
ナビゲーション装置、診断方法および診断プログラム
【課題】プロセッサの処理負荷を過大とすることなく診断を行う技術の提供。
【解決手段】少なくとも一つのナビゲーション機能を実行するプロセッサと、車両走行中における前記プロセッサの最大処理負荷が所定の基準よりも低くなる低処理負荷期間を推定する期間推定手段と、前記低処理負荷期間に応じて前記ナビゲーション機能の診断を行う診断手段と、を備えるナビゲーション装置。
【解決手段】少なくとも一つのナビゲーション機能を実行するプロセッサと、車両走行中における前記プロセッサの最大処理負荷が所定の基準よりも低くなる低処理負荷期間を推定する期間推定手段と、前記低処理負荷期間に応じて前記ナビゲーション機能の診断を行う診断手段と、を備えるナビゲーション装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置を診断する技術に関する。
【背景技術】
【0002】
従来、車両停車中において車両の外部電源よりバッテリが充電されていることを条件として診断を許可する車両診断方法が提案されている(特許文献1、参照。)。
かかる構成によれば、バッテリが充電されている状態で診断を行うことができ、診断に大きな電力を要する場合でもバッテリの残電力量がなくなることが防止できる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−32431号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術では、車両停車中に車両の外部電源よりバッテリへの充電が可能な電気自動車等の車両に対する診断を前提としているため、このような外部電源からの充電設備を備えていない車両に対しては、車両停車中に診断を実行してしまうとバッテリの残電力量がなくなってしまうという問題があった。一方、車両走行中にナビゲーション装置の機能の診断を実行するようにした場合、車両走行中におけるエンジンの駆動によりバッテリの充電を行うことが可能となるが、車両走行中はナビゲーション装置が起動しているため、ナビゲーション装置のプロセッサの処理負荷が過大となり、不具合が生じ得る。
本発明は、前記課題にかんがみてなされたもので、プロセッサの処理負荷を過大とすることなく診断を行う技術の提供を目的とする。
【課題を解決するための手段】
【0005】
前記目的を達成するため、本発明のナビゲーション装置は期間推定手段を備える。この期間推定手段は、車両走行中におけるプロセッサの最大処理負荷が所定の基準よりも低くなる低処理負荷期間を推定する。すなわち、期間に属する各時刻におけるプロセッサの処理負荷のうち最も高い処理負荷である最大処理負荷が所定の基準よりも低くなる期間を、低処理負荷期間として推定する。そして、診断手段は、低処理負荷期間に応じてナビゲーション機能の診断を行う。これにより、プロセッサの最大処理負荷が所定の基準よりも低くなる期間においてナビゲーション機能の診断を実行することができる。すなわち、プロセッサの最大処理負荷が高くなり得る期間において診断を実行することが防止でき、ナビゲーション機能の診断中においてプロセッサの処理負荷が一時的に過大となることによる不具合が防止できる。車両走行中において診断を行うことができるため、車両走行中に診断する必要があるナビゲーション機能も診断できる。
【0006】
期間推定手段は、種々の情報に基づいて低処理負荷期間を推定することができる。例えば、期間推定手段は、ナビゲーション装置、ナビゲーション装置の周辺機器、ナビゲーション装置が備えられた車両、車両の周囲環境等に関する状況を示す情報に基づいて低処理負荷期間を推定することができる。ナビゲーション装置に関する状況を示す情報に基づいて低処理負荷期間を推定すれば、直接的にナビゲーション装置のプロセッサについての低処理負荷期間を推定することができる。一方、周辺機器や車両や周囲環境等に関する状況を示す情報に基づいて当該状況に依存したユーザのナビゲーション装置の動作が推定できるため、間接的に低処理負荷期間を推定できる。
【0007】
さらに、期間推定手段は、過去のナビゲーション装置等の状況を示す情報に基づいて低処理負荷期間を推定してもよいし、現在のナビゲーション装置等の状況を示す情報に基づいて低処理負荷期間を推定してもよい。過去のナビゲーション装置等の状況を示す情報によれば、プロセッサの最大処理負荷が低くなった過去の期間を特定することができ、当該期間に対応する期間を低処理負荷期間として推定することができる。ここで、過去においてプロセッサの最大処理負荷が低くなった期間に対応する期間とは、過去においてプロセッサの最大処理負荷が低くなった期間を示す年,月,日(曜日、平日、祝休日も含む。),時,分等のいずれかが一致または類似する期間を意味する。一方、現在のナビゲーション装置等の状況を示す情報によれば、プロセッサの最大処理負荷が低くなる将来の期間をナビゲーション装置等の現在の状況に基づいて推定することができる。従って、高い確度で低処理負荷期間を推定できる。
【0008】
診断手段は、低処理負荷期間に応じてナビゲーション機能を診断すればよく、現在が低処理負荷期間であることをもって即座に診断を開始させてもよいし、将来の低処理負荷期間において診断を行うように予め設定してもよい。
また、診断手段は、複数のナビゲーション機能のうちの少なくとも一つを診断すればよく、すべてのナビゲーション機能を一括して診断してもよいし、各ナビゲーション機能を個別に診断してもよい。例えば、将来の複数の低処理負荷期間のそれぞれにおいて診断させるナビゲーション機能を配分してもよい。なお、ナビゲーション機能は車両走行中に実行される機能であればよく、経路案内を行う機能に限定されない。例えば、ナビゲーション機能は、現在位置や車速等の車両の走行状況を監視する機能や、地図を表示させる機能であってもよい。
診断手段は、ナビゲーション機能の診断結果を示す診断情報を、ナビゲーション装置が備える記録媒体に記録してもよい。これにより、メンテナンス時において診断情報を前記記録媒体から読み出して解析することができる。また、診断手段は、診断情報を所定の通信回線を介してサーバ等に送信してもよい。これにより、診断情報を前記サーバにて解析することができる。
【0009】
また、期間推定手段は、車両が走行する区間を所定単位で区分した単位区間を走行する期間におけるプロセッサの最大処理負荷を推定し、当該推定したプロセッサの最大処理負荷が所定の基準よりも低くなる場合に、当該単位区間を走行する期間を低処理負荷期間として推定してもよい。ナビゲーション機能の多くの処理状況は、車両の走行状況等に応じて動的に変化する。従って、車両が走行する区間を所定単位で区分した単位区間ごとに、プロセッサの最大処理負荷を推定し、低処理負荷期間と推定することにより、車両の走行状況等に応じて動的に変化するプロセッサの最大処理負荷に応じた低処理負荷期間が設定できる。なお、単位区間は、車両が走行する区間を所定の単位距離で区分した区間であってもよいし、車両が走行する区間を所定の単位リンク数のリンクで区分した区間であってもよいし、車両が走行する区間を所定の単位期間で走行される距離で区分した区間であってもよい。
【0010】
さらに、期間推定手段は、単位区間の進入時と退出時とで共通の画像データに基づいて表示部にて表示ができる場合に、当該単位区間を車両が走行する期間を低処理負荷期間として推定してもよい。単位区間の進入時と退出時とで共通の画像データに基づいて表示部にて表示ができる場合、当該単位区間を走行する期間に新たな画像データを生成する必要がないからである。例えば、単位区間の退出時において分岐地点や交差点や渋滞区間等に所定距離以内まで接近する場合には、当該分岐地点等の案内を行うための新たな画像データを、単位区間を走行する期間に生成する必要がある。従って、期間推定手段は、単位区間の進入時と退出時とで車両が所定距離以内まで接近する分岐地点等に変化がない場合に、当該単位区間を車両が走行する期間を低処理負荷期間として推定してもよい。さらに、単位区間の進入時と退出時のそれぞれにおける車両の現在位置や車両の方向に応じた地図を画像データに基づいて表示する構成において、単位区間の進入時と退出時とで共通の画像データに基づいて表示部にて表示ができる場合には、当該単位区間を車両が走行する期間を低処理負荷期間として推定してもよい。
【0011】
多くの場合、ユーザの操作に応じてプロセッサが処理を実行することによりプロセッサの処理負荷が高くなるため、ナビゲーション装置がユーザから操作を受け付けない期間は、プロセッサの最大処理負荷が低い低処理負荷期間であるということができる。従って、ナビゲーション装置がユーザから操作を受け付けない可能性が所定の基準よりも大きい期間を低処理負荷期間として推定できる。ナビゲーション装置がユーザから操作を受け付けない可能性が所定の基準よりも大きい低処理負荷期間を、例えば過去においてナビゲーション装置がユーザから操作を受け付けなかった頻度や確率が所定の基準よりも大きい期間に対応する期間としてもよい。ユーザによるナビゲーション装置の使用には時間的規則性があるため、過去においてナビゲーション装置がユーザから操作を受け付けなかった頻度や確率が大きい期間に対応する期間においては、プロセッサの最大処理負荷は低くなると考えられるからである。
【0012】
さらに、ナビゲーション装置がユーザから操作を受け付けない可能性が所定の基準よりも大きい低処理負荷期間を、車両の走行状況に基づいて推定してもよい。車両の走行状況に応じてユーザがナビゲーション装置を操作しようとする意図が生じ得るため、車両の走行状況に基づいてナビゲーション装置がユーザから操作を受け付けない可能性が所定の基準よりも大きい低処理負荷期間が推定できる。例えば、ユーザがナビゲーション装置に案内を期待する分岐地点等に車両が所定距離以内まで接近する前と後では、接近した後の方が当該分岐地点等の案内を得ようとしてユーザがナビゲーション装置を操作する可能性が高い。従って、分岐地点等に車両が所定距離以内まで接近する前の期間を、低処理負荷期間として推定してもよい。
【0013】
また、ナビゲーション装置が案内を行わない期間では、案内を行うことにより生じるプロセッサの処理負荷が軽減される。従って、ナビゲーション装置が案内を行わない可能性が所定の基準よりも大きい期間を低処理負荷期間として推定できる。ナビゲーション装置が案内を行わない可能性が所定の基準よりも大きい低処理負荷期間を、過去においてナビゲーション装置が案内を行わなかった頻度や確率が所定の基準よりも大きい期間に対応する期間としてもよい。ナビゲーション装置による案内の実行には時間的規則性があるからである。
【0014】
さらに、ナビゲーション装置が案内を行わない可能性が所定の基準よりも大きい低処理負荷期間を、車両の走行状況に基づいて推定してもよい。ユーザがナビゲーション装置に何らかの案内を行わせようとする意図は、車両の走行状況に応じて生じ得るため、車両の走行状況に基づいてナビゲーション装置が案内を行わない可能性が所定の基準よりも大きい低処理負荷期間が推定できる。例えば、ユーザにとって馴染みのある地域や走行経路を車両が走行する期間では、ナビゲーション装置に案内を行わせずとも車両を走行させることができるため、当該期間を低処理負荷期間として推定できる。さらに、ユーザがナビゲーション装置に案内を期待する分岐地点や交差点や地物や渋滞区間に車両が所定距離以内まで接近する前と後では、接近した後の方が当該分岐地点等の案内をナビゲーション装置に行わせる可能性が高い。従って、分岐地点等に車両が所定距離以内まで接近する前の期間を、低処理負荷期間として推定してもよい。
【0015】
さらに、ユーザにとって馴染みのある地域や走行経路を車両の過去の走行履歴に基づいて特定してもよい。例えば、過去において車両が走行した頻度が所定の基準よりも大きい地域や走行経路を、ユーザにとって馴染みのある地域や走行経路として推定し、当該地域や走行経路を走行する期間を低処理負荷期間として推定してもよい。
【0016】
さらに、通勤経路や通学経路のように馴染みのある走行経路を車両が走行するタイミングは規則的である場合が多い。例えば、通勤経路や通学経路が走行されるのは、通常、通勤時間帯や通学時間帯となる。従って、過去において車両が同一の走行経路を走行した頻度が所定の基準よりも大きい期間に対応する期間を低処理負荷期間として推定してもよい。かかる構成においては、車両がどの道路を走行するかを特定しなくても済む。なお、同一の走行経路とは、実質的に同一の走行経路を含み、例えば出発地と終着地とが共通する場合や、走行経路を構成する道路(リンク)が所定の比率以上共通する場合や、一方の走行経路に他方の走行経路が含まれる場合等を含んでもよい。
【0017】
ところで、ナビゲーション機能の診断にはある程度の時間を要する場合があるため、ナビゲーション機能の診断が終了する前にプロセッサの最大処理負荷が高くなり得る期間へと移行する場合も考えられる。このような場合、プロセッサの過大な処理負荷による不具合が生じ得る。そのため、診断手段は、低処理負荷期間内にナビゲーション機能の診断が終了する場合に限り、ナビゲーション機能の診断を行うのが望ましい。
一方、ナビゲーション機能の診断に要する期間が短い場合等には、診断を開始する時刻が低処理負荷期間に属することのみをもって診断を実行するようにしてもよい。
また、複数のナビゲーション機能に応じて診断に要する期間が異なる場合には、低処理負荷期間内に診断を終了させることが可能なナビゲーション機能を選択して診断すればよい。これにより、短い低処理負荷期間も無駄にすることなくナビゲーション機能の診断を行うことができる。
【0018】
さらに、本発明のように低処理負荷期間を推定して診断を行う手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0019】
【図1】診断システムのブロック図である。
【図2】低処理負荷期間を示す模式図である。
【図3】診断制御処理を示すフローチャートである。
【図4】地図のヘディングアップ表示する様子の説明図である。
【図5】他の変形例にかかる診断制御処理のフローチャートである。
【発明を実施するための形態】
【0020】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)第1実施形態にかかるナビゲーション装置の構成:
(2)診断制御処理:
(3)他の実施形態:
【0021】
(1)第1実施形態にかかるナビゲーション装置の構成:
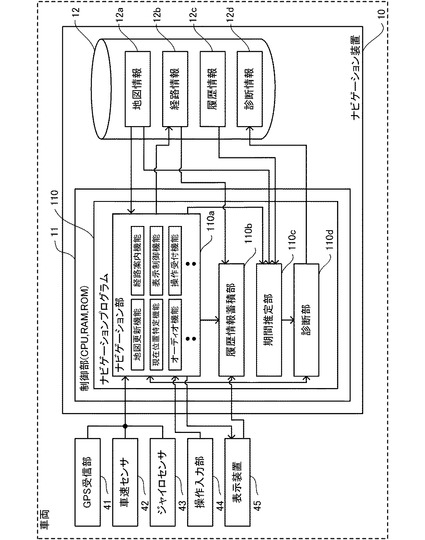
