頭アドレスは、蓄積手段(メモリ等)において画像が蓄積されている物理的位置を示すアドレス情報である。このようにして実風景画像を蓄積することによって、図5のステップS108において子画面表示制御部110は、親画像の撮像環境又は/及び撮像日時に近い最適な蓄積実風景画像を取得することが可能となる。例えば、昼間に走行しているために親画像が昼間の画像の場合は、昼間の蓄積風景画像を選択して取得することができる。また、例えば、道路が渋滞している場合には、道路が渋滞しているときの蓄積風景画像を選択して取得することができる。このことによって、ユーザに違和感を与えない子画像を子画面に表示することができる。また、このようにして実風景画像を蓄積することによって、子画面表示制御部110は、図5のステップS109において蓄積実風景画像撮像時の撮像条件を用いて第2の視野空間を正確に再現できるので、図5のステップS111において第2の経路オブジェクトを正確に蓄積実風景画像に重畳できる。
【0083】
以上に説明したように、本発明のナビゲーション装置100は、リアルタイムの案内画像(親画像)が表示される親画面内に、車両がこれから進行する位置で予め撮像された案内画像(子画像)が子画面として表示される。このことによって、本発明のナビゲーション装置100によれば、撮像部101の視野角を広角にすることなく、車両が道路の分岐点に進入する直前においてもユーザが案内画像を視て分岐先の案内経路を認識することができる。この結果として、本発明のナビゲーション装置100によれば、ユーザに対して、実風景と案内画面との対比が取り易く安全な経路案内を行うことができる。
【0084】
なお、以上では、経路オブジェクトの実風景画像への重畳を投影処理を用いて行った(図5のステップS103〜S105、S109〜S111及び図6を参照)。しかし、経路オブジェクトの実風景画像への重畳方法は、これには限られず、他の方法を用いてもよい。
【0085】
また、以上では、第1及び第2の経路オブジェクトは、模様が無く全体が同一色であるものとして説明した(図9を参照)。しかし、自車両から案内経路上の各位置までの距離に対応させて、第1及び第2の経路オブジェクトの各部分の視覚効果を、段階的に変化させてもよい。例えば、第1及び第2の経路オブジェクトの色の濃さを、自車両から案内経路上の各位置までの距離に対応させて、段階的に濃くしてもよい。このことによって、第1の経路オブジェクトにおいて案内経路の近くの位置に対応する部分の色は薄く、案内経路の遠くの位置に対応する部分の色は濃くなり、また、案内経路の遠くの位置に対応する第2の経路オブジェクトの部分の色は濃くなる。この結果として、ユーザは、第1の経路オブジェクトと第2の経路オブジェクトとの連続性を直感的に認識することができる。また、段階的に変化させる視覚効果は、色の濃淡に限らず、色彩、模様、模様の動き等であってもよい。
【0086】
また、親画面表示制御部109は、図12に示すように、親画面に表示する実時間実風景画像上に、子画面に表示する蓄積実風景静止画像の撮影位置を表す撮像位置マークを重畳表示することができる。なお、図12は、表示部111が表示する案内画像の別の例を示す図である。図12において、菱形で示したマークが撮像位置マークである。撮像位置マークは、菱形には限らず、任意のものを使用できる。また、親画面表示制御部109は、更に、図13に示すように、撮像位置マークと子画面とを関連づける引出し線を、親画面に表示してもよい。なお、図13は、表示部111が表示する案内画像の別の例を示す図である。このように、図12及び図13に示すような表示を行うことにより、ユーザは、親画面と子画面との対応関係をより直感的に認識できる。
【0087】
また、子画面表示制御部110は、親画面上の第1の経路オブジェクトの視認を妨げない位置に、子画面の配置位置を配置するのが好ましい。つまり、子画面は、第1の経路オブジェクトと重ならない位置に配置されるのが好ましい。より具体的には、図9に示すように、案内経路の分岐先が右方向である場合には、子画面を親画面上の左側に配置する。逆に案内経路の分岐先が左方向である場合には、子画面を親画面上の右側に配置する。これにより、視認性に優れた経路案内が可能となる。
【0088】
