
ナビゲーション装置、画像表示方法および画像表示プログラム
【課題】高架道路と非高架道路が上下に重なっている状態下での平面地図表示における高架道路の視認性を向上させ、地図表示に重ねて表示される誘導案内表示の視認性を向上させる。
【解決手段】制御手段によって、高架道路があり、かつ自車の現在位置が高架道路より下に位置していると判定された場合、右目用画像表示手段および左目用画像表示手段を用いて、高架下の道路が視認可能となるように描画する、または、自車の現在位置が所定の位置である場合に、誘導案内図が手前側に見えるようを表示するナビゲーション装置、画像表示方法、画像表示プログラムを提供する。
【解決手段】制御手段によって、高架道路があり、かつ自車の現在位置が高架道路より下に位置していると判定された場合、右目用画像表示手段および左目用画像表示手段を用いて、高架下の道路が視認可能となるように描画する、または、自車の現在位置が所定の位置である場合に、誘導案内図が手前側に見えるようを表示するナビゲーション装置、画像表示方法、画像表示プログラムを提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置に係り、特に立体表示可能な表示器を持つナビゲーション装置、画像表示方法および画像表示プログラムに関する。
【背景技術】
【0002】
従来、立体表示可能な表示装置として、観察者の視線上に重ねた画像を表示するよう所定の間隔で2枚のパネルを重ねて配置し、それらに表示される画像を見ることによって、立体的な画像として視覚される装置が開示されている(例えば、特許文献1参照)。
この表示方法では、同一の画像が重なるように2枚のパネルに表示させ、奥行きに応じて輝度の差をつける。手前に近いものは前面パネルの輝度を上げ、奥にあるものは後面パネルの輝度を上げる。これにより、2枚のパネルの中間的な位置に存在するかのような表示を行うことが可能である。
【0003】
また、ナビゲーションでは、方面案内図や(例えば、特許文献2参照)、交差点拡大図を表示するものがある(例えば、特許文献3参照)。このような表示は誘導方向や行き先を運転者に知らせるための重要な案内表示であり、高い視認性が要求される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−361465号公報(請求項1)
【特許文献2】特開2001−311625号公報(請求項1)
【特許文献3】特開平7−332994号公報(請求項1)
【発明の概要】
【発明が解決しようとする課題】
【0005】
ナビゲーションでは、高架道路と、その高架道路の下に設置されている道路(以下、非高架道路と記載する)を表示する必要がある。高架道路と非高架道路が上下に重なっている状態を2次元平面で表示すると、非高架道路の表示が高架道路の表示に隠れてしまい、非高架道路の表示の視認性が悪くなると共に自車を示すカーマークが高架道路と高架下の道路のどちらに存在しているのか分かりにくいという問題が生じる。そこで特許文献1に記載の表示方法に高架道路の表示を適用した場合を検討すると、すなわち視線方向に対し、前面パネルに高架道路を、後面パネルに非高架道路を表示すると、高架道路は前面パネルに常に高い輝度で表示されることになり、自車が高架道路の下の道を通行中の場合にはカーマークが見えにくいという問題が生じる。また、特許文献2および特許文献3における方面案内図、交差点拡大図の表示方法は、同一の表示手段に地図とこれらを共に表示するため、視認性に劣るという問題があった。
【0006】
このような背景に鑑みて、本発明の第1の目的は、高架道路と非高架道路が上下に重なっている状態での平面地図表示における高架道路の視認性を向上させることにある。
また、本発明の第2の目的は、地図表示に重ねて表示される誘導案内図の視認性を向上させることにある。
【課題を解決するための手段】
【0007】
制御手段によって、高架道路があり、かつ自車の現在位置が高架道路より下に位置していると判定された場合、右目用画像表示手段と左目用画像表示手段が、奥側に描画される高架道路の画像を視認可能に描画することを特徴とする、または右目用画像表示手段と左目用画像表示手段は、自車の現在位置が所定の位置である場合に、手前側に誘導案内図を表示することを特徴とするナビゲーション装置、画像表示方法および画像表示プログラムを提供する。
【発明の効果】
【0008】
本発明によれば、高架道路と非高架道路が上下に重なっている状態での平面地図表示における高架道路の視認性の向上が可能となる。
また、地図表示に重ねて表示される誘導案内図の視認性の向上が可能となる。
【図面の簡単な説明】
【0009】
【図1】第1の実施形態に係る車載用のナビゲーションシステムの構成を示すブロック図である。
【図2】第1の実施形態に係る一画面の地図表示の処理の流れを示すフローである。
【図3】地図記憶部に格納される道路データの構成を示す図である。
【図4】第1の実施形態に係る自車位置付近の地図表示を行う処理の流れを示すフローである。
【図5】自車位置が非高架道路上にある場合の地図表示の画面例である。
【図6】自車位置が高架道路上にあるときの地図表示の画面例である。
【図7】第1の実施形態に係る誘導案内図を表示する処理の流れを示すフローである。
【図8】誘導案内図のうちの交差点拡大図の例である。
【図9】交差点拡大図を前面パネルの右半分に表示した場合の画面例である。
【図10】誘導案内図のうちの方面案内図の表示画面例である。
【図11】方面案内図を前面パネルの右半分に表示した場合の画面例である。
【図12】第2の実施形態に係る車載用のナビゲーションシステムの構成を示すブロック図である。
【図13】第2の実施形態に係る立体表示原理を示す図である。
【図14】第2の実施形態に係る一画面の地図表示の処理の流れを示すフローである。
【図15】第2の実施形態に係る自車位置付近の地図表示を行う処理の流れを示すフローである。
【図16】第2の実施形態に係る誘導案内図を表示する処理の流れを示すフローである。
【発明を実施するための形態】
【0010】
(第1の実施形態)
以下に、本発明に係るナビゲーション装置の第1の実施形態を、図面を参照して説明する。
図1は、第1の実施形態に係る車載用のナビゲーションシステムの構成を示すブロック図である。
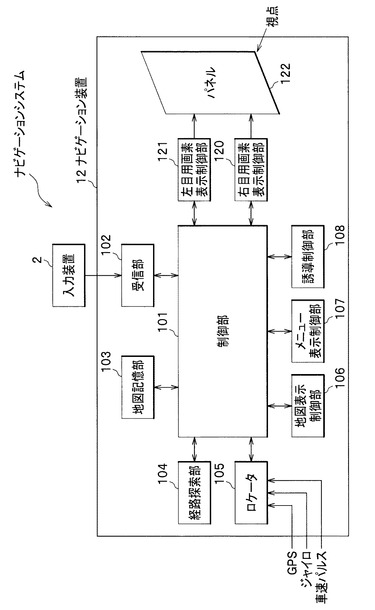
ナビゲーションシステムは、ナビゲーション装置1と、例えばリモコンなどである入力装置2を含んで構成される。ナビゲーション装置1は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、各種インターフェイス、電子回路などを含んで構成される。そしてナビゲーション装置1は、ナビゲーション装置1全体を制御する制御部101(請求項における制御手段)、入力装置2から送られた信号を受信する受信部102、地物に関する情報などが含まれる地図データ、この地図データに含まれる道路データ、目的地データなどを格納する地図記憶部103(請求項における地図格納手段)、本システムを搭載した車両の現在位置から目的地までの経路探索を行う経路探索部104、車速パルス、ジャイロ、GPS(Global Positioning System)信号を用いて自車の現在位置を測位するためのロケータ105(請求項における測位手段)、地図データに対し表示縮尺や回転などの変換を行う地図表示制御部106(請求項における制御手段)、目的地検索のためのメニュー画面の表示の指示などを行うメニュー表示制御部107、自車位置と曲がるべき交差点までの距離または自車と交差点の距離などを算出、判定し、その距離に応じて誘導画面の表示の有無を決定する誘導制御部108、視線方向に重なるように5mmから1cm程度の間隔をあけて配置される前面パネル110(請求項における手前側画像表示手段)と後面パネル112(請求項における奥側画像表示手段)、それぞれのパネルの表示制御を行う前面パネル表示制御部109と後面パネル表示制御部111から構成される。
【0011】
なお、ナビゲーション装置1は、CPU、RAM、ROM、ハードディスクドライブ、入出力インターフェースなどを含んで構成されるコンピュータを用いて具現され、ナビゲーション装置1の各部は、このコンピュータのハードディスクドライブに格納されたプログラムをRAMに展開し、CPUが実行することで、図1に示す各部(制御部101など)の機能が具現される。
【0012】
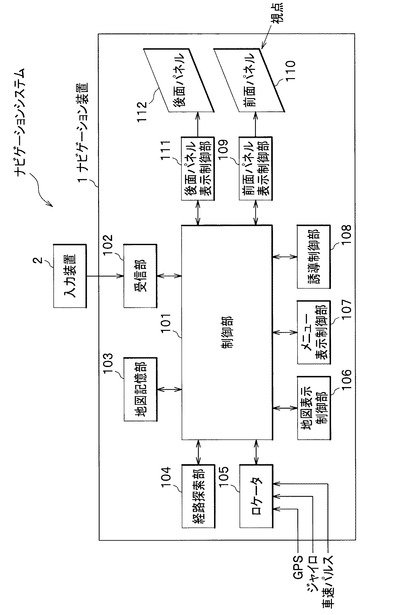
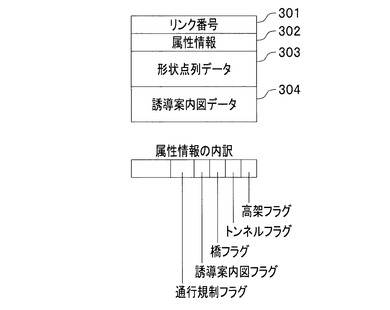
図2は、第1の実施形態に係る一画面分の地図表示の処理の流れを示すフローである。
図1を参照しつつ、図2を参照してナビゲーション装置の処理を説明する。
まず、受信部102が、入力装置2からメニュー表示要求信号を受信し(S101)、受信したメニュー表示要求を制御部101を介して、メニュー表示制御部107へ送る。次に、メニュー表示制御部107は、目的地検索のためのメニュー画面を表示するよう制御部101を介して、後面パネル表示制御部111に指示する。指示された後面パネル表示制御部111は、目的地探索のためのメニュー画面を後面パネル112に表示する(S102)。例えば、カテゴリで目的地を検索する場合、このメニュー画面にはいくつかのカテゴリの種類が表示され、ユーザに、その中の1つを入力装置2を介して選択させる(S103)。すなわち、制御部101が、受信部102を介して、入力装置2からカテゴリ信号を取得すると、制御部101は、そのカテゴリに属する目的地データを地図記憶部103から取得する(S104)。
【0013】
そして、制御部101は、取得した目的地データを後面パネル表示制御部111に送ると同時に、目的地データをリスト形式で表示するよう後面パネル表示制御部111に指示する。指示された後面パネル表示制御部111は、送られた目的地データをリスト形式で後面パネル112に表示する(S105)。さらに、制御部101は、リストの中で、例えばユーザが選択しようとしているなどの理由から、フォーカスが当たっている項目については、その項目が前面パネル110に表示されるよう前面パネル表示制御部109に指示する。指示された前面パネル表示制御部109は、フォーカスが当たっている項目を前面パネル110に表示する(S106)。なお、ステップS106の処理は、必須ではない。このような処理を行うことで、その項目をより目立つようにすることが可能となる。そして、ユーザに、その項目を入力装置2を介して選択させることによって目的地が決定される(S107)。すなわち、入力装置2、受信部102を介して、目的地決定信号が制御部101に入力されることによって、目的地が決定される。
【0014】
次に、制御部101は、ロケータ105に入力される車速パルス、ジャイロおよびGPS信号を用いてロケータ105が測位した自車の現在位置データをロケータ105から取得し、この現在位置データをステップS107で決定した目的地の目的地データを経路探索部104に送る。そして、経路探索部104が、送られた現在位置データと目的地データを基に、現在位置から目的地までの経路を探索する(S108)。経路探索部104は、探索した経路を制御部101と誘導制御部108に送る。制御部101は、送られた経路を基に、地図記憶部103から自車位置付近の地図データを取得し、自車位置付近の地図を表示する(S109)。詳細は、図4から図6を参照して後記する。地図には経路となる道路が他の道路と色で区別されて表示されてもよい。