図1は、本発明の第1実施形態にかかるナビゲーション装置10の構成を示すブロック図である。ナビゲーション装置10は車両に備えられる。ナビゲーション装置10は、プロセッサとしてのCPUとRAMとROM等を備える制御部11と記録媒体12とを備えている。記録媒体12には、地図情報12aと経路情報12bと履歴情報12cと診断情報12dとが記録されている。ナビゲーション装置10は、記録媒体12やROMに記憶された各種プログラムの実行データを読み出して制御部11で実行する。本実施形態において、制御部11は、ナビゲーションプログラム110を実行する。
【0022】
地図情報12aには車両が走行する道路上に設定されたノードを示すノードデータ、ノード間の道路の形状を特定するための形状補間データ、ノード同士の連結を示すリンクデータ等が含まれている。ノードデータが示すノードには、交差点等に対応するノードが含まれている。経路情報12bは、車両が走行する走行予定経路がナビゲーションプログラム110の機能によって設定された場合に記録される情報であり、当該走行予定経路上に設定されたノード等を特定する。履歴情報12cは、ナビゲーション装置10の電源がオンとなっている期間において、ナビゲーション装置10が経路案内を行っていなかった期間を特定する情報である。
【0023】
車両は、GPS受信部41と車速センサ42とジャイロセンサ43と操作入力部44と表示部としての表示装置45とを備えている。GPS受信部41は、GPS衛星から電波を受信し、図示しないインタフェースを介して車両の現在位置を算出するための信号を出力する。車速センサ42は、車両が備える車輪の回転速度に対応した信号を出力する。ジャイロセンサ43は、車両に作用する角速度に対応した信号を出力する。制御部11は図示しないインタフェースを介してこの信号を取得し、車両の方向を取得する。制御部11は、GPS受信部41の出力信号から特定される車両の現在位置を、車速センサ42とジャイロセンサ43等からの信号に基づいて補正する。
【0024】
操作入力部44は、ユーザがナビゲーション装置10に対する操作を行うためのインタフェース部であり、図示しない操作パネルやタッチセンサやリモコン等を備えている。表示装置45は、制御部11が表示制御を行うことによってユーザに表示画像を介して各種の情報を提供するインタフェース部である。表示装置45は、図示しない液晶パネル等を備えている。
【0025】
ナビゲーションプログラム110は、ナビゲーション部110aと履歴情報蓄積部110bと期間推定部110cと診断部110dとを含む。ナビゲーション部110aと履歴情報蓄積部110bと期間推定部110cと診断部110dとは、図示しないOS上で実行され、当該OSによって各プログラムモジュール110a〜110dが使用する制御部11のCPUやRAM等のハードウェアリソースが割り当てられる。また、OSは、各プログラムモジュール110a〜110dを時分割して制御部11に実行させることにより、各プログラムモジュール110a〜110dを見かけ上、並列して実行させる。
【0026】
ナビゲーション部110aは、複数のナビゲーション機能(例えば、地図更新機能,経路案内機能,現在位置特定機能,操作受付機能,表示制御機能,オーディオ機能等)のうち少なくとも一つを制御部11に実行させる。このうち、現在位置特定機能と地図更新機能と経路案内機能とは走行中にて刻々と変化する車両の現在位置に応じた処理を実行する。現在位置特定機能により制御部11は、車速センサ42やジャイロセンサ43の出力信号に基づいて走行中の車両の走行軌跡を作成し、地図情報12aを参照して、当該走行軌跡と形状がマッチングする道路を特定する。そして、現在位置特定機能により制御部11は、走行軌跡と形状がマッチングする道路の位置に基づいて、GPS受信部41の出力信号に基づく車両の現在位置を補正する。地図更新機能により制御部11は、表示装置45に表示させる地図を車両の現在位置や車両の方向の変化に追従するように更新する機能であり、車両の現在位置や車両の方向に応じて地図を表示するための画像データを生成する。一方、経路案内機能により制御部11は、目的地等に基づいて走行予定経路を探索し、当該走行予定経路を特定する経路情報12bを記録媒体12に記録する。さらに、経路案内機能により制御部11は、走行予定経路を走行させるための経路案内を車両の現在位置等に応じて行う。また、経路案内機能により制御部11は、車両が走行予定経路の目的地に到達した場合や、走行予定経路の案内がユーザの操作によって中止された場合には、経路情報12bを記録媒体12から消去する。
【0027】
履歴情報蓄積部110bは、ナビゲーション装置10が走行予定経路の経路案内を行っていない期間である非経路案内期間を履歴情報12cに記録する機能を制御部11に実行させるプログラムモジュールである。すなわち、履歴情報蓄積部110bの機能により制御部11は、ナビゲーション装置10の電源がオンとなっている期間において記録媒体12における経路情報12bの記録有無を監視し、経路情報12bが記録されていない期間を非経路案内期間とし、当該非経路案内期間の開始時刻および終了時刻を履歴情報12cに記録する。すなわち、非経路案内期間の開始時刻および終了時刻を表す年,月,日(曜日),時,分等が履歴情報12cにおいて特定される。なお、現在時刻から所定期間以上過去の非経路案内期間については履歴情報12cから順次消去してもよい。
【0028】
期間推定部110cは、CPUの最大処理負荷が所定の基準よりも低くなる低処理負荷期間を推定する機能を制御部11に実行させるプログラムモジュールである。すなわち、期間推定部110cの機能により制御部11は、過去においてナビゲーション装置10が経路案内機能による経路案内を行っていなかった頻度が所定の基準よりも大きい期間に対応する期間を低処理負荷期間として推定する。なお、ナビゲーション装置10が経路案内機能による経路案内を行う期間においては、多くの処理が実行されるため、走行状況等に応じてCPUの処理負荷がナビゲーション機能の診断に支障を来す程度に高くなる場合が一時的に生じ得る。
【0029】
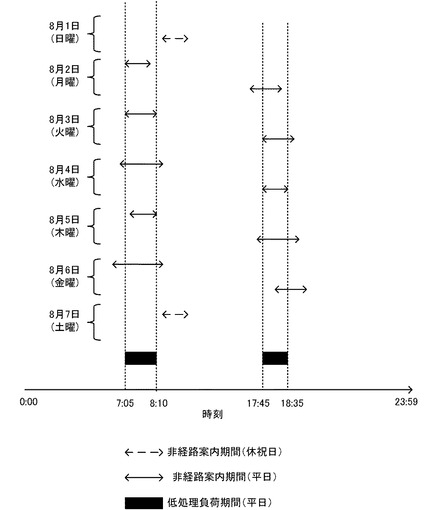
図2は、低処理負荷期間を模式的に説明する図である。期間推定部110cの機能により制御部11は、履歴情報12cにて特定された各非経路案内期間の年,月,日(曜日)に基づいて、各非経路案内期間を平日と祝休日とに振り分ける。図2においては、平日に振り分けられた非経路案内期間を実線矢印で示し、祝休日に振り分けられた非経路案内期間を破線矢印で示している。図2の横軸は、0時00分から23時59分までの時刻を示している。期間推定部110cの機能により制御部11は、4個以上の非経路案内期間が重複している時間帯を平日と祝休日のそれぞれについて抽出し、当該時間帯を平日または祝休日についての低処理負荷期間(図2にて黒く塗りつぶした時間帯)として推定する。すなわち、本実施形態では、過去において基準の4回以上の頻度で、ナビゲーション装置10の電源がオンにも拘わらずナビゲーション装置10が経路案内を行っていない期間を低処理負荷期間として推定する。本実施形態において、過去において所定の基準よりも大きい頻度でナビゲーション装置10が経路案内を行っていなかった期間と、低処理負荷期間とは、これらの期間を表す時,分が互いに一致する。
【0030】
図2の例では、平日についてのみ低処理負荷期間が推定されている。また、図2に示す低処理負荷期間は、平日において自宅から勤務地へと走行する出勤時間帯(7時5分から8時10分までの1時間5分)と、平日において勤務地から自宅へと走行する帰宅時間帯(17時45分から18時35分までの50分)とに対応している。通勤経路は、ユーザにとって馴染みがあるため、ナビゲーション装置10に経路案内を行わせずともユーザは車両を走行させることができる経路であるということができる。このように、ナビゲーション装置10の電源がオンにも拘わらずナビゲーション装置10が経路案内を行っていない期間は、時間的規則性を有している場合が多いため、過去において大きい頻度でナビゲーション装置10が経路案内を行っていない期間に対応する期間を低処理負荷期間と推定できる。一方、図2の例では、休祝日におけるユーザの行動に時間的規則性が乏しく、休祝日については低処理負荷期間が推定されていない。むろん、休祝日においても定期的な外出等がある場合には、休祝日についても低処理負荷期間期間が推定され得る。また、本実施形態では、4回以上の頻度を基準として低処理負荷期間期間を推定することとしたが、所定の確率を基準として低処理負荷期間期間を推定してもよい。例えば、図2の低処理負荷期間期間は、8月2日〜8月6日の5日間の平日において基準の4回以上の頻度でナビゲーション装置10が経路案内を行っていなかった期間であるとともに、5日間の平日におい80%以上の確率でナビゲーション装置10が経路案内を行っていなかった期間でもある。
【0031】
診断部110dは、低処理負荷期間内にナビゲーション機能の診断が終了するか否かを判断し、低処理負荷期間内にナビゲーション機能の診断が終了する場合に、ナビゲーション機能の診断を行う機能を制御部11に実行させるプログラムモジュールである。すなわち、診断部110dの機能により制御部11は、現在時刻が平日にあたるか祝休日にあたるかを判定し、平日にあたる場合には平日についての低処理負荷期間の時間帯に現在時刻(時,分)が属するか否かを判定する。同様に、現在時刻が祝休日にあたる場合には祝休日についての低処理負荷期間の時間帯に現在時刻(時,分)が属するか否かを判定する。低処理負荷期間に現在時刻が属する場合には、現在時刻が属する低処理負荷期間の終了までに上述の選択したナビゲーション機能の診断が終了するか否かを判定する。すなわち、低処理負荷期間内にナビゲーション機能の診断が終了するか否かを判定する。本実施形態では、CPUが経路案内機能を実行しない(経路案内を行わない)状況でCPUの処理負荷が一時的に高くなっても、ナビゲーション機能(地図更新機能,経路案内機能,現在位置特定機能…)のいずれの診断も実行可能なCPUの空き処理負荷を確保することができることとする。診断部110dの機能により制御部11は、複数のナビゲーション機能のうち最も過去に診断を行ったナビゲーション機能を選択し、当該選択した機能の診断が低処理負荷期間の終了までに終了するか否かを判定する。
【0032】
低処理負荷期間の終了までに選択したナビゲーション機能の診断が終了する場合には、診断部110dの機能により制御部11は、選択したナビゲーション機能の診断を実行する。選択したナビゲーション機能が実行されている場合には、選択したナビゲーション機能を一旦停止させた上で、所定の診断条件の下で選択したナビゲーション機能をテスト動作させて診断を行う。診断部110dの機能により制御部11は、テスト動作中において制御部11におけるCPUのレジスタやキャッシュやRAMに記憶されたデータを取得し、当該データを診断情報12dとして記録媒体12に記憶させる。
【0033】
以上説明したように、本実施形態によれば、CPUの最大処理負荷が高くなるタイミングで診断を実行することが防止でき、CPUの過大な処理負荷による不具合が防止できる。また、診断手段は、低処理負荷期間内にナビゲーション機能の診断が終了する場合にナビゲーション機能の診断を行うため、ナビゲーション機能の診断が終了する前にCPUの最大処理負荷が高くなる事態が防止できる。車両走行中における低処理負荷期間にてナビゲーション機能の診断を行うため、車両走行中にて刻々と変化する現在位置や車速等を利用するナビゲーション機能(現在位置特定機能,地図更新機能,経路案内機能)も診断できる。
【0034】
ここで、ユーザがナビゲーション装置10に経路案内を行わせる時間帯には規則性があるため、過去においてナビゲーション装置10が経路案内を行わなかった頻度が大きかった期間に対応する期間においては、プロセッサの最大処理負荷は低くなると考えられる。従って、過去においてナビゲーション装置10が経路案内を行わなかった頻度が所定の基準(例えば、4回。)よりも大きい期間に対応する期間を低処理負荷期間として推定し、当該低処理負荷期間に応じて診断を行うようにすることにより、CPUの過大な処理負荷による不具合が防止できる。
【0035】
(2)診断制御処理:
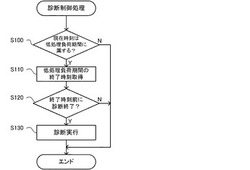
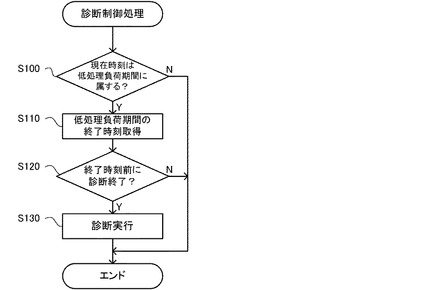
図3は、診断制御処理を示すフローチャートである。なお、診断制御処理は、ナビゲーション機能の診断中の期間を除き、所定の時間周期ごとに実行される処理である。むろん、診断制御処理は、ナビゲーション装置10の電源がオンとなっている期間において実行される。ステップS100において、診断部110dの機能により制御部11は、現在時刻が低処理負荷期間に属するか否かを判定する。すなわち、現在時刻が平日であるか祝休日のいずれにあたるかを判定し、平日または祝休日に対応する低処理負荷期間の時間帯に現在時刻(時,分)が属するか否かを判定する。なお、ステップS100において現在時刻が低処理負荷期間に属するか否かを判定するにあたり、期間推定部110cの機能により制御部11は、最新の履歴情報12cに基づいて低処理負荷期間を推定しておく。
【0036】
現在時刻が低処理負荷期間に属さない場合、制御部11は、診断制御処理を終了させ、次に診断制御処理を実行するまで待機する。一方、現在時刻が低処理負荷期間に属する場合、ステップS110において、診断部110dの機能により制御部11は、現在時刻が属する低処理負荷期間の終了時刻を取得する。ステップS120において、診断部110dの機能により制御部11は、最も過去に診断したナビゲーション機能を選択し、現在時刻が属する低処理負荷期間の終了時刻までに選択したナビゲーション機能の診断が終了するか否かを判定する。各ナビゲーション機能を診断するための診断所要期間は実験等により予め特定されており、診断部110dの機能により制御部11は、ナビゲーション機能を診断するための診断所要期間が取得可能である。なお、低処理負荷期間の終了時刻までに、選択したナビゲーション機能の診断が終了するか否かは、低処理負荷期間の終了時刻と、現在時刻に診断所要期間を加えた診断終了予定時刻との比較によって判定することができる。少なくとも低処理負荷期間の終了時刻までに診断が終了することが判定できればよく、低処理負荷期間の終了時刻の所定時間前に、選択したナビゲーション機能の診断が終了するか否かを判定してもよい。これにより、十分な時間的余裕をもって診断が終了できるか否かが判定できる。
