
ナビゲーション装置およびその自車位置表示方法
【課題】 自車位置マークの表示内容によって自車の進行状況を即座に把握することができ、ひいては、ゆとりを持った安全な運転を行わしめることができ、さらに、その後のドライブプランを立て易くすることができる「ナビゲーション装置およびその自車位置表示方法」を提供すること。
【解決手段】 目的地へのルート設定の際に算出された当初到着予定時刻に対する自車の進行状況に応じて、自車位置マークの表示内容を変更可能とされていること。
【解決手段】 目的地へのルート設定の際に算出された当初到着予定時刻に対する自車の進行状況に応じて、自車位置マークの表示内容を変更可能とされていること。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置およびその自車位置表示方法に係り、特に、地図上における自車位置を示す自車位置マークを表示部に表示するのに好適なナビゲーション装置およびその自車位置表示方法に関する。
【背景技術】
【0002】
従来から、ナビゲーション装置においては、自車を目的地に案内するルート案内を行う際に、表示部に道路やランドマーク等の地図情報とともに地図上における自車位置を示す自車位置マークを表示することが行われていた。通常、自車位置マークは、矢印の形状のアイコンである場合が多かった。
【0003】
また、従来から、ナビゲーション装置においては、表示部に目安として目的地への到着予定時刻を表示したり、全行程に対する進行状況を表示したりすることが可能とされていた。
【0004】
【特許文献1】特開2000−258173号公報
【特許文献2】特開2002−181553号公報
【特許文献3】特開2004−45237号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の自車位置マークの表示内容では、ルート設定時に算出された当初到着予定時刻に対する自車の進行状況、すなわち、当初の予定よりも遅れているのか、進んでいるのか、あるいは予定通りなのかを即座に判断することができないといった問題が生じていた。
【0006】
例えば、現状のナビゲーション装置において、表示部に表示される到着予定時刻は、自車の進行状況に応じて変動するものであるため、運転者等の操作者は、ルート設定の際に算出された当初到着予定時刻を覚えていなければ自車の進行状況を的確に把握することができなかった。
【0007】
そこで、本発明は、このような問題点に鑑みなされたものであり、自車位置マークの表示内容によって自車の進行状況を即座に把握することができ、ひいては、
ゆとりを持った安全な運転を行わしめることができ、さらに、その後のドライブプランを立て易くすることができるナビゲーション装置およびその自車位置表示方法を提供することを目的とするものである。
【課題を解決するための手段】
【0008】
前述した目的を達成するため、本発明に係るナビゲーション装置の特徴は、地図上における自車位置を示す自車位置マークを地図情報とともに表示部に表示可能とされ、目的地への到着予定時刻を算出可能とされたナビゲーション装置において、前記目的地へのルート設定の際に算出された当初到着予定時刻に対する自車の進行状況に応じて、前記自車位置マークの表示内容を変更可能とされている点にある。
【0009】
そして、このような構成によれば、当初到着予定時刻に対する自車の進行状況に応じて自車位置マークの表示内容をリアルタイムに変更することが可能となる。
【0010】
また、本発明に係るナビゲーション装置の特徴は、当初到着予定時刻に対して予定通りの進行状況であるとみなす時間範囲を設定可能とされ、自車の進行状況が当該時間範囲を逸脱した場合に自車位置マークの表示内容を変更可能とされている点にある。
【0011】
そして、このような構成によれば、操作者の選択によって、当初到着予定時刻に対して予定通りの進行状況であるとみなすことができる所望の時間範囲を設定することができ、自車の進行状況が当該時間範囲を逸脱した場合に自車位置マークの表示内容を変更することが可能となる。
【0012】
さらに、本発明に係るナビゲーション装置の特徴は、時間範囲の設定が、当初到着予定時刻に対する許容進み時間および前記当初到着予定時刻に対する許容遅延時間を設定することによってなされる点にある。
【0013】
そして、このような構成によれば、許容進み時間および許容遅延時間を設定することによって、時間範囲の設定を簡便に行うことが可能となる。
【0014】
さらにまた、本発明に係るナビゲーション装置の特徴は、目的地に到着する前に立ち寄る立ち寄り地点および当該立ち寄り地点における所要時間を設定可能とされ、当該立ち寄り地点における所要時間をも考慮して自車の進行状況を判定可能とされている点にある。
【0015】
そして、このような構成によれば、立ち寄り地点における所要時間をも考慮して自車の進行状況を判定することができ、その判定結果に基づいて自車位置マークの表示内容を変更することが可能となる。
【0016】
また、本発明に係るナビゲーション装置の自車位置表示方法の特徴は、地図上における自車位置を示す自車位置マークを地図情報とともにナビゲーション装置の表示部に表示するナビゲーション装置の自車位置表示方法において、目的地へのルート設定の際に算出された当該目的地への当初到着予定時刻に対する自車の進行状況に応じて、前記自車位置マークの表示内容を変更する点にある。
【0017】
そして、このような方法によれば、当初到着予定時刻に対する自車の進行状況に応じて自車位置マークの表示内容をリアルタイムに変更することが可能となる。
【0018】
さらに、本発明に係るナビゲーション装置の自車位置表示方法の特徴は、当初到着予定時刻に対して予定通りの進行状況であるとみなす時間範囲を設定し、自車の進行状況が当該時間範囲を逸脱した場合に自車位置マークの表示内容を変更する点にある。
【0019】
そして、このような方法によれば、操作者の選択によって、当初到着予定時刻に対して予定通りの進行状況であるとみなすことができる所望の時間範囲を設定することができ、自車の進行状況が当該時間範囲を逸脱した場合に自車位置マークの表示内容を変更することが可能となる。
【0020】
さらにまた、本発明に係るナビゲーション装置の自車位置表示方法の特徴は、当初到着予定時刻に対する許容進み時間および前記当初到着予定時刻に対する許容遅延時間を設定することによって前記時間範囲の設定を行う点にある。
【0021】
そして、このような方法によれば、許容進み時間および許容遅延時間を設定することによって、時間範囲の設定を簡便に行うことが可能となる。
【0022】
また、本発明に係るナビゲーション装置の自車位置表示方法の特徴は、目的地に到着する前に立ち寄る立ち寄り地点および当該立ち寄り地点における所要時間を設定し、当該立ち寄り地点における所要時間をも考慮して進行状況を判定する点にある。
【0023】
そして、このような方法によれば、立ち寄り地点における所要時間をも考慮して進行状況を判定することができ、その判定結果に基づいて自車位置マークの表示内容を変更することが可能となる。
【発明の効果】
【0024】
本発明に係るナビゲーション装置によれば、自車の進行状況に応じて自車位置マークの表示内容をリアルタイムに変更することができる結果、自車位置マークの表示内容によって自車の進行状況を即座に把握することができ、ひいては、