ところで、ロケータ105から制御部101を介して入力された現在位置データと、経路探索部104から送られた経路を基に誘導制御部108は、自車位置と曲がるべき交差点までの距離を常に算出し、自車位置と曲がるべき交差点までの距離が所定値以下であるか否かを、常に判定している(S110)。誘導制御部108が、自車位置と曲がるべき交差点までの距離が、所定値より大きいと判定したとき(S110→No)、ステップS110に処理を戻す。誘導制御部108が、自車位置と曲がるべき交差点までの距離が、所定値以下であると判定したとき(S110→Yes)、ステップS111の誘導案内図の表示の処理を行い、一画面分の地図表示の処理を終了する。ステップS111の詳細は、図7から図11を参照して後記する。
【0015】
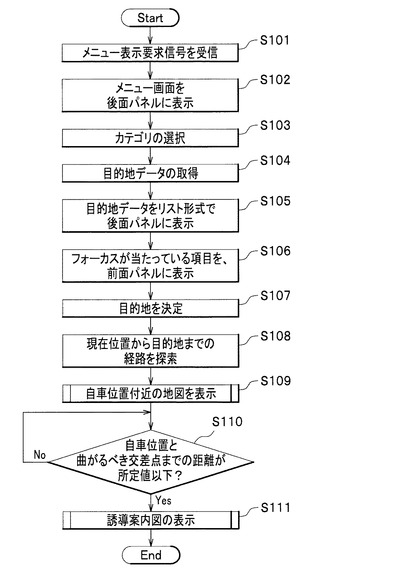
図3は、地図記憶部に格納される道路データの構成を示す図である。
リンク番号301はリンク毎に割り当てられた番号である。ここで、リンクとは、例えば交差点や道路の終点を表すノードからノードまでの辺(道路)のことである。属性情報302は該当するリンクの属性を格納したもので、リンクが、高架になっていることを示す高架フラグ(請求項における高架道路であるか否かを表す情報)、トンネルの中に入っていることを示すトンネルフラグ、橋になっていることを示す橋フラグ、交差点での分岐先の方向を示すデータが存在することを示す誘導案内図フラグ、一方通行などの規制を示す通行規制フラグなどが格納されている。形状点列データ303はリンクの形状を折れ線座標値で示す。誘導案内図データ304は、前記した誘導案内図フラグがセットされている場合に存在する画像データである。
【0016】
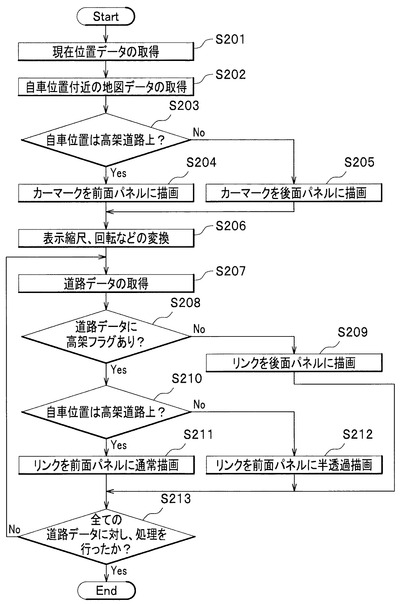
次に、図1および図3を参照しつつ、図4を参照して道路データを用いた地図表示処理について説明する。図4は、第1の実施形態に係る自車位置付近の地図表示を行う処理の流れを示すフローである。
なお、ステップS201からステップS205までは、カーマークの表示に関する処理であり、ステップS206からステップS213までは、リンクの描画に関する処理である。
まず、制御部101が、ロケータ105から自車の現在位置データを取得する(S201)。次に、制御部101は、ステップS201で取得した自車の現在位置データを、地図表示制御部106に送る。そして、地図表示制御部106は、自車位置付近(一画面分:請求項における自車の現在位置を含む所定エリア)の地図データを、取得した自車の現在位置データを基に、地図記憶部103から取得する(S202)。そして、制御部101が取得した現在位置データと、地図データに含まれる道路データとを基に、自車位置を含む所定エリアとしての表示エリア(一画面分のエリア)の地図データを判定の対象として、自車位置が高架道路上であるか否かを判定する(S203)。具体的には、自車位置が、高架道路上に存在しているか、非高架道路に存在しているかは、ロケータ105から取得した情報を基に判定される。すなわち、ロケータ105に入力されるジャイロの情報には、車両の上下運動に関する情報が含まれている。そして、ステップS202で取得した地図データには、前記したように道路データが含まれており、この道路データにはリンクごとに高架フラグが付されている。制御部は、自車が存在しているリンクを現在位置から算出する。そして、制御部101は、この車両の上下運動の情報と、高架フラグとを基に、自車位置が高架道路上に存在しているか否かを判定する。制御部101によって、自車位置が高架道路上であると判定された場合(S203→Yes)、制御部101は、カーマークを前面パネル110に描画するよう前面パネル表示制御部109に指示する。指示された前面パネル表示制御部109は、カーマークを前面パネル110に描画し(S204)、ステップS206に処理を進める。
ステップS203において、制御部101が、自車位置が高架道路上ではないと判定した場合(S203→No)、制御部101は、カーマークを後面パネル112に描画するよう後面パネル表示制御部111に指示する。指示された後面パネル表示制御部111は、カーマークを後面パネル112に描画し(S205)、ステップS206に処理を進める。
【0017】
そして、地図表示制御部106は、表示画面に取得した地図データを表示画面に適合させるために、表示縮尺、回転などの変換を地図データに行い(S206)、変換した地図データを制御部101に送る。そして、制御部101は、取得した地図データに含まれる任意のリンクの道路データを取得する(S207)。そして、制御部101は、取得した道路データの属性情報302を調べ、高架フラグの有無を判定する(S208)。高架フラグがない場合、すなわち、このリンクが高架道路ではない場合(S208→No)、制御部101は、道路データを後面パネル表示制御部111に送ると同時に、後面パネル112にリンクを描画するよう後面パネル表示制御部111に指示する。そして、指示された後面パネル表示制御部111は、送られた道路データの形状点列データ303を基にリンクを後面パネル112に描画する(S209)。
【0018】
ステップS208において、制御部101が、取得した道路データに高架フラグがある、すなわち、このリンクが高架道路の場合(S208→Yes)、自車位置の状態によって描画内容を変えることとなる。まず、制御部101は、ステップS201で得た現在位置データを基に、自車位置が高架道路上か否かを判定する(S210)。自車位置が高架道路上であるか否かの判定方法は、ステップS202で用いた方法と同一である。制御部101が、自車位置が高架道路上であると判定した場合(S210→Yes)、制御部101は、道路データを前面パネル表示制御部109に送ると同時に、このリンクを前面パネル110に通常描画するよう前面パネル表示制御部109に指示する。指示された前面パネル表示制御部109は、送られた道路データの形状点列データ303を基に、リンクを前面パネル110に通常描画する(S211)。
【0019】
ステップS210において、制御部101が、自車位置が高架道路上ではないと判定した場合、すなわち自車位置が高架道路より下に位置していると判定した場合(S210→No)、制御部101は、道路データを前面パネル表示制御部109に送ると同時に、このリンクを前面パネル110に半透過描画するよう前面パネル表示制御部109に指示する。指示された前面パネル表示制御部109は、送られた道路データの形状点列データ303を基に、リンクを前面パネル110に半透過描画する(S212)。半透過にする方法は、高架道路の描画色の輝度を半分にするだけでよい。
このようにすることにより、高架道路の視認性を保ちつつ、非高架道路を通行中のカーマークの表示を見やすくすることが可能となる。
次に、制御部101は、取得した地図データに含まれる全ての道路データに対し、処理を行ったか否かを判定する(S213)。制御部101が、取得した地図データに含まれる全てのデータに関し、処理を行っていないと判定したとき(S213→No)、ステップS207に処理を戻す。制御部101が、取得した地図データに含まれる全てのデータに関し、処理を行ったと判定したとき(S213→Yes)、自車位置付近の道路表示を行う処理を終了する。
【0020】
このような方法により、ナビゲーション装置1の表示において、高架道路が平面地図上に浮き出たような表示効果が得られるため、高架道路の存在が容易に視認でき、さらに、カーマークが高架道路に存在しているのか否かの判断が容易になり、また非高架道路を通行中のカーマークの表示が見やすくなる。
【0021】
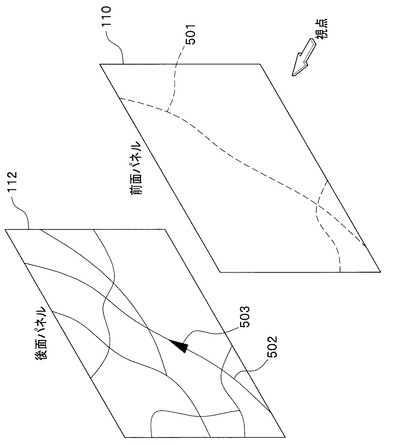
図5は、自車位置が非高架道路上にある場合の地図表示の画面例である。
自車位置は、非高架道路に存在するためカーマーク503は後面パネル112に描画する。そして高架道路501は前面パネル110に半透過で描画する。そして、非高架道路502とカーマーク503は、後面パネル112に通常描画される。これにより、自車が高架道路直下を通行中であることが簡単に識別できる。なお、自車が高架道路ではない道路を通行中のときは、自車位置が高架道路直下ではなくても、高架道路501を半透過描画する。
【0022】
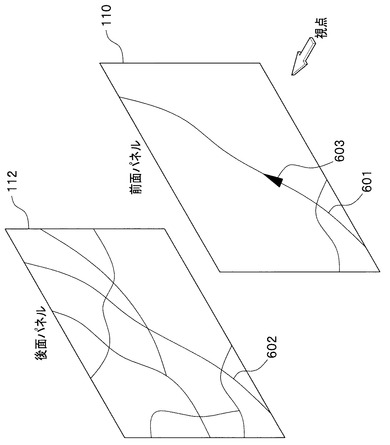
図6は、自車位置が高架道路上にあるときの地図表示の画面例である。
カーマーク603を前面パネル110に描画する。自車位置が高架道路601上であるので、高架道路601は半透過描画ではなく、通常の描画を行う。これにより、後面パネル112に描画された地図に対し、高架道路601が浮き出た描画となり高架道路の視認性が向上する。また、自車が高架道路601を通行中であることが容易に視認できる。なお、非高架道路602は、後面パネル112に通常描画される。
【0023】
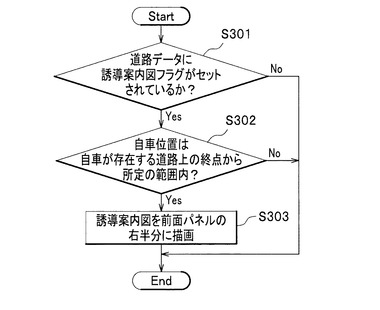
次に、図1、図2および図3を参照しつつ、図7を参照して誘導案内図を表示するための地図表示処理について説明する。図7は、第1の実施形態に係る誘導案内図を表示する処理の流れを示すフローである。
制御部101は、図4のステップS207で取得した道路データの属性情報302(図3参照)を調べ、属性情報302の誘導案内図フラグがセットされているか否かを判定する(S301)。制御部101が、属性情報302に誘導案内図フラグがセットされていないと判定した場合(S301→No)、誘導案内図の表示処理を終了する。制御部101が、属性情報302に誘導案内図フラグがセットされていると判定した場合(S301→Yes)、ステップS302に処理を進める。ステップS302において、制御部101は、誘導制御部108から、自車位置と自車が存在する道路上の終点(自車が曲がるべき交差点)までの距離を取得し、自車位置は自車が存在する道路上の終点から所定の範囲内であるか否かを判定する。所定の範囲とは、およそ500mから300mの範囲が好ましい。ステップS302において、制御部101が、自車位置は、自車が存在する道路上の終点から所定の範囲内ではないと判定した場合(S302→No)、誘導案内図の表示処理を終了する。ステップS302において、制御部101が、自車位置は、自車が存在する道路上の終点から所定の範囲内であると判定した場合(S302→Yes)、制御部101は、地図記憶部103の道路データから誘導案内図データ304を取得し、取得した誘導案内図データ304を前面パネル表示制御部109に送ると同時に、誘導案内図を前面パネル110の右半分に描画するよう前面パネル表示制御部109に指示する。指示された前面パネル表示制御部109は、送られた誘導案内図データを基に、誘導案内図を前面パネル110の右半分に描画する(S303)。
【0024】