【0037】
現在時刻が属する低処理負荷期間の終了時刻までに、選択したナビゲーション機能の診断が終了しないと判定した場合、制御部11は診断制御処理を終了させ、次に診断制御処理を実行するまで待機する。一方、現在時刻が属する低処理負荷期間の終了時刻までに、選択したナビゲーション機能の診断が終了すると判定した場合、ステップS130において、診断部110dの機能により制御部11は、選択したナビゲーション機能の診断を順次実行する。すなわち、選択したナビゲーション機能を順次テスト動作させ、そのときCPUのレジスタやキャッシュやRAMに記録されたデータを診断情報12dとして記録媒体12に記憶させる。なお、診断実行時において、診断中のナビゲーション機構に関する操作の受付を制限するとともに、表示装置45にて診断中である旨を表示させるのが望ましい。
【0038】
(3)他の実施形態:
(3−1)期間推定手法の変形例:
本発明の期間推定手段は種々の情報に基づいて低処理負荷期間を推定することができる。例えば、期間推定部110cの機能により制御部11は、ナビゲーション装置、ナビゲーション装置の周辺機器、ナビゲーション装置が備えられた車両、周囲環境等に関する過去または現在の状況を示す情報に基づいて低処理負荷期間を推定することができる。ナビゲーション装置に関する状況を示す情報に基づいてナビゲーション装置の使用状況が推定できるため、直接的にナビゲーション装置についての低処理負荷期間を推定することができる。一方、周辺機器や車両や周囲環境等に関する状況を示す情報に基づいて、当該状況に依存したユーザの行動が推定できるため、間接的にナビゲーション装置についての低処理負荷期間を推定することができる。
【0039】
さらに、期間推定部110cの機能により制御部11は、前記実施形態の履歴情報12bのように過去のナビゲーション装置等の状況を示す情報に基づいて低処理負荷期間を推定してもよいし、現在のナビゲーション装置等の状況を示す情報に基づいて低処理負荷期間を推定してもよい。過去のナビゲーション装置等の状況を示す情報によれば、CPUの最大処理負荷が低くなった過去の期間を特定することができ、当該期間に対応する期間を低処理負荷期間として推定することができる。現在のナビゲーション装置等の状況を示す情報によれば、CPUの最大処理負荷が低くなる将来の期間をナビゲーション装置等の現在の状況に基づいて推定することができる。従って、高い確度で低処理負荷期間を推定できる。
以下、期間推定手法の変形例を具体的な実施形態を挙げて説明する。
【0040】
(3−1−1)ナビゲーション装置に対する操作履歴に基づく推定:
本変形例において、履歴情報蓄積部110bの機能により制御部11は、ナビゲーション装置10の電源がオンとなっている期間においてナビゲーション装置10が操作を受け付けなかった期間(以下、非操作受付期間と表記する。)の開始時刻および終了時刻を履歴情報12cに記録する。非操作受付期間とは、例えばナビゲーション装置10の操作入力部44にて何らかの操作が受け付けられた時刻の前後所定期間を除く期間とされる。例えば、前記所定期間を5分とし、10時00分に操作が受け付けられた場合には、9時55分〜10時05分を除く期間が非操作受付期間となる。さらに、引き続いて10時03分に操作が受け付けられた場合には、9時55分〜10時08分を除く期間が非操作受付期間とされる。
【0041】
以上のようにして履歴情報12cが記録された状態において、期間推定部110cの機能により制御部11は、前記実施形態と同様の手法により低処理負荷期間を推定する。すなわち、過去において所定の基準(例えば、3回。)よりも大きい頻度で、ナビゲーション装置10の電源がオンにもかかわらずナビゲーション装置10が操作を受け付けていない期間を低処理負荷期間として推定する。低処理負荷期間が推定できると、診断部110dの機能により制御部11は、前記実施形態と同様の判定を行ってナビゲーション機能の診断を実行する。
【0042】
多くの場合、ユーザの操作に応じてプロセッサが処理を実行することにより、CPUの処理負荷が高くなるため、ナビゲーション装置10がユーザから操作を受け付けない期間は、ナビゲーション装置10のCPUの最大処理負荷が低くなる低処理負荷期間であるということができる。さらに、ユーザによるナビゲーション装置10の使用時間帯には規則性があるため、過去においてナビゲーション装置10がユーザから操作を受け付けなかった頻度が大きい期間に対応する期間においては、CPUの最大処理負荷は低くなると考えられる。従って、過去においてナビゲーション装置10がユーザから操作を受け付けなかった頻度が所定の基準よりも大きかった期間に対応する期間を低処理負荷期間として推定し、当該低処理負荷期間に応じて診断を行うようにすれば、CPUの過大な処理負荷による不具合が防止できる。
【0043】
(3−1−2)表示装置に対する操作履歴に基づく推定:
本変形例において、履歴情報蓄積部110bの機能により制御部11は、ナビゲーション装置10の電源がオンとなっている期間において表示装置45の電源がオフとなっていた期間である表示オフ期間の開始時刻および終了時刻を履歴情報12cに記録する。例えば、履歴情報蓄積部110bの機能により制御部11は、図示しない信号線を介して表示装置45の電源状態を監視し、表示装置45の電源状態がオンからオフに転じた時刻を表示オフ期間の開始時刻とし、表示装置45の電源状態がオフからオンに転じた時刻を表示オフ期間の終了時刻とする。
【0044】
以上のようにして履歴情報12cが記録された状態において、期間推定部110cの機能により制御部11は、前記実施形態と同様の手法により低処理負荷期間を推定する。低処理負荷期間が推定できると、診断部110dの機能により制御部11は、前記実施形態のステップS110〜S120と同様の判定を行ってナビゲーション機能の診断を実行する。表示オフ期間は、ナビゲーション装置10の電源がオンとなっているにも拘わらず表示装置45がオフされた期間であり、ナビゲーション装置10における表示制御機能が実行されないとともに、ユーザの操作により他のナビゲーション機能が実行されている可能性が低く、CPUの最大処理負荷が低くなる期間であると推定できる。従って、低処理負荷期間を高い確度で推定できる。
【0045】
(3−1−3)車両の現在の走行状況に基づく推定:
以上においては、ナビゲーション装置10または表示装置45の過去の状況を示す履歴情報12cに基づいて低処理負荷期間を推定する例を示したが、車両の現在の状況を示す情報に基づいて低処理負荷期間を推定してもよい。本変形例においては、期間推定部110cの機能により制御部11は、GPS受信部41からの出力信号等に基づいて車両の現在位置を取得する。そして、期間推定部110cの機能により制御部11は、現在位置と地図情報12aとに基づいて車両が現在走行する道路、および、当該道路における車両の走行方向を取得する。期間推定部110cの機能により制御部11は、現在走行している道路を車両が道なりに走行した場合に、最初に到達する分岐地点(交差点)に所定距離(例えば、50m等。)以内まで接近すると推定される接近予定時刻が現在時刻から所定期間(例えば、3分。)以上経過後であれば、現在時刻から接近予定時刻までの期間を低処理負荷期間とする。すなわち、車両が現在から所定期間以上にわたって次の分岐地点に接近しない場合には、現在時刻から接近予定時刻までの期間を低処理負荷期間とする。なお、接近予定時刻は、現在位置と分岐地点との距離と車速センサ42の出力信号に基づく車速等に基づいて得ることができる。低処理負荷期間が推定できると、診断部110dの機能により制御部11は、前記実施形態のステップS110〜S120と同様の判定を行ってナビゲーション機能の診断を実行する。
【0046】
以上説明した低処理負荷期間は、道路上に分岐地点が広い間隔でしか存在しない高速道路や有料道路等を走行する場合において特に推定され得る。車両が分岐地点の所定距離以内に接近するタイミング、すなわちユーザが分岐地点やその標識を視認するタイミングにおいて、ユーザは分岐地点についての行き先等の情報を得ようとしてナビゲーション装置10を操作することが予測される。例えば、車両が分岐地点に接近するタイミングにおいて、ナビゲーション装置10が経路案内を行っている場合には分岐地点にて推奨される退出方向の案内や分岐地点付近の3D画像の表示を行うための処理負荷が発生し、ナビゲーション装置10が経路案内を行っていない場合にも分岐地点における行き先や車線等の情報の案内を行うための処理負荷が発生する。すなわち、本変形例においては、分岐地点に接近してナビゲーション装置10のCPUの最大処理負荷が高くなる前に、ナビゲーション機能の診断を実行しておくことができる。なお、時間的余裕をもってナビゲーション機能の診断が終了するように、接近予定時刻から所定期間前の時刻を低処理負荷期間の終了時刻としてもよい。
【0047】
ナビゲーション装置10にユーザの自宅や勤務地等が登録されている場合、これらの地点から所定距離以内の範囲の地域は生活圏であると推定できる。例えば、生活圏は自宅や勤務地等から所定半径以内の地域と定義しておく。そして、車両が生活圏の内側に存在する場合において車両が生活圏の外側に出ることができる最も早い時刻を推定し、当該時刻を低処理負荷期間の終了時刻としてもよい。例えば、車両が生活圏の外側に出ることができる最も早い時刻は、生活圏の外縁から現在位置までの最短距離を法定制限速度で除算した時間を現在時刻に加算することにより得ることができる。ユーザの生活圏ではナビゲーション装置10のナビゲーション機能を多く実行させずともユーザは車両を走行させることができると考えられるため、車両が生活圏の外側に出ることができる最も早い時刻よりも前の期間を低処理負荷期間として推定することができる。
【0048】
(3−1−4)車両の現在および過去の走行状況に基づく推定:
さらに、ユーザに馴染みのある地域や走行経路を過去の車両の走行履歴に基づいて推定してもよい。本変形例において、履歴情報蓄積部110bの機能により制御部11は、走行経路と走行時刻とを対応付けて履歴情報12cに記録する。以上のように履歴情報12cが記録された状態において、期間推定部110cの機能により制御部11は、所定の基準(例えば、5回。)よりも大きい頻度で走行された走行経路を抽出する。そして、期間推定部110cの機能により制御部11は、抽出した走行経路上を車両が走行中であるか否かを判定し、抽出した走行経路上を車両が走行中である場合には、現在、低処理負荷期間であると判定する。そして、期間推定部110cの機能により制御部11は、抽出した走行経路の終点に車両が到達する時刻を現在位置や車両の走行方向や車速等に基づいて予測し、当該時刻を低処理負荷期間の終了時刻とする。このようにすることにより、過去に何度か走行している走行経路においてユーザがナビゲーション装置10のナビゲーション機能を多く実行させずとも車両を走行させることができる期間において、ナビゲーション機能を診断することができる。
【0049】
ところで、通勤経路や通学経路のように走行する時間帯がほぼ一定となる走行経路については、車両が走行する道路を特定するまでもなく、通勤経路や通学経路を車両が走行していると推定できる。すなわち、期間推定部110cの機能により制御部11は、同一の走行経路が、同一時間帯において所定の基準(例えば、5回。)よりも大きい頻度で走行された時間帯を履歴情報12cから抽出する。なお、同一時間帯とは、平日であるか祝休日であるかが一致し、走行開始時刻(時,分)と走行終了時刻(時,分)とが所定の誤差範囲以内となることを指す。なお、同一の走行経路とは、実質的に同一の走行経路を含み、例えば出発地と終着地とが共通する場合や、走行経路を構成する道路(リンク)が所定の比率以上共通する場合や、一方の走行経路に他方の走行経路が含まれる場合等を含む。
【0050】
期間推定部110cの機能により制御部11は、抽出した時間帯を低処理負荷期間として推定する。そして、診断部110dの機能により制御部11は、現在時刻が低処理負荷期間に属し、かつ、当該低処理負荷期間の終了時刻までに選択したナビゲーション機能の診断が終了する場合には、選択したナビゲーション機能の診断を実行する。このようにすることにより、診断部110dの機能により制御部11は、車両が現在走行する道路を特定することなく、診断を実行するか否かを判定できる。むろん、本変形例において、診断部110dの機能により制御部11は、現在時刻が低処理負荷期間に属し、かつ、車両の現在位置が走行頻度の高い走行経路上にあることをもって、診断を実行するとしてもよい。
【0051】
(3−1−5)画像データの生成負荷に基づく推定:
ナビゲーション装置10が地図更新機能および表示制御機能により表示装置45に車両の現在位置付近の所定範囲の地図を表示させる場合、車両の現在位置の変化に追従するように、逐次、表示装置45に地図を表示させるための画像データを生成するためのCPUの処理負荷が発生する。車両の現在位置の変化態様は車両が走行する区間に依存するため、地図を表示させるための画像データを生成するCPUの処理負荷も車両が走行する区間に依存することとなる。特に、車両の現在位置の変化および車両の方向に追従するように地図を表示させるヘッディングアップ表示を行う場合には、画像データを生成するための処理負荷が区間の形状に大きく依存する。
【0052】
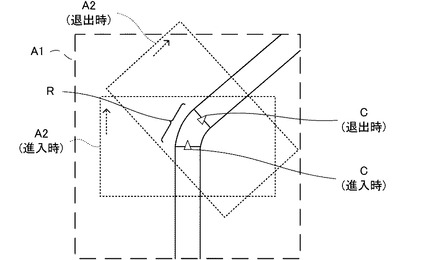
図4は、ヘッディングアップ表示を行う様子を模式的に示す図である。図4においては、車両Cが走行中の道路を現在位置から所定の単位距離(例えば、300m。)だけ道なり前方に走行した場合に走行される区間を単位区間Rとして示している。地図更新機能の機能により制御部11は、単位区間Rへの進入時において所定の地図生成領域A1についての地図を示す画像データを制御部11のRAMに記録している。そして、地図更新機能により制御部11は、単位区間Rへの進入時において地図生成領域A1のうち現在位置(単位区間Rの始点)を重心とし、車両の前方を領域上方(矢印で図示。)とした所定の地図表示領域A2について画像データを切り出す。そして、表示制御機能により制御部11は、地図表示領域A2について切り出した画像データを、領域上方が表示装置45の表示面の上側に表示されるように表示装置45にて表示させる。地図生成領域A1と地図表示領域A2とは矩形であり、地図表示領域A2よりも地図生成領域A1が大きい。地図表示領域A2よりも地図生成領域A1を大きくすることにより、車両Cの現在位置や車両Cの方向の変化に応じて地図表示領域A2の位置や角度が変化した場合でも、地図表示領域A2全体が地図生成領域A1に属する限りにおいては、地図生成領域A1に対応する画像データから地図表示領域A2に対応する部分を切り出して表示させることができる。すなわち、地図表示領域A2全体が地図生成領域A1に属する限りにおいては、地図を表示させるために地図情報12aに基づいて新たに画像データを生成する必要はない。一方、地図表示領域A2全体が地図生成領域A1に属さない場合においては、単位区間Rを走行する期間において新たに画像データを生成するタイミングが生じ、このタイミングにおいて一時的にCPUの処理負荷が高くなる。