ゆとりを持った安全な運転を行わしめることができ、さらに、その後のドライブプランを立て易くすることができる。
【0025】
また、本発明に係るナビゲーション装置によれば、操作者の選択によって、到着予定時刻に対して予定通りの進行状況であるとみなすことができる所望の時間範囲を設定することができ、自車の進行状況が当該時間範囲を逸脱した場合に自車位置マークの表示内容を変更することができる結果、簡易な手段によって、自車の進行状況に応じた自車位置マークの表示内容の変更を行うことができる。
【0026】
さらに、本発明に係るナビゲーション装置によれば、許容進み時間および許容遅延時間を設定することによって、時間範囲の設定を簡便に行うことができる結果、利便性を向上させることができる。
【0027】
さらにまた、本発明に係るナビゲーション装置によれば、立ち寄り地点における所要時間をも考慮して進行状況を判定することができ、その判定結果に基づいて自車位置マークの表示内容を変更することができる結果、さらに利便性を向上させることができる。
【0028】
また、本発明に係るナビゲーション装置の自車位置表示方法によれば、自車の進行状況に応じて自車位置マークの表示内容をリアルタイムに変更することができる結果、自車位置マークの表示内容によって自車の進行状況を即座に把握することができ、ひいては、ゆとりを持った安全な運転を行わしめることができ、さらに、その後のドライブプランを立て易くすることができる。
【0029】
さらに、ナビゲーション装置の自車位置表示方法によれば、操作者の選択によって、到着予定時刻に対して予定通りの進行状況であるとみなすことができる所望の時間範囲を設定することができ、自車の進行状況が当該時間範囲を逸脱した場合に自車位置マークの表示内容を変更することができる結果、簡便な手法によって、自車の進行状況に応じた自車位置マークの表示内容の変更を行うことができる。
【0030】
さらにまた、本発明に係るナビゲーション装置の自車位置表示方法によれば、許容進み時間および許容遅延時間を設定することによって、時間範囲の設定を簡便に行うことができる結果、さらに利便性を向上させることができる。
【0031】
また、本発明に係るナビゲーション装置の自車位置表示方法によれば、立ち寄り地点における所要時間をも考慮して進行状況を判定することができ、その判定結果に基づいて自車位置マークの表示内容を変更することができる結果、さらに利便性を向上させることができる。
【発明を実施するための最良の形態】
【0032】
以下、本発明に係るナビゲーション装置の実施形態について、図1乃図4を参照して説明する。
【0033】
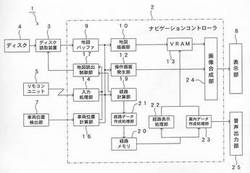
図1に示すように、本実施形態におけるナビゲーション装置1は、ナビゲーションコントローラ2を有しており、このナビゲーションコントローラ2は、自車を目的地まで誘導するナビゲーションのための種々の制御を行うようになっている。
【0034】
ナビゲーションコントローラ2には、ディスク読取装置3が接続されており、このディスク読取装置3には、DVDやCD等のディスク4が装填可能とされている。
【0035】
ディスク読取装置3は、ナビゲーションコントローラ2の制御によって、ディスク4からのデータの読み出しを可能とされている。
【0036】
ディスク4には、地図データとともに、自車位置を示す複数の自車位置マークのデータが記憶されている。
【0037】
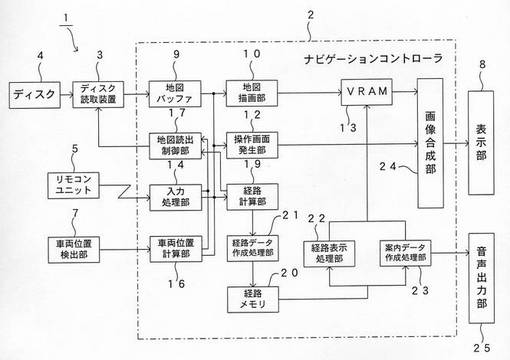
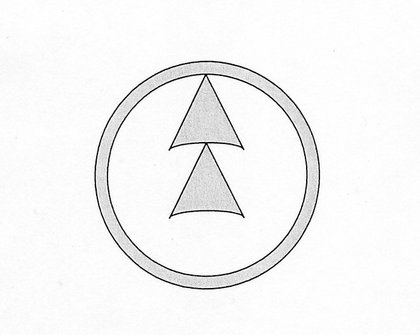
本実施形態においては、複数の自車位置マークのデータ(以下、「自車位置マークデータ」と称する)として、図2乃至図4に示す互いに異なる外観を有する3種類のアイコンを表示内容とするデータが記憶されている。
【0038】
ここで、図2のアイコンは、自車の進行状況が、目的地へのルート設定の際に算出された当初到着予定時刻と比較して予定よりも進んでいる場合に表示されるアイコンである。また、図3のアイコンは、自車の進行状況が、当初到着予定時刻と比較して予定通りである場合に表示されるアイコンである。さらに、図4のアイコンは、自車の進行状況が、当初到着予定時刻と比較して予定よりも遅延している場合に表示されるアイコンである。
【0039】
また、ナビゲーションコントローラ2には、リモコンユニット5が接続されている。このリモコンユニット5は、上下左右の方向を指定するジョイスティック、テンキー、各種の設定を確定する決定キー等の各種の操作キーを有しており、操作内容に応じた入力信号をナビゲーションコントローラ2に出力するようになっている。
【0040】
例えば、リモコンユニット5を操作することによって、出発地や目的地の設定等を行うことができるようになっている。
【0041】
さらに、ナビゲーションコントローラ2には、車両位置検出部7が接続されており、この車両位置検出部7は、例えば、GPS受信機、方位センサ、距離センサ等の装備によって所定のタイミングで自車位置(経度、緯度)の検出を行い、検出結果を検出データとして出力するようになっている。
【0042】
また、ナビゲーションコントローラ2には、ディスプレイ装置としての表示部8が接続されており、この表示部8は、ナビゲーションコントローラ2から出力される描画データに基づいて、自車位置周辺の地図画像や自車位置マーク等の各種画像を表示するようになっている。
【0043】
さらに、ナビゲーションコントローラ2には、スピーカ等の音声出力部25が接続されており、この音声出力部25は、ナビゲーションコントローラ2から出力された音声案内データに基づいて、音声案内を行うようになっている。
【0044】
次に、ナビゲーションコントローラ2の構成について更に詳述する。
【0045】
ナビゲーションコントローラ2は、ディスク読取装置3の出力側に接続された地図バッファ9を有しており、この地図バッファ9には、ディスク読取装置3がディスク4から読み取った地図データおよび自車位置マークデータが一時的に格納されるようになっている。
【0046】
地図バッファ9の出力側には、地図描画部10および操作画面発生部12が接続されている。
【0047】
地図描画部10は、地図バッファ9に格納された地図データに基づいて、地図画像を表示するための地図描画データを作成するようになっている。また、地図描画部10は、地図バッファ9に格納された自車位置マークデータに基づいて、自車位置マークを表示するための自車位置マーク描画データを作成するようになっている。
【0048】
一方、操作画面発生部12は、ユーザが各種の操作指示を行うために必要な操作画面を表示するための描画データを作成するようになっている。
【0049】
地図描画部10の出力側には、VRAM13が接続されており、このVRAM13には、地図描画部10から出力される地図描画データおよび自車位置マーク描画データが一時的に格納されるようになっている。
【0050】
また、ナビゲーションコントローラ2は、リモコンユニット5の出力側に接続された入力処理部14を有しており、この入力処理部14は、リモコンユニット5を用いて行われる各種操作指示に対応する動作を行うための指令をナビゲーションコントローラ2の各部に向けて出力するようになっている。
【0051】