また、子画面表示制御部110は、走行状態に応じて、親画面上に表示される子画面のサイズを変化させてもよい。ここでいう走行状態とは、自車両から案内経路上の次の分岐点までの距離である。例えば、子画面表示制御部110は、案内経路上の次の分岐点に近づくにつれて子画面のサイズを徐々に大きくしてもよい。より具体的には、案内経路上の次の分岐点までの距離が700mのときは子画面のサイズを親画面の1/9程度とし、子画面のサイズを連続的に変化させて、案内経路上の次の分岐点までの距離が0mのときには子画面のサイズを親画面の1/4程度としてもよい。これにより、子画面による経路案内の必要性が低いときには子画面を小さくするので、子画面を表示することによる親画面の視認性低下を抑制することができる。なお、例外的に、子画面サイズを、案内経路上の次の分岐点に近づくにつれて小さくすることもできる。
【0089】
また、子画面表示制御部110は、案内経路の道路幅に応じて、親画面上に表示される子画面のサイズを変化させてもよい。具体的には、子画面表示制御部110は、案内経路の道路幅が大きいときは子画面のサイズを小さくし、案内経路の道路幅が小さいときは子画面のサイズを大きくしてもよい。これにより、親画面の視認性低下を抑制することができる。
【0090】
また、子画面表示制御部110は、走行状態に応じて、子画面に表示する蓄積実風景画像を、静止画像と動画像とで切替えてもよい。ここでいう走行状態とは、自車両が停止中なのか、走行中なのかの状態である。例えば、自車両が交差点の信号待ちで停止しているときは、子画面表示制御部110は、子画面に表示する蓄積実風景画像を動画像とする。この場合、動画像はリピート再生される。逆に、自車両が停止せず交差点に進入するときには、子画面表示制御部110は、子画面に表示する蓄積実風景画像を静止画像とする。これにより、ユーザの運転負荷に応じた経路案内が可能となり、経路案内の認識性と安全性との両立を図ることができる。
【0091】
また、以上では、図5を用いて、自車両が自ら実風景画像を撮像して実風景画像蓄積部107に蓄積し、蓄積した実風景画像を後に利用する場合について、主に説明した。しかし、例えば、蓄積制御部108は、通信手段を用いて自車両の外部のセンター設備等から蓄積実風景画像を取得して、実風景画像蓄積部107に蓄積してもよい。更には、蓄積制御部108は、自車両の撮像部101が撮像した実風景画像を、ナビゲーション装置100を備える他の車両が利用する蓄積実風景画像として、通信手段を用いて自車両の外部のセンター設備等に送信してもよい。このことによって、ナビゲーション装置100は、自車両の撮像部101が撮像した実風景画像に加えて、他の車両の撮像部101が撮像した実風景画像も、蓄積実風景画像として利用できる。
【0092】
また、以上では、図5で説明したように、蓄積制御部108は、経路案内が行われているときにだけ、実風景画像を撮像部101に撮像させて蓄積実風景画像として実風景画像蓄積部107に蓄積した。しかし、蓄積制御部108は、経路案内が行われていないときにも、蓄積実風景画像を蓄積していない分岐点を通過する度に、実風景画像を撮像部101に撮像させて蓄積実風景画像として実風景画像蓄積部107に蓄積してもよい。この場合には、地図情報に撮影ポイント(分岐点)の情報が含まれており、蓄積制御部108は、この撮影ポイントの情報を参照して自動的に蓄積実風景画像を取得することとなる。
【0093】
また、以上では、案内経路を示すオブジェクトである第1及び第2の経路オブジェクトを親画面及び子画面に表示することについて説明した。しかし、第1及び第2の経路オブジェクトに加えて、POI等を案内するオブジェクトを親画面及び子画面に表示してもよい。
【0094】
また、以上では、親画面上に1つの子画面が表示される場合について説明した。しかし、親画面上に表示される子画面は、2つ以上であってもよい。このことによって、例えば、案内経路上の次の分岐点と、その次の分岐点との距離が近接する場合には、1つ目の子画面に次の分岐点についての案内画像を表示し、2つ目の子画面にその次の分岐点についての案内画像を表示することができる。この結果として、ユーザは、案内経路が連続分岐する場合であっても、連続分岐の様子を的確に認識できる。なお、この場合には、1つ目の子画面の案内画像にのみ、経路オブジェクトが表示されてもよい。