【0053】
以上説明したヘッディングアップ表示を行う場合において、期間推定部110cの機能により制御部11は、単位区間Rの退出時における地図表示領域A2を地図情報12aに基づいて推定し、当該地図表示領域A2全体が地図生成領域A1に属するか否かを判定する。単位区間Rの退出時における地図表示領域A2は、単位区間Rが属する道路の形状補間データによって特定される単位区間Rの終点の位置と当該終点における道路の方向とに基づいて特定できる。単位区間Rの終点の位置は、地図表示領域A2の重心に対応し、単位区間Rの終点における道路の方向は地図表示領域A2の領域上方に対応する。期間推定部110cの機能により制御部11は、単位区間Rの退出時における地図表示領域A2全体が地図生成領域A1に属する場合には、当該単位区間Rを走行する期間を低処理負荷期間と推定する。退出時における地図表示領域A2全体が地図生成領域A1に属する場合、単位区間Rの進入時と退出時とで共通の画像データに基づいて表示装置45にて地図が表示でき、単位区間Rの退出時までに画像データを新たに生成する必要はない。従って、単位区間Rを走行する期間におけるCPUの処理負荷は低くなると推定できる。以上のようにして、低処理負荷期間が推定できると、診断部110dの機能により制御部11は、車両Cが単位区間Rの終点に到達する時刻を予測し、当該到達時刻までに診断が終了するナビゲーション機能の診断を実行する。
【0054】
ヘッディングアップ表示を行う場合、地図表示領域A2は車両Cの前方の方向に追従して回転するため、単位区間Rの退出時において地図表示領域A2全体が地図生成領域A1に属さなくなる場合が生じ得る。単位区間Rの進入時と退出時とでは車両Cの現在位置は単位距離しか変わらず、現在位置の変化、すなわち重心の位置の変化のみにより地図表示領域A2全体が地図生成領域A1に属さなくなる可能性は低い。しかし、ヘッディングアップ表示を行う場合、車両Cの前方の方向に応じて地図表示領域A2が回転するため、地図表示領域A2の一部が地図生成領域A1の外側となる場合が生じる。従って、進入角度と退出角度が所定の基準(例えば、30度。)よりも小さい単位区間Rを走行する期間を低処理負荷期間と推定するようにしてもよい。また、複数の単位区間Rによって構成される区間であって、進入角度と退出角度が所定の基準よりも小さい単位区間Rの構成比率が所定の基準よりも大きい区間を走行する期間を低処理負荷期間と推定するようにしてもよい。
【0055】
また、単位区間Rを走行する期間において、表示装置45にて表示させるための画像データを新たに生成する必要性が単位区間Rに依存して変動する場合は他にも考えられる。例えば、車両の現在位置から所定距離以内に分岐地点や交差点や地物や渋滞区間等が存在する場合に当該分岐地点等の案内を表示させる構成において、単位区間Rの始点から所定距離以内に分岐地点等が存在しないが、単位区間Rの終点から所定距離以内に分岐地点等が存在する場合には、単位区間Rを走行する期間において当該分岐地点等についての案内を表示させるための画像データを新たに生成する必要がある。単位区間Rへの進入時には分岐地点等の案内を含まない画像データに基づいて表示を行ない、単位区間Rからの退出時には分岐地点等の案内を含む画像データに基づいて表示を行うからである。反対に、単位区間Rの始点と終点とで所定距離以内に存在する分岐地点や交差点や地物や渋滞区間等に変化がない場合には、画像データを新たに生成する必要性が少なく、当該単位区間Rを走行する期間を低処理負荷期間と推定するようにしてもよい。
【0056】
さらに、単位区間Rは単位期間に走行する区間であってもよい。すなわち、期間推定部110cの機能により制御部11は、単位期間におけるプロセッサの最大処理負荷を推定し、当該推定したプロセッサの最大処理負荷が所定の基準よりも低くなる場合に、当該単位区間を車両が走行する単位期間を低処理負荷期間として推定してもよい。図4に示すように、地図表示領域A2全体が地図生成領域A1に含まれなくなる段階で地図を示す新たな画像データを生成する必要がある。地図生成領域A1は車両Cの現在位置に追従するため、ヘッディングアップ表示を行うか否かに拘わらず、車両Cの車速が大きいほど単位期間において新たな画像データを生成するための処理負荷が大きくなる。従って、車両Cの車速が所定の基準速度(例えば、30km/時。)である場合に、単位期間を低処理負荷期間と推定するようにしてもよい。
【0057】
(3−1−6)各推定手法の組み合わせ:
以上においては、種々の推定手法によって低処理負荷期間が推定できることを説明したが、これらの推定手法のうち2以上の推定手法を組み合わせもよい。例えば、診断部110dの機能により制御部11は、上述した各推定手法によって個別に推定された低処理負荷期間のそれぞれに現在時刻が属するか否かを判定してもよい。なお、種々の推定手法によって推定された低処理負荷期間ごとに、当該低処理負荷期間にてCPUの処理負荷が最も高くなったタイミングでのCPUの空き処理負荷は異なることとなる。さらに、複数の低処理負荷期間に該当する場合には、該当する低処理負荷期間の組み合わせごとに、CPUの処理負荷が最も高くなったタイミングでのCPUの空き処理負荷は異なることとなる。例えば、経路案内を行っていないと推定される低処理負荷期間に該当する場合と、経路案内を行っていないと推定される低処理負荷期間(第1実施形態、参照。)、および、画像データを新たに生成する必要のない単位区間Rを走行する期間である低処理負荷期間((3−1−5)、参照。)に該当する場合とでは、後者の方がCPUの空き処理負荷が大きくなる。
【0058】
本変形例においては、該当する低処理負荷期間の組み合わせごとに、CPUの空き処理負荷を規定したマップを記録媒体12に記録しておき、当該マップを参照することにより、制御部11は該当する低処理負荷期間の組み合わせに対応するCPUの空き処理負荷を取得する。さらに、各ナビゲーション機能の診断を行うために必要なCPUの処理負荷を規定したマップを記録媒体12に記録しておき、当該マップを参照することにより、制御部11は各ナビゲーション機能の診断を行うために必要なCPUの処理負荷を取得する。そして、診断部110dの機能により制御部11は、該当する低処理負荷期間の組み合わせに対応するCPUの空き処理負荷よりも小さいCPUの処理負荷で診断可能なナビゲーション機能の診断を実行させる。なお、CPUの空き処理負荷に、各ナビゲーション機能の診断を行うための診断所要期間が依存する場合も考えられる。従って、CPUの空き処理負荷と各ナビゲーション機能の診断所要期間との対応関係を規定したマップを記録媒体12に記録しておいてもよい。そして、診断部11dの機能により制御部11は、前記マップを参照して、CPUの空き処理負荷に依存した診断所要期間を取得し、当該診断所要期間に基づいて低処理負荷期間内に診断が終了するナビゲーション機能を選択して、当該ナビゲーション機能の診断を行ってもよい。
【0059】
(3−2)他の変形例:
前記実施形態では最も過去に診断したナビゲーション機能を診断することとしたが、ナビゲーション機能に応じて診断に要する期間が異なる場合には、低処理負荷期間内に診断を終了させることが可能なナビゲーション機能を選択して診断するようにしてもよい。これにより、短い低処理負荷期間も無駄にすることなくナビゲーション機能の診断を行うことができる。
【0060】
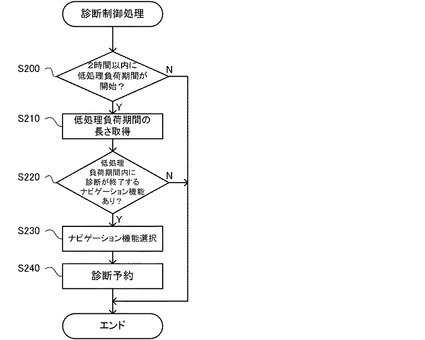
図5は他の変形例にかかる診断制御処理のフローチャートである。図5のステップS200において、診断部110dの機能により制御部11は、現在時刻から所定時間(例えば、2時間。)以内の将来において低処理負荷期間が開始するか否かを判定する。ステップS210において、診断部110dの機能により制御部11は、2時間以内に開始する将来の低処理負荷期間の長さを取得する。ステップS220において、診断部110dの機能により制御部11は、将来の低処理負荷期間内に診断が終了するナビゲーション機能があるか否かを判定する。各ナビゲーション機能を診断するための診断所要期間は予め記録媒体12に記録されており、診断部110dの機能により制御部11は、診断所要期間が将来の低処理負荷期間よりも短いナビゲーション機能が存在するか否かを判定する。将来の低処理負荷期間内に診断が終了するナビゲーション機能がある場合に、ステップS230において、診断部110dの機能により制御部11は、将来の低処理負荷期間内に診断が終了するナビゲーション機能を診断対象として選択する。そして、診断部110dの機能により制御部11は、診断対象として選択したナビゲーション機能の診断を将来の低処理負荷期間の開始とともに実行させるよう診断予約を行う。このように、将来の低処理負荷期間を予め推定しておき、低処理負荷期間に応じて診断予約を行ってもよい。むろん、将来の低処理負荷期間において、すべてのナビゲーション機能の診断をひととおり実行するように診断予約をしてもよいし、将来の低処理負荷期間内に診断が終了可能な複数のナビゲーション機能の組み合わせについての診断予約をしてもよい。さらに、診断部110dの機能により制御部11は、複数の将来の低処理負荷期間のそれぞれにおいて複数のナビゲーション機能のどれを診断させるかを配分してもよい。
【0061】
ところで、低処理負荷期間内にナビゲーション機能の診断を行う場合であっても、当該ナビゲーション機能の診断中に当該ナビゲーション機能をユーザが使用したいと考える場合もある。このような場合、ユーザは使用したいナビゲーション機能を実行させることができず、不都合となる。そこで、診断部11dの機能により制御部11は、低処理負荷期間とともに、ユーザによるナビゲーション装置10の使用可能性が所定の基準よりも低い低使用可能性期間も考慮してナビゲーション機能の診断を行うのが望ましい。例えば、(3−1−5)の変形例のように単位区間Rを走行する期間を低処理負荷期間と推定した場合において、当該低処理負荷期間内に診断が終了し、かつ、低使用可能性期間に診断が終了する場合に限り、診断を行うようにしてもよい。低使用可能性期間は、例えばユーザの生活圏を走行する場合において、ユーザがナビゲーション装置10に頼らずとも車両を走行させることができると推定される期間等とすることができる。また、診断部110dの機能により制御部11は、ナビゲーション機能の診断結果を示す診断情報12dを所定の通信回線を介してサーバ等に送信してもよい。これにより、診断情報12dを前記サーバにて解析することができる。
【符号の説明】
【0062】
10…ナビゲーション装置、11…制御部、12…記録媒体、12a…地図情報、12b…経路情報、12c…履歴情報、12d…診断情報、41…GPS受信部、42…車速センサ、43…ジャイロセンサ、44…操作入力部、45…表示装置、110…ナビゲーションプログラム、110a…ナビゲーション部、110b…履歴情報蓄積部、110c…期間推定部、110d…診断部。
【技術分野】
【0001】
本発明は、ナビゲーション装置を診断する技術に関する。
【背景技術】
【0002】
従来、車両停車中において車両の外部電源よりバッテリが充電されていることを条件として診断を許可する車両診断方法が提案されている(特許文献1、参照。)。
かかる構成によれば、バッテリが充電されている状態で診断を行うことができ、診断に大きな電力を要する場合でもバッテリの残電力量がなくなることが防止できる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−32431号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術では、車両停車中に車両の外部電源よりバッテリへの充電が可能な電気自動車等の車両に対する診断を前提としているため、このような外部電源からの充電設備を備えていない車両に対しては、車両停車中に診断を実行してしまうとバッテリの残電力量がなくなってしまうという問題があった。一方、車両走行中にナビゲーション装置の機能の診断を実行するようにした場合、車両走行中におけるエンジンの駆動によりバッテリの充電を行うことが可能となるが、車両走行中はナビゲーション装置が起動しているため、ナビゲーション装置のプロセッサの処理負荷が過大となり、不具合が生じ得る。
本発明は、前記課題にかんがみてなされたもので、プロセッサの処理負荷を過大とすることなく診断を行う技術の提供を目的とする。
【課題を解決するための手段】
【0005】
前記目的を達成するため、本発明のナビゲーション装置は期間推定手段を備える。この期間推定手段は、車両走行中におけるプロセッサの最大処理負荷が所定の基準よりも低くなる低処理負荷期間を推定する。すなわち、期間に属する各時刻におけるプロセッサの処理負荷のうち最も高い処理負荷である最大処理負荷が所定の基準よりも低くなる期間を、低処理負荷期間として推定する。そして、診断手段は、低処理負荷期間に応じてナビゲーション機能の診断を行う。これにより、プロセッサの最大処理負荷が所定の基準よりも低くなる期間においてナビゲーション機能の診断を実行することができる。すなわち、プロセッサの最大処理負荷が高くなり得る期間において診断を実行することが防止でき、ナビゲーション機能の診断中においてプロセッサの処理負荷が一時的に過大となることによる不具合が防止できる。車両走行中において診断を行うことができるため、車両走行中に診断する必要があるナビゲーション機能も診断できる。
【0006】
期間推定手段は、種々の情報に基づいて低処理負荷期間を推定することができる。例えば、期間推定手段は、ナビゲーション装置、ナビゲーション装置の周辺機器、ナビゲーション装置が備えられた車両、車両の周囲環境等に関する状況を示す情報に基づいて低処理負荷期間を推定することができる。ナビゲーション装置に関する状況を示す情報に基づいて低処理負荷期間を推定すれば、直接的にナビゲーション装置のプロセッサについての低処理負荷期間を推定することができる。一方、周辺機器や車両や周囲環境等に関する状況を示す情報に基づいて当該状況に依存したユーザのナビゲーション装置の動作が推定できるため、間接的に低処理負荷期間を推定できる。