なお、表示部8がタッチパネル方式の場合には、タッチパネルの操作によって、出発地や目的地の設定等を行うことができ、タッチパネルの操作内容に応じた入力信号が入力処理部14に入力されることになる。
【0052】
さらに、ナビゲーションコントローラ2は、車両位置検出部7の出力側に接続された車両位置計算部16を有している。この車両位置計算部16は、車両位置検出部7から出力される検出データに基づいて、車両の現在位置および方位を計算するとともに、計算した車両の現在位置が地図データの道路上にない場合は、これを修正するマップマッチング処理を行うようになっている。
【0053】
地図バッファ9、入力処理部14および車両位置計算部16の出力側には、経路計算部19が接続されており、この経路計算部19は、所定の出発地と目的地との間を所定の条件下で結ぶ走行経路を計算することによって、目的地までの誘導経路の経路探索を行うようになっている。これによって、目的地までのルート設定がなされるようになっている。
【0054】
また、経路計算部19は、ルート設定の際に目的地への当初到着予定時刻を算出し、その結果をデータとして出力するようになっている。
【0055】
さらに、経路計算部19は、自車が一定距離を進行するごとに、現在の進行状況に対応する現在到着予定時刻を算出し、その結果をデータとして、その都度出力するようになっている。なお、前述した一定距離は、予め固定値として設定されているものであってもよいし、また、操作者によって変更可能に設定されるものであってもよい。
【0056】
入力処理部14、車両位置計算部16および経路計算部19の出力側には、地図読出制御部17が接続されており、この地図読出制御部17は、車両位置計算部16により算出される車両の現在位置や、入力処理部14からの要求等に応じて、地図データの読み出し要求をディスク読取装置3に出力するようになっている。
【0057】
本実施形態において、地図読出制御部17は、経路計算部19によって出力された現在到着予定時刻のデータを入力するとともに、この入力した現在到着予定時刻に基づいて、現在の自車の進行状況を判定するようになっている。
【0058】
さらに、地図読出制御部17は、経路計算部19によって出力された当初到着予定時刻のデータを入力するとともに、この入力した当初到着予定時刻に対する現在の自車の進行状況に応じた自車位置マークを選択するための制御信号を、ディスク読取装置3に対して出力するようになっている。
【0059】
そして、ディスク読取装置3は、地図読出制御部17から出力された制御信号に応じた自車位置マークデータをディスク4から読み出すようになっている。
【0060】
これにより、当初到着予定時刻に対する自車の進行状況に応じて、自車位置マークの表示内容をリアルタイムに変更することができるようになっている。
【0061】
さらに、本実施形態においては、操作者が、リモコンユニット5または表示部8のタッチパネルを操作することによって、当初到着予定時刻に対して予定通りの進行状況であるとみなす時間範囲を設定することができるようになっている。
【0062】
そして、地図読出制御部17は、自車の進行状況が当該時間範囲を逸脱した場合に、自車位置マークの選択を切り換えるようになっている。
【0063】
これにより、簡易な手段によって、自車の進行状況に応じた自車位置マークの表示内容の変更を行うことができるようになっている。
【0064】
さらに、本実施形態においては、リモコンユニット5または表示部8のタッチパネルの操作によって、当初到着予定時刻に対する許容進み時間Th および当初到着予定時刻に対する許容遅延時間Td を設定することによって、前記時間範囲を簡易に設定することができるようになっている。
【0065】
より具体的には、現在到着予定時刻が、当初到着予定時刻から許容進み時間Thを減算した時刻よりも早い時刻の場合には、地図読出制御部17は、自車の進行状況が予定よりも進んでいると判定するようになっている。そして、この場合には、地図読出制御部17は、図2に示したアイコンのデータを読み出すための制御信号を、ディスク読取装置3に対して出力するようになっている。
【0066】
また、現在到着予定時刻が、当初到着予定時刻から許容進み時間Th を減算した時刻よりも遅い時刻であり、かつ、当初到着予定時刻に許容遅延時間Td を加算した時刻よりも早い時刻である場合には、地図読出制御部17は、自車の進行状況が予定通りであると判定するようになっている。そして、この場合には、地図読出制御部17は、図3に示したアイコンのデータを読み出すための制御信号を、ディスク読取装置3に対して出力するようになっている。
【0067】
さらに、現在到着予定時刻が、当初到着予定時刻に許容遅延時間Td を加算した時刻よりも遅い時刻の場合には、地図読出制御部17は、自車の進行状況が予定よりも遅れていると判定するようになっている。そして、この場合には、地図読出制御部17は、図4に示したアイコンのデータを読み出すための制御信号を、ディスク読取装置3に対して出力するようになっている。
【0068】
さらに、本実施形態においては、操作者がリモコンユニット5や表示部8のタッチパネルを操作することによって、目的地に到着する前に立ち寄る立ち寄り地点と、当該立ち寄り地点における所要時間とを設定することができるようになっている。
【0069】
そして、経路計算部19は、当該所要時間を加算して当初到着予定時刻および現在到着予定時刻を算出するようになっている。
【0070】
これにより、地図読出制御部17は、当該立ち寄り地点における所要時間をも考慮して自車の進行状況を判定することができるようになっている。
【0071】
経路計算部19の出力側には、更に経路データ作成処理部21が接続されており、この経路データ作成処理部21は、経路計算部19によって設定されたルートに対応する経路データを作成して出力するようになっている。
【0072】
経路データ作成処理部21の出力側には、経路メモリ20が接続されており、この経路メモリ20は、前記経路データ作成処理部21によって作成された経路データを記憶するようになっている。
【0073】
経路メモリ20の出力側には、経路表示処理部22が接続されており、この経路表示処理部22は、経路メモリ20に記憶されている経路データを地図上に重ねて表示するための描画データを生成してVRAM13に対して出力するようになっている。
【0074】
また、経路メモリ20には、案内データ作成処理部23が接続されている。この案内データ作成処理部23は、前記経路メモリ20に記憶されている経路データに基づいて、所定のタイミングで交差点案内表示等の細かな案内処理を行うための描画データを画像案内データとして作成してVRAM13に対して出力するようになっている。さらに、案内データ作成処理部23は、案内処理を行うための音声案内データを作成して音声出力部25に対して出力するようになっている。
【0075】
VRAM13および操作画面発生部12の出力側には、画像合成部24が接続されており、この画像合成部24は、VRAM13から読み出した描画データおよび自車位置マーク描画データと、操作画面発生部12から出力される描画データとを重ね合わせて画像合成を行うとともに、合成描画データを表示部8に対して出力するようになっている。
【0076】
次に、本発明に係るナビゲーション装置の自車位置表示方法について、図5を参照して説明する。
【0077】