このような方法により、ナビゲーション装置の表示において、誘導案内図が平面地図上に浮き出たような表示効果が得られるため、方面案内図や交差点拡大図の表示など、地図表示に重ねて表示される誘導案内表示の視認性の向上が可能となる。
【0025】
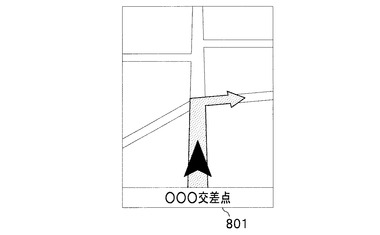
図8は誘導案内図のうちの交差点拡大図の例である。
交差点拡大図801とは交差点の地図を拡大したもので、経路探索部104によって探索された経路に従って自車が走行中に、自車が曲がるべき交差点に近づいたタイミングで地図表示画面の半分程度の表示領域で表示される。
【0026】
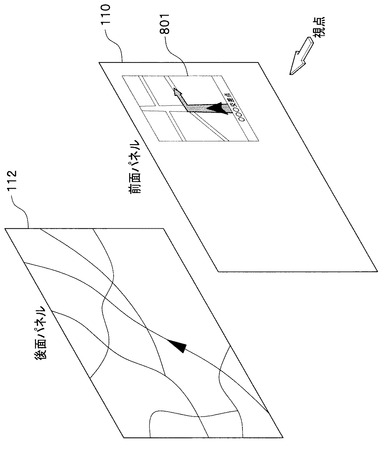
図9は交差点拡大図を前面パネルの右半分に表示した場合の画面例である。
後面パネル112に表示されている地図に対して交差点拡大図801が浮き出て見えるので視認性が向上する。
【0027】
なお、本実施形態では、誘導案内図として交差点拡大図を用いた例を示したが、これに限らず、例えば図10に示すような方面案内図を表示することも可能である。
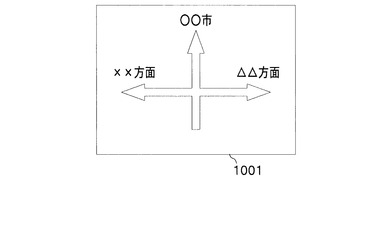
図10は、誘導案内図のうちの方面案内図の例を示したものである。
方面案内図1001は、交差点に接続された各道路がどの方面に向かっているかを示したもので、一般的に画面の半分程度の表示領域を使って、交差点に近づいたときに表示される。
【0028】
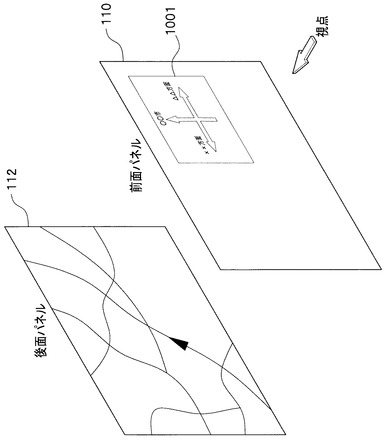
図11は、方面案内図を前面パネルの右半分に表示した場合の画面例である。
このように前面パネル110の右半分に方面案内図1001を表示することによって、後面パネル112に表示された地図に対して方面案内図1001が浮き出た表示となる。これにより、観察者から見て、後面パネル112に描画されている地図よりも方面案内図1001の視認性を向上することが可能となる。
【0029】
なお、誘導案内図として、方面案内図を表示するときは、図2のステップS110の処理は、誘導制御部108が、自車位置と交差点までの距離が閾値以下であるか否かを判定する処理となる。また、前面パネル110に方面案内図と共に、交差点拡大図の表示を行うことも可能である。このとき、方面案内図の表示処理は、交差点拡大図の表示処理の前に行ってもよいし、交差点拡大図の表示処理の後に行ってもよい。
【0030】
(第2の実施形態)
次に、本発明に係る第2の実施形態について図12から図16を参照して説明する。
なお、本実施形態のナビゲーション装置、画像表示方法および画像表示プログラムの基本的な構成および処理は、前記した第1の実施形態と共通するため、共通する部分については、同一の符号を付して説明を省略し、本実施形態の特徴的な部分について説明することとする。
【0031】
図12は、第2の実施形態に係る車載用のナビゲーションシステムの構成を示すブロック図である。
本実施形態のナビゲーションシステムは、ナビゲーション装置12を含んで構成される。
ナビゲーション装置12は、右目用画素表示制御部120、左目用画素表示制御部121、そしてパネル122を含んで構成される。
【0032】
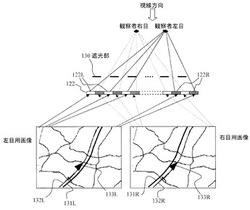
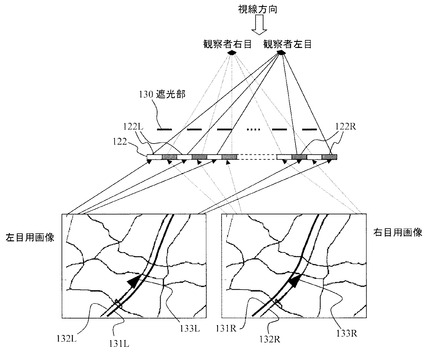
図13は、第2の実施形態に係る立体表示原理を示す図である。
なお、本実施形態では、以下に記載する立体表示原理によって、画像が見かけ上、手前側に見えるよう描画することを、手前側に描画する、と記載し、見かけ上、奥側に見えるよう描画することを奥側に描画する、と記載することとする。
本実施形態では、1枚の液晶パネルであるパネル122は、左目用の画像が描画される左目用画素120Lと右目用の画像が描画される右目用画素120Rが水平方向に対して1画素ごとに交互に存在している。さらに、パネル122は、左目用の画像が右目に入らないよう、そして右目用の画像が左目に入らないようスリットの間隔が調整された遮光部130が、観察者から見て手前側に設置されている。この遮光部130によって、左目用の画像は観察者の左目に、右目用の画像は観察者の右目に見えるよう分光されている。左目用の画像と右目用の画像とは、両眼視差分だけ画像をずらすことにより、立体視が可能になる。なお、本実施形態において、前記した分光は、遮光部130を用いることによって行われているが、これに限らず、観察者から見て、パネル122の後方に設置されたレンチキュラーレンズを用いることによって、分光されてもよい(詳しくは、特開平6−311536号公報参照)。
【0033】
例えば左目用画像には、高架道路131L、非高架道路132Lおよびカーマーク133Lが、図13に示すように配置されて描画されている。そして右目用画像には、高架道路131R、非高架道路132Rおよびカーマーク133Rが、図13に示すように配置されて描画されている。図13に示すように、左目用画像と右目用画像とは両眼視差分だけずらした状態で生成されている。このようにして生成した左目用画像はパネル122の左目用画素122Lに送られる。そして、左目用画像が、左目用画素122Lに描画される。右目用画像も同様の処理によって、右目用画素122Rに描画される。そして、遮光部130によって、右目用画像は右目に、左目用画像は左目に届くよう分光させることで立体的な画像となる。高架道路131またはカーマーク133を半透過にする場合は、右目用画像と左目用画像のそれぞれの高架道路131L、131Rまたはカーマーク133L,133Rを半透過で描画すればよい。更に、地図画像に対して、手前側に交差点拡大図や方面案内図を描画すれば、これらが地図画像に対して手前側に浮き出ているような効果を得ることが可能である。
【0034】
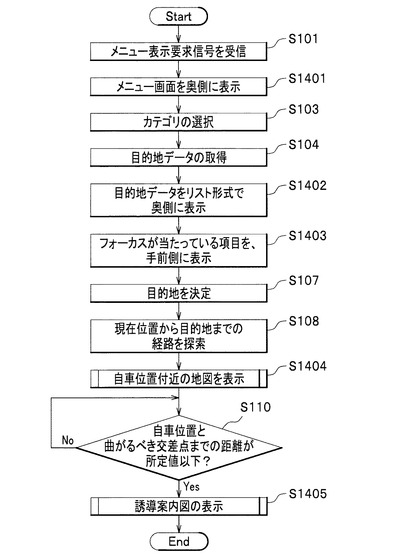
図14は、第2の実施形態に係る一画面の地図表示の処理の流れを示すフローである。
まず、受信部102が、入力装置2からメニュー表示要求信号を受信し(S101)、受信したメニュー表示要求を制御部101を介して、メニュー表示制御部107へ送る。次に、メニュー表示制御部107は、目的地検索のためのメニュー画面を表示するよう制御部101を介して、右目用画素表示制御部120と左目用画素表示制御部121に指示する。指示された右目用画素表示制御部120と左目用画素表示制御部121は、目的地探索のためのメニュー画面を奥側に表示する(S1401)。例えば、カテゴリで目的地を検索する場合、このメニュー画面にはいくつかのカテゴリの種類が表示され、ユーザに、その中の1つを入力装置2を介して選択させる(S103)。すなわち、制御部101が、受信部102を介して、入力装置2からカテゴリ信号を取得すると、制御部101は、そのカテゴリに属する目的地データを地図記憶部103から取得する(S104)。
【0035】
そして、制御部101は、取得した目的地データを右目用画素表示制御部120と左目用画素表示制御部121に送ると同時に、目的地データをリスト形式で奥側に表示するよう右目用画素表示制御部120と左目用画素表示制御部121に指示する。指示された右目用画素表示制御部120と左目用画素表示制御部121は、送られた目的地データをリスト形式で奥側に表示する(S1402)。さらに、制御部101は、リストの中で、例えばユーザが選択しようとしているなどの理由から、フォーカスが当たっている項目については、その項目が手前側に表示されるよう右目用画素表示制御部120と左目用画素表示制御部121に指示する。指示された右目用画素表示制御部120と左目用画素表示制御部121は、フォーカスが当たっている項目を手前側に表示する(S1403)。なお、ステップS1403の処理は、必須ではない。このような処理を行うことで、その項目をより目立つようにすることが可能となる。そして、ユーザに、その項目を入力装置2を介して選択させることによって目的地が決定される(S107)。すなわち、入力装置2、受信部102を介して、目的地決定信号が制御部101に入力されることによって、目的地が決定される。
【0036】
次に、制御部101は、ロケータ105に入力される車速パルス、ジャイロおよびGPS信号を用いてロケータ105が測位した自車の現在位置データをロケータ105から取得し、この現在位置データをステップS107で決定した目的地の目的地データを経路探索部104に送る。そして、経路探索部104が、送られた現在位置データと目的地データを基に、現在位置から目的地までの経路を探索する(S108)。経路探索部104は、探索した経路を制御部101と誘導制御部108に送る。制御部101は、送られた経路を基に、地図記憶部103から自車位置付近の地図データを取得し、自車位置付近の地図を表示する(S1404)。詳細は、図15を参照して後記する。地図には経路となる道路が他の道路と色で区別されて表示されてもよい。
ところで、ロケータ105から制御部101を介して入力された現在位置データと、経路探索部104から送られた経路を基に誘導制御部108は、自車位置と曲がるべき交差点までの距離を常に算出し、自車位置と曲がるべき交差点までの距離が所定値以下であるか否かを、常に判定している(S110)。誘導制御部108が、自車位置と曲がるべき交差点までの距離が、所定値より大きいと判定したとき(S110→No)、ステップS110に処理を戻す。誘導制御部108が、自車位置と曲がるべき交差点までの距離が、所定値以下であると判定したとき(S110→Yes)、ステップS1405の誘導案内図の表示の処理を行い、一画面分の地図表示の処理を終了する。ステップS1405の詳細は、図16を参照して後記する。
【0037】
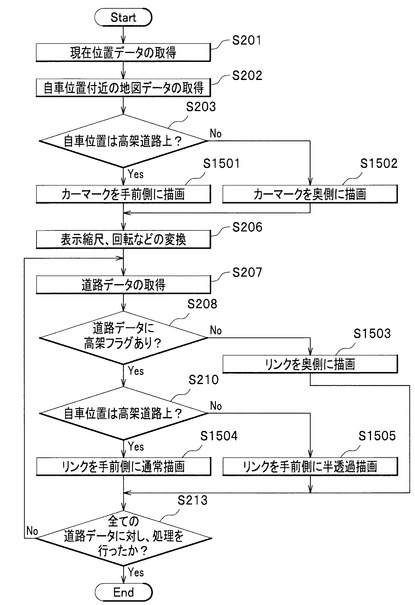
次に、図3および図12を参照しつつ、図15を参照して道路データを用いた地図表示処理について説明する。図15は、第2の実施形態に係る自車位置付近の地図表示を行う処理の流れを示すフローである。
なお、ステップS201からステップS1502までは、カーマークの表示に関する処理であり、ステップS206からステップS213までは、リンクの描画に関する処理である。
まず、制御部101が、ロケータ105から自車の現在位置データを取得する(S201)。次に、制御部101は、ステップS201で取得した自車の現在位置データを、地図表示制御部106に送る。そして、地図表示制御部106は、自車位置付近(一画面分:請求項における自車の現在位置を含む所定エリア)の地図データを、取得した自車の現在位置データを基に、地図記憶部103から取得する(S202)。そして、制御部101が取得した現在位置データと、地図データに含まれる道路データとを基に、自車位置を含む所定エリアとしての表示エリア(一画面分のエリア)の地図データを判定の対象として、自車位置が高架道路上であるか否かを判定する(S203)。具体的には、自車位置が、高架道路上に存在しているか、非高架道路に存在しているかは、ロケータ105から取得した情報を基に判定される。すなわち、ロケータ105に入力されるジャイロの情報には、車両の上下運動に関する情報が含まれている。そして、ステップS202で取得した地図データには、前記したように道路データが含まれており、この道路データにはリンクごとに高架フラグが付されている。制御部は、自車が存在しているリンクを現在位置から算出する。そして、制御部101は、この車両の上下運動の情報と、高架フラグとを基に、自車位置が高架道路上に存在しているか否かを判定する。制御部101によって、自車位置が高架道路上であると判定された場合(S203→Yes)、制御部101は、カーマークを手前側に描画するよう右目用画素表示制御部120と左目用画素表示制御部121に指示する。指示された右目用画素表示制御部120と左目用画素表示制御部121は、カーマークを手前側に描画し(S1501)、ステップS206に処理を進める。