【0007】
さらに、期間推定手段は、過去のナビゲーション装置等の状況を示す情報に基づいて低処理負荷期間を推定してもよいし、現在のナビゲーション装置等の状況を示す情報に基づいて低処理負荷期間を推定してもよい。過去のナビゲーション装置等の状況を示す情報によれば、プロセッサの最大処理負荷が低くなった過去の期間を特定することができ、当該期間に対応する期間を低処理負荷期間として推定することができる。ここで、過去においてプロセッサの最大処理負荷が低くなった期間に対応する期間とは、過去においてプロセッサの最大処理負荷が低くなった期間を示す年,月,日(曜日、平日、祝休日も含む。),時,分等のいずれかが一致または類似する期間を意味する。一方、現在のナビゲーション装置等の状況を示す情報によれば、プロセッサの最大処理負荷が低くなる将来の期間をナビゲーション装置等の現在の状況に基づいて推定することができる。従って、高い確度で低処理負荷期間を推定できる。
【0008】
診断手段は、低処理負荷期間に応じてナビゲーション機能を診断すればよく、現在が低処理負荷期間であることをもって即座に診断を開始させてもよいし、将来の低処理負荷期間において診断を行うように予め設定してもよい。
また、診断手段は、複数のナビゲーション機能のうちの少なくとも一つを診断すればよく、すべてのナビゲーション機能を一括して診断してもよいし、各ナビゲーション機能を個別に診断してもよい。例えば、将来の複数の低処理負荷期間のそれぞれにおいて診断させるナビゲーション機能を配分してもよい。なお、ナビゲーション機能は車両走行中に実行される機能であればよく、経路案内を行う機能に限定されない。例えば、ナビゲーション機能は、現在位置や車速等の車両の走行状況を監視する機能や、地図を表示させる機能であってもよい。
診断手段は、ナビゲーション機能の診断結果を示す診断情報を、ナビゲーション装置が備える記録媒体に記録してもよい。これにより、メンテナンス時において診断情報を前記記録媒体から読み出して解析することができる。また、診断手段は、診断情報を所定の通信回線を介してサーバ等に送信してもよい。これにより、診断情報を前記サーバにて解析することができる。
【0009】
また、期間推定手段は、車両が走行する区間を所定単位で区分した単位区間を走行する期間におけるプロセッサの最大処理負荷を推定し、当該推定したプロセッサの最大処理負荷が所定の基準よりも低くなる場合に、当該単位区間を走行する期間を低処理負荷期間として推定してもよい。ナビゲーション機能の多くの処理状況は、車両の走行状況等に応じて動的に変化する。従って、車両が走行する区間を所定単位で区分した単位区間ごとに、プロセッサの最大処理負荷を推定し、低処理負荷期間と推定することにより、車両の走行状況等に応じて動的に変化するプロセッサの最大処理負荷に応じた低処理負荷期間が設定できる。なお、単位区間は、車両が走行する区間を所定の単位距離で区分した区間であってもよいし、車両が走行する区間を所定の単位リンク数のリンクで区分した区間であってもよいし、車両が走行する区間を所定の単位期間で走行される距離で区分した区間であってもよい。
【0010】
さらに、期間推定手段は、単位区間の進入時と退出時とで共通の画像データに基づいて表示部にて表示ができる場合に、当該単位区間を車両が走行する期間を低処理負荷期間として推定してもよい。単位区間の進入時と退出時とで共通の画像データに基づいて表示部にて表示ができる場合、当該単位区間を走行する期間に新たな画像データを生成する必要がないからである。例えば、単位区間の退出時において分岐地点や交差点や渋滞区間等に所定距離以内まで接近する場合には、当該分岐地点等の案内を行うための新たな画像データを、単位区間を走行する期間に生成する必要がある。従って、期間推定手段は、単位区間の進入時と退出時とで車両が所定距離以内まで接近する分岐地点等に変化がない場合に、当該単位区間を車両が走行する期間を低処理負荷期間として推定してもよい。さらに、単位区間の進入時と退出時のそれぞれにおける車両の現在位置や車両の方向に応じた地図を画像データに基づいて表示する構成において、単位区間の進入時と退出時とで共通の画像データに基づいて表示部にて表示ができる場合には、当該単位区間を車両が走行する期間を低処理負荷期間として推定してもよい。
【0011】
多くの場合、ユーザの操作に応じてプロセッサが処理を実行することによりプロセッサの処理負荷が高くなるため、ナビゲーション装置がユーザから操作を受け付けない期間は、プロセッサの最大処理負荷が低い低処理負荷期間であるということができる。従って、ナビゲーション装置がユーザから操作を受け付けない可能性が所定の基準よりも大きい期間を低処理負荷期間として推定できる。ナビゲーション装置がユーザから操作を受け付けない可能性が所定の基準よりも大きい低処理負荷期間を、例えば過去においてナビゲーション装置がユーザから操作を受け付けなかった頻度や確率が所定の基準よりも大きい期間に対応する期間としてもよい。ユーザによるナビゲーション装置の使用には時間的規則性があるため、過去においてナビゲーション装置がユーザから操作を受け付けなかった頻度や確率が大きい期間に対応する期間においては、プロセッサの最大処理負荷は低くなると考えられるからである。
【0012】
さらに、ナビゲーション装置がユーザから操作を受け付けない可能性が所定の基準よりも大きい低処理負荷期間を、車両の走行状況に基づいて推定してもよい。車両の走行状況に応じてユーザがナビゲーション装置を操作しようとする意図が生じ得るため、車両の走行状況に基づいてナビゲーション装置がユーザから操作を受け付けない可能性が所定の基準よりも大きい低処理負荷期間が推定できる。例えば、ユーザがナビゲーション装置に案内を期待する分岐地点等に車両が所定距離以内まで接近する前と後では、接近した後の方が当該分岐地点等の案内を得ようとしてユーザがナビゲーション装置を操作する可能性が高い。従って、分岐地点等に車両が所定距離以内まで接近する前の期間を、低処理負荷期間として推定してもよい。
【0013】
また、ナビゲーション装置が案内を行わない期間では、案内を行うことにより生じるプロセッサの処理負荷が軽減される。従って、ナビゲーション装置が案内を行わない可能性が所定の基準よりも大きい期間を低処理負荷期間として推定できる。ナビゲーション装置が案内を行わない可能性が所定の基準よりも大きい低処理負荷期間を、過去においてナビゲーション装置が案内を行わなかった頻度や確率が所定の基準よりも大きい期間に対応する期間としてもよい。ナビゲーション装置による案内の実行には時間的規則性があるからである。
【0014】
さらに、ナビゲーション装置が案内を行わない可能性が所定の基準よりも大きい低処理負荷期間を、車両の走行状況に基づいて推定してもよい。ユーザがナビゲーション装置に何らかの案内を行わせようとする意図は、車両の走行状況に応じて生じ得るため、車両の走行状況に基づいてナビゲーション装置が案内を行わない可能性が所定の基準よりも大きい低処理負荷期間が推定できる。例えば、ユーザにとって馴染みのある地域や走行経路を車両が走行する期間では、ナビゲーション装置に案内を行わせずとも車両を走行させることができるため、当該期間を低処理負荷期間として推定できる。さらに、ユーザがナビゲーション装置に案内を期待する分岐地点や交差点や地物や渋滞区間に車両が所定距離以内まで接近する前と後では、接近した後の方が当該分岐地点等の案内をナビゲーション装置に行わせる可能性が高い。従って、分岐地点等に車両が所定距離以内まで接近する前の期間を、低処理負荷期間として推定してもよい。
【0015】
さらに、ユーザにとって馴染みのある地域や走行経路を車両の過去の走行履歴に基づいて特定してもよい。例えば、過去において車両が走行した頻度が所定の基準よりも大きい地域や走行経路を、ユーザにとって馴染みのある地域や走行経路として推定し、当該地域や走行経路を走行する期間を低処理負荷期間として推定してもよい。
【0016】
さらに、通勤経路や通学経路のように馴染みのある走行経路を車両が走行するタイミングは規則的である場合が多い。例えば、通勤経路や通学経路が走行されるのは、通常、通勤時間帯や通学時間帯となる。従って、過去において車両が同一の走行経路を走行した頻度が所定の基準よりも大きい期間に対応する期間を低処理負荷期間として推定してもよい。かかる構成においては、車両がどの道路を走行するかを特定しなくても済む。なお、同一の走行経路とは、実質的に同一の走行経路を含み、例えば出発地と終着地とが共通する場合や、走行経路を構成する道路(リンク)が所定の比率以上共通する場合や、一方の走行経路に他方の走行経路が含まれる場合等を含んでもよい。
【0017】
ところで、ナビゲーション機能の診断にはある程度の時間を要する場合があるため、ナビゲーション機能の診断が終了する前にプロセッサの最大処理負荷が高くなり得る期間へと移行する場合も考えられる。このような場合、プロセッサの過大な処理負荷による不具合が生じ得る。そのため、診断手段は、低処理負荷期間内にナビゲーション機能の診断が終了する場合に限り、ナビゲーション機能の診断を行うのが望ましい。
一方、ナビゲーション機能の診断に要する期間が短い場合等には、診断を開始する時刻が低処理負荷期間に属することのみをもって診断を実行するようにしてもよい。
また、複数のナビゲーション機能に応じて診断に要する期間が異なる場合には、低処理負荷期間内に診断を終了させることが可能なナビゲーション機能を選択して診断すればよい。これにより、短い低処理負荷期間も無駄にすることなくナビゲーション機能の診断を行うことができる。
【0018】
さらに、本発明のように低処理負荷期間を推定して診断を行う手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0019】
【図1】診断システムのブロック図である。
【図2】低処理負荷期間を示す模式図である。
【図3】診断制御処理を示すフローチャートである。
【図4】地図のヘディングアップ表示する様子の説明図である。
【図5】他の変形例にかかる診断制御処理のフローチャートである。
【発明を実施するための形態】
【0020】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)第1実施形態にかかるナビゲーション装置の構成:
(2)診断制御処理:
(3)他の実施形態:
【0021】
(1)第1実施形態にかかるナビゲーション装置の構成:
図1は、本発明の第1実施形態にかかるナビゲーション装置10の構成を示すブロック図である。ナビゲーション装置10は車両に備えられる。ナビゲーション装置10は、プロセッサとしてのCPUとRAMとROM等を備える制御部11と記録媒体12とを備えている。記録媒体12には、地図情報12aと経路情報12bと履歴情報12cと診断情報12dとが記録されている。ナビゲーション装置10は、記録媒体12やROMに記憶された各種プログラムの実行データを読み出して制御部11で実行する。本実施形態において、制御部11は、ナビゲーションプログラム110を実行する。
【0022】
地図情報12aには車両が走行する道路上に設定されたノードを示すノードデータ、ノード間の道路の形状を特定するための形状補間データ、ノード同士の連結を示すリンクデータ等が含まれている。ノードデータが示すノードには、交差点等に対応するノードが含まれている。経路情報12bは、車両が走行する走行予定経路がナビゲーションプログラム110の機能によって設定された場合に記録される情報であり、当該走行予定経路上に設定されたノード等を特定する。履歴情報12cは、ナビゲーション装置10の電源がオンとなっている期間において、ナビゲーション装置10が経路案内を行っていなかった期間を特定する情報である。
【0023】
車両は、GPS受信部41と車速センサ42とジャイロセンサ43と操作入力部44と表示部としての表示装置45とを備えている。GPS受信部41は、GPS衛星から電波を受信し、図示しないインタフェースを介して車両の現在位置を算出するための信号を出力する。車速センサ42は、車両が備える車輪の回転速度に対応した信号を出力する。ジャイロセンサ43は、車両に作用する角速度に対応した信号を出力する。制御部11は図示しないインタフェースを介してこの信号を取得し、車両の方向を取得する。制御部11は、GPS受信部41の出力信号から特定される車両の現在位置を、車速センサ42とジャイロセンサ43等からの信号に基づいて補正する。
【0024】
操作入力部44は、ユーザがナビゲーション装置10に対する操作を行うためのインタフェース部であり、図示しない操作パネルやタッチセンサやリモコン等を備えている。表示装置45は、制御部11が表示制御を行うことによってユーザに表示画像を介して各種の情報を提供するインタフェース部である。表示装置45は、図示しない液晶パネル等を備えている。
【0025】
ナビゲーションプログラム110は、ナビゲーション部110aと履歴情報蓄積部110bと期間推定部110cと診断部110dとを含む。ナビゲーション部110aと履歴情報蓄積部110bと期間推定部110cと診断部110dとは、図示しないOS上で実行され、当該OSによって各プログラムモジュール110a〜110dが使用する制御部11のCPUやRAM等のハードウェアリソースが割り当てられる。また、OSは、各プログラムモジュール110a〜110dを時分割して制御部11に実行させることにより、各プログラムモジュール110a〜110dを見かけ上、並列して実行させる。
【0026】
ナビゲーション部110aは、複数のナビゲーション機能(例えば、地図更新機能,経路案内機能,現在位置特定機能,操作受付機能,表示制御機能,オーディオ機能等)のうち少なくとも一つを制御部11に実行させる。このうち、現在位置特定機能と地図更新機能と経路案内機能とは走行中にて刻々と変化する車両の現在位置に応じた処理を実行する。現在位置特定機能により制御部11は、車速センサ42やジャイロセンサ43の出力信号に基づいて走行中の車両の走行軌跡を作成し、地図情報12aを参照して、当該走行軌跡と形状がマッチングする道路を特定する。そして、現在位置特定機能により制御部11は、走行軌跡と形状がマッチングする道路の位置に基づいて、GPS受信部41の出力信号に基づく車両の現在位置を補正する。地図更新機能により制御部11は、表示装置45に表示させる地図を車両の現在位置や車両の方向の変化に追従するように更新する機能であり、車両の現在位置や車両の方向に応じて地図を表示するための画像データを生成する。一方、経路案内機能により制御部11は、目的地等に基づいて走行予定経路を探索し、当該走行予定経路を特定する経路情報12bを記録媒体12に記録する。さらに、経路案内機能により制御部11は、走行予定経路を走行させるための経路案内を車両の現在位置等に応じて行う。また、経路案内機能により制御部11は、車両が走行予定経路の目的地に到達した場合や、走行予定経路の案内がユーザの操作によって中止された場合には、経路情報12bを記録媒体12から消去する。