なお、本実施形態におけるナビゲーション装置の自車位置表示方法は、図1に示したナビゲーション装置1を用いて行うこととする。
【0078】
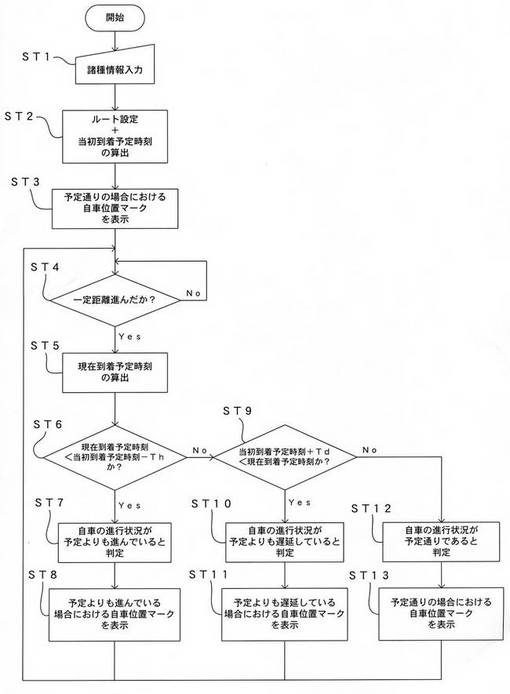
本実施形態においては、ナビゲーションの処理を開始した後、まず、図5のステップ1(ST1)において、操作者がリモコンユニット5または表示部8のタッチパネルを操作することによって、ルート設定のための諸種の入力情報を入力する。入力情報としては、出発地、目的地、許容進み時間Th 、許容遅延時間Td 、立ち寄り地点および立ち寄り地点における所要時間等が挙げられる。
【0079】
次いで、ステップ2(ST2)においては、経路計算部19によって入力情報に応じたルート設定を行うとともに、当初到着予定時刻を算出する。
【0080】
次いで、ステップ3(ST3)においては、表示部8に、ステップ2(ST2)において設定されたルートに対応する経路を、地図上に重ねて表示するとともに、自車位置マークとして、自車の進行状況が予定通りである場合における自車位置マーク(図3参照)を表示する。
【0081】
そして、表示部8に表示された経路を参照しながら自車を走行させると、ステップ4(ST4)において、自車が一定距離を進行したか否かを判断し、進行した場合にはステップ5(ST5)に進み、進行していない場合には、同じ判断を繰り返し行う。
【0082】
ステップ5(ST5)においては、経路計算部19によって現在到着予定時刻を算出させる。
【0083】
次いでステップ6(ST6)においては、地図読出制御部17によって、現在到着予定時刻が、当初到着予定時刻から許容進み時間Thを減算した時刻よりも早い時刻であるか否かを判断し、早い時刻である場合にはステップ7(ST7)に進み、早い時刻でない場合には、ステップ9(ST9)に進む。
【0084】
ステップ7(ST7)において、地図読出制御部17は、自車の進行状況が予定よりも進んでいると判定する。そして、続くステップ8(ST8)において、ディスク読取装置3によって、自車の進行状況が予定よりも進んでいる場合における自車位置マーク(図2参照)をディスク4から読み出させ、当該自車位置マークを表示部8に表示させた後にステップ4(ST4)に戻る。
【0085】
一方、ステップ9(ST9)においては、地図読出制御部17によって、現在到着予定時刻が、当初到着予定時刻に許容遅延時間Td を加算した時刻よりも遅い時刻であるか否かを判断し、遅い時刻である場合にはステップ10(ST10)に進み、遅い時刻でない場合にはステップ12(ST12)に進む。
【0086】
ステップ10(ST10)において、地図読出制御部17は、自車の進行状況が予定よりも遅れていると判定する。そして、続くステップ11において、ディスク読取装置3によって、自車の進行状況が予定よりも遅延している場合における自車位置マーク(図4参照)をディスク4から読み出させ、当該自車位置マークを表示部8に表示させた後にステップ4(ST4)に戻る。
【0087】
一方、ステップ12(ST12)において、地図読出制御部17は、自車の進行状況が予定通りであると判定する。そして、続くステップ13において、ディスク読取装置3に、自車の進行状況が予定通りである場合における自車位置マーク(図3参照)をディスク4から読み出させ、当該自車位置マークを表示部8に表示させた後にステップ4(ST4)に戻る。
【0088】
このように、本実施形態においては、自車の進行状況に応じて自車位置マークの表示内容を変更することができるため、操作者が自車位置マークの表示内容によって自車の進行状況を即座に把握することができる。
【0089】
なお、本発明は、前述した実施の形態に限定されるものではなく、必要に応じて種々の変更が可能である。
【0090】
例えば、本発明は、通信ナビ等の図1に示した構成以外のナビゲーション装置にも有効に適用することができるものである。
【0091】
さらに、自車位置マークとしては、矢印形状のアイコンに限らず、他の外観を有するマークを採用してもよいことは勿論である。例えば、自車の進行状況が予定よりも進んでいる場合には、兎のアイコンを表示し、予定よりも遅延している場合には亀のアイコンを表示するようにしてもよい。
【図面の簡単な説明】
【0092】
【図1】本発明に係るナビゲーション装置の実施形態を示すブロック図
【図2】本発明に係るナビゲーション装置の実施形態において、自車位置マークの表示内容の一例を示す図
【図3】本発明に係るナビゲーション装置の実施形態において、自車位置マークの表示内容の図2と異なる他の一例を示す図
【図4】本発明に係るナビゲーション装置の実施形態において、自車位置マークの表示内容の図2および図3と異なる他の一例を示す図
【図5】本発明に係るナビゲーション装置の自車位置表示方法の実施形態を示すフローチャート
【符号の説明】
【0093】
1 ナビゲーション装置
2 ナビゲーションコントローラ
3 ディスク読取装置
4 ディスク
5 リモコンユニット
8 表示部
17 地図読出制御部
19 経路計算部
【技術分野】
【0001】
本発明は、ナビゲーション装置およびその自車位置表示方法に係り、特に、地図上における自車位置を示す自車位置マークを表示部に表示するのに好適なナビゲーション装置およびその自車位置表示方法に関する。
【背景技術】
【0002】
従来から、ナビゲーション装置においては、自車を目的地に案内するルート案内を行う際に、表示部に道路やランドマーク等の地図情報とともに地図上における自車位置を示す自車位置マークを表示することが行われていた。通常、自車位置マークは、矢印の形状のアイコンである場合が多かった。
【0003】
また、従来から、ナビゲーション装置においては、表示部に目安として目的地への到着予定時刻を表示したり、全行程に対する進行状況を表示したりすることが可能とされていた。
【0004】
【特許文献1】特開2000−258173号公報
【特許文献2】特開2002−181553号公報
【特許文献3】特開2004−45237号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の自車位置マークの表示内容では、ルート設定時に算出された当初到着予定時刻に対する自車の進行状況、すなわち、当初の予定よりも遅れているのか、進んでいるのか、あるいは予定通りなのかを即座に判断することができないといった問題が生じていた。
【0006】
例えば、現状のナビゲーション装置において、表示部に表示される到着予定時刻は、自車の進行状況に応じて変動するものであるため、運転者等の操作者は、ルート設定の際に算出された当初到着予定時刻を覚えていなければ自車の進行状況を的確に把握することができなかった。
【0007】
そこで、本発明は、このような問題点に鑑みなされたものであり、自車位置マークの表示内容によって自車の進行状況を即座に把握することができ、ひいては、
ゆとりを持った安全な運転を行わしめることができ、さらに、その後のドライブプランを立て易くすることができるナビゲーション装置およびその自車位置表示方法を提供することを目的とするものである。
【課題を解決するための手段】
【0008】
前述した目的を達成するため、本発明に係るナビゲーション装置の特徴は、地図上における自車位置を示す自車位置マークを地図情報とともに表示部に表示可能とされ、目的地への到着予定時刻を算出可能とされたナビゲーション装置において、前記目的地へのルート設定の際に算出された当初到着予定時刻に対する自車の進行状況に応じて、前記自車位置マークの表示内容を変更可能とされている点にある。