ステップS203において、制御部101が、自車位置が高架道路上ではないと判定した場合(S203→No)、制御部101は、カーマークを奥側に描画するよう右目用画素表示制御部120と左目用画素表示制御部121に指示する。指示された右目用画素表示制御部120と左目用画素表示制御部121は、カーマークを奥側に描画する(S1502)。
【0038】
そして、地図表示制御部106は、表示画面に取得した地図データを表示画面に適合させるために、表示縮尺、回転などの変換を地図データに行い(S206)、変換した地図データを制御部101に送る。そして、制御部101は、取得した地図データに含まれる任意のリンクの道路データを取得する(S207)。そして、制御部101は、取得した道路データの属性情報302を調べ、高架フラグの有無を判定する(S208)。高架フラグがない場合、すなわち、このリンクが高架道路ではない場合(S208→No)、制御部101は、道路データを右目用画素表示制御部120と左目用画素表示制御部121に送ると同時に、奥側にリンクを描画するよう右目用画素表示制御部120と左目用画素表示制御部121に指示する。そして、指示された右目用画素表示制御部120と左目用画素表示制御部121は、送られた道路データの形状点列データ303を基にリンクを奥側に描画する(S1503)。
【0039】
ステップS208において、制御部101が、取得した道路データに高架フラグがある、すなわち、このリンクが高架道路の場合(S208→Yes)、自車位置の状態によって描画内容を変えることとなる。まず、制御部101は、ステップS201で得た現在位置データを基に、自車位置が高架道路上か否かを判定する(S210)。自車位置が高架道路上であるか否かの判定方法は、ステップS202で用いた方法と同一である。制御部101が、自車位置が高架道路上であると判定した場合(S210→Yes)、制御部101は、道路データを右目用画素表示制御部120と左目用画素表示制御部121に送ると同時に、このリンクを手前側に通常描画するよう右目用画素表示制御部120と左目用画素表示制御部121に指示する。指示された右目用画素表示制御部120と左目用画素表示制御部121は、送られた道路データの形状点列データ303を基に、リンクを手前側に通常描画する(S1504)。
【0040】
ステップS210において、制御部101が、自車位置が高架道路上ではないと判定した場合、すなわち自車位置が高架道路より下に位置していると判定した場合(S210→No)、制御部101は、道路データを右目用画素表示制御部120と左目用画素表示制御部121に送ると同時に、このリンクを手前側に半透過描画するよう右目用画素表示制御部120と左目用画素表示制御部121に指示する。指示された右目用画素表示制御部120と左目用画素表示制御部121は、送られた道路データの形状点列データ303を基に、リンクを手前側に半透過描画する(S1505)。半透過にする方法は、高架道路の描画色の輝度を半分にするだけでよい。
このようにすることにより、高架道路の視認性を保ちつつ、非高架道路を通行中のカーマークの表示を見やすくすることが可能となる。
次に、制御部101は、取得した地図データに含まれる全ての道路データに対し、処理を行ったか否かを判定する(S213)。制御部101が、取得した地図データに含まれる全てのデータに関し、処理を行っていないと判定したとき(S213→No)、ステップS207に処理を戻す。制御部101が、取得した地図データに含まれる全てのデータに関し、処理を行ったと判定したとき(S213→Yes)、自車位置付近の道路表示を行う処理を終了する。
【0041】
このような方法により、ナビゲーション装置の表示において、高架道路が平面地図上に浮き出たような表示効果が得られるため、高架道路の存在が容易に視認でき、さらに、カーマークが高架道路に存在しているのか否かの判断が容易になり、また非高架道路を通行中のカーマークの表示が見やすくなる。
【0042】
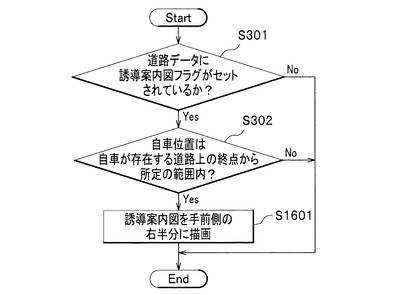
次に、図2、図3および図12を参照しつつ、図16を参照して誘導案内図を表示するための地図表示処理について説明する。図16は、第2の実施形態に係る誘導案内図を表示する処理の流れを示すフローである。
制御部101は、図15のステップS207で取得した道路データの属性情報302(図3参照)を調べ、属性情報302の誘導案内図フラグがセットされているか否かを判定する(S301)。制御部101が、属性情報302に誘導案内図フラグがセットされていないと判定した場合(S301→No)、誘導案内図の表示処理を終了する。制御部101が、属性情報302に誘導案内図フラグがセットされていると判定した場合(S301→Yes)、ステップS302に処理を進める。ステップS302において、制御部101は、誘導制御部108から、自車位置と自車が存在する道路上の終点(自車が曲がるべき交差点)までの距離を取得し、自車位置は自車が存在する道路上の終点から所定の範囲内であるか否かを判定する。所定の範囲とは、およそ500mから300mの範囲が好ましい。ステップS302において、制御部101が、自車位置は、自車が存在する道路上の終点から所定の範囲内ではないと判定した場合(S302→No)、誘導案内図の表示処理を終了する。ステップS302において、制御部101が、自車位置は、自車が存在する道路上の終点から所定の範囲内であると判定した場合(S302→Yes)、制御部101は、地図記憶部103の道路データから誘導案内図データ304を取得し、取得した誘導案内図データ304を右目用画素表示制御部120と左目用画素表示制御部121に送ると同時に、誘導案内図を手前側の右半分に描画するよう右目用画素表示制御部120と左目用画素表示制御部121に指示する。指示された右目用画素表示制御部120と左目用画素表示制御部121は、送られた誘導案内図データを基に、誘導案内図を手前側の右半分に描画する(S303)。
【0043】
このような方法により、ナビゲーション装置1の表示において、誘導案内図が平面地図上に浮き出たような表示効果が得られるため、方面案内図や交差点拡大図の表示など、地図表示に重ねて表示される誘導案内表示の視認性の向上が可能となる。
【符号の説明】
【0044】
1 ナビゲーション装置
2 入力装置
101 制御部
102 受信部
103 地図記憶部
104 経路探索部
105 ロケータ
106 地図表示制御部
107 メニュー表示制御部
108 誘導制御部
109 前面パネル表示制御部
110 前面パネル
111 後面パネル表示制御部
112 後面パネル
120 右目用画素表示制御部
121 左目用画素表示制御部
122 パネル
122R 右目用画素
122L 左目用画素
【技術分野】
【0001】
本発明は、ナビゲーション装置に係り、特に立体表示可能な表示器を持つナビゲーション装置、画像表示方法および画像表示プログラムに関する。
【背景技術】
【0002】
従来、立体表示可能な表示装置として、観察者の視線上に重ねた画像を表示するよう所定の間隔で2枚のパネルを重ねて配置し、それらに表示される画像を見ることによって、立体的な画像として視覚される装置が開示されている(例えば、特許文献1参照)。
この表示方法では、同一の画像が重なるように2枚のパネルに表示させ、奥行きに応じて輝度の差をつける。手前に近いものは前面パネルの輝度を上げ、奥にあるものは後面パネルの輝度を上げる。これにより、2枚のパネルの中間的な位置に存在するかのような表示を行うことが可能である。
【0003】
また、ナビゲーションでは、方面案内図や(例えば、特許文献2参照)、交差点拡大図を表示するものがある(例えば、特許文献3参照)。このような表示は誘導方向や行き先を運転者に知らせるための重要な案内表示であり、高い視認性が要求される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−361465号公報(請求項1)
【特許文献2】特開2001−311625号公報(請求項1)
【特許文献3】特開平7−332994号公報(請求項1)
【発明の概要】
【発明が解決しようとする課題】
【0005】
ナビゲーションでは、高架道路と、その高架道路の下に設置されている道路(以下、非高架道路と記載する)を表示する必要がある。高架道路と非高架道路が上下に重なっている状態を2次元平面で表示すると、非高架道路の表示が高架道路の表示に隠れてしまい、非高架道路の表示の視認性が悪くなると共に自車を示すカーマークが高架道路と高架下の道路のどちらに存在しているのか分かりにくいという問題が生じる。そこで特許文献1に記載の表示方法に高架道路の表示を適用した場合を検討すると、すなわち視線方向に対し、前面パネルに高架道路を、後面パネルに非高架道路を表示すると、高架道路は前面パネルに常に高い輝度で表示されることになり、自車が高架道路の下の道を通行中の場合にはカーマークが見えにくいという問題が生じる。また、特許文献2および特許文献3における方面案内図、交差点拡大図の表示方法は、同一の表示手段に地図とこれらを共に表示するため、視認性に劣るという問題があった。
【0006】
このような背景に鑑みて、本発明の第1の目的は、高架道路と非高架道路が上下に重なっている状態での平面地図表示における高架道路の視認性を向上させることにある。
また、本発明の第2の目的は、地図表示に重ねて表示される誘導案内図の視認性を向上させることにある。
【課題を解決するための手段】
【0007】
制御手段によって、高架道路があり、かつ自車の現在位置が高架道路より下に位置していると判定された場合、右目用画像表示手段と左目用画像表示手段が、奥側に描画される高架道路の画像を視認可能に描画することを特徴とする、または右目用画像表示手段と左目用画像表示手段は、自車の現在位置が所定の位置である場合に、手前側に誘導案内図を表示することを特徴とするナビゲーション装置、画像表示方法および画像表示プログラムを提供する。
【発明の効果】
【0008】
本発明によれば、高架道路と非高架道路が上下に重なっている状態での平面地図表示における高架道路の視認性の向上が可能となる。
また、地図表示に重ねて表示される誘導案内図の視認性の向上が可能となる。
【図面の簡単な説明】
【0009】
【図1】第1の実施形態に係る車載用のナビゲーションシステムの構成を示すブロック図である。
【図2】第1の実施形態に係る一画面の地図表示の処理の流れを示すフローである。
【図3】地図記憶部に格納される道路データの構成を示す図である。
【図4】第1の実施形態に係る自車位置付近の地図表示を行う処理の流れを示すフローである。