【0027】
履歴情報蓄積部110bは、ナビゲーション装置10が走行予定経路の経路案内を行っていない期間である非経路案内期間を履歴情報12cに記録する機能を制御部11に実行させるプログラムモジュールである。すなわち、履歴情報蓄積部110bの機能により制御部11は、ナビゲーション装置10の電源がオンとなっている期間において記録媒体12における経路情報12bの記録有無を監視し、経路情報12bが記録されていない期間を非経路案内期間とし、当該非経路案内期間の開始時刻および終了時刻を履歴情報12cに記録する。すなわち、非経路案内期間の開始時刻および終了時刻を表す年,月,日(曜日),時,分等が履歴情報12cにおいて特定される。なお、現在時刻から所定期間以上過去の非経路案内期間については履歴情報12cから順次消去してもよい。
【0028】
期間推定部110cは、CPUの最大処理負荷が所定の基準よりも低くなる低処理負荷期間を推定する機能を制御部11に実行させるプログラムモジュールである。すなわち、期間推定部110cの機能により制御部11は、過去においてナビゲーション装置10が経路案内機能による経路案内を行っていなかった頻度が所定の基準よりも大きい期間に対応する期間を低処理負荷期間として推定する。なお、ナビゲーション装置10が経路案内機能による経路案内を行う期間においては、多くの処理が実行されるため、走行状況等に応じてCPUの処理負荷がナビゲーション機能の診断に支障を来す程度に高くなる場合が一時的に生じ得る。
【0029】
図2は、低処理負荷期間を模式的に説明する図である。期間推定部110cの機能により制御部11は、履歴情報12cにて特定された各非経路案内期間の年,月,日(曜日)に基づいて、各非経路案内期間を平日と祝休日とに振り分ける。図2においては、平日に振り分けられた非経路案内期間を実線矢印で示し、祝休日に振り分けられた非経路案内期間を破線矢印で示している。図2の横軸は、0時00分から23時59分までの時刻を示している。期間推定部110cの機能により制御部11は、4個以上の非経路案内期間が重複している時間帯を平日と祝休日のそれぞれについて抽出し、当該時間帯を平日または祝休日についての低処理負荷期間(図2にて黒く塗りつぶした時間帯)として推定する。すなわち、本実施形態では、過去において基準の4回以上の頻度で、ナビゲーション装置10の電源がオンにも拘わらずナビゲーション装置10が経路案内を行っていない期間を低処理負荷期間として推定する。本実施形態において、過去において所定の基準よりも大きい頻度でナビゲーション装置10が経路案内を行っていなかった期間と、低処理負荷期間とは、これらの期間を表す時,分が互いに一致する。
【0030】
図2の例では、平日についてのみ低処理負荷期間が推定されている。また、図2に示す低処理負荷期間は、平日において自宅から勤務地へと走行する出勤時間帯(7時5分から8時10分までの1時間5分)と、平日において勤務地から自宅へと走行する帰宅時間帯(17時45分から18時35分までの50分)とに対応している。通勤経路は、ユーザにとって馴染みがあるため、ナビゲーション装置10に経路案内を行わせずともユーザは車両を走行させることができる経路であるということができる。このように、ナビゲーション装置10の電源がオンにも拘わらずナビゲーション装置10が経路案内を行っていない期間は、時間的規則性を有している場合が多いため、過去において大きい頻度でナビゲーション装置10が経路案内を行っていない期間に対応する期間を低処理負荷期間と推定できる。一方、図2の例では、休祝日におけるユーザの行動に時間的規則性が乏しく、休祝日については低処理負荷期間が推定されていない。むろん、休祝日においても定期的な外出等がある場合には、休祝日についても低処理負荷期間期間が推定され得る。また、本実施形態では、4回以上の頻度を基準として低処理負荷期間期間を推定することとしたが、所定の確率を基準として低処理負荷期間期間を推定してもよい。例えば、図2の低処理負荷期間期間は、8月2日〜8月6日の5日間の平日において基準の4回以上の頻度でナビゲーション装置10が経路案内を行っていなかった期間であるとともに、5日間の平日におい80%以上の確率でナビゲーション装置10が経路案内を行っていなかった期間でもある。
【0031】
診断部110dは、低処理負荷期間内にナビゲーション機能の診断が終了するか否かを判断し、低処理負荷期間内にナビゲーション機能の診断が終了する場合に、ナビゲーション機能の診断を行う機能を制御部11に実行させるプログラムモジュールである。すなわち、診断部110dの機能により制御部11は、現在時刻が平日にあたるか祝休日にあたるかを判定し、平日にあたる場合には平日についての低処理負荷期間の時間帯に現在時刻(時,分)が属するか否かを判定する。同様に、現在時刻が祝休日にあたる場合には祝休日についての低処理負荷期間の時間帯に現在時刻(時,分)が属するか否かを判定する。低処理負荷期間に現在時刻が属する場合には、現在時刻が属する低処理負荷期間の終了までに上述の選択したナビゲーション機能の診断が終了するか否かを判定する。すなわち、低処理負荷期間内にナビゲーション機能の診断が終了するか否かを判定する。本実施形態では、CPUが経路案内機能を実行しない(経路案内を行わない)状況でCPUの処理負荷が一時的に高くなっても、ナビゲーション機能(地図更新機能,経路案内機能,現在位置特定機能…)のいずれの診断も実行可能なCPUの空き処理負荷を確保することができることとする。診断部110dの機能により制御部11は、複数のナビゲーション機能のうち最も過去に診断を行ったナビゲーション機能を選択し、当該選択した機能の診断が低処理負荷期間の終了までに終了するか否かを判定する。
【0032】
低処理負荷期間の終了までに選択したナビゲーション機能の診断が終了する場合には、診断部110dの機能により制御部11は、選択したナビゲーション機能の診断を実行する。選択したナビゲーション機能が実行されている場合には、選択したナビゲーション機能を一旦停止させた上で、所定の診断条件の下で選択したナビゲーション機能をテスト動作させて診断を行う。診断部110dの機能により制御部11は、テスト動作中において制御部11におけるCPUのレジスタやキャッシュやRAMに記憶されたデータを取得し、当該データを診断情報12dとして記録媒体12に記憶させる。
【0033】
以上説明したように、本実施形態によれば、CPUの最大処理負荷が高くなるタイミングで診断を実行することが防止でき、CPUの過大な処理負荷による不具合が防止できる。また、診断手段は、低処理負荷期間内にナビゲーション機能の診断が終了する場合にナビゲーション機能の診断を行うため、ナビゲーション機能の診断が終了する前にCPUの最大処理負荷が高くなる事態が防止できる。車両走行中における低処理負荷期間にてナビゲーション機能の診断を行うため、車両走行中にて刻々と変化する現在位置や車速等を利用するナビゲーション機能(現在位置特定機能,地図更新機能,経路案内機能)も診断できる。
【0034】
ここで、ユーザがナビゲーション装置10に経路案内を行わせる時間帯には規則性があるため、過去においてナビゲーション装置10が経路案内を行わなかった頻度が大きかった期間に対応する期間においては、プロセッサの最大処理負荷は低くなると考えられる。従って、過去においてナビゲーション装置10が経路案内を行わなかった頻度が所定の基準(例えば、4回。)よりも大きい期間に対応する期間を低処理負荷期間として推定し、当該低処理負荷期間に応じて診断を行うようにすることにより、CPUの過大な処理負荷による不具合が防止できる。
【0035】
(2)診断制御処理:
図3は、診断制御処理を示すフローチャートである。なお、診断制御処理は、ナビゲーション機能の診断中の期間を除き、所定の時間周期ごとに実行される処理である。むろん、診断制御処理は、ナビゲーション装置10の電源がオンとなっている期間において実行される。ステップS100において、診断部110dの機能により制御部11は、現在時刻が低処理負荷期間に属するか否かを判定する。すなわち、現在時刻が平日であるか祝休日のいずれにあたるかを判定し、平日または祝休日に対応する低処理負荷期間の時間帯に現在時刻(時,分)が属するか否かを判定する。なお、ステップS100において現在時刻が低処理負荷期間に属するか否かを判定するにあたり、期間推定部110cの機能により制御部11は、最新の履歴情報12cに基づいて低処理負荷期間を推定しておく。
【0036】
現在時刻が低処理負荷期間に属さない場合、制御部11は、診断制御処理を終了させ、次に診断制御処理を実行するまで待機する。一方、現在時刻が低処理負荷期間に属する場合、ステップS110において、診断部110dの機能により制御部11は、現在時刻が属する低処理負荷期間の終了時刻を取得する。ステップS120において、診断部110dの機能により制御部11は、最も過去に診断したナビゲーション機能を選択し、現在時刻が属する低処理負荷期間の終了時刻までに選択したナビゲーション機能の診断が終了するか否かを判定する。各ナビゲーション機能を診断するための診断所要期間は実験等により予め特定されており、診断部110dの機能により制御部11は、ナビゲーション機能を診断するための診断所要期間が取得可能である。なお、低処理負荷期間の終了時刻までに、選択したナビゲーション機能の診断が終了するか否かは、低処理負荷期間の終了時刻と、現在時刻に診断所要期間を加えた診断終了予定時刻との比較によって判定することができる。少なくとも低処理負荷期間の終了時刻までに診断が終了することが判定できればよく、低処理負荷期間の終了時刻の所定時間前に、選択したナビゲーション機能の診断が終了するか否かを判定してもよい。これにより、十分な時間的余裕をもって診断が終了できるか否かが判定できる。
【0037】
現在時刻が属する低処理負荷期間の終了時刻までに、選択したナビゲーション機能の診断が終了しないと判定した場合、制御部11は診断制御処理を終了させ、次に診断制御処理を実行するまで待機する。一方、現在時刻が属する低処理負荷期間の終了時刻までに、選択したナビゲーション機能の診断が終了すると判定した場合、ステップS130において、診断部110dの機能により制御部11は、選択したナビゲーション機能の診断を順次実行する。すなわち、選択したナビゲーション機能を順次テスト動作させ、そのときCPUのレジスタやキャッシュやRAMに記録されたデータを診断情報12dとして記録媒体12に記憶させる。なお、診断実行時において、診断中のナビゲーション機構に関する操作の受付を制限するとともに、表示装置45にて診断中である旨を表示させるのが望ましい。
【0038】
(3)他の実施形態:
(3−1)期間推定手法の変形例:
本発明の期間推定手段は種々の情報に基づいて低処理負荷期間を推定することができる。例えば、期間推定部110cの機能により制御部11は、ナビゲーション装置、ナビゲーション装置の周辺機器、ナビゲーション装置が備えられた車両、周囲環境等に関する過去または現在の状況を示す情報に基づいて低処理負荷期間を推定することができる。ナビゲーション装置に関する状況を示す情報に基づいてナビゲーション装置の使用状況が推定できるため、直接的にナビゲーション装置についての低処理負荷期間を推定することができる。一方、周辺機器や車両や周囲環境等に関する状況を示す情報に基づいて、当該状況に依存したユーザの行動が推定できるため、間接的にナビゲーション装置についての低処理負荷期間を推定することができる。
【0039】
さらに、期間推定部110cの機能により制御部11は、前記実施形態の履歴情報12bのように過去のナビゲーション装置等の状況を示す情報に基づいて低処理負荷期間を推定してもよいし、現在のナビゲーション装置等の状況を示す情報に基づいて低処理負荷期間を推定してもよい。過去のナビゲーション装置等の状況を示す情報によれば、CPUの最大処理負荷が低くなった過去の期間を特定することができ、当該期間に対応する期間を低処理負荷期間として推定することができる。現在のナビゲーション装置等の状況を示す情報によれば、CPUの最大処理負荷が低くなる将来の期間をナビゲーション装置等の現在の状況に基づいて推定することができる。従って、高い確度で低処理負荷期間を推定できる。
以下、期間推定手法の変形例を具体的な実施形態を挙げて説明する。
【0040】
(3−1−1)ナビゲーション装置に対する操作履歴に基づく推定:
本変形例において、履歴情報蓄積部110bの機能により制御部11は、ナビゲーション装置10の電源がオンとなっている期間においてナビゲーション装置10が操作を受け付けなかった期間(以下、非操作受付期間と表記する。)の開始時刻および終了時刻を履歴情報12cに記録する。非操作受付期間とは、例えばナビゲーション装置10の操作入力部44にて何らかの操作が受け付けられた時刻の前後所定期間を除く期間とされる。例えば、前記所定期間を5分とし、10時00分に操作が受け付けられた場合には、9時55分〜10時05分を除く期間が非操作受付期間となる。さらに、引き続いて10時03分に操作が受け付けられた場合には、9時55分〜10時08分を除く期間が非操作受付期間とされる。
【0041】
以上のようにして履歴情報12cが記録された状態において、期間推定部110cの機能により制御部11は、前記実施形態と同様の手法により低処理負荷期間を推定する。すなわち、過去において所定の基準(例えば、3回。)よりも大きい頻度で、ナビゲーション装置10の電源がオンにもかかわらずナビゲーション装置10が操作を受け付けていない期間を低処理負荷期間として推定する。低処理負荷期間が推定できると、診断部110dの機能により制御部11は、前記実施形態と同様の判定を行ってナビゲーション機能の診断を実行する。
【0042】