【0095】
また、音声報知によって、子画面に表示される画像が蓄積実風景画像である旨のメッセージ等がユーザに報知されてもよい。これにより、ユーザは、どの画像が実時間実風景画像であって、どの画像が蓄積実風景画像であるのかをより容易に認識できる。
【0096】
また、以上では、表示部111が、液晶ディスプレイや有機ELディスプレイ等である場合について説明した。しかし、表示部111は、実風景を透過する透過面を有し、当該透過面を介して運転者に実風景を目視させるウィンドシールドディスプレイやヘッドアップディスプレイ等であってもよい。この場合には、図9に示す親画面は、ヘッドアップディスプレイ等の透過面となり、図9に示すように、この透過面の一部の領域に子画面が表示される。そして、この場合には、ナビゲーション装置100は実時間実風景画像を取得する必要はなく、このことから、図5のステップS102は不要となる。また、親画面表示制御部109は、図5のステップS103において、撮像部101の視野空間を座標空間に再現するのではなく、運転者の視野空間を座標空間に再現する。具体的には、図6の座標空間において、原点Oは、運転者の目の位置に対応する座標に設定される。また、図6の座標空間において、ウインドウWD1は、表示部111の透過面と同形状かつ同サイズの面として設定され、また、運転者が表示部111の透過面を介して実風景を目視するときの視野空間とウインドウWD1を原点O(視点)から視た視野空間とが等しい位置に設定される。また、親画面表示制御部109は、図5のステップS105において、実時間実風景画像にウインドウWD1を重畳するのではなく、表示部111の透過面に、第1の経路オブジェクトが投影されたウインドウWD1を重畳させて表示させる。なお、撮像部101は、図5のステップS113の蓄積制御処理を実行するために用いられる。このようにすることによって、表示部111がウィンドシールドディスプレイやヘッドアップディスプレイ等である場合であっても、ナビゲーション装置100は、上記した効果を得ることができる。
【0097】
また、上記したように、表示部111がウィンドシールドディスプレイやヘッドアップディスプレイ等である場合には、液晶ディスプレイや有機ELディスプレイ等である新たな表示部を別に設けて、この新たな表示部に子画像(第2の経路オブジェクトが重畳された蓄積実風景画像)が表示されてもよい。この場合には、ヘッドアップディスプレイ等の透過面上には、子画面(子画像)は表示されない。
【0098】
また、上記した本発明の一実施形態で説明したナビゲーション装置100は、一般的なコンピュータシステム等の情報処理装置で実現可能である。この場合、以上に説明した処理をコンピュータに実行させるプログラムを所定の情報記録媒体に格納し、当該情報記録媒体に格納されたプログラムをコンピュータが読み出して実行することによって、本発明の一実施形態で説明したナビゲーション装置100が実現される。また、上記プログラムを格納する情報記録媒体は、例えば、ROMまたはフラッシュメモリのような不揮発性半導体メモリやCD−ROM、DVD、あるいはそれらに類する光学式ディスク状記録媒体等である。また、上記プログラムを他の媒体や通信回線を通じて上記情報処理装置に供給してもかまわない。
【0099】
また、上記した実施形態で説明した構成は、単に具体例を示すものであり、本発明の技術的範囲を制限するものではない。また、本発明の効果を奏する範囲において、任意の構成を採用することが可能である。
【産業上の利用可能性】
【0100】
本発明はナビゲーション装置等に利用可能であり、特に、分岐先の案内経路の認識性を大幅に向上させたい場合等に有用である。
【図面の簡単な説明】
【0101】
【図1】本発明の一実施形態に係るナビゲーション装置100の構成例を示すブロック図
【図2】地図情報格納部103に格納される地図情報を用いて表現された道路ネットワークの一例を示す模式図
【図3】地図情報格納部103に格納される地図情報であるノードデータ、リンクデータ及び形状ノードデータの記録形式の一例を説明するための図
【図4】道路種別データの一例を示す図
【図5】本発明の一実施形態に係るナビゲーション装置100の動作を説明するためのフローチャート