【0009】
そして、このような構成によれば、当初到着予定時刻に対する自車の進行状況に応じて自車位置マークの表示内容をリアルタイムに変更することが可能となる。
【0010】
また、本発明に係るナビゲーション装置の特徴は、当初到着予定時刻に対して予定通りの進行状況であるとみなす時間範囲を設定可能とされ、自車の進行状況が当該時間範囲を逸脱した場合に自車位置マークの表示内容を変更可能とされている点にある。
【0011】
そして、このような構成によれば、操作者の選択によって、当初到着予定時刻に対して予定通りの進行状況であるとみなすことができる所望の時間範囲を設定することができ、自車の進行状況が当該時間範囲を逸脱した場合に自車位置マークの表示内容を変更することが可能となる。
【0012】
さらに、本発明に係るナビゲーション装置の特徴は、時間範囲の設定が、当初到着予定時刻に対する許容進み時間および前記当初到着予定時刻に対する許容遅延時間を設定することによってなされる点にある。
【0013】
そして、このような構成によれば、許容進み時間および許容遅延時間を設定することによって、時間範囲の設定を簡便に行うことが可能となる。
【0014】
さらにまた、本発明に係るナビゲーション装置の特徴は、目的地に到着する前に立ち寄る立ち寄り地点および当該立ち寄り地点における所要時間を設定可能とされ、当該立ち寄り地点における所要時間をも考慮して自車の進行状況を判定可能とされている点にある。
【0015】
そして、このような構成によれば、立ち寄り地点における所要時間をも考慮して自車の進行状況を判定することができ、その判定結果に基づいて自車位置マークの表示内容を変更することが可能となる。
【0016】
また、本発明に係るナビゲーション装置の自車位置表示方法の特徴は、地図上における自車位置を示す自車位置マークを地図情報とともにナビゲーション装置の表示部に表示するナビゲーション装置の自車位置表示方法において、目的地へのルート設定の際に算出された当該目的地への当初到着予定時刻に対する自車の進行状況に応じて、前記自車位置マークの表示内容を変更する点にある。
【0017】
そして、このような方法によれば、当初到着予定時刻に対する自車の進行状況に応じて自車位置マークの表示内容をリアルタイムに変更することが可能となる。
【0018】
さらに、本発明に係るナビゲーション装置の自車位置表示方法の特徴は、当初到着予定時刻に対して予定通りの進行状況であるとみなす時間範囲を設定し、自車の進行状況が当該時間範囲を逸脱した場合に自車位置マークの表示内容を変更する点にある。
【0019】
そして、このような方法によれば、操作者の選択によって、当初到着予定時刻に対して予定通りの進行状況であるとみなすことができる所望の時間範囲を設定することができ、自車の進行状況が当該時間範囲を逸脱した場合に自車位置マークの表示内容を変更することが可能となる。
【0020】
さらにまた、本発明に係るナビゲーション装置の自車位置表示方法の特徴は、当初到着予定時刻に対する許容進み時間および前記当初到着予定時刻に対する許容遅延時間を設定することによって前記時間範囲の設定を行う点にある。
【0021】
そして、このような方法によれば、許容進み時間および許容遅延時間を設定することによって、時間範囲の設定を簡便に行うことが可能となる。
【0022】
また、本発明に係るナビゲーション装置の自車位置表示方法の特徴は、目的地に到着する前に立ち寄る立ち寄り地点および当該立ち寄り地点における所要時間を設定し、当該立ち寄り地点における所要時間をも考慮して進行状況を判定する点にある。
【0023】
そして、このような方法によれば、立ち寄り地点における所要時間をも考慮して進行状況を判定することができ、その判定結果に基づいて自車位置マークの表示内容を変更することが可能となる。
【発明の効果】
【0024】
本発明に係るナビゲーション装置によれば、自車の進行状況に応じて自車位置マークの表示内容をリアルタイムに変更することができる結果、自車位置マークの表示内容によって自車の進行状況を即座に把握することができ、ひいては、
ゆとりを持った安全な運転を行わしめることができ、さらに、その後のドライブプランを立て易くすることができる。
【0025】
また、本発明に係るナビゲーション装置によれば、操作者の選択によって、到着予定時刻に対して予定通りの進行状況であるとみなすことができる所望の時間範囲を設定することができ、自車の進行状況が当該時間範囲を逸脱した場合に自車位置マークの表示内容を変更することができる結果、簡易な手段によって、自車の進行状況に応じた自車位置マークの表示内容の変更を行うことができる。
【0026】
さらに、本発明に係るナビゲーション装置によれば、許容進み時間および許容遅延時間を設定することによって、時間範囲の設定を簡便に行うことができる結果、利便性を向上させることができる。
【0027】
さらにまた、本発明に係るナビゲーション装置によれば、立ち寄り地点における所要時間をも考慮して進行状況を判定することができ、その判定結果に基づいて自車位置マークの表示内容を変更することができる結果、さらに利便性を向上させることができる。
【0028】
また、本発明に係るナビゲーション装置の自車位置表示方法によれば、自車の進行状況に応じて自車位置マークの表示内容をリアルタイムに変更することができる結果、自車位置マークの表示内容によって自車の進行状況を即座に把握することができ、ひいては、ゆとりを持った安全な運転を行わしめることができ、さらに、その後のドライブプランを立て易くすることができる。
【0029】
さらに、ナビゲーション装置の自車位置表示方法によれば、操作者の選択によって、到着予定時刻に対して予定通りの進行状況であるとみなすことができる所望の時間範囲を設定することができ、自車の進行状況が当該時間範囲を逸脱した場合に自車位置マークの表示内容を変更することができる結果、簡便な手法によって、自車の進行状況に応じた自車位置マークの表示内容の変更を行うことができる。
【0030】
さらにまた、本発明に係るナビゲーション装置の自車位置表示方法によれば、許容進み時間および許容遅延時間を設定することによって、時間範囲の設定を簡便に行うことができる結果、さらに利便性を向上させることができる。
【0031】
また、本発明に係るナビゲーション装置の自車位置表示方法によれば、立ち寄り地点における所要時間をも考慮して進行状況を判定することができ、その判定結果に基づいて自車位置マークの表示内容を変更することができる結果、さらに利便性を向上させることができる。
【発明を実施するための最良の形態】
【0032】
以下、本発明に係るナビゲーション装置の実施形態について、図1乃図4を参照して説明する。
【0033】
図1に示すように、本実施形態におけるナビゲーション装置1は、ナビゲーションコントローラ2を有しており、このナビゲーションコントローラ2は、自車を目的地まで誘導するナビゲーションのための種々の制御を行うようになっている。
【0034】
ナビゲーションコントローラ2には、ディスク読取装置3が接続されており、このディスク読取装置3には、DVDやCD等のディスク4が装填可能とされている。
【0035】