【図5】自車位置が非高架道路上にある場合の地図表示の画面例である。
【図6】自車位置が高架道路上にあるときの地図表示の画面例である。
【図7】第1の実施形態に係る誘導案内図を表示する処理の流れを示すフローである。
【図8】誘導案内図のうちの交差点拡大図の例である。
【図9】交差点拡大図を前面パネルの右半分に表示した場合の画面例である。
【図10】誘導案内図のうちの方面案内図の表示画面例である。
【図11】方面案内図を前面パネルの右半分に表示した場合の画面例である。
【図12】第2の実施形態に係る車載用のナビゲーションシステムの構成を示すブロック図である。
【図13】第2の実施形態に係る立体表示原理を示す図である。
【図14】第2の実施形態に係る一画面の地図表示の処理の流れを示すフローである。
【図15】第2の実施形態に係る自車位置付近の地図表示を行う処理の流れを示すフローである。
【図16】第2の実施形態に係る誘導案内図を表示する処理の流れを示すフローである。
【発明を実施するための形態】
【0010】
(第1の実施形態)
以下に、本発明に係るナビゲーション装置の第1の実施形態を、図面を参照して説明する。
図1は、第1の実施形態に係る車載用のナビゲーションシステムの構成を示すブロック図である。
ナビゲーションシステムは、ナビゲーション装置1と、例えばリモコンなどである入力装置2を含んで構成される。ナビゲーション装置1は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、各種インターフェイス、電子回路などを含んで構成される。そしてナビゲーション装置1は、ナビゲーション装置1全体を制御する制御部101(請求項における制御手段)、入力装置2から送られた信号を受信する受信部102、地物に関する情報などが含まれる地図データ、この地図データに含まれる道路データ、目的地データなどを格納する地図記憶部103(請求項における地図格納手段)、本システムを搭載した車両の現在位置から目的地までの経路探索を行う経路探索部104、車速パルス、ジャイロ、GPS(Global Positioning System)信号を用いて自車の現在位置を測位するためのロケータ105(請求項における測位手段)、地図データに対し表示縮尺や回転などの変換を行う地図表示制御部106(請求項における制御手段)、目的地検索のためのメニュー画面の表示の指示などを行うメニュー表示制御部107、自車位置と曲がるべき交差点までの距離または自車と交差点の距離などを算出、判定し、その距離に応じて誘導画面の表示の有無を決定する誘導制御部108、視線方向に重なるように5mmから1cm程度の間隔をあけて配置される前面パネル110(請求項における手前側画像表示手段)と後面パネル112(請求項における奥側画像表示手段)、それぞれのパネルの表示制御を行う前面パネル表示制御部109と後面パネル表示制御部111から構成される。
【0011】
なお、ナビゲーション装置1は、CPU、RAM、ROM、ハードディスクドライブ、入出力インターフェースなどを含んで構成されるコンピュータを用いて具現され、ナビゲーション装置1の各部は、このコンピュータのハードディスクドライブに格納されたプログラムをRAMに展開し、CPUが実行することで、図1に示す各部(制御部101など)の機能が具現される。
【0012】
図2は、第1の実施形態に係る一画面分の地図表示の処理の流れを示すフローである。
図1を参照しつつ、図2を参照してナビゲーション装置の処理を説明する。
まず、受信部102が、入力装置2からメニュー表示要求信号を受信し(S101)、受信したメニュー表示要求を制御部101を介して、メニュー表示制御部107へ送る。次に、メニュー表示制御部107は、目的地検索のためのメニュー画面を表示するよう制御部101を介して、後面パネル表示制御部111に指示する。指示された後面パネル表示制御部111は、目的地探索のためのメニュー画面を後面パネル112に表示する(S102)。例えば、カテゴリで目的地を検索する場合、このメニュー画面にはいくつかのカテゴリの種類が表示され、ユーザに、その中の1つを入力装置2を介して選択させる(S103)。すなわち、制御部101が、受信部102を介して、入力装置2からカテゴリ信号を取得すると、制御部101は、そのカテゴリに属する目的地データを地図記憶部103から取得する(S104)。
【0013】
そして、制御部101は、取得した目的地データを後面パネル表示制御部111に送ると同時に、目的地データをリスト形式で表示するよう後面パネル表示制御部111に指示する。指示された後面パネル表示制御部111は、送られた目的地データをリスト形式で後面パネル112に表示する(S105)。さらに、制御部101は、リストの中で、例えばユーザが選択しようとしているなどの理由から、フォーカスが当たっている項目については、その項目が前面パネル110に表示されるよう前面パネル表示制御部109に指示する。指示された前面パネル表示制御部109は、フォーカスが当たっている項目を前面パネル110に表示する(S106)。なお、ステップS106の処理は、必須ではない。このような処理を行うことで、その項目をより目立つようにすることが可能となる。そして、ユーザに、その項目を入力装置2を介して選択させることによって目的地が決定される(S107)。すなわち、入力装置2、受信部102を介して、目的地決定信号が制御部101に入力されることによって、目的地が決定される。
【0014】
次に、制御部101は、ロケータ105に入力される車速パルス、ジャイロおよびGPS信号を用いてロケータ105が測位した自車の現在位置データをロケータ105から取得し、この現在位置データをステップS107で決定した目的地の目的地データを経路探索部104に送る。そして、経路探索部104が、送られた現在位置データと目的地データを基に、現在位置から目的地までの経路を探索する(S108)。経路探索部104は、探索した経路を制御部101と誘導制御部108に送る。制御部101は、送られた経路を基に、地図記憶部103から自車位置付近の地図データを取得し、自車位置付近の地図を表示する(S109)。詳細は、図4から図6を参照して後記する。地図には経路となる道路が他の道路と色で区別されて表示されてもよい。
ところで、ロケータ105から制御部101を介して入力された現在位置データと、経路探索部104から送られた経路を基に誘導制御部108は、自車位置と曲がるべき交差点までの距離を常に算出し、自車位置と曲がるべき交差点までの距離が所定値以下であるか否かを、常に判定している(S110)。誘導制御部108が、自車位置と曲がるべき交差点までの距離が、所定値より大きいと判定したとき(S110→No)、ステップS110に処理を戻す。誘導制御部108が、自車位置と曲がるべき交差点までの距離が、所定値以下であると判定したとき(S110→Yes)、ステップS111の誘導案内図の表示の処理を行い、一画面分の地図表示の処理を終了する。ステップS111の詳細は、図7から図11を参照して後記する。
【0015】
図3は、地図記憶部に格納される道路データの構成を示す図である。
リンク番号301はリンク毎に割り当てられた番号である。ここで、リンクとは、例えば交差点や道路の終点を表すノードからノードまでの辺(道路)のことである。属性情報302は該当するリンクの属性を格納したもので、リンクが、高架になっていることを示す高架フラグ(請求項における高架道路であるか否かを表す情報)、トンネルの中に入っていることを示すトンネルフラグ、橋になっていることを示す橋フラグ、交差点での分岐先の方向を示すデータが存在することを示す誘導案内図フラグ、一方通行などの規制を示す通行規制フラグなどが格納されている。形状点列データ303はリンクの形状を折れ線座標値で示す。誘導案内図データ304は、前記した誘導案内図フラグがセットされている場合に存在する画像データである。
【0016】
次に、図1および図3を参照しつつ、図4を参照して道路データを用いた地図表示処理について説明する。図4は、第1の実施形態に係る自車位置付近の地図表示を行う処理の流れを示すフローである。
なお、ステップS201からステップS205までは、カーマークの表示に関する処理であり、ステップS206からステップS213までは、リンクの描画に関する処理である。
まず、制御部101が、ロケータ105から自車の現在位置データを取得する(S201)。次に、制御部101は、ステップS201で取得した自車の現在位置データを、地図表示制御部106に送る。そして、地図表示制御部106は、自車位置付近(一画面分:請求項における自車の現在位置を含む所定エリア)の地図データを、取得した自車の現在位置データを基に、地図記憶部103から取得する(S202)。そして、制御部101が取得した現在位置データと、地図データに含まれる道路データとを基に、自車位置を含む所定エリアとしての表示エリア(一画面分のエリア)の地図データを判定の対象として、自車位置が高架道路上であるか否かを判定する(S203)。具体的には、自車位置が、高架道路上に存在しているか、非高架道路に存在しているかは、ロケータ105から取得した情報を基に判定される。すなわち、ロケータ105に入力されるジャイロの情報には、車両の上下運動に関する情報が含まれている。そして、ステップS202で取得した地図データには、前記したように道路データが含まれており、この道路データにはリンクごとに高架フラグが付されている。制御部は、自車が存在しているリンクを現在位置から算出する。そして、制御部101は、この車両の上下運動の情報と、高架フラグとを基に、自車位置が高架道路上に存在しているか否かを判定する。制御部101によって、自車位置が高架道路上であると判定された場合(S203→Yes)、制御部101は、カーマークを前面パネル110に描画するよう前面パネル表示制御部109に指示する。指示された前面パネル表示制御部109は、カーマークを前面パネル110に描画し(S204)、ステップS206に処理を進める。
ステップS203において、制御部101が、自車位置が高架道路上ではないと判定した場合(S203→No)、制御部101は、カーマークを後面パネル112に描画するよう後面パネル表示制御部111に指示する。指示された後面パネル表示制御部111は、カーマークを後面パネル112に描画し(S205)、ステップS206に処理を進める。
【0017】
そして、地図表示制御部106は、表示画面に取得した地図データを表示画面に適合させるために、表示縮尺、回転などの変換を地図データに行い(S206)、変換した地図データを制御部101に送る。そして、制御部101は、取得した地図データに含まれる任意のリンクの道路データを取得する(S207)。そして、制御部101は、取得した道路データの属性情報302を調べ、高架フラグの有無を判定する(S208)。高架フラグがない場合、すなわち、このリンクが高架道路ではない場合(S208→No)、制御部101は、道路データを後面パネル表示制御部111に送ると同時に、後面パネル112にリンクを描画するよう後面パネル表示制御部111に指示する。そして、指示された後面パネル表示制御部111は、送られた道路データの形状点列データ303を基にリンクを後面パネル112に描画する(S209)。