多くの場合、ユーザの操作に応じてプロセッサが処理を実行することにより、CPUの処理負荷が高くなるため、ナビゲーション装置10がユーザから操作を受け付けない期間は、ナビゲーション装置10のCPUの最大処理負荷が低くなる低処理負荷期間であるということができる。さらに、ユーザによるナビゲーション装置10の使用時間帯には規則性があるため、過去においてナビゲーション装置10がユーザから操作を受け付けなかった頻度が大きい期間に対応する期間においては、CPUの最大処理負荷は低くなると考えられる。従って、過去においてナビゲーション装置10がユーザから操作を受け付けなかった頻度が所定の基準よりも大きかった期間に対応する期間を低処理負荷期間として推定し、当該低処理負荷期間に応じて診断を行うようにすれば、CPUの過大な処理負荷による不具合が防止できる。
【0043】
(3−1−2)表示装置に対する操作履歴に基づく推定:
本変形例において、履歴情報蓄積部110bの機能により制御部11は、ナビゲーション装置10の電源がオンとなっている期間において表示装置45の電源がオフとなっていた期間である表示オフ期間の開始時刻および終了時刻を履歴情報12cに記録する。例えば、履歴情報蓄積部110bの機能により制御部11は、図示しない信号線を介して表示装置45の電源状態を監視し、表示装置45の電源状態がオンからオフに転じた時刻を表示オフ期間の開始時刻とし、表示装置45の電源状態がオフからオンに転じた時刻を表示オフ期間の終了時刻とする。
【0044】
以上のようにして履歴情報12cが記録された状態において、期間推定部110cの機能により制御部11は、前記実施形態と同様の手法により低処理負荷期間を推定する。低処理負荷期間が推定できると、診断部110dの機能により制御部11は、前記実施形態のステップS110〜S120と同様の判定を行ってナビゲーション機能の診断を実行する。表示オフ期間は、ナビゲーション装置10の電源がオンとなっているにも拘わらず表示装置45がオフされた期間であり、ナビゲーション装置10における表示制御機能が実行されないとともに、ユーザの操作により他のナビゲーション機能が実行されている可能性が低く、CPUの最大処理負荷が低くなる期間であると推定できる。従って、低処理負荷期間を高い確度で推定できる。
【0045】
(3−1−3)車両の現在の走行状況に基づく推定:
以上においては、ナビゲーション装置10または表示装置45の過去の状況を示す履歴情報12cに基づいて低処理負荷期間を推定する例を示したが、車両の現在の状況を示す情報に基づいて低処理負荷期間を推定してもよい。本変形例においては、期間推定部110cの機能により制御部11は、GPS受信部41からの出力信号等に基づいて車両の現在位置を取得する。そして、期間推定部110cの機能により制御部11は、現在位置と地図情報12aとに基づいて車両が現在走行する道路、および、当該道路における車両の走行方向を取得する。期間推定部110cの機能により制御部11は、現在走行している道路を車両が道なりに走行した場合に、最初に到達する分岐地点(交差点)に所定距離(例えば、50m等。)以内まで接近すると推定される接近予定時刻が現在時刻から所定期間(例えば、3分。)以上経過後であれば、現在時刻から接近予定時刻までの期間を低処理負荷期間とする。すなわち、車両が現在から所定期間以上にわたって次の分岐地点に接近しない場合には、現在時刻から接近予定時刻までの期間を低処理負荷期間とする。なお、接近予定時刻は、現在位置と分岐地点との距離と車速センサ42の出力信号に基づく車速等に基づいて得ることができる。低処理負荷期間が推定できると、診断部110dの機能により制御部11は、前記実施形態のステップS110〜S120と同様の判定を行ってナビゲーション機能の診断を実行する。
【0046】
以上説明した低処理負荷期間は、道路上に分岐地点が広い間隔でしか存在しない高速道路や有料道路等を走行する場合において特に推定され得る。車両が分岐地点の所定距離以内に接近するタイミング、すなわちユーザが分岐地点やその標識を視認するタイミングにおいて、ユーザは分岐地点についての行き先等の情報を得ようとしてナビゲーション装置10を操作することが予測される。例えば、車両が分岐地点に接近するタイミングにおいて、ナビゲーション装置10が経路案内を行っている場合には分岐地点にて推奨される退出方向の案内や分岐地点付近の3D画像の表示を行うための処理負荷が発生し、ナビゲーション装置10が経路案内を行っていない場合にも分岐地点における行き先や車線等の情報の案内を行うための処理負荷が発生する。すなわち、本変形例においては、分岐地点に接近してナビゲーション装置10のCPUの最大処理負荷が高くなる前に、ナビゲーション機能の診断を実行しておくことができる。なお、時間的余裕をもってナビゲーション機能の診断が終了するように、接近予定時刻から所定期間前の時刻を低処理負荷期間の終了時刻としてもよい。
【0047】
ナビゲーション装置10にユーザの自宅や勤務地等が登録されている場合、これらの地点から所定距離以内の範囲の地域は生活圏であると推定できる。例えば、生活圏は自宅や勤務地等から所定半径以内の地域と定義しておく。そして、車両が生活圏の内側に存在する場合において車両が生活圏の外側に出ることができる最も早い時刻を推定し、当該時刻を低処理負荷期間の終了時刻としてもよい。例えば、車両が生活圏の外側に出ることができる最も早い時刻は、生活圏の外縁から現在位置までの最短距離を法定制限速度で除算した時間を現在時刻に加算することにより得ることができる。ユーザの生活圏ではナビゲーション装置10のナビゲーション機能を多く実行させずともユーザは車両を走行させることができると考えられるため、車両が生活圏の外側に出ることができる最も早い時刻よりも前の期間を低処理負荷期間として推定することができる。
【0048】
(3−1−4)車両の現在および過去の走行状況に基づく推定:
さらに、ユーザに馴染みのある地域や走行経路を過去の車両の走行履歴に基づいて推定してもよい。本変形例において、履歴情報蓄積部110bの機能により制御部11は、走行経路と走行時刻とを対応付けて履歴情報12cに記録する。以上のように履歴情報12cが記録された状態において、期間推定部110cの機能により制御部11は、所定の基準(例えば、5回。)よりも大きい頻度で走行された走行経路を抽出する。そして、期間推定部110cの機能により制御部11は、抽出した走行経路上を車両が走行中であるか否かを判定し、抽出した走行経路上を車両が走行中である場合には、現在、低処理負荷期間であると判定する。そして、期間推定部110cの機能により制御部11は、抽出した走行経路の終点に車両が到達する時刻を現在位置や車両の走行方向や車速等に基づいて予測し、当該時刻を低処理負荷期間の終了時刻とする。このようにすることにより、過去に何度か走行している走行経路においてユーザがナビゲーション装置10のナビゲーション機能を多く実行させずとも車両を走行させることができる期間において、ナビゲーション機能を診断することができる。
【0049】
ところで、通勤経路や通学経路のように走行する時間帯がほぼ一定となる走行経路については、車両が走行する道路を特定するまでもなく、通勤経路や通学経路を車両が走行していると推定できる。すなわち、期間推定部110cの機能により制御部11は、同一の走行経路が、同一時間帯において所定の基準(例えば、5回。)よりも大きい頻度で走行された時間帯を履歴情報12cから抽出する。なお、同一時間帯とは、平日であるか祝休日であるかが一致し、走行開始時刻(時,分)と走行終了時刻(時,分)とが所定の誤差範囲以内となることを指す。なお、同一の走行経路とは、実質的に同一の走行経路を含み、例えば出発地と終着地とが共通する場合や、走行経路を構成する道路(リンク)が所定の比率以上共通する場合や、一方の走行経路に他方の走行経路が含まれる場合等を含む。
【0050】
期間推定部110cの機能により制御部11は、抽出した時間帯を低処理負荷期間として推定する。そして、診断部110dの機能により制御部11は、現在時刻が低処理負荷期間に属し、かつ、当該低処理負荷期間の終了時刻までに選択したナビゲーション機能の診断が終了する場合には、選択したナビゲーション機能の診断を実行する。このようにすることにより、診断部110dの機能により制御部11は、車両が現在走行する道路を特定することなく、診断を実行するか否かを判定できる。むろん、本変形例において、診断部110dの機能により制御部11は、現在時刻が低処理負荷期間に属し、かつ、車両の現在位置が走行頻度の高い走行経路上にあることをもって、診断を実行するとしてもよい。
【0051】
(3−1−5)画像データの生成負荷に基づく推定:
ナビゲーション装置10が地図更新機能および表示制御機能により表示装置45に車両の現在位置付近の所定範囲の地図を表示させる場合、車両の現在位置の変化に追従するように、逐次、表示装置45に地図を表示させるための画像データを生成するためのCPUの処理負荷が発生する。車両の現在位置の変化態様は車両が走行する区間に依存するため、地図を表示させるための画像データを生成するCPUの処理負荷も車両が走行する区間に依存することとなる。特に、車両の現在位置の変化および車両の方向に追従するように地図を表示させるヘッディングアップ表示を行う場合には、画像データを生成するための処理負荷が区間の形状に大きく依存する。
【0052】
図4は、ヘッディングアップ表示を行う様子を模式的に示す図である。図4においては、車両Cが走行中の道路を現在位置から所定の単位距離(例えば、300m。)だけ道なり前方に走行した場合に走行される区間を単位区間Rとして示している。地図更新機能の機能により制御部11は、単位区間Rへの進入時において所定の地図生成領域A1についての地図を示す画像データを制御部11のRAMに記録している。そして、地図更新機能により制御部11は、単位区間Rへの進入時において地図生成領域A1のうち現在位置(単位区間Rの始点)を重心とし、車両の前方を領域上方(矢印で図示。)とした所定の地図表示領域A2について画像データを切り出す。そして、表示制御機能により制御部11は、地図表示領域A2について切り出した画像データを、領域上方が表示装置45の表示面の上側に表示されるように表示装置45にて表示させる。地図生成領域A1と地図表示領域A2とは矩形であり、地図表示領域A2よりも地図生成領域A1が大きい。地図表示領域A2よりも地図生成領域A1を大きくすることにより、車両Cの現在位置や車両Cの方向の変化に応じて地図表示領域A2の位置や角度が変化した場合でも、地図表示領域A2全体が地図生成領域A1に属する限りにおいては、地図生成領域A1に対応する画像データから地図表示領域A2に対応する部分を切り出して表示させることができる。すなわち、地図表示領域A2全体が地図生成領域A1に属する限りにおいては、地図を表示させるために地図情報12aに基づいて新たに画像データを生成する必要はない。一方、地図表示領域A2全体が地図生成領域A1に属さない場合においては、単位区間Rを走行する期間において新たに画像データを生成するタイミングが生じ、このタイミングにおいて一時的にCPUの処理負荷が高くなる。
【0053】
以上説明したヘッディングアップ表示を行う場合において、期間推定部110cの機能により制御部11は、単位区間Rの退出時における地図表示領域A2を地図情報12aに基づいて推定し、当該地図表示領域A2全体が地図生成領域A1に属するか否かを判定する。単位区間Rの退出時における地図表示領域A2は、単位区間Rが属する道路の形状補間データによって特定される単位区間Rの終点の位置と当該終点における道路の方向とに基づいて特定できる。単位区間Rの終点の位置は、地図表示領域A2の重心に対応し、単位区間Rの終点における道路の方向は地図表示領域A2の領域上方に対応する。期間推定部110cの機能により制御部11は、単位区間Rの退出時における地図表示領域A2全体が地図生成領域A1に属する場合には、当該単位区間Rを走行する期間を低処理負荷期間と推定する。退出時における地図表示領域A2全体が地図生成領域A1に属する場合、単位区間Rの進入時と退出時とで共通の画像データに基づいて表示装置45にて地図が表示でき、単位区間Rの退出時までに画像データを新たに生成する必要はない。従って、単位区間Rを走行する期間におけるCPUの処理負荷は低くなると推定できる。以上のようにして、低処理負荷期間が推定できると、診断部110dの機能により制御部11は、車両Cが単位区間Rの終点に到達する時刻を予測し、当該到達時刻までに診断が終了するナビゲーション機能の診断を実行する。
【0054】
ヘッディングアップ表示を行う場合、地図表示領域A2は車両Cの前方の方向に追従して回転するため、単位区間Rの退出時において地図表示領域A2全体が地図生成領域A1に属さなくなる場合が生じ得る。単位区間Rの進入時と退出時とでは車両Cの現在位置は単位距離しか変わらず、現在位置の変化、すなわち重心の位置の変化のみにより地図表示領域A2全体が地図生成領域A1に属さなくなる可能性は低い。しかし、ヘッディングアップ表示を行う場合、車両Cの前方の方向に応じて地図表示領域A2が回転するため、地図表示領域A2の一部が地図生成領域A1の外側となる場合が生じる。従って、進入角度と退出角度が所定の基準(例えば、30度。)よりも小さい単位区間Rを走行する期間を低処理負荷期間と推定するようにしてもよい。また、複数の単位区間Rによって構成される区間であって、進入角度と退出角度が所定の基準よりも小さい単位区間Rの構成比率が所定の基準よりも大きい区間を走行する期間を低処理負荷期間と推定するようにしてもよい。
【0055】
また、単位区間Rを走行する期間において、表示装置45にて表示させるための画像データを新たに生成する必要性が単位区間Rに依存して変動する場合は他にも考えられる。例えば、車両の現在位置から所定距離以内に分岐地点や交差点や地物や渋滞区間等が存在する場合に当該分岐地点等の案内を表示させる構成において、単位区間Rの始点から所定距離以内に分岐地点等が存在しないが、単位区間Rの終点から所定距離以内に分岐地点等が存在する場合には、単位区間Rを走行する期間において当該分岐地点等についての案内を表示させるための画像データを新たに生成する必要がある。単位区間Rへの進入時には分岐地点等の案内を含まない画像データに基づいて表示を行ない、単位区間Rからの退出時には分岐地点等の案内を含む画像データに基づいて表示を行うからである。反対に、単位区間Rの始点と終点とで所定距離以内に存在する分岐地点や交差点や地物や渋滞区間等に変化がない場合には、画像データを新たに生成する必要性が少なく、当該単位区間Rを走行する期間を低処理負荷期間と推定するようにしてもよい。
【0056】