【図6】座標空間に再現された撮像部101の視野空間を説明するための図
【図7】本発明の一実施形態に係るナビゲーション装置100の第1の視野空間を再現した図6の座標空間を上空から見下ろした様子の一例を説明するための図
【図8】本発明の一実施形態に係るナビゲーション装置100の第2の視野空間を再現した図6の座標空間を上空から見下ろした様子の一例を説明するための図
【図9】本発明の一実施形態に係るナビゲーション装置100の表示部111が表示する案内画像の一例を示す図
【図10】本発明の一実施形態に係るナビゲーション装置100の図5のステップS113の蓄積制御処理を詳しく説明するためのフローチャート
【図11】本発明の一実施形態に係るナビゲーション装置100の蓄積制御部108が参照する撮像条件、撮像環境、撮像日時のデータレコード形式等を示す図
【図12】本発明の一実施形態に係るナビゲーション装置100の表示部111が表示する案内画像の別の例を示す図
【図13】本発明の一実施形態に係るナビゲーション装置100の表示部111が表示する案内画像の別の例を示す図
【図14】道路R1〜R5が交差する交差点C1を上空から視た模式図
【図15】図14のカメラ位置における、実時間実風景画像に経路オブジェクトが重畳された従来のナビゲーション装置の案内画像を表す図
【符号の説明】
【0102】
100 ナビゲーション装置
101 撮像部
102 測位部
103 地図情報格納部
104 入力部
105 制御部
106 経路探索部
107 実風景画像蓄積部
108 蓄積制御部
109 親画面表示制御部
110 子画面表示制御部
111 表示部
【特許請求の範囲】
【請求項1】
移動体に設置された撮像部によって撮像される実風景画像をリアルタイムで表示部に表示し、当該実風景画像に案内経路を示す経路オブジェクトを重畳表示するナビゲーション装置であって、
前記撮像部が撮像する実風景画像をリアルタイムで前記表示部の親画面に表示し、前記案内経路から得られ当該実風景画像上でユーザに提示すべき第1の経路オブジェクトを当該実風景画像に重畳表示する親画面表示制御部と、
予め撮像された実風景画像である蓄積実風景画像を前記表示部の子画面に表示し、前記案内経路から得られ当該蓄積実風景画像上で前記ユーザに提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示する子画面表示制御部とを備え、
前記蓄積実風景画像は、前記移動体が現在位置よりも進んだ位置で予め撮像された画像であることを特徴とする、ナビゲーション装置。
【請求項2】
前記蓄積実風景画像は、前記案内経路における前記移動体の進行方向に存在する次の分岐点から脱出する時の画像であることを特徴とする、請求項1に記載のナビゲーション装置。
【請求項3】
前記蓄積実風景画像を蓄積する実風景画像蓄積部と、
前記移動体が分岐点を通過する度に、前記撮像部が撮像する実風景画像を前記蓄積実風景画像として前記実風景画像蓄積部に蓄積させる蓄積制御部とを更に備えることを特徴とする、請求2に記載のナビゲーション装置。
【請求項4】
前記蓄積実風景画像は、静止画像又は動画像であることを特徴とする、請求項1に記載のナビゲーション装置。
【請求項5】
前記子画面表示制御部は、前記子画面を、前記親画面上であって前記第1の経路オブジェクトと重ならない位置に配置することを特徴とする、請求項1に記載のナビゲーション装置。
【請求項6】
前記子画面表示制御部は、前記子画面を、前記親画面上であって前記第1の経路オブジェクトの折れ曲がり先の位置と反対側の位置に配置することを特徴とする、請求項5に記載のナビゲーション装置。
【請求項7】
前記子画面表示制御部は、更に、前記移動体から、前記案内経路における当該移動体の進行方向に存在する次の分岐点までの距離を検知し、当該検知した距離に応じたタイミングで前記子画面を表示し、当該検知した距離に応じて前記子画面の表示サイズを変更することを特徴とする、請求項1に記載のナビゲーション装置。
【請求項8】
前記子画面表示制御部は、更に、前記移動体の走行状態を検知し、
前記子画面表示制御部は、前記走行状態に応じて前記子画面に前記静止画像又は前記動画像のいずれかの前記蓄積実風景画像を表示することを特徴とする、請求項4に記載のナビゲーション装置。