ディスク読取装置3は、ナビゲーションコントローラ2の制御によって、ディスク4からのデータの読み出しを可能とされている。
【0036】
ディスク4には、地図データとともに、自車位置を示す複数の自車位置マークのデータが記憶されている。
【0037】
本実施形態においては、複数の自車位置マークのデータ(以下、「自車位置マークデータ」と称する)として、図2乃至図4に示す互いに異なる外観を有する3種類のアイコンを表示内容とするデータが記憶されている。
【0038】
ここで、図2のアイコンは、自車の進行状況が、目的地へのルート設定の際に算出された当初到着予定時刻と比較して予定よりも進んでいる場合に表示されるアイコンである。また、図3のアイコンは、自車の進行状況が、当初到着予定時刻と比較して予定通りである場合に表示されるアイコンである。さらに、図4のアイコンは、自車の進行状況が、当初到着予定時刻と比較して予定よりも遅延している場合に表示されるアイコンである。
【0039】
また、ナビゲーションコントローラ2には、リモコンユニット5が接続されている。このリモコンユニット5は、上下左右の方向を指定するジョイスティック、テンキー、各種の設定を確定する決定キー等の各種の操作キーを有しており、操作内容に応じた入力信号をナビゲーションコントローラ2に出力するようになっている。
【0040】
例えば、リモコンユニット5を操作することによって、出発地や目的地の設定等を行うことができるようになっている。
【0041】
さらに、ナビゲーションコントローラ2には、車両位置検出部7が接続されており、この車両位置検出部7は、例えば、GPS受信機、方位センサ、距離センサ等の装備によって所定のタイミングで自車位置(経度、緯度)の検出を行い、検出結果を検出データとして出力するようになっている。
【0042】
また、ナビゲーションコントローラ2には、ディスプレイ装置としての表示部8が接続されており、この表示部8は、ナビゲーションコントローラ2から出力される描画データに基づいて、自車位置周辺の地図画像や自車位置マーク等の各種画像を表示するようになっている。
【0043】
さらに、ナビゲーションコントローラ2には、スピーカ等の音声出力部25が接続されており、この音声出力部25は、ナビゲーションコントローラ2から出力された音声案内データに基づいて、音声案内を行うようになっている。
【0044】
次に、ナビゲーションコントローラ2の構成について更に詳述する。
【0045】
ナビゲーションコントローラ2は、ディスク読取装置3の出力側に接続された地図バッファ9を有しており、この地図バッファ9には、ディスク読取装置3がディスク4から読み取った地図データおよび自車位置マークデータが一時的に格納されるようになっている。
【0046】
地図バッファ9の出力側には、地図描画部10および操作画面発生部12が接続されている。
【0047】
地図描画部10は、地図バッファ9に格納された地図データに基づいて、地図画像を表示するための地図描画データを作成するようになっている。また、地図描画部10は、地図バッファ9に格納された自車位置マークデータに基づいて、自車位置マークを表示するための自車位置マーク描画データを作成するようになっている。
【0048】
一方、操作画面発生部12は、ユーザが各種の操作指示を行うために必要な操作画面を表示するための描画データを作成するようになっている。
【0049】
地図描画部10の出力側には、VRAM13が接続されており、このVRAM13には、地図描画部10から出力される地図描画データおよび自車位置マーク描画データが一時的に格納されるようになっている。
【0050】
また、ナビゲーションコントローラ2は、リモコンユニット5の出力側に接続された入力処理部14を有しており、この入力処理部14は、リモコンユニット5を用いて行われる各種操作指示に対応する動作を行うための指令をナビゲーションコントローラ2の各部に向けて出力するようになっている。
【0051】
なお、表示部8がタッチパネル方式の場合には、タッチパネルの操作によって、出発地や目的地の設定等を行うことができ、タッチパネルの操作内容に応じた入力信号が入力処理部14に入力されることになる。
【0052】
さらに、ナビゲーションコントローラ2は、車両位置検出部7の出力側に接続された車両位置計算部16を有している。この車両位置計算部16は、車両位置検出部7から出力される検出データに基づいて、車両の現在位置および方位を計算するとともに、計算した車両の現在位置が地図データの道路上にない場合は、これを修正するマップマッチング処理を行うようになっている。
【0053】
地図バッファ9、入力処理部14および車両位置計算部16の出力側には、経路計算部19が接続されており、この経路計算部19は、所定の出発地と目的地との間を所定の条件下で結ぶ走行経路を計算することによって、目的地までの誘導経路の経路探索を行うようになっている。これによって、目的地までのルート設定がなされるようになっている。
【0054】
また、経路計算部19は、ルート設定の際に目的地への当初到着予定時刻を算出し、その結果をデータとして出力するようになっている。
【0055】
さらに、経路計算部19は、自車が一定距離を進行するごとに、現在の進行状況に対応する現在到着予定時刻を算出し、その結果をデータとして、その都度出力するようになっている。なお、前述した一定距離は、予め固定値として設定されているものであってもよいし、また、操作者によって変更可能に設定されるものであってもよい。
【0056】
入力処理部14、車両位置計算部16および経路計算部19の出力側には、地図読出制御部17が接続されており、この地図読出制御部17は、車両位置計算部16により算出される車両の現在位置や、入力処理部14からの要求等に応じて、地図データの読み出し要求をディスク読取装置3に出力するようになっている。
【0057】
本実施形態において、地図読出制御部17は、経路計算部19によって出力された現在到着予定時刻のデータを入力するとともに、この入力した現在到着予定時刻に基づいて、現在の自車の進行状況を判定するようになっている。
【0058】
さらに、地図読出制御部17は、経路計算部19によって出力された当初到着予定時刻のデータを入力するとともに、この入力した当初到着予定時刻に対する現在の自車の進行状況に応じた自車位置マークを選択するための制御信号を、ディスク読取装置3に対して出力するようになっている。
【0059】
そして、ディスク読取装置3は、地図読出制御部17から出力された制御信号に応じた自車位置マークデータをディスク4から読み出すようになっている。
【0060】
これにより、当初到着予定時刻に対する自車の進行状況に応じて、自車位置マークの表示内容をリアルタイムに変更することができるようになっている。
【0061】
さらに、本実施形態においては、操作者が、リモコンユニット5または表示部8のタッチパネルを操作することによって、当初到着予定時刻に対して予定通りの進行状況であるとみなす時間範囲を設定することができるようになっている。
【0062】
そして、地図読出制御部17は、自車の進行状況が当該時間範囲を逸脱した場合に、自車位置マークの選択を切り換えるようになっている。
【0063】
これにより、簡易な手段によって、自車の進行状況に応じた自車位置マークの表示内容の変更を行うことができるようになっている。
【0064】