【0018】
ステップS208において、制御部101が、取得した道路データに高架フラグがある、すなわち、このリンクが高架道路の場合(S208→Yes)、自車位置の状態によって描画内容を変えることとなる。まず、制御部101は、ステップS201で得た現在位置データを基に、自車位置が高架道路上か否かを判定する(S210)。自車位置が高架道路上であるか否かの判定方法は、ステップS202で用いた方法と同一である。制御部101が、自車位置が高架道路上であると判定した場合(S210→Yes)、制御部101は、道路データを前面パネル表示制御部109に送ると同時に、このリンクを前面パネル110に通常描画するよう前面パネル表示制御部109に指示する。指示された前面パネル表示制御部109は、送られた道路データの形状点列データ303を基に、リンクを前面パネル110に通常描画する(S211)。
【0019】
ステップS210において、制御部101が、自車位置が高架道路上ではないと判定した場合、すなわち自車位置が高架道路より下に位置していると判定した場合(S210→No)、制御部101は、道路データを前面パネル表示制御部109に送ると同時に、このリンクを前面パネル110に半透過描画するよう前面パネル表示制御部109に指示する。指示された前面パネル表示制御部109は、送られた道路データの形状点列データ303を基に、リンクを前面パネル110に半透過描画する(S212)。半透過にする方法は、高架道路の描画色の輝度を半分にするだけでよい。
このようにすることにより、高架道路の視認性を保ちつつ、非高架道路を通行中のカーマークの表示を見やすくすることが可能となる。
次に、制御部101は、取得した地図データに含まれる全ての道路データに対し、処理を行ったか否かを判定する(S213)。制御部101が、取得した地図データに含まれる全てのデータに関し、処理を行っていないと判定したとき(S213→No)、ステップS207に処理を戻す。制御部101が、取得した地図データに含まれる全てのデータに関し、処理を行ったと判定したとき(S213→Yes)、自車位置付近の道路表示を行う処理を終了する。
【0020】
このような方法により、ナビゲーション装置1の表示において、高架道路が平面地図上に浮き出たような表示効果が得られるため、高架道路の存在が容易に視認でき、さらに、カーマークが高架道路に存在しているのか否かの判断が容易になり、また非高架道路を通行中のカーマークの表示が見やすくなる。
【0021】
図5は、自車位置が非高架道路上にある場合の地図表示の画面例である。
自車位置は、非高架道路に存在するためカーマーク503は後面パネル112に描画する。そして高架道路501は前面パネル110に半透過で描画する。そして、非高架道路502とカーマーク503は、後面パネル112に通常描画される。これにより、自車が高架道路直下を通行中であることが簡単に識別できる。なお、自車が高架道路ではない道路を通行中のときは、自車位置が高架道路直下ではなくても、高架道路501を半透過描画する。
【0022】
図6は、自車位置が高架道路上にあるときの地図表示の画面例である。
カーマーク603を前面パネル110に描画する。自車位置が高架道路601上であるので、高架道路601は半透過描画ではなく、通常の描画を行う。これにより、後面パネル112に描画された地図に対し、高架道路601が浮き出た描画となり高架道路の視認性が向上する。また、自車が高架道路601を通行中であることが容易に視認できる。なお、非高架道路602は、後面パネル112に通常描画される。
【0023】
次に、図1、図2および図3を参照しつつ、図7を参照して誘導案内図を表示するための地図表示処理について説明する。図7は、第1の実施形態に係る誘導案内図を表示する処理の流れを示すフローである。
制御部101は、図4のステップS207で取得した道路データの属性情報302(図3参照)を調べ、属性情報302の誘導案内図フラグがセットされているか否かを判定する(S301)。制御部101が、属性情報302に誘導案内図フラグがセットされていないと判定した場合(S301→No)、誘導案内図の表示処理を終了する。制御部101が、属性情報302に誘導案内図フラグがセットされていると判定した場合(S301→Yes)、ステップS302に処理を進める。ステップS302において、制御部101は、誘導制御部108から、自車位置と自車が存在する道路上の終点(自車が曲がるべき交差点)までの距離を取得し、自車位置は自車が存在する道路上の終点から所定の範囲内であるか否かを判定する。所定の範囲とは、およそ500mから300mの範囲が好ましい。ステップS302において、制御部101が、自車位置は、自車が存在する道路上の終点から所定の範囲内ではないと判定した場合(S302→No)、誘導案内図の表示処理を終了する。ステップS302において、制御部101が、自車位置は、自車が存在する道路上の終点から所定の範囲内であると判定した場合(S302→Yes)、制御部101は、地図記憶部103の道路データから誘導案内図データ304を取得し、取得した誘導案内図データ304を前面パネル表示制御部109に送ると同時に、誘導案内図を前面パネル110の右半分に描画するよう前面パネル表示制御部109に指示する。指示された前面パネル表示制御部109は、送られた誘導案内図データを基に、誘導案内図を前面パネル110の右半分に描画する(S303)。
【0024】
このような方法により、ナビゲーション装置の表示において、誘導案内図が平面地図上に浮き出たような表示効果が得られるため、方面案内図や交差点拡大図の表示など、地図表示に重ねて表示される誘導案内表示の視認性の向上が可能となる。
【0025】
図8は誘導案内図のうちの交差点拡大図の例である。
交差点拡大図801とは交差点の地図を拡大したもので、経路探索部104によって探索された経路に従って自車が走行中に、自車が曲がるべき交差点に近づいたタイミングで地図表示画面の半分程度の表示領域で表示される。
【0026】
図9は交差点拡大図を前面パネルの右半分に表示した場合の画面例である。
後面パネル112に表示されている地図に対して交差点拡大図801が浮き出て見えるので視認性が向上する。
【0027】
なお、本実施形態では、誘導案内図として交差点拡大図を用いた例を示したが、これに限らず、例えば図10に示すような方面案内図を表示することも可能である。
図10は、誘導案内図のうちの方面案内図の例を示したものである。
方面案内図1001は、交差点に接続された各道路がどの方面に向かっているかを示したもので、一般的に画面の半分程度の表示領域を使って、交差点に近づいたときに表示される。
【0028】
図11は、方面案内図を前面パネルの右半分に表示した場合の画面例である。
このように前面パネル110の右半分に方面案内図1001を表示することによって、後面パネル112に表示された地図に対して方面案内図1001が浮き出た表示となる。これにより、観察者から見て、後面パネル112に描画されている地図よりも方面案内図1001の視認性を向上することが可能となる。
【0029】
なお、誘導案内図として、方面案内図を表示するときは、図2のステップS110の処理は、誘導制御部108が、自車位置と交差点までの距離が閾値以下であるか否かを判定する処理となる。また、前面パネル110に方面案内図と共に、交差点拡大図の表示を行うことも可能である。このとき、方面案内図の表示処理は、交差点拡大図の表示処理の前に行ってもよいし、交差点拡大図の表示処理の後に行ってもよい。
【0030】
(第2の実施形態)
次に、本発明に係る第2の実施形態について図12から図16を参照して説明する。
なお、本実施形態のナビゲーション装置、画像表示方法および画像表示プログラムの基本的な構成および処理は、前記した第1の実施形態と共通するため、共通する部分については、同一の符号を付して説明を省略し、本実施形態の特徴的な部分について説明することとする。
【0031】
図12は、第2の実施形態に係る車載用のナビゲーションシステムの構成を示すブロック図である。
本実施形態のナビゲーションシステムは、ナビゲーション装置12を含んで構成される。
ナビゲーション装置12は、右目用画素表示制御部120、左目用画素表示制御部121、そしてパネル122を含んで構成される。
【0032】
図13は、第2の実施形態に係る立体表示原理を示す図である。
なお、本実施形態では、以下に記載する立体表示原理によって、画像が見かけ上、手前側に見えるよう描画することを、手前側に描画する、と記載し、見かけ上、奥側に見えるよう描画することを奥側に描画する、と記載することとする。
本実施形態では、1枚の液晶パネルであるパネル122は、左目用の画像が描画される左目用画素120Lと右目用の画像が描画される右目用画素120Rが水平方向に対して1画素ごとに交互に存在している。さらに、パネル122は、左目用の画像が右目に入らないよう、そして右目用の画像が左目に入らないようスリットの間隔が調整された遮光部130が、観察者から見て手前側に設置されている。この遮光部130によって、左目用の画像は観察者の左目に、右目用の画像は観察者の右目に見えるよう分光されている。左目用の画像と右目用の画像とは、両眼視差分だけ画像をずらすことにより、立体視が可能になる。なお、本実施形態において、前記した分光は、遮光部130を用いることによって行われているが、これに限らず、観察者から見て、パネル122の後方に設置されたレンチキュラーレンズを用いることによって、分光されてもよい(詳しくは、特開平6−311536号公報参照)。
【0033】
例えば左目用画像には、高架道路131L、非高架道路132Lおよびカーマーク133Lが、図13に示すように配置されて描画されている。そして右目用画像には、高架道路131R、非高架道路132Rおよびカーマーク133Rが、図13に示すように配置されて描画されている。図13に示すように、左目用画像と右目用画像とは両眼視差分だけずらした状態で生成されている。このようにして生成した左目用画像はパネル122の左目用画素122Lに送られる。そして、左目用画像が、左目用画素122Lに描画される。右目用画像も同様の処理によって、右目用画素122Rに描画される。そして、遮光部130によって、右目用画像は右目に、左目用画像は左目に届くよう分光させることで立体的な画像となる。高架道路131またはカーマーク133を半透過にする場合は、右目用画像と左目用画像のそれぞれの高架道路131L、131Rまたはカーマーク133L,133Rを半透過で描画すればよい。更に、地図画像に対して、手前側に交差点拡大図や方面案内図を描画すれば、これらが地図画像に対して手前側に浮き出ているような効果を得ることが可能である。
【0034】
図14は、第2の実施形態に係る一画面の地図表示の処理の流れを示すフローである。
まず、受信部102が、入力装置2からメニュー表示要求信号を受信し(S101)、受信したメニュー表示要求を制御部101を介して、メニュー表示制御部107へ送る。次に、メニュー表示制御部107は、目的地検索のためのメニュー画面を表示するよう制御部101を介して、右目用画素表示制御部120と左目用画素表示制御部121に指示する。指示された右目用画素表示制御部120と左目用画素表示制御部121は、目的地探索のためのメニュー画面を奥側に表示する(S1401)。例えば、カテゴリで目的地を検索する場合、このメニュー画面にはいくつかのカテゴリの種類が表示され、ユーザに、その中の1つを入力装置2を介して選択させる(S103)。すなわち、制御部101が、受信部102を介して、入力装置2からカテゴリ信号を取得すると、制御部101は、そのカテゴリに属する目的地データを地図記憶部103から取得する(S104)。