【請求項9】
前記走行状態は、前記移動体が停止中であるのか移動中であるのかを示すことを特徴とする、請求項8に記載のナビゲーション装置。
【請求項10】
前記親画面表示制御部は、更に、前記蓄積実風景画像が撮像された位置を示す撮像位置マークを前記実風景画像に重畳表示することを特徴とする、請求項1に記載のナビゲーション装置。
【請求項11】
前記親画面表示制御部は、更に、前記撮像位置マークと前記子画面とを関連付ける引出し線を前記実風景画像に描画することを特徴とする、請求項10に記載のナビゲーション装置。
【請求項12】
前記移動体から前記案内経路上の各位置までの距離に対応させて、前記第1の経路オブジェクト及び前記第2の経路オブジェクトの各部分の視覚効果を、段階的に変化させることを特徴とする、請求項1に記載のナビゲーション装置。
【請求項13】
移動体に設置された撮像部によって撮像される実風景画像をリアルタイムで表示部に表示し、当該実風景画像に案内経路を示す経路オブジェクトを重畳表示するナビゲーション方法であって、
前記撮像部が撮像する実風景画像をリアルタイムで前記表示部の親画面に表示するステップと、
前記案内経路から得られ前記実風景画像上でユーザに提示すべき第1の経路オブジェクトを当該実風景画像に重畳表示するステップと、
予め撮像された実風景画像である蓄積実風景画像を前記表示部の子画面に表示するステップと、
前記案内経路から得られ前記蓄積実風景画像上で前記ユーザに提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示するステップとを備え、
前記蓄積実風景画像は、前記移動体が現在位置よりも進んだ位置で予め撮像された画像であることを特徴とする、ナビゲーション方法。
【請求項14】
移動体に設置された撮像部によって撮像される実風景画像をリアルタイムで表示部に表示し、当該実風景画像に案内経路を示す経路オブジェクトを重畳表示するナビゲーション装置に用いられるプログラムであって、
前記撮像部が撮像する実風景画像をリアルタイムで前記表示部の親画面に表示するステップと、
前記案内経路から得られ前記実風景画像上でユーザに提示すべき第1の経路オブジェクトを当該実風景画像に重畳表示するステップと、
予め撮像された実風景画像である蓄積実風景画像を前記表示部の子画面に表示するステップと、
前記案内経路から得られ前記蓄積実風景画像上で前記ユーザに提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示するステップとを前記ナビゲーション装置に実行させ、
前記蓄積実風景画像は、前記移動体が現在位置よりも進んだ位置で予め撮像された画像であることを特徴とする、プログラム。
【請求項15】
移動体の運転者が目視する実風景を透過する表示部の有する透過面に、案内経路を示す経路オブジェクトを重畳表示するナビゲーション装置であって、
前記案内経路から得られ前記透過面上で前記運転者に提示すべき第1の経路オブジェクトを当該透過面に重畳表示する親画面表示制御部と、
予め撮像された実風景画像である蓄積実風景画像を前記透過面の一部の領域に表示し、前記案内経路から得られ当該蓄積実風景画像上で前記運転者に提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示する子画面表示制御部とを備え、
前記蓄積実風景画像は、前記移動体が現在位置よりも進んだ位置で予め撮像された画像であることを特徴とする、ナビゲーション装置。
【請求項16】
前記子画面表示制御部は、前記透過面の一部の領域を、前記第1の経路オブジェクトと重ならない位置に配置することを特徴とする、請求項15に記載のナビゲーション装置。
【請求項17】
前記子画面表示制御部は、前記透過面の一部の領域を、前記第1の経路オブジェクトの折れ曲がり先の位置と反対側の位置に配置することを特徴とする、請求項16に記載のナビゲーション装置。
【請求項18】
移動体の運転者が目視する実風景を透過する第1の表示部の有する透過面に、案内経路を示す経路オブジェクトを重畳表示するナビゲーション装置であって、
前記案内経路から得られ前記透過面上で前記運転者に提示すべき第1の経路オブジェクトを当該透過面に重畳表示する親画面表示制御部と、