さらに、単位区間Rは単位期間に走行する区間であってもよい。すなわち、期間推定部110cの機能により制御部11は、単位期間におけるプロセッサの最大処理負荷を推定し、当該推定したプロセッサの最大処理負荷が所定の基準よりも低くなる場合に、当該単位区間を車両が走行する単位期間を低処理負荷期間として推定してもよい。図4に示すように、地図表示領域A2全体が地図生成領域A1に含まれなくなる段階で地図を示す新たな画像データを生成する必要がある。地図生成領域A1は車両Cの現在位置に追従するため、ヘッディングアップ表示を行うか否かに拘わらず、車両Cの車速が大きいほど単位期間において新たな画像データを生成するための処理負荷が大きくなる。従って、車両Cの車速が所定の基準速度(例えば、30km/時。)である場合に、単位期間を低処理負荷期間と推定するようにしてもよい。
【0057】
(3−1−6)各推定手法の組み合わせ:
以上においては、種々の推定手法によって低処理負荷期間が推定できることを説明したが、これらの推定手法のうち2以上の推定手法を組み合わせもよい。例えば、診断部110dの機能により制御部11は、上述した各推定手法によって個別に推定された低処理負荷期間のそれぞれに現在時刻が属するか否かを判定してもよい。なお、種々の推定手法によって推定された低処理負荷期間ごとに、当該低処理負荷期間にてCPUの処理負荷が最も高くなったタイミングでのCPUの空き処理負荷は異なることとなる。さらに、複数の低処理負荷期間に該当する場合には、該当する低処理負荷期間の組み合わせごとに、CPUの処理負荷が最も高くなったタイミングでのCPUの空き処理負荷は異なることとなる。例えば、経路案内を行っていないと推定される低処理負荷期間に該当する場合と、経路案内を行っていないと推定される低処理負荷期間(第1実施形態、参照。)、および、画像データを新たに生成する必要のない単位区間Rを走行する期間である低処理負荷期間((3−1−5)、参照。)に該当する場合とでは、後者の方がCPUの空き処理負荷が大きくなる。
【0058】
本変形例においては、該当する低処理負荷期間の組み合わせごとに、CPUの空き処理負荷を規定したマップを記録媒体12に記録しておき、当該マップを参照することにより、制御部11は該当する低処理負荷期間の組み合わせに対応するCPUの空き処理負荷を取得する。さらに、各ナビゲーション機能の診断を行うために必要なCPUの処理負荷を規定したマップを記録媒体12に記録しておき、当該マップを参照することにより、制御部11は各ナビゲーション機能の診断を行うために必要なCPUの処理負荷を取得する。そして、診断部110dの機能により制御部11は、該当する低処理負荷期間の組み合わせに対応するCPUの空き処理負荷よりも小さいCPUの処理負荷で診断可能なナビゲーション機能の診断を実行させる。なお、CPUの空き処理負荷に、各ナビゲーション機能の診断を行うための診断所要期間が依存する場合も考えられる。従って、CPUの空き処理負荷と各ナビゲーション機能の診断所要期間との対応関係を規定したマップを記録媒体12に記録しておいてもよい。そして、診断部11dの機能により制御部11は、前記マップを参照して、CPUの空き処理負荷に依存した診断所要期間を取得し、当該診断所要期間に基づいて低処理負荷期間内に診断が終了するナビゲーション機能を選択して、当該ナビゲーション機能の診断を行ってもよい。
【0059】
(3−2)他の変形例:
前記実施形態では最も過去に診断したナビゲーション機能を診断することとしたが、ナビゲーション機能に応じて診断に要する期間が異なる場合には、低処理負荷期間内に診断を終了させることが可能なナビゲーション機能を選択して診断するようにしてもよい。これにより、短い低処理負荷期間も無駄にすることなくナビゲーション機能の診断を行うことができる。
【0060】
図5は他の変形例にかかる診断制御処理のフローチャートである。図5のステップS200において、診断部110dの機能により制御部11は、現在時刻から所定時間(例えば、2時間。)以内の将来において低処理負荷期間が開始するか否かを判定する。ステップS210において、診断部110dの機能により制御部11は、2時間以内に開始する将来の低処理負荷期間の長さを取得する。ステップS220において、診断部110dの機能により制御部11は、将来の低処理負荷期間内に診断が終了するナビゲーション機能があるか否かを判定する。各ナビゲーション機能を診断するための診断所要期間は予め記録媒体12に記録されており、診断部110dの機能により制御部11は、診断所要期間が将来の低処理負荷期間よりも短いナビゲーション機能が存在するか否かを判定する。将来の低処理負荷期間内に診断が終了するナビゲーション機能がある場合に、ステップS230において、診断部110dの機能により制御部11は、将来の低処理負荷期間内に診断が終了するナビゲーション機能を診断対象として選択する。そして、診断部110dの機能により制御部11は、診断対象として選択したナビゲーション機能の診断を将来の低処理負荷期間の開始とともに実行させるよう診断予約を行う。このように、将来の低処理負荷期間を予め推定しておき、低処理負荷期間に応じて診断予約を行ってもよい。むろん、将来の低処理負荷期間において、すべてのナビゲーション機能の診断をひととおり実行するように診断予約をしてもよいし、将来の低処理負荷期間内に診断が終了可能な複数のナビゲーション機能の組み合わせについての診断予約をしてもよい。さらに、診断部110dの機能により制御部11は、複数の将来の低処理負荷期間のそれぞれにおいて複数のナビゲーション機能のどれを診断させるかを配分してもよい。
【0061】
ところで、低処理負荷期間内にナビゲーション機能の診断を行う場合であっても、当該ナビゲーション機能の診断中に当該ナビゲーション機能をユーザが使用したいと考える場合もある。このような場合、ユーザは使用したいナビゲーション機能を実行させることができず、不都合となる。そこで、診断部11dの機能により制御部11は、低処理負荷期間とともに、ユーザによるナビゲーション装置10の使用可能性が所定の基準よりも低い低使用可能性期間も考慮してナビゲーション機能の診断を行うのが望ましい。例えば、(3−1−5)の変形例のように単位区間Rを走行する期間を低処理負荷期間と推定した場合において、当該低処理負荷期間内に診断が終了し、かつ、低使用可能性期間に診断が終了する場合に限り、診断を行うようにしてもよい。低使用可能性期間は、例えばユーザの生活圏を走行する場合において、ユーザがナビゲーション装置10に頼らずとも車両を走行させることができると推定される期間等とすることができる。また、診断部110dの機能により制御部11は、ナビゲーション機能の診断結果を示す診断情報12dを所定の通信回線を介してサーバ等に送信してもよい。これにより、診断情報12dを前記サーバにて解析することができる。
【符号の説明】
【0062】
10…ナビゲーション装置、11…制御部、12…記録媒体、12a…地図情報、12b…経路情報、12c…履歴情報、12d…診断情報、41…GPS受信部、42…車速センサ、43…ジャイロセンサ、44…操作入力部、45…表示装置、110…ナビゲーションプログラム、110a…ナビゲーション部、110b…履歴情報蓄積部、110c…期間推定部、110d…診断部。
【特許請求の範囲】
【請求項1】
少なくとも一つのナビゲーション機能を実行するプロセッサと、
車両走行中における前記プロセッサの最大処理負荷が所定の基準よりも低くなる低処理負荷期間を推定する期間推定手段と、
前記低処理負荷期間に応じて前記ナビゲーション機能の診断を行う診断手段と、
を備えるナビゲーション装置。
【請求項2】
前記期間推定手段は、車両が走行する区間を所定単位で区分した単位区間を走行する期間における前記プロセッサの最大処理負荷を推定し、当該推定した前記プロセッサの最大処理負荷が所定の基準よりも低くなる場合に、当該単位区間を前記車両が走行する期間を前記低処理負荷期間として推定する、
請求項1に記載のナビゲーション装置。
【請求項3】
前記期間推定手段は、前記単位区間の進入時と退出時とで共通の画像データに基づく表示を表示部にて行うか否かを地図情報に基づいて判定し、前記単位区間の進入時と退出時とで共通の前記画像データに基づく表示を表示部にて行うと判定した場合に、当該単位区間を前記車両が走行する期間を前記低処理負荷期間として推定する、
請求項2に記載のナビゲーション装置。
【請求項4】
前記期間推定手段は、前記ナビゲーション装置がユーザから操作を受け付けない可能性が所定の基準よりも大きい期間を前記低処理負荷期間として推定する、
請求項1から請求項3のいずれか一項に記載のナビゲーション装置。
【請求項5】
前記期間推定手段は、前記ナビゲーション装置が案内を行わない可能性が所定の基準よりも大きい期間を前記低処理負荷期間として推定する、
請求項1から請求項4のいずれか一項に記載のナビゲーション装置。
【請求項6】
前記期間推定手段は、過去において車両が同一の走行経路を走行した頻度が所定の基準よりも大きい期間に対応する期間を前記低処理負荷期間として推定する、
請求項1から請求項5のいずれか一項に記載のナビゲーション装置。
【請求項7】
前記診断手段は、前記低処理負荷期間内に前記ナビゲーション機能の診断が終了するか否かを判断し、前記低処理負荷期間内に前記ナビゲーション機能の診断が終了する場合に、前記ナビゲーション機能の診断を行う、
請求項1から請求項6のいずれか一項に記載のナビゲーション装置。
【請求項8】
前記プロセッサは、複数の前記ナビゲーション機能を実行し、
前記診断手段は、複数の前記ナビゲーション機能のなかから前記低処理負荷期間内に診断が終了する前記ナビゲーション機能を選択して診断する、
請求項1から請求項7のいずれか一項に記載のナビゲーション装置。
【請求項9】
少なくとも一つのナビゲーション機能を実行するプロセッサを備えるナビゲーション装置の診断方法であって、
車両走行中における前記プロセッサの最大処理負荷が所定の基準よりも低くなる低処理負荷期間を推定する期間推定工程と、
前記低処理負荷期間に応じて前記ナビゲーション機能の診断を行う診断工程と、
を含むナビゲーション装置の診断方法。
【請求項10】
少なくとも一つのナビゲーション機能を実行するプロセッサを備えるナビゲーション装置にて実行される診断プログラムであって、
車両走行中における前記プロセッサの最大処理負荷が所定の基準よりも低くなる低処理負荷期間を推定する期間推定機能と、
前記低処理負荷期間に応じて前記ナビゲーション機能の診断を行う診断機能と、
を前記ナビゲーション装置に実行させる診断プログラム。
【請求項1】
少なくとも一つのナビゲーション機能を実行するプロセッサと、
車両走行中における前記プロセッサの最大処理負荷が所定の基準よりも低くなる低処理負荷期間を推定する期間推定手段と、
前記低処理負荷期間に応じて前記ナビゲーション機能の診断を行う診断手段と、
を備えるナビゲーション装置。
【請求項2】
前記期間推定手段は、車両が走行する区間を所定単位で区分した単位区間を走行する期間における前記プロセッサの最大処理負荷を推定し、当該推定した前記プロセッサの最大処理負荷が所定の基準よりも低くなる場合に、当該単位区間を前記車両が走行する期間を前記低処理負荷期間として推定する、
請求項1に記載のナビゲーション装置。
【請求項3】
前記期間推定手段は、前記単位区間の進入時と退出時とで共通の画像データに基づく表示を表示部にて行うか否かを地図情報に基づいて判定し、前記単位区間の進入時と退出時とで共通の前記画像データに基づく表示を表示部にて行うと判定した場合に、当該単位区間を前記車両が走行する期間を前記低処理負荷期間として推定する、
請求項2に記載のナビゲーション装置。
【請求項4】
前記期間推定手段は、前記ナビゲーション装置がユーザから操作を受け付けない可能性が所定の基準よりも大きい期間を前記低処理負荷期間として推定する、
請求項1から請求項3のいずれか一項に記載のナビゲーション装置。
【請求項5】
前記期間推定手段は、前記ナビゲーション装置が案内を行わない可能性が所定の基準よりも大きい期間を前記低処理負荷期間として推定する、
請求項1から請求項4のいずれか一項に記載のナビゲーション装置。
【請求項6】
前記期間推定手段は、過去において車両が同一の走行経路を走行した頻度が所定の基準よりも大きい期間に対応する期間を前記低処理負荷期間として推定する、
請求項1から請求項5のいずれか一項に記載のナビゲーション装置。
【請求項7】
前記診断手段は、前記低処理負荷期間内に前記ナビゲーション機能の診断が終了するか否かを判断し、前記低処理負荷期間内に前記ナビゲーション機能の診断が終了する場合に、前記ナビゲーション機能の診断を行う、
請求項1から請求項6のいずれか一項に記載のナビゲーション装置。
【請求項8】
前記プロセッサは、複数の前記ナビゲーション機能を実行し、
前記診断手段は、複数の前記ナビゲーション機能のなかから前記低処理負荷期間内に診断が終了する前記ナビゲーション機能を選択して診断する、
請求項1から請求項7のいずれか一項に記載のナビゲーション装置。
【請求項9】
少なくとも一つのナビゲーション機能を実行するプロセッサを備えるナビゲーション装置の診断方法であって、
車両走行中における前記プロセッサの最大処理負荷が所定の基準よりも低くなる低処理負荷期間を推定する期間推定工程と、
前記低処理負荷期間に応じて前記ナビゲーション機能の診断を行う診断工程と、
を含むナビゲーション装置の診断方法。
【請求項10】
少なくとも一つのナビゲーション機能を実行するプロセッサを備えるナビゲーション装置にて実行される診断プログラムであって、
車両走行中における前記プロセッサの最大処理負荷が所定の基準よりも低くなる低処理負荷期間を推定する期間推定機能と、
前記低処理負荷期間に応じて前記ナビゲーション機能の診断を行う診断機能と、
を前記ナビゲーション装置に実行させる診断プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−37360(P2012−37360A)
【公開日】平成24年2月23日(2012.2.23)
【国際特許分類】
【出願番号】特願2010−177243(P2010−177243)
【出願日】平成22年8月6日(2010.8.6)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成24年2月23日(2012.2.23)
【国際特許分類】
【出願日】平成22年8月6日(2010.8.6)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]