【0035】
そして、制御部101は、取得した目的地データを右目用画素表示制御部120と左目用画素表示制御部121に送ると同時に、目的地データをリスト形式で奥側に表示するよう右目用画素表示制御部120と左目用画素表示制御部121に指示する。指示された右目用画素表示制御部120と左目用画素表示制御部121は、送られた目的地データをリスト形式で奥側に表示する(S1402)。さらに、制御部101は、リストの中で、例えばユーザが選択しようとしているなどの理由から、フォーカスが当たっている項目については、その項目が手前側に表示されるよう右目用画素表示制御部120と左目用画素表示制御部121に指示する。指示された右目用画素表示制御部120と左目用画素表示制御部121は、フォーカスが当たっている項目を手前側に表示する(S1403)。なお、ステップS1403の処理は、必須ではない。このような処理を行うことで、その項目をより目立つようにすることが可能となる。そして、ユーザに、その項目を入力装置2を介して選択させることによって目的地が決定される(S107)。すなわち、入力装置2、受信部102を介して、目的地決定信号が制御部101に入力されることによって、目的地が決定される。
【0036】
次に、制御部101は、ロケータ105に入力される車速パルス、ジャイロおよびGPS信号を用いてロケータ105が測位した自車の現在位置データをロケータ105から取得し、この現在位置データをステップS107で決定した目的地の目的地データを経路探索部104に送る。そして、経路探索部104が、送られた現在位置データと目的地データを基に、現在位置から目的地までの経路を探索する(S108)。経路探索部104は、探索した経路を制御部101と誘導制御部108に送る。制御部101は、送られた経路を基に、地図記憶部103から自車位置付近の地図データを取得し、自車位置付近の地図を表示する(S1404)。詳細は、図15を参照して後記する。地図には経路となる道路が他の道路と色で区別されて表示されてもよい。
ところで、ロケータ105から制御部101を介して入力された現在位置データと、経路探索部104から送られた経路を基に誘導制御部108は、自車位置と曲がるべき交差点までの距離を常に算出し、自車位置と曲がるべき交差点までの距離が所定値以下であるか否かを、常に判定している(S110)。誘導制御部108が、自車位置と曲がるべき交差点までの距離が、所定値より大きいと判定したとき(S110→No)、ステップS110に処理を戻す。誘導制御部108が、自車位置と曲がるべき交差点までの距離が、所定値以下であると判定したとき(S110→Yes)、ステップS1405の誘導案内図の表示の処理を行い、一画面分の地図表示の処理を終了する。ステップS1405の詳細は、図16を参照して後記する。
【0037】
次に、図3および図12を参照しつつ、図15を参照して道路データを用いた地図表示処理について説明する。図15は、第2の実施形態に係る自車位置付近の地図表示を行う処理の流れを示すフローである。
なお、ステップS201からステップS1502までは、カーマークの表示に関する処理であり、ステップS206からステップS213までは、リンクの描画に関する処理である。
まず、制御部101が、ロケータ105から自車の現在位置データを取得する(S201)。次に、制御部101は、ステップS201で取得した自車の現在位置データを、地図表示制御部106に送る。そして、地図表示制御部106は、自車位置付近(一画面分:請求項における自車の現在位置を含む所定エリア)の地図データを、取得した自車の現在位置データを基に、地図記憶部103から取得する(S202)。そして、制御部101が取得した現在位置データと、地図データに含まれる道路データとを基に、自車位置を含む所定エリアとしての表示エリア(一画面分のエリア)の地図データを判定の対象として、自車位置が高架道路上であるか否かを判定する(S203)。具体的には、自車位置が、高架道路上に存在しているか、非高架道路に存在しているかは、ロケータ105から取得した情報を基に判定される。すなわち、ロケータ105に入力されるジャイロの情報には、車両の上下運動に関する情報が含まれている。そして、ステップS202で取得した地図データには、前記したように道路データが含まれており、この道路データにはリンクごとに高架フラグが付されている。制御部は、自車が存在しているリンクを現在位置から算出する。そして、制御部101は、この車両の上下運動の情報と、高架フラグとを基に、自車位置が高架道路上に存在しているか否かを判定する。制御部101によって、自車位置が高架道路上であると判定された場合(S203→Yes)、制御部101は、カーマークを手前側に描画するよう右目用画素表示制御部120と左目用画素表示制御部121に指示する。指示された右目用画素表示制御部120と左目用画素表示制御部121は、カーマークを手前側に描画し(S1501)、ステップS206に処理を進める。
ステップS203において、制御部101が、自車位置が高架道路上ではないと判定した場合(S203→No)、制御部101は、カーマークを奥側に描画するよう右目用画素表示制御部120と左目用画素表示制御部121に指示する。指示された右目用画素表示制御部120と左目用画素表示制御部121は、カーマークを奥側に描画する(S1502)。
【0038】
そして、地図表示制御部106は、表示画面に取得した地図データを表示画面に適合させるために、表示縮尺、回転などの変換を地図データに行い(S206)、変換した地図データを制御部101に送る。そして、制御部101は、取得した地図データに含まれる任意のリンクの道路データを取得する(S207)。そして、制御部101は、取得した道路データの属性情報302を調べ、高架フラグの有無を判定する(S208)。高架フラグがない場合、すなわち、このリンクが高架道路ではない場合(S208→No)、制御部101は、道路データを右目用画素表示制御部120と左目用画素表示制御部121に送ると同時に、奥側にリンクを描画するよう右目用画素表示制御部120と左目用画素表示制御部121に指示する。そして、指示された右目用画素表示制御部120と左目用画素表示制御部121は、送られた道路データの形状点列データ303を基にリンクを奥側に描画する(S1503)。
【0039】
ステップS208において、制御部101が、取得した道路データに高架フラグがある、すなわち、このリンクが高架道路の場合(S208→Yes)、自車位置の状態によって描画内容を変えることとなる。まず、制御部101は、ステップS201で得た現在位置データを基に、自車位置が高架道路上か否かを判定する(S210)。自車位置が高架道路上であるか否かの判定方法は、ステップS202で用いた方法と同一である。制御部101が、自車位置が高架道路上であると判定した場合(S210→Yes)、制御部101は、道路データを右目用画素表示制御部120と左目用画素表示制御部121に送ると同時に、このリンクを手前側に通常描画するよう右目用画素表示制御部120と左目用画素表示制御部121に指示する。指示された右目用画素表示制御部120と左目用画素表示制御部121は、送られた道路データの形状点列データ303を基に、リンクを手前側に通常描画する(S1504)。
【0040】
ステップS210において、制御部101が、自車位置が高架道路上ではないと判定した場合、すなわち自車位置が高架道路より下に位置していると判定した場合(S210→No)、制御部101は、道路データを右目用画素表示制御部120と左目用画素表示制御部121に送ると同時に、このリンクを手前側に半透過描画するよう右目用画素表示制御部120と左目用画素表示制御部121に指示する。指示された右目用画素表示制御部120と左目用画素表示制御部121は、送られた道路データの形状点列データ303を基に、リンクを手前側に半透過描画する(S1505)。半透過にする方法は、高架道路の描画色の輝度を半分にするだけでよい。
このようにすることにより、高架道路の視認性を保ちつつ、非高架道路を通行中のカーマークの表示を見やすくすることが可能となる。
次に、制御部101は、取得した地図データに含まれる全ての道路データに対し、処理を行ったか否かを判定する(S213)。制御部101が、取得した地図データに含まれる全てのデータに関し、処理を行っていないと判定したとき(S213→No)、ステップS207に処理を戻す。制御部101が、取得した地図データに含まれる全てのデータに関し、処理を行ったと判定したとき(S213→Yes)、自車位置付近の道路表示を行う処理を終了する。
【0041】
このような方法により、ナビゲーション装置の表示において、高架道路が平面地図上に浮き出たような表示効果が得られるため、高架道路の存在が容易に視認でき、さらに、カーマークが高架道路に存在しているのか否かの判断が容易になり、また非高架道路を通行中のカーマークの表示が見やすくなる。
【0042】
次に、図2、図3および図12を参照しつつ、図16を参照して誘導案内図を表示するための地図表示処理について説明する。図16は、第2の実施形態に係る誘導案内図を表示する処理の流れを示すフローである。
制御部101は、図15のステップS207で取得した道路データの属性情報302(図3参照)を調べ、属性情報302の誘導案内図フラグがセットされているか否かを判定する(S301)。制御部101が、属性情報302に誘導案内図フラグがセットされていないと判定した場合(S301→No)、誘導案内図の表示処理を終了する。制御部101が、属性情報302に誘導案内図フラグがセットされていると判定した場合(S301→Yes)、ステップS302に処理を進める。ステップS302において、制御部101は、誘導制御部108から、自車位置と自車が存在する道路上の終点(自車が曲がるべき交差点)までの距離を取得し、自車位置は自車が存在する道路上の終点から所定の範囲内であるか否かを判定する。所定の範囲とは、およそ500mから300mの範囲が好ましい。ステップS302において、制御部101が、自車位置は、自車が存在する道路上の終点から所定の範囲内ではないと判定した場合(S302→No)、誘導案内図の表示処理を終了する。ステップS302において、制御部101が、自車位置は、自車が存在する道路上の終点から所定の範囲内であると判定した場合(S302→Yes)、制御部101は、地図記憶部103の道路データから誘導案内図データ304を取得し、取得した誘導案内図データ304を右目用画素表示制御部120と左目用画素表示制御部121に送ると同時に、誘導案内図を手前側の右半分に描画するよう右目用画素表示制御部120と左目用画素表示制御部121に指示する。指示された右目用画素表示制御部120と左目用画素表示制御部121は、送られた誘導案内図データを基に、誘導案内図を手前側の右半分に描画する(S303)。