予め撮像された実風景画像である蓄積実風景画像を第2の表示部に表示し、前記案内経路から得られ当該蓄積実風景画像上で前記運転者に提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示する子画面表示制御部とを備え、
前記蓄積実風景画像は、前記移動体が現在位置よりも進んだ位置で予め撮像された画像であることを特徴とする、ナビゲーション装置。
【請求項1】
移動体に設置された撮像部によって撮像される実風景画像をリアルタイムで表示部に表示し、当該実風景画像に案内経路を示す経路オブジェクトを重畳表示するナビゲーション装置であって、
前記撮像部が撮像する実風景画像をリアルタイムで前記表示部の親画面に表示し、前記案内経路から得られ当該実風景画像上でユーザに提示すべき第1の経路オブジェクトを当該実風景画像に重畳表示する親画面表示制御部と、
予め撮像された実風景画像である蓄積実風景画像を前記表示部の子画面に表示し、前記案内経路から得られ当該蓄積実風景画像上で前記ユーザに提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示する子画面表示制御部とを備え、
前記蓄積実風景画像は、前記移動体が現在位置よりも進んだ位置で予め撮像された画像であることを特徴とする、ナビゲーション装置。
【請求項2】
前記蓄積実風景画像は、前記案内経路における前記移動体の進行方向に存在する次の分岐点から脱出する時の画像であることを特徴とする、請求項1に記載のナビゲーション装置。
【請求項3】
前記蓄積実風景画像を蓄積する実風景画像蓄積部と、
前記移動体が分岐点を通過する度に、前記撮像部が撮像する実風景画像を前記蓄積実風景画像として前記実風景画像蓄積部に蓄積させる蓄積制御部とを更に備えることを特徴とする、請求2に記載のナビゲーション装置。
【請求項4】
前記蓄積実風景画像は、静止画像又は動画像であることを特徴とする、請求項1に記載のナビゲーション装置。
【請求項5】
前記子画面表示制御部は、前記子画面を、前記親画面上であって前記第1の経路オブジェクトと重ならない位置に配置することを特徴とする、請求項1に記載のナビゲーション装置。
【請求項6】
前記子画面表示制御部は、前記子画面を、前記親画面上であって前記第1の経路オブジェクトの折れ曲がり先の位置と反対側の位置に配置することを特徴とする、請求項5に記載のナビゲーション装置。
【請求項7】
前記子画面表示制御部は、更に、前記移動体から、前記案内経路における当該移動体の進行方向に存在する次の分岐点までの距離を検知し、当該検知した距離に応じたタイミングで前記子画面を表示し、当該検知した距離に応じて前記子画面の表示サイズを変更することを特徴とする、請求項1に記載のナビゲーション装置。
【請求項8】
前記子画面表示制御部は、更に、前記移動体の走行状態を検知し、
前記子画面表示制御部は、前記走行状態に応じて前記子画面に前記静止画像又は前記動画像のいずれかの前記蓄積実風景画像を表示することを特徴とする、請求項4に記載のナビゲーション装置。
【請求項9】
前記走行状態は、前記移動体が停止中であるのか移動中であるのかを示すことを特徴とする、請求項8に記載のナビゲーション装置。
【請求項10】
前記親画面表示制御部は、更に、前記蓄積実風景画像が撮像された位置を示す撮像位置マークを前記実風景画像に重畳表示することを特徴とする、請求項1に記載のナビゲーション装置。
【請求項11】
前記親画面表示制御部は、更に、前記撮像位置マークと前記子画面とを関連付ける引出し線を前記実風景画像に描画することを特徴とする、請求項10に記載のナビゲーション装置。
【請求項12】
前記移動体から前記案内経路上の各位置までの距離に対応させて、前記第1の経路オブジェクト及び前記第2の経路オブジェクトの各部分の視覚効果を、段階的に変化させることを特徴とする、請求項1に記載のナビゲーション装置。
【請求項13】
移動体に設置された撮像部によって撮像される実風景画像をリアルタイムで表示部に表示し、当該実風景画像に案内経路を示す経路オブジェクトを重畳表示するナビゲーション方法であって、
前記撮像部が撮像する実風景画像をリアルタイムで前記表示部の親画面に表示するステップと、