さらに、本実施形態においては、リモコンユニット5または表示部8のタッチパネルの操作によって、当初到着予定時刻に対する許容進み時間Th および当初到着予定時刻に対する許容遅延時間Td を設定することによって、前記時間範囲を簡易に設定することができるようになっている。
【0065】
より具体的には、現在到着予定時刻が、当初到着予定時刻から許容進み時間Thを減算した時刻よりも早い時刻の場合には、地図読出制御部17は、自車の進行状況が予定よりも進んでいると判定するようになっている。そして、この場合には、地図読出制御部17は、図2に示したアイコンのデータを読み出すための制御信号を、ディスク読取装置3に対して出力するようになっている。
【0066】
また、現在到着予定時刻が、当初到着予定時刻から許容進み時間Th を減算した時刻よりも遅い時刻であり、かつ、当初到着予定時刻に許容遅延時間Td を加算した時刻よりも早い時刻である場合には、地図読出制御部17は、自車の進行状況が予定通りであると判定するようになっている。そして、この場合には、地図読出制御部17は、図3に示したアイコンのデータを読み出すための制御信号を、ディスク読取装置3に対して出力するようになっている。
【0067】
さらに、現在到着予定時刻が、当初到着予定時刻に許容遅延時間Td を加算した時刻よりも遅い時刻の場合には、地図読出制御部17は、自車の進行状況が予定よりも遅れていると判定するようになっている。そして、この場合には、地図読出制御部17は、図4に示したアイコンのデータを読み出すための制御信号を、ディスク読取装置3に対して出力するようになっている。
【0068】
さらに、本実施形態においては、操作者がリモコンユニット5や表示部8のタッチパネルを操作することによって、目的地に到着する前に立ち寄る立ち寄り地点と、当該立ち寄り地点における所要時間とを設定することができるようになっている。
【0069】
そして、経路計算部19は、当該所要時間を加算して当初到着予定時刻および現在到着予定時刻を算出するようになっている。
【0070】
これにより、地図読出制御部17は、当該立ち寄り地点における所要時間をも考慮して自車の進行状況を判定することができるようになっている。
【0071】
経路計算部19の出力側には、更に経路データ作成処理部21が接続されており、この経路データ作成処理部21は、経路計算部19によって設定されたルートに対応する経路データを作成して出力するようになっている。
【0072】
経路データ作成処理部21の出力側には、経路メモリ20が接続されており、この経路メモリ20は、前記経路データ作成処理部21によって作成された経路データを記憶するようになっている。
【0073】
経路メモリ20の出力側には、経路表示処理部22が接続されており、この経路表示処理部22は、経路メモリ20に記憶されている経路データを地図上に重ねて表示するための描画データを生成してVRAM13に対して出力するようになっている。
【0074】
また、経路メモリ20には、案内データ作成処理部23が接続されている。この案内データ作成処理部23は、前記経路メモリ20に記憶されている経路データに基づいて、所定のタイミングで交差点案内表示等の細かな案内処理を行うための描画データを画像案内データとして作成してVRAM13に対して出力するようになっている。さらに、案内データ作成処理部23は、案内処理を行うための音声案内データを作成して音声出力部25に対して出力するようになっている。
【0075】
VRAM13および操作画面発生部12の出力側には、画像合成部24が接続されており、この画像合成部24は、VRAM13から読み出した描画データおよび自車位置マーク描画データと、操作画面発生部12から出力される描画データとを重ね合わせて画像合成を行うとともに、合成描画データを表示部8に対して出力するようになっている。
【0076】
次に、本発明に係るナビゲーション装置の自車位置表示方法について、図5を参照して説明する。
【0077】
なお、本実施形態におけるナビゲーション装置の自車位置表示方法は、図1に示したナビゲーション装置1を用いて行うこととする。
【0078】
本実施形態においては、ナビゲーションの処理を開始した後、まず、図5のステップ1(ST1)において、操作者がリモコンユニット5または表示部8のタッチパネルを操作することによって、ルート設定のための諸種の入力情報を入力する。入力情報としては、出発地、目的地、許容進み時間Th 、許容遅延時間Td 、立ち寄り地点および立ち寄り地点における所要時間等が挙げられる。
【0079】
次いで、ステップ2(ST2)においては、経路計算部19によって入力情報に応じたルート設定を行うとともに、当初到着予定時刻を算出する。
【0080】
次いで、ステップ3(ST3)においては、表示部8に、ステップ2(ST2)において設定されたルートに対応する経路を、地図上に重ねて表示するとともに、自車位置マークとして、自車の進行状況が予定通りである場合における自車位置マーク(図3参照)を表示する。
【0081】
そして、表示部8に表示された経路を参照しながら自車を走行させると、ステップ4(ST4)において、自車が一定距離を進行したか否かを判断し、進行した場合にはステップ5(ST5)に進み、進行していない場合には、同じ判断を繰り返し行う。
【0082】
ステップ5(ST5)においては、経路計算部19によって現在到着予定時刻を算出させる。
【0083】
次いでステップ6(ST6)においては、地図読出制御部17によって、現在到着予定時刻が、当初到着予定時刻から許容進み時間Thを減算した時刻よりも早い時刻であるか否かを判断し、早い時刻である場合にはステップ7(ST7)に進み、早い時刻でない場合には、ステップ9(ST9)に進む。
【0084】
ステップ7(ST7)において、地図読出制御部17は、自車の進行状況が予定よりも進んでいると判定する。そして、続くステップ8(ST8)において、ディスク読取装置3によって、自車の進行状況が予定よりも進んでいる場合における自車位置マーク(図2参照)をディスク4から読み出させ、当該自車位置マークを表示部8に表示させた後にステップ4(ST4)に戻る。
【0085】
一方、ステップ9(ST9)においては、地図読出制御部17によって、現在到着予定時刻が、当初到着予定時刻に許容遅延時間Td を加算した時刻よりも遅い時刻であるか否かを判断し、遅い時刻である場合にはステップ10(ST10)に進み、遅い時刻でない場合にはステップ12(ST12)に進む。
【0086】
ステップ10(ST10)において、地図読出制御部17は、自車の進行状況が予定よりも遅れていると判定する。そして、続くステップ11において、ディスク読取装置3によって、自車の進行状況が予定よりも遅延している場合における自車位置マーク(図4参照)をディスク4から読み出させ、当該自車位置マークを表示部8に表示させた後にステップ4(ST4)に戻る。
【0087】
一方、ステップ12(ST12)において、地図読出制御部17は、自車の進行状況が予定通りであると判定する。そして、続くステップ13において、ディスク読取装置3に、自車の進行状況が予定通りである場合における自車位置マーク(図3参照)をディスク4から読み出させ、当該自車位置マークを表示部8に表示させた後にステップ4(ST4)に戻る。
【0088】