【0043】
このような方法により、ナビゲーション装置1の表示において、誘導案内図が平面地図上に浮き出たような表示効果が得られるため、方面案内図や交差点拡大図の表示など、地図表示に重ねて表示される誘導案内表示の視認性の向上が可能となる。
【符号の説明】
【0044】
1 ナビゲーション装置
2 入力装置
101 制御部
102 受信部
103 地図記憶部
104 経路探索部
105 ロケータ
106 地図表示制御部
107 メニュー表示制御部
108 誘導制御部
109 前面パネル表示制御部
110 前面パネル
111 後面パネル表示制御部
112 後面パネル
120 右目用画素表示制御部
121 左目用画素表示制御部
122 パネル
122R 右目用画素
122L 左目用画素
【特許請求の範囲】
【請求項1】
右目用の画像を表示する右目用画像表示手段と、
左目用の画像を表示する左目用画像表示手段と、
自車の現在位置を測位するための測位手段と、
地物が高架道路であるか否かを表す情報および道路の画像のデータを含む地図のデータを格納する地図格納手段と、
前記測位手段が測位した自車の現在位置を基に、前記地図格納手段から前記自車の現在位置を含む所定エリアの前記地図のデータを読み込み、
前記制御手段が、前記地図のデータとして登録された地物が高架道路であるか否かを表す情報に基づいて、前記所定エリアに高架道路があるか否かを判定し、
前記所定エリアに高架道路があると判定された場合、
前記制御手段が、前記測位手段が測位した自車の現在位置を基に、前記自車の現在位置が高架道路上であるか否かを判定し、
前記自車の現在位置が高架道路上ではない場合、
前記制御手段が、右目用画像信号と左目用画像信号とに、前記地図のデータに含まれる高架道路の画像のデータを含ませ、
前記制御手段が、前記右目用画像信号を右目用画像表示手段に送り、
前記制御手段が、前記高架道路が、見かけ上、高架下の道路よりも手前側に見えるよう、前記右目用画像信号とは、描画する位置をずらした前記左目用画像信号を左目用画像表示手段に送り、
前記右目用画像表示手段と左目用画像表示手段とが、それぞれ送られた前記右目用画像信号と前記左目用画像信号に基づき、高架下の道路が視認可能になるように前記右目用画像表示手段および前記左目用画像表示手段に描画する制御手段と、
を有することを特徴とするナビゲーション装置。
【請求項2】
前記高架下の道路が視認可能に描画することとは、前記制御手段が、前記高架道路の画像が半透過となるよう描画することである
ことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記制御手段は、前記自車の現在位置が、所定の位置である場合に、誘導案内図の画像が手前側に見えるよう描画する
ことを特徴とする請求項1または請求項2に記載のナビゲーション装置。
【請求項4】
前記誘導案内図は、方面案内図である
ことを特徴とする請求項3に記載のナビゲーション装置。
【請求項5】
前記誘導案内図は、交差点拡大図である
ことを特徴とする請求項3に記載のナビゲーション装置。
【請求項6】
右目用の画像を表示する右目用画像表示手段と、
左目用の画像を表示する左目用画像表示手段と、
自車の現在位置を測位するための測位手段と、
地物が高架道路であるか否かを表す情報および道路の画像のデータを含む地図のデータを格納する地図格納手段と、
各手段の制御を行う制御手段とを含んで構成されるナビゲーション装置における画像表示方法であって、
前記制御手段が、前記測位手段が測位した自車の現在位置を基に、前記地図格納手段から前記自車の現在位置を含む所定エリアの前記地図のデータを読み込み、
前記制御手段が、前記地図のデータとして登録された地物が高架道路であるか否かを表す情報に基づいて、前記所定エリアに高架道路があるか否かを判定し、
前記所定エリアに高架道路があると判定された場合、
前記制御手段が、前記測位手段が測位した自車の現在位置を基に、前記自車の現在位置が高架道路上であるか否かを判定し、
前記自車の現在位置が高架道路上ではない場合、
前記制御手段が、右目用画像信号と左目用画像信号とに、前記地図のデータに含まれる高架道路の画像のデータを含ませ、
前記制御手段が、前記右目用画像信号を右目用画像表示手段に送り、
前記制御手段が、前記高架道路が、見かけ上、高架下の道路よりも手前側に見えるよう、前記右目用画像信号とは、描画する位置をずらした前記左目用画像信号を左目用画像表示手段に送り、
前記右目用画像表示手段と左目用画像表示手段とが、それぞれ送られた前記右目用画像信号と前記左目用画像信号に基づき、高架下の道路が視認可能になるように前記右目用画像表示手段および前記左目用画像表示手段に描画する
ことを特徴とする画像表示方法。
【請求項7】
前記高架下の道路が視認可能に描画することとは、前記制御手段が、前記高架道路の画像が半透過となるよう描画することである
ことを特徴とする請求項6に記載の画像表示方法。
【請求項8】
前記制御手段は、前記自車の現在位置が、所定の位置である場合、誘導案内図の画像が手前側に見えるよう描画する
ことを特徴とする請求項6または請求項7に記載の画像表示方法。
【請求項9】
前記誘導案内図は、方面案内図である
ことを特徴とする請求項8に記載の画像表示方法。
【請求項10】
前記誘導案内図は、交差点拡大図である
ことを特徴とする請求項8に記載の画像表示方法。
【請求項11】
ナビゲーション装置の制御装置に、請求項6から請求項10のいずれか一項に記載の画像表示方法を実行
させる画像表示プログラム。
【請求項1】
右目用の画像を表示する右目用画像表示手段と、
左目用の画像を表示する左目用画像表示手段と、
自車の現在位置を測位するための測位手段と、
地物が高架道路であるか否かを表す情報および道路の画像のデータを含む地図のデータを格納する地図格納手段と、
前記測位手段が測位した自車の現在位置を基に、前記地図格納手段から前記自車の現在位置を含む所定エリアの前記地図のデータを読み込み、
前記制御手段が、前記地図のデータとして登録された地物が高架道路であるか否かを表す情報に基づいて、前記所定エリアに高架道路があるか否かを判定し、
前記所定エリアに高架道路があると判定された場合、
前記制御手段が、前記測位手段が測位した自車の現在位置を基に、前記自車の現在位置が高架道路上であるか否かを判定し、
前記自車の現在位置が高架道路上ではない場合、
前記制御手段が、右目用画像信号と左目用画像信号とに、前記地図のデータに含まれる高架道路の画像のデータを含ませ、
前記制御手段が、前記右目用画像信号を右目用画像表示手段に送り、
前記制御手段が、前記高架道路が、見かけ上、高架下の道路よりも手前側に見えるよう、前記右目用画像信号とは、描画する位置をずらした前記左目用画像信号を左目用画像表示手段に送り、
前記右目用画像表示手段と左目用画像表示手段とが、それぞれ送られた前記右目用画像信号と前記左目用画像信号に基づき、高架下の道路が視認可能になるように前記右目用画像表示手段および前記左目用画像表示手段に描画する制御手段と、
を有することを特徴とするナビゲーション装置。
【請求項2】
前記高架下の道路が視認可能に描画することとは、前記制御手段が、前記高架道路の画像が半透過となるよう描画することである
ことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記制御手段は、前記自車の現在位置が、所定の位置である場合に、誘導案内図の画像が手前側に見えるよう描画する
ことを特徴とする請求項1または請求項2に記載のナビゲーション装置。
【請求項4】
前記誘導案内図は、方面案内図である
ことを特徴とする請求項3に記載のナビゲーション装置。
【請求項5】
前記誘導案内図は、交差点拡大図である
ことを特徴とする請求項3に記載のナビゲーション装置。
【請求項6】
右目用の画像を表示する右目用画像表示手段と、
左目用の画像を表示する左目用画像表示手段と、
自車の現在位置を測位するための測位手段と、
地物が高架道路であるか否かを表す情報および道路の画像のデータを含む地図のデータを格納する地図格納手段と、
各手段の制御を行う制御手段とを含んで構成されるナビゲーション装置における画像表示方法であって、
前記制御手段が、前記測位手段が測位した自車の現在位置を基に、前記地図格納手段から前記自車の現在位置を含む所定エリアの前記地図のデータを読み込み、
前記制御手段が、前記地図のデータとして登録された地物が高架道路であるか否かを表す情報に基づいて、前記所定エリアに高架道路があるか否かを判定し、
前記所定エリアに高架道路があると判定された場合、
前記制御手段が、前記測位手段が測位した自車の現在位置を基に、前記自車の現在位置が高架道路上であるか否かを判定し、
前記自車の現在位置が高架道路上ではない場合、
前記制御手段が、右目用画像信号と左目用画像信号とに、前記地図のデータに含まれる高架道路の画像のデータを含ませ、
前記制御手段が、前記右目用画像信号を右目用画像表示手段に送り、
前記制御手段が、前記高架道路が、見かけ上、高架下の道路よりも手前側に見えるよう、前記右目用画像信号とは、描画する位置をずらした前記左目用画像信号を左目用画像表示手段に送り、
前記右目用画像表示手段と左目用画像表示手段とが、それぞれ送られた前記右目用画像信号と前記左目用画像信号に基づき、高架下の道路が視認可能になるように前記右目用画像表示手段および前記左目用画像表示手段に描画する
ことを特徴とする画像表示方法。
【請求項7】
前記高架下の道路が視認可能に描画することとは、前記制御手段が、前記高架道路の画像が半透過となるよう描画することである
ことを特徴とする請求項6に記載の画像表示方法。
【請求項8】
前記制御手段は、前記自車の現在位置が、所定の位置である場合、誘導案内図の画像が手前側に見えるよう描画する
ことを特徴とする請求項6または請求項7に記載の画像表示方法。
【請求項9】
前記誘導案内図は、方面案内図である
ことを特徴とする請求項8に記載の画像表示方法。
【請求項10】
前記誘導案内図は、交差点拡大図である
ことを特徴とする請求項8に記載の画像表示方法。
【請求項11】
ナビゲーション装置の制御装置に、請求項6から請求項10のいずれか一項に記載の画像表示方法を実行
させる画像表示プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−123390(P2012−123390A)
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願番号】特願2011−271216(P2011−271216)
【出願日】平成23年12月12日(2011.12.12)
【分割の表示】特願2005−158667(P2005−158667)の分割
【原出願日】平成17年5月31日(2005.5.31)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願日】平成23年12月12日(2011.12.12)
【分割の表示】特願2005−158667(P2005−158667)の分割
【原出願日】平成17年5月31日(2005.5.31)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]