前記案内経路から得られ前記実風景画像上でユーザに提示すべき第1の経路オブジェクトを当該実風景画像に重畳表示するステップと、
予め撮像された実風景画像である蓄積実風景画像を前記表示部の子画面に表示するステップと、
前記案内経路から得られ前記蓄積実風景画像上で前記ユーザに提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示するステップとを備え、
前記蓄積実風景画像は、前記移動体が現在位置よりも進んだ位置で予め撮像された画像であることを特徴とする、ナビゲーション方法。
【請求項14】
移動体に設置された撮像部によって撮像される実風景画像をリアルタイムで表示部に表示し、当該実風景画像に案内経路を示す経路オブジェクトを重畳表示するナビゲーション装置に用いられるプログラムであって、
前記撮像部が撮像する実風景画像をリアルタイムで前記表示部の親画面に表示するステップと、
前記案内経路から得られ前記実風景画像上でユーザに提示すべき第1の経路オブジェクトを当該実風景画像に重畳表示するステップと、
予め撮像された実風景画像である蓄積実風景画像を前記表示部の子画面に表示するステップと、
前記案内経路から得られ前記蓄積実風景画像上で前記ユーザに提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示するステップとを前記ナビゲーション装置に実行させ、
前記蓄積実風景画像は、前記移動体が現在位置よりも進んだ位置で予め撮像された画像であることを特徴とする、プログラム。
【請求項15】
移動体の運転者が目視する実風景を透過する表示部の有する透過面に、案内経路を示す経路オブジェクトを重畳表示するナビゲーション装置であって、
前記案内経路から得られ前記透過面上で前記運転者に提示すべき第1の経路オブジェクトを当該透過面に重畳表示する親画面表示制御部と、
予め撮像された実風景画像である蓄積実風景画像を前記透過面の一部の領域に表示し、前記案内経路から得られ当該蓄積実風景画像上で前記運転者に提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示する子画面表示制御部とを備え、
前記蓄積実風景画像は、前記移動体が現在位置よりも進んだ位置で予め撮像された画像であることを特徴とする、ナビゲーション装置。
【請求項16】
前記子画面表示制御部は、前記透過面の一部の領域を、前記第1の経路オブジェクトと重ならない位置に配置することを特徴とする、請求項15に記載のナビゲーション装置。
【請求項17】
前記子画面表示制御部は、前記透過面の一部の領域を、前記第1の経路オブジェクトの折れ曲がり先の位置と反対側の位置に配置することを特徴とする、請求項16に記載のナビゲーション装置。
【請求項18】
移動体の運転者が目視する実風景を透過する第1の表示部の有する透過面に、案内経路を示す経路オブジェクトを重畳表示するナビゲーション装置であって、
前記案内経路から得られ前記透過面上で前記運転者に提示すべき第1の経路オブジェクトを当該透過面に重畳表示する親画面表示制御部と、
予め撮像された実風景画像である蓄積実風景画像を第2の表示部に表示し、前記案内経路から得られ当該蓄積実風景画像上で前記運転者に提示すべき第2の経路オブジェクトを当該蓄積実風景画像に重畳表示する子画面表示制御部とを備え、
前記蓄積実風景画像は、前記移動体が現在位置よりも進んだ位置で予め撮像された画像であることを特徴とする、ナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】

【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2009−264835(P2009−264835A)
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願番号】特願2008−112843(P2008−112843)
【出願日】平成20年4月23日(2008.4.23)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願日】平成20年4月23日(2008.4.23)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]