このように、本実施形態においては、自車の進行状況に応じて自車位置マークの表示内容を変更することができるため、操作者が自車位置マークの表示内容によって自車の進行状況を即座に把握することができる。
【0089】
なお、本発明は、前述した実施の形態に限定されるものではなく、必要に応じて種々の変更が可能である。
【0090】
例えば、本発明は、通信ナビ等の図1に示した構成以外のナビゲーション装置にも有効に適用することができるものである。
【0091】
さらに、自車位置マークとしては、矢印形状のアイコンに限らず、他の外観を有するマークを採用してもよいことは勿論である。例えば、自車の進行状況が予定よりも進んでいる場合には、兎のアイコンを表示し、予定よりも遅延している場合には亀のアイコンを表示するようにしてもよい。
【図面の簡単な説明】
【0092】
【図1】本発明に係るナビゲーション装置の実施形態を示すブロック図
【図2】本発明に係るナビゲーション装置の実施形態において、自車位置マークの表示内容の一例を示す図
【図3】本発明に係るナビゲーション装置の実施形態において、自車位置マークの表示内容の図2と異なる他の一例を示す図
【図4】本発明に係るナビゲーション装置の実施形態において、自車位置マークの表示内容の図2および図3と異なる他の一例を示す図
【図5】本発明に係るナビゲーション装置の自車位置表示方法の実施形態を示すフローチャート
【符号の説明】
【0093】
1 ナビゲーション装置
2 ナビゲーションコントローラ
3 ディスク読取装置
4 ディスク
5 リモコンユニット
8 表示部
17 地図読出制御部
19 経路計算部
【特許請求の範囲】
【請求項1】
地図上における自車位置を示す自車位置マークを地図情報とともに表示部に表示可能とされ、目的地への到着予定時刻を算出可能とされたナビゲーション装置において、
前記目的地へのルート設定の際に算出された当初到着予定時刻に対する自車の進行状況に応じて、前記自車位置マークの表示内容を変更可能とされていることを特徴とするナビゲーション装置。
【請求項2】
前記当初到着予定時刻に対して予定通りの進行状況であるとみなす時間範囲を設定可能とされ、自車の進行状況が当該時間範囲を逸脱した場合に前記自車位置マークの表示内容を変更可能とされていることを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記時間範囲の設定は、前記当初到着予定時刻に対する許容進み時間および前記当初到着予定時刻に対する許容遅延時間を設定することによってなされることを特徴とする請求項2に記載のナビゲーション装置。
【請求項4】
前記目的地に到着する前に立ち寄る立ち寄り地点および当該立ち寄り地点における所要時間を設定可能とされ、当該立ち寄り地点における所要時間をも考慮して自車の進行状況を判定可能とされていることを特徴とする請求項1乃至請求項3のいずれか1項に記載のナビゲーション装置。
【請求項5】
地図上における自車位置を示す自車位置マークを地図情報とともにナビゲーション装置の表示部に表示するナビゲーション装置の自車位置表示方法において、
目的地へのルート設定の際に算出された当該目的地への当初到着予定時刻に対する自車の進行状況に応じて、前記自車位置マークの表示内容を変更することを特徴とするナビゲーション装置の自車位置表示方法。
【請求項6】
前記当初到着予定時刻に対して予定通りの進行状況であるとみなす時間範囲を設定し、自車の進行状況が当該時間範囲を逸脱した場合に前記自車位置マークの表示内容を変更することを特徴とする請求項5に記載のナビゲーション装置の自車位置表示方法。
【請求項7】
前記当初到着予定時刻に対する許容進み時間および前記当初到着予定時刻に対する許容遅延時間を設定することによって前記時間範囲の設定を行うことを特徴とする請求項6に記載のナビゲーション装置の自車位置表示方法。
【請求項8】
目的地に到着する前に立ち寄る立ち寄り地点および当該立ち寄り地点における所要時間を設定し、当該立ち寄り地点における所要時間をも考慮して自車の進行状況を判定することを特徴とする請求項5乃至請求項7のいずれか1項に記載のナビゲーション装置の自車位置表示方法。
【請求項1】
地図上における自車位置を示す自車位置マークを地図情報とともに表示部に表示可能とされ、目的地への到着予定時刻を算出可能とされたナビゲーション装置において、
前記目的地へのルート設定の際に算出された当初到着予定時刻に対する自車の進行状況に応じて、前記自車位置マークの表示内容を変更可能とされていることを特徴とするナビゲーション装置。
【請求項2】
前記当初到着予定時刻に対して予定通りの進行状況であるとみなす時間範囲を設定可能とされ、自車の進行状況が当該時間範囲を逸脱した場合に前記自車位置マークの表示内容を変更可能とされていることを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記時間範囲の設定は、前記当初到着予定時刻に対する許容進み時間および前記当初到着予定時刻に対する許容遅延時間を設定することによってなされることを特徴とする請求項2に記載のナビゲーション装置。
【請求項4】
前記目的地に到着する前に立ち寄る立ち寄り地点および当該立ち寄り地点における所要時間を設定可能とされ、当該立ち寄り地点における所要時間をも考慮して自車の進行状況を判定可能とされていることを特徴とする請求項1乃至請求項3のいずれか1項に記載のナビゲーション装置。
【請求項5】
地図上における自車位置を示す自車位置マークを地図情報とともにナビゲーション装置の表示部に表示するナビゲーション装置の自車位置表示方法において、
目的地へのルート設定の際に算出された当該目的地への当初到着予定時刻に対する自車の進行状況に応じて、前記自車位置マークの表示内容を変更することを特徴とするナビゲーション装置の自車位置表示方法。
【請求項6】
前記当初到着予定時刻に対して予定通りの進行状況であるとみなす時間範囲を設定し、自車の進行状況が当該時間範囲を逸脱した場合に前記自車位置マークの表示内容を変更することを特徴とする請求項5に記載のナビゲーション装置の自車位置表示方法。
【請求項7】
前記当初到着予定時刻に対する許容進み時間および前記当初到着予定時刻に対する許容遅延時間を設定することによって前記時間範囲の設定を行うことを特徴とする請求項6に記載のナビゲーション装置の自車位置表示方法。
【請求項8】
目的地に到着する前に立ち寄る立ち寄り地点および当該立ち寄り地点における所要時間を設定し、当該立ち寄り地点における所要時間をも考慮して自車の進行状況を判定することを特徴とする請求項5乃至請求項7のいずれか1項に記載のナビゲーション装置の自車位置表示方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2006−10609(P2006−10609A)
【公開日】平成18年1月12日(2006.1.12)
【国際特許分類】
【出願番号】特願2004−190996(P2004−190996)
【出願日】平成16年6月29日(2004.6.29)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成18年1月12日(2006.1.12)
【国際特許分類】
【出願日】平成16年6月29日(2004.6.29